Eletricidade_Motores
35
DEPARTAMENTO DE ENGENHARIA QUÍMICA DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA MOTORES Alex Fonseca Página 1 17/02/05 Motores 1. Tipos de Motores: 1.1 Introdução: A rotação inerente aos motores elétricos é a base do funcionamento de muitos eletrodomésticos. Por vezes, esse movimento de rotação é óbvio, como nos ventiladores ou batedeiras de bolos, mas freqüentemente permanece um tanto disfarçado, como nos agitadores das máquinas de lavar roupas ou nos 'vidros elétricos' das janelas de certos automóveis. Motores elétricos são encontrados nas mais variadas formas e tamanhos, cada qual apropriado á sua tarefa. Não importa quanto torque ou potência um motor deva desenvolver, com certeza, você encontrará no mercado aquele que lhe é mais satisfatório. Alguns motores operam com corrente contínua (CC / DC) e podem ser alimentados quer por pilhas/baterias quer por fontes de alimentação adequadas, outros requerem corrente alternada (CA / AC) e podem ser alimentados diretamente pela rede elétrica domiciliar. Há até mesmo motores que trabalham, indiferentemente, com esses dois tipos de correntes.
-
Upload
erickthadeu -
Category
Documents
-
view
219 -
download
3
description
motores
Transcript of Eletricidade_Motores

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 1 17/02/05
Motores
1. Tipos de Motores:
1.1 Introdução: A rotação inerente aos motores elétricos é a base do funcionamento de muitos eletrodomésticos. Por vezes, esse movimento de rotação é óbvio, como nos ventiladores ou batedeiras de bolos, mas freqüentemente permanece um tanto disfarçado, como nos agitadores das máquinas de lavar roupas ou nos 'vidros elétricos' das janelas de certos automóveis. Motores elétricos são encontrados nas mais variadas formas e tamanhos, cada qual apropriado á sua tarefa. Não importa quanto torque ou potência um motor deva desenvolver, com certeza, você encontrará no mercado aquele que lhe é mais satisfatório.
Alguns motores operam com corrente contínua (CC / DC) e podem ser alimentados quer por pilhas/baterias quer por fontes de alimentação adequadas, outros requerem corrente alternada (CA / AC) e podem ser alimentados diretamente pela rede elétrica domiciliar. Há até mesmo motores que trabalham, indiferentemente, com esses dois tipos de correntes.

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 2 17/02/05
1.2 Tipos de Motores:
1.3 Princípio de funcionamento: Aqui pretendemos examinar os componentes básicos dos motores elétricos; ver 'o que faz um motor girar' e como os motores diferem um dos outros. Para fazer isso iremos nos aproveitar de conceitos já conhecidos sobre os ímãs, forças magnéticas entre ímãs, ação dos campos magnéticos sobre as correntes etc., e, quando se fizer necessário, revisaremos algumas dessas importantes relações que existem entre eletricidade e magnetismo. Nota: Nessa primeira parte, mais elementar, usaremos apenas o conceito de "repulsão/atração entre pólos magnéticos"; numa segunda parte, mais avançada, usaremos do conceito da "ação dos campos magnéticos sobre as correntes".
Enquanto não avançamos no assunto, vá pensando: Como as forças magnéticas podem fazer algo girar? Se as forças magnéticas são as causas do 'por que o motor gira', por que não podemos fazer um motor construído exclusivamente com ímãs permanentes? O que é que determina 'para que lado' o motor vai girar?

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 3 17/02/05
1.4 O Que Faz Girar um Motor Elétrico? O rotor do motor precisa de um torque para iniciar o seu giro. Este torque (momento) normalmente é produzido por forças magnéticas desenvolvidas entre os pólos magnéticos do rotor e aqueles do estator. Forças de atração ou de repulsão, desenvolvidas entre estator e rotor, 'puxam' ou 'empurram' os pólos móveis do rotor, produzindo torques, que fazem o rotor girar mais e mais rapidamente, até que os atritos ou cargas ligadas ao eixo reduzam o torque resultante ao valor 'zero'. Após esse ponto, o rotor passa a girar com velocidade angular constante. Tanto o rotor como o estator do motor devem ser 'magnéticos', pois são essas forças entre pólos que produzem o torque necessário para fazer o rotor girar. Todavia, mesmo que ímãs permanentes sejam freqüentemente usados, principalmente em pequenos motores, pelo menos alguns dos 'ímãs' de um motor devem ser 'eletroímãs'. Um motor não pode funcionar se for construído exclusivamente com ímãs permanentes! Isso é fácil de perceber pois, não só não haverá o torque inicial para 'disparar' o movimento, se eles já estiverem em suas posições de equilíbrio, como apenas oscilarão, em torno dessa posição, se receberem um 'empurrão' externo inicial.
É condição necessária que algum 'pólo' altere sua polaridade para garantir a rotação do rotor. Vamos entender melhor isso, através da ilustração abaixo.
Um motor simples consiste de uma bobina que gira entre dois ímãs permanentes. (a) Os pólos magnéticos da bobina (representados como ímã) são atraídos pelos pólos opostos dos ímãs fixos. (b) A bobina gira para levar esses pólos magnéticos o mais perto possível um do outro mas, (c) ao chegar nessa posição o sentido da corrente é invertido e (d) agora os pólos que se defrontam se repelem, continuando a impulsionar o rotor.
Acima esquematizamos um motor simples onde o estator é constituído por ímãs permanentes e o rotor é uma bobina de fio de cobre esmaltado por onde circula uma corrente elétrica. Uma vez que as correntes elétricas produzem campo magnéticos essa bobina se comporta como um ímã permanente, com seus pólos N (norte) e S (sul) como mostrados na figura.

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 4 17/02/05
Comecemos a descrição pela situação ilustrada em (a) onde a bobina apresenta-se horizontal. Como os pólos opostos se atraem, a bobina experimenta um torque que age no sentido de girar a bobina 'para a esquerda'. A bobina sofre aceleração angular e continua seu giro para a esquerda, como se ilustra em (b). Esse torque continua até que os pólos da bobina alcance os pólos opostos dos ímãs fixos (estator). Nessa situação (c) -- a bobina girou de 90o -- não há torque algum, uma vez que os braços de alavanca são nulos (a direção das forças passa pelo centro de rotação); o rotor está em equilíbrio estável (força resultante nula e torque resultante nulo). Esse é o instante adequado para inverter o sentido da corrente na bobina. Agora os pólos de mesmo nome estão muito próximos e a força de repulsão é intensa. Como a bobina já apresenta um momento angular 'para a esquerda', ela continua girando 'para a esquerda' (algo como uma 'inércia de rotação') e o novo torque (agora propiciado por forças de repulsão), como em (d), colabora para a manutenção e aceleração do movimento de rotação. Mas, mesmo após a bobina ter sido girada de 180o -- não ilustrada na figura --, o movimento continua, a bobina chega na 'vertical' -- giro de 270o --, o torque novamente se anula, a corrente novamente inverte seu sentido, novo torque e a bobina chega novamente á situação (a) -- giro de 360o --. E o ciclo se repete. Essas atrações e repulsões bem coordenadas é que fazem o rotor girar, embora o modo como tais torques sejam obtidos possam variar entre os vários tipos de motores. A inversão do sentido da corrente, no momento oportuno, é condição indispensável para a manutenção dos torques 'favoráveis', os quais garantem o funcionamento dos motores. É por isso que um motor não pode ser feito exclusivamente com ímãs permanentes!
A seguir, vamos examinar como essa 'condição indispensável para a manutenção dos torques favoráveis' é implementada nos diferentes tipos de motores. Perceba, por exemplo, que nas explicações acima, nada foi dito sobre 'como inverter o sentido da corrente'.
1.5 Motores CC Fazer um motor elétrico que possa ser acionado por pilhas ou baterias não é tão fácil como parece. Não basta apenas colocar ímãs permanentes fixos e uma bobina, pela qual circule corrente elétrica, de modo que possa girar entre os pólos desses ímãs. Uma corrente contínua, como o é a fornecida por pilhas ou baterias, é muito boa para fazer eletroímãs com pólos imutáveis mas, como para o funcionamento do motor é preciso periódicas mudanças de polaridade, algo tem que ser feito para inverter o sentido da corrente nos momentos apropriados.
Na maioria dos motores elétricos CC, o rotor é um 'eletroímã' que gira entre os pólos de ímãs permanentes estacionários. Para tornar esse eletroímã mais eficiente o rotor contém um núcleo de ferro, que torna-se fortemente magnetizado, quando a corrente flui pela bobina. O rotor girará desde que essa corrente inverta seu sentido de percurso cada vez que seus pólos alcançam os pólos opostos do estator. O modo mais comum para produzir essas reversões é usar um comutador.

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 5 17/02/05
A corrente flui ora num sentido ora no outro, no rotor desse motor CC, graças às escovas de metal (esquerda da ilustração). Essas escovas tocam o comutador do rotor de forma que a corrente inverte seu sentido a cada meia volta do rotor.
Em sua forma mais simples, um comutador apresenta duas placas de cobre encurvadas e fixadas (isoladamente) no eixo do rotor; os terminais do enrolamento da bobina são soldados nessas placas. A corrente elétrica 'chega' por uma das escovas (+), 'entra' pela placa do comutador, 'passa' pela bobina do rotor, 'sai' pela outra placa do comutador e 'retorna' á fonte pela outra escova (-). Nessa etapa o rotor realiza sua primeira meia-volta. Eis um visual completo:
Nessa meia-volta, as placas do comutador trocam seus contatos com as escovas e a corrente inverte seu sentido de percurso na bobina do rotor. E o motor CC continua girando, sempre com o mesmo sentido de rotação. Mas, o motor CC acima descrito tem seus problemas. Primeiro não há nada que determine qual será o sentido de sua rotação na partida, tanto poderá iniciar girando para a 'esquerda' como para a 'direita'. Segundo, é que por vezes, as escovas pode iniciar tocando ambas as placas ou eventualmente nenhuma; o motor 'não dá

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 6 17/02/05
partida'! Para que a partida se dê com total confiança e no sentido certo é preciso que as escovas sempre 'enviem' corrente para o rotor e que não ocorra nenhum curto circuito entre as placas devido às escovas.
Na maioria dos motores CC consegue-se tais exigências colocando-se várias bobinas no rotor, cada uma com seu par de placas no comutador. Conforme o rotor gira, as escovas suprem a corrente para as bobinas, uma de cada vez, uma após a outra. A 'largura' das escovas também deve ser bem planejada.
O rotor de um motor CC gira com velocidade angular que é proporcional à tensão aplicada em suas bobinas. Tais bobinas têm pequena resistência elétrica e conseqüentemente seriam percorrida por intensas correntes elétricas se o rotor permanecesse em repouso. Todavia, uma vez em movimento, as alterações do fluxo magnético sobre tais bobinas, geram uma força contra-eletromotriz (f.c.e.m.), extraem energia daquela corrente e baixa as tensões elétricas sobre tais bobinas. O torque resultante se anulará quando essa f.c.e.m. se igualar á tensão elétrica aplicada; a velocidade angular passa a ser constante. Em geral, 'carregando-se' o motor (ligando seu eixo a algo que deve ser movimentado) sua rotação não varia acentuadamente, mas, uma maior potência será solicitada da fonte de alimentação (aumenta a intensidade de corrente de alimentação). Para alterar a velocidade angular devemos alterar a tensão aplicada ao motor. O sentido de rotação do rotor depende das assimetrias do motor e também do sentido da corrente elétrica; invertendo-se o sentido da corrente o motor começará a girar 'para trás'. É assim que fazemos um trenzinho de brinquedo 'andar para trás'; invertemos o sentido da corrente em seu rotor.
1.6 Motores Universais Antes de comentarmos sobre os verdadeiros motores elétricos AC, vejamos um tipo intermediário de motor denominado motor universal. Esse motor pode funcionar tanto com alimentação DC como AC. Um verdadeiro motor elétrico DC não aceita alimentação AC (essa inverte o sentido da corrente a cada meio ciclo e isso apenas causaria trepidações); do mesmo modo, um verdadeiro motor AC (como veremos) não aceita alimentação DC (essa não oferecerá as convenientes alterações do sentido da corrente para o correto funcionamento do motor). Porém, se substituirmos os ímãs permanentes dos estatores dos motores DC por eletroímãs e ligarmos (em série) esses eletroímãs no mesmo circuito do rotor e comutador, teremos um motor universal. Eis a ilustração dessa 'engenhoca':

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 7 17/02/05
Nos motores universais, tanto estator como rotor são eletroímãs com bobinas em série e concordância.
Este motor 'girará' corretamente quer seja alimentado por corrente contínua ou corrente alternada. A diferença notável entre motor universal e motor DC é que se você alimentar o motor universal com fonte DC, ele não inverterá o sentido de rotação se você inverter a polaridade da fonte (como acontece com o motor DC), continuará a girar sempre no mesmo sentido. Se você quiser realmente inverter o sentido de rotação de um motor universal deverá inverter as ligações nos eletroímãs dos estatores para inverter seus pólos.
Motores universais são usados, por exemplo, em batedeiras elétricas, aspiradores de pó etc. Em tais motores, com o tempo de uso, haverá desgastes nas escovas de carvão e deverão ser substituídas. Basta você levar um pedacinho da escova velha até uma loja de ferragens, comprar o par de escovas novas adequadas e repor no motor; uma operação bastante simples.
1.7 Motores AC Síncronos
Alguns motores são projetados para operar exclusivamente com corrente alternada. Um tal motor é esquematizado a seguir:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 8 17/02/05
O motor síncrono AC usa eletroímãs como estatores para fazer
girar o rotor que é um ímã permanente. O rotor gira com fre- qüência igual ou múltipla daquela da AC aplicada.
Este motor é essencialmente idêntico a um gerador elétrico; realmente, geradores e motores têm configuração bastante próximas. Um gerador usa do trabalho mecânico para produzir a energia elétrica enquanto que um motor usa a energia elétrica para produzir trabalho mecânico. O rotor, na ilustração acima, é um ímã permanente que gira entre dois eletroímãs estacionários. Como os eletroímãs são alimentados por corrente alternada, seus pólos invertem suas polaridades conforme o sentido da corrente inverte. O rotor gira enquanto seu pólo norte é 'puxado' primeiramente para o eletroímã esquerdo e 'empurrado' pelo eletroímã direito. Cada vez que o pólo norte do rotor está a ponto de alcançar o pólo sul de um eletroímã estacionário, a corrente inverte e esse pólo sul transforma-se um pólo norte. O rotor gira continuamente, terminando uma volta para cada ciclo da corrente alternada. Como sua rotação é perfeitamente sincronizada com as reversões da C.A, este motor é denominado 'motor elétrico síncrono da C. A.'. O motor da bomba d'água de máquinas de lavar roupa, por exemplo, são desse tipo. Os motores de C.A síncronos são usados somente quando uma velocidade angular constante é essencial para o projeto.
Entretanto, os motores síncronos ilustram um ponto importante sobre motores e geradores: são, essencialmente, os mesmos dispositivos. Se você conectar um motor C.A síncrono à rede elétrica domiciliar e o deixar girar, extrairá energia do circuito elétrico e fornecerá trabalho mecânico. Mas, se você ligar uma lâmpada incandescente no cordão de força que sai desse mesmo motor e girar bem rapidamente seu rotor (com um sistema de rodas acopladas e manivela), gerará 'eletricidade' e a lâmpada acenderá.
1.8 Motores A. C. de Indução Alguns motores de corrente alternada têm rotores que não são quer imãs permanentes quer eletroímãs convencionais. Estes rotores são feitos de metais não-magnéticos, como o alumínio, e não têm nenhuma conexão elétrica. Todavia, o isolamento elétrico deles não os impede de ficarem 'magnetizados' ou 'imantados'. Quando um rotor feito de alumínio é exposto a campos magnéticos alternados, correntes elétricas começam a fluir por ele e estas correntes induzidas tornam o rotor magnético. Esse é um fenômeno básico do eletromagnetismo denominado indução eletromagnética. Tais motores, que usam desse fenômeno para tornarem seus rotores magnetizados, são chamados de 'motores A.C de indução'.
Os motores de indução são provavelmente o tipo o mais comum de motor de C. A., comparecendo em muitos eletrodomésticos (ventiladores, motores de toca-discos etc.) e aplicações industriais. Fornecem bom torque, começam facilmente a girar, e são baratos. Um motor de indução trabalha ' movendo' um campo magnético em torno do rotor --- o denominado 'campo magnético girante'. O estator que cerca o rotor contem um eletroímã sofisticado. O estator não se movimenta, mas sim o campo

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 9 17/02/05
magnético que ele produz! Com um uso inteligente de vários recursos eletromagnéticos (espiras de curto circuito, capacitores etc.), o estator pode criar pólos magnéticos de que se deslocam em um círculo e se movimenta em torno do rotor. Na ilustração abaixo, o pólo norte do estator 'gira' no sentido anti-horário em torno do rotor.
1.9 Motores de Passo
Muitos dispositivos computadorizados (drives, CDRom etc.) usam motores especiais que controlam os ângulos de giro de seus rotores. Em vez de girar continuamente, estes rotores giram em etapas discretas; os motores que fazem isso são denominados 'motores de passo'. O rotor de um motor de passo é simplesmente um ímã permanente que é atraído, seqüencialmente, pelos pólos de diversos eletroímãs estacionários, como se ilustra:
Num motor de passo, o rotor é atraído por um par de pólos do estator e a seguir, por outro. O rotor movimenta-se por etapas discretas, pausando em cada orientação, até que novo coman-
do do computador ative um jogo diferente de eletroímãs.
Estes eletroímãs são ligados/ desligados seguindo impulsos cuidadosamente controlados de modo que os pólos magnéticos do rotor se movam de um eletroímã para outro devidamente habilitado.

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 10 17/02/05
2. Conjugado:
O conjugado (também chamado torque, momento ou binário) é a medida do esforço necessário para girar um eixo. É sabido, pela experiência prática que, para levantar um peso por um processo semelhante ao usado em poços a força F que é preciso aplicar à manivela depende do comprimento l da manivela. Quanto maior for a manivela, menor será a força necessária.
No exemplo acima, o conjugado vale: C = 20 N * 0,10 m = 10 N * 0,20 m = 5 N * 0,40 m = 2,0 N.m
3. Energia e Potência Mecânica: A potência mede a “rapidez” com que a energia é aplicada ou consumida. No exemplo anterior, se o poço tem 24,5 metros de profundidade, a energia gasta ou trabalho realizado para trazer o balde do fundo até a boca do poço é sempre a mesma, valendo 20N * 24,5 m = 490 Nm (nota-se que a unidade de medida de energia mecânica, Nm, é a mesma que usamos para o conjugado – trata-se, no entanto, de grandezas de naturezas diferentes, que não devem ser confundidas)
W = F * d (N.m)
Obs.: 1Nm = 1 J = w . ∆t A potência exprime a rapidez com que esta energoia é aplicada e se calcula dividindo a energia do trabalçho total pelo tempo gasto em realizá-lo. Assim, se usarmos um motor elétrico capaz de erguer o balde em 2, segundos, a potência necessária será: P1 = 490 / 2 = 245 W Se usarmos um motor mais potente, com capacidade de realizar o trabalho em 1,3 segundos, a potência necessária será:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 11 17/02/05
P2 = 490 / 1,3 = 377 W A unidade mais usual para medida de potência mecânica é o cv (cavalo-vapor), equivalente a 736W. Então as potências dos dois motores acima serão:
P1 = 245 / 736 = 1 / 3 cv
P2 = 377 / 739 = 1 / 2 cv
Pmec = F*d (W) t Como 1 cv = 736 W, então:
Pmec = F * d (cv) 736* t Para movimentos circulares:
C = F * d (N.m)
V = π*d*n (m/s) 60
Pmec = F * d (cv) 736 onde: C = Conjugado em Nm F = Força em N L =Braço de alavanca em m R = Raio da polia em m v = Velocidade angular em m/s d = Diâmetro da peça em m n = Velocidade em rpm
4. Rendimento: O motor elétrico absorve energia elétrica da linha e a transforma em energia mecânica disponível no eixo. O rendimento define a eficiência com que é feita esta transformação. Chamado “Potência Útil” Pu, a potência mecânica disponível no eixo e, “Potência Absorvida” Pa, a potência elétrica que o motor retira da rede, o rendimento será a relação entre as duas, ou seja,
η = Pu (W) = 736 * P (cv) = 1000 * P (kW) Pa √3 * U * I * cos ϕ √3 * U * I * cos ϕ ou
η% = 736 * P (cv) * 100 √3 * U * I * cos ϕ Obs.: P(kW) = 0,736 P (cv) ou P (cv) = 1,358 (kW)

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 12 17/02/05
5. Relação Entre o Conjugado e a Potência: Quando a energia mecânica é aplicada sob a forma de movimento rotativo, a potência desenvolvida depende do conjugado C e da velocidade de rotação n. As relações são:
6. Velocidade Síncrona (ns): A velocidade síncrona do motor é definida pela velocidade de rotação do campo girante, a qual depende do número de pólos (2p) do motor e da freqüência f da rede, em hertz. Os enrolamentos podem ser construídos com um ou mais pares de pólos.,que e distribuem alternadamente (um “norte” e um “sul”) ao longo da periferia do núcleo magnético. O campo girante percorre um par de pólos (p) a cada ciclo. Assim, como o enrolamento tem pólos ou pares de pólos, a velocidade do campo será:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 13 17/02/05
7. Escorregamento (s):
Se o motor gira a uma velocidade diferente da velocidade síncrona, ou seja, diferente da velocidade do campo girante, o enrolamento do motor “corta” as linhas de força magnética do campo e, pelas leis do eletromagnetismo, circularão nele correntes induzidas. Quanto maior a carga, maior terá que ser o conjugado necessário para acioná-la. Para obter o conjugado, terá que ser maior a diferença de velocidade para que as correntes induzidas e os campos produzidos sejam maiores. Portanto, à medida que a carga aumenta, cai a rotação do motor. Quando a carga é zero (motor em vazio) o rotor girará praticamente com a rotação síncrona. A diferença entre a velocidade do motor n e a velocidade síncrona ns, chama-se escorregamento s, que pode ser expresso em rpm, como fração da velocidade síncrona, ou como porcentagem desta.
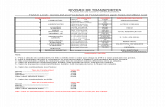
8. Tolerância à Variação de Tensão: Conforme a NBR 7094 (cap. 4, item 4.2.1.4) o motor elétrico de indução deve ser capaz de funcionar de maneira satisfatória quando alimentado com tensões até 10% acima ou abaixo de sua tensão nominal, desde que a freqüência seja a nominal. Se houver, simultaneamente, variação da freqüência, a tolerância de variação da tensão é reduzida de modo que a doma das duas variações (tensão e freqüência) não passe de 10%. O efeito aproximado da variação da tensão sobre as características do motor está mostrado na tabela abaixo.

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 14 17/02/05
9. Tolerância à Variação de Frequência: Conforme a NBR 7094 (cap. 4, item 4.2.1.4) o motor elétrico de indução deve ser capaz de funcionar de maneira satisfatória quando alimentado com frequências até 5% acima ou abaixo de sua frequência nominal. Se houver, ao mesmo tempo variação de tensão, esta deve ser tal que a soma das duas variações (tensão e freqüência) não passe de 10%. O efeito aproximado da variação da frequência sobre as características do motor está mostrado na tabela abaixo:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 15 17/02/05
10. Ligação em Frequências Diferentes:: Motores trifásicos bobinados para 50 Hz poderão ser ligados também em rede de 60 Hz.
a) Ligando o motor de 50 Hz, com a mesma tensão, em 60 Hz: -a potência do motor será a mesma; - a corrente nominal é a mesma; - a corrente de partida diminúi em 17%; - o conjugado de partida diminúi em 17%; - o conjugado máximo diminúi em 17%; - a velocidade nominal aumenta em 20%
NOTA: Deverão ser observados os valores de potência requeridas, para motores que acionam equipamentos que possuem conjugados variáveis com a rotação.
b) Se alterar a tensão em proporção à frequência: -a potência do motor aumenta em 20%; - a corrente nominal é a mesma; - a corrente de partida será aproximadamente a mesma; - o conjugado de partida será aproximadamente o mesmo; - o conjugado máximo será aproximadamente o mesmo; - a rotação nominal aumenta 20%
Quando o motor for ligado em 60Hz com a bobinagem 50 Hz, poderemos aumentar a potência em 15% para II pólos e 20% para. IV, VI e VIII pólos.
11. Limitação de Corrente de Partida em Motores Trifásicos: Sempre que possível, a partida de um motor trifásico de gaiola, deverá ser direta, por meio de contatores. Deve ter-se em conta que para um determinado motor, as curvas de conjugado e corrente são fixas, independente da dificuldade de partida, para uma tensão constante. Nos casos em que a corrente de partida do motor é elevada podem ocorrer as seguintes consequências prejudiciais:
a) Elevada queda de tensão no sistema de alimentação da rede. Em função disto, provoca a interferência em equipamentos instalados no sistema;
b) O sistema de proteção (cabos, contatores) deverá ser superdimensionado, ocasionando um custo elevado; c) A imposição das concessionárias de energia elétrica que limitam a queda de tensão na rede.
Caso a partida direta não seja possível, devido aos problemas citados acima, pode-se usar sistema de partida indireta para reduzir a corrente de partida. Estes sistemas de partida indireta (temsão reduzida) são:
- Chave estrela-triângulo; - Chave compensadora; - Chave série-paralelo; - Resistor primário; - Reator primário; - Partida eletrônica (sof-start)

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 16 17/02/05
11.1 Partida com chave estrela-triângulo (Y - ∆): É fundamental para a partida com chave estrela-triângulo que o motor tenha a possibilidade de ligação em dupla tensão, ou seja, 220 / 380V, em 380/660V ou 440/760V. Os motores deverão ter no mínimo seis bornes de ligação. A partida estrela-triângulo poderá ser usada quando a curva de conjugado do motor é suficientemente elevada para poder garantir a aceleração da máquina com corrente reduzida. Na ligação estrela, o conjugado fica reduzido para 25 a 33% do conjugado de partida da ligação triângulo. Por este motivo, sempre que for necessária uma partida estrela-triângulo, deverá ser utilizado um motor com curva de conjugado elevado. Antes de se decidir por uma partida estrela-triângulo, será necessário verificar se o conjugado de partida será suficiente para operar a máquina. O conjugado resistente da carga não poderá ultrapassar o conjugado de partida do motor, nem a corrente no instante da mudança para triângulo poderá ser de valor inaceitável.
Existem casos onde este sistema de partida não pode ser usado. Na figura abaixo temos um alto conjugado resistente Cr. Se a partida for em estrela, o motor acelera a carga aproximadamente até 85% da rotação nominal. Neste ponto, a chave deverá ser ligada em triângulo. Neste caso, a corrente que era aproximadamente a nominal, ou seja, 100%, salta repentinamente para 320%, o que não é nenhuma vantagem, uma vez que na partida era somente 190%.

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 17 17/02/05
Na figura abaixo, temos o motor com as mesmas características, porém o conjugado resistente Cr é bem menor. Na ligação Y, o motor acelera a carga até 95% da rotação nominal. Quando a chave é ligada em ∆, a corrente, que era de aproximadamente 50% , sobe para 170%, ou seja, praticamente igual a da partida em Y. Neste caso, a ligação estrela-triângulo apresenta vantagem, porque se fosse ligado direto, absorveria da rede 600% da corrente nominal. A chave estrela-triângulo em geral ó pode ser empregada em partidas da máquina em vazio, isto é, sem carga. Somente depois de ter atingido a rotação nominal, a carga poderá ser aplicada. O instante da comutação de estrela para triângulo deve ser cuidadosamente determinado, para que este método de partida possa efetivamente ser vantajoso nos casos em que a partida direta não é possível.
11.2 Partida com chave compensadora (auto-transformador): A chave compensadora pode ser usada para a partida de motores sob carga. Ela reduz a corrente de partida, evitando sobrecarga no circuito, deixando, porém, o motor com um conjugado suficiente para a partida e aceleração. A tensão na chave compensadora é reduzida através de autotransformador que possui taps de 50, 65 e 80% da tensão nominal. Para os motores que partirem com uma tensão menor que a tensão nominal, a corrente e o conjugado de partida devem ser multiplicados pelos fatores K1 (fator de multiplicação da corrente) e fator K2 (fator de multiplicação do conjugado) obtidos no gráfico abaixo.

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 18 17/02/05
11.3 Comparação entre chaves estrela-triângulo e compensadoras “automáticas”: Estrela-triângulo (automática)
Vantagens a) A chave estrela-triângulo é muito utilizada por seu custo reduzido b) Não tem limite quanto ao seu número de manobras c) Os componentes ocupam pouco espaço d) A corrente fica reduzida a aproximadamente 1/3. Desvantagens a) A chave só pode ser aplicada a motores cujos seis bornes ou terminais sejam acessíveis. b) A tensão da rede deve coincidir coma a tensão em triângulo do motor c) Com a corrente de partida reduzida para aproximadamente 1/3 da corrente nominal, reduz-se também o momento de
partida para 1/3 d) Caso o motor não atingir pelo menos 90% de sua velocidade nominal, o pico de corrente na comutação de estrela para
triângulo será quase como de fosse uma partida direta, o que se torna prejudicial aos contatos dos contatores e não traz nenhuma vantagem para a rede elétrica.

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 19 17/02/05
Chave compensadora (automática) Vantagens
a) No tap de 65% a corrente de linha é aproximadamente igual a da chave estrela-triângulo, entretanto, na passagem da tensão reduzida para a tensão da rede, o motor não é desligado e o segundo pico é bem reduzido, visto que o auto-trafo por curto espaço de tempo se torna uma reatância.
b) É possível a variação do tap de 65% para 80% ou até 90% da tensão da rede, a fim de que o motor possa partir satisfatoriamente.
Desvantagens a) A grande desvantagem é a limitação de sua freqüência de manobras. Na chave compensadoaa automática é sempre necessário saber a sua frequência de manobra para determinar o auto-trafo de acordo. c) A chave compensadora é bem mais cara do que a chave estrela-triângulo, devido ao auto-trafo. d) Devido ao tamanho do auto-trafo, a construção se torna mais volumosa, necessitando quadros maiores, o que torna o seu
preço elevado.
11.4 Partida com chave série-paralelo: Para partida em série-paralelo é necessário que o motor seja religável para duas tensões, a menor delas igual a da rede e a outra duas vezes maior. Este tipo de ligação exige nove terminais no motor e a tensão nominal mais comum é 220/440V, ou seja: durante a partida o motor é ligado na configuração série até atingir sua rotação nominal e, então, faz-se a comutação para a configuração paralelo.
11.5 Partida com resistor primário: Neste método de partida são colocados resistores em série com cada uma das fases, provocando uma queda de tensão nos bornes do motor, e conseqüentemente, uma redução na corrente absorvida. Naturalmente, o conjugado de partida também fica reduzido. Quando o motor está próximo de sua velocidade nominal, é ligado diretamente à rede. Este método de partida melhora o fator de potência na partida, mas, possui o inconveniente de produzir maior perda de energia nos próprios resistores. Na prática é um método pouco utilizado.
11.6 Partida com reator primário: Este método de partida é similar ao anterior, sendo inserida uma reatância indutiva nas fases de alimentação. Tem-se com isso, perdas menores, maior fator de potência e torque máximo maior que no caso do resistor primário. Porém, os reatores são mais caros, sendo utilizados, na prática, apenas para partida de motores de grande potência e de média tensão.
11.7 Partida eletrônica (soft start): O avanço da eletrônica permitiu a criação da chave de partida a esta sólido a qual consiste de um conjunto de pares de tiristores (SCR) (ou combinações de tiristores/diodos), um em cada borne de potência do motor. O ângulo de disparo de cada par de tiristores é controlado eletronicamente para aplicar uma tensão variável aos terminais do motor durante a aceleração. Este comportamento é, muitas vezes, chamado de partida suave (soft-start). No final do período de partida, ajustável tipicamente entre 2 e 30 segundos, a tensão atinge seu valor pleno após uma aceleração suave ou uma rampa ascendente, ao invés de ser submetido a incrementos ou “saltos” repentinos, como ocorre com os métodos de partida autotransformador, ligação estrela-triângulo, etc. Com isso, consegue-se manter a corrente de partida (na linha) próxima da nominal e com suave variação, como desejado.Além da vantagem do controle de tensão (corrente) durante a partida, a chave eletrônica apresenta, também, a vantagem de não possuir partes móveis ou que gerem arco, como nas chaves mecânicas. Este é um dos pontos fortes das chaves eletrônicas, pois sua vida útil é mais longa (até centenas de milhões de manobras). É importante lembrar, porém, que uma vida útil tão longa, tem pouco a ver com o motor, o qual pode falhar bem mais cedo por questões que não tem a ver com a partida. não tem nada a ver com o moto

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 20 17/02/05
de indução trifásicos Se o motor gira a uma velocidade diferente da velocidade síncrona, ou seja, diferente da velocidade do campo girante, o enrolamento do motor “corta” as linhas de força magnética do campo e, pelas leis do eletromagnetismo, circularão nele correntes induzidas. Quando a energia mecânica é aplicada sob a forma de movimento rotativo, a potência desenvolvida depende do conjugado C e da velocidade de rotação n. As relações são:
12. Categorias de Conjugado – Valores Mínimos Normalizados:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 21 17/02/05
13. Classes de Isolamento:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 22 17/02/05
14. Regimes de Serviço:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 23 17/02/05

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 24 17/02/05
15. Fator de Serviço (FS): Chama-se fator de serviço (FS) o fator que, aplicado à potência nominal, indica a carga permissível que pode ser aplicada continuamente ao motor, sob condições especificadas. Note que se trata de uma capacidade de sobrecarga contínua, ou seja, uma reserva de potência que dá ao motor uma capacidade de suportar melhor o funcionamento em condições desfavoráveis. O fator de serviço não deve ser confundido com a capacidade de sobrecarga momentânea, durante alguns minutos( este valor de sobrecarga momentânea normalmente é da ordem de 60% da carga nominal durante 15 segundos). O fator de serviço FS – 1,0, significa que o motor não foi projetado para funcionar continuamente acima de sua potência nominal. Isto, entretanto, não muda a sua capacidade para sobrecargas momentâneas.

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 25 17/02/05
16. Velocidade Nominal: É a velocidade (RPM) do motor funcionando à potência nominal, sob tensão e frequência nominais.
A velocidade síncrona ns é função do número de pólos e da freqüência de alimentação:
17. Corrente Nominal:
18. Rendimento:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 26 17/02/05
18.2 Importância do Rendimento:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 27 17/02/05
19. Graus de Proteção (IP):
A norma NBR-6146 define os graus de proteção dos equipamentos elétricos por meio de letras características IP, seguidas por dois algarismos.

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 28 17/02/05

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 29 17/02/05
A letra (W) colocada entre as letras IP e os algarismos indicativos do grau de proteção, indica que o motor é protegido contra intempéries.
20. Características da Proteção de Motores:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 30 17/02/05

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 31 17/02/05
21. Placa de Identificação:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 32 17/02/05
22. Seleção e Aplicação de Motores Elétricos Trifásicos:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 33 17/02/05

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 34 17/02/05
23. Guia de Seleção do Tipo de Motor para Diferentes Aplicações:

DEPARTAMENTO DE ENGENHARIA QUÍMICA
DISCIPLINA:ELETRICIDADE APLICADA PROFESSOR: ALEX FONSECA
MOTORES
Alex Fonseca Página 35 17/02/05
24. Componentes de um Motor Elétrico