Relatório I - Mecanismos Articulados
17
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ PUC-PR CURSO DE ENGENHARIA MECÂNICA – NOTURNO MECANISMOS ARI ARMANDO TONET NETTO GABRIEL JAUCH GUILHERME ZANELLA RAMPONI RELATÓRIO I MECANISMOS ARTICULADOS CURITIBA 06/05/2014
-
Upload
gabriel-jauch -
Category
Documents
-
view
128 -
download
7
description
Relatório I - Mecanismos Articulados
Transcript of Relatório I - Mecanismos Articulados
-
PONTIFCIA UNIVERSIDADE CATLICA DO PARAN PUC-PR
CURSO DE ENGENHARIA MECNICA NOTURNO
MECANISMOS
ARI ARMANDO TONET NETTO
GABRIEL JAUCH
GUILHERME ZANELLA RAMPONI
RELATRIO I
MECANISMOS ARTICULADOS
CURITIBA
06/05/2014
-
1 - INTRODUO E OBJETIVOS
Mecanismos so, por definio, ramos de projetos de mquinas
relacionados ao estudo cinemtico e cintico de sistemas articulados,
excntricos, engrenagens e trens de engrenagens. So eles os responsveis
pelas transmisses de movimento e transformaes de movimento, por
exemplo, movimento de rotao em linear.
Os mecanismos esto presentes em inmeras aplicaes de
engenharia, desde simples objetos, como por exemplo um canivete com suas
articulaes, at maravilhas da engenharia, como pontes levadias.
O objetivo desta prtica relacionar e comparar o comportamento
terico visto em sala de aula, com o comportamento prtico atravs de quatro
mecanismos didticos. Com o auxlio de grficos e tabelas (software Excel)
faremos os estudos cinemticos relativos a cada mecanismo e analisaremos
seu deslocamento, velocidade e acelerao.
1.1 - MECANISMO CURSOR BIELA MANIVELA
O mecanismo cursor manivela utilizado em mquinas e motores
trmicos, como motores de combusto, bombas, compressores e locomotivas.
A figura 1 mostra o mecanismo didtico usado no laboratrio para realizao
dos experimentos, onde o ponto A representa o cursor, o segmento AB
representa a biela e o segmento BC representa a manivela.
Figura 1: Representao mecanismo cursor biela manivela.
-
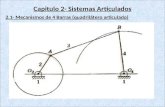
1.2 - MECANISMO SCOTT-RUSSELL (TRAADOR DE LINHA RETA)
O mecanismo de Scott-Russel converte o movimento linearem em uma
direo para outra direo.O ponto A move-se verticalmente e ponto B se move
horizontalmente. O movimento relativo em ngulos diferentes de 90 graus so
possveis por simples rotao do guia fixo.
Figura 2: Representao traador de linha reta.
1.3 MECANISMO SLOTTED LINK (GARFO ESCOCS)
O mecanismo de garfo escocs capaz de gerar movimento harmnico
simples, fazendo com que o movimento feche seu ciclo em 180 graus, este tipo
de mecanismo utilizado em maquinas de lavar roupa industrial, agitadores,
por exemplo, sendo tambm empregado para a conduo das bombas e
compresso
-
Figura 3: Representao mecanismo garfo escocs.
1.4 - MECANISMO CRANK AND SLOTTED LEVER QUICK RETURN MOTION (RETORNO RPIDO)
Caracterizam-se por possurem duas fases de movimento para uma
dada velocidade angular constante, utilizado quando se deseja baixa
velocidade de corte e rpido retorno. O objetivo nesse mecanismo que a
razo entre o ngulo de curso de corte () e o ngulo de retorno () seja a
mxima possvel. Este mecanismo utilizado largamente em mquinas
operatrizes.
Figura 4: Representao mecanismo garfo escocs
-
2 -MATERIAIS E MTODOS
2.1 - MECANISMO CURSOR MANIVELA
Para a realizao da prtica, foram utilizados os seguintes materiais:
1. Painel mecanismo cursor manivela;
2. Rgua com comprimento de 30 cm;
3. Transferidor de grau 0-360;
4. Lapiseira;
5. Folha A3;
Na prtica de laboratrio foram utilizados modelos representando os
seguintes mecanismos:
Figura 5: Representao esquemtica do mecanismo cursor manivela.
Onde:
R: Comprimento da manivela (Entrada do movimento);
L: Biela (Transmite o movimento);
E nas equaes a seguir:
x: Deslocamento (m);
v: Velocidade (m/s);
: Velocidade Angular (rad/s);
a: Acelerao (cm/s);
: Acelerao angular (rad/s);
-
: ngulo ().
O modelo foi deslocado de 0 a 180 graus, marcando-se neste intervalo
dezenove pontos relacionando os ngulos e os deslocamentos. Foram
utilizados um transferidor e uma rgua para determinar a relao entre os
ngulos e os deslocamentos. Estes dados relacionados na tabela 1 foram
substitudos nas equaes a abaixo.
Para calcular o deslocamento em x, as seguintes equaes foram
utilizadas:
L
RsenLRLRx
2)(1cos
Equao 1: Equao deslocamento.
Para simplificar a equao acima e as seguintes derivaes ser usada
a Srie Binomial. Para a equao do deslocamento ser utilizada a srie com
dois e trs termos. J para velocidade e acelerao ser utilizada a srie com
apenas dois termos.
Srie Binomial:
21])1[(
22/1
Logo,
2
)cos1(2
senL
RRx
Equao 2: Deslocamento com dois termos da srie Binomial.
43
42
8
2)cos1( sen
L
Rsen
L
RRx
Equao 3: Deslocamento com trs termos da srie Binomial.
Prosseguindo com as dedues matemticas o deslocamento
-
aproximado de x (equao 2) foi derivado em relao ao tempo para se obter a
velocidade, conforme equao 4.
)2(.2.
senL
RsenRv
Equao 4: Velocidade do mecanismo cursor manivela.
A equao da acelerao (equao 5) obtida derivando a equao da
velocidade em relao ao tempo utilizando acelerao angular (..
) igual zero,
temos a seguinte equao tendo velocidade angular constante em 5 rad/s.
)2(coscos2.22.
L
RRa
Equao 5: Acelerao do mecanismo cursor biela manivela.
2.2 MECANISMO SCOTT-RUSSELL (TRAADOR DE LINHA RETA)
Para a realizao da prtica foram utilizados os seguintes materiais:
1. Painel mecanismo Scott-Russell;
2. Rgua com comprimento de 30cm;
3. Transferidor de grau 0-360;
4. Lapiseira;
5. Folha A3;
Na prtica de laboratrio foi utilizado modelo didtico representando o seguinte
mecanismo:
Figura 5:
Representao para o mecanismo Scott-Russell.
-
O modelo didtico foi deslocado de 0 a 40 graus, sendo marcados nesse
intervalo treze pontos relacionando os ngulos e os deslocamentos nas
posies verticais e horizontais. Foi utilizado um transferidor e uma rgua para
medi-los. Aps os dados serem organizados (Tabela 2), foram substitudos nas
equaes a abaixo. Foi arbitrada a velocidade angular constante e igual 5
rad/s.
Para calcular o deslocamento em x, a seguinte equao foi utilizada:
)2180cos(22
22
LL
x
Equao 6: Deslocamento em x.
Para calcular o deslocamento em y, a seguinte equao foi deduzida:
Lseny
Equao 7: Deslocamento em y.
2.3 - MECANISMO SLOTTED LINK (GARFO ESCOCS)
Para a realizao da prtica foram utilizados os seguintes materiais:
1. Painel mecanismo Slotted link;
2. Rgua com comprimento de 30cm;
3. Transferidor de grau 0-360;
4. Lapiseira;
5. Folha A3;
Na prtica de laboratrio foi utilizado modelo didtico representando o seguinte
mecanismo mostrado na figura 3
O modelo didtico foi deslocado de 0 a 180 graus com
incrementos de 10 graus. Foi utilizado um transferidor e uma rgua para medi-
los. Aps os dados serem organizados (Tabela 3), foram substitudos na
-
equao a abaixo. Foi arbitrada a velocidade angular constante e igual 4
rad/s.
Para calcular o deslocamento em x, a seguinte equao foi
utilizada:
cosRRx
Equao 8: Soluo do deslocamento.
2.4 - MECANISMO CRANK AND SLOTTED LEVER QUICK RETURN
MOTION (RETORNO RPIDO)
Para a realizao da prtica foram utilizados os seguintes materiais:
1. Painel mecanismo Crank and Slotted Laver Quick Return Motion;
2. Rgua com comprimento de 30cm;
3. Lapiseira;
4. Transferidor de grau 0-360;
5. Folha A3;
Na prtica de laboratrio foi utilizado modelo didtico representando o seguinte
mecanismo:
Figura 6: Representao esquemtica do mecanismo retorno rpido.
-
O modelo didtico foi deslocado da extremidade direita para a esquerda
e marcado os pontos nestas posies. Foi utilizado um transferidor e uma
rgua para medi-los. Aps os dados serem coletados, estes foram substitudos
na equao abaixo.
Para calcular a razo de tempos, a seguinte equao foi utilizada:
Equao 9: Razo de tempos
Onde:
= ngulo de avano
=ngulo de retorno
3 - RESULTADOS
Abaixo se encontram os resultados obtidos para os mecanismos
articulados cursor biela manivela, traador de linha reta, garfo escocs e
retorno rpido respectivamente.
3.1 - MECANISMO CURSOR MANIVELA
Tabela 1: Dados obtidos para o mecanismo cursor manivela.
-
Figura 7: Deslocamento do cursor em funo do tempo para o mecanismo cursor manivela.
0.00000
1.00000
2.00000
3.00000
4.00000
5.00000
6.00000
7.00000
8.00000
9.00000
10.00000
DES
LOC
AM
ENTO
(cm
)
TEMPO (s)
Deslocamento X Tempo
TERICO (2 TERMOS)
TERICO (3 TERMOS)
EXPERIMENTAL
DESLOCAMENTO VELOCIDADE ACELERAO
TERICO EXPERIMENTAL TERICO EXPERIMENTAL TERICO EXPERIMENTAL
(rad) () t (s) x (cm)* x (cm)** x (cm) v (cm/s) v (cm/s) a (cm/s) a (cm/s) 0.00000 0 0.000 0.00000 0.00000 0.0 0.00000 0.00 187.50000 0.0 0.15708 9 0.031 0.09215 0.09210 0.1 5.84222 3.18 182.90207 101.3 0.33161 19 0.066 0.40490 0.40402 0.4 11.98709 8.59 167.44049 155.0 0.50615 29 0.101 0.92070 0.91639 0.9 17.42054 14.32 142.44742 164.1 0.68068 39 0.136 1.60933 1.59707 1.5 21.84643 17.19 110.13773 82.1 0.85521 49 0.171 2.43169 2.40634 2.4 25.05691 25.78 73.30906 246.2 1.02974 59 0.206 3.34323 3.30105 3.3 26.94760 25.78 35.03779 0.0 1.20428 69 0.241 4.29763 4.23828 4.2 27.52158 25.78 -1.65056 0.0 1.37881 79 0.276 5.25044 5.17791 5.1 26.88197 25.78 -34.09787 0.0 1.55334 89 0.311 6.16236 6.08428 6.0 25.21431 25.78 -60.28038 0.0 1.72788 99 0.346 7.00158 6.92723 6.9 22.76085 25.78 -78.99534 0.0 1.91986 110 0.384 7.81388 7.75296 7.7 19.47489 20.83 -90.63030 -128.9 2.09440 120 0.419 8.43750 8.39355 8.4 16.23798 20.05 -93.75000 -22.4 2.23402 128 0.447 8.85451 8.82438 8.9 13.63592 17.90 -92.07780 -76.9 2.40855 138 0.482 9.27539 9.25973 9.3 10.51250 11.46 -86.36007 -184.7 2.58309 148 0.517 9.59126 9.58510 9.6 7.63052 8.59 -78.60782 -82.1 2.77507 159 0.555 9.82844 9.82715 9.8 4.77713 5.21 -70.25100 -88.2 2.98451 171 0.597 9.96903 9.96898 9.9 1.97951 2.39 -64.02001 -67.4 3.14159 180 0.628 10.00000 10.00000 10.0 0.00000 3.18 -62.50000 25.3
* Com dois termos da srie Binomial ** Com trs termos da srie Binomial
-
Figura 8: Velocidade do cursor em funo do tempo para o mecanismo cursor manivela.
Figura 9: Acelerao do cursor em funo do tempo para o mecanismo cursor manivela.
0.00000
5.00000
10.00000
15.00000
20.00000
25.00000
30.00000
VEL
OC
IDA
DE
(cm
/s)
TEMPO (s)
Velocidade X Tempo
TERICO
EXPERIMENTAL
-250.00000
-200.00000
-150.00000
-100.00000
-50.00000
0.00000
50.00000
100.00000
150.00000
200.00000
250.00000
300.00000
AC
ELER
A
O
(cm
/s)
TEMPO (s)
Acelerao X Tempo
TERICO
EXPERIMENTAL
-
3.2 - MECANISMO SCOTT-RUSSELL (TRAADOR RETA)
Tabela 2: Dados obtidos para o mecanismo traador de linha reta.
DESLOCAMENTO
TERICO EXPERIMENTAL
() (rad) t (s) x (cm) y (cm) x (cm) y (cm)
0 0.00000 0.000 30.00000 0.00000 30.0 0.0
4 0.06981 0.014 29.92692 2.09269 29.9 2.2
7 0.12217 0.024 29.77638 3.65608 29.7 4.0
11 0.19199 0.038 29.44882 5.72427 29.5 5.5
14 0.24435 0.049 29.10887 7.25766 29.1 7.4
18 0.31416 0.063 28.53170 9.27051 28.5 9.3
22 0.38397 0.077 27.81552 11.23820 27.8 11.3
25 0.43633 0.087 27.18923 12.67855 27.1 12.9
29 0.50615 0.101 26.23859 14.54429 26.3 14.5
31 0.54105 0.108 25.71502 15.45114 25.5 15.7
35 0.61087 0.122 24.57456 17.20729 24.5 17.3
38 0.66323 0.133 23.64032 18.46984 23.8 18.3
40 0.69813 0.140 22.98133 19.28363 22.9 19.5
Figura 10: Deslocamento horizontal do cursor em funo do tempo para o mecanismo traador
e linha reta.
0.00000
5.00000
10.00000
15.00000
20.00000
25.00000
30.00000
35.00000
DES
LOC
AM
ENTO
(cm
)
TEMPO (s)
Deslocamento Horizontal X Tempo
TERICO
EXPERIMENTAL
-
Figura 11: Deslocamento vertical do cursor em funo do tempo para o mecanismo traador de
linha reta.
3.3 - MECANISMO SLOTTED LINK (GARFO ESCOCS)
Tabela 3: Dados obtidos para o mecanismo traador de linha reta.
DESLOCAMENTO
TERICO EXPERIMENTAL
() (rad) t (s) x (cm) x (cm)
0 0.00000 0.000 0.00000 0.0
10 0.17453 0.044 0.07596 0.1
20 0.34907 0.087 0.30154 0.3
30 0.52360 0.131 0.66987 0.7
40 0.69813 0.175 1.16978 1.1
50 0.87266 0.218 1.78606 1.7
60 1.04720 0.262 2.50000 2.4
70 1.22173 0.305 3.28990 3.2
80 1.39626 0.349 4.13176 4.0
90 1.57080 0.393 5.00000 4.9
100 1.74533 0.436 5.86824 5.8
110 1.91986 0.480 6.71010 6.6
120 2.09440 0.524 7.50000 7.4
130 2.26893 0.567 8.21394 8.1
140 2.44346 0.611 8.83022 8.8
150 2.61799 0.654 9.33013 9.3
160 2.79253 0.698 9.69846 9.7
170 2.96706 0.742 9.92404 9.9
180 3.14159 0.785 10.00000 10.0
0.00000
5.00000
10.00000
15.00000
20.00000
25.00000
DES
LOC
AM
ENTO
(cm
)
TEMPO (s)
Deslocamento Vertical X Tempo
TERICO
EXPERIMENTAL
-
Figura 12: Deslocamento do cursor em funo do tempo para o mecanismo garfo escocs.
3.4 - MECANISMO CRANK AND SLOTTED LEVER QUICK RETURN
MOTION (RETORNO RPIDO)
Substituindo os valores de =240 e =120 na equao 9 obtemos a
razo de tempo igual 2.
4 - ANLISE DOS RESULTADOS
4.1 - MECANISMO CURSOR MANIVELA
H uma boa relao entre os deslocamentos tericos e experimental (fig.
7), j na curva de velocidade (fig. 8) consegue-se perceber maior diferena
entre os resultados. fcil perceber que essa curva tem forma de uma
parbola com velocidade maior nos ngulos mais prximos de 90 e
logicamente tem velocidade nula nas extremidades (0 e 180) para inverter o
0.00000
2.00000
4.00000
6.00000
8.00000
10.00000
12.00000 D
ESLO
CA
MEN
TO (
cm)
TEMPO (s)
Deslocamento X Tempo
TERICO
EXPERIMENTAL
-
sentido do cursor. Na acelerao (fig. 9) a discrepncia entre a curva terica e
prtica fica bem mais visvel, porm ainda possvel perceber a tendncia. A
diferena pode ser explicada pela folga presente no modelo do mecanismo
utilizado no experimento.
4.2 - MECANISMO SCOTT-RUSSELL (TRAADOR DE LINHA RETA)
Ao observar as figuras 10 e 11, nota-se que a diferena dos dados
obtidos pelo experimento quando comparado com os calculados muito
pequena e que enquanto o deslocamento horizontal diminui, o vertical
aumenta. Isso devido a origem ser no ponto C (fig. 2). Tambm possvel
observar que o deslocamento no eixo x varia menos que em y, isso se deve
porque variamos o ngulo de 0 at 40. E, a projeo, para ngulos pequenos,
varia muito menos no eixo dos cossenos do que no dos senos.
4.3 - MECANISMO SLOTTED LINK (GARFO ESCOCS)
Ao observar a figura 12, nota-se que o modelo matemtico representou
muito bem o que foi obtido na prtica, pois os pontos coletados no laboratrio
se encontram prximos curva.
4.3 - MECANISMO CRANK AND SLOTTED LEVER QUICK RETURN
MOTION (RETORNO RPIDO)
A teoria diz que a obteno de tempos pela razo entre alfa e beta for
maior que um, o mecanismo ter avano mais lento que o retorno. Como se
obteve a razo igual 2 a prtica confirma a teoria.
-
5 - CONCLUSO
Conclui-se que os resultados obtidos experimentalmente se
aproximaram dos valores tericos. A divergncia apresentada pode ser
explicada pela folga das articulaes que facilmente observada com o
manuseio dos equipamentos didticos presentes no laboratrio. Outro fator a
ser levado em considerao para explicar esta diferena o nmero de pontos
coletados. Para ser mais preciso seria ideal obter um nmero muito maior de
dados, porm se demoraria muito se tornando invivel. Para fins didticos o
experimento foi muito bem aproveitado relacionando a teoria, estudada em sala
de aula, com a prtica.
6 - BIBLIOGRAFIA
MABIE, Hamilton H.; Mecanismos; Rio de Janeiro, RJ: Editora Livros
Tcnicos e Cientficos; 1980.