algvet
15
~u ~v ~ w ~u + ~v = ~v + ~u, ~u +( ~v + ~ w)=( ~v + ~u)+ ~ w, (α + β ) · ~u = α · ~u + β · ~v, α · (~u + ~v)= α · ~u + α · ~v, α · (β~u)=(αβ ) · ~u ~ 0+ ~v = ~v, 0 · ~v = ~ 0, 1 · ~v = ~v. ~u + ~v + ~ w
-
Upload
rubia-fernandes -
Category
Documents
-
view
20 -
download
6
Transcript of algvet

Capítulo 0
Álgebra vetorial
O objetivo deste capítulo é revisar conceitos básicos do cálculo e da álgebra linear necessáriosao entendimento do cálculo vetorial.
0.1 Vetores e escalares
Na álgebra linear, vetores são de�nidos de forma abstrata como os elementos de um espaçovetorial. Os vetores são, então, os elementos de um conjunto em que estão de�nidas duasoperações: a soma de vetores e o produto de vetores por escalares obedecendo as propriedades(1). Um escalar é um número real ou complexo. Quando o corpo de escalares é o conjuntodos números reais, então dizemos que o espaço vetorial é real. Quando o corpo de escalaresé o conjunto dos números complexos, dizemos que o espaço vetoral é complexo. Usaremosuma seta para indicar vetores, exemplo: ~u, ~v e ~w. Para que um espaço vetorial esteja bemde�nido, as seguinte propriedades devem ser satisfeitas:
~u+ ~v = ~v + ~u, (Comutatividade da soma) (1a)
~u+ (~v + ~w) = (~v + ~u) + ~w, (Associatividade da soma) (1b)
(α + β) · ~u = α · ~u+ β · ~v, (Distributividade da multiplicação sobre a soma) (1c)
α · (~u+ ~v) = α · ~u+ α · ~v, (Distributividade da soma sobre a multiplicação) (1d)
α · (β~u) = (αβ) · ~u (1e)
~0 + ~v = ~v, (Existência de um vetor nulo) (1f)
0 · ~v = ~0, (1g)
1 · ~v = ~v. (Elemento neutro) (1h)
Observamos que a propriedade associativa dada por (1b) permite que se escreve a soma detrês vetores ~u+~v+ ~w sem risco de ambiguidade. A propriedade (1e) é algumas vez chamadade associatividade, no entanto, é cauteloso observar que ela não estabelece a associatividadede uma operação, já que o produto de escalares é uma operação distinta do produto de umescalar por um vetor. A propriedade (1f) garante a existência de um vetor nulo que funcionacom um elemento neutro da soma vetorial.
1

2 CAPÍTULO 0. ÁLGEBRA VETORIAL
Observação 0.1. O vetor nulo ~0 e escalar nulo 0 são entidades matemáticas distintas e nãodevem ser confundidas.
A subtração de dois vetores é de�nida por
~u− ~v = ~u+ (−1) · ~v. (2)
O vetor (−1) · ~v é também denotado por −~v e tem a seguinte propriedade:
~v + (−~v) = ~v + (−1)~v = (1− 1)~v = 0~v = ~0. (3)
A marcação da multiplicação de escalar por um vetor com um pequeno ponto pode seromitida sem risco de ambiguidade, pelo que usaremos α · ~v e α~v de forma indistinta.
Um conjunto de vetores {~v1, ~v2, . . . , ~vn} é dito linearmente dependente (LD), se existemescalares {α1, α2, . . . , αn} com pelo menos um αi 6= 0 tal que
n∑i=1
αi~vi = ~0
Analogamente, um conjunto de vetores {~v1, ~v2, . . . , ~vn} é dito linearmente independente (LI)se a identidade
n∑i=1
αi~vi = ~0
implica necessariamente queα1 = α2 = . . . = αn = 0.
Um conjunto de vetores LI E = {~e1, ~e2, . . . , ~en} é dito uma base para um espaço vetorialV se todo vetor ~v ∈ V pode ser escrito como uma combinação linear dos vetores de B:
~v =n∑i=1
αi~ei.
Um espaço vetorial é dito de dimensão �nita se admite uma base composta por um número�nito de elementos.
Teorema 0.1. Seja V um espaço vetorial e E = {~e1, ~e2, . . . , ~en} e F = {~f1, ~f2, . . . , ~fm} duasbases de V . Então n = m. Em outras palavras, todas as bases de espaço linear de dimensão�nita têm o mesmo número de elementos.
A importância deste teorema reside no fato de permitir a de�nição de dimensão de umespaço vetorial como sendo o número de elementos de uma base. Esta de�nição está bemposta, uma vez que este número independe da escolha de base.
Outro conceito importante em espaços reais de dimensão �nita é o de orientação de umabase. O leitor já deve estar familiarizado com o conceito de orientação dextrogira e levogira(regra da mão direita e esquerda) no espaço tridimensional. No entanto este conceito podeser estendido de forma natural para espaços reais de n-dimensões. Formalmente falando duasbases B1 e B2 têm a mesma orientação se o determinante da transformação linear que ligaB1 a B2 é positivo.
O espaço vetorial real de n dimensões é denotado Rn.
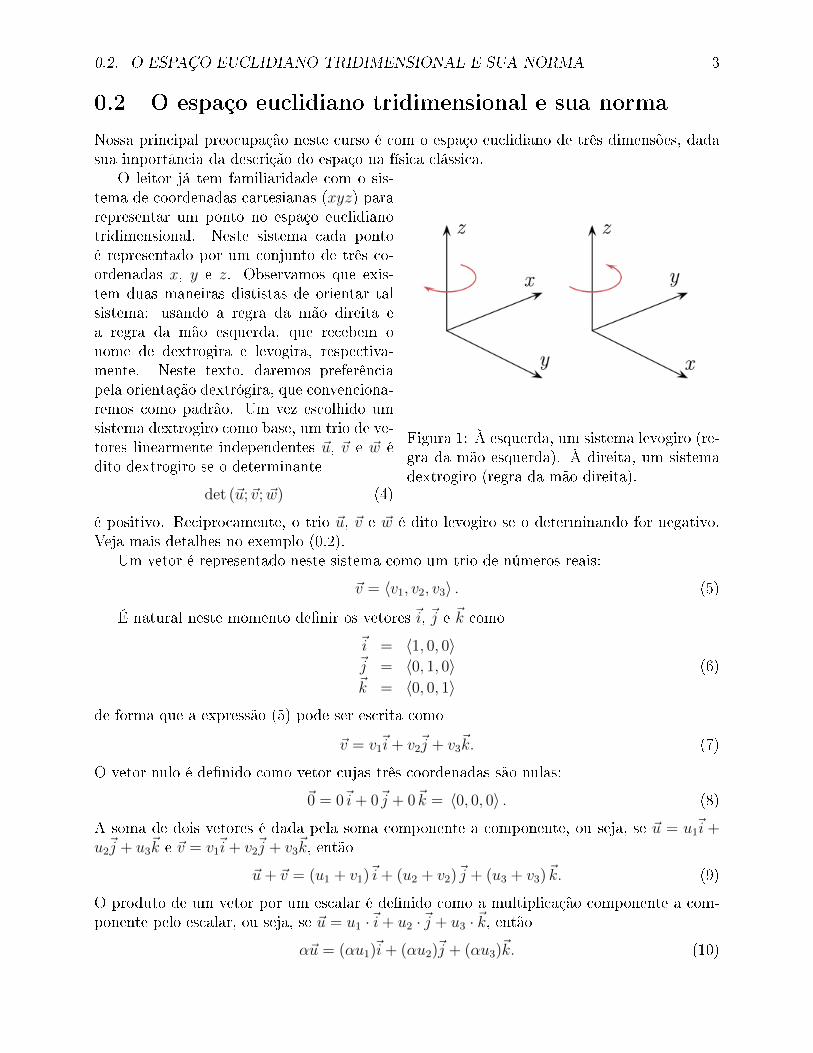
0.2. O ESPAÇO EUCLIDIANO TRIDIMENSIONAL E SUA NORMA 3
0.2 O espaço euclidiano tridimensional e sua norma
Nossa principal preocupação neste curso é com o espaço euclidiano de três dimensões, dadasua importância da descrição do espaço na física clássica.
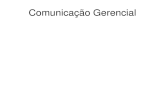
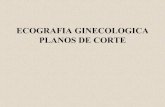
Figura 1: À esquerda, um sistema levogiro (re-gra da mão esquerda). À direita, um sistemadextrogiro (regra da mão direita).
O leitor já tem familiaridade com o sis-tema de coordenadas cartesianas (xyz) pararepresentar um ponto no espaço euclidianotridimensional. Neste sistema cada pontoé representado por um conjunto de três co-ordenadas x, y e z. Observamos que exis-tem duas maneiras dististas de orientar talsistema: usando a regra da mão direita ea regra da mão esquerda, que recebem onome de dextrogira e levogira, respectiva-mente. Neste texto, daremos preferênciapela orientação dextrógira, que convenciona-remos como padrão. Um vez escolhido umsistema dextrogiro como base, um trio de ve-tores linearmente independentes ~u, ~v e ~w édito dextrogiro se o determinante
det (~u;~v; ~w) (4)
é positivo. Reciprocamente, o trio ~u, ~v e ~w é dito levogiro se o determinando for negativo.Veja mais detalhes no exemplo (0.2).
Um vetor é representado neste sistema como um trio de números reais:
~v = 〈v1, v2, v3〉 . (5)
É natural neste momento de�nir os vetores ~i, ~j e ~k como
~i = 〈1, 0, 0〉~j = 〈0, 1, 0〉~k = 〈0, 0, 1〉
(6)
de forma que a expressão (5) pode ser escrita como
~v = v1~i+ v2~j + v3~k. (7)
O vetor nulo é de�nido como vetor cujas três coordenadas são nulas:
~0 = 0~i+ 0~j + 0~k = 〈0, 0, 0〉 . (8)
A soma de dois vetores é dada pela soma componente a componente, ou seja, se ~u = u1~i +u2~j + u3~k e ~v = v1~i+ v2~j + v3~k, então
~u+ ~v = (u1 + v1)~i+ (u2 + v2)~j + (u3 + v3)~k. (9)
O produto de um vetor por um escalar é de�nido como a multiplicação componente a com-ponente pelo escalar, ou seja, se ~u = u1 ·~i+ u2 ·~j + u3 · ~k, então
α~u = (αu1)~i+ (αu2)~j + (αu3)~k. (10)
4 CAPÍTULO 0. ÁLGEBRA VETORIAL
Exercício 0.1. Mostre que o espaço vetorial assim de�nido satisfaz as propriedades (1).
De�nimos também a norma euclidiana de um vetor ~v como a distância da origem atéo ponto que o vetor representa e a denotamos por ‖~v‖. Pelo Teorema de Pitágoras, dageometria euclidiana, temos:
‖~v‖ =√v21 + v22 + v23. (11)
Exercício 0.2. Veri�que que a norma euclidiana satisfaz as seguintes propriedades:
‖α~u‖ = |α| ‖~u‖, (Homogeneidade) (12a)
‖~u+ ~v‖ ≤ ‖~u‖+ ‖~v‖, (Desigualdade triangular) (12b)
‖~u‖ = 0 =⇒ ~u = ~0, (Separação) (12c)
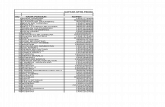
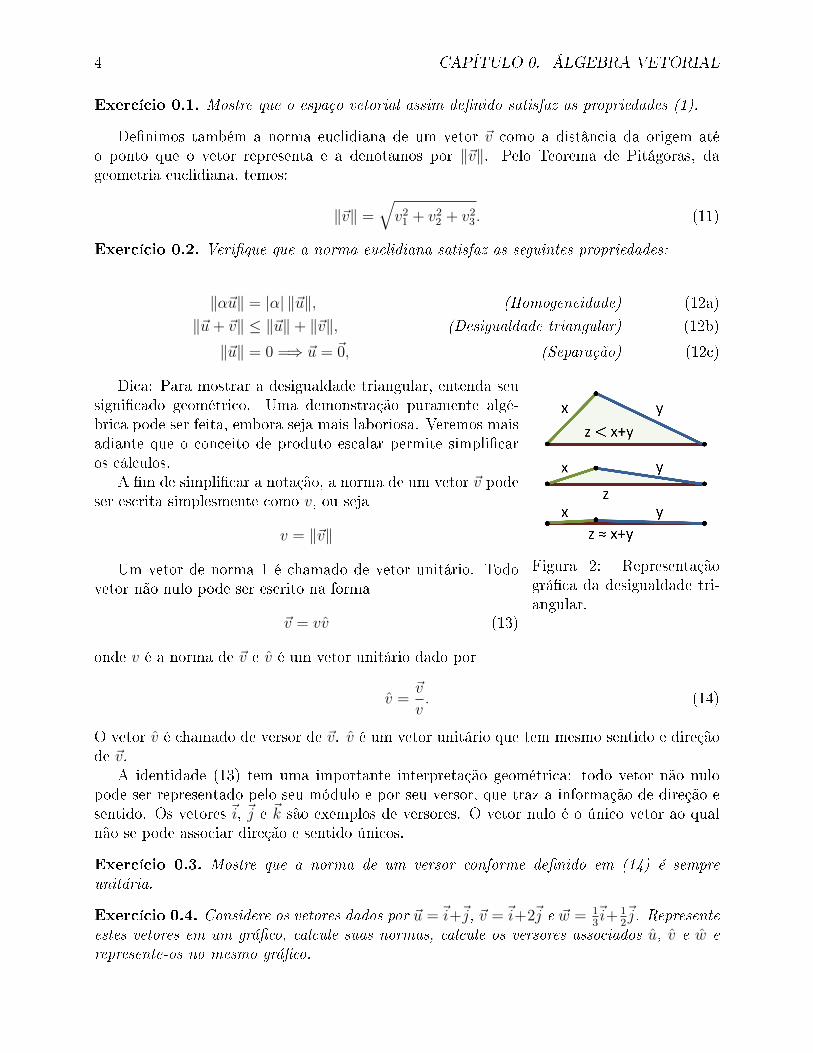
Figura 2: Representaçãográ�ca da desigualdade tri-angular.
Dica: Para mostrar a desigualdade triangular, entenda seusigni�cado geométrico. Uma demonstração puramente algé-brica pode ser feita, embora seja mais laboriosa. Veremos maisadiante que o conceito de produto escalar permite simpli�caros cálculos.
A �m de simpli�car a notação, a norma de um vetor ~v podeser escrita simplesmente como v, ou seja
v = ‖~v‖
Um vetor de norma 1 é chamado de vetor unitário. Todovetor não nulo pode ser escrito na forma
~v = vv (13)
onde v é a norma de ~v e v é um vetor unitário dado por
v =~v
v. (14)
O vetor v é chamado de versor de ~v. v é um vetor unitário que tem mesmo sentido e direçãode ~v.
A identidade (13) tem uma importante interpretação geométrica: todo vetor não nulopode ser representado pelo seu módulo e por seu versor, que traz a informação de direção esentido. Os vetores ~i, ~j e ~k são exemplos de versores. O vetor nulo é o único vetor ao qualnão se pode associar direção e sentido únicos.
Exercício 0.3. Mostre que a norma de um versor conforme de�nido em (14) é sempreunitária.
Exercício 0.4. Considere os vetores dados por ~u =~i+~j, ~v =~i+2~j e ~w = 13~i+ 1
2~j. Represente
estes vetores em um grá�co, calcule suas normas, calcule os versores associados u, v e w erepresente-os no mesmo grá�co.

0.2. O ESPAÇO EUCLIDIANO TRIDIMENSIONAL E SUA NORMA 5
Resp: u =√2, v =
√5 e w =
√136. u =
√22~i+
√22~j, v =
√55~i+ 2
√5
5~j, w = 2
√13
13~i+ 3
√13
13~j
Exercício 0.5. Considere o vetor ~u = cosϕ~i + senϕ~j. Veri�que este vetor é unitário erepresente-o gra�camente quando ϕ = 0, ϕ = π
6, ϕ = π
2e ϕ = π
Exercício 0.6. Considere o vetor ~u = sen θ cosϕ~i+sen θ senϕ~j+cos θ~k. Veri�que este vetoré unitário e represente-o gra�camente quando
a) θ = 0
b) θ = π4e ϕ = π
4
c) θ = π2e ϕ = π
4
d) θ = π
Problema 0.1. Seja ~u = u1~i+u2~j um vetor não nulo �xo no plano xy e ~v = v(cosϕ~i+ senϕ~j
)um vetor de norma �xa no plano xy. Considere a função m(ϕ) = ‖~u+~v‖ e encontre o valormáximo e mínimo de m(ϕ). Interprete o resultado.
Problema 0.2. Conforme observado no texto, um trio de vetores ~u, ~v e ~w é dextrogiro se
det (~u;~v; ~w) =
∣∣∣∣∣∣u1 v1 w1
u2 v2 w2
u3 v3 w3
∣∣∣∣∣∣ > 0.
onde ~u = u1~i+ u2~j + u3~k, ~v = v1~i+ v2~j + v3~k e ~w = w1~i+ w2
~j + w3~k. Faça o que se pede:
a) Veri�que que se ~u, ~v e ~w forma um sistema dextrogiro então ~v, ~u e ~w é levogiro.
b) Veri�que que se ~u, ~v e ~w forma um sistema dextrogiro então ~v, ~w e ~u e ~w, ~u e ~v sãodextrogiros.
c) Veri�que que o trio ~u, ~v e ~w é dextrogiro quando ~u =~i+~j, ~v = −2~i+~j e ~w =~i+~j+~k.
d) Veri�que que o trio ~u, ~v e ~w é dextrogiro quando ~u = ~i + ~j, ~v = −2~i + ~j e ~w = ~i.Interprete gra�camente.
Problema 0.3. Considere um sistema de coordenadas cartesianas dextrogiro construído daseguinte forma:
• O centro da Terra coincide com a origem do sistema.
• O extremo norte da Terra intercepta o eixo z em valores positivos.
• O observatório de Greenwich está sob plano xz com x > 0.
Considere a superfície terrestre com uma esfera de raio R⊕. Denote a longitude por λ e alatitude por φ. Convecione como positivas a longitude leste e a latitude norte. Veja �gura 3.Seja ~r = x~i+y~j+z~k o vetor que representa um ponto sobre a superfície da Terra. Responda:

6 CAPÍTULO 0. ÁLGEBRA VETORIAL
a) Qual a norma do vetor ~r?
b) Qual é o valor de x, y e z de ~r em termos de λ e φ?
c) Seja d a distância entre dois pontos sobre a superfície terrestre. Use o teorema doscossenos para mostrar que distância δ sobre a superfície esférica entre esses mesmosdois pontos é dada por
δ = R⊕ cos−1(1− d2
2R2⊕
)Interprete os casos particulares d = 0 e d = 2R⊕.
d) Considerando R⊕ = 6378Km e os seguintes valores para as coordenadas geográ�casde Porto Alegre, Londres e Tóquio, construa uma tabela com os valores de λ e φ e ascoordenadas xyz em quilômetros de cada uma dessas cidades.
Localidade Latitude LongitudePorto Alegre 30◦ 01′ 58′′S 51◦13′ 48′′OLondres 51◦ 30′ 28′′N 0◦ 7′ 41′′OTóquio 35◦ 41′ 22′′N 139◦ 41′ 30′′L
Tabela 1: Coordenadas geográ�cas de algumas cidades.
e) Contrua uma tabela com as distâncias em linha reta e sobre a superfície da Terra entrecada uma dessas cidades.
f) As seguintes coordenadas indicam locais de grande importância cultural ou turística,identi�que-os:
Localidade x y z1 4192,872Km 168Km 4803,175Km2 1175,603Km 5550,889Km 2912,813Km3 3996,282Km -127,418Km 4969,143Km
Tabela 2: Coordenadas geográ�cas de três localidades incógnitas.
0.2. O ESPAÇO EUCLIDIANO TRIDIMENSIONAL E SUA NORMA 7
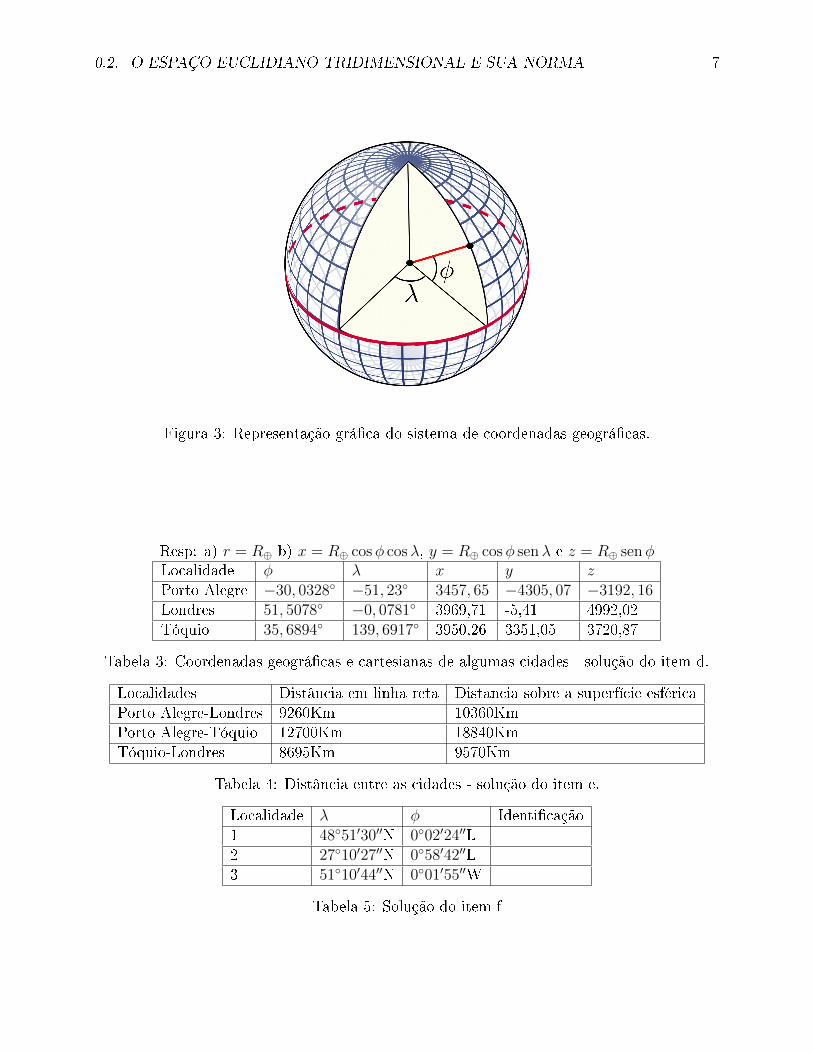
Figura 3: Representação grá�ca do sistema de coordenadas geográ�cas.
Resp: a) r = R⊕ b) x = R⊕ cosφ cosλ, y = R⊕ cosφ senλ e z = R⊕ senφLocalidade φ λ x y zPorto Alegre −30, 0328◦ −51, 23◦ 3457, 65 −4305, 07 −3192, 16Londres 51, 5078◦ −0, 0781◦ 3969,71 -5,41 4992,02Tóquio 35, 6894◦ 139, 6917◦ 3950,26 3351,05 3720,87
Tabela 3: Coordenadas geográ�cas e cartesianas de algumas cidades - solução do item d.
Localidades Distância em linha reta Distância sobre a superfície esféricaPorto Alegre-Londres 9260Km 10360KmPorto Alegre-Tóquio 12700Km 18840KmTóquio-Londres 8695Km 9570Km
Tabela 4: Distância entre as cidades - solução do item e.
Localidade λ φ Identi�cação1 48◦51′30′′N 0◦02′24′′L2 27◦10′27′′N 0◦58′42′′L3 51◦10′44′′N 0◦01′55′′W
Tabela 5: Solução do item f

8 CAPÍTULO 0. ÁLGEBRA VETORIAL
0.3 Ângulo entre vetores e o produto escalar
Na seção anterior, começamos a trabalhar com vetores no espaço euclidiano. No entanto, atéo momento não lidamos explicitamente com ângulos entre vetores. Introduziremos primeira-mente o conceito de produto escalar ou produto interno entre vetores. O produto escalar éuma operação que liga um par de vetores a um escalar. O produto escalar entre os vetores ~ue ~v é denotado por < ~u,~v > ou ~u · ~v e é de�nida no espaço euclidiano tridimensional como:
< ~u,~v >= ~u · ~v = u1v1 + u2v2 + u3v3 (15)
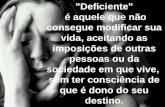
Figura 4: Lei dos cossenos.
Considere os vetores ~u, ~v e ~w relacionados por
~w = ~u− ~v.
Este trio de vetores pode ser intepretado como os trêslados de um triângulo como na �gura 4. Da lei doscossenos, sabemos que a seguinte relação é satisfeita:
w2 = u2 + v2 − 2uv cos θ
supondo u 6= 0 e v 6= 0, temos
cos θ =w2 − u2 − v2
2uv.
Usamos agora a de�nição de norma de um vetor dadaem (11):
u2 = u21 + u22 + u23v2 = v21 + v22 + v23w2 = w2
1 + w22 + w2
3 = (u1 − v1)2 + (u2 − v2)2 + (u3 − v3)2
Simpli�cando, temos:
cos θ =w2 − u2 − v2
2uv=u1v1 + u2v2 + u3v3
uv=~u · ~vuv
Esta última expressão nos permite escrever
~u · ~v = uv cos (~u,~v) (16)
onde cos (~u,~v) indica o cosseno do ângulo entre os vetores ~u e ~v.
Observação 0.2. Neste momento, o leitor deve observar que a de�nição que demos ori-ginalmente para o produto escalar em (15) dependia fortemente do sistema de coordenadasescolhido. No entanto, a identidade (16) mostra que o valor do produto escalar depende ape-nas da norma dos vetores envolvidos e do ângulo entre esses vetores, ou seja, (16) pode serusado como uma de�nição intrínseca (que não depende da escolha do sistema de coordenadas)de produto escalar. O produto escalar do vetor nulo ~0 por qualquer vetor é zero.

0.3. ÂNGULO ENTRE VETORES E O PRODUTO ESCALAR 9
O produto escalar satisfaz as seguintes propriedades:
~u · ~v = ~v · ~u, (Comutatividade) (17a)
~u · (α~v + β ~w) = α(~u · ~v) + β(~u · ~w), (Linearidade) (17b)
~u · ~u = u2, (Respeito à norma) (17c)
|~u · ~v| ≤ uv, (Desigualdade de Cauchy-Schwarz) (17d)
As propriedades (17a), (17b) e (17c) podem ser trivialmente demonstradas diretamente apartir da de�nição de produto escalar dada em (15).
Exercício 0.7. Demonstre essas três propriedades.
Observe que α(~u·~v) = (α~u)·~v pelo que podemos escrever α~u·~v sem risco de ambiguidade.
Exercício 0.8. Use (17a) e (17b) para mostrar a seguinte propriedade:
(α~u+ β~v) · ~w = α(~u · ~w) + β(~v · ~w)
A desigualdade de Cauchy-Schwarz (17d) pode ser demonstrada a partir de (16) uma vezque
−1 ≤ cos θ ≤ 1.
No entanto, uma demonstração puramente algébrica pode ser dada a partir das propriedades(17a), (17b) e (17c). Dada a beleza desta demonstração e da possibilidade de generalização,apresentamo-na a seguir:
Consideramos primeiramente os versores u e v de�nidos em (14) e calculamos
‖u+ v‖2 = (u+ v) · (u+ v) = 2 + 2u · v‖u− v‖2 = (u− v) · (u− v) = 2− 2u · v
onde usamos que u · u = v · v = 1 posto que a norma de um versor é sempre 1. Agoraobservamos que ‖u+ v‖2 ≥ 0 e ‖u− v‖2 ≥ 0, pelo que temos:
−1 ≤ u · v ≤ 1
O que implica |u · v| ≤ 1. Como ~u = uu e ~v = vv, temos
|~u · ~v| ≤ uv
Observamos que com uma demontração puramente algébrica para a desigualdade deCauchy-Schwarz, podemos derivar uma demonstração puramente algébrica da desigualdadetriangular (12b). Ver também a discussão do exercício 0.2. Para tal considere a seguinteidentidade:
‖~u+ ~v‖2 = (~u+ ~v) · (~u+ ~v) = u2 + 2~u · ~v + v2
Como ~u · ~v ≤ |~u · ~v| ≤ uv, temos:
‖~u+ ~v‖2 ≤ u2 + 2uv + v2 = (u+ v)2

10 CAPÍTULO 0. ÁLGEBRA VETORIAL
Extraindo a raiz quadrada de ambos os lados, temos:
‖~u+ ~v‖ ≤ (u+ v) = ‖~u‖+ ‖~v‖
Dois vetores não nulos ~u e ~v são dito ortogonais se o ângulo entre eles é 90◦, ou seja, secos (~u,~v) = 0. De (16), isto acontece quando ~u · ~v = 0. Usamos o símbolo ⊥ para denotar aortogonalidade:
~u⊥~v ⇐⇒ ~u · ~v = 0 (18)
Em especial os vetores unitários ~i, ~j e ~k são ortogonais, ou seja:
~i ·~j =~i · ~k = ~j · ~k = 0.
Exercício 0.9. Considere os vetores dados por ~u =~i+~j, ~v =~i+2~j e ~w = 13~i+ 1
2~j conforme
exercício 0.4. Calcule o ângulo entre esses vetores.
Resp: 18, 43◦, 11, 3◦ e 7, 13◦
Exercício 0.10. Mostre que se α e β são escalares diferentes de zero e ~u e ~v são vetores nãonulos, então
cos (α~u, β~v) = cos (~u,~v) .
Interprete geometricamente esta identidade.
Exercício 0.11. Mostre que se ~u = u1~i+ u2~j + u3~k então u1 = ~u ·~i, u2 = ~u ·~j e u3 = ~u · ~k.Conclua que
~u =(~u ·~i
)~i+
(~u ·~j
)~j +
(~u · ~k
)~k.
Exercício 0.12. Sejam ~u =√22
(~i+~j
)e ~v =
√22
(~i−~j
). Mostre que estes vetores são
unitários e ortogonais entre si. Encontre dois vetores unitários distintos ortogonais tanto a~u quanto a ~v.
Resp: −~k e ~k.
Exercício 0.13. Sejam ~u = 2~i+~j +~k e ~v = 2~i−~j −~k. Mostre que estes vetores ortogonaisentre si. Encontre dois vetores unitários distintos ortogonais tanto a ~u como a ~v.
Resp:√22
(~j − ~k
)e√22
(−~j + ~k
).
Exercício 0.14. Encontre três vetores ~u, ~v e ~w tais que:
a) (~u · ~v) ~w = ~0 mas ~u (~v · ~w) 6= ~0
b) (~u · ~v) ~w 6= ~u (~v · ~w) e ambos não nulos.
Exemplos de respostas: a) ~u =~i, ~v = ~j e ~w = ~j. b) ~u =~i, ~v =~i+~j e ~w = ~j.

0.4. O PRODUTO VETORIAL 11
Problema 0.4. Sejam os vetores ~u = cos(θ1)~i+ sen(θ1)~j e ~v = cos(θ2)~i+ sen(θ2)~j então
cos (~u,~v) = cos(θ1 − θ2).
Conclua que o ângulo θ entre ~u e ~v é dado por
θ =
{|θ1 − θ2|, |θ1 − θ2| ≤ 180◦
360◦ − |θ1 − θ2|, |θ1 − θ2| > 180◦
contanto que θ1 e θ2 estejam entre 0 e 360◦. Interprete geometricamente este resultado.
Problema 0.5. Seja ~u um vetor não nulo �xo e ~v um vetor de norma não nula �xa. Mostreque ‖~u+~v‖ tem um ponto de máximo quando u = v e um ponto de mínimo quando u = −v.Interprete o resultado geometricamente e compare com o problema (0.1).
Dica: ‖~u+ ~v‖2 = u2 + v2 + 2~u · ~v e (16).
0.4 O produto vetorial
Além do produto escalar entre vetores, de�nimos também o produto vetorial. Enquanto oproduto escalar de dois vetores é um escalar, o produto vetorial é um terceiro vetor. Oproduto vetorial entre ~u = u1~i+u2~j+u3~k e ~v = v1~i+ v2~j+ v3~k é denotado ~u×~v e é de�nidoem coordenadas cartesianas como:
~u× ~v = (u2v3 − u3v2)~i+ (u3v1 − u1v3)~j + (u1v2 − u2v1)~k (19)
A de�nição de produto vetorial pode parecer à primeira vista arbitrário e fortemente depen-dente do sistema de coordenadas escolhido. No entanto, mostraremos que o produto vetorialadmite uma formulação intrínseca, ou seja, que não depende do sistema de coordenadasescolhido. Ademais, veremos que tanto o produto escalar como o produto vetorial surgemnaturalmente do estudo da física clássica.
O produto vetorial possui as seguintes propriedades:
~u× ~v = −~v × ~u, (Anticomutatividade) (20a)
(α~u+ β~v)× ~w = α (~u× ~w) + β (~v × ~w) , (Linearidade à esquerda) (20b)
~u× (α~v + β ~w) = α (~u× ~v) + β (~u× ~w) , (Linearidade à direita) (20c)
(~u× ~v) · ~u = (~u× ~v) · ~v = 0, (Ortogonalidade) (20d)
‖~u× ~v‖ = uv sen(~u,~v). (Norma) (20e)
det (~u;~v; ~u× ~v) = u2v2 sen2(~u,~v) > 0. (Orientação dextrogira) (20f)
Nas duas últimas propriedades, sen(~u,~v) denota o seno do ângulo entre os vetores ~u e ~v.Observa-se que quando ~u ou ~v é nulo, este ângulo não está bem de�nido, estas identidadesdevem ser então interpretadas como ‖~u× ~v‖ = 0 e det (~u;~v; ~u× ~v) = 0.
A última propriedade signi�ca que o trio ~u, ~v e ~u× ~v forma um sistema dextrogiro.
Exercício 0.15. Mostre as propriedades (20a), (20b) e (20c).

12 CAPÍTULO 0. ÁLGEBRA VETORIAL
A propriedade da ortogonalidade pode ser demonstrada diretamente da de�nição de pro-duto vetorial e produto escalar:
(~u× ~v) · ~u =[(u2v3 − u3v2)~i+ (u3v1 − u1v3)~j + (u1v2 − u2v1)~k
] (u1~i+ u2~j + u3~k
)= (u2v3 − u3v2)u1 + (u3v1 − u1v3)u2 + (u1v2 − u2v1)u3 = 0
igualmente temos:
(~u× ~v) · ~v =[(u2v3 − u3v2)~i+ (u3v1 − u1v3)~j + (u1v2 − u2v1)~k
] (v1~i+ v2~j + v3~k
)= (u2v3 − u3v2) v1 + (u3v1 − u1v3) v2 + (u1v2 − u2v1) v3 = 0
Para provar a propriedade (20e), mostraremos primeiramente a seguinte (interessante) iden-tidade:
‖~u× ~v‖2 + |~u · ~v|2 = u2v2 (21)
Da de�nição de norma e de produto vetorial temos:
‖~u× ~v‖2 =∥∥∥(u2v3 − u3v2)~i+ (u3v1 − u1v3)~j + (u1v2 − u2v1)~k
∥∥∥2= (u2v3 − u3v2)2 + (u3v1 − u1v3)2 + (u1v2 − u2v1)2
=(u22v
23 − 2u2u3v2v3 + u23v
22
)+(u23v
21 − 2u1u3v1v3 + u21v
23
)+
(u21v
22 − 2u1u2v1v2 + u22v
21
). (22)
Da de�nição de norma e de produto escalar temos:
|~u · ~v|2 = (u1v1 + u2v2 + u3v3)2 = u21v
21 + u22v
22 + u23v
23 + 2u1u2v1v2 + 2u1u3v1v3 + 2u2u3v2v3.
Somando estas últimas duas expressões, simpli�cando e reagrupando termos, chegamos aoresultado desejado:
‖~u× ~v‖2 + |~u · ~v|2 = (u1v1 + u2v2 + u3v3)2
= u21v21 + u21v
22 + u21v
23 + u22v
21 + u22v
22 + u22v
23 + u23v
21 + u23v
22 + u23v
23
=(u21 + u22 + u23
) (v21 + v22 + v23
)= u2v2.
Agora que dispomos da identidade (21), usamos (16) para escrever
‖~u× ~v‖2 = u2v2 − |~u · ~v|2 = u2v2 − [uv cos (~u,~v)]2 = u2v2[1− cos2 (~u,~v)
]= u2v2 sen2 (~u,~v)
Extraímos a raiz quadrada, observando que sen (~u,~v) ≥ 0 e obtemos o resultado desejado.Um caso particular importante é quando os vetores ~u e ~v estão na mesma direção. Comosen 0 = sen 180◦ = 0, o produto vetorial de dois vetores paralelos é ~0.
Para demonstrar a propriedade (20f), calculamos o determinante envolvido
det (~u;~v; ~u× ~v) =
∣∣∣∣∣∣u1 v1 (u2v3 − u3v2)u2 v2 (u3v1 − u1v3)u3 v3 (u1v2 − u2v1)
∣∣∣∣∣∣=
(u21v
22 − u1u2v1v2
)+(u23v
21 − u1u3v1v3
)+(u22v
23 − u2u3v2v3
)−
(u1u2v1v2 − u22v21
)−(u1u3v1v3 − u21v23
)−(u2u3v2v3 − u23v22
)

0.4. O PRODUTO VETORIAL 13
Figura 5: Regra da mão direita.
Agora basta observar que esta expressãoé idêntica a (22), ou seja, ‖~u×~v‖2 e portantoo determinante det (~u;~v; ~u× ~v) é positivo.
A importância desta propriedade está nofato que se ~w = ~u × ~v então o trio de veto-res ~u, ~v e ~w forma um sistema dextrogiro.Além disso, por causa da propriedade (20d),~w deve ser ortogonal tanto aos vetores ~u,~v. Finalmente, observando a propriedade danorma (20e), podemos estabelecer a seguinteidentidade para o produto vetorial de doisvetores não colineares ~u e ~v:
~u× ~v = uv sen (~u,~v) e (23)
onde o versor e é ortogonal do plano gerado por ~u e ~v e forma um sistema dextrogiro comeles.
A norma do produto vetorial entre os vetores ~u e ~v pode ser interpretada como a áreado paralelogramo cujos lados são ~u e ~v (ver �gura 6. A direção do produto vetorial é entãoortogonal ao plano gerado por ~u e ~v e o sentido é dado pela regra da mão direita.
Figura 6: Interpretação geométrica do produto vetorial.
A de�nição de produto vetorial dada em (19) pode ser mais facilmente lembrada atravésdo seguinte determinante formal:
~u× ~v =
∣∣∣∣∣∣~i ~j ~ku1 u2 u3v1 v2 v3
∣∣∣∣∣∣ (24)
que pode ser calculado pela regra de Sarrus.

14 CAPÍTULO 0. ÁLGEBRA VETORIAL
O produto vetorial entre os vetores unitários~i, ~j e ~k pode ser obtido da de�nição (19) ouda caracterização geométrica do produto vetorial:
~i×~i = ~0, ~i×~j = ~k, ~i× ~k = −~j~j ×~i = −~k, ~j ×~j = ~0, ~j × ~k =~i
~k ×~i = ~j, ~k ×~j = −~i, ~k × ~k = ~0 (25)
Exemplo 0.1. Seja ~u =~i+ 2~j e ~v = 3~i− 2~j, calcule o vetor ~w = ~u× ~v.Solução 1 Calcularemos primeiramente usando o determinante (24):
~w =
∣∣∣∣∣∣~i ~j ~ku1 u2 u3v1 v2 v3
∣∣∣∣∣∣ =∣∣∣∣∣∣~i ~j ~k1 2 03 −2 0
∣∣∣∣∣∣ =~i(0− 0) +~j(0− 0) + ~k(−2− 6) = −8~k
Solução 2 Calcularemos usando as propriedades (20) e as relações (25):
~w = ~u× ~v =(~i+ 2~j
)×(3~i− 2~j
)= 3(~i×~i)− 2(~i×~j) + 6(~j ×~i)− 4(~j ×~j)
= 3~0− 2~k − 6~k − 4~0 = −8~k
Exercício 0.16. Refaça os exercícios 0.12 e 0.13 usando o conceito de produto vetorial.
Exercício 0.17. Encontre três vetores ~u, ~v e ~w tais que ~u× (~v × ~w) 6= (~u× ~v)× ~w.
Exemplo de resposta: ~u =~i, ~v =~i e ~w = ~k.
Exercício 0.18. Simpli�que as seguintes expressões:
a) ~u× ~u
b) ~u× u
c) ~u · ~u
d) ~u · u
e) (~u+ ~v) · (~u+ ~v)
f) (~u+ ~v)× (~u+ ~v)
g) (~u− ~v) · (~u− ~v)
h) (~u− ~v)× (~u− ~v)
i) (~u+ ~v) · (~u− ~v)
j) (~u+ ~v)× (~u− ~v)Resp: ~0,~0,u2,u,u2 + 2~u · ~v + v2, ~0, u2 − 2~u · ~v + v2, ~0, u2 − v2, 2~v × ~u
Problema 0.6. Mostre que ~u · (~v × ~w) = det (~u;~v; ~w). Conclua que o trio de vetores ~u, ~v e~w forma um sistema dextrogiro se ~u · (~v × ~w) > 0 e levogiro se ~u · (~v × ~w) < 0. Interpretegeometricamente.

0.5. SISTEMA DE COORDENADAS CILÍNDRICAS 15
0.5 Sistema de coordenadas cilíndricas
Figura 7: Representação de um ponto de co-ordenadas cilíndricas.
No sistema de coordenadas cilíndricas, umponto P é representado pelas coordenadas ρ,φ e z. A coordenada z é a mesma do sistemade coordenadas retangulares. A coordenadaρ indica a distância entre a origem e a pro-jeção Q de P sob o eixo xy. Finalmente φ éo ângulo entre o semi-eixo x > 0 e o pontoQ. Ver �gura 7. É fácil ver que
x = ρ cosφ (26a)
y = ρ senφ (26b)
ondeρ =
√x2 + y2 (27)
A coordenadas ρ, φ e z são comumente de-notaminadas de �distância radial�, �azimute�e �altura�.
As equações (26) podem ser reescritascomo
cosφ =x
ρ=
x√x2 + y2
(28a)
senφ =y
ρ=
y√x2 + y2
(28b)
Exercício 0.19. Os seguintes pontes são dados em coordenadas cartesianas, encontre suasrepresentações em coordenas cilíndricas:
a) 〈1, 1, 1〉
b) 〈1,−1, 1〉
c) 〈−1, 1, 1〉
d) 〈−1,−1, 1〉
Resp:(√
2, π4, 1),(√
2, 5π4, 1),(√
2, 3π4, 1)e(√
2, 7π4, 1).
Exercício 0.20. Encontre uma expressão para distância de um ponto à origem em coorde-nadas cilíndricas
Resp:√ρ2 + z2