Estudo experimental duma turbina axial de reacção equipada ...
122
Estudo experimental duma turbina axial de reacção equipada com válvulas autorectifcadoras Gonçalo Filipe Silva Páris Fanha Dissertação para obtenção do Grau de Mestre em Engenharia Mecânica Orientadores: Prof. Luís Manuel de Carvalho Gato Prof. João Carlos de Campos Henriques Júri Presidente: Prof. Carlos Frederico Neves Bettencourt da Silva Orientador: Prof. Luís Manuel de Carvalho Gato Vogal: Prof. João Manuel Melo de Sousa Janeiro 2019
Transcript of Estudo experimental duma turbina axial de reacção equipada ...

Estudo experimental duma turbina axial de reacçãoequipada com válvulas autorectifcadoras
Gonçalo Filipe Silva Páris Fanha
Dissertação para obtenção do Grau de Mestre em
Engenharia Mecânica
Orientadores: Prof. Luís Manuel de Carvalho GatoProf. João Carlos de Campos Henriques
Júri
Presidente: Prof. Carlos Frederico Neves Bettencourt da SilvaOrientador: Prof. Luís Manuel de Carvalho Gato
Vogal: Prof. João Manuel Melo de Sousa
Janeiro 2019

ii

Para a Raquel, os meus pais e a minha estrela brilhante ...
iii

iv

Agradecimentos
O trabalho apresentado neste documento resulta de um longo projeto de 2 anos, onde me foi dada a
oportunidade de contactar, pela primeira vez, com um projeto real de engenharia. Os prazos, objetivos,
orcamentos e todas as restantes particularidades adjacentes a este tipo de trabalhos, desenvolveram
em mim capacidades nao so tecnicas como pessoais, pelo que saio deste longo caminho uma pessoa e
um engenheiro mais preparado para o futuro que se avizinha, no mercado de trabalho. Sem duvida, por
toda esta oportunidade, pela confianca e pelo apoio incondicional, devo um agradecimento especial ao
meu orientador, professor Luıs Gato. Sem a sua ajuda, teria sido de todo impossıvel concluir este longo
percurso.
Agradeco tambem ao professor Joao Henriques que, com a sua experiencia, me mostrou saıdas e
tecnicas que nao conhecia, para problemas que ameacavam a conclusao do projeto.
Agradeco tambem de um modo especial, ao Sr. Joaquim Frade e ao Sr. Pedro Alves, sem os quais
este projeto nunca teria saıdo do papel. Gracas ao seu empenho, dedicacao e experiencia foi possıvel
dar vida a este projeto e provar que, apesar de todas as dificuldades e percalcos, e sempre possıvel
chegar a bom porto.
A Maria Jose Neves que, apesar de nao ter influencia direta no projeto, foi incondicional no seu apoio
e disponibilidade para ajudar, em todas as materias. Foi sem duvida um elemento crucial neste meu
percurso, ajudando-me sempre com o sorriso na cara que, em muitas situacoes, me apaziguou.
Ao professor Jose Maria Andre, pela sua imensa boa disposicao e disponibilidade para ajudar.
Embora nao tenha recorrido muitas vezes a sua ajuda, a sua curiosidade e simpatia sempre que passava
no laboratorio, foram momentos que nao esquecerei.
Aos meus colegas de trabalho, em especial a Eng. Ana Carrelhas, agradeco tambem o apoio
demonstrado.
Aos meus pais cujo apoio foi, como sempre, tao incondicional quanto crucial. Todo este percurso
colocou muitas das minhas capacidades a prova e se cheguei ao fim dele, muito o devo a eles pelo apoio,
confianca e, nos momentos mais difıceis, esperanca que depositaram em mim. Uns mais perto, outros
mais longe, o vosso apoio foi sempre importantıssimo e a chave para desbloquear muitos problemas que
foram surgindo.
Agradeco ainda ao meu avo pela seu apoio, confianca e curiosidade em conhecer mais que o
caracteriza. Foi sem duvida um apoio importante, que me ajudou a manter o foco no sucesso do projeto.
Por ultimo, mas num lugar muito especial, agradeco a minha namorada, Eng. Raquel Gomes, que e
sem qualquer duvida o meu porto de abrigo. Foi um caminho sinuoso e muito longo, onde os problemas
surgiram muito frequentemente e com elevada complexidade, mas, se houve alguma luz ao fundo do
tunel que sempre me guiou, apoiou e levantou nos momentos de maior dificuldade foi ela.
v

vi

Resumo
A turbina tetra-radial equipada com valvulas autoretificadoras resulta de uma iteracao da versao inicial
da turbina tetra-radial, proposta em 2016 ao abrigo do projeto WETFEET. Esta variante foi totalmente
desenvolvida no Instituto Superior Tecnico, num projeto que envolveu a concecao, desenho, construcao
e ensaio de um modelo da turbina, com uma potencia de 30kW.
Este modelo foi concebido para ser testado tanto no laboratorio do IST, numa instalacao de 28kW
de potencia, como na Central de Energia das Ondas do Mutriku, em Espanha. Os primeiros ensaios
foram realizados no ambito deste trabalho, tendo-se preparado todo o sistema para os futuros ensaios.
Entre os sistemas desenvolvidos esta um inovador sistema de valvulas controladas por um sistema de
automacao industrial.
O processo de construcao da turbina provou ser possıvel diminuir os custos e complexidade de
producao da versao inicial da turbina tetra-radial, para alem de tornar a estrutura mais compacta e facil
de transportar. Tudo isto foi estudado por forma a que, em momento algum, a performance do dispositivo
fosse afetada.
O processo de montagem foi moroso e complexo, pelo numero de pecas a montar e tambem pela
sua volumetria. Durante e ate ao final da montagem surgiram inumeros problemas provenientes de erros
de producao alheios ao IST. Estes erros revelaram-se cruciais para a performance do dispositivo, que
ficou muito aquem do esperado. Neste sentido, serao necessarios trabalhos de verificacao e reparacao
num futuro proximo.
Palavras-chave: Energia das Ondas, Turbina Tetra-Radial, Consturcao de modelo, Estudo
experimental de modelo, Valvulas Autorectificadoras.
vii

viii

Abstract
The novel Tetra-Radial turbine equipped with self-rectifying valves arises as an iteration of the first
Tetra-Radial turbine, proposed under the WETFEET project back in 2016. This variant was totally
developed at Instituto Superior Tecnico, from the design to the testing stage of a 30 kW model.
This model was designed and planned to be tested both at IST Laboratory, whose installation as a
power of 28kW, and at Wave Energy Plant in Mutriku, Spain. First testing was performed during the work
presented in this document and all the structure was prepared to the second round of testing in Mutriku.
The construction process of this model assured the possibility of diminishing the production cost and
complexity, of the first version of the turbine. Specifically, it was possible to create a much more compact
structure, which is easier to assemble and transport. All the modifications were carefully studied, in order
to ensure that, under no circumstance, turbine’s performance was affected.
The assembling process was as time consuming as complex, due to the vast number of components
and its volumetry. During and until the end of it, several problems came up, due to production errors,
totally out of IST control. These mistakes were crucial to the underperformance of the model, during the
tests at IST. This implies that, in a near future, several verification and repair tasks have to be performed
in the model.
Keywords: Wave Energy, Tetra-Radial turbine, Model construction, Model testing, Self-Rectifying
valves
ix

x

Conteudo
Agradecimentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
Lista de Tabelas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
Lista de Figuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvii
Lista de Sımbolos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xxi
1 Introducao 1
1.1 Energia das Ondas - Evolucao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Classificacao de Sistemas de conversao de energia das ondas . . . . . . . . . . . . . . . 2
1.2.1 Coluna de Agua Oscilante (CAO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Turbina Wells . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 Turbina accao autorectificadora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.5 Turbina Bi-Radial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.6 Turbina Tetra-Radial Auto-Retificadora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.7 Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.8 Objectivo e Plano de Tese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Estudo Aerodinamico da Turbina 11
2.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Descricao da Turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Funcionamento da Turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Dimensoes e Caracterısticas do modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5 Estudo aerodinamico do Estator, Rotor e Conduta de Entrada . . . . . . . . . . . . . . . . 15
2.5.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5.2 Projeto da Conduta de Entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5.3 Projeto do Estator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.6 Projeto do Rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.7 Conduta de Saıda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.7.1 Condicao Inicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.7.2 Condicoes de Entrada e Saıda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
xi

2.7.3 Analise e Optimizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.8 Caracterısticas e Parametros chave do modelo . . . . . . . . . . . . . . . . . . . . . . . . 21
2.8.1 Dimensoes da turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.8.2 Velocidades do escoamento ao longo da turbina . . . . . . . . . . . . . . . . . . . 22
2.8.3 Evolucao da pressao no escoamento . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.8.4 Conclusao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3 Construcao do modelo 3D 26
3.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2 Requisitos do Projeto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3 Modelo 3D Final . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.3.1 Chassis de suporte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.3.1.1 Malha Superior do Chassis . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.3.1.2 Malha Inferior do Chassis . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3.1.3 Analise estrutural do Chassis . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.3.2 Modelo e seus componentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.3.2.1 Materiais Utilizados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.4 Conclusao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4 Controlo da Turbina 36
4.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.1.1 Controlo do binario eletromagnetico . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2 Peak Shaving . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.3 Sistema de Controlo da Turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.3.1 Sistema de Controlo do IST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.3.2 Circuito e Software de controlo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.3.2.1 Analise de Ω e ∆p . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.3.2.2 Controlo de Valvulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.3.2.3 Valve2Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.3.2.4 Emergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.3.2.5 Lei de Controlo da Turbina . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.3.2.6 Sinal Variavel e Ensaio . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.4 Sistema de Valvulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.4.1 Modo de Funcionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.4.1.1 Sinais de Entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.4.2 Sinais de Saıda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5 Construcao do modelo 51
5.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.2 Producao e montagem de sub-conjuntos . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
xii
5.2.1 Estator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.2.2 Rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.2.3 Chassis da Estrutura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.2.4 Difusor de Saıda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.2.5 Chapa Central . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.3 Pecas em resina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.4 Montagem Final . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6 Resultados 62
6.1 Instalacao laboratorio IST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.1.1 Valvula de Fecho rapido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.2 Instrumentacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.2.1 Pressao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.2.2 Temperatura e Humidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.2.3 Binario e Velocidade de Rotacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.2.4 Caudal Volumico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.3 Procedimento de ensaios experimentais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.3.1 Ensaio para a obtencao de curvas de funcionamento . . . . . . . . . . . . . . . . 68
6.3.2 Ensaio de binario de atrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.3.3 Ensaio de embalamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.4 Analise de Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.4.1 Binario de Atrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.4.1.1 Ensaio de Binario de Atrito . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.4.1.2 Ensaio de decaimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6.4.2 Ensaio de Embalamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6.4.3 Ensaio de Rendimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
7 Conclusoes e Trabalho Futuro 77
7.1 Trabalho Futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Bibliografia 78
A Producao Pecas de Resina 83
A.1 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
B Fichas Tecnicas 87
B.1 Atuadores Lineares FESTO EPCO 25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
B.2 Controlador de Atuadores FESTO CMMO . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
B.3 PLC OMRON CP1E-N60DR-A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
B.4 SKF 22215E . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
B.5 SKF 22210E . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
xiii

C Desenhos Tecnicos 92
C.1 Veio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
C.2 Desenho de Conjunto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
D Analise de Erros 96
D.1 Metodologia de Calculo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
D.2 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
xiv

Lista de Tabelas
1.1 Classificacao de tecnologias para conversao da energia das ondas . . . . . . . . . . . . . 3
1.2 Diferentes solucoes para turbina Wells e respetivos pontos positivos (a verde) e negativos
(a vermelho) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Estrutura da Tese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1 Dimensoes e Caracterısticas da turbina inicial e do modelo . . . . . . . . . . . . . . . . . 15
2.2 Dimensoes gerais da turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3 Dados tecnicos do modelo da turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.1 Caracterısticas globais do modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.1 Comprimento de cada um dos canais das valvulas . . . . . . . . . . . . . . . . . . . . . . 46
6.1 Pontos, Sensores e curvas de calibracao dos sensores de pressao . . . . . . . . . . . . . 66
6.2 Curvas de Calibracao do sensor de binario . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.3 Resultados ensaio de embalamento do modelo . . . . . . . . . . . . . . . . . . . . . . . . 73
D.1 Resultados de incerteza, para as curvas de funcionamento . . . . . . . . . . . . . . . . . 97
xv

xvi

Lista de Figuras
1.1 Preco da energia por tecnologia, em $/MWh [5] . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Distribuicao global da energia potencial disponıvel nas ondas - dados de 2017 [7] . . . . 2
1.3 Funcionamento de um dispositivo CAO - na figura encontra-se um dispositivo CAO [9] . . 3
1.4 Comparacao entre o rendimento T-W e turbina de acao em funcao de Φ[13] . . . . . . . . 5
1.5 Turbina Bi-Radial nas configuracoes de pas diretrizes fixas (a) e moveis (b) [13] . . . . . 6
1.6 Turbina Tetra-Radial. Estrutura Global (a) e vista em detalhada em corte, com indicacao
do sentido de escoamento (b) [17] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.7 Grafico comparativo dos rendimentos das varias turbinas disponıveis para solucoes de
CAO. MGV aplica-se a turbinas de acao com pas diretrizes moveis e FGV a turbinas de
acao com pas diretrizes fixas [13] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 Figura ilustrativa da turbina montada numa boia [19] . . . . . . . . . . . . . . . . . . . . . 12
2.2 Vista em corta da turbina, para a configuracao apresentada na figura 2.1[19] . . . . . . . 13
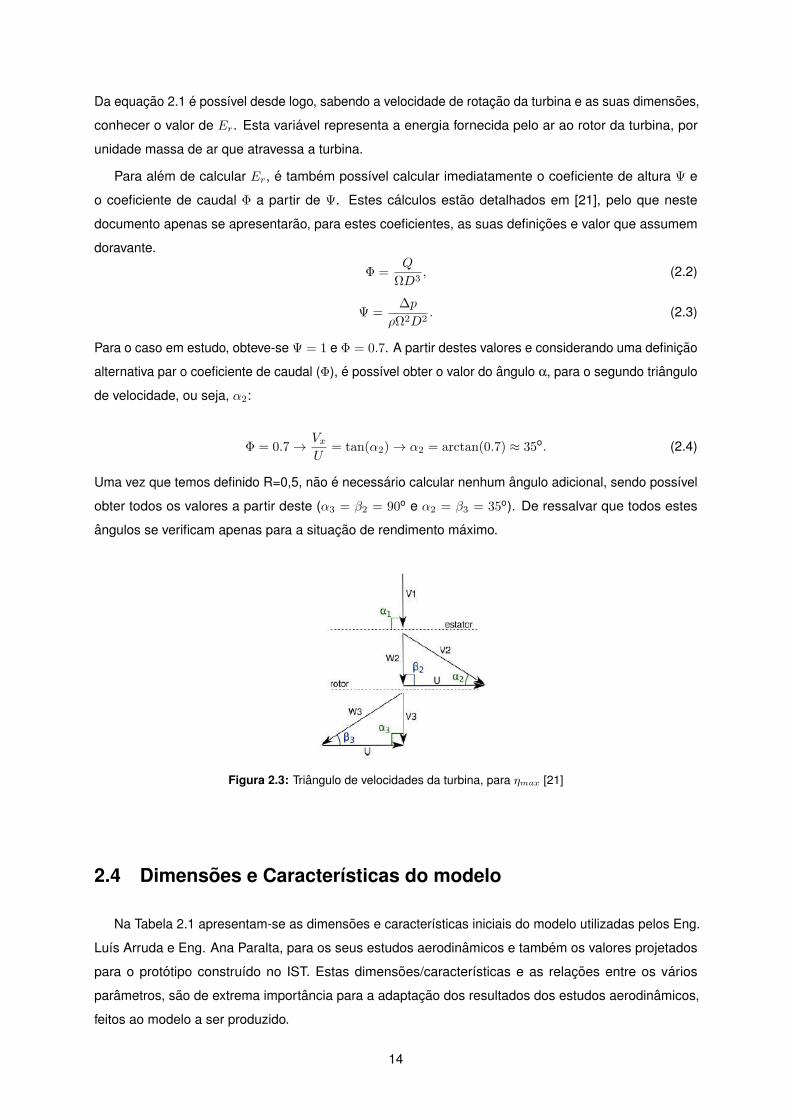
2.3 Triangulo de velocidades da turbina, para ηmax [21] . . . . . . . . . . . . . . . . . . . . . . 14
2.4 Malha para analise do escoamento na conduta de entrada . . . . . . . . . . . . . . . . . 16
2.5 Perfis da pa diretriz para 7 seccoes e tabela com posicao e angulos para cada seccao [21] 17
2.6 Triangulo de velocidades caracterizando o escoamento medio . . . . . . . . . . . . . . . 17
2.7 Analise da velocidade de escoamento em torno das pas diretrizes (esquerda) e pas do
rotor (direita) [20] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.8 Analise do modulo de velocidade ao longo da conduta inicial. Como se pode ver existe
uma grande zona de separacao, representada pelas setas a azul . . . . . . . . . . . . . . 19
2.9 (a) Conduta de Saıda Final (b) Conduta de Entrada. Pode ver-se a menor curvatura da
conduta (a), devido a necessidade de evitar a separacao do escoamento . . . . . . . . . 21
2.10 Triangulos de velocidade, angulos e velocidades para o modelo da turbina no ponto de
caudal otimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.11 Pressao ao longo da turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.1 Na figura 3.1a apresenta-se a configuracao de turbina com um difusor comum para as
duas zonas e um gerador entre as 2 zonas. No caso da figura 3.1b, sao utilizadas duas
unidades geradoras e dois difusores, um para cada zona [19]. . . . . . . . . . . . . . . . 27
3.2 Localizacao das Valvulas na estrutura da turbina . . . . . . . . . . . . . . . . . . . . . . . 28
xvii

3.3 Vista em alcado da configuracao final do modelo da turbina . . . . . . . . . . . . . . . . . 29
3.4 Chassis do modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.5 Malha Superior do Chassis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.6 Malha Inferior do Chassis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.7 Simulacao do comportamento da estrutura de suporte/chassis para uma carga de 1,5
vezes o peso total da estrutura e seus peirfericos . . . . . . . . . . . . . . . . . . . . . . . 33
3.8 CAD do modelo da turbina, na sua configuracao final . . . . . . . . . . . . . . . . . . . . 34
4.1 Media Temporal da potencia extraıda pela turbina em funcao da velocidade de rotacao
(grafico log-log) [13] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.2 Diagrama de controlo da turbina atraves da velocidade de rotacao [13] . . . . . . . . . . . 38
4.3 Variacao anual da potencia disponıvel atraves das ondas [32] . . . . . . . . . . . . . . . . 39
4.4 Peak-Shaving [33] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.5 Controlo das valvulas em Peak-Shaving [13] . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.6 Diagrama Geral do sistema de controlo do IST. O bloco ”SISTEMA EXTRA-IST”, representa
o sistema de automacao projetado no IST mas construıdo por uma entidade externa
especializada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.7 Software de controlo da turbina, implementado no sistema de controlo do IST . . . . . . . 43
4.8 Vista em corte (3D) da turbina. Valvulas representadas pelos segmento brancos nos
canais 1 e 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.9 Na figura do lado esquerdo apresenta-se o comportamento das valvulas para um funcionamento
normal e a direita para um funcionamento em Peak-Shaving. Na figura da direita, o grafico
vermelho apresenta o funcionamento em Peak-Shaving no rotor ativo e o grafico azul o
Peak-Shaving no rotor passivo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.10 Diagrama de funcionamento do sistema de valvulas . . . . . . . . . . . . . . . . . . . . . 47
4.11 Entradas do automato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.12 Saıdas do automato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.1 Chapas para montagem das pas do estator . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.2 Estator da Turbina, ja assemblado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.3 Montagem do rotor. (a) Volante de Inercia preparado para a montagem das pas. (b)
Fixacao das pas no volante. (c) Retificacao individual das pas . . . . . . . . . . . . . . . 53
5.4 Conduta do rotor preparada para a montagem . . . . . . . . . . . . . . . . . . . . . . . . 54
5.5 Rotor da Turbina, ja assemblado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.6 Difusor de saıda da turbina, durante a montagem da estrutura . . . . . . . . . . . . . . . 56
5.7 Sub-conjunto da chapa central preparado para a montagem na estrutura . . . . . . . . . 56
5.8 Procedimento para a obtencao de moldes de silicone.(a) Preparacao da caixa do molde
para enchimento com silicone. (b) Silicone em processo de cura para obtencao do molde.
(c) Silicone seco e molde preparado para retirar master e comecar a producao. . . . . . 58
xviii

5.9 Pecas em resina extraıdas de moldes de silicone. (a) Pa do estator. (b) Conduta de Saıda.
(c) Conduta de Entrada. (d) Pa do Rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.10 Montagem de um anel, respeitante a conduta de entrada. (a) Montagem do anel. (b) Anel
montado sem betumagem. (c) Anel ja betumado e montado no sub-conjunto respetivo . . 59
5.11 Montagem do modelo. (a) e (b) Montagem da conduta do rotor. (c) montagem do difusor
de saıda. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.12 Montagem do modelo (cont).(d) Montagem da caixa de rolamentos. (e) Montagem da
chapa central e veio. (f) Montagem do Rotor. (g) Finalizacao da montagem. (h) Modelo Final 61
6.1 Diagrama ilustrativo do funcionamento do laboratorio do IST . . . . . . . . . . . . . . . . 62
6.2 Imagem ilustrativa da instalacao presente no laboratorio do IST . . . . . . . . . . . . . . . 63
6.3 Montagem da turbina no pleno. (a) Preparacao para montagem. (b) Turbina montada . . 63
6.4 Quadro de comando das valvulas. (a) Vista exterior. (b) Vista Interior . . . . . . . . . . . 64
6.5 Manometros utilizados na calibracao dos sensores de pressao. (a) Manometro construıdo
no IST. (b) Micromanometro Betz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.6 Circuito de medicao de temperatura ambiente e pressao atmosferica atraves de um circuito
arduino com sensor BMP280 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.7 Caixa de ligacao dos sensores de pressao, com transformadores de sinal e fontes de
alimentacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.8 Circuito de medicao de temperatura ambiente atraves de um circuito arduino e sensor
DS18B20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.9 Medidor de binario e velocidade de rotacao . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.10 (a) Calibracao do sensor de binario. (b) Placa de aquisicao do sensor de binario . . . . . 68
6.11 Resultados ensaio binario de atrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6.12 Resultados ensaio de decaimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
6.13 Curvas de funcionamento do modelo para diferentes velocidades. . . . . . . . . . . . . . 74
6.14 Imagens do interior da turbina apos serie de ensaios. (a) Vista do lado direito da conduta,
onde existe contacto. (b) Vista do lado esquerdo da conduta, sem sinais de contacto. (c)
Marcas nas pas do rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6.15 Imagens do interior da turbina recolhidas com o apoio de uma sonda. (a) Espaco entre pa
e conduta e suficientemente grande para alojar um cartao dobrado. (b) Espaco entre pa e
conduta no lado direito do rotor. (c) Espaco entre pa e conduta, no lado oposto ao anterior 76
A.1 (a) Master colocado na caixa do molde. (b) Estrutura de fixacao da caixa e master . . . 84
A.2 Silicone em processo de cura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
A.3 Peca Extraıda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
A.4 Conduta de entrada teste composta por 6 pecas . . . . . . . . . . . . . . . . . . . . . . . 86
B.1 Dados Tecnicos dos atuadores utilizados no modelo . . . . . . . . . . . . . . . . . . . . . 87
B.2 Dados Tecnicos do controlador de atuadores utilizados no modelo . . . . . . . . . . . . . 88
xix

B.3 Dados Tecnicos do PLC OMRON CP1E-N60DR-A utilizado no modelo . . . . . . . . . . 89
B.4 Dados Tecnicos do rolamento SKF 22215E utilizado no modelo . . . . . . . . . . . . . . 90
B.5 Dados Tecnicos do rolamento SKF 22210E utilizado no modelo . . . . . . . . . . . . . . 91
C.1 Desenho tecnico do veio do modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
C.2 Desenho tecnico de conjunto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
xx

xxi

Lista de Sımbolos e Abreviaturas
η → Rendimento total estatico da trubina.
Φ→ Coeficiente de Caudal.
Π→ Coeficiente de Potencia.
Ψ→ Coeficiente de Potencia.
Ω→ Velocidade de rotacao da turbina.
ρ→ Massa especıfica do ar.
∆p→ Diferenca de pressao ao longo da turbina.
A→ Area de passagem num determinado ponto.
CD → Coeficiente de resistencia.
CL → Coeficiente de sustentacao.
D → Diametro da turbina.
Daero → Forca de resistencia.
Er → Energia fornecida pelo fluıdo a turbina por unidade de massa.
Humidity → Humidade do ar num determinado ponto.
I → Inercia da turbina.
Laero → Forca de sustentacao.
Q→ Caudal volumico do escoamento na turbina.
R→ Raio da turbina.
Re→ Numero de Reynolds.
T → Binario da turbina.
Taero → Binario aerodinamico.
Tat aero → Binario de atrito aerodinamico.
xxii
Tatrito → Binario de atrito.
Tchum → Atrito nas chumaceiras.
Tmec → Binario mecanico.
U → Velocidade de transporte.
Uv → Voltagem.
V → Modulo da velocidade do escoamento.
Va → Componente axial da velocidade do escoamento.
Vm → Velocidade media do escoamento.
Vr → Componente radial da velocidade do escoamento.
Vt → Componente tangencial da velocidade do escoamento.
W → Velocidade relativa do escoamento.
Wm → Caudal massico do escoamento.
a→ Paraametro da lei de controlo.
bc → Parametro da lei de controlo.
g → Aceleracao gravıtica.
p→ Pressao relativa num determinado ponto.
paero → Potencia aerodinamica da turbina.
patm → Pressao atmosferica num determinado ponto.
pgen → Potencia do gerador.
pstag → Pressao de estagnacao num determinado ponto.
pstatic → Pressao estatica num determinado ponto.
t→ Tempo.
z → Cota de um determinado ponto.
AI Entrada Analogica.
AO Saıda Analogica.
BP Turbina Wells com dois rotores que rodam no mesmo sentido.
C.L. Camada limite.
xxiii
CAO Coluna de Agua Oscilante.
CFD Computational Fluid Dynamics.
CR Turbina Wells com dois rotores que rodam em sentidos opostos.
DAQ Aquisicao de Dados.
DI Entrada Digital.
DO Saıda Digital.
HSSV High Speed Stopping Valve.
IST Instituto Superior Tecnico.
PLC Programmable Logic Controller.
T-W Turbina Wells.
USB Universal Serial Bus.
VC Volume de Controlo.
WEC Conversor de Energia das Ondas.
xxiv

Capıtulo 1
Introducao
1.1 Energia das Ondas - Evolucao
As ondas, geradas pelo vento, armazenam grandes quantidades de energia cinetica e potencial e,
por essa razao, sao ha muito tempo objeto de estudo com o intuito de se conseguir extrair e/ou utilizar
essa energia. Desses estudos concluıu-se que, em media, devido a elevada variabilidade temporal dos
estados marıtimos, apenas e possıvel aproveitar 10% a 25% da energia total disponıvel.
Os registos historicos permitem saber que a primeira patente relacionada com esta area foi preenchida
em 1799, por um frances de nome Girard [1]. No entanto, so muitos anos depois surgiu o primeiro
dispositivo WEC, criado por Yoshio Masuda [2, 3], cujo o desenvolvimento comecou em 1940. Este
dispositivo foi comercializado no Japao e Estados Unidos da America a partir de 1965.
Em 1973, a primeira grande crise do petroleo acelerou o desenvolvimento de varias tecnologias
relacionadas com as energias renovaveis, nomeadamente, a energia das ondas [4]. Nos ultimos
anos, a evolucao tem sido consideravel com a construcao de modelos a escala real e demonstracoes
comerciais. Em 2013, estimava-se que mais de 100 projetos na area da energia das ondas estivessem
em desenvolvimento [1].
A grande quantidade de tecnologias mostra que ainda nao se atingiu um ponto de convergencia, mas
tambem assegura que e possıvel extrair energia das ondas em diferentes condicoes e ambientes. Em
2017, estava globalmente instalada uma potencia de 8 MW, o que representa um crescimento de 100%
em relacao ao ano de 2016. Grande parte dessa potencia esta instalada na Europa. Portugal aprovou
um pacote de medidas no ultimo ano, para impulsionar novos desenvolvimentos nesta area. Contudo,
apesar do esforco mundial e do crescimento da potencia instalada, o preco da energia produzida atraves
desta tecnologia continua muito elevado, em relacao a outras energias renovaveis, como se pode ver na
Figura 1.1.
No futuro, com o objetivo de diminuir este valor, terao de ser encontrados novos materiais com
menor custo, aumentar a eficiencia dos sistemas, desenvolver novos tipos de amarracoes e sistemas de
controlo e tambem criar plataformas de sinergia entre varias tecnologias. Neste ultimo caso, supondo
uma sinergia entre a energia eolica offshore e a energia das ondas [6], nao so seria possıvel baixar
1

Figura 1.1: Preco da energia por tecnologia, em $/MWh [5]
o custo de instalacao e manutencao, como tambem aumentar a eficiencia do conjunto mantendo, em
grande parte, o impacto visual da instalacao.
Todas estas evolucoes serao de extrema importancia, no sentido de aumentar a competitividade desta
tecnologia e, por consequinte, aproveitar mais e melhor um recurso energetico ainda pouco explorado,
cujo potencial energetico global se estima em 3 TW [7].
Figura 1.2: Distribuicao global da energia potencial disponıvel nas ondas - dados de 2017 [7]
1.2 Classificacao de Sistemas de conversao de energia das ondas
Dada a variedade de tecnologias para a conversao da energia das ondas, surge a necessidade de,
segundo alguma logica ou metodologia, as classificar por grupos.
Qualquer que seja a metodologia de agrupamento utilizada, e importante distinguir aspetos como
qual o modo como e convertida a energia, ou seja, qual o princıpio fısico que permite a extracao de
energia ou qual o PTO, utilizado em cada tecnologia. De entre as varias metodologias possıveis, ira
adotar-se neste documento uma classificacao de acordo com a Tabela 1.1, abaixo apresentada.
2

Tabela 1.1: Classificacao de tecnologias para conversao da energia das ondas
Tipo de Sistema Power-Take-Off (PTO) ExemplosColuna de Agua Oscilante
(CAO)Turbina de Ar Spar-Buoy
Central do Pico
Corpo Oscilante Turbina/Motor Hidraulico WavebobPowerBuoy
Dispositivo de Galgamento Turbina Hidraulica para pequenaaltura de queda
Wave DragonSSG
Por ser a tecnologia utilizada no projeto a que se refere este documento, apenas iremos detalhar
a explicacao dos dispositivos CAO (para informacoes sobre os outros grupos na tabela apresentados
devera consultar-se [8]).
1.2.1 Coluna de Agua Oscilante (CAO)
Os sistemas CAO sao dispositivos de conversao de energia, com uma camara semi-submersa
que aprisiona uma bolsa de ar acima da superfıcie da coluna de agua. A camara tem uma abertura
inferior livre e uma abertura superior que comunica com o exterior por meio de uma turbina de ar. O
movimento das ondas faz com que a coluna de agua se comporte como um pistao, empurrando (quando
a onda sobe) e sugando (quando a onda desce) a bolsa de ar para fora e para dentro da camara,
respetivamente, forcando o ar a atravessar a turbina e, consequentemente, gerando energia. Este
movimento esta ilustrado na Figura 1.3.
Qualquer sistema CAO, independentemente de ser fixo ou movel, funciona segundo este princıpio,
podendo variar o tipo de turbina utilizado. Nas seccoes seguintes apresentam-se os varios tipos de
turbinas utilizados.
Figura 1.3: Funcionamento de um dispositivo CAO - na figura encontra-se um dispositivo CAO [9]
1.3 Turbina Wells
Alan A. Wells inventou em 1976 uma nova tipologia de turbina, que conta com pas de perfil simetrico,
sem torcao e dispostas radialmente com um angulo de calagem de 90o [10]. Esta turbina, a que se deu
3
o nome de turbina Wells, e uma das mais utilizadas na conversao de energia das ondas e tem como
caracterıstica chave, o facto de nao ser sensıvel ao sentido do escoamento. Esta caracterıstica esta
diretamente relacionada com a simetria das pas e permite dispensar o uso de valvulas retificadoras.
Contudo este dispositivo, apresenta uma queda abrupta no rendimento, para angulos de incidencia
elevados, uma vez que estes provocam picos de succao intensos no bordo de ataque das pas que,
seguidos de elevados gradientes de pressao adversa, levam a separacao da camada limite no extradorso
das pas do rotor.
As turbinas Wells estao ou estiveram instaladas em inumeros dispositivos espalhados pelo Globo, de
entre os quais se podem destacar as instalacoes do Mutriku em Espanha (com um total de 296 kW de
potencia instalada, desde 2009) ou Toftestallen na Noruega (500 kW-1985).
Tendo em conta o problema da perda subita de rendimento que esta turbina apresenta, muitos foram
os estudos feitos com a finalidade de encontrar possıveis solucoes. Dessa procura resultaram tres
possıveis solucoes, que se encontram apresentadas na Tabela 1.2 [11].
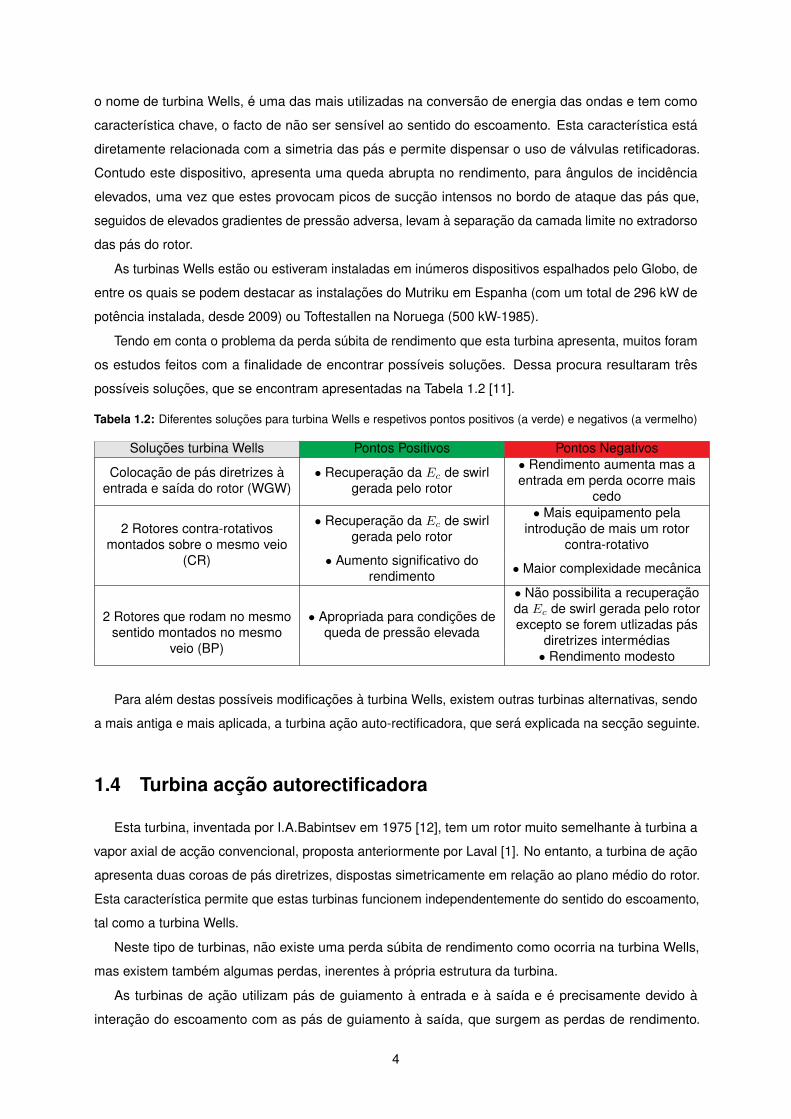
Tabela 1.2: Diferentes solucoes para turbina Wells e respetivos pontos positivos (a verde) e negativos (a vermelho)
Solucoes turbina Wells Pontos Positivos Pontos Negativos
Colocacao de pas diretrizes aentrada e saıda do rotor (WGW)
• Recuperacao da Ec de swirlgerada pelo rotor
• Rendimento aumenta mas aentrada em perda ocorre mais
cedo
2 Rotores contra-rotativosmontados sobre o mesmo veio
(CR)
• Recuperacao da Ec de swirlgerada pelo rotor
• Mais equipamento pelaintroducao de mais um rotor
contra-rotativo• Aumento significativo do
rendimento • Maior complexidade mecanica
2 Rotores que rodam no mesmosentido montados no mesmo
veio (BP)
• Apropriada para condicoes dequeda de pressao elevada
• Nao possibilita a recuperacaoda Ec de swirl gerada pelo rotorexcepto se forem utlizadas pas
diretrizes intermedias• Rendimento modesto
Para alem destas possıveis modificacoes a turbina Wells, existem outras turbinas alternativas, sendo
a mais antiga e mais aplicada, a turbina acao auto-rectificadora, que sera explicada na seccao seguinte.
1.4 Turbina accao autorectificadora
Esta turbina, inventada por I.A.Babintsev em 1975 [12], tem um rotor muito semelhante a turbina a
vapor axial de accao convencional, proposta anteriormente por Laval [1]. No entanto, a turbina de acao
apresenta duas coroas de pas diretrizes, dispostas simetricamente em relacao ao plano medio do rotor.
Esta caracterıstica permite que estas turbinas funcionem independentemente do sentido do escoamento,
tal como a turbina Wells.
Neste tipo de turbinas, nao existe uma perda subita de rendimento como ocorria na turbina Wells,
mas existem tambem algumas perdas, inerentes a propria estrutura da turbina.
As turbinas de acao utilizam pas de guiamento a entrada e a saıda e e precisamente devido a
interacao do escoamento com as pas de guiamento a saıda, que surgem as perdas de rendimento.
4

Figura 1.4: Comparacao entre o rendimento T-W e turbina de acao em funcao de Φ[13]
Esta perdas sao perdas de pressao de estagnacao por choque, ja que nao e possıvel garantir de modo
simultaneo um angulo de entrada no rotor correto para o escoamento relativo e um angulo tambem
correto para o escoamento a saıda do rotor, ou seja, uma vez que o angulo a saıda do rotor nao e o
apropriado surgem as perdas de rendimento.
Dado o facto desta turbina ser encarada como uma alternativa a turbina Wells, a comparacao
entre ambas e inevitavel. Dessa comparacao (Figura 1.4) e visıvel que, apesar de ter um pico de
rendimento mais baixo que a turbina Wells, a turbina de acao apresenta um rendimento muito superior
para coeficientes de caudal (Φ) elevados. Para alem disso, por ser menos rotativa, a turbina de acao
nao tem tantas restricoes quanto a queda de pressao, podendo ser utilizada para valores mais elevados
desta variavel.
Para minorar as perdas previamente indicadas, e possıvel dotar estas turbinas de pas de guiamento
moveis. Esta introducao resolve os problemas do angulo de incidencia a saıda do rotor, aumentando
significativamente o rendimento da maquina, mas cria um problema quanto a fiabilidade e durabilidade
do sistema, devido a introducao de varias partes moveis no sistema. Esta tecnologia foi introduzida e
testada no projeto europeu CORES [14].
1.5 Turbina Bi-Radial
Num esforco para desenvolver continuamente novas e melhores solucoes para o aproveitamento da
energia das ondas, foi proposta em 2010 por A.Falcao et al a turbina Bi-Radial [15]. Esta turbina de
acao auto-rectificadora e simetrica ao plano perpendicular ao eixo de rotacao (Figura 1.7) e tem como
principal caracterıstica o facto de tanto a entrada como a saıda do escoamento serem radiais.
Este dispositivo, concebido no Instituto Superior Tecnico, esta desenhado para funcionar em
aparelhos CAO e tem como principal objetivo reduzir as perdas que se verificavam na turbina de
acao auto-rectificadora. Tendo em conta que a perda de rendimento estava relacionada com a interacao
do escoamento com a coroa de pas diretrizes a saıda, pensaram-se tres solucoes possıveis, para que a
5

(a)
(b)
Figura 1.5: Turbina Bi-Radial nas configuracoes de pas diretrizes fixas (a) e moveis (b) [13]
turbina bi-radial nao apresente o mesmo problema.
Na figura 1.7a) apresenta-se a primeira solucao, que consiste no afastamento das pas de guiamento
fixas radialmente, ou seja, o escoamento ao sair encontra as pas diretrizes mais tarde do que encontraria
na turbina de acao, levando a uma perda de energia cinetica, o que diminui as perdas por pressao
de estagnacao a saıda. Contudo, esta solucao tem o inconveniente de provocar o aparecimento de
camadas limite indesejadas a entrada do rotor.
Surge entao a segunda solucao, apresentada na Figura 6b), que consiste na utilizacao de pas
diretrizes moveis. Neste caso, as pas sao movidas no sentido axial com o objetivo de apenas
intrometerem no escoamento de entrada, desimpedindo a saıda. Para evitar os problemas de perda de
energia cinetica a entrada verificados na solucao anterior, nesta hipotese, as pas diretrizes devem ter
uma distancia ao rotor o mais pequena possıvel. Com esta solucao, nao existem as perdas a saıda ja
que nao existe estator de saıda, pelo que e mitigado o problema da perda de rendimento, mas cria-se
um problema de fiabilidade, durabilidade, manutencao e controlo devido a introducao de pas deslizantes.
Por ultimo, existe ainda uma terceira solucao, que utiliza varias coroas de pas diretrizes tanto a
entrada como a saıda, o que garante um bom guiamento a entrada e pouco bloqueamento a saıda.
Todavia, esta solucao implica um aumento do custo de producao e da complexidade do sistema, devido
a introducao das varias coroas de pas diretrizes [16].
1.6 Turbina Tetra-Radial Auto-Retificadora
Esta e a turbina mais recentemente desenvolvida e testada pelo grupo de energia das ondas do
Instituto Superior Tecnico [17, 18]. Na base do seu desenvolvimento esteve a conceptualizacao e
6

(a)
(b)
Figura 1.6: Turbina Tetra-Radial. Estrutura Global (a) e vista em detalhada em corte, com indicacao do sentido deescoamento (b) [17]
estudo de uma conduta de entrada/saıda inovadora. O diagrama da turbina e a conduta de saıda estao
apresentadas na Figura 1.7.
Este dispositivo foi desenhado para aplicacoes CAO e utiliza dois rotores axiais convencionais, que
giram no mesmo sentido (podendo ou nao estar montados no mesmo veio e conectadas ao mesmo
gerador) num funcionamento alternado.
Para entender o conceito de funcionamento da turbina e muito importante, em primeiro lugar, destacar
que a turbina esta ligada a um espaco A (diga-se a atmosfera) e a um espaco B (camara ou CAO),
podendo o escoamento fluir de A para B (caso pA>pB) ou de B para A (caso pA<pB ). Como visıvel
na Figura 1.7, os dois rotores encontram-se em extremos geometricamente opostos da turbina, sendo
esse posicionamento explicado pelo facto de um rotor (diga-se rotor 1) estar alocada unicamente ao
escoamento de A para B e o outro (rotor 2) estar dedicada ao escoamento inverso.
Assim, no caso ideal, quando o rotor 1 funciona, o rotor 2 estara sem escoamento e vice-versa. Sao
utilizadas valvulas que fecham a turbina que nao esta, naquele momento, em funcionamento.
A inovadora conduta de entrada/escape [18] permite evitar recirculacao de fluıdo entre A e B (como
visıvel na figura 1.7b), onde existe uma separacao clara entre A e B).
As turbinas axiais convencionais tem um rendimento superior ao que se verifica para turbinas de
acao auto-retificadoras ou turbina Wells, nao sendo este caso uma excecao. No entanto, este tipo de
construcao introduz elevada complexidade na construcao e no controlo. Entre outras particularidades, e
muito importante evitar as perdas no rotor passivo (rotor que nao esta em funcionamento), para evitar a
diminuicao do rendimento da maquina.
A construcao e ensaio desta turbina [17] permitiram mostrar que o seu rendimento, tal como
expectavel, e mais elevado do que acontece para as outras solucoes ja mencionadas. Apesar disso, a
construcao revelou-se extremamente complexa e dispendiosa, sendo esta a grande desvantagem desta
turbina. Acresce ainda o facto de, devido ao facto de esta ser uma maquina radial, ocorrerem elevadas
diferencas de pressao que levam a existencia de elevadas perdas aerodinamicas, associadas ao rotor
passivo.
Na figura 1.7, mostra-se um grafico do rendimento das varias turbinas disponıveis para solucoes de
7

Figura 1.7: Grafico comparativo dos rendimentos das varias turbinas disponıveis para solucoes de CAO. MGVaplica-se a turbinas de acao com pas diretrizes moveis e FGV a turbinas de acao com pas diretrizes fixas [13]
CAO, onde e visıvel que a turbina tetra-radial e, sem qualquer duvida, a maquina com maior rendimento.
1.7 Motivacao
Como perceptıvel pela contextualizacao historica feita anteriormente, o aproveitamento da energia
das ondas tem sido, nas ultimas decadas, objeto de estudo aprofundado, com resultados significativos
no que toca ao desenvolvimento de novas tecnologias e dispositivos, para o aproveitamento desta fonte
de energia. A turbina tetra-radial foi um dos ultimos grandes avancos a par com a turbina bi-radial que,
por ser ensaiada em condicoes proximas da realidade, tem suscitado enorme interesse.
No caso concreto da turbina tetra-radial, existem dados que mostram o seu elevado rendimento
mas, a construcao do prototipo mostrou que os custos e a complexidade da construcao sao demasiado
elevados. Por essa razao, houve um esforco para a restruturacao da configuracao da turbina que
resultou na patente [19]. Este documento apresenta um dispositivo com dois rotores axiais convencionais
apetrechados com difusores de entrada e saıda, semelhantes aos utilizados nos ventiladores.
Tal como acontece na construcao de qualquer prototipo, teve de se comecar por uma analise
computacional, com recurso a software de CFD. Nesta analise, dimensionaram-se a conduta de entrada
(hub e shroud), as pas diretrizes de entrada e o rotor, ficando a faltar a conduta de saıda (hub e shroud).
Os trabalhos de analise e construcao do prototipo deram origem a trabalhos de dissertacao de tese de
mestrado ( [20, 21] ).
Dado o objetivo de construir o modelo desta nova turbina tetra-radial, apos a conclusao da analise
computacional, foi necessario adaptar a configuracao inicial apresentado na patente. O modelo sera
testado tanto no laboratorio do Instituto Superior Tecnico como na Central de Energia das Ondas do
Mutriku em Espanha e, por essa razao, tem de ser adaptado para assegurar o bom funcionamento
em ambas as situacoes. Entre essas alteracoes teve de ser desenhada uma estrutura de suporte da
turbina (chassis) com pontos de fixacao ao chao para evitar vibracoes. Tal como aconteceu com o
8

projeto aerodinamico, tambem o projeto estrutural tem de comecar com uma analise computacional, feita
previamente a construcao.
Para alem do estudo aerodinamico e estrutural, acresce ainda o controlo da turbina, nomeadamente,
das valvulas que asseguram, tal como discutido no capıtulo de apresentacao da turbina, o bom
rendimento da maquina. As valvulas de elevada velocidade (HSSV) tem de ter um controlo apertado que
permita o controlo de potencia (Peak Shaving), apresentado em detalhe mais adiante neste documento.
Este controlo envolveu tambem um estudo aprofudado no que toca a automacao do sistema.
O objectivo maior deste estudo e provar que a turbina tetra-radial, nesta sua ultima configuracao, e
uma alternativa muito valida para sistemas de CAO, com um rendimento elevado e custos de manutencao
reduzidos.
1.8 Objectivo e Plano de Tese
Tal como brevemente aflorado na seccao anterior, o objetivo desta tese e a construcao e estudo
experimental de uma turbina tetra-radial, com base na nova patente desenvolvida no Instituto Superior
Tecnico [19]. Esta turbina surge da continuacao do estudo do projeto inicial, sendo que ja se dispoe dos
dados e da experiencia relativas aos ensaios previamente feitos ao abrigo do projeto WETFEET [22] (foi
no ambito deste projeto europeu que se desenvolveu o prototipo inicial da turbina tetra-radial).
Este estudo pretende, por um lado mostrar que a turbina tetra-radial e uma alternativa valida para
solucoes de aproveitamento da energia das ondas, atraves de sistemas de CAO, contando com um
rendimento elevado para um espectro de coeficientes de caudal alargado e por outro lado, resolver os
problemas de construcao e de custos previamente verificados devido a conduta inicialmente escolhida e
desenvolvida.
Para atingir este objetivo final, e necessario concluir uma sequencia de procedimentos abaixo
apresentados na Tabela 1.3.
9

Tabela 1.3: Estrutura da Tese
Procedimento Detalhes
1. Finalizacao do estudo aerodinamicoda turbina
E necessario concluir a analise CFD da turbina, nomeadamente,o desenho do difusor de saıda da turbina. Esta analise recorre ao
software de CFD Numeca, ja utilizado no IST em diversosprojetos.
2. Adaptacao dos calculos as novasdimensoes da turbina
Os calculos e analises previamente realizados (dimensionamentodo estator, rotor e conduta de entrada) tiveram em conta
dimensoes diferentes das atuais, pelo que e necessario verificare adaptar esses calculos as dimensoes agora pretendidas. Feitaesta alteracao, e necessario construir uma datasheet da turbinacom as suas principais dimensoes, caraterısticas, triangulos de
velocidade, etc . . .
3. Modelacao 3D da turbina erespetiva estrutura de suporte
Concluıdo o projeto aerodinamico e definidas as caracterısticasda turbina, esta sera modelada em 3D com recurso aos
softwares SolidWorks e KeyShot. Esta modelacao inclui a analiseestrutural dos componentes, a escolha de materiais e processos
de fabrico e detalhes de montagem.
4. Producao dos componentes
Neste ponto, sao escolhidos os fornecedores, encomendadas aspecas a realizar fora do IST e produzidas internamente as
restantes. Esta producao inclui pecas produzidas em resina comrecurso a moldes de madeira e silicone.
5. Estudo, encomenda e producao dosistema de automacao e controlo
O sistema de controlo da turbina, do qual fazem parte asvalvulas, tem de ser estudado e desenvolvido no IST. Neste
ponto, e desenhado o sistema e sao encomendados todos oscomponentes
6. Montagem da turbinaCom recurso a guias previamente realizados, a turbina e
montada no IST.
7. Ensaio da turbina e analise deresultados
A turbina e ensaiada no IST e no Mutriku sendo os resultadosanalisados para a producao do documento da tese.
10

Capıtulo 2
Estudo Aerodinamico da Turbina
2.1 Introducao
Tal como previamente abordado, os resultados obtidos da turbina tetra-radial foram muito positivos,
mas deixaram clara a necessidade de redesenhar alguns componentes para que o custo de producao
da turbina fosse mais baixo.
Dessa necessidade, resulta a turbina apresentada neste documento que, sendo uma iteracao do
projeto anterior, apresenta varias modificacoes substanciais. Nesta versao, utilizam-se difusores de
entrada e saıda semelhantes aos utilizados nos ventiladores, que transformarao o escoamento radial em
axial (na entrada) ou o escoamento axial em radial (na saıda). Atraves desta solucao, mantem-se as
vantagens da utilizacao da turbina inicial, mas resolvem-se os problemas associados a construcao da
conduta, o que representa uma melhoria consideravel.
O inıcio do estudo aerodinamico, o passo inicial para a obtencao do modelo, deu origem a varias
dissertacoes de mestrado, nomeadamente, a tese do Eng. Luıs Arruda [21], que aborda o desenvolvimento
da conduta de entrada e estator, e a dissertacao da Eng. Ana Paralta [20], desenvolvendo o rotor e
respetivas pas.
Dado o objetivo desta tese, estas duas dissertacoes foram de extrema importancia pois foi a partir
das conclusoes delas, que se desenharam alguns dos componentes do modelo final. No entanto, e
importante notar que inicialmente as dimensoes eram diferentes das que se verificam no modelo final.
Esta diferenca, obriga a adaptar os resultados dos estudos anteriores, para que se mantenham os
mesmos resultados aerodinamicos e de rendimento, com uma turbina de diferentes dimensoes. Apesar
de grande parte do estudo aerodinamico ja estar feito, decorrente das teses referidas, faltava ainda
desenvolver a conduta de saıda da turbina. Esta conduta, semelhante a um difusor de ventilador,
transforma o escoamento que sai do rotor, idealmente apenas com componente axial, num escoamento
unicamente radial.
O estudo aerodinamico da conduta recorreu ao software de CFD Numeca, com base em estrategias
disponıveis na literatura [23–25] , e nas seccoes seguintes ira abordar-se detalhadamente este estudo.
11
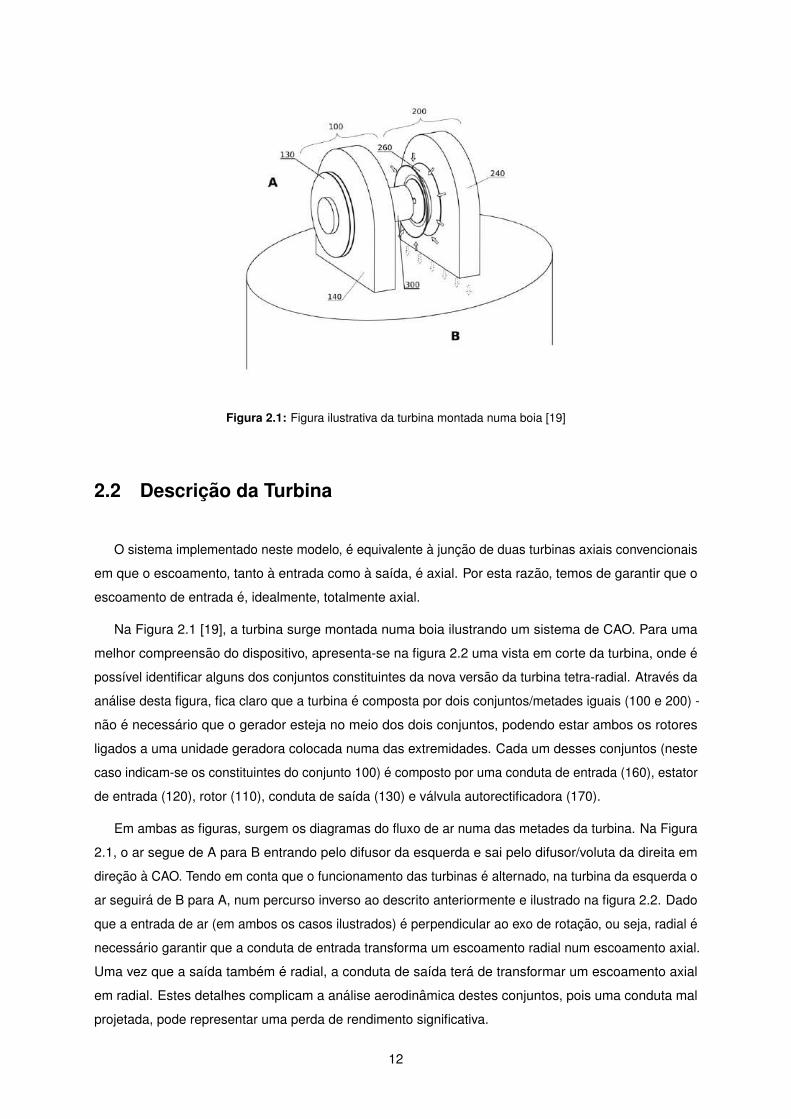
Figura 2.1: Figura ilustrativa da turbina montada numa boia [19]
2.2 Descricao da Turbina
O sistema implementado neste modelo, e equivalente a juncao de duas turbinas axiais convencionais
em que o escoamento, tanto a entrada como a saıda, e axial. Por esta razao, temos de garantir que o
escoamento de entrada e, idealmente, totalmente axial.
Na Figura 2.1 [19], a turbina surge montada numa boia ilustrando um sistema de CAO. Para uma
melhor compreensao do dispositivo, apresenta-se na figura 2.2 uma vista em corte da turbina, onde e
possıvel identificar alguns dos conjuntos constituintes da nova versao da turbina tetra-radial. Atraves da
analise desta figura, fica claro que a turbina e composta por dois conjuntos/metades iguais (100 e 200) -
nao e necessario que o gerador esteja no meio dos dois conjuntos, podendo estar ambos os rotores
ligados a uma unidade geradora colocada numa das extremidades. Cada um desses conjuntos (neste
caso indicam-se os constituintes do conjunto 100) e composto por uma conduta de entrada (160), estator
de entrada (120), rotor (110), conduta de saıda (130) e valvula autorectificadora (170).
Em ambas as figuras, surgem os diagramas do fluxo de ar numa das metades da turbina. Na Figura
2.1, o ar segue de A para B entrando pelo difusor da esquerda e sai pelo difusor/voluta da direita em
direcao a CAO. Tendo em conta que o funcionamento das turbinas e alternado, na turbina da esquerda o
ar seguira de B para A, num percurso inverso ao descrito anteriormente e ilustrado na figura 2.2. Dado
que a entrada de ar (em ambos os casos ilustrados) e perpendicular ao exo de rotacao, ou seja, radial e
necessario garantir que a conduta de entrada transforma um escoamento radial num escoamento axial.
Uma vez que a saıda tambem e radial, a conduta de saıda tera de transformar um escoamento axial
em radial. Estes detalhes complicam a analise aerodinamica destes conjuntos, pois uma conduta mal
projetada, pode representar uma perda de rendimento significativa.
12
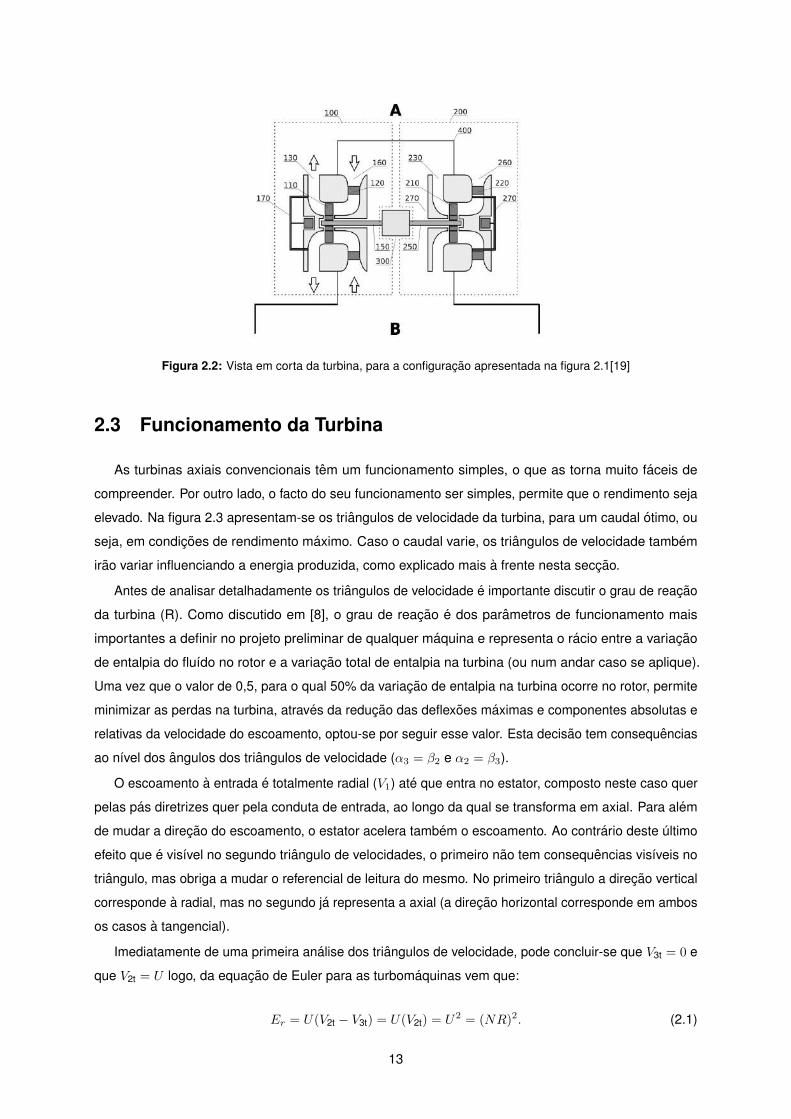
Figura 2.2: Vista em corta da turbina, para a configuracao apresentada na figura 2.1[19]
2.3 Funcionamento da Turbina
As turbinas axiais convencionais tem um funcionamento simples, o que as torna muito faceis de
compreender. Por outro lado, o facto do seu funcionamento ser simples, permite que o rendimento seja
elevado. Na figura 2.3 apresentam-se os triangulos de velocidade da turbina, para um caudal otimo, ou
seja, em condicoes de rendimento maximo. Caso o caudal varie, os triangulos de velocidade tambem
irao variar influenciando a energia produzida, como explicado mais a frente nesta seccao.
Antes de analisar detalhadamente os triangulos de velocidade e importante discutir o grau de reacao
da turbina (R). Como discutido em [8], o grau de reacao e dos parametros de funcionamento mais
importantes a definir no projeto preliminar de qualquer maquina e representa o racio entre a variacao
de entalpia do fluıdo no rotor e a variacao total de entalpia na turbina (ou num andar caso se aplique).
Uma vez que o valor de 0,5, para o qual 50% da variacao de entalpia na turbina ocorre no rotor, permite
minimizar as perdas na turbina, atraves da reducao das deflexoes maximas e componentes absolutas e
relativas da velocidade do escoamento, optou-se por seguir esse valor. Esta decisao tem consequencias
ao nıvel dos angulos dos triangulos de velocidade (α3 = β2 e α2 = β3).
O escoamento a entrada e totalmente radial (V1) ate que entra no estator, composto neste caso quer
pelas pas diretrizes quer pela conduta de entrada, ao longo da qual se transforma em axial. Para alem
de mudar a direcao do escoamento, o estator acelera tambem o escoamento. Ao contrario deste ultimo
efeito que e visıvel no segundo triangulo de velocidades, o primeiro nao tem consequencias visıveis no
triangulo, mas obriga a mudar o referencial de leitura do mesmo. No primeiro triangulo a direcao vertical
corresponde a radial, mas no segundo ja representa a axial (a direcao horizontal corresponde em ambos
os casos a tangencial).
Imediatamente de uma primeira analise dos triangulos de velocidade, pode concluir-se que V3t = 0 e
que V2t = U logo, da equacao de Euler para as turbomaquinas vem que:
Er = U(V2t − V3t) = U(V2t) = U2 = (NR)2. (2.1)
13
Da equacao 2.1 e possıvel desde logo, sabendo a velocidade de rotacao da turbina e as suas dimensoes,
conhecer o valor de Er. Esta variavel representa a energia fornecida pelo ar ao rotor da turbina, por
unidade massa de ar que atravessa a turbina.
Para alem de calcular Er, e tambem possıvel calcular imediatamente o coeficiente de altura Ψ e
o coeficiente de caudal Φ a partir de Ψ. Estes calculos estao detalhados em [21], pelo que neste
documento apenas se apresentarao, para estes coeficientes, as suas definicoes e valor que assumem
doravante.
Φ =Q
ΩD3, (2.2)
Ψ =∆p
ρΩ2D2. (2.3)
Para o caso em estudo, obteve-se Ψ = 1 e Φ = 0.7. A partir destes valores e considerando uma definicao
alternativa par o coeficiente de caudal (Φ), e possıvel obter o valor do angulo α, para o segundo triangulo
de velocidade, ou seja, α2:
Φ = 0.7→ VxU
= tan(α2)→ α2 = arctan(0.7) ≈ 35o. (2.4)
Uma vez que temos definido R=0,5, nao e necessario calcular nenhum angulo adicional, sendo possıvel
obter todos os valores a partir deste (α3 = β2 = 90o e α2 = β3 = 35o). De ressalvar que todos estes
angulos se verificam apenas para a situacao de rendimento maximo.
Figura 2.3: Triangulo de velocidades da turbina, para ηmax [21]
2.4 Dimensoes e Caracterısticas do modelo
Na Tabela 2.1 apresentam-se as dimensoes e caracterısticas iniciais do modelo utilizadas pelos Eng.
Luıs Arruda e Eng. Ana Paralta, para os seus estudos aerodinamicos e tambem os valores projetados
para o prototipo construıdo no IST. Estas dimensoes/caracterısticas e as relacoes entre os varios
parametros, sao de extrema importancia para a adaptacao dos resultados dos estudos aerodinamicos,
feitos ao modelo a ser produzido.
14
Tabela 2.1: Dimensoes e Caracterısticas da turbina inicial e do modelo
Dimensoes IniciaisDexterior rotor = 1 m Dint rotor
Dext rotor= 0.68 Ω = 750 rpm
Dimensoes do ModeloDexterior rotor = 0.5 m Dint rotor
Dext rotor= 0.68 Ω = 3000 rpm
2.5 Estudo aerodinamico do Estator, Rotor e Conduta de Entrada
2.5.1 Introducao
Para o estudo da conduta de entrada e estator, utilizaram-se os softwares de CFD Numeca-Fine/Turbo
e Ansys-Fluent, com o objetivo final de obter as geometrias de ambos os componentes. Dado que
este estudo nao e o objetivo desta tese, neste documento apenas se explicitam os tracos gerais e as
conclusoes desta analise.
Os programas utilizados, tanto nesta analise como no estudo da conduta de saıda, recorrem ao
Metodo dos Volumes Finitos que, de uma forma simplificada, consiste em discretizar um volume fısico
atraves da sua divisao em pequenos volumes de controlo (VC), onde sao aplicadas as equacoes
fundamentais da Mecanica dos Fluidos, com o intuito de simular o escoamento iterativamente (com
propriedades e caracterısticas pre-definidas pelo utilizador). Para fazer esta simulacao e necessario,
em primeiro lugar, criar/gerar a malha que divide o volume em VC podendo utilizar-se um programa
especıfico para o efeito ou aproveitar as capacidades dos programas acima mencionados. Neste caso,
optou-se pela segunda via, ou seja, dado que os programas utilizados permitem a total integracao de
processos desde a geracao da malha ate a simulacao e analise de resultados nao foi necessario recorrer
a qualquer outro software.
Para uma melhor compreensao do processo que leva a simulacao do escoamento no volume total, e
importante entender que a divisao aleatoria ou estruturada desse volume leva a criacao de uma malha
composta por celulas e nos/vertices. Assim, uma malha 2D e composta por celulas geometricamente
definidas por polıgonos, enquanto que uma malha 3D e composta por um conjunto de prismas.
Em qualquer uma das analises apresentadas nesta tese, utilizam-se curvas de Bezier para gerar
as malhas necessarias a analise. Os resultados sao essenciais a construcao do modelo, permitindo
compreender o desempenho dos varios elementos estudados e fornecendo as geometrias para elaboracao
do desenho CAD [21].
2.5.2 Projeto da Conduta de Entrada
Ao longo da analise destes dois componentes, utilizaram-se o Ansys-Fluent para escoamentos
bidimensionais e o Numeca-Fine/Turbo para os tridimensionais (escolha relacionada com a facilidade de
utilizacao dos programas nos referidos escoamentos).
15

(a) (b)
Figura 2.4: Malha para analise do escoamento na conduta de entrada
A analise aerodinamica da conduta de entrada e do estator tem como objetivo projetar componentes
que tornem a turbina o mais eficiente possıvel, tendo em conta as condicoes/caracterısticas de
funcionamento pre definidas. Para alem de maximizar o rendimento da maquina, sao tambem requisitos
a minimizacao das perdas de carga ao longo da turbina, evitar a separacao da camada limite (C.L.) e
adaptar os componentes em estudo ao rotor desenvolvido em [20].
A conduta de entrada tem obrigatoriamente uma entrada radial e uma saıda axial numa estrutura de
revolucao axissimetrica, que devera tambem acelerar o escoamento da entrada ate ao rotor.
Para fazer a analise da conduta, a malha tem duas zonas distintas que diferenciam a zona de camada
limite, proxima das paredes da conduta, da zona de escoamento potencial, no interior do escoamento. A
primeira obriga a cuidados redobrados, ja que e necessario captar bem as interacoes entre o escoamento
e a parede [26]. Por essa razao, e necessario garantir que a distancia adimensional a parede da conduta
e menor que 1 (y+ < 1), o que leva a uma densidade de elementos crescente no sentido do escoamento
potencial para as paredes da conduta.
A figura 2.4. ilustra a malha final que permitiu a simulacao do escoamento na conduta de entrada.
Atraves da figura 2.4b e possıvel ver as duas zonas distintas da malha.
2.5.3 Projeto do Estator
Dada a configuracao da turbina (tipo Kaplan), as pas diretrizes encontram-se a montante do rotor e
da conduta de entrada, estando confinadas a uma zona de dois discos paralelos onde serao fixas. Para
alem disso, e importante ressalvar que, durante o projeto da pa, e crucial ter em conta a presenca de
camada limite junto ao intra e extradorso das pas.
No caso das pas diretrizes, e necessario garantir que o perfil respeita os angulos necessarios
a entrada do escoamento na conduta, acautelando as condicoes de entrada no rotor. Para gerar a
a geometria da pa, utilizaram-se splines em seccoes pre-definidas ao longo da envergadura da pa,
escolhidas tendo em conta os angulos necessarios. A pa do estator resultante e apresentada na figura
2.5.
16

Figura 2.5: Perfis da pa diretriz para 7 seccoes e tabela com posicao e angulos para cada seccao [21]
Figura 2.6: Triangulo de velocidades caracterizando o escoamento medio
2.6 Projeto do Rotor
Para fazer esta analise e obter a geometria das pas, utilizaram-se os softwares ANSYS-TurboGrid
para gerar a malha e ANSYS-CFX/ANSYS-Fluent para correr a simulacao do escoamento nos VC.
No caso especıfico do rotor, procurou-se obter tres perfis alares para tres seccoes ao longo da
envergadura da pa, sendo as restantes seccoes obtidas por extrapolacao das calculadas. As tres
seccoes referidas sao junto ao cubo, junto ao bordo marginal e no raio medio. E neste ultimo ponto do
rotor, que se localiza o chamado perfil medio, que representa a seccao da pa onde a quantidade de
trabalho transferido do fluıdo para o rotor atinge o seu maximo. O raio medio e definido pelo valor de raio
que divide uma dada seccao de passagem do fluıdo em duas partes.
rmedio =
2
√r2max − r2min
2. (2.5)
Para alem de definir o raio medio, e tambem neste caso importante estabelecer o angulo medio αm que
tem em conta os angulos α1 e α2 a entrada e a saıda do rotor, respetivamente (figura 2.6). Estes dois
angulos e o angulo medio sao de extrema importancia para o calculo dos Coeficiente de Sustentacao
(CL) e Coeficiente de Resistencia (CD) abaixo apresentados.
17

Figura 2.7: Analise da velocidade de escoamento em torno das pas diretrizes (esquerda) e pas do rotor (direita) [20]
Vaxial = V1 sinα1 = V2 sinα2 = Vm sinαm, (2.6)
cotαm =1
2(cotα1 + cotα2), (2.7)
CL =Laero12ρV
2ml, (2.8)
CD =Daero12ρV
2ml. (2.9)
De toda a analise, resultam os perfis apresentados na Figura 2.7, onde surgem as pas diretrizes e as
pas do rotor com a respetiva analise de velocidade do escoamento para o raio medio.
2.7 Conduta de Saıda
2.7.1 Condicao Inicial
A conduta de saıda, ao contrario do que aconteceu com a conduta de entrada, nao tinha ainda
sido alvo de qualquer estudo aerodinamico ate ao inıcio desta dissertacao de mestrado, pelo que foi
necessario fazer esse estudo de raiz, antes do inıcio da construcao do prototipo da turbina. Para este
estudo, por uma questao de facilidade de adaptacao ao software, escolheu-se o programa Numeca
Fine/Turbo. Este software permite nao so a construcao da malha (atraves da extensao IGG) como
tambem a analise do escoamento e respetivo processamento (via extensao CFV).
Para o caso concreto da conduta de saıda, e de extrema importancia garantir que o escoamento a
saıda e totalmente radial, ou seja, a conduta deve transformar o escoamento axial que sai do rotor num
escoamento radial (efeito inverso ao que acontece na conduta de entrada). Para alem de transformar o
escoamento axial em radial, a conduta de saıda deve tambem desacelerar o fluıdo para que seja feita
alguma recuperacao de pressao, ou seja, pretende-se que o fluıdo que sai do rotor a velocidade muito
elevada e baixa pressao (pressao muito negativa) desacelere aumentando o valor da pressao (pressao
menos negativa).
Esta diminuicao de velocidade e aumento de pressao origina um gradiente de pressao muito adverso
18

Figura 2.8: Analise do modulo de velocidade ao longo da conduta inicial. Como se pode ver existe uma grandezona de separacao, representada pelas setas a azul
ao qual se tera de ter particular atencao, sendo este sem duvida o fator que limita o projeto da conduta
de saıda. Uma conduta com curvatura muito acentuada leva imediatamente a separacao do escoamento
ja que este, devido ao gradiente de pressao, nao tem capacidade para acompanhar a curvatura sem
separar. No caso de existir separacao, a eficiencia da conduta de saıda e muito afetada, pois a zona de
escoamento separado funciona como um tampao, que nao deixa o escoamento fluir em direcao a saıda
naquela zona da conduta, limitando o dempenho da conduta.
Chegados a este ponto em que sao conhecidas as necessidades e os constrangimentos do projeto e
necessario escolher um ponto de partida, ou seja, uma geometria inicial a partir da qual serao feitas
algumas otimizacoes ate que se obtenha uma conduta que satisfaca as necessidades [23]. Para esta
abordagem inicial, escolheu-se utilizar a conduta de entrada ja desenhada como conduta de saıda.
2.7.2 Condicoes de Entrada e Saıda
A conduta de entrada foi desenhada para transformar um escoamento radial (a entrada) num
escoamento axial (a saıda) acelerando-o. Assim, e facilmente compreensıvel que, se utilizarmos a
conduta no sentido inverso, ou seja, com um escoamento axial a entrada e um radial a saıda, esta
ira desacelerar o escoamento (ver Figura 2.8). Claro esta que esta desaceleracao e o gradiente de
pressao adverso a ela associado, conjuntamente com a elevada curvatura das paredes da conduta,
ira certamente levar a separacao do escoamento, mas, nesta fase, o mais importante e a definicao da
geometria de partida.
Escolhida a geometria inicial, e necessario estabelecer qual a malha a utilizar, o metodo de calculo e
tambem o metodo a utilizar para otimizar a configuracao inicial.
Quanto a primeira questao, optou-se por seguir exatamente a mesma metodologia de [21] onde sao
utilizados tres sectores de malha, um na conduta e dois nos prolongamentos da mesma para captar os
19

com maior exatidao e rigor fenomenos aerodinamicos dentro da conduta. Estas ultimas duas seccoes
nao tem o mesmo tamanho (comprimento neste caso) sendo o prolongamento a saıda cerca de tres
vezes maior, uma vez que e nesta zona que nao conhecemos o escoamento, ja que este resulta da
passagem do fluıdo na conduta em estudo (conhecemos todas as condicoes de entrada, uma vez que
este advem do escoamento a saıda do rotor ja estudado).
Tal como aconteceu na analise da conduta de entrada, a malha tem ainda em consideracao a relacao
y+ < 1, sendo a densidade de celulas junto a parede muito superior a densidade da malha no centro do
escoamento, onde e aproximadamente escoamento potencial. De referir que, das paredes para o centro
da conduta, a densidade de celulas da malha segue uma progressao geometrica.
Para a definicao das condicoes de entrada, importa considerar as caracterısticas do escoamento
a saıda do rotor. Neste caso, sabe-se que o escoamento proveniente do rotor nao e totalmente axial,
apresentando uma componente tangencial da velocidade cerca de dez vezes inferior a componente axial
[20].
No caso das condicoes de saıda, nao existem muitas caracterısticas do escoamento que sejam
conhecidas a priori, pois este escoamento resulta da passagem na conduta que se esta a estudar.
No entanto sabe-se que, sendo uma conduta de saıda para a atmosfera, a pressao a saıda sera
obrigatoriamente a pressao atmosferica.
2.7.3 Analise e Optimizacao
Definidos todos os parametros necessarios ao inıcio da analise, realizou-se a primeira simulacao a
conduta com a geometria preliminar referida. Os resultados estiveram totalmente dentro do esperado,
verificando-se uma separacao bastante grande do escoamento com uma desaceleracao do mesmo
(quanto maior a desaceleracao, mais acentuado sera o gradiente de pressao adverso). Esta separacao
ocorre, como seria de esperar, no involucro exterior (Shroud) onde a curvatura e mais acentuada.
Realizada a primeira analise e interpretados os resultados, seguiu-se a otimizacao da geometria.
Uma vez que existiam diversos prazos a cumprir e que o objetivo era o desenho, construcao, montagem
e ensaio do modelo em tempo util, optou-se por seguir uma metodologia de otimizacao celere, sendo
que, apesar de poder ocorrer alguma perda de precisao nos calculos, foram sempre asseguradas as
condicoes necessarias a obtencao de uma geometria que cumprisse todos os requisitos previamente
estabelecidos.
No caso concreto da conduta de saıda, optou-se por reaproveitar o perfil do hub da conduta de
entrada, a fim de diminuir o tempo de calculo/otimizacao e tambem reduzir os custos de producao do
modelo (a conduta, como apresentado mais a frente nesta dissertacao, e produzida atraves de moldes
de silicone pelo que, o reaproveitamento de formas/geometrias permite a utilizacao do mesmo molde
para varias pecas).
Foram entao feitas diversas simulacoes ate que se obteve a conduta final, resultante da otimizacao da
geometria inicialmente utilizada e utilizada para a geracao do desenho 3D da conduta. Esta e composta
pelo hub de entrada e uma Shroud otimizada, para garantir que nao existe separacao na conduta onde o
20

(a) (b)
Figura 2.9: (a) Conduta de Saıda Final (b) Conduta de Entrada. Pode ver-se a menor curvatura da conduta (a),devido a necessidade de evitar a separacao do escoamento
escoamento e desacelerado e transformado em radial. Em relacao a geometria inicialmente utilizada (a
conduta de entrada), destaca-se que a Shroud obtida apresenta uma curvatura muito menos acentuada
para permitir que, mesmo com um gradiente de pressao bastante adverso, o escoamento consiga
acompanhar a curvatura da parede.
Na figura 2.9 e apresentada conduta final, resultante do processo de otimizacao. Nesta conduta, o
escoamento e totalmente transformado em radial, sem separacao junto a parede da Shroud e com ligeira
desaceleracao de velocidade associada a uma subtil recuperacao de pressao (valores da recuperacao
de pressao serao apresentados no capıtulo seguinte).
2.8 Caracterısticas e Parametros chave do modelo
Nesta seccao, apresentam-se os dados e caracterısticas tecnicas do modelo da turbina. Entre estes
dados, estao os valores de velocidade de rotacao, potencia do modelo, triangulos de velocidade e valores
de pressao. Serao explicadas metodologias e processos de calculo com o objetivo de permitir um maior
conhecimento do funcionamento da turbina e das suas caracterısticas principais.
2.8.1 Dimensoes da turbina
A dimensao mais importante da turbina, por ser a que influencia todas as outras dimensoes, e o
diametro do rotor. Neste caso, definiu-se esta caracterıstica em funcao da potencia e velocidade de
rotacao que se pretendiam atingir, tendo-se concluıdo que um rotor com 0,5 m de diametro cumpria
todos os requisitos. Nesse sentido, estabeleceu-se tambem uma velocidade de rotacao maxima (Ωmax)
de 3000 rpm para uma potencia de 28 kW.
No que toca as restantes dimensoes da turbina, e importante ressalvar que o estudo aerodinamico
21

Tabela 2.2: Dimensoes gerais da turbina
Diametro Externo do Rotor [m] 0,5Diametro Interno do Rotor [m] 0,34
Area de passagem no rotor [m2] 0,1056Diametro do Estator [m] 0,95
Comprimento da Turbina [m] - s/gerador 1,2Altura da Turbina [m] 1,4
previamente apresentado apenas define a geometria dos varios componentes e nao as suas dimensoes
exatas, ou seja, a geometria resultante de todo o processo de analise e otimizacao pode ser adaptada a
dimensao pretendida. No caso desta dissertacao, essa adaptacao foi feita segundo um fator de escala
que relaciona o diametro do rotor de referencia para o estudo aerodinamico com o diametro pretendido
para o modelo. Sabendo que em [20, 21] se considerou um rotor de 1 m de diametro como referencia e
que temos um modelo com um rotor de diametro 0,5 m, fica claro que o fator de escala sera 0,5.
Na tabela 2.2 apresentam-se algumas dimensoes gerais do modelo da turbina.
2.8.2 Velocidades do escoamento ao longo da turbina
Estabelecidas as dimensoes do modelo, importa conhecer o escoamento que o atravessa. Para
definir esse escoamento e importante conhecer o ponto otimo de funcionamento do modelo e respetivas
caracterısticas, os triangulos de velocidade e a evolucao de pressao no escoamento ao longo da sua
passagem pelos varios pontos da turbina.
Do capıtulo anterior e de acordo com [21], ja se conhecem os triangulos de velocidade, pelo que
conhecendo a velocidade de rotacao e o diametro do rotor, e possıvel conhecer a velocidade de
transporte (U )
U = NR. (2.10)
Para alem de conhecer a velocidade de transporte (U ), recorrendo unicamente a relacoes trigonometricas
(ver equacoes 2.11 e 2.12), e possıvel conhecer as velocidades dos triangulos de velocidade, neste caso,
para o ponto otimo de funcionamento da turbina. Contudo, e necessario ressalvar que os triangulos
apresentados sao unica e exclusivamente validos para o ponto de rendimento maximo ou caudal otimo,
ja que para outros valores de caudal os triangulos sofrem alteracoes.
cos(α) =U
V2→ V2 =
U
cos(α), (2.11)
tan(α) =W2
U→W2 = tan(α)U. (2.12)
22

Figura 2.10: Triangulos de velocidade, angulos e velocidades para o modelo da turbina no ponto de caudal otimo
2.8.3 Evolucao da pressao no escoamento
Conhecidas as dimensoes da turbina e as velocidades do escoamento ao longo da mesma, e
possıvel estudar a evolucao da pressao do escoamento com o intuito de o compreender detalhadamente
e confrontar os valores ideais com os reais, ja que em cada ponto para o qual se faz estimativa, sera
instalado um sensor de pressao. Para alem disso, estes calculos facilitam tambem a selecao dos
sensores de pressao a instalar na turbina, dado que conhecemos a gama de pressoes que irao medir.
Neste caso, escolheram-se 8 pontos ao longo da turbina representativos do escoamento global,
entre os quais se aplicou a equacao de Bernoulli generalizada (apresentada na equacao 2.13, para dois
pontos 1 e 2 genericos)
∫∫∫V C
∂
∂t
(ρV 2
2
)dΨ +
∫∫SC
(p
ρ+V 2
2+ gy
)ρ(~V .~n) ds = Wveio − Qdiss. (2.13)
onde, Wveio representa o trabalho fornecido ao veio e Qdiss as perdas viscosas no fluıdo, desprezadas
neste calculo. Quanto ao trabalho fornecido ao veio, este apenas e considerado nas regioes junto ao
rotor, sendo que :
Wveio =Er
η. (2.14)
onde η representa o rendimento da turbina, assumido neste caso como sendo 80%.
Para que fosse possıvel aplicar esta equacao, teve de considerar-se a inexistencia de perdas ao
longo do escoamento, o que e bastante aceitavel em varios pontos, como na conduta de saıda, mas
pouco realista em seccoes junto ao rotor e estator, onde existirao sempre perdas. Neste sentido, para os
pontos onde a aproximacao e mais grosseira, o resultado apenas nos permite ter uma ideia global da
evolucao de pressao. Contudo, esta ideia e suficiente para projetar todo o sistema de controlo e medicao
de pressoes da turbina.
Este calculo iniciou-se no ponto 1, que representa a zona da atmosfera que, estando proxima de
entrada da turbina, esta suficientemente longe para nao sofrer influencia do escoamento que entra na
turbina. Assim, o ar esta parado e a pressao e a pressao atmosferica.
Aplicando a equacao de Bernoulli entre este ponto e o ponto 2, localizado a montante do estator,
23

considerando as pressoes relativas a hidrostatica local surge:
p2 = −1
2ρV 2
2 . (2.15)
Para conhecer a componente radial da velocidade no ponto 2, e possıvel recorrer ao caudal e a
sua definicao segundo a area de passagem que o respeita. Neste caso, uma vez que nao existem
componentes axiais ou tangenciais da velocidade, esta equacao permite conhecer o modulo da
velocidade neste ponto.
Q2 = A2V2r → V2 =Q
A2. (2.16)
A partir deste ponto e conhecendo a area no ponto 2, e facil obter o valor da pressao, de acordo com a
equacao 2.17(onde b representa a largura da conduta de diametro D).
V2 =Q
D2πb2→ p2 = −1
2ρ
(Q
D2πb2
)2
. (2.17)
O processo e sequencial, pelo que se aplica novamente a equacao de Bernoulli, entre o ponto
previamente calculado (no exemplo acima apresentado, o ponto 2) e o ponto seguinte.
O ponto 3 localiza-se a jusante do estator, pelo que a sua velocidade e composta pelas componentes
radial, uma vez que ainda nao foi iniciada a transformacao do escoamento de radial para axial, e
tangencial, devido a influencia das pas do estator no escoamento. O calculo da velocidade radial segue
a equacao 2.15 mas, pelo efeito previamente mencionado, torna-se crucial a aplicacao da equacao 2.17,
a fim de conhecer o modulo da velocidade neste ponto.
V3 =V3r
sinα3. (2.18)
A partir do momento em que se conhece a magnitude da velocidade no ponto 3, o calculo da pressao
neste local torna-se um processo repetitivo, que apenas depende da aplicacao das equacoes mencionadas.
E contudo importante ressalvar que, para as seccoes 5 e 6, localizadas na proximidade do rotor, o termo
realtivo ao trabalho fornecido ao veio deixa de ser desprezado .
Este processo e repetido para todos os 8 pontos da turbina, surgindo deste processo a figura 2.11.
Figura 2.11: Pressao ao longo da turbina
24

2.8.4 Conclusao
De todos os calculos previamente mencionados resulta a Tabela 2.3, onde se apresentam as
caracterısticas gerais da turbina para o ponto de caudal otimo. Atraves desta tabela podemos conhecer
qual o valor do caudal otimo (Q), qual a energia fornecida a maquina por esse caudal (Er) e qual a
potencia resultante (P ).
Tabela 2.3: Dados tecnicos do modelo da turbina
Ω 3000 rpmN 314 rad/sU 67,16 m/sEr -4510,41 m2/s2
Wm 6,2 kg/sQ 4,96 m3/sP 28 kW
Φprojeto 0,126 −
25
Capıtulo 3
Construcao do modelo 3D
3.1 Introducao
O estudo aerodinamico, previamente abordado, e de extrema importancia para o desenvolvimento
de qualquer modelo ou prototipo de turbina, uma vez que e atraves deste estudo que sao obtidas as
geometrias a implementar em elementos, como as condutas de entrada e saıda ou as pas do estator e
rotor. A partir do momento em que estas geometrias estao totalmente definidas, tendo-se garantido o
cumprimento dos requisitos estabelecidos, pode iniciar-se a fase de concecao da estrutura da turbina.
A etapa de projeto e desenvolvimento de componentes para a estrutura e influenciada, tanto pelas
conclusoes do estudo aerodinamico previamente realizado, como pelas dimensoes que possam estar ja
definidas desde o inıcio do projeto. No modelo atual, a unica medida que havia sido definida a priori
era o diametro total do rotor. Este facto, tornou possıvel a existencia de alguma flexibilidade na fase de
projeto, uma vez que as medidas foram sendo adaptadas a medida do que se pretendia, do espaco e
das condicoes disponıveis para montar, instalar e ensaiar a turbina.
Ao longo deste perıodo tiveram-se em conta a integridade e robustez da estrutura, o custo de
producao e manutencao da mesma, bem como o aspeto visual final do modelo. Esta ultima parte, e
sem duvida a menos interessante para a fase de prototipagem em que nos encontramos, mas, tendo
em conta o objetivo final do projeto de comercializar o dispositivo, este e um ponto que assume alguma
relevancia.
Nas seccoes que se seguem, indicam-se os calculos e os pressupostos que estiveram na base
do desenho 3D final. Este desenho recorreu ao software de CAD SolidWorks (incluindo as suas
funcionalidades de analise estrutural), bem como ao software de materiais CES, que ajudou particularmente
na selecao de materiais. Para alem do desenho final, apresentam-se tambem os resultados das analises
estruturais feitas em alguns elementos da turbina, sobretudo no que respeita a estrutura de suporte.
26

(a) (b)
Figura 3.1: Na figura 3.1a apresenta-se a configuracao de turbina com um difusor comum para as duas zonas e umgerador entre as 2 zonas. No caso da figura 3.1b, sao utilizadas duas unidades geradoras e dois difusores, um paracada zona [19].
3.2 Requisitos do Projeto
Inicialmente e de acordo com as figuras 3.1a e 3.1b presentes em [19], existiam varias configuracoes
possıveis para a turbina, com especial enfase na localizacao da unidade geradora e tambem no tipo de
difusores de entrada e saıda a instalar.
Em primeiro lugar, no que respeita as configuracoes apresentadas, e importante salientar que, em
comparacao com as configuracoes com 2 geradores, qualquer sistema de 1 gerador unico e preferıvel
por ser menos dispendioso, menos complexo (sao necessarios menos acoplamentos) e mais fiavel.
No caso concreto do modelo em construcao, optou-se por uma configuracao alternativa a todas as
apresentadas em [19], por se considerar que nenhuma das versoes apresentadas era suficientemente
compacta, para reduzir ao maximo os custos de producao e manutencao, bem como conferir a estrutura
um aspeto apelativo. A configuracao utilizada recorre a uma unica unidade geradora que, ao inves de
estar posicionada entre as duas zonas da turbina, esta instalada num dos extremos da estrutura,
sendo que as duas zonas estao encostadas uma a outra e nao separadas como se sugeria no
documento. Esta particularidade, permite reduzir significativamente o comprimento da estrutura e
facilitando significativamente a montagem da estrutura, que pode assim adotar um procedimento
sequencial.
Quanto a questao dos difusores a utilizar, foi necessario um estudo das varias hipoteses possıveis,
pelo que este processo de selecao foi bastante mais complexo e demorado do que a decisao quanto a
configuracao espacial da turbina. Um dos principais fatores tido em conta para a escolha dos difusores,
foi o caudal da turbina que assume, para os calculos e velocidades considerados, um valor relativamente
elevado. Por essa razao, seria sempre muito complexa a utilizacao de difusores tipo voluta com
bocais circulares, uma vez que, para admitir/escoar um caudal como o considerado, seria necessario
um diametro de bocal muito elevado, facto que torna esta hipotese praticamente incomportavel. Por
essa razao, optou-se pela utilizacao de difusores tıpicos de ventilador, com um bocal retangular o
que, comparado com uma voluta tıpica em caracol, permite aumentar consideravelmente o caudal
escoado/admitido atraves do bocal.
27

Figura 3.2: Localizacao das Valvulas na estrutura da turbina
Para alem da escolha da escolha das volutas e disposicao da turbina, existe ainda a necessidade de
ser definida a posicao das valvulas. Esta questao assume uma importancia extrema, dada a pretensao
inicial de assegurar custos de manutencao da turbina reduzidos. Isto porque, sendo as valvulas uma das
partes moveis da turbina, e expectavel que estes componentes necessitem de cuidados de manutencao
adicionais ou ate eventual substituicao. Assim, o acesso facil a zona das valvulas foi algo tido em conta
no projeto da turbina, optando-se pela colocacao das valvulas nos extremos da estrutura, ou seja, o
sistema final tera uma valvula junto a conduta de entrada da zona A e outra valvula junto a conduta de
saıda da zona B, como visıvel pela Figura 3.2.
Pela analise da figura, e possıvel notar que a corrente localizacao das valvulas, implica que a
distancia/canal que estas percorrem varia de uma valvula para a outra, facto que tera de ser considerado
aquando da programacao do sistema de controlo destes dispositivos.
Para alem disso, dado que uma valvula esta a entrada do escoamento e outra a saıda, tambem as
forcas exercidas sobre cada uma das valvulas sao diferentes.
Para alem disso, existe ainda outro fator a ter em consideracao. Considerando uma valvula
parcialmente fechada, o escoamento ao passar na regiao ainda aberta acelera, devido a menor area de
passagem, provocando uma depressao que forca a valvula no sentido do fecho total. Ao contrario, quando
a valvula esta fechada, uma vez que existe sempre uma area de passagem mınima, o escoamento ira
forcar a valvula no sentido da abertura.
Esta questao e alias muito mais complexa que o facto de os canais terem diferentes comprimentos.
Ao inves do que acontece no primeiro caso, esta particularidade nao e resoluvel unicamente atraves da
programacao, sendo necessario assegurar que os atuadores utilizados tem capacidade para travar a
valvula numa determinada posicao e vencer a forca do escoamento.
Garantido o conhecimento de todos os requisitos respeitantes ao sistema de valvulas, existiu ainda
28

Figura 3.3: Vista em alcado da configuracao final do modelo da turbina
a necessidade de estudar e definir a estrutura de suporte da turbina e respetivo gerador. Neste caso,
o maior desafio era garantir que a estrutura suportava todo o peso da turbina e gerador, com baixas
vibracoes e pequenas deformacoes, durante a operacao do sistema. Dado que existiu, desde inıcio,
um plano para ensaiar este equipamento fora das instalacoes do IST, foi tambem necessario acautelar
possibilidade de instalacao de rodızios na estrutura de suporte, a fim de facilitar o transporte da turbina.
Atendidas todas estas questoes, e importante salientar que a estrutura, sobretudo durante os testes
na central de energia do Mutriku, estara exposta a um ambiente marıtimo agressivo, com uma muito
elevada capacidade para oxidar estruturas em aco carbono, como a desta turbina. Por esta razao, todos
os elementos fabricados em aco carbono sao sujeitos a tratamentos de superfıcie de anti corrosao, como
a zincagem ou a metalizacao. Qualquer um destes tratamentos e menos robusto que a galvanizacao a
quente. Contudo, devido a pequena espessura das chapas utilizadas, a escolha deste ultimo metodo
acarretava um muito elevado risco de empenamento das chapas, provocado pelas elevadas temperaturas
utilizadas neste processo.
Para alem dos tratamentos referidos, utilizou-se ainda um revestimento sintetico para reforcar a
protecao das chapas contra o meio agressivo a que estarao submetidas.
3.3 Modelo 3D Final
Tendo em conta os requisitos supramencionados, apresenta-se na figura 3.3 a configuracao final
do prototipo da turbina. Mais uma vez, ressalva-se que esta e a configuracao mais compacta e que
apresenta, a partida, menores custos de producao e manutencao.
Na figura e tambem possıvel vislumbrar a estrutura de suporte da turbina.
Nas subseccoes seguintes sao detalhados os pormenores do projeto de algumas partes da estrutura
final da turbina.
29

Figura 3.4: Chassis do modelo
3.3.1 Chassis de suporte
Primeiramente, para facilitar a posterior compreensao relativa ao comportamento do chassis quando
esta sujeito a carga, explica-se detalhadamente a composicao deste elemento.
Uma vez que a turbina e o respetivo gerador tem um peso combinado de mais de uma tonelada, fica
claro que a estrutura de suporte teria de ser muito robusta para, por um lado suster o peso e as vibracoes
provenientes do funcionamento da turbina e, por outro garantir a integridade de toda a estrutura durante
o transporte entre locais de teste.
Nesse sentido, pensou-se na utilizacao de uma estrutura com duas partes a que se chamou de
”malhas”. Estas duas malhas complementam-se tendo cada uma finalidades diferentes. Na figura 3.4,
apresenta-se, desde ja o resultado final, quanto a estrutura de suporte.
3.3.1.1 Malha Superior do Chassis
Esta parte da estrutura, ilustrada na figura 3.5, e composta por perfis normalizados UPN 80 e duas
cantoneiras de abas iguais. Os principais objetivos deste elemento sao, em simultaneo, providenciar
suporte para a estrutura e facilitar o processo de montagem, atraves da propria disposicao das barras e
tambem das barras instaladas da vertical.
Uma vez que a montagem da estrutura e feita integralmente no IST e que, ao total, a turbina tera mais
de 200 pecas, e importante garantir que existem alguns elementos facilitadores durante este processo e
que garantam tambem, que nao existe espaco para enganos quanto as pecas que vao para cada local.
Foi sobretudo devido a essa necessidade que surgiu esta malha superior. As barras horizontais
estao dispostas, como se pode ver pela figura 3.3, de modo a que as chapas assentem diretamente na
estrutura.
30

Figura 3.5: Malha Superior do Chassis
Por seu lado, as barras dispostas na vertical sao cruciais durante o processo de montagem, ja que
permitem que as chapas da turbina sejam fixas a estrutura a medida que vao sendo necessarias para a
montagem. Para alem disso, garantem tambem o correto espacamento entre os varios elementos. Acima
destes dois efeitos, estas barras contribuem tambem para facilitar o alinhamento dos varios elementos,
sendo esse, sem qualquer duvida, o maior desafio durante a montagem.
Uma vez que, durante a fase inicial de ensaios no IST, sera necessario instalar um medidor de binario
que, estando entre o gerador e a turbina, afasta o gerador da turbina, o gerador estara em duas posicoes
diferentes durante os ensaios, uma com e outra sem medidor de binario. Por essa razao, instalou-se
as cantoneiras para facilitar o deslizamento e marcacao de posicao da unidade geradora durante os
ensaios.
Numa situacao limite e para baixos coeficientes de seguranca, seria possıvel suportar o peso da
turbina e seus perifericos, unicamente atraves desta malha. Contudo, uma vez que se utilizou um elevado
fator de seguranca, concebeu-se uma malha inferior que completara o chassis.
3.3.1.2 Malha Inferior do Chassis
Esta parte do chassis, agregada a malha superior, permite garantir muito baixas deformacoes e
vibracoes para quaisquer condicoes de funcionamento da turbina. Para alem disso, este componente
permite tambem a estrutura ganhar um pouco de altura, o que sera muito importante para a montagem
do difusor no pleno do laboratorio do IST.
A malha inferior, apresentada na figura 3.6, e composta, unica e exclusivamente, por barras
quadrangulares normalizadas com 2.5 mm de espessura e funciona como que um esticador da malha
superior, nao permitindo que esta de deforme sobre si propria.
Tal como referido anteriormente, a grande razao para a existencia deste elemento, prende-se com a
utilizacao de um coeficiente de seguranca elevado que leva ao sobredimensionamento propositado da
31

Figura 3.6: Malha Inferior do Chassis
estrutura.
Devido a necessidade de transportar a turbina, foi necessario incluir no chassis pes que por um lado
permitam o assentar a turbina no chao, com poucas vibracoes durante a operacao do modelo, e por
outro permitam a inclusao de rodızios para transporte. Por estas razoes, os pes tem 4 furos, para que
se possa aparafusar a turbina ao chao, tendo ainda uma furacao feita para a instalacao de rodızios na
turbina.
Uma vez que o peso da estrutura e bastante elevado, conceberam-se 6 pontos de apoio preparados
para levar um total de entre 4 a 6 rodızios, consoante a necessidade. Os rodızios terao de suportar uma
carga de 250kg cada e deverao ter funcao de travao. Para alem disso, uma vez que os pisos por onde o
prototipo se movimentara nao sao regulares, selecionaram-se rodızios com rodas de borracha insufladas
que permitam uma movimentacao mais suave.
3.3.1.3 Analise estrutural do Chassis
Dado o peso da estrutura, a concecao da estrutura obriga a um estudo detalhado do comportamento
da mesma, quando sujeito a esta carga. Este estudo recorreu a simulacoes numericas realizadas atraves
do software SolidWorks, que ja havia sido utilizado para elaborar todo o modelo em 3D. Resultante destas
simulacoes, e possıvel assegurar que, sujeita a toda a carga e considerando a turbina em funcionamento,
a estrutura deforma apenas 1.15 mm, o que e perfeitamente desprezavel.
Na figura 3.7, podemos ver as deslocacoes resultantes da estrutura, para uma carga de 150% do
peso total, ou seja, incluindo um fator de seguranca de 50% para o peso da estrutura completa. Este
fator e bastante elevado e leva a um sobredimensionamento da estrutura de suporte, com o objetivo de
prevenir quaisquer eventualidades durante a operacao da turbina, garantindo que, em qualquer situacao
possıvel, os deslocamentos da estrutura sao mınimos.
Esta estrutura da todas as garantias quanto aos requisitos de baixas deformacoes e vibracoes.
Contudo, durante os ensaios esta prevista a utilizacao de pecas de borracha entre a estrutura e o chao,
a fim de reduzir ainda mais as vibracoes.
32

Figura 3.7: Simulacao do comportamento da estrutura de suporte/chassis para uma carga de 1,5 vezes o pesototal da estrutura e seus peirfericos
A figura 3.7 respeita a uma iteracao anterior a estrutura final apresentada nas seccoes de montagem
e ensaios, no entanto as alteracoes feitas provocam alteracoes insignificantes na estrutura.
3.3.2 Modelo e seus componentes
Como previamente abordado, optou-se por utilizar uma configuracao muito compacta para a turbina,
com o intuito de facilitar o seu transporte, diminuir os custos de producao e manutencao e ainda conseguir
uma turbina com um aspeto o mais apelativo possıvel. Todos estes relacionam-se nao so com a atual
fase de prototipagem, mas tambem com a possıvel fase comercial que se pretende atingir.
A estrutura final do modelo e, na sua grande maioria, composta por chapas de aco que serao
montadas numa estrutura tipo ”sanduiche”. As varias chapas sao ligadas por varoes roscados, que
atravessam toda a estrutura, fixos por porcas com a ajuda de tubos espacadores, que garantem o
correto espacamento entre as varias chapas. Por esta razao, apos a montagem de todos os elementos,
a estrutura fica extremamente rıgida e integra, o que aumenta a sua fiabilidade.
Para alem disso, este tipo de estrutura permite a utilizacao de uma unidade geradora ligada a um
unico veio, o que diminui substancialmente os custos de producao, uma vez que, nao so este tipo de
geradores e mais barato do que unidades com duas pontas de veio, como apenas existe a necessidade
de ter um unico veio, ao contrario das configuracoes sugeridas em [19], que requerem todas elas dois
veios.
Este modelo facilita tambem a manutencao e ate a propria instalacao do sistema de valvulas. Os
primeiros ensaios a turbina serao feitos sem a presenca das valvulas, o que poderia obrigar a desmontar
parte da turbina para, a seguir a esses ensaios, instalar o sistema de valvulas. No entanto, a configuracao
seguida, permite instalar as valvulas sem desmontar qualquer peca, em qualquer momento que se
pretenda.
Quanto as pas do estator, estas podem ser vistoriadas facilmente com a turbina em funcionamento e
a sua substituicao e muito facil, bastando retirar a pa a substituir das ranhuras e colocar a pa substituta
nas mesmas.
E por isso um modelo que com elevada rigidez e fiabilidade e que facilita a manutencao/substituicao
33

Figura 3.8: CAD do modelo da turbina, na sua configuracao final
e instalacao de pecas. Contudo, o facto de a estrutura ser extremamente compacta acarreta algumas
desvantagens. Entre esses pontos menos positivos, esta a fraca visibilidade para o interior da turbina, o
que assume especial relevancia durante os ensaios, em que o conhecimento que se tem do funcionamento
da turbina e bastante reduzido. Para resolver este problema, poder-se-iam instalar algumas janelas de
acrılico, que permitissem ter alguma visibilidade para o interior do dispositivo.
Outro aspeto que, embora nao encerre em si um fator negativo, obriga a cuidados redobrados, e o
alinhamento de todos os elementos constituintes do modelo. Uma vez que esta turbina e construıda
sobre 8 varoes, que atravessam toda a estrutura, e extremamente importante garantir que os furos
de posicionamento dos varios elementos, estao certos entre si. E importante notar que, para esta
estrutura, os desalinhamentos se vao somando, ou seja, um desalinhamento de 1mm numa chapa e
outro desalinhamento de 2mm na chapa seguinte, implica que a chapa posterior a estas duas, sofrera
um desalinhamento de 3mm. Por esta razao, este e sem duvida o fator crıtico durante toda a concecao e
montagem do modelo.
Este ultimo aspeto nao e totalmente controlavel pelo IST, uma vez que 80% dos componentes da
turbina sao fabricados externamente, pelo que resta implementar um controlo de qualidade o mais
apertado possıvel.
Na figura 3.8, apresenta-se uma vista do CAD respeitante a configuracao final do modelo.
3.3.2.1 Materiais Utilizados
Um dos principais materiais empregados na construcao deste modelo, e o aco carbono S235 zincado
ou metalizado, utilizado em todas chapas da estrutura. Para obter a forma final desejada, utilizaram-se
processos de corte por jato de agua e, em casos pontuais, laser.
Para estruturas dimensionalmente complexas como as pas, tanto do rotor como do estator, ou
34
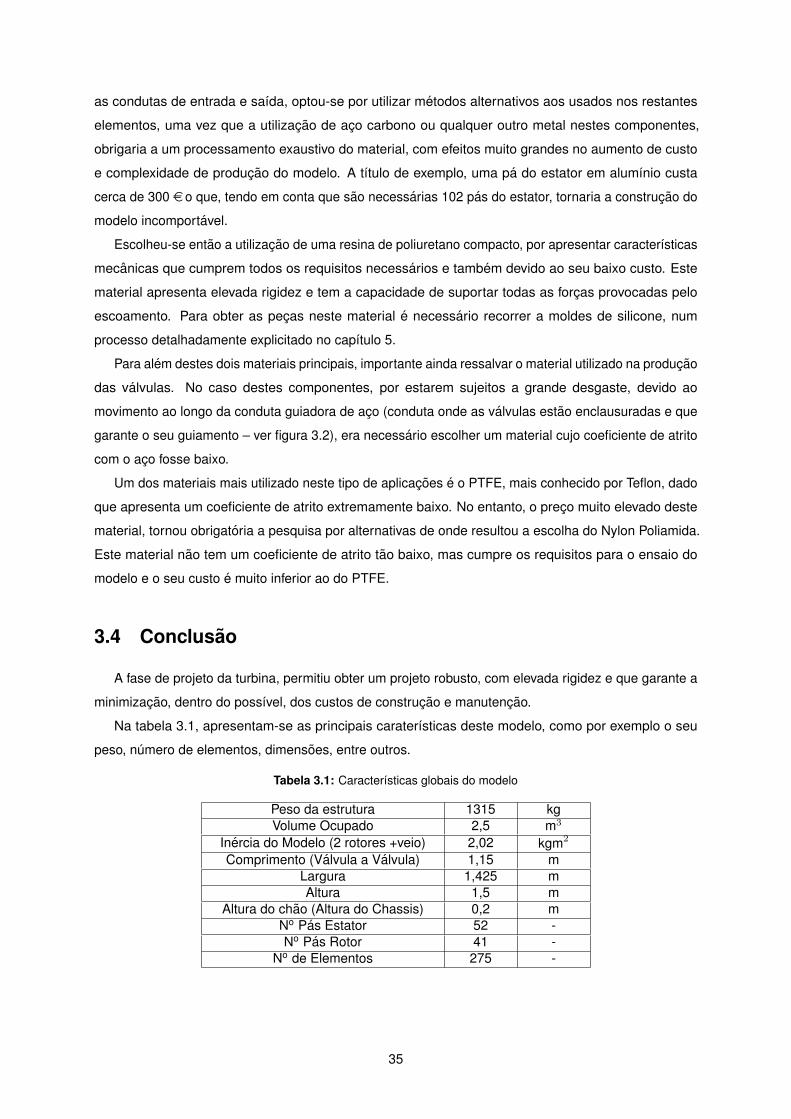
as condutas de entrada e saıda, optou-se por utilizar metodos alternativos aos usados nos restantes
elementos, uma vez que a utilizacao de aco carbono ou qualquer outro metal nestes componentes,
obrigaria a um processamento exaustivo do material, com efeitos muito grandes no aumento de custo
e complexidade de producao do modelo. A tıtulo de exemplo, uma pa do estator em alumınio custa
cerca de 300 e o que, tendo em conta que sao necessarias 102 pas do estator, tornaria a construcao do
modelo incomportavel.
Escolheu-se entao a utilizacao de uma resina de poliuretano compacto, por apresentar caracterısticas
mecanicas que cumprem todos os requisitos necessarios e tambem devido ao seu baixo custo. Este
material apresenta elevada rigidez e tem a capacidade de suportar todas as forcas provocadas pelo
escoamento. Para obter as pecas neste material e necessario recorrer a moldes de silicone, num
processo detalhadamente explicitado no capıtulo 5.
Para alem destes dois materiais principais, importante ainda ressalvar o material utilizado na producao
das valvulas. No caso destes componentes, por estarem sujeitos a grande desgaste, devido ao
movimento ao longo da conduta guiadora de aco (conduta onde as valvulas estao enclausuradas e que
garante o seu guiamento – ver figura 3.2), era necessario escolher um material cujo coeficiente de atrito
com o aco fosse baixo.
Um dos materiais mais utilizado neste tipo de aplicacoes e o PTFE, mais conhecido por Teflon, dado
que apresenta um coeficiente de atrito extremamente baixo. No entanto, o preco muito elevado deste
material, tornou obrigatoria a pesquisa por alternativas de onde resultou a escolha do Nylon Poliamida.
Este material nao tem um coeficiente de atrito tao baixo, mas cumpre os requisitos para o ensaio do
modelo e o seu custo e muito inferior ao do PTFE.
3.4 Conclusao
A fase de projeto da turbina, permitiu obter um projeto robusto, com elevada rigidez e que garante a
minimizacao, dentro do possıvel, dos custos de construcao e manutencao.
Na tabela 3.1, apresentam-se as principais caraterısticas deste modelo, como por exemplo o seu
peso, numero de elementos, dimensoes, entre outros.
Tabela 3.1: Caracterısticas globais do modelo
Peso da estrutura 1315 kgVolume Ocupado 2,5 m3
Inercia do Modelo (2 rotores +veio) 2,02 kgm2
Comprimento (Valvula a Valvula) 1,15 mLargura 1,425 mAltura 1,5 m
Altura do chao (Altura do Chassis) 0,2 mNo Pas Estator 52 -No Pas Rotor 41 -
No de Elementos 275 -
35

Capıtulo 4
Controlo da Turbina
4.1 Introducao
Tal como discutido previamente, os estados marıtimos sao altamente variaveis no tempo, fazendo
com que a energia armazenada nas ondas tambem o seja. Este facto torna especialmente complexo o
processo de concecao de sistemas mecanicos eficientes, que tenham capacidade para aproveitar ao
maximo a energia disponıvel.
Para conseguir a maximizacao da quantidade e qualidade da energia absorvida, e tao importante
garantir um bom desempenho da turbina como utilizar esquemas de controlo eficientes que permitam a
adaptacao do sistema ao estado marıtimo que se verifica num dado momento. Se a primeira parte do
desafio depende de um bom estudo estrutural e aerodinamico que permita garantir as propriedades do
escoamento pretendidas, a segunda parte pode ser feita de diversos modos tal como apresentado em
[27–29].
O controlo do sistema pode abranger o controlo da estrutura onde a turbina esta montada [30, 31],
neste caso uma boia, ou a propria turbina. Dado que nesta dissertacao nao foi utilizada qualquer boia ou
sistema flutuante, abordaremos doravante unica e exclusivamente o controlo sobre a turbina. Dentro
deste tipo de controlo existem algumas variaveis, todas elas baseadas em controlo por realimentacao
(feedback), entre as quais se destacam o controlo da velocidade de rotacao e o controlo do binario
eletromagnetico.
Em ambas as estrategias referidas, sao utilizadas valvulas como meio de atuacao do sistema de
controlo. A valvulas fecham e abrem total ou parcialmente variando o caudal que atravessa turbina, o
que provoca variacoes de velocidade de rotacao e potencia extraıda. Em muitos casos, estas valvulas
sao chamadas High Speed-Safety Valve (HSSV) por serem de atuacao rapida.
4.1.1 Controlo do binario eletromagnetico
De acordo com [8] e [13] e possıvel estabelecer uma ligacao entre a rotacao verificada no interior da
turbina e a coluna de agua, dado que a altura da coluna e a sua variacao e que forca o ar a atravessar a
turbina (esta influencia faz-se notar ainda mais em sistemas oscilantes).
36

Na base desta estrategia de controlo esta o balanco de quantidade de movimento:
Taero − Tmec − Tatrito = IdΩ(t)
dt. (4.1)
da qual,considerando o binario de atrito (Tatrito) desprezavel e uma condicao ideal de inercia nula, e
possıvel concluir que o binario mecanico e igual ao binario aerodinamico (Taero = Tmec).
Sabendo que a potencia eletrica do gerador e definida por:
Pgen = ηeTmecΩ(t). (4.2)
Conhecendo esta relacao e considerando um rendimento eletrico unitario (ηe = 1), e possıvel concluir
que:
Pgen = ηeTmecΩ(t) = TmecΩ(t) = TaeroΩ(t) = Paero. (4.3)
Do resultado de 4.3 e da definicao de coeficiente de potencia (equacao 4.4), pode chegar-se a equacao
da lei de controlo onde se pode ver que, para fazer o controlo do binario da turbina, se tem unicamente
de escolher o coeficiente Π, por forma a maximizar o rendimento medio da turbina, ja que os valores de
massa volumica do ar (ρ) e diametro (D) nao variam, ou seja, o controlo do binario eletromagnetico e
feito atraves da leitura instantanea da velocidade de rotacao da turbina. Para alem disso, prova-se, no
caso desta turbina, que esta lei de controlo e pouco dependente dos estados do mar.
Π =Paero
ρΩ(t)D5→ Pgen = ΠρD5Ω3. (4.4)
A equacao 4.4 e muitas vezes transformada em:
Pgen = aΩb. (4.5)
devendo o valor do coeficiente b ser 3 para casos onde apenas seja considerado o rendimento da turbina
e um pouco superior nas situacoes em que e tida em linha de conta a hidrodinamica do dispositivo.
Para determinar o valor dos coeficientes da equacao 4.5 e necessario, primeiramente, conhecer
aprofundadamente a ligacao entre a velocidade de rotacao da turbina e a potencia extraıda. Para isso, o
primeiro procedimento e a obtencao de varios valores de potencia absorvida e correspondente velocidade
de rotacao (Pgen,Ω(t)), fazendo-se a partir desses pontos um grafico semelhante ao apresentado na
figura 4.1 (exemplo ilustrativo).
Estabelecida a relacao presente na figura, pode iniciar-se a fase de projeto do sistema de controlo da
turbina. Os coeficientes decorrentes da relacao previamente obtida (a e b) permitirao controlar a turbina
entre a velocidade nula (Ω = 0) e um valor de velocidade (Ωthrt2). Ao ser atingida essa velocidade, a
potencia do gerador e limitada a um valor (P ratedgen ). No momento em que e atingida a sua velocidade de
rotacao maxima (Ωmax) a valvula e totalmente fechada (HSSV=0) e o escoamento e impedido de entrar
na turbina, dando inıcio aquilo que comumente se chama de ciclo de histerese. Este ciclo tem este nome,
37

Figura 4.1: Media Temporal da potencia extraıda pela turbina em funcao da velocidade de rotacao (grafico log-log)[13]
Figura 4.2: Diagrama de controlo da turbina atraves da velocidade de rotacao [13]
uma vez que o sistema ao diminuir a velocidade e a potencia segue o mesmo comportamento que havia
seguido aquando da aceleracao. A valvula so e reaberta quando se atinge um valor pre-definido (Ωthrt1),
permitindo de novo a entrada de caudal na turbina.
4.2 Peak Shaving
Como ja previamente abordado neste documento, os estados do mar apresentam enormes variacoes
ao longo do tempo. Esta variabilidade e observavel segundo as mais diferentes escalas (desde
diariamente ate anualmente). No entanto, a escala anual e aquela que permite, mais facilmente,
a visualizacao destas variacoes. Como seria de esperar, obtem-se potencias disponıveis muito maiores
no inverno, quando o mar esta predominantemente agitado, do que no verao, quando o mar esta,
tendencialmente, mais calmo. Esta variacao anual e a analisada em [32], de onde foi retirada a figura
4.3, ilustrativa deste fenomeno.
38
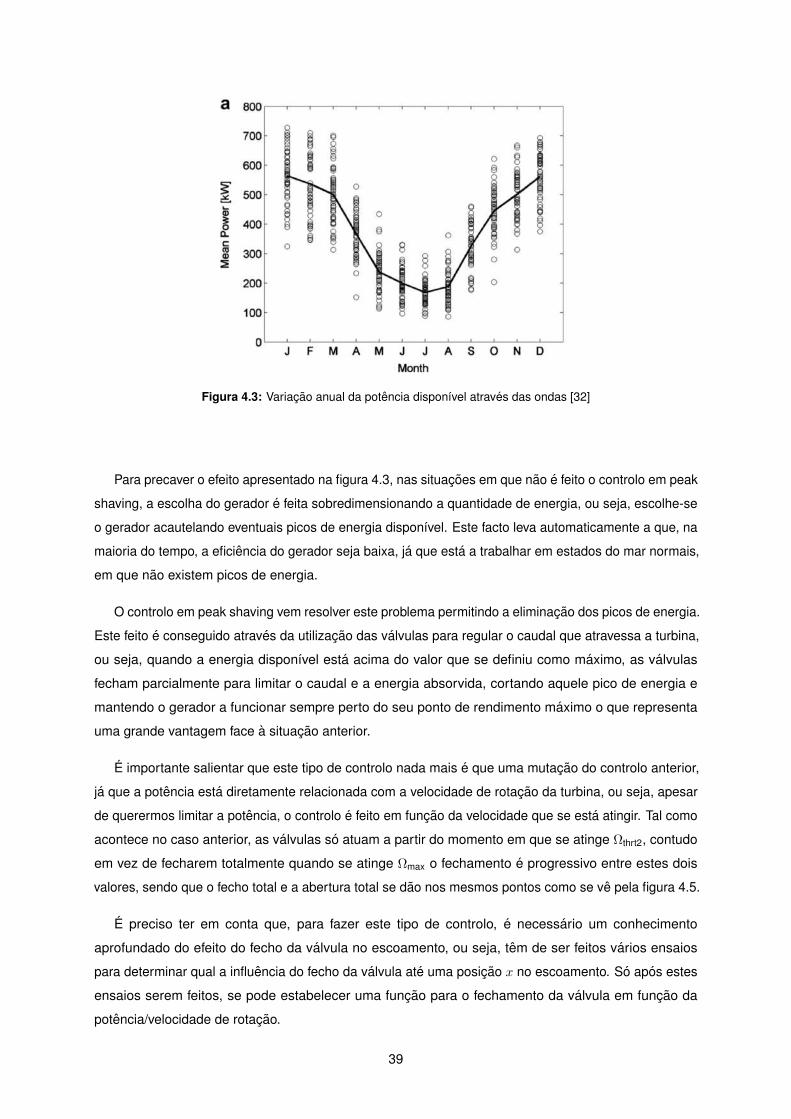
Figura 4.3: Variacao anual da potencia disponıvel atraves das ondas [32]
Para precaver o efeito apresentado na figura 4.3, nas situacoes em que nao e feito o controlo em peak
shaving, a escolha do gerador e feita sobredimensionando a quantidade de energia, ou seja, escolhe-se
o gerador acautelando eventuais picos de energia disponıvel. Este facto leva automaticamente a que, na
maioria do tempo, a eficiencia do gerador seja baixa, ja que esta a trabalhar em estados do mar normais,
em que nao existem picos de energia.
O controlo em peak shaving vem resolver este problema permitindo a eliminacao dos picos de energia.
Este feito e conseguido atraves da utilizacao das valvulas para regular o caudal que atravessa a turbina,
ou seja, quando a energia disponıvel esta acima do valor que se definiu como maximo, as valvulas
fecham parcialmente para limitar o caudal e a energia absorvida, cortando aquele pico de energia e
mantendo o gerador a funcionar sempre perto do seu ponto de rendimento maximo o que representa
uma grande vantagem face a situacao anterior.
E importante salientar que este tipo de controlo nada mais e que uma mutacao do controlo anterior,
ja que a potencia esta diretamente relacionada com a velocidade de rotacao da turbina, ou seja, apesar
de querermos limitar a potencia, o controlo e feito em funcao da velocidade que se esta atingir. Tal como
acontece no caso anterior, as valvulas so atuam a partir do momento em que se atinge Ωthrt2, contudo
em vez de fecharem totalmente quando se atinge Ωmax o fechamento e progressivo entre estes dois
valores, sendo que o fecho total e a abertura total se dao nos mesmos pontos como se ve pela figura 4.5.
E preciso ter em conta que, para fazer este tipo de controlo, e necessario um conhecimento
aprofundado do efeito do fecho da valvula no escoamento, ou seja, tem de ser feitos varios ensaios
para determinar qual a influencia do fecho da valvula ate uma posicao x no escoamento. So apos estes
ensaios serem feitos, se pode estabelecer uma funcao para o fechamento da valvula em funcao da
potencia/velocidade de rotacao.
39
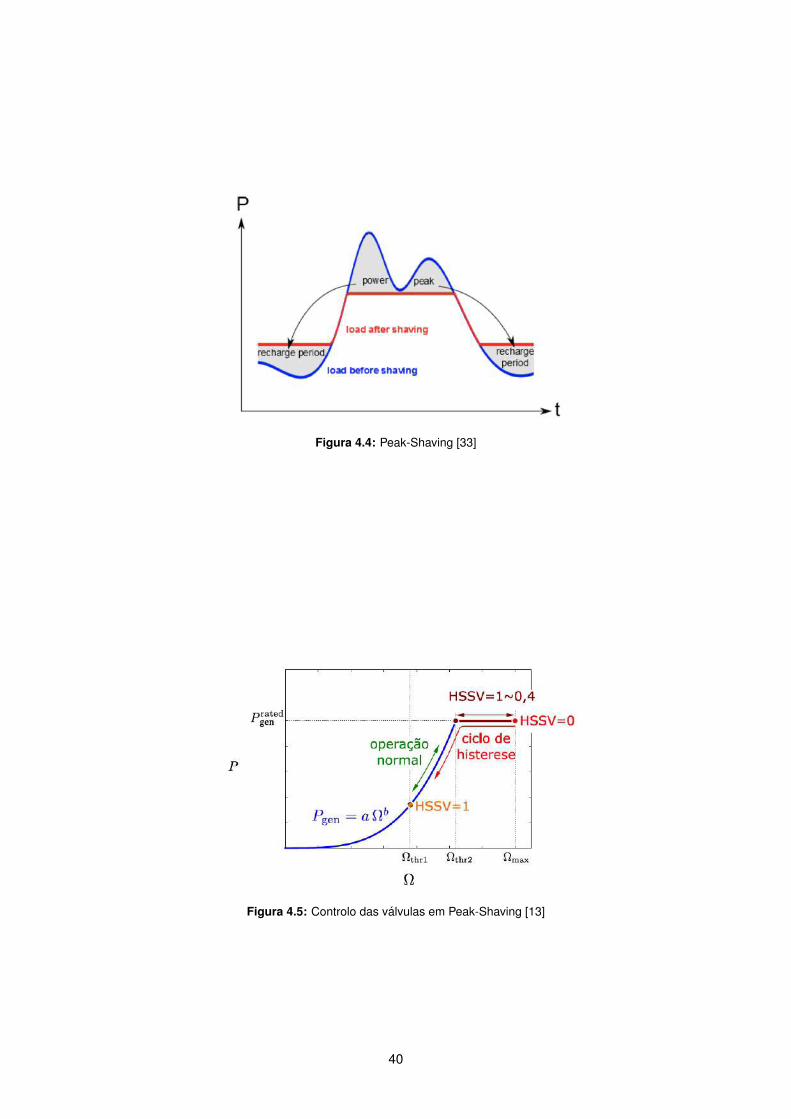
Figura 4.4: Peak-Shaving [33]
Figura 4.5: Controlo das valvulas em Peak-Shaving [13]
40

4.3 Sistema de Controlo da Turbina
Tal como previamente referido, todas as turbinas sao controladas sempre com o objetivo de assegurar
um bom rendimento de funcionamento, podendo para isso utilizar-se diferentes estrategias de controlo.
Neste caso, optou-se por recorrer a um esquema de controlo com recurso a duas valvulas que
interagem separadamente com cada uma das zonas/metades da turbina, ou seja, uma valvula atua
numa zona e a outra valvula noutra zona sem que exista uma dependencia entre elas. Com este sistema
de valvulas e possıvel, com a devida programacao, realizar peak-shaving.
Uma vez que se pretende, num futuro proximo, operar a turbina remotamente sem qualquer supervisor
no local, o sistema de controlo devera ser assegurado por um sistema robusto com recurso a automatos
que, ao contrario dos computadores, nao tem um risco consideravel de bloquear e deixar o sistema sem
qualquer controlo. Por esta razao, subdividiu-se o sistema de controlo em dois sistemas sinergeticos. O
primeiro destes, e integralmente projetado no IST e sera o responsavel por receber a informacao vinda
de todos os sensores instalados no modelo. O segundo sera projetado pelo IST em coordenacao com
uma empresa de automacao industrial e o resultado sera um sistema robusto, com automatos industriais
e que sera responsavel por tratar a informacao enviada pelo sistema do IST e tomar as decisoes de
acordo com o pre-estabelecido.
4.3.1 Sistema de Controlo do IST
O esquema de controlo desenhado no IST permite a visualizacao das variaveis medidas atraves
de uma interface visual via MATLAB/Simulink e tambem fornece imagens do funcionamento da turbina,
obtidas atraves de webcams, o que permite alcancar o objetivo de controlar a turbina remotamente.
Assim, este sistema sera o responsavel pela monitorizacao das variaveis medidas, tratamento dos
resultados obtidos e fornecimento de instrucoes para atuacao das valvulas ao automato que fara a
transmissao dessas ordens aos atuadores das valvulas.
Em primeiro lugar, e necessario ter uma rede de sensores instalada na turbina que permita a obtencao
de todos os valores necessarios, para que seja possıvel a rotina de controlo calcular qual a posicao das
valvulas, para um determinado instante. Esta rede de sensores e composta por diferentes equipamentos,
que deverao medir, em varios pontos, as grandezas abaixo enumeradas.
• Pressao Estatica (pstatic)
• Pressao Atmosferica (patm)
• Pressao de Estagnacao (pstag)
• Humidade (Humidity)
• Velocidade de Rotacao (Ω)
• Binario(T)
41

Figura 4.6: Diagrama Geral do sistema de controlo do IST. O bloco ”SISTEMA EXTRA-IST”, representa o sistemade automacao projetado no IST mas construıdo por uma entidade externa especializada
Todos os sensores estao ligados a uma placa de aquisicao de dados (DAQ), que recebe os valores lidos
e fornece esses dados ao software de controlo para que este possa gerar as instrucoes a dar as valvulas.
Estas ordens sao passadas tambem atraves da placa DAQ para o automato, que faz posteriormente o
contacto com os atuadores das valvulas. E importante ressalvar que, durante a fase de ensaios sem o
sistema de valvulas, este sistema sera responsavel por fornecer os dados do funcionamento da turbina
(caudal, pressoes, potencia, etc) ao utilizador.
Na figura 4.6, e possıvel ver um diagrama ilustrativo do funcionamento do sistema de controlo e
monitorizacao do IST.
Da figura acima apresentada destacam-se alguns componentes que, pela importancia que tem
para o correto funcionamento do sistema, devem ser mais aprofundadamente explicados. Entre estes
elementos esta o computador mestre (MASTER), a partir do qual todo o programa de controlo projetado
pelo IST ira atuar, razao pela qual o funcionamento desta unidade tem repercussoes importantıssimas
para todo o sistema.
O computador escravo (SLAVE) estara ligado diretamente ao mestre e esta unidade tera como
principal proposito cumprir as instrucoes que lhe serao fornecidas pelo master. Tem acesso aos valores
obtidos pela unidade de aquisicao de dados (DAQ) e e apos a interpretacao e tratamento destes valores
que serao fornecidas as instrucoes ao automato.
Por ultimo, destaca-se o sistema de aquisicao de dados, que atua como elemento de ligacao entre o
sistema do IST e o sistema de automacao. Este elemento envia os dados do funcionamento da turbina,
gerados pelo sistema do IST, para o automato, que comunica posteriormente com os atuadores das
valvulas. De seguida, o sistema DAQ recebe do automato, as informacoes de confirmacao de que as
42
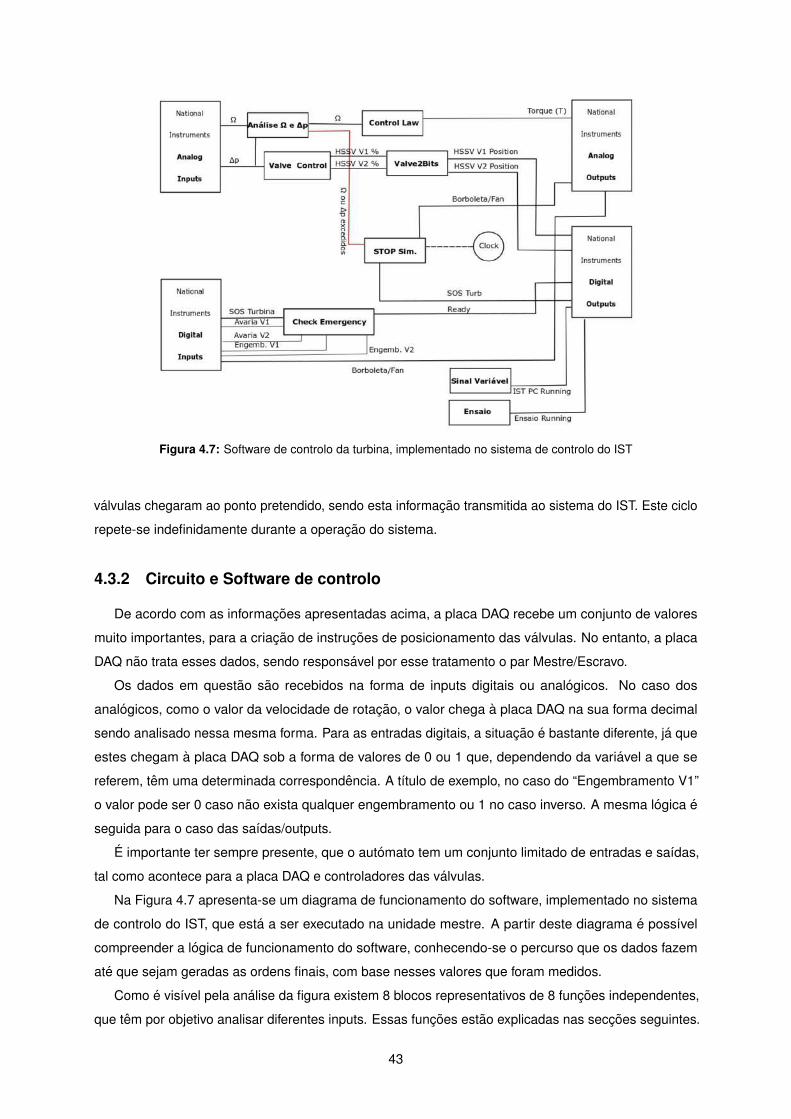
Figura 4.7: Software de controlo da turbina, implementado no sistema de controlo do IST
valvulas chegaram ao ponto pretendido, sendo esta informacao transmitida ao sistema do IST. Este ciclo
repete-se indefinidamente durante a operacao do sistema.
4.3.2 Circuito e Software de controlo
De acordo com as informacoes apresentadas acima, a placa DAQ recebe um conjunto de valores
muito importantes, para a criacao de instrucoes de posicionamento das valvulas. No entanto, a placa
DAQ nao trata esses dados, sendo responsavel por esse tratamento o par Mestre/Escravo.
Os dados em questao sao recebidos na forma de inputs digitais ou analogicos. No caso dos
analogicos, como o valor da velocidade de rotacao, o valor chega a placa DAQ na sua forma decimal
sendo analisado nessa mesma forma. Para as entradas digitais, a situacao e bastante diferente, ja que
estes chegam a placa DAQ sob a forma de valores de 0 ou 1 que, dependendo da variavel a que se
referem, tem uma determinada correspondencia. A tıtulo de exemplo, no caso do “Engembramento V1”
o valor pode ser 0 caso nao exista qualquer engembramento ou 1 no caso inverso. A mesma logica e
seguida para o caso das saıdas/outputs.
E importante ter sempre presente, que o automato tem um conjunto limitado de entradas e saıdas,
tal como acontece para a placa DAQ e controladores das valvulas.
Na Figura 4.7 apresenta-se um diagrama de funcionamento do software, implementado no sistema
de controlo do IST, que esta a ser executado na unidade mestre. A partir deste diagrama e possıvel
compreender a logica de funcionamento do software, conhecendo-se o percurso que os dados fazem
ate que sejam geradas as ordens finais, com base nesses valores que foram medidos.
Como e visıvel pela analise da figura existem 8 blocos representativos de 8 funcoes independentes,
que tem por objetivo analisar diferentes inputs. Essas funcoes estao explicadas nas seccoes seguintes.
43
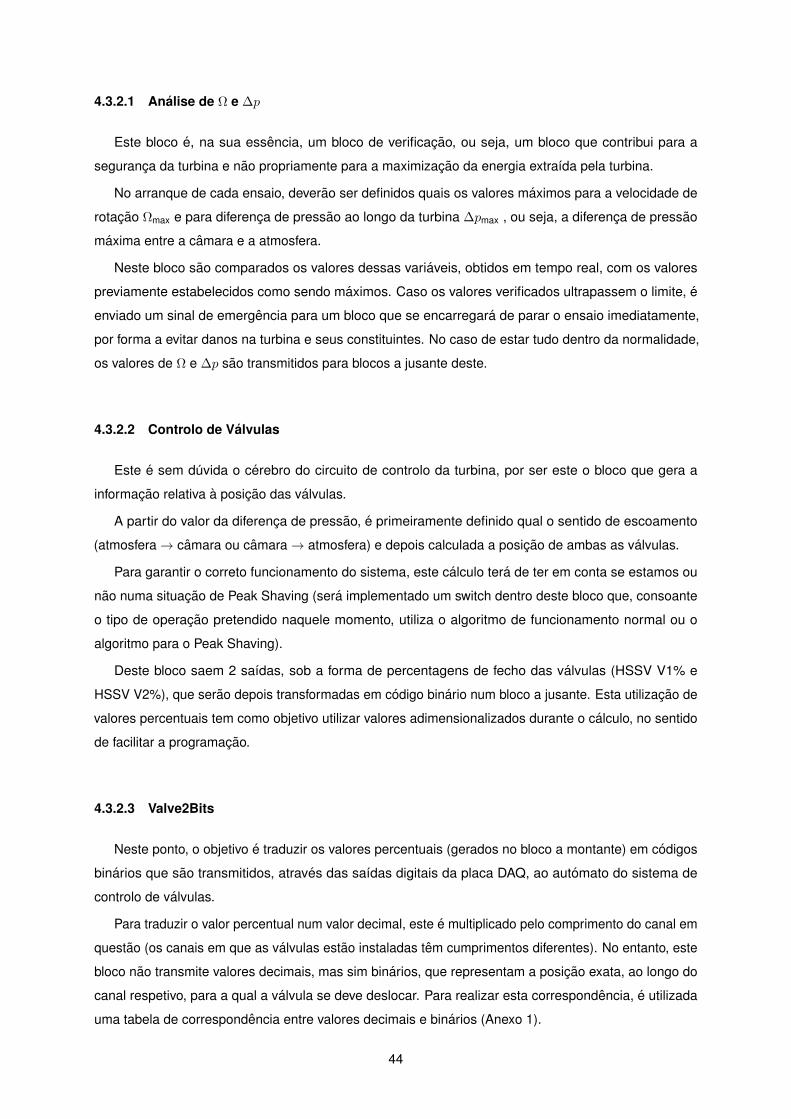
4.3.2.1 Analise de Ω e ∆p
Este bloco e, na sua essencia, um bloco de verificacao, ou seja, um bloco que contribui para a
seguranca da turbina e nao propriamente para a maximizacao da energia extraıda pela turbina.
No arranque de cada ensaio, deverao ser definidos quais os valores maximos para a velocidade de
rotacao Ωmax e para diferenca de pressao ao longo da turbina ∆pmax , ou seja, a diferenca de pressao
maxima entre a camara e a atmosfera.
Neste bloco sao comparados os valores dessas variaveis, obtidos em tempo real, com os valores
previamente estabelecidos como sendo maximos. Caso os valores verificados ultrapassem o limite, e
enviado um sinal de emergencia para um bloco que se encarregara de parar o ensaio imediatamente,
por forma a evitar danos na turbina e seus constituintes. No caso de estar tudo dentro da normalidade,
os valores de Ω e ∆p sao transmitidos para blocos a jusante deste.
4.3.2.2 Controlo de Valvulas
Este e sem duvida o cerebro do circuito de controlo da turbina, por ser este o bloco que gera a
informacao relativa a posicao das valvulas.
A partir do valor da diferenca de pressao, e primeiramente definido qual o sentido de escoamento
(atmosfera→ camara ou camara→ atmosfera) e depois calculada a posicao de ambas as valvulas.
Para garantir o correto funcionamento do sistema, este calculo tera de ter em conta se estamos ou
nao numa situacao de Peak Shaving (sera implementado um switch dentro deste bloco que, consoante
o tipo de operacao pretendido naquele momento, utiliza o algoritmo de funcionamento normal ou o
algoritmo para o Peak Shaving).
Deste bloco saem 2 saıdas, sob a forma de percentagens de fecho das valvulas (HSSV V1% e
HSSV V2%), que serao depois transformadas em codigo binario num bloco a jusante. Esta utilizacao de
valores percentuais tem como objetivo utilizar valores adimensionalizados durante o calculo, no sentido
de facilitar a programacao.
4.3.2.3 Valve2Bits
Neste ponto, o objetivo e traduzir os valores percentuais (gerados no bloco a montante) em codigos
binarios que sao transmitidos, atraves das saıdas digitais da placa DAQ, ao automato do sistema de
controlo de valvulas.
Para traduzir o valor percentual num valor decimal, este e multiplicado pelo comprimento do canal em
questao (os canais em que as valvulas estao instaladas tem cumprimentos diferentes). No entanto, este
bloco nao transmite valores decimais, mas sim binarios, que representam a posicao exata, ao longo do
canal respetivo, para a qual a valvula se deve deslocar. Para realizar esta correspondencia, e utilizada
uma tabela de correspondencia entre valores decimais e binarios (Anexo 1).
44

4.3.2.4 Emergencia
Este bloco ira analisar os outputs de emergencia do automato, com o intuito de perceber se esta tudo
a postos para retomar a atividade normal do sistema, apos uma situacao de emergencia. Existem 2
tipos de situacoes de emergencia diferentes, uma relacionada com o sistema de valvulas e outra com a
ultrapassagem dos valores limite de Ω ou ∆p.
No primeiro caso, os sinais recebidos sao sinais de avaria ou engembramento da valvula e o automato
devera, em resposta, enviar imediatamente um sinal ao variador/valvula de borboleta para cortar o
caudal que passa na turbina. A partir desse momento, este bloco fica a aguardar que o utilizador lhe
transmita que tudo esta resolvido. Quando isso acontece, envia o sinal ready para que o sistema retome
a atividade normal e no ciclo seguinte, se estiver tudo realmente resolvido, o sinal de avarias vem a 0 e o
caudal nao e cortado.
No segundo tipo de emergencia, e enviado um sinal (SOS Turb), atraves da funcao “STOP Sim”, para
que o automato feche imediatamente as valvulas, sendo esse mesmo sinal devolvido ao sistema DAQ
para que possamos saber se o automato reconheceu o sinal de emergencia e procedeu em conformidade.
Assim, caso esse sinal seja recebido pelo bloco Emergencia, quer dizer que ja foi ativada a emergencia
previamente. O sistema devera entao aguardar por um sinal do utilizador, dizendo que tudo esta resolvido
para que se possa enviar ao automato a informacao de que podem retomar o funcionamento normal
(sinal “Ready”).
4.3.2.5 Lei de Controlo da Turbina
Nesta unidade esta implementada a lei de controlo da turbina.
E recebido como input a velocidade de rotacao verificada naquele instante e e gerado como output o
valor do binario (T).
4.3.2.6 Sinal Variavel e Ensaio
Estes sao blocos muito simples, que tem como unico objetivo enviar um sinal a variar constantemente
entre 0 e 1 para que se possa saber se, por alguma razao, o sistema de controlo bloqueou e saber se o
ensaio esta a decorrer ou ja parou, respetivamente.
Na situacao de o ensaio estar a decorrer e o sistema de controlo bloquear, o automato deteta a
situacao imediatamente, fecha as valvulas e envia o sinal ao variador/valvula de borboleta, para que
corte a passagem de caudal na turbina. No caso de o ensaio ter acabado, independentemente do outro
sinal, procede-se ao fecho das valvulas e corte de caudal.
4.4 Sistema de Valvulas
O sistema de valvulas ira atuar de acordo com as ordens geradas pelo sistema de controlo do IST,
recebendo as ordens do mesmo atraves do automato instalado no sistema.
45

Figura 4.8: Vista em corte (3D) da turbina. Valvulas representadas pelos segmento brancos nos canais 1 e 2
Tabela 4.1: Comprimento de cada um dos canais das valvulas
Valvula V1 V2Canal 1 2
Comprimento [mm] 44 68
Tal como referido em seccoes anteriores, o controlo da turbina sera feito de dois modos distintos.
Um dos modos e o controlo em Peak Shaving e o outro, que nao contempla esta caracterıstica, sera
apelidado de controlo normal.
Em primeiro lugar, para que seja mais facil compreender o funcionamento do sistema, deixa-se na
figura 4.8 uma vista em corte do desenho 3D da turbina onde e possıvel ver o posicionamento de cada
uma das valvulas.
De acordo com a seccao X, no modo normal, as valvulas tem um ciclo de fecho e abertura em funcao
da pressao que e medida na turbina, admitindo-se apenas posicoes de valvula totalmente aberta ou
totalmente fechada.
Para o controlo em Peak Shaving, existem ainda tres sub-modos. Sao eles, Peak Shaving no rotor
ativo, Peak Shaving no rotor passivo e, Peak Shaving em ambos os rotores.
Considerando um funcionamento em Peak Shaving no rotor ativo, para o caso de escoamento fluir no
sentido da atmosfera para a camara (ver Fig. 3.2), a valvula do canal 1 encontra-se fechada e a do canal
2 varia a sua posicao, entre fechada e aberta, de modo a limitar a potencia produzida.
A Fig. 4.9 apresentam o funcionamento das valvulas em modo normal e peak shaving.
Doravante denomina-se a valvula do canal 1 por V1 e a valvula do canal 2 por V2. Na tabela abaixo
encontra-se o comprimento de cada um dos canais, para cada uma das valvulas.
Na Figura 4.10 apresenta-se um diagrama de funcionamento do sistema de valvulas. Como visıvel,
existem 3 atuadores para cada valvula, estando estes sincronizados entre eles para garantir que nao
existem desfasamentos e consequentes engembramentos da valvula no canal. Cada atuador tem um
46
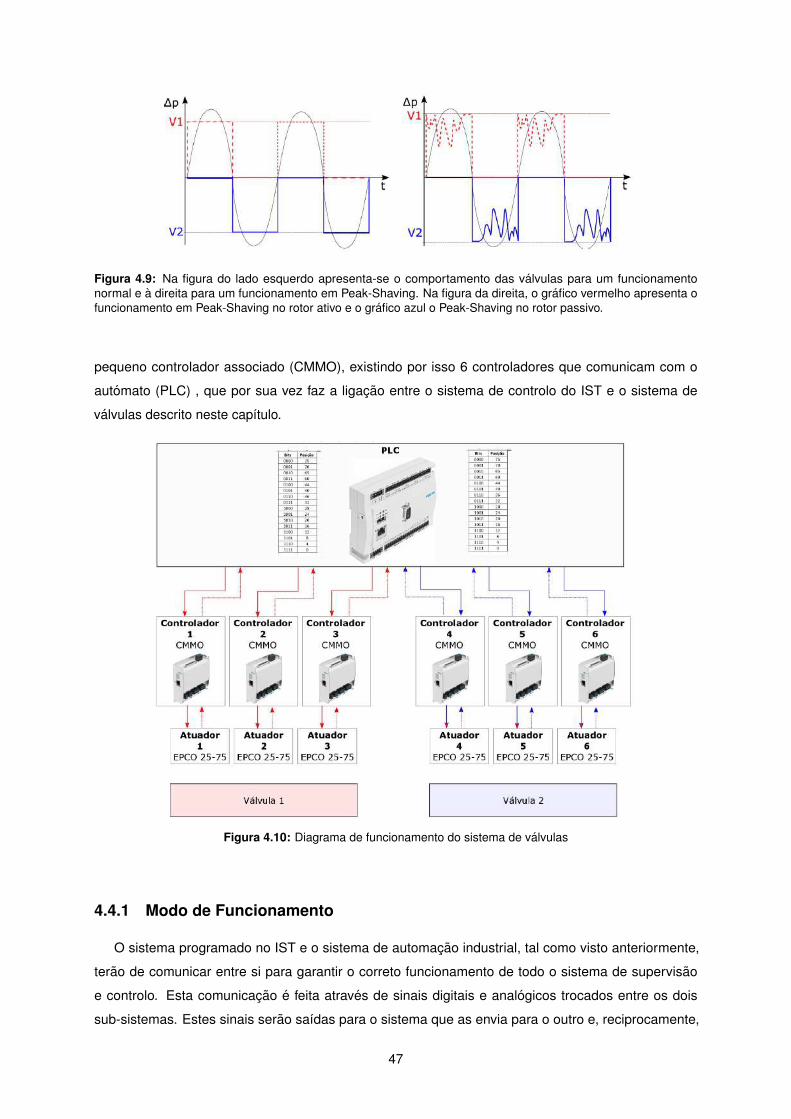
Figura 4.9: Na figura do lado esquerdo apresenta-se o comportamento das valvulas para um funcionamentonormal e a direita para um funcionamento em Peak-Shaving. Na figura da direita, o grafico vermelho apresenta ofuncionamento em Peak-Shaving no rotor ativo e o grafico azul o Peak-Shaving no rotor passivo.
pequeno controlador associado (CMMO), existindo por isso 6 controladores que comunicam com o
automato (PLC) , que por sua vez faz a ligacao entre o sistema de controlo do IST e o sistema de
valvulas descrito neste capıtulo.
Figura 4.10: Diagrama de funcionamento do sistema de valvulas
4.4.1 Modo de Funcionamento
O sistema programado no IST e o sistema de automacao industrial, tal como visto anteriormente,
terao de comunicar entre si para garantir o correto funcionamento de todo o sistema de supervisao
e controlo. Esta comunicacao e feita atraves de sinais digitais e analogicos trocados entre os dois
sub-sistemas. Estes sinais serao saıdas para o sistema que as envia para o outro e, reciprocamente,
47

Figura 4.11: Entradas do automato
Figura 4.12: Saıdas do automato
entradas para o que os recebe.
Conhecida a organica de comunicacao entre os sistemas, e importante saber tambem que, tal como
aflorado anteriormente, cada integrante do sistema, tem um numero limitado de portas de comunicacao
(entradas e saıdas, quer digitais quer analogicas), pelo que e de extrema importancia projetar um
protocolo de comunicacao que, por um lado garanta o correto funcionamento do sistemas mas que, por
outro lado utilize o mınimo numero possıvel de portas.
Esta questao e particularmente importante no que toca ao automato do sistema de automacao que,
por definicao, tem 20 entradas e 20 saıdas sendo que, para alargar esse valor de portas, e necessario
comprar expansoes, cujo custo e extremamente elevado. Por essa razao, o automato foi analisado e
projetado de um modo mais cuidadoso que todos os outros integrantes do sistema, sendo neste capıtulo
apresentado todo o organigrama de saıdas e entradas do mesmo.
Este esforco para atingir um equilıbrio entre a robustez do sistema e o numero de portas de
comunicacao utilizadas, esta patente nas figuras 4.11 e 4.12 onde se apresentam os esquemas de
entradas e saıdas do automato, respetivamente.
Nas seccoes seguintes apresentam-se, detalhadamente, todos os sinais apresentados nas tabelas.
48

4.4.1.1 Sinais de Entrada
Estas entradas sao enviadas do sistema de controlo do IST para o automato e serao enviadas deste
para os controladores das valvulas, que farao os atuadores deslocar-se do modo e para a posicao
pretendida.
De seguida descrevem-se entao as entradas digitais do automato e qual o seu significado:
• DI0-DI4
Este conjunto de portas define a posicao, a cada instante da valvula 1. Este conjunto de portas
pode ser visto como um numero decimal definido em numero binario.
• DI5-DI9
Este conjunto de portas define a posicao, a cada instante da valvula 2. Este conjunto de portas
pode ser visto como um numero decimal definido em numero binario.
• DI10
Esta porta indica ao PLC que pode sair do ciclo de emergencia.
• DI11
Esta porta indica ao PLC que tem de entrar em ciclo de emergencia devido a, por exemplo,
velocidade de rotacao ter sido excedida. As duas valvulas devem fechar de imediato e a porta DO4
deve de tomar o valor 1 (ver especificacoes da porta DO4 na seccao seguinte).
• DI12
Esta porta indica ao PLC que o computador do IST esta a adquirir sinal. O sinal recebido por esta
porta sera uma onda quadrada de perıodo a definir. Se o sinal for de valor constante 0 ou 1, e a
porta DI10 =1, o computador do IST pode ter bloqueado. As duas valvulas fecham-se e a porta
DO4 = 1.
• DI13
Esta porta indica ao PLC que o ensaio esta a decorrer. Se 1 o ensaio esta a decorrer, se 0 o ensaio
parou.
4.4.2 Sinais de Saıda
Estas saıdas sao enviadas para o automato pelos controladores das valvulas e serao enviadas deste
para o sistema de controlo do IST permitindo o tratamento destes dados de acordo com o sistema/circuito
previamente apresentado.
De seguida descrevem-se entao as saıdas digitais do automato e qual o seu significado:
• DO0 – DO1
49

O engembramento acima referido tera de ser controlado com recurso a sensores de posicao dos
atuadores/valvula [estes valores podem ser adquiridos diretamente do atuador ou, eventualmente,
atraves de sensores de proximidade].
A conclusao sobre o engembramento da valvula deve ser conseguida pela diferenca entre os
valores de posicao dos varios atuadores. Caso o valor maximo dessas diferencas seja superior a
um valor x indicado pelo utilizador conclui-se que existe engembramento.
• DO2 – DO3
Havendo uma avaria num dos atuadores, respetiva a uma determinada valvula, a porta digital deve
de ser ligada.
• DO4
A porta DI11=1 e a porta DO4=1 indicam que o PLC entrou em modo de emergencia.
• DO5
Caso esta porta possua o valor 0, fecha a valvula borboleta ou ventilador que impoe o escoamento
na turbina.
Esta assim definido todo o sistema de controlo da turbina incluindo o sistema de valvulas, o sistema
de controlo do IST e respetivo software. Este sistema tem por objetivo, como abordado previamente,
garantir o bom funcionamento da turbina, evitando funcionamento fora dos parametros estabelecidos, e
maximizar a quantidade e qualidade da energia produzida.
E ainda importante realcar que, de acordo com o protocolo interno do sistema de atuadores e
controladores, poderao surgir novos sinais de entrada e saıda que, nao estando planeados, possam ser
necessarios ao funcionamento de todo o sistema.
50

Capıtulo 5
Construcao do modelo
5.1 Introducao
Tendo em conta todos os requisitos iniciais do projeto, apresentou-se, nos capıtulos 3 e 4, a fase de
projeto tanto da estrutura da turbina e seu chassis como tambem do sistema de valvulas. Uma vez que
o resultado final, alcancado para cada um destes elementos do modelo, satisfaz, a partida, todas as
necessidades e objetivos previos, e possıvel iniciar-se a fase de producao e montagem do prototipo.
Nesta fase, e importante diferenciar de imediato, quais os componentes que serao produzidos no
IST e quais serao encomendados a entidades externas. Dado que o IST, nao dispoes de capacidade
para realizar cortes de chapa destas dimensoes, quer por jato de agua quer por laser, bem como
calandrar chapas de grandes dimensoes ou maquinar polımeros, todos os componentes foram produzidos
externamente, a excecao das partes produzidas em resina de poliuretano compacto. Estas ultimas, foram
implementadas precisamente com o objetivo de diminuir o numero de pecas a produzir externamente,
por meio a reduzir o custo de producao, sem perda de desempenho e fiabilidade da turbina.
Para produzir estas pecas, e necessario ter algum conhecimento previo, relativo ao comportamento
deste termoendurecıvel. Neste caso, uma vez que ja se havia utilizado estas tecnicas previamente [13]
e que existem dados tecnicos relativos a esta resina na literatura [34] ,iniciou-se a producao destes
componentes logo no inıcio da fase de construcao.
As restantes pecas foram encomendadas a entidades externas sendo que, para chegar a fase de
producao, foi necessario realizar um estudo de mercado, visitar as instalacoes das empresas, a fim de
compreender a sua capacidade produtiva e iniciar o processo burocratico para a execucao das pecas.
Devido a necessidade de seguir todo este procedimento, esta foi uma fase prolongada que ocupou cerca
de 30% a 40% do tempo total despendido neste projeto.
Encerrada a fase de producao, deu-se inıcio a fase de montagem realizada integralmente nas
instalacoes do IST. Pela quantidade de elementos, tamanho da estrutura e sua complexidade esta foi
tambem uma etapa prolongada. No total e em conjunto com a etapa anterior, este capıtulo representa
quase 60% do tempo total do projeto.
Nos capıtulos seguintes, apresentam-se explicacoes detalhadas referentes a producao e montagem
51

dos sub-conjuntos, que compoem a estrutura total.
5.2 Producao e montagem de sub-conjuntos
Nesta etapa, ja existiam desenhos detalhados para todos os componentes da turbina e ja havia sido
escolhido qual o material a utilizar, qual o metodo de processamento de material a empregar e qual o
tratamento superficial a aplicar.
Uma vez que as pecas envolvidas neste projeto tinham diferentes funcoes, foi necessario utilizar
diferentes processos e aplicar diferentes especificacoes para cada conjunto de pecas. De seguida,
apresentam-se os subconjuntos mais relevantes, quais as suas especificacoes de producao e o resultado
da montagem dos mesmos.
5.2.1 Estator
O estator e, pela importancia que tem no desempenho da turbina, um sub-conjunto muito importante.
De acordo com a fase de projeto, decidiu-se utilizar um estator em que as pas estao fixas entre duas
chapas, que apresentam ranhuras para a instalacao de pas. Uma vez que atras das chapas ranhuradas,
estao chapas lisas, as pas nao conseguem mover-se daquele local, sem que um agente de manutencao
afaste, manualmente, as chapas para retirar ou inspecionar as pas.
As pas sao sem qualquer duvida os componentes mais delicados nao so pela sua funcao mas
tambem pelo metodo de producao. Este metodo encontra-se explicado em detalhe na seccao 5.3. A sua
montagem obriga a retificacao individual das pas, a fim de garantir que nao existem marcas nas pas,
provenientes do processo de producao, e minimizar as folgas entre as pas e as ranhuras nas chapas
que, por serem cortadas a jato de agua, nao tem a dimensao exata da pa.
Estas chapas, apresentadas na figura 5.1, sao produzidas em aco carbono posteriormente metalizado
e pintado.
Figura 5.1: Chapas para montagem das pas do estator
52

Figura 5.2: Estator da Turbina, ja assemblado
Para alem disso, sao feitos 8 furos radiais, que servirao para a passagem dos varoes roscados que,
tal como mencionado anteriormente neste documento, permitem a montagem da estrutura. Estes furos
sao absolutamente cruciais para o correto alinhamento da estrutura.
Na figura 5.2, apresenta-se o resultado final do estator, com este sub-conjunto ja assemblado.
5.2.2 Rotor
Este componente, e um dos mais delicados de todo o sistema e inclui a conduta onde o rotor funciona,
as pas do rotor, as suas fixacoes e o volante de inercia.
Uma vez que o rotor e uma parte fundamental da maquina, as especificacoes de producao destes
componentes eram apertadas.
As pas do estator seguem o mesmo processo de fabrico das pas do estator, pelo que se reporta a
seccao previamente referida, para uma explicacao detalhada.
Para alem da producao, as pas sao um elemento especialmente complexo, pois a sua montagem
no volante de inercia do rotor e especialmente complexa. Para conseguir fixar as pas no volante, e
necessario retificar todas as pas individualmente, para que todas estejam perfeitas e sem marcas
provenientes do vazamento da resina, sendo posteriormente coladas ao volante, sem quaisquer folgas
entre elas. Este processo esta ilustrado na figura 5.3.
(a)
(b) (c)
Figura 5.3: Montagem do rotor. (a) Volante de Inercia preparado para a montagem das pas. (b) Fixacao das pas novolante. (c) Retificacao individual das pas
A conduta, devido ao seu elevado diametro, resultou da calandragem de chapa o que acarreta sempre
um elevado risco de ovalizacao. Uma vez que, para evitar caudais de fuga, e crucial que a conduta tenha
53

uma forma circular, o mais perfeita possıvel, e pouca folga em relacao ao rotor, foi imposta a necessidade
de maquinacao/torneamento, para evitar ou resolver quaisquer deformacoes.
Este ultimo elemento, e composto nao so pela chapa calandrada mas tambem por segmentos de
resina, que conferem ao escoamento as caracterısticas necessarias tanto a entrada como a saıda do
rotor (estes segmentos fazem, de um lado parte da conduta de entrada e do outro parte da conduta de
saıda). Estes elementos sao abordados na seccao respeitante as pecas fabricadas em resina.
Para possibilitar a sua montagem, a conduta e ainda soldada, atraves de elementos designados por
”chaves de ligacao”, a 2 chapas redondas, que apresentam os furos para passagem dos varoes roscados.
Este subconjunto com a conduta, sera montado previamente ao rotor, que so sera montado no final,
juntamente com o veio. Na figura 5.4, e possıvel ver a conduta ja montada, com as chapas soldadas.
Quanto as restantes pecas como os aneis de fixacao e o volante de inercia, foram produzidas
recorrendo a maquinas CNC de 5 eixos, com tolerancias apertadas.
Na figura 5.5, apresenta-se o resultado final do rotor, com este sub-conjunto ja assemblado.
Figura 5.4: Conduta do rotor preparada para a montagem
54

Figura 5.5: Rotor da Turbina, ja assemblado
5.2.3 Chassis da Estrutura
A estrutura de suporte da turbina, vulgarmente definida neste documento por ”chassis”, foi integralmente
produzida no IST, a partir de perfis e tubos normalizados.
Para obter a forma final, resultante da fase de projeto, utilizou-se soldadura por eletrodo revestido,
criando as duas ”malhas”previamente abordadas. Estas foram tambem soldadas uma a outra, resultando
na estrutura final. Esta pode ser vista nas imagens do capıtulo seguinte, recolhidas durante a montagem
do modelo.
5.2.4 Difusor de Saıda
Devido a sua relativa complexidade geometrica e grandes dimensoes, o difusor de saıda teve de ser
produzido externamente.
As duas partes do difusor, produzidas de acordo com o projeto, ligam-se atraves de ligacoes
aparafusadas, sendo essa a unica montagem necessaria, uma vez que a estrutura de ambas as partes
do difusor, ja vinha soldada do fornecedor.
Aquando da producao destes elementos, o foco centrou-se na garantia de que os furos para ligacao
entre as duas metades estavam de acordo com o projeto CAD, por forma a evitar complicacoes durante
a montagem. Essa garantia foi verificada e na figura 5.6 pode ver-se o difusor ja montado na estrutura.
5.2.5 Chapa Central
A chapa central do modelo e o elemento estruturalmente mais importante do modelo, por garantir
o suporte e alinhamento do veio, atraves de uma caixa de 2 rolamentos e por suportar todo o peso
do difusor de saıda. Para alem disso, esta chapa tem tambem os 8 furos, que garantem um correto
centramento dos varios elementos da turbina.
55

Figura 5.6: Difusor de saıda da turbina, durante a montagem da estrutura
Este componente e, de todas as chapas, o que apresenta uma maior espessura e volumetria. No
centro, permite a montagem da caixa de rolamentos que suporta o veio. Garante ainda a fixacao de um
anel de pecas de resina, que faz parte da conduta de saıda.
Os rolamentos selecionados permitem alcancar velocidades de rotacao de 6000 rpm, valor muito
acima do projetado para este modelo, e sao auto-lubrificantes, ou seja, nao e necessaria a aplicacao de
massa lubrificante para a correta operacao do equipamento. Utilizaram-se dois rolamentos para garantir
o bom posicionamento do veio, uma vez que este foi projetado para suster 2 rotores em funcionamento.
Este componente providencia ainda suporte para parte da conduta de saıda, atraves de ligacoes
aparafusadas entre este e a caixa de rolamentos.
Na figura 5.7, e possıvel observar o sub-conjunto da chapa, rolamentos, veio e conduta ja montado.
Figura 5.7: Sub-conjunto da chapa central preparado para a montagem na estrutura
56
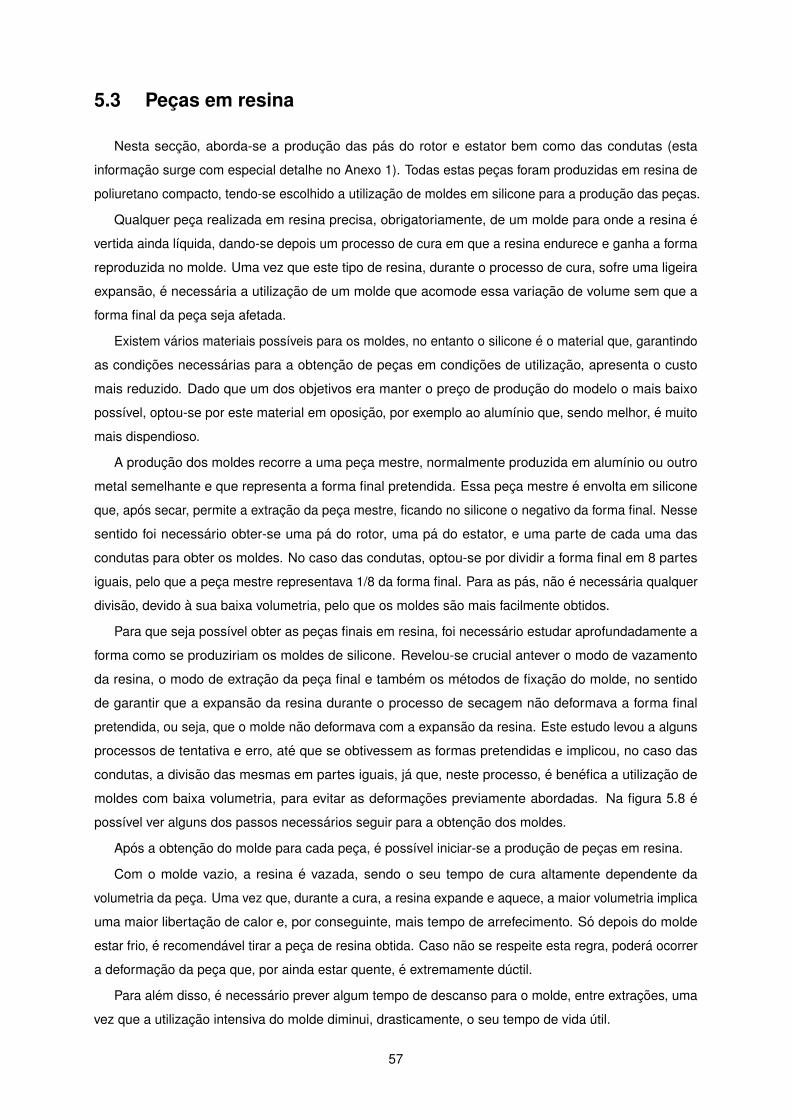
5.3 Pecas em resina
Nesta seccao, aborda-se a producao das pas do rotor e estator bem como das condutas (esta
informacao surge com especial detalhe no Anexo 1). Todas estas pecas foram produzidas em resina de
poliuretano compacto, tendo-se escolhido a utilizacao de moldes em silicone para a producao das pecas.
Qualquer peca realizada em resina precisa, obrigatoriamente, de um molde para onde a resina e
vertida ainda lıquida, dando-se depois um processo de cura em que a resina endurece e ganha a forma
reproduzida no molde. Uma vez que este tipo de resina, durante o processo de cura, sofre uma ligeira
expansao, e necessaria a utilizacao de um molde que acomode essa variacao de volume sem que a
forma final da peca seja afetada.
Existem varios materiais possıveis para os moldes, no entanto o silicone e o material que, garantindo
as condicoes necessarias para a obtencao de pecas em condicoes de utilizacao, apresenta o custo
mais reduzido. Dado que um dos objetivos era manter o preco de producao do modelo o mais baixo
possıvel, optou-se por este material em oposicao, por exemplo ao alumınio que, sendo melhor, e muito
mais dispendioso.
A producao dos moldes recorre a uma peca mestre, normalmente produzida em alumınio ou outro
metal semelhante e que representa a forma final pretendida. Essa peca mestre e envolta em silicone
que, apos secar, permite a extracao da peca mestre, ficando no silicone o negativo da forma final. Nesse
sentido foi necessario obter-se uma pa do rotor, uma pa do estator, e uma parte de cada uma das
condutas para obter os moldes. No caso das condutas, optou-se por dividir a forma final em 8 partes
iguais, pelo que a peca mestre representava 1/8 da forma final. Para as pas, nao e necessaria qualquer
divisao, devido a sua baixa volumetria, pelo que os moldes sao mais facilmente obtidos.
Para que seja possıvel obter as pecas finais em resina, foi necessario estudar aprofundadamente a
forma como se produziriam os moldes de silicone. Revelou-se crucial antever o modo de vazamento
da resina, o modo de extracao da peca final e tambem os metodos de fixacao do molde, no sentido
de garantir que a expansao da resina durante o processo de secagem nao deformava a forma final
pretendida, ou seja, que o molde nao deformava com a expansao da resina. Este estudo levou a alguns
processos de tentativa e erro, ate que se obtivessem as formas pretendidas e implicou, no caso das
condutas, a divisao das mesmas em partes iguais, ja que, neste processo, e benefica a utilizacao de
moldes com baixa volumetria, para evitar as deformacoes previamente abordadas. Na figura 5.8 e
possıvel ver alguns dos passos necessarios seguir para a obtencao dos moldes.
Apos a obtencao do molde para cada peca, e possıvel iniciar-se a producao de pecas em resina.
Com o molde vazio, a resina e vazada, sendo o seu tempo de cura altamente dependente da
volumetria da peca. Uma vez que, durante a cura, a resina expande e aquece, a maior volumetria implica
uma maior libertacao de calor e, por conseguinte, mais tempo de arrefecimento. So depois do molde
estar frio, e recomendavel tirar a peca de resina obtida. Caso nao se respeite esta regra, podera ocorrer
a deformacao da peca que, por ainda estar quente, e extremamente ductil.
Para alem disso, e necessario prever algum tempo de descanso para o molde, entre extracoes, uma
vez que a utilizacao intensiva do molde diminui, drasticamente, o seu tempo de vida util.
57

(a) (b) (c)
Figura 5.8: Procedimento para a obtencao de moldes de silicone.(a) Preparacao da caixa do molde para enchimentocom silicone. (b) Silicone em processo de cura para obtencao do molde. (c) Silicone seco e molde preparado pararetirar master e comecar a producao.
Apos toda a fase de producao de pecas de resina, concluiu-se existir um tempo de cura de 3 horas
para as pecas mais pequenas e 6 horas para as pecas maiores. Foi tambem possıvel estimar o tempo
de vida util dos moldes em 18 a 21 extracoes, sem perda de propriedades geometricas da peca extraıda.
Na figura 5.9 apresentam-se alguns exemplos de pecas extraıdas.
Uma vez que o processo seguido nao respeita as normas existentes (ISO 16365-1:2014) ou praticas
sugeridas na literatura [35], por falta de equipamento, foi necessaria uma inspecao visual detalhada, para
verificar se existiam pecas com algum defeito. Nas pecas em que o defeito era detetado, procedia-se a
sua reparacao atraves de betumagem, seguindo-se depois nova inspecao, para verificar se o problema
havia sido resolvido.
Produzidas e reparadas todas as pecas em resina necessarias, as pas foram diretamente montadas
nos respetivos sıtios, enquanto que no caso das condutas foi necessario juntar as 8 partes de cada
uma, para obter a forma final. Este processo de juncao recorreu a utilizacao de aros de metal fixos
com parafusos a cada uma das partes, tendo sido necessaria a betumagem da forma final, a fim de
preencher os espacos entre cada uma das partes. A figura 5.10 apresenta imagens da conduta, durante
o seu processo de montagem.
5.4 Montagem Final
A montagem do modelo foi totalmente feita no IST, diretamente no laboratorio onde este iria ser
ensaiado. Como referido anteriormente, este processo foi prolongado e complexo, tendo existido diversos
contratempos ate a sua conclusao.
Importa recordar que a turbina e composta por 2 zonas iguais que estao separadas por uma chapa
central. Por uma questao de simplicidade da montagem e segundo a Figura 3.3 deste documento, a
montagem foi feita da direita para a esquerda, tendo sido montada unica e exclusivamente a zona da
turbina mais proxima do gerador.
O facto de se ter montado apenas metade do modelo, prende-se com a necessidade de ensaiar
58
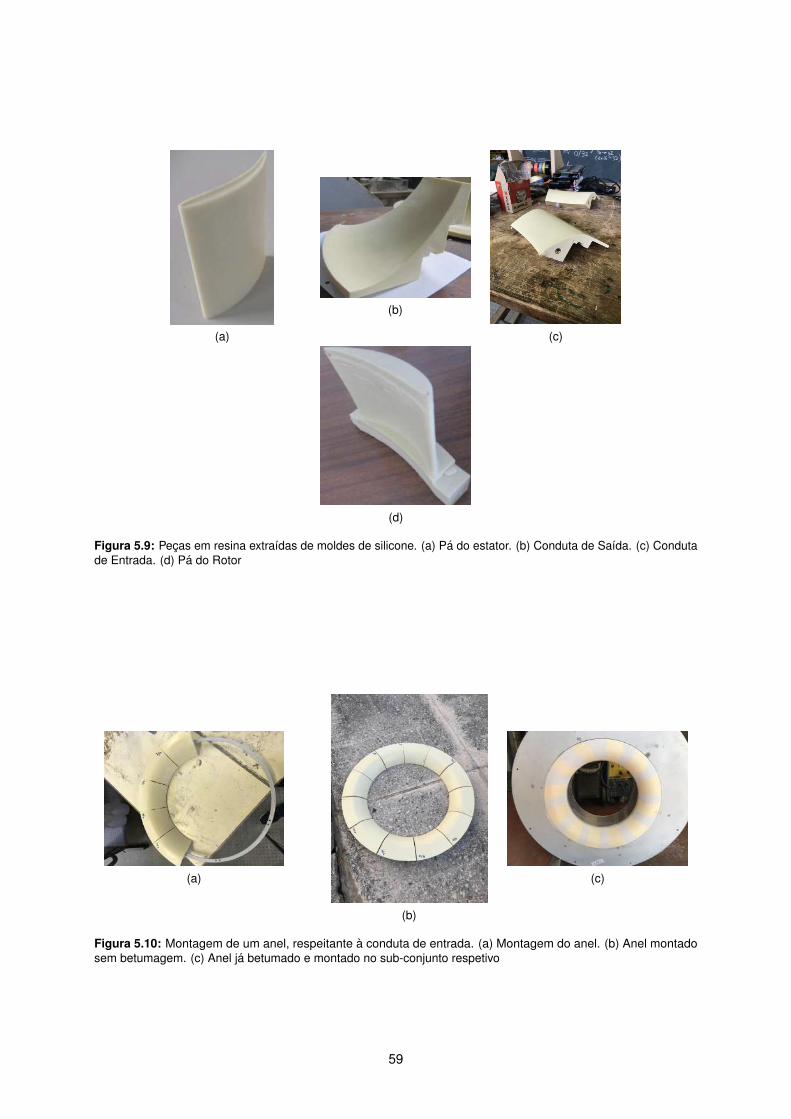
(a)
(b)
(c)
(d)
Figura 5.9: Pecas em resina extraıdas de moldes de silicone. (a) Pa do estator. (b) Conduta de Saıda. (c) Condutade Entrada. (d) Pa do Rotor
(a)
(b)
(c)
Figura 5.10: Montagem de um anel, respeitante a conduta de entrada. (a) Montagem do anel. (b) Anel montadosem betumagem. (c) Anel ja betumado e montado no sub-conjunto respetivo
59

apenas metade da turbina, para definir as primeiras curvas de funcionamento e retirar dados suficientes,
para que seja possıvel conhecer o desempenho do dispositivo. So depois de retirados esses dados, se
pode proceder a montagem da segunda parte, tarefa que ja nao se enquadra no ambito desta tese.
Para iniciar este processo, foi necessario transportar o ”chassis”para o local de montagem da turbina,
tendo-se iniciado simultaneamente a montagem dos varios subconjuntos, previamente descritos. Este
procedimento, teve como intuito facilitar a montagem final do modelo, evitando-se a montagem peca a
peca no chassis, o que, por razoes de seguranca e de complexidade da montagem, nao era aconselhavel.
Durante o processo de montagem, foi necessario ter alguns cuidados especiais, nomeadamente,
com o posicionamento das chapas no chassis, uma vez que o seu correto alinhamento era fulcral para o
bom funcionamento da turbina. Esta atencao especial, permitiu-nos concluir que algumas das pecas
encomendadas ao exterior, apesar das especificacoes fornecidas, apresentavam erros de maquinacao,
como furos mal posicionados ou dimensoes erradas.
Os problemas verificados, passaram, por exemplo, pelo diametro da conduta do rotor que, estando
errado, obrigou a nova maquinacao da peca e tambem pelas furacoes relativas aos 8 varoes estruturais
que nao estavam coincidentes de peca para peca, entre outros erros.
Estes problemas obrigaram a retificacao de mais de 40% das pecas encomendadas o que, como
seria de esperar, nao so atrasou todo o processo de montagem, como tambem aumentou tambem o
risco de existirem desalinhamentos consideraveis no final da montagem.
Nas figuras 5.11 e 5.12 apresentam-se algumas imagens relativas a montagem do modelo.
(a) (b)
(c)
Figura 5.11: Montagem do modelo. (a) e (b) Montagem da conduta do rotor. (c) montagem do difusor de saıda.
60

(d) (e)
(f)
(g)
(h)
Figura 5.12: Montagem do modelo (cont).(d) Montagem da caixa de rolamentos. (e) Montagem da chapa central eveio. (f) Montagem do Rotor. (g) Finalizacao da montagem. (h) Modelo Final
Durante o processo de montagem e apesar de todos os esforcos empregues na retificacao das
varias pecas defeituosas, concluiu-se que nao era possıvel garantir que, montados todos os elementos,
o alinhamento fosse perfeito. Estes problemas relativos ao alinhamento de todos os constituintes do
modelo, levaram a um atraso muito significativo no processo de montagem, mais concretamente, de 4
semanas.
Dos varios problemas, destacam-se os problemas com alguns fornecedores, que nao cumpriram
prazos de entrega nem especificacoes de producao e tambem os problemas, ja referidos, devido ao
desalinhamento da estrutura. Estes ultimos obrigaram, entre outros processos, a repeticao da montagem
de diversos sub-conjuntos que, depois de uma primeira montagem, se verificava nao estarem em
condicoes de funcionamento, necessitando de novas retificacoes.
Todas estas questoes terao de ser levadas em linha de conta durante a analise dos resultados
provenientes dos ensaios realizados.
61
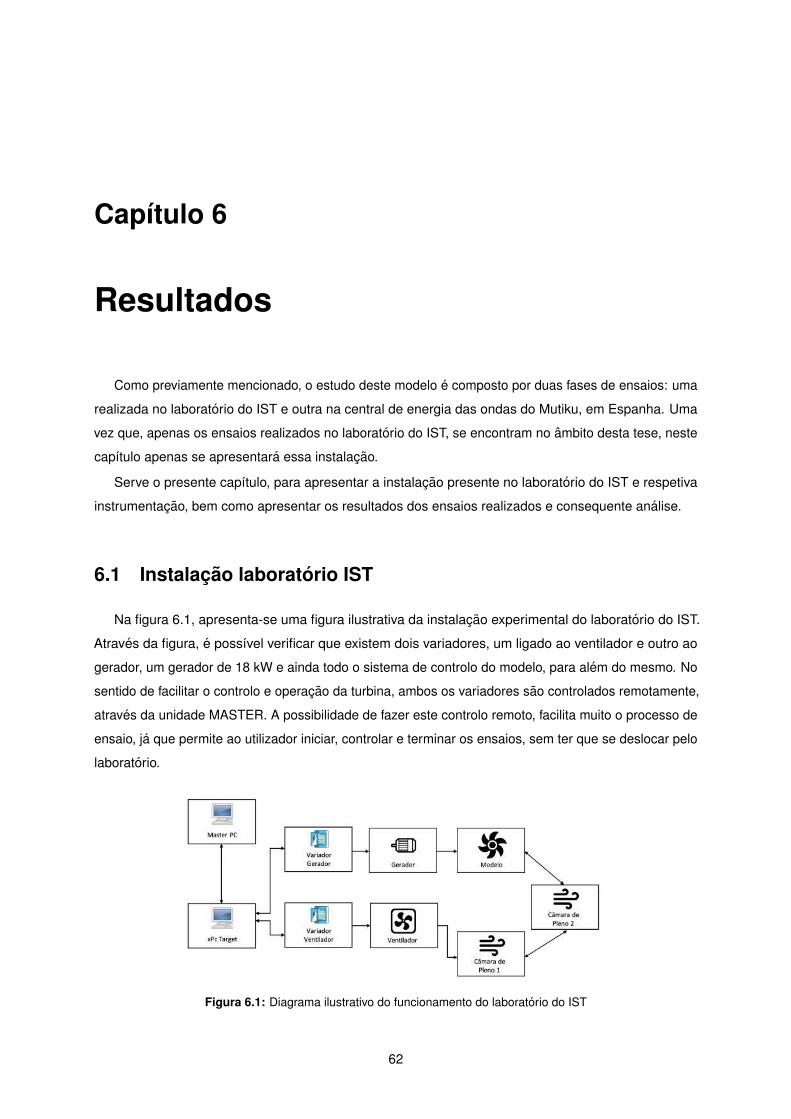
Capıtulo 6
Resultados
Como previamente mencionado, o estudo deste modelo e composto por duas fases de ensaios: uma
realizada no laboratorio do IST e outra na central de energia das ondas do Mutiku, em Espanha. Uma
vez que, apenas os ensaios realizados no laboratorio do IST, se encontram no ambito desta tese, neste
capıtulo apenas se apresentara essa instalacao.
Serve o presente capıtulo, para apresentar a instalacao presente no laboratorio do IST e respetiva
instrumentacao, bem como apresentar os resultados dos ensaios realizados e consequente analise.
6.1 Instalacao laboratorio IST
Na figura 6.1, apresenta-se uma figura ilustrativa da instalacao experimental do laboratorio do IST.
Atraves da figura, e possıvel verificar que existem dois variadores, um ligado ao ventilador e outro ao
gerador, um gerador de 18 kW e ainda todo o sistema de controlo do modelo, para alem do mesmo. No
sentido de facilitar o controlo e operacao da turbina, ambos os variadores sao controlados remotamente,
atraves da unidade MASTER. A possibilidade de fazer este controlo remoto, facilita muito o processo de
ensaio, ja que permite ao utilizador iniciar, controlar e terminar os ensaios, sem ter que se deslocar pelo
laboratorio.
Figura 6.1: Diagrama ilustrativo do funcionamento do laboratorio do IST
62

Figura 6.2: Imagem ilustrativa da instalacao presente no laboratorio do IST
Estruturalmente, a instalacao do laboratorio e composta, como visıvel na figura 6.2, por duas camaras
de pleno, uma ligada ao ventilador e outra ao modelo, ligadas por uma conduta ao longo da qual existe
uma zona preenchida por favos de mel, na tentativa de uniformizar o escoamento, e uma tubeira calibrada
para a medicao de caudal. A camara de pleno dois, que esta conectada ao ventilador, tem como intuito
minimizar as oscilacoes de pressao durante os ensaios em regime variavel.
Atraves da figura 6.3, e possıvel visualizar a fase de preparacao da camara de pleno para a montagem
do modelo, bem, como o momento em que a turbina ja esta conectada ao pleno, por meio de ligacoes
aparafusadas.
(a) (b)
Figura 6.3: Montagem da turbina no pleno. (a) Preparacao para montagem. (b) Turbina montada
6.1.1 Valvula de Fecho rapido
Tal como ja referido ao longo deste documento, a valvula de fecho rapida nao sera utilizada na
fase de ensaios realizada no ambito da presente dissertacao de mestrado. Contudo, todo o sistema foi
preparado para a montagem, apos a conclusao dos ensaios.
Assim, apresenta-se na figura 6.4 todo o sistema de controlo das valvulas projetado e concebido
durante a presente dissertacao.
63

(a) (b)
Figura 6.4: Quadro de comando das valvulas. (a) Vista exterior. (b) Vista Interior
Na figura da direita, e possıvel distinguir a esquerda os 6 controladores FESTO CMMO dos atuadores
FESTO EPCO-25-75 (3 atuadores por valvula e um controlador para cada atuador) e tambem o PLC
OMRON CP1E, onde sao feitas todas as ligacoes e que supervisionara todo o sistema de valvulas,
desde o seu funcionamento ao envio de mensagens de emergencia para a unidade xPC Target do IST.
Neste caso, devido a quantidade de portas utilizadas exceder a capacidade base do automato, foram
necessarias duas unidades de expansao. Para alem disso, e ainda visıvel a fonte de alimentacao deste
sistema, no canto superior direito.
Na figura da esquerda, e possıvel ver-se a caixa onde esta instalado todo o sistema, sendo que esta
caixa dispoes de botao de emergencia, bem como de ecras que permitem visualizar a velocidade de
rotacao da turbina.
Este sistema apresenta uma robustez muito elevada, aproximando este sistema de controlo do nıvel
industrial pela elevada fiabilidade e durabilidade que apresenta. Estas caracterısticas sao especialmente
importantes, tendo em conta o plano inicialmente tracado, que consistia em operar a turbina remotamente.
6.2 Instrumentacao
6.2.1 Pressao
Para garantir a fiabilidade e interesse dos resultados obtidos a partir dos ensaios, e crucial medir
correta e precisamente a pressao. Desse modo, estabeleceram-se diferentes pontos de medicao de
pressao na turbina, no pleno, na conduta e na atmosfera. Ao todo tem-se 24 tomadas de pressao, sendo
que cada ponto de medicao tem 4 tomadas, ou seja, existem 6 pontos de medicao com 4 tomadas cada.
Antes de se iniciarem os ensaios, e de extrema importancia a calibracao de todos e quaisquer
sensores. No caso dos sensores de pressao, esta calibracao e mais demorada, dado que foram
64

utilizados sensores de pressao com diferentes gamas de medicao, consoante o ponto ao qual se
destinam. Assim, nao foi possıvel fazer a calibracao de todos os sensores de pressao simultaneamente,
tendo sido necessaria, inclusivamente, a construcao de um manometro de grandes dimensoes, que
permitisse uma diferenca de pressao de mais de 1,6 m de H2O. Na figura 6.5, apresentam-se o
manometro construıdo e o micromanometro Betz utilizados durante as calibracoes.
(a) (b)
Figura 6.5: Manometros utilizados na calibracao dos sensores de pressao. (a) Manometro construıdo no IST. (b)Micromanometro Betz
Para alem de medir a pressao nos varios pontos da instalacao, e tambem importante medir a pressao
atmosferica a qual se realizou cada ensaio. Para esse efeito e durante os ensaios no IST, utilizou-se um
sensor de pressao TESTO 511, previamente utilizado em [17]. Contudo, no sentido de preparar todo
o circuito para a operacao no Mutriku, instalou-se ainda um circuito arduino com um sensor BMP280
que permite a medicao da temperatura ambiente e pressao atmosferica, sendo estes dados enviados
diretamente para o computador mestre, atraves do MATLAB. Na figura 6.6 apresenta-se este ultimo
circuito.
Figura 6.6: Circuito de medicao de temperatura ambiente e pressao atmosferica atraves de um circuito arduinocom sensor BMP280
65

Na tabela 6.1, apresentam-se todos os sensores utilizados, respetivos pontos de medicao e curvas
de calibracao. Para alem disso, apresenta-se na figura 6.7 a caixa de ligacao dos sensores, onde se
encontram todos os sensores de pressao e respetivas fontes de alimentacao, totalmente projetada e
produzida no IST, no ambito desta dissertacao.
Tabela 6.1: Pontos, Sensores e curvas de calibracao dos sensores de pressao
No. Ponto de Medicao Referencia Curva de Calibracao
1 Turbina - Apos as pas doestator Furness FC 04112284 p = 682, 29Uv
2 Turbina - Difusor de Saıda Furness FC 04112284 p = 682, 29Uv
3 Camara de Pleno HoneywellHSCDNBN-010MD-DA5 p = 507, 15Uv − 1206, 4
4 Conduta - Antes daTubeira
HoneywellHSCDNBN-010ND-DA5 p = 1265, 4Uv − 3171
5 Conduta - Depois daTubeira
HoneywellHSCSNBN-001PD-DAA5 p = 3534, 4Uv − 8842, 4
Figura 6.7: Caixa de ligacao dos sensores de pressao, com transformadores de sinal e fontes de alimentacao
6.2.2 Temperatura e Humidade
A medicao da temperatura ambiente e da humidade esta diretamente ligada com a determinacao da
massa especıfica (ρ) do ar, razao pela qual estes valores sao bastante importantes.
Durante os ensaios no laboratorio do IST, utilizou-se um sensor TESTO 175H1 para a determinacao
destas variaveis, mas tal como aconteceu para as medicoes de pressao, acautelou-se a operacao no
Mutriku com um sensor diferente. Neste caso, para alem do circuito BMP280, previamente apresentado,
que permite a medicao destes parametros, utilizou-se ainda um circuito arduino com um sensor DS18B20
(respeita norma IP68) apresentado na figura 6.8.
66

Figura 6.8: Circuito de medicao de temperatura ambiente atraves de um circuito arduino e sensor DS18B20
6.2.3 Binario e Velocidade de Rotacao
Para os ensaios iniciais, utilizou-se um medidor de binario de atrito da marca Vibro-Meter, com
capacidade para medir ate 400 Nm, apresentado na figura 6.9. Para alem de medir o binario, este sensor
permite tambem a medicao da velocidade de rotacao, variando a voltagem de saıda entre -10V e 10V.
Figura 6.9: Medidor de binario e velocidade de rotacao
Tal como acontece com os sensores de pressao, tambem o sensor de binario, tanto na sua vertente
de medicao de binario como na vertente de velocidade de rotacao, tem de ser devidamente calibrado.
Para esse efeito, utiliza-se um dispositivo, apresentado na figura 6.9, que permite a imposicao de uma
carga na ponta de um braco cujo cumprimento e conhecido. Deste modo, uma vez que se conhece a
forca imposta e o braco da mesma, e possıvel relacionar o binario imposto com a voltagem de saıda do
sensor, estabelecendo-se uma curva de calibracao.
As curvas de calibracao variam ao longo do tempo devido ao tempo de operacao e impactos sofridos
no sensor, pelo que esta curva deve ser refeita sempre que se inicia uma bateria de ensaios.
As tensoes impostas pelo sensor de binario sao transmitidas a uma placa de aquisicao de dados,
tambem apresentada na figura 6.10, que nao so dispoes de ecras LCD para visualizacao imediata
67

das variaveis, como tambem permite a transmissao destes valores ate a placa de aquisicao central do
sistema, apresentada mais a frente.
(a) (b)
Figura 6.10: (a) Calibracao do sensor de binario. (b) Placa de aquisicao do sensor de binario
As curvas de calibracao obtidas apresentam-se na tabela 6.2.
Tabela 6.2: Curvas de Calibracao do sensor de binario
Binario T [Nm] = 39, 902Uv + 0, 4632Velocidade de Rotacao Ω[rpm] = 496, 21Uv + 5, 3574
6.2.4 Caudal Volumico
A medicao do caudal volumico e feita recorrendo a uma rotina MATLAB, cujos valores de entrada sao
as medicoes de pressao feitas antes e depois da tubeira.
6.3 Procedimento de ensaios experimentais
No ambito desta tese e devido aos sucessivos atrasos, decorrentes da fase de projeto, producao e
montagem, os ensaios realizaram-se unica e exclusivamente em regime permanente, parametrizando-se
o gerador para um controlo em velocidade de rotacao. Os restantes ensaios, relativos ao regime variavel,
serao feitos posteriormente.
A parametrizacao do gerador seguiu o processo ja implementado e explicado em [13].
6.3.1 Ensaio para a obtencao de curvas de funcionamento
Nestes ensaios, o objetivo principal e a obtencao de curvas do tipo f(η) = φ, ou seja, curvas de
funcionamento da turbina, que permitem obter o rendimento da turbina para um determinado coeficiente
de caudal (φ).
O procedimento destes ensaios e bastante simples, sendo primeiramente fixa a velocidade de rotacao
do gerador num valor pretendido. Posteriormente, e variada a velocidade do ventilador para uma gama
de valores sendo que, para cada velocidade do ventilador, sao obtidos os valores de pressao na conduta
68

e no modelo, bem como os valores de binario, temperatura ambiente, humidade e pressao atmosferica,
a partir dos quais sera possıvel obter a curva desejada.
O controlo da velocidade do gerador e ventilador bem como o controlo da aquisicao de dados e
feito recorrendo ao computador xPC Target e escravo, respetivamente, que correm ambos o software
MATLAB/Simulink, que atua como interface entre o utilizador e o sistema.
6.3.2 Ensaio de binario de atrito
O binario de atrito do modelo pode ser obtido a partir de dois ensaios totalmente diferentes.
No primeiro tipo de ensaios, ao qual se da o nome de ensaio de binario de atrito, obtem-se o valor
do binario para diferentes valores de velocidade, sendo esses valores posteriormente colocados num
grafico f(T ) = Ω(t). Obtido o grafico, faz-se passar uma linha de tendencia polinomial cubica, pelos
pontos obtidos, que nos transmite o valor do binario de atrito.
Num segundo caso, utiliza-se o ensaio de decaimento. Este e tambem um procedimento simples
que assenta na obtencao dos valores do binario, para o intervalo de tempo de tempo entre o corte de
energia ao gerador e a paragem do sistema, ou seja, a velocidade do gerador e fixa e apos o corte de
energia ao gerador, mede-se o tempo ate a paragem total e o binario nesse intervalo. Os dados obtidos
deste ensaio, sao depois trabalhados, com a ajuda de funcoes de ajustamento de curvas presentes no
software MATLAB, para a obtencao do valor do binario de atrito.
6.3.3 Ensaio de embalamento
Este ensaio permite conhecer qual a velocidade de embalamento da turbina, para uma determinada
velocidade do ventilador e, consequentemente, para um determinado coeficiente de caudal (Φ) e
coeficiente de potencia (Π).
Neste caso, o gerador nao e atuado, sendo fixa a velocidade do ventilador. O sistema auto-arranca
e acelera ate uma velocidade estavel, sendo nesse monto obtidos os dados de pressao, temperatura
e binario. A partir desses dados, e possıvel calcular os coeficientes mencionados e estabelecer uma
relacao entre estes e a velocidade de rotacao. Este processo e repetido para diversas velocidades do
ventilador.
6.4 Analise de Resultados
Nesta seccao apresentam-se os resultados obtidos a partir da bateria de ensaios inicial realizada no
laboratorio do IST, bem como a respetiva analise dos mesmos.
6.4.1 Binario de Atrito
O binario de atrito representa o valor de binario que tem de ser vencido para que o veio da maquina
comece a rodar e tem duas proveniencias distintas, sendo elas o atrito nas chumaceiras e o binario
69

aerodinamico.
O atrito nas chumaceiras (Tchum) considera-se aproximadamente constante e unicamente dependente
da instalacao em si e nao da velocidade de rotacao a que o modelo se encontra. Este valor pode ou nao
ser significativo, contudo, para o caso corrente, existem 3 chumaceiras auto-lubrificantes, pelo que e de
esperar que o valor seja ainda consideravel.
Tchum ≈ c. (6.1)
No caso do atrito aerodinamico (Taero), este e um valor dependente da turbina e cuja magnitude se
espera que aumente quadraticamente com a velocidade de rotacao, para numeros de Reynolds, Re,
suficientemente elevados.
Tat aero = b(Ω(t))2. (6.2)
Assim, uma vez que o binario de atrito e composto por estes dois efeitos, e possıvel concluir:
Tatrito = c+ bΩ(t)2. (6.3)
sendo que os proximos dois ensaios tem como unico objetivo a definicao do valor das constantes
experimentais c e b.
O valor determinado pelos ensaios e de extrema importancia, nao so para o conhecimento do
funcionamento do prototipo, bem como para a correcao dos dados obtidos dos ensaios de rendimento/curva
de funcionamento.
Os dados obtidos a partir do sensor de binario tem de ser sempre corrigidos por um fator influenciado
por dois valores, o binario de atrito e o binario equivalente ao zero do sensor, que representa a voltagem
de saıda do sensor, quando este se encontra sem carga, ou seja, sem que o gerador ou o modelo
estejam em funcionamento. Uma vez que o zero do sensor e obtido no inıcio de cada ensaio, torna-se
crucial realizar os ensaios necessarios para estabelecer o valor do binario de atrito.
6.4.1.1 Ensaio de Binario de Atrito
De acordo com a seccao anterior, para realizar este ensaio foram fixadas, em diferentes momentos,
diferentes velocidades de rotacao do gerador, para as quais se mediu o binario lido pelo sensor e
correspondente velocidade de rotacao. Destes ensaios resultou o grafico apresentado na figura 6.11.
Deste grafico e atraves da imposicao de uma linha de tendencia polinomial, e possıvel retirar o valor
das constantes b e c do binario de atrito. Os termos de quarto, terceiro e segundo grau sao desprezaveis
face aos restantes, pelo que nos restam o termo constante, representativo do atrito nas chumaceiras, e
o termo quadratico, representativo do atrito aerodinamico.
Tatrito = 1, 0354 + 2e− 6 Ω2(t). (6.4)
70

Figura 6.11: Resultados ensaio binario de atrito
Neste caso, e possıvel reparar que a distribuicao dos pontos segue relativamente bem a curva imposta,
embora seja evidente alguma dispersao nos pontos. Esta esta muito relacionada com a variacao da
voltagem de saıda do medidor de binario instalado.
Para este modelo e para os ensaios realizados no ambito deste trabalho, o binario maximo medido
foi de cerca de 35 Nm o que, se olharmos para a capacidade do medidor de binario, representa menos
de 10% da sua capacidade, sendo muito recomendavel a utilizacao de sensores de menor capacidade.
Contudo, nao existia disponibilidade para aquisicao de material deste tipo e o unico sensor que respeitava
esta necessidade estava em uso, pelo que se manteve esta unidade em funcionamento. Assim, ha que
ter em conta que, cada 1 Volt de saıda do sensor representa 40 Nm, mais do que o maximo medido,
pelo que pequenas variacoes na saıda, que sao absolutamente normais, representam desvios muito
consideraveis para a quantidade medida.
Explicadas as variacoes do valor do binario nestes ensaios e dado que nada mais foi possıvel fazer
para mitigar este efeito, seguiu-se o ensaio de decaimento, cuja finalidade e comprovar o valor para o
binario de atrito obtido pelo ensaio explicitado neste capıtulo.
6.4.1.2 Ensaio de decaimento
De acordo com a informacao apresentada na seccao anterior, o ensaio de decaimento foi feito em
varias ocasioes e para varios valores de velocidade de rotacao, apresentando-se neste caso um grafico
de decaimento, obtido a partir de uma velocidade Ω = 1050 rpm. De destacar que se obtiveram 3 valores
de velocidade de rotacao por segundo e que, o resultado partiu da media desses valores. Para obter
os resultados pretendidos, a partir deste grafico, e primeiramente necessario contextualizar o problema
fısica e matematicamente.
Em primeiro lugar, importa definir o que e momento de inercia, dado pela expressao 6.2:
71

Figura 6.12: Resultados ensaio de decaimento
Tatrito = IdΩ(t)
dt. (6.5)
Conhecendo a equacao 6.2 e a partir de 6.5, conclui-se que:
IdΩ(t)
dt= c+ bΩ2(t). (6.6)
Esta equacao, depois de alguma manipulacao algebrica e para um intervalo de tempo [t0; t] resulta em:
I√cb
[arctan (Ω
√b
c)− arctan(Ω0
√b
c)
]= t− t0. (6.7)
Sabendo isto e conhecendo 3 pontos do grafico, e possıvel obter os coeficientes c e b. Contudo, e
necessario conhecer de antemao o momento de inercia do sistema, que neste caso, recorrendo a
ferramenta de analise do software CAD Solidworks, se conhece ser 1,02 kgm2.
Assim, do grafico acima apresentado resultou:
Tatrito = 1, 08 + 1, 32e− 5 Ω2(t). (6.8)
Deste resultado e comparando com o resultado obtido no ensaio de binario de atrito, pode concluir-se
que o valor do atrito das chumaceiras obtido nos dois ensaios e semelhante, mas o mesmo nao acontece
para o atrito aerodinamico. Esta disparidade esta intimamente relacionada, com o facto de no ensaio de
decaimento, o valor do binario de atrito ser demasiado pequeno para a escala do medidor de binario,
levando a grandes oscilacoes do valor medido. O mesmo efeito nao acontece, com este impacto, no
ensaio de binario de atrito, onde as velocidades sao mais elevadas.
72

6.4.2 Ensaio de Embalamento
Apresentam-se na tabela 6.3 os resultados do ensaio de embalamento realizado no modelo, para
velocidades entre 70 rads e 113 rads.
Tabela 6.3: Resultados ensaio de embalamento do modelo
Ω [rpm] 70 77 98 103 108 113Φ [-] 0.1346 0.133 0.1211 0.1188 0.1173 0.1149Ψ [-] 0.1168 0.1104 0.0953 0.0934 0.0908 0.0876
6.4.3 Ensaio de Rendimento
Tal como acontece para qualquer maquina deste tipo, o desempenho do modelo e caracterizada pela
sua curva de funcionamento, obtida a partir do que se designa vulgarmente, de ensaio de rendimento.
Neste caso, o ensaio de rendimento seguiu toda a metodologia especificada na secao 6.3.1, tendo-se
realizado ensaios para velocidades entre os 400 e os 1100 rpm. Analisando a seccao 2.8.4, estes
valores para a velocidade de rotacao ficam bastante abaixo da condicao de projeto, que previa 3000 rpm.
Este facto deveu-se a um problema tecnico grave, proveniente da montagem.
O alinhamento dos varios elementos da estrutura foi sempre, sem qualquer margem de duvida, a
maior preocupacao durante todo o projeto. Contudo e finalizada a fase de montagem, surgiram duvidas
quanto a um eventual desalinhamento, resultante dos erros de producao das chapas e consequentes
sucessivas retificacoes. Dado que a estrutura do modelo e demasiado compacta para permitir o
visionamento do seu interior quando em funcionamento, apenas foi possıvel dissipar as duvidas durante
os ensaios.
Desde logo, no primeiro ensaio de rendimento, constatou-se que o desalinhamento era efetivo e
consideravel, uma vez que nao so havia producao de ruıdo, devido ao contacto das pas em movimento
com a conduta de aco que as envolvia, como tambem se verificava o aquecimento dessa conduta. Visto
que a conduta apresenta uma espessura de 10 mm, fica patente que o contacto entre os componentes
rotativo e estatico era consideravel, sendo suficiente para aquecer a conduta, ao ponto de se tornar
impossıvel tocar na mesma.
A este problema, somou-se a criacao de desalinhamentos nos rolamentos. Uma vez que o veio
nao estava 100% alinhado, os rolamentos ficaram tambem eles desalinhados aumentando, muito
significativamente o atrito nos mesmos, o que explica o elevado valor da constante c presente na seccao
6.4.1.
Durante os ensaios, tentou-se ao maximo mitigar todos estes problemas, tendo-se levado a turbina ao
maximo possıvel de velocidade de rotacao, por forma a conseguir obter dados suficientes para possibilitar
a analise dos resultados.
Dos ensaios de rendimento realizados, obtiveram-se as seguintes curvas de funcionamento, ilustradas
na figura 6.13.
Dos graficos apresentados, e possıvel concluir que, tal como era esperado, os pontos adimensionalizados
estao bem distribuıdos, ou seja, por exemplo no grafico de rendimento em funcao do coeficiente de
73

(a)
(b)
(c)
Figura 6.13: Curvas de funcionamento do modelo para diferentes velocidades.
74
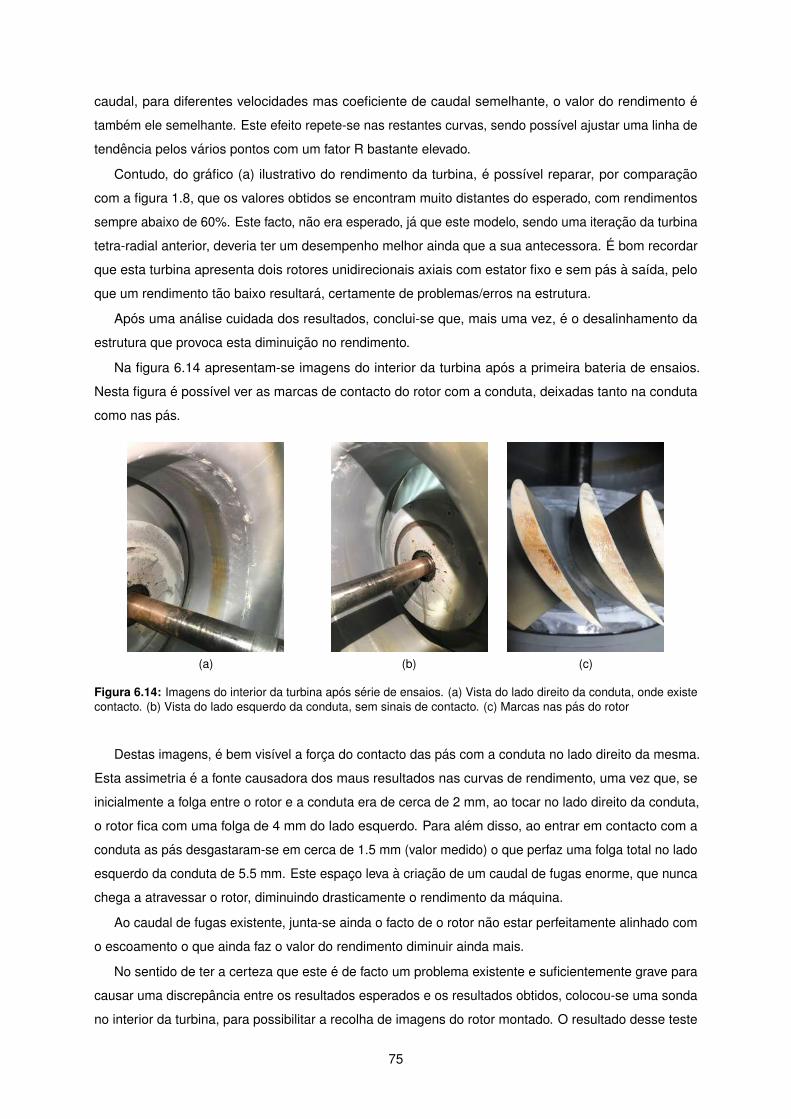
caudal, para diferentes velocidades mas coeficiente de caudal semelhante, o valor do rendimento e
tambem ele semelhante. Este efeito repete-se nas restantes curvas, sendo possıvel ajustar uma linha de
tendencia pelos varios pontos com um fator R bastante elevado.
Contudo, do grafico (a) ilustrativo do rendimento da turbina, e possıvel reparar, por comparacao
com a figura 1.8, que os valores obtidos se encontram muito distantes do esperado, com rendimentos
sempre abaixo de 60%. Este facto, nao era esperado, ja que este modelo, sendo uma iteracao da turbina
tetra-radial anterior, deveria ter um desempenho melhor ainda que a sua antecessora. E bom recordar
que esta turbina apresenta dois rotores unidirecionais axiais com estator fixo e sem pas a saıda, pelo
que um rendimento tao baixo resultara, certamente de problemas/erros na estrutura.
Apos uma analise cuidada dos resultados, conclui-se que, mais uma vez, e o desalinhamento da
estrutura que provoca esta diminuicao no rendimento.
Na figura 6.14 apresentam-se imagens do interior da turbina apos a primeira bateria de ensaios.
Nesta figura e possıvel ver as marcas de contacto do rotor com a conduta, deixadas tanto na conduta
como nas pas.
(a) (b) (c)
Figura 6.14: Imagens do interior da turbina apos serie de ensaios. (a) Vista do lado direito da conduta, onde existecontacto. (b) Vista do lado esquerdo da conduta, sem sinais de contacto. (c) Marcas nas pas do rotor
Destas imagens, e bem visıvel a forca do contacto das pas com a conduta no lado direito da mesma.
Esta assimetria e a fonte causadora dos maus resultados nas curvas de rendimento, uma vez que, se
inicialmente a folga entre o rotor e a conduta era de cerca de 2 mm, ao tocar no lado direito da conduta,
o rotor fica com uma folga de 4 mm do lado esquerdo. Para alem disso, ao entrar em contacto com a
conduta as pas desgastaram-se em cerca de 1.5 mm (valor medido) o que perfaz uma folga total no lado
esquerdo da conduta de 5.5 mm. Este espaco leva a criacao de um caudal de fugas enorme, que nunca
chega a atravessar o rotor, diminuindo drasticamente o rendimento da maquina.
Ao caudal de fugas existente, junta-se ainda o facto de o rotor nao estar perfeitamente alinhado com
o escoamento o que ainda faz o valor do rendimento diminuir ainda mais.
No sentido de ter a certeza que este e de facto um problema existente e suficientemente grave para
causar uma discrepancia entre os resultados esperados e os resultados obtidos, colocou-se uma sonda
no interior da turbina, para possibilitar a recolha de imagens do rotor montado. O resultado desse teste
75
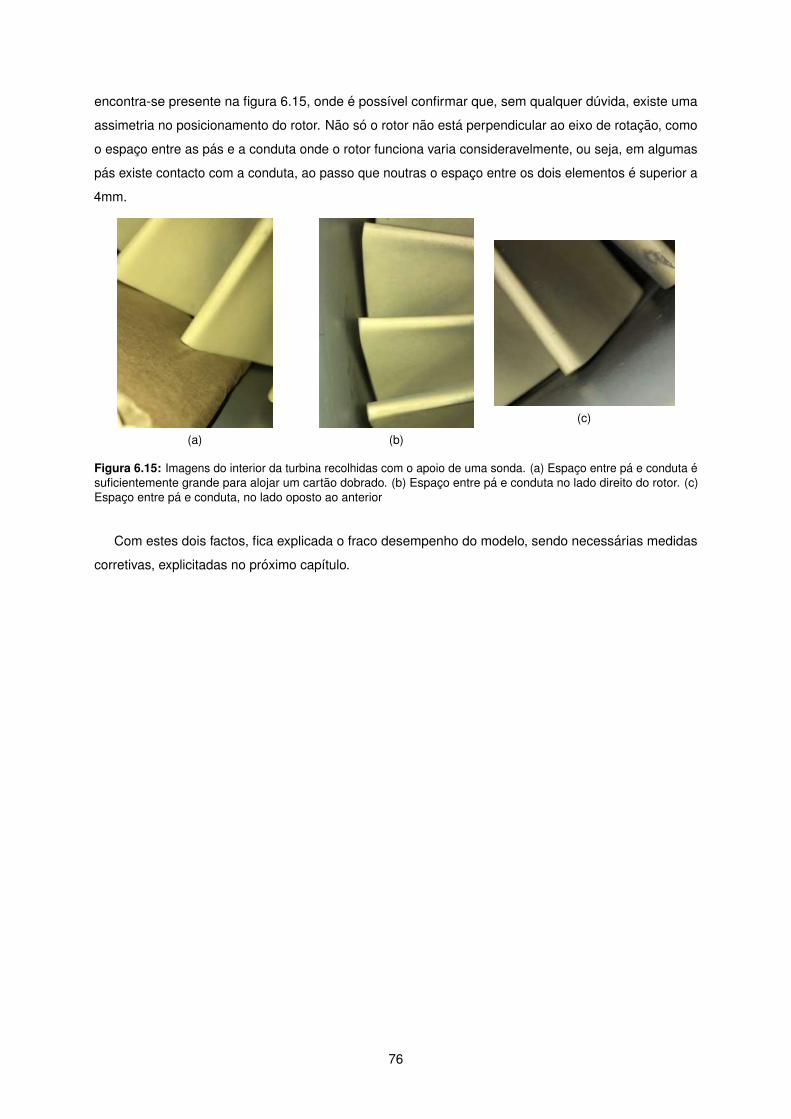
encontra-se presente na figura 6.15, onde e possıvel confirmar que, sem qualquer duvida, existe uma
assimetria no posicionamento do rotor. Nao so o rotor nao esta perpendicular ao eixo de rotacao, como
o espaco entre as pas e a conduta onde o rotor funciona varia consideravelmente, ou seja, em algumas
pas existe contacto com a conduta, ao passo que noutras o espaco entre os dois elementos e superior a
4mm.
(a) (b)
(c)
Figura 6.15: Imagens do interior da turbina recolhidas com o apoio de uma sonda. (a) Espaco entre pa e conduta esuficientemente grande para alojar um cartao dobrado. (b) Espaco entre pa e conduta no lado direito do rotor. (c)Espaco entre pa e conduta, no lado oposto ao anterior
Com estes dois factos, fica explicada o fraco desempenho do modelo, sendo necessarias medidas
corretivas, explicitadas no proximo capıtulo.
76

Capıtulo 7
Conclusoes e Trabalho Futuro
Foi projetado, construıdo, montado e ensaiado um modelo de uma turbina tetra-radial com uma
potencia de 30 kW, equipado com dois rotores axiais unidirecionais e valvulas auto-retificadoras. Este
modelo foi ensaiado no laboratorio do IST, numa instalacao de 55 kW de potencia. O dispositivo em
estudo partiu de uma versao inicial da turbina tetra-radial, ja instalada e testada, aliada a uma patente
que guiou a fase de projeto de toda a estrutura. Este modelo simplificou alguns aspetos da construcao
da turbina anterior, tendo-se como objetivo nao so a diminuicao dos custos de producao como tambem o
aumento do rendimento da maquina. Este projeto durou cerca de 2 anos a ser concluıdo e envolveu
inumeras etapas ate que se pudesse obter os resultados aqui apresentados.
Para alem de ensaiado no laboratorio do IST, o prototipo foi preparado para ensaios futuros na central
de energia das ondas do Mutriku, no Paıs Basco em Espanha. Esta preparacao envolveu o desenho e
programacao de inumeros sistemas de controlo, bem como a concecao de todo o sistema de valvulas
descrito neste documento.
Os problemas durante a fase de montagem, com erros de producao que obrigaram a sucessivas
reparacoes, aliados a elevada complexidade da estrutura, resultaram por um lado na derrapagem do
tempo previsto para a conclusao do projeto e por outro num aumento do risco de problemas durante a
operacao da turbina.
Esse risco veio a confirmar-se e os resultados obtidos acabaram fortemente influenciados pelo
desalinhamento da estrutura. Apenas se conseguiu operar a turbina a um maximo de 30% da sua
velocidade de projeto e o seu rendimento, em vez de ser superior a 80%, que era o mınimo expectavel,
ficou-se pelos 60%. Este facto revelou serem necessarias restruturacoes profundas na estrutura da
turbina e obrigou ao adiamento de novas fases de ensaio, ate que o problema esteja resolvido.
Deste trabalho, foi possıvel observar que a estrutura inicialmente projetada cumpre todos os requisitos,
mas apresenta dificuldades consideraveis durante a montagem, pelo facto de ser muito compacta.
Esta caracterıstica impossibilitou tambem a observacao do interior do modelo quando este estava em
funcionamento, o que obrigou a uma inspecao visual profunda, a fim de se conhecerem as eventuais
causas dos problemas observados.
O modelo final, embora necessite restruturacao parcial, apresenta uma robustez muito elevada e
77

esta perfeitamente apetrechado para ser submetido a condicoes de teste mais agressivas e proximas da
realidade, como acontece na central do Mutriku.
7.1 Trabalho Futuro
Os proximos passos a seguir ja foram previamente preparados, uma vez que estao intimamente
relacionados com a retificacao da estrutura atual.
Sera necessario desmontar e reparar o rotor bem como alinhar o veio, atraves da producao de uma
nova chapa que esteja devidamente alinhada com as restantes. Para alem disso, sera importante e
necessario verificar que a unica fonte de problemas e o desalinhamento da estrutura, ou seja, que nao
existem erros de producao e projeto nas pas ou condutas previamente projetadas. Para fazer esta
analise, sera necessario contruir um difusor axial que permita, em primeiro lugar, verificar o desempenho
do estator e conduta de entrada.
Caso esse ensaio conclua que estes dois elementos cumprem os requisitos necessarios, sera
necessario ensaiar o modelo com o rotor, mas com saıda axial, por forma a garantir que o rotor ja se
encontra em perfeitas condicoes, seguindo-se o ensaio da estrutura completa.
Esta bateria de ensaios permitira despistar todo e qualquer problema resultante da estrutura, por
forma a assegurar, tanto quanto possıvel, que na proxima fase de ensaios os resultados estejam de
acordo com o previsto.
A resolucao destes problemas, permitira aumentar a velocidade de rotacao da maquina, o que
possibilitara o controlo atraves do binario eletromagnetico, ensaios em regime variavel e, posteriormente,
a integracao do sistema de valvulas.
78

Bibliografia
[1] A. F. O. Falcao. Wave energy utilization: A review of the technologies. Renewable and sustainable
energy reviews, 14(3):899–918, 2010.
[2] Y. Masuda. Ocean wave electric generator, Aug. 31 1965. US Patent 3,204,110.
[3] A. F. O. Falcao and J. C. C. Henriques. Oscillating-water-column wave energy converters and air
turbines: A review. Renewable Energy, 85:1391–1424, 2016.
[4] A. F. O. Falcao. Historical aspects of wave energy conversion. Comprehensive Renewable Energy,
8(2):7–9, 2012.
[5] M. Hannon, J. Griffiths, A. Vantoch-Wood, M. Carcas, S. Bradley, R. Boud, and S. Wyatt. Marine
energy (world energy resources 2016). pages 722–798, 10 2016. doi: 10.13140/RG.2.2.24836.
73607.
[6] C. Perez-Collazo, M. M. Jakobsen, H. Buckland, and J. Fernandez Chozas. Synergies for a wave-
wind energy concept. In Proceedings of the European offshore wind energy conference, Frankfurt,
Germany, volume 21, pages 1–10, 2013.
[7] G. Mørk, S. Barstow, A. Kabuth, and M. T. Pontes. Assessing the global wave energy potential.
In ASME 2010 29th International conference on ocean, offshore and arctic engineering, pages
447–454. American Society of Mechanical Engineers, 2010.
[8] A. F. O. Falcao. Modelling of Wave Energy Conversion. Instituto Superior Tecnico - Univ. de Lisboa,
2017.
[9] Technology characterization. https://hub.globalccsinstitute.com/publications/renewable-electricity-
futures-study-volume-2-renewable-electricity-generation-and-storage-technologies/95-technology-
characterization - Accessed: 2018-09-30.
[10] A. A. Wells. Wave energy apparatus, May 17 1983. US Patent 4,383,413.
[11] R. Curran and L. M. C. Gato. The energy conversion performance of several types of wells turbine
designs. Proceedings of the Institution of Mechanical Engineers, Part A: Journal of Power and
Energy, 211(2):133–145, 1997.
79

[12] I. A. Babintsev. Apparatus for converting sea wave energy into electrical energy, Dec. 2 1975. US
Patent 3,922,739.
[13] A. A. D. Carrelhas. Turbina bi-radial. Master’s thesis, Instituto Supeiror Tecnico - U. lisboa, Novembro
2017.
[14] R. Alcorn, A. Blavette, M. Healy, and A. Lewis. FP7 EU funded CORES wave energy project: a
coordinators’ perspective on the Galway Bay sea trials. Underwater Technology, 2014.
[15] A. F. O. Falcao, L. M. C. Gato, and E. Nunes. A novel radial self-rectifying air turbine for use in wave
energy converters. Part 2. Results from model testing. Renewable energy, 53:159–164, 2013.
[16] A. A. D. Carrelhas, A. R. Maduro, L. M. C. Gato, J. C. C. Henriques, and A. F. O. Falcao. Performance
of the self-rectifying biradial air turbine with fixed guide vanes arranged into concentric annular rows.
Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, August 2017.
[17] B. S. C. Lopes. Construcao e ensaio de um modelo de turbina de ar auto-retificadora de rotor duplo
para sistemas de aproveitamento de energia das ondas. Master’s thesis, Instituto Supeiror Tecnico -
U. lisboa, Novembro 2017.
[18] J. Melo. Projecto do difusor de uma turbina tetra-radial auto-rectificadora. Master’s thesis, Instituto
Supeiror Tecnico - U. lisboa, Julho 2016.
[19] L. M. C. Gato and D. N. Ferreira. Turbina de rotor duplo com valvulas retificadoras para o
aproveitamento de energia em escoamentos alternados bidirecionais, 2017. Patent draft.
[20] A. C. L. Paralta. Projecto duma turbina de rotor duplo axial com valvulas auto-rectificadoras para
conversores de energia das ondas. Master’s thesis, Instituto Supeiror Tecnico - U. lisboa, Julho
2017.
[21] L. M. M. Arruda. Projecto das pas directrizes e da conduta de ligacao de um novo tipo de turbina de
rotor duplo para conversao de energia das ondas. Master’s thesis, Instituto Supeiror Tecnico - U.
lisboa, Junho 2017.
[22] L. M. C. Gato, B. S. Lopes, D. N. Ferreira, A. A. D. Carrelhas, A. F. O. Falcao, and J. C. C. Henriques.
WETFEET Deliverable D.4.3. Global analysis of the selected turbine for the OWC, 2018.
[23] Z. Burton, G. L. Ingram, and S. Hogg. A literature review of low pressure steam turbine exhaust hood
and diffuser studies. Journal of Engineering for Gas Turbines and Power, 135(6):062001, 2013.
[24] S. Yoon, F. J. Stanislaus, T. Mokulys, G. Singh, and M. Claridge. A three-dimensional diffuser design
for the retrofit of a low pressure turbine using in-house exhaust design system. In ASME 2011
Turbo Expo: Turbine Technical Conference and Exposition, pages 2309–2319. American Society of
Mechanical Engineers, 2011.
[25] P. Stein, C. Pfoster, M. Sell, P. Galpin, and T. Hansen. Cfd modeling of low pressure steam turbine
radial diffuser flow by using a novel multiple mixing plane based coupling: Simulation and validation.
80

In ASME Turbo Expo 2015: Turbine Technical Conference and Exposition, pages V008T26A020–
V008T26A020. American Society of Mechanical Engineers, 2015.
[26] V. Brederode. Aerodinamica Incompressıvel. IST Press, 2014.
[27] F. Fay, J. Henriques, E. Robles, and M. Marcos. Review of control strategies for oscillating water
column wave energy converters. In Proceedings of the European Wave and Tidal Energy Conference,
Nantes, France, pages 6–11, 2015.
[28] Y. Hong, R. Waters, C. Bostrom, M. Eriksson, J. Engstrom, and M. Leijon. Review on electrical
control strategies for wave energy converting systems. Renewable and Sustainable Energy Reviews,
31:329–342, 2014.
[29] L. Wang, J. Isberg, and E. Tedeschi. Review of control strategies for wave energy conversion systems
and their validation: the wave-to-wire approach. Renewable and Sustainable Energy Reviews, 81:
366–379, 2018.
[30] A. F. O. Falcao, J. J. Candido, P. A. P. Justino, and J. C. C. Henriques. Hydrodynamics of the ips
buoy wave energy converter including the effect of non-uniform acceleration tube cross section.
Renewable energy, 41:105–114, 2012.
[31] J. C. C. Henriques, A. F. O. Falcao, R. Gomes, and L. M. C. Gato. Latching control of an owc
spar-buoy wave energy converter in regular waves. In ASME 2012 31st International Conference
on Ocean, Offshore and Arctic Engineering, pages 641–650. American Society of Mechanical
Engineers, 2012.
[32] E. B. Mackay, A. S. Bahaj, and P. G. Challenor. Uncertainty in wave energy resource assessment.
part 2: Variability and predictability. Renewable energy, 35(8):1809–1819, 2010.
[33] G. Karmiris and T. Tengner. Peak shaving control method for energy storage. ABB AB, Corporate
Research Center, Vasteras, Sweden, 2018.
[34] R. Valentino, E. Romeo, and D. Stevanoni. An experimental study on the mechanical behaviour of
two polyurethane resins used for geotechnical applications. Mechanics of Materials, 71:101–113,
2014.
[35] Processing guide. http://www.innovative-polymers.com/Casting-Guide-2016.pdf - Accessed: 2018-
09-30.
81

82
Apendice A
Producao Pecas de Resina
Tal como abordado e explicado nesta dissertacao, ao longo deste projeto recorreu-se em varias
situacoes a producao de pecas em resina de poliuretano compacto, como alternativa a maquinacao em
fresadoras ou maquinas CNC. No caso concreto deste modelo, existiam 102 pas do estator, 82 pas do
rotor e ainda 4 condutas que, no caso de se optar pela producao via maquinas CNC, implicariam um
aumento do custo de producao de mais de 100%. A tıtulo de exemplo, uma conduta maquinada de modo
a satisfazer os requisitos do projeto, implicaria um custo de mais de 12000 e, por oposicao aos cerca
de 15 edespendidos por peca de resina extraıda (cada conduta necessita de 8 pecas, num valor toral
aproximado de 120 e).
Por essa razao, a escolha da resina de poliuretano compacto como alternativa foi facil e foi feita numa
fase ainda muito embrionaria do projeto, onde nao havia qualquer peca encomendada.
O desafio principal prendeu-se, tal como referido anteriormente, com a elevada volumetria de algumas
pecas, o que acarreta desafios particularmente difıceis no que toca a concecao do molde. Acima disso,
este tipo de pecas nunca havia sido produzido no laboratorio do IST, o que aumentou a complexidade de
todo o processo de fabrico.
Uma vez que, ao aumentar a volumetria da peca a produzir, se aumenta a complexidade da producao
do molde e extracao da peca resultante, tentou-se, a todo o custo, manter as pecas a produzir o mais
pequenas possıvel, sendo para isso necessario dividir a conduta axissimetrica (360o) em 16 partes
(22.5o cada), que quando devidamente combinadas perfazem a conduta final.
Tendo em conta a divisao previamente mencionada, produziram-se durante esta dissertacao mais de
300 pecas em resina.
Para produzir os moldes destas pecas, e necessaria a producao de ”masters”que permitem a
producao dos moldes utilizados neste processo. Estas pecas sao maquinadas em maquinas CNC,
sendo necessaria uma peca por molde, ou seja, uma pa do estator, uma pa do rotor e uma parte (neste
caso 1/8) de cada conduta. De seguida, apresenta-se uma metodologia detalhada para a producao dos
moldes e respetivs pecas.
83

A.1 Metodologia
1. Analise das pecas a produzir e determinacao da sua volumetria.
2. Caso a volumetria de uma determinada peca seja muito superior a 120cm3, sera necessario dividir
a forma final em varias partes, para que seja possıvel extrair as pecas em resina com sucesso. Esta
divisao devera ser feita em x partes iguais, de modo a que, a partir de um unico molde se produzam
todas as pecas. A partir deste ponto sao conhecidas as pecas a extrair dos moldes, devendo-se
iniciar producao dos ”masters”que, sendo iguais as pecas a extrair dos moldes, permitirao a
construcao dos mesmos.
3. Neste ponto em que ja estao produzidos o master pode iniciar-se a producao dos moldes.
4. E necessario limpar cuidadosamente, com recurso a alcool ou acetona, o ”master”que se pretende
utilizar. Para alem disso, devem tapar-se com plasticina quaisquer orifıcios que a peca tenha, sob
pena de nao ser possıvel extrair a peca do molde
5. Deve planear-se cuidadosamente o molde a produzir. E importante garantir o sucesso da extracao
das pecas e, para isso, este passo e fundamental
6. Com recurso a papel cartonado (k-line) e cola quente, constroi-se a caixa onde o silicone do molde
sera vazado. O master e entao colocado na caixa, de acordo com o planeamento efetuado, e
vaza-se o silicone para a caixa, que devera estar num local seguro e fixa a uma estrutura que
impeca quaisquer movimentos. O tempo de cura do silicone e de cerca de 24h, nao sendo possıvel
mexer na caixa durante esse perıodo, sob pena de se inutilizar o molde em producao.
(a) (b)
Figura A.1: (a) Master colocado na caixa do molde. (b) Estrutura de fixacao da caixa e master
7. Depois de o silicone estar curado (e possıvel concluir que o molde esta pronto, quando o silicone
fica endurecido e perde o brilho na sua superfıcie livre), e retirada a peca master e pode iniciar-se
a producao de pecas em resina.
84

Figura A.2: Silicone em processo de cura
8. Com o molde vazio, e vazada a quantidade necessaria de resina para o molde, ate que este
transborde ligeiramente. No caso do poliuretano compacto, e necessario misturar dois componentes
A e B, em partes iguais
9. Apos o tempo de cura da resina, que e no mınimo 3h para as pecas mais pequenas, e possıvel
extrair a peca. Este processo requer atencao especial, uma vez que, uma extracao mal feita pode
inutilizar tanto a peca como o molde
Figura A.3: Peca Extraıda
10. E necessario esperar no mınimo 1h entre uma extracao e o vazamento de resina para a producao
de uma nova peca.
85

Figura A.4: Conduta de entrada teste composta por 6 pecas
86
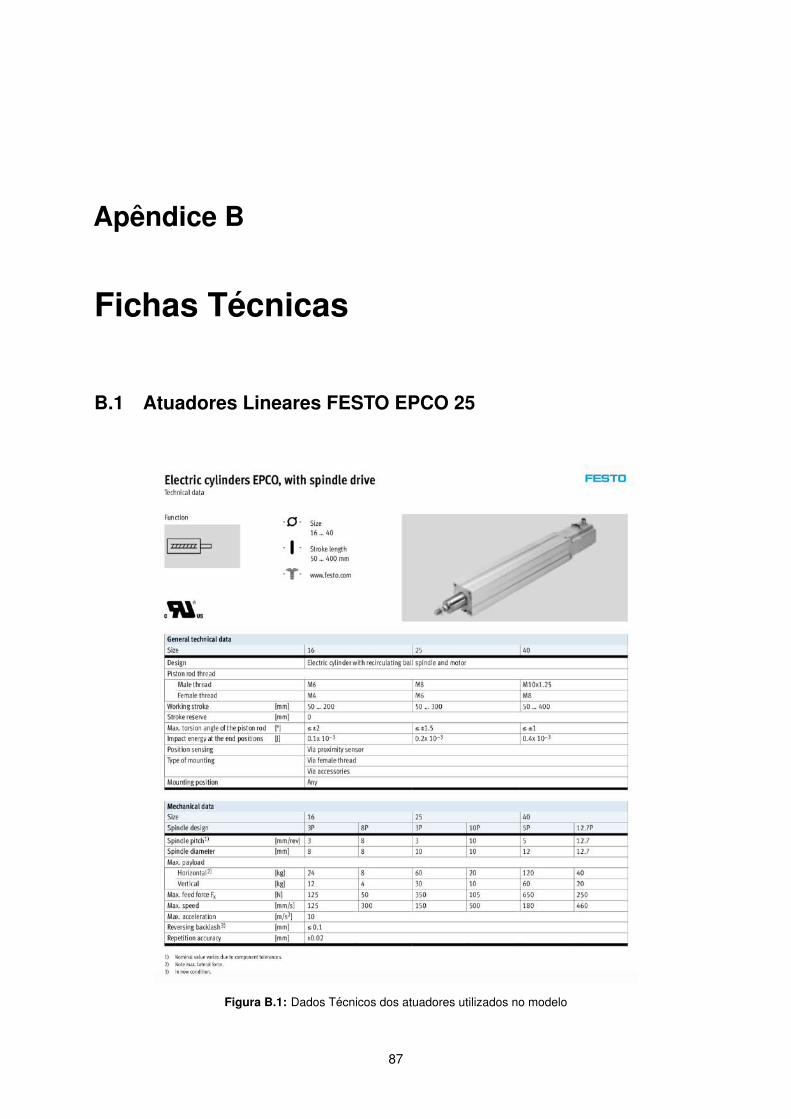
Apendice B
Fichas Tecnicas
B.1 Atuadores Lineares FESTO EPCO 25
Figura B.1: Dados Tecnicos dos atuadores utilizados no modelo
87
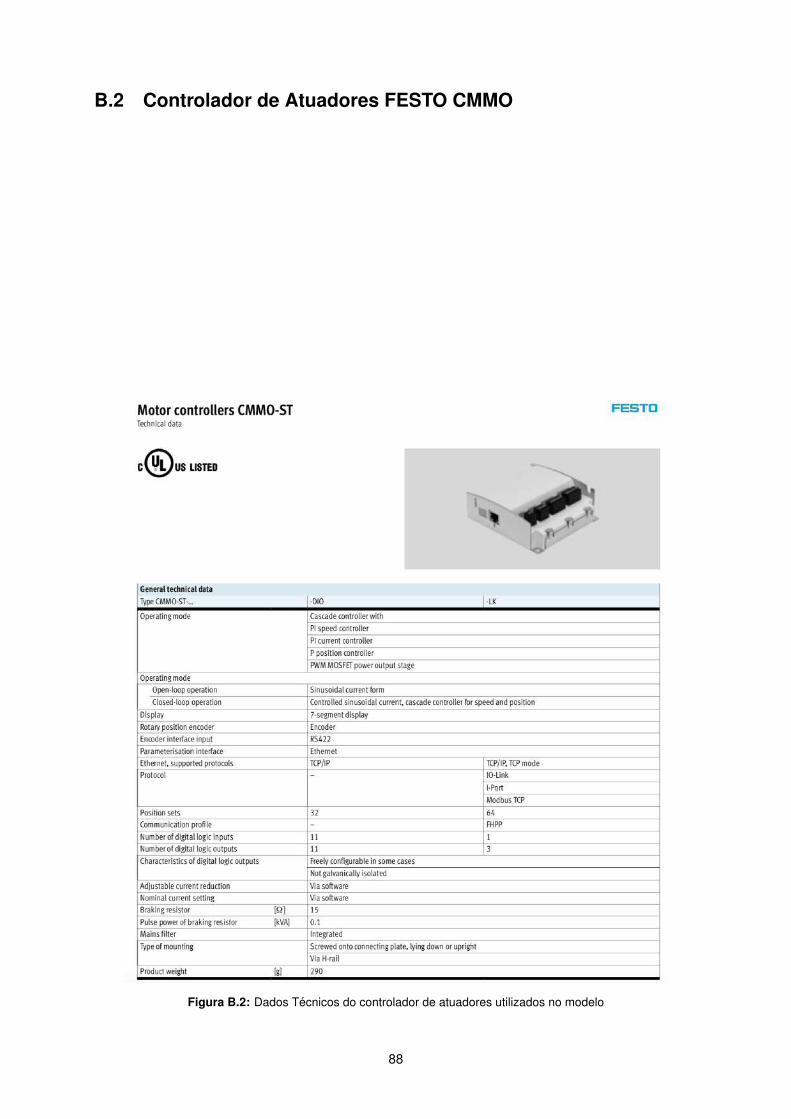
B.2 Controlador de Atuadores FESTO CMMO
Figura B.2: Dados Tecnicos do controlador de atuadores utilizados no modelo
88
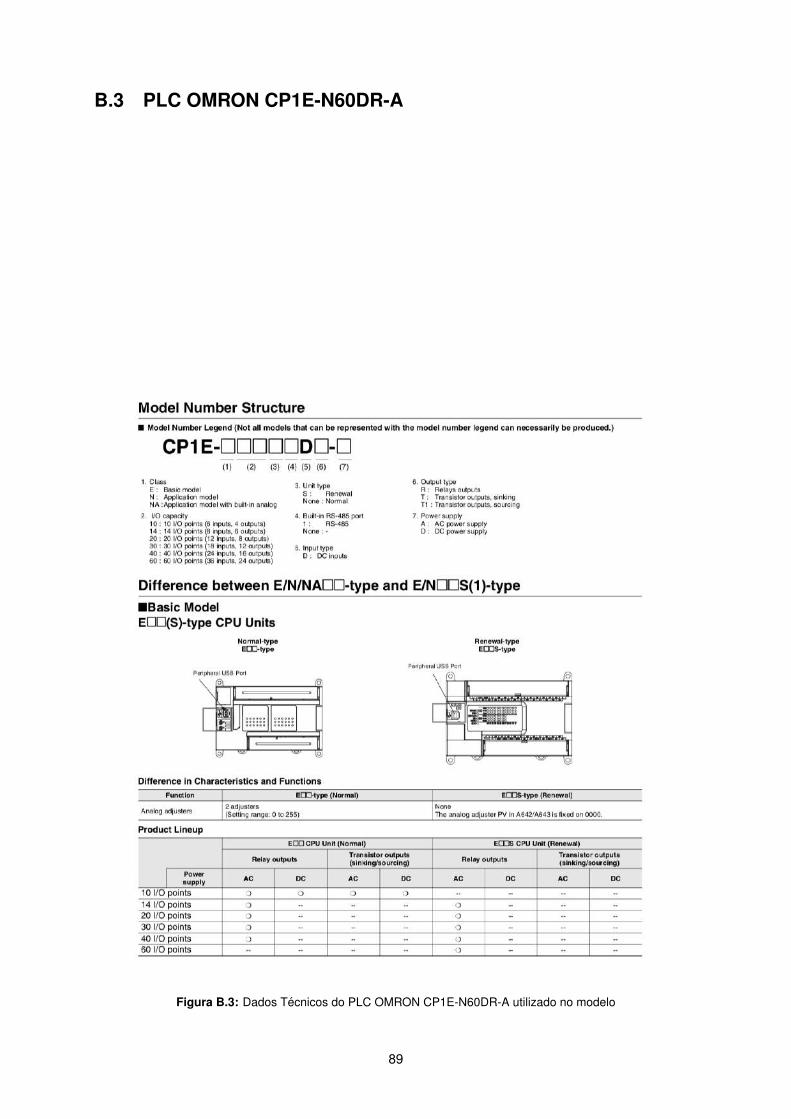
B.3 PLC OMRON CP1E-N60DR-A
Figura B.3: Dados Tecnicos do PLC OMRON CP1E-N60DR-A utilizado no modelo
89

B.4 SKF 22215E
Figura B.4: Dados Tecnicos do rolamento SKF 22215E utilizado no modelo
90
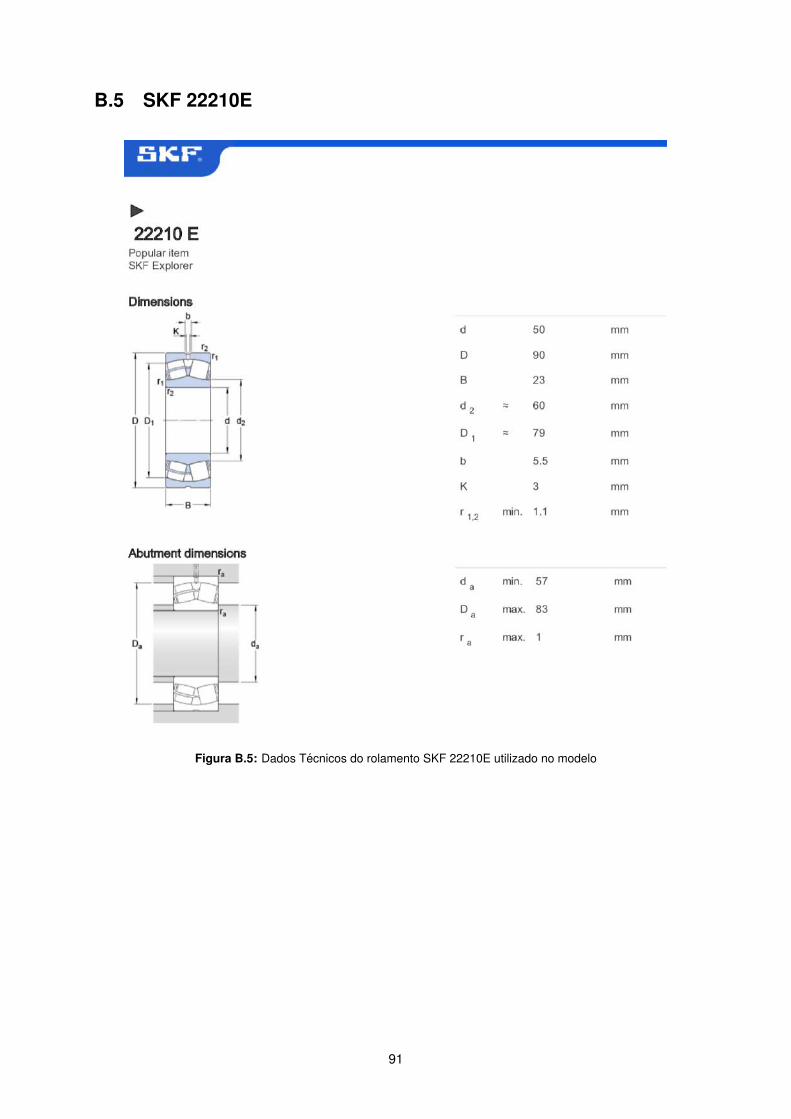
B.5 SKF 22210E
Figura B.5: Dados Tecnicos do rolamento SKF 22210E utilizado no modelo
91

Apendice C
Desenhos Tecnicos
C.1 Veio
92

Figu
raC
.1:
Des
enho
tecn
ico
dove
iodo
mod
elo
93

C.2 Desenho de Conjunto
94
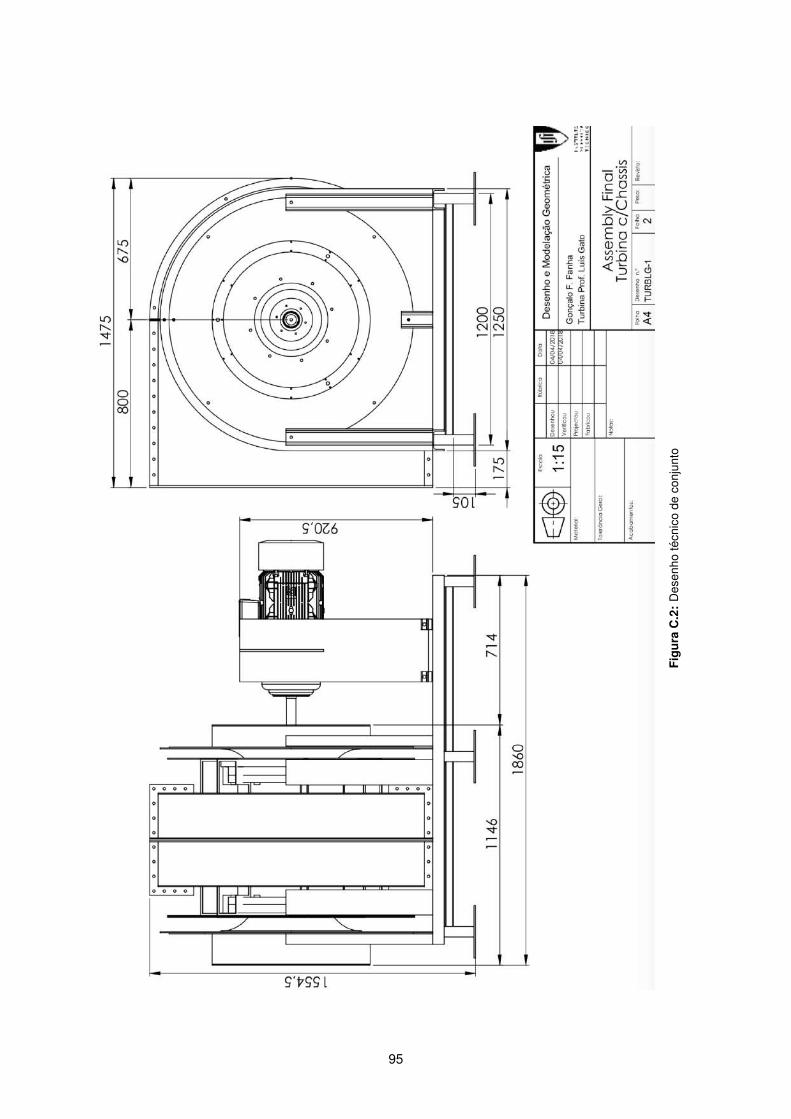
Figu
raC
.2:
Des
enho
tecn
ico
deco
njun
to
95

Apendice D
Analise de Erros
Qualquer sinal adquirido esta associado a incertezas que estao diretamente ligadas com todos os
erros cometidos aquando da medicao desse sinal. E possıvel dividir os erros causadores das incertezas
de um dado sinal em tres grupos distintos:
• Erros aleatorios
Cada ensaio e caracterizado por um conjunto de particularidades intrınsecas que o influenciam.
Assim, de ensaio para ensaio existem erros aleatorios, ou seja, explicaveis por nenhuma regra ou
logica pre-definida.
• Erros grosseiros
Durante um ensaio, por erro do responsavel que o estar a supervisionar ou por mau funcionamento
de algum instrumento de aquisicao de dados, podem ocorrer erros grosseiros, que serao identificados
com um pos-processamento cuidadoso.
• Erros sistematicos
Estes sao os unicos erros que se repetem durante toda uma bateria de testes. Neste caso, o erro
esta relacionado com um comportamento repetido por parte do utilizador ou erros provenientes da
calibracao dos instrumentos utilizados no decorrer dos ensaios.
D.1 Metodologia de Calculo
A metodologia seguida neste anexo esta de acordo com [13]. Uma variavel Y, determinada atraves de
n medicoes e seu processamento, e influenciada pelas incertezas individuais de cada uma das medicoes.
Nesse sentido, importa explicitar o modo de calculo da incerteza de uma medicao para que, a partir
desse momento, o calculo da incerteza de Y se torne apenas num processo matematico simples.
Para cada conjunto de dados obtidos durante um ensaio, e possıvel obter a sua media e o seu desvio
padrao, atraves de:
X =1
n
n∑n=1
xi, (D.1)
96

S =
[1
n− 1
n∑n=1
(xi − x)2
] 12
. (D.2)
Adotando a distribuicao t-Student para um intervalo de confianca de 90% e n¿60, e possıvel dfinir a
incerteza aleatoria
Ur(Xm) =t√nS. (D.3)
Na equacao previamente apresentada, t representa o tempo de amostragem e n o numero de amostras
retiradas. Para obter este valor, e necessario primeiramente filtrar o sinal obtido, para desacoplar o ruıdo
do sinal. Neste caso, a filtragem recorreu a filtros Savitzky-Golay.
Deste modo, recorrendo a metodologia apresentada em [13], e possıvel definir as incertezas aleatoria
e sistematica da variavel Y.
Ury =
√√√√ n∑n=1
(∂f
∂XnUr(Xn)
), (D.4)
Uby =
n∑n=1
∂f
∂Xn∆x1. (D.5)
Resultando uma incerteza aleatoria, dada por:
UY =√
(Ury)2 + (Uby)2 (D.6)
D.2 Resultados
Tendo em conta a metedologia previamente apresentada, e possıvel obter os resultado apresentados
na tabela D.1 que apresenta os erros para as curvas de funcionamento do modelo testado.
Tabela D.1: Resultados de incerteza, para as curvas de funcionamento
Ω Φ η uη[%]800 0,150 0,3217 14,95800 0,223 0,4778 13,83400 0,404 0,388 8,87400 0,501 0,370 9,561050 0,156 0,583 15,371050 0,108 0,309 17,441000 0,104 0,437 13,031000 0,119 0,386 15,86
97