Teoria do Controle.pdf
152
TEORIA DE CONTROLE Controle “Supervisionar e manter o processo em um determinado ponto de operação. Tomada de decisão, envia sinais de correção para os atuadores.” “Medir o valor da variável controlada e aplicar o valor conveniente a variável manipulada (sinal de correção) de modo a limitar o erro ou desvio.” Benefícios do controle bem realizado: diminuição de funções repetitivas, melhora de produtividade, diminuição de erros e perdas no processo. Introdução
-
Upload
marcio-mazeu -
Category
Documents
-
view
94 -
download
0
Transcript of Teoria do Controle.pdf

TEORIA DE CONTROLE
Controle
“Supervisionar e manter o processo em um determinado ponto de operação. Tomada de decisão, envia sinais de correção para os atuadores.”
“Medir o valor da variável controlada e aplicar o valor conveniente a variável manipulada (sinal de correção) de modo a limitar o erro ou desvio.”
Benefícios do controle bem realizado: diminuição de funções repetitivas, melhora de produtividade, diminuição de erros e perdas no processo.
Introdução

TEORIA DE CONTROLE
Exemplos de Sistemas de Controle -sistema de controle de velocidade -sistema de controle de robô -sistema de controle de temperatura -sistema de controle de posição -sistema de controle de seleção de peças
Hoje o Controle Automático, entre outras, estápresente: na indústria manufatureira (comando de máquinas), na indústria aeroespacial (sistemas automáticos inteligentes), na indústria automobilística (linha de produção), na indústria química e petroquímica (vazão, pressão, nível, temperatura, densidade, etc)
Introdução

TEORIA DE CONTROLE
Controle em Processo Discreto
“Tomada de decisão baseado em eventos. Abertura e fechamento de contatos, acionamentos, temporizações, sistemas de alarme e proteção. Indústria de fabricação por lote.”
Controle em Processo Contínuo
“Manter os valores dentro do ponto de operação. Envolve variáveis como temperatura, pressão, nível e vazão. Indústria química.”
Introdução

TEORIA DE CONTROLE
Exemplos de Sistemas de Controle de Processos Discretos
-Separação de Peças, Contagem de Peças por Lote, etc. -Controle a partir de Eventos.
Esteira Separadora de Caixas
Introdução

TEORIA DE CONTROLE
Exemplos de Sistemas de Controle de Processos Contínuos
-Controle de temperatura, vazão, nível, pressão, etc. -Controle Variáveis Analógicas.
Sistema de Controle de Nível
Introdução

TEORIA DE CONTROLE
Processo
“Trata-se do objetivo do sistema de automação, a finalidade.”
“Operação que evolui continuamente para atingir uma meta. Todas as ações são realizadas para se conseguir este objetivo.”
Sistema
“Combinação de componentes que atuam em conjunto com um objetivo. Não necessita ser algo físico. Sistema a Controlar é conhecido como Planta.”
Introdução

TEORIA DE CONTROLE
Variável Controlada
“Grandeza que é medida e controlada”
Variável Manipulada
“Grandeza variada pelo controle de modo a afetar a variável controlada”
Distúrbio
“Perturbação que afeta de modo adverso a variável controlada. Ruído.”
Introdução

TEORIA DE CONTROLE
Exemplo: Controle de Temperatura de um Tanque. Objetivo manter a temperatura da água a 35oC. O controle atua aquecendo por meio do aumento da vazão de vapor que circula em uma serpentina.
+- CONTROLE PLANTA
SENSOR
PONTO DE SOMA
X YC
R
+ +
D
E
Elementos de uma Malha de Controle

TEORIA DE CONTROLE
X – sinal de referência (set-point). No exemplo 35oC. Y – variável controlada. Temperatura da água do tanque. C –variável manipulada. Vazão do Vapor. E –sinal de erro. Diferença entre o medido e o desejado. R –sinal medido (sinal de retroação). Valor do sensor. D – distúrbio do sistema. Temperatura ambiente.
Elementos de uma Malha de Controle

TEORIA DE CONTROLE
Exemplo: Controle de Posição. Objetivo manter a “bolinha” em 40 cm. O controle atua em um ventilador.
Elementos de uma Malha de Controle

TEORIA DE CONTROLE
Conceito de Retroação
“Trata-se de um sistema que mantém uma relação entre a grandeza sinal de saída e um valor de referência. A grandeza variável controlada é medida e é comparada com um valor de referência (set-point), a diferença obtida a partir desta comparação é informada ao controle que atua na planta de modo a diminuir ou anular tal desvio.”
Sistemas em Malha Fechada são Sistemas com Retroação
Sistemas em Malha Aberta, o valor do sinal de saída não afeta o controle.
Malha Aberta e Malha Fechada

TEORIA DE CONTROLE
Controle em Malha Aberta (MA)
“Neste sistemas o sinal de saída não é medido, e não afeta a ação de controle. A exatidão do sistema depende de uma calibração. Portanto são usados quando não existe distúrbio atuando.”
CONTROLE PLANTACalibração
Exemplo: Máquina de lavar roupas
Malha Aberta e Malha Fechada

TEORIA DE CONTROLE
Controle em Malha Fechada (MF)
“Neste sistemas o sinal de retroação da variável controlada é comparado com o set-point. A diferença obtida desta comparação (o erro) é utilizada como parâmetro de entrada do controle, que então atua na planta com o objetivo de diminuir o próprio erro.”
+- CONTROLE PLANTA
SENSOR
XYC
R
E
Malha Aberta e Malha Fechada

TEORIA DE CONTROLE
Controle MF
“Este tipo de controle torna o sistema insensível as perturbações externas. A partir da medição da variável controlada e da comparação do seu valor com o set-pointatua para garantir a estabilidade. Contudo esta estabilidade nem sempre é fácil de se garantir, e para isto torna-se necessário sintonizar o controle de tal modo que atue o suficiente para corrigir os erros, nem mais nem menos.”
Exemplo: A maioria dos sistemas industriais atua em controle MF (controle de pressão, de nível, de vazão, de separação de peças, etc)
Malha Aberta e Malha Fechada

TEORIA DE CONTROLE
-OGATA, K. Engenharia de Controle Moderno.3a Edição. Editora LTC. Rio de Janeiro. 1998.
-SILVEIRA, P. R., SANTOS, W. E. Automação e Controle Discreto.7a Edição. Editora Érica. São Paulo. 1998.
Referências

TEORIA DE CONTROLE
Introdução
“Um Sistema é uma combinação de componentes que atuam em conjunto para atingir um objetivo.”
“O Modelo Matemático consiste em um conjunto de equações que representam com certa precisão a dinâmica do sistema.”
“O Modelo deve ser adequado para resolver um problema específico.”
“Um Modelo Matemático deve aliar simplicidade e precisão.”
Modelagem Matemática

TEORIA DE CONTROLE
Introdução
“O Modelo simplificado ignora alguma propriedades físicas. Para que os resultados matemáticos sejam semelhantes aos práticos o efeito destas propriedades para o sistema é pequeno.”
“A equivalência linear para os sistemas não-lineares, visando facilitar a análise matemática do sistema, faz com que o modelo seja validado apenas para determinadas faixas de operação, por exemplo válido para baixas freqüências ou para baixas velocidades (muitas relações físicas são não-lineares).”
Modelagem Matemática

TEORIA DE CONTROLE
Introdução
“O Modelo simplificado ignora alguma propriedades físicas. Para que os resultados matemáticos sejam semelhantes aos práticos o efeito destas propriedades para o sistema é pequeno.”
“A equivalência linear para os sistemas não-lineares, visando facilitar a análise matemática do sistema, faz com que o modelo seja validado apenas para determinadas faixas de operação, por exemplo válido para baixas freqüências ou para baixas velocidades (muitas relações físicas são não-lineares).”
Modelagem Matemática

TEORIA DE CONTROLE
Teoria de Controle Moderna
“A abordagem é centrada no domínio do tempo. Aplicável em sistemas com múltiplas entradas e múltiplas saídas, lineares ou não-lineares, variantes ou invariantes no tempo.”
Teoria de Controle Convencional
“A abordagem é no domínio da freqüência. Aplicável em sistemas com uma entrada e uma saída, lineares e invariantesno tempo.”
Modelagem por Espaço de Estados
Teoria de Controle Moderna
Modelagem Matemática

TEORIA DE CONTROLE
Modelagem por Espaço de Estados
Conceitos
Estado, Variáveis de Estado, Vetor de Estado,
Espaço de Estado, Equações no Espaço de Estados.
a) Estado
“É o menor conjunto de valores das variáveis ditas variáveis de estado. O conhecimento deste valores para t>to e t=to determina o comportamento do sistema em qualquer instante nesta faixa de tempo.”
Modelagem Matemática

TEORIA DE CONTROLE
b) Variáveis de Estado
“Conjunto de valores que determina o estado do sistema. Pode ser um conjunto de variáveis x1, x2, x3 e xn. Édesejável que sejam variáveis mensuráveis e observáveis.”
c) Vetor de Estado
“Vetor que determina o estado x(t) do sistema para qualquer instante de tempo t=to e t>to.”
d) Espaço de Estados e Equações de Espaço de Estados
“Envolve 3 tipos de variáveis na modelagem: variáveis de entrada, variáveis de saída e variáveis de estado.”
Modelagem Matemática

TEORIA DE CONTROLE
“A representação de um sistema em espaço de estados não é única, exceto que o número de variáveis de estado é o mesmo para qualquer representação.”
Exemplo
Suponha:
-sinais de entrada: u1(t), u2(t), ..., ur(t)
-sinais de saída: y1(t), y2(t), ..., ym(t)
-variáveis de estado: x1(t), x2(t), ..., xn(t)
Modelagem Matemática

TEORIA DE CONTROLE
O sistema pode ser descrito como: x1(t) = f1(x1, x2, ..., xn; u1, u2, ..., ur; t)
x2(t) = f2(x1, x2, ..., xn; u1, u2, ..., ur; t)
xn(t) = fn(x1, x2, ..., xn; u1, u2, ..., ur; t)
Os valores dos sinais de saída: y1(t) = g1(x1, x2, ..., xn; u1, u2, ..., ur; t)
y2(t) = g2(x1, x2, ..., xn; u1, u2, ..., ur; t)
ym(t) = gm(x1, x2, ..., xn; u1, u2, ..., ur; t)
Modelagem Matemática

TEORIA DE CONTROLE
Então:
Modelagem Matemática

TEORIA DE CONTROLE
As equações: x(t) = f(x, u, t) Equação de Estado
y(t) = g(x, u, t) Equação de Saída
Linearizando as equações: x(t)= A(t).x(t) + B(t).u(t)
y(t)= C(t).x(t) + D(t).u(t)
Onde: - A é a matriz de estado - B é a matriz de entrada - C é a matriz de saída - D é a matriz de transmissão
Modelagem Matemática

TEORIA DE CONTROLE
Representação em Diagrama em Blocos
y(t)
D(t)
B(t) d(t)
A(t)
C(t)x(t) x(t)u(t)
Se as funções vetoriais f e g não envolvem tempo t o sistema é dito invariante no tempo e então:
x(t)= A.x(t) + B.u(t) y(t) = C.x(t) + D.u(t)
Modelagem Matemática

TEORIA DE CONTROLE
Exemplo de Modelamento de Sistema
Sistema do “Carrinho” - Força X Velocidade
Modelagem Matemática

TEORIA DE CONTROLE Modelagem Matemática

TEORIA DE CONTROLE
Equação de Saída
Modelagem Matemática

TEORIA DE CONTROLE
Diagrama em Blocos do Sistema
d(t)v(t)=y(t)F(t)=u(t) v(t)1
m
b m
Modelagem Matemática

TEORIA DE CONTROLE
Exemplo de Modelamento de Sistema
Sistema do Motor – Tensão x Velocidade
Modelagem Matemática

TEORIA DE CONTROLE Modelagem Matemática

TEORIA DE CONTROLE
Desenvolvendo as Equações
Modelagem Matemática

TEORIA DE CONTROLE
Deste Modo:
Modelagem Matemática

TEORIA DE CONTROLE
Comparando com as Equações
Modelagem Matemática

TEORIA DE CONTROLE
Diagrama em Blocos do Sistema
y(t)=w(t)d(t) 1 0x(t) x(t)u(t)=V(t)
-b K J J
-K -R L L
0
1 L
Modelagem Matemática

TEORIA DE CONTROLE
-OGATA, K. Engenharia de Controle Moderno.3a Edição. Editora LTC. Rio de Janeiro. 1998.
- SITE http://www.engin.umich.edu/group/ctm/examples/examples.html. Acesso em: 02/03/2007.
Referências

TEORIA DE CONTROLE
Transformada de Laplace
“Resolução de equações diferenciais de uma maneira mais vantajosa.”
“Converte-se funções temporais como seno, cosseno, etc em funções algébricas de uma variável complexa S. Operações como integração e diferenciação também pode ser resolvidas de forma algébrica no domínio S.”
“Auxilia na análise dos sistemas de controle, permitindo o estudo do comportamento dos sistemas sem a necessidade de resolver as equações diferenciais.”
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
Transformada de Laplace
“A Transformada de Laplace possui um conjunto de propriedades para a resolução de sinais originalmente no tempo. Por exemplo a convolução de 2 sinais no tempo é a multiplicação deste sinais na Transformada de Laplace.”
x(t) y(t)= x(t)*h(t)h(t)
X(S) Y(S)= X(S).H(S)H(S)
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
Plano S e variável S
“A análise da Transformada de Laplace é feita no domínio da freqüência complexa S.”
“A representação da freqüência complexa é dada em um plano S.”“Por meio do Plano S pode-se analisar um sistema em relação à causalidade, estabilidade e resposta em freqüência.”“Estas características são influenciadas pela localização dos pólos (xxxx) e zeros (o) no Plano S.”
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
Plano S
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
Definição da Transformada de Laplace
Transformada Direta
Transformada Inversa
Propriedade
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
Transformada de Laplace Unilateral
“Existem muitas aplicações da TL nas quais é razoável pensar que os sinais envolvidos sejam causais, ou seja, zero para t<0.”
Transformada Direta Transformada Inversa
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
Sinais Típicos de Sistemas de Controle
“Existem sinais típicos que são utilizados no estudo do controle. São importantes para controle porque modelam muitos sinais físicos que ocorrem na natureza.”
a) Função Impulso (Função Delta de Dirac)
“Quando o sistema é submetido a ações
do tipo surto.”
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
b) Função Degrau
“Quando o sistema ésubmetido a mudanças
abruptas do sinal de entrada. Mudança de set-point.”
“Trata-se de um sinal simples de ser aplicado, pode ser visto como um sinal DC sendo aplicado a um circuito após o fechamento de uma chave em t=0.”
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
c) Função Rampa
“Quando o sistema ésubmetido a uma excitação resultante de uma função que varia gradualmente no tempo.”
“A função rampa é o resultado da integral do sinal da função degrau no tempo.”
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
“Sistema que tem como sinal de entrada o deslocamento angular de um eixo com rotação constante. Presumindo que o sistema teve um ponto de partida onde o eixo iniciou a rotação partindo da velocidade 0 (zero) para a velocidade final (wf) de forma instantânea em t0 (tempo inicial).”
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
d) Sinal Senoidal
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
e) Sinal Exponencial
Exponencial Decrescente b < 0
Exponencial Crescente b > 0
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
f) Sinal Senoidal Amortecido
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
- HAYKIN, S., VAN VEEN, B. Sinais e Sistemas. Editora Bookman. Porto Alegre. 2001
- OGATA, K. Engenharia de Controle Moderno.3a Edição. Editora LTC. Rio de Janeiro. 1998.
Referências

TEORIA DE CONTROLE
Algumas Propriedades da Transformada de Laplace
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
Pares da Transformada de Laplace
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
Transformada Inversa de Laplace
“Trata-se de um cálculo que pode ser complexo. Deste modo utiliza-se o Método das Frações Parciais.”
Transformada de Laplace e Plano S

TEORIA DE CONTROLE
Função de Transferência (FT) “Modela o sistema caracterizando uma relação
entrada/saída dos seus componentes.”“Requisito para utilizar FT: sistema linear e
invariante no tempo e descrito por equações diferenciais.”
H(S)X(S) Y(S)
H(S)=Y(S)X(S)
Y(S) – Função Resposta. Transformada de Laplace do sinal de saída do sistemaX(S) –Função Excitação. Transformada de Laplace do sinal de entrada do sistemaH(S) –Função de Transferência.
Transf. de Laplace e Função de Transferência

TEORIA DE CONTROLE
Função de Transferência “Representa a dinâmica dos sistemas através de
equações algébricas em S.”
“Onde n é a ordem do sistema.”
Propriedades da FT “Modelo matemático. Expressa operacionalmente a
equação diferencial que relaciona entrada e saída.”“É uma propriedade intrínseca do sistema. Independe
da natureza do sinal de entrada (Função Excitação).”
Transf. de Laplace e Função de Transferência

TEORIA DE CONTROLE
Propriedades da FT
“As FT´s de sistemas fisicamente diferentes podem ser idênticas. Não fornece informação quanto a estrutura do sistema.”
“Se a FT de um sistema for conhecida, esta pode ser estudada para diferentes tipos de sinal de entrada.”
“Se a FT for desconhecida pode ser obtida a partir de sinais de entrada conhecidos.”
“Descreve as características físicas do sistema de forma relativamente precisa.”
Transf. de Laplace e Função de Transferência

TEORIA DE CONTROLE
Modelagem por meio da FT
Sistema do “Carrinho” -
Força X Velocidade
Modelos Matemáticos de Sistemas Físicos (Conversão)

TEORIA DE CONTROLE
Modelagem por meio da FT Sistema do Motor – Tensão x Velocidade
Modelos Matemáticos de Sistemas Físicos (Conversão)

TEORIA DE CONTROLE
Modelagem por meio da FT Sistema Elétrico – Circuito RLC
Modelos Matemáticos de Sistemas Físicos (Conversão)

TEORIA DE CONTROLE
Modelagem por meio da FT Sistema de Fluído – Planta de Nível
Modelos Matemáticos de Sistemas Físicos (Conversão)

TEORIA DE CONTROLE
Considerando: Q – valor da vazão quando sistema estável qi - pequeno desvio de vazão na entrada qo- pequeno desvio de vazão na saída N – valor do nível quando sistema estável n – pequeno desvio de nível
E ainda: R e C
Modelos Matemáticos de Sistemas Físicos (Conversão)

TEORIA DE CONTROLE
Outras considerações: “O sistema é linear se o fluxo for laminar (no de
Reynolds < 2000). Mesmo sendo turbulento (no de Reynolds > 3000) pode ser linearizado se as variações de qo, qi e n forem muito pequenas.”
“Considerando o sistema linear a equação diferencial para o sistema pode ser obtida como: vazão de entrada menos a vazão de saída em pequeno intervalo de tempo é a quantidade armazenada.”
Modelos Matemáticos de Sistemas Físicos (Conversão)

TEORIA DE CONTROLE
Então para se obter a FT da planta:
Modelos Matemáticos de Sistemas Físicos (Conversão)

TEORIA DE CONTROLE
Y(S)
+-Controle (Kp)Proporcional
R
RCS + 1
Ganho da Bóia
R(S)
X(S) E(S) Qi(S)
Modelos Matemáticos de Sistemas Físicos (Conversão)

TEORIA DE CONTROLE
Y(S)+- 2
1
S + 2
2
R(S)
X(S) E(S) C(S)
Exemplo: Para o sistema da figura abaixo obtenha aresposta y(t)(equação e esboço gráfico) devido a ocorrência de: a) um surto na entrada b)uma mudança abrupta de set-point (calcular o erro quando o sistema está estável) c)um rampeamento de set-point.
Modelos Matemáticos de Sistemas Físicos (Conversão)

TEORIA DE CONTROLE
-HAYKIN, S., VAN VEEN, B. Sinais e Sistemas. Editora Bookman. Porto Alegre. 2001
- SITE http://www.engin.umich.edu/group/ctm/examples/examples.html. Acesso em: 01/03/2007.
-OGATA, K. Engenharia de Controle Moderno.3a Edição. Editora LTC. Rio de Janeiro. 1998.
Referências

TEORIA DE CONTROLE
Diagrama em Blocos
“Utilizado para mostrar as funções desempenhadas por cada componente do sistema.”
“Setas indicam o fluxo dos sinais dentro do sistema. Propriedade unilateral.”
“Cada Bloco Funcional (Bloco) representa a operação matemática que ocorre no sinal de entrada para produzir o sinal de saída.”
“Permite analisar a contribuição de cada bloco individualmente, ou permite analisar o sistema como um todo por meio da obtenção do diagrama global do sistema.”
Álgebra de Blocos -Diagrama em Blocos

TEORIA DE CONTROLE
Diagrama em Blocos para Malha Aberta (MA)
Y(S)G1(s)
X(S) X1(S) X2(S)
G2(s) G3(s)
Álgebra de Blocos -Diagrama em Blocos

TEORIA DE CONTROLE
Diagrama em Blocos para Malha Fechada (MF)Y(S)
+-R(S)
X(S) E(S)G(S)
H(S)
“H(S) converte o sinal de saída para a mesma grandeza física do sinal de entrada.”
Álgebra de Blocos -Diagrama em Blocos

TEORIA DE CONTROLE
Efeito do Distúrbio em um Diagrama em Blocos para MA
Y(S)G1(s)
X(S) X1(S) X2(S)
G2(s) G3(s) + +
D(S)
Álgebra de Blocos -Diagrama em Blocos

TEORIA DE CONTROLE
Efeito do Distúrbio em um Diagrama em Blocos para MF
Y(S)
H(S)
+-R(S)
X(S) E(S)G(S) + +
D(S)
Álgebra de Blocos -Diagrama em Blocos

TEORIA DE CONTROLE
Regras para a Álgebra de Blocos
Álgebra de Blocos -Diagrama em Blocos

TEORIA DE CONTROLE
Regras para a Álgebra de Blocos
Álgebra de Blocos -Diagrama em Blocos

TEORIA DE CONTROLE
Múltiplas Entradas
- considera apenas uma entrada ativa por vez (as outras são iguais a zero) - encontra o valor de saída para cada entrada -soma todas as saídas parciais
Álgebra de Blocos -Diagrama em Blocos

TEORIA DE CONTROLE
Múltiplas Entradas – Múltiplas Saídas
Y1 e Y2 são distintas não podem ser somadas
Álgebra de Blocos -Diagrama em Blocos

TEORIA DE CONTROLE
-DISTEFANO, J. J., STUBBERUD, A. R., WILLIAMS, I. J. Sistemas de Retroação e Controle. Editora McGraw-Hill. São Paulo. 1972.
-OGATA, K. Engenharia de Controle Moderno.3a Edição. Editora LTC. Rio de Janeiro. 1998.
Referências

TEORIA DE CONTROLE
Introdução
“Na prática os sinais de entrada em geral não são conhecidos. Mesmo assim os sistemas são testados com sinais conhecidos a priori.”
“Com o uso destes sinais típicos tanto a análise matemática quanto a análise experimental podem ser feitas mais facilmente.”
Resposta ao Degrau: sistemas que sofrem transições bruscas Resposta ao Impulso: sofrem ações tipo surtoReposta a Rampa: sofrem ações com variação gradual
Análise da Resposta Temporal

TEORIA DE CONTROLE
Introdução
“Resposta temporal de um sistema consiste de duas partes: parte transitória e parte estacionária.”
Parte Transitória:ocorre desde um estado inicial até um estado final. Parte Estacionária:ocorre quando o sistema tende ao infinito.
“A análise da resposta temporal considera tanto a parte transitória (tempo de subida, tempo de acomodação, sobressinal), quanto a parte estacionária (erro em regime permanente).
Análise da Resposta Temporal

TEORIA DE CONTROLE
Estabilidade “Da observação da resposta temporal pode-se
definir um sistema quanto a sua situação de estabilidade (para sistemas lineares e invariantes no tempo).”
Sistema Estável:a saída do sistema retorna ao estado de equilíbrio mesmo após o sistema ser submetido a uma condição inicial. Sistema Criticamente Estável:apresenta oscilações que se conservam indefinidamente. Sistema Instável:a saída diverge após o sistema ser submetido a uma nova condição (na prática ocorre saturação da saída).
Análise da Resposta Temporal

TEORIA DE CONTROLE
Sistemas de 1ª Ordem
Y(S)+- 1
1
T.S
1
R(S)
X(S) E(S) C(S)
1
T.S + 1
Y(S)X(S)
Aplicando a Álgebra de Blocos para encontrar a FT global
Análise da Resposta Temporal

TEORIA DE CONTROLE
Resposta ao Degrau1
T.S + 1
Y(S)X(S)
T- constante de tempo. y(T) = 63% Quando t=2.T, 3.T e 4.T a saída é
respectivamente 86.5%, 95% e 98,2%. Quando t> 4.T, erro<2%. Regime
Estacionário.
Análise da Resposta Temporal

TEORIA DE CONTROLE
Resposta ao Impulso1
T.S + 1
Y(S)X(S)
X(S)=1
Análise da Resposta Temporal

TEORIA DE CONTROLE
Resposta a Rampa1
T.S + 1
Y(S)X(S)
X(S)=1/S2
Análise da Resposta Temporal

TEORIA DE CONTROLE
Sistemas de 2ª Ordem
Y(S)+- 1
wn2
S.(S+2.ζ.wn)
1
R(S)
X(S) E(S) C(S)
wn2
S2 + 2.ζ.wn.S + wn2
Y(S)X(S)
Aplicando a Álgebra de Blocos para encontrar a FT global
Análise da Resposta Temporal

TEORIA DE CONTROLE
Sistemas de 2ª Ordem
wn2
S2 + 2.ζ.wn.S + wn2
Y(S)X(S)
“Pólos reais ou complexos.”“wn é a frequência natural não amortecida.”“ ζ é o coeficiente de amortecimento.”
Sistema subamortecido: 0 < ζ < 1
Sistema criticamente amortecido: ζ = 1
Sistema superamortecido: ζ > 1
Análise da Resposta Temporal

TEORIA DE CONTROLE
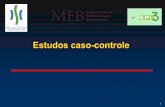
Sistemas de 2ª Ordem wn=1 e ζ variável
Análise da Resposta Temporal

TEORIA DE CONTROLE
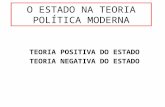
Sistemas de 2ª Ordem ζ = 0,5 e wn variável
Análise da Resposta Temporal

TEORIA DE CONTROLE
-OGATA, K. Engenharia de Controle Moderno.3a Edição. Editora LTC. Rio de Janeiro. 1998.
Referências

TEORIA DE CONTROLE
Introdução “A característica da resposta transitória de um sistema
está relacionada a localização dos pólos em MF.”“Quando tal sistema está sujeito a ação de um ganho
variável a localização dos pólos em MF depender do valor deste ganho.”
“É importante saber como os pólos em MF se movem no plano S quando o ganho é variado.”
“A ferramenta para esta tarefa é o método do lugar das raízes. É uma ferramenta gráfica que torna possível prever a localização dos pólos em MF devido à variação do ganho e a localização de pólos e zeros em MA.”
Lugar das Raízes

TEORIA DE CONTROLE
Construção do Lugar das Raízes (resumo das regras)
-localize os pólos e zeros em MA no plano S; -os pontos onde o ganho K=0 são os pólos, portanto cada lugar das raízes do sistema se origina num pólo e termina em um zero; -se o número de pólos em MA excede o número de zeros supõe que os zeros restantes estão no infinito; -lugar das raízes no eixo real: se o número de raízes (pólos ou zeros) a direita do ponto de teste for ímpar, o ponto em questão é ponto de lugar das raízes;
Lugar das Raízes

TEORIA DE CONTROLE
Construção do Lugar das Raízes (resumo das regras)
-no eixo real, se o lugar das raízes ocorre entre 2 pólos existe um ponto de separação; -no eixo real, se o lugar das raízes ocorre entre 2 zeros um existe um ponto de chegada; -no eixo real, se o lugar das raízes ocorre entre 1 pólo e um 1 zero o ponto pode ser de chegada ou de separação;
Lugar das Raízes

TEORIA DE CONTROLE
Exemplo de Lugar das Raízes
Lugar das Raízes

TEORIA DE CONTROLE
Pólos em MF
Lugar das Raízes

TEORIA DE CONTROLE
Projetos de Sistemas d Controle “Para o projeto de um sistema de controle algumas
especificações de desempenho são desejadas, especificações que se relacionam com exatidão, estabilidade relativa e velocidade de resposta.”
“Visando atender estas especificações surge a compensação, que diz respeito a modificações na dinâmica do sistema.”
“A primeira opção para ajustar um sistema de controle é a alteração do ganho, contudo somente isto pode ser insuficiente, e neste caso surge a necessidade de re-projetar o sistema alterando a sua estrutura (compensação).”
Lugar das Raízes

TEORIA DE CONTROLE
Projetos de Sistemas d Controle “A questão primordial é escolher pólos e zeros para o
compensador de modo que altere o formato do lugar das raízes, e deste modo permita-se que o sistema alcance as especificações de desempenho desejadas.”
“O Lugar das Raízes pode indicar que não se consegue alcançar as especificações desejadas apenas pela alteração do ganho. Ou ainda pode ser que o sistema não seja estável para todos os valores de ganho. Nestes casos a compensação com pólos e zeros torna-se interessante, pois permite alterar a forma do lugar das raízes e com isso chegar também a valores de ganho que faça o sistema atender as especificações.”
Lugar das Raízes

TEORIA DE CONTROLE
Inserção de Pólos e Zeros
-adição de pólo:tende a puxar o lugar das raízes para a direita diminuindo a estabilidade.
Lugar das Raízes

TEORIA DE CONTROLE
Inserção de Pólos e Zeros
-adição de zero:tende a puxar o lugar das raízes para a esquerda tornando o sistema mais estável.
Lugar das Raízes

TEORIA DE CONTROLE
-OGATA, K. Engenharia de Controle Moderno.3a Edição. Editora LTC. Rio de Janeiro. 1998.
Referências

TEORIA DE CONTROLE
Introdução “A resposta em freqüência em regime estacionário é
obtida a partir da excitação do sistema por meio de uma entrada senoidal.”
“Aplica-se uma variação da freqüência do sinal de entrada e observa-se o comportamento da resposta do sistema. Na prática pode-se colocar um gerador de funções na entrada do sistema, e variar a freqüência do sinal.”
“Um sistema linear a invariante no tempo quando submetido a uma excitação senoidal em determinada freqüência terá na saída um sinal também senoidal na mesma freqüência, mas em geral, com fase e amplitudes diferentes.”
Domínio da Freqüência

TEORIA DE CONTROLE Domínio da Freqüência

TEORIA DE CONTROLE
Cálculos de Amplitude e Fase
“A FT senoidal é uma grandeza complexa e pode ser representada por magnitude e por fase.”
“Ângulo negativo – atraso de fase.”“Ângulo positivo – avanço de fase.”
Domínio da Freqüência

TEORIA DE CONTROLE
“A FT senoidal pode ser representada de forma gráfica por Diagrama de Bode (ou diagrama de Nyquist).”
“Os Diagramas de Bode são gráficos logarítmicos (diagramas de Nyquist – gráficos polares).”
Diagramas de Bode“Neste diagrama a FT senoidal pode ser representada
por meio de 2 gráficos: gráfico do módulo e gráfico de fase.”“Ambos os gráficos são constituídos em função da
freqüência e em uma escala logarítmica.”“A representação do módulo é dada por 20.log/G(jw)/ e
a unidade é o dB(decibel).”“Para a fase a unidade utilizada é graus.”
Diagrama de Bode

TEORIA DE CONTROLE
“A escala logarítmica facilita o desenho da curva de resposta em freqüência.”
Entre os fatores que influenciam a construção do diagrama de Bode estão:
- ganho K - fatores integral e derivativo - fatores de primeira ordem - fatores quadráticos
Diagrama de Bode

TEORIA DE CONTROLE
a) Ganho K“O valor do módulo para um ganho K é 20.logK em dB,
e o ângulo de fase é nulo.”
Diagrama de Bode

TEORIA DE CONTROLE
“Número maior que a unidade, o valor em dB épositivo. Número menor que a unidade, o valor em dB énegativo.”
Diagrama de Bode

TEORIA DE CONTROLE
b) Gráficos de Bode (s+a)
Fazendo s=jw tem-se:
G(jw) = jw + a
Sendo w a freqüência em análise. Para baixas freqüências:
G(jw) ~ a
Então o módulo é:
20log/G(jw)/ = 20log a
Diagrama de Bode

TEORIA DE CONTROLE
Para w >> a
G(jw) = jw ou w 90º
Módulo
20log w
Diagrama de Bode

TEORIA DE CONTROLE
Para o gráfico de fase tem-se:θ = tg-1(w/a)
w << a -> θ = 0o
w = a -> θ = 45º
w >> a -> θ = 90o
Diagrama de Bode

TEORIA DE CONTROLE
c) Gráficos de Bode 1/(s+a)
De modo análogo: G(jw) = 1/(jw + a)
w << a :G(jw) = 1/a = a-1 Módulo:20log(a-1) = -20log /a/
w >> a:G(jw) = 1/jw = jw-1 Módulo: -20log w
Diagrama de Bode

TEORIA DE CONTROLE
Para o gráfico de fase tem-se:
G(jw) = (a-jw)/(a2+w2) então θ = - tg-1 w/a
w<<a-> θ = 0o w=a-> θ = -45º w>>a-> θ = -90o
Diagrama de Bode

TEORIA DE CONTROLE
d) Gráficos de Bode de s
G(s) = s G(jw)=jw Módulo:20log w
θ=tg-1 w/0 = 90o
Diagrama de Bode

TEORIA DE CONTROLE
e) Gráficos de Bode de 1/s
G(s) = 1/s G(jw)=1/jw=jw-1 Módulo: -20log w
θ=-tg-1 w/0 = - 90o
Diagrama de Bode

TEORIA DE CONTROLE
-NISE, N. S. Engenharia de Sistemas de Controle.3a Edição. EditoraLTC. Rio de Janeiro. 2002
-OGATA, K. Engenharia de Controle Moderno.3a Edição. EditoraLTC. Rio de Janeiro. 1998.
Referências

TEORIA DE CONTROLE
f) Gráficos de Bode de (s2+2 ζwnS+wn2)ζ=0,5 wn=2 G(S)= S2+2S+4
Diagrama de Bode

TEORIA DE CONTROLE
f) Gráficos de Bode de (s2+2 ζwnS+wn2)ζ=1 wn=2 G(S)= S2+4S+4
Diagrama de Bode

TEORIA DE CONTROLE
f) Gráficos de Bode de (s2+2 ζwnS+wn2)ζ=1,5 wn=2 G(S)= S2+6S+4
Diagrama de Bode

TEORIA DE CONTROLE
g) Gráficos de Bode de (1/s2+2 ζwnS+wn2)ζ=0,5 wn=4 G(S)= 1/(S2+4S+16)
Diagrama de Bode

TEORIA DE CONTROLE
g) Gráficos de Bode de (1/s2+2 ζwnS+wn2)ζ=1 wn=4 G(S)= S2+8S+16
Diagrama de Bode

TEORIA DE CONTROLE
g) Gráficos de Bode de (1/s2+2 ζwnS+wn2)ζ=2 wn=4 G(S)= S2+16S+16
Diagrama de Bode

TEORIA DE CONTROLE
Estabilidade“Se um sistema tem seus pólos no semi-plano
esquerdo ele é estável para MA.”“Para que seja estável em MF a resposta em
freqüência do sistema deve apresentar uma magnitude menor que a unidade quando a fase é +/-180º.”
Diagrama de Bode

TEORIA DE CONTROLE
Estabilidade Exemplo: G(S) = 1/[(S+2)(S+4)(S+5)]
G dB = -52dBEstabilidade entre-52dB e 0dB para fase em -180º.
Então:Ganho K pode aumentar em até 400. Pois 20logK=52dB
Estabilidade : 0 < K < 400
Diagrama de Bode

TEORIA DE CONTROLE
Estabilidade Exemplo: G(S) = 1/[(S+2)(S+4)(S+5)]
Diagrama de Bode

TEORIA DE CONTROLE
Margem de Ganho e Margem de Fase“A margem de ganho (MG) é obtida a partir da
observação do gráfico de fase, quando a fase é 180º.”“A margem de fase (MF) é obtida a partir da
observação do diagrama de magnitude, quando o ganho é 0 dB.”
Diagrama de Bode

TEORIA DE CONTROLE
Exemplo: G(S) = K/[(S+2)(S+4)(S+5)] com K = 200
Diagrama de Bode

TEORIA DE CONTROLE
Exemplo: G(S) = 1/[(S+2)(S+4)(S+5)] com K = 200
MG = 0dB - 5,5 dB = 5,5dB
MF = -156º - (-180º) = 24º
EXERCÍCIO
G(S) = K/[(S+5)(S+20)(S+50)]
Encontre: a) a faixa de valores de K para a estabilidade a partir do diagrama de Bode. b) margem de ganho, margem de fase, freqüência de 0dB e freqüência de 180o para K=10.000 .
Diagrama de Bode

TEORIA DE CONTROLE
-NISE, N. S. Engenharia de Sistemas de Controle.3a Edição. Editora LTC. Rio de Janeiro. 2002
Referências

TEORIA DE CONTROLE
Resposta Transitória e Resposta de Freqüência em MF
“Para a análise do sistema existe uma relação entre a resposta transitória e a resposta de freqüência em malha fechada (MF).”
“As características extraídas a partir da análise da resposta em freqüência são relacionadas com características temporais como tempo de pico, tempo de acomodação, tempo de subida, entre outros.”
Considere a seguinte Malha de Controle
Diagrama de Bode

TEORIA DE CONTROLE
Para wn=1 e ζ=0.1 Gráfico de Bode em Malha Aberta
Diagrama de Bode

TEORIA DE CONTROLE
Para wn=1 e ζ=0.1 Gráfico de Bode em Malha Fechada
Diagrama de Bode

TEORIA DE CONTROLE
MP(magnitude de pico), wp(freqüência de pico), wBw(banda passante)
Diagrama de Bode

TEORIA DE CONTROLE
MP, wp, wBw Equações
“A magnitude máxima está relacionada ao amortecimento. Portanto, também relacionada ao sobre-sinal da resposta temporal.”“A freqüência de pico não é a freqüência natural. Pode ser consideradas iguais apenas para baixos valores de amortecimento.”“Não ocorre pico de magnitude para valores de ζ > 0,707. ATENÇÃO: este pico se refere ao pico de magnitude do gráfico de Bode, contudo ocorre pico de reposta temporal (sobre-sinal) para 0< ζ<1.
Diagrama de Bode

TEORIA DE CONTROLE
Velocidade de Resposta Temporal e Resposta de Freqüência em MF“Ta e Tp são os tempos da resposta temporal, sendo Tp o tempo de pico e Ta o tempo de acomodação.”
Diagrama de Bode

TEORIA DE CONTROLE
Sobre-sinal da Resposta Temporal e Amortecimento ζ“O valor de pico UP (sobre-sinal) da resposta temporal é influenciado pelo coeficiente de amortecimento ζ. O sobre-sinal UP deixa de ocorrer quando ζ > 1.”
Diagrama de Bode

TEORIA DE CONTROLE
Margem de Fase e Amortecimento ζ“ΦM = 65,52º para ζ=0,707, ou seja, para que a resposta de freqüência em MF não apresente pico de magnitude o valor da ΦM em MA deve ser >= 65,53o.”
Diagrama de Bode

TEORIA DE CONTROLE
Para ζ=0,8 ΦM = 69,9o
Diagrama de Bode

TEORIA DE CONTROLE
-NISE, N. S. Engenharia de Sistemas de Controle.3a Edição. Editora LTC. Rio de Janeiro. 2002
Referências

TEORIA DE CONTROLE
Introdução“Um controle automático é aplicado na MF com o objetivo de
aumentar a eficiência no processo.”“O controle automático compara o valor real da variável
controlada, que é medida, com o valor de set-point. A partir desta comparação obtém um desvio, e a parir deste desvio age por meio da ação de controle com o objetivo de reduzir este desvio.”
Ações de Controle

TEORIA DE CONTROLE
“Ou seja, a maneira pela qual o controlador atua é chamada de ação de controle.”“O sinal de correção é o sinal de saída do controlador, é o resultado da interação da ação de controle com o sinal de erro (desvio).”“Este sinal de correção (c(t)) é o sinal que vai atuar em uma válvula ou em algum motor.”“Sinal de Correção e Variável Manipulada.”“As ações de controle são classificadas da seguinte forma:
ação de controle on-off; ação de controle proporcional; ação de controle integral; ação de controle proporcional-integral; ação de controle proporcional-derivativo; ação de controle proporcional-integral-derivativo.”
Ações de Controle

TEORIA DE CONTROLE
a) Ação de Controle ON-OFF
“Sinal de saída faz que o elemento atuante opere apenas em duas posições: ligado e desligado.”
Ações de Controle

TEORIA DE CONTROLE
“Resposta típica de uma ação de controle ON-OFF. A variável controlada oscila entre um valor máximo e um mínimo.”“O controle com ação ON-OFF trata-se de uma opção barata.”“Caso seja o objetivo diminuir a amplitude de oscilação da variável controlada, pode-se diminuir o diferencial entre SP Max e SP min. Com isso a atuação com controle, que apresenta apenas um valor máximo C1 ou um valor mínimo C2, irá modificar de valor com maior freqüência podendo diminuir a vida útil do atuador.”
Ações de Controle

TEORIA DE CONTROLE
Controle ON-OFF sem histerese
Variável lenta Controle de Temperatura
Ações de Controle

TEORIA DE CONTROLE
Controle ON-OFF com histerese
Variável rápida Controle de Pressão
Ações de Controle

TEORIA DE CONTROLE
b) Ação de Controle Proporcional
“Sinal de saída c(t), em controle contínuo também chamado de sinal de correção, faz que o elemento atuante opere em uma faixa de valores de 0 a 100%. Kp é um amplificador com ganho ajustável. ”
“No controle ON-OFF PV varia em torno do SP. No controle contínuo PV se mantém constante. ”
Ações de Controle

TEORIA DE CONTROLE
Controle Proporcional em MA
“A análise ocorre entre o sinal de erro e(t) e o sinal de correção c(t).”“Po é o valor que c(t) assume quando o erro é nulo, é chamado de polarização inicial do controlador.”“Ação Direta: o valor do erro e(t) é somado à polarização.”“Ação Reversa: o valor do erro e(t) é subtraído da polarização.”
Ações de Controle

TEORIA DE CONTROLE
Banda Proporcional e Ganho Kp
“A Banda Proporcional (BP) é definida com a faixa de erro responsável pela variação de 0 à 100 % da saída do controlador. Existe uma relação entre Banda Proporcional e Kp.”
Ações de Controle

TEORIA DE CONTROLE
c) Ação de Controle Integral
“Sinal de saída c(t) varia com uma taxa proporcional ao sinal de erro atuante.”
“Ki é o ganho integral.”
“Erro nulo, variação de saída nula. Porém o sinal c(t) é constante.”
Ações de Controle

TEORIA DE CONTROLE
d) Ação de Controle Proporcional-Integral
“Ti é chamado tempo de integração, e é ajustável assim como Kp.”“Efeito da ação proporcional: tende a estabilizar o sistema. Efeito da ação integral: elimina o erro em regime permanente. A inserção da ação integral pode tornar o sistema instável para valores grandes de Kp.”
Ações de Controle

TEORIA DE CONTROLE
e) Ação de Controle Proporcional-Derivativo
“Td é chamado constante de tempo derivativo, e é ajustável assim como Kp.”“Efeito da ação derivativa: antecipa a correção da ação proporcional. Também éconhecida como ação antecipatória.”“A ação derivativa é efetiva em períodos transitórios.”
Ações de Controle

TEORIA DE CONTROLE
f) Ação de Controle Proporcional-Integral-Derivativo
“Combina as vantagens das 3 ações de controle individuais.”“Kp, Ti e Td são os parâmetros ajustáveis da ação de controle PID.”
Ações de Controle

TEORIA DE CONTROLE
Características da Ação de Controle PID“Quando a resposta transitória e em regime permanente ésatisfatória sem a necessidade de compensação dinâmica basta a utilização do controle proporcional.”“Para melhorar a resposta em regime permanente utiliza-se a ação PI.”“Para melhorar a resposta transitória do sistema utiliza-se a ação PD.”“A ação de controle PID é utilizada para melhorar a resposta transitória e a resposta em regime permanente, adicionando 2 zeros e 1 pólo ao sistema.”3 aspectos relevantes do controlador PID: “adição de controle P melhora o tempo de subida”“adição de controle D melhora o efeito da sobre-elevação.”“adição de controle I elimina o erro em regime permanente (offset).”
Ações de Controle

TEORIA DE CONTROLE
Equação no tempo do controle PID
Referência
-OGATA, K. Engenharia de Controle Moderno.3a Edição. Editora LTC. Rio de Janeiro. 1998.
Ações de Controle