
Quantifica o de Incertezas em Vibra es Induzidas por V rtices
95
QUANTIFICAÇÃO DE INCERTEZAS EM VIBRAÇÕES INDUZIDAS POR VÓRTICES Antonio Droescher Sandri Dissertação de Mestrado apresentada ao Programa de Pós-graduação em Engenharia Mecânica, COPPE, da Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Mestre em Engenharia Mecânica. Orientador: Fernando Alves Rochinha Rio de Janeiro Novembro de 2010
Transcript of Quantifica o de Incertezas em Vibra es Induzidas por V rtices

QUANTIFICAÇÃO DE INCERTEZAS EM VIBRAÇÕES INDUZIDAS POR
VÓRTICES
Antonio Droescher Sandri
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Mecânica, COPPE, da Universidade Federal
do Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre
em Engenharia Mecânica.
Orientador: Fernando Alves Rochinha
Rio de Janeiro
Novembro de 2010

QUANTIFICAÇÃO DE INCERTEZAS EM VIBRAÇÕES INDUZIDAS POR
VÓRTICES
Antonio Droescher Sandri
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO
ALBERTO LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE
ENGENHARIA (COPPE) DA UNIVERSIDADE FEDERAL DO RIO DE
JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A
OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM ENGENHARIA
MECÂNICA.
Examinada por:
Prof. Fernando Alves Rochinha, D.Sc.
Prof. Daniel Alves Castello, D.Sc.
Prof. Luis Volnei Sudati Sagrilo, D.Sc.
Prof. Ricardo Franciss, D.Sc.
RIO DE JANEIRO, RJ – BRASIL
NOVEMBRO DE 2010

Sandri, Antonio Droescher
Quantificação de Incertezas em Vibrações Induzidas por
Vórtices/Antonio Droescher Sandri. – Rio de Janeiro:
UFRJ/COPPE, 2010.
XII, 83 p.: il.; 29,7cm.
Orientador: Fernando Alves Rochinha
Dissertação (mestrado) – UFRJ/COPPE/Programa de
Engenharia Mecânica, 2010.
Referências Bibliográficas: p. 74 – 83.
1. Quantificação de Incertezas. 2. Vibrações Induzidas
por Vórtices. 3. Método de Colocação Estocástica. I.
Rochinha, Fernando Alves. II. Universidade Federal do Rio
de Janeiro, COPPE, Programa de Engenharia Mecânica.
III. Título.
iii

"Engineering is the art of
modeling materials we do not
wholly understand, into shapes
we cannot precisely analyze, so
as to withstand forces we cannot
precisely assess, in such a way
that the public has no reason to
suspect the extent of our
ignorance."
Dr. A. R. Dykes
iv

Agradecimentos
Agradeço ao Programa de Pós-Graduação em Engenharia Mecânica (PEM) do Ins-
tituto Alberto Luiz Coimbra de Pós-graduação e Pesquisa de Engenharia (COPPE-
UFRJ) pela oportunidade de participar de um curso que vem obtendo conceito má-
ximo pela avaliação Coordenação de Aperfeiçoamento de Pessoal de Nível Superior
(CAPES-MEC).
Agradeço ao Programa Demanda Social (DS) da CAPES pela bolsa na modali-
dade mestrado.
Agradeço à Fundação de Amparo à Pesquisa do Estado do Rio de Janeiro (FA-
PERJ) pela bolsa especial na modalidade mestrado através do Programa Bolsa Nota
10.
Agradeço aos servidores e professores do PEM por proporcionarem um ambiente
favorável ao desenvolvimento acadêmico e pessoal, em especial ao Prof. Fernando
Alves Rochinha pela amizade e orientação acadêmica.
Agradeço aos meus colegas de curso e de laboratório que procuram seu nome
por aqui, mesmo sabendo que não irão encontrar. Muito obrigado por terem feito
parte dessa minha experiência. Já dizia o C. Chaplin: "Cada pessoa que passa em
nossa vida passa sozinha, e não nos deixa só, porque deixa um pouco de si e leva
um pouquinho de nós".
Finalmente, agradeço à minha família não só pelo apoio, mas também pela com-
preensão e tolerância durante a minha ausência.
Muito obrigado.
v

Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
QUANTIFICAÇÃO DE INCERTEZAS EM VIBRAÇÕES INDUZIDAS POR
VÓRTICES
Antonio Droescher Sandri
Novembro/2010
Orientador: Fernando Alves Rochinha
Programa: Engenharia Mecânica
Os recentes desenvolvimentos na área da Computação de Alto Desempenho vem
estabelecendo as simulações numéricas como uma ferramenta eficaz e efetiva para a
análise de problemas reais de Engenharia. Entretanto, a credibilidade nos resulta-
dos fica sujeita a interpretações de analistas, uma vez que o processo de modelagem
de sistemas físicos carrega erros e incertezas inerentes. A Quantificação de Incer-
tezas propõe uma metodologia para auxiliar os analistas na tarefa de determinar
sistematicamente a validade das simulações numéricas.
O presente trabalho, que se integra a área de Quantificação de Incertezas re-
centemente nucleada no PEM, analisa um modelo para predição de Vibrações In-
duzidas por Vórtices (VIV). O fenômeno de VIV vem recebendo atenção especial
por se apresentar como um carregamento importante nas estruturas para explora-
ção de hidrocarbonetos em lâmina de água ultraprofunda. A análise leva em conta
incertezas nas variáveis de entrada do modelo de predição. O problema é então for-
mulado através da abordagem probabilística onde as incertezas são caracterizadas
por uma função densidade de probabilidade. O método de Colocação Estocástica
(CE) é empregado para propagar as incertezas através do modelo. Os resultados
são apresentados na forma de funções densidade de probabilidade para a amplitude
de vibração e velocidades na zona de sincronização.
vi

Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
UNCERTAINTY QUANTIFICATION IN VORTEX INDUCED VIBRATION
Antonio Droescher Sandri
November/2010
Advisor: Fernando Alves Rochinha
Department: Mechanical Engineering
Recent developments in the subject of High Performance Computing has estab-
lished numerical simulations as an efficient and effective tool for the analysis of
real Engineering problems. However, the credibility in the results is subjected to
the analysts’s interpretation, as the process of modeling physical systems inherently
carries errors and uncertainty. The Uncertainty Quantification proposes a method-
ology to assist the analysts in the task of systematically determining the validity of
the numerical simulations.
This work, which integrates the newly established area of Uncertainty Quantifi-
cation in PEM, examines a model for predicting Vortex Induced Vibrations (VIV).
The phenomenon of VIV is receiving special attention by presenting itself as an
important structural load for hydrocarbon exploration in ultradeep water depth.
The analysis takes into account uncertainties in the input variables of the prediction
model. The problem is then formulated through the probabilistic approach where
the uncertainties are characterized by a probability density function. The Stochastic
Collocation method is used to propagate uncertainties through the model. Results
are presented as probability density functions for the amplitude of vibration and
free stream velocity in the range of synchronization.
vii

Sumário
Lista de Figuras x
Lista de Tabelas xii
1 Introdução 1
1.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Revisão da literatura . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Vibrações Induzidas por Vórtices . . . . . . . . . . . . . . . . 3
1.2.2 Quantificação de Incertezas . . . . . . . . . . . . . . . . . . . 4
1.2.3 Quantificação de Incertezas em Vibrações Induzidas por Vórtices 5
1.3 Objetivos do presente trabalho . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Apresentação dos capítulos . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Vibrações Induzidas por Vórtices 7
2.1 Fluidodinâmica ao redor de um cilindro circular fixo . . . . . . . . . . 8
2.1.1 Forças resultantes . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Dinâmica da interação fluido-estrutura . . . . . . . . . . . . . . . . . 14
2.2.1 Estruturas amortecidas . . . . . . . . . . . . . . . . . . . . . . 14
2.3 VIV em um cilindro circular . . . . . . . . . . . . . . . . . . . . . . . 16
2.4 Métodos de predição . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4.1 Modelos fenomenológicos . . . . . . . . . . . . . . . . . . . . . 21
2.4.2 Mecânica dos Fluidos Computacional . . . . . . . . . . . . . . 22
2.4.3 Validação dos modelos de predição para VIV . . . . . . . . . . 23
2.4.4 Métodos experimentais . . . . . . . . . . . . . . . . . . . . . . 24
3 Quantificação de Incertezas 25
3.1 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1.1 Análise da Quantificação de Incertezas . . . . . . . . . . . . . 29
3.2 Modelos de sistemas mecânicos . . . . . . . . . . . . . . . . . . . . . 31
3.2.1 Validação de modelos . . . . . . . . . . . . . . . . . . . . . . . 32
3.3 Fontes não-determinísticas . . . . . . . . . . . . . . . . . . . . . . . . 32
3.3.1 Caracterização de funções densidade de probabilidade . . . . . 33
viii

3.4 Métodos de propagação de incertezas . . . . . . . . . . . . . . . . . . 35
4 Análise crítica de modelos fenomenológicos para predição de VIV 37
4.1 Modelo de interação fluido-estrutura . . . . . . . . . . . . . . . . . . 38
4.1.1 Acoplamento fluido-estrutura . . . . . . . . . . . . . . . . . . 39
4.1.2 Valores adotados para as variáveis do modelo . . . . . . . . . 41
4.1.3 Quantidades de interesse . . . . . . . . . . . . . . . . . . . . . 42
4.2 Modelo estocástico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.3 Método de Colocação Estocástica . . . . . . . . . . . . . . . . . . . . 44
4.4 Quantificação de Incertezas em Vibrações Induzidas por Vórtices . . . 47
4.5 Implementação numérica . . . . . . . . . . . . . . . . . . . . . . . . . 49
5 Resultados e Discussões 51
5.1 Desempenho computacional . . . . . . . . . . . . . . . . . . . . . . . 52
5.1.1 Comportamento na integração temporal . . . . . . . . . . . . 53
5.1.2 Reprodução do comportamento experimental . . . . . . . . . . 55
5.1.3 Avaliação do método de CE . . . . . . . . . . . . . . . . . . . 57
5.2 Análise crítica do modelo . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.2.1 Incerteza associada à velocidade de corrente . . . . . . . . . . 59
5.2.2 Incerteza associada aos parâmetros de ajuste do modelo κ e ε 63
6 Conclusões 72
Referências Bibliográficas 74
ix

Lista de Figuras
1.1 Estruturas marinhas sujeitas as VIV. . . . . . . . . . . . . . . . . . . 2
2.1 Escoamento ao redor de um cilindro circular fixo. . . . . . . . . . . . 8
2.2 Regiões de escoamento próximas ao cilindro circular. . . . . . . . . . 9
2.3 Visualização da esteira de von Kármán. . . . . . . . . . . . . . . . . . 9
2.4 Mecanismo de desprendimento de vórtices. . . . . . . . . . . . . . . . 10
2.5 Número de Strouhal para um cilindro circular fixo. . . . . . . . . . . 11
2.6 Média temporal do coeficiente de arrasto. . . . . . . . . . . . . . . . . 12
2.7 Envelope de resultados para os coeficientes fluidodinâmicos. . . . . . 13
2.8 Esquema para explanação do experimento. . . . . . . . . . . . . . . . 17
2.9 Apresentação dos resultados do experimento. . . . . . . . . . . . . . . 18
2.10 Diferentes respostas para alta e baixa razão mássica. . . . . . . . . . 20
3.1 Esquema geral para Quantificação de Incertezas. . . . . . . . . . . . . 26
3.2 Esquema detalhado para Quantificação de Incertezas. . . . . . . . . . 30
4.1 Esquema do acoplamento fluido-estrutura para VIV. . . . . . . . . . . 38
4.2 Ajuste dos parâmetros do modelo. . . . . . . . . . . . . . . . . . . . . 42
4.3 Nós de diferentes níveis hierárquicos de grides esparsos. . . . . . . . . 46
4.4 Esquema para o algoritmo elaborado. . . . . . . . . . . . . . . . . . . 50
5.1 Estudo da condição inicial. . . . . . . . . . . . . . . . . . . . . . . . . 53
5.2 Simulação da quantidade de interesse. . . . . . . . . . . . . . . . . . . 54
5.3 Resposta temporal distante da zona de sincronização. . . . . . . . . . 54
5.4 Resposta temporal próxima da zona de sincronização. . . . . . . . . . 55
5.5 Resposta temporal na zona de sincronização. . . . . . . . . . . . . . . 55
5.6 Resultados experimentais para m∗ = 320 e (m∗ + Cm)ζ = 0,251. . . . 56
5.7 Resultados para a simulação do modelo. . . . . . . . . . . . . . . . . 56
5.8 Envelope de resultados devido a velocidade de corrente incerta. . . . . 60
5.9 Média e variabilidade dos resultados devido a U . . . . . . . . . . . . . 61
5.10 Função densidade de probabilidade para u∗ = 4,7677. . . . . . . . . . 62
5.11 Funções densidade de probabilidade devido a U . . . . . . . . . . . . . 63
x

5.12 Proposta de ajuste para os parâmetros. . . . . . . . . . . . . . . . . . 64
5.13 Envelope da amplitude reduzida de vibração devido a κ(θ). . . . . . . 65
5.14 Média e variabilidade de A∗ devido a κ(θ). . . . . . . . . . . . . . . . 65
5.15 Funções densidade de probabilidade devido a κ(θ). . . . . . . . . . . . 66
5.16 Envelope da amplitude reduzida de vibração devido a ε(θ). . . . . . . 67
5.17 Média e variabilidade de A∗ devido a ε(θ). . . . . . . . . . . . . . . . 68
5.18 Funções densidade de probabilidade devido a ε(θ). . . . . . . . . . . . 68
5.19 Envelope da amplitude reduzida de vibração devido a κ(θ) e ε(θ). . . 70
5.20 Média e variabilidade de A∗ devido a κ(θ) e ε(θ). . . . . . . . . . . . 70
5.21 Funções densidade de probabilidade devido a κ(θ) e ε(θ). . . . . . . . 71
xi

Lista de Tabelas
5.1 Valores nominais adotados. . . . . . . . . . . . . . . . . . . . . . . . . 51
5.2 Comparação entre os métodos de MC e CE . . . . . . . . . . . . . . . 58
xii
Capítulo 1
Introdução
A ciência moderna tem como precursores Descartes, Galileu e Newton, que intro-
duziram o rigoroso formalismo matemático na Física. De acordo com esta visão, o
modelo de um fenômeno físico pode ser idealizado como uma representação mate-
mática abstrata através de um conjunto de equações, cuja análise e solução buscam
reproduzir observações experimentais. Estes modelos foram utilizados por cientis-
tas para entender e criar as leis da física. Nos últimos tempos, este conceito se
desenvolveu e a elaboração de modelos se tornou uma ferramenta indispensável aos
engenheiros para projetar e fabricar produtos.
Tendo isto em vista, presencia-se uma revolução causada pela Simulação Com-
putacional. A crescente disponibilidade de recursos computacionais e a criação de
algoritmos mais velozes permitem um maior refinamento dos modelos computaci-
onais promovendo a diminuição dos erros numéricos nas simulações de problemas
de Engenharia. Como resultado, estes erros já atingiram níveis aceitáveis de pre-
cisão para problemas reais da indústria. Entretanto, os modelos não são capazes
de representar totalmente a complexidade dos fenômenos físicos. De fato, os mode-
los matemáticos estão sempre sujeitos à simplificações e a algum tipo de validação
utilizando resultados experimentais na qual sempre estão presentes incertezas nas
medições. Além do mais, a estimativa dos dados de entrada para os modelos também
podem carregar incertezas.
Se a resposta de um modelo é sensível às mudanças nos dados de entrada, até
mesmo pequenas variações nestes dados podem causar efeitos significativos nos re-
sultados. Fato este que pode acarretar em uma grande perda de desempenho em
projetos altamente otimizados. Os sistemas dinâmicos não-lineares com soluções
descontínuas e comportamentos instáveis podem ser altamente sensíveis à varia-
bilidade dos parâmetros de entrada. Este é o caso dos problemas de interação
fluido-estrutura. Como agravante, estes problemas são conhecidos por amplificar
variabilidade com o decorrer do tempo de integração [1]. Como consequência, o
efeito das incertezas podem causar mais impacto do que os erros da solução do
1
modelo matemático nas simulações para predizer o comportamento das interações
fluido-estrutura. Então, para obter maior credibilidade em um modelo para predição
de um fenômeno de interação fluido-estrutura é possível realizar uma Quantificação
de Incertezas.
1.1 Motivação
Grande parte dos esforços realizados na área de interação fluido-estrutura é dedicado
ao estudo de Vibrações Induzidas por Vórtices (VIV). As áreas que apresentam maior
interesse na compreensão do fenômeno de VIV são as de projeto com aplicação
hidrodinâmica e hidroacústica [2].
Uma das áreas que faz uso destas aplicações é a indústria do petróleo. O interesse
está voltado para modelar o fenômeno de VIV em estruturas marítimas, que serão
utilizados para explorar reservas de hidrocarbonetos em grandes profundidades [3].
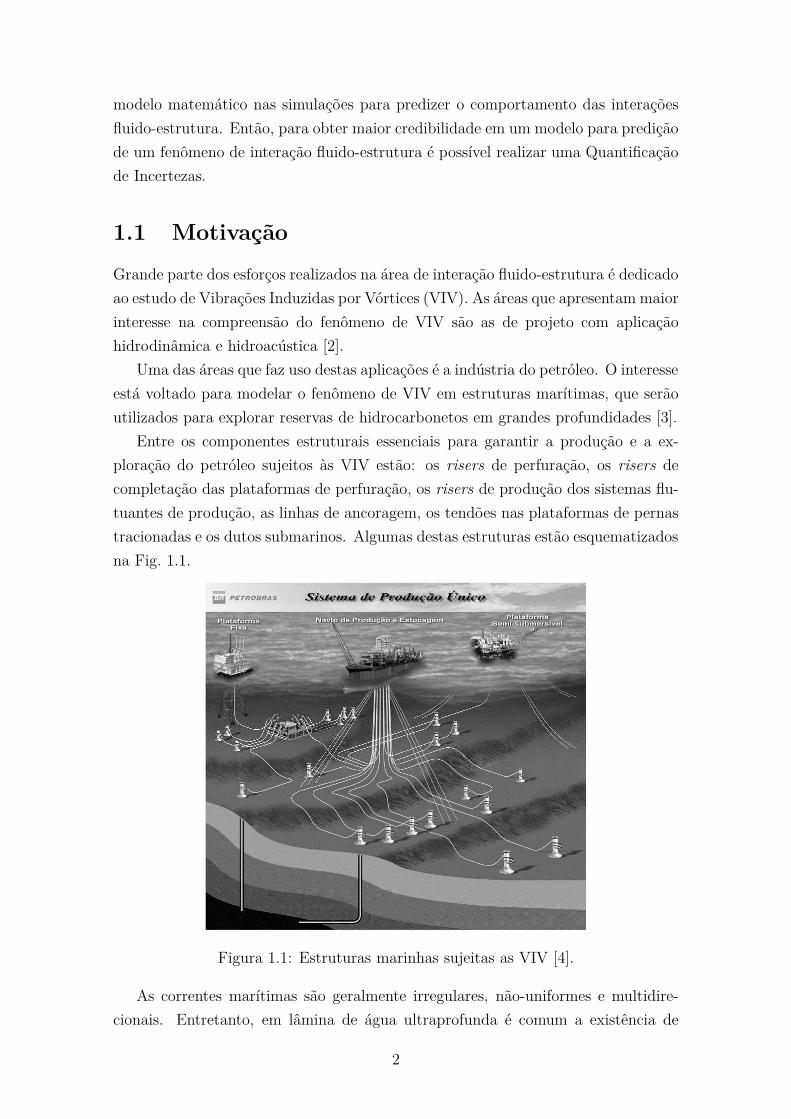
Entre os componentes estruturais essenciais para garantir a produção e a ex-
ploração do petróleo sujeitos às VIV estão: os risers de perfuração, os risers de
completação das plataformas de perfuração, os risers de produção dos sistemas flu-
tuantes de produção, as linhas de ancoragem, os tendões nas plataformas de pernas
tracionadas e os dutos submarinos. Algumas destas estruturas estão esquematizados
na Fig. 1.1.
Figura 1.1: Estruturas marinhas sujeitas as VIV [4].
As correntes marítimas são geralmente irregulares, não-uniformes e multidire-
cionais. Entretanto, em lâmina de água ultraprofunda é comum a existência de
2

correntes constantes em uma única direção. Como consequência, aumenta a chance
de que estas estruturas venham a sofrer os efeitos das VIV [5].
Os projetos para a indústria do petróleo lidam com elementos extremamente
caros e sofisticados. Algumas empresas tem como objetivo a exploração de petróleo
em lâmina de água cada vez mais profunda satisfazendo condições de redução de
custos. O processo de otimização destes elementos estruturais se torna delicado
e a quantificação das incertezas presentes no projeto é essencial para garantir a
credibilidade nos modelos utilizados. Recentemente, a British Petroleum estimou
que 10% do valor de um projeto de estruturas offshore atuando em águas profundas
é destinado a evitar as VIV [3].
A principal razão para isto é que o fenômeno das VIV é naturalmente não-linear,
autolimitado, autoexcitado e multidimensional. Essas características se apresentam
na forma de um escoamento complexo causado pela existência de duas camadas
limites instáveis gerando vórtices. As forças fluidodinâmicas exercidas no corpo de-
vido ao desprendimento de vórtices são alternantes e podem causar fadiga e eventual
falha [6, 7].
1.2 Revisão da literatura
O problema da vibração de um cilindro devido às forças exercidas por uma es-
teira de vórtices remonta aos trabalhos de Strouhal em 1878 e Rayleigh em 1879.
Desde então, devido a grande complexidade do fenômeno, diversos trabalhos foram
publicados. Entretanto, a Quantificação de Incertezas nos modelos de interação
fluido-estrutura através da modelagem estocástica é recente. Consequentemente, o
número de publicações abordando este tema é reduzido.
1.2.1 Vibrações Induzidas por Vórtices
As primeiras publicações identificando o fenômeno das VIV foram feitos por Strouhal
em aeroacústica [8] e por Rayleigh sobre as oscilações das cordas de violino sujeitas
ao escoamento de vento [9]. Entretanto, Birkhoff e Zarantonello, [10] apud [11], fo-
ram os primeiros a sugerir um modelo de oscilador para a esteira de desprendimento
de vórtices. Bishop e Hassan, [12] apud [11], realizaram experimentos em um cilin-
dro oscilando harmonicamente na direção transversal ao escoamento, cobrindo uma
faixa de número de Reynolds de 5850 a 10800. Quando a frequência de resposta
na direção transversal ao escoamento se aproximava da frequência de excitação, a
esteira respondia na frequência do movimento caracterizando uma sincronização.
Baseados nestes experimentos, Bishop e Hassan propuseram que uma esteira sin-
cronizada poderia ser modelada através de um simples oscilador forçado. A maioria
3

dos modelos de esteira resulta em uma equação diferencial ordinária não-linear que,
devidamente integrada no tempo, fornece o histórico de uma variável interna do
escoamento.
Os dois tipos de osciladores que foram mais utilizados, até o momento, para
modelar a força de sustentação exercida pelo desprendimento de vórtices são: o
oscilador de Rayleigh e o oscilador de van der Pol [13]. Ambos são osciladores
autoexcitados, autolimitados e não-lineares de ordem cúbica. Entretanto, em [14],
concluiu-se que o oscilador de van der Pol apresenta melhores características para
modelar a força de sustentação exercida em um cilindro fixo. Este oscilador reproduz
um ângulo de fase entre o componente principal da força de sustentação e sua terceira
harmônica que é próximo ao obtido através de simulações numéricas das equações
de Navier-Stokes.
Em [15], o problema das VIV foi modelado acoplando o oscilador de van der Pol
à um oscilador linear, para modelar a interação entre a esteira de vórtices e uma
estrutura com suportes elásticos. Três formas de acoplamento entre a estrutura e a
esteira de vórtices foram utilizados: deslocamento, velocidade e aceleração. O estudo
comparou os resultados numéricos do modelo com alguns resultados experimentais
para um cilindro forçado e concluiu-se que o acoplamento através da aceleração é o
mais apropriado.
1.2.2 Quantificação de Incertezas
A modelagem e simulação numérica de sistemas complexos está em desenvolvimento
constante em vários campos da Engenharia e Ciências. As simulações numéricas mi-
nimizam os gastos em experimentos que, muitas vezes, são inviáveis nas primeiras
etapas do projeto. Entretanto, estas devem ser cuidadosamente planejadas, realiza-
das e verificadas para fornecer informações úteis e confiáveis em relação ao sistema
em estudo. De fato, a credibilidade na computação realizada é um fator essencial
para a interpretação e análise dos resultados. Além do mais, as simulações inerente-
mente envolvem erros e incertezas associadas as etapas de modelagem do problema
[16].
A Quantificação de Incertezas envolve a caracterização, estimação, propagação e
análise de qualquer tipo de incerteza em um problema de decisão complexa. Qual-
quer que seja o caso, as fontes de incerteza são, geralmente, classificadas em dois
tipos: epistêmicas ou aleatórias [17]. A presença de incertezas pode ser modelada
no sistema através da reformulação das equações governantes. Ou seja, um sistema
governado por equações diferenciais passa a ser governado por equações diferenciais
estocásticas.
Um dos objetivos dos estudos na área da Quantificação de Incertezas é desenvol-
4

ver e avaliar métodos e algoritmos que reflitam de forma precisa a propagação das
incertezas através de modelos. Para esta finalidade, o método de Monte Carlo (MC)
é geralmente empregado, mas é computacionalmente caro [18]. A análise de sensibi-
lidade é mais econômica, mas é menos robusta e depende fortemente do modelo [19].
A técnica mais popular para modelar sistemas estocásticos em Engenharia é pelo
método de perturbação, onde todas as quantidades estocástica são expandidas em
torno da média através de séries de Taylor [13]. No entanto, essa abordagem é limi-
tada à pequenas perturbações. A modelagem estatística Bayesiana é empregada em
diferentes aplicações e conhecida por lidar com incertezas subjetivas. Baseada no te-
orema de Bayes ela relaciona a predição com dados observados [20]. A expansão em
Caos Polinomial (CP) e suas variações são métodos não-estatísticos que receberam
atenção especial nos últimos anos por fornecerem uma representação hierárquica
para processos estocásticos [21]. Entretanto, o método é intrusivo e a expansão dos
termos em CP se torna complexa conforme aumentam o número de variáveis esto-
cásticas. Já o método de Colocação Estocástica (CE) alia a não-intrusividade dos
métodos de amostragem com uma aproximação polinomial na tentativa de aumentar
a taxa de convergência [22].
1.2.3 Quantificação de Incertezas em Vibrações Induzidas
por Vórtices
O fenômeno de VIV apresenta uma interação fluido-estrutura complexa. O fenômeno
é geralmente menos compreendido do que outros processos de forçamento marinho.
Então, a predição das VIV é considerada relativamente menos precisa [23]. Contudo,
existem poucos trabalhos visando a Quantificação de Incertezas nas predições de
VIV.
As incertezas em problemas de interação fluido-estrutura foram modelados atra-
vés do método de expansão em CP em [21, 24, 25]. O algoritmo proposto acopla um
oscilador de segunda ordem com incertezas nos valores de rigidez e amortecimento
às equações de Navier-Stokes para um fluido incompressível para capturar o fenô-
meno de VIV. A partir de uma simulação utilizando o número de Reynolds igual
a 100 foram apresentadas margens de incertezas para a distribuição da pressão na
superfície de um cilindro.
A primeira tentativa de aplicar técnicas recentes de CE para VIV em cilindros
com suportes elásticos abordou um problema bidimensional. Este trabalho teve
como objetivo capturar a sensibilidade da amplitude e frequência de vibração de-
vido às variações nas frequências naturais da estrutura nas direções alinhadas e
transversais do escoamento [26].
Em [6], os autores utilizaram o oscilador de van der Pol com parâmetros randô-
5

micos para modelar as VIV em um riser e prever sua vida em fadiga resultante. No
total foram consideradas quatro variáveis incertas: duas associadas a parâmetros de
calibração do modelo e duas a coeficientes hidrodinâmicos. O modelo proposto foi
capaz de fornecer uma estimativa da vida em fadiga ao longo do riser.
1.3 Objetivos do presente trabalho
O presente trabalho, que se integra na área de Quantificação de Incertezas recen-
temente nucleada no PEM-COPPE, objetiva o desenvolvimento e aplicação de mé-
todos robustos e eficientes para Quantificação de Incertezas nas previsões das VIV.
Através da Quantificação de Incertezas busca-se obter maior credibilidade em um
modelo de predição para VIV.
1.4 Apresentação dos capítulos
Esta dissertação fará uso de conceitos de duas áreas distintas. Os assuntos abordados
em ambas as áreas estão em desenvolvimento acelerado: A área de Quantificação
de Incertezas devido ao aumento do emprego da simulação computacional na in-
dústria e a área de VIV devido ao interesse da exploração de hidrocarbonetos em
lâminas de água ultraprofundas. Para o melhor entendimento dos resultados que
serão apresentados os capítulos se dividem da seguinte forma:
No Capítulo 2 são apresentadas as informações referentes ao fenômeno das VIV.
Atenção especial é dedicada aos assuntos necessários para a interpretação dos resul-
tados. De forma que, o foco é dado sobre a fenomenologia presente nas VIV.
No Capítulo 3 é apresentada uma metodologia básica para a Quantificação de
Incertezas. Os assuntos são abordados do ponto de vista da prática de Engenha-
ria, em especial na modelagem de sistemas mecânicos. São apresentados conceitos
referentes à caracterização e métodos de propagação de incertezas em modelos.
No Capítulo 4 o problema proposto é detalhado. As equações governantes adota-
das para a predição das VIV, assim como do método de propagação das incertezas,
são apresentadas. Também é realizada uma discussão sobre as fontes de incertezas
no modelo.
O Capítulo 5 apresenta os resultados de testes e simulações para o estudo da
Quantificação de Incertezas em VIV. As características e o desempenho de um mo-
delo fenomenológico baseado no oscilador de van der Pol são discutidas a partir de
informações relevantes obtidas no processo de Quantificação de Incertezas.
O Capítulo 6 apresenta as conclusões do estudo e propostas para trabalhos fu-
turos.
6

Capítulo 2
Vibrações Induzidas por Vórtices
O estudo de VIV emprega conceitos de um grande número de disciplinas. Os proble-
mas mais corriqueiros integram idéias da Mecânica dos Fluidos, Mecânica Estrutu-
ral e Vibrações. Porém, na tentativa de descrever o fenômeno para problemas mais
complexos os estudos podem incorporar assuntos da Mecânica dos Fluidos Com-
putacional, Demodulação Complexa e Estatística. As áreas que apresentam maior
interesse na compreensão do fenômeno de VIV são as de projetos voltados para
aplicações fluidodinâmicas [27].
O problema mais estudado envolve a interação de um corpo rígido, geralmente um
cilindro circular, submetido a um escoamento tridimensional. Os graus de liberdade
do cilindro circular são geralmente reduzidos de seis para um. O escoamento é
aproximado como unidimensional. As restrições impostas refletem a complexidade
de se modelar um movimento autolimitado e autoexcitado.
Para entender a mecânica das VIV são empregadas diferentes técnicas que se
complementam. Algo semelhante ao que ocorre no estudo da Mecânica dos Fluidos,
onde um grande número de parâmetros devem ser aproximados, eliminados por
otimização ou variados para que seja possível obter uma solução numérica. Neste
processo, não apenas os dados analíticos, heurísticos e experimentais, mas também
a intuição, devem ser utilizados para avançar no entendimento do fenômeno.
As características do fenômeno das VIV se apresentam na forma de um escoa-
mento complexo causado pela existência de duas camadas limites opostas instáveis
gerando vórtices com dimensões da escala de grandeza do diâmetro do cilindro cir-
cular. Muitas características já estão bem estabelecidas, porém muitas descrições
ainda são empíricas.
As consequências das incertezas sobre certos aspectos do fenômeno e a incapa-
cidade de predizer amplamente a resposta dinâmica da interação fluido-estrutura
são aparentes em aplicações da indústria. Pela incapacidade de predizer de forma
precisa a resposta dinâmica de um sistema submetido a VIV, se faz necessário ins-
trumentar e controlar parâmetros de entrada e saída e o uso de altos fatores de
7

segurança.
Em resumo, é interessante perceber que um mecanismo tão comum como o des-
prendimento de vórtices dá origem a um fenômeno tão complexo com as VIV. Ainda
assim, é mais vantajoso tentar predizer e evitar as VIV do que suprimi-las mudando
o formato do corpo submerso, pois o cilindro circular é um dos formatos mais comuns
nas aplicações da Engenharia.
2.1 Fluidodinâmica ao redor de um cilindro cir-
cular fixo
As características de um escoamento ao redor de um cilindro circular fixo são geral-
mente relacionadas à quantidade adimensional proveniente da razão entre as forças
de inércia e as forças viscosas conhecida como número de Reynolds
Re =du
ν, (2.1)
no qual d é o diâmetro do cilindro circular, u é a velocidade do escoamento e ν é
a viscosidade cinemática do fluido. Este parâmetro adimensional se mostra interes-
sante pois as características do escoamento apresentam grandes mudanças associadas
ao valor do número de Reynolds. As mudanças das características representadas
esquematicamente na Fig. 2.1 são o resultado da interação entre duas regiões do
escoamento.
Figura 2.1: Características do escoamento ao redor de um cilindro circular fixo emcorrente uniforme [28].
Estas duas regiões são chamadas de esteira e camada limite e estão esquema-
tizadas na Fig. 2.2. O tamanho da região da esteira pode ser comparada com a
dimensão do diâmetro do cilindro circular. O mesmo não ocorre para a região da
camada limite, que apresenta extensão muito menor do que o diâmetro do cilindro.
8

Figura 2.2: Esquema evidenciando as duas regiões de escoamento próximas ao ci-lindro circular [28].
As características do escoamento ao redor de um cilindro circular em função do
número de Reynolds se apresentam da seguinte forma [28]: Para a faixa em que o
número de Reynolds Re < 5 (Fig. 2.1 (a)) não ocorre o descolamento da camada
limite. Para a faixa em que o número de Reynolds 5 < Re < 40 (Fig. 2.1 (b))
surge um par de vórtices estacionários simétricos na região da esteira. A partir do
momento em que o número de Reynolds Re > 40 (Fig. 2.1 (c)) a esteira se torna
instável e apresenta como característica principal a presença de vórtices alternantes.
Este fenômeno é chamado de desprendimento de vórtices. Consequentemente, a es-
teira tem a aparência de uma esteira de vórtices como na Fig. 2.3, também chamada
de esteira de von Kármán.
Figura 2.3: Visualização da esteira de von Kármán [29].
Após o início do desprendimento de vórtices o número de Reynolds ainda é
associado à algumas faixas com escoamentos apresentando camadas limites instáveis
com características peculiares. Entretanto, atualmente o interesse prático nesta
definição é irrelevante e não existe um consenso entre autores para definir uma
9

terminologia adequada.
O fenômeno de desprendimento de vórtices é muito importante no estudo da
dinâmica das VIV. Como visto na seção anterior, o desprendimento de vórtices
pode ser observado em escoamentos ao redor de um cilindro circular fixo para os
números de Reynolds em que Re > 40. Para estes valores de número de Reynolds,
a camada limite junto a superfície do cilindro irá descolar devido ao gradiente de
pressão causado pelas características da esteira a jusante do cilindro circular.
Com a ajuda da Fig. 2.4, é possível descrever mais algumas características do
mecanismo do desprendimento de vórtices. O vórtice V1 na Fig. 2.4 (a) se torna
forte o bastante para mover o vórtice V2 ao longo da extensão da esteira. Supondo
que a vorticidade no vórtice V1 é no sentido horário, enquanto a vorticidade do
vórtice V2 é no sentido anti-horário. A aproximação de uma vorticidade no sentido
oposto irá acabar com a vorticidade do vórtice V1 a partir da sua camada limite.
Este é o instante no qual o vórtice V1 será desprendido.
Seguindo o mecanismo, um novo vórtice V3 será formado na Fig. 2.4 (b). Agora o
vórtice V2 assumirá o papel desempenhado anteriormente pelo vórtice V1. O vórtice
V3 será sugado e provocará o desprendimento do vórtice V2. Este processo irá se
repetir de forma alternada entre os lados do cilindro.
Figura 2.4: Mecanismo de desprendimento de vórtices [28].
Como implicação do mecanismo exposto acima, o desprendimento de vórtices
ocorre quando as duas camadas de cisalhantes interagem. Se está interação for
inibida de alguma forma, e.g., colocando uma placa a jusante do cilindro circular, o
desprendimento de vórtices pode ser impedido.
Apesar das características complexas do escoamento de um fluido ao redor de
um cilindro circular fixo, o número de Strouhal aparece como um parâmetro adi-
10

mensional robusto,
St =fdvd
u, (2.2)
onde fdv é a frequência de desprendimento de vórtices ou frequência de Strouhal.
Esta robustez se dá ao fato de que mesmo as simulações numéricas ou experimentos
mais grosseiros podem predizer o número de Strouhal com precisão suficiente [27].
O número de Strouhal pode ser visto em função do número de Reynolds como na
Fig. 2.5. Esta curva foi levantada a partir de dados experimentais para o escoamento
de um fluido ao redor de um cilindro fixo por [30–32] apud [28].
Figura 2.5: Número de Strouhal para um cilindro circular fixo [28].
O fenômeno do desprendimento de vórtices aparece a partir do número de Rey-
nolds Re ≈ 40 com o número de Strouhal St ≈ 0,1. Este valor gradualmente
aumenta com o número de Reynolds atingindo o valor St ≈ 0,2 e apresenta pouca
dispersão na faixa conhecida como subcrítica, em que o número de Reynolds assume
valores de Re ≈ 300 até Re ≈ 3× 105. Nesta faixa é possível dizer que o desprendi-
mento de vórtices ocorre de forma regular e bem definida. Aumentando o número
de Reynolds, a frequência de desprendimento de vórtices apresentará um salto, de-
vido ao comportamento da camada limite que passa de laminar para turbulenta, e
o número de Strouhal passa a ter o valor de aproximadamente 0,45. Este alto valor
é mantido durante uma faixa de número de Reynolds e volta a cair exibindo um
comportamento peculiar.
2.1.1 Forças resultantes
Como foi visto anteriormente, o fenômeno de desprendimento de vórtices se mani-
festa para escoamentos ao redor de cilindros circulares para valores em que Re > 40.
Como consequência, a distribuição de pressão ao redor do cilindro passa por varia-
ções durante o processo de desprendimento de vórtices. Isto resulta na variação das
11

componentes da força atuando no cilindro circular fixo.
A partir da interação entre o escoamento e o cilindro circular fixo irá surgir uma
força resultante motivada pelos efeitos da pressão e viscosidade. A força resultante
é geralmente decomposta em uma direção alinhada e em uma direção transversal
à velocidade do escoamento denominadas, respectivamente, força de arrasto e força
de sustentação.
A média temporal da força de arrasto pode ser obtida a partir da integração no
tempo dos efeitos citados anteriormente. De forma mais simples, devido à simetria
do escoamento, a média temporal da força de sustentação tende a ser nula. Entre-
tanto, a força de sustentação instantânea exercida no cilindro circular não é nula e
pode atingir valores relativamente altos.
A média temporal da força de arrasto pode ser caracterizada como
Fa =12ρdu2Ca, (2.3)
onde, ρ é a densidade do fluido, Ca é a média temporal do coeficiente de arrasto e
pode ser visto como uma função do número de Reynolds. Os resultados experimen-
tais obtidos para mostrar esta relação para um cilindro circular fixo estão expostos
na Fig. 2.6.
Figura 2.6: Média temporal do coeficiente de arrasto para um cilindro circular fixoem função do número de Reynolds [28].
A média temporal para o coeficiente de arrasto diminui com o crescente número
de Reynolds até que este atinja o valor de Re ≈ 300. Entretanto a partir deste valor,
a média temporal do coeficiente de arrasto assume um valor praticamente constante
de Ca ≈ 1,2 até que o número de Reynolds atinja Re ≈ 3× 105. Após este valor, o
coeficiente de arrasto médio sofre uma queda abrupta passando a valer Ca ≈ 0,25.
12
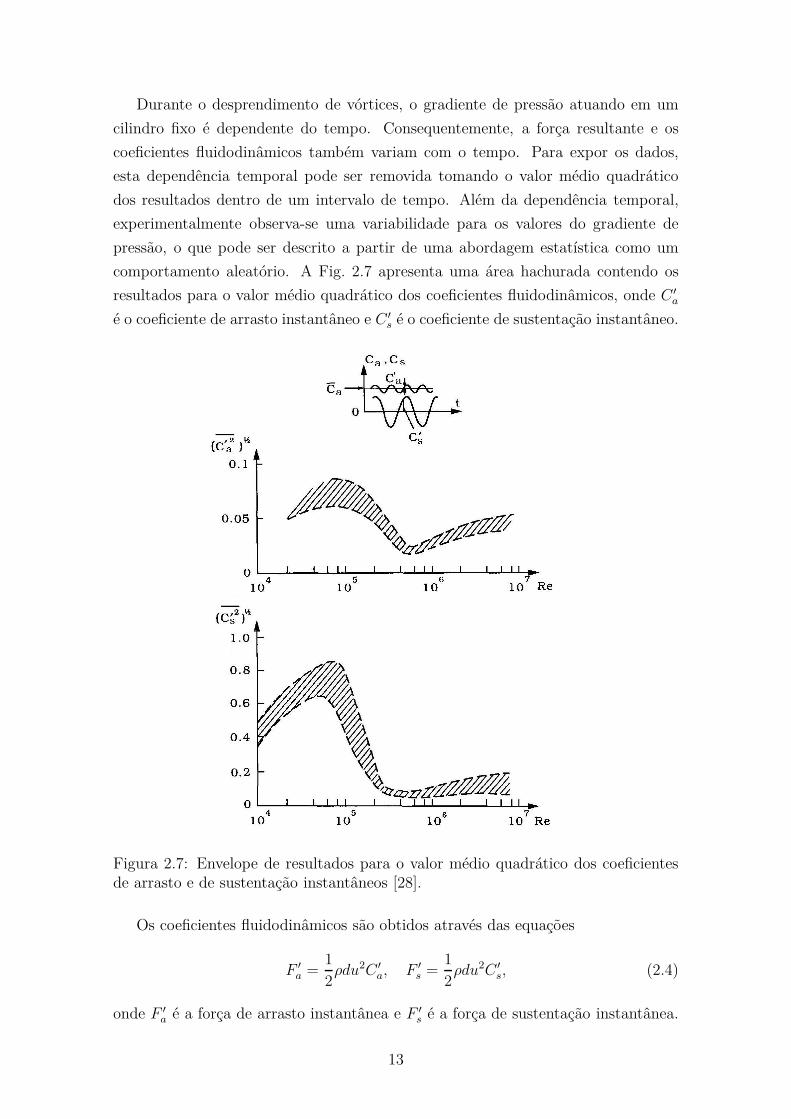
Durante o desprendimento de vórtices, o gradiente de pressão atuando em um
cilindro fixo é dependente do tempo. Consequentemente, a força resultante e os
coeficientes fluidodinâmicos também variam com o tempo. Para expor os dados,
esta dependência temporal pode ser removida tomando o valor médio quadrático
dos resultados dentro de um intervalo de tempo. Além da dependência temporal,
experimentalmente observa-se uma variabilidade para os valores do gradiente de
pressão, o que pode ser descrito a partir de uma abordagem estatística como um
comportamento aleatório. A Fig. 2.7 apresenta uma área hachurada contendo os
resultados para o valor médio quadrático dos coeficientes fluidodinâmicos, onde C ′aé o coeficiente de arrasto instantâneo e C ′s é o coeficiente de sustentação instantâneo.
Figura 2.7: Envelope de resultados para o valor médio quadrático dos coeficientesde arrasto e de sustentação instantâneos [28].
Os coeficientes fluidodinâmicos são obtidos através das equações
F ′a =12ρdu2C ′a, F
′
s =12ρdu2C ′s, (2.4)
onde F ′a é a força de arrasto instantânea e F ′s é a força de sustentação instantânea.
13

Estas forças são parte da decomposição das forças fluidodinâmicas em uma com-
ponente média mais uma componente de variação. Logo, no caso do coeficiente de
sustentação Cs = C ′s.
2.2 Dinâmica da interação fluido-estrutura
Foi visto nas seções anteriores que o escoamento de um fluido ao redor de um cilindro
circular fixo provoca o fenômeno de desprendimento de vórtices para Re > 40 resul-
tando em variações de componentes da força agindo sobre o mesmo. Supondo que
uma estrutura seja considerada um cilindro circular rígido com suportes elásticos
ou um cilindro circular flexível, a variação da força de sustentação provoca vibra-
ções transversais, enquanto a variação da força de arrasto acarreta em vibrações
no sentido da velocidade de corrente. Esta interação fluido-estrutura é complexa
e motiva os estudos sobre as VIV. Algumas revisões mais recentes sobre o assunto
foram apresentadas em [27, 33].
A partir deste momento é considerado a dinâmica linear de uma estrutura flexível
com 1 grau de liberdade na direção y. As forças atuando na estrutura de massa
me são a força restauradora −ky, a força dissipadora cey e uma força externa F ,
onde (·) significa a derivada com relação ao tempo t, ce é o amortecimento da
estrutura e k é a rigidez da estrutura. Toda as grandezas são consideradas por
unidade de comprimento. Em se tratando de interação fluido-estrutura, o estudo do
amortecimento se torna importante para o entendimento do fenômeno.
2.2.1 Estruturas amortecidas
A dissipação de energia de um estrutura é conhecida como amortecimento. Nas
VIV o amortecimento é responsável por limitar a amplitude de vibração. Exis-
tem basicamente três mecanismos de amortecimento: o amortecimento estrutural,
o amortecimento histerético e o amortecimento fluidodinâmico. O amortecimento
estrutural é gerado através do contato entre partes de uma estrutura. O amorteci-
mento histerético é causado pela dissipação de energia interna em materiais, e.g., os
polímeros apresentam grande amortecimento histerético.A partir desse ponto, será
utilizado o termo amortecimento estrutural para referir-se aos efeitos combinados
do amortecimento estrutural e do amortecimento histerético. O amortecimento flui-
dodinâmico é o resultado da dissipação de energia causada pelo movimento relativo
entre a estrutura e o fluido na qual ela se encontra em imersão.
Em VIV, a caracterização experimental do amortecimento estrutural e do amor-
tecimento fluidodinâmico se torna complexa, pois é muito difícil isolar os efeitos
de cada mecanismo de amortecimento. Para isolar o amortecimento estrutural é
14

possível idealizar a situação na qual a estrutura vibra no vácuo. Somente neste
caso, seria possível estabelecer uma metodologia experimental para avaliar o amor-
tecimento estrutural através do fator de amortecimento, que é proporcional à razão
entre a energia dissipada por ciclo e a energia total da estrutura [28].
Para se aproximar do caso da estrutura sujeita a VIV considera-se a estrutura
amortecida imersa em um fluido parado submetida a vibrações livres. O compor-
tamento será parecido com o obtido para a estrutura no vácuo. No entanto, o
amortecimento agora será composto do amortecimento estrutural somado ao amor-
tecimento fluidodinâmico.
Quando uma estrutura vibra imersa em um fluido parado, ela estará submetida
à uma força fluidodinâmica geralmente modelada pela equação de Morison [34],
FM =12ρCaAf(−r)| − r|+ Cmmfd(−r), (2.5)
onde Af é a área projetada no plano transversal à velocidade da estrutura, r é o
vetor de velocidades da estrutura, Cm é o coeficiente de massa adicionada e mfd é a
massa de fluido deslocada pela estrutura.
Para facilitar a análise do amortecimento fluidodinâmico é possível realizar al-
gumas simplificações. Para o caso em que a estrutura pode ser modelada como um
cilindro circular, a área projetada é Af = d e a massa de fluido deslocada pela es-
trutura é mfd = ρπd2/4. Lembrando que todas as quantidades estão definidas por
unidade de comprimento.
O número de estudos experimentais sobre cilindros livres para vibrar em ambas
direções alinhada e transversal à velocidade do escoamento é reduzido. Entretanto,
alguns resultados já apresentaram que a amplitude das vibrações alinhadas ao escoa-
mento apresentam amplitude máxima muito menor do que das vibrações transversais
[35, 36]. Geralmente, para simplificar o problema, o sistema mecânico é reduzido
à um grau de liberdade na direção transversal ao escoamento y. Desta forma, a
Eq. 2.5 é simplificada para,
FM =12ρCad(−y)| − y|+ ρCmπ
d2
4(−y). (2.6)
O segundo termo do lado direito da equação pode ser escrito como −mf y, onde
mf é a massa adicionada, ou seja,
mf = ρCmπd2/4. (2.7)
A partir das hipóteses e simplificações adotadas, a equação do movimento de
15

estrutura vibrando imersa em um fluido parado pode ser reescrita como
(me +mf )y + cey +12ρCady|y|+ ky = F. (2.8)
A análise da dinâmica descrita pela Eq. 2.8 revela que: a massa do sistema
mecânico é composta por uma massa da estrutura mais uma massa adicionada
devido a imersão no fluido parado e surge uma nova força não-linear que afeta o
amortecimento da estrutura.
2.3 VIV em um cilindro circular
Nas seções anteriores foram apresentados alguns resultados obtidos para a interação
fluido-estrutura onde: ou um cilindro circular fixo é exposto ao escoamento de um
fluido ou o cilindro circular livre é imerso em um fluido parado. Entretanto, o
fenômeno de VIV ocorre em estruturas livres imersas em fluidos que apresentam
velocidade de corrente no plano transversal da estrutura.
O estudo do fenômeno das VIV baseia-se fortemente em experimentos, apesar
do grande esforço dedicado ao entendimento dos mecanismos envolvidos no fenô-
meno. Devido a esta dependência experimental, alguns parâmetros adimensionais
foram adotados para facilitar a apresentação e interpretação dos dados de diferentes
publicações.
Um parâmetro que assume grande relevância é a velocidade reduzida dada por
u∗ =u
fnd, (2.9)
onde fn é a frequência natural do sistema, ou seja, a frequência natural da estrutura
imersa no fluido. Os resultados mais representativos do fenômeno das VIV são
apresentados a partir da amplitude reduzida de vibração a∗ = a/d e da frequência
reduzida de vibração f ∗ = fe/fn, onde a é a amplitude vibração da estrutura e fe é a
frequência de vibração da estrutura. Outros parâmetros adimensionais importantes
já citados anteriormente são: o número de Reynolds dado pela Eq. 2.1 e o número
de Strouhal dado pela Eq. 2.2. O parâmetro de razão mássica, que relaciona a massa
da estrutura com a massa de fluido deslocada pela estrutura, é dado por
m∗ =meπρd2/4
. (2.10)
De forma análoga, o fator de amortecimento reduzido relaciona o amortecimento
16

estrutural com o amortecimento fluidodinâmico através de
ζ =ce
2√
k(me +mf ). (2.11)
Para melhor entender o fenômeno das VIV considera-se a Fig. 2.8. Imagina-se
que a velocidade do escoamento é aumentada em pequenos incrementos, começando
do zero. Em cada incremento, a observação dura até que o sistema entre em estaci-
onariedade, ou seja, que o sistema apresente oscilações com alguma periodicidade.
Para cada velocidade de corrente u, as seguintes quantidades são observadas: a
frequência de desprendimento de vórtices fdv, a frequência de vibração da estrutura
fe e a amplitude de vibração a. As quantidades medidas são apresentadas em termos
de a∗ e f ∗ e então comparadas em um gráfico como função da velocidade reduzida
u∗.
Figura 2.8: Esquema para explanação do experimento.
O resultado apresenta-se na forma de gráficos como os da Fig. 2.9. No diagrama
de frequências, a linha contínua f ∗ = 1 marca o valor para quando a frequência de
oscilação é igual à frequência natural do sistema e a linha tracejada marca a frequên-
cia de Strouhal assumindo St = 0,2. O marcador + é utilizado para a frequência de
vibração da estrutura e o marcador representa a frequência de desprendimento de
vórtices.
Assim que a velocidade do escoamento é aumentada a partir do zero, não é possí-
vel observar nenhuma vibração na direção transversal até que a velocidade reduzida
atinja o valor u∗ ≈ 4. Neste ponto, é possível observar vibrações de pequenas am-
plitude. A frequência de vibração da estrutura ocorre num valor muito próximo
à frequência natural do sistema, f ∗ ≈ 1, enquanto o desprendimento de vórtices
ocorre na frequência de Strouhal. Quando u∗ ≈ 5 a frequência de desprendimento
de vórtices abandona a frequência de Strouhal e entra em sincronia com a frequência
natural do sistema.
Esta característica se mantém por uma faixa de velocidades. Nesta faixa pode-se
dizer que a frequência de desprendimento de vórtices deixa de ser controlada pela
17

Figura 2.9: Apresentação dos resultados do experimento [28].
frequência de Strouhal e passa a ser controlada pela frequência de vibração da es-
trutura. Este fenômeno é conhecido como sincronização [28]. Outros termos como
ressonância ou captura da esteira também são utilizados. Durante este fenômeno
ocorre a sincronização de três frequências: a frequência de desprendimento de vór-
tices, a frequência de vibração da estrutura e a frequência natural do sistema. Isto
causa um impacto direto na ação da força transversal que, agora em fase com o
movimento da estrutura, provoca vibrações de grande amplitude.
Assim que a velocidade é aumentada acima da faixa de sincronização, u∗ ' 7,
a frequência de desprendimento de vórtices sai de sincronia com a frequência de
vibração da estrutura, apresentando um salto abrupto para assumir a frequência de
Strouhal novamente. Nota-se que a frequência de vibração da estrutura permanece
sendo muito próxima à frequência natural do sistema, porém a amplitude de vibração
é reduzida devido à falta de sincronia entre a força de sustentação e o movimento
do cilindro circular. Aumentando ainda mais a velocidade de corrente a amplitude
de vibração se torna cada vez menor.
Imaginando que o experimento seja feito de forma similar exceto pela veloci-
dade de corrente, que agora será inicialmente alta e então decrescida. Pela Fig. 2.9
observa-se um fenômeno histérico nos resultados para a amplitude de vibração in-
dicado pelas setas. Este mecanismo está ligado a estrutura da esteira, ou seja, da
18

maneira como são dispostos os vórtices. De fato, a entrada e a saída do sincronismo
aparece associado a mudanças no padrão de desprendimento de vórtices na esteira
[37].
O desprendimento de vórtices a jusante de um cilindro circular fixo como na
Fig. 2.1 apresenta, basicamente, um único padrão de esteira de vórtices. Já para
o caso em que o cilindro é submetido à vibrações controladas ou livres, os padrões
observados se apresentam na forma de vórtices simples S e pares de vórtices P,
dando origem aos padrões de vórtices 2S, 2P e P + S, que são os principais padrões
perto da região de sincronização. Recentemente, um estudo com resolução mais alta
identificou uma região onde dois modos de desprendimento de vórtices se superpõem,
chamado de 2P0 [38].
Os estudos sobre os padrões de desprendimento de vórtices são motivados pelo
fato de que mudanças no comportamento da esteira podem ser associados ao fenô-
meno da sincronização [37]. Um resultado interessante obtido através destes estudos
é que as vibrações forçadas podem criar padrões do tipo P + S, que não é observado
em vibrações livres [33]. Isto demonstra a complexidade dos fenômenos físicos en-
volvidos e leva à uma discussão sobre a validade dos dados experimentais obtidos
através de vibrações forçadas para estimar vibrações livres [27].
A extensão da faixa de sincronização varia com as propriedades do sistema. A
amplitude de vibração é limitada pelo amortecimento fluidodinâmico. A amplitude
máxima de vibração durante a sincronização já observada para os casos de um
cilindro circular é de aproximadamente o seu diâmetro [28].
Uma das características mais notáveis e de interesse prático nas VIV é a sin-
cronização. Durante a sincronização, além das grandes amplitudes de vibração, o
desprendimento de vórtices ocorre na frequência de oscilação da estrutura ao invés
da frequência de Strouhal, ou seja, o movimento do corpo controla a frequência de
desprendimento de vórtices. A frequência de vibração da estrutura pode ser um
pouco diferente da frequência natural do sistema porque o processo de formação e
desprendimento de vórtices altera a massa adicionada à estrutura [27].
Embora os fatos citados acima sejam observados experimentalmente, a definição
da sincronização ainda é discutida na literatura [37]. A descrição dada acima é
característica para sistemas com alta razão mássica m∗ ≈ O(100). Entretanto, para
baixa razão mássicam∗ ≈ O(10) a sincronização pode ser observada para frequências
mais altas do que a frequência natural do sistema [39]. Portanto, definir o fenômeno
de sincronização a partir do valor frequência natural do sistema não é válido para
todos os valores de m∗. Uma definição mais apropriada diz que: a sincronização
ocorre quando a frequência de desprendimento de vórtices é próxima à frequência
de oscilação da estrutura [40].
Os sistemas com diferentes razões mássicas apresentam comportamentos muito
19

distintos em VIV. Um dos motivos para isto é que os sistemas com razões mássicas
mais altas são menos afetados pelas variações da massa adicionada.
As consequências diretas de sistemas com razão mássica baixa são maiores ampli-
tudes de vibração e faixa de sincronização mais extensa. O comportamento durante
a sincronização também se diferencia pela presença de um ramo de valores superiores
para amplitude [41].
A Fig. 2.10 apresenta esquematicamente as respostas de sistemas com alta e baixa
razões mássicas. Observa-se para razões mássicas altas a existência de dois ramos de
amplitudes, denomindados inicial e inferior. Entretanto, para razões mássicas baixas
existem três ramos de amplitude, denominados, inicial, superior e inferior. As setas
indicam histerese e I indica padrões de desprendimento de vórtices intermitentes.
Figura 2.10: Diferentes respostas para alta e baixa razão mássica [37].
Para razões mássicas altas, espera-se que o valor da frequência de vibração na sin-
cronização seja f ∗ ≈ 1. Entretanto, para razões mássicas muito baixas m∗ ≈ O(1),
a frequência de vibração na sincronização aumenta drasticamente. Uma expres-
são ad-hoc foi desenvolvida em [37] para prever a frequência de vibração durante a
sincronização
f ∗s =
√
m∗ + Cmm∗ − 0,54
, (2.12)
e para velocidade reduzida final da sincronização
u∗f = 9,25
√
m∗ + Cmm∗ − 0,54
. (2.13)
Estas expressões podem ser utilizadas para calcular a maior frequência e veloci-
dade reduzida atingida por um sistema no regime de sincronização a partir da razão
mássica m∗. Como consequência surge o conceito de massa crítica: m∗crit = 0,54.
Este valor foi comprovado experimentalmente em [42]. Para tanto, os suportes elásti-
cos do cilindro circular submetido as VIV foram retirados. Desta forma, a frequência
natural do sistema tende a zero, fn → 0, e a velocidade reduzida tende ao infinito,
20

u∗ → ∞. Observou-se que nestas condições persistiam vibrações de grande ampli-
tude e frequência elevada, caracterizando o sincronismo e a existência de uma valor
crítico para a razão mássica.
2.4 Métodos de predição
As predições de VIV compreendem uma grande variedade de métodos. Cada pro-
posta apresenta suas vantagens e limitações. A dificuldade na realização dos ensaios
experimentais faz com os que resultados obtidos a partir de diferentes métodos se-
jam comparados entre si. Ainda existem muitas discrepâncias entre as predições dos
modelos utilizados em VIV [43]. A seguir serão apresentados brevemente os métodos
de predição mais comuns.
2.4.1 Modelos fenomenológicos
Modelos fenomenológicos de predição das VIV fazem uso de ensaios experimentais
utilizando cilindros rígidos com movimentos forçados para caracterizar comporta-
mentos. Comparações entre estes modelos podem ser encontradas em [43, 44]. Um
dos modelos fenomenológicos mais comuns são os modelos de esteira.
Muitos modelos de esteira foram propostos recentemente na literatura [15, 45–
53]. Os modelos geralmente apresentam características de: serem autoexcitados e
autolimitados, a frequência natural da esteira é proporcional à velocidade do esco-
amento, de forma que a relação de Strouhal é satisfeita, a dinâmica da estrutura
interage com a esteira.
A característica comum a todos os modelos de esteira é a possibilidade de esco-
lher uma quantidade representativa para a esteira. Entretanto, existem diferenças
entre os mecanismos assumidos para acoplar esta variável interna da esteira com a
dinâmica da estrutura. Uma revisão sobre este assunto pode ser encontrada em [27].
Recentemente, o oscilador de van der Pol foi revisado para predições de VIV.
Os acoplamentos entre a esteira e a estrutura foi estudado em [15]. O modelo de
esteira proposto qualitativamente e, em alguns aspectos, quantitativamente repro-
duziu características das VIV observadas em experimentos para cilindros rígidos
com vibrações forçadas.
Os modelos de esteira são muito utilizados na simulação das VIV [6, 54]. Uma
das maiores vantagens das abordagens fenomenológicas, por causa da simplicidade
do modelo, é o pequeno custo computacional. Isto permite grandes estudos para-
métricos de VIV. Além do mais, em termos de alto número de Reynolds, é possível
obter a dependência dos coeficientes no número de Reynolds através de experimen-
tos. Isto caracteriza a ampla faixa de aplicação destes modelos. Por natureza, os
21

modelos fenomenológicos fazem uso de dados obtidos em experimentos simples para
predizer comportamentos em aplicações mais complexas.
A validação sistemática e a busca pelo entendimento físico dos mecanismos ele-
mentares que atuam nas VIV são as prioridades para estimar a faixa de aplicação
dos modelos fenomenológicos [50].
2.4.2 Mecânica dos Fluidos Computacional
Muito embora simulações numéricas bidimensionais empregando a Mecânica dos
Fluidos Computacional na predição das VIV possam ser encontrada na literatura
nas últimas décadas, simulações tridimensionais ficam restritas a baixos números de
Reynolds e baixas razões de aspecto. Recentemente, devido ao grande aumento da
capacidade computacional e códigos empregando computação paralela foi possível
realizar algumas simulações tridimensionais com escoamento ao redor de um cilindro
rígido ou flexível para avaliar as VIV. Existem diferentes abordagens para descrever
o campo de velocidades do escoamento. Os métodos mais utilizados são o método
dos vórtices discretos (DVM), Large Eddy Simulation (LES), Reynolds Averaged
Navier Stokes (RANS) e Direct Numerical Solver (DNS).
As simulações empregando DNS com formulação espectral foram acopladas com
as equações de movimento de um riser elástico para um número de Reynolds igual
a 1000 em [55, 56]. Um aumento significativo no número de Reynolds foi obtido em
[57] simulando o escoamento ao redor de um cilindro com oscilações forçadas para
Re = 10000 obtendo os coeficientes de sustentação e arrasto. Esta simulação só foi
possível utilizando um algoritmo paralelo altamente eficiente. Ainda usando um có-
digo tridimensional DNS com formulação spectral foi estudado os modos de vibração
de um riser com diferentes perfis de velocidade de corrente, caracterizando a mis-
tura de modos complexos apresentado em forma de ondas estacionárias e viajantes
[58].
Os métodos empregando LES são utilizados para escoamentos com alto número
de Reynolds. Uma análise bidimensional para um cilindro com um grau de liberdade
foi apresentado em [59]. Uma simulação quasi-tridimensional analisou um tubo longo
e flexível submetido a um escoamento com Re = 2,84 × 105 utilizando um modelo
de LES Smagorinsky para capturar os efeitos de turbulência [60]. Mas, os modelo
de turbulência tridimensional ainda são inadequados para capturar todos os efeitos
do escoamento [27].
O DVM é um esquema numérico Lagrangeano para simular o escoamento bidi-
mensional de um fluido viscoso e incompressível. A vantagem de utilizar este método
é a drástica redução do tempo computacional. Numa extensão quasi-tridimensional
para avaliar as forças fluidodinâmicas, planos bidimensionais descorrelacionados fo-
22

ram acopladas através da estrutura tridimensional em [61].
Os códigos empregando RANS são mais robustos, necessitando de menos tempo
computacional. Até o presente momento, as simulações utilizando RANS para VIV
estão limitadas a oscilações transversais de um cilindro rígido com suportes elásti-
cos submetido a um escoamento uniforme com o número de Reynolds até 15000.
Contudo, não foi possível reproduzir o comportamento para casos de baixa razão
mássica [62]. A literatura ainda carece de comparações entre diferentes modelos de
turbulência e extensões para simulações tridimensionais [63].
Simulações numéricas tridimensionais utilizando métodos espectrais que permi-
tem uma pequena redução no tempo de processamento são reconhecidamente os
métodos numéricos mais precisos para predizer as VIV [57]. Entrentanto, os recur-
sos computacionais ainda não são adequados para simular casos com interesse prá-
tico, i.e., escoamentos com alto número de Reynolds e grandes razões de aspecto.
De fato, embora o significante aumento no poder computacional e em particular o
uso de códigos em paralelo que permitem simulações tridimensionais de escoamento
ao redor de um cilindro flexível ou com suportes elásticos, o número de Reynolds
atingido com este tipo de método é tipicamente da ordem de 103.
A simulação numérica empregando a mecânica dos fluidos computacional ainda
é considerada uma ferramenta com custo computacional proibitivo e com grandes
incertezas. Entrentanto, este é provavelmente o método que vai provar seu potencial
no futuro.
2.4.3 Validação dos modelos de predição para VIV
Para analisar a capacidade de diferentes métodos para predizer as VIV, uma compa-
ração entre resultados experimentais de laboratório e predições de onze modelos foi
realizado em [44]. O estudo de caso abrangeu movimentos alinhados e transversais
ao escoamento que flui ao redor de um riser. O perfil de velocidades da corrente foi
disposto em degraus. Diferentes medidas foram realizadas variando a velocidade de
corrente e a pré-tensão do modelo do riser. Entre os onze modelos surgem, basica-
mente, três grupos diferentes. Os códigos de Mecânica dos Fluidos Computacional
resolvendo o escoamento ao redor do riser utilizando um grande número de planos
bidimensionais descorrelacionados ao longo do seu comprimento e a cada incremento
de tempo atualizando a posição do riser. Dois modelos no domínio do tempo que
usam uma aproximação para diminuir o custo computacional no cálculo das forças
fluidodinâmicas. Cinco modelos híbridos usando dados de medições em cilindros rí-
gidos sujeitos as VIV ou vibrações forçadas para identificar a amplitude de resposta
dos modos que tem maior chance de serem excitados. As conclusões obtidas podem
ser resumidas nos seguintes pontos: os modelos empíricos obtiveram mais sucesso
23

em predizer os deslocamentos transversais do que os códigos baseados na Mecânica
dos Fluidos Computacional, notou-se uma grande dispersão nos resultados das pre-
dições para a curvatura dos movimentos transversais, o deslocamento alinhado à
velocidade do escoamento é subestimado por todos os modelos numéricos.
Apesar de nos últimos anos a semelhança entre as predições de diferentes mode-
los numéricos utilizando os mesmos dados experimentais disponíveis apresentarem
maior semelhança, a discrepância entre os resultados dos modelos numéricos e dos
experimentos continuam grandes.
2.4.4 Métodos experimentais
Existem muitos estudos experimentais em VIV, de forma que se torna muito com-
plicado rever todos os resultados. De forma geral, revisões extensas e conclusões
sobre os últimos resultados pode ser vistas em [27, 28].
O fenômeno de VIV causa grande impacto na vida em fadiga de estruturas ma-
rítimas, especialmente as de aplicação em lâminas de água ultraprofundas. Apesar
disto, é o carregamento marítimo menos entendido em comparação com outros fenô-
menos da interação fluido-estrutura. Estes aspectos foram os motivos para inves-
timentos em estudos de modelos experimentais nas últimas décadas e, atualmente,
eles se apresentam como uma ferramenta substancial na predição das VIV [7].
24

Capítulo 3
Quantificação de Incertezas
Os modelos determinísticos são essenciais na grande maioria dos projetos de Enge-
nharia. Entretanto, na grande maioria das aplicações práticas, existem incertezas
associadas às condições de carregamento, parâmetros estruturais e de materiais,
modelagem das condições de contorno, etc. Para lidar com estas incertezas ineren-
tes mantendo o âmbito determinístico, tradicionalmente são introduzidos fatores de
segurança [64]. Esta prática pode levar ao superdimensionamento de sistemas de
Engenharia e, ainda assim, não exclui a possibilidade de falha. Apesar do notável su-
cesso e avanço trabalhando com análises determinísticas nos campos da Engenharia,
algumas falhas estruturais motivaram a incorporação de análises que levassem em
conta os efeitos das incertezas. Em outras palavras, existe um interesse crescente em
projetos que se mostrem mais robustos e confiáveis [16]. Além da segurança, outro
objetivo do controle sobre os efeitos das incertezas são projetos ótimos em termos de
custo-benefício [65, 66]. Todavia, a análise de modelos levando em conta sistemati-
camente incertezas é um campo desafiador. Os métodos utilizados na Quantificação
de Incertezas podem se tornar complexos, uma vez que o esforço computacional é
muito maior do que para uma análise determinística [67].
Nos últimos anos, a Quantificação de Incertezas vem conquistando novos campos
de aplicação [68]. Algoritmos combinados com conceitos de aproximação adequados
possibilitaram a análise de problemas práticos de Engenharia. Os novos métodos
permitem modelar as incertezas de forma realística, empregando processos estocás-
ticos ou campos randômicos [69]. Outro fator muito importante que contribui para
a Quantificação de Incertezas em sistemas complexos é o avanço computacional. O
aumento da capacidade computacional permitem utilizar modelos detalhados com
esforço computacional razoável através de algoritmos para Computação de Alto De-
sempenho.
A Quantificação de Incertezas em simulações numéricas avança em direção de
um novo tipo de simulação numérica onde as variáveis de entrada e o domínio geo-
métrico tem representações realísticas através da maior quantidade de informações
25

disponíveis. Desta forma, o resultado da simulação não será representado por pontos
isolados, mas por distribuições que expressam a sensibilidade do sistema às variáveis
de entrada consideradas incertas [70]. Esta é uma questão dos estudos de confia-
bilidade e fundamenta os primeiros passos na direção de estabelecer certificados de
conformidade para projetos baseados em simulação computacional.
3.1 Metodologia
A Quantificação de Incertezas em modelos de sistemas físicos pode ser tratada a
partir da formulação de problemas estocásticos. Este tipo de análise surgiu de forma
substancial nos campos da Engenharia Mecânica e Civil por volta de 1970 [71]. Para
a formulação e a solução dos problemas estocásticos são utilizados conhecimentos das
áreas da estatística, teoria da probabilidade e simulação computacional aplicadas ao
fenômeno físico de interesse.
Nesta seção serão apresentados conceitos e metodologias probabilísticas para in-
troduzir incertezas em modelos de sistemas físicos de forma geral. As principais
etapas para a Quantificação de Incertezas estão resumidas na Fig. 3.1. O esquema
apresenta basicamente três etapas principais: a definição de um modelo, a caracte-
rização de fontes de incerteza e o efeito das incertezas nas quantidades de interesse.
Muito embora existam na literatura outras etapas definidas para fases da modelagem
e simulação, a divisão em um número maior de fases apenas discrimina atividades
dentro de um contexto mais amplo [16].
Na Fig. 3.1 considera-se que um modelo para um sistema físico já foi definido.
Após um levantamento sobre os erros e incertezas presentes no modelo, este pode
ser considerado como uma caixa-preta, onde para um vetor de entrada existe um
vetor de saída. A complexidade destes modelos vai de acordo com o problema
que se deseja resolver. As fontes de incertezas podem incluir variáveis incertas de
natureza aleatória ou epistêmica. Estas incertezas surgem a partir de várias fontes,
e.g., incertezas sobre os valores para as variáveis do vetor de entrada ou incertezas
introduzidas a partir da falta de conhecimento sobre algum mecanismo existente no
sistema físico.
Figura 3.1: Esquema geral para Quantificação de Incertezas.
26

Formalmente, um modelo precisa apenas fornecer as quantidades de interesse
na saída Z a partir de uma função Z = H(X,b), onde o vetor de entrada incerto
é dado por X, enquanto o vetor de entrada determinísticos é dado por b. Desta
forma, o tempo de computação necessário para resolver um ponto (x,b), onde x é
uma realização de um estado estocástico, pode variar de frações de segundos até dias
dependendo da complexidade do modelo. O vetor de entrada incerto X pode assumir
grandes dimensões para modelos complexos e se apresentar de muitas formas, e.g., os
valores das incertezas podem ser dependentes de uma posição espacial ou temporal
na forma de um processo estocástico ou um campo randômico [72]. O vetor de
entrada determinístico b leva em conta parâmetros que são controlados com precisão
ou incertezas que não causam grandes impactos na variância das quantidades de
interesse.
Logo, na Quantificação de Incertezas, a primeira etapa consiste em definir um
modelo ou uma sequência de modelos para representar o sistema físico. Esta etapa
apresenta características semelhantes a de uma análise determinística clássica. No
entanto, deve-se ter em mente que o esforço computacional necessário para a Quan-
tificação de Incertezas é superior ao de uma análise determinística.
A segunda etapa consiste em identificar e caracterizar fontes de incertezas, ou
seja, identificar variáveis de entrada que apresentam algum tipo de incerteza. Após
a identificação das variáveis, é necessário empregar técnicas de modelagem de incer-
tezas.
A terceira etapa consiste em analisar os resultados da propagação das incertezas
através do modelo. Existem alguns métodos propostos para realizar a tarefa de
propagação de incertezas, muitos trabalhos vem sendo publicados cujo objeto de
estudo são as características e a validade destes métodos.
Na prática, categorizar variáveis de um modelo entre determinísticas e incertas é
mais uma questão de escolha do que teoria. Isto quer dizer que, durante o processo
de Quantificação de Incertezas é possível mover variáveis de um grupo para outro
baseando-se na sensibilidade do modelo. Em outras palavras, mesmo que uma va-
riável de entrada tenha seu valor incerto, se o modelo escolhido for insensível a esta
incerteza, ou seja, a variabilidade da quantidade de interesse devido a esta variável
incerta for pequena, então a variável pode ser considerada determinística assumindo
um valor determinado pelo analista.
Existem basicamente quatro objetivos da análise de Quantificação de Incertezas
[64, 73],: entender a influência ou importância de incertezas, desta forma servindo
de guia para direcionar medições, modelos ou estudos; dar credibilidade para um
modelo ou método, i.e., para obter uma visão mais crítica sobre um modelo; compa-
rar desempenhos e otimizar sistemas; avaliar o atendimento de normas reguladoras
para operação de sistemas de risco.
27
O emprego da análise de Quantificação de Incertezas pode associar mais de um
dos objetivos citados acima. Inclusive, os objetivos podem ser modificados con-
forme a análise ganha maturidade. Geralmente, o estudo realizado para entender a
influência ou importância de incertezas e para dar credibilidade a um modelo ocor-
rem numa fase inicial de projeto, enquanto a otimização de sistemas e demonstração
de cumprimento de normas aparecem como análises conclusivas.
A atualização de modelos pode ser um dos objetivos de uma análise de Quanti-
ficação de Incertezas. Esta atualização pode ocorrer através do ajuste de medições
para atingir um critério, da mudança da consideração sobre algumas variáveis incer-
tas para diminuir o custo computacional sem comprometer a robustez ou refinando
um modelo para diminuir as fontes de incerteza [74]. Este processo é essencial para
otimizar modelos incertos que serão utilizados num âmbito maior.
O tratamento quantitativo dado aos vetores de entrada e saída do modelo va-
riam de acordo com o objetivo da Quantificação de Incertezas. Entretanto, alguns
resultados são esperados para as quantidades de interesse, e.g., média e variância de
uma variável, a função densidade de probabilidade de algum evento, intervalos de
confiança para os valores de algum parâmetro ou uma probabilidade de falha.
A Quantificação de Incertezas pode fazer parte de um sistema de controle. Por
exemplo, dada uma instalação, um processo ou um sistema que precisa ser suficien-
temente robusto para receber uma licença de operação ou certificação. Para tanto é
utilizada uma medida de incerteza estabelecendo que para ser considerado robusto,
o modelo do sistema deve apresentar uma probabilidade de falha menor que 10%
ao ano, para um intervalo de confiança de 95%. Possivelmente, na maioria das
aplicações não existirão critérios tão explícitos como os do exemplo, especialmente
se a prática da Quantificação de Incertezas for relativamente recente no campo de
aplicação.
A escolha das quantidades de interesse pode se apresentar de forma natural se
o objetivo da análise é atender alguma especificação ou selecionar modelos. No
entanto, quando o objetivo é aumentar a credibilidade de um modelo, a escolha da
quantidade de interesse pode se tornar arbitrária.
Uma vez que as fontes de incertezas e as variáveis de entrada correspondentes
estão identificadas, surge a etapa de modelagem das incertezas. Na metodologia
probabilística o modelo de incertezas será teoricamente uma função densidade de
probabilidade conjunta do vetor de entrada incerto X, entretanto algumas conside-
rações podem ser feitas para simplificar esta tarefa, e.g., assumir que as variáveis
incertas são estatisticamente independentes.
Qualquer que sejam as condições adotadas, é preciso levantar a maior quantidade
possível de informações para caracterizar de forma satisfatória as variáveis incertas.
Estas informações incluem: observações diretas sobre as variáveis incertas, aplicando
28

inferências estatísticas se possível; julgamento de especialistas sobre intervalos de
realizações para alguns eventos; argumentação física, i.e., mesmo considerando in-
certezas, algumas variáveis devem ser positivas para manter a consistência física;
observações indiretas, quando os modelos são calibrados ou validados envolvendo
métodos inversos.
A modelagem de incertezas pode se tornar uma etapa associada a alto consumo
de recursos devido à necessidade de um grande número de dados. Entretanto, é
extremamente importante a caracterização das variáveis incertas que apresentam
grande impacto na quantidade de interesse.
O cálculo da quantidade de interesse depende da metodologia escolhida para
a propagação das incertezas. Esta etapa é necessária para propagar as incertezas
existentes nas variáveis de entrada através do modelo resultando em incertezas so-
bre as variáveis de saída. Utilizando a abordagem probabilística, isto implica em
estimar a quantidade de interesse de Z = H(X,b), definido a função densidade de
probabilidade do vetor de entrada incerto X.
De acordo com a quantidade de interesse e as características do sistema do modelo
podem ser empregados mais de um método. A comparação de resultados obtidos
através de diferentes métodos serve para aumentar a credibilidade da análise. Outra
técnica utilizada em combinação com os métodos de propagação de incertezas é a
análise de sensibilidade.
A análise de sensibilidade se refere à computação e à análise dos índices de im-
portância das variáveis de entrada em relação a quantidade de interesse Z. De fato,
isto involve uma etapa de propagação e vários métodos foram desenvolvidos para
realizar esta tarefa em especial [19]. Entretanto, na prática muitas vezes é possível
considerar cada parâmetro incerto de forma independente e utilizar um método de
propagação de incertezas convencional para analisar os efeitos na quantidade de in-
teresse devido a incerteza sobre este único parâmetro. Os resultados apresentados
desta forma podem assumir o papel de uma análise de sensibilidade.
Apesar de existirem métodos bem desenvolvidos, especialmente para confiabili-
dade estrutural, eles não são genéricos o suficiente para se enquadrar em uma grande
parte das aplicações de Engenharia. Logo, para ampliar os campos de aplicação de
análises não-determinísticas é preciso estabelecer os métodos de propagação de in-
certezas.
3.1.1 Análise da Quantificação de Incertezas
A partir dos conceitos discutidos até este ponto já é possível expandir um esquema
mais elaborado para a Quantificação de Incertezas. As considerações sobre o conceito
envolvido na análise de Quantificação de Incertezas exposto na Fig. 3.1 aparecem
29

com maiores detalhes conceituais na Fig. 3.2.
Figura 3.2: Esquema detalhado para Quantificação de Incertezas [64].
Neste quadro elaborado da análise da Quantificação de Incertezas foram incor-
porados alguns exemplos para as quantidades de interesse, critérios de decisão e
processos de atualização e apresentação dos dados. Os exemplos condizem com a
abordagem probabilística adotada nesta dissertação. Portanto, serão expostas algu-
mas informações de interesse prático para a Quantificação de Incertezas.
Uma das interpretações para os resultados é sob uma visão frequentista, ou seja,
entender x e z como realizações observáveis de uma dada variável ou evento incertos.
Isto possibilita a representação através de funções de densidade de probabilidade a
partir de um histograma. Neste contexto, modelar funções de densidade de proba-
bilidade para variáveis incertas na entrada se dá através da inferência estatística.
Esta abordagem favorece a interpretação dos resultados e possibilita a validação
potencial do modelo incerto a partir de um grande número observações.
Outras interpretações são possíveis a partir da mesma visão probabilística. Uma
interpretação subjetiva é considerar a distribuição de probabilidade como uma crença
da realização de um evento sem necessariamente fazer referência à observação da
variável física. Desta forma, uma quantidade de interesse pode ser utilizada num
processo de tomada de decisão sem se basear na validação a partir de observações.
Esta interpretação é importante pois a validação a partir de observações nem sempre
é possível.
Utilizar as distribuições de probabilidade para a entrada X de um modelo e
30

considerar as medidas de probabilidade da saída Z favorece a exploração do modelo
aumentando a credibilidade nas simulações. Logo, entradas e saídas do modelo
podem ser não-observáveis, sendo apenas variáveis abstratas utilizadas no processo
de pesquisa e desenvolvimento.
Apesar das diferenças entre as interpretações para a abordagem probabilística,
elas compartilham das mesmas características práticas durante a implementação,
e.g., a escolha de um método numérico para a propagação das incertezas através do
modelo.
3.2 Modelos de sistemas mecânicos
Para esclarecer as fontes e o tratamento dado as incertezas, serão apresentadas al-
gumas etapas da elaboração de um modelo. No desenvolvimento das etapas serão
evidenciados os pontos que podem introduzir incertezas, especialmente na modela-
gem de sistemas mecânicos.
A primeira etapa consiste em especificar o sistema físico e a vizinhança. A espe-
cificação inclui determinar quais eventos físicos e quais tipos de acoplamentos entre
diferentes processos físicos serão considerados. Nesta etapa também deve-se identi-
ficar elementos do sistema ou da vizinhança que podem ser considerados incertos. O
sistema físico pode existir ou não, durante a etapa de modelagem conceitual apenas
são identificados possíveis eventos, processos físicos contendo incertezas aleatórias
ou epistêmicas.
Em seguida é necessário desenvolver modelos matemáticos a partir do modelo
conceitual. A complexidade dos modelos depende de cada fenômeno considerado.
Nesta etapa, devem ser elaboradas as equações governantes e auxiliares, assim
como condições iniciais e de contorno para o sistema. Outra atividade a ser re-
alizada nesta etapa é a seleção de representações apropriadas para os elementos
não-determinísticos do problema.
A modelagem matemática pode resultar na introdução de uma incerteza epistê-
mica ou um erro desconhecido, especialmente quando mais de um modelo pode ser
empregado para o mesmo aspecto de um problema. Presumidamente, um modelo
é o mais adequado para a simulação, mas essa informação pode não ser disponível
previamente. Além do mais, o modelo mais adequado pode ter um custo que torne
a análise inviável. Desta forma, adota-se um modelo viável e trata-se de modelar as
incertezas associadas a este modelo.
Qualquer modelo matemático é, por definição, uma simplificação da realidade.
Qualquer sistema complexo de Engenharia, ou até mesmo processos físicos, possuem
características que não estão contempladas em um modelo matemático. Segundo
[75]: "Todos os modelos estão errados, alguns são úteis".
31

3.2.1 Validação de modelos
Validar um modelo, em termos de estabelecer um nível aceitável de credibilidade
para uma aplicação em específico, é um assunto fundamental na prática de Engenha-
ria, principalmente nas etapas de projeto e desenvolvimento de sistemas mecânicos.
A Quantificação de Incertezas pode ser utilizada como uma ferramenta na validação
de modelos [76]. De maneira que, a finalidade da Quantificação de Incertezas é obter
uma análise crítica do modelo.
Em geral, as questões levantadas pela Quantificação de Incertezas são válidas no
processo de validação de um modelo. Entretanto, a validação de um modelo é um
assunto mais amplo. O processo de validação de modelos envolve muitas atividades,
desde testes numéricos padronizados a projetos experimentais rigorosos [77].
Apesar das diferentes técnicas ou das definições envolvidas em processos mais ou
menos rigorosos, a validação de modelos implica na comparação dos resultados com
dados experimentais, opiniões de especialistas ou outros modelos que proporcionem
credibilidade dentro de uma faixa de aplicação. A validação de modelos, que é
essencial, embora eventualmente negligenciada na prática, limita o domínio e o tipo
de aplicação, variáveis e quantidades de interesse. De fato, um modelo pode ser
aceitável para predizer a dispersão de uma dada variável de interesse na saída e ao
mesmo tempo inaceitavelmente impreciso para as outras, o que torna a validação de
modelos um assunto complexo.
3.3 Fontes não-determinísticas
Na literatura, o uso da terminologia incerteza e erro é muitas vezes ambíguo [78].
Diferentes estudos aplicam a mesma terminologia, mas com significados inconsis-
tentes. Isto motiva uma clarificação sobre a terminologia que será utilizada nesta
dissertação. As fontes de comportamentos físico não-determinísticos consideradas
são devido às incertezas aleatórias ou epistêmicas, além de imprecisões adicionadas
durante as etapas de modelagem do sistema físico e a erros de simulação.
As incertezas aleatórias também são apresentadas na literatura como incertezas
irredutíveis, incertezas inerentes, variabilidade ou incerteza estocástica. As incer-
tezas aleatórias descrevem variações imprevisíveis no comportamento de sistemas
físicos, e.g., a velocidade de uma corrente marinha. Outra característica deste tipo
de incerteza é que qualquer esforço realizado na tentativa de reduzir a incerteza
aleatória é inútil. Desta forma, os estudos dedicados a este tipo de incerteza tem
como objetivo caracterizar o comportamento da variabilidade, ou seja, através de
um grande número de observações inferir uma distribuição de probabilidade que
represente da melhor forma possível a frequência de ocorrência dos eventos. Geral-
32

mente, as fontes de incertezas aleatórias podem ser isoladas de outras contribuições
de incertezas para o modelo, o que facilita sua caracterização.
Incertezas epistêmicas são uma fonte de comportamento não-determinístico ori-
ginadas da falta de conhecimento sobre um fenômeno ou ambiente. Na literatura,
também são chamadas de incertezas redutíveis, incertezas subjetivas ou incertezas
cognitivas. Mesmo que a diferença entre incertezas aleatórias e incertezas epistê-
micas ainda seja objeto de debate na literatura [17], nesta dissertação as incertezas
epistêmicas são definidas como uma imprecisão potencial em qualquer fase ou ativi-
dade do processo de modelagem que é devida à falta de conhecimento. A definição
utiliza a palavra potencial significando que a imprecisão pode ou não existir, ou seja,
pode ser que mesmo existindo a falta de conhecimento acerca de algum evento não
exista imprecisão alguma na forma como foi modelado. Outra interpretação para
as incertezas epistêmicas vem a partir de informações incompletas. As informações
incompletas podem ser causadas por vagueza, não-especificidade ou dissonância. Va-
gueza é caracterizada pela informação que tem sua definição imprecisa ou confusa,
geralmente tem origem na comunicação por linguagem. Não-especificidade se refere
à variedade de alternativas possíveis para uma dada situação. Dissonância se refere
à existência de conflitos, parciais ou totais, entre evidências.
Erro por definição é uma imprecisão identificável em qualquer etapa ou atividade
de modelagem e simulação que não é devido à falta de conhecimento. Essencialmente
um erro é introduzido quando se utiliza uma abordagem simplificada mesmo sabendo
que poderia ser utilizado uma mais detalhada. Isto ocorre devido a restrição prá-
ticas, como custo e tempo. O analista ainda pode separar os erros introduzidos
em dois grupos: erros conhecidos ou erros desconhecidos. Erros de valor conhecido
são aqueles que o analista pode identificar a magnitude ou o impacto, e.g., erros de
precisão computacional, aproximações adotadas para simplificar um modelo de um
processo físico, discretização de equações diferenciais parciais. Erros desconhecidos
são imprecisões que passam despercebidas pelo analista, mas podem ser identifi-
cadas, e.g., o analista tem a intenção de realizar um tipo de análise mas por erro
humano acaba realizando outra. Infelizmente, não existe um método simples para
estimar e controlar os erros desconhecidos. Geralmente este tipo de erro deve ser
identificado a partir de revisões das atividades.
3.3.1 Caracterização de funções densidade de probabilidade
Geralmente, uma fonte de incerteza aleatória é descrita por uma quantidade dis-
tribuída em uma dada faixa de valores. O valor exato de um evento ocorre dentro
desta faixa, mas varia a cada realização. Idealmente, informações objetivas sobre
a faixa de valores e a chance de ocorrência de eventos está disponível. Através da
33

inferência estatística esse conjunto de dados é convertido para uma função densidade
de probabilidade. A literatura apresenta muitos estudos sobre grande variedade de
funções de densidade de probabilidade e suas aplicações na descrição de quantida-
des aleatórias [72]. Entretanto, nem sempre é possível obter um número suficiente
de observações para realizar a inferência estatística. Neste caso, a modelagem é
submetida ao julgamento de um especialista.
O julgamento de especialistas é muito utilizado para estimar funções densidade
de probabilidade de fontes de incerteza epistêmicas ou fontes de incertezas aleató-
rias onde a observação dos eventos é reduzida ou complexa. A inexistência de uma
prática sistemática probabilística e o possível julgamento tendencioso dado pelos es-
pecialistas motivaram alguns protocolos e técnicas [79]. Todavia, abordagens mais
simples são utilizadas na prática, e.g., supondo que as únicas informações sobre uma
fonte de incerteza em um modelo são obtidas a partir do julgamento de engenheiros
e especialistas, os modelos paramétricos podem ser utilizados para traduzir este jul-
gamento em distribuições de probabilidade apropriadas. Neste caso a distribuição de
probabilidade apropriada é aquela que vai contemplar as características evidenciadas
pelos especialistas sem adicionar informações sobressalentes. Por exemplo, se uma
variável incerta X é limitada ao intervalo [x1, x2], sem nenhum conhecimento sobre
a chance de realizações dentro deste intervalo, então uma distribuição uniforme se
apresenta como uma escolha razoável, ou seja, todos os valores dentro do intervalo
tem a mesma chance de ocorrer e qualquer valor fora do intervalo é impossível. Mas,
se um especialista pensa que um valor x3 pertencente ao intervalo [x1, x2] tem mais
chances de ocorrer, então uma distribuição triangular pode ser adotada, onde as
chances de ocorrência aumentam quando os valores de aproximam de x3.
Outras técnicas podem ser utilizadas como as derivadas do Princípio de Má-
xima Entropia [80]. Entretanto, esta técnica é menos intuitiva, pois sempre associa
uma variável incerta positiva definida pela média à uma distribuição exponencial.
Além do mais, grande parte dos estudos nesta área estão voltados para a estatística
Bayesiana.
O princípio da estatística Bayesiana é precisamente levar em conta o julgamento
de especialistas [20]. As possibilidades desta técnica são interessantes, uma vez que
o julgamento dos especialistas é ponderado, e.g., ao invés de associar um evento à
uma distribuição de probabilidade com parâmetros completamente determinados, é
possível definir um conjunto de distribuições de probabilidade. Ele também possibi-
lita uma atualização do modelo incerto se for possível coletar dados posteriormente.
Outras abordagens também exploram esta idéia de distribuições de probabilidade
imprecisas, como a Teoria de Dempster-Shafer [81].
Estas abordagens são adequadas para a descrição de incertezas epistêmicas, mas
elas continuam muito sofisticadas e geralmente mais avançadas do que é empregado
34
na prática em estudos de incertezas da indústria [64].
3.4 Métodos de propagação de incertezas
Para obtenção das medidas de probabilidade e quantidades de interesse é necessário
propagar as incertezas através do modelo. A abordagem mais usual em Engenharia
para resolver esse tipo de problema é o método de Monte Carlo (MC) [18]. Através de
um conjunto finito de amostras o método de MC fornece os momentos estatísticos da
solução através da inferência estatística. Este conjunto de amostras é obtido através
de repetidas simulações determinísticas de um modelo utilizando geração de valores
quasi-randômicos para variáveis incertas, o que fundamenta sua não-intrusividade.
Desta forma, para ser implementado basta existir um código determinístico funci-
onando. Outra característica positiva é a taxa convergência do método que não
depende do número de variáveis randômicas independentes. Contudo, a abordagem
estatística se torna impraticável para problemas complexos devido ao tempo de si-
mulação. Para chegar a esta conclusão basta imaginar que uma simulação, que pode
levar um dia ou mais para ser concluída, deve ser repetida milhares de vezes para
obter um conjunto de amostras suficientemente grande.
Em [82], Ghanem e Spanos apresentaram as incertezas através de uma represen-
tação espectral dando origem ao Método dos Elementos Finitos Estocástico Espec-
trais (Spectral Stochastic Finite Element) (SSFEM). Este trabalho foi baseado no
estudo de Norbert Wiener sobre o Caos Homogêneo (Homogeneous Chaos) em [83],
que tratava de variáveis randômicas com distribuição de probabilidade Gaussiana e
utilizava uma expansão em polinômios de Hermite para obter uma representação da
variável incerta. Esta idéia foi expandida para outras funções densidade de proba-
bilidade dando origem a Expansão em Caos Polinomial Generalizado (Generalized
Polynomial Chaos) (CPG) em [21]. Estudos mostraram que a taxa de convergência
aumenta com a ordem da expansão dos polinômios [84]. Todavia, esses estudos so-
bre a convergência assumem que a solução é suave, ou seja, no caso da presença de
descontinuidades o desempenho fica comprometido.
Para que fosse possível lidar com as descontinuidades na solução surgiu a idéia do
método de Expansão em Multielementos de Caos Polinomial Generalizado (Multi-
Element Generalized Polinomial Chaos) (ME-CPG) [85–87]. Contudo, o acopla-
mento das equações resultantes para encontrar os coeficientes da expansão se tor-
nam extremamente complexas ao passo que o número de termos da expansão cresce,
caracterizando a chamada "maldição"da dimensionalidade (curse of dimensionality).
O método de Colocação Estocástica busca aliar a rapidez da convergência dos
métodos de Galerkin com a natureza desacoplada da amostragem do método de MC
[88]. Nesta abordagem, a medida de probabilidade é representada por uma aproxi-
35

mação polinomial construída a partir da interpolação de soluções determinísticas em
um determinado conjunto de pontos definidos em uma dimensão estocástica formal
e abstrata. Este conjunto de pontos pode ser dado pelo produto tensorial de funções
de interpolação unidimensionais baseadas nos pontos da quadratura de Gauss [89].
Entretanto, esse conjunto de pontos resulta em um número muito elevado de simu-
lações à medida que aumenta o número de variáveis randômicas. Por outro lado,
os grides esparsos resultantes do algoritmo de Smolyak são fracamente dependen-
tes do número de dimensões estocásticas [90]. Por este motivo, os grides esparsos
obtidos pelo algoritmo de Smolyak interpolados por polinômios de Lagrange foram
utilizados para aproximar dimensões estocásticas relativamente altas [22, 91, 92].
O conceito de hierarquia presente no método de CE foi explorado para possibilitar
refino adaptativo do espaço randômico em [93].
36

Capítulo 4
Análise crítica de modelos
fenomenológicos para predição de
VIV
Esta dissertação apresenta técnicas da Quantificação de Incertezas para obter uma
visão crítica de um modelo utilizado na predição do fenômeno das VIV em aplicações
de Engenharia. O resultado da propagação dessas incertezas revela características
do modelo, fornecendo mais informações para as previsões.
Geralmente, o tempo de simulação e o esforço computacional empregado na
Quantificação de Incertezas é muito maior do que para uma análise determinística.
Então, durante a escolha do modelo de VIV deve-se levar em conta o fator tempo de
simulação. De forma que, se um modelo de VIV demanda muito tempo de simulação
para uma análise determinística, ele se torna pouco prático para a Quantificação de
Incertezas.
Com este problema posto, os modelos fenomenológicos são presumidamente os
mais adequados. Estes modelos permitem considerações que auxiliam no entendi-
mento da física envolvida no fenômeno das VIV. Acerca da grande variedade de
modelos fenomenológicos é necessário estabelecer uma análise crítica em termos de
comportamentos fundamentais. Para tanto, busca-se um modelo fenomenológico
capaz de reproduzir características das VIV da maneira mais simples possível.
Para realizar a propagação das incertezas, o método de CE apresenta caracterís-
ticas desejáveis no presente contexto. A escolha estratégia dos pontos de amostra-
gem e a interpolação dos resultados conferem, para vários exemplos, uma taxa de
convergência mais alta do que o método de MC [93, 94].
37
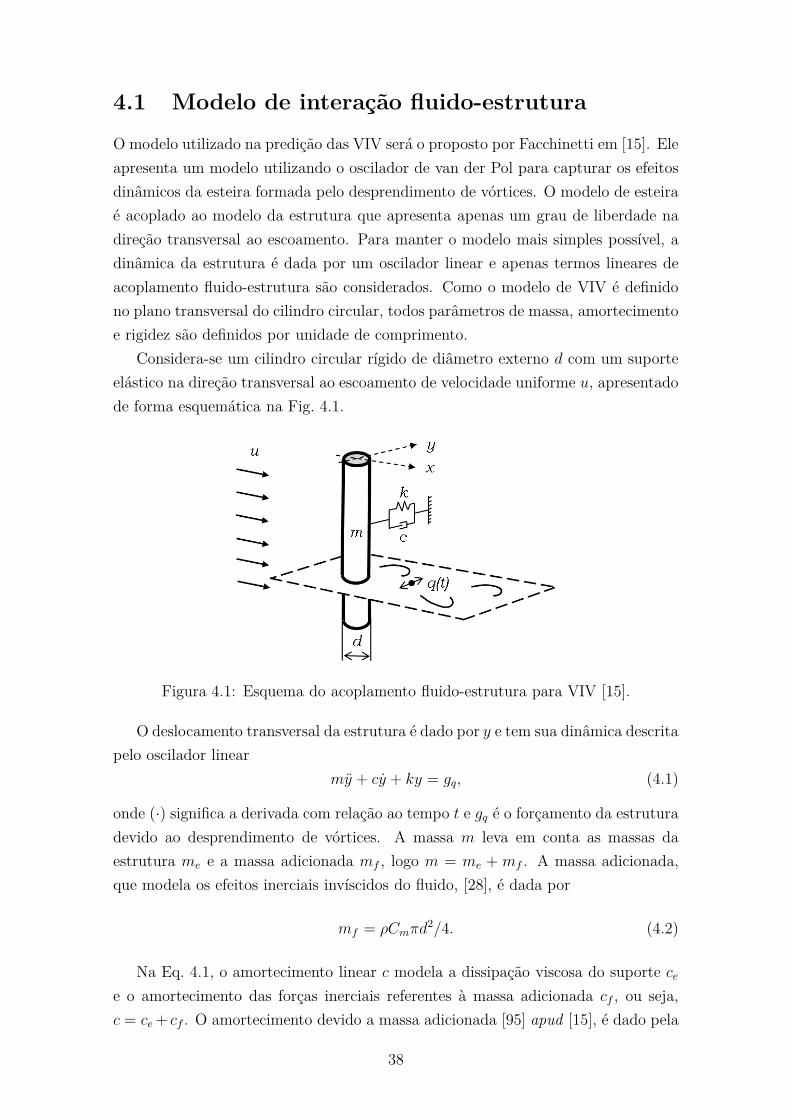
4.1 Modelo de interação fluido-estrutura
O modelo utilizado na predição das VIV será o proposto por Facchinetti em [15]. Ele
apresenta um modelo utilizando o oscilador de van der Pol para capturar os efeitos
dinâmicos da esteira formada pelo desprendimento de vórtices. O modelo de esteira
é acoplado ao modelo da estrutura que apresenta apenas um grau de liberdade na
direção transversal ao escoamento. Para manter o modelo mais simples possível, a
dinâmica da estrutura é dada por um oscilador linear e apenas termos lineares de
acoplamento fluido-estrutura são considerados. Como o modelo de VIV é definido
no plano transversal do cilindro circular, todos parâmetros de massa, amortecimento
e rigidez são definidos por unidade de comprimento.
Considera-se um cilindro circular rígido de diâmetro externo d com um suporte
elástico na direção transversal ao escoamento de velocidade uniforme u, apresentado
de forma esquemática na Fig. 4.1.
Figura 4.1: Esquema do acoplamento fluido-estrutura para VIV [15].
O deslocamento transversal da estrutura é dado por y e tem sua dinâmica descrita
pelo oscilador linear
my + cy + ky = gq, (4.1)
onde (·) significa a derivada com relação ao tempo t e gq é o forçamento da estrutura
devido ao desprendimento de vórtices. A massa m leva em conta as massas da
estrutura me e a massa adicionada mf , logo m = me + mf . A massa adicionada,
que modela os efeitos inerciais invíscidos do fluido, [28], é dada por
mf = ρCmπd2/4. (4.2)
Na Eq. 4.1, o amortecimento linear c modela a dissipação viscosa do suporte cee o amortecimento das forças inerciais referentes à massa adicionada cf , ou seja,
c = ce+ cf . O amortecimento devido a massa adicionada [95] apud [15], é dado pela
38

equação
cf = γΩρd2, (4.3)
onde γ é um parâmetro de perda de força de sustentação relacionado à amplificação
do coeficiente de arrasto Ca [95] apud [15],
γ =Ca
4πSt, (4.4)
e Ω é uma frequência angular de referência. Para o caso de vibrações transversais
a frequência angular Ω é considerada a frequência angular de desprendimento de
vórtices, i.e., Ω = Ωdv = 2πStu/d.
Na Eq. 4.1, ao contrário da rigidez k, que depende apenas das propriedades da es-
trutura, a massam e o amortecimento c têm contribuições de efeitos fluidodinâmicos
mf e cf .
Definindo a frequência angular natural da estrutura imersa no fluido Ωn =√
k/m
e o fator de amortecimento reduzido ζ = ce/(2mΩn), a Eq. 4.1 pode ser reescrita
como
y +
(
2ζΩn +γ
µΩdv
)
y + Ω2
ny =gqm, (4.5)
onde µ = (me +mf )/ρd2 é uma medida de massa adimensional.
A dinâmica da esteira de vórtices é modelada por um oscilador não-linear que
satisfaz a equação de van der Pol [13],
q + εΩdv(
q2 − 1)
q + Ω2
dvq = gy, (4.6)
onde a variável adimensional q pode ser associada ao coeficiente de sustentação.
O valor do parâmetro de ajuste do modelo ε deve ser ajustado a partir de dados
experimentais. O forçamento exercido pela estrutura sobre a esteira é gy foi objeto
de estudo em [15].
4.1.1 Acoplamento fluido-estrutura
Introduzindo o tempo adimensional t∗ = tΩdv e a coordenada espacial adimensional
y∗ = y/d, as Eqs. 4.5 e 4.6 levam ao sistema acoplado
y∗ +
(
2ζδ +γ
µ
)
y∗ + δ2y∗ = g∗q , (4.7)
q + ε(
q2 − 1)
q + q = g∗y , (4.8)
39

onde δ = Ωn/Ωdv é a frequência angular reduzida da estrutura, que também pode
ser escrita como
δ =1
Stu∗, (4.9)
ou seja, uma função do número de Strouhal e da velocidade reduzida u∗ dada por
u∗ =2πuΩnd, (4.10)
resultando nos termos de acoplamento adimensionais
g∗q =gqdΩ2dvm, g∗y =
gydΩ2dv
. (4.11)
O sistema apresentado é um modelo fenomenológico simples para predição das
VIV utilizando a equação de van der Pol como modelo para a dinâmica da esteira
de vórtices. Adicionar não-linearidades no lado esquerdo da equação da dinâmica
da estrutura também foi explorado na tentativa de reproduzir melhor os resultados
experimentais [45–48, 52, 53].
Várias idéias foram propostas para os termos de acoplamento desde o início da
utilização dos modelos de esteira. Entretanto, para manter o modelo mais simples
possível, os termos de acoplamento fluido-estrutura do lado direito do sistema de
equações são limitados à funções lineares de q, y∗ e suas derivadas temporais. De
forma que, a única não-linearidade presente na dinâmica do sistema é a da equação
de van der Pol.
O forçamento da estrutura gq é, geralmente, interpretado como uma força de
sustentação [15], dada em variáveis dimensionais por
gq =12ρu2dCs. (4.12)
É importante ressaltar que Cs é o coeficiente de sustentação instantâneo agindo na
estrutura devido somente ao desprendimento de vórtices.
A variável q pode ser interpretada como um coeficiente reduzido de sustentação
devido ao desprendimento de vórtices dado por q = 2Cs/Cs0, onde o coeficiente de
sustentação de referência Cs0 é aquele observado em uma estrutura fixa submetida
ao desprendimento de vórtices. Na forma adimensional, o forçamento gq é
g∗q =Cs0
16π2St2µq. (4.13)
Muitas escolhas podem ser consideradas para o efeito do forçamento gy na esteira
de vórtices [46, 48]. Os estudos conduzidos em [15] sugerem que o acoplamento pela
aceleração da estrutura apresenta o melhor desempenho para o modelo de predição
40
das VIV. Logo,
g∗y = κy∗, (4.14)
onde κ é um parâmetro a ser ajustado a partir de dados experimentais. Essa escolha
foi inspirada por [96] que utilizou esse acoplamento para modelos que combinavam
fenômenos de Vibrações Induzidas por Escoamentos.
4.1.2 Valores adotados para as variáveis do modelo
O modelo faz uso de doze variáveis. Duas destas variáveis tem seus valores obtidos a
partir de estudos experimentais de desprendimento de vórtices em cilindros circulares
fixos: o número de Strouhal St e o coeficiente de sustentação devido somente ao
desprendimento de vórtices Cs0. Dois coeficientes tem seus valores estimados: o
coeficiente de arrasto de um cilindro circular livre submetido as VIV Ca tem o valor
aproximado para que a dinâmica da estrutura possa ser modelada por um oscilador
linear [15] e o coeficiente de massa adicionada Cm tem seu valor aproximado pela
Teoria de Escoamento Potencial. O modelo utiliza duas variáveis para ajuste: κ e
ε. O escoamento do fluido é caracterizado a partir de duas variáveis: a densidade ρ
e a velocidade u. Os quatro parâmetros restantes dizem respeito a constituição da
estrutura: a massa da estrutura me, a rigidez da estrutura k, o amortecimento da
estrutura ce e o diâmetro d.
Das aplicações que se encaixam numa determinada faixa de Reynolds que co-
brem o regime dito subcrítico, é possível aproximar algumas variáveis como sendo
constantes. Este é o caso do número de Strouhal que pode ser assumido St = 0,2, do
coeficiente de sustentação para um cilindro circular fixo Cs0 = 0,3 e a amplificação
do coeficiente de arrasto Ca = 2,0 [15]. Entretanto, é importante notar que essas
aproximações carregam incertezas inerentes.
A frequência reduzida δ, Eq. 4.9, é um parâmetro que depende apenas do número
de Strouhal e da velocidade reduzida. De forma similar, a massa adimensional
µ depende da massa da estrutura e da massa adicionada, onde o coeficiente de
massa adicionada é aproximado pela Teoria do Escoamento Potencial, resultando
em Cm = 1 [28].
Para a dinâmica da esteira, Eq. 4.8, é preciso definir valores para o parâmetro
da equação de van der Pol, ε, e o parâmetro de escala da força de acoplamento
g∗y, denominado κ. Esta questão foi um dos objetos de estudo em [15], onde os
valores para estes parâmetros foram ajustados através de dados de um experimento
com um cilindro circular forçado à oscilações de amplitude y0 na frequência natural
do sistema. A partir desse forçamento foi medida a amplificação K da força de
sustentação em relação à uma estrutura estacionária submetida ao desprendimento
de vórtices. Na Fig. 4.2 é possível observar o ajuste adotado para os parâmetros. Os
41

marcadores estão relacionados com diferentes fontes de dados experimentais. Nota-
se que existe uma grande dispersão dos dados experimentais utilizados. A partir
de uma interpolação por mínimos quadrados o valor κ = 12 e ε = 0,3 foi proposto,
indicado pela linha cheia. A dispersão dos dados experimentais motiva um estudo
da Quantificação de Incertezas sobre estes parâmetros de ajuste.
Figura 4.2: Ajuste dos parâmetros do modelo aos dados experimentais, a linha cheiaindica o valor proposto de κ = 12 e ε = 0,3 [15].
Os parâmetros κ e ε podem ser ajustados considerando dados experimentais de
VIV em cilindros livres. Isto permitiria maior adesão entre os resultados do modelo
e dados experimentais para vibrações livres. No entanto, os dados experimentais
para analisar o fenômeno de VIV em estruturas livres ainda não estão bem definidos
[33]. Além do mais, para vibrações livres o ajuste torna-se mais complicado, pois
não se pode obter uma forma fechada para as equações do problema.
4.1.3 Quantidades de interesse
A integração numérica do sistema de equações resulta na evolução das variáveis
primárias y∗ e q e de suas taxas de variação com o tempo adimensional. A análise
restringe-se a um intervalo de tempo adimensional [0, t∗f ]. Ainda neste intervalo,
devido às características da integração do modelo, existem um regime transiente e
um regime permanente, ou seja, a resposta temporal leva algum tempo até atingir
um regime periódico. Assim que este regime periódico é atingido, a frequência da
oscilação do deslocamento da esteira passa a ser igual à frequência do deslocamento
da estrutura, ou seja, fq = fy. Estas frequências podem ser obtidas numericamente
através da transformada de Fourier da resposta temporal. O tempo de integração
42

necessário para atingir a condição do regime permanente varia de acordo com os
valores adotados para os parâmetros do sistema. O intervalo de tempo adimensional
contento o regime permanente é τ = [t∗p, t∗
f ], onde t∗p é o tempo adimensional que
marca o início do regime permanente e t∗f é o tempo adimensional que marca o final
da integração.
As quantidades de interesse encontram-se no regime permanente τ e são dadas
por
a∗ = max(|y∗(t∗)|), t∗ ∈ τ (4.15)
f ∗ = F(y∗(t∗)), t∗ ∈ τ (4.16)
ou seja, a amplitude reduzida e a frequência reduzida de vibração da estrutura,
onde max(| · |) é o valor máximo absoluto e F(·) é a Transformada de Fourier. A
partir destas quantidades é possível derivar dados que permitem identificar a zona
de sincronização. Estes são os valores mais importantes não só para comparação
com dados experimentais, mas também para o projeto de estruturas sujeitas ao
fenômeno das VIV [33]. Tradicionalmente, as VIV são evitadas no projeto da vida
em fadiga de risers. No entanto, recentemente, vem sendo utilizada uma abordagem
na qual as VIV são permitidas caso não excedam alguns valores para frequência e
amplitude de vibração [97]. Isto motiva o crescente interesse na avaliação precisa
destas quantidades.
4.2 Modelo estocástico
Como visto no capítulo anterior, uma das formas de tratar a presença de incertezas
é através da reformulação das equações governantes, ou seja, as Eqs. 4.15 e 4.16
passam a ser estocásticas. Uma maneira de interpretar este modelo estocástico é
considerando as incertezas como variáveis de dimensões adicionais do problema [98].
Desta forma, o sistema apresenta espaço físico contendo a dimensão temporal e um
espaço estocástico contendo as dimensões das variáveis estocásticas [99].
Para tanto, se faz necessário definir um espaço de probabilidade completo
(Θ,F ,P), onde Θ é o espaço amostral, F ⊂ 2Θ é a σ-álgebra e P : F → [0, 1]
é a medida de probabilidade e o domínio temporal fechado τ ⊂ R [72]. A partir
destas definições busca-se as funções estocásticas A∗ e F ∗ que descrevem o processo
estocástico dado por
a∗ ≡ A∗(t∗; θ) : τ ×Θ→ R, (4.17)
f ∗ ≡ F ∗(t∗; θ) : τ ×Θ→ R, (4.18)
43

tal que para P-quase completo, θ ∈ Θ as Eqs. 4.15 e 4.16 sejam satisfeitas.
A metodologia aplicada para resolver este sistema de equações estocásticas é
primeiramente reduzir a complexidade do problema. Isto implica em limitar o es-
paço estocástico à uma dimensão finita definindo o número de variáveis estocásticas,
[100]. É importante notar que, o número de variáveis estocásticas necessárias para
descrever o problema depende das incertezas modeladas. Por exemplo, considerando
que a velocidade de corrente estocástica U(θ) é representada através de uma variá-
vel estocástica, ou seja, U = U(ξ1(θ)), a solução se torna um processo estocástico
dependente da variável estocástica ξ1(θ). Desta forma podemos escrever o processo
estocástico descrito pelas Eqs.4.15 e 4.16 como
A∗(t∗; θ) = A∗ (t∗; ξ1 (θ) , . . . ,ξN (θ)) , (4.19)
F ∗(t∗; θ) = F ∗ (t∗; ξ1 (θ) , . . . ,ξN (θ)) , (4.20)
onde N é o número de variáveis do espaço estocástico de N-dimensional. Assumindo
que ξi (θ) são variáveis estocásticas estatisticamente independentes assumindo va-
lores de acordo as com funções de densidade de probabilidade i : Γi → R nos
intervalos fechados Γi, onde i = 1, . . . ,N [99]. A função densidade de probabilidade
conjunta da N-tupla é então dada por
(ξ) =N∏
i=1
i (ξi) ∀ξ ∈ Γ, (4.21)
onde o suporte Γ =∏N
i=1Γi ⊂ R. O resultado deste procedimento é que as equações
Eqs. 4.7 e 4.8 podem ser escritas como um conjunto de equações diferenciais em N+1
dimensões, contemplando N dimensões estocásticas e uma dimensão temporal.
4.3 Método de Colocação Estocástica
Nos métodos de colocação busca-se satisfazer o sistema de equações estocásticas em
um determinado conjunto finito de pontos, denominado nós, definidos no espaço
estocástico. Este aspecto do método se assemelha aos métodos por amostragem,
como o método de MC. Entretanto, diferentemente do métodos de amostragem, que
utilizam pontos de amostragem randômicos ou quasi-randômicos, a escolha dos nós
de amostragem é estratégica para aumentar a eficiência. A solução da simulação
para estes nós são interpoladas por uma função polinomial. Esta função polinomial
cria um espaço contínuo acelerando a convergência da solução [94].
Seja λN = ξiQi=1 ∈ Γ um conjunto de nós prescritos no espaço estocástico
N-dimensional, onde Q é o número de nós. A solução pode ser aproximada pelos
44

polinômios de interpolação de Lagrange como
IA∗ =Q∑
l=1
A∗ (ξl)Ll (ξ) , (4.22)
IF ∗ =Q∑
l=1
F ∗ (ξl)Ll (ξ) , (4.23)
onde Li(ξj) são os polinômios de Lagrange definidos por
Li(ξj) =
1, i = j,
0, i 6= j,(4.24)
para 1 ≤ i, j ≤ Q. Desta forma, o método de CE é equivalente a resolver Q
problemas determinísticos com realizações do vetor estocástico ξl para l = 1, . . . ,Q.
Uma vez que a solução para os polinômios de Lagrange é obtida, os momentos
estatísticos podem ser facilmente obtidos [94], e.g., a média E[A∗] pode ser obtida
através de uma amostragem randômica da solução ou através da integração dada
por
E[A∗] ≈ E[IA∗] =Q∑
l=1
IA∗(
ξl)
∫
Γ
Ll (ξ) (ξ) dξ. (4.25)
A aparente simplicidade da implementação do método esbarra no problema com-
plexo da escolha do conjunto de nós adequados. Este problema se torna mais com-
plicado quando se lida com muitas variáveis estocásticas. Mesmo que nas aplicações
existam algumas propostas de como escolher esse conjunto de nós, a maioria deles
é ad hoc e não permitem controle sobre os erros de interpolação [94].
Para o caso de uma dimensão estocástica, os nós da quadratura de Gauss e
Chebyshev apresentam o menor erro de interpolação. Já para um problema estocás-
tico multidimensional, a metodologia que vem sendo aplicada é construir as funções
de interpolação e o conjunto de nós através do produto tensorial entre as funções de
interpolação e o conjunto de nós unidimensionais. Uma desvantagem desta prática
é que o número de nós necessários aumenta combinatorialmente com o número de
dimensões estocásticas. Este problema pode ser contornado utilizando um conjunto
de nós dados por grides esparsos [22].
Os grides esparsos baseados no algoritmo de Smolyak [90] apud [93], geram um
subconjunto dos nós do produto tensorial completo. Este subconjunto é escolhido
estrategicamente na tentativa de preservar o baixo erro de interpolação do modelo
unidimensional utilizando a menor quantidade de nós possível. Como consequên-
cia, o problema estocástico multidimensional demanda relativamente menor esforço
computacional.
Outra vantagem da utilização deste algoritmo é devido ao fato dos subconjuntos
45

de nós serem hierárquicos. Esta característica se apresenta como uma medida de
erro a partir da diferença entre as soluções aproximadas por níveis hierárquicos
subsequentes [101]. Por exemplo, na Fig. 4.3 estão representados os subconjuntos
de nós presentes em diferentes níveis hierárquicos S para um espaço bidimensional.
0 0.5 10
0.2
0.4
0.6
0.8
1S = 2
0 0.5 10
0.2
0.4
0.6
0.8
1S = 4
0 0.5 10
0.2
0.4
0.6
0.8
1S = 6
0 0.5 10
0.2
0.4
0.6
0.8
1S = 8
Figura 4.3: Nós de diferentes níveis hierárquicos de grides esparsos.
Os grides expostos na Fig. 4.3 foram obtidos a partir do produto tensorial da
quadratura de Chebyshev conforme o algoritmo de Smolyak. O número de nós que
compõem o nível hierárquico para um espaço bidimensional como o do exemplo é:
S = 2 com 13 nós, S = 4 com 65 nós, S = 6 com 321 nós e S = 8 com 1537
nós. Nota-se que o número de nós cresce rapidamente com o aumento do nível
hierárquico. Felizmente, devido ao caráter hierárquico, os nós dos níveis anteriores
são conservados, ou seja, as simulações realizadas naqueles nós não precisam ser
realizadas novamente e ajudam a compor o próximo nível hierárquico.
Para identificar o nível hierárquico do método de CE que aproxima a solução
com a precisão desejada é interessante definir um critério de convergência a partir
de dois níveis hierárquicos subsequentes. O vetor estocástico das quantidades de
interesse é definido por ZS = [ISA∗, ISF ∗], onde IS é a aproximação polinomial
obtida para a solução no nível hierárquico S. Uma quantidade representativa da
diferença relativa entre as médias e variâncias da aproximação da solução para o
46

nível hierárquico atual e anterior pode ser obtida por
ηmed =||E[ZS]− E[ZS−1]||
||E[ZS]||, ηV ar =
||Var(ZS)−Var(ZS−1)||||Var(ZS)||
, (4.26)
onde E[Z] e Var(Z) são respectivamente a média e a variância para Z obtidos a
partir da amostragem da aproximação polinomial para as funções estocásticas A∗ e
F ∗. Desta forma, pode-se definir um critério de convergência a partir de um valor
máximo para η = [ηmed, ηV ar], ou seja, a convergência para a aproximação da solução
é obtida quando
η < ǫ, (4.27)
onde ǫ é um valor arbitrário. Geralmente, a convergência do valor para a variância
é mais lenta do que para a média, este fato foi observado durante as simulações.
Além do critério de convergência, foi definido um limite para a simulação a
partir de um nível hierárquico máximo Smax. Esta prática é comum em processos
iterativos. Uma vez que, por exemplo, para o gride esparso unidimensional, cada
nível hierárquico tem aproximadamente o dobro de nós do que o nível hierárquico
anterior. Caso os níveis hierárquicos sejam aumentados indefinidamente a simulação
pode ser terminada devido à limites computacionais como a memória disponível.
4.4 Quantificação de Incertezas em Vibrações In-
duzidas por Vórtices
A modelagem do fenômeno de VIV é rica em incertezas. Parte destas incertezas tem
origem em comportamentos aleatórios da natureza, e.g., a velocidade de corrente ou
o movimento das marés, e parte vem da falta de conhecimento na determinação das
quantidades envolvidas no problema, e.g., o valor da massa de fluido adicionada [27].
Logo, é necessário analisar a propagação destas incertezas pelo modelo e identificar
quanto e como elas afetam os resultados para construir uma visão crítica do modelo.
O coeficiente de sustentação Cs0 é obtidos a partir de dados experimentais em
função do número de Reynolds. As incertezas no valor deste parâmetro tem muitas
fontes. Primeiramente os instrumentos utilizados no experimento tem incertezas de
medição, e.g., para definir o número de Reynolds é necessário medir a velocidade do
escoamento com um instrumento e o diâmetro do cilindro com outro instrumento.
Já a densidade e a viscosidade dinâmica do fluido podem ser tabeladas em função
da temperatura, logo se faz necessário medir a temperatura do fluido com outro
instrumento. Mais incertezas são adicionadas a partir de alterações nas condições do
experimento como mudança de temperatura do fluido, instabilidade na velocidade do
escoamento, posição dos instrumentos, etc. Toda esta metodologia de levantamento
47

de incertezas se aplica novamente na medição do coeficiente, que certamente farão
uso de medidores de pressão, células de carga, etc.
No caso do coeficiente de arrasto Ca, utilizado no modelo proposto existe uma
incerteza epistêmica, pois ele é utilizado como uma aproximação para eliminar a
necessidade de inserir uma não-linearidade na dinâmica da estrutura. Então, existe
uma interesse no sentido de avaliar os efeitos desta aproximação.
O conceito de massa adicionada é uma das questões mais complexas da fluido-
dinâmica. Ela se faz presente em todo o escoamento ao redor de corpos rombudos.
Entretanto, como todas as massas, essa grandeza só pode ser medida quando su-
jeita à aceleração. Ela depende de muitos fatores como: o tipo de movimento do
corpo, o escoamento ao redor do corpo, proximidade de outros corpos, superfícies
livres e o tempo. Ela pode ser positiva ou negativa. Os resultados obtidos para
a massa adicionada em escoamentos invíscidos causa a impressão de que eles são
aplicáveis em qualquer caso de escoamento viscoso para toda faixa de número de
Reynolds [102]. Normalmente, nos modelos de análises existentes já consagrados,
esta massa adicionada é considerada como um valor fixo, utilizando para o coefi-
ciente de massa adicionada, valores como, por exemplo, Cm = 1 ou outros valores
semelhantes. Porém, ensaios experimentais para VIV indicaram que o coeficiente de
massa adicionada varia intensamente ao longo do tempo, mesmo em condições de
fluxo uniforme e, tomando-se uma média desses coeficientes, esse valor também varia
com a velocidade reduzida [103]. Em outras palavras, o valor da massa adicionada
é afetada pela aceleração e a viscosidade do fluido [27]. Esta discussão em torno de
como definir um valor e como medir a massa adicionada revela uma incerteza de
natureza epistêmica na sua determinação. Através da Quantificação de Incertezas é
possível identificar se essa incerteza é um ponto crítico para o modelo.
As características da estrutura que podem ser medidas diretamente por instru-
mentos são a massa da estrutura me e o diâmetro d. Estas medições estão sujeitas
a erros comuns causados pela falta de paralelismo e imperfeições na constância do
diâmetro. Considerando uma estrutura marítima estas imperfeições podem ser cau-
sadas pelo processo de fabricação, transporte, armazenamento e lançamento.
O coeficiente de amortecimento estrutural ce, rigidez k são estimados de forma
mais complexa. Devido a não-linearidade, os valores são assumidos constantes para
algumas faixas de projeto que nem sempre são as faixas de operação. Constituindo
assim um foco de incertezas epistêmicas.
A densidade do fluido ρ é, geralmente, assumida constante, no entanto é uma
função da temperatura do fluido. Além da incerteza sobre o ensaio experimental
para determinar os valores da densidade, assumir que o fluido irá operar em uma
determinada temperatura fixa introduz incertezas sobre o valor desta constante.
Uma vez que a temperatura do fluido pode variar tanto com fenômenos localizados
48

quanto com diferentes correntes marinhas.
A análise de incertezas sobre a velocidade da corrente u pode ser utilizada sob
diversas perspectivas. Primeiramente existe o caráter aleatório natural da velocidade
de corrente marinha, o que caracterizaria a Quantificação de Incertezas voltada para
o projeto da estrutura. Outro ponto de vista seria utilizando o fato de que muitos
resultados experimentais visando as características das VIV são dados em função da
velocidade do escoamento do fluido. Então, quando se está procurando aderência
entre os resultados de simulação e dados experimentais é importante notar que
a velocidade do escoamento no ensaio experimental, mesmo que apresentada sem
barras de erro, é inerentemente incerta. Outra forma de interpretar a incerteza sobre
a velocidade de corrente é quando não se tem certeza de quais serão as condições
de operação e como isto irá afetar a resposta do modelo. Assim pode-se utilizar
uma faixa grande de incerteza sobre a velocidade e trabalhar com a estatística dos
resultados.
Ainda existem muitas grandezas físicas que não são contempladas diretamente,
e.g., a rugosidade superficial do cilindro que afeta os valores para os coeficientes
fluidodinâmicos. Consequentemente, quando estamos tentando comparar resultados
de simulação com resultados experimentais sempre existirão incertezas referentes às
condições do experimento e a tentativa de reproduzi-las no ambiente computacional.
Os parâmetros de ajuste do modelo são claramente os que apresentam maiores
incertezas pois não tem uma relação física explícita, i.e., não podem ser medidos
diretamente. Logo, são ajustados a partir de outras grandezas combinadas, o que de
certa forma aumentam a incerteza. Este tipo de prática demonstra claramente a falta
de conhecimento sobre a física do problema, caracterizando um foco de incertezas
epistêmicas.
A Quantificação de Incertezas sobre os parâmetros de ajuste do modelo são
as mais interessantes para obter maior credibilidade sobre o modelo, pois a partir
dos seus efeitos na resposta da simulação é possível identificar a potencialidade do
modelo na reprodução do fenômeno.
4.5 Implementação numérica
As rotinas necessárias para executar esta proposta foram todas desenvolvidas no
programa MATLABr. Na integração numérica das equações, exposição gráfica
dos resultados, entre outras tarefas, foram utilizadas rotinas próprias do programa.
Para a interpolação e geração dos grides esparsos foi utilizado um pacote de desen-
volvido para MATLAB em [104, 105]. Este pacote inclui rotinas configuráveis para
a interpolação polinomial hierárquica de grides esparsos pelo algoritmo de Smolyak.
A Fig. 4.4 apresenta um esquema com os pontos principais para o algoritmo
49

elaborado. O algoritmo tem início a partir da entrada dos dados sobre variáveis
incertezas, variáveis determinísticas e parâmetros da configuração da análise, como
o tempo final e condições iniciais da integração, o número de pontos de velocidade
reduzida que serão analisados, o nível hierárquico máximo para os grides esparsos
Smax, valor para o critério de precisão ǫ, entre outros.
Figura 4.4: Esquema para o algoritmo elaborado.
As seguintes atividades são realizadas para cada velocidade reduzida prevista
na análise. Primeiramente, é verificado se o nível hierárquico máximo foi atingido,
caso negativo são gerados os nós adicionais ao gride esparso para o nível hierárquico
atual. Desta forma, tem início a integração numérica de cada nó adicionado ao gride
esparso a partir da rotina ode45, que utiliza o método Runge-Kutta explícito com
o par Dormand-Prince [106]. Assim que todos os nós foram integrados numerica-
mente, o espaço da solução contendo as funções estocásticas A∗ e F ∗ é aproximado
através de uma interpolação polinomial. Através da amostragem quasi-randômica
da aproximação polinomial para o espaço da solução são calculadas a média e a
variância para a A∗ e F ∗ neste nível hierárquico. Desta forma é possível verificar se
o critério de convergência foi atingido, caso positivo o vetor com as quantidades de
interesse Z é armazenado, caso contrário um nível hierárquico adicional é calculado.
Assim que todos os pontos da velocidade reduzida foram analisados, resta apenas
uma etapa de pós-processamento. Na etapa de pós-processamento, os dados são
organizados para expor os resultados na forma de gráficos. As funções densidade
de probabilidade podem ser obtidas a partir da amostragem quasi-randômica da
aproximação polinomial do espaço da solução.
50

Capítulo 5
Resultados e Discussões
Neste capítulo são apresentados os resultados para o problema proposto no capítulo
anterior. Alguns testes são utilizados para avaliar o desempenho do código compu-
tacional desenvolvido. Em seguida, são apresentados resultados e discussões para a
proposta de Quantificação de Incertezas em VIV.
Como visto anteriormente, o fenômeno de VIV possui dois comportamentos dis-
tintos para baixa e alta razão mássica. No entanto, o modelo para VIV adotado
apresenta baixo desempenho para sistemas com baixa razão mássica [53]. Desta
forma, para os casos estudados são adotados os parâmetros de um sistema com alta
razão mássica m∗ = 320 a partir de [37]. A escolha desse valor para a razão mássica
também é motivada pela existência de mais de um conjunto de dados experimentais
para VIV utilizando esse parâmetro de razão mássica. Razões de massa alta são,
geralmente, associadas às estruturas submetidas a VIV cujo escoamento tem como
fluido o ar, e.g., pontes e chaminés. Nas estruturas marítimas a razão mássica é em
torno de m∗ ≈ O(10) [107].
As variáveis de entrada foram ajustadas de forma que o fenômeno, apesar das
incertezas, se desenvolva num ambiente com número de Reynolds na faixa subcrítica.
Os valores nominais utilizados estão expostos na Tab. 5.1 de acordo com o Sistema
Internacional de Unidades.
St Ca Cs0 Cm κ ε ρ u me k ce d0,2 2,0 0,3 1 12 0,3 1000 0,5 2513,274 2521,128 3,933 0,1
Tabela 5.1: Valores nominais adotados.
Assumindo que o fluido é a água, a viscosidade cinemática é ν = 1 × 10−6 e o
número de Reynolds nominal resultante é Re = 5 × 104. Desta forma, o uso dos
coeficientes fluidodinâmicos obtidos para a região subcrítica é consistente. Alguns
dos parâmetros foram arbitrados para que a frequência natural do sistema seja
fn = 1.
51

5.1 Desempenho computacional
Nesta seção são apresentados resultados de alguns testes realizados que visam veri-
ficar e avaliar o desempenho da implementação do modelo. Para tanto, são feitas
comparações com trabalhos publicados e testes de caráter numérico. Além do mais,
estes testes são importantes para identificar possíveis limitações da simulação nu-
mérica e avaliar o tempo computacional necessário para a solução.
O início da dinâmica do sistema acontece a partir da arbitragem de uma condição
inicial não-nula. Esta condição inicial pode se apresentar a partir da velocidade ou
deslocamento da estrutura ou da esteira. Para simplificar a análise, é arbitrado um
valor para a condição inicial do deslocamento da esteira, denominado q0, mantendo
todas as outras condições iniciais nulas. Desta forma busca-se observar como a
resposta do sistema é alterada devido aos diferentes valores para as condições iniciais,
principalmente depois de atingir o regime estacionário.
A partir desta proposta foram escolhidos três valores para q0 de diferentes ordens
de grandeza: q0 = 0,001, q0 = 0,1 e q0 = 10. Apesar da diferença entre os valores
escolhidos espera-se que, devido às características do modelo, os resultados não
apresentem diferença em período e amplitude após o final do regime transiente
da resposta. Para ilustrar estas idéias, a Fig. 5.1 apresenta duas janelas temporais
retiradas dos primeiros e dos últimos instantes da resposta temporal do deslocamento
da estrutura y∗ para auxiliar na análise.
Dos resultados é possível observar que as mudanças nas condições iniciais tem
influência sobre o início da resposta temporal do problema, durante o regime tran-
siente. Mas, assim que o sistema atinge o regime permanente este se comporta com
a mesma amplitude e período para as diferentes condições iniciais. Sendo assim, é
possível inferir que as mudanças nas condições iniciais afetam a duração do regime
transiente. Como o interesse está voltado para resultados acerca do regime perma-
nente, é desejada a condição inicial que atinja o regime permanente com o menor
tempo de integração possível.
Tendo em vista que para a integração numérica do sistema está sendo utilizado
a rotina ode45 do MATLAB, é interessante utilizar a condição inicial que apresenta
menos passos de integração no intervalo de tempo proposto. Entretanto, esta tarefa
se torna complicada na medida que, durante a Quantificação de Incertezas, o modelo
deverá ser integrado diversas vezes para diferentes valores das variáveis de entrada.
Consequentemente, as respostas serão distintas e encontrar uma condição inicial
ótima se torna complexo.
Apesar da discussão, a escolha da condição inicial não traz maiores problemas
do que alguns poucos passos a mais na integração numérica do sistema. Então,
para os resultados apresentados a seguir será utilizado o valor q0 = 0,001. Pois,
52

0 10 20 30 40 50−0.01
−0.005
0
0.005
0.01
t*
y*
2950 2960 2970 2980 2990 3000−0.2
−0.1
0
0.1
t*
y*
Figura 5.1: Resultados para o deslocamento da estrutura y∗ para diferentes valoresde condição inicial. Os resultados foram marcados para q0 = 0,001 (·), q0 = 0,1 (·−)e q0 = 10 (−).
aparentemente a rotina de integração numérica ode45 apreciou a evolução suave da
resposta utilizando menos passos de integração para cobrir o intervalo de tempo.
5.1.1 Comportamento na integração temporal
Um dos diagramas mais característicos na análise das VIV é o que relaciona a
amplitude e a frequência reduzida de vibração em função da velocidade reduzida.
Para obter esse diagrama é necessário realizar a integração temporal do modelo para
um número finito de velocidades reduzidas e a partir do regime permanente obter
os valores para a amplitude e frequência reduzida de vibração. Logo, foi realizado
um estudo sobre as características da resposta temporal do modelo associado aos
valores da velocidade reduzida.
A Fig. 5.2 apresenta o comportamento do sistema adotado para o estudo. Para
tanto, a faixa de velocidade reduzida entre u∗ = 4 e u∗ = 6 foi dividida em 100
pontos. Para cada ponto o sistema foi integrado até o tempo final de t∗f = 5000. A
região de sincronização é caracterizada pela amplitude de vibração elevada.
A resposta temporal do sistema muda de comportamento quando a velocidade
reduzida se aproxima das zonas de sincronização, onde a amplitude de vibração sofre
um salto abrupto. A Fig. 5.3 é característica da resposta temporal distante da região
53

4 4.5 5 5.5 60
0.05
0.1
0.15
0.2
u*
a*
Figura 5.2: Simulação da amplitude reduzida de vibração do sistema em função davelocidade reduzida.
de sincronização.
0 1000 2000 3000 4000 5000−10
−5
0
5
x 10−4
t*
y*
u*=4
Figura 5.3: Resposta temporal distante da zona de sincronização.
Ao se aproximar da região de sincronização, o padrão da resposta temporal vai
se modificando em direção ao que está representado na Fig. 5.4. As amplitudes de
vibração ainda são pequenas, o que caracteriza que o sistema ainda está fora da
zona de sincronização. Por mais que se refine a discretização em torno do início
da sincronização ou se aumente o tempo final de integração, não foi possível obter
um ponto intermediário entre as amplitudes de vibração do ramo inicial e do ramo
superior.
No ponto da velocidade reduzida seguinte, a amplitude de vibração aumenta
abruptamente ao entrar na região de sincronização e o padrão da resposta temporal
se apresenta como na Fig. 5.5. O tempo de integração deve ser suficientemente alto
para que o sistema ultrapasse o regime transiente, assim possibilitando a apropriação
dos dados corretos sobre a amplitude e frequência de vibração. Este comportamento
se mantém durante todo o regime de sincronização. Estas mudanças de comporta-
mento se repetem da mesma forma ao sair da zona de sincronização.
A partir da Fig. 5.5 é possível afirmar que o tempo de integração deve ser no
mínimo 4000 para que seja desenvolvido o comportamento periódico. A obtenção
54

0 1000 2000 3000 4000 5000−0.01
−0.005
0
0.005
0.01
t*
y*
u*=4.7677
Figura 5.4: Resposta temporal próxima da zona de sincronização.
0 1000 2000 3000 4000 5000−0.2
−0.1
0
0.1
t*
y*
u*=4.7879
Figura 5.5: Resposta temporal na zona de sincronização.
da amplitude e da frequência de vibração é feita a partir de um intervalo próximo ao
tempo final da simulação. Dentro desse intervalo, a amplitude de vibração é obtida
a partir de um algoritmo que busca o deslocamento máximo absoluto da resposta
temporal e a frequência de vibração é obtida a partir de um algoritmo empregando
a Transformada de Fourier do deslocamento da estrutura.
As medidas tomadas se mostraram eficientes para obter da melhor forma possí-
vel estes dados essenciais para a Quantificação de Incertezas. No entanto, caso as
condições de razão mássica sejam muito diferentes é necessário rever o tempo final
de integração.
5.1.2 Reprodução do comportamento experimental
O objetivo desta análise é verificar se o modelo utilizado captura as características
observadas experimentalmente para o fenômeno das VIV. Na Fig. 5.6 estão reprodu-
zidos os resultados experimentais para o caso em quem∗ = 320 e (m∗+Cm)ζ = 0,251.
Os dados experimentais marcados por () foram obtidos por [108] apud [37], para
um cilindro circular livre para vibrar na direção transversal exposto às VIV devido
ao escoamento de ar. Já, os dados experimentais marcados por (•) foram obtidos
recentemente na tentativa de reproduzir este experimento utilizando a água como
55

fluido [37].
Figura 5.6: Resultados experimentais para m∗ = 320 e (m∗ + Cm)ζ = 0,251 [37].
As simulações do modelo levaram aos resultados expostos na Fig. 5.7. Para tanto,
é escolhida uma faixa de velocidades reduzidas tal que 4 < u∗ < 6. Na simulação,
a faixa de velocidades reduzidas foi dividida em 100 pontos igualmente espaçados,
para cada ponto as equações do modelo foram integradas numericamente até atingir
o regime permanente. Os resultados para a amplitude reduzida e frequência reduzida
de vibração foram obtidos dentro deste regime.
4 4.5 5 5.5 60
0.1
0.2
u*
a*
4 4.5 5 5.5 60.9
1
1.1
1.2
u*
f*
Figura 5.7: Resultados a partir da simulação do modelo para m∗ = 320 e (m∗ +Cm)ξ = 0,251.
Nota-se que a concordância entre os resultados obtidos experimentalmente e
através da simulação do modelo apresentam algumas discrepâncias quanto a ampli-
tude e extensão da sincronização. Entretanto, é possível que através do ajuste dos
56

parâmetros κ e ε, o modelo seja capaz de apresentar maior aderência aos resulta-
dos observados experimentalmente. De fato, a investigação sobre as capacidades do
modelo é um dos objetivos da Quantificação de Incertezas.
A frequência reduzida apresenta uma oscilação em torno do valor f ∗ = 1 durante
a sincronização. De forma que, a sincronização no modelo fica melhor caracterizada
pela grande amplitude de vibração. Logo, nos resultados apresentados na sequência,
o gráfico da frequência reduzida será suprimida sempre que não apresentar nenhum
resultado significativo.
5.1.3 Avaliação do método de CE
O desempenho do método de CE para o presente problema é avaliado a partir de uma
comparação com o método de MC. Para esta proposta, é escolhida a propagação de
uma incerteza sobre a velocidade de corrente. Desta forma, a velocidade de corrente
é uma variável incerta dada por
u ≡ U(θ) = U + σUξ(θ), (5.1)
onde U = 0,5 é o valor nominal, σU = 1/10√
12 é o desvio padrão e ξ é uma variável
estocástica com distribuição uniforme de média nula e desvio padrão unitário. Esta
modelagem estocástica, faz com que a velocidade de corrente incerta tenha chances
iguais de assumir valores dentro da faixa 0,45 < U < 0,55. Lembrando que a
partir da Eq. 2.9 é possível obter uma relação entre a velocidade de corrente u e
a velocidade reduzida u∗, o valor nominal para U implica em u∗ = 5. Para esta
velocidade reduzida o sistema se encontra em sincronização conforme a Fig. 5.7.
A precisão adotada é ǫ = 1×10−2 para a diferença relativa entre a variância de A∗
de dois níveis subsequentes. No caso do método de MC, os níveis são considerados
a cada 100 amostragens quasi-randômicas e, para o caso do método de CE, são
considerados os níveis hierárquicos S. Os resultados estão apresentados na Tab. 5.2.
Nota-se que, como em muitos casos de problemas probabilísticos, a convergência para
o valor médio é mais rápida do que para a variância. O critério de convergência foi
atingido pelo método de CE com o nível hierárquico S = 8 composto por 257 nós,
enquanto pelo método de Monte Carlo foram necessários 900 amostragens. Para
a mesma precisão, o método de CE realizou aproximadamente três vezes menos
simulações do que o método de MC. Esta característica foi verificada para outros
valores nominais da velocidade de corrente incerta mantendo a mesma variância.
Isto é uma grande vantagem caso o tempo computacional para resolver o modelo
determinístico seja elevado. Além do mais o método de CE realiza uma aproximação
polinomial da solução, ou seja, além de obter uma aproximação para a média e a
variância da variável estocástica, é possível através da amostragem quasi-randômica
57

obter uma função densidade de probabilidade para as realizações de A∗.
E[A∗] Var(A∗) PontosMC 0,0678 0,0040 900CE 0,0671 0,0039 257
Tabela 5.2: Comparação entre os métodos de MC e CE
Ainda para esta variável incerta, um outro estudo foi realizado. Alguns méto-
dos de resolução de equações estocásticas apresentam divergência para o valor da
variância conforme a evolução da integração temporal [93]. Para verificar a im-
plementação da metodologia proposta, foi realizado um estudo sobre a evolução
temporal da variância para o deslocamento de y∗. Neste estudo foi considerado
como correto a evolução da variância obtida através do método de MC com 1× 103
simulações. A precisão exigida para a convergência foi que a diferença relativa entra
a variância obtida pelo método de MC e pelo método de CE para todos os pontos,
t∗i ∈ [4900, 5000], i = 1, . . . ,100, fossem menores do que ǫ = 1× 10−2. O método de
CE atingiu a convergência no nível hierárquico S = 8 com 257 nós.
A escolha do método de CE para a propagação de incertezas através deste modelo
se mostrou adequada e conveniente. Uma vez que um número de simulações menor
do que pelo método de MC foi necessária para obter o mesmo nível de precisão nos
primeiros momentos estatísticos.
5.2 Análise crítica do modelo
A Quantificação de Incertezas é utilizada para obter uma visão crítica do modelo.
Em se tratando de um sistema não-linear, a análise direta sobre a relação das va-
riáveis de entrada com a resposta para a quantidade de interesse é complexa. Uma
maneira de tratar este problema segue a metodologia proposta pela Quantificação
de Incertezas. Através da propagação de incertezas sobre as variáveis de entrada, é
possível verificar os efeitos no resultado para a quantidade de interesse.
As análises apresentadas abaixo adotam alguns procedimentos em comum. As
análises são realizadas a partir de dados obtidos para um intervalo de velocidades
reduzidas de 4 < u∗ < 6, discretizado em 100 pontos igualmente espaçados. Para
cada ponto u∗i , as variáveis incertas são propagadas através do modelo até que o
critério de convergência, dado pela Eq. 4.27, ou o nível hierárquico máximo seja
atingido. Adota-se o valor para a precisão ǫ = 1×10−2 e o nível hierárquico máximo
Smax = 12.
As variáveis incertas X são descritas genericamente por
X(θ) = X + σXξ(θ), (5.2)
58
onde X são as médias, σX são os desvios padrões e ξ são variáveis estocásticas com
distribuição uniforme de média nula e desvio padrão unitário. A modelagem da
variável incerta através de uma distribuição uniforme se dá ao fato de que a análise
realizada é de interesse investigativo. Desta forma, para caracterizar uma variável
incerta basta escolher o intervalo de valores que ela pode assumir.
Os resultados são apresentados na forma de gráficos relacionando a amplitude de
vibração reduzida A∗ com a velocidade reduzida U∗. As linhas tracejadas indicam
o envelope dos resultados obtidos nas simulações, ou seja, a área entre estas duas
linhas indica resultados possíveis. Neste mesmo gráfico, os marcadores (•) são as
realizações obtidas a partir do valor nominal da variável incerta, ou seja, quando ξ =
0. A média e uma variabilidade para a amplitude de vibração reduzida computada
estão representadas na forma de barras de erro, onde o marcador (•) representa a
média dos resultados e a barra de erro representa uma variabilidade dada por 10%
do desvio padrão para mais e para menos.
Algumas funções densidade de probabilidade são apresentadas para a zona de
sincronização através de amostragem quasi-randômica da solução. Esta prática é
possível devido ao fato de que no método de CE, a solução estocástica é aproximada
por uma interpolação polinomial. Estes dados serão obtidos considerando que a
sincronização ocorre quando a∗ > 0,05. Esta prática pode ser enunciada da seguinte
forma: Dado um sistema com variáveis incertas que está em sincronização, a chance
de ocorrência de um dado evento é expressa através da respectiva função densidade
de probabilidade. A interpretação estatística implica em uma probabilidade condi-
cional, ou seja, a probabilidade de ocorrer um evento, dado que o sistema está em
sincronização. Alguns exemplos de como fazer uso desta informação são discutidos
para cada caso em particular.
5.2.1 Incerteza associada à velocidade de corrente
Os motivos para caracterizar a velocidade de corrente como uma variável incerta já
foram discutidos no capítulo anterior. Na presente análise, a modelagem da incerteza
sobre a velocidade de corrente é feita para avaliar os efeitos da sua variabilidade sobre
a resposta da quantidade de interesse. Desta forma, será adotado uma média e um
desvio padrão com valores para a finalidade de investigação.
Para cada ponto u∗i , a velocidade de corrente Ui é uma variável incerta dada por
Ui(θ) = Ui + σUξ(θ), (5.3)
onde Ui = u∗i /10 é a média, σU = 1/10√
12 é o desvio padrão e ξ é uma variável
estocástica com distribuição uniforme de média nula e desvio padrão unitário. Isto
faz com que a modelagem da incerteza sobre a velocidade de corrente seja diferente
59

para cada ponto da velocidade reduzida u∗i . No entanto, para qualquer ponto u∗ia variabilidade de U é a mesma. A variabilidade é escolhida de forma arbitrária
tomando 10% do valor nominal da velocidade de corrente para mais e para menos.
Para esta modelagem de incerteza sobre a velocidade de corrente, o nível hierárquico
médio necessário para atingir o critério de convergência foi S = 8. Somando os nós
dos grides esparsos de cada incremento u∗i , foram resolvidos 70756 nós no processo
de propagação de incertezas pelo método de CE.
A Fig. 5.8 resume algumas informações importantes obtidas com a Quantificação
de Incertezas. É possível observar que a incerteza sobre a velocidade de corrente age
como uma translação nos resultados, movendo a curva das amplitudes de vibração
obtidas a partir do valor nominal da variável incerta para frente e para trás. Isto
é devido ao fato de que a variável dependente do gráfico é uma função linear da
variável incerta em questão. Como conclusão, é possível dizer que a incerteza sobre
a velocidade de corrente não modifica a amplitude máxima de vibração do sistema,
mas estende a região de sincronização.
4 4.5 5 5.5 60
0.05
0.1
0.15
0.2
a*
u*
Figura 5.8: Envelope da amplitude reduzida de vibração devido à velocidade decorrente incerta.
A Fig. 5.9 apresenta a média e a variabilidade para os resultados da amplitude
de vibração reduzida computada. A velocidade de corrente incerta provocou maior
variabilidade sobre a amplitude de vibração nas proximidades e durante a sincroniza-
ção. Isto é devido ao fato de que em toda essa região a incerteza sobre a velocidade
de corrente pode implicar ou não na existência da sincronização, caso esteja em
sincronização as amplitude são muito altas, caso não esteja em sincronização as am-
plitudes são muito baixas. Por este motivo a variabilidade dos resultados é alta. Das
Fig. 5.8 e Fig. 5.9, observa-se que o resultado para o valor nominal da velocidade
60

de corrente incerta não é o mesmo que a média dos resultados. Esta conclusão por
si só revela a importância da Quantificação de Incertezas para melhor entender um
modelo.
4 4.5 5 5.5 60
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
a*
u*
Figura 5.9: Média e variabilidade da amplitude reduzida de vibração devido à velo-cidade de corrente incerta.
A análise determinística tradicional apresentaria apenas as informações como
na Fig. 5.7. A Quantificação de Incertezas apresenta informações adicionais mo-
dificando o panorama da simulação numérica. Por exemplo, considerando a incer-
teza sobre a velocidade de corrente como uma variabilidade identificada no sistema,
quando a velocidade reduzida é u∗ = 4,7677, uma análise determinística para o va-
lor nominal da velocidade de corrente apresenta amplitude reduzida de vibração da
ordem de a∗ ≈ O(10−3), Fig. 5.4. No entanto, considerando a variabilidade proposta
sobre o valor nominal para a velocidade de corrente, a média dos resultados para a
amplitude reduzida de vibração é da ordem de a∗ ≈ O(10−2), Fig. 5.9. Embora esta
diferença de uma ordem de grandeza possa parecer pequena, ela pode causar grandes
impactos caso este modelo seja utilizado como parte da análise da vida em fadiga
de uma estrutura. Caso na análise de vida em fadiga da estrutura seja utilizada a
abordagem de Quantificação de Incertezas, até mesmo a variabilidade da amplitude
reduzida de vibração em torno da média se torna importante. Inclusive, neste caso,
uma informação adicional pode ser obtida a partir da amostragem quasi-randômica
da aproximação polinomial para a solução estocástica de A∗: a função densidade de
probabilidade para a ocorrência de uma amplitude reduzida de vibração para uma
dada velocidade reduzida. A Fig. 5.10 apresenta a função densidade de probabili-
dade para u∗ = 4,7677. Esta informação pode ser usada como dado de entrada no
modelo de análise da vida em fadiga de estruturas.
61

0 0.05 0.1 0.150
50
100
150
200
250
a*
Dis
trib
uiç
ão d
e P
roba
bilid
ad
e
u*=4,7677
Figura 5.10: Função densidade de probabilidade da amplitude reduzida de vibraçãodevido à velocidade de corrente incerta quando u∗ = 4,7677.
As amplitudes reduzidas de vibração se acumulam no ramo inferior e no ramo
superior, como foi comentado anteriormente. A densidade de probabilidade para
ocorrência de amplitudes reduzidas numa grande faixa é nula. Isto reforça a hipótese
de que a∗ > 0,05 implica no sistema em sincronização.
A Fig. 5.11 apresenta duas funções densidade de probabilidade obtidas para o
sistema em sincronização. Isto caracteriza uma probabilidade condicional, ou seja,
a probabilidade de uma realização de um valor de amplitude reduzida de vibração
ou velocidade reduzida dado que o sistema se encontra em sincronização.
As funções densidade de probabilidade da Fig. 5.11 estão associadas a uma de-
terminada variabilidade sobre a velocidade de corrente. A partir das distribuições de
probabilidade é possível fazer afirmações como: a probabilidade de que a velocidade
reduzida do sistema em sincronização seja menor do que 5 é de 45,98% ou a proba-
bilidade de que a amplitude de vibração reduzida para o sistema em sincronização
seja maior do que 0,13 e menor do que 0,14 é de 48,24%. Este tipo de recurso é
interessante para a tomada de decisões e apresentação formal dos resultados.
As funções densidade de probabilidade complementam os resultados apresenta-
dos na Fig. 5.8 e Fig. 5.9. Estas distribuições confirmam que as amplitudes redu-
zidas de vibração dentro do envelope de resultados se concentram no ramo supe-
rior durante a sincronização, onde 99,25% dos resultados se concentram na faixa
0,11 < a∗ < 0,14, e apresentam informações sobre a densidade de probabilidade
para a ocorrência destes valores. O mesmo ocorre para a velocidade reduzida, onde
a função densidade de probabilidade complementa informações sobre a extensão da
zona de sincronização com a densidade de ocorrências para valores da velocidade
62

0.05 0.1 0.15 0.20
20
40
60
80
a*
4 4.5 5 5.5 60
0.5
1
1.5
u*
Figura 5.11: Funções densidade de probabilidade da velocidade reduzida e da am-plitude reduzida de vibração devido à velocidade de corrente incerta dado que osistema está em sincronização.
reduzida.
A análise realizada apresenta algumas características de uma análise de sensi-
bilidade [19]. A Quantificação de Incertezas se mostrou uma ferramenta útil para
obter informações sobre a relação da velocidade de corrente com a quantidade de
interesse.
5.2.2 Incerteza associada aos parâmetros de ajuste do mo-
delo κ e ε
As variáveis de entrada κ e ε são dois parâmetros de ajuste do modelo. A inves-
tigação das incertezas sobre estas variáveis pode trazer muitas informações acerca
da capacidade do modelo reproduzir características observadas experimentalmente.
A análise investiga as variáveis incertas individualmente e em conjunto. A partir
desta metodologia, busca-se não só obter mais informações sobre a sensibilidade da
quantidade de interesse à estes parâmetros, mas também utilizar a Quantificação de
Incertezas como ferramenta para aumentar a credibilidade no modelo.
A modelagem de incertezas para as variáveis κ e ε são baseadas no ajuste rea-
lizado em [15]. A motivação foi a variabilidade dos dados experimentais utilizados
para ajustar os parâmetros. A Fig. 5.12 apresenta uma proposta para os limites dos
valores para os parâmetros de ajuste baseados na contemplação da variabilidade dos
dados experimentais. O intervalo de valores para as das variáveis incertas foi arbi-
trado como 50% do valor nominal para mais e para menos. As duas curvas obtidas
63

foram estimadas a partir de uma equação utilizada para para realizar o ajuste em
[15].
Figura 5.12: Nova proposta de ajuste para os parâmetros como variáveis incertaslimitadas pelas curvas: (·−) para κ = 18 e ε = 0,2 e (· · −) para κ = 6 e ε = 0,4
Embora a modelagem para estas duas variáveis tenha sido motivada pela atuação
de forma conjunta, é interessante avaliar como cada uma delas impacta individual-
mente sob a quantidade de interesse.
Incerteza associada ao parâmetro de ajuste κ
Está análise assume κ como uma variável incerta dada por
κ(θ) = κ + σκξ(θ), (5.4)
onde κ = 12 é a média, σκ = 12/√
12 é o desvio padrão e ξ é uma variável estocástica
com distribuição uniforme de média nula e desvio padrão unitário. Desta forma, a
variável incerta κ(θ) é modelada através de uma função densidade de probabilidade
uniforme, ou seja, κ(θ) tem iguais chances de assumir valores na faixa 6 < κ < 18.
Para esta Quantificação de Incertezas, o nível hierárquico médio necessário para
atingir o critério de convergência foi S = 9. No total, foram resolvidos 115812 nós
neste processo de propagação de incertezas.
A Fig. 5.13 apresenta o envelope dos resultados da amplitude reduzida de vibra-
ção. É possível observar que os efeitos da incerteza sobre o parâmetro κ(θ) agem
como uma amplificação e redução dos resultados para o valor nominal, tanto para a
amplitude reduzida de vibração, como para a extensão zona de sincronização. Desta
forma, é possível afirmar que esta variável incerta tem efeito sobre a amplitude má-
xima de vibração e a extensão da faixa de sincronização.
64

4 4.5 5 5.5 60
0.05
0.1
0.15
0.2
a*
u*
Figura 5.13: Envelope da amplitude reduzida de vibração devido a κ(θ).
A Fig. 5.14 apresenta média e a variabilidade para a amplitude de vibração
reduzida computada. A incerteza sobre o parâmetro de ajuste κ(θ) provocou maior
variabilidade sobre a amplitude de vibração nas nas proximidades da entrada e da
saída da sincronização.
4 4.5 5 5.5 60
0.02
0.04
0.06
0.08
0.1
0.12
0.14
a*
u*
Figura 5.14: Média e variabilidade de A∗ devido a κ(θ).
Das Fig. 5.13 e Fig. 5.14, observa-se que o resultado da amplitude reduzida de
vibração para o valor nominal de κ(θ) é muito próximo dos resultados para a média
em grande parte da zona de sincronização. Isto sugere que os efeitos da variabi-
lidade simétrica sobre o valor nominal de κ(θ) refletem em uma leve simetria no
65

efeitos sobre a amplitude reduzida de vibração. Nas zonas de entrada e saída da
zona de sincronização, a média dos resultados difere do resultado para o valor nomi-
nal. Isto pode ser devido ao fato de que os resultados ora em sincronização e ora fora
de sincronização refletem em amplitudes de vibração de magnitudes muito diferen-
tes. Consequentemente, reduzindo o valor da média dos resultados e aumentando a
variabilidade nestas regiões.
As funções densidade de probabilidade da Fig. 5.15 estão associadas a uma de-
terminada variabilidade sobre o parâmetro de ajuste do modelo κ(θ). Entretanto,
algumas informações podem ser obtidas a partir da análise das distribuições. A
partir do gráfico da distribuição das amplitudes de vibração durante a sincronização
é possível notar uma leve simetria ao redor do valor obtido para o valor médio, como
foi sugerido antes.
4 4.5 5 5.5 60
1
2
u*
0.05 0.1 0.15 0.20
10
20
30
a*
Figura 5.15: Funções densidade de probabilidade da velocidade reduzida e da ampli-tude reduzida de vibração devido a κ(θ) dado que o sistema está em sincronização.
As funções densidade de probabilidade estão associadas à variabilidade adotada
para κ(θ). A partir das distribuições de probabilidade é possível fazer afirmações
como, a probabilidade de que a velocidade reduzida do sistema em sincronização
seja menor do que 5 é de 41,29% ou média da amplitude de vibração reduzida do
sistema em sincronização é a∗ = 0,129.
O parâmetro de ajuste κ está ligado à amplificação do forçamento da esteira.
De maneira intuitiva, é possível dizer que a incerteza sobre este parâmetro acarreta
em mudanças na amplitude de vibração. No entanto, a partir da Quantificação de
Incertezas observa-se é possível afirmar que o valor para κ também tem efeito sobre
a extensão da zona de sincronização.
66

Incerteza associada ao parâmetro de ajuste ε
Esta análise assume ε como uma variável incerta dada por
ε(θ) = ε+ σεξ(θ), (5.5)
onde ε = 0,3 é a média, σε = 2/10√
12 é o desvio padrão e ξ é uma variável esto-
cástica com distribuição uniforme de média nula e desvio padrão unitário. Desta
forma, a variável incerta ε(θ) é modelada através de uma função densidade de pro-
babilidade uniforme, ou seja, ε(θ) tem iguais chances de assumir valores na faixa
0,2 < ε < 0,4. Para esta Quantificação de Incertezas, o nível hierárquico médio ne-
cessário para atingir o critério de convergência foi S = 9. No total, foram resolvidos
141924 nós neste processo de propagação de incertezas.
A Fig. 5.16 apresenta o envelope dos resultados para a amplitude reduzida de
vibração. É possível observar que a incerteza sobre o parâmetro ε(θ) favorece o
aumento da amplitude máxima de vibração assim como um leve deslocamento da
faixa de sincronização para velocidades reduzidas mais elevadas.
4 4.5 5 5.5 60
0.05
0.1
0.15
0.2
a*
u*
Figura 5.16: Envelope da amplitude reduzida de vibração devido a ε(θ).
A Fig. 5.17 apresenta média e a variabilidade para a amplitude de vibração
reduzida computada. A incerteza sobre o parâmetro de ajuste ε(θ) provocou maior
variabilidade sobre a amplitude de vibração nas proximidades da entrada e da saída
da sincronização.
As funções densidade de probabilidade da Fig. 5.18 estão associadas a uma de-
terminada variabilidade sobre o parâmetro de ajuste do modelo ε(θ). Assim como
para a incerteza sobre o parâmetro κ(θ), a partir do gráfico da distribuição das am-
67

4 4.5 5 5.5 60
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
a*
u*
Figura 5.17: Média e variabilidade de A∗ devido a ε(θ).
plitudes de vibração durante a sincronização é possível notar uma leve simetria em
torno do valor referente ao pico de densidade de probabilidade.
4 4.5 5 5.5 60
1
2
u*
0.05 0.1 0.15 0.20
20
40
60
a*
Figura 5.18: Funções densidade de probabilidade da velocidade reduzida e da ampli-tude reduzida de vibração devido a ε(θ) dado que o sistema está em sincronização.
A variabilidade sobre o parâmetro de ajuste ε(θ) tem influências na amplitude
máxima de vibração e na faixa de sincronização.
68

Incerteza associada à ambos os parâmetros de ajuste
A Quantificação de Incertezas é realizada assumindo que existem incertezas sobre
ambos os parâmetros de ajuste do modelo. Desta forma as variáveis incertas serão
dadas por
κ(θ) = κ+ σκξ1(θ), ε(θ) = ε+ σεξ2(θ), (5.6)
onde κ = 12 é a média de κ(θ), σκ = 12/√
12 é o desvio padrão de κ(θ), ε = 0,3
é a média de ε(θ), σε = 2/10√
12 é o desvio padrão de ε(θ), ξ1 e ξ2 são duas
variáveis estocásticas estatisticamente independentes com distribuição uniforme de
média nula e desvio padrão unitário.
A hipótese de independência estatística das variáveis estocásticas parece razoável,
uma vez que os parâmetros de ajuste do modelo não são associados diretamente à
nenhuma grandeza física. Desta forma, seria muito difícil inferir algum tipo de
correlação entre os dois parâmetros.
Devido a este problema envolver duas variáveis estocásticas, o número de nós
compondo cada nível hierárquico é alto, por exemplo, nos problemas unidimensionais
anteriores o nível hierárquico máximo computado foi Smax = 12, que é composto por
4097 nós. Já para o problema bidimensional, o mesmo nível hierárquico é composto
por 32769 nós, ou seja, aproximadamente 8 vezes mais nós e consequentemente,
o tempo de computação aumenta muito. Para reduzir o tempo de simulação, o
nível hierárquico máximo permitido foi Smax = 10, que é composto por 7169 nós.
Como consequência, algumas vezes o nível hierárquico máximo foi atingido antes
que critério de convergência η < 1× 10−2 fosse satisfeito. No total, foram resolvidos
628580 nós neste processo de propagação de incertezas.
A Fig. 5.19 apresenta o envelope dos resultados para a amplitude reduzida de
vibração. É possível observar que os efeitos das incertezas em conjunto não é apenas
uma justaposição dos resultados anteriores. A combinação das incertezas sobre os
parâmetros de ajuste implicou em variações na amplitude reduzida de vibração e na
extensão da zona de sincronização.
A Fig. 5.20 apresenta média e a variabilidade para a amplitude de vibração
reduzida. Estes resultados se parecem muito com o da Fig. 5.14 obtida para a
variável incerta κ(θ). O valor médio para os resultados é muito próximo ao resultado
obtido para o valor nominal das variáveis incertas.
Das Fig. 5.19 e Fig. 5.20, observa-se que o resultado para os valores nominais das
variáveis incertas é muito próximo do que para a média dos resultados em grande
parte da zona de sincronização.
As funções densidade de probabilidade da Fig. 5.21 estão associadas a uma de-
terminada variabilidade sobre os parâmetros de ajuste do modelo κ(θ) e ε(θ). Di-
ferentemente dos resultados obtidos para as duas variáveis incertas consideradas de
69

4 4.5 5 5.5 60
0.05
0.1
0.15
0.2
a*
u*
Figura 5.19: Envelope da amplitude reduzida de vibração devido a κ(θ) e ε(θ).
4 4.5 5 5.5 60
0.02
0.04
0.06
0.08
0.1
0.12
0.14
a*
u*
Figura 5.20: Média e variabilidade da amplitude reduzida de vibração devido a κ(θ)e ε(θ).
forma individual, a função densidade de probabilidade para a amplitude reduzida
de vibração não aparenta simetria. A distribuição de probabilidade apresenta boa
densidade de probabilidade de ocorrência para valores mais elevados da amplitude
reduzida de vibração do que para as incertezas consideradas de forma individual.
A tentativa de contemplar a dispersão dos dados experimentais revelou que o
comportamento do modelo apresenta na média um resultado muito próximo do
que para o valor nominal das variáveis. No entanto, a Fig. 5.19 mostra que as
possibilidades para a resposta do modelo são muito diferentes para os casos extremos
70
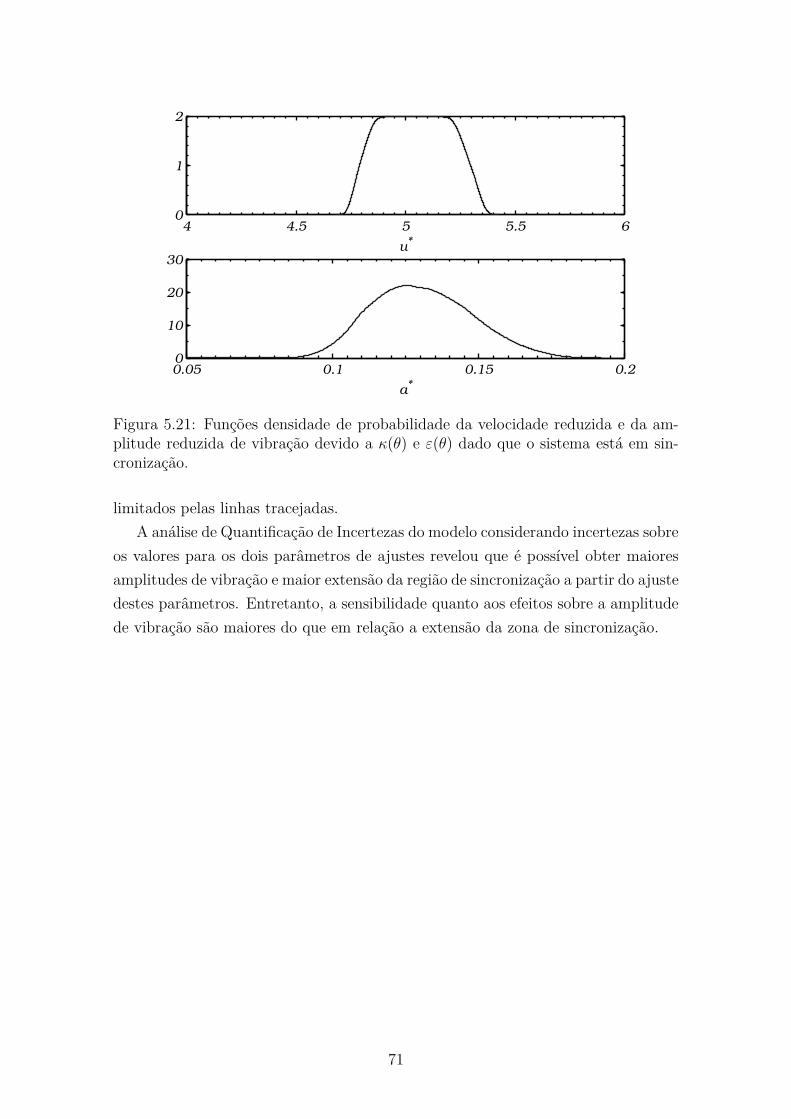
0.05 0.1 0.15 0.20
10
20
30
a*
4 4.5 5 5.5 60
1
2
u*
Figura 5.21: Funções densidade de probabilidade da velocidade reduzida e da am-plitude reduzida de vibração devido a κ(θ) e ε(θ) dado que o sistema está em sin-cronização.
limitados pelas linhas tracejadas.
A análise de Quantificação de Incertezas do modelo considerando incertezas sobre
os valores para os dois parâmetros de ajustes revelou que é possível obter maiores
amplitudes de vibração e maior extensão da região de sincronização a partir do ajuste
destes parâmetros. Entretanto, a sensibilidade quanto aos efeitos sobre a amplitude
de vibração são maiores do que em relação a extensão da zona de sincronização.
71
Capítulo 6
Conclusões
Muitos tipos de estruturas submetidas a correntes marinhas ou vento podem sofrer
VIV, e.g., prédios altos, chaminés, pontes, risers e estruturas marítimas em geral.
A esbeltez e a flexibilidade de algumas destas estruturas são agravantes para o
problema. Nas aplicações de estruturas marítimas, a predição das VIV em estruturas
esbeltas são verdadeiros desafios para os projetistas. Nestes casos é preciso levar em
conta as VIV como causa potencial de dano em fadiga [6, 7].
A metodologia de Quantificação de Incertezas foi aplicada nas predições do fenô-
meno de VIV. Para tanto foi considerado um modelo fenomenológico baseado no
oscilador de van der Pol com variáveis de entrada incertas. A propagação das incer-
tezas através do modelo foi realizada sob uma abordagem probabilística utilizando
o método de Colocação Estocástica baseado nos grides esparsos de Smolyak.
A simplicidade do modelo para as previsões de VIV possibilitou um grande nú-
mero de simulações com precisão adequada. Foram analisadas características qua-
litativas do modelo para o caso de alta razão mássica, que permitiram obter mais
informações com o objetivo de aumentar a credibilidade do modelo.
A incerteza sobre a velocidade de corrente reflete na extensão da zona de sincro-
nização, no entanto, a amplitude máxima de vibração do sistema permanece inal-
terada. Já a incerteza sobre os parâmetros de ajuste κ(θ) e ε(θ) provocam efeitos
tanto na amplitude máxima de vibração, como na extensão da faixa de sincroniza-
ção. Logo, o modelo apresenta potencial para apresentar maior aderência com os
dados experimentais a partir do ajuste destes parâmetros, em especial para os casos
de alta razão mássica.
O método de CE se mostrou eficiente para a propagação de incertezas atra-
vés do modelo possibilitando a extração de informações relevantes a partir do pós-
processamento dos resultados. As funções densidade de probabilidade obtidas para
a zona de sincronização complementaram as informações dos gráficos de envelope e
barras de erro.
A aplicação da metodologia de Quantificação de Incertezas forneceu informações
72

adicionais relevantes sobre o desempenho de um modelo para previsão de VIV. Tam-
bém foi apresentado que pequenas incertezas sobre as variáveis de entrada podem
refletir em mudanças no comportamento do sistema. Desta forma, evidenciando a
necessidade da aplicação da Quantificação de Incertezas para aumentar a credibili-
dade em modelos e simulações de problemas em Engenharia.
Como propostas para trabalhos futuros seria interessante empregar a metodo-
logia de Quantificação de Incertezas para as outras variáveis do modelo proposto.
Encontrando, desta forma, os efeitos de cada incerteza sobre o comportamento do
sistema.
Outro fator importante é obter dados experimentais de maior significância, pos-
sibilitando conclusões mais confiáveis sobre a capacidade do modelo reproduzir o
comportamento experimental a partir da simulação computacional. Também é inte-
ressante empregar outros modelos fenomenológicos semelhantes de predição para as
VIV. Muitos modelos são propostos com não-linearidades na dinâmica da estrutura,
o que pode mudar de forma significativa o comportamento do sistema.
A eficiência do método de propagação de incertezas pode ser explorada a partir
do emprego do método de CE adaptativo proposto em [93]. Este método utiliza
polinômios de suporte local para capturar grandes gradientes ou descontinuidades,
aumentando a taxa de convergência e fornecendo uma medida de erro local. Isto
poderia acelerar as simulações e permitir que mais variáveis estocásticas fossem
adicionadas em conjunto nas análises.
Além de apresentar as conclusões sobre a Quantificação de Incertezas do modelo
adotado, este trabalho cobre aspectos importantes sobre o fenômeno de VIV e sobre
a metodologia de Quantificação de Incertezas. Desta forma, pode ser usado como
ponto de partida para estudos mais específicos.
73

Referências Bibliográficas
[1] PETTIT, C. L., BERAN, P. S. “Spectral and multiresolution Wiener expansi-
ons of oscillatory stochastic processes”, Journal of Sound and Vibration,
v. 294, pp. 752–779, 2006.
[2] KANEKO, S., TOMOMICHI, N., INADA, F. Flow-Induced Vibrations: Classi-
fications And Lessons From Practical Experiences. Elsevier Science Pu-
blishing Company, 2008.
[3] MUKUNDAN, H. Vortex-induced vibration of marine risers: motion and force
reconstruction from field and experimental data. Tese de Doutorado, Mas-
sachusets Institute of Technology, 2008.
[4] Disponível em: <http://diariodopresal.files.wordpress.com/2009/01/
plataformas-sistema-de-producao-peq.jpg>. Acesso em: 1 de no-
vembro de 2010.
[5] RIVA, I. Análise de Vibrações Induzidas por Desprendimento de Vortices no Do-
mínio da Freqüência Considerando Variação da Massa Adicionada. Tese
de Mestrado, Universidade Federal do Rio de Janeiro, COPPE, 2008.
[6] MUKUNDAN, H., MODARRES-SADEGHI, Y., DAHL, J. M., HOVER, F. S.,
TRIANTAFYLLOU, M. S. “Monitoring VIV fatigue damage on marine
risers”, Journal of Fluids and Structures, v. 25, pp. 617–628, 2009.
[7] BAARHOLM, G. S., LARSEN, C. M., LIE, H. “On fatigue damage accumulation
from in-line and cross-flow vortex-induced vibrations on risers”, Journal
of Fluids and Structures, v. 22, pp. 109–127, 2006.
[8] STROUHAL, V. “Über eine Besondere Art der Tonerregung”. In: Annalen der
Physik und Chemie, v. 5, pp. 216–251, 1878.
[9] RAYLEIGH, L. “Acoustical Observations”. In: Philosophical Magazine, v. 7, pp.
149–162, 1879.
[10] BIRKHOFF, G., ZARANTONELLO, E. H. Jets, Wakes and Cavities. Acade-
mic Press, 1957.
74

[11] MARZOUK, O. A. Simulation, Modeling, and Characterization of the Wakes
of Fixed and Moving Cylinders. Tese de Doutorado, Virginia Polytechnic
Institute and State University, 2009.
[12] BISHOP, R. E. D., HASSAN, A. Y. “The Lift and Drag Forces on a Circular
Cylinder in a Flowing Fluid”. In: Proceedings of the Royal Society Series
A, v. 277, pp. 32–50, 1964.
[13] NAYFEH, A. Introduction to perturbation techniques. Wiley, 1993.
[14] NAYFEH, A. H., OWIS, F., HAJJ, M. R. “A Model for the Coupled Lift and
Drag on a Circular Cylinder”. In: ASME International Design Enginee-
ring Technical Conferences & Computers and Information in Engineering
Conference, 2003.
[15] FACCHINETTI, M., DE LANGRE, E., BIOLLEY, F. “Coupling of Structure
and Wake Oscillators in Vortex-Induced Vibrations”, Journal of Fluids
and Structures, v. 19, pp. 123–140, 2004.
[16] OBERKAMPF, W. L., DELAND, S. M., RUTHERFORD, B. M., DIEGERT,
K. V., ALVIN, K. F. “Error and uncertainty in modeling and simulation”,
Reliability Engineering & System Safety, v. 75, pp. 333–357, 2002.
[17] KIUREGHIAN, A. D., DITLEVSEN, O. “Aleatory or epistemic? Does it
matter?” Structural Safety, v. 31, pp. 105–112, 2009.
[18] ELISHAKOFF, I. “Notes on philosophy of the Monte Carlo method”, Interna-
tional Applied Mechanics, v. 39, pp. 753–762, 2003.
[19] CACUCI, D. G. Sensitivity and uncertainty analysis. CRC Press, 2003.
[20] ROBERT, C. The Bayesian Choice: From Decision-theoretic Foundations to
Computational Implementation (Springer Texts in Statistics). Springer-
Verlag, 2007.
[21] XIU, D., KARNIADAKIS, G. E. “The Wiener-Askey polynomial chaos for
stochastic differential equations”, SIAM Journal of Scientific Computing,
v. 24, pp. 619–644, 2002.
[22] XIU, D. “Efficient collocational approach for parametric uncertainty analysis”,
Communications in Computational Physics, v. 2, pp. 293–309, 2007.
[23] The Specialist Committee on Vortex Induced Vibrations Committee Final Report
and Recommendations to the 25th ITTC, 2008.
75

[24] LUCOR, D., XIU, D., SU, C. H., KARNIADAKIS, G. E. “Predictability and
uncertainty in CFD”, International Journal for Numerical Methods in
Fluids, v. 43, pp. 483–505, 2003.
[25] LUCOR, D., KARNIADAKIS, G. E. “Predictability and uncertainty in flow-
structure interactions”, European Journal of Mechanics B/Fluids, v. 23,
pp. 41–49, 2004.
[26] LUCOR, D., TRIANTAFYLLOU, M. S. “Parametric study of a two degree-of-
freedom cylinder subject to vortex-induced vibrations”, Journal of Fluids
and Structures, v. 24, pp. 1284–1293, 2008.
[27] SARPKAYA, T. “A critical review of the intrinsic nature of vortex-induced
vibrations”, Journal of Fluids and Structures, v. 19, pp. 389–447, 2004.
[28] SUMER, B. M., FREDSØE, J. Hydrodynamics around cylindrical structures.
World Scientific Publishing Co. Pre. Ltd., 2006.
[29] DYKE, M. Album of Fluid Motion. Parabolic Press Incorporated, 1982.
[30] WILLIAMSON, C. H. K. “Oblique and parallel modes of vortex shedding in
the wake of a circular cylinder at low Reynolds number.” Journal of Fluid
Mechanics, v. 206, pp. 579–627, 1989.
[31] ROSHKO, A. “Experiments on the flow past a circular cylinder at very high
Reynolds number.” Journal of Fluid Mechanics, v. 10, pp. 345–356, 1961.
[32] SCHEWE, G. “On the force fluctuations acting on a circular cylinder in cross-
flow from subcritical up to transcritical Reynolds numbers.” Journal of
Fluid Mechanics, v. 133, pp. 265–285, 1983.
[33] WILLIAMSON, C. H. K., GOVARDHAN, R. “A brief review of recent results in
vortex-induced vibrations”, Journal of Wind Engineering and Industrial
Aerodynamics, v. 96, pp. 713–735, 2008.
[34] MORISON, J. R., O’BRIEN, M. P., JOHNSON, J. W., SCHAAF, S. A.
“The Force Exerted by Surface Waves on Piles”, Petroleum Transacti-
ons, AIME, v. 189, pp. 149–154, 1950.
[35] VANDIVER, J. K., JONG, J.-Y. “The Relationship Between In-Line and Cross-
Flow Vortex-Induced Vibration of Cylinders”, Journal of Fuids and Struc-
tures, v. 1, pp. 381–399, 1987.
76

[36] DAHL, J. M., HOVER, F. S., TRIANTAFYLLOU, M. S. “Two-degree-of-
freedom vortex-induced vibrations using a force assisted apparatus”, Jour-
nal of Fluids and Structures, v. 22, pp. 807–818, 2006.
[37] GOVARDHAN, R., WILLIAMSON, C. H. K. “Modes of vortex formation
and frequency response of a freely vibrating cylinder”, Journal of Fluid
Mechanics, v. 420, pp. 85–130, 2000.
[38] MORSE, T. L., WILLIAMSON, C. H. K. “Fluid forcing, wake modes, and
transitions for a cylinder undergoing controlled oscillations”, Journal of
Fluids and Structures, v. 25, pp. 697–712, 2009.
[39] KHALAK, A., WILLIAMSON, C. H. K. “Fluid forces and dynamics of a
hydroelastic structure with very low mass and damping”, Journal of Fluids
and Structures, v. 11, pp. 973–982, 1997.
[40] KHALAK, A., WILLIAMSON, C. H. K. “Motions, forces and mode transitions
in vortex-induced vibrations at low mass-damping”, Journal of Fluids and
Structures, v. 13, pp. 813–851, 1999.
[41] KHALAK, A., WILLIAMSON, C. H. K. “Investigation of relative effects of
mass and damping in vortex-induced vibration of a circular cylinder”,
Journal of Wind Engineering and Industrial Aerodynamics, v. 69-71,
pp. 341–350, 1997.
[42] GOVARDHAN, R., WILLIAMSON, C. H. K. “Critical mass term in vortex-
induced vibration of a cylinder”, European Journal of Mechanics -
B/Fluids, v. 23, pp. 17–27, 2004.
[43] LARSEN, C., HALSE, K. “Comparison of models for vortex induced vibrations
of slender marine structures”, Marine Structures, v. 10, pp. 413–441, 1997.
[44] CHAPLIN, J. R., BEARMAN, P. W., CHENG, Y., FONTAINE, E.,
GRAHAM, J. M. R., HERFJORD, K., HUERA HUARTE, F. J.,
ISHERWOOD, M., LAMBRAKOS, K., LARSEN, C. M., MENEGHINI,
J. R., MOE, G., PATTENDEN, R. J., TRIANTAFYLLOU, M. S., WILL-
DEN, R. H. J. “Blind predictions of laboratory measurements of vortex-
induced vibrations of a tension riser”, Journal of Fluids and Structures,
v. 21, pp. 25–40, 2005.
[45] SKOP, R., BALASUBRAMANIAN, S. “A new twist on and old model for
vortex-excited vibrations”, Journal of Fluids and Structures, v. 11,
pp. 395–412, 1997.
77

[46] KRENK, S., NIELSEN, S. “Energy balanced double oscillator model for vortex-
induced vibrations”, ASCE Journal of Engineering Mechanics, v. 125,
pp. 263–271, 1999.
[47] SKOP, R. A., LUO, G. “An inverse-direct method for predicting the vortex-
induced vibrations of cylinders in uniform and nonuniform flows”, Journal
of Fluids and Structures, v. 15, pp. 867–884, 2001.
[48] PLASCHKO, P. “Global chaos in flow-induced oscillations of cylinders”, Jour-
nal of Fluids and Structures, v. 14, pp. 883–893, 2000.
[49] MATHELIN, L., DE LANGRE, E. “Vortex-induced vibrations and waves under
shear flow with a wake oscillator model”, European Journal of Mechanics
- B/Fluids, v. 24, pp. 478–490, 2005.
[50] VIOLETTE, R., DE LANGRE, E., SZYDLOWSKI, J. “Computation of vortex-
induced vibrations of long structures using a wake oscillator model: Com-
parison with DNS and experiments”, Computer and Structures, v. 85,
pp. 1134–1141, 2007.
[51] XU, W., ZENG, X., WU, Y. “High aspect ratio (L/D) riser VIV prediction
using wake oscillator model”, Ocean Engineering, v. 35, pp. 1769–1774,
2008.
[52] LIN, L., LING, G., WU, Y. “Nonlinear fluid damping in structure-wake oscilla-
tors in modeling vortex-induced vibrations”, Journal of Hydrodynamics,
v. 21, pp. 1–11, 2009.
[53] FARSHIDIANFAR, A., ZANGANEH, H. “A modified wake oscillator model for
vortex-induced vibration of circular cylinders for a wide range of mass-
damping ratio”, Journal of Fluids and Structures, v. 26, pp. 430–441,
2010.
[54] KEBER, M., WIERCIGROCH, M. “Dynamics of a vertical riser with weak
structural nonlinearity excited by wakes”, Journal of Sound and Vibration,
v. 315, pp. 685–699, 2008.
[55] EVANGELINOS, C., KARNIADAKIS, G. “Dynamics and flow structures in
the turbulent wake of rigid and flexible cylinders subject to vortex-induced
vibrations”, Journal of Fluid Mechanics, v. 400, pp. 91–124, 1999.
[56] EVANGELINOS, C., LUCOR, D., KARNIADAKIS, G. “DNS-derived force
distribution on flexible cylinders subject to vortex-induced vibration”,
Journal of Fluids and Structures, v. 14, pp. 429–440, 2000.
78

[57] DONG, S., KARNIADAKIS, G. “DNS of flow past a stationary and oscillating
cylinder at Re = 10 000”, Journal of Fluids and Structures, v. 20, pp. 519–
531, 2005.
[58] LUCOR, D., MUKUNDAN, H., TRIANTAFYLLOU, M. S. “Riser modal iden-
tification in CFD and full-scale experiments”, Journal of Fluids and Struc-
tures, v. 22, pp. 905–917, 2006.
[59] AL-JAMAL, H., DALTON, C. “Vortex-induced vibrations using large eddy si-
mulation at a moderate Reynolds number”, Journal of Fluids and Struc-
tures, v. 19, pp. 73–92, 2004.
[60] WILLDEN, R. H. J., GRAHAM, J. M. R. “Multi-modal Vortex-Induced Vibra-
tions of a vertical riser pipe subject to a uniform current profile”, European
Journal of Mechanics B/Fluids, v. 23, pp. 209–218, 2004.
[61] YAMAMOTO, C. T., MENEGHINI, J. R., SALTARA, F., FREGONESI,
R. A., FERRARI JR., J. A. “Numerical simulations of vortex-induced
vibration on flexible cylinders”, Journal of Fluids and Structures, v. 19,
pp. 467–498, 2004.
[62] PAN, Z. Y., CUIB, W. C., MIAO, Q. M. “Numerical simulation of vortex-
induced vibration of a circular cylinder at low mass-damping using RANS
code”, Journal of Fluids and Structures, v. 23, pp. 23–37, 2007.
[63] ON VORTEX INDUCED VIBRATIONS COMMITTEE, T. S. C. “Final Re-
port and Recommendations to the 25th ITTC”. In: Proceedings of 25th
ITTC, 2008.
[64] DE ROCQUIGNY, E., DEVICTOR, N., TARANTOLA, S. Uncertainty in
industrial practice: a guied to quantitative uncertainty management. John
Wiley & Sons Ltd, 2008.
[65] CONSTANTINESCU, E. M., ZAVALA, V. M., ROCKLIN, M., LEE, S., ANI-
TESCU, M. “A Computational Framework for Uncertainty Quantification
and Stochastic Optimization in Unit Commitment with Wind Power Ge-
neration.” IEEE Transactions on Power Systems, In Press, 2010.
[66] SCHUËLLER, G. I., JENSEN, H. A. “Computational Methods in Optimization
Considering Uncertainties”, Computer Methods in Applied Mechanics and
Engineering, v. 198, pp. 2–13, 2008.
79

[67] LIN, G., TARTAKOVSKY, A. M., TARTAKOVSKY, D. M. “Uncertainty
quantification via random domain decomposition and probabilistic col-
location on sparse grids”, Journal of Computational Physics, v. 229,
pp. 6995–7012, 2010.
[68] BRESSOLETTE, P., FOGLI, M., CHAUVIÈRE, C. “A stochastic collocation
method for large classes of mechanical problems with uncertain parame-
ters”, Probabilistic Engineering Mechanics, v. 25, pp. 255–270, 2010.
[69] LE MAÎTRE, O. P., KNIO, O. M. Spectral Methods for Uncertainty Quantifi-
cation. Springer, 2010.
[70] OBERKAMPF, W. L., BARONE, M. F. “Measures of agreement between com-
putation and experiment: Validation metrics”, Journal of Computational
Physics, v. 217, pp. 5–36, 2006.
[71] SUDRET, B. Uncertainty propagation and sensitivity analysis in mechani-
cal models: Contributions to structural reliability and stochastic spectral
methods. Relatório técnico, Universitè Blaise Pascal - Clermont II, 2007.
[72] BENAROYA, H., HAN, S. Probability Models in Engineering and Science. CRC
Press, 2005.
[73] AVEN, T. “Some reflections on uncertainty analysis and management”, Relia-
bility Engineering and System Safety, v. 95, pp. 195–201, 2010.
[74] GOLLER, B., PRADLWARTER, H. J., SCHUËLLER, G. I. “Robust model
updating with insufficient data”, Computer Methods in Applied Mechanics
and Engineering, v. 198, pp. 3096–3104, 2009.
[75] BOX, G. E. P. “Sampling and Bayes’ Inference in Scientific Modelling and
Robustness”, Journal of the Royal Statistical Society, v. 143, pp. 383–430,
1980.
[76] GHANEM, R. G., DOOSTAN, A., RED-HORSE, J. “A probabilistic construc-
tion of model validation”, Computer Methods in Applied Mechanics and
Engineering, v. 197, pp. 2585–2595, 2008.
[77] OBERKAMPF, W. L., TRUCANO, T. G. “Verification and validation in
computational fluid dynamics”, Progress in Aerospace Sciences, v. 38,
pp. 209–272, 2002.
[78] MODARRES, M., KAMINSKIY, M., KRIVTSOV, V. Reliability Engineering
and Risk Analysis. CRC Press, 1999.
80

[79] SIMOLA, K., MENGOLINI, A., BOLADO-LAVIN, R. Formal Expert Jud-
gement: An overview. Relatório técnico, European Commission Joint
Research Centre Report EUR 21772 EN, 2005.
[80] COVER, T. M., THOMAS, J. A. Elements of Information Theory. Wiley-
Interscience, 2006.
[81] HELTON, J. C., JOHNSON, J., OBERKAMPF, W., SALLABERRY, C. “Sen-
sitivity analysis in conjunction with evidence theory representations of
epistemic uncertainty”, Reliability Engineering & System Safety, v. 91,
pp. 1414–1434, 2006.
[82] GHANEM, R., SPANOS, P. D. Stochastic Finite Elements: A Spectral Appro-
ach. New York, Springer-Verlag, 1991.
[83] WIENER, N. “The Homogeneous Chaos”, American Journal of Mathematics,
v. 60, pp. 897–936, 1938.
[84] BABUSKA, I., TEMPONE, R., ZOURARIS, G. E. “Galerkin finite elements
approximation of stochastic finite elements”, SIAM Journal of Numerical
Analysis, v. 42, pp. 800–825, 2004.
[85] WAN, X., KARNIADAKIS, G. E. “An adaptive multi-element generalized
polynomial chaos method for stochastic differential equations”, Journal
of Computational Physics, v. 209, pp. 617–642, 2005.
[86] WAN, X., KARNIADAKIS, G. E. “Multi-element generalized polynomial chaos
for arbitrary probability measures”, SIAM Journal Scientific Computing,
v. 28, pp. 901–928, 2006.
[87] WAN, X., KARNIADAKIS, G. E. “Long-term behavior of polynomial chaos
in stochastic flow simulations”, Computer Methods in Applied Mechanics
and Engineering, v. 195, pp. 41–43, 2006.
[88] ASOKAN, B. V., ZABARAS, N. “Using stochastic analysis to capture unstable
equilibrium in natural convection”, Journal of Computational Physics,
v. 208, pp. 134–153, 2005.
[89] BABUSKA, I., NOBILE, F., TEMPONE, R. “A stochastic collocation method
for elliptic partial differential equations with random input data”, SIAM
Journal on Numerical Analysis, v. 45, pp. 1005–1034, 2007.
[90] SMOLYAK, S. “Quadrature and iterpolation formulas for tensor product of
certain classes of functions”, Soviet Mathematics Doklady, v. 4, pp. 240–
243, 1963.
81
[91] XIU, D., HESTHAVEN, J. S. “High order collocation methods for the differen-
tial equation with random inputs”, SIAM Journal of Scientific Computing,
v. 27, pp. 1118–1139, 2005.
[92] NOBILE, F., TEMPONE, R., WEBSTER, C. “A sparse grid collocation
method for elliptic partial differential equations with random input data”,
SIAM Journal on Numerial Analysis, v. 45, pp. 2309–2345, 2008.
[93] MA, X., ZABARAS, N. “An adaptive hierarchical sparse grid collocation al-
gorithm for the solution of stochastic differential equations”, Journal of
Computational Physics, v. 228, pp. 3084–3113, 2009.
[94] XIU, D. “Fast numerical methods for stochastic computations: a review”,
Communications in Computational Physics, v. 5, pp. 242–272, 2009.
[95] BLEVINS, R. Flow-Induced Vibrations. New York, Van Nostrand Reinhold,
1990.
[96] PARKINSON, G. “Phenomena and modeling of flow-induced vibrations of bluff
bodies”, Progress in Aerospace Sciences, v. 26, pp. 169–224, 1989.
[97] BAI, Y. Pipelines and Risers. Elsevier Science Ltd, 2001.
[98] GANAPATHYSUBRAMANIAN, B., ZABARAS, N. “Sparse grid collocation
schemes for stochastic natural convection problems”, Journal of Compu-
tational Physics, v. 225, pp. 652–685, 2007.
[99] OSKENDAL, B. Stochastic Differential Equations: An introduction with appli-
cations. Springer-Verlag, 1998.
[100] FOO, J., WAN, X., KARNIADAKIS, G. E. “The multi-element probabilistic
collocation method (ME-PCM): Error analysis and applications”, Journal
of Computational Physics, v. 227, pp. 9572–9595, 2008.
[101] KLIMKE, W. A. Uncertainty Modeling using Fuzzy Arithmetic and Sparse
Grids. Tese de Doutorado, Universidade de Stuttgart, 2006.
[102] LEONARD, A., ROSHKO, A. “Aspects of flow-induced vibration”, Journal
of Fluids and Structures, v. 15, pp. 415–425, 2001.
[103] GOPALKRISHNAN, R. Vortex-induced forces on oscillating bluff cylinders.
Tese de Doutorado, Massachusets Institute of Technology, 1993.
[104] KLIMKE, A., WOHLMUTH, B. “Algorithm 847: spinterp: Piecewise Multi-
linear Hierarchical Sparse Grid Interpolation in MATLAB”, ACM Tran-
sactions on Mathematical Software, v. 31, n. 4, 2005.
82

[105] KLIMKE, A. Sparse Grid Interpolation Toolbox – User’s Guide. Relatório
Técnico IANS report 2007/017, University of Stuttgart, 2007.
[106] SHAMPINE, L. F., REICHELT, M. W. “The MATLAB ODE Suite”, SIAM
Journal on Scientific Computing, v. 18, pp. 1–22, 1997.
[107] JAUVTIS, N., WILLIAMSON, C. H. K. “Vortex-induced vibration of a cylin-
der with two degrees of freedom”, Journal of Fluids and Structures, v. 17,
pp. 1035–1042, 2003.
[108] FENG, C. C. The measurements of vortex-induced effects in flow past a stati-
onary and oscillating circular and D-section cylinders. Tese de Mestrado,
University of British Columbia, 1968.
83


















