UM PROCEDIMENTO NUMÉRICO PARA A DETERMINAÇÃO DE … · deformações com as tensões por meio da...
20
ISSN 1809-5860 Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009 UM PROCEDIMENTO NUMÉRICO PARA A DETERMINAÇÃO DE PARÂMETROS ELÁSTICOS Edmar Borges Theóphilo Prado 1 & Adair Roberto Aguiar 2 Resumo A teoria de elasticidade linear clássica é utilizada no modelamento de problemas da Física Médica relacionados com a determinação de parâmetros elásticos de tecidos biológicos a partir da medição dos deslocamentos, ou, das deformações. Baseados em observações experimentais, as quais revelam que os tecidos biológicos anômalos têm comportamento mecânico diferente dos tecidos biológicos sadios, os pesquisadores têm modelado estes tecidos como sólidos elástico-lineares, isotrópicos, heterogêneos e incompressíveis. Neste trabalho, analisamos uma classe de problemas planos relacionados à determinação dos parâmetros elásticos de tecidos biológicos e propomos um procedimento numérico para obter soluções aproximadas destes problemas. Palavras chaves: Elasticidade linear. Elastografia. Equação hiperbólica. Problema inverso. Método dos elementos finitos. A NUMERICAL PROCEDURE TO DETERMINE ELASTIC PARAMETERS Abstract The classical linear elasticity theory is used in the modeling of problems of Medical Physics related to the determination of elastic parameters of biological tissues from the measurement of either displacements or strains. Based on experimental observations, which indicate that the abnormal biological tissues have different mechanical behavior from normal biological tissues, researchers have modeled these tissues as incompressible, heterogeneous, and isotropic linear elastic solid. In this work a class of plane problems related to the determination the elastic parameters of biological tissues is examined and a numerical procedure to obtain approximate solutions of these problems is proposed. Keywords: Linear elasticity. Elastography. Hyperbolic equation. Inverse problem. Finite element method. 1 INTRODUÇÃO Observações experimentais revelam que os tecidos biológicos anômalos têm comportamento mecânico diferente dos tecidos biológicos sadios (Fung, 2004; Ophir et al, 1991; Liu et al, 2003). Em particular, Sarvazyan (1993) e Krouskop et al (1998) relatam que os tecidos anômalos apresentam maior rigidez (são mais firmes) do que os tecidos sadios. O comportamento diferenciado entre os tecidos anômalos e sadios é utilizado no diagnóstico do câncer de mama: cerca da metade de todos os casos de câncer de mama detectados nos Estados Unidos no período 1988-1990 foram descobertos pelo próprio paciente ao apalpar os seios e constatar a presença de um nódulo em seus seios (Reeves et al , 1995). De fato, o exame de toque ainda é o método padrão utilizado por profissionais da área médica para determinar a presença de lesões na mama e próstata. Em muitos casos, no entanto, mesmo havendo diferença de rigidez entre o tecido lesionado e o tecido sadio, a lesão pode não ser detectada devido ao seu tamanho reduzido, ou, devido à sua localização em regiões profundas do corpo. A 1 Mestre em Engenharia de Estruturas - EESC-USP, [email protected] 2 Professor do Departamento de Engenharia de Estruturas da EESC-USP, [email protected]
Transcript of UM PROCEDIMENTO NUMÉRICO PARA A DETERMINAÇÃO DE … · deformações com as tensões por meio da...

ISSN 1809-5860
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
UM PROCEDIMENTO NUMÉRICO PARA A DETERMINAÇÃO DE PARÂMETROS ELÁSTICOS
Edmar Borges Theóphilo Prado1 & Adair Roberto Aguiar2
R e s u m o A teoria de elasticidade linear clássica é utilizada no modelamento de problemas da Física Médica relacionados com a determinação de parâmetros elásticos de tecidos biológicos a partir da medição dos deslocamentos, ou, das deformações. Baseados em observações experimentais, as quais revelam que os tecidos biológicos anômalos têm comportamento mecânico diferente dos tecidos biológicos sadios, os pesquisadores têm modelado estes tecidos como sólidos elástico-lineares, isotrópicos, heterogêneos e incompressíveis. Neste trabalho, analisamos uma classe de problemas planos relacionados à determinação dos parâmetros elásticos de tecidos biológicos e propomos um procedimento numérico para obter soluções aproximadas destes problemas. Palavras chaves: Elasticidade linear. Elastografia. Equação hiperbólica. Problema inverso. Método dos elementos finitos.
A NUMERICAL PROCEDURE TO DETERMINE ELASTIC PARAMETERS
A b s t r a c t The classical linear elasticity theory is used in the modeling of problems of Medical Physics related to the determination of elastic parameters of biological tissues from the measurement of either displacements or strains. Based on experimental observations, which indicate that the abnormal biological tissues have different mechanical behavior from normal biological tissues, researchers have modeled these tissues as incompressible, heterogeneous, and isotropic linear elastic solid. In this work a class of plane problems related to the determination the elastic parameters of biological tissues is examined and a numerical procedure to obtain approximate solutions of these problems is proposed. Keywords: Linear elasticity. Elastography. Hyperbolic equation. Inverse problem. Finite element method.
1 INTRODUÇÃO
Observações experimentais revelam que os tecidos biológicos anômalos têm comportamento mecânico diferente dos tecidos biológicos sadios (Fung, 2004; Ophir et al, 1991; Liu et al, 2003). Em particular, Sarvazyan (1993) e Krouskop et al (1998) relatam que os tecidos anômalos apresentam maior rigidez (são mais firmes) do que os tecidos sadios. O comportamento diferenciado entre os tecidos anômalos e sadios é utilizado no diagnóstico do câncer de mama: cerca da metade de todos os casos de câncer de mama detectados nos Estados Unidos no período 1988-1990 foram descobertos pelo próprio paciente ao apalpar os seios e constatar a presença de um nódulo em seus seios (Reeves et al , 1995). De fato, o exame de toque ainda é o método padrão utilizado por profissionais da área médica para determinar a presença de lesões na mama e próstata. Em muitos casos, no entanto, mesmo havendo diferença de rigidez entre o tecido lesionado e o tecido sadio, a lesão pode não ser detectada devido ao seu tamanho reduzido, ou, devido à sua localização em regiões profundas do corpo. A
1 Mestre em Engenharia de Estruturas - EESC-USP, [email protected] 2 Professor do Departamento de Engenharia de Estruturas da EESC-USP, [email protected]
Edmar Borges Theóphilo Prado & Adair Roberto Aguiar
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
122
presença de lesões no interior do corpo pode não ser detectada mesmo com o auxílio dos exames de ultra-som convencionais (Ophir et al, 2001). Uma técnica utilizada na Física Médica para a detecção de tumores cancerígenos consiste em pressionar levemente uma sonda ultra-sônica sobre uma superfície externa do corpo humano, ocasionando deformação da parte do corpo localizada em uma região próxima da área pressionada (Ophir et al, 2002). A deformação deve ser pequena, inferior a 2,5%, para que o comportamento viscoso do tecido biológico seja ignorado e este possa ser tratado como um sólido elástico-linear (Mridha e Ödman, 1986). Ao se medir o campo de deslocamento nesta região, determina-se o campo de deformação infinitesimal, o qual é proporcional à rigidez interna do tecido. Portanto, ao relacionarmos as deformações com as tensões por meio da Lei de Hooke Generalizada e ao impormos a condição de que o corpo deve satisfazer as leis de balanço da Mecânica do Contínuo, obtemos expressões para a determinação dos parâmetros elásticos da parte do corpo sob análise. Os valores destes parâmetros dependem do ponto material; especialmente se os tumores cancerígenos estiverem dispersos no tecido biológico sadio. Em Mecânica, tratamos os tumores como inclusões dispersas em uma matriz, a qual identificamos como sendo o tecido biológico sadio. Em geral, o problema da determinação dos parâmetros elásticos é mal-posto, pois as equações governantes são do tipo hiperbólico e não se conhecem os valores destes parâmetros no contorno do corpo. Em particular, Barbone e Bamber (2002) e Barbonne e Gokhale (2004) investigam problemas de deformação plana para materiais elástico-lineares, isotrópicos, heterogêneos e incompressíveis. Eles observam que o problema da determinação do módulo de elasticidade ao cisalhamento μ é governado por uma equação diferencial hiperbólica de segunda ordem. Os coeficientes desta equação são dados em termos das deformações inferidas de medições experimentais obtidas de ensaios quase-estáticos. Os autores observam também que μ não pode ser determinado de um único experimento. Se, no entanto, dois campos de deslocamento forem medidos de dois experimentos distintos realizados sobre o mesmo corpo, então o módulo μ é determinado com a exceção de quatro constantes arbitrárias. Utilizamos este resultado para propor um procedimento numérico que forneça uma distribuição aproximada de μ em todo o corpo elástico.
O procedimento numérico está baseado em uma formulação variacional das equações governantes juntamente com o Método dos Elementos Finitos (MEF). O procedimento consiste em aproximar μ e a pressão reativa π por funções contínuas por partes, as quais estão definidas sobre todo o domínio de um corpo elástico-linear, isotrópico e incompressível. Admitem-se conhecidos os campos de deslocamento do corpo e as forças resultantes externas atuantes sobre partes complementares do contorno do corpo. As funções que aproximam μ e π , as quais contêm coeficientes a determinar, são então substituídas em um sistema de equações oriundo do MEF e nas expressões que relacionam as forças resultantes externas, as quais são conhecidas, e internas, as quais dependem de μ e π . Obtém-se então um sistema de equações lineares para a determinação dos coeficientes das funções aproximadoras. Em geral, este sistema é sobre-determinado e requer a utilização de pacotes numéricos que possibilitem investigar todas as possíveis soluções. Os resultados obtidos indicam que o sistema possui uma única solução com significado físico. Na Seção 2 apresentamos duas classes distintas de problemas planos de equilíbrio. Primeiramente, consideramos um problema direto, o qual consiste na determinação do campo de deslocamento em um sólido elástico-linear, isotrópico e quase-incompressível. Supondo que este campo de deslocamento aproxima bem o campo de deslocamento em um sólido incompressível, consideramos a seguir um problema inverso, o qual consiste na determinação de μ e π neste sólido. Admitindo que estes campos são suaves, eliminamos π das equações governantes e obtemos uma única equação governante para μ . Utilizando mudança de variáveis, mostramos que esta equação é hiperbólica e que não fornece o módulo μ de maneira única a partir de um único campo de

Um procedimento numérico para a determinação de parâmetros elásticos
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
123
deslocamento conhecido. Ilustramos este fato por meio de um exemplo considerado por Barbonne e Gokhale (2004). A seguir, apresentamos resultados destes autores que são fundamentais para o sucesso do procedimento numérico proposto e que dizem respeito ao número de ensaios que devem ser realizados para a determinação do módulo μ . Neste trabalho, consideramos dois ensaios que podem ser realizados em laboratório. Ambos os ensaios são realizados sobre um cilindro reto, longo e de secção transversal retangular, o qual está sob estado plano de deformação (EPD) perpendicular ao seu eixo. O primeiro ensaio é biaxial de tração-compressão e consiste em tracionar dois lados do cilindro enquanto os outros dois lados são comprimidos. O segundo ensaio é de cisalhamento e consiste na aplicação de forças tangenciais sobre os lados do cilindro. Fechando a Seção 2, utilizamos o MEF juntamente com o PTV para apresentar as formulações dos problemas discretos correspondentes aos problemas direto e inverso. Na Seção 3 apresentamos resultados numéricos obtidos das soluções destes problemas discretos. Primeiramente, resolvemos dois problemas diretos discretos para simular numericamente os ensaios biaxial de tração-compressão e de cisalhamento. Utilizamos então os campos de deslocamento e as resultantes de forças sobre partes complementares do contorno do sólido como dados de entrada na formulação do problema inverso discreto, cuja solução permite reconstruir de forma aproximada a distribuição de μ sobre todo o sólido. Associando cores aos valores numéricos obtidos para μ , mostramos graficamente que os resultados numéricos estão de muito bom acordo com os resultados analíticos correspondentes. Na Seção 4 apresentamos conclusões sobre este trabalho e na Seção 6 apresentamos as referências bibliográficas.
2 FORMULAÇÕES DOS PROBLEMAS DIRETO E INVERSO
2.1 Formulações fortes dos problemas direto e inverso
Seja B uma região regular e compacta em 2 e seja X um ponto material pertencente a B.
Uma deformação de B é um mapeamento suave 2: →y B com det 0∇ >y , onde ( ) ( ) /∇ • = ∂ • ∂X .
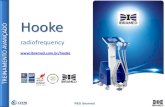
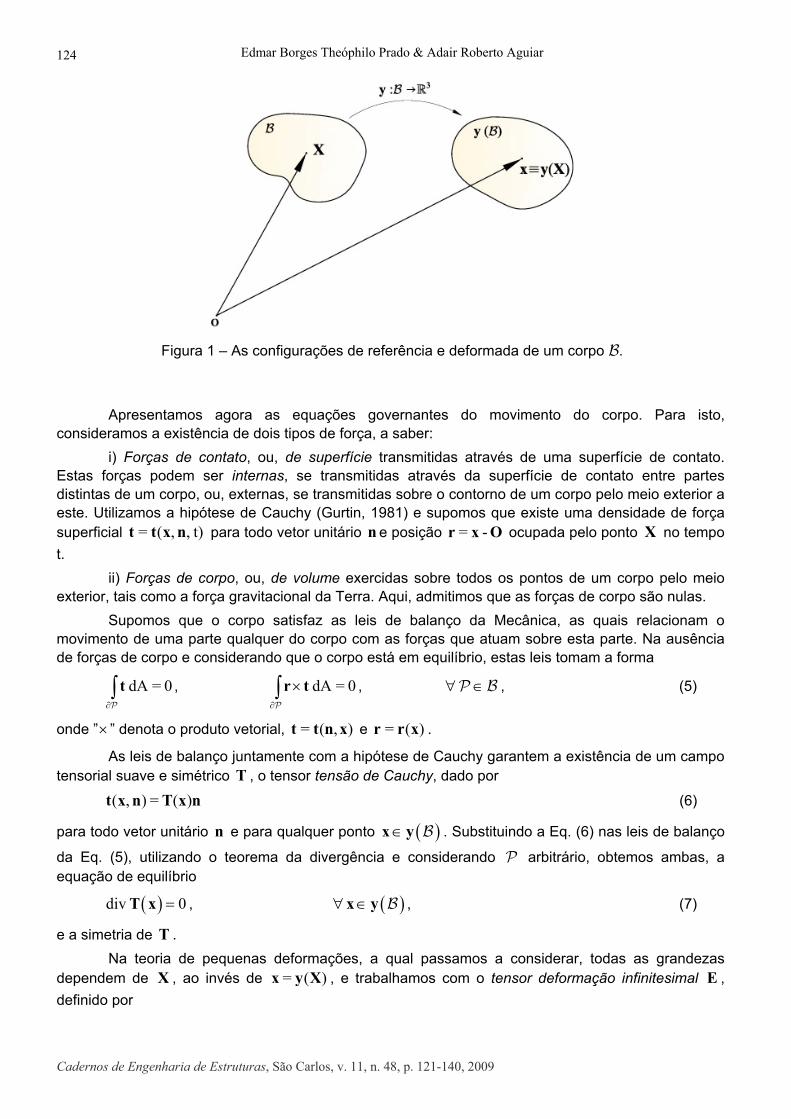
O ponto = ( )x y X é o lugar ocupado por X na deformação y , conforme ilustrado na Figura 1. Observe desta figura que a posição de x é dada por = - r x O .
O campo
= ∇F y (1)
é um membro do conjunto L de todas as transformações lineares de 2 em 2 e é conhecido como
o gradiente de deformação. Se P é uma parte de B com dimensões infinitesimais, então det F é a
razão entre o volume de ( ) y B e o volume de P e representa o valor local da dilatação volumétrica de
B. A deformação é isocórica se
det - 1 = 0F . (2)
Em termos do campo de deslocamento 2: →u B , definido por
=u y - X , (3)
obtemos da Eq. (1) e Eq.(3) que
= ∇F 1 + u . (4)
Edmar Borges Theóphilo Prado & Adair Roberto Aguiar
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
124
Figura 1 – As configurações de referência e deformada de um corpo B.
Apresentamos agora as equações governantes do movimento do corpo. Para isto, consideramos a existência de dois tipos de força, a saber: i) Forças de contato, ou, de superfície transmitidas através de uma superfície de contato. Estas forças podem ser internas, se transmitidas através da superfície de contato entre partes distintas de um corpo, ou, externas, se transmitidas sobre o contorno de um corpo pelo meio exterior a este. Utilizamos a hipótese de Cauchy (Gurtin, 1981) e supomos que existe uma densidade de força superficial = ( , , t)t t x n para todo vetor unitário n e posição = - r x O ocupada pelo ponto X no tempo t. ii) Forças de corpo, ou, de volume exercidas sobre todos os pontos de um corpo pelo meio exterior, tais como a força gravitacional da Terra. Aqui, admitimos que as forças de corpo são nulas. Supomos que o corpo satisfaz as leis de balanço da Mecânica, as quais relacionam o movimento de uma parte qualquer do corpo com as forças que atuam sobre esta parte. Na ausência de forças de corpo e considerando que o corpo está em equilíbrio, estas leis tomam a forma
dA = 0∂∫ tP
, dA = 0∂
×∫ r tP
, ∀ ∈P B , (5)
onde ”× ” denota o produto vetorial, = ( , )t t n x e = ( )r r x .
As leis de balanço juntamente com a hipótese de Cauchy garantem a existência de um campo tensorial suave e simétrico T , o tensor tensão de Cauchy, dado por
( , ) = ( )t x n T x n (6)
para todo vetor unitário n e para qualquer ponto ( )∈x y B . Substituindo a Eq. (6) nas leis de balanço
da Eq. (5), utilizando o teorema da divergência e considerando P arbitrário, obtemos ambas, a equação de equilíbrio
( )div 0=T x , ( )∀ ∈x y B , (7)
e a simetria de T . Na teoria de pequenas deformações, a qual passamos a considerar, todas as grandezas dependem de X , ao invés de = ( )x y X , e trabalhamos com o tensor deformação infinitesimal E , definido por
Um procedimento numérico para a determinação de parâmetros elásticos
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
125
( )T1 +2s
⎡ ⎤∇ ≡ ∇ ∇⎣ ⎦E u u u . (8)
Neste caso, det F é aproximado por tr div ≡E u e a condição da Eq. (2) é substituída por
tr = 0E . (9)
Além disso, a Eq. (7) fica
( )div 0=T X , ∀ ∈X B . (10)
Na teoria da elasticidade linear clássica, a tensão T é proporcional à deformação E e, no caso de um material isotrópico e compressível, esta proporcionalidade é expressa pela Lei de Hooke Generalizada
( ) ( ) ( ) ( ) ( )λ tr + 2μ=T X X E X X E X , (11)
onde λ e 0μ > são as constantes de Lamé, as quais podem depender do ponto X . Estas constantes devem satisfazer a desigualdade clássica 3 2 0λ + μ > . A constante μ é também chamada módulo de elasticidade ao cisalhamento. Se λ μ , dizemos que o material é quase-incompressível.
Neste trabalho, estamos interessados na determinação das constantes elásticas de um corpo incompressível. Este corpo oferece uma resistência interna a mudanças locais de volume ao ser deformado. Neste caso, a relação constitutiva da Eq. (11) é substituída por
( ) ( ) ( ) ( ) + 2μ= −πT X X 1 X E X , (12)
onde 1 é o tensor identidade e π é chamado parte reativa de T , ou também, pressão reativa. Aqui, qualquer deformação infinitesimal dada pela Eq. (8) deve satisfazer a restrição da Eq.(9). Além disso, observe da Eq. (12) que a tensão T é determinada da deformação E e do tensor esférico arbitrário
−π1 . Substituindo a Eq. (12) na Eq. (10), obtemos a equação
( ) ( )( )2div = 0−∇π + μ X E X , ∀ ∈X B . (13)
Sejam agora gΓ e uΓ partes regulares do contorno de B , ∂B , tais que
g u=∂ Γ ∪ ΓB , o o
g uΓ ∩ Γ = ∅ , (14)
onde oΓ denota o aberto de Γ . Admitimos que
= T n g sobre gΓ , (15)
= u u sobre uΓ , (16)
onde g e u são campos suaves definidos sobre as respectivas partes de ∂B . Utilizamos Eq. (8), Eq.(9) e Eq. (13) a Eq.(16) para formular dois problemas distintos. O primeiro problema, chamado problema direto, consiste em determinar os campos de deslocamento
2: →u B e de pressão :π →B que satisfaçam ambas, a restrição cinemática, Eq. (9), e a equação de equilíbrio Eq. (13), onde E é dado pela Eq. (8) e μ é conhecido, juntamente com as condições de contorno Eq. (15) e Eq. (16). Se uΓ = ∅ , então g deve satisfazer a condição para equilíbrio global, dada por
dA = 0∂∫ tB
, (17)
a qual é necessária para a existência de solução do problema de valor de contorno enunciado acima. O segundo problema, chamado problema inverso, consiste em determinar o módulo de elasticidade ao cisalhamento :μ →B e o campo de pressão :π →B que satisfaçam a equação

Edmar Borges Theóphilo Prado & Adair Roberto Aguiar
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
126
de equilíbrio Eq. (13), onde E está relacionado a um campo de deslocamento u por meio da Eq. (8), sendo u conhecido. Obviamente, E satisfaz a restrição cinemática Eq. (9) e u satisfaz a condição da Eq.(16). Admitimos, no entanto, que a condição de contorno da Eq. (15) não é conhecida. As formulações dos problemas direto e inverso são chamadas formulações fortes, pois as equações governantes destes problemas devem ser satisfeitas em todos os pontos de B juntamente com o seu contorno ∂B . Na próxima seção apresentamos uma formulação integral aproximada do problema direto, a qual é válida para materiais quase-incompressíveis, que permite construir um procedimento numérico simples e eficiente para o cálculo de u .
2.2 A formulação fraca do problema direto
Seja ( ) 2L B o conjunto de todas as funções quadrado-integráveis dado por
( ) { }0: ;ϕ ϕ= → < ∞ 2L B B , (18)
onde a norma 0
• é dada por ( )1/ 2
1/ 2 2
00, dAϕ ϕ ϕ ϕ
⎛ ⎞⎡ ⎤≡ ⎜ ⎟⎣ ⎦
⎝ ⎠∫B
. Seja ( )( )21H B um espaço de Hilbert
definido por
( )( ) { }2 21
: ;= → < ∞v v1H B B , (19)
onde a norma 1
• é dada por ( ) ( )1/ 2
1/ 2
11, dA
⎛ ⎞≡ ⋅ ∇ ⋅∇⎜ ⎟
⎝ ⎠∫v v v v v + v vB
. Seja ( )( )2∈u 1H B um
deslocamento cinematicamente admissível, de modo a satisfazer a Eq. (16), e seja ( )( )2∈v 1H B uma
variação admissível que satisfaça = v 0 sobre uΓ . Sejam também A o conjunto de todos os deslocamentos admissíveis e V o conjunto de todas as variações admissíveis. Utilizamos as definições acima para obter a forma integral das equações Eq. (9) e Eq. (10). Para isto, tomamos o produto interno da Eq. (10) com um elemento arbitrário ∈v V , integramos sobre
2⊂B e aplicamos o teorema da divergência juntamente com a Eq. (15) sobre a equação resultante. Além disso, multiplicamos a Eq. (9) por um elemento arbitrário ( )p ∈ 2L B e integramos a equação
resultante sobre 2⊂B . O problema direto pode então ser reformulado como segue: Achar ∈u A e ( )π∈ 2L B tal que
( ) ( ) ( )a , b , ,− π =u v v g v , ∀ ∈v V , (20)
( )b p, 0=u , ( )p∀ ∈ 2L B , (21)
onde
( ) s sa , 2 dAμ ∇ ⋅∇∫u v u v B
, ( ) sb p, p tr dA ∇∫u u B
. (22)
A formulação acima é chamada fraca, pois as equações Eq.(20) e Eq.(21) devem ser satisfeitas no sentido de uma integral sobre todo o domínio B . Introduzimos agora uma formulação alternativa da Eq. (20) a Eq. (22) que fornece um procedimento numérico simples e eficiente para o cálculo aproximado de u e π . Para isto, seja
( ) 1c , p p dA2
π π ∫ B
. (23)
Para 0ε > , considere o problema de achar ε ∈u A e ( )επ ∈ 2L B tal que
Um procedimento numérico para a determinação de parâmetros elásticos
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
127
( ) ( ) ( )a , b , ,ε ε− π =u v v g v , ∀ ∈v V , (24)
( ) ( ) c , p + b p, 0ε εε π =u , ( )p∀ ∈ 2L B , (25)
Uma vez que p é arbitrário, resolvemos a segunda equação para επ e substituímos a expressão resultante na primeira equação. Deste modo, obtemos o problema de achar ε ∈u A tal que
( ) ( ) ( )a , d , ,ε ε+ =u v u v g v , ∀ ∈v V , (26)
onde
( ) ( )( )s s2d , tr tr dAε εε
∇ ∇∫u v u v B
. (27)
A formulação deste problema é equivalente à formulação fraca do problema de valor de contorno para um sólido elástico-linear quase-incompressível, para o qual T é dado pela Eq. (11). O módulo λ na Eq. (11) é considerado constante e igual a 2 / ε neste trabalho. É bem conhecido da teoria de elasticidade linear clássica que para 0ε > o problema de achar ambos, ε ∈u A que satisfaça a Eq.
(26) juntamente com a Eq. (27) e ( )επ ∈ 2L B que satisfaça a Eq. (25), tem uma única solução que
converge para a solução ( ), πu da Eq. (20) a Eq. (22) à medida que 0ε → .
2.3 O Problema inverso
Na Seção 2.3.1 discutimos alguns aspectos relacionados à unicidade de solução do problema inverso descrito no final da Seção 2.1. Na Seção 2.3.2 apresentamos a formulação fraca deste problema inverso.
2.3.1 Considerações sobre a unicidade de solução
Admitimos que B é a secção transversal de um cilindro reto e longo sob estado plano de
deformação (EPD) paralelo ao plano desta secção. Admitimos também que ambos, o módulo de elasticidade ao cisalhamento :μ →B e a pressão :π →B , são campos suaves.
Seja então ( )1 2 3, ,e e e uma base ortonormal em 3 associada a um sistema de coordenadas
cartesianas retangulares com a origem em O (sistema CCR). Os vetores 1e , 2e são paralelos ao
plano que contém B enquanto que 3e é paralelo ao eixo do cilindro reto. Neste sistema de
coordenadas, um ponto do cilindro é representado por 3 3 + ξX e , onde 1 1 2 2 = + ξ ξ ∈X e e B e iξ ∈ ,
i 1, 2,3= . Além disso, 1 1 2 2 = υ υ+u e e , onde iυ ∈ , i 1, 2= . Segue de (1.8) que 2
ij i ji, j 1
= =
ε ⊗∑E e e ,
onde i j⊗e e é o produto tensorial entre 1e e 2e , o qual é definido por ( )i j k j k i⊗ = δe e e e , e
jiij
j i
12
υυξ ξ
⎛ ⎞∂ ∂ ε +⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠
. Segue da Eq. (9) que 22 11ε ε= - , uma vez que o cilindro está sob EPD.
Tomando o rotacional da Eq. (13), eliminamos π e obtemos a equação diferencial
[ ] ( ) ( )2 2 2
12 112 21 2 1 2
L 2 0⎛ ⎞∂ ∂ ∂
μ − μ ε − μ ε =⎜ ⎟∂ξ ∂ξ ∂ξ ∂ξ⎝ ⎠, (28)
Edmar Borges Theóphilo Prado & Adair Roberto Aguiar
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
128
onde [ ]L μ é um operador linear em μ .
Agora, consideramos uma transformação inversível de coordenadas, possivelmente não-linear, dada por ( )i i 1 2
ˆ ,ξ = ξ η η , i 1, 2= , onde ( )1 2,η η são as coordenadas em um novo sistema, de
modo que ( )i i 1 2,η = η ξ ξ , i 1, 2= . Introduzindo esta transformação na Eq. (28), obtemos
[ ]2 2 2
1 1 1 112 11 12 2
1 1 2 2 1
ˆˆ ˆ ˆˆL 2⎡ ⎤⎛ ⎞ ⎛ ⎞∂η ∂η ∂η ∂η ∂ μ⎢ ⎥μ ε − ε − ε +⎜ ⎟ ⎜ ⎟∂ξ ∂ξ ∂ξ ∂ξ ∂η⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
2 2 22 2 2 2
12 11 12 21 1 2 2 2
ˆˆ ˆ ˆ2⎡ ⎤⎛ ⎞ ⎛ ⎞∂η ∂η ∂η ∂η ∂ μ⎢ ⎥ε − ε − ε +⎜ ⎟ ⎜ ⎟∂ξ ∂ξ ∂ξ ∂ξ ∂η⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
[ ]2
2 1 1 2 2 1 2 112 11 12 1
1 1 1 2 1 2 2 2 1 2
ˆˆ ˆ ˆ ˆ2 L⎡ ⎤⎛ ⎞∂η ∂η ∂η ∂η ∂η ∂η ∂η ∂η ∂ μ ε − ε + − ε + μ⎢ ⎥⎜ ⎟∂ξ ∂ξ ∂ξ ∂ξ ∂ξ ∂ξ ∂ξ ∂ξ ∂η ∂η⎝ ⎠⎣ ⎦
, (29)
onde ( )1 2ˆ ,μ = μ η η , ( )ij ij 1 2ˆ ,ε ε η η = , i, j 1, 2= , e [ ]1 ˆL μ é um operador linear que contém somente
termos de ordem inferior a 2 em μ̂ . Admitindo que 12ˆ 0ε ≠ , examinamos o caso em que os dois primeiros coeficientes da expressão Eq. (29) são nulos, ou seja, examinamos a equação
2 2
i i i i12 11 12
1 1 2 2
ˆ ˆ ˆ2 0⎛ ⎞ ⎛ ⎞∂η ∂η ∂η ∂η
ε − ε − ε =⎜ ⎟ ⎜ ⎟∂ξ ∂ξ ∂ξ ∂ξ⎝ ⎠ ⎝ ⎠, i 1, 2= . (30)
As soluções desta equação são dadas por
i i 11
1 2 12
ˆˆ
∂η ∂η ε ± Δ=
∂ξ ∂ξ ε, ( ) ( )2 2
11 12ˆ ˆΔ ε + ε , i 1, 2= . (31)
O operador L é chamado hiperbólico se 0Δ > (Weinberger, 1965). Observe da Eq. (31) juntamente com o Jacobiano da transformação de coordenadas que esta condição é necessária para que a
transformação seja inversível. Uma vez que 2
ij i ji, j 1
= =
ε ⊗ ≠∑E e e 0 , 0Δ > e, portanto, a equação que
governa a distribuição de μ no cilindro, dada pela Eq. (28), é hiperbólica. Analisaremos agora algumas conseqüências desta conclusão. Sem perda de generalidade, reescrevemos a Eq. (31) na forma
1 1 11
1 2 12
ˆˆ
∂η ∂η ε + Δ=
∂ξ ∂ξ ε, 2 2 11
1 2 12
ˆˆ
∂η ∂η ε − Δ=
∂ξ ∂ξ ε. (32)
Ao longo de uma reta i iη = η , i 1, 2= , onde iη ∈ é constante, temos que
i ii 1 2
1 2
d d d 0∂η ∂ηη = ξ + ξ =
∂ξ ∂ξ. Segue desta expressão que
i i 2
1 2 1
d d
∂η ∂η ξ= −
∂ξ ∂ξ ξ, i 1, 2= . (33)
Substituindo a Eq.(33) na Eq. (32), obtemos
2 11
1 12
d d
ξ ε + Δ= −
ξ ε, 2 11
1 12
d d
ξ ε − Δ= −
ξ ε, (34)

Um procedimento numérico para a determinação de parâmetros elásticos
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
129
onde Δ é dado pela Eq. (31.b) e ( )ij ij 1 2,ε = ε ξ ξ . As Eq. (34.a) e Eq. (34.b) são equações diferenciais
ordinárias de primeira ordem em uma das variáveis, digamos, 2ξ . Integrando a Eq. (34.a) e a Eq.
(34.b) com respeito à outra variável, 1ξ , obtemos as curvas ( )2 21 1ξ = ξ ξ e ( )2 22 1ξ = ξ ξ , as quais
correspondem às retas 1 1η = η e 2 2η = η , respectivamente. As Eq. (34) fornecem também as
inclinações das retas tangentes às curvas ( )2 21 1ξ = ξ ξ e ( )2 22 1ξ = ξ ξ . Denotamos por 1β e 2β os ângulos correspondentes a estas inclinações. Por outro lado, as deformações principais de E em um dado ponto 1 1 2 2 = ξ + ξX e e são dadas
por 1ε = Δ e 2ε = − Δ e as direções principais correspondentes são dadas por
1 111
12
atan⎛ ⎞ε − ε
α = ⎜ ⎟ε⎝ ⎠, 2 1
πα = α −
2. (35)
Observe da Eq. (34.b) e do exposto no parágrafo anterior que ( )2 1 11 12 1tan tanβ ε − ε ε = α e que,
portanto, a reta tangente à curva ( )22 1ξ ξ é paralela à direção principal correspondente a 1ε .
Similarmente, ( )1 1 11 12 2tan tanβ − ε + ε ε = α e a reta tangente à curva ( )21 1ξ ξ é paralela à direção
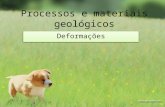
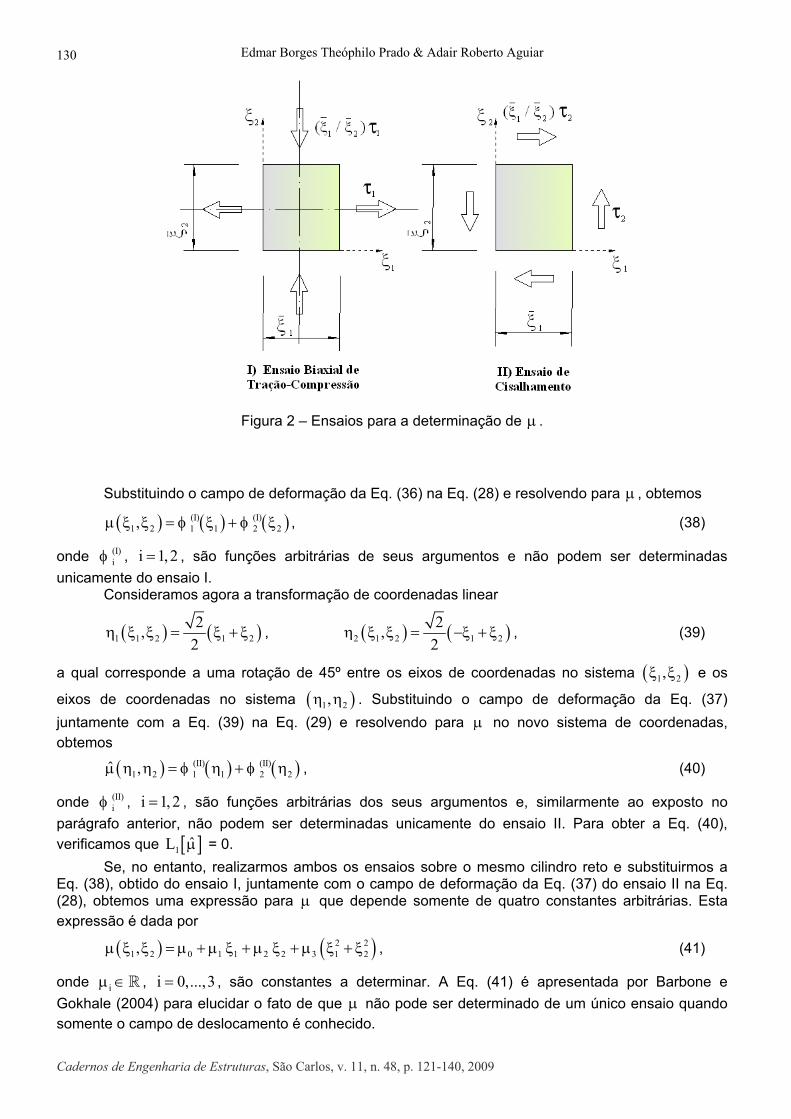
principal correspondente a 2ε . Consideramos agora dois ensaios possíveis de serem realizados em laboratório. Desejamos elucidar o fato de que μ não pode ser determinado de um único ensaio quando gΓ = ∅ na Eq. (14), ou seja, quando somente o campo de deslocamento é conhecido em cada ensaio. Para isto, considere um cilindro reto de secção transversal retangular sob EPD perpendicular ao eixo do cilindro. O material do cilindro é elástico-linear, isotrópico e incompressível. Submetemos o cilindro aos ensaios biaxial de tração-compressão e de cisalhamento, os quais estão ilustrados na Figura 2. Observe desta figura que
iξ , i 1, 2= , são os comprimentos dos lados do cilindro, 1τ e 2τ são os módulos das forças resultantes que atuam sobre os lados verticais do cilindro nos ensaios biaxial (ensaio I) e de cisalhamento (ensaio II), respectivamente.
Supomos que os campos de deformação obtidos de ambos os ensaios são homogêneos e dados por
( ) ( )(I) (I)11 1 2 22 1 2 1, ,ε ξ ξ = −ε ξ ξ = ε , ( )(I)
12 1 2, 0ε ξ ξ = , (ensaio I), (36)
( ) ( )(II) (II)11 1 2 22 1 2, , 0ε ξ ξ = ε ξ ξ = , ( )(II)
12 1 2 2,ε ξ ξ = ε , (ensaio II). (37)
Claramente, os campos de deformação da Eq. (36) e Eq. (37) satisfazem a restrição da Eq. (9) identicamente e referem-se ao mesmo estado de cisalhamento simples se 1 2ε = ε . Neste caso, as direções principais associadas a estes campos de deformação estão relacionadas entre si por uma rotação de eixos de 45º graus. Além disso, inferimos que 0π = , pois lembramos do exposto na Seção 2.1 que π representa a reação do corpo a mudanças de volume. Este conhecimento a priori de π não é utilizado na exposição abaixo, pois desejamos mostrar que, conhecendo-se somente o campo de deformação, μ não pode ser determinado de um único ensaio.
Edmar Borges Theóphilo Prado & Adair Roberto Aguiar
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
130
Figura 2 – Ensaios para a determinação de μ .
Substituindo o campo de deformação da Eq. (36) na Eq. (28) e resolvendo para μ , obtemos
( ) ( ) ( )(I) (I)1 2 1 1 2 2,μ ξ ξ = φ ξ + φ ξ , (38)
onde (I)iφ , i 1, 2= , são funções arbitrárias de seus argumentos e não podem ser determinadas
unicamente do ensaio I. Consideramos agora a transformação de coordenadas linear
( ) ( )1 1 2 1 22,
2η ξ ξ = ξ + ξ , ( ) ( )2 1 2 1 2
2,2
η ξ ξ = −ξ + ξ , (39)
a qual corresponde a uma rotação de 45º entre os eixos de coordenadas no sistema ( )1 2,ξ ξ e os
eixos de coordenadas no sistema ( )1 2,η η . Substituindo o campo de deformação da Eq. (37) juntamente com a Eq. (39) na Eq. (29) e resolvendo para μ no novo sistema de coordenadas, obtemos
( ) ( ) ( )(II) (II)1 2 1 1 2 2ˆ ,μ η η = φ η + φ η , (40)
onde (II)iφ , i 1, 2= , são funções arbitrárias dos seus argumentos e, similarmente ao exposto no
parágrafo anterior, não podem ser determinadas unicamente do ensaio II. Para obter a Eq. (40), verificamos que [ ]1 ˆL μ = 0. Se, no entanto, realizarmos ambos os ensaios sobre o mesmo cilindro reto e substituirmos a Eq. (38), obtido do ensaio I, juntamente com o campo de deformação da Eq. (37) do ensaio II na Eq. (28), obtemos uma expressão para μ que depende somente de quatro constantes arbitrárias. Esta expressão é dada por
( ) ( )2 21 2 0 1 1 2 2 3 1 2,μ ξ ξ = μ + μ ξ + μ ξ + μ ξ + ξ , (41)
onde iμ ∈ , i 0,...,3= , são constantes a determinar. A Eq. (41) é apresentada por Barbone e Gokhale (2004) para elucidar o fato de que μ não pode ser determinado de um único ensaio quando somente o campo de deslocamento é conhecido.

Um procedimento numérico para a determinação de parâmetros elásticos
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
131
Substituindo a Eq. (41) na Eq. (10) e resolvendo para os campos de pressão 1π e 2π dos ensaios I e II, respectivamente, obtemos
( ) ( )1 2 2 11 2 1 1 1 2 2 3 1 2 ˆ, 2 ⎡ ⎤π ξ ξ = ε μ ξ − μ ξ + μ ξ − ξ + π⎣ ⎦ , (42)
( )2 21 2 2 2 1 1 2 3 1 2 ˆ, 2 ⎡ ⎤π ξ ξ = ε μ ξ + μ ξ + 2 μ ξ ξ + π⎣ ⎦ , (43)
onde iπ̂ ∈ , i 1, 2= , são constantes a determinar. Admitimos agora que as forças resultantes iτ , i 1, 2= , (veja a Figura 2) são conhecidas de, por exemplo, medições experimentais. Integrando a Eq. (6) sobre partes complementares de ∂B e utilizando a Eq. (12), obtemos o sistema de equações abaixo.
Ensaio I: O campo de deformação para este ensaio é dado da Eq. (36). Assim,
( )( ) ( )( )2 2ξ ξ
1 1 2 2 1 1 2 20 0
0, d , dτ = −π + 2 μ ε ξ ξ = −π + 2 μ ε ξ ξ ξ∫ ∫ , (44)
( )( ) ( )( )1 1ξ ξ
11 1 1 1 1 1 1 2 1 1
2 0 0
,0 d dξτ = −π − 2 μ ε ξ ξ = −π − 2 μ ε ξ , ξ ξ
ξ ∫ ∫ . (45)
Ensaio II: O campo de deformação para este ensaio é dado da Eq.(37). Assim,
( ) ( )2 2ξ ξ
2 2 2 2 2 1 2 20 0
0, d , dτ = 2 ε μ ξ ξ = 2 ε μ ξ ξ ξ∫ ∫ , (46)
( ) ( )2 2ξ ξ
2 2 1 2 20 0
0 0, d , d= π ξ ξ = π ξ ξ ξ∫ ∫ , (47)
( ) ( )1 1ξ ξ
12 2 1 1 2 2 1 1
2 0 0
,0 d dξτ = 2 ε μ ξ ξ = 2 ε μ ξ , ξ ξ
ξ ∫ ∫ , (48)
( ) ( )1 1ξ ξ
1 1 1 2 10 0
0 ,0 d d= π ξ ξ = π ξ , ξ ξ∫ ∫ . (49)
Substituindo as Eq. (41) – Eq. (43) nas Eq. (44) – Eq. (49), obtemos um sistema de equações sobre-determinado para a determinação dos coeficientes iμ , i 0,....,3= , e iπ̂ , i 1, 2= . A solução deste sistema é dada por
2 10
2 2 1 2
τ τ2 μ = =
ε ξ ε ξ, 1 2 3 0μ = μ = μ = , 1 2ˆ ˆ 0π = π = . (50)
Segue das Eq. (41) – Eq. (43) que μ é constante (portanto, o cilindro é homogêneo) e que i 0π = , i 1, 2= , o que está consistente com o nosso conhecimento a priori dos campos de pressão para estes ensaios. O procedimento utilizado para a determinação de μ a partir dos campos de deformação conhecidos, Eq. (36) e Eq. (37), e das forças resultantes sobre partes complementares dos lados do cilindro pode ser generalizado para o caso geral em que o cilindro não é homogêneo. Neste caso, a solução da equação de equilíbrio Eq. (13) para os campos μ e iπ , i 1, 2= , não é trivial e exige a utilização de métodos numéricos que possibilitem construir aproximações para estes campos. Na próxima seção apresentamos uma formulação fraca do problema de determinação de μ e iπ , i 1, 2= , que, juntamente com o Método dos Elementos Finitos (MEF), possibilita a construção destas aproximações.
Edmar Borges Theóphilo Prado & Adair Roberto Aguiar
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
132
2.3.2 A formulação fraca do problema inverso
Lembramos da Seção 2.1 que o problema inverso consiste em determinar :μ →B e o campo de pressão :π →B que satisfaçam a equação de equilíbrio Eq. (13), onde E satisfaz a restrição cinemática da Eq. (9) e está relacionado ao campo de deslocamento u por meio da Eq. (8). Admitimos que ∈u A é conhecido e que gΓ = ∅ na Eq. (14).
Consideramos, no entanto, que forças resultantes são conhecidas em r partes complementares de ∂B , de modo que
( )i
i i + 2 μ d L∂
= −π∫R 1 E nB
, i 1, 2,..., r= , (51)
onde r
ii=1
∂ ≡ ∂∪B B , i j∂ ∂ ≠ ∅∩B B para i j≠ , e in é a normal exterior a i∂ B . Obviamente, r
ii=1
0=∑R .
A formulação fraca do problema inverso consiste em achar ( )μ ∈ 2L B e ( )π∈ 2L B que satisfaçam
s s str dA 2 dA 0− π ∇ + μ ∇ ⋅∇ =∫ ∫v u v B B
, ∀ ∈v V , (52)
juntamente com as expressões da Eq. (51). Segue da discussão realizada na Seção 2.3.1 que a solução deste problema não pode ser determinada de um único campo de deslocamento. Ainda segundo esta discussão, supomos que conhecemos dois campos de deslocamento, 1 ∈u A e 2 ∈u A , linearmente independentes. Consideramos então o problema da determinação de ( )μ ∈ 2L B e
( )iπ ∈ 2L B , i 1, 2= , que satisfaçam a Eq. (51) e Eq. (52) para os campos de deslocamento iu ,
i 1, 2= , respectivamente.
2.4 Formulações dos problemas discretos
Queremos obter aproximações para as soluções ε ∈u A do problema direto dado pela Eq. (26)
e Eq. (27) e para as soluções ( )μ ∈ 2L B e ( )iπ ∈ 2L B , i 1, 2= , do problema inverso formulado na
seção anterior. Para isto, construímos um domínio de discretização hB composto de m sub-regiões 2
k∈K , k = 1, 2, ..., m , não vazias, de modo que m
h kk=1
≡∪B K , (53)
onde 1 2k k∩K K , 1 2k k≠ , é vazio, um ponto, ou, uma reta. O sub-índice “h” na Eq. (53) refere-se a um
comprimento característico do conjunto { }kK , o qual pode ser tomado como o raio do círculo
circunscrito à sub-região kK de maior área. Desejamos construir um domínio de discretização hB que
aproxime B à medida que h 0→ ; ou seja, para algum ∈∂X B , desejamos que h 0lim - 0
→=X Y para
h ∈∂Y B , onde i é a norma Euclidiana usual em 2 .
Admitimos que a sub-região kK , k 1, 2, ..., m= , contém um conjunto de n̂ pontos, ou, nós
{ }ˆk k 1 k 2 k nˆ ˆ ˆ ˆ, , ..., ≡ X X XN . Sobre cada sub-região kK introduzimos um conjunto de funções de base
normalizadas { }k i kˆ ˆ, i = 1, 2, ..., nϕ →: K tal que
( )k i k j i jˆϕ̂ = δX , ˆi, j = 1, 2, ..., n , (54)

Um procedimento numérico para a determinação de parâmetros elásticos
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
133
onde k iX̂ é o i-ésimo nó de kK . Estas funções de base permitem definir um conjunto de funções contínuas sobre kK , dado por
( ) ( ) ( )n̂
n̂ˆk k j j 1 2 n
j = 1
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ| , , ,...,⎧ ⎫
= ϕ → ϕ α ϕ ∀ α α α ∈⎨ ⎬⎩ ⎭
∑: X = XP K . (55)
Para uma dada função ( ) k̂ϕ̂ ∈X P , está claro da Eq. (55) que ( )i iˆ ˆα = ϕ X são escalares que formam o
conjunto de graus de liberdade ( ){ }k kiˆ ˆ ˆ, i = 1, 2, ..., nΣ = ϕ X . À ordenação ( )k k k
ˆ ˆ, , ΣK P chamamos
elemento finito Lagrangeano e ao conjunto de elementos finitos definidos sobre hB chamamos malha de elementos finitos. O conjunto { }k i
ˆ ˆ, k 1,2,...,m,i 1,2,..., n= =X possui n nós distintos que definem o conjunto
{ }1 2 n h, , ..., ≡ ∈X X XN B , de modo que, para { }j 1, 2,..., n∈ , existem { }k 1, 2,..., m∈ e { }ˆi 1, 2,..., n∈
tal que j k iˆ=X X . Definimos agora o conjunto de funções { }j h , j = 1, 2, ..., nϕ →: B tal que
( ) ( )j k iˆϕ = ϕX X para k h∈ ∩X K B , j = 1, 2, ..., n , ˆi = 1, 2, ..., n . Além disso, admitimos continuidade de
jϕ através da borda comum a dois elementos adjacentes. Assim, jϕ é uma função contínua em hB
que satisfaz ( )j i ijϕ = δX . De fato, o conjunto destas funções é uma base de dimensão finita sobre hB que permite introduzir o conjunto de funções contínuas definido por
( ) ( ) ( )n
nh j j 1 2 n
j = 1| , , ,...,
⎧ ⎫= ϕ → ϕ α ϕ ∀ α α α ∈⎨ ⎬
⎩ ⎭∑: X = XP B . (56)
Utilizando a Eq. (56), introduzimos o espaço finito-dimensional hV como segue
( )( ) ( )( ){ }2 2h h h hu: , sobre = ∈ ∈ Γv v v = 00V C B P B , (57)
onde ( )h0C B é o conjunto de funções contínuas definidas sobre hB e seu contorno h hg hu∂ ≡ Γ ∪ ΓB ,
o o
hg huΓ ∩ Γ = ∅ . Aqui, hgΓ e huΓ são partes complementares de h∂B sobre as quais atuam
aproximações de g , hg , e de u , hu , respectivamente. Observe da Eq. (57) e da definição de V na Seção 2.2 que h ⊂V V se h ⊂B B .
Observe da Eq. (56) e Eq. (57) que uma função h h∈v V é representada por
( ) ( )2 n
h i ii = 1
= ϑ∑v X w X , h h∈ ∪∂X B B , (58)
onde iϑ ∈ e 2i ∈w é dado por
( )2 i - 1 i , 0= ϕw , ( )2 i i0,= ϕw , i = 1, 2, ..., n , (59)
com iϕ sendo a função de base associada ao i-ésimo nó iX . Observe da Eq. (58) e Eq. (59) que
( ) ( )h i 2 i-1 2 i= ϑ ϑv X , para i = 1, 2, ..., n . Chamamos iϑ grau de liberdade do campo hv . Assim,
considerando que cada nó em N tem dois graus de liberdade e que h h∈v V , decompomos o conjunto
completo de 2 n graus de liberdade em dois conjuntos complementares de inteiros, *Z e Z , tais que
i 0ϑ = , * i∀ ∈Z , e { } *1, 2, ..., n ≡ \Z Z .
De maneira similar ao realizado com o conjunto hV , introduzimos o conjunto hA definido por
Edmar Borges Theóphilo Prado & Adair Roberto Aguiar
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
134
( )( ) ( )( ){ }2 2 h h h h hu: , sobre = ∈ ∈ Γv v v = u0A C B P B . (60)
Observe da Eq. (56) e Eq. (60) que um deslocamento h h∈u A é representado por
( ) ( )2 n
h i ii = 1
= υ∑u X w X , h h∈ ∪∂X B B , (61)
onde, para cada índice *i ∈Z , o valor correspondente de iυ é prescrito e dado por i iυ = υ . Definimos também o conjunto
{ } h h h h h: é contínuo por partes sobre = μ → μ : L B B . (62)
Um elemento h hμ ∈L é representado por
( ) ( )m
h k kk = 1
μ = μ τ∑X X , h h∈ ∪∂X B B , (63)
onde lembramos da exposição acima que m é o número de elementos finitos na malha, kμ ∈ e kτ é uma função de base escalar constante por partes, a qual assume valor unitário sobre o elemento kK e é nula sobre h k\B K . Neste trabalho, h = B B e kK , k 1, 2, ..., m= , são quadriláteros cujos nós estão localizados nos vértices destes quadriláteros. O problema direto discreto associado ao espaço hV e obtido da formulação de penalidades na Eq. (26) e Eq. (27) consiste em achar o deslocamento h h∈u A tal que
( ) ( ) ( )h h h h h ha , d , ,+ =u v u v g v , h h∀ ∈v V , (64)
onde ( )a ,i i é dado pela Eq. (22.a) e ( )d ,i i é dado pela Eq. (27). Lembramos da Seção 2.1 que no problema direto os parâmetros elásticos μ na Eq. (22.a) e ε na Eq. (27) são conhecidos.
Uma vez que hu é dado pela Eq. (61) e hv é dado pela Eq. (58), onde os coeficientes iϑ , i = 1, 2, ..., n , são arbitrários, podemos reescrever a Eq. (64) na forma
( )n
ij ij j ij=1
ˆκ + κ υ = γ∑ , i ∈Z , (65)
onde
ij s i s j2 dAκ μ ∇ ⋅∇∫ w w B
, ( )( )ij s i s j2ˆ tr tr dAε
κ ∇ ∇∫ w w B
(66)
( )i h i, γ g w . (67)
Admitimos que as funções de base normalizadas na Eq. (54) são bilineares, ou seja, estas funções são polinômios de primeiro grau em cada uma das coordenadas. Resolvemos o problema direto discreto com o pacote de elementos finitos ANSYS 5.53. Este pacote permite gerar malhas de elementos finitos sobre geometrias complexas e possui uma biblioteca ampla de elementos finitos. Em particular, utilizamos o elemento finito PLANE42 devido à simplicidade de sua formulação. Utilizamos a formulação discreta apresentada acima para simular numericamente os ensaios que fornecem os dois campos de deslocamento 1u e 2u necessários para a determinação de μ , conforme descrito no final da Seção 2.3.2. Estas simulações fornecem também as forças resultantes
1iR e 2
iR da forma apresentada na Eq. (51) sobre partes complementares j∂ B de r
jj=1
∂ ≡ ∂∪B B .
3 ANSYS 5.5 é um software registrado de propriedade da empresa Ansys Inc., PA, USA..
Um procedimento numérico para a determinação de parâmetros elásticos
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
135
O problema inverso discreto associado aos espaços hL e hV e obtido da formulação fraca na
Eq. (52) consiste em achar h hμ ∈L e ih hπ ∈L , i 1, 2= , que satisfaçam
i ih s h h s s htr dA 2 dA 0− π ∇ + μ ∇ ⋅∇ =∫ ∫v u v
B B
, h h∀ ∈v V , (68)
( )j
i i ij h h s j + 2 μ d L
∂
= −π ∇∫R 1 u nB
. (69)
Uma vez que h = B B neste trabalho, assumimos que cada parte j∂ B é dada pela união de
bordas dos elementos próximos ao contorno de hB , ou seja, j
j pp
= ∈
∂ ∪Z
B D , onde pD é a borda do
elemento pK contida em j∂ B e jZ é o conjunto de números inteiros que identificam os elementos com
bordas contidas em j∂ B . Utilizando a Eq. (63), podemos escrever m
h k kk = 1
μ = μ τ∑ e m
i ih k k
k = 1π = π τ∑ ,
i 1, 2= , onde kμ ∈ e ikπ ∈ , k 1, 2, ..., m= , são coeficientes a determinar. Uma vez que iu , i 1, 2= ,
são da forma apresentada na Eq. (61) e hv é dado pela Eq. (58), onde os coeficientes iϑ , i = 1, 2, ..., n , são arbitrários, podemos reescrever a Eq. (68) e a Eq. (69) na forma
2 mi ipq q
q=1
0 α ω =∑ , p ∈Z , (70)
j
i i iq q j
q Z∈
β ω =∑ R , j 1, 2,..., r= , (71)
respectivamente, onde i 1, 2= , e
q
i ip (2q-1) s s p2 dAα ∇ ⋅∇∫ u w
K
, q
ip (2q) s ptr dAα − ∇∫ w
K
, (72)
( )q
i i2q-1 s q2 dAβ ∇∫ u n
D
, q
i2q q dAβ − ∫ n
D
, (73)
i2q-1 qω μ , i i
2q qω π . (74)
Em geral, o sistema linear formado pelas expressões da Eq. (70) a Eq. (74) é sobre-determinado. Para resolver este sistema é necessário utilizar técnicas especiais de inversão. Aqui, utilizamos um algoritmo de pseudo-inversão, ou, inversão generalizada via decomposição SVD (Singular Value Decomposition; veja Golub e Loan (1996)). Este algoritmo foi implementado utilizando rotinas do IMSL 10.14 para FORTRAN 10.15. Os principais dados de entrada destas rotinas são os coeficientes i
jR , a matriz W formada pelos coeficientes que multiplicam iqω no sistema da Eq. (70) e
da Eq. (71), as dimensões de W e uma tolerância que fornece a maior matriz quadrada não singular de W . Neste trabalho, a tolerância é um número não-negativo abaixo do qual um valor singular de W é considerado nulo. Os valores singulares de W são a raízes quadradas dos autovalores do produto da transposta de W pelo próprio W e são ordenados em ordem decrescente. O número de valores singulares não-nulos é igual ao posto de W . Um estudo preliminar da influência da tolerância sobre os valores de μ permitiu concluir que, para tolerâncias menores do que 10-8, todos os valores obtidos para μ eram fisicamente plausíveis e diferiam pouco entre si.
4 IMSL 10.1 é um software registrado da empresa Intel Corporation. IMSL é marca registrada de propriedade da empresa Visual Numerics, Inc. 5 FORTRAN 10.1 é um software registrado da empresa Intel Corporation.
Edmar Borges Theóphilo Prado & Adair Roberto Aguiar
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
136
3 RESULTADOS NUMÉRICOS
Utilizamos as formulações discretas da Seção 2.4 para, primeiramente, simular numericamente dois ensaios sobre um cilindro reto de secção quadrada cujo comprimento do lado é ξ = 50 mm. O cilindro está sob E.P.D. perpendicular ao seu eixo de simetria e contém uma inclusão cilíndrica reta de secção circular cujo raio é r = 6 mm, conforme ilustrado na Figura 3. Ambos os cilindros possuem o mesmo eixo de simetria, são homogêneos e quase-incompressíveis, com constantes elásticas dadas por
C 0.499999ν = , C 36000μ = Pa, (75)
Ι Cν = ν , Ι C6μ = μ , (76)
onde ν e μ são, respectivamente, os coeficientes de Poisson e o módulo de elasticidade ao cisalhamento e os sub-índices I e C denotam, respectivamente, a inclusão e o cilindro de secção quadrada sem a inclusão. Segue da discussão sobre o método das penalidades na Seção 2.2 que os parâmetros de penalidade para a inclusão e o seu entorno são dados por -11
Ιε ≅ 1,85∗10 Pa-1 e -10
Cε ≅ 1,11∗10 Pa -1, respectivamente. Consideramos os ensaios bi-axial de tração-compressão e de cisalhamento, conforme ilustrado na Figura 3. As condições de contorno sobre os lados do cilindro com a inclusão para estes ensaios são dadas abaixo.
i) Ensaio biaxial de tração-compressão: a) Bordas Verticais:
( )1 2u 0, 0ξ = , ( )1 1 2 1 1u ,ξ ξ = ε ξ , (77)
( )( ) ( )( )2 1 2 2 1 1 20, = , 0⋅ ξ ⋅ ξ ξ =e T e e T e . (78)
b) Bordas Horizontais:
( )2 1u ,0 0ξ = , ( )1 1 2 1 2u ,ξ ξ = −ε ξ , (79)
( )( ) ( )( )1 2 1 1 2 1 2,0 = , 0⋅ ξ ⋅ ξ ξ =e T e e T e . (80)
ii) Ensaio de cisalhamento: a) Bordas Verticais:
( ) ( )1 2 1 1 2 2 2u 0, u , 2ξ = ξ ξ = ε ξ , ( ) ( )2 2 2 1 2u 0, u , 0ξ = ξ ξ = . (81)
b) Bordas Horizontais:
( ) ( )1 1 1 1 2 2 2u ,0 u , 2ξ = ξ ξ = ε ξ , ( ) ( )2 1 2 1 2u ,0 u , 0ξ = ξ ξ = . (82)
Conforme explicado na Seção 2.4, realizamos as simulações numéricas para os problemas diretos correspondentes aos ensaios acima utilizando o pacote de elementos finitos ANSYS 5.5. Obtivemos os campos de deslocamento e as forças resultantes sobre os lados do cilindro para cada ensaio, os quais foram utilizados como dados de entrada para a simulação numérica do problema inverso relacionado à determinação de μ .

Um procedimento numérico para a determinação de parâmetros elásticos
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
137
Figura 3 – Ensaios para a determinação de μ em um cilindro com inclusão.
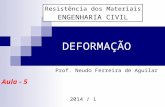
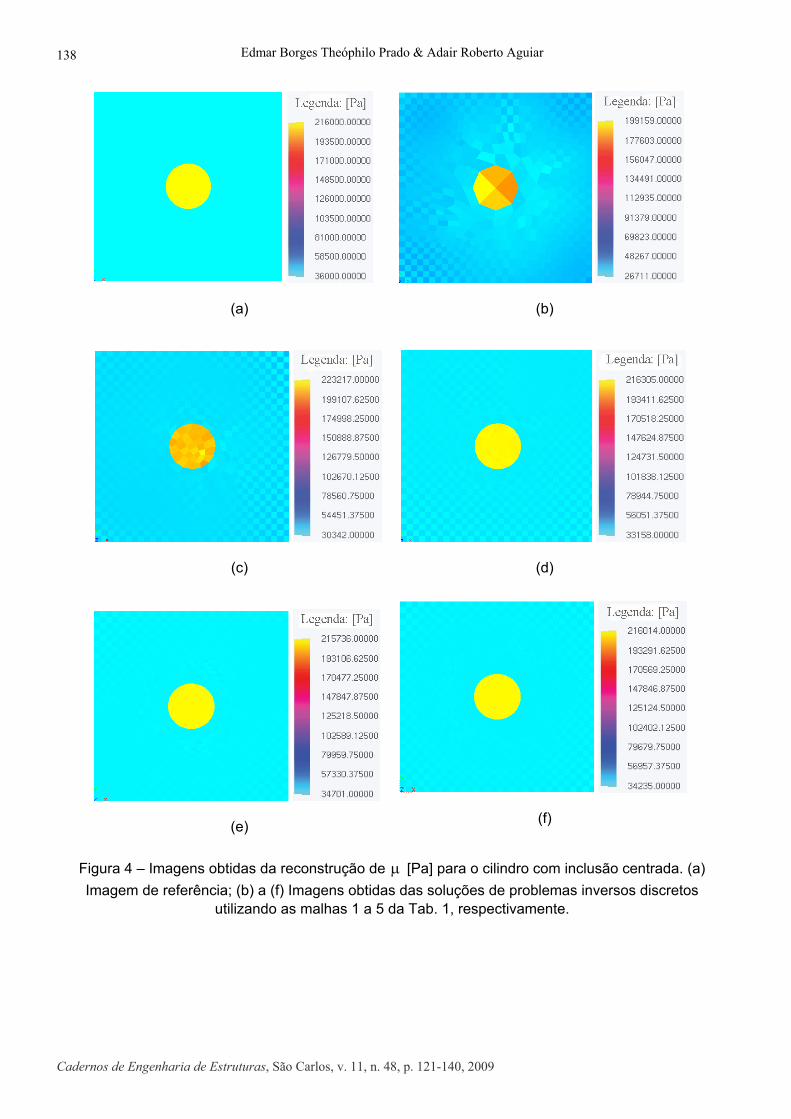
Observe do exposto na Seção 2.3.1 juntamente com as expressões da Eq. (77) a Eq. (82) que se o cilindro fosse homogêneo (ou seja, se as constantes elásticas da inclusão fossem iguais às constantes elásticas do seu entorno), então as soluções dos problemas diretos relacionados aos ensaios i) e ii) acima forneceriam as deformações homogêneas da Eq. (36) e da Eq. (37), respectivamente. Neste caso, as componentes normais de tensão sobre os lados do cilindro no ensaio ii) seriam nulas. Considerando agora as constantes dadas pela Eq. (76) e lembrando que os comprimentos dos lados da secção quadrada são muito maiores do que o raio da inclusão, esperamos que as componentes normais de tensão sobre as bordas externas do cilindro para o ensaio ii) sejam muito pequenas. Na formulação do problema direto discreto da Eq. (64), as condições de carregamento da Eq.(78) e da Eq. (80) são impostas fracamente, ou seja, esperamos obter as condições da Eq. (78) e da Eq. (80) no limite, quando h 0→ . Portanto, para um dado h 0> , estas condições não se verificam e existem resíduos de forças resultantes correspondentes às tensões cisalhantes na Eq. (78) e na Eq. (80). Estas forças residuais não estão mostradas na Figura 3, mas são levadas em consideração na resolução do problema inverso discreto para simular possíveis erros de medição no aparato experimental. Apresentamos na Figura 4 resultados relacionados com a reconstrução do módulo de elasticidade ao cisalhamento μ para o cilindro com a inclusão centrada a partir dos campos de deslocamento e das forças resultantes obtidas das simulações dos ensaios i) e ii) descritos acima. Para isto, implementamos um programa computacional baseado na formulação do problema inverso discreto dado pela Eq. (68) e Eq. (69). A Figura 4 apresenta seis imagens coloridas juntamente com os mapas de cores correspondentes. A imagem (a) no lado superior esquerdo apresenta somente duas cores que estão relacionadas aos valores de μ na Eq. (75) e Eq. (76). Esta imagem é tomada como referência. As demais imagens, (b) a (f), correspondem às malhas 1 a 5 da Tabela 1, respectivamente. Assim, a imagem (b) corresponde à malha 1, a qual contém 803 nós e 738 elementos, e a imagem (f) corresponde à malha 5, a qual contém 1544 nós e 1479 elementos. Comparando estas imagens à imagem de referência (a), observamos primeiramente que as soluções de todos os problemas discretos correspondentes às malhas da Tabela 1 fornecem reconstruções de μ que permitem identificar a inclusão de seu entorno. Observamos também que a reconstrução de μ é tanto melhor quanto mais refinada a malha.
Edmar Borges Theóphilo Prado & Adair Roberto Aguiar
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
138
(a)
(b)
(c)
(d)
(e)
(f)
Figura 4 – Imagens obtidas da reconstrução de μ [Pa] para o cilindro com inclusão centrada. (a) Imagem de referência; (b) a (f) Imagens obtidas das soluções de problemas inversos discretos
utilizando as malhas 1 a 5 da Tab. 1, respectivamente.

Um procedimento numérico para a determinação de parâmetros elásticos
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
139
Tabela 1– Malhas de elementos finitos para o cilindro com inclusão centrada
Malha Número de nós Número de elementos
1 803 738
2 1016 951
3 1148 1083
4 1380 1315
5 1544 1479
4 CONCLUSÕES
Apresentamos um procedimento numérico para a determinação do módulo de elasticidade ao cisalhamento μ de um sólido elástico-linear, isotrópico e incompressível sob estado plano de deformação. Uma vez que os tecidos biológicos moles são considerados quase-incompressíveis e têm sido modelados sob leis lineares quando se aplica uma deformação inferior a 2,5 %, o procedimento desenvolvido neste trabalho é uma ferramenta com grande potencial de aplicação no diagnóstico de tumores imersos em tecido sadio e na identificação de diferentes tecidos compondo um mesmo órgão a partir do conhecimento de campos de deslocamento internos do corpo e de resultantes de forças aplicadas em partes complementares do contorno do corpo.
5 AGRADECIMENTOS
Agradecemos à CAPES pelo apoio financeiro, sem o qual esta pesquisa não teria sido possível.
6 REFERÊNCIAS
BARBONE, P. E.; BAMBER, J. C. Quantitative elasticity imaging: what can and cannot be inferred from strain images. Physics in Medicine and Biology, v. 47, n. 12, p. 2147-2164, 2002. ISSN: 0031-9155.
BARBONE, P. E.; GOKHALE, N. H. Elastic modulus imaging: on the uniqueness and nonuniqueness of the eslastography inverse problem in two dimension. Inverse Problems, v. 20, p. 283-296, 2004. ISSN: 0266-5611.
FUNG, Y.C. Biomechanics: mechanical properties of living tissues. 2. ed. New York, USA: Springer, 2004. 568 p. ISBN: 0-387-97947-6.
GOLUB, G. H.; LOAN, C. F. V. Matrix computation. 3. ed. Baltimore, USA: The Johns Hopkins University Press, 1996. 694 p. ISBN: 0-8018-5414-8.
GURTIN, E. M. An introduction to continuum mechanics. New York, USA: Academic Press, 1981. 265 p. ISBN: 0-12-309750-9.
Edmar Borges Theóphilo Prado & Adair Roberto Aguiar
Cadernos de Engenharia de Estruturas, São Carlos, v. 11, n. 48, p. 121-140, 2009
140
KROUSKOP, T. et al. Elastic moduli of breast and prostate tissues under compression. Ultrason. Imaging, v. 20, n. 4, p. 260-274, 1998. ISSN: 0161-7346.
LIU, H. T. et al. Analytic modeling of breast elastography. Medical Physics, v. 30, n. 9, p. 2340-2349, 2003. ISSN: 0094-2405.
MRIDHA, M.; ÖDMAN, S. Noninvasive method for the assessment of subcutaneous edema. Medical and Biological Engineering and Computing, v. 24, n. 4, p. 393-398, 1986. ISSN: 0140-0118.
OPHIR, J. et al. Elastography: a quantitative method for imaging the elasticity of biological tissues. Ultrason Imaging, v. 13, n. 2, p. 111-134, Apr., 1991. ISSN: 0161-7346.
OPHIR, J. et al. Optical and acoustical imaging of biological media: elastography. Comptes Rendus de l’Académie des Sciences, t. 2, Série IV, p. 1193-1212, 2001. ISSN: 1296-2147.
OPHIR, J. et al. Elastography: imaging the elastic properties of soft tissues with ultrasound. Journal of Medical Ultrasonics, v. 29, n. 4, p. 155-171, 2002. ISSN: 1346-4523.
PRADO, E. B. T. Estudo numérico sobre a determinação de parâmetros em um sólido elástico-linear e incompressível. 2008. Dissertação (Mestrado em Engenharia de Estruturas) – Escola de Engenharia de São Carlos, Universidade de São Paulo, São Carlos, 2008.
REEVES, M. J. et al. Determinants of breast cancer detection among Wisconsin (United States) women, 1988-90. Cancer Causes and Control, v. 6, n. 2, p. 103-111, Mar., 1995. ISSN: 0957-5243.
SARVAZYAN, A. Shear acoustic properties of soft biological tissues in medical diagnostics. The Journal of the Acoustical Society of América, ASA, v. 93, n. 4, p. 2329-2330, 1993. ISSN: 0001-4966.
WEINBERGER, H. F. Partial differential equations with complex variables and transform methods. New York, USA: John Wiley & Sons, Inc, 1965. 446 p. ISBN: 0-47-100623-8.