
Sistema electrónico de instrumentação para comando e ... · Faculdade de Engenharia da...
108
Faculdade de Engenharia da Universidade do Porto Departamento de Engenharia Electrotécnica e de Computadores Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão Henrique José Alves Teixeira Dissertação de Mestrado em Engenharia Electrotécnica e de Computadores, ramo de Informática e Automação, apresentada à Faculdade de Engenharia da Universidade do Porto Março 2005
Transcript of Sistema electrónico de instrumentação para comando e ... · Faculdade de Engenharia da...
Faculdade de Engenharia da Universidade do Porto Departamento de Engenharia Electrotécnica e de Computadores
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de
Tensão
Henrique José Alves Teixeira
Dissertação de Mestrado em Engenharia Electrotécnica e de Computadores, ramo de Informática e Automação,
apresentada à Faculdade de Engenharia da Universidade do Porto
Março 2005

Dissertação de Mestrado em Engenharia Electrotécnica e de Computadores, ramo de Informática e Automação
Orientador: Diamantino Rui da Silva Freitas
Doutor em Engenharia Electrotécnica e de Computadores Professor Associado do Departamento de Engenharia Electrotecnia e de Computadores da Faculdade de Engenharia da Universidade do Porto
Co-orientador: Américo Vicente Teixeira Leite
Doutor em Engenharia Electrotécnica e de Computadores Professor Adjunto da Escola Superior de Tecnologia e de Gestão de Bragança do Instituto Politécnico de Bragança
Agradecimentos
Gostaria de deixar aqui manifestado o meu agradecimento a todas as pessoas que me ajudaram, apoiaram e colaboraram durante a realização da presente dissertação.
Ao Professor Diamantino Freitas, em primeiro lugar por ter sido meu orientador e por toda a sua disponibilidade em deslocar-se várias vezes a Bragança para discutirmos ideias e levantar questões.
Ao Professor Américo Leite, meu co-orientador pela sua constante disponibilidade, esforço e ajuda em tudo o que esteve ao seu alcance na medida do possível para criar as condições necessárias para que este trabalho fosse desenvolvido, bem como no levantar das questões essenciais.
Ao Professor Rui Araújo, pelas sujestões e ajuda na resolução de vários problemas que foram surgindo ao longo do desenvolvimento do sistema.
Ao Eng. José Batista, Eng. José Barbosa e Filipe Fernandes, pelo apoio em todos os trabalhos realizados no Laboratório de Electrónica da Escola Superior de Tecnologia e de Gestão de Bragança.
Ao Engenheiro Dave Anderson, “Senior Applications Engineer” da CADDOCK Electronics Inc, pela oferta das resistências de baixo valor óhmico, utilizadas para efectuar a medida de corrente no sistema.
À minha esposa Conceição, por todo o seu carinho e paciência nos momentos mais difíceis.
Aos meus pais.

Resumo Este trabalho apresenta o desenvolvimento de um sistema de instrumentação e
controlo para um motor de indução trifásico, baseado num inversor a MOSFET, incluindo o estudo dos efeitos provocados em termos de Interferência Electromagnética.
O sistema foi desenvolvido com o intuito de ser uma plataforma didáctica e flexível, que, entre outras coisas, sirva de base ao estudo a alunos no âmbito de diversas disciplinas, quer de controlo, quer de monitorização através de PC, utilizando placas de aquisição de dados, permitindo a visualização de determinadas grandezas do sistema, devidamente isoladas do sistema de potência, tornando assim o sistema seguro em termos de risco, para os seus utilizadores e para o equipamento.
Apresenta também uma inovação em termos de desenvolvimento de técnicas de alimentação aos sub-sistemas (“drives“) de controlo dos interruptores electrónicos de potência. O objectivo é ser um protótipo para aplicações e desenvolvimentos futuros de um sistema que poderá ser aplicado no controlo de um motor para tracção de um veículo eléctrico.
O trabalho foi desenvolvido tendo em consideração as regras da compatibilidade electromagnética (EMC), em particular no estudo da Interferência Electromagnética (EMI). Neste âmbito este trabalho permitiu ainda o estudo e análise do ruído eléctrico provocado pelo funcionamento dos semicondutores que constituem o inversor, com especial atenção para a corrente de ruído de modo comum, a qual aparece devido à existência de capacidades parasitas inerentes ao sistema e aos valores importantes de dv/dt provocados na tensão de saída do inversor electrónico, quando da entrada/saída de condução dos MOSFET.
Abstract This work presents the development of a control and instrumentation system
of a three-phase induction motor, based on an inverter with MOSFET and the study of the effects caused in terms of Electromagnetic Interference,.
The system was developed with the intention of being a didactic and flexible platform, that allows between others things, to serve the base of the study for the students in the scope of several disciplines, in control, in monitoring through a PC, using acquisition data board, allowing the visualization of determined systems quantities, duly isolated of the power system, thus making the system safe in terms of risk for its users and other equipment.
It also presents an innovation in terms of development of techniques of supplying power to driver circuits of the electronic switches, with the aim of being a prototype for applications and future developments of a system that is intended to be applied in the control of a traction motor of an electric vehicle.
The work was developed having in consideration the rules of the electromagnetic compatibility (EMC), in particular in the study of Electromagnetic Interference (EMI). In this scope this work still allowed the study and analysis of the noise provoked by the functioning of the semiconductors that integrate the converter, with special attention to the common mode noise current, which appears due to existence of parasitic capacities inherent to the system during the high dv/dt voltage transition in the output side of the inverter, when the MOSFET switch between ON and OFF states.
Résumé Ce travail présente le développement d'un système d'instrumentation et de
contrôle d'un moteur d'induction triphasé, basé sur un inverseur MOSFET, y compris l'étude des effets provoqués dans des termes d'Interférence Électromagnétique.
Le système a été développé avec l'intention d'être une plate-forme didactique et flexible, laquelle, entre autres choses, peut servir de base à l'étude à des élèves dans le contexte de diverses disciplines, soit de contrôle, soit de surveillance par PC, utilisant cartes d'acquisition de données, permettant la visualisation de certaines grandeurs, dûment isolées du système de puissance, rendant ainsi le système sûr dans des termes de risque, pour leurs utilisateurs et autre équipement.
Il présente aussi une innovation dans les termes de développement de techniques d'alimentation aux sous-systèmes ("drives") de contrôle des commutateurs électroniques de puissance, avec l'objectif d'être un prototype pour les applications et des développements futurs d'un système qui pourra être appliqué dans le contrôle d'un moteur pour traction d'un véhicule électrique.
Le travail a été développé avec les règles de la compatibilité électromagnétique (EMC), en particulier dans l'étude d’Interférence Électromagnétique (EMI). Dans ce contexte ce travail a permis encore l'étude et l'analyse du bruit électrique provoqué par le fonctionnement des semiconducteurs qui constituent l'inverseur, avec spéciale attention pour la chaîne de bruit de mode conduit, qui apparaît dû à l'existence de capacités parasitiques inhérentes au système et aux valeurs importantes de dv/dt provoquées dans la tension de sortie de l'inverseur électronique, quand de l'entrée/sortie de conduction des MOSFET.
i
Índice
1. INTRODUÇÃO............................................................................................................................ 2 1.1. OBJECTIVOS DO TRABALHO ................................................................................................. 3 1.2. COMPATIBILIDADE ELECTROMAGNÉTICA (EMC) ................................................................ 4 1.3. SEGURANÇA ELÉCTRICA E USO DOS CONDUTORES E SISTEMAS DE PROTECÇÃO ................... 5 1.4. RUÍDO.................................................................................................................................. 5 1.5. INTERFERÊNCIA ELECTROMAGNÉTICA (EMI)...................................................................... 6 1.6. DIRECTIVAS E MARCAÇÃO CE ............................................................................................ 7 1.7. O SEGUIMENTO DESTA DISSERTAÇÃO .................................................................................. 8 1.8. CONCLUSÃO ........................................................................................................................ 9
2. FENÓMENOS ELECTROMAGNÉTICOS............................................................................ 11 2.1. ACOPLAMENTO CAPACITIVO.............................................................................................. 11 2.2. ACOPLAMENTO INDUTIVO ................................................................................................. 13 2.3. TIPOS DE PERTURBAÇÕES .................................................................................................. 16
2.3.1. Fonte de ruído........................................................................................................ 16 2.3.2. Canal de acoplamento............................................................................................ 19 2.3.3. Receptor de ruído .................................................................................................. 22
2.4. FORMAS DE REDUÇÃO DOS FENÓMENOS ELECTROMAGNÉTICOS ........................................ 23 2.4.1. Formas de ligação das blindagens à terra .............................................................. 24 2.4.2. Toros de Ferrite ..................................................................................................... 24 2.4.3. Filtros EMI/RFI ..................................................................................................... 25 2.4.4. Formas de redução de ruído na concepção do PCB............................................... 26 2.4.5. Cuidados a ter na escolha dos circuitos integrados................................................ 26
2.5. CONCLUSÃO ...................................................................................................................... 26 3. CONCEPÇÃO E DESENVOLVIMENTO DO SISTEMA PARA CONDUÇÃO AVANÇADA DO MOTOR DE INDUÇÃO TRIFÁSICO ........................................................... 29
3.1. DESCRIÇÃO DO SISTEMA.................................................................................................... 29 3.2. PROTECÇÕES ..................................................................................................................... 34 3.3. CIRCUITO DE ALIMENTAÇÃO DO DRIVE DOS MOSFET....................................................... 36 3.4. CIRCUITO DE CONTROLO DOS MOSFET............................................................................ 37 3.5. MEDIÇÃO DO TEMPO DE ACTUAÇÃO DO SISTEMA DE PROTECÇÃO CONTRA SOBRE-INTENSIDADES............................................................................................................................ 40
3.5.1. Tempo que demora a anular o sinal de comando de gate ...................................... 42 3.5.2. Tempo que demora até o MOSFET sair de condução ........................................... 44
3.6. CONCLUSÃO ...................................................................................................................... 48 4. RESULTADOS EXPERIMENTAIS........................................................................................ 51
4.1. EFEITOS PROVOCADOS PELO INVERSOR ............................................................................. 51 4.2. MEDIDA DA TENSÃO E CORRENTE NO BARRAMENTO DC................................................... 55 4.3. MEDIDA DE TENSÃO E CORRENTE À SAÍDA DO INVERSOR................................................... 57 4.4. MEDIÇÃO DA TENSÃO DE RUÍDO ........................................................................................ 60 4.5. MEDIÇÃO DA CORRENTE DE RUÍDO ................................................................................... 62 4.6. COLOCAÇÃO DE BLINDAGENS E SEUS EFEITOS ................................................................... 66

ii
4.6.1. Situação de referência............................................................................................ 66 4.6.2. Situação com o motor a rodar a 1500 rpm............................................................. 68 4.6.3. Efeitos do ruído no sistema electrónico de controlo.............................................. 71 4.6.4. Sistema com motor referenciado à terra no transformador.................................... 72 4.6.5. Sistema com blindagem do cabo de saída ligada à terra........................................ 75 4.6.6. Sistema com blindagens ligadas à terra antes e depois do inversor ....................... 77
4.7. PROTÓTIPO DO DRIVE AC .................................................................................................. 79 4.8. CONCLUSÃO ...................................................................................................................... 82
5. CONCLUSÃO ............................................................................................................................ 85
BIBLIOGRAFIA .............................................................................................................................. II
ANEXOS...........................................................................................................................................III
iii
Lista de Figuras
FIGURA 1 - SISTEMA A DESENVOLVER..............................................................................................4 FIGURA 2 - ELEMENTOS NECESSÁRIOS PARA HAVER RUÍDO......................................................6 FIGURA 3 - ACOPLAMENTO CAPACITIVO. ......................................................................................11 FIGURA 4 – DESCRIÇÃO DO ACOPLAMENTO CAPACITIVO.........................................................12 FIGURA 5 - EFEITO DA BLINDAGEM NO ACOPLAMENTO CAPACITIVO...................................13 FIGURA 6 – FENÓMENO DA INDUÇÃO MAGNÉTICA. ....................................................................15 FIGURA 7 - EFEITO DA BLINDAGEM NO ACOPLAMENTO POR INDUÇÃO................................16 FIGURA 8 - CONDENSADOR PARASITA CRIADO PELO DISSIPADOR E PELO
SEMICONDUTOR. .............................................................................................................18 FIGURA 9 - ACOPLAMENTO EM MODO DIFERENCIAL..................................................................20 FIGURA 10 - ACOPLAMENTO EM MODO COMUM. .........................................................................21 FIGURA 11 - ACOPLAMENTO EM MODO ANTENA. ........................................................................21 FIGURA 12 - ACOPLAMENTO POR IMPEDÂNCIA COMUM............................................................22 FIGURA 13 - LIGAÇÃO DE TERRAS A UM ÚNICO PONTO. ............................................................24 FIGURA 14 - LIGAÇÃO À TERRA EM VÁRIOS PONTOS..................................................................24 FIGURA 15 - ESQUEMA ELÉCTRICO EQUIVALENTE DE UMA FERRITE. ...................................25 FIGURA 16 - DIAGRAMA COM OS MÓDULOS DO SISTEMA. ........................................................29 FIGURA 17 - DIAGRAMA DE BLOCOS DO MÓDULO DE PROTECÇÃO. .......................................31 FIGURA 18 - CIRCUITO PARA EFECTUAR A PROTECÇÃO DO SISTEMA CONTRA SOBRE-
INTENSIDADES NO BARRAMENTO DC. ......................................................................32 FIGURA 19 - ESQUEMA SIMPLIFICADO DO HCPL 314J. .................................................................34 FIGURA 20 - ESQUEMA SIMPLIFICADO DO HCPL2611...................................................................35 FIGURA 21 - CIRCUITO TÍPICO HCPL 788J. ......................................................................................35 FIGURA 22 - CIRCUITO DE ALIMENTAÇÃO DO DRIVE A PARTIR DO BARRAMENTO DC......37
FIGURA 23 - CIRCUITO PARA DETECÇÃO DEFEITO, NO BARRAMENTO DC............................38 FIGURA 24 - CIRCUITO PARA DETECÇÃO DE DEFEITO, NUMA FASE........................................39 FIGURA 25 - CIRCUITO PARA SINALIZAÇÃO E MEMORIZAÇÃO DE UM DEFEITO. ................39
FIGURA 26 - CIRCUITO QUE CONTROLA A PASSAGEM DOS SINAIS DE PWM PARA OS MOSFET..............................................................................................................................40
FIGURA 27 - CIRCUITO PARA MEDIÇÃO DO TEMPO DE ACTUAÇÃO DAS PROTECÇÕES. ....41
FIGURA 28 - PROPAGAÇÃO DO SINAL FAULT ATÉ RETIRAR SINAL DE GATE (1 - FAULT; 2 - SINAL DE CONTROLO DA GATE). ............................................................43
FIGURA 29 – SINAIS DA FIGURA 28 COM MAIOR DETALHE TEMPORAL. .................................43 FIGURA 30 - CIRCUITO UTILIZADO PARA MEDIR O TEMPO DE SAÍDA DE CONDUÇÃO
DO MOSFET. ......................................................................................................................45 FIGURA 31 - TEMPO QUE DEMORA O MOSFET A SAIR DE CONDUÇÃO....................................46 FIGURA 32 - CIRCUITO QUE PERMITE MEDIR O TEMPO QUE DEMORA A ANULAR-SE A
CORRENTE NO BARRAMENTO DC...............................................................................47
iv
FIGURA 33 – SINAL DE FAULT VERSUS QUEDA DE TENSÃO AOS TERMINAIS DE R .SENSE ....48
FIGURA 34 - COMPONENTES PRINCIPAIS DO CIRCUITO. .............................................................51 FIGURA 35 - SISTEMA SIMPLIFICADO APRESENTANDO AS COMPONENTES PARASITAS....52
FIGURA 36 - CAMINHOS CRIADOS PARA A CIRCULAÇÃO DA CORRENTE DE RUÍDO CRIADA PELO DV/DT NA TENSÃO. ..............................................................................53
FIGURA 37 - ESQUEMA PARA AQUISIÇÃO DE RUÍDO EXISTENTE NA TERRA DA INSTALAÇÃO. ...................................................................................................................54
FIGURA 38 - IMAGEM DE RUÍDO EXISTENTE NA TERRA DA INSTALAÇÃO. ...........................54 FIGURA 39 – LOCALIZAÇÃO DOS SENSORES PARA EFECTUAR A AQUISIÇÃO DAS
IMAGENS. ..........................................................................................................................55 FIGURA 40 - FORMA DE ONDA DA TENSÃO (1) E DA CORRENTE (2), NO BARRAMENTO
DC........................................................................................................................................56 FIGURA 41 - FORMA DE ONDA DA TENSÃO E DA CORRENTE NO BARRAMENTO DC,
DETALHADA. ....................................................................................................................56 FIGURA 42 - ESQUEMA UTILIZADO PARA A AQUISIÇÃO DA TENSÃO COMPOSTA E
CORRENTE NUMA FASE.................................................................................................57 FIGURA 43 - FORMAS DE ONDA DA TENSÃO COMPOSTA E CORRENTE QUE
ALIMENTAM O MOTOR. .................................................................................................57 FIGURA 44 - FORMA DE ONDA DA TENSÃO COMPOSTA E DA CORRENTE QUE
ALIMENTAM O MOTOR. .................................................................................................58 FIGURA 45 - MEDIÇÃO DE RUÍDO INTRODUZIDO NA TERRA. ....................................................59 FIGURA 46 – TENSÃO SIMPLES E RUÍDO INTRODUZIDO NA TERRA DA INSTALAÇÃO. .......59
FIGURA 47 - ESQUEMA UTILIZADO PARA MEDIR A TENSÃO DE RUÍDO..................................60 FIGURA 48- FORMA DE ONDA DA TENSÃO VNT. .............................................................................61 FIGURA 49 - FORMA DE ONDA DA TENSÃO VNT, COM MAIOR DETALHE.................................61 FIGURA 50 - FORMA DE ONDA DA TENSÃO VNT E DA CORRENTE NUMA FASE DO
MOTOR. ..............................................................................................................................62 FIGURA 51 - ESQUEMA UTILIZADO PARA ADQUIRIR A CORRENTE IFT. ...................................63 FIGURA 52 - FORMA DE ONDA DA CORRENTE DE RUÍDO IFT À SAÍDA DO DRIVE. .................64 FIGURA 53 - FORMA DE ONDA DA TENSÃO VDS E DA CORRENTE IFT, À SAÍDA DO
DRIVE, COM MAIOR DETALHE......................................................................................64 FIGURA 54 - ESQUEMA PARA MEDIÇÃO DE IFT NA LIGAÇÃO DO MOTOR À TERRA. ............65 FIGURA 55 - FORMAS DE ONDA DA TENSÃO VDS E DA CORRENTE IFT......................................65 FIGURA 56 - FORMAS DE ONDA DA TENSÃO VDS E DA CORRENTE IFT, COM MAIOR
DETALHE. ..........................................................................................................................66 FIGURA 57 - SISTEMA COMPLETO COM OS VÁRIOS PONTOS PARA LIGAÇÃO À TERRA. ....67
FIGURA 58 - FORMA DE ONDA DA TENSÃO COMPOSTA À ENTRADA DO AUTO-TRANSFORMADOR (R-T). ...............................................................................................67
FIGURA 59 - FFT DA TENSÃO COMPOSTA À ENTRADA DO AUTO-TRANSFORMADOR.........68
FIGURA 60 - FORMA DE ONDA DA CORRENTE NUMA FASE, À ENTRADA DO AUTO-TRANSFORMADOR. .........................................................................................................69
FIGURA 61 - FORMA DE ONDA DA CORRENTE, NUMA FASE DE ALIMENTAÇÃO DO MOTOR. ..............................................................................................................................69
FIGURA 62 - FFT DA FORMA DE ONDA DA CORRENTE DA FIGURA 62. ....................................70 FIGURA 63 - CORRENTE DE RUÍDO E RESPECTIVA FFT COM O MOTOR A 1500RPM. ............70
v
FIGURA 64 - FORMA DE ONDA DA CORRENTE E FFT NO CONDUTOR TP A 0RPM..................71
FIGURA 65 - RUÍDO EXISTENTE NO SINAL DE FAULT, À SAÍDA DO HCPL 2611......................72
FIGURA 66 - ESQUEMA DE LIGAÇÕES DE ALGUNS PONTOS À TERRA. ....................................72 FIGURA 67 - CORRENTE DE RUÍDO E SUA FFT NO PONTO A.......................................................73 FIGURA 68 - FORMA DE ONDA E FFT DA CORRENTE NO PONTO TP. ........................................74 FIGURA 69 – RUÍDO NO SINAL DE FAULT COM O ESQUEMA DA FIGURA 66...........................74 FIGURA 70 - ESQUEMA MELHORADO COM MAIS ALGUNS PONTOS LIGADOS À TERRA.....75
FIGURA 71 - CORRENTE DE RUÍDO IFT NO PONTO A DA FIGURA 70. .........................................75 FIGURA 72 - CORRENTE IFT NO PONTO TP DA FIGURA 70. ...........................................................76 FIGURA 73 - RUÍDO NO SINAL DE FAULT COM O ESQUEMA DA FIGURA 70. ..........................76 FIGURA 74 - MELHOR ESQUEMA COM TODOS OS PONTOS LIGADOS À TERRA.....................77
FIGURA 75 – CORRENTE IFT NO PONTO A DA FIGURA 74. ............................................................77 FIGURA 76 - CORRENTE IFT NO PONTO D DA FIGURA 74. .............................................................78 FIGURA 77 - CORRENTE IFT NO PONTO TP DA FIGURA 74. ...........................................................78 FIGURA 78 - RUÍDO NO SINAL DE FAULT COM O ESQUEMA DA FIGURA 74. ..........................79 FIGURA 79 - SISTEMA FÍSICO COMPLETO, COM TODOS OS BLOCOS........................................80 FIGURA 80 – PROTÓTIPO DO DRIVE AC DETALHADO. ..................................................................81 FIGURA 81 - FORMAS DE ONDA DA TENSÃO COMPOSTA E DA CORRENTE I QUE
CIRCULA NA BAINHA DO CABO QUE LIGA O INVERSOR AO MOTOR.FT
...............82

vi
Lista de Abreviaturas
EMC Electromagnetic compatibility
EMI Electromagnetic Interference
PCB Printed Circuit Board
PWM Pulse Width Modulation
IGBT Insulated Gate Bipolar Transistors
MOSFET Metal Oxide Semicondutor Field Effect Transistor
CM Common Mode
CMR Common Mode Rejection
DM Differential Mode
DC Direct Current
HP Hewlett Packard
ESR Equivalent Series Resistance
SAEM Sistemas de Accionamentos Electro-Mecânicos
SEM Susceptibilidade Electromagnética
CEE Comunidade Económica Europeia
CE Comunidade Europeia
CEN Comité Europeu de Normalização
CENELEC Comité Europeu para a Normalização Electrotécnica
ETSI Instituto Europeu de Normas das Telecomunicações
IPQ Instituo Português da Qualidade
IEP Instituto Electrotécnico Português
ANACOM Autoridade Nacional de Comunicações
LCEM Laboratório de Compatibilidade Electromagnética
FFT Fast Fourier Transform
Capítulo 1
Introdução
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 2
1. Introdução
Na área tecnológica dedicada aos sistemas de accionamentos electro-mecânicos (SAEM) têm vindo a ser desenvolvidas diversas linhas de trabalho dedicadas à análise, compreensão e resolução de problemas decorrentes da complexidade electromagnética que caracteriza os referidos sistemas de accionamento [Skibinski, 1999].
Situações como perturbações do funcionamento na presença de outros sistemas vizinhos, falha de dispositivos de segurança e ocorrência de avarias inesperadas e difíceis de explicar, motivaram desde há longo tempo estes estudos [Ott, 1988], [Duff, 1988], [Ellis, 1998], [Skibinski, 1999], [Kerkman 2003].
É comum acontecer, durante o desenvolvimento, que as medidas constituintes do sistema, quer de tipo analógico, quer de tipo digital, revelam perturbações de funcionamento importantes, por vezes altamente inesperadas e criticas, só explicáveis por meio dos conceitos de EMC.
Actualmente a compreensão e integração prática destes conhecimentos ao nível do projecto de sistemas electrónicos de accionamento é uma fase óbvia, mas que necessita ainda de muito trabalho de sistematização, na aplicação a cada caso, bem como da introdução no projecto, dos elementos técnicos necessários. Trata-se aqui de elementos especificamente destinados à compatibilidade electromagnética (EMC) (cabos blindados, ferrites, filtros, etc.) e outros, mais no âmbito da instrumentação destinadas a aumentar a segurança de funcionamento (protecções contra erros de funcionamento e avarias graves, etc) e a qualidade e modernidade técnica do mesmo (aquisição de medidas para supervisão e controlo local ou remoto, p. ex.).
Com efeito, a aquisição de medidas das grandezas relevantes do sistema, nomeadamente, as intensidades de corrente nas fases da máquina eléctrica e as respectivas tensões, torna-se essencial para permitir técnicas de controlo avançadas e de elevado desempenho, que recorrem à identificação paramétrica para estimação de parâmetros e de estados, incluindo a velocidade para aplicações do tipo “sensorless”, da máquina que está sob controlo. Refira-se, neste contexto, os trabalhos recentes [Vicente Leite, 2004 (tese de doutoramento)] e [Vicente et al, 2004] para o caso de aplicações baseadas no motor de indução trifásico.
Na presente dissertação o âmbito da aplicação da EMC apenas se restringe ao interior do accionamento do sistema propriamente dito, e entre os seus blocos, deixando para posteriores estudos fora desta dissertação essa parte importante da Inferência Electromagnética sobre outros sistemas vizinhos. A defender esta opção está a constatação de que o sistema corre o risco de não funcionar correctamente se não forem tomados em consideração os aspectos de EMC internos e de que, por maioria de razão, a utilização de técnicas adequadas de referênciação e blindagem contribuem também para uma reduzida interferência sobre sistemas vizinhos.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 3
Existem grandes empresas a desenvolver tecnologia semelhante à que é apresentada na presente dissertação, tecnologia essa que é aplicada na indústria automóvel, nesse âmbito e mais recentemente encontra-se por exemplo um circuito integrado desenvolvido pela Infineon Technologies, que é o TLE6280GP, cujo objectivo é o controlo de motores de indução na indústria automóvel. Este integrado é um drive de MOSFET para três ou seis braços, permitindo assim controlar entre 6 ou 12 MOSFET. Possui a particularidade de controlar independentemente cada um, com uma fonte de alimentação para o controlo de cada MOSFET que é também independente, como acontece na solução apresentada na dissertação e aproveita também a alimentação do barramento DC para efectuar essa alimentação. Este integrado é utilizado para motores de indução aplicados na direcção assistida, em bombas de água, nas ventoinhas de arrefecimento, etc.
1.1. Objectivos do trabalho
Neste enquadramento de ideias afigurou-se como essencial realizar um estudo actualizado da literatura específica dedicada à EMC no âmbito dos SAEM, exercitar as soluções técnicas principais para os problemas decorrentes da interferência electromagnética (EMI) ao nível da fonte, do canal e do receptor (susceptibilidade electromagnética - SEM) e realizar e avaliar um protótipo demonstrativo cujo projecto foi orientado especificamente para este fim.
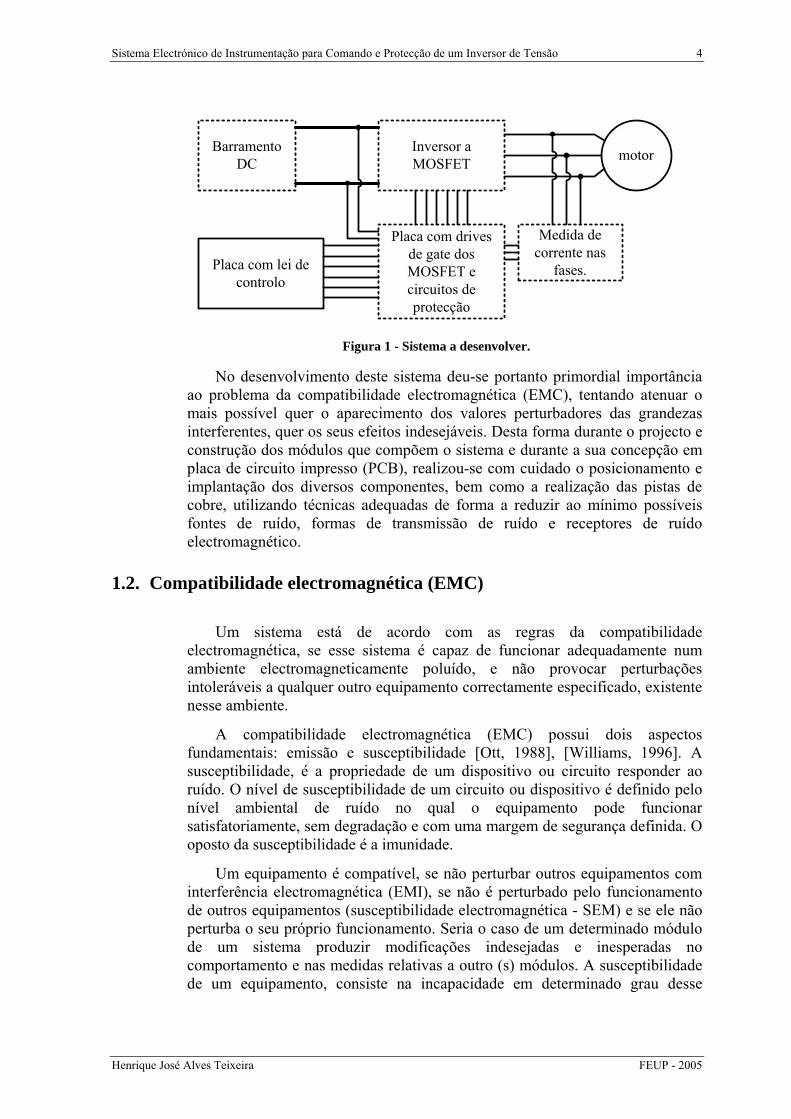
Este protótipo foi definido como um sistema electrónico modular, que permitisse controlar de forma avançada um motor de indução trifásico, que poderá, por exemplo, accionar um veículo eléctrico a baterias. O sistema terá a funcionalidade de possibilitar a aquisição de diversas grandezas, utilizando por exemplo os sistemas desenvolvidos em [Teixeira, 1999] e [Teixeira, 2001], os quais permitem a cada instante verificar o que está a acontecer através da recolha de medidas das tensões entre as linhas de fase do motor, das correntes nas mesmas linhas de fase, bem como recolher as medidas da tensão e corrente no barramento DC, à entrada do inversor. Na figura 1, está representado, em termos de diagrama de blocos, o sistema completo, bem como as suas principais funções. A tracejado estão destacados os módulos que foram objecto do presente trabalho.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 4
Placa com lei decontrolo
Inversor aMOSFET
BarramentoDC
Placa com drivesde gate dosMOSFET ecircuitos deprotecção
Medida decorrente nas
fases.
motor
Figura 1 - Sistema a desenvolver.
No desenvolvimento deste sistema deu-se portanto primordial importância ao problema da compatibilidade electromagnética (EMC), tentando atenuar o mais possível quer o aparecimento dos valores perturbadores das grandezas interferentes, quer os seus efeitos indesejáveis. Desta forma durante o projecto e construção dos módulos que compõem o sistema e durante a sua concepção em placa de circuito impresso (PCB), realizou-se com cuidado o posicionamento e implantação dos diversos componentes, bem como a realização das pistas de cobre, utilizando técnicas adequadas de forma a reduzir ao mínimo possíveis fontes de ruído, formas de transmissão de ruído e receptores de ruído electromagnético.
1.2. Compatibilidade electromagnética (EMC)
Um sistema está de acordo com as regras da compatibilidade electromagnética, se esse sistema é capaz de funcionar adequadamente num ambiente electromagneticamente poluído, e não provocar perturbações intoleráveis a qualquer outro equipamento correctamente especificado, existente nesse ambiente.
A compatibilidade electromagnética (EMC) possui dois aspectos fundamentais: emissão e susceptibilidade [Ott, 1988], [Williams, 1996]. A susceptibilidade, é a propriedade de um dispositivo ou circuito responder ao ruído. O nível de susceptibilidade de um circuito ou dispositivo é definido pelo nível ambiental de ruído no qual o equipamento pode funcionar satisfatoriamente, sem degradação e com uma margem de segurança definida. O oposto da susceptibilidade é a imunidade.
Um equipamento é compatível, se não perturbar outros equipamentos com interferência electromagnética (EMI), se não é perturbado pelo funcionamento de outros equipamentos (susceptibilidade electromagnética - SEM) e se ele não perturba o seu próprio funcionamento. Seria o caso de um determinado módulo de um sistema produzir modificações indesejadas e inesperadas no comportamento e nas medidas relativas a outro (s) módulos. A susceptibilidade de um equipamento, consiste na incapacidade em determinado grau desse
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 5
equipamento funcionar na presença de uma perturbação electromagnética.
Uma das componentes mais importantes no estudo da compatibilidade electromagnética (EMC), são os cabos, pois podem funcionar como antenas que absorvem ou irradiam ruído. Assim, os cabos devem ser o mais curtos possível, e devem ser utilizados de forma evitar-se que introduzam acoplamento capacitivo ou eléctrico, acoplamento indutivo ou magnético e acoplamento electromagnético.
1.3. Segurança eléctrica e uso dos condutores e sistemas de protecção
De forma a garantir a protecção e segurança das pessoas, as instalações eléctricas devem ser dotadas com sistemas que garantam a protecção de pessoas contra contactos, a protecção contra sobreintensidades e a protecção contra sobretensões.
A protecção contra contactos é assegura pela adopção de medidas de segurança, como por exemplo as formas de ligação das massas à terra e a existência ou não de terras separadas para o neutro e protecção de massas, mais conhecidas como regimes de neutro. Nesse sentido são conhecidos três tipos de regimes de neutro:
• Sistema TT, em que o neutro é ligado à terra de serviço, as massas são ligadas à terra de protecção e a terra do neutro (terra de serviço) é separada da terra de protecção das massas;
• Sistema TN, o neutro é ligado à terra de serviço, as massas são ligadas directamente ao neutro através de condutor com funções simultâneas de N (neutro) e PE (protecção);
• Sistema IT, o neutro é isolado ou é ligado à terra de serviço através de uma impedância. As massas são ligadas directamente à terra de protecção das massas.
O sistema de terra das instalações têm por objectivo referenciar ao potencial zero (por convenção) quer o neutro das instalações, quer as massas, sendo fundamentais para o funcionamento eficiente dos sistemas de protecção de pessoas e bens. Daí ser comum nas instalações eléctricas realizar-se as chamadas ligações equipotenciais, que permitem eliminar a possibilidade de ocorrência de aparecimento de tensões de contacto perigosas entre diferentes elementos das instalações eléctricas.
1.4. Ruído
O ruído é um sinal eléctrico presente num circuito para além do sinal desejado [Ott, 1988].
O ruído pode ser agrupado em três subcategorias em função do tipo de fonte:
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 6
• Fontes de ruído intrínsecas, que aparecem devido a flutuações aleatórias dos sistemas físicos, tais como a temperatura, etc.
• Fontes de ruído criadas pelo homem, tais como motores eléctricos, interruptores, electrónica digital, transmissões rádio, descargas electrostáticas (ESD), detonação nuclear, etc.
• Ruído devido a perturbações naturais, tais como relâmpagos, ruído térmico, radiação cósmica a partir do espaço, etc.
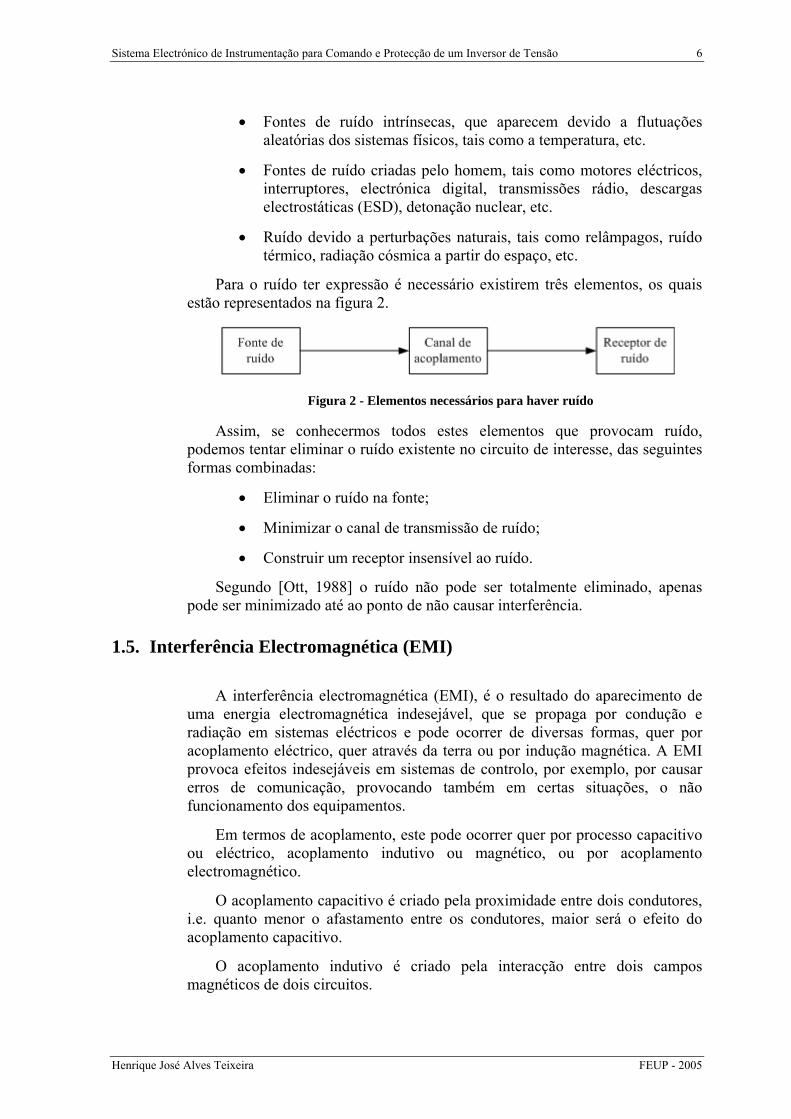
Para o ruído ter expressão é necessário existirem três elementos, os quais estão representados na figura 2.
Figura 2 - Elementos necessários para haver ruído
Assim, se conhecermos todos estes elementos que provocam ruído, podemos tentar eliminar o ruído existente no circuito de interesse, das seguintes formas combinadas:
• Eliminar o ruído na fonte;
• Minimizar o canal de transmissão de ruído;
• Construir um receptor insensível ao ruído.
Segundo [Ott, 1988] o ruído não pode ser totalmente eliminado, apenas pode ser minimizado até ao ponto de não causar interferência.
1.5. Interferência Electromagnética (EMI)
A interferência electromagnética (EMI), é o resultado do aparecimento de uma energia electromagnética indesejável, que se propaga por condução e radiação em sistemas eléctricos e pode ocorrer de diversas formas, quer por acoplamento eléctrico, quer através da terra ou por indução magnética. A EMI provoca efeitos indesejáveis em sistemas de controlo, por exemplo, por causar erros de comunicação, provocando também em certas situações, o não funcionamento dos equipamentos.
Em termos de acoplamento, este pode ocorrer quer por processo capacitivo ou eléctrico, acoplamento indutivo ou magnético, ou por acoplamento electromagnético.
O acoplamento capacitivo é criado pela proximidade entre dois condutores, i.e. quanto menor o afastamento entre os condutores, maior será o efeito do acoplamento capacitivo.
O acoplamento indutivo é criado pela interacção entre dois campos magnéticos de dois circuitos.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 7
As perturbações electromagnéticas (do tipo EMI), são provocadas principalmente por transições bruscas, quer na tensão, quer na corrente, dado que são caracterizadas por frequências mais elevadas, em geral mais interferentes, por serem mais difíceis de atenuar devido à dificuldade de controlar as impedâncias de onda a elevadas frequências.
De forma a atenuar a EMI, um processo vulgarmente eficaz é colocar uma ferrite em torno do cabo ou condutor. O efeito da ferrite é concentrar nela o campo magnético existente em torno do condutor e introduzir atenuação por perdas magnéticas. Uma das vantagens das ferrites é a sua utilização não necessitar de alteração do circuito para a sua introdução.
Outra das formas de redução da EMI é utilizar planos de blindagem, os quais consistem numa ou várias placas, com um plano condutor, em cobre ou alumínio, tipicamente, com o objectivo de resguardo, colocadas o mais próximo possível do PCB ou dos circuitos a blindar. Em alternativa também se pode recorrer a utilizar o plano ou superfície de blindagem em volta de um módulo completo e mesmo do sistema. Associados às blindagens, por vezes utiliza-se condensadores de passagem.
1.6. Directivas e Marcação CE
Desde há alguns anos a esta parte, tem vindo a crescer a preocupação relativa à regulamentação da EMC. Em Novembro de 1987, pela primeira vez, na então Comunidade Económica Europeia (CEE) foi proposta a primeira directiva para regulamentar a EMC, directiva essa que entrou em vigor em 1989 com a sigla 89/336/CEE contendo trinta artigos, cujo objectivo era ajudar a controlar a poluição electromagnética em todos os países dentro da comunidade. Esta directiva era aplicada a todos os equipamentos que poderiam provocar ou ser afectados por alterações electromagnéticas, como é o caso dos equipamentos de telecomunicações, rádio, indústria, equipamentos científicos e médicos e os electrodomésticos. Com esta directiva em vigor, só poderiam ser comercializados equipamentos que cumprissem os requisitos referidos nela, sendo todos os outros proibidos de serem comercializados.
Assim, a Comunidade Europeia necessitou de criar uma marca de conformidade para todos os equipamentos que cumprissem pelo menos os requisitos mínimos da directiva e outras apropriadas a esse determinado tipo de equipamento, e não só as referentes à EMC. De acordo com a Directiva 93/68/CEE, todos os equipamentos para poderem ser comercializados livremente deveriam possuir a marcação “CE”, a qual indica que esse equipamento cumpre os requisitos mínimos da Directiva de EMC. A marcação «CE» deve ter uma altura gráfica de, pelo menos, 5mm. Deve ser aposta no aparelho ou na sua placa sinalética.
A Directiva 89/336/CEE foi recentemente revogada pela Directiva 2004/108/CE, em 15 de Dezembro de 2004, para completar, reforçar e clarificar o quadro estabelecido pela Directiva anterior, apesar da anterior ser só totalmente extinta em 20 de Julho de 2007.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 8
Fora da Directiva 89/336/CEE ficaram determinados tipos de equipamentos, como é o caso dos Automóveis, os quais são regulados pela Directiva 95/54/CE, agora também revogada pela Directiva 2004/104/EC.
A concepção e o fabrico de equipamentos estão sujeitos a requisitos essenciais relacionados com a compatibilidade electromagnética. Esses requisitos deverão estar de acordo com as normas europeias harmonizadas, a adoptar pelos vários organismos europeus de normalização, como é o caso do Comité Europeu de Normalização (CEN), o Comité Europeu para a Normalização Electrotécnica (CENELEC) e o Instituto Europeu de Normas das Telecomunicações (ETSI).
Em Portugal existem dois organismos que possuem laboratórios acreditados pelo Instituto Português da Qualidade (IPQ), que permitem efectuar testes de conformidade para a atribuição da marcação «CE», os quais são o Laboratório de Compatibilidade Electromagnética do Instituto Electrotécnico Português (IEP) e o Laboratório de Compatibilidade Electromagnética (LCEM) da Autoridade Nacional de Comunicações (ANACOM).
Nestes laboratórios são efectuados diversos ensaios de forma a verificar se o equipamento cumpre os requisitos necessários para a aposição da marcação «CE». No caso do LCEM da ANACOM são efectuados os testes aos equipamentos de forma a cumprirem as seguintes normas: EN 50081-1, EN 55014-1, EN 55022, EN 55011, EN 55015, EN 61000-4-2, EN 61000-4-3, EN 61000-4-4, EN 61000-4-5 e EN 61000-4-6. Para isso este organismo dispõe de diversos dispositivos, entre os quais uma câmara semi-anecóica, que permite a realização de ensaios de imunidade quer conduzida quer radiada.
1.7. O seguimento desta dissertação
A dissertação está estruturada em quatro capítulos.
No segundo capítulo, intitulado “Fenómenos Electromagnéticos e formas de controlo do aparecimento, propagação e efeitos”, serão apresentados diversos tipos de acoplamentos provocados pelo funcionamento do inversor, como é o caso do acoplamento capacitivo e do acoplamento indutivo, bem como os problemas associados a esses tipos de acoplamento. Será abordado o assunto relativo às directivas Europeias que regulamentam a compatibilidade electromagnética e a marcação “CE”. Serão apresentadas diversas soluções para a redução dos efeitos abordados no capítulo anterior e provocados pelo inversor, soluções essas que serão tidas em consideração ao longo do desenvolvimento do trabalho.
No terceiro capítulo intitulado “Concepção e desenvolvimento do sistema para condução avançada do motor de indução trifásico”, serão descritos todos os passos realizados durante o desenvolvimento do trabalho, e serão descritas detalhadamente cada uma das partes que constituem o sistema final, referindo ainda os teste realizados com cada uma dessas partes individualmente, para depois passar à parte de integração.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 9
No quarto capítulo intitulado “Resultados experimentais”, serão apresentados os resultados de todo o trabalho desenvolvido nos capítulos anteriores, onde podemos verificar os efeitos provocados pelo inversor e formas de redução do ruído gerado, utilizando técnicas abordadas ao longo da presente dissertação. Será também apresentado um conjunto alargado de figuras para permitirem ilustrar de uma forma detalhada todos os efeitos que advêm da utilização deste tipo de inversores. Também será apresentado o protótipo conseguido no decorrer do trabalho.
A completar a dissertação inclui-se a bibliografia, composta por referências e bibliografia consultada, e os anexos, os quais são compostos pelas folhas de características dos componentes utilizados na construção do sistema, as características dos equipamentos utilizados para efectuar as diversas medidas e pelo esquema eléctrico do sistema completo.
1.8. Conclusão
Neste capítulo começamos por explicar a motivação para o desenvolvimento da presente dissertação, bem como a área onde se insere o estudo abordado.
De seguida foi feita uma breve descrição do que se pretende desenvolver, assim como os objectivos principais a atingir.
Em segundo lugar, introduziu-se o tema da compatibilidade electromagnética, onde foi explicada de uma forma sucinta o significado da EMC.
Em terceiro lugar, foi considerada a segurança eléctrica nas instalações eléctricas.
Em quarto considerou-se a natureza do ruído, explicando o que se entende por ruído, formas de propagação, elementos necessários para a existência do ruído e formas de atenuação do ruído.
Em quinto lugar falamos sobre a interferência electromagnética, explicando o que é a EMI, formas de acoplamento da EMI e formas de minimização.
Em sexto lugar falamos sobre as Directivas Europeias que regulamentam a compatibilidade electromagnética, sobre a necessidade de os produtos comercializados necessitarem da marcação “CE”, bem como dos organismos que regulamentam e atribuem a referida marcação. Outras normas foram também consideradas.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 10
Capítulo 2
Fenómenos Electromagnéticos e formas de controlo do
aparecimento, propagação e efeitos
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 11
2. Fenómenos Electromagnéticos
O acoplamento electromagnético é o acoplamento que existe entre circuitos que são electricamente independentes e não possuem nenhuma impedância comum. Todos os circuitos radiam campos electromagnéticos quando são percorridos por correntes.
Em termos de acoplamentos electromagnético, existem o acoplamento capacitivo e o acoplamento indutivo.
2.1. Acoplamento capacitivo
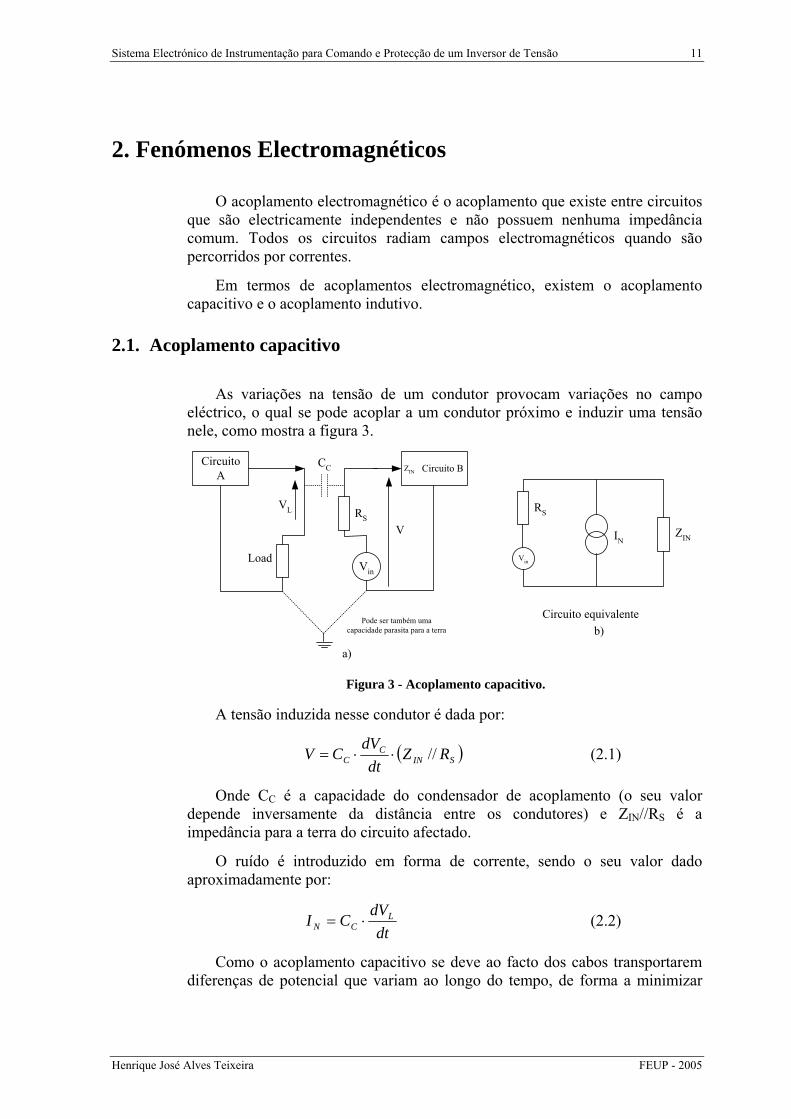
As variações na tensão de um condutor provocam variações no campo eléctrico, o qual se pode acoplar a um condutor próximo e induzir uma tensão nele, como mostra a figura 3.
CircuitoA Circuito B
VinLoad
VL
Pode ser também umacapacidade parasita para a terra
Vin
RS
ZIN
Circuito equivalente
RS
CC
V IN
ZIN
a)
b)
Figura 3 - Acoplamento capacitivo.
A tensão induzida nesse condutor é dada por:
( SINC
C RZdt
dVCV //⋅⋅= ) (2.1)
Onde CC é a capacidade do condensador de acoplamento (o seu valor depende inversamente da distância entre os condutores) e ZIN//RS é a impedância para a terra do circuito afectado.
O ruído é introduzido em forma de corrente, sendo o seu valor dado aproximadamente por:
dtdVCI L
CN ⋅= (2.2)
Como o acoplamento capacitivo se deve ao facto dos cabos transportarem diferenças de potencial que variam ao longo do tempo, de forma a minimizar
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 12
este tipo de acoplamento deveremos limitar o comprimento dos cabos que alimentam o motor e reduzir a frequência de comutação.
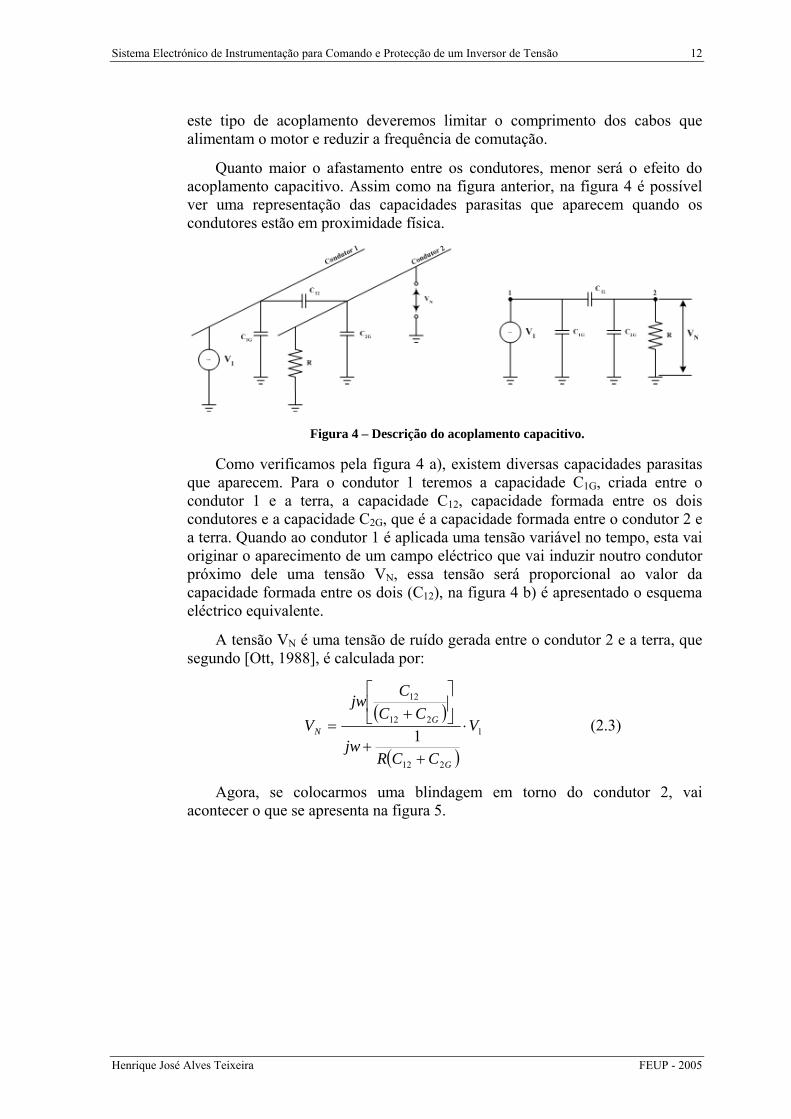
Quanto maior o afastamento entre os condutores, menor será o efeito do acoplamento capacitivo. Assim como na figura anterior, na figura 4 é possível ver uma representação das capacidades parasitas que aparecem quando os condutores estão em proximidade física.
Figura 4 – Descrição do acoplamento capacitivo.
Como verificamos pela figura 4 a), existem diversas capacidades parasitas que aparecem. Para o condutor 1 teremos a capacidade C1G, criada entre o condutor 1 e a terra, a capacidade C12, capacidade formada entre os dois condutores e a capacidade C2G, que é a capacidade formada entre o condutor 2 e a terra. Quando ao condutor 1 é aplicada uma tensão variável no tempo, esta vai originar o aparecimento de um campo eléctrico que vai induzir noutro condutor próximo dele uma tensão VN, essa tensão será proporcional ao valor da capacidade formada entre os dois (C12), na figura 4 b) é apresentado o esquema eléctrico equivalente.
A tensão VN é uma tensão de ruído gerada entre o condutor 2 e a terra, que segundo [Ott, 1988], é calculada por:
( )
( )1
212
212
12
1V
CCRjw
CCC
jwV
G
GN ⋅
++
⎥⎦
⎤⎢⎣
⎡+
= (2.3)
Agora, se colocarmos uma blindagem em torno do condutor 2, vai acontecer o que se apresenta na figura 5.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 13
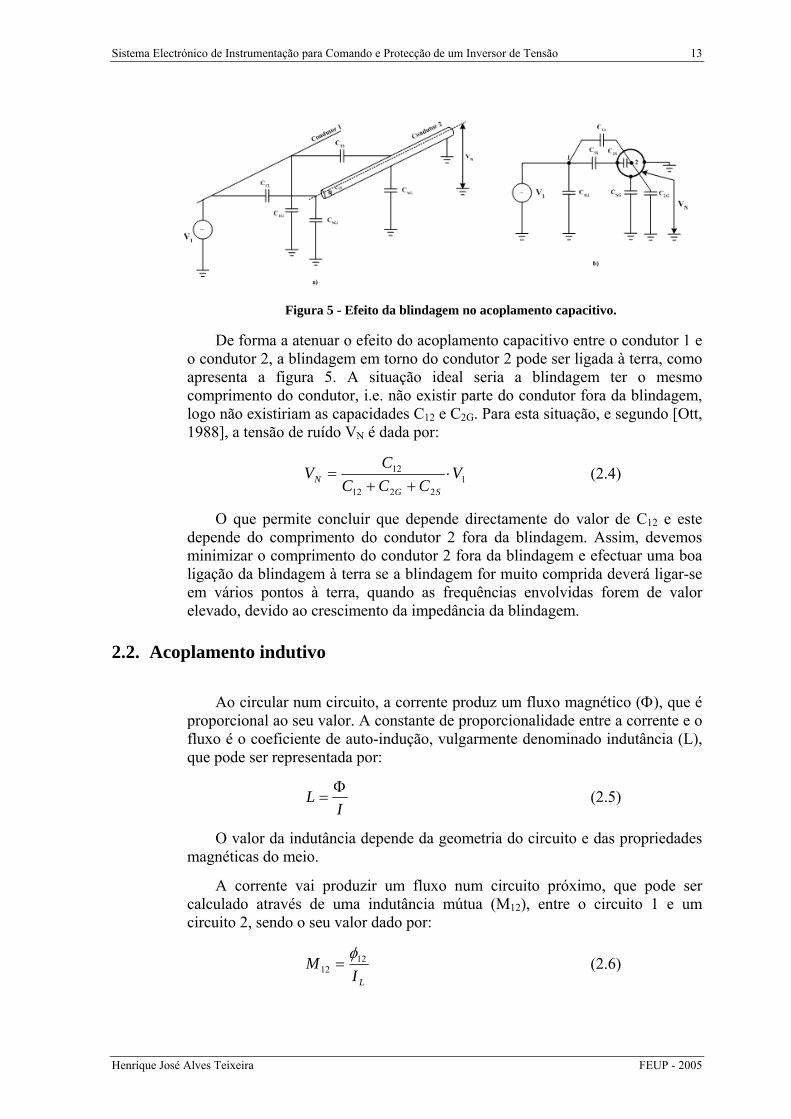
Figura 5 - Efeito da blindagem no acoplamento capacitivo.
De forma a atenuar o efeito do acoplamento capacitivo entre o condutor 1 e o condutor 2, a blindagem em torno do condutor 2 pode ser ligada à terra, como apresenta a figura 5. A situação ideal seria a blindagem ter o mesmo comprimento do condutor, i.e. não existir parte do condutor fora da blindagem, logo não existiriam as capacidades C12 e C2G. Para esta situação, e segundo [Ott, 1988], a tensão de ruído VN é dada por:
12212
12 VCCC
CVSG
N ⋅++
= (2.4)
O que permite concluir que depende directamente do valor de C12 e este depende do comprimento do condutor 2 fora da blindagem. Assim, devemos minimizar o comprimento do condutor 2 fora da blindagem e efectuar uma boa ligação da blindagem à terra se a blindagem for muito comprida deverá ligar-se em vários pontos à terra, quando as frequências envolvidas forem de valor elevado, devido ao crescimento da impedância da blindagem.
2.2. Acoplamento indutivo
Ao circular num circuito, a corrente produz um fluxo magnético (Φ), que é proporcional ao seu valor. A constante de proporcionalidade entre a corrente e o fluxo é o coeficiente de auto-indução, vulgarmente denominado indutância (L), que pode ser representada por:
IL Φ= (2.5)
O valor da indutância depende da geometria do circuito e das propriedades magnéticas do meio.
A corrente vai produzir um fluxo num circuito próximo, que pode ser calculado através de uma indutância mútua (M12), entre o circuito 1 e um circuito 2, sendo o seu valor dado por:
LIM 12
12φ
= (2.6)
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 14
O símbolo Φ12 representa o fluxo no circuito 2 devido à corrente do circuito 1 (IL).
A tensão induzida (VN) no circuito 2, devido ao campo magnético provocado pela densidade de fluxo (B) pode ser obtida a partir da Lei de Faraday, sendo que:
−−
⋅−= ∫ AdBdtdV
AN (2.7)
Onde, e são vectores. Se a densidade de fluxo for sinusoidal e constante ao longo do tempo a expressão anterior, segundo [Ott, 1988], pode ser aproximada a:
−
B−
A
θω cosABjVN = (2.8)
Onde, A é a área do circuito 2, B é o valor eficaz da densidade de fluxo que varia sinusoidalmente a uma frequência ω (rad/seg) incide segundo a direcção afastada θ radianos da normal à superfície considerada e VN é o valor eficaz da tensão induzida.
Então, como θcos⋅⋅ AB representa o fluxo magnético (Φ12) total induzido no circuito 2 (afectado), podemos concluir que, a circulação de corrente alternada num condutor, cria um campo magnético que produz efeito num condutor próximo, e induz neste uma tensão. Essa tensão induzida no condutor (afectado), através da combinação das expressões anteriores, é dada pela expressão seguinte:
dtdiMV L
N −= (2.9)
onde,
• M é o coeficiente de indução mútua que descreve o fenómeno de indutância mútua, apresenta-se em henry.
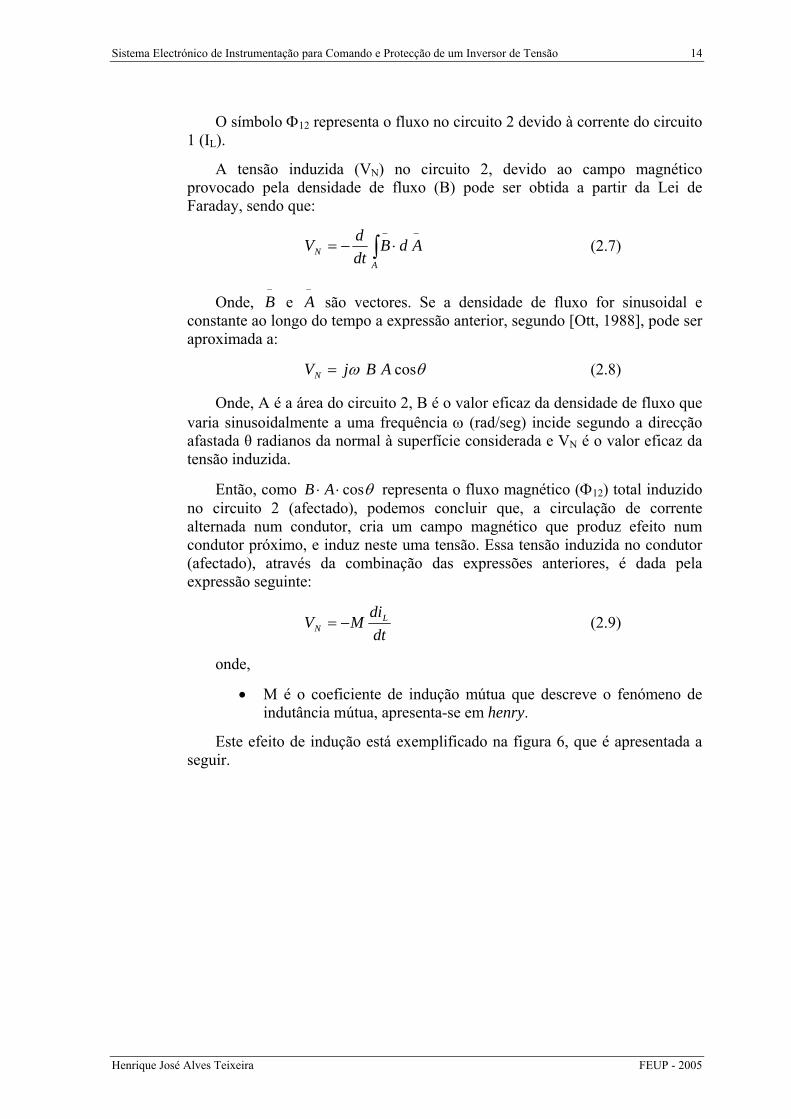
Este efeito de indução está exemplificado na figura 6, que é apresentada a seguir.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 15
Figura 6 – Fenómeno da Indução Magnética.
Na figura 6 b) é apresentado o esquema eléctrico equivalente.
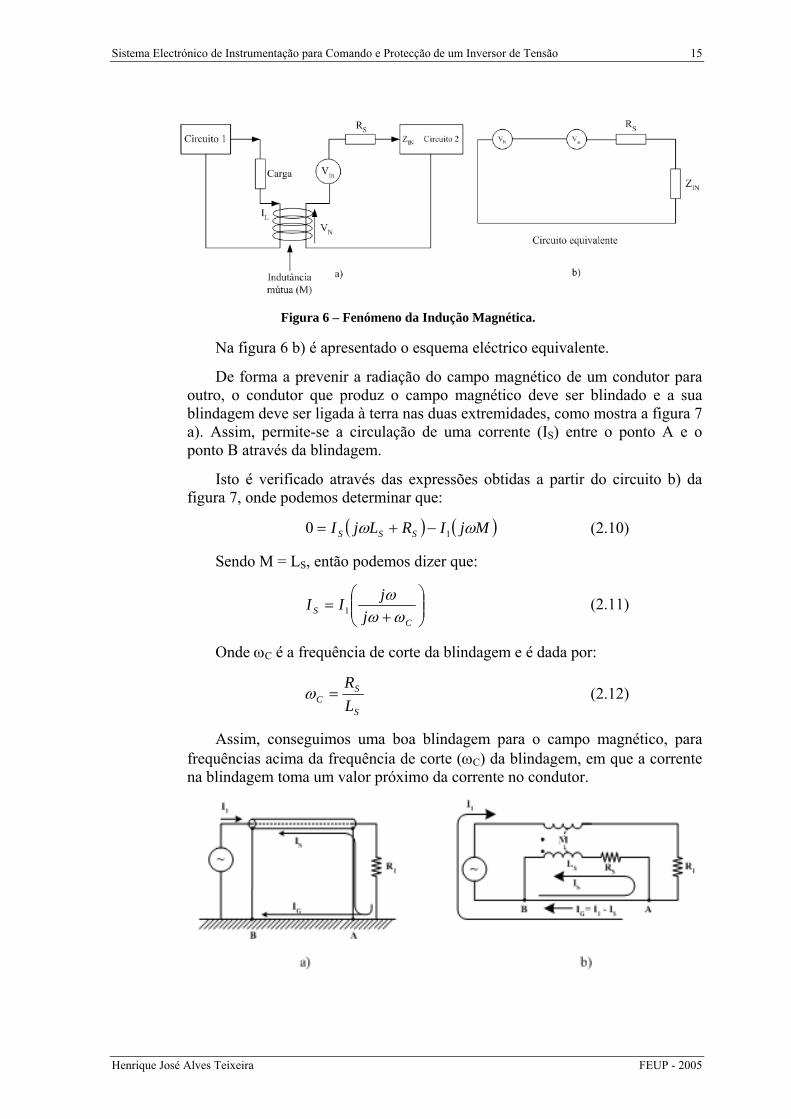
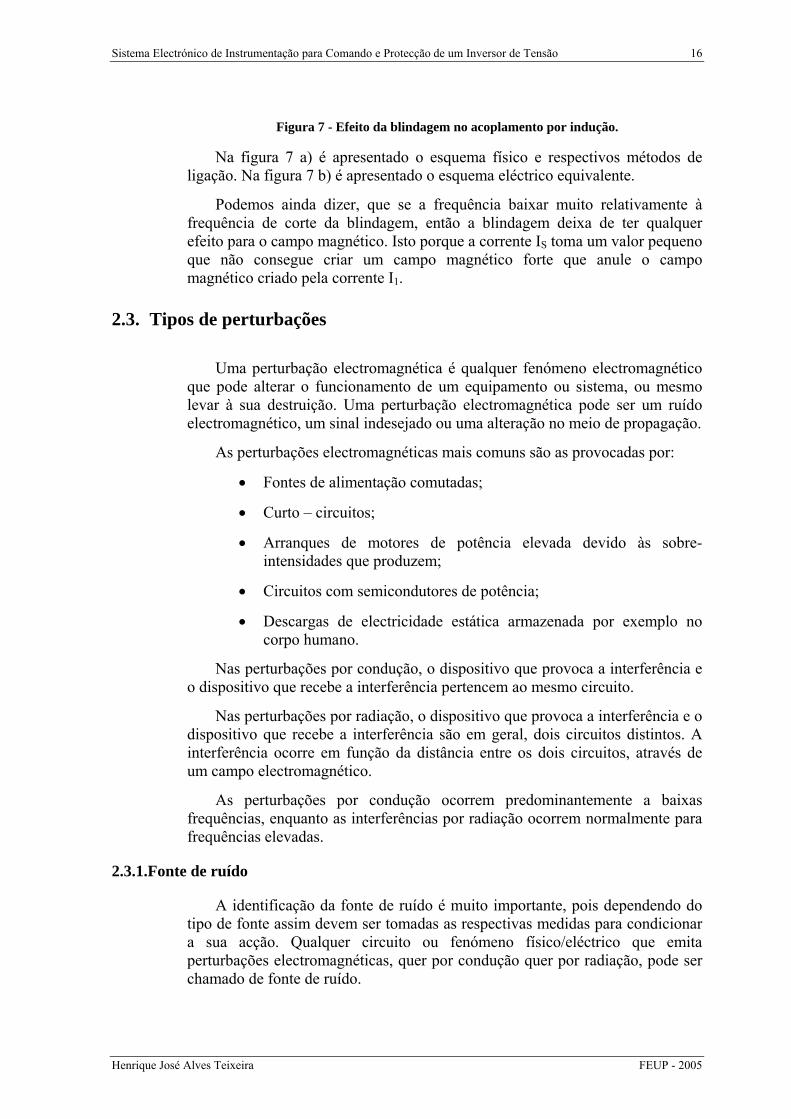
De forma a prevenir a radiação do campo magnético de um condutor para outro, o condutor que produz o campo magnético deve ser blindado e a sua blindagem deve ser ligada à terra nas duas extremidades, como mostra a figura 7 a). Assim, permite-se a circulação de uma corrente (IS) entre o ponto A e o ponto B através da blindagem.
Isto é verificado através das expressões obtidas a partir do circuito b) da figura 7, onde podemos determinar que:
( ) ( )MjIRLjI SSS ωω 10 −+= (2.10)
Sendo M = LS, então podemos dizer que:
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=C
S jjIIωω
ω1 (2.11)
Onde ωC é a frequência de corte da blindagem e é dada por:
S
SC L
R=ω (2.12)
Assim, conseguimos uma boa blindagem para o campo magnético, para frequências acima da frequência de corte (ωC) da blindagem, em que a corrente na blindagem toma um valor próximo da corrente no condutor.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 16
Figura 7 - Efeito da blindagem no acoplamento por indução.
Na figura 7 a) é apresentado o esquema físico e respectivos métodos de ligação. Na figura 7 b) é apresentado o esquema eléctrico equivalente.
Podemos ainda dizer, que se a frequência baixar muito relativamente à frequência de corte da blindagem, então a blindagem deixa de ter qualquer efeito para o campo magnético. Isto porque a corrente IS toma um valor pequeno que não consegue criar um campo magnético forte que anule o campo magnético criado pela corrente I1.
2.3. Tipos de perturbações
Uma perturbação electromagnética é qualquer fenómeno electromagnético que pode alterar o funcionamento de um equipamento ou sistema, ou mesmo levar à sua destruição. Uma perturbação electromagnética pode ser um ruído electromagnético, um sinal indesejado ou uma alteração no meio de propagação.
As perturbações electromagnéticas mais comuns são as provocadas por:
• Fontes de alimentação comutadas;
• Curto – circuitos;
• Arranques de motores de potência elevada devido às sobre-intensidades que produzem;
• Circuitos com semicondutores de potência;
• Descargas de electricidade estática armazenada por exemplo no corpo humano.
Nas perturbações por condução, o dispositivo que provoca a interferência e o dispositivo que recebe a interferência pertencem ao mesmo circuito.
Nas perturbações por radiação, o dispositivo que provoca a interferência e o dispositivo que recebe a interferência são em geral, dois circuitos distintos. A interferência ocorre em função da distância entre os dois circuitos, através de um campo electromagnético.
As perturbações por condução ocorrem predominantemente a baixas frequências, enquanto as interferências por radiação ocorrem normalmente para frequências elevadas.
2.3.1.Fonte de ruído
A identificação da fonte de ruído é muito importante, pois dependendo do tipo de fonte assim devem ser tomadas as respectivas medidas para condicionar a sua acção. Qualquer circuito ou fenómeno físico/eléctrico que emita perturbações electromagnéticas, quer por condução quer por radiação, pode ser chamado de fonte de ruído.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 17
As principais causas da perturbação electromagnética são a distribuição de energia, as ondas de rádio comunicações, as descargas electrostáticas, as descargas eléctricas atmosféricas, etc. Na distribuição de energia eléctrica, a maior parte dos problemas advém do facto de existirem muitas operações de ligar circuitos capacitivos ou desligar circuitos indutivos, exemplo disso são os motores de indução, etc. Nas rádio frequências usadas para telecomunicação, o problema é provocado por sistemas de monitorização remotos, controlo remotos, rádio-comunicação, televisores, telemóveis, etc. As descargas electrostáticas são provocadas na sequência da electrização por exemplo, quando uma pessoa enverga determinadas roupas ou caminha sobre certos tipos de pavimentos. Esta pessoa pode ficar electricamente carregada por causa da denominada tribo-electricidade, e qualquer contacto da mesma com um condutor ou equipamento electrónico produz uma descarga eléctrica rápida.
Em electrónica de potência, o principal tipo de fonte de perturbação é resultante das variações bruscas na tensão. Pois, a tensão pode variar centenas de volt em apenas alguns nanossegundos, o que provoca valores de dv/dt excessivos. Exemplo disso é a geração de PWM (Pulse With Modulation), utilizada para criar uma tensão sinusoidal a partir de uma tensão DC, a partir de variações na tensão que vão desde os zero volt até VDC (114V para o nosso estudo), em pequenos períodos de tempo, nanossegundos ou milissegundos dependendo do tipo de semicondutores utilizados.
As variações rápidas na tensão provocam diversos tipos de perturbações, das quais se destacam a geração de correntes que circulam através dos condensadores parasitas existentes.
Um exemplo disso é o condensador parasita criado entre um semicondutor e o dissipador a que este está ligado, conforme apresentado na figura 8.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 18
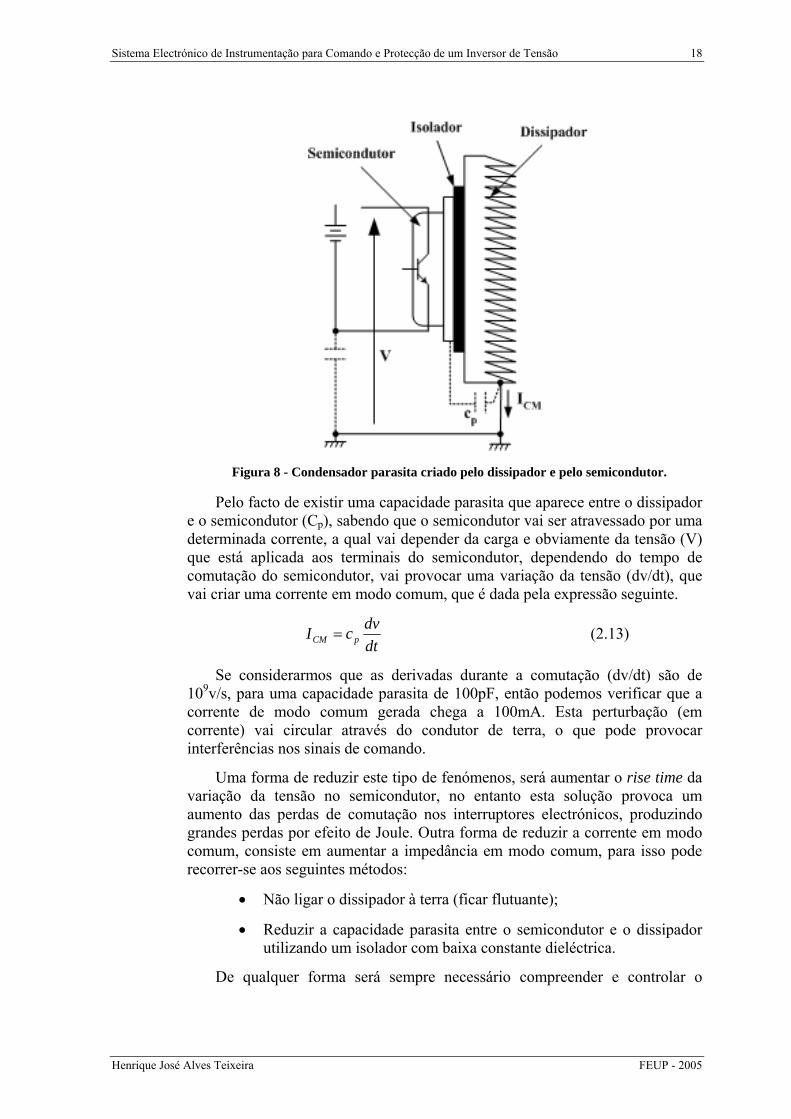
Figura 8 - Condensador parasita criado pelo dissipador e pelo semicondutor.
Pelo facto de existir uma capacidade parasita que aparece entre o dissipador e o semicondutor (Cp), sabendo que o semicondutor vai ser atravessado por uma determinada corrente, a qual vai depender da carga e obviamente da tensão (V) que está aplicada aos terminais do semicondutor, dependendo do tempo de comutação do semicondutor, vai provocar uma variação da tensão (dv/dt), que vai criar uma corrente em modo comum, que é dada pela expressão seguinte.
dtdvcI pCM = (2.13)
Se considerarmos que as derivadas durante a comutação (dv/dt) são de 109v/s, para uma capacidade parasita de 100pF, então podemos verificar que a corrente de modo comum gerada chega a 100mA. Esta perturbação (em corrente) vai circular através do condutor de terra, o que pode provocar interferências nos sinais de comando.
Uma forma de reduzir este tipo de fenómenos, será aumentar o rise time da variação da tensão no semicondutor, no entanto esta solução provoca um aumento das perdas de comutação nos interruptores electrónicos, produzindo grandes perdas por efeito de Joule. Outra forma de reduzir a corrente em modo comum, consiste em aumentar a impedância em modo comum, para isso pode recorrer-se aos seguintes métodos:
• Não ligar o dissipador à terra (ficar flutuante);
• Reduzir a capacidade parasita entre o semicondutor e o dissipador utilizando um isolador com baixa constante dieléctrica.
De qualquer forma será sempre necessário compreender e controlar o
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 19
fenómeno na fonte de forma a limitar as emissões conduzidas.
Outro exemplo de fontes de perturbações radiadas é o das subestações de média e alta tensão, pois podem conter campos electromagnéticos muito fortes. Quando ligamos ou desligamos uma subestação deste tipo, podemos provocar variações na tensão de dezenas de KV em curtos espaços de tempo (nanossegundos), provocado pelo fenómeno do arco eléctrico.
2.3.2.Canal de acoplamento
O canal de acoplamento é o elemento essencial associado à forma de transmissão da perturbação electromagnética da fonte para o receptor.
O acoplamento pode provocar distúrbios, se a energia recebida é suficientemente grande para causar o início de uma acção não desejada.
O grau de acoplamento é expresso em termos de um coeficiente de acoplamento K, expresso em dB (e.g. - 75dB), o qual pode ser visto como a eficiência de transmissão da perturbação desde a fonte de ruído para o potencial receptor.
,log20)(
)(
atransmitid
recebida
AA
K ⋅= (2.14)
Onde,
• A, representa a amplitude da perturbação.
São conhecidos três diferentes modos de acoplamento:
• Acoplamento por modo diferencial, modo comum e modo antena;
• Acoplamento por impedância comum;
• Acoplamento por Crosstalk.
2.3.2.1. Modo diferencial, modo comum e modo antena
O acoplamento em modo diferencial (entre condutores) envolve tensões e correntes, por exemplo, entre duas fases de um circuito ou entre dois condutores que transmitem informação a um equipamento electrónico.
Diz-se que ocorre uma interferência em modo diferencial, quando a corrente do elemento que provoca a interferência utiliza o mesmo caminho que as correntes normais. Assim a corrente principal e a corrente de retorno do elemento que provoca a interferência são iguais mas de sinais diferentes. A perturbação em modo diferencial circula nos condutores de alimentação.
Considerando duas partes de um equipamento interligadas por um cabo, o qual transporta sinais em corrente no modo diferencial. Um campo radiado pode acoplar-se ao sistema e uma interferência em modo diferencial pode ser induzida entre os dois condutores, similarmente a corrente diferencial irá induzir um campo radiado nela própria, como se apresenta na figura 9.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 20
Figura 9 - Acoplamento em modo diferencial.
Como podemos verificar pela figura 9, a malha de terra não é perturbada por este tipo de acoplamento.
O acoplamento em modo comum (condutor - terra) gera perturbações em modo comum quer tensão quer em corrente. Uma perturbação de tensão em modo comum é uma tensão que afecta todos os condutores activos. Uma perturbação de corrente em modo comum, é uma corrente que circula através de todos os condutores principais no mesmo sentido.
Diz-se que ocorre uma perturbação em modo comum, quando a corrente do circuito que provoca a interferência é adicionada com idêntico sinal a todas as correntes principais do circuito, utilizando partes condutoras do circuito, tais como:
• Partes metálicas de caixas;
• Condutores de protecção;
• Estruturas metálicas do edifício;
• Massas;
• Etc.
A perturbação em modo comum, aparece normalmente a partir do condutor de fase e do condutor de massa para a terra.
Como mostra a figura 10, o cabo transporta a corrente em modo comum, i.e., os condutores transportam a corrente todos no mesmo sentido, essas correntes podem ser induzidas por um campo de acoplamento externo formado pelo anel criado pelo cabo. O mecanismo típico de actuação deste processo devido às assimetrias, é provocar correntes diferenciais internas às quais o equipamento é susceptível. Alternativamente, essas correntes podem ser geradas por tensões de ruído internas entre o ponto de referência da terra e a ligação do cabo e ser responsável pelas emissões radiadas.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 21
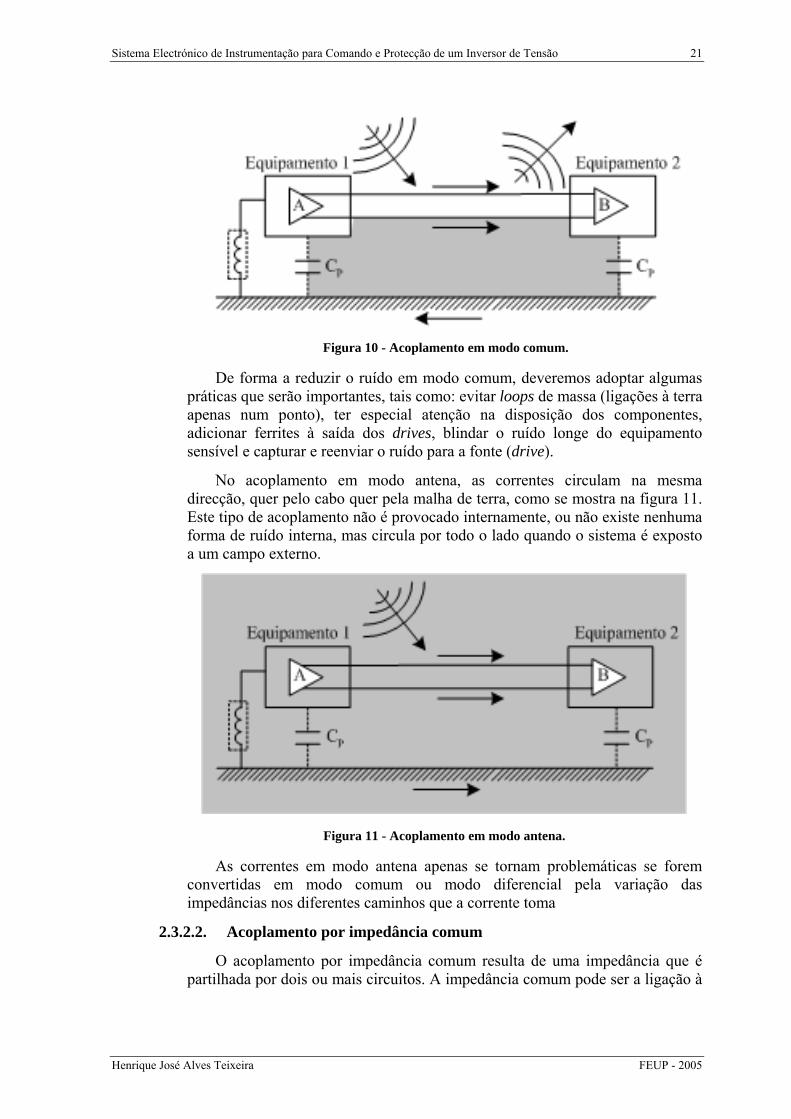
Figura 10 - Acoplamento em modo comum.
De forma a reduzir o ruído em modo comum, deveremos adoptar algumas práticas que serão importantes, tais como: evitar loops de massa (ligações à terra apenas num ponto), ter especial atenção na disposição dos componentes, adicionar ferrites à saída dos drives, blindar o ruído longe do equipamento sensível e capturar e reenviar o ruído para a fonte (drive).
No acoplamento em modo antena, as correntes circulam na mesma direcção, quer pelo cabo quer pela malha de terra, como se mostra na figura 11. Este tipo de acoplamento não é provocado internamente, ou não existe nenhuma forma de ruído interna, mas circula por todo o lado quando o sistema é exposto a um campo externo.
Figura 11 - Acoplamento em modo antena.
As correntes em modo antena apenas se tornam problemáticas se forem convertidas em modo comum ou modo diferencial pela variação das impedâncias nos diferentes caminhos que a corrente toma
2.3.2.2. Acoplamento por impedância comum
O acoplamento por impedância comum resulta de uma impedância que é partilhada por dois ou mais circuitos. A impedância comum pode ser a ligação à
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 22
massa, a rede de terra comum, a linha de distribuição de potência, o condutor de retorno partilhado por vários sinais de baixa potência, etc.
Figura 12 - Acoplamento por impedância comum.
Para baixas frequências a impedância comum é normalmente pequena. Por exemplo, a impedância a 50 Hz entre dois pontos da rede é normalmente menor que 1Ω, mas a mesma impedância pode ser muito maior para frequências típicas de perturbação, a qual pode atingir valores da ordem dos kΩ. Nestas frequências, UC (figura 12) poderá assumir valores não desprezáveis face a E1 ou E2.
2.3.3.Receptor de ruído
Qualquer equipamento que possa ser afectado por uma perturbação pode ser considerado como uma “vítima”. Normalmente trata-se de equipamentos que contêm circuitos electrónicos que funcionam mal quando ocorre uma perturbação electromagnética numa dada banda de frequência não contemplada.
As perturbações no funcionamento do equipamento podem ser divididas em três categorias, as quais são:
• Permanente;
• Aleatórias e não repetitivas, aparecem quando a perturbação aparece;
• Falha permanente do equipamento (componentes fisicamente destruídos).
Certas perturbações podem ser aceitáveis para um tempo limite, tais como as perdas temporárias num display, outras podem não ser aceites, tais como a avaria num equipamento de segurança.
Algumas das soluções em termos de como o equipamento será construído podem ser tomadas de forma a aumentar a imunidade ás perturbações electromagnéticas, de forma a baixar o seu custo, como sejam:
• No desenho do PCB (dividir os circuitos, disposição, ligações, etc.);
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 23
• Na escolha dos componentes electrónicos;
• Na escolha e implementação de uma blindagem de protecção;
• Nas ligações à terra;
• Nos condutores.
As escolhas envolvem diversos conceitos, e devem ser feitas durante a fase de projecto de forma a evitar custos adicionais, os quais são sempre maiores quando as modificações são realizadas depois do projecto estar concluído ou quando o produto já está pronto para entrar no mercado.
O projecto de PCB deve seguir determinadas regras no que concerne à disposição e divisão funcional. Assim, devemos começar por colocar os componentes, o que permite reduzir os efeitos de acoplamento relacionados com a proximidade. No desenho das pistas, o qual tem uma importância essencial na susceptibilidade, i.e., o mesmo circuito implementado de diferentes formas pode apresentar níveis de imunidade diferentes, como seja um circuito com um “etch” mínimo reduz o efeito de radiação e a sensibilidade.
Em termos de componentes electrónicos, existem muitos que possuem protecção contra perturbações conduzidas. Para perturbações em modo comum num circuito de potência, pode utilizar-se um transformador se as perturbações têm frequências menores que 1KHz e um filtro se são de frequências elevadas.
Em termos de blindagem, podemos colocar o equipamento dentro de uma blindagem condutora, o que fornece protecção contra campos electromagnéticos. Para perturbações de altas-frequências ou campos eléctricos, um condutor isolado a verniz pode ser eficiente. Apenas um material com alta permeabilidade pode proteger contra campos magnéticos de baixa frequência.
Em relação às ligações à terra, uma boa continuidade eléctrica entre partes diferentes de uma caixa de blindagem é extremamente importante. Deve ser cuidadosa e correctamente interligada, por exemplo, proteger as áreas de contacto de qualquer parte e também utilizar condutores curtos, de forma a reduzir ao mínimo a impedância.
Em relação à cablagem, os cabos blindados funcionam como uma espécie de envelope condutor, colocado em torno de um sistema sensível. Devem ser o mais curtos possível e se possível em todo o perímetro para proteger contra perturbações de alta-frequência.
2.4. Formas de redução dos fenómenos electromagnéticos
Existem variados métodos para a redução do ruído electromagnético, quer através do aumento da distância entre os circuitos, quer através da utilização de blindagens, quer através da colocação ou arranjo dos circuitos de forma a eles serem simétricos ou orientados para minimizar a captação magnética, etc.
Uma das formas de redução do acoplamento electromagnético é através da
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 24
blindagem dos condutores, a qual em termos ideais deveria ter uma impedância para a massa de valor nulo.
Outra das formas de redução, é através da ligação da blindagem à terra em vários pontos (normalmente), mas que não protege o circuito contra campos magnéticos de baixa frequência. Para isso, poderá colocar-se os condutores dentro de um condutor oco ou blindagem com propriedades ferromagnéticas. A seguir apresentam-se algumas técnicas de ligação das blindagens à terra.
2.4.1.Formas de ligação das blindagens à terra
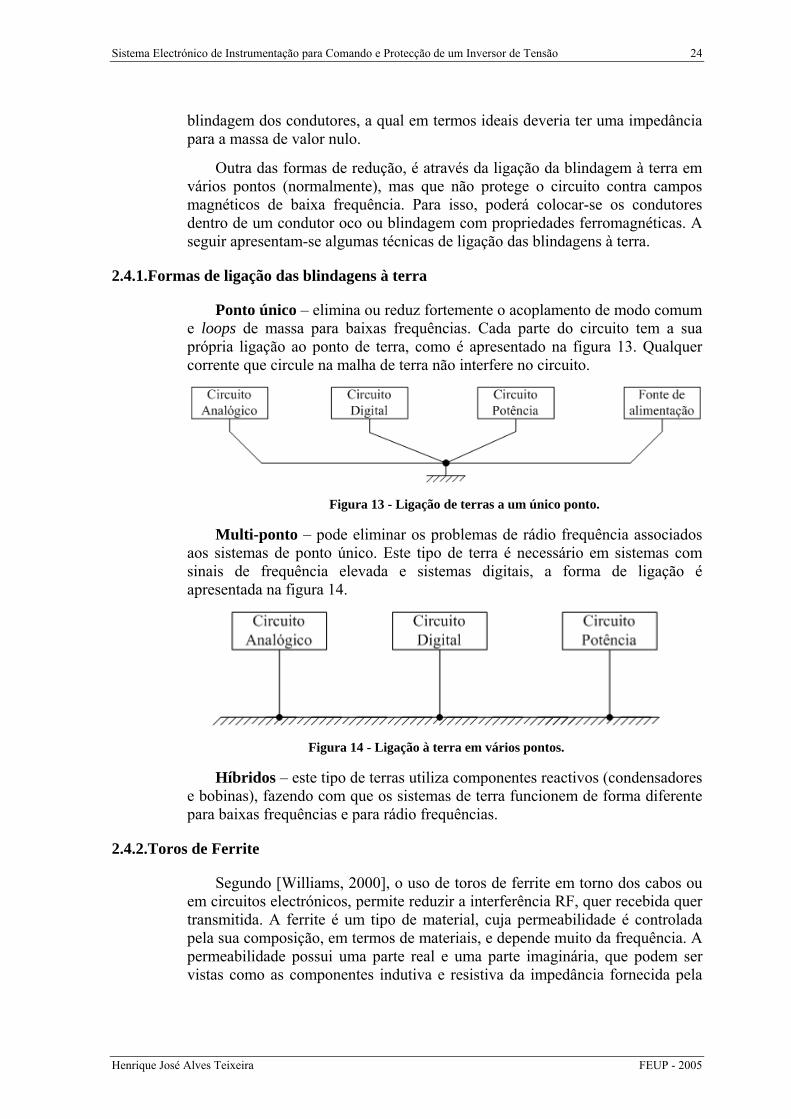
Ponto único – elimina ou reduz fortemente o acoplamento de modo comum e loops de massa para baixas frequências. Cada parte do circuito tem a sua própria ligação ao ponto de terra, como é apresentado na figura 13. Qualquer corrente que circule na malha de terra não interfere no circuito.
Figura 13 - Ligação de terras a um único ponto.
Multi-ponto – pode eliminar os problemas de rádio frequência associados aos sistemas de ponto único. Este tipo de terra é necessário em sistemas com sinais de frequência elevada e sistemas digitais, a forma de ligação é apresentada na figura 14.
Figura 14 - Ligação à terra em vários pontos.
Híbridos – este tipo de terras utiliza componentes reactivos (condensadores e bobinas), fazendo com que os sistemas de terra funcionem de forma diferente para baixas frequências e para rádio frequências.
2.4.2.Toros de Ferrite
Segundo [Williams, 2000], o uso de toros de ferrite em torno dos cabos ou em circuitos electrónicos, permite reduzir a interferência RF, quer recebida quer transmitida. A ferrite é um tipo de material, cuja permeabilidade é controlada pela sua composição, em termos de materiais, e depende muito da frequência. A permeabilidade possui uma parte real e uma parte imaginária, que podem ser vistas como as componentes indutiva e resistiva da impedância fornecida pela
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 25
ferrite, quando utilizada como um toróide.
)()()( fjwLfRfZ += (2.15)
A proporção entre uma componente e outra varia com a frequência. Para frequências elevadas, a sua impedância é predominantemente resistiva.
Figura 15 - Esquema eléctrico equivalente de uma ferrite.
As ferrites, para correntes em modo diferencial não produzem efeito algum, visto que em modo diferencial o campo magnético criado pela corrente de alimentação é anulado pelo campo magnético criado pela corrente de retorno.
No entanto, as ferrites produzem efeito para correntes em modo comum pois aumentam a impedância dos condutores abrangidos para essas correntes.
Como a ferrite é um material cerâmico, com elevada permeabilidade e permitividade, aumenta o coeficiente de indução mútua entre os cabos que estão envolvidos por esta. Isto pode ser utilizado de forma vantajosa, se colocarmos a ferrite próxima de uma superfície metálica com ligação à terra, porque criamos um filtro L-C, que utiliza a ferrite como indutância e como condensador, [Williams, 2000].
Um dos problemas das ferrites é a saturação que ocorre quando os condutores associados são atravessados por correntes elevadas de baixa frequência. Em saturação as ferrites deixam de produzir efeitos apreciáveis de atenuação no ruído de modo comum.
2.4.3.Filtros EMI/RFI
Existem vários fabricantes de filtros para reduzir os efeitos das EMI/RFI, sendo normalmente estes constituídos por condensadores e bobines.
Segundo [Skibinski, 1999], os filtros EMI são tipicamente constituídos em primeiro lugar por filtros L-C, os quais devem ser dimensionados de forma a implementarem uma atenuação de -40dB para a frequência de ressonância, a qual é dada pela expressão:
CLf R
⋅⋅⋅=
π21 (2.16)
O objectivo dos filtros EMI é minimizar a passagem da corrente de ruído de modo comum para a terra.
Os filtros RFI, têm por objectivo eliminar as interferências provocadas pelas emissões de rádio frequência
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 26
2.4.4.Formas de redução de ruído na concepção do PCB
Uma das melhores formas de construção do PCB, é começar por desenhar as massas, depois os percursos dos sinais de alta-frequência e só depois os restantes sinais.
Deve evitar-se a circulação de correntes pelas massas. Tentar minimizar o valor da impedância da pista de massa. O plano de massas não deve ter quebras no sentido de circulação das correntes, nem que para isso seja necessário incluir uma pequena ligação através de um fio de um lado para o outro. O plano de massas é uma ferramenta essencial ao combate do “crosstalk” digital.
Durante a concepção das placas de circuito impresso (PCB), que constituem o sistema electrónico desenvolvido, teve-se em atenção diversos aspectos:
• Evitar a criação de anéis ou malhas “Loop Antenna”, de forma a não produzir nem captar radiações imprevistas;
• Criar planos de massa sólidos, de forma a fornecer uma referência estável para todas as componentes do circuito.
2.4.5.Cuidados a ter na escolha dos circuitos integrados
Outra das formas para tentar reduzir o ruído electromagnético e para tornar o sistema desenvolvido electromagneticamente compatível, consiste em escolher os circuitos integrados a utilizar tendo em atenção essa preocupação, assim tentamos ter em consideração os seguintes aspectos:
• Os pinos da massa e da alimentação estarem adjacentes, serem múltiplos e estarem centrados;
• Possuírem sinal balanceado;
• Possuírem baixos níveis de emissões (EMI);
• De preferência com lógica não saturada;
• Elevado nível de imunidade a ESD e outros fenómenos de distúrbio;
• Baixa capacidade de saída;
• Baixos níveis de picos de corrente na alimentação.
2.5. Conclusão
Neste capítulo começamos por abordar o assunto relativo ao acoplamento electromagnético.
De seguida, descrevemos os tipos de acoplamento, quer por modo capacitivo quer por modo indutivo.
No terceiro ponto, falamos sobre os tipos de perturbações e qual a sua
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 27
origem. Falamos sobre as fontes de ruído electromagnético, depois sobre os meios de acoplamento, quer por modo diferencial, modo comum, modo antena ou impedância comum e por fim falamos sobre os receptores de ruído (vitimas das interferências electromagnéticas) e formas de protecção destes contra as perturbações electromagnéticas.
No quarto ponto falamos sobre as formas de atenuação do ruído electromagnético e técnicas utilizadas. Foi mostrado como devem ser efectuadas as ligações das blindagens à terra, de forma a atenuar o mais possível os efeitos indesejáveis das interferências, utilizando esquemas de ligação adequados a diversas situações.
No ponto dois falamos sobre os toros de ferrite, que são componentes que permitem de uma forma rápida, atenuar os efeitos por radiação.
No ponto três falamos sobre os filtros EMI/RFI, que são muito utilizados e qualquer fabricante pode comprar e colocar no seu equipamento, de forma a cumprir as directivas existentes.
No ponto quatro, falamos sobre as formas de concepção, durante o desenvolvimento do sistema em placa de circuito impresso, de modo a tornar esse sistema o mais imune possível ao ruído e a não perturbar outros equipamentos.
Por fim, no último ponto abordamos os cuidados necessários a ter na escolha dos circuitos integrados, que depois em conjunto com outros componentes completam o sistema desenvolvido.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 28
Capítulo 3
Concepção e desenvolvimento do sistema para condução avançada do
motor de indução trifásico
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 29
3. Concepção e desenvolvimento do sistema para condução avançada do motor de indução trifásico
3.1. Descrição do sistema
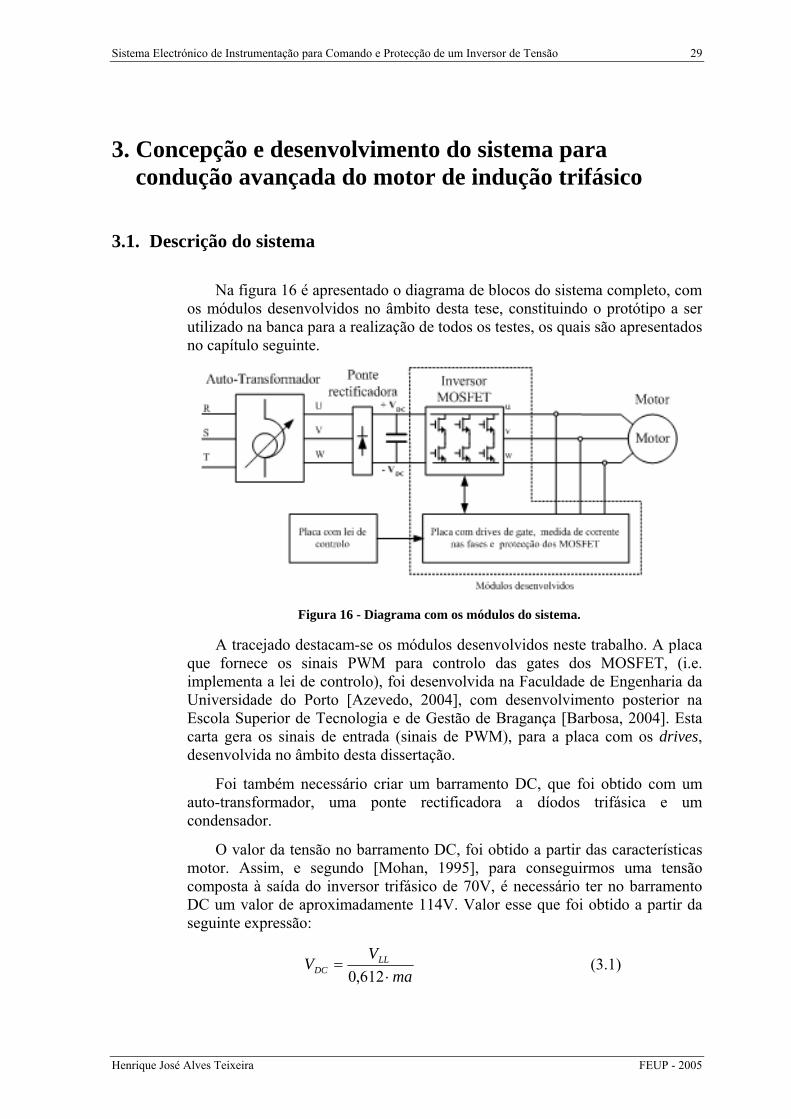
Na figura 16 é apresentado o diagrama de blocos do sistema completo, com os módulos desenvolvidos no âmbito desta tese, constituindo o protótipo a ser utilizado na banca para a realização de todos os testes, os quais são apresentados no capítulo seguinte.
Figura 16 - Diagrama com os módulos do sistema.
A tracejado destacam-se os módulos desenvolvidos neste trabalho. A placa que fornece os sinais PWM para controlo das gates dos MOSFET, (i.e. implementa a lei de controlo), foi desenvolvida na Faculdade de Engenharia da Universidade do Porto [Azevedo, 2004], com desenvolvimento posterior na Escola Superior de Tecnologia e de Gestão de Bragança [Barbosa, 2004]. Esta carta gera os sinais de entrada (sinais de PWM), para a placa com os drives, desenvolvida no âmbito desta dissertação.
Foi também necessário criar um barramento DC, que foi obtido com um auto-transformador, uma ponte rectificadora a díodos trifásica e um condensador.
O valor da tensão no barramento DC, foi obtido a partir das características motor. Assim, e segundo [Mohan, 1995], para conseguirmos uma tensão composta à saída do inversor trifásico de 70V, é necessário ter no barramento DC um valor de aproximadamente 114V. Valor esse que foi obtido a partir da seguinte expressão:
maV
V LLDC ⋅
=612,0
(3.1)
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 30
Onde,
• VLL é o valor da tensão composta da componente fundamental à saída do inversor;
• ma é o índice de modulação.
Assim, e considerando o índice de modulação ma = 1, obtemos:
VVDC 1141612,0
70≅
⋅= (3.2)
Além da ponte rectificadora a díodos, foi também colocado um no barramento DC, que permite obter à entrada do inversor uma tensão menos ondulada em relação à obtida à saída da ponte rectificadora. O seu valor foi calculado com recurso à seguinte fórmula:
RVfédC⋅⋅
=2
Im (3.3)
Onde,
• Iméd, é o valor médio da corrente;
• VR, é o valor do ripple na tensão.
Assim, e para um ripple de 5%, que nós consideramos aceitável para a distorção provocada na geração da forma de onda fornecida ao motor, obtemos:
mFC 68,47,53002
16=
⋅⋅= (3.4)
O valor de 114V no barramento DC, foi obtido regulando o auto-transformador, e medindo o valor da tensão no barramento até atingir esse valor.
Na figura 17, é apresentado o diagrama de blocos do módulo que permite efectuar a protecção contra sobre-intensidades e medição da corrente nas fases.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 31
Figura 17 - Diagrama de blocos do módulo de protecção.
Este módulo é constituído por diversos blocos, sendo o bloco “Sensor de corrente DC” (resistência de baixo valor óhmico), aquele que permite efectuar a medição da corrente no barramento DC, para detecção da ocorrência de uma curto-circuito. Esse valor da corrente é monitorizado pelo bloco “Detector limite de corrente” (circuito integrado HCPL 2611), que permite, quando esta atinge um valor definido como limite, suficiente para ser considerado uma sobre-intensidade, activar um sinal de falha. Esse sinal de falha é enviado ao bloco de “Memória e sinalização” (circuito integrado 74LS279), bloco este que permite guardar a ocorrência da falha em memória, sinalizar através de um led e enviar um sinal inibidor ao bloco de “buffer e controlo dos sinais de gate” (circuito integrado 74LS366).
Do lado da alimentação ao motor, temos o bloco “Sensor de corrente fases” (resistências de baixo valor óhmico), que permite medir a corrente em cada fase da alimentação do motor. Este valor da corrente é adquirido pelo bloco “Detector e medidor de corrente” (circuito integrado HCPL 788J), o qual permite, além da medida de corrente, a detecção da ocorrência de uma sobrecarga ou curto-circuito, e envia um sinal de falha ao bloco de “Memória e sinalização”.
O sinal enviado pelo bloco de memória e sinalização para o bloco de buffer e controlo dos sinais de gate, permite inibir este último parando a passagem dos sinais de PWM que vão para o bloco de drive.
Na figura 18, está representada parte do circuito eléctrico descrito neste diagrama de blocos (o circuito completo implementado é apresentado no anexo C) sendo posteriormente detalhado cada um desses blocos em termos de esquema eléctrico.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 32
Figura 18 - Circuito para efectuar a protecção do sistema contra sobre-intensidades no barramento DC.
Embora na presente dissertação o inversor não seja o centro da atenção dedicada, é ainda um elemento central. Seguiu-se no seu desenho uma arquitectura versátil para não limitar o controlo avançado que se tem em vista e empregaram-se interruptores eficientes da tecnologia HEXFET de 5ª geração. Esta arquitectura permite futuramente um funcionamento em 4 quadrantes essencial para um accionamento electromecânico moderno e eficiente. É possível desta forma realizar a frenagem regenerativa.
O inversor proposto foi implementado com semicondutores do tipo MOSFET, tendo sido escolhidos os MOSFET IRFP260N da International Rectifier, os quais possuem as características a seguir descritas:
• Tensão Dreno-Source VDS = 200V;
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 33
• Resistência de condução RDS(on) = 0.04Ω;
• Corrente de condução ID = 50A;
• Tempo de entrada em condução td(on) = 17ns;
• Tempo de subida tr = 60ns;
• Tempo de saída de condução td(off) = 55ns;
• Tempo de descida tf = 48ns.
Os MOSFET foram escolhidos tendo em consideração a carga a alimentar, isto é, o motor que pretendíamos controlar, o qual é um motor de indução trifásico, com uma tensão de alimentação de 70V e uma corrente nominal de 16A. Não foi necessário recorrer ao sobredimensionamento dos MOSFET, pelo facto da lei de controlo utilizada impor rampas de aceleração e rampas de desaceleração, o que limita o crescimento da corrente, quer nos arranques quer nas frenagens. A escolha destes MOSFET, além das suas características, deveu-se também à disponibilidade da sua aquisição. Obviamente que muitos outros modelos de MOSFET poderiam ter sido utilizados.
Para o controlo destes MOSFET foram utilizados circuitos integrados que permitem controlar o sinal de gate, nomeadamente o circuito integrado HCPL314J da Agilent Technologies, que é um “MOSFET Gate drive optocoupler”, com as características a seguir enumeradas:
• Corrente de gate fornecida mínima de 0,4mA;
• Pequeno tempo de resposta: 0,7µs Max.;
• Isolamento óptico;
• Corrente de alimentação: 3mA Max.;
• Elevada rejeição em modo comum: Mínimo de 10KV/µs para VCM=1.5kV;
• Possibilidade de controlo independente de 2 MOSFET, em simultâneo.
Os circuitos integrados HCPL 314J possuem a particularidade de permitir o isolamento óptico entre a parte de potência e a parte de sinal. Além disso a escolha deste integrado foi feita pelo facto de pretendermos desenvolver um circuito com o intuito de ser baixo custo. Na figura 19 é apresentado o esquema simplificado deste integrado.
Henrique José Alves Teixeira FEUP - 2005
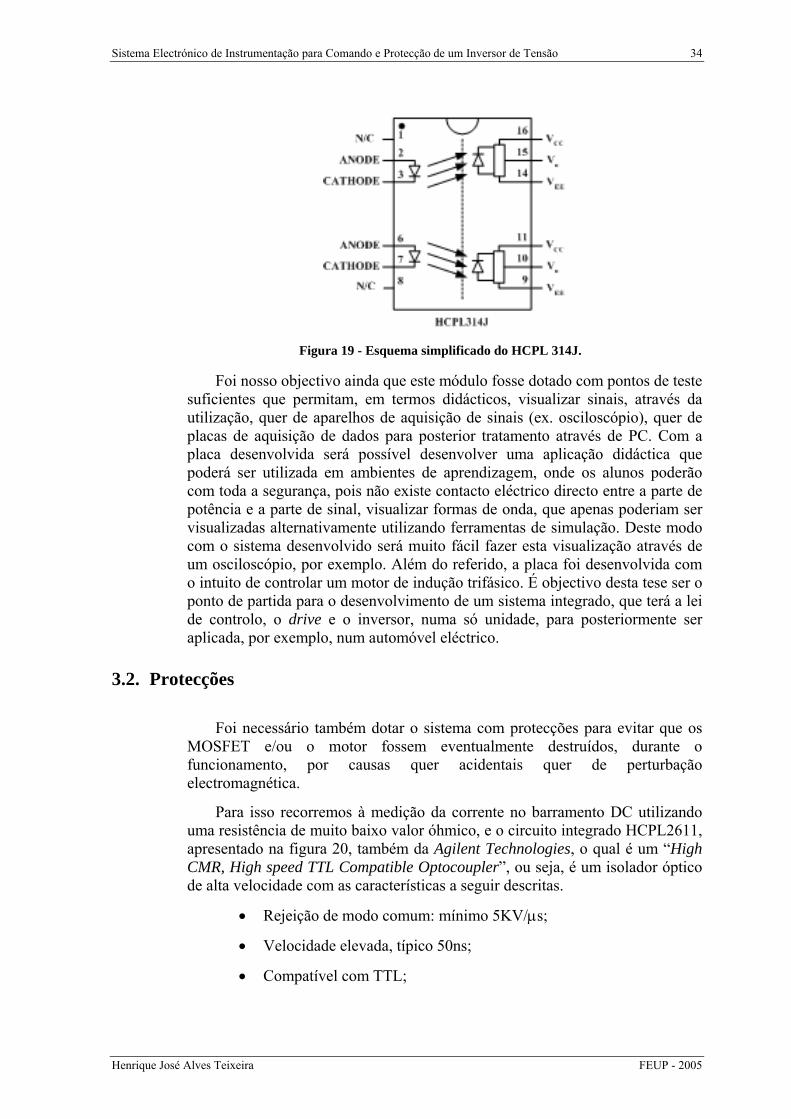
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 34
Figura 19 - Esquema simplificado do HCPL 314J.
Foi nosso objectivo ainda que este módulo fosse dotado com pontos de teste suficientes que permitam, em termos didácticos, visualizar sinais, através da utilização, quer de aparelhos de aquisição de sinais (ex. osciloscópio), quer de placas de aquisição de dados para posterior tratamento através de PC. Com a placa desenvolvida será possível desenvolver uma aplicação didáctica que poderá ser utilizada em ambientes de aprendizagem, onde os alunos poderão com toda a segurança, pois não existe contacto eléctrico directo entre a parte de potência e a parte de sinal, visualizar formas de onda, que apenas poderiam ser visualizadas alternativamente utilizando ferramentas de simulação. Deste modo com o sistema desenvolvido será muito fácil fazer esta visualização através de um osciloscópio, por exemplo. Além do referido, a placa foi desenvolvida com o intuito de controlar um motor de indução trifásico. É objectivo desta tese ser o ponto de partida para o desenvolvimento de um sistema integrado, que terá a lei de controlo, o drive e o inversor, numa só unidade, para posteriormente ser aplicada, por exemplo, num automóvel eléctrico.
3.2. Protecções
Foi necessário também dotar o sistema com protecções para evitar que os MOSFET e/ou o motor fossem eventualmente destruídos, durante o funcionamento, por causas quer acidentais quer de perturbação electromagnética.
Para isso recorremos à medição da corrente no barramento DC utilizando uma resistência de muito baixo valor óhmico, e o circuito integrado HCPL2611, apresentado na figura 20, também da Agilent Technologies, o qual é um “High CMR, High speed TTL Compatible Optocoupler”, ou seja, é um isolador óptico de alta velocidade com as características a seguir descritas.
• Rejeição de modo comum: mínimo 5KV/µs;
• Velocidade elevada, típico 50ns;
• Compatível com TTL;
Henrique José Alves Teixeira FEUP - 2005
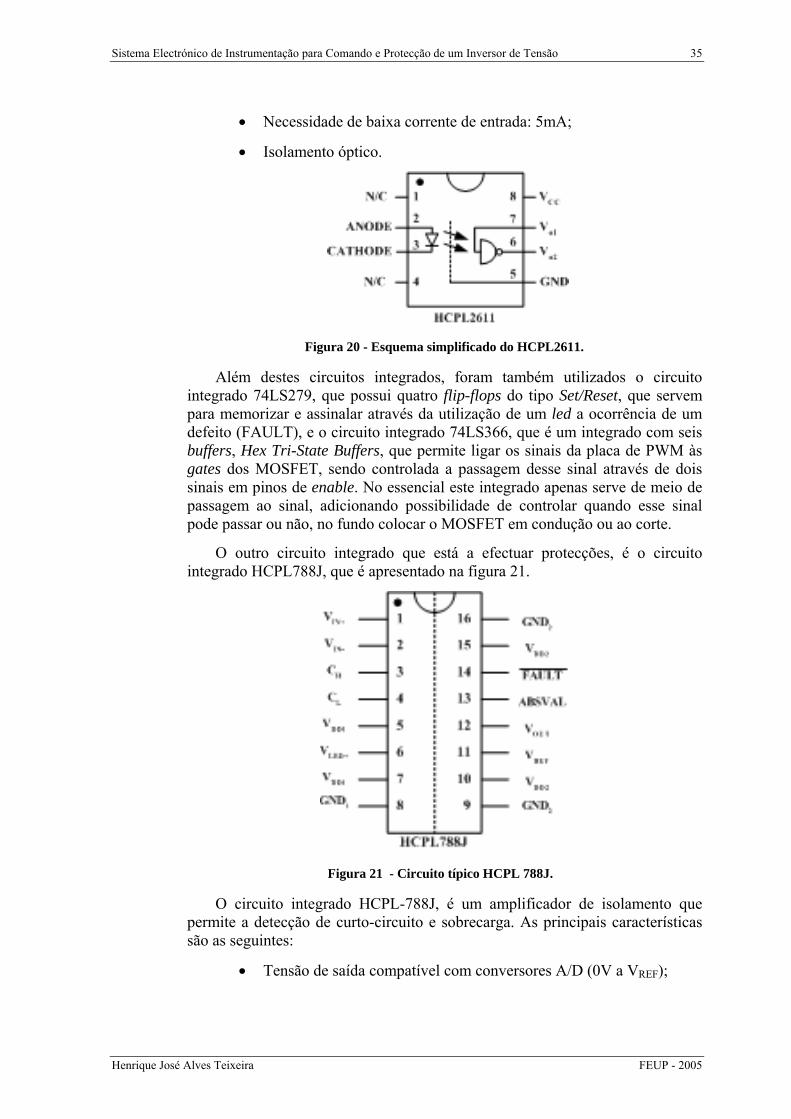
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 35
• Necessidade de baixa corrente de entrada: 5mA;
• Isolamento óptico.
Figura 20 - Esquema simplificado do HCPL2611.
Além destes circuitos integrados, foram também utilizados o circuito integrado 74LS279, que possui quatro flip-flops do tipo Set/Reset, que servem para memorizar e assinalar através da utilização de um led a ocorrência de um defeito (FAULT), e o circuito integrado 74LS366, que é um integrado com seis buffers, Hex Tri-State Buffers, que permite ligar os sinais da placa de PWM às gates dos MOSFET, sendo controlada a passagem desse sinal através de dois sinais em pinos de enable. No essencial este integrado apenas serve de meio de passagem ao sinal, adicionando possibilidade de controlar quando esse sinal pode passar ou não, no fundo colocar o MOSFET em condução ou ao corte.
O outro circuito integrado que está a efectuar protecções, é o circuito integrado HCPL788J, que é apresentado na figura 21.
Figura 21 - Circuito típico HCPL 788J.
O circuito integrado HCPL-788J, é um amplificador de isolamento que permite a detecção de curto-circuito e sobrecarga. As principais características são as seguintes:
• Tensão de saída compatível com conversores A/D (0V a VREF);
Henrique José Alves Teixeira FEUP - 2005
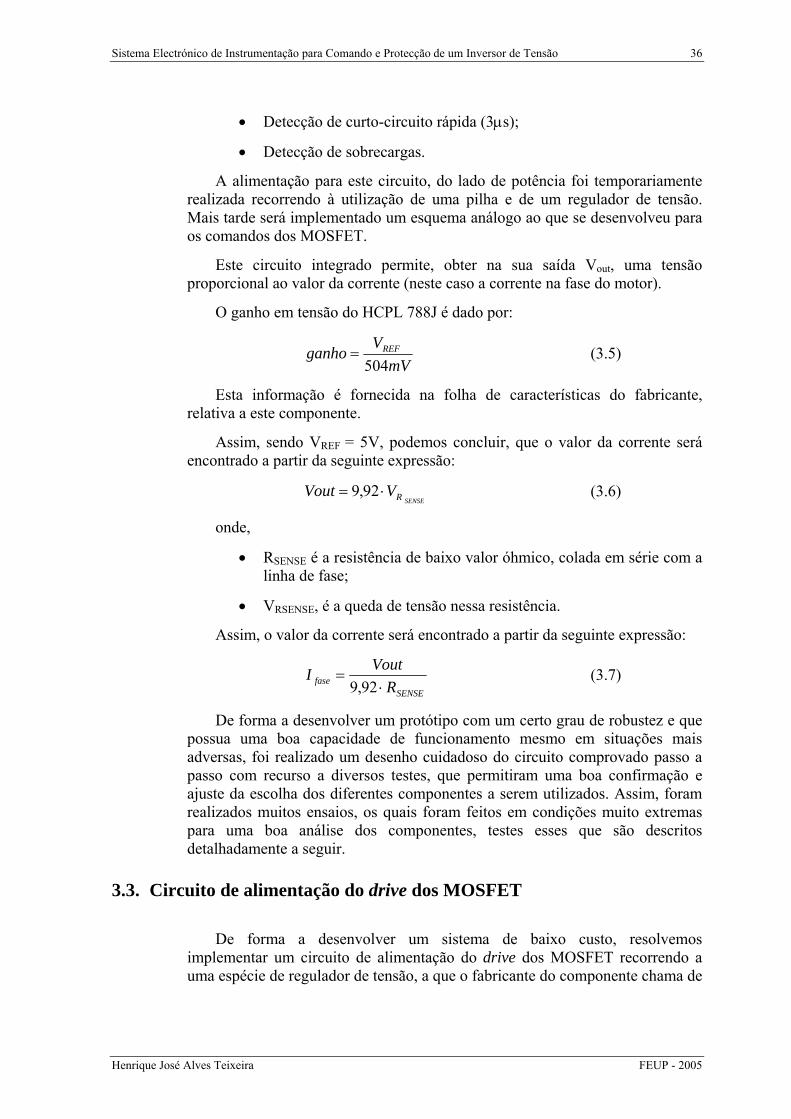
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 36
• Detecção de curto-circuito rápida (3µs);
• Detecção de sobrecargas.
A alimentação para este circuito, do lado de potência foi temporariamente realizada recorrendo à utilização de uma pilha e de um regulador de tensão. Mais tarde será implementado um esquema análogo ao que se desenvolveu para os comandos dos MOSFET.
Este circuito integrado permite, obter na sua saída Vout, uma tensão proporcional ao valor da corrente (neste caso a corrente na fase do motor).
O ganho em tensão do HCPL 788J é dado por:
mVVganho REF
504= (3.5)
Esta informação é fornecida na folha de características do fabricante, relativa a este componente.
Assim, sendo VREF = 5V, podemos concluir, que o valor da corrente será encontrado a partir da seguinte expressão:
SENSERVVout ⋅= 92,9 (3.6)
onde,
• RSENSE é a resistência de baixo valor óhmico, colada em série com a linha de fase;
• VRSENSE, é a queda de tensão nessa resistência.
Assim, o valor da corrente será encontrado a partir da seguinte expressão:
SENSEfase R
VoutI⋅
=92,9
(3.7)
De forma a desenvolver um protótipo com um certo grau de robustez e que possua uma boa capacidade de funcionamento mesmo em situações mais adversas, foi realizado um desenho cuidadoso do circuito comprovado passo a passo com recurso a diversos testes, que permitiram uma boa confirmação e ajuste da escolha dos diferentes componentes a serem utilizados. Assim, foram realizados muitos ensaios, os quais foram feitos em condições muito extremas para uma boa análise dos componentes, testes esses que são descritos detalhadamente a seguir.
3.3. Circuito de alimentação do drive dos MOSFET
De forma a desenvolver um sistema de baixo custo, resolvemos implementar um circuito de alimentação do drive dos MOSFET recorrendo a uma espécie de regulador de tensão, a que o fabricante do componente chama de
Henrique José Alves Teixeira FEUP - 2005
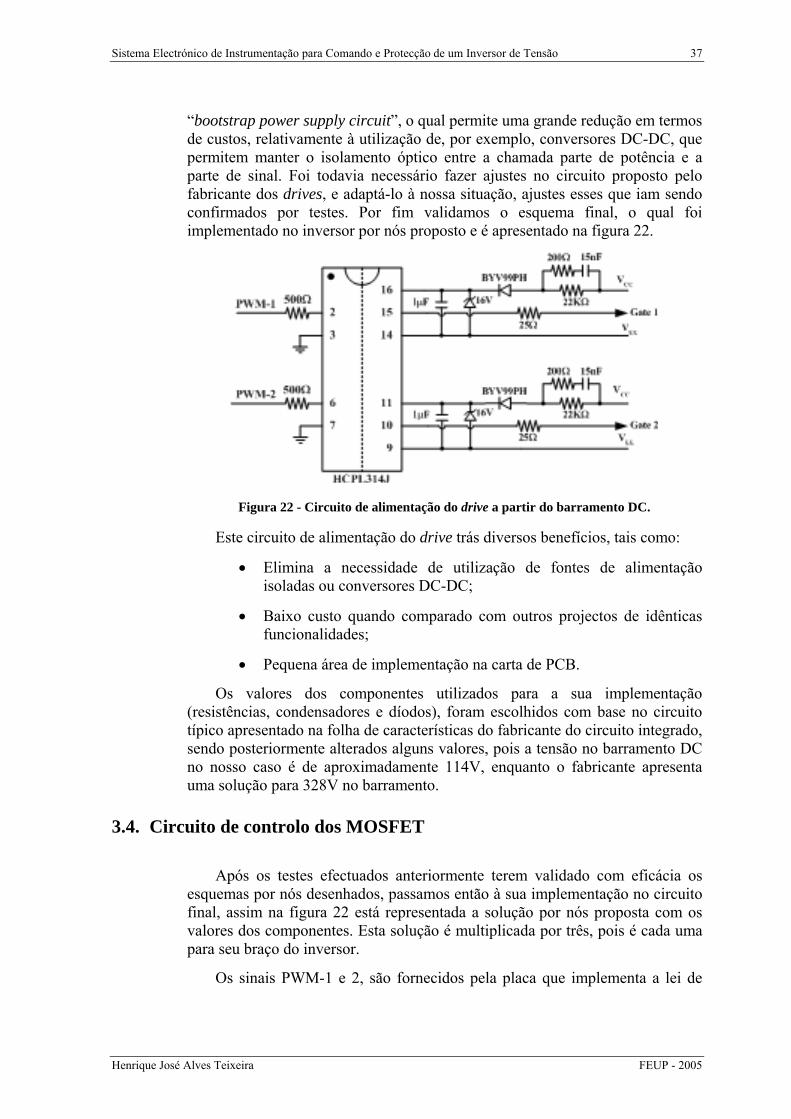
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 37
“bootstrap power supply circuit”, o qual permite uma grande redução em termos de custos, relativamente à utilização de, por exemplo, conversores DC-DC, que permitem manter o isolamento óptico entre a chamada parte de potência e a parte de sinal. Foi todavia necessário fazer ajustes no circuito proposto pelo fabricante dos drives, e adaptá-lo à nossa situação, ajustes esses que iam sendo confirmados por testes. Por fim validamos o esquema final, o qual foi implementado no inversor por nós proposto e é apresentado na figura 22.
Figura 22 - Circuito de alimentação do drive a partir do barramento DC.
Este circuito de alimentação do drive trás diversos benefícios, tais como:
• Elimina a necessidade de utilização de fontes de alimentação isoladas ou conversores DC-DC;
• Baixo custo quando comparado com outros projectos de idênticas funcionalidades;
• Pequena área de implementação na carta de PCB.
Os valores dos componentes utilizados para a sua implementação (resistências, condensadores e díodos), foram escolhidos com base no circuito típico apresentado na folha de características do fabricante do circuito integrado, sendo posteriormente alterados alguns valores, pois a tensão no barramento DC no nosso caso é de aproximadamente 114V, enquanto o fabricante apresenta uma solução para 328V no barramento.
3.4. Circuito de controlo dos MOSFET
Após os testes efectuados anteriormente terem validado com eficácia os esquemas por nós desenhados, passamos então à sua implementação no circuito final, assim na figura 22 está representada a solução por nós proposta com os valores dos componentes. Esta solução é multiplicada por três, pois é cada uma para seu braço do inversor.
Os sinais PWM-1 e 2, são fornecidos pela placa que implementa a lei de
Henrique José Alves Teixeira FEUP - 2005
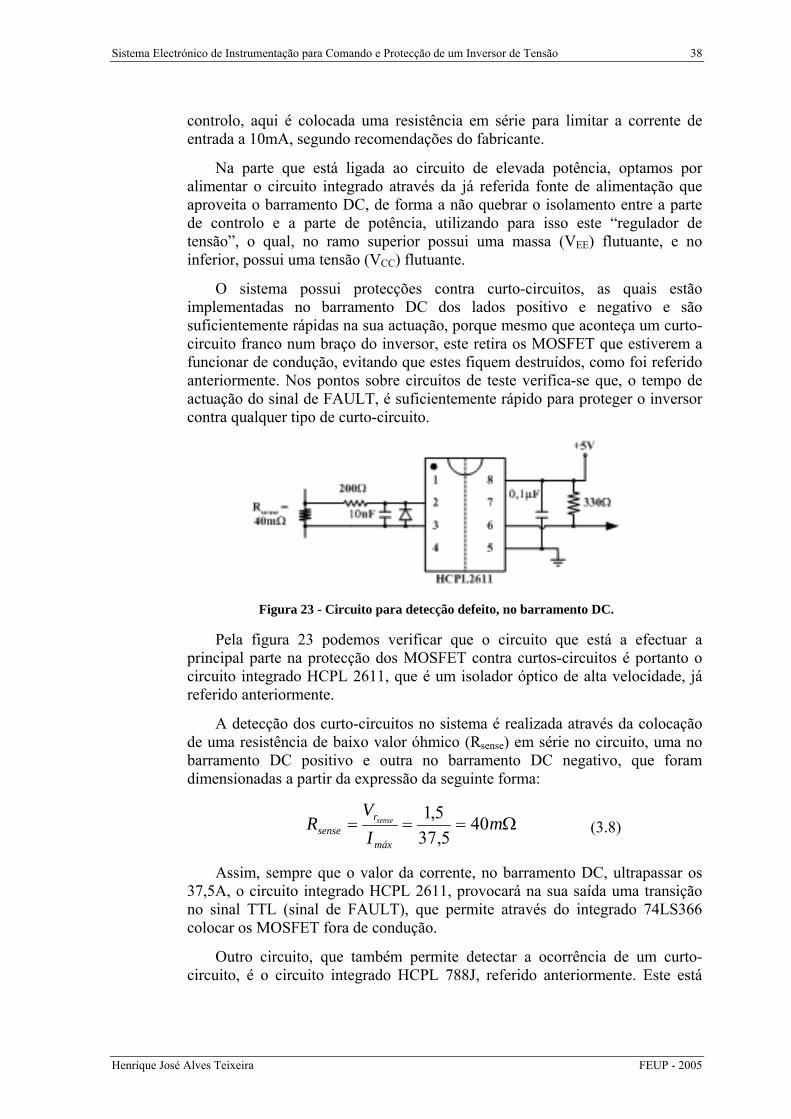
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 38
controlo, aqui é colocada uma resistência em série para limitar a corrente de entrada a 10mA, segundo recomendações do fabricante.
Na parte que está ligada ao circuito de elevada potência, optamos por alimentar o circuito integrado através da já referida fonte de alimentação que aproveita o barramento DC, de forma a não quebrar o isolamento entre a parte de controlo e a parte de potência, utilizando para isso este “regulador de tensão”, o qual, no ramo superior possui uma massa (VEE) flutuante, e no inferior, possui uma tensão (VCC) flutuante.
O sistema possui protecções contra curto-circuitos, as quais estão implementadas no barramento DC dos lados positivo e negativo e são suficientemente rápidas na sua actuação, porque mesmo que aconteça um curto-circuito franco num braço do inversor, este retira os MOSFET que estiverem a funcionar de condução, evitando que estes fiquem destruídos, como foi referido anteriormente. Nos pontos sobre circuitos de teste verifica-se que, o tempo de actuação do sinal de FAULT, é suficientemente rápido para proteger o inversor contra qualquer tipo de curto-circuito.
Figura 23 - Circuito para detecção defeito, no barramento DC.
Pela figura 23 podemos verificar que o circuito que está a efectuar a principal parte na protecção dos MOSFET contra curtos-circuitos é portanto o circuito integrado HCPL 2611, que é um isolador óptico de alta velocidade, já referido anteriormente.
A detecção dos curto-circuitos no sistema é realizada através da colocação de uma resistência de baixo valor óhmico (Rsense) em série no circuito, uma no barramento DC positivo e outra no barramento DC negativo, que foram dimensionadas a partir da expressão da seguinte forma:
Ω=== mIV
Rmáx
rsense
sense 405,37
5,1 (3.8)
Assim, sempre que o valor da corrente, no barramento DC, ultrapassar os 37,5A, o circuito integrado HCPL 2611, provocará na sua saída uma transição no sinal TTL (sinal de FAULT), que permite através do integrado 74LS366 colocar os MOSFET fora de condução.
Outro circuito, que também permite detectar a ocorrência de um curto-circuito, é o circuito integrado HCPL 788J, referido anteriormente. Este está
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 39
calibrado de forma que se a corrente na fase, ultrapassar os 51A, provocará na sua saída de FAULT uma transição no sinal (5V a 0V), o que permite, através do integrado 74LS279 sinalizar a ocorrência de um defeito, que por sua vez, através do integrado 74LS366 coloca os MOSFET fora de condução.
Figura 24 - Circuito para detecção de defeito, numa fase.
Assim, na figura 24 é apresentado o circuito utilizado que permite detectar a ocorrência de um curto-circuito, através da monitorização da corrente numa das fases que alimenta o motor, à saída do inversor.
Este circuito é mais lento do que o apresentado anteriormente, o que significa que só actua no caso do circuito anterior (HCPL 2611) estar com algum defeito e no caso específico do defeito ou sobrecarga se verificar numa das linhas de fase.
O circuito integrado que permite realizar a sinalização e memória da ocorrência de um defeito é o apresentado na figura seguinte.
Figura 25 - Circuito para sinalização e memorização de um defeito.
O circuito integrado utilizado no sistema que permite aos MOSFET entrar e sair de condução quando ocorre um defeito (sinal enviado pelo circuito da figura 25), é o apresentado na figura 26, pois este circuito serve para permitir ou inibir
Henrique José Alves Teixeira FEUP - 2005
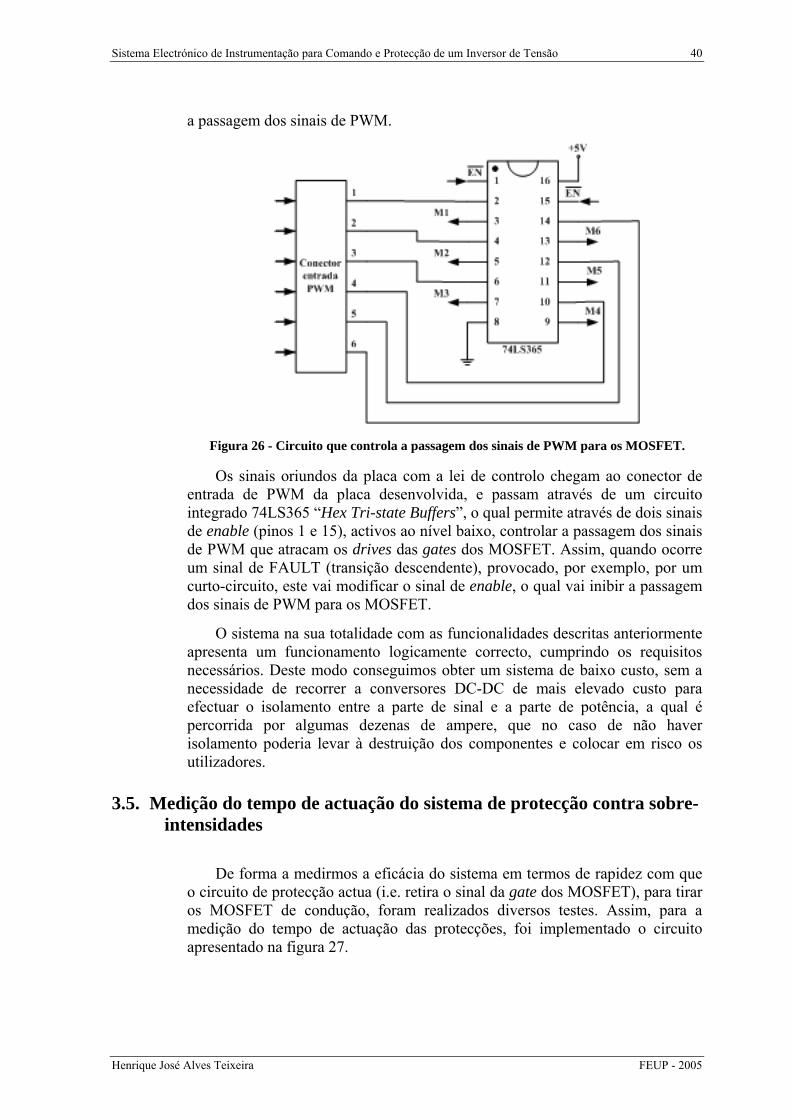
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 40
a passagem dos sinais de PWM.
Figura 26 - Circuito que controla a passagem dos sinais de PWM para os MOSFET.
Os sinais oriundos da placa com a lei de controlo chegam ao conector de entrada de PWM da placa desenvolvida, e passam através de um circuito integrado 74LS365 “Hex Tri-state Buffers”, o qual permite através de dois sinais de enable (pinos 1 e 15), activos ao nível baixo, controlar a passagem dos sinais de PWM que atracam os drives das gates dos MOSFET. Assim, quando ocorre um sinal de FAULT (transição descendente), provocado, por exemplo, por um curto-circuito, este vai modificar o sinal de enable, o qual vai inibir a passagem dos sinais de PWM para os MOSFET.
O sistema na sua totalidade com as funcionalidades descritas anteriormente apresenta um funcionamento logicamente correcto, cumprindo os requisitos necessários. Deste modo conseguimos obter um sistema de baixo custo, sem a necessidade de recorrer a conversores DC-DC de mais elevado custo para efectuar o isolamento entre a parte de sinal e a parte de potência, a qual é percorrida por algumas dezenas de ampere, que no caso de não haver isolamento poderia levar à destruição dos componentes e colocar em risco os utilizadores.
3.5. Medição do tempo de actuação do sistema de protecção contra sobre-intensidades
De forma a medirmos a eficácia do sistema em termos de rapidez com que o circuito de protecção actua (i.e. retira o sinal da gate dos MOSFET), para tirar os MOSFET de condução, foram realizados diversos testes. Assim, para a medição do tempo de actuação das protecções, foi implementado o circuito apresentado na figura 27.
Henrique José Alves Teixeira FEUP - 2005
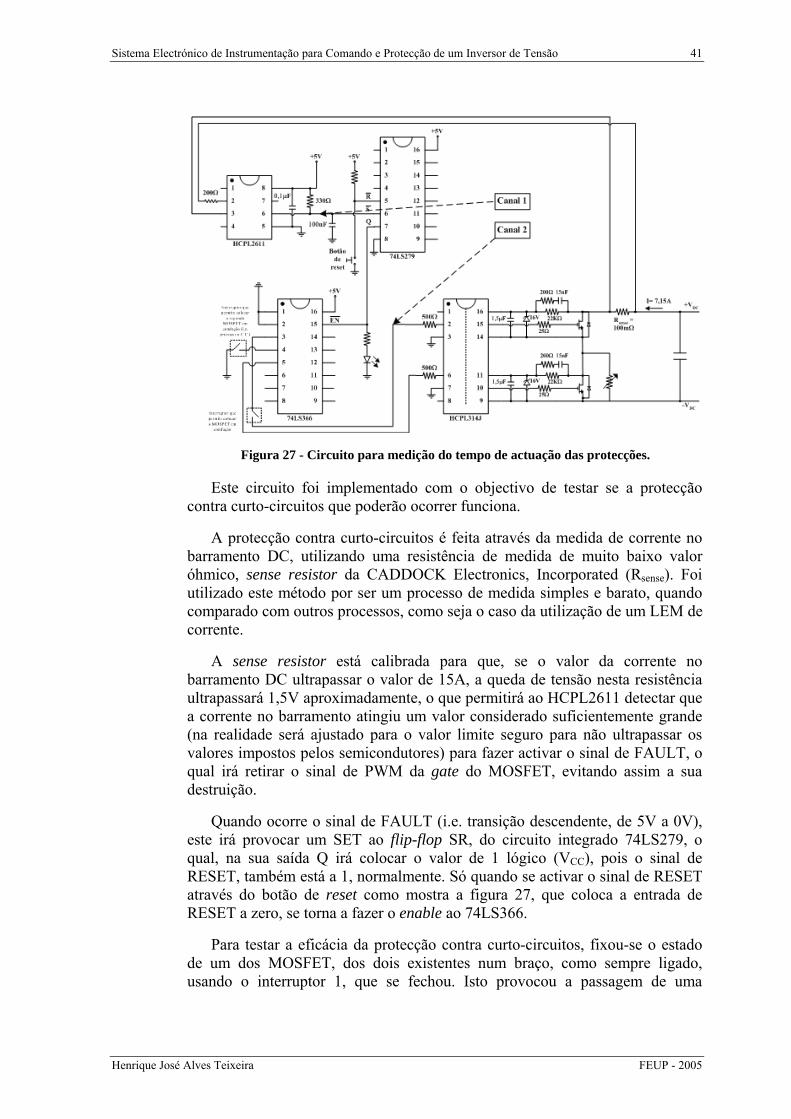
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 41
Figura 27 - Circuito para medição do tempo de actuação das protecções.
Este circuito foi implementado com o objectivo de testar se a protecção contra curto-circuitos que poderão ocorrer funciona.
A protecção contra curto-circuitos é feita através da medida de corrente no barramento DC, utilizando uma resistência de medida de muito baixo valor óhmico, sense resistor da CADDOCK Electronics, Incorporated (Rsense). Foi utilizado este método por ser um processo de medida simples e barato, quando comparado com outros processos, como seja o caso da utilização de um LEM de corrente.
A sense resistor está calibrada para que, se o valor da corrente no barramento DC ultrapassar o valor de 15A, a queda de tensão nesta resistência ultrapassará 1,5V aproximadamente, o que permitirá ao HCPL2611 detectar que a corrente no barramento atingiu um valor considerado suficientemente grande (na realidade será ajustado para o valor limite seguro para não ultrapassar os valores impostos pelos semicondutores) para fazer activar o sinal de FAULT, o qual irá retirar o sinal de PWM da gate do MOSFET, evitando assim a sua destruição.
Quando ocorre o sinal de FAULT (i.e. transição descendente, de 5V a 0V), este irá provocar um SET ao flip-flop SR, do circuito integrado 74LS279, o qual, na sua saída Q irá colocar o valor de 1 lógico (VCC), pois o sinal de RESET, também está a 1, normalmente. Só quando se activar o sinal de RESET através do botão de reset como mostra a figura 27, que coloca a entrada de RESET a zero, se torna a fazer o enable ao 74LS366.
Para testar a eficácia da protecção contra curto-circuitos, fixou-se o estado de um dos MOSFET, dos dois existentes num braço, como sempre ligado, usando o interruptor 1, que se fechou. Isto provocou a passagem de uma
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 42
corrente pelo MOSFET superior e pela resistência que está em paralelo com o MOSFET inferior, como mostra a figura 27, a servir de carga. Depois ligou-se o outro MOSFET, através do interruptor 2, sempre que se pretendeu provocar um curto-circuito. Quando o curto-circuito ocorria os dois MOSFET ficavam ON e assim o barramento ficava curto-circuitado através deles até à intervenção do circuito de FAULT acima descrito, no sentido de se fazer SET ao flip-flop.
O circuito de drive aos MOSFET é o HCPL314J, atrás descrito, o qual permite controlar os dois MOSFET do mesmo braço. Este circuito tem a particularidade de possuir isolamento galvânico, o qual permite isolar a parte de comando do circuito da parte de potência.
Para ser mais fácil visualizar a ocorrência de um curto-circuito, foi utilizado um led, o qual quando ligado indica a ocorrência de uma falha.
3.5.1.Tempo que demora a anular o sinal de comando de gate
Um dos testes realizados foi a medição do tempo que demora desde que ocorreu o sinal de FAULT à saída do HCPL2611, até que desaparece o sinal de PWM à entrada do HCPL314J. Foi utilizado para isso um osciloscópio digital no modo de aquisição. Assim, com o canal 1 à saída do HCPL2611, no qual, quando na sua entrada aparecia uma queda de tensão de aproximadamente 1,5V (i.e. a resistência RSENSE estava a ser percorrida por uma corrente de 15A), produzia o sinal de FAULT, que, por sua vez, ia provocar o retirar os sinais de entrada dos MOSFET, e com o canal 2 à entrada do HCPL314J, adquiriram-se as formas de onda.
Na figura 27 está apresentado o esquema com a localização exacta de onde foram colocadas as pontas do osciloscópio, o que permite compreender melhor como foi realizado este teste. Assim, foram obtidas as formas de onda apresentadas nas figuras 28 e 29.
Henrique José Alves Teixeira FEUP - 2005
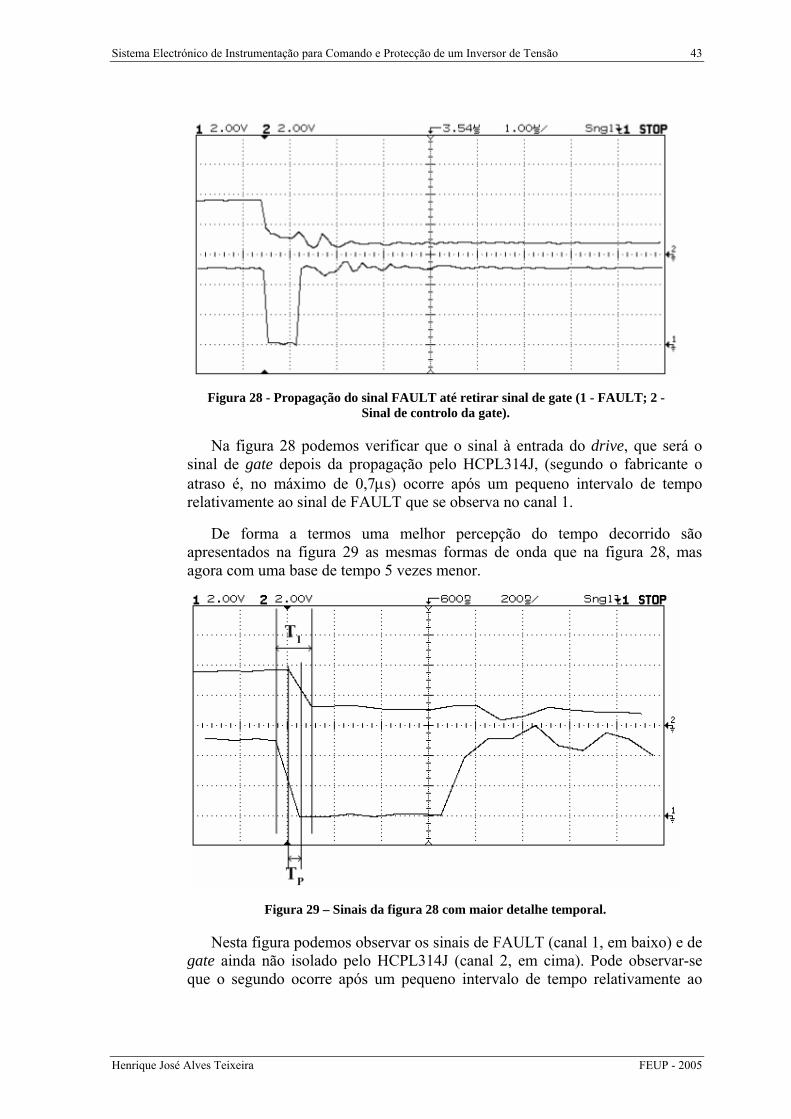
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 43
Figura 28 - Propagação do sinal FAULT até retirar sinal de gate (1 - FAULT; 2 - Sinal de controlo da gate).
Na figura 28 podemos verificar que o sinal à entrada do drive, que será o sinal de gate depois da propagação pelo HCPL314J, (segundo o fabricante o atraso é, no máximo de 0,7µs) ocorre após um pequeno intervalo de tempo relativamente ao sinal de FAULT que se observa no canal 1.
De forma a termos uma melhor percepção do tempo decorrido são apresentados na figura 29 as mesmas formas de onda que na figura 28, mas agora com uma base de tempo 5 vezes menor.
Figura 29 – Sinais da figura 28 com maior detalhe temporal.
Nesta figura podemos observar os sinais de FAULT (canal 1, em baixo) e de gate ainda não isolado pelo HCPL314J (canal 2, em cima). Pode observar-se que o segundo ocorre após um pequeno intervalo de tempo relativamente ao
Henrique José Alves Teixeira FEUP - 2005
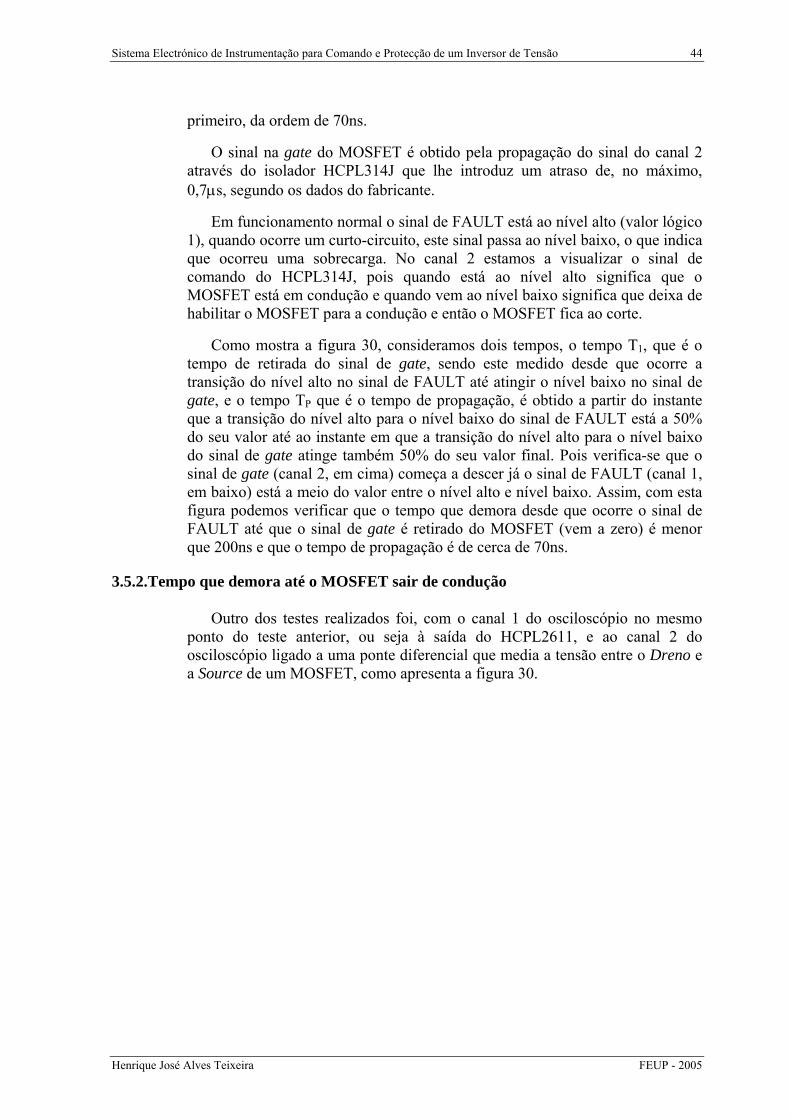
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 44
primeiro, da ordem de 70ns.
O sinal na gate do MOSFET é obtido pela propagação do sinal do canal 2 através do isolador HCPL314J que lhe introduz um atraso de, no máximo, 0,7µs, segundo os dados do fabricante.
Em funcionamento normal o sinal de FAULT está ao nível alto (valor lógico 1), quando ocorre um curto-circuito, este sinal passa ao nível baixo, o que indica que ocorreu uma sobrecarga. No canal 2 estamos a visualizar o sinal de comando do HCPL314J, pois quando está ao nível alto significa que o MOSFET está em condução e quando vem ao nível baixo significa que deixa de habilitar o MOSFET para a condução e então o MOSFET fica ao corte.
Como mostra a figura 30, consideramos dois tempos, o tempo T1, que é o tempo de retirada do sinal de gate, sendo este medido desde que ocorre a transição do nível alto no sinal de FAULT até atingir o nível baixo no sinal de gate, e o tempo TP que é o tempo de propagação, é obtido a partir do instante que a transição do nível alto para o nível baixo do sinal de FAULT está a 50% do seu valor até ao instante em que a transição do nível alto para o nível baixo do sinal de gate atinge também 50% do seu valor final. Pois verifica-se que o sinal de gate (canal 2, em cima) começa a descer já o sinal de FAULT (canal 1, em baixo) está a meio do valor entre o nível alto e nível baixo. Assim, com esta figura podemos verificar que o tempo que demora desde que ocorre o sinal de FAULT até que o sinal de gate é retirado do MOSFET (vem a zero) é menor que 200ns e que o tempo de propagação é de cerca de 70ns.
3.5.2.Tempo que demora até o MOSFET sair de condução
Outro dos testes realizados foi, com o canal 1 do osciloscópio no mesmo ponto do teste anterior, ou seja à saída do HCPL2611, e ao canal 2 do osciloscópio ligado a uma ponte diferencial que media a tensão entre o Dreno e a Source de um MOSFET, como apresenta a figura 30.
Henrique José Alves Teixeira FEUP - 2005
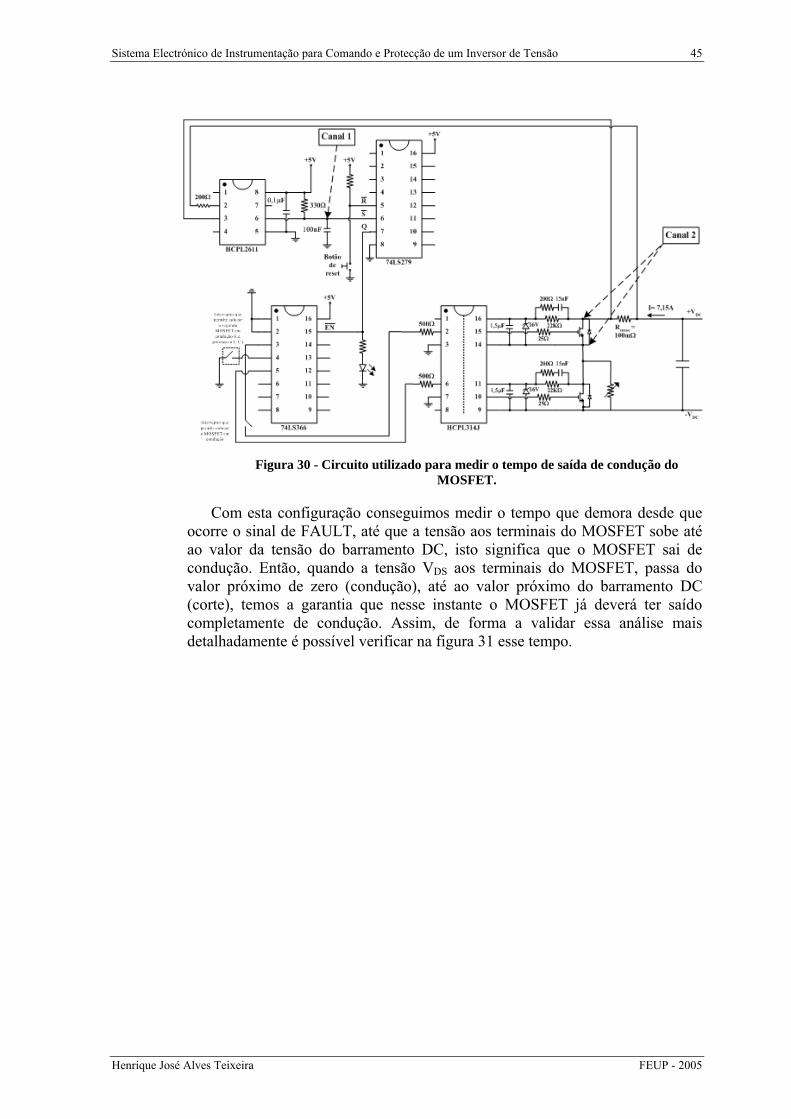
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 45
Figura 30 - Circuito utilizado para medir o tempo de saída de condução do MOSFET.
Com esta configuração conseguimos medir o tempo que demora desde que ocorre o sinal de FAULT, até que a tensão aos terminais do MOSFET sobe até ao valor da tensão do barramento DC, isto significa que o MOSFET sai de condução. Então, quando a tensão VDS aos terminais do MOSFET, passa do valor próximo de zero (condução), até ao valor próximo do barramento DC (corte), temos a garantia que nesse instante o MOSFET já deverá ter saído completamente de condução. Assim, de forma a validar essa análise mais detalhadamente é possível verificar na figura 31 esse tempo.
Henrique José Alves Teixeira FEUP - 2005
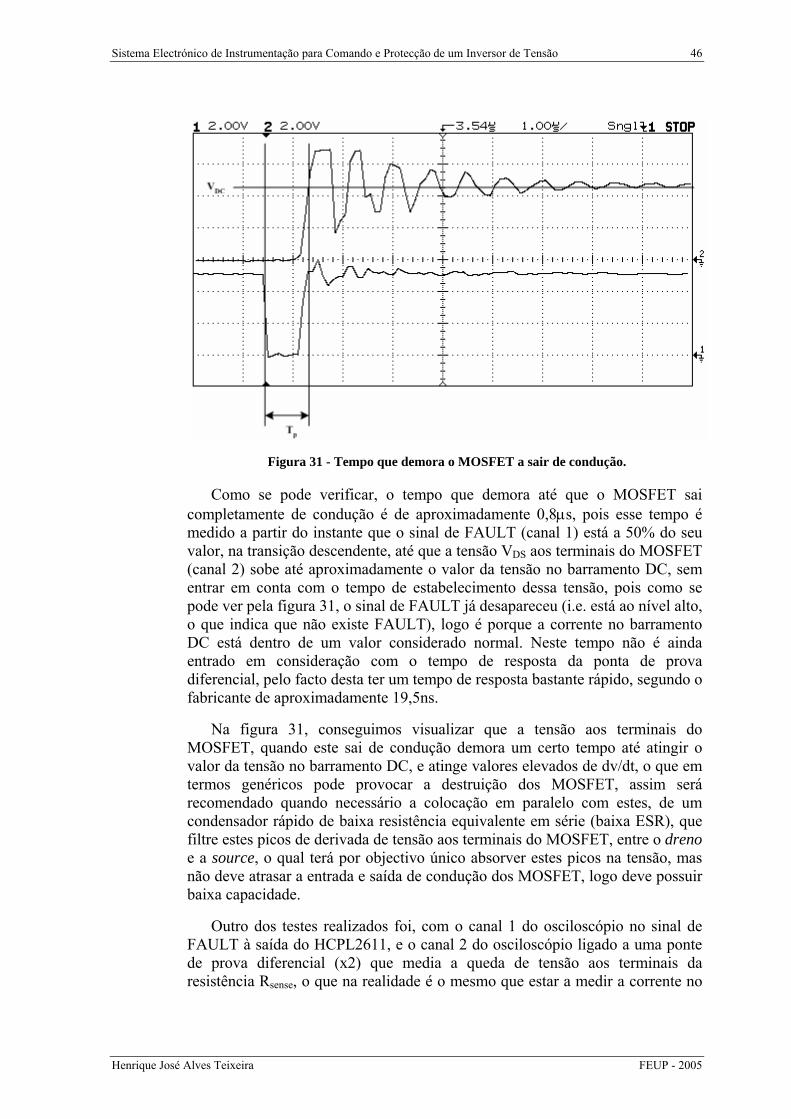
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 46
Figura 31 - Tempo que demora o MOSFET a sair de condução.
Como se pode verificar, o tempo que demora até que o MOSFET sai completamente de condução é de aproximadamente 0,8µs, pois esse tempo é medido a partir do instante que o sinal de FAULT (canal 1) está a 50% do seu valor, na transição descendente, até que a tensão VDS aos terminais do MOSFET (canal 2) sobe até aproximadamente o valor da tensão no barramento DC, sem entrar em conta com o tempo de estabelecimento dessa tensão, pois como se pode ver pela figura 31, o sinal de FAULT já desapareceu (i.e. está ao nível alto, o que indica que não existe FAULT), logo é porque a corrente no barramento DC está dentro de um valor considerado normal. Neste tempo não é ainda entrado em consideração com o tempo de resposta da ponta de prova diferencial, pelo facto desta ter um tempo de resposta bastante rápido, segundo o fabricante de aproximadamente 19,5ns.
Na figura 31, conseguimos visualizar que a tensão aos terminais do MOSFET, quando este sai de condução demora um certo tempo até atingir o valor da tensão no barramento DC, e atinge valores elevados de dv/dt, o que em termos genéricos pode provocar a destruição dos MOSFET, assim será recomendado quando necessário a colocação em paralelo com estes, de um condensador rápido de baixa resistência equivalente em série (baixa ESR), que filtre estes picos de derivada de tensão aos terminais do MOSFET, entre o dreno e a source, o qual terá por objectivo único absorver estes picos na tensão, mas não deve atrasar a entrada e saída de condução dos MOSFET, logo deve possuir baixa capacidade.
Outro dos testes realizados foi, com o canal 1 do osciloscópio no sinal de FAULT à saída do HCPL2611, e o canal 2 do osciloscópio ligado a uma ponte de prova diferencial (x2) que media a queda de tensão aos terminais da resistência Rsense, o que na realidade é o mesmo que estar a medir a corrente no
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 47
barramento DC, como se apresenta na figura 32, fomos medir o tempo que demorou até a corrente no barramento DC se anular.
Figura 32 - Circuito que permite medir o tempo que demora a anular-se a corrente no barramento DC.
Com o circuito apresentado na figura 32, consegue verificar-se com maior exactidão o tempo que demora o MOSFET a sair de condução, desde que ocorre o sinal de FAULT até que este fica ao corte e também o tempo que demora a anular-se a corrente. Pois quando a corrente no barramento DC for nula é porque o MOSFET já saiu de condução, e vê-se que a corrente é nula porque a queda de tensão aos terminais da resistência Rsense também é nula, pois esta é uma imagem da corrente.
Na figura 33 podemos verificar que quando o sinal de FAULT ocorre (canal 1), o qual acontece para o valor da tensão na resistência de medida Rsense atingir aproximadamente 1,5V (canal 2), vai fazer com que seja retirada a excitação ao MOSFET, logo a corrente no barramento DC tenderá a anular-se, o que acontece em cerca de 1,1µs.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 48
Figura 33 – Sinal de Fault versus queda de tensão aos terminais de Rsense.
Assim, de forma a conseguirmos obter um tempo mais preciso, consideramos que o instante inicial em que é dada a ordem para retirar o MOSFET de condução é quando o sinal de FAULT está a 100% do seu valor, e que quando o MOSFET já saiu completamente de condução, é no instante em que a corrente vem a zero. Na figura 33 conseguimos ver o tempo aproximado que demora isto a acontecer, é cerca de 1,15µs. Verifica-se também que a corrente toma um valor negativo quando se está a anular, isto deve-se principalmente ao facto da energia no circuito não desaparecer instantaneamente. A variação negativa da corrente poderia ser de menor valor se não existissem tantas indutâncias parasitas, provocadas pelos vários condutores que ligam o circuito. O tempo que demora ao MOSFET a entrar em corte pode medir-se na passagem por zero da corrente, dando um valor de aproximadamente 0,75µs.
Assim, com estes testes realizados conseguimos medir o tempo de actuação do sinal FAULT, para colocar os MOSFET ao corte, ainda que este seja um tempo aproximado. Nestes testes não foi entrado em consideração com o tempo de propagação do HCPL2611, o qual segundo o fabricante é de aproximadamente 50ns.
Procedeu-se a diversos testes para confirmar a robustez do processo ficando provada a sua eficácia pelo facto de os MOSFET nunca terem sido destruídos e terem sempre saído de condução, como era previsto.
3.6. Conclusão
Neste capítulo, começamos por falar sobre o sistema que se pretendia desenvolver e por descrever detalhadamente cada bloco.
No ponto dois, foi descrito o sistema de protecções a utilizar, para que caso ocorram curto-circuitos, não provoquem a destruição do material.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 49
No ponto três foi apresentada uma forma de alimentação do circuito de drive aos MOSFET, aproveitando neste caso a alimentação do barramento DC para a alimentação do circuito, recorrendo a um esquema de baixo custo.
No ponto quatro foi descrito o circuito de drive, como funciona quando ocorre um defeito, e como é controlado o sinal de PWM que permite colocar em condução os MOSFET.
Por fim, no último ponto, são apresentados alguns gráficos que demonstram a eficácia do sistema de protecção e a sua actuação em tempo suficiente para não chegar a haver destruição de material.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 50
Capítulo 4
Resultados experimentais
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 51
4. Resultados Experimentais
4.1. Efeitos provocados pelo inversor
Um dos aspectos mais importantes associados a este tipo de projectos, é a problemática do ruído provocado por interferências electromagnéticas, quer por indução quer por radiação. Assim, nos parágrafos seguintes vamos tentar demonstrar e comprovar algumas dessas preocupações, bem como observar os resultados de várias formas de provocar a diminuição desses efeitos.
Na figura 34, podemos visualizar os principais elementos constituintes do sistema realmente construído, pois é nestes que todo o estudo está centrado e a partir dos quais poderá existir ruído, bem como os diversos caminhos através dos quais o ruído se pode propagar.
Figura 34 - Componentes principais do circuito.
O principal ruído provocado por este tipo de sistemas, é a interferência electromagnética (EMI), cuja principal fonte é o drive AC, muito utilizado para o accionamento de motores de indução monofásicos ou trifásicos (o nosso caso), porque permite com bastante eficácia, controlar a velocidade do motor.
O principal ruído criado por este drive, é o denominado ruído de modo comum (CM), o qual é uma interferência electromagnética induzida nos sinais referenciados à terra.
Na figura 35 é apresentado um esquema simplificado, onde podemos visualizar as diferentes componentes parasitas que existem num sistema deste tipo, entre o drive e o motor, através do cabo de interligação.
Henrique José Alves Teixeira FEUP - 2005
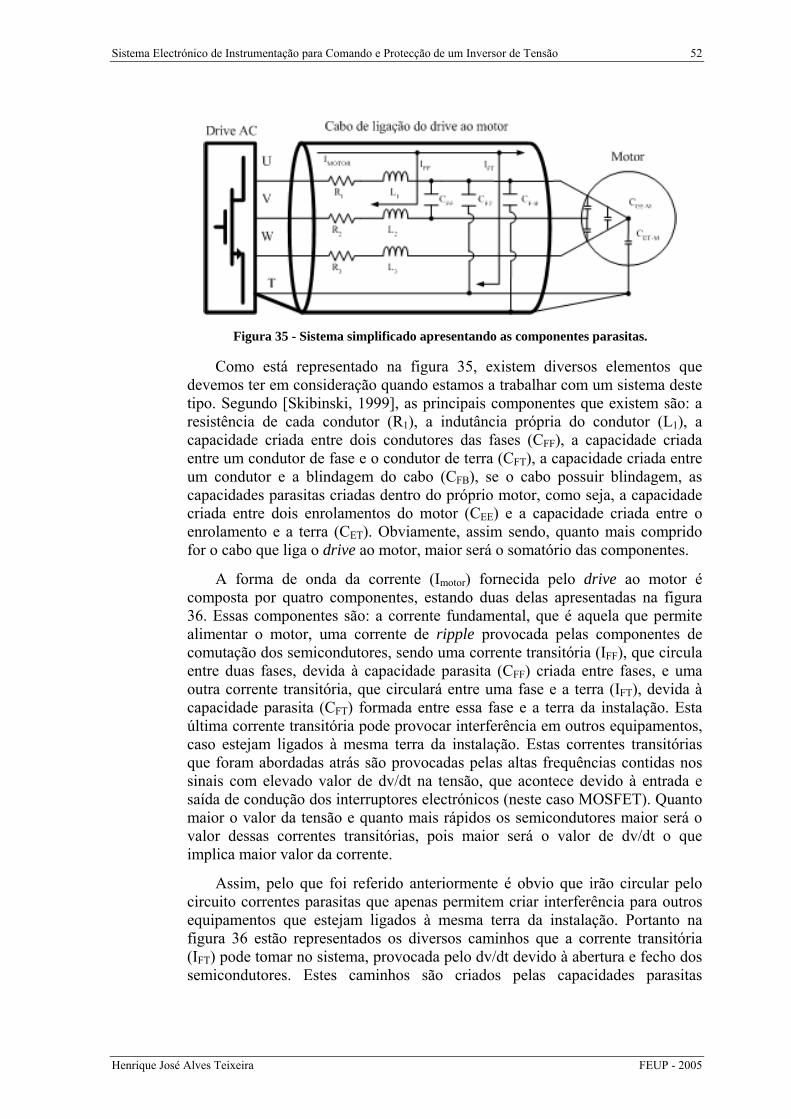
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 52
Figura 35 - Sistema simplificado apresentando as componentes parasitas.
Como está representado na figura 35, existem diversos elementos que devemos ter em consideração quando estamos a trabalhar com um sistema deste tipo. Segundo [Skibinski, 1999], as principais componentes que existem são: a resistência de cada condutor (R1), a indutância própria do condutor (L1), a capacidade criada entre dois condutores das fases (CFF), a capacidade criada entre um condutor de fase e o condutor de terra (CFT), a capacidade criada entre um condutor e a blindagem do cabo (CFB), se o cabo possuir blindagem, as capacidades parasitas criadas dentro do próprio motor, como seja, a capacidade criada entre dois enrolamentos do motor (CEE) e a capacidade criada entre o enrolamento e a terra (CET). Obviamente, assim sendo, quanto mais comprido for o cabo que liga o drive ao motor, maior será o somatório das componentes.
A forma de onda da corrente (Imotor) fornecida pelo drive ao motor é composta por quatro componentes, estando duas delas apresentadas na figura 36. Essas componentes são: a corrente fundamental, que é aquela que permite alimentar o motor, uma corrente de ripple provocada pelas componentes de comutação dos semicondutores, sendo uma corrente transitória (IFF), que circula entre duas fases, devida à capacidade parasita (CFF) criada entre fases, e uma outra corrente transitória, que circulará entre uma fase e a terra (IFT), devida à capacidade parasita (CFT) formada entre essa fase e a terra da instalação. Esta última corrente transitória pode provocar interferência em outros equipamentos, caso estejam ligados à mesma terra da instalação. Estas correntes transitórias que foram abordadas atrás são provocadas pelas altas frequências contidas nos sinais com elevado valor de dv/dt na tensão, que acontece devido à entrada e saída de condução dos interruptores electrónicos (neste caso MOSFET). Quanto maior o valor da tensão e quanto mais rápidos os semicondutores maior será o valor dessas correntes transitórias, pois maior será o valor de dv/dt o que implica maior valor da corrente.
Assim, pelo que foi referido anteriormente é obvio que irão circular pelo circuito correntes parasitas que apenas permitem criar interferência para outros equipamentos que estejam ligados à mesma terra da instalação. Portanto na figura 36 estão representados os diversos caminhos que a corrente transitória (IFT) pode tomar no sistema, provocada pelo dv/dt devido à abertura e fecho dos semicondutores. Estes caminhos são criados pelas capacidades parasitas
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 53
existentes que foram referidas anteriormente.
Figura 36 - Caminhos criados para a circulação da corrente de ruído criada pelo dv/dt na tensão.
Estes caminhos apresentados na figura 36, poderão ser dificultados se tivermos em atenção algumas formas de ligação à terra e a utilização de blindagens. Na figura apenas estão apresentados os caminhos que o ruído toma por condução, mas é obvio que o ruído também se propaga por radiação e pode provocar interferência noutros equipamentos próximos. No âmbito deste trabalho não vamos abordar o estudo relativo ao ruído por radiação, pois esse será atenuado utilizando cabos com blindagem. Vamos debruçar-nos sobre o ruído conduzido, em modo comum, pois é aquele que pode provocar interferência em outros equipamentos que estejam ligados à mesma terra da instalação.
Para começar este nosso estudo, fomos adquirir uma imagem da corrente na terra da instalação, com o motor parado, sem sinal de PWM. Para isso recorremos ao esquema apresentado na figura 37.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 54
Figura 37 - Esquema para aquisição de ruído existente na terra da instalação.
Assim, com a ponta de prova de corrente em torno do condutor que liga o corpo do motor à terra, foi medida a corrente de ruído que circula na terra da instalação, provocada por outros equipamentos ligados à mesma terra, pois esta poderia estar a ser poluída por outro equipamento ligado à mesma terra do sistema, assim foi adquirida a seguinte imagem.
Figura 38 - Imagem de ruído existente na terra da instalação.
Através da figura 38, é possível verificar que a terra da instalação está razoavelmente “limpa”, apesar de se notarem alguns pequenos picos podemos considerar que não existe ruído a circular.
Todas as imagens apresentadas, foram adquiridas em vários pontos do sistema com o osciloscópio da HP 54601B, sendo que a frequência de comutação dos interruptores electrónicos do drive é de aproximadamente 5KHz.
Henrique José Alves Teixeira FEUP - 2005
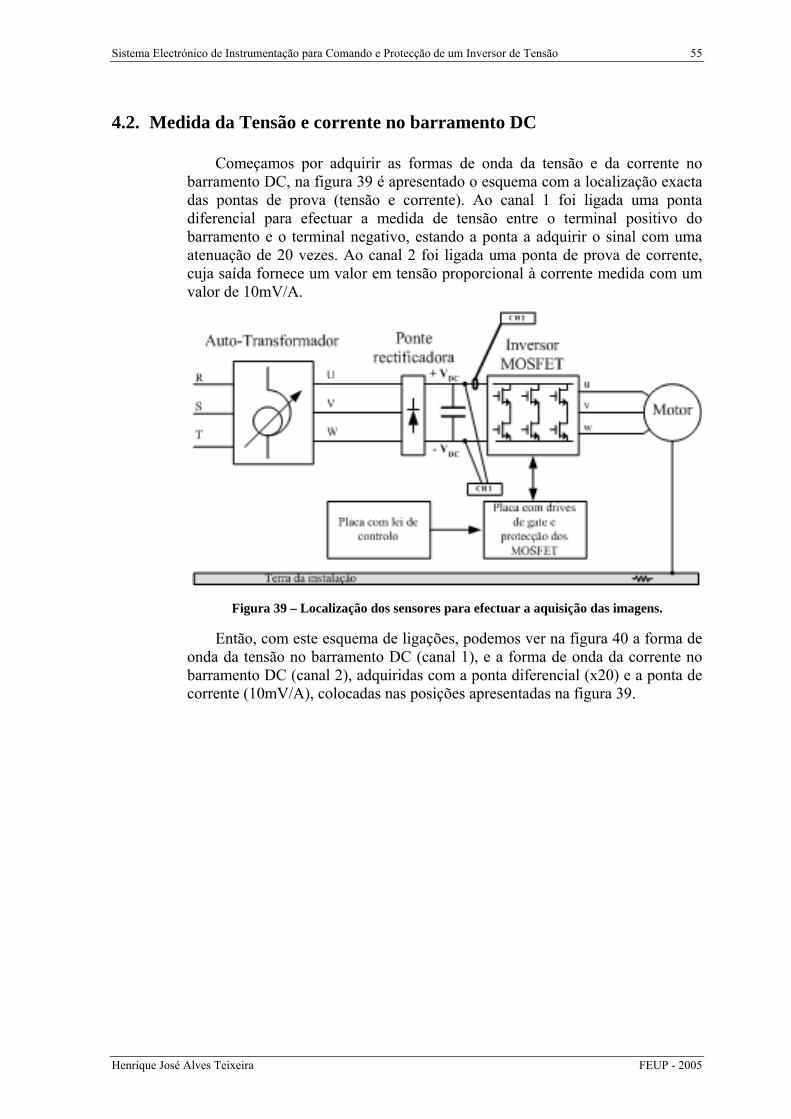
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 55
4.2. Medida da Tensão e corrente no barramento DC
Começamos por adquirir as formas de onda da tensão e da corrente no barramento DC, na figura 39 é apresentado o esquema com a localização exacta das pontas de prova (tensão e corrente). Ao canal 1 foi ligada uma ponta diferencial para efectuar a medida de tensão entre o terminal positivo do barramento e o terminal negativo, estando a ponta a adquirir o sinal com uma atenuação de 20 vezes. Ao canal 2 foi ligada uma ponta de prova de corrente, cuja saída fornece um valor em tensão proporcional à corrente medida com um valor de 10mV/A.
Figura 39 – Localização dos sensores para efectuar a aquisição das imagens.
Então, com este esquema de ligações, podemos ver na figura 40 a forma de onda da tensão no barramento DC (canal 1), e a forma de onda da corrente no barramento DC (canal 2), adquiridas com a ponta diferencial (x20) e a ponta de corrente (10mV/A), colocadas nas posições apresentadas na figura 39.
Henrique José Alves Teixeira FEUP - 2005
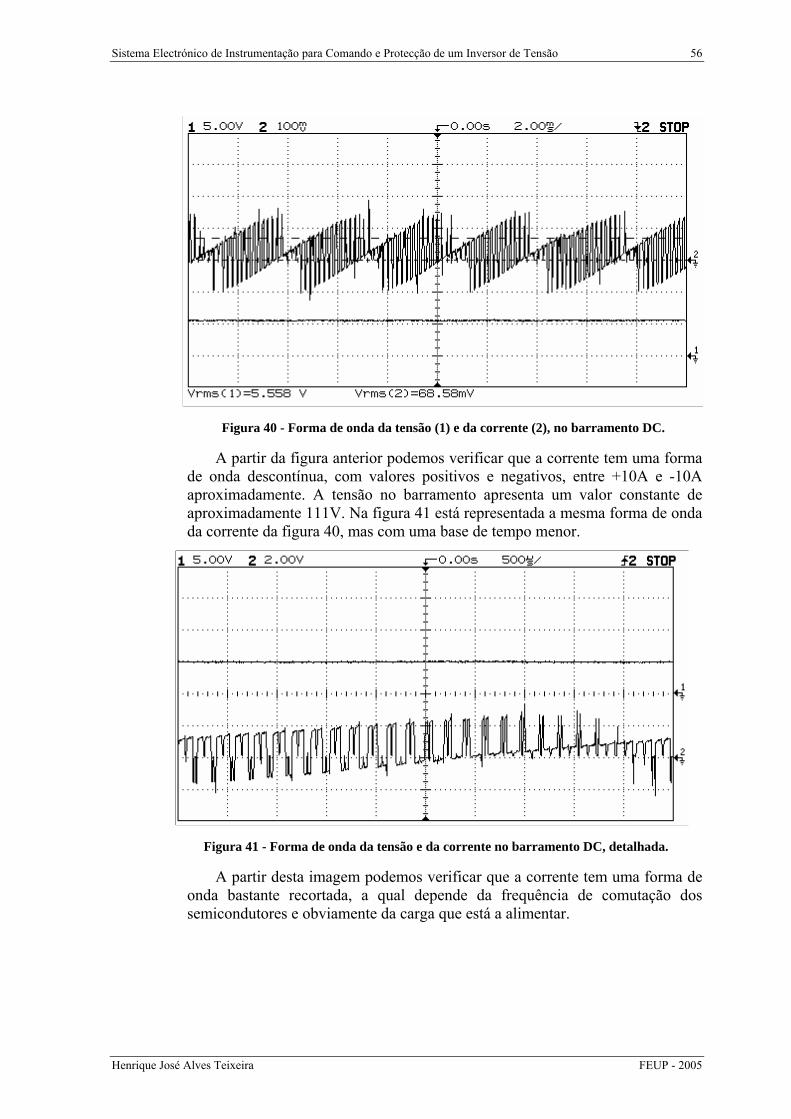
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 56
Figura 40 - Forma de onda da tensão (1) e da corrente (2), no barramento DC.
A partir da figura anterior podemos verificar que a corrente tem uma forma de onda descontínua, com valores positivos e negativos, entre +10A e -10A aproximadamente. A tensão no barramento apresenta um valor constante de aproximadamente 111V. Na figura 41 está representada a mesma forma de onda da corrente da figura 40, mas com uma base de tempo menor.
Figura 41 - Forma de onda da tensão e da corrente no barramento DC, detalhada.
A partir desta imagem podemos verificar que a corrente tem uma forma de onda bastante recortada, a qual depende da frequência de comutação dos semicondutores e obviamente da carga que está a alimentar.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 57
4.3. Medida de tensão e corrente à saída do inversor
A seguir na figura 42 é apresentado o esquema utilizado para a aquisição das formas de onda da tensão composta entre duas fases e da corrente numa das fases, que alimentam o motor.
Figura 42 - Esquema utilizado para a aquisição da tensão composta e corrente numa fase.
Com este tipo de ligação é possível visualizar quer a tensão quer a corrente fornecidas pelo inversor ao motor. Na figura 43 estão as respectivas formas de onda, da tensão composta e da corrente, sendo estas imagens adquiridas com as mesmas pontas referidas anteriormente e com as mesmas atenuações.
Figura 43 - Formas de onda da tensão composta e corrente que alimentam o motor.
Podemos verificar que a tensão que alimenta o motor apresenta uma forma de onda que se deve ao facto de ser gerada a partir do sinal de PWM que está a
Henrique José Alves Teixeira FEUP - 2005
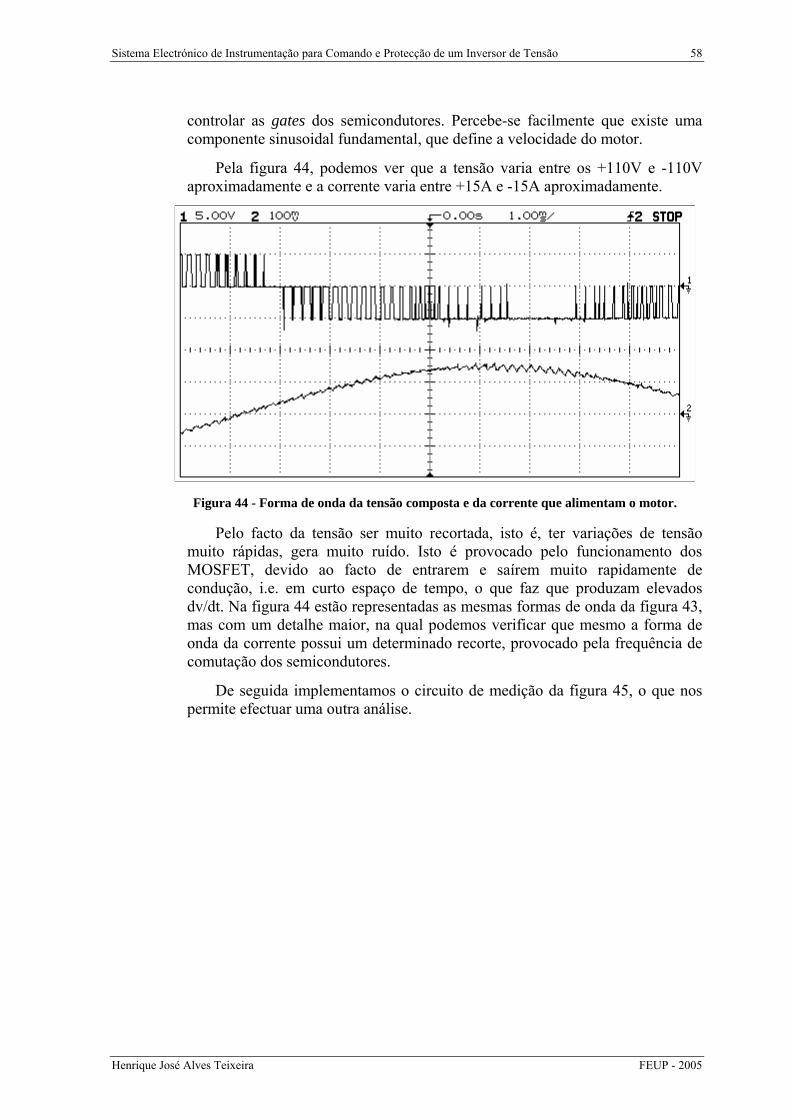
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 58
controlar as gates dos semicondutores. Percebe-se facilmente que existe uma componente sinusoidal fundamental, que define a velocidade do motor.
Pela figura 44, podemos ver que a tensão varia entre os +110V e -110V aproximadamente e a corrente varia entre +15A e -15A aproximadamente.
Figura 44 - Forma de onda da tensão composta e da corrente que alimentam o motor.
Pelo facto da tensão ser muito recortada, isto é, ter variações de tensão muito rápidas, gera muito ruído. Isto é provocado pelo funcionamento dos MOSFET, devido ao facto de entrarem e saírem muito rapidamente de condução, i.e. em curto espaço de tempo, o que faz que produzam elevados dv/dt. Na figura 44 estão representadas as mesmas formas de onda da figura 43, mas com um detalhe maior, na qual podemos verificar que mesmo a forma de onda da corrente possui um determinado recorte, provocado pela frequência de comutação dos semicondutores.
De seguida implementamos o circuito de medição da figura 45, o que nos permite efectuar uma outra análise.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 59
Figura 45 - Medição de ruído introduzido na terra.
Como se pode verificar pela figura, no esquema é possível ver o caminho que a corrente de ruído de modo comum (IFT) provavelmente irá percorrer. Este é criado através das capacidades parasitas criadas entre os enrolamentos e o corpo do motor, e através das capacidades parasitas criadas entre os condutores das fases e o condutor de terra. Na figura 46 é apresentada parte dessa interferência na terra da instalação. Note-se que a escala da forma de onda nº 2 corresponde a 1A/div., dado que a ponta de prova utilizada tem uma sensibilidade de 10mV/A.
Figura 46 – Tensão simples e ruído introduzido na terra da instalação.
Como podemos verificar pela figura 46, o condutor de referenciação do motor à terra da instalação já apresenta picos de ruído provocados pela entrada e saída de condução dos MOSFET.
Henrique José Alves Teixeira FEUP - 2005
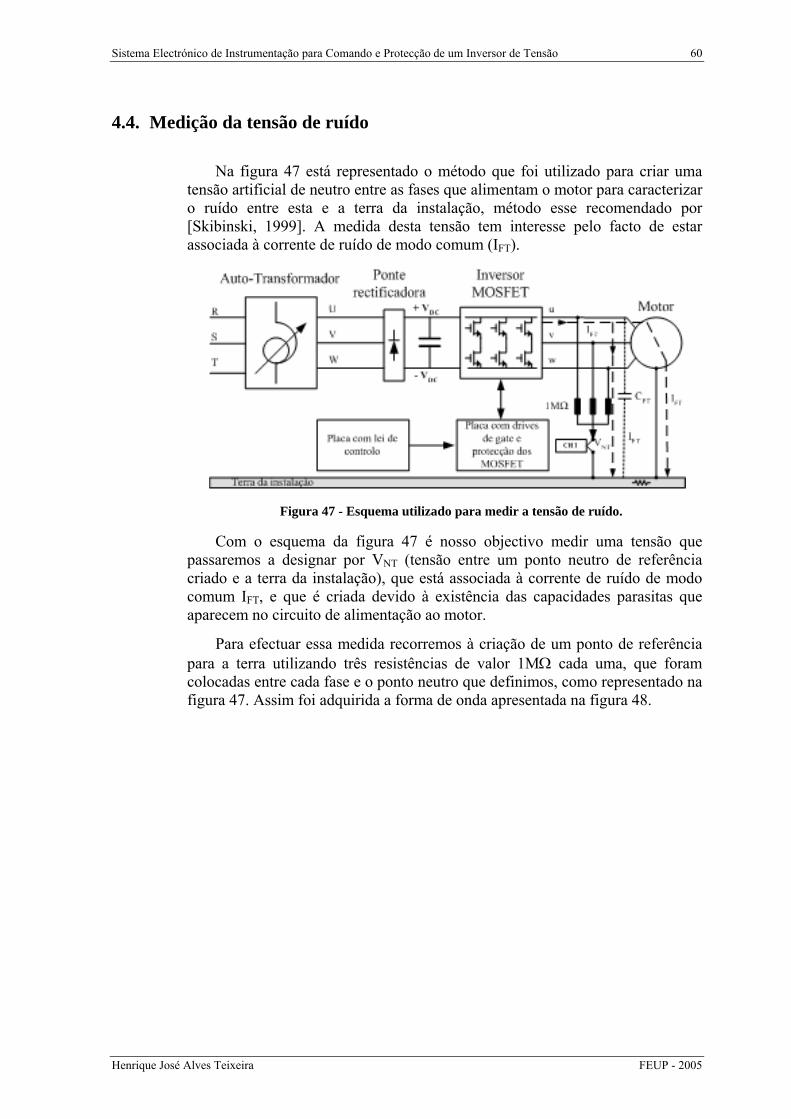
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 60
4.4. Medição da tensão de ruído
Na figura 47 está representado o método que foi utilizado para criar uma tensão artificial de neutro entre as fases que alimentam o motor para caracterizar o ruído entre esta e a terra da instalação, método esse recomendado por [Skibinski, 1999]. A medida desta tensão tem interesse pelo facto de estar associada à corrente de ruído de modo comum (IFT).
Figura 47 - Esquema utilizado para medir a tensão de ruído.
Com o esquema da figura 47 é nosso objectivo medir uma tensão que passaremos a designar por VNT (tensão entre um ponto neutro de referência criado e a terra da instalação), que está associada à corrente de ruído de modo comum IFT, e que é criada devido à existência das capacidades parasitas que aparecem no circuito de alimentação ao motor.
Para efectuar essa medida recorremos à criação de um ponto de referência para a terra utilizando três resistências de valor 1MΩ cada uma, que foram colocadas entre cada fase e o ponto neutro que definimos, como representado na figura 47. Assim foi adquirida a forma de onda apresentada na figura 48.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 61
Figura 48- Forma de onda da Tensão VNT.
Nesta figura podemos verificar que a tensão de ruído possui uma frequência de 150Hz, frequência essa que é provocada pela ponte rectificadora a díodos que está a rectificar a tensão à saída do auto-transformador para gerar o barramento DC e está localizada antes do condensador e do inversor, como explicado em [Mohan, 1995].
Figura 49 - Forma de onda da tensão VNT, com maior detalhe.
Na figura 49 é representada a mesma forma de onda da tensão de ruído que está representada na figura 48, só que com maior detalhe.
De forma a não existir qualquer dúvida relativamente à frequência da tensão VNT, na figura 50 estão representadas a forma de onda da tensão VNT e a forma de onda da corrente numa fase, com o motor alimentado a uma frequência de 80Hz.
Henrique José Alves Teixeira FEUP - 2005
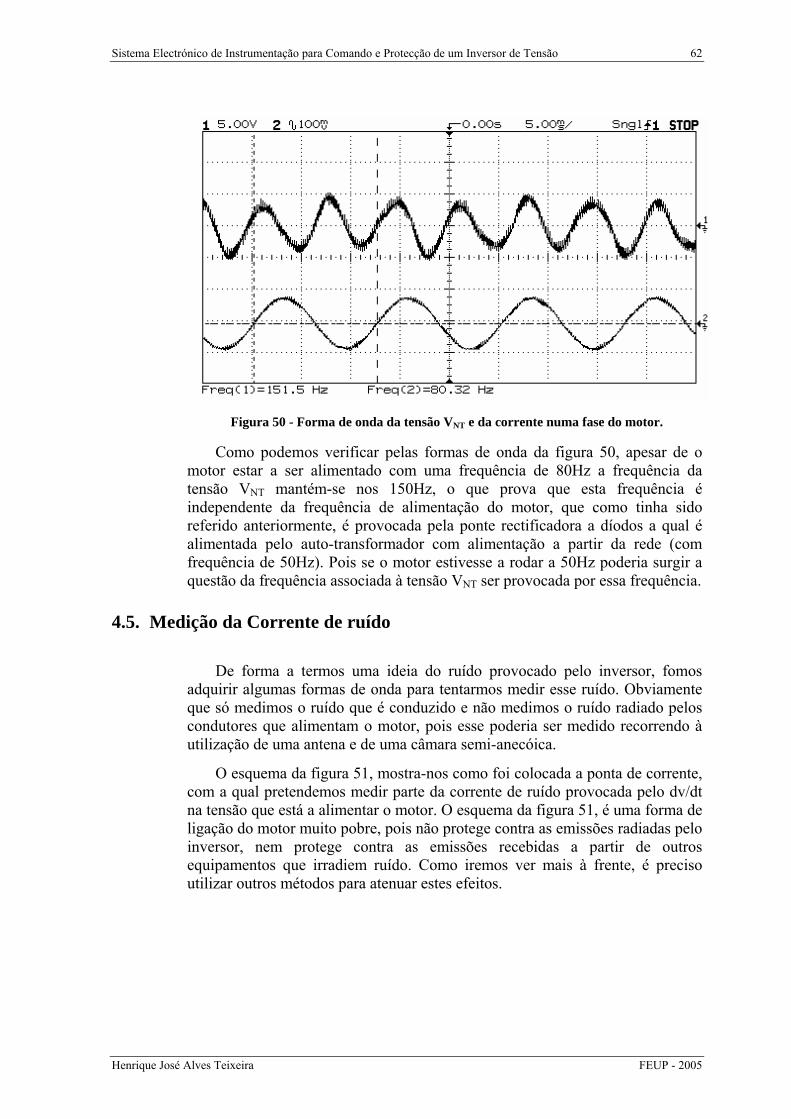
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 62
Figura 50 - Forma de onda da tensão VNT e da corrente numa fase do motor.
Como podemos verificar pelas formas de onda da figura 50, apesar de o motor estar a ser alimentado com uma frequência de 80Hz a frequência da tensão VNT mantém-se nos 150Hz, o que prova que esta frequência é independente da frequência de alimentação do motor, que como tinha sido referido anteriormente, é provocada pela ponte rectificadora a díodos a qual é alimentada pelo auto-transformador com alimentação a partir da rede (com frequência de 50Hz). Pois se o motor estivesse a rodar a 50Hz poderia surgir a questão da frequência associada à tensão VNT ser provocada por essa frequência.
4.5. Medição da Corrente de ruído
De forma a termos uma ideia do ruído provocado pelo inversor, fomos adquirir algumas formas de onda para tentarmos medir esse ruído. Obviamente que só medimos o ruído que é conduzido e não medimos o ruído radiado pelos condutores que alimentam o motor, pois esse poderia ser medido recorrendo à utilização de uma antena e de uma câmara semi-anecóica.
O esquema da figura 51, mostra-nos como foi colocada a ponta de corrente, com a qual pretendemos medir parte da corrente de ruído provocada pelo dv/dt na tensão que está a alimentar o motor. O esquema da figura 51, é uma forma de ligação do motor muito pobre, pois não protege contra as emissões radiadas pelo inversor, nem protege contra as emissões recebidas a partir de outros equipamentos que irradiem ruído. Como iremos ver mais à frente, é preciso utilizar outros métodos para atenuar estes efeitos.
Henrique José Alves Teixeira FEUP - 2005
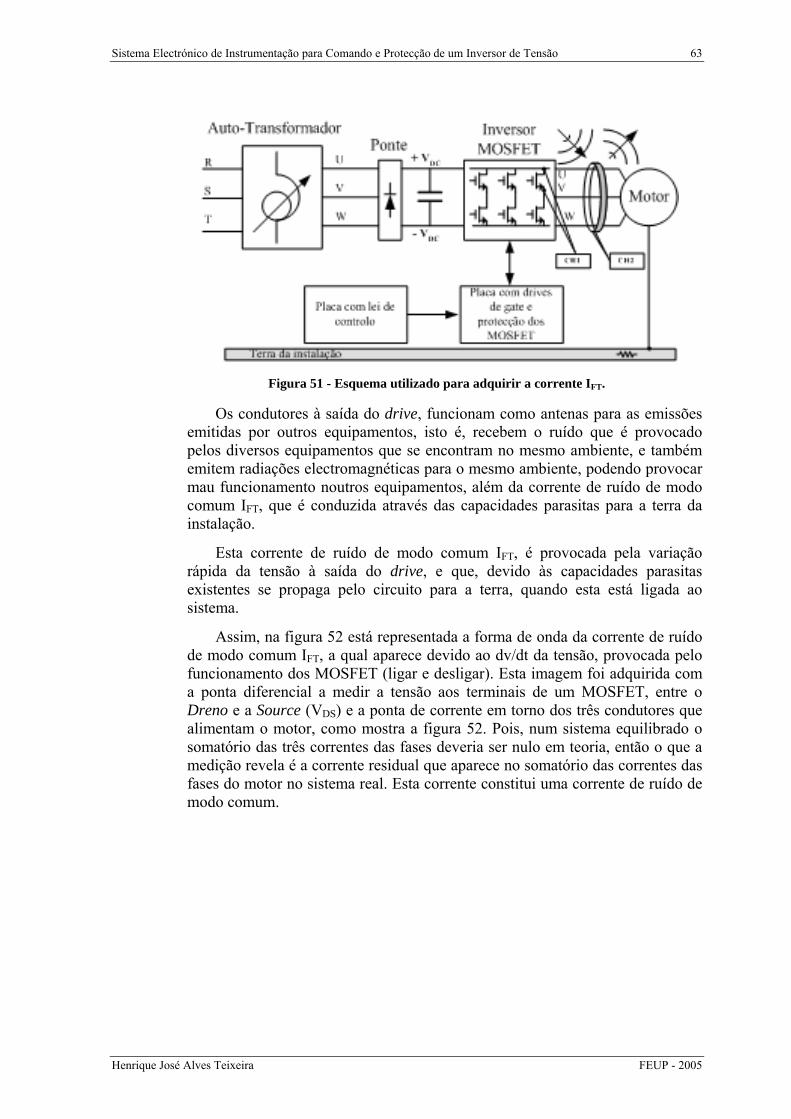
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 63
Figura 51 - Esquema utilizado para adquirir a corrente IFT.
Os condutores à saída do drive, funcionam como antenas para as emissões emitidas por outros equipamentos, isto é, recebem o ruído que é provocado pelos diversos equipamentos que se encontram no mesmo ambiente, e também emitem radiações electromagnéticas para o mesmo ambiente, podendo provocar mau funcionamento noutros equipamentos, além da corrente de ruído de modo comum IFT, que é conduzida através das capacidades parasitas para a terra da instalação.
Esta corrente de ruído de modo comum IFT, é provocada pela variação rápida da tensão à saída do drive, e que, devido às capacidades parasitas existentes se propaga pelo circuito para a terra, quando esta está ligada ao sistema.
Assim, na figura 52 está representada a forma de onda da corrente de ruído de modo comum IFT, a qual aparece devido ao dv/dt da tensão, provocada pelo funcionamento dos MOSFET (ligar e desligar). Esta imagem foi adquirida com a ponta diferencial a medir a tensão aos terminais de um MOSFET, entre o Dreno e a Source (VDS) e a ponta de corrente em torno dos três condutores que alimentam o motor, como mostra a figura 52. Pois, num sistema equilibrado o somatório das três correntes das fases deveria ser nulo em teoria, então o que a medição revela é a corrente residual que aparece no somatório das correntes das fases do motor no sistema real. Esta corrente constitui uma corrente de ruído de modo comum.
Henrique José Alves Teixeira FEUP - 2005
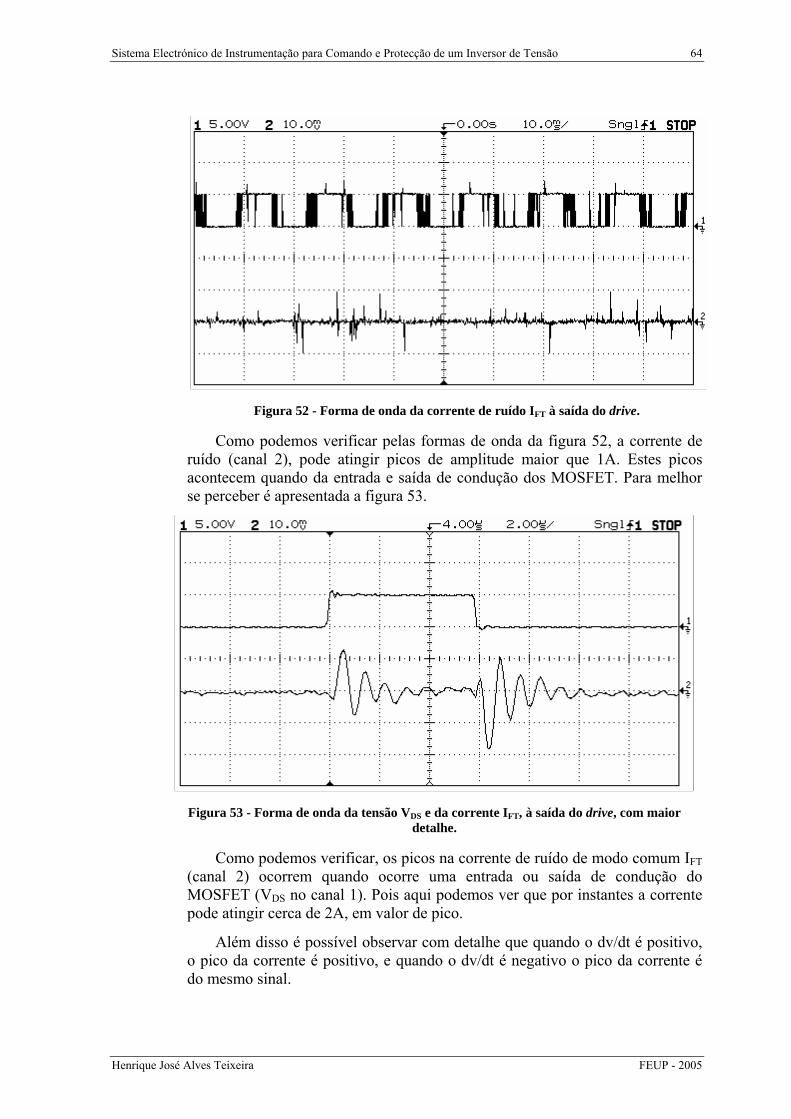
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 64
Figura 52 - Forma de onda da corrente de ruído IFT à saída do drive.
Como podemos verificar pelas formas de onda da figura 52, a corrente de ruído (canal 2), pode atingir picos de amplitude maior que 1A. Estes picos acontecem quando da entrada e saída de condução dos MOSFET. Para melhor se perceber é apresentada a figura 53.
Figura 53 - Forma de onda da tensão VDS e da corrente IFT, à saída do drive, com maior detalhe.
Como podemos verificar, os picos na corrente de ruído de modo comum IFT (canal 2) ocorrem quando ocorre uma entrada ou saída de condução do MOSFET (VDS no canal 1). Pois aqui podemos ver que por instantes a corrente pode atingir cerca de 2A, em valor de pico.
Além disso é possível observar com detalhe que quando o dv/dt é positivo, o pico da corrente é positivo, e quando o dv/dt é negativo o pico da corrente é do mesmo sinal.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 65
Na figura 54, está representado outro esquema para a medição da corrente de ruído de modo comum, introduzida na terra da instalação.
Figura 54 - Esquema para medição de IFT na ligação do motor à terra.
Com este esquema apresentado na figura 54, foram obtidas as figuras que a seguir se apresentam. De referir que estas figuras foram obtidas com o motor a rodar a 1500rpm e com uma carga de 5Nm, para melhor se notar o efeito.
Figura 55 - Formas de onda da tensão VDS e da corrente IFT.
Na figura 56 são apresentadas as mesmas formas de onda da figura 55, mas com um maior detalhe. Pois podemos verificar que a corrente chega a atingir picos de aproximadamente 3A. Este aumento da corrente de ruído resulta do funcionamento em carga.
Henrique José Alves Teixeira FEUP - 2005
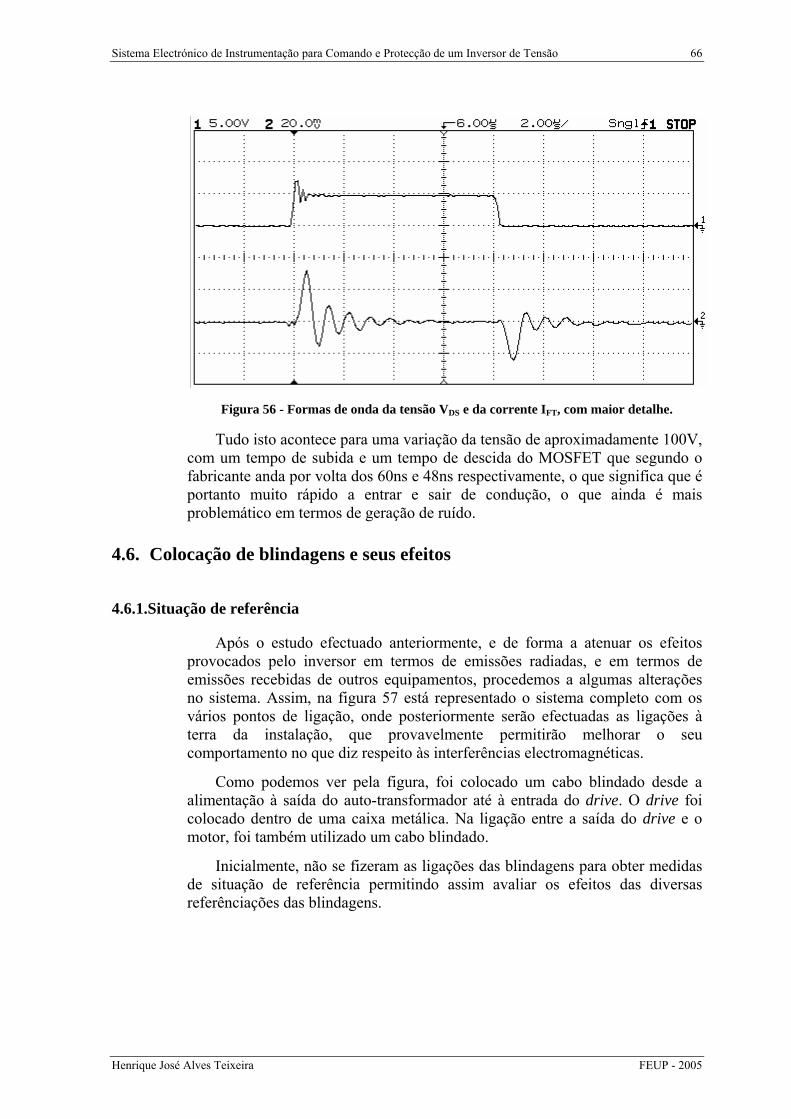
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 66
Figura 56 - Formas de onda da tensão VDS e da corrente IFT, com maior detalhe.
Tudo isto acontece para uma variação da tensão de aproximadamente 100V, com um tempo de subida e um tempo de descida do MOSFET que segundo o fabricante anda por volta dos 60ns e 48ns respectivamente, o que significa que é portanto muito rápido a entrar e sair de condução, o que ainda é mais problemático em termos de geração de ruído.
4.6. Colocação de blindagens e seus efeitos
4.6.1.Situação de referência
Após o estudo efectuado anteriormente, e de forma a atenuar os efeitos provocados pelo inversor em termos de emissões radiadas, e em termos de emissões recebidas de outros equipamentos, procedemos a algumas alterações no sistema. Assim, na figura 57 está representado o sistema completo com os vários pontos de ligação, onde posteriormente serão efectuadas as ligações à terra da instalação, que provavelmente permitirão melhorar o seu comportamento no que diz respeito às interferências electromagnéticas.
Como podemos ver pela figura, foi colocado um cabo blindado desde a alimentação à saída do auto-transformador até à entrada do drive. O drive foi colocado dentro de uma caixa metálica. Na ligação entre a saída do drive e o motor, foi também utilizado um cabo blindado.
Inicialmente, não se fizeram as ligações das blindagens para obter medidas de situação de referência permitindo assim avaliar os efeitos das diversas referênciações das blindagens.
Henrique José Alves Teixeira FEUP - 2005
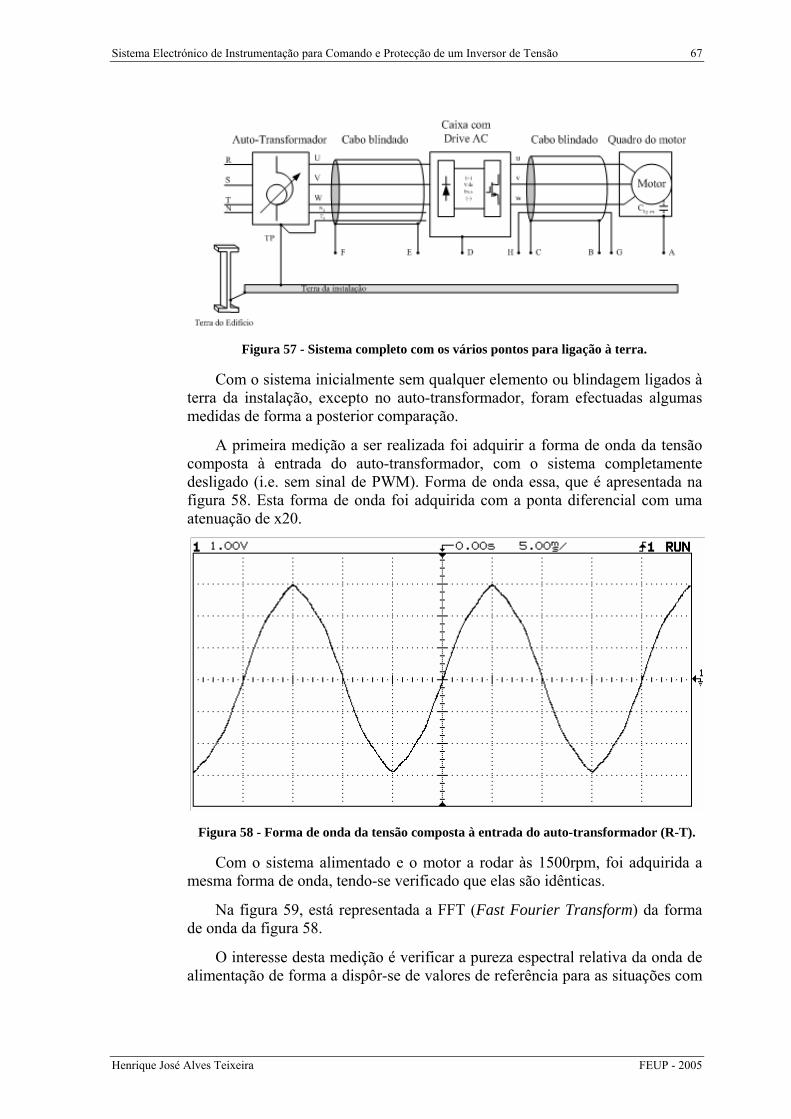
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 67
Figura 57 - Sistema completo com os vários pontos para ligação à terra.
Com o sistema inicialmente sem qualquer elemento ou blindagem ligados à terra da instalação, excepto no auto-transformador, foram efectuadas algumas medidas de forma a posterior comparação.
A primeira medição a ser realizada foi adquirir a forma de onda da tensão composta à entrada do auto-transformador, com o sistema completamente desligado (i.e. sem sinal de PWM). Forma de onda essa, que é apresentada na figura 58. Esta forma de onda foi adquirida com a ponta diferencial com uma atenuação de x20.
Figura 58 - Forma de onda da tensão composta à entrada do auto-transformador (R-T).
Com o sistema alimentado e o motor a rodar às 1500rpm, foi adquirida a mesma forma de onda, tendo-se verificado que elas são idênticas.
Na figura 59, está representada a FFT (Fast Fourier Transform) da forma de onda da figura 58.
O interesse desta medição é verificar a pureza espectral relativa da onda de alimentação de forma a dispôr-se de valores de referência para as situações com
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 68
o motor em funcionamento nas quais se pretende determinar a degradação dos sinais.
Figura 59 - FFT da tensão composta à entrada do auto-transformador.
Esta FFT foi obtida com uma frequência útil de 9,77MHz, com uma escala de 10dB/div e com um nível de referência de -10dBV.
Verifica-se que o nível da densidade de ruído não ultrapassa -15dB.
4.6.2.Situação com o motor a rodar a 1500 rpm
Todas as figuras apresentadas a seguir foram obtidas com o motor alimentado e a rodar às 1500rpm.
De seguida na figura 60 é apresentada a forma de onda da corrente, utilizando a ponta de prova de corrente, com uma escala de 10mV/A, colocada em torno da fase T à entrada do auto-transformador.
Henrique José Alves Teixeira FEUP - 2005
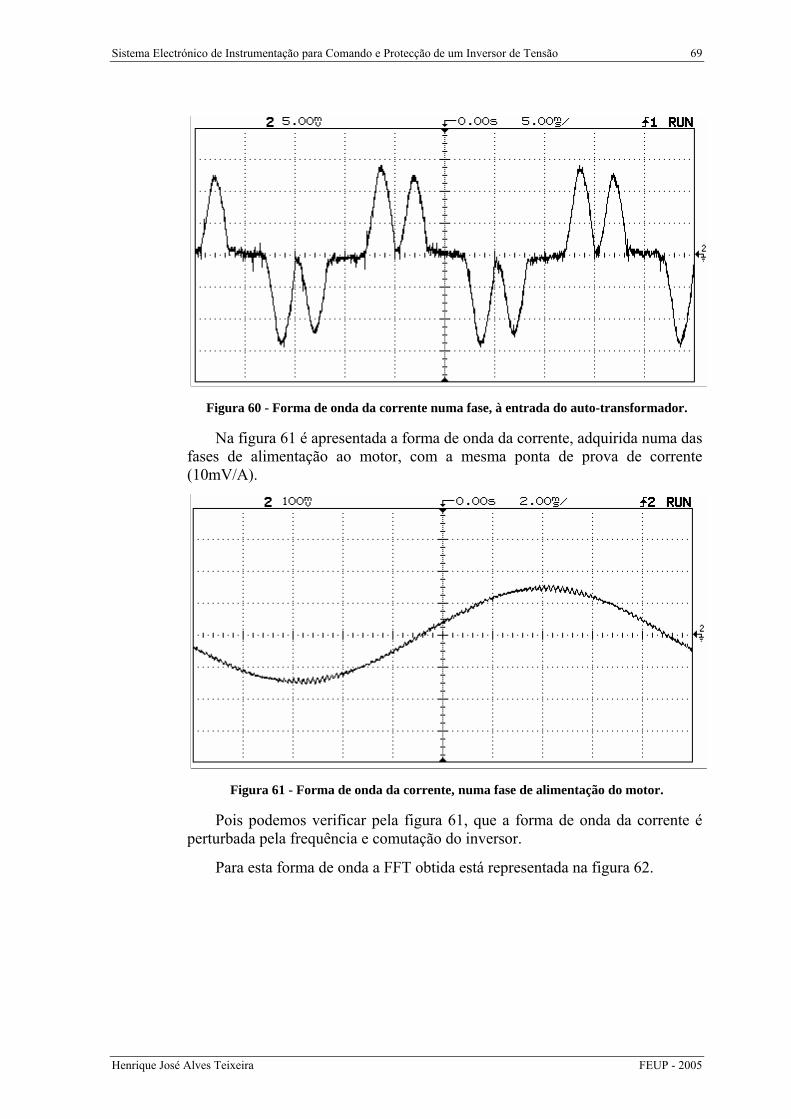
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 69
Figura 60 - Forma de onda da corrente numa fase, à entrada do auto-transformador.
Na figura 61 é apresentada a forma de onda da corrente, adquirida numa das fases de alimentação ao motor, com a mesma ponta de prova de corrente (10mV/A).
Figura 61 - Forma de onda da corrente, numa fase de alimentação do motor.
Pois podemos verificar pela figura 61, que a forma de onda da corrente é perturbada pela frequência e comutação do inversor.
Para esta forma de onda a FFT obtida está representada na figura 62.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 70
Figura 62 - FFT da forma de onda da corrente da figura 62.
Esta FFT foi adquirida com uma frequência útil de 97,7KHz, pois a ponta de corrente possui uma largura de banda até 100KHz, com 10dB/div e um nível de referência de -10dBV.
Como referido atrás, através da FFT, nota-se a existência de uma componente frequêncial a aproximadamente 5KHz e outra para 10KHz, enquanto o restante nível de densidade de ruído não ultrapassa os -35dB.
A seguir, fomos adquirir a corrente de ruído, que estava a circular pelo condutor de terra (TP), antes de entrar no auto-transformador.
Figura 63 - Corrente de ruído e respectiva FFT com o motor a 1500rpm.
Pela figura 63, podemos verificar que no condutor de terra (TP), existente no cabo de ligação do auto-transformador ao drive, no qual mesmo desligado do lado do drive, circula uma pequena corrente de ruído verificada pelos picos
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 71
notados, devido à comutação dos semicondutores.
Na figura 63, em cima temos a forma de onda da corrente que circula no condutor TP, adquirida com a ponta de corrente (10mV/A) e em baixo a sua FFT, adquirida com uma frequência útil de 97,66KHz, uma escala de 10dB/Div e um nível de referência de -45dBV.
Na figura 64, estão apresentadas as mesmas imagens da figura 63, mas agora em vez de o motor estar a rodar às 1500rpm, o motor está parado (0rpm).
Figura 64 - Forma de onda da corrente e FFT no condutor TP a 0rpm.
Nesta figura a FFT foi obtida com a mesma frequência de amostragem, o mesmo valor da escala vertical, mas com um nível de referência de -35dB/V, podemos verificar que nesta situação o nível de densidade de ruído no condutor TP não ultrapassa os -50dB.
Pois, podemos verificar que com o motor parado, o drive não está a comutar, o ruído sofre uma diminuição e o que aparece é provocado por outro equipamento existente no local.
4.6.3.Efeitos do ruído no sistema electrónico de controlo
Será de esperar que as correntes induzidas pelo elevado dv/dt afectem o circuito de comando de alguma forma. Para caracterizar o que acontece no sistema actual mediu-se o conteúdo de ruído numa das linhas digitais de interesse do sistema, a linha do sinal FAULT.
Na figura 65 está representado o sinal de FAULT à saída do HCPL 2611, portanto dentro do quadro do drive, pretende-se com esta imagem ter uma grandeza do ruído existente no interior do drive.
Henrique José Alves Teixeira FEUP - 2005
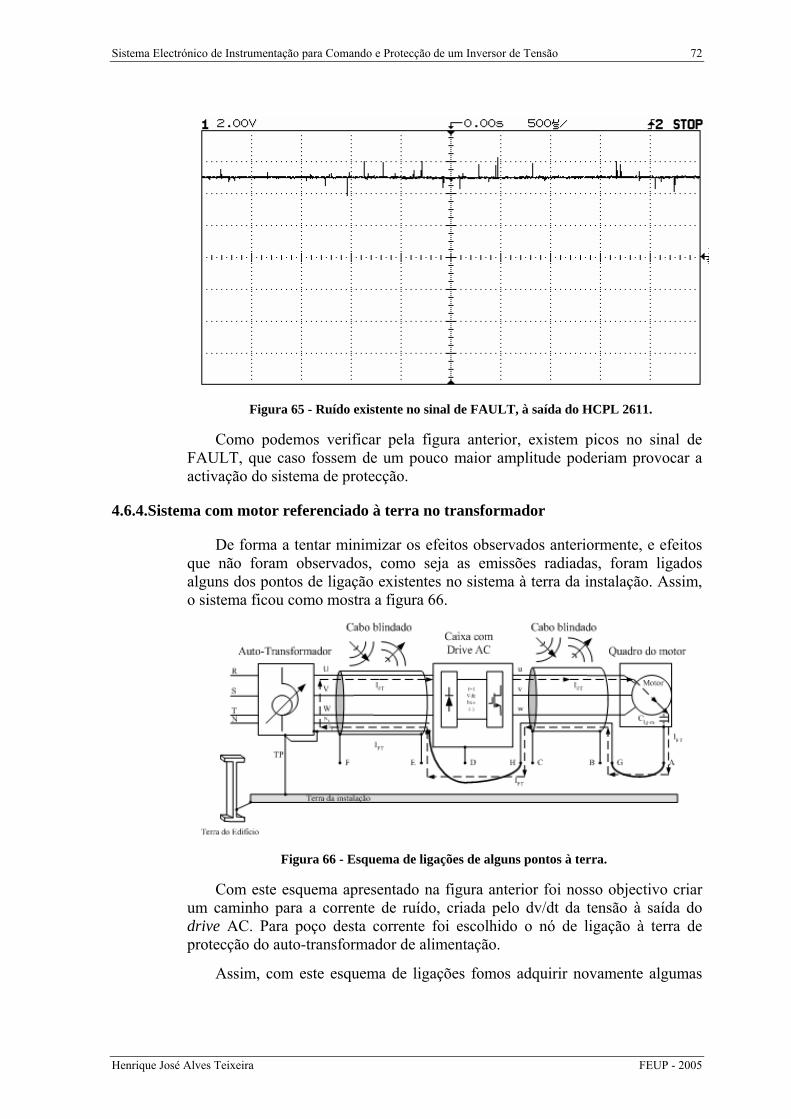
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 72
Figura 65 - Ruído existente no sinal de FAULT, à saída do HCPL 2611.
Como podemos verificar pela figura anterior, existem picos no sinal de FAULT, que caso fossem de um pouco maior amplitude poderiam provocar a activação do sistema de protecção.
4.6.4.Sistema com motor referenciado à terra no transformador
De forma a tentar minimizar os efeitos observados anteriormente, e efeitos que não foram observados, como seja as emissões radiadas, foram ligados alguns dos pontos de ligação existentes no sistema à terra da instalação. Assim, o sistema ficou como mostra a figura 66.
Figura 66 - Esquema de ligações de alguns pontos à terra.
Com este esquema apresentado na figura anterior foi nosso objectivo criar um caminho para a corrente de ruído, criada pelo dv/dt da tensão à saída do drive AC. Para poço desta corrente foi escolhido o nó de ligação à terra de protecção do auto-transformador de alimentação.
Assim, com este esquema de ligações fomos adquirir novamente algumas
Henrique José Alves Teixeira FEUP - 2005
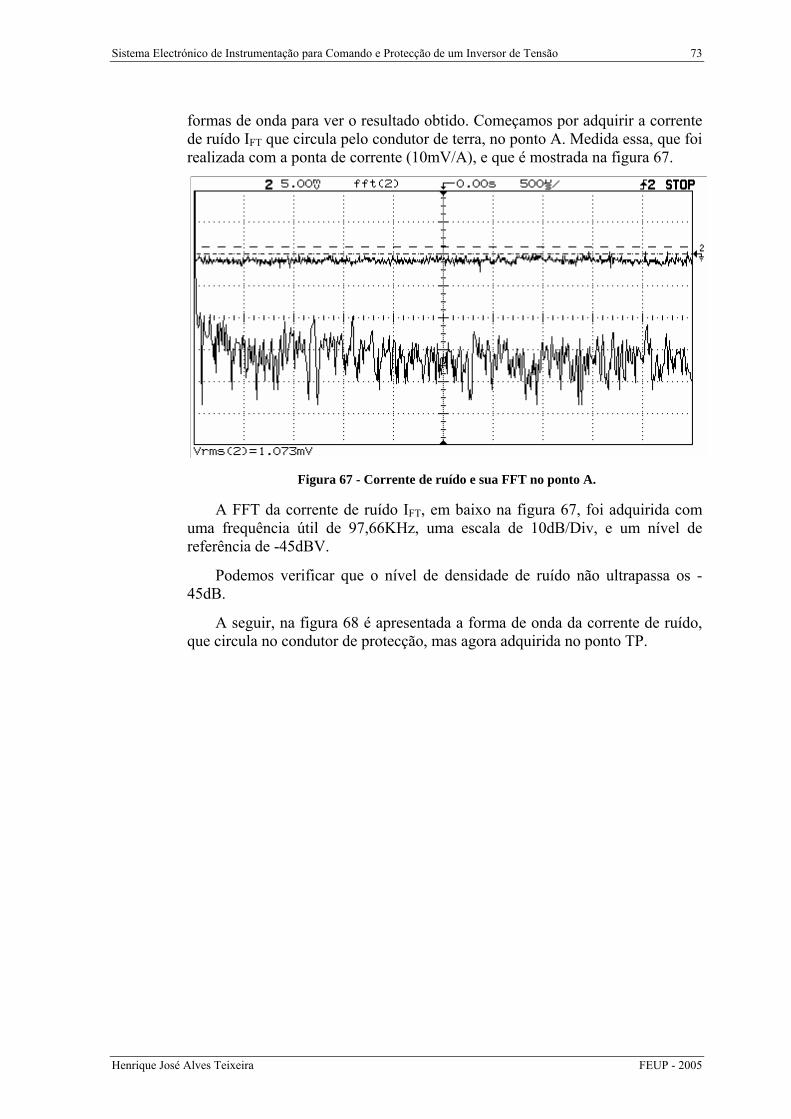
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 73
formas de onda para ver o resultado obtido. Começamos por adquirir a corrente de ruído IFT que circula pelo condutor de terra, no ponto A. Medida essa, que foi realizada com a ponta de corrente (10mV/A), e que é mostrada na figura 67.
Figura 67 - Corrente de ruído e sua FFT no ponto A.
A FFT da corrente de ruído IFT, em baixo na figura 67, foi adquirida com uma frequência útil de 97,66KHz, uma escala de 10dB/Div, e um nível de referência de -45dBV.
Podemos verificar que o nível de densidade de ruído não ultrapassa os -45dB.
A seguir, na figura 68 é apresentada a forma de onda da corrente de ruído, que circula no condutor de protecção, mas agora adquirida no ponto TP.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 74
Figura 68 - Forma de onda e FFT da corrente no ponto TP.
Como podemos verificar pelas duas figuras anteriores, verificamos que não existe variação na corrente de ruído, que agora circula pelo condutor de terra e escoa-se para a terra junto ao auto-transformador em vez de o fazer junto ao motor. Esta configuração deveria produzir menor radiação de RF.
Com o mesmo esquema de ligações da figura 66, fomos adquirir novamente o sinal FAULT no interior do drive, para verificar a variação do ruído existente no seu interior. Assim, é apresentado na figura 69.
Figura 69 – Ruído no sinal de FAULT com o esquema da figura 66.
Podemos concluir que relativamente à figura 65, a variação é pequena, no sentido da diminuição esperada.
Henrique José Alves Teixeira FEUP - 2005
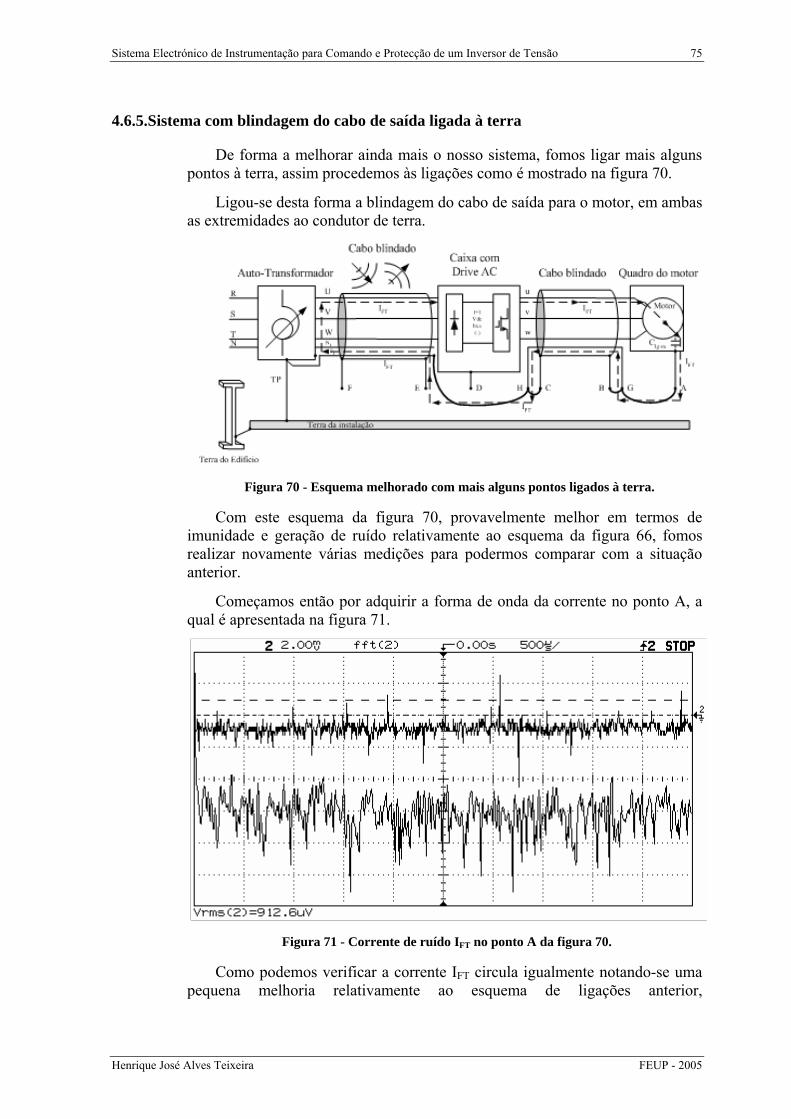
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 75
4.6.5.Sistema com blindagem do cabo de saída ligada à terra
De forma a melhorar ainda mais o nosso sistema, fomos ligar mais alguns pontos à terra, assim procedemos às ligações como é mostrado na figura 70.
Ligou-se desta forma a blindagem do cabo de saída para o motor, em ambas as extremidades ao condutor de terra.
Figura 70 - Esquema melhorado com mais alguns pontos ligados à terra.
Com este esquema da figura 70, provavelmente melhor em termos de imunidade e geração de ruído relativamente ao esquema da figura 66, fomos realizar novamente várias medições para podermos comparar com a situação anterior.
Começamos então por adquirir a forma de onda da corrente no ponto A, a qual é apresentada na figura 71.
Figura 71 - Corrente de ruído IFT no ponto A da figura 70.
Como podemos verificar a corrente IFT circula igualmente notando-se uma pequena melhoria relativamente ao esquema de ligações anterior,
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 76
provavelmente por alguma corrente circular pela blindagem sem chegar ao ponto A.
Outra das medidas realizadas foi medir a corrente IFT no ponto TP da figura 70.
Figura 72 - Corrente IFT no ponto TP da figura 70.
Como podemos verificar, e relativamente à figura 68 houve uma redução do nível de ruído, provavelmente devido à menor radiação.
Fomos também verificar o ruído existente no sinal de FAULT dentro do drive, o qual é apresentado na figura 73.
Figura 73 - Ruído no sinal de FAULT com o esquema da figura 70.
Pois podemos concluir que relativamente à figura 70, com este esquema de ligações, o sinal de FAULT, à saída do HCPL 2611 não sofreu alterações muito significativas.
Henrique José Alves Teixeira FEUP - 2005
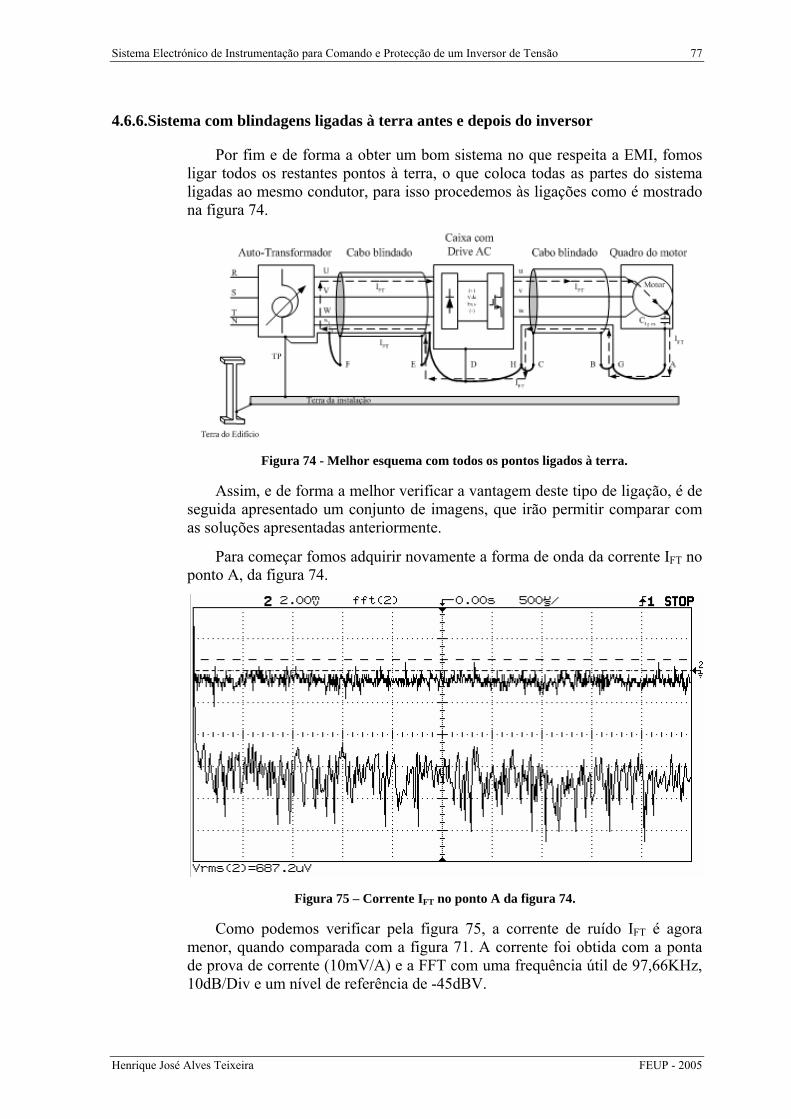
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 77
4.6.6.Sistema com blindagens ligadas à terra antes e depois do inversor
Por fim e de forma a obter um bom sistema no que respeita a EMI, fomos ligar todos os restantes pontos à terra, o que coloca todas as partes do sistema ligadas ao mesmo condutor, para isso procedemos às ligações como é mostrado na figura 74.
Figura 74 - Melhor esquema com todos os pontos ligados à terra.
Assim, e de forma a melhor verificar a vantagem deste tipo de ligação, é de seguida apresentado um conjunto de imagens, que irão permitir comparar com as soluções apresentadas anteriormente.
Para começar fomos adquirir novamente a forma de onda da corrente IFT no ponto A, da figura 74.
Figura 75 – Corrente IFT no ponto A da figura 74.
Como podemos verificar pela figura 75, a corrente de ruído IFT é agora menor, quando comparada com a figura 71. A corrente foi obtida com a ponta de prova de corrente (10mV/A) e a FFT com uma frequência útil de 97,66KHz, 10dB/Div e um nível de referência de -45dBV.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 78
Outras das medições realizadas foi adquirir a corrente IFT no ponto D, na ligação da caixa, onde está colocado o drive, à terra.
Figura 76 - Corrente IFT no ponto D da figura 74.
Ao efectuarmos esta ligação, da caixa à terra no ponto D, estamos a criar mais um caminho para a corrente de ruído de modo comum, criada dentro da caixa metálica, onde está toda a electrónica e o inversor. Na figura 76 está representada a corrente e a sua FFT, adquirida com a ponta de corrente nessa ligação.
A seguir é apresentada na figura 77, a corrente IFT medida no ponto TP.
Figura 77 - Corrente IFT no ponto TP da figura 74.
Como podemos verificar e comparando com a imagem da figura 72, estes valores são idênticos.
Outra medida realizada, foi no sinal de FAULT dentro do drive, o que pode
Henrique José Alves Teixeira FEUP - 2005
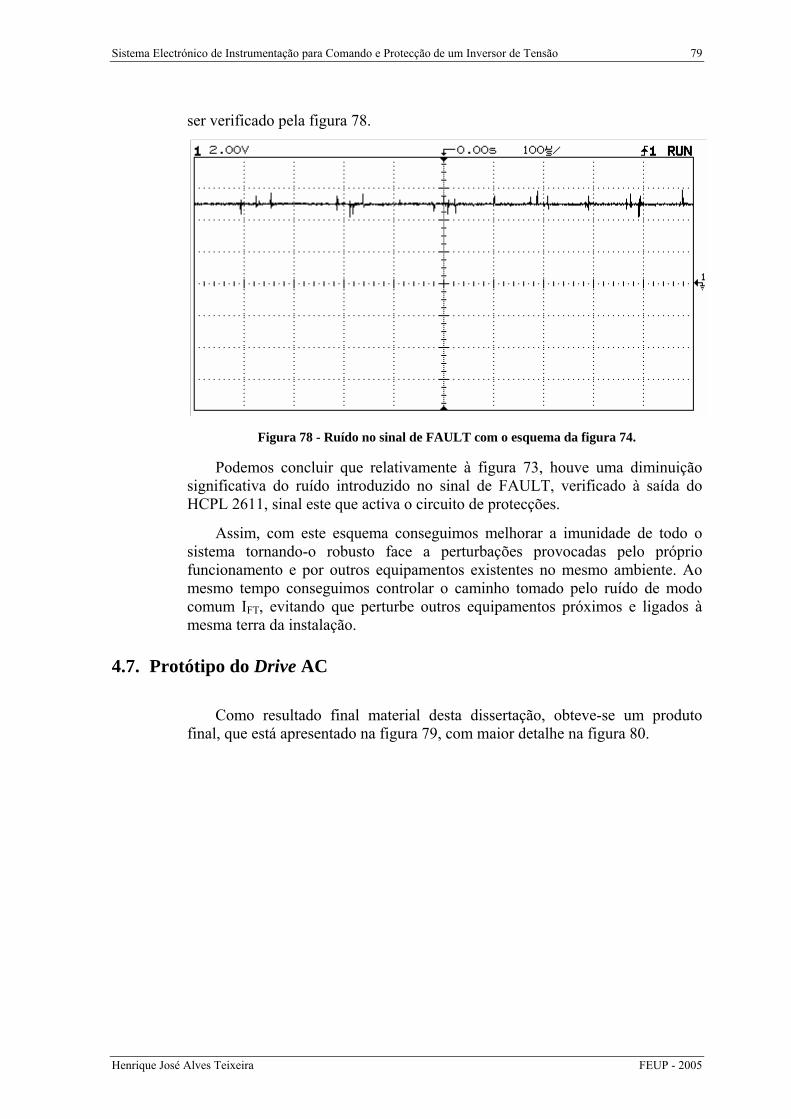
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 79
ser verificado pela figura 78.
Figura 78 - Ruído no sinal de FAULT com o esquema da figura 74.
Podemos concluir que relativamente à figura 73, houve uma diminuição significativa do ruído introduzido no sinal de FAULT, verificado à saída do HCPL 2611, sinal este que activa o circuito de protecções.
Assim, com este esquema conseguimos melhorar a imunidade de todo o sistema tornando-o robusto face a perturbações provocadas pelo próprio funcionamento e por outros equipamentos existentes no mesmo ambiente. Ao mesmo tempo conseguimos controlar o caminho tomado pelo ruído de modo comum IFT, evitando que perturbe outros equipamentos próximos e ligados à mesma terra da instalação.
4.7. Protótipo do Drive AC
Como resultado final material desta dissertação, obteve-se um produto final, que está apresentado na figura 79, com maior detalhe na figura 80.
Henrique José Alves Teixeira FEUP - 2005
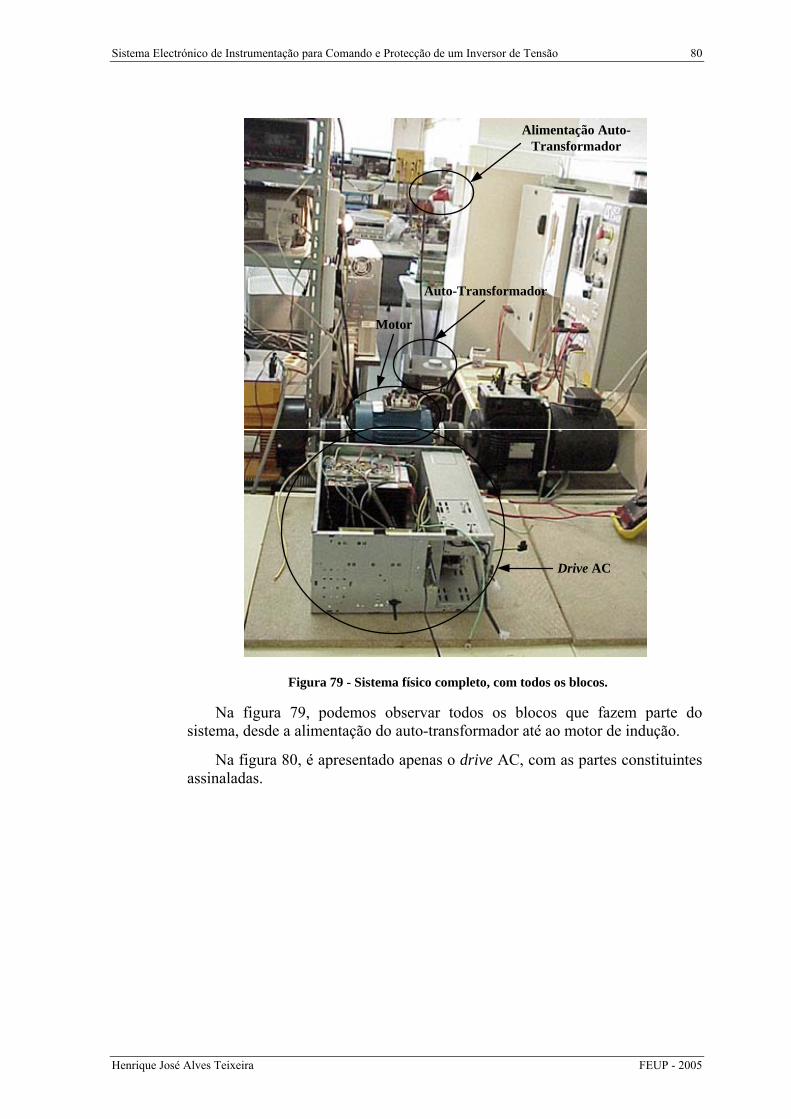
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 80
Alimentação Auto-Transformador
Auto-Transformador
Motor
Drive AC
Figura 79 - Sistema físico completo, com todos os blocos.
Na figura 79, podemos observar todos os blocos que fazem parte do sistema, desde a alimentação do auto-transformador até ao motor de indução.
Na figura 80, é apresentado apenas o drive AC, com as partes constituintes assinaladas.
Henrique José Alves Teixeira FEUP - 2005
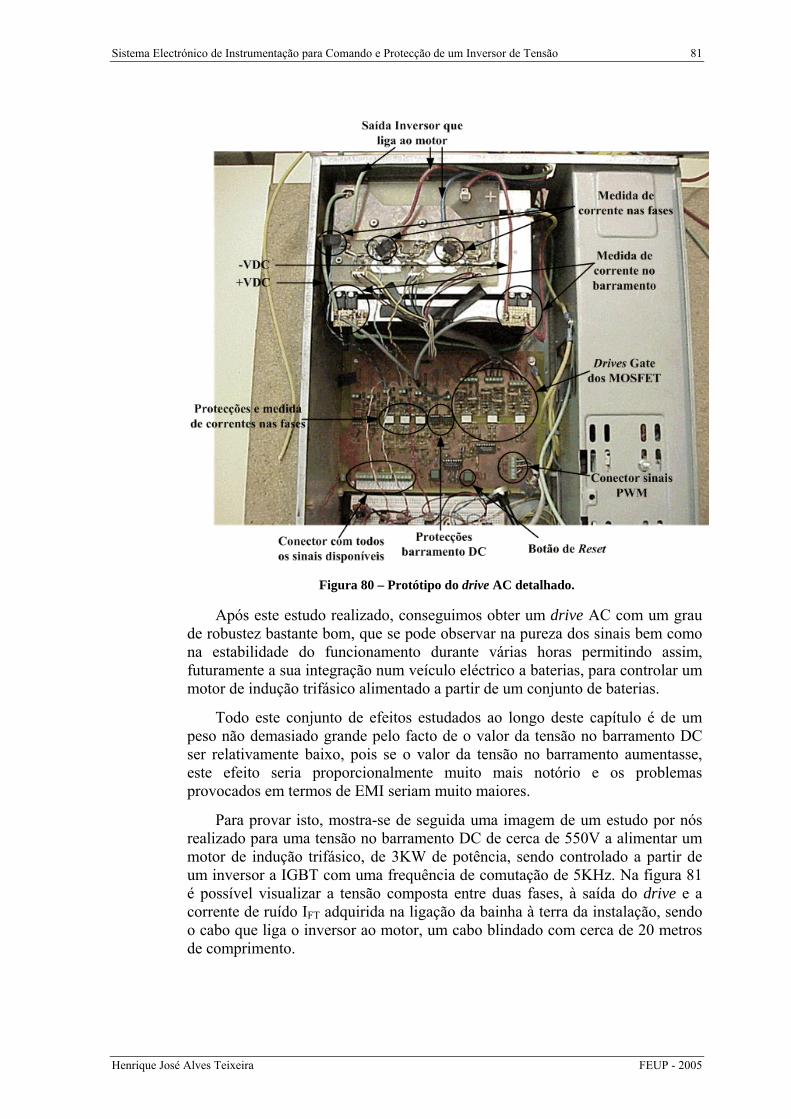
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 81
Figura 80 – Protótipo do drive AC detalhado.
Após este estudo realizado, conseguimos obter um drive AC com um grau de robustez bastante bom, que se pode observar na pureza dos sinais bem como na estabilidade do funcionamento durante várias horas permitindo assim, futuramente a sua integração num veículo eléctrico a baterias, para controlar um motor de indução trifásico alimentado a partir de um conjunto de baterias.
Todo este conjunto de efeitos estudados ao longo deste capítulo é de um peso não demasiado grande pelo facto de o valor da tensão no barramento DC ser relativamente baixo, pois se o valor da tensão no barramento aumentasse, este efeito seria proporcionalmente muito mais notório e os problemas provocados em termos de EMI seriam muito maiores.
Para provar isto, mostra-se de seguida uma imagem de um estudo por nós realizado para uma tensão no barramento DC de cerca de 550V a alimentar um motor de indução trifásico, de 3KW de potência, sendo controlado a partir de um inversor a IGBT com uma frequência de comutação de 5KHz. Na figura 81 é possível visualizar a tensão composta entre duas fases, à saída do drive e a corrente de ruído IFT adquirida na ligação da bainha à terra da instalação, sendo o cabo que liga o inversor ao motor, um cabo blindado com cerca de 20 metros de comprimento.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 82
Figura 81 - Formas de onda da tensão composta e da corrente IFT que circula na bainha do cabo que liga o inversor ao motor.
Na figura 81, em cima está apresentada a forma de onda da tensão composta, adquirida entre duas fases à saída do inversor com a ponta diferencial e uma atenuação de x200, em baixo é apresentada a forma de onda da corrente IFT adquirida com a ponta de corrente com uma atenuação de 10mV/A, na ligação da blindagem do cabo à terra da instalação que liga o inversor ao motor de indução, onde podemos ver que os picos atingem valores superiores a 5A.
Como pretendíamos demonstrar, se a tensão no barramento for muito grande, para a mesma frequência de comutação dos interruptores, apesar dos IGBT serem um pouco mais lentos que os MOSFET a entrar e a sair de condução, mas como o valor em termos de dv/dt é muito superior porque o valor da tensão no barramento é maior, mais notória é a geração de EMI, logo todas as técnicas utilizadas no âmbito desta dissertação deverão necessariamente ser aplicadas.
4.8. Conclusão
Neste capítulo foi nosso objectivo estudar e analisar os efeitos provocados pelo inversor no que diz respeito à geração de ruído de modo comum, introduzido na terra da instalação pelo inversor e observar os efeitos da utilização de cabos blindados.
Assim, no primeiro ponto começamos por explicar os efeitos e as consequências da existência de componentes parasitas no circuito. Falamos também sobre as possíveis formas de propagação do ruído de modo comum para a terra da instalação.
No ponto dois, fomos adquirir a medida da tensão e da corrente no barramento DC, analisando as suas formas de onda.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 83
No ponto três, medimos a tensão e a corrente fornecida pelo inversor ao motor, onde foram analisadas com algum detalhe as formas de onda.
No ponto quatro, procedemos à medida do valor da tensão de ruído, provocado pelo funcionamento do inversor, analisando-o detalhadamente.
O ponto cinco, teve por objectivo efectuar uma análise detalhada à corrente de ruído de modo comum, onde foram efectuadas diversas medidas e analisadas com detalhe, bem como as causas para o seu aparecimento. Procedemos à análise e formas de atenuação desses efeitos. Para isso recorremos à utilização de cabos blindados e formas de ligação das blindagens e partes do sistema à terra da instalação, de forma a criarmos caminhos por nós controlados para a propagação do ruído de modo comum que aparece no circuito tentando restringir assim área de actuação desse ruído a locais que nós conhecemos.
Por fim, foi apresentado o protótipo conseguido no âmbito da presente dissertação e feita uma comparação com um drive AC com uma tensão no barramento DC de aproximadamente 550V.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 84
Capítulo 5
Conclusões
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 85
5. Conclusão
Este trabalho teve como objectivo principal o estudo do accionamento das máquinas eléctricas e da problemática da geração de ruído electromagnético. Pois cada vez mais, quer na indústria quer noutros sectores se aumenta o recurso à utilização de motores ac em tarefas que requerem o controlo de velocidade. Até na indústria automóvel já são muito utilizados motores de indução ac, quer para a elevação de vidros eléctricos, direcção assistida, bombas de água, etc., o que com a crescente introdução deste tipo de motores irá estimular a necessária introdução de conversores modernos para o seu controlo, o que implicará uma maior quantidade de geração de ruído EMI e todos o problemas associados.
Um dos objectivos deste trabalho foi abordar um assunto de grande destaque nos dias que correm, que é o accionamento de motores para tracção de veículos eléctricos com tensões de barramento menos elevadas no caso de uso de baterias, principalmente no controlo de motores de indução trifásicos, mas também nos motores de indução monofásicos. Além deste assunto, e não de menor importância, existe a problemática da compatibilidade electromagnética (EMC), onde cada vez mais se tenta atenuar os efeitos da interferência electromagnética. Com o crescente aumento de estudos e trabalhos realizados sobre o controlo de motores de indução, com aplicação na tracção de veículos eléctricos, começaram a aparecer diversos problemas associados às formas de controlo dos referidos motores. Com especial destaque para a utilização de inversores de tensão, que recorrem a componentes semicondutores como por exemplo os MOSFET e os IGBT, os quais conseguem tempos de comutação das ordens das dezenas de nano segundos (frequência elevada), para tensões e correntes elevadas, o que provoca uma grande quantidade de ruído electromagnético. Este ruído veio tornar necessário a introdução de certas regras na utilização destes inversores, o que levou ao aparecimento de normas que impõem a sua redução, pois tem-se verificado que o ruído EMI, pode por em perigo a segurança das pessoas e dos equipamentos. Pois no caso dos veículos eléctricos, pode influenciar directamente nos meios de segurança do veículo, como seja o caso dos, ABS, air-bags, etc.
Apesar de na tracção dos veículos se recorrer mais frequentemente à utilização do motor de corrente contínua, pela sua simplicidade de controlo, nos dias que correm cada vez mais a tendência será a de substituir este pelo motor de indução, pois é de construção mais simples e sofre menor desgaste, ou seja, requer menor manutenção, apesar da maior complexidade no seu controlo.
De forma a melhor se compreender todo o trabalho desenvolvido, no capítulo um, começamos por fazer uma introdução ao inversor que pretendíamos construir e os efeitos associados à construção de um trabalho deste tipo, como seja a geração de ruído electromagnético. Abordamos o assunto relativo às directivas Europeias que regulamentam a compatibilidade electromagnética e a marcação “CE”.
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 86
No segundo capítulo, vimos como são criados diversos tipos de acoplamentos provocados pelo funcionamento do inversor que nos propusemos construir, como é o caso do acoplamento capacitivo e do acoplamento indutivo, bem como os problemas associados a esses tipos de acoplamento. Apresentamos diversas soluções para a redução dos efeitos abordados nos capítulos anteriores e provocados pelo inversor, soluções essas que tivemos em consideração ao longo do desenvolvimento do trabalho.
No terceiro capítulo, descrevemos todos os passos realizados durante a concepção e desenvolvimento do sistema, e descrevemos detalhadamente cada uma das partes que constituem o sistema final, referindo ainda os teste realizados com cada uma dessas partes individualmente, para depois passarmos à parte de integração.
No capítulo quatro, por fim apresentamos os resultados de todo o trabalho desenvolvido nos capítulos anteriores, onde podemos verificar os efeitos provocados pelo inversor e formas de redução do ruído gerado, utilizando técnicas abordadas ao longo da presente dissertação. É apresentado um conjunto alargado de figuras para permitirem ilustrar de uma forma detalhada todos os efeitos que advêm da utilização deste tipo de inversores. É também apresentado o protótipo conseguido no decorrer do trabalho. Por último e em termos de comparação é apresentada uma imagem adquirida utilizando um inversor a IGBT, com uma tensão de barramento de 550VDC, o que é um valor muito superior ao utilizado no âmbito desta dissertação, mas que permite comparar em termos do efeito da subida de tensão no barramento.
Assim, pode concluir-se que os principais objectivos foram alcançados, pois foi implementado um inversor, que permite o controlo bidireccional de um motor de indução trifásico, o qual permite com segurança controlar o motor, preparado mesmo para ser utilizado em ambientes laboratoriais onde mesmo que sejam cometidos alguns erros em relação a curto-circuitos, etc., as protecções que estão implementadas permitem retirar os MOSFET de condução, sem que ocorra o risco de destruição quer do motor, quer dos MOSFET, quer mesmo em termos de instalação eléctrica do edifício.
No respeitante à compatibilidade electromagnética foi possível verificar nos resultados dos ensaios que a utilização de cabos blindados em conjunto com uma concepção electrónica baseada em isolamento galvânico por meio de optoacopladores e a introdução de sistemas de protecção rápidos contra sobre-intensidades e curto-circuitos, permitiram aumentar a robustez do sistema e a sua imunidade ao ruído electromagneticamente gerado, até níveis de estabilidade considerados muito satisfatórios.
Em relação a trabalhos futuros está previsto:
• Aperfeiçoamento da implementação no sentido da compactação e criação de um protótipo pré-industrial miniaturizado;
• Estudo do comportamento com alimentação a baterias e caracterização energética;
Henrique José Alves Teixeira FEUP - 2005

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão 87
• Aperfeiçoamento do sistema de controlo para situações de condução que conduzam à recuperação de energia;
• Caracterização da radiação electromagnética em câmara semi-anecóica e conformidade com as directivas em vigor.
Henrique José Alves Teixeira FEUP - 2005
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão
Bibliografia
Bibliografia II

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão
Referências
[Skibinski, 1999] EMI Emissions of Modern PWM ac Drives, Gary L. Skibinski, Russel J.
Kerman, and Dave Schlegel, IEEE Industry Applications Magazine, November/December 1999.
[Ott, 1988] Noise Reduction Techniques in Electronic Systems, Second Edition,
Wiley, Henry W. Ott, 1988.
[Duff, 1988] A Handbook Series on Electromagnetic Interference and Compatibility, Interference Control Technologies, 1988.
[Ellis, 1998] Interferencias Eléctricas Handbook, Norman Ellis, Paraninfo, 1998.
[Kerkman] Effects of Parasitics on the Control of Voltage Source Inverters.
[Vicente Leite, 2004] Estimação de Estados, Parâmetros e Velocidade do Motor de Indução Trifásico com Metodologias de Identificação em Tempo Real, Vicente Leite, FEUP 2004.
[Vicente et al, 2004] Vicente Leite, R. Araújo, D. Freitas, "Full and Reduced Order Extended Kalman Filter for Speed Estimation in Induction Motor Drives: A Comparative Study", In proceedings of 35th IEEE Power Electronics Specialists Conference – PESC’04, pp 2293-2299, Aachen,20/6/2004.
[Teixeira, 1999] Interface para Condicionamento das Tensões e Correntes à Saída de Conversores de Frequência, H. Teixeira, V. Leite, R. Araújo e D. Freitas, 6ªJLEEE, 1999.
[Teixeira, 2001] Sistema Electrónico de Condicionamento e Processamento, em Tempo
Real, das Tensões e Correntes do Motor de Indução Trifásico Alimentado por Conversores de Frequência, H. Teixeira, V. Leite, R. Araújo e D. Freitas, 7ª JHLEE, 2001.
[Williams 1996] EMC for Product Designers, second edition. Newnes, Tim Williams,
1996.
[Duffin, 1990] Electricity and Magnetism, Fourth Edition, McGraw-Hill, W. J. Duffin, 1990.
[Mendiratta] Introdução ao Electromagnetismo, 2ª edição, Fundação Calouste Gulbenkian, S. K. Mendiratta, 1995.
Bibliografia III

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão
[Azevedo, 2004] Programação de um DSP para controlo de um motor de indução
trifásico, Pedro Azevedo, Relatório de Final de Curso, FEUP 2004.
[Barbosa, 2004] Relatório de Estágio de Prodep, José Barbosa, ESTiG – TRANSTEC, Bragança 2004.
[Williams, 2000] Using ferrites for interference suppression, Tim Williams, Elmac
Services, 2000.
[Mohan, 1995] Power Electronics, Converters, Applications and Design, Second Edition, Mohan, Undeland, Robbins, John Wiley & Sons, Inc. 1995.
Bibliografia IV
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão
Bibliografia
Electromagnetic Compatibility, Principles and Applications, Second Edition, Marcel Dekker, Inc. David A. Weston,2001.
Técnicas e Tecnologias em Instalações Eléctricas, L.M. Vilela Pinto, Certiel, 2000.
Power Electronics, Converters, Applications and Design, Second Edition, Mohan, Undeland, Robbins, John Wiley & Sons, Inc. 1995.
High Performance Film Resistors, General Catalog Edition 27.1, Caddock Electronics, Inc, 2001-2002.
Electromagnetic compatibility within Power Electronics, EPE 2003, Jacques Laeuffer, 2003.
Issues Surrounding the Installation and Application of IGBT Adjustable Speed AC Drives, Russ Kerkman, Gary Skibinski, Rockwell Automation, 2003
Electromagnetic compatibility in Power Electronics, László Tihanyi, IEEE Press, 1995.
Digital Signal Integrity, Prentice Hall PTR, Brian Young, 2001.
A real-time monitoring instrument of induction machines for an integrated teaching test bench, H. Teixeira, V. Leite, F. Casais, R. Araújo e D. Freitas, 8ºCLEEE, 2003.
An integrated test bench for research, study or demonstration of variable speed drives of induction motors, H. Teixeira, V. Leite, J. Batista, R. Araújo e D. Freitas, 8ºCLEEE, 2003.
Implemetação de um inversor de tensão trifásico, António Tomé, José Barbosa, ESTiG – IPB, 2003.
Modeling of a Power Electronic Converter for EMC in the Conduction Emission Frequency Band, Toshiji Kato, Seishun Lee and Kenichi Takeya, Electrical Engineering in Japan, Vol, 139, Nº 1, 2002.
Electro-Magnetic Interference and how to deal with it!, Tim Mann, Dec 2003.
Cahier Technique nº 149, Schneider Electric, J. Delaballe, December 2001.
Bibliografia I
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão
Variable Speed Drives and Motors, Technical Report nº 1, Second Edition, Gambica/Rema
Working Group.
Influence of Ground Plane Width on Reduction of Radiated Emissions from Printed Circuit Boards, Naoto Oka, Chiharu Miyazaki, Takeshi Uchida and Shuichi Nitta, Electronics and Communications in Japan, Part 2, Vol. 84, Nº 1, 2001.
Installation Considerations for Multi-Motor AC Drives & Filters Used In Metal Industry Applications, G. Skibinski, D. Dahl, K. Pierce, R. Freed and D. Gilbert, IEEE, 1998.
Electromagnetic Compatibility Issues In Industrial Equipment, Leopoldo Rossetto, Paolo Tenti and Alessandro Zuccato, IEEE 1999.
Automotive EMC Test Harnesses: Standard Lengths and Their Effect on Conducted Emissions, Martin O’Hara, James Colebrooke.
Automotive EMC Test Harnesses: Standard Lengths and Their Effect on Radiated Emissions, Martin O’Hara, James Colebrooke.
Continuous Simulation of System-Level Automotive EMC Problems, R. Neumayer, A. Stelzer, F. Haslinger, J. Held, F. Schinco, R. Weigel, IEEE 2003.
A PWM Rectifier/Inverter System Capable of Suppressing Both Harmonics and EMI, Satoshi Ogasawara, Masato Fujikawa and Hirofumi Akagi, Electrical Engineering in Japan, Vol 141, Nº 4, 2002.
Active Gate Drives For Motor Control Applications, Dorino O. Neacsu, IEEE PESC 2001.
Electromagnetic Performance of Innovative Lightweight Shields to Reduce Radiated Emissions From PCBs, Maria Sabrina Sarto, Sergio Di Michele and Peter Leerkamp, IEEE Transactions on Electromagnetic Compatibility, Vol. 44, Nº 2, May 2002.
Effects of Parasitics on the Control of Voltage Source Inverters, Russel J. KerKman, David Leggate, David W. Schlegel and Craig Winterhalter, IEEE Transactions on Power Electronics, Vol. 18, Nº 1, January 2003.
An Installer’s Guide to EMC practices and regulations for variable speed drives, Control Techniques.
EMC – Electromagnetic Compatability, Version 3.01 & 22-Jun-04.
Bibliografia II
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão
Anexos
Anexos III
Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão
Anexo A
Folhas de características
Anexos IV

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão
Anexo B Características do motor de indução trifásico, do osciloscópio e das pontas
de medida de tensão e medida de corrente utilizadas.
Motor de Indução trifásico em gaiola de esquilo:
• P= 1.1KW;
• F = 50Hz;
• N = 1400 rpm;
• T = 7,7 Nm;
• IN = 15,7A;
• Cosφ = 0,78.
Osciloscópio HP 54601B
• Largura de Banda 100MHz;
• Número de canais: 4;
• Resolução: 2mV a 5V/div;
• Base de tempo: 2ns a 5s/div.
Ponta de prova de Corrente 80i-100s AC/DC da FLUKE
• Sinais de saída:
o Gama 10A: 100mV/A;
o Gama 100A: 10mV/A;
• Largura de Banda: 0 – 100KHz;
• Tempo de subida ou descida: <4ms.
Ponta de prova diferencial DP120 da FLUKE
• Atenuação: 200x e 20x;
• Largura de Banda: 200x e 20x: DC a 20MHz;
• Tempo de subida: 200x e 20x 17,5ns.
Anexos V

Sistema Electrónico de Instrumentação para Comando e Protecção de um Inversor de Tensão
Anexo C Circuito eléctrico completo
Anexos VI


















