PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS...
160
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS Programa de Pós-Graduação em Engenharia Mecânica Tarcísio Flávio Umbelino Rêgo VALIDAÇÃO DE METODOLOGIA DE OTIMIZAÇÃO DE CONFORTO EM SIMULADOR DE SUSPENSÃO VEICULAR COM COEFICIENTE DE AMORTECIMENTO VARIÁVEL Belo Horizonte 2011
Transcript of PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS...

PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS
Programa de Pós-Graduação em Engenharia Mecânica
Tarcísio Flávio Umbelino Rêgo
VALIDAÇÃO DE METODOLOGIA DE OTIMIZAÇÃO DE CONFORTO EM SIMULADOR DE SUSPENSÃO VEICULAR COM COEFICIENTE DE
AMORTECIMENTO VARIÁVEL
Belo Horizonte
2011

Tarcísio Flávio Umbelino Rêgo
VALIDAÇÃO DE METODOLOGIA DE OTIMIZAÇÃO DE CONFORTO EM SIMULADOR DE SUSPENSÃO VEICULAR COM COEFICIENTE DE
AMORTECIMENTO VARIÁVEL Tese apresentada ao Programa de Pós-Graduação em Engenharia Mecânica da Pontifícia Universidade Católica de Minas Gerais como requisito parcial para obtenção do título de Doutor em Engenharia Mecânica.
Orientador: Jánes Landre Júnior
Belo Horizonte
2011

FICHA CATALOGRÁFICA
Elaborada pela Biblioteca da Pontifícia Universidade Católica de Minas Gerais
Rêgo, Tarcísio Flávio Umbelino
R343v Validação de metodologia de otimização de conforto em simulador de
suspensão veicular com coeficiente de amortecimento variável / Tarcísio Flávio
Umbelino Rêgo. Belo Horizonte, 2011.
150f. : il.
Orientador: Jánes Landre Júnior
Tese (Doutorado) – Pontifícia Universidade Católica de Minas Gerais.
Programa de Pós-Graduação em Engenharia Mecânica.
1. Automóveis – Dinâmica. 2. Automóveis – Molas e suspensão. 3.
Automóveis – Amortecedores. I. Landre Júnior, Jánes. II. Pontifícia Universidade
Católica de Minas Gerais. Programa de Pós-Graduação em Engenharia Mecânica.
III. Título.
CDU: 629.113
Tarcísio Flávio Umbelino Rêgo
VALIDAÇÃO DE METODOLOGIA DE OTIMIZAÇÃO DE CONFORTO EM SIMULADOR DE SUSPENSÃO VEICULAR COM COEFICIENTE DE
AMORTECIMENTO VARIÁVEL
Tese apresentada ao Programa de Pós-Graduação em Engenharia Mecânica da Pontifícia Universidade Católica de Minas Gerais como requisito parcial para obtenção do título de Doutor em Engenharia Mecânica.
__________________________________________________
Jánes Landre Júnior (Orientador) – PUC Minas
__________________________________________________
Ernani Sales Palma – UFMG
__________________________________________________
Nilton da Silva Maia – CEFET
__________________________________________________
Claysson Bruno S. Vimieiro– PUC Minas
__________________________________________________
Pedro Américo Almeida Magalhães Júnior – PUC Minas
Belo Horizonte, 20 de dezembro de 2011
AGRADECIMENTOS
Agradeço a Deus pelo dom da vida e ter concedido saúde e paciência para
realizar este trabalho.
Aos meus pais, Attenister e Déa, que estiveram sempre ao meu lado dando
apoio e incentivo; devo tudo a vocês.
À minha noiva, Flávia, que em nenhum momento deixou se abater quando
não pude estar ao seu lado e soube com seu amor e carinho me trazer até aqui;
Amo você.
À minha família, pela paciência e força a mim dedicados.
Ao Professor Jánes Landre pela oportunidade a mim concedida.
Aos meus grandes amigos Pedro e André, sem os quais este trabalho não
teria se realizado.
Aos amigos da TPA Engenharia e PUC-MG.

RESUMO
O presente trabalho teve como objeto de estudo a implementação de uma
metodologia para avaliação do desempenho de um sistema de suspensão semi-
ativo automotivo baseado na variação do coeficiente de amortecimento, com foco no
conforto do condutor e passageiros. Para variação do coeficiente de amortecimento,
foi proposto um amortecedor no qual é possível variar a área de escoamento do
fluido entre a câmara inferior e superior, por meio de um sistema de discos
perfurados. A viabilidade dessa abordagem foi validada com a construção de um
protótipo e de um controle auto-adaptativo. A variação possível do coeficiente de
amortecimento do protótipo e o seu tempo de resposta para abertura e fechamento
foram determinados experimentalmente. Além disso, o protótipo foi avaliado em um
ambiente de testes que permitiu estudar a resposta do amortecedor e do controle
desenvolvidos em variadas condições de excitação. As entradas para o ambiente de
teste foram produzidas por um modelo virtual, com excitação independente nas
quatro rodas, implementado em software, que obtinha do controle as respostas dos
coeficientes de amortecimento a serem utilizados. Com a aplicação dessa
metodologia, constatou-se que o sistema de discos perfurados é capaz de variar o
coeficiente de amortecimento em até 587% em aproximadamente 4,9ms. Mesmo em
cenários que privilegiam o conforto, diante de instabilidades, o controle foi capaz de
estabilizar o veículo. Além disso, verificou-se que a diminuição do coeficiente de
amortecimento deve obedecer a critérios relativos ao momento de atuação para
evitar a inserção de instabilidade no veículo.
Palavras chave: Dinâmica veicular, conforto, coeficiente de amortecimento variável,
controle, suspensão semi-ativa.

ABSTRACT
The present work is concerned with the implementation of a methodology for
performance assessment of a semi-active automotive suspension system based on
the variation of damping coefficient, focused on enhancing vehicle comfort. For
varying the damping coefficient a damper was proposed in which the damping fluid
flow between the inferior and superior chambers is controlled by using a perforated
disc system. The viability of this approach was validated by building a prototype with
self-adaptive control. The prototype’s damping coefficient range and time response
were determined experimentally. The prototype was also evaluated in a test
environment which allowed investigation of response times in different excitation
conditions. The inputs for the test environment were produced by means of a
software-implemented virtual model, which allowed for independent excitation on four
wheels and which was also responsible for reading damping coefficient control
outputs. By applying this methodology it could be verified that the perforated disc
system is capable of varying the damping coefficient in a range of 587% in
approximately 4,9ms. Even in scenarios which privilege ride comfort, in the presence
of instabilities, the control was able to stabilize the vehicle. Furthermore, it was
verified that variation of the damping coefficient must obey certain actuation times in
order to avoid the insertion of instabilities in the vehicle.
Keywords: Vehicle dynamics, comfort, variable damping coefficient, control, semi-
active suspension.

LISTA DE FIGURAS
FIGURA 1 - Corte do conjunto mola e amortecedor. 1) Haste do amortecedor, 2)
Apoio superior da mola helicoidal, 3) Mola auxiliar, 4) Batente superior ,
5) Carroceria, 6) Mola helicoidal, 7) Amortecedor ................................ 13
FIGURA 2 - Feixes de molas: (a) tipo trapezoidal, utilizada em veículos de ............. 14
FIGURA 3 - Molas helicoidais, utilizadas em automóveis leves (veículos de passeio)
............................................................................................................. 15
FIGURA 4 - Mola do tipo barra de torção .................................................................. 17
FIGURA 5 - Amortecedores hidráulicos: (a) tubo simples e (b) tubo duplo .............. 18
FIGURA 6 - Possibilidades de projeto para amortecedores ativos ............................ 22
FIGURA 7 - Circuito hidráulico do amortecedor semi-ativo proposto para caminhões
............................................................................................................. 23
FIGURA 8 – Sistema de controle de malha aberta ................................................... 25
FIGURA 9 – Sistema de controle de malha fechada ................................................. 26
FIGURA 10 – Sistema de controle em malha fechada ............................................. 27
FIGURA 11 – Sistema Realimentado ........................................................................ 28
FIGURA 12 – Diagrama de um sistema realimentado .............................................. 29
FIGURA 13 – Regime transitório .............................................................................. 30
FIGURA 14 – Graus de estabilidade ........................................................................ 31
FIGURA 15 – Sistema de primeira ordem e pólos .................................................... 32
FIGURA 16 – Constante de tempo ........................................................................... 33
FIGURA 17 – Função de transferência e pólo ........................................................... 33
FIGURA 18 – Diagrama de bloco geral ..................................................................... 34
FIGURA 19 – Resposta ao degrau de segunda ordem ............................................. 36
FIGURA 20 – Curva de resposta ao degrau.............................................................. 37
FIGURA 21 – Modelo simplificado do sistema de suspensão automotivo, ............... 39
FIGURA 22 – Configuração idealizada para o controle skyhook ............................... 40
FIGURA 23 – Configuração idealizada do controle groundhook ............................... 41
FIGURA 24 – Gráfico de transmissibilidade x n / ........................................... 43
FIGURA 25 - Fluxograma das atividades .................................................................. 44
FIGURA 26 - Modelo do amortecedor de coeficiente de amortecimento
variável ................................................................................................. 45
FIGURA 27 – Variação da área de passagem com a variação da abertura .............. 47
FIGURA 28 – Figura do amortecedor montado com motor de passo ....................... 48
FIGURA 29 – Desenho esquemático para validação do protótipo do amortecedor .. 50
FIGURA 30 – Esquema da curva de Velocidade x Força ......................................... 51
FIGURA 31 – Modelo a ser simulado ........................................................................ 52
FIGURA 32 – Forças e momentos atuantes sobre o chassis do veículo .................. 53
FIGURA 33 – Relacionamento de incógnitas e CG ................................................... 55
FIGURA 34 – Determinação do ângulo de roll .......................................................... 56
FIGURA 35 – Determinação do ângulo de pitch ....................................................... 57
FIGURA 36 – Fluxograma para solução do modelo proposto ................................... 60
FIGURA 37 – Experimento para determinação do tempo de resposta do amortecedor
.................................................................................................................................. 62
FIGURA 38 – Excitação provocada no sistema de controle para medição do tempo
de resposta ........................................................................................ 63
FIGURA 39 – Placa de Processamento .................................................................... 65
FIGURA 40 – Placa de acionamento ........................................................................ 65
FIGURA 41 – Montagem geral do sistema de controle ............................................. 66
FIGURA 42 - Esquema de ligação do sistema de controle / modelo virtual .............. 67
FIGURA 43 - Fluxograma de funcionamento do algoritmo “auto adaptativo” ............ 69
FIGURA 44 - Fluxograma do software ...................................................................... 72
FIGURA 45 – Software MDV ..................................................................................... 73
FIGURA 46 – Peças obtidas na máquina de prototipagem rápida ............................ 75
FIGURA 47 – (A) Fechamento máximo (B) Posição intermediária (C) Abertura
Máxima .............................................................................................. 76
FIGURA 48 – Sistema de controle de velocidade e aplicação da força .................... 78
FIGURA 49 – Sistema de medição do ângulo de abertura ....................................... 79
FIGURA 50 – Sistema completo para avaliação do protótipo ................................... 80
FIGURA 51 – Gráfico de Força x Velocidade para uma abertura de 16,2º ............... 81
FIGURA 52 – Gráfico de Força x Velocidade para uma abertura de 14,4º ............... 81
FIGURA 53 – Gráfico de Força x Velocidade para uma abertura de 12,6º ............... 82
FIGURA 54 – Gráfico de Força x Velocidade para uma abertura de 9º .................... 82
FIGURA 55 – Gráfico de Força x Velocidade para uma abertura de 7,2° ................. 83
FIGURA 56 – Gráfico de Força x Velocidade para uma abertura de 3,6º ................. 83

FIGURA 57 – Gráfico de Força x Velocidade para uma abertura de 0º .................... 84
FIGURA 58 – Tempo de abertura e fechamento do amortecedor ............................. 85
FIGURA 59 – Tempo de resposta do controle .......................................................... 86
FIGURA 60 – Excitação do tipo impulso ................................................................... 87
FIGURA 61 – Resposta ao impulso com
SX aleatório ........................................... 88
FIGURA 62 – Resposta ao impulso com 0
SX .................................................... 88
FIGURA 63 – Impulso seguido de senóide de frequência = 0,1Hz ........................... 89
FIGURA 64 – Resposta do sistema ao impulso seguido de senóide de frequência de
0,1Hz .................................................................................................. 90
FIGURA 65 – Impulso seguido de senóide de frequência = 1Hz .............................. 91
FIGURA 66 - Resposta do sistema ao impulso seguido de senóide de frequência de
1Hz ....................................................................................................... 91
FIGURA 67 – Impulso seguido de senóide de frequência = 10Hz ............................ 92
FIGURA 68 - Resposta do sistema ao impulso seguido de senóide de frequência de
10Hz. (A) - aleatórioX S
(B) - 0
SX ........................................ 93
FIGURA 69 – Variação do coeficiente do amortecimento em resposta à excitação
com impulso seguido de senóide de 10Hz ........................................... 93
FIGURA 70 – Impulso seguido de senóide de frequência = 100Hz .......................... 94
FIGURA 71 - Resposta do sistema ao impulso seguido de senóide de frequência de
100Hz ................................................................................................... 95
FIGURA 72 – Excitação (Degrau 0,4m) .................................................................... 96
FIGURA 73 – Resposta ao degrau nas quatro rodas (C=300 [N.s/m] ....................... 96
FIGURA 74 – Resposta ao degrau nas quatro rodas (C=1800 [N.s/m]).................... 97
FIGURA 75 – Resposta ao degrau nas rodas dianteiras (C=300 [N.s/m]) ................ 98
FIGURA 76 – Resposta ao degrau nas rodas dianteiras (C=1800 [N.s/m]) .............. 98
FIGURA 77 – Resposta ao degrau nas rodas do lado do motorista .......................... 99
FIGURA 78 – Resposta ao degrau nas rodas do lado do motorista ........................ 100
FIGURA 79 – Excitação (Impulso 0,4m) ................................................................. 101
FIGURA 80 – Resposta ao impulso nas 4 rodas (C=300 [N.s/m]) .......................... 102
FIGURA 81 – Resposta ao impulso nas 4 rodas (C=1800 [N.s/m]) ........................ 102
FIGURA 82 – Resposta ao impulso nas rodas dianteiras (C=300 [N.s/m]) ............. 103

FIGURA 83– Resposta ao impulso nas rodas dianteiras (C=1800 [N.s/m]) ............ 104
FIGURA 84 – Resposta ao degrau nas rodas do lado do motorista ........................ 105
FIGURA 85 – Resposta ao degrau nas rodas do lado do motorista ........................ 106
FIGURA 86 – Excitação (Rampa 1,9°) .................................................................... 107
FIGURA 87 – Resposta à rampa nas 4 rodas (C=300 [N.s/m]) - ............................ 108
FIGURA 88 – Resposta à rampa nas 4 rodas (C=300 [N.s/m]) – Ângulo de pitch .. 108
FIGURA 89 – Resposta à rampa nas 4 rodas (C=1800 [N.s/m]) -Deslocamento
vertical .............................................................................................. 109
FIGURA 90 – Resposta à rampa nas 4 rodas (C=1800 [N.s/m]) – Ângulo de pitch 110
FIGURA 91 – Excitação senoidal de frequência igual a 0,5Hz................................ 111
FIGURA 92 – Excitação senoidal de frequência igual a 1Hz .................................. 111
FIGURA 93 – Excitação senoidal de frequência igual a 10Hz – C=300[N.s/m] ....... 112
FIGURA 94 – Excitação senoidal de frequência igual a 10Hz – C=1800[N.s/m] ..... 113
FIGURA 95 - Resposta ao degrau aplicado nas 4 rodas ........................................ 115
FIGURA 96 – Deslocamento das rodas / Variação do amortecimento para uma
entrada em degrau nas 4 rodas ....................................................... 115
FIGURA 97 - Resposta ao degrau aplicado nas rodas dianteiras ........................... 116
FIGURA 98 - Deslocamento das rodas / Variação do amortecimento para uma
entrada em degrau nas rodas dianteiras. (A) Amortecedor dianteiro
(B) Amortecedor traseiro .................................................................. 117
FIGURA 99 - Resposta ao degrau aplicado nas rodas do lado do motorista .......... 118
FIGURA 100 - Deslocamento das rodas / Variação do amortecimento para uma
entrada em degrau nas rodas do lado do motorista. (A) Amortecedor
lado motorista (B) Amortecedor lado passageiro ............................. 118
FIGURA 101 - Resposta ao impulso aplicado nas 4 rodas ..................................... 119
FIGURA 102 - Deslocamento da suspensão / Amortecimento para excitação impulso
aplicado as 4 rodas .......................................................................... 120
FIGURA 103 - Resposta ao impulso aplicado nas rodas dianteiras ........................ 121
FIGURA 104 - Deslocamento da suspensão / Amortecimento para excitação impulso
(A) Suspensões dianteiras (B) Suspensões traseiras ...................... 121
FIGURA 105 - Resposta ao impulso aplicado nas rodas do lado do motorista ....... 122
FIGURA 106 - Deslocamento da suspensão / Amortecimento para excitação impulso
(A) Suspensões lado motorista (B) Suspensões lado traseiro ......... 123
FIGURA 107 - Resposta a rampa de inclinação igual a 1,9° ................................... 124
FIGURA 108 - Resposta a rampa de inclinação igual a 1,9° (Ângulo de pitch) ....... 124
FIGURA 109 - Deslocamento da suspensão / Amortecimento para excitação rampa
(A) Suspensões dianteira (B) Suspensões traseira .......................... 125
FIGURA 110 - Deslocamento da suspensão / Amortecimento para excitação
senoidal de 0.5Hz ............................................................................ 126
FIGURA 111 – Deslocamento da suspensão / Amortecimento para excitação
senoidal de 1Hz ............................................................................... 127
FIGURA 112 - Deslocamento da suspensão / Amortecimento para excitação
senoidal de 10Hz ............................................................................. 127
FIGURA 113 – Tela principal do software de Supervisão e Parametrização .......... 128
FIGURA 114 – Tela de parametrização do modelo ................................................. 129
FIGURA 115 – Tela de visualização e exportação de resultados ........................... 130
FIGURA 116 – Tela de inserção de obstáculos ...................................................... 131
FIGURA 117 – Obstáculos. (A) Lombada e buraco. (B) Sonorizador ..................... 131
FIGURA 118 – Pista de asfalto importada via arquivo “.txt” .................................... 132
FIGURA 119 – Resposta do deslocamento vertical do veículo ao trafegar pela pista
de asfalto ......................................................................................... 133
FIGURA 120 – Atuação do controle sobre o amortecedor / Deslocamento vertical da
suspensão ao trafegar pela pista de asfalto ..................................... 133
FIGURA 121 – Deslocamento vertical do chassis utilizando o controle de
amortecimento ................................................................................. 134
FIGURA 122 – (A) Obstáculos aplicados do lado do motorista. (B) Obstáculos
aplicados do lado do passageiro ...................................................... 135
FIGURA 123 – (A) Deslocamento da suspensão do lado do motorista com ........... 136
FIGURA 124 – (A) Deslocamento da suspensão do lado do motorista com ........... 136
FIGURA 125 – (A) Deslocamento da suspensão do lado do motorista. (B) Resposta
do sistema de controle do amortecimento ....................................... 137
FIGURA 126 – (A) Deslocamento da suspensão do lado do passageiro. (B)
Resposta do sistema de controle do amortecimento ....................... 137
FIGURA 127 – Deslocamento do chassis. (A) Amortecimento fixo de 300 ............. 138
FIGURA 128 – Ângulo de roll. (A) Amortecimento fixo de 300 N.s/m. (B)
Amortecimento fixo de 1800 N.s/m. (C) Utilizando o controle de
amortecimento ................................................................................. 139
FIGURA 129 – Ângulo de pitch. (A) Amortecimento fixo de 300 N.s/m. (B)
Amortecimento fixo de 1800 N.s/m. (C) Utilizando o controle de
amortecimento ................................................................................. 140

LISTA DE QUADROS
QUADRO 1 Parâmetros utilizados para avaliação e simulação do modelo .............. 61
QUADRO 2 Especificação do microcontrolador utilizado .......................................... 64
QUADRO 3 Abertura x Coeficiente de Amortecimento ............................................. 84
SUMÁRIO
1 INTRODUÇÃO ......................................................................................................... 7
1.1 Objetivo Geral ...................................................................................................... 9 1.2 Objetivos Específicos ......................................................................................... 9 2 REVISÃO BIBLIOGRÁFICA .................................................................................. 10 2.1 Dinâmica Veicular ............................................................................................. 10
2.2 Suspensões Veiculares .................................................................................... 11 2.2.1 Mola ................................................................................................................. 13 2.2.2 Amortecedores ............................................................................................... 17 2.3 Sistemas de Suspensão Semi-Ativos .............................................................. 20
2.4 Conforto e Dirigibilidade ................................................................................... 23 2.5. Elementos de Teoria de Controle ................................................................... 25 2.5.1. Parâmetros a serem analisados em Sistemas de Controle ....................... 29
2.5.2. Sistemas de Primeira e Segunda ordem ..................................................... 31 2.6 Controle de suspensão ..................................................................................... 38 2.7 Transmissibilidade ............................................................................................ 41 3 METODOLOGIA .................................................................................................... 44 3.1. Fluxograma das atividades ............................................................................. 44
3.2. Construção do Amortecedor Variável ............................................................ 45 3.3. Validação do amortecedor proposto .............................................................. 48 3.4 Desenvolvimento Matemático do Modelo a ser Simulado ............................. 52
3.5 Avaliação do Tempo de Resposta ................................................................... 62 3.6 Controle .............................................................................................................. 64
3.7 Modelo Virtual/Software de Supervisão e Parametrização ............................ 70 3.8 Avaliação das Condições de Pista .................................................................. 73 4 RESULTADOS ....................................................................................................... 75 4.1 Avaliação da Variação do Coeficiente de Amortecimento ............................. 75 4.1.1 Protótipo ......................................................................................................... 75
4.1.2 Experimento .................................................................................................... 76 4.1.3 Curvas de amortecimento obtidas ................................................................ 80 4.2 Avaliação do Tempo de Resposta do Amortecedor ....................................... 85 4.3 Avaliação Numérica da Resposta do Modelo ................................................. 95 4.3.1 Aplicação de degrau ...................................................................................... 95
4.3.2 Impulso .......................................................................................................... 100 4.3.3 Rampa ........................................................................................................... 106
4.3.4 Senóide ......................................................................................................... 110 4.4 Avaliação do controle ..................................................................................... 114 4.4.1 Degrau ........................................................................................................... 114 4.4.2 Impulso .......................................................................................................... 119 4.3.3 Rampa ........................................................................................................... 123
4.3.4 Senóide ......................................................................................................... 125 4.5 Modelo Virtual/Software de Supervisão e Parametrização .......................... 128 4.6 Avaliação das Condições de Pista ................................................................ 132 4.7 Análise e Discussões de Resultados ............................................................ 141

5 CONCLUSÕES .................................................................................................... 143 6 TRABALHOS FUTUROS..................................................................................... 144 REFERÊNCIAS ....................................................................................................... 145 APÊNDICE A – DESENHO CONSTRUTIVO DO AMORTECEDOR ...................... 150

7
1 INTRODUÇÃO
As montadoras de veículos em todo o mundo enfrentam no projeto e
desenvolvimento de seus veículos diferentes desafios, tais como: redução de
emissões de gases, redução de ruídos, aumento de segurança, aumento de
conforto, entre outros. Isso cria uma necessidade de constante melhoria em diversos
aspectos de seus produtos, no intuito de atender as expectativas de clientes cada
vez mais exigentes.
Dentre os vários fatores a serem otimizados, que atraem a atenção da
indústria automotiva, pode se destacar o conforto e a dirigibilidade nos automóveis
contemporâneos (BOUAZARA; RICHARD; RAKHEJA, 2006; KYUNG; NUSSBAUM;
BABSKI-REEVES, 2008; KYUNG; NUSSBAUM, 2008). As principais dificuldades
encontradas na maximização de ambos os fatores, em um mesmo veículo, pela
indústria automotiva têm origem no fato de que conforto e dirigibilidade são até certo
ponto antagônicos. Por exemplo, suspensões macias embora elevem o nível de
conforto dos passageiros reduzem a estabilidade do veículo enquanto suspensões
de maior rigidez reduzem o conforto ao mesmo tempo em que o automóvel se torna
mais estável (HROVAT, 1997). Devido ao fato de favorecermos ou o conforto ou a
dirigibilidade, nas suspensões de parâmetros fixos, podemos classificá-las em
suspensões voltadas ao conforto ou suspensões voltadas à dirigibilidade, onde para
a primeira podemos citar os carros de passeio não esportivos e para o segundo caso
veículos esportivos.
Dentre os principais elementos que afetam negativamente o conforto em um
automóvel pode-se destacar o alto índice de ruído, a temperatura e vibração
transmitida aos condutores e passageiros (KOLICH, 2003; RÊGO, 2007). Ruídos e
vibrações distintas são transmitidos ao condutor e passageiros do veículo, quando o
mesmo trafega por pistas distintas. Tendo em vista que a pista é responsável pela
maior parte do desconforto dentro de um automóvel e que a suspensão é
responsável por anular este desconforto, a suspensão (composta por mola e
amortecedores) e o conjunto roda/pneu, na avaliação de conforto e dirigibilidade,
tornam-se os elementos automotivos mais importantes. Assim, grande esforço foi
dedicado nos últimos anos à investigação da dinâmica tanto da suspensão quanto
do conjunto roda/pneu.

8
Em geral, observa-se que os parâmetros da suspensão, tais como rigidez da
mola e coeficiente de amortecimento do amortecedor são mantidos fixos durante os
ensaios (NAUDÉ; SYNMAN, 2003; PATRÍCIO, 2005). Isso representa uma limitação,
visto que as excitações provenientes da pista, às quais um automóvel está sujeito
durante o tráfego, variam dinamicamente e as constantes de mola e amortecedor
não variam. Por essa razão, estudos recentes tem se concentrado na simulação
numérica e experimental do comportamento de suspensões com vistas em se obter
parâmetros ideais de rigidez e amortecimento da suspensão bem como no
correspondente controle do sistema de amortecimento (GOODALL; KORTÜM, 2002;
EYRES; CHAMPNEYS; LIEVEN, 2005; SPELTA et al., 2010; JIAO et al., 2010;
POUSSOT-VASSAL et al., 2008).
Diferentes pisos excitam de maneira distinta o veículo, alterando sua resposta
dinâmica, diante disto, o grande desafio é possibilitar que os parâmetros de rigidez e
amortecimento se adaptem às diferentes condições de excitação, ou ao menos um
destes parâmetros. Diversas tentativas de atuar na suspensão durante o tráfego têm
sido investigadas nos últimos anos no domínio da frequência (GAO; SUN, 2009;
SUN; GAO, 2011). Por exemplo, (HUANG, 2010; KIM, 2002; ELMADAN et al., 2011)
realizaram simulações numéricas baseados em modelos com previsão das
condições de pista para atuar nos parâmetros da suspensão dinamicamente através
de atuadores. Esses trabalhos, focados em simulação numérica de controladores
para suspensão ativa, contudo, supõem a disponibilidade de atuadores ou condições
de predição da pista, o que muitas vezes apresenta dificuldades práticas de
implementação, como por exemplo, tempo de resposta de atuadores e
complexidade de sistemas hidráulicos ou pneumáticos auxiliares necessários aos
atuadores (SUN et al., 2012).
Tendo em vista o foco de trabalhos recentes na simulação de sistemas de
suspensão ativa que geram dificuldades para a implementação prática, o presente
trabalho apresenta um sistema semi-ativo para controle de suspensão por meio da
variação do coeficiente de amortecimento com controle baseado na amplitude do
movimento vertical do veículo. Adotou-se um controle de baixa complexidade
computacional e de atuação rápida cuja viabilidade de implementação foi testada
experimentalmente por meio da construção de um protótipo do amortecedor e do
controlador.

9
1.1 Objetivo Geral
O trabalho consiste em desenvolver um software capaz de simular um modelo
virtual contendo os principais componentes de uma suspensão automotiva, avaliar
os parâmetros de entrada provenientes da pista, identificar sua interferência no nível
de conforto do veículo a partir de um parâmetro de estabilidade e liberar parâmetros
de controle. Por fim o sistema como um todo será utilizado na validação de uma
metodologia para otimizar conforto e dirigibilidade do veículo de acordo com as
condições de pista impostas a ele, cuja operação esteja diretamente ligada a um
sistema de controle que lê, interpreta e age na alteração dos parâmetros dinâmicos
da suspensão, caracterizando-se como ativa, semi-ativa ou adaptativa.
1.2 Objetivos Específicos
a) desenvolvimento de um sistema composto de hardware e software simulador
para monitoração, atuação e análise de suspensão;
b) desenvolvimento de um software simulador, capaz de permitir o estudo das
principais vibrações que atingem um veículo e disponibilizá-las para um
sistema de controle;
c) desenvolvimento de um protótipo para controle de amortecedores através de
níveis vibracionais;
d) desenvolvimento e validação de um amortecedor com coeficiente de
amortecimento variado;
e) desenvolvimento de um algoritmo de controle para o coeficiente de
amortecimento;
f) estudo das respostas de vibração no chassi, obtidas, com e sem o algoritmo
de controle da suspensão, para verificar a eficiência do controle dinâmico do
amortecimento na otimização do conforto minimizando ao máximo a perda de
dirigibilidade;
g) estudo da viabilidade de aplicação das respostas obtidas no simulador
proposto aos veículos automotores.

10
2 REVISÃO BIBLIOGRÁFICA
Neste capítulo são apresentados os tópicos da teoria considerada importante
para o entendimento do presente trabalho.
2.1 Dinâmica Veicular
O surgimento dos automóveis ocorreu em torno de 1769 quando o engenheiro
militar francês Nicholas Joseph Cugnot construiu um veículo de três rodas movido a
vapor. No entanto, os primeiros automóveis práticos movidos a gasolina surgiram
apenas em 1886, com os trabalhos independentes de Karl Benz e Gottlieb Daimler.
A partir de 1908, a indústria automobilística já estava bem estabelecida nos Estados
Unidos, com a produção em série do Modelo T de Henry Ford e a fundação da
General Motors Corporation. Durante um século de desenvolvimento da indústria
automobilística, grandes avanços tecnológicos foram alcançados. Estudos cada vez
mais aprofundados tornaram-se necessários para as áreas de projeto e
desenvolvimento de automóveis. Um tópico muito importante destes estudos é o que
envolve o comportamento dinâmico de veículos.
A dinâmica de veículos trata da relação entre movimentos e forças atuantes
sob as diversas condições às quais um veículo é submetido. O comportamento
dinâmico de um veículo é determinado pelas forças impostas a ele pelos pneus,
gravidade e aerodinâmica. O veículo e seus componentes são estudados para que
as forças geradas em uma dada manobra sejam obtidas. A resposta do veículo a
estas forças é então calculada.
Um veículo motorizado é composto por um grande número de componentes.
No entanto, para muitas das análises mais elementares, pode-se considerar que
todos os componentes se movem em conjunto. Para as manobras de aceleração,
frenagem e a maioria das análises de mudança de direção, é suficiente representar
o veículo como uma massa concentrada localizada no seu centro de gravidade
(CG), com propriedades adequadas de massa e inércia. Mas para a análise de ride,
é freqüentemente necessário tratar as rodas em separado. Neste caso, a massa
concentrada que representa o corpo do veículo é chamada de “massa suspensa” e o
conjunto das rodas é chamado de “massa não-suspensa”.

11
Para análises mais realistas, é necessário modelar cada componente veicular,
ou pelo menos os componentes de um dado sistema (suspensão, direção,
transmissão, freios, entre outros.). Antes dos adventos dos computadores digitais,
não havia meios para realizar análises desta natureza. No entanto, com o
desenvolvimento destes computadores e algoritmos de solução, modelos cada vez
mais complexos podem ser formulados e resolvidos. Nas diversas manobras
realizadas por um veículo, um dos componentes de maior importância é suspensão.
2.2 Suspensões Veiculares
A suspensão de um automóvel tem por objetivo diminuir as trepidações
experimentadas pelo veículo que resultam do contato das rodas com o solo. A
suspensão compreende todos os elementos que participam da estabilidade, firmeza
e conforto do automóvel. As funções principais da suspensão são (GENTA, 1997;
GILLESPIE, 1992):
a) oferecer flexibilidade vertical, permitindo que as rodas acompanhem as
irregularidades da pista e isolando o chassi ou monobloco destas
irregularidades;
b) manter as rodas nas condições adequadas de esterçamento e
cambagem;
c) reagir às forças e momentos gerados pelos pneus;
d) resistir ao movimento de roll da carroceria;
e) manter o contato dos pneus com o solo com mínimas variações de
carregamento.
Em geral, nos automóveis, a qualidade da suspensão será melhor quanto
menor for a razão entre o peso não suspenso e o peso suspenso. O peso não
suspenso abrange todos os elementos localizados entre as molas e a superfície do
solo, onde esses elementos estão sujeitos a trepidações de rodagem e a sua massa
deve ser a menor possível.
As suspensões geralmente podem ser divididas em duas categorias:
suspensões de eixo rígido (solid axles) e suspensões independentes. As
suspensões de eixo rígido possuem uma viga rígida, na qual as rodas são
montadas. Desta forma, o movimento de uma roda é transmitido à roda oposta,
fazendo com que elas recebam o mesmo esterçamento e camber. A vantagem deste

12
tipo de suspensão é que o ângulo de cambagem das rodas não é afetado pelo
movimento de roll da carroceria, além de apresentar pequenas variações nas
curvas. Além disto, o alinhamento das rodas é garantido pelo próprio eixo, reduzindo
o desgaste dos pneus. Sua maior desvantagem se deve aos níveis de vibrações
provocadas pelo esterçamento. Alguns tipos de suspensões de eixo rígido são:
Hotchkiss, Quatro barras (Four links) e De Dion.
As suspensões independentes permitem que cada roda se movimente
verticalmente sem afetar a roda oposta. Praticamente todos os veículos de
passageiros e caminhões leves utilizam suspensões dianteiras independentes. Isto
se deve ao espaço interno oferecido para a montagem do motor e aos menores
níveis de vibrações devidas ao esterçamento. Outras vantagens são: facilidade de
se controlar o centro de roll por meio de uma escolha adequada da geometria,
habilidade de se controlar a área de contato pneu-solo durante os movimentos
verticais, maiores deflexões da suspensão e maior rigidez ao movimento de roll.
Alguns tipos de suspensões independentes são: Braços oscilantes, SLA,
MacPherson, Multi-Link, Semi-Trailing arm, Swing axle.
Apesar da grande variedade de geometrias, as suspensões são compostas
basicamente de três componentes: mola, amortecedor e componentes de apoio. As
molas são os elementos que absorvem os movimentos provenientes da pista. Seu
comportamento é bem conhecido. Os amortecedores têm a função de reduzir as
amplitudes da suspensão e atenuar as oscilações provocadas pelas molas. São
componentes não-lineares e de difícil modelagem. O conjunto mola-amortecedor é
também conhecido como absorvedor de choque ou isolador de vibrações. Os
componentes de apoio são os elementos que ligam as rodas à carroceria ou chassis
do veículo. Desde a década de 1980, grande parte dos estudos na área de
suspensões automotivas é voltada para o cálculo da geometria destes componentes,
pois eles determinam a forma na qual as rodas se movimentam em relação ao
restante do veículo (HROVAT, 1997).
Os principais componentes de uma suspensão automotiva típica podem ser
vistas na Figura 1 (REIMPELL, 1996).

13
Figura 1 - Corte do conjunto mola e amortecedor. 1) Haste do
amortecedor, 2) Apoio superior da mola helicoidal, 3) Mola auxiliar, 4) Batente
superior , 5) Carroceria, 6) Mola helicoidal, 7) Amortecedor
Fonte: REINPELL, 1996.
2.2.1 Mola
Os principais tipos de molas utilizados nos atuais sistemas de suspensão
automobilísticos são: molas em lâminas (feixe de molas), molas helicoidais e molas
de torção (barras de torção).
As molas lâminas são o tipo mais antigo dos usados em sistemas de
suspensão de automóveis. Consistem de um conjunto de lâminas de aço,
normalmente de seções retangulares, que trabalham submetidas a esforços de
flexão. As molas do tipo feixe de lâminas (semi-elípticas) são pouco usadas em
14
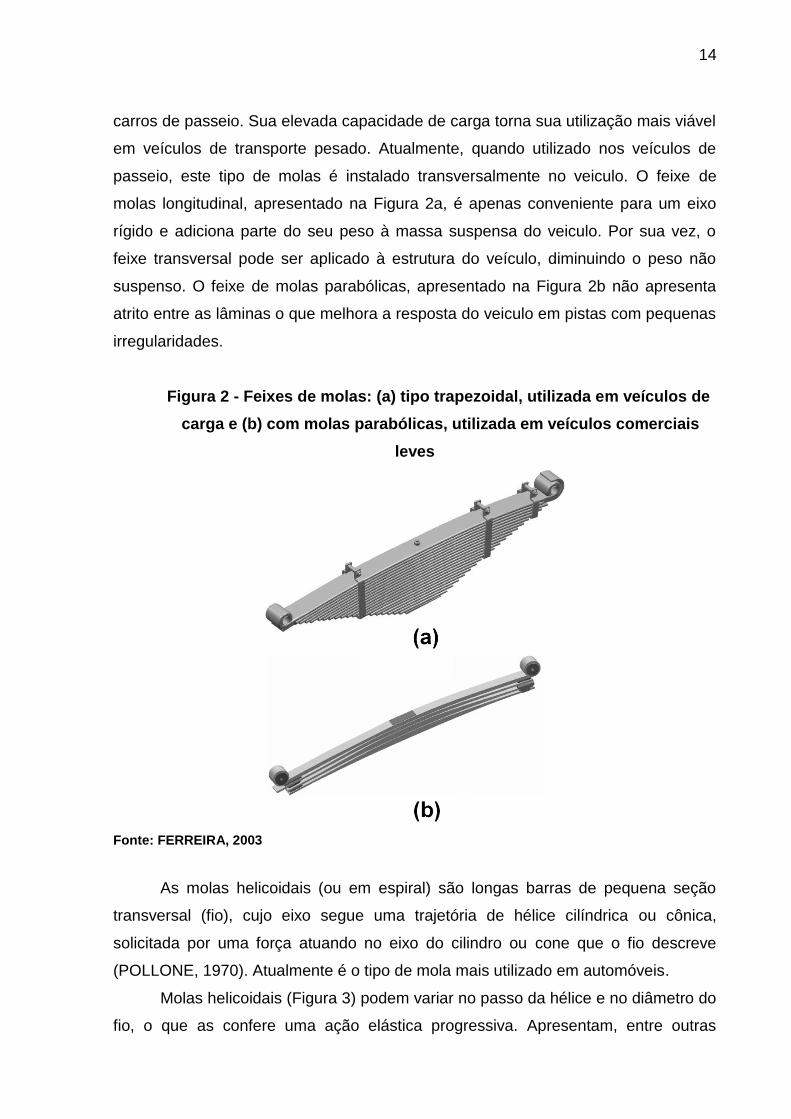
carros de passeio. Sua elevada capacidade de carga torna sua utilização mais viável
em veículos de transporte pesado. Atualmente, quando utilizado nos veículos de
passeio, este tipo de molas é instalado transversalmente no veiculo. O feixe de
molas longitudinal, apresentado na Figura 2a, é apenas conveniente para um eixo
rígido e adiciona parte do seu peso à massa suspensa do veiculo. Por sua vez, o
feixe transversal pode ser aplicado à estrutura do veículo, diminuindo o peso não
suspenso. O feixe de molas parabólicas, apresentado na Figura 2b não apresenta
atrito entre as lâminas o que melhora a resposta do veiculo em pistas com pequenas
irregularidades.
Figura 2 - Feixes de molas: (a) tipo trapezoidal, utilizada em veículos de
carga e (b) com molas parabólicas, utilizada em veículos comerciais
leves
Fonte: FERREIRA, 2003
As molas helicoidais (ou em espiral) são longas barras de pequena seção
transversal (fio), cujo eixo segue uma trajetória de hélice cilíndrica ou cônica,
solicitada por uma força atuando no eixo do cilindro ou cone que o fio descreve
(POLLONE, 1970). Atualmente é o tipo de mola mais utilizado em automóveis.
Molas helicoidais (Figura 3) podem variar no passo da hélice e no diâmetro do
fio, o que as confere uma ação elástica progressiva. Apresentam, entre outras

15
vantagens: peso reduzido, reduzida necessidade de espaço e facilidade de
manutenção. Existem molas em espiral com diversas configurações que objetivam
diminuir sua altura, atrito entre as espiras e efeito progressivo. As molas do tipo
espiral têm também rigidez elástica ou de mola não constante, podendo variar com o
peso do veículo e com o deslocamento da suspensão. Molas helicoidais são
normalmente utilizadas em veículos leves.
Figura 3 - Molas helicoidais, utilizadas em automóveis leves (veículos de
passeio)
Fonte: FERREIRA, 2003
A configuração mais comum para molas helicoidais são as cilíndricas de
passo e diâmetro de fios constantes. Para essa configuração, a constante de rigidez
pode ser calculada utilizando a Equação 1 (MILLIKEN, 1995):
ND
GdKh 3
4
8 (1)
Onde: Kh é o coeficiente de rigidez da mola [N]
G é o módulo de cisalhamento do material [Pa]
d é o diâmetro do fio [m]
D é o diâmetro das espiras medido de centro a centro [m]
N é o número de espiras trabalhando.

16
É possível obter molas helicoidais de rigidez variável (não lineares)
fabricando-se molas em que o diâmetro do fio ou o diâmetro da espira variam.
Nesse último caso, por exemplo, a mola possui formato cúbico de modo que se
fecha progressivamente reduzindo o número de espiras efetivamente atuantes e, por
conseguinte, aumentando a rigidez total da mola (DIXON, 1996).
As molas baseadas em barras de torção são formadas por uma barra de aço
cilíndrica, na qual uma ponta é fixa ao chassi por meio de um suporte religável e a
segunda gira em rolamento e possui uma alavanca ligado ao arco da roda, conforme
apresentado na Figura 4. As oscilações verticais da roda geram esforços de torção
na barra e a constante de rigidez desse tipo de mola é calculada tomando-se a
razão entre a força aplicada na extremidade do braço e o deslocamento linear do
mesmo. Por trabalharem submetidas a esforços de torção, devem possuir excelente
acabamento superficial e de proteção contra corrosão, visando inibir o surgimento de
trincas. A Equação 2 apresenta a constante de rigidez para uma mola do tipo barra
de torção com seção reta circular:
2LR
GIK (2)
onde: Kθ é o coeficiente de rigidez da mola [N]
G é o módulo de cisalhamento do material [Pa]
I é o momento polar de inércia da barra de torção [m4]
L é o comprimento efetivo da barra de torção [m]
R é o comprimento do braço ligado à barra de torção [m]

17
Figura 4 - Mola do tipo barra de torção
Fonte: FERREIRA, 2003
Os parâmetros de projeto importantes são a seção da barra de torção e o seu
comprimento. As principais vantagens das molas em barra de torção consistem na
economia de espaço e facilidade de alojamento no chassi em comparação às molas
em feixe, além da possibilidade de regulagem, por roda, de acordo com a altura do
veículo no solo. Por essas razões, apresentam baixa necessidade manutenção e
são, atualmente, os tipos de molas mais usados em veículos automotores de
pequeno porte (ALMEIDA, 2002).
2.2.2 Amortecedores
Os amortecedores, também conhecidos como absorvedores de choque,
possuem como função dissipar a energia devido ao movimento vertical do corpo do
veículo ou da roda, o qual se origina de um movimento controlado ou de rugosidade
da pista (DIXON, 1996). As irregularidades do solo comprimem ou distendem as
molas do sistema de suspensão, que acumulam energia em conseqüência da
deformação experimentada. Como reação, a carga associada ao peso do automóvel
produz movimentos de extensão e compressão nas molas, que alteram a
estabilidade do veículo, fazendo-o oscilar para cima e para baixo. Tais impulsos
apresentam impacto negativo na estabilidade do veículo na medida em que variam o
contato do pneu com o solo, podendo provocar derrapagens e desvios na trajetória
do automóvel.

18
Atualmente, os amortecedores mais utilizados na indústria automotiva são os
hidráulicos, baseiam seu princípio de funcionamento nas forças de amortecimento
viscoso geradas pelo deslocamento de um fluido. A força de amortecimento viscoso
gerada por um amortecedor hidráulico é proporcional à velocidade de deslocamento
que, no caso dos veículos automotores, atua no sentido de produzir movimentos
oscilatórios verticais.
Os amortecedores hidráulicos se apresentam na forma de tubos telescópicos,
que podem ter configuração de tubo simples ou tubo duplo. Na Figura 5a e 5b são
apresentados os principais elementos dos amortecedores de tubo simples e duplo,
respectivamente.
Figura 5 - Amortecedores hidráulicos: (a) tubo simples e (b) tubo duplo
(a) (b)
Fonte: REIMPELL, 1996.

19
O amortecedor de tubo simples possui as câmeras de trabalho 1 e 2 (com
volumes V1 e V2), as quais estão preenchidas pelo fluido de amortecimento
(geralmente óleo) à pressão P1 e P2, respectivamente. Uma terceira câmera,
preenchida com gás N2 a alta pressão, tem a função de regular a atuação do
amortecedor durante a ação de compressão das molas do sistema de suspensão do
veículo. Entre as câmeras 1 e 2 há um pistão dotado de orifício que permite o fluxo
de óleo entre as duas câmeras, segundo uma vazão Q12. O efeito de amortecimento
é obtido fazendo com que o óleo passe através de orifícios calibrados, transformado
a energia cinética imposta ao óleo pelo movimento relativo das massas suspensas e
não suspensas em calor, que por sua vez é dissipado na atmosfera. Assim, a força
de amortecimento é dependente do deslocamento de óleo e pode ser calculada a
partir diferença de pressão entre as duas câmeras (ΔP):
2
2
12
deCA
QP (3)
Onde: Q12 é a vazão do óleo através do orifício [m3/s]
Ae é a área efetiva do pistão [m2]
Cd é o coeficiente de arraste do óleo
ρ é a densidade do óleo [kg/m3]
Os amortecedores telescópicos de tubo duplo, Figura 5b, se caracterizam por
uma câmara de trabalho (A), onde trabalham um êmbolo (1) e sua haste (4), por
uma câmara de equalização (C), por uma válvula inferior (2), uma guia para a haste
do êmbolo (5) e o seu selo (3). O reservatório (C) é parcialmente preenchido com o
óleo, o restante do volume do reservatório C é ocupado pelo gás, no caso de
amortecedores pressurizados.
No amortecedor telescópico de tubo duplo, quando a suspensão é
comprimida, as duas extremidades do amortecedor se aproximam, o pistão (1) se
move para baixo e parte do óleo da câmara flui através da válvula II para a parte (A).
A outra parte do óleo, que corresponde ao volume deslocado pelo êmbolo, passa
através da válvula IV e vai para a câmara de equalização (C). Durante a
20
compressão, a maior parcela do amortecimento proporcionado pelo amortecedor se
deve à passagem de óleo pela válvula IV.
Quando a suspensão é tracionada, as duas extremidades do amortecedor se
afastam, a pressão na parte superior da câmara aumenta e o fluxo de óleo ocorre
pela válvula I em direção a porção inferior da câmara. A passagem do óleo pela
válvula I é a principal responsável pela geração da força de amortecimento quando o
amortecedor se distende. À medida que as extremidades do amortecedor se
afastam, o volume da câmara principal aumenta e o óleo necessário para o
preenchimento da câmara é succionado da câmara de equalização através da
válvula III, que é simplesmente uma válvula de retorno.
Durante o processo de extensão do amortecedor, além da maioria do óleo
que passa pela válvula I, uma pequena parte passa entre a haste do amortecedor e
sua guia, fazendo com o óleo vá para a câmara de equalização passando pelo
orifício (6).
2.3 Sistemas de Suspensão Semi-Ativos
Os sistemas de suspensão convencionais atuam no sentido de promover
isolamento vibracional no veículo pelo uso de elementos passivos tais como molas e
amortecedores de coeficientes constantes. A principal desvantagem dos sistemas
de suspensão baseados puramente em componentes passivos reside no fato de que
seus parâmetros constitutivos devem ser sintonizados para operar em uma banda
de frequência estreita, limitando o seu desempenho. Por essa razão, desde a
década de 1980, considerável esforço tem sido empreendido no sentido de
desenvolver sistemas de suspensão ativos e semi-ativos, os quais possuem
parâmetros de operação moduláveis oferecendo boa dirigibilidade e conforto em
diversas condições de pista de rolamento (HROVAT, 1997; FISCHER; ISERMANN,
2004).
Suspensões ativas são as capazes de armazenar, dissipar e introduzir
energia no sistema de suspensão. Como resultado, as características do sistema de
suspensão (coeficiente de amortecimento e rigidez da mola), fixas em sistemas
passivos, podem ser modificadas de acordo com a necessidade de amortecimento
requerida pelo veículo em um dado momento (CANALE; MILANESE; NOVARA,
2006). As suspensões ativas utilizam componentes como bobinas hidráulicas e

21
compressores, os quais além de exigirem manutenção específica, possuem custo
elevado e impõem ao veículo uma taxa adicional de consumo de energia.
Por outro lado, suspensões semi-ativas são as que dissipam energia
unicamente por meio de amortecedores controláveis, sem a utilização de atuadores
que modificam diretamente o percurso da suspensão e sem aportar energia ao
sistema de suspensão. Por essa razão, sistemas de suspensão semi-ativos
possuem, além de menor custo de projeto devido à ausência de atuadores
específicos, menor custo em termos de energia para o veículo (CANALE;
MILANESE; NOVARA, 2006; SWEVERS et al., 2007). Os sistemas de suspensão
semi-ativos convencionais possuem como princípio de funcionamento a variação da
vazão do fluido de amortecimento através do pistão do amortecedor, o que pode ser
conseguido, por exemplo, pela variação da área do orifício de acesso entre as
câmeras (FISCHER; ISERMANN, 2004). Outras possibilidades de projeto para os
amortecedores ativos foram enumerados por Davis (DAVIS et al., 1994), conforme
pode ser observado na Figura 6.
As principais limitações em amortecedores semi-ativos ocorrem para baixas
frequências de vibração, manobras de frenagem, aceleração e esterçarmento
(YOUN; HAC, 1995). Apesar disso, embora um amortecedor semi-ativo possa
reproduzir a força de amortecimento gerada por um amortecedor ativo apenas
quando tal força é dissipativa, o desempenho de um amortecedor semi-ativo em,
termos de isolamento das vibrações, pode se aproximar do desempenho de um
amortecedor completamente controlável. Assim, novas concepções de
amortecedores semi-ativos vêm sendo propostas e testadas ao longo dos anos
(TEIXEIRA, 2007). Devido à dificuldade em se controlar o sistema de suspensão
através da variação da rigidez do sistema (SPELTA et al., 2010), a maior parte dos
esforços se concentrou nas tentativas de modular o amortecimento da suspensão
(HROVAT, 1997; GILIOMEE;ELS, 1998; KITCHING, 2000; TEIXEIRA; LÉPORE;
RIBEIRO, 2004; TEIXEIRA, 2007; SAVARESI, 2009; JIAO et al., 2010). Por
exemplo, Kitching (KITCHING, 2000) propôs um amortecedor semi-ativo para
caminhões pesados em que uma válvula solenóide do tipo proporcional era
responsável por variar o orifício do amortecedor (Fig. 7). A válvula solenóide (PV1)
controla a mudança de pressão na câmera superior do amortecedor.
Teixeira (TEIXEIRA, 2007) enumerou as características desejáveis de um
sistema de suspensão semi-ativo controlado através da variação das dimensões do

22
orifício do amortecedor: hermeticamente selado, baixo atrito de Coulomb, trabalhar
sob carga de compressão para prevenir qualquer tipo de folga, utilizar materiais
estáveis possibilitando uma vida longa, ter ampla faixa de capacidade de carga,
possuir coeficientes de amortecimento continuamente ajustáveis.
Figura 6 - Possibilidades de projeto para amortecedores ativos
Fonte: DAVIS, 1994.

23
Figura 7 - Circuito hidráulico do amortecedor semi-ativo proposto para
caminhões
Fonte: KITCHING, 2000.
2.4 Conforto e Dirigibilidade
A avaliação das características de conforto de um veículo propriedades é
eminentemente subjetiva e abarca diversos aspectos: nível de ruído sonoro,
vibração, temperatura, entre outros. Do ponto de vista da dinâmica veicular e da
análise de vibrações, a avaliação de conforto é estudada em geral para frequências
de até aproximadamente 25Hz (GILLESPIE, 1992). O limite de 25Hz é adotado por
ser próximo ao limite superior das frequências que caracterizam vibrações em
veículos nas condições de baixa e média rotações do motor. As vibrações a que um
veículo está sujeito possuem fontes diversas, dentre as quais se destacam as

24
irregularidades da pista ou fontes embarcadas. As fontes embarcadas se referem
aos componentes rotativos do veículo e incluem, portanto, o conjunto rodas e pneus,
sistema de transmissão e motor. Atualmente, o conforto é uma das características
que mais recebem atenção dos projetistas de veículos (LIU; CHEN; JIANG, 2010).
Apesar de sua natureza essencialmente subjetiva, desde a década de 1960 foram
desenvolvidas metodologias objetivas de avaliação de conforto veicular. Uma
apresentação breve de tais metodologias pode ser encontrada em (ELS, 2005;
VILELA, 2010).
A dirigibilidade, por sua vez, pode ser entendida como a capacidade de um
veículo realizar manobras em curva, o que, em termos práticos, depende tanto da
estabilidade do veículo como da habilidade do condutor. Segundo Harty (HARTY,
2005), a capacidade de um veículo realizar manobras em curva depende da fricção
disponível entre pneus e pista, a qual define a máxima aceleração lateral possível
para uma dada combinação veículo-condutor. Para pequenos graus de
esterçamento, há uma faixa de comportamento linear, em que incrementos no
esterçamento provocam aumentos proporcionais na mudança de direção do veículo.
Ao se aumentar o grau de esterçamento para além do limite de fricção, torna-se
fisicamente impossível manter o controle do veículo. Assim sendo, a busca por um
aumento na dirigibilidade passa por aumentar o limite de fricção e o limite de
linearidade das manobras (ELS, 2007).
Quando um automóvel se encontra em movimento, a vibração oriunda da
pista provoca impactos negativos no conforto, dirigibilidade e velocidade do veículo,
o que pode causar danos em partes e componentes do automóvel, de modo que
significativo esforço tem sido empreendido nos últimos anos com o intuito de projetar
sistemas de suspensão que ofereçam condições ideais de isolamento das vibrações
da pista (LIU; CHEN; JIANG, 2010). Contudo, segundo Harty (HARTY, 2003), os
conceitos de dirigibilidade e conforto são antagônicos. Isso é especialmente válido
para sistemas de suspensão passivas, onde os elementos da suspensão possuem
características físicas definidas, as quais devem ser ajustadas para permitir ora
melhor conforto ora superior dirigibilidade. Demonstrou-se, por exemplo,
(CHALANSI, 1991) que o nível de conforto experimentado pelos passageiros de um
automóvel podia ser aperfeiçoado mediante o aumento do coeficiente de
amortecimento do sistema de suspensão do veículo. Contudo, ocorre aumento da
deflexão das rodas com perda do contato entre pneus e pista, reduzindo o limite de

25
fricção disponível para realizar manobras de esterçamento e, consequentemente, a
dirigibilidade do veículo. Observações semelhantes foram feitas por Holdmann
(HOLDMANN, 1999), que notou que, com suspensões passivas a questão de
melhoria de conforto e dirigibilidade sempre se reduz a um compromisso entre as
duas grandezas. Assim, na busca de uma melhor relação entre conforto e
dirigibilidade, projetistas foram levados a utilizar sistemas de suspensão ativos ou
semi-ativos em detrimento dos sistemas de suspensão passivos convencionais
(BOUAZARA; RICHARD; RAKHEJA, 2006; LIU; CHEN; JIANG, 2010).
2.5. Elementos de Teoria de Controle
A automação pode ser definida como a tecnologia por meio da qual um
processo ou procedimento é alcançado sem assistência humana. É realizada
utilizando-se um programa de instruções combinado a um sistema de controle
(GROOVER, 2010). O primeiro passo para se controlar um sistema reside na sua
modelagem matemática que permite um estudo analítico coerente com o
comportamento do sistema na pratica. Os resultados obtidos devem permitir o
conhecimento físico do sistema. O modelamento é importante, pois define o grau de
precisão com o qual o sistema de controle obtém resposta do processo controlado.
A Figura 8 representa esquematicamente um sistema de controle em malha aberta e
a Figura 9 em malha fechada.
Figura 8 – Sistema de controle de malha aberta
Fonte: GROOVER, 2010.

26
Figura 9 – Sistema de controle de malha fechada
Fonte: GROOVER, 2010.
Uma das técnicas utilizadas para o levantamento do modelo de um
determinado sistema de controle é denominada “Identificação de sistemas”. Neste
caso os modelos são do tipo “caixa preta” uma vez que apenas as relações entre
entradas e saídas do processo são importantes. A vantagem de se utilizar esse
método em sistemas complexos reside no fato de se obter de modo rápido e prático
o modelo dinâmico do sistema. A identificação do processo inclui os seguintes
passos:
a) planejamento e execução experimental;
b) seleção da estrutura do modelo (linear ou não);
c) estimação dos parâmetros do modelo;
d) validação do modelo.
O sistema a ser controlado é chamado de planta. O sinal aplicado às entradas
de controle é chamado de sinal de controle ou variável manipulada. O sinal de saída
do processo é chamado de variável controlada ou variável de processo
(BAZANELLA, 2005). Em função da forma de obtenção do sinal de controle, é
possível classificar estratégias de controle em malha aberta ou em malha fechada.
Sistemas de controle em malha aberta se caracterizam pelo baixo custo e
simplicidade. Entretanto, possuem a desvantagem de não compensarem as
possíveis variações internas, e nem as perturbações externas inerente aos
processos controlados. No sistema em malha aberta, as informações relativas à
evolução do processo não são utilizadas para definir o sinal de controle. A
27
característica principal deste tipo de controle reside no fato de que o sinal de
controle é configurado previamente.
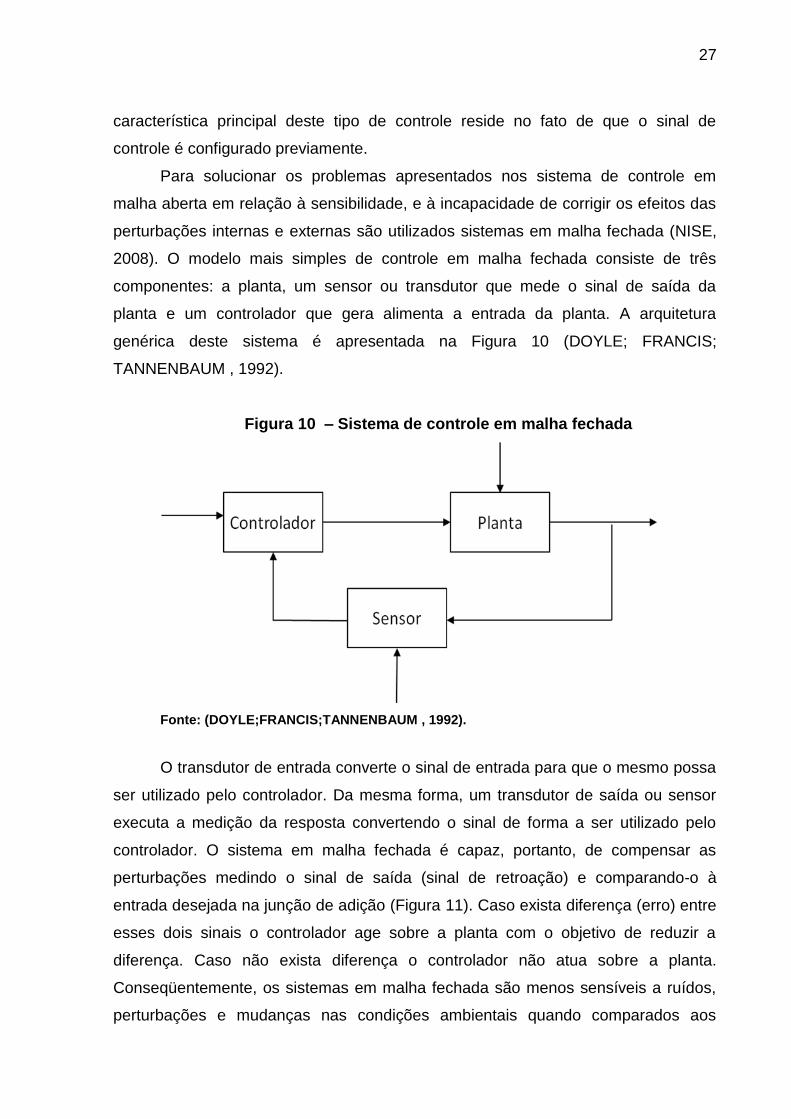
Para solucionar os problemas apresentados nos sistema de controle em
malha aberta em relação à sensibilidade, e à incapacidade de corrigir os efeitos das
perturbações internas e externas são utilizados sistemas em malha fechada (NISE,
2008). O modelo mais simples de controle em malha fechada consiste de três
componentes: a planta, um sensor ou transdutor que mede o sinal de saída da
planta e um controlador que gera alimenta a entrada da planta. A arquitetura
genérica deste sistema é apresentada na Figura 10 (DOYLE; FRANCIS;
TANNENBAUM , 1992).
Figura 10 – Sistema de controle em malha fechada
Fonte: (DOYLE;FRANCIS;TANNENBAUM , 1992).
O transdutor de entrada converte o sinal de entrada para que o mesmo possa
ser utilizado pelo controlador. Da mesma forma, um transdutor de saída ou sensor
executa a medição da resposta convertendo o sinal de forma a ser utilizado pelo
controlador. O sistema em malha fechada é capaz, portanto, de compensar as
perturbações medindo o sinal de saída (sinal de retroação) e comparando-o à
entrada desejada na junção de adição (Figura 11). Caso exista diferença (erro) entre
esses dois sinais o controlador age sobre a planta com o objetivo de reduzir a
diferença. Caso não exista diferença o controlador não atua sobre a planta.
Conseqüentemente, os sistemas em malha fechada são menos sensíveis a ruídos,
perturbações e mudanças nas condições ambientais quando comparados aos

28
sistemas de malha aberta (NISE, 2008). A seguir estão listadas as vantagens que
são obtidas pelo uso de sistemas em malha fechada:
a) aumento da precisão do sistema de controle em relação ao controle em
malha aberta;
b) redução ou eliminação do efeito das perturbações sobre a variável do
processo;
c) diminuição da sensibilidade do comportamento do sistema de controle
à variações dos parâmetros do processo, ou seja, torna o controle mais
robusto.
Figura 11 – Sistema Realimentado
Fonte: PAZOS, 2002.
A Figura 11 apresenta o diagrama típico de controle realimentado de um
processo. Na Figura 12 G(s), H(s) e C(s) correspondem às funções de transferência,
respectivamente, do processo, do sensor e do controlador. Deve-se ressaltar que a
função do atuador esta contida em G(s). Em algumas situações, se a resposta
dinâmica do sensor é muito elevada considera-se H(s)=1. Neste caso diz-se que o
sistema possui realimentação unitária. Na Figura 12 r(s), E(s) e u(s) são,
respectivamente, as transformadas de Laplace do sinal de referência, erro e
controle, q1(s) e Q2(s) correspondem a perturbações agindo respectivamente na
entrada e saída do processo.

29
Figura 12 – Diagrama de um sistema realimentado
Fonte: BAZANELLA, 2005.
2.5.1. Parâmetros a serem analisados em Sistemas de Controle
Os parâmetros abaixo descritos devem ser analisados com o objetivo de
propiciar uma atuação eficiente e segura do sistema de controle.
O primeiro parâmetro a ser considerado é sua resposta que consiste de duas
etapas: a resposta transitória e a resposta permanente. A resposta transitória é
entendida como aquela que vai do estado inicial do sistema ao estado final (OGATA,
1982) e é um dos fatores importantes na analise de um sistema de controle, Figura
13. O tempo de resposta transitória pode ser responsável pela quebra ou pelo não
funcionamento do controle. Para evitar danos ao sistema é imprescindível o
conhecimento de todos os tempos envolvidos na malha de controle.
Após a eliminação da componente transitória da resposta de um sistema,
resta a presença da resposta de estado permanente (ou estacionário). A
característica principal da resposta de estado permanente consiste no fato de que
não se altera o estado do sistema em níveis significativos com relação ao tempo.
Com isso é possível analisar de forma quantitativa o erro de estado estacionário de
modo a projetar no controlador ações corretivas para a redução deste erro.
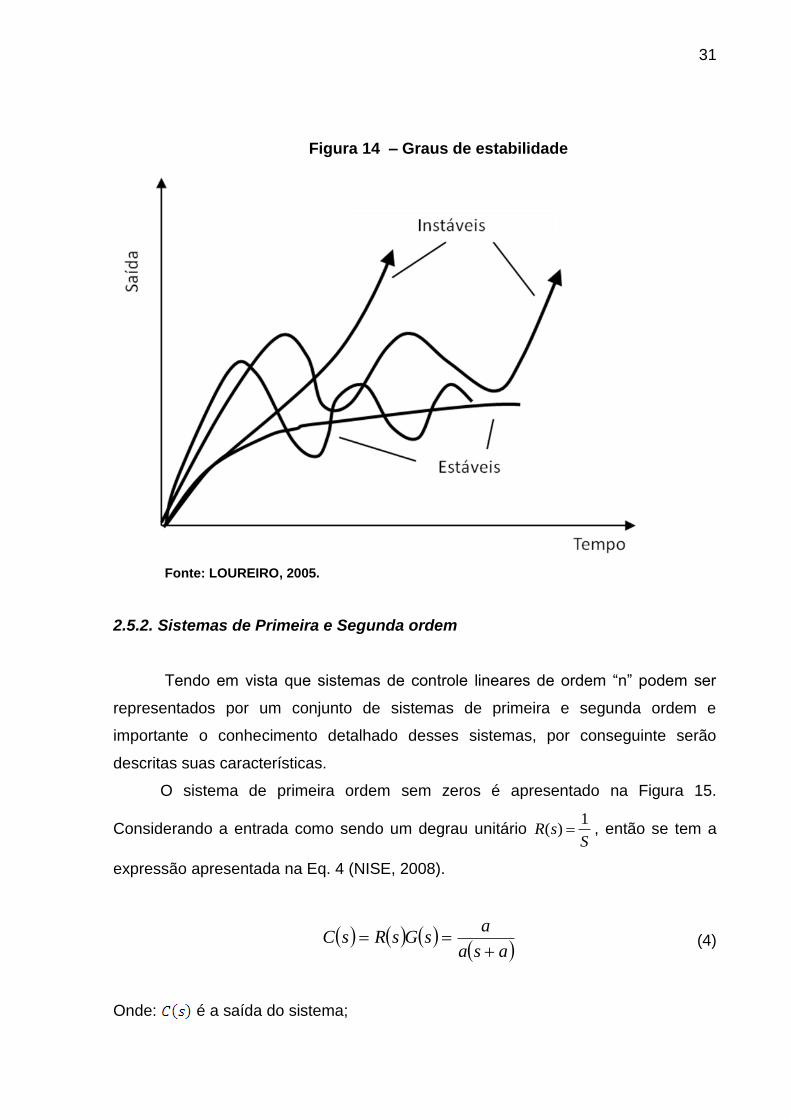
Outro parâmetro importante é a estabilidade. Sistemas de diferentes graus de
estabilidade são ilustrados esquematicamente na Figura 14. Como se pode
perceber, os processos instáveis se caracterizam pelo fato que a saída se torna
cada vez maior em relação ao tempo, sendo que o contrário ocorre em sistemas de
elevado grau de estabilidade. Em um sistema real, sempre há limite para as
oscilações, devido à existência de limitações físicas. Sistemas lineares, se

30
oscilarem, sempre estão no limite de estabilidade, mesmo não havendo perturbação
na entrada e mesmo que a amplitude da oscilação não caia. Sem a presença do
controlador sistemas em malha aberta na sua grande maioria são estáveis. Sistemas
reais na presença do controlador e em malha fechada podem se tornar instáveis
(LOUREIRO, 2005). Considerando um sistema linear a resposta total é a soma da
resposta natural e da resposta forçada. A resposta natural descreve o modo pelo
qual o sistema dissipa ou acumula energia. A forma ou a natureza desta resposta é
dependente somente do sistema. A resposta forçada é dependente da entrada. Para
que um sistema de controle possa ser utilizado a resposta natural deve tender a
zero, restando somente a resposta forçada. A condição de instabilidade ocorre
quando a resposta natural é muito maior que a resposta forçada.
Figura 13 – Regime transitório
Fonte: BAZANELLA, 2005.
31
Figura 14 – Graus de estabilidade
Fonte: LOUREIRO, 2005.
2.5.2. Sistemas de Primeira e Segunda ordem
Tendo em vista que sistemas de controle lineares de ordem “n” podem ser
representados por um conjunto de sistemas de primeira e segunda ordem e
importante o conhecimento detalhado desses sistemas, por conseguinte serão
descritas suas características.
O sistema de primeira ordem sem zeros é apresentado na Figura 15.
Considerando a entrada como sendo um degrau unitário S
sR1
)( , então se tem a
expressão apresentada na Eq. 4 (NISE, 2008).
asa
asGsRsC
(4)
Onde: é a saída do sistema;

32
é função de entrada do sistema e
é a função de transferência do sistema.
Figura 15 – Sistema de primeira ordem e pólos
Fonte: NISE, 2008.
Aplicando-se a transformada inversa de Laplace tem-se a expressão
apresentada na equação 5.
at
nf etctctc 1 (5)
Onde: é a resposta forçada e
é a resposta natural
O pólo situado na origem gera 1)( tC f e o pólo do sistema em -a gerou a
resposta natural at
n etC )( .
A constante de tempo de um sistema de primeira ordem pode ser definida
como o tempo necessário para que a resposta se reduza a 37% do seu valor
inicial ou alcance 63% do seu valor final quando for aplicado ao sistema um degrau
de entrada, conforme ilustrado na Figura 16.
33
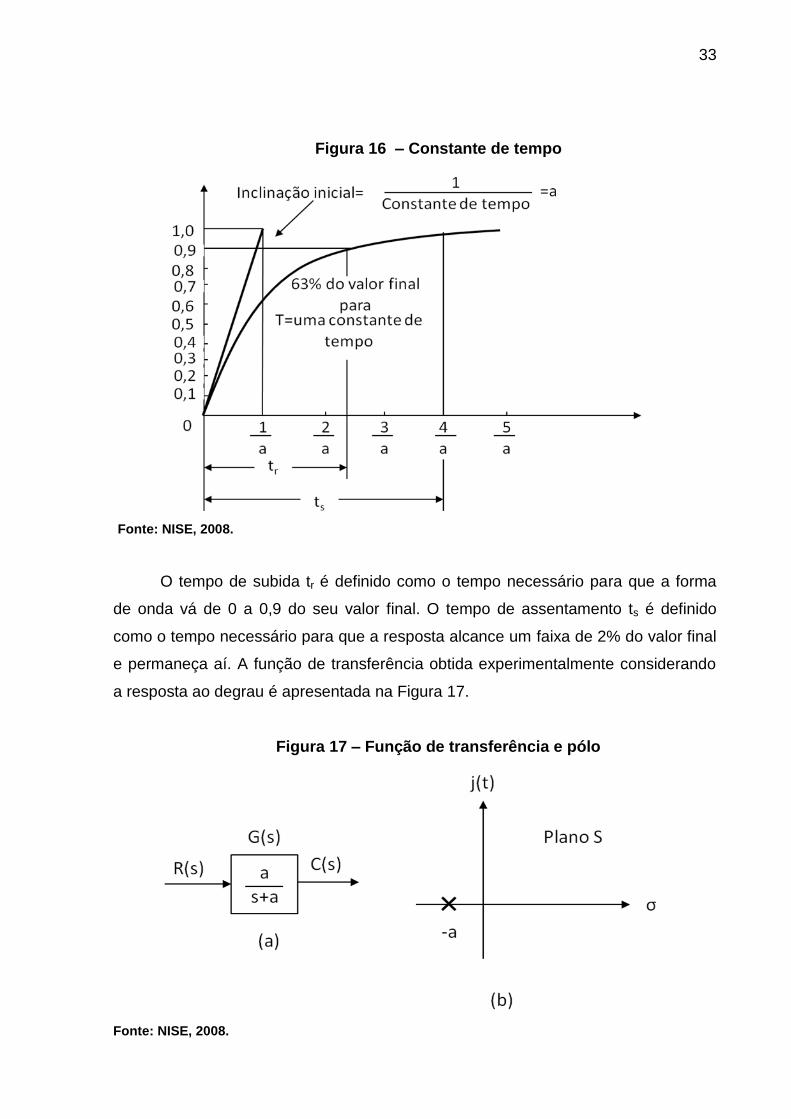
Figura 16 – Constante de tempo
Fonte: NISE, 2008.
O tempo de subida tr é definido como o tempo necessário para que a forma
de onda vá de 0 a 0,9 do seu valor final. O tempo de assentamento ts é definido
como o tempo necessário para que a resposta alcance um faixa de 2% do valor final
e permaneça aí. A função de transferência obtida experimentalmente considerando
a resposta ao degrau é apresentada na Figura 17.
Figura 17 – Função de transferência e pólo
Fonte: NISE, 2008.

34
Nos sistemas de primeira ordem a variação de um parâmetro altera somente
a velocidade da resposta. No caso dos sistemas de segunda ordem a mudança dos
parâmetros pode alterar a forma da resposta. A equação de transferência de malha
fechada sR
sC é dada pela equação 6.
22
2
2 nn
n
ssR
sC
(6)
Onde: é a Frequência natural do sistema;
é o Coeficiente de amortecimento do sistema;
A Figura 18 apresenta o diagrama de bloco geral de um sistema de segunda
ordem. Esses sistemas podem ser descritos em termos de dois parâmetros e ,
sendo o coeficiente de amortecimento do sistema e sua frequência natural. As
equações 7, 8 e 9 apresentam a relação desses parâmetros com os parâmetros do
sistema.
Figura 18 – Diagrama de bloco geral
Fonte: NISE, 2008.

35
Coeficiente de amortecimento:
JK
F
F
F
C 2 (7)
Onde: F é o amortecimento real;
Fc é o amortecimento critico;
J é o Momento de inércia e
K é a constante de proporcionalidade
Frequência natural:
K
Jn 2 (8)
Atenuação do sistema:
n (9)
Onde: é a atenuação do sistema.
Com base nas definições apresentadas, é possível analisar um sistema de
segunda ordem sob o ponto de vista do amortecimento do sistema:
Para 0 < < 1 o sistema é dito sub-amortecido.
Para = 1 o sistema é dito criticamente amortecido.
Para > 1 o sistema é dito super-amortecido.
A resposta de sistemas sub-amortecidos, criticamente amortecidos e super-
amortecidos, Figura 19 demonstra as três situações acima.

36
Figura 19 – Resposta ao degrau de segunda ordem
Fonte: NISE, 2008.
Um fator importante para a analise de sistemas de segunda ordem é sua
resposta transitória. Em determinadas situações práticas as características de
desempenho desejadas dos sistemas de controle são especificadas em termos de
grandezas no domínio do tempo. Sistemas que armazenam energia não podem
responder instantaneamente e têm resposta transitória sempre que sujeitos a
entradas e perturbações (OGATA, 1982). A Figura 20 apresenta a curva de resposta
a um degrau unitário de um sistema de segunda ordem.

37
Figura 20 – Curva de resposta ao degrau
Fonte: OGATA, 1982.
Na Figura 20 são apresentadas as grandezas no domínio do tempo sendo:
a) tempo de atraso Td, tempo necessário para a resposta alcançar pela
primeira vez o valor final;
b) tempo de subida Tf, tempo necessário para a resposta passar de 10%
a 90% do valor final;
c) tempo de pico Tp, tempo necessário para a resposta do primeiro pico
do sobre-sinal;
d) sobre-sinal máximo (percentual), é o máximo valor de pico da curva de
resposta medido a partir do valor unitário;
e) tempo de acomodação Ts, tempo necessário para a curva de resposta
alcançar e permanecer em torno do valor final, geralmente 2% ou 5%.

38
2.6 Controle de suspensão
A avaliação e modulação das características de um sistema de
amortecimento são questões fundamentais no início do projeto do controle de
qualquer suspensão ativa ou semi-ativa que empregue um amortecedor hidráulico
(WENLIN; XIANGJE; GAOXIN, 2010; SANKARANARAYANAN et al., 2008). Por
essa razão, grande esforço tem sido empreendido por pesquisadores no intuito de
projetar, simular e testar diferentes estratégias de controle para suspensões
automotivas (KARNOPP; COSBY, 1974; HROVAT, 1997; GILLIOMEE; ELS, 1998;
FISCHER; ISERMANN, 2004; ELS; THERON, 2007; SPELTA et al., 2010). Tais
estudos tem freqüentemente origem na modelagem matemática dos principais
elementos que compõem o sistema de suspensão automotivo, conforme
apresentado na Figura 21.
Em se tratando de sistemas de suspensão semi-ativas, três tipos principais de
estratégias de controle foram propostas nas últimas décadas (AHMADIAN; PARE,
2000): controle skyhook, controle groundhook e controle híbrido.
A estratégia de controle skyhook é descrita pelo seguinte conjunto de
equações (10):
00
0
121
121
sa
Ssa
F
VGF
VV
VV (10)
onde:
V1 é a velocidade absoluta da massa m1 com relação à pista;
V12 é a velocidade relativa entre as massas m1 e m2;
Fsa é a força de amortecimento
Gs é o fator de ganho, comumente usado em simulações para
representar o alcance completo do amortecedor

39
Figura 21 – Modelo simplificado do sistema de suspensão automotivo,
englobando um conjunto formado por roda e pneu, mola e amortecedor
Fonte: AHMADIAN;PARE, 2000.
Quando a velocidade relativa do amortecedor é positiva, a força de
amortecimento puxa para baixo o corpo do veículo. Quando a velocidade relativa do
amortecedor é negativa, a força de amortecimento empurra o corpo do automóvel
para cima. Assim, quando a velocidade absoluta do veículo é negativa e sua
trajetória está direcionada para baixo, se deseja que, com o máximo valor de
amortecimento, a força de amortecimento atue no sentido de empurrar o automóvel
para cima, ao passo que, para o valor mínimo de amortecimento, se deseja a força
de amortecimento puxe o automóvel para baixo. O contrário ocorre quando a
velocidade absoluta do veículo é positiva. O controle skyhook busca manter o
deslocamento ideal do corpo do veículo simulando um amortecedor passivo
“fisgado” (hooked) entre a massa do corpo e o “céu” (sky), conforme apresentado na
Figura 22, justificando o nome skyhook.

40
Figura 22 – Configuração idealizada para o controle skyhook
Fonte: AHMADIAN;PARE, 2000.
Com o controle groundhook, cuja representação idealizada é apresentada na
Figura 23, a força de amortecimento é determinada de acordo com as equações 11:
00
0 2
122
122
sa
gsa
F
VGF
VV
VV (11)
onde:
V2 é a velocidade absoluta da massa m2 (Figura 22)
Gg é o fator de ganho
As demais variáveis se aplica a descrição do modelo skyhook.
A lógica da estratégia groundhook de controle é similar à do modelo skyhook,
com a diferença que, aqui, se deseja controlar o movimento da massa m2. Quando a
velocidade do amortecedor é positiva, a força de amortecimento atua no sentido de
puxar o eixo do veículo. Quando a velocidade relativa é negativa, a força de
amortecimento empurra o veículo para baixo. Assim, se a velocidade absoluta do
eixo do veículo é negativa, de modo que ele se encontra em trajetória orientada para
baixo, se deseja que o máximo amortecimento atue no sentido de puxar o eixo para
cima, ao passo que, para o mínimo amortecimento, o desejável é que a força
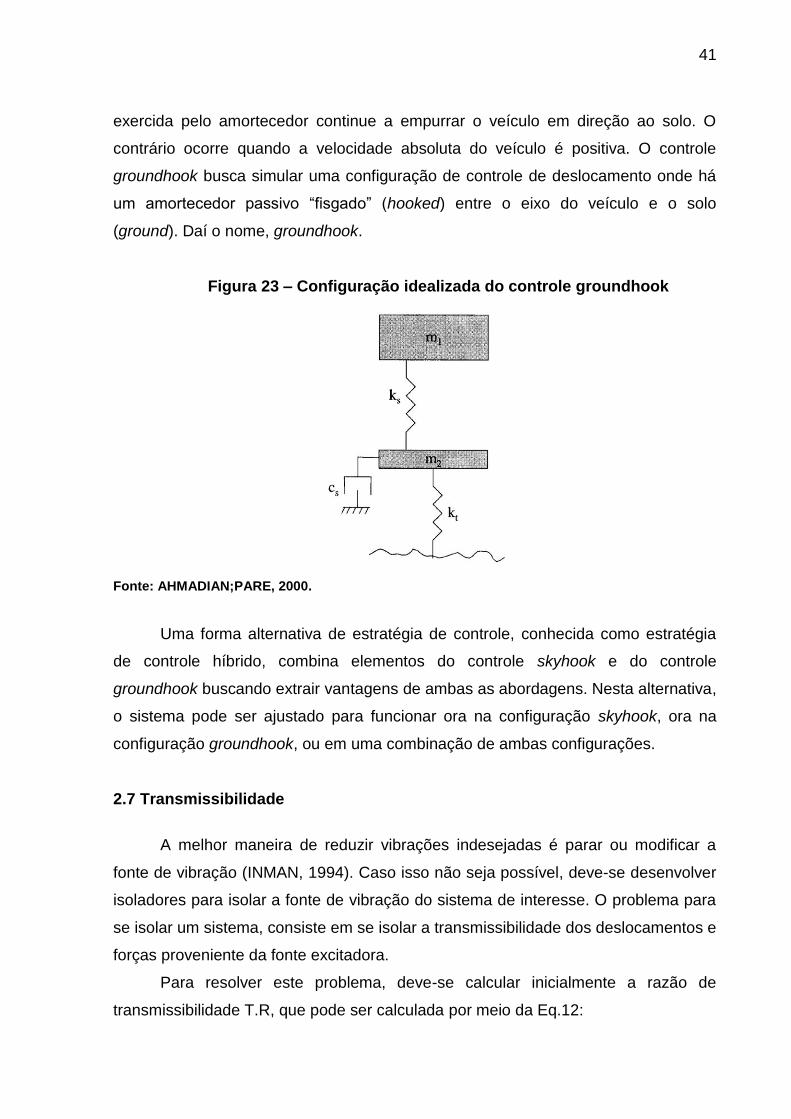
41
exercida pelo amortecedor continue a empurrar o veículo em direção ao solo. O
contrário ocorre quando a velocidade absoluta do veículo é positiva. O controle
groundhook busca simular uma configuração de controle de deslocamento onde há
um amortecedor passivo “fisgado” (hooked) entre o eixo do veículo e o solo
(ground). Daí o nome, groundhook.
Figura 23 – Configuração idealizada do controle groundhook
Fonte: AHMADIAN;PARE, 2000.
Uma forma alternativa de estratégia de controle, conhecida como estratégia
de controle híbrido, combina elementos do controle skyhook e do controle
groundhook buscando extrair vantagens de ambas as abordagens. Nesta alternativa,
o sistema pode ser ajustado para funcionar ora na configuração skyhook, ora na
configuração groundhook, ou em uma combinação de ambas configurações.
2.7 Transmissibilidade
A melhor maneira de reduzir vibrações indesejadas é parar ou modificar a
fonte de vibração (INMAN, 1994). Caso isso não seja possível, deve-se desenvolver
isoladores para isolar a fonte de vibração do sistema de interesse. O problema para
se isolar um sistema, consiste em se isolar a transmissibilidade dos deslocamentos e
forças proveniente da fonte excitadora.
Para resolver este problema, deve-se calcular inicialmente a razão de
transmissibilidade T.R, que pode ser calculada por meio da Eq.12:

42
o
T
F
FRT . (12)
onde, TF é a força transmitida e 0F a força da excitação.
A força transmitida da fonte excitadora para as molas e amortecedores, pode
ser encontrada pela Eq. 13.
)()()( txctkxtFT
(13)
Ao se solucionar a equação 13 para o caso onde a força excitadora é
harmônica, chegamos à Eq. 14.
222
2
0 )..2()1(
)..2(1..
rr
r
F
FRT T
(14)
O gráfico da Eq. 14 considerando que n
r
é dado pela Figura 24. Por
meio desta figura é possível observar que quando r = 1, ou seja, a fonte excitadora
( ) tem a mesma frequência da frequência natural ( n ) ocorrem amplificações dos
deslocamentos e forças da fonte excitadora em até 5 vezes.
Pode-se observar que para razões abaixo de 1,4 um maior amortecimento
provoca uma menor transmissibilidade de forças e deslocamentos. Acima deste
ponto o cenário se inverte e o que antes diminuía a transmissibilidade, passa a
aumentá-la.
Para os casos onde a razão entre as frequência é muito grande ou muito
pequena, a tendência é que não haja a transmissibilidade.
Diante de tudo que foi explicitado até agora, pode-se notar que dependendo
do que seja o interesse, ou seja, transmitir maiores forças e deslocamento, ou isolá-
los completamente, deve-se levar em conta o gráfico de transmissibilidade de modo
a operar com o T.R. nas faixas desejadas. Por exemplo, nos casos onde se deseja

43
transmitir maiores força e deslocamentos, deve-se escolher trabalhar nas faixas em
torno de r = 1. Por outro lado, se a intenção for isolar as forças e deslocamentos, o
ponto onde r é igual a 1 deve ser descartado de imediato.
Figura 24 – Gráfico de transmissibilidade (T.R) x n /
Fonte: ELABORADA PELO AUTOR

44
3 METODOLOGIA
Este tópico está organizado de acordo com a metodologia proposta para
execução do presente trabalho.
3.1. Fluxograma das atividades
Para atender ao que foi preconizado pelo objetivo geral e específico do
presente trabalho foram desenvolvidas diversas atividades de forma a permitir o
desenvolvimento do sistema de monitoramento, controle e simulação da suspensão,
conforme apresentado na Figura 25. Pode-se notar que o sistema é dividido em dois
sub-sistemas: o de Simulação Parametrização da Suspensão e o de Controle e
Atuação.
Figura 25 - Fluxograma das atividades
Fonte: ELABORADA PELO AUTOR

45
O requisito para o desenvolvimento do subsistema Simulação e
Parametrização da Suspensão é o modelamento matemático. O objetivo deste
tópico é levantar as entradas do modelo (parâmetros do modelo e pista) e gerar as
saídas que serão repassadas ao Sistema de Controle e Atuação (níveis
vibracionais).
O segundo subsistema que tem como objetivo controlar a suspensão
necessita, para realizar esta atividade, de um sistema micro controlado, além de um
driver de potência, que atua sobre os quatro amortecedores. A seguir são
apresentados o desenvolvimento de cada um dos subsistemas.
3.2. Construção do Amortecedor Variável
O protótipo do amortecedor, cujo objetivo foi possibilitar o controle do
coeficiente de amortecimento, foi montado com dois discos perfurados e montados
em um mesmo eixo e paralelos. Este desenvolvimento foi feito utilizando ferramenta
numérica de CAD, SolidWorks 2009, que possibilitou avaliar todo aspecto cinemático
e dinâmico do mecanismo de abertura do orifício. O modelo em CAD desenvolvido
pode ser visualizado na Figura 26 e o dimensional das peças geradas encontra-se
no Apêndice A.
Figura 26 - Modelo do amortecedor de coeficiente de amortecimento variável
Fonte: ELABORADA PELO AUTOR

46
O amortecedor de coeficiente variável foi pensado em quatro peças, sendo
duas fixas, carcaça e chaveta e duas móveis, pistão e anel perfurado. As peças
móveis tiveram como objetivo o controle do escoamento do fluído entre as duas
câmaras, dado pela alteração da concentricidade entre os furos do anel perfurado e
do pistão.
A defasagem entre anel perfurado e pistão, permite variar a concentricidade
entre os furos do pistão e os furos do anel perfurado, tornando a área de passagem
de óleo de uma câmara para a outra maior, quando a concentricidade for máxima ou
menor quando a concentricidade for mínima. Uma chaveta é utilizada para limitar o
curso de giro do pistão de modo que ele pode estar com seus furos totalmente
concêntricos aos do anel ou de modo que nenhum deles coincida com os furos do
anel.
Na Figura 27 é possível observar como ocorre a variação de área, regulada
por um motor externo. A interseção entre os furos do anel e do pistão, mostradas no
centro de cada uma das circunferências da figura indica a área de passagem do
fluido. A área dada pela interseção entre os furos do anel e do pistão são
conseguidos a partir do controle de giro do pistão. Este controle é dado por um
motor de passo, cujas especificações são apresentadas a seguir.
Corrente: 1A por fase
Tensão: 24V
Passo: 1.8 graus por pulso
Pulso por volta: 200
Torque: 0,1 N.m

47
Figura 27 – Variação da área de passagem com a variação da abertura
Fonte: ELABORADA PELO AUTOR
Para cada pulso do motor, que corresponde a um passo, o ângulo de abertura
é de 1,8°. Como a variação da área de interseção entre os furos do anel e do pistão
não seguem uma regressão linear, para que fosse possível efetuar o controle de
abertura, foi necessário tabelar a área de passagem em função da abertura e esta
em função do passo do motor.
A escolha do número de furos utilizados em cada anel, se deu através da
divisão do perímetro destes discos de forma a caberem dezesseis furos, para que ao
estarem totalmente excêntricos nenhum dos furos do anel superior coincidisse com
os furos dos anéis inferiores, resultando em oito furos para cada um dos anéis.
O amortecedor possui um fluido que ao escoar entre as câmaras irá provocar
o efeito de amortecimento, obtido a partir da diferença de pressão. A quantidade de
fluido presente é dada pelo volume da câmara menos o volume da haste que
movimenta o pistão. A especificação do fluido utilizado é: Óleo Shell Helix – HX3 API
SJ/CF 20W-50.
Para realizar a variação da concentricidade, propõem-se uma engrenagem
colocada por fora da carcaça e ligada a um motor de passo por meio de uma correia
dentada. Deste modo, conforme são dados os passos no motor, ele gira a carcaça

48
mudando a concentricidade entre pistão e anel perfurado. A montagem proposta
pode ser vista na Figura 28.
Figura 28 – Figura do amortecedor montado com motor de passo
Fonte: ELABORADA PELO AUTOR
Para fabricação do protótipo, foi utilizado o software Catalyst ligado à máquina
de prototipagem rápida Dimension SST768 da Pontifícia Universidade Católica de
Minas Gerais, no qual foi carregado o modelo em CAD e gerado o protótipo. O
material do protótipo é ABS.
3.3. Validação do amortecedor proposto
O experimento para validação do amortecedor proposto se baseia na Eq. 15.
KxxCxMF
, (15)

49
onde M é a massa, C o coeficiente de amortecimento e K a constante de rigidez da
mola.
O experimento foi realizado com o sistema em velocidade constante, logo a
aceleração é considerada zero e não tendo o sistema nenhuma mola, o termo
relativo à rigidez, também pôde ser considerado zero. Deste modo, resta somente:
xCF , (16)
onde é a velocidade e F a força.
A partir da Eq.16 se observam três incógnitas. Portanto, de modo a conhecer
o coeficiente de amortecimento C, mede-se a força através de uma célula de carga e
aplica-se ao amortecedor uma velocidade constante e conhecida que atua no
sentido de produzir, no cilindro, compressão, permitindo assim levantar uma curva
onde a inclinação é o coeficiente de amortecimento C.
A velocidade é aplicada por um sistema realimentado, composto de um motor
sem escova, conectado a um fuso por meio de um redutor. Este motor possui uma
saída que gera pulsos para cada giro realizado, permitindo conhecer sua rotação.
Um sistema micro controlado é responsável por medir, avaliar e controlar a rotação
do motor. O controle da velocidade de rotação é dado através de uma saída de
PWM (Pulse Wide Modulation) que permite variar a referência de tensão aplicada
sobre o driver do motor acelerando-o ou frenando-o de acordo com a referência
colocada no modelo de controle do sistema.
Para a conversão do movimento circular do motor, em linear do pistão, foi
utilizado um redutor, cujo o centro possui uma porca na qual foi rosqueado o fuso.
Em uma das extremidades deste fuso foi inserido um pino que não permite ao fuso
girar, obrigando assim que o mesmo tenha movimentos apenas lineares, sendo que
na outra extremidade foi engastada a haste do amortecedor.
Para medição da força aplicada, foi colocado, do lado oposto à aplicação da
força, um eixo que suporta a carcaça do amortecedor e que atua sobre uma célula
de carga, responsável pela medição da força aplicada. Um desenho esquemático do
experimento pode ser visto na Figura 29.

50
Figura 29 – Desenho esquemático para validação do protótipo do amortecedor
Fonte: ELABORADA PELO AUTOR
Os dados da balança utilizada são:
Modelo.............................: CS-15
Fabricante........................: Filizola
Máximo............................: 15Kg
Mínimo.............................: 0,125Kg
Resolução........................: 0,005Kg
Certificado de calibração: jan/2011
Para o sistema de imposição de velocidade foi utilizado um conjunto
motor/redutor/fuso com as seguintes especificações:
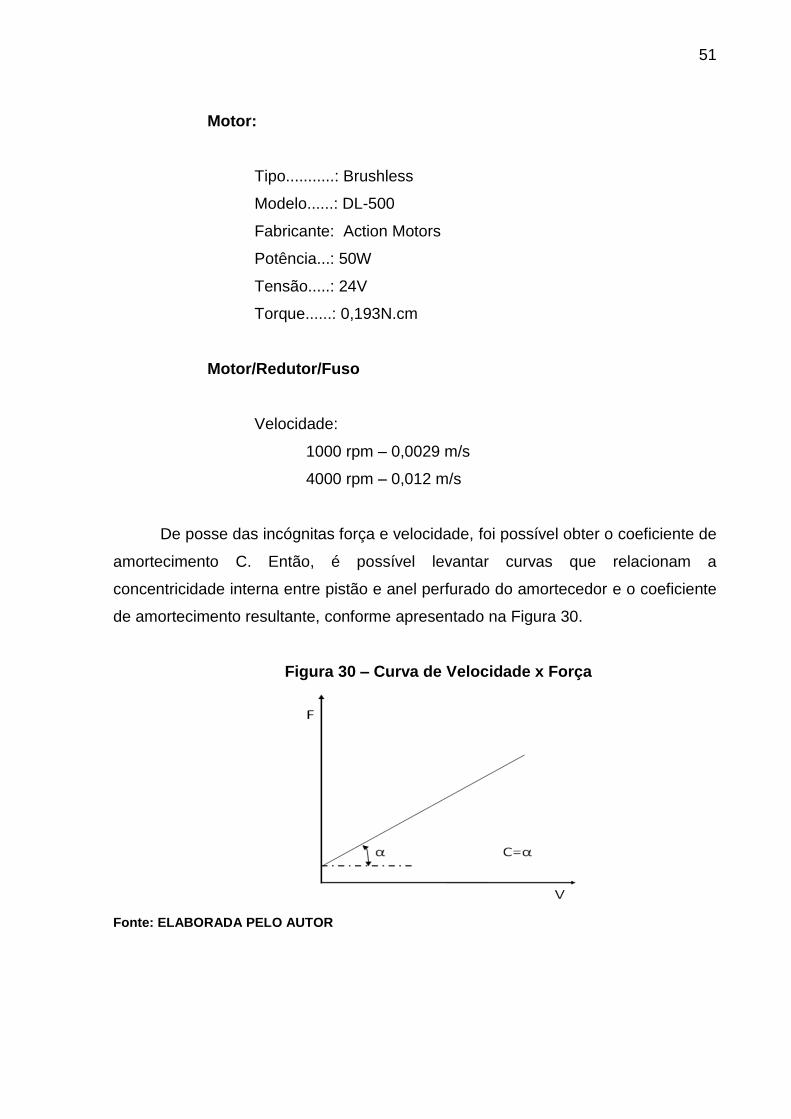
51
Motor:
Tipo...........: Brushless
Modelo......: DL-500
Fabricante: Action Motors
Potência...: 50W
Tensão.....: 24V
Torque......: 0,193N.cm
Motor/Redutor/Fuso
Velocidade:
1000 rpm – 0,0029 m/s
4000 rpm – 0,012 m/s
De posse das incógnitas força e velocidade, foi possível obter o coeficiente de
amortecimento C. Então, é possível levantar curvas que relacionam a
concentricidade interna entre pistão e anel perfurado do amortecedor e o coeficiente
de amortecimento resultante, conforme apresentado na Figura 30.
Figura 30 – Curva de Velocidade x Força
Fonte: ELABORADA PELO AUTOR

52
3.4 Desenvolvimento Matemático do Modelo a ser Simulado
O amortecedor desenvolvido pode ser utilizado em modelos massa-mola-
amortecedor com várias configurações diferentes. Com o intuito de avaliar o efeito
da modulação do coeficiente de amortecimento no controle da suspensão, propõe-
se um sistema cuja configuração assemelha-se à de um veículo automotor
convencional dotado de quatro amortecedores.
O modelo desenvolvido e utilizado nas simulações é apresentado na Figura
31 e seu desenvolvimento matemático explicitado a seguir. Vale ressaltar que os
componentes da roda traseira foram ocultados somente para visualização, mas
esses são considerados na modelagem.
Figura 31 – Modelo a ser simulado
Fonte: ELABORADA PELO AUTOR

53
A modelagem se inicia com o levantamento das equações de equilíbrio do
centro de massa (CG). Para tal baseou-se nos símbolos e incógnitas das Figuras 31
e 32 e foram calculadas as acelerações verticais de pitch e roll.
Figura 32 – Forças e momentos atuantes sobre o chassis do veículo
Fonte: ELABORADA PELO AUTOR
Equações para determinação da aceleração vertical:
Ss Fzm (17)
3210 SSSSs FFFFzm
(18)
s
SSSS
m
FFFFz
)( 3210
(19)
Equações para determinação da aceleração de roll:
xx II (20)

54
231120 )()( LFFLFFI SSSSx
(21)
x
SSSS
I
LFFLFF 231120 )()(
(22)
Equações para determinação da aceleração de pitch:
yy II (23)
310432 )()( LFFLFFI SSSSy
(24)
y
SSSS
I
LFFLFF 310432 )()(
(25)
onde:
)()(
risisirisisisi xxcxxkF (26)
Obtidas as equações de equilíbrio do CG, foram obtidas as equações de
equilíbrio de cada uma das 4 rodas, resultando em:
)()()( piririsirisisirisiriri xxkxxcxxkxm
(27)
Para obter as relações do deslocamento vertical, o ângulo de pitch e o ângulo
de roll em relação ao centro de massa, utilizou-se a Figura 33 e as relações
geométricas a seguir:

55
Figura 33 – Relacionamento de incógnitas e CG
Fonte: ELABORADA PELO AUTOR
Relações geométricas para a obtenção da relação do movimento vertical e o
CG:
43
3241
LL
LhLhz
(28)
21
20111
LL
LxLxh ss
(29)
21
12222
LL
LxLxh ss
(30)
substituindo 1h e 2h na equação de z, obtemos:
))(( 4321
331232141042
LLLL
xLLxLLxLLxLLz ssss
(31)

56
Relações geométricas para a obtenção da relação do ângulo de roll (Figura
34) e o CG:
Figura 34 – Determinação do ângulo de roll
Fonte: ELABORADA PELO AUTOR
21
43
LL
hh
(32)
43
32403
LL
LxLxh ss
(33)
43
33414
LL
LxLxh ss
(34)
substituindo 3h e 4h na equação de , obtemos:
))(( 4321
33142304
LLLL
xLxLxLxL ssss
(35)
Relações geométricas para a obtenção da relação do ângulo de pitch (Figura
35) e o CG:

57
Figura 35 – Determinação do ângulo de pitch
Fonte: ELABORADA PELO AUTOR
43
12
LL
hh
(36)
21
20111
LL
LxLxh ss
(37)
21
13222
LL
LxLxh ss
(38)
substituindo 3h e 4h na equação de , obtemos:
))(( 4321
31221102
LLLL
xLxLxLxL ssss
(39)
Nota-se que as equações de Z, e possuem quatros incógnitas 0Sx à
4Sx e somente três equações. Deste modo, se torna necessária mais uma equação
de vinculo para a determinação destas variáveis. Para isso foi utilizada a equação do
plano, uma vez que a rigidez do chassi ao ser comparada com a rigidez da
suspensão é infinita, considerando que 0Sx , 1Sx , 2Sx e 3Sx fazem parte do mesmo
plano.

58
Equação do plano:
03210 ssss xxxx (40)
Deste modo, de posse das quatro equações, obtém-se o seguinte sistema
linear que nos permite calcular Six :
0
11113
2
1
0
1212
3344
31324142
z
x
x
x
x
L
L
L
L
L
L
L
LL
L
L
L
L
L
L
LL
LL
L
LL
L
LL
L
LL
s
s
s
s
(41)
onde:
))(( 4321 LLLLL (42)
Para a implementação do modelo, necessitou-se transformar o sistema de
segunda ordem em um de primeira ordem, utilizando para isso variáveis auxiliares e
obtendo as seguintes equações:
wz
(43)
s
ssss
m
FFFFw
)( 3210
(44)
T
(45)

59
x
ssss
I
LFFLFFT 231120 )()(
(46)
F
(47)
y
sss
I
LFFLFFF 313032 )(4)(
(48)
iri Yx
(49)
r
piririsiisisirisi
im
xxkxYcxxkY
)()()(
(50)
O sistema agora pôde ser implementado e seguiu o fluxograma da Figura 36
para obtenção de sua solução.

60
Figura 36 – Fluxograma para solução do modelo proposto
Fonte: ELABORADA PELO AUTOR
Para avaliar a resposta do sistema, utilizou-se as seguintes excitações de
pista:
Degrau:
a) aplicado às quatro rodas simultaneamente;
b) aplicado somente nas rodas dianteiras;
c) aplicado nas rodas de um dos lados do veículo.
Impulso:
a) aplicado às quatro rodas simultaneamente;
b) aplicado somente nas rodas dianteiras;
c) aplicado nas rodas de um dos lados do veículo.

61
Rampa:
a) aplicada às quatro rodas simultaneamente.
Senoidal:
a) com frequência de 0.5Hz aplicada às quatro rodas simultaneamente;
b) com frequência de 1Hz aplicada às quatro rodas simultaneamente;
c) com frequência de 10Hz aplicada às quatro rodas simultaneamente.
Para todos os casos de excitação foi utilizado o máximo e o mínimo de
amortecimento, obtido a partir do protótipo desenvolvido, cujo valor foi de 587% e
estes adequados para os utilizados por (SATURNINO, 2004 e PATRÍCIO,2005).
Os parâmetros utilizados para a avaliação do modelo e simulações são
apresentados no Quadro 1:
Quadro 1 - Parâmetros utilizados para avaliação e simulação do modelo
Parâmetro Valor
Constante elástica dos Pneus 150000 [N/m]
Massa dos pneus 50 [kg]
Constante elástica das molas 15000 [N/m]
Massa do veículo 1513 [Kg]
Momento de inércia de roll (Ix) 640 [Kg.m²]
Momento de inércia de pitch (Iy) 2440 [Kg.m²]]
L1 0,5 [m]
L2 0,5 [m]
L3 1 [ m]
L4 1 [m]
Amortecimento mínimo 300 [N.s/m]
Amortecimento máximo 1800 [N.s/m]
Fonte: Dados da pesquisa

62
3.5 Avaliação do Tempo de Resposta
Todo sistema real demanda um tempo para que, ao ser estimulado, possa
gerar uma reação, e este tempo muitas vezes pode ser decisivo quando se deseja
implementar um modelo real após sua avaliação numérica.
Torna-se necessário avaliar os tempos de resposta dos elementos envolvidos.
No caso deste trabalho, dois tempos são determinantes, sendo eles o tempo de
atuação do amortecedor e o tempo de processamento do controle.
O tempo de atuação do amortecedor foi dado pelo intervalo entre os extremos
do valor do coeficiente de amortecimento. Para isso, conforme pode ser observado
na Figura 37, foram posicionadas duas chaves ópticas (indicada pelo número 1 na
Figura 37) defasadas de 16,2º uma da outra, para representar o ângulo entre a
mínima abertura e a máxima abertura do amortecedor.
Figura 37 – Experimento para determinação do tempo de resposta do
amortecedor
Fonte: ELABORADA PELO AUTOR
Um firmware desenvolvido para o experimento foi capaz de medir o tempo
necessário para que a chapa metálica (indicada pelo número 2 na Figura 37)
posicionada no eixo do motor vá de uma chave óptica à outra, medindo tanto o
tempo para abrir, quanto o tempo para fechar o amortecedor. A medição do tempo

63
foi realizada utilizando o timer do próprio microcontrolador, que possui uma
resolução de 0,2us.
Para a medição do tempo de resposta do sistema de controle, primeiro foi
levantado a ordem de complexidade do algoritmo sendo obtido O(4), tanto para seu
pior, quanto para seu melhor caso. Deste modo, para avaliar seu tempo de reposta,
foi gerado uma excitação na forma de impulso, conforme a figura 38, esta ação força
os amortecedores a se posicionarem na condição de máximo amortecimento.
Figura 38 – Excitação provocada no sistema de controle para medição
do tempo de resposta
Fonte: ELABORADA PELO AUTOR
O tempo desde a entrada do impulso no sistema até a resposta deste ao
estímulo, foi medido utilizando o timer do próprio microcontrolador, que foi disparado
no início do algoritmo e parado na obtenção da resposta.
Na medição dos dois tempos de resposta (amortecedor e sistema de
controle), o tempo foi obtido pelo envio dos mesmos via porta serial, para um
software instalado no microcomputador capaz de obter e visualizar os dados
recebidos do microcontrolador. Para ambos os casos foram realizadas sete
medições.
O tempo de resposta dos dois sistemas foi o tempo total do sistema, e sua
determinação foi de extrema importância para avaliar a real aplicabilidade deste
sistema em veículos automotores.
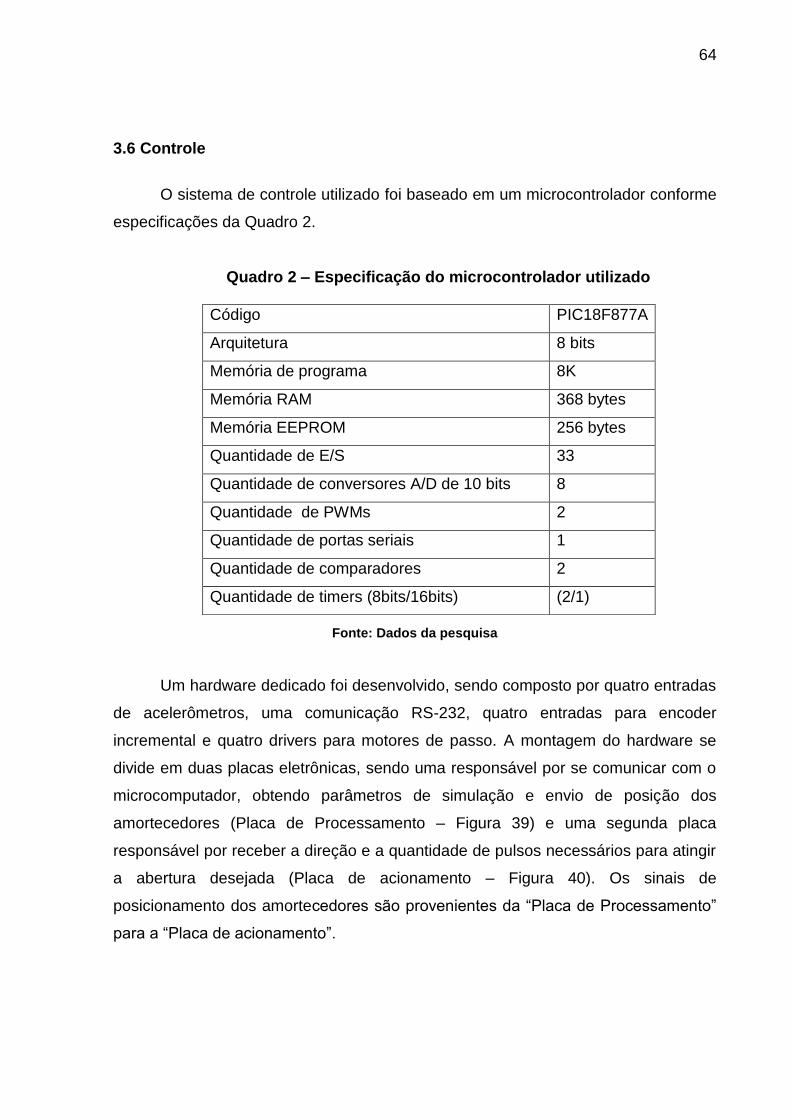
64
3.6 Controle
O sistema de controle utilizado foi baseado em um microcontrolador conforme
especificações da Quadro 2.
Quadro 2 – Especificação do microcontrolador utilizado
Fonte: Dados da pesquisa
Um hardware dedicado foi desenvolvido, sendo composto por quatro entradas
de acelerômetros, uma comunicação RS-232, quatro entradas para encoder
incremental e quatro drivers para motores de passo. A montagem do hardware se
divide em duas placas eletrônicas, sendo uma responsável por se comunicar com o
microcomputador, obtendo parâmetros de simulação e envio de posição dos
amortecedores (Placa de Processamento – Figura 39) e uma segunda placa
responsável por receber a direção e a quantidade de pulsos necessários para atingir
a abertura desejada (Placa de acionamento – Figura 40). Os sinais de
posicionamento dos amortecedores são provenientes da “Placa de Processamento”
para a “Placa de acionamento”.
Código PIC18F877A
Arquitetura 8 bits
Memória de programa 8K
Memória RAM 368 bytes
Memória EEPROM 256 bytes
Quantidade de E/S 33
Quantidade de conversores A/D de 10 bits 8
Quantidade de PWMs 2
Quantidade de portas seriais 1
Quantidade de comparadores 2
Quantidade de timers (8bits/16bits) (2/1)

65
Figura 39 – Placa de Processamento
Fonte: ELABORADA PELO AUTOR
Figura 40 – Placa de acionamento
Fonte: ELABORADA PELO AUTOR
A interligação das placas, assim como a ligação dos motores de passo à
“Placa de acionamento” pode ser observada na Figura 41, onde cada um dos quatro
motores representa um dos amortecedores do veículo.

66
Figura 41 – Montagem geral do sistema de controle
Fonte: ELABORADA PELO AUTOR
O sistema de controle não pôde ser implementado em um veículo real pelo
fato de não terem sido construídos amortecedores variáveis para as quatros rodas e
o protótipo do amortecedor ter sido fabricado com materiais de baixa resistência
mecânica. Por isso, para simular as respostas do veículo ao trafegar por diferentes
pistas, foi desenvolvido um software com o modelo do tópico 3.4 implementado, e
capaz de importar arquivos de pistas e simular obstáculos. Este software comunica
com a “Placa de Processamento”, passando a ela as acelerações das quatro rodas e
recebendo a atual posição dos quatro amortecedores. O fluxo de informações e
como o software comunica com a “Placa de Processamento” pode ser vista na
Figura 42.
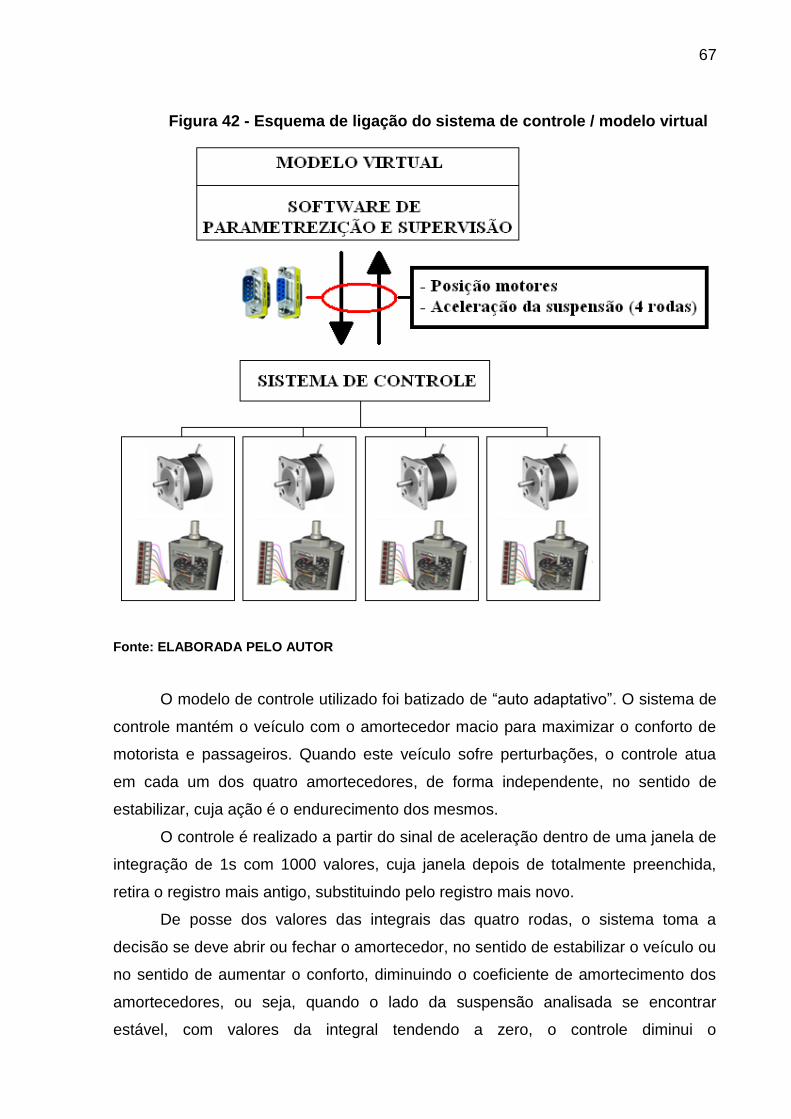
67
Figura 42 - Esquema de ligação do sistema de controle / modelo virtual
Fonte: ELABORADA PELO AUTOR
O modelo de controle utilizado foi batizado de “auto adaptativo”. O sistema de
controle mantém o veículo com o amortecedor macio para maximizar o conforto de
motorista e passageiros. Quando este veículo sofre perturbações, o controle atua
em cada um dos quatro amortecedores, de forma independente, no sentido de
estabilizar, cuja ação é o endurecimento dos mesmos.
O controle é realizado a partir do sinal de aceleração dentro de uma janela de
integração de 1s com 1000 valores, cuja janela depois de totalmente preenchida,
retira o registro mais antigo, substituindo pelo registro mais novo.
De posse dos valores das integrais das quatro rodas, o sistema toma a
decisão se deve abrir ou fechar o amortecedor, no sentido de estabilizar o veículo ou
no sentido de aumentar o conforto, diminuindo o coeficiente de amortecimento dos
amortecedores, ou seja, quando o lado da suspensão analisada se encontrar
estável, com valores da integral tendendo a zero, o controle diminui o

68
amortecimento, caso contrário, se o valor da integral variar repentinamente, o
controle aumenta o amortecimento proporcionalmente à variação ocorrida.
Quanto maior a variação da integral maior será o estágio de fechamento
obtido, aumentando com isso o coeficiente de amortecimento. O fluxograma do
firmware de controle, implementado na “Placa de processamento”, está descrito na
Figura 43.

69
Figura 43 - Fluxograma de funcionamento do algoritmo “auto adaptativo”
Início
Configuração
recebida?
Enviar posição dos
amortecedores
Obter aceleração da
suspensão
(4 rodas)
Integração realizada
para as 4 rodas?
Iniciar recebido?
Posição integração
roda(i) > Janela
integração?
Somar
(registro*ΔT) no
valor da
integração
Subtrair (registro mais
antigo * ΔT) e Somar
(registro*ΔT) no valor
da integração
Valor da integral = 0
Velocidade da
supsensão = 0
Aumentar
amortecimento
proporcional à
variação da integral
Diminuir
amortecimento
Recebeu parar?
SIM
NÃO
SIM
NÃO
SIM
NÃO
SIM
NÃO
SIMNÃO
SIM
NÃO
SIM
NÃO
Fonte: ELABORADA PELO AUTOR
70
Para avaliação do controle implementado, foram necessários resultados que
possibilitassem determinar sua eficácia. Para isso, os testes realizados utilizando o
controle, foram os mesmos realizados no modelo sem o controle. Deste modo, com
os resultados das simulações para o amortecimento de 300 e 1800 N.s/m sem a
utilização do controle, foi possível comparar estes resultados com os resultados
obtidos na simulação com controle.
Além disso, foram realizados testes com o veículo trafegando em uma pista
de asfalto, gerada por uma PSD e uma pista lisa composta por diversos obstáculos.
3.7 Modelo Virtual/Software de Supervisão e Parametrização
O modelo veicular implementado virtualmente por meio do software de
supervisão e parametrização é responsável por enviar as respostas de aceleração
do modelo ao sistema de controle e obter como resposta a posição dos furos dos
amortecedores, posição essa que ele utiliza para obter o atual coeficiente de
amortecimento, a partir do apontamento na tabela de “Posição x Amortecimento”. O
novo coeficiente substitui o coeficiente antigo e novos cálculos são feitos, gerando
novas acelerações para a entrada de pista imposta ao modelo.
A função do software é, além de ser um modelo virtual, promover uma
interface com o usuário, para que este possa inicializar os parâmetros de todo
sistema e visualizar as respostas obtidas durante o ensaio. Nesse sentido, por meio
do software tem-se à disposição as informações provenientes do sistema de
controle, simulando uma montagem real do veículo.
Os parâmetros que podem ser modificados são: rigidez de pneus e mola,
massas da roda e do veículo, momentos de inércia de pitch e roll, tabela de
“posição x coeficiente de amortecimento”, velocidade do veículo, comprimento da
pista, largura e comprimento do veículo, posição do centro de massa e escolha da
utilização do defasamento entre as rodas dianteiras e traseiras.
O software é capaz de importar pistas no formato “.xls”, “.txt” e “.dat” e aplicar
a esta obstáculos.
Os obstáculos implementados e que podem ser inseridos em qualquer
posição da pista são:
a) lombada e depressão, onde são informados amplitude e largura do
obstáculo;

71
b) sonorizador, informando largura e altura de pico e vale, além da largura
total do sonorizador;
c) pedra/Buraco, informando sua amplitude e largura, podendo estes
obstáculos serem aplicados em lados distintos do veículo.
Na parte de controle, o software permite rodar o modelo com ou sem o
controle implementado, permitindo inclusive fixar, no caso onde o controle não é
utilizado, o coeficiente de amortecimento, e nos casos onde o controle é utilizado a
posição mínima de amortecimento. Além disso, é possível escolher o instante em
que ocorrerá a alteração do coeficiente de amortecimento, que poderá ser feito
aleatoriamente ou esperar que a velocidade da suspensão seja zero.
O fluxograma da Figura 44, descreve como ocorre o fluxo do programa e a
intercomunicação entre o software e o sistema de controle.

72
Figura 44 - Fluxograma do software
Início
Iniciar?
Enviar
configuração
Enviar iniciar
Obter posição dos
amortecedores
Executar modelo
virtual
Enviar aceleração
da suspensão
(4 rodas)
Parar?
SIM
NÃO
SIMNÃO
Fonte: ELABORADA PELO AUTOR
Na tela de resultados, é possível obter, para cada ponto de entrada no
modelo, as respostas do deslocamento vertical, ângulo de pitch, ângulo de roll,
posição das quatro suspensões, posição dos quatro amortecedores, posição do
centro de massa, obstáculos utilizados e excitação de entrada em cada uma das
quatro rodas.

73
Nesta mesma tela são gerados resultados do RMS do deslocamento vertical e
a transformada de Fourier a cada 512 pontos de entrada realizados. Todos os
resultados podem ser exportados como “.xls” e “.txt”.
3.8 Avaliação das Condições de Pista
Para avaliação do controle trafegando em uma pista, foi utilizado o software
MDV desenvolvido em Matlab por Saturnino em 2004, cuja tela de parametrização e
perfil da pista pode ser vista na Figura 45.
Figura 45 – Software MDV
Fonte: SATURNINO, 2004

74
Este software possui uma PSD para pistas de asfalto e de acordo com os
parâmetros aplicados ele é capaz de gerar pistas aleatórias, onde as frequências e
amplitudes se equivalem às encontradas nas pistas reais.
Além da avaliação ao trafegar por uma pista de asfalto, foi realizado testes,
considerando uma pista totalmente lisa, onde foram inseridas lombada, depressões,
sonorizador, pedra e buraco para avaliar qual seria a resposta do controle ao ser
colocado num cenário causador de constantes instabilidades no veículo.

75
4 RESULTADOS
Os resultados obtidos a partir da metodologia proposta, podem ser
visualizados neste tópico
4.1 Avaliação da Variação do Coeficiente de Amortecimento
Os resultados obtidos na fabricação do amortecedor de coeficiente de
amortecimento variável, assim com o experimento para sua validação, são
apresentados neste tópico.
4.1.1 Protótipo
A Figura 46 apresenta as peças obtidas na máquina de prototipagem rápida,
geradas a partir das peças modeladas em CAD.
Figura 46 – Peças obtidas na máquina de prototipagem rápida
Fonte: ELABORADA PELO AUTOR

76
As peças geradas se mostraram bem fiéis ao modelo, sendo a maior variação
de dimensão obtida entre o modelo em CAD e o protótipo menores que 0,1mm.
O sistema de variação de área de passagem de óleo entre as câmaras pode
ser visto na figura 47, onde é possível três estágios de abertura. Na figura 47a, os
furos encontram-se totalmente excêntricos, na figura 47c totalmente concêntricos e
na figura 47b os furos encontram-se em um estágio intermediário, entre a máxima
abertura e a mínima abertura.
A máxima abertura resulta no menor coeficiente de amortecimento, por outro
lado a mínima abertura ou excentricidade máxima o maior coeficiente de
amortecimento.
Figura 47 – (A) Fechamento máximo (B) Posição intermediária (C)
Abertura Máxima
Fonte: ELABORADA PELO AUTOR
4.1.2 Experimento
Na realização do experimento, quatro etapas foram consideradas chaves para
a conclusão do experimento. A primeira delas, desenvolver um sistema de controle
capaz de imprimir velocidade constante no amortecedor a partir de uma referencia
de velocidade parametrizada.
Como segunda etapa, o desafio foi desenvolver um sistema capaz de imprimir
velocidade ao amortecedor com uma força suficiente para transpor óleo da câmara
inferior para a câmara superior, sem que a força necessária para esta operação
alterasse significativamente a velocidade na qual o amortecedor estivesse sendo
comprimido.
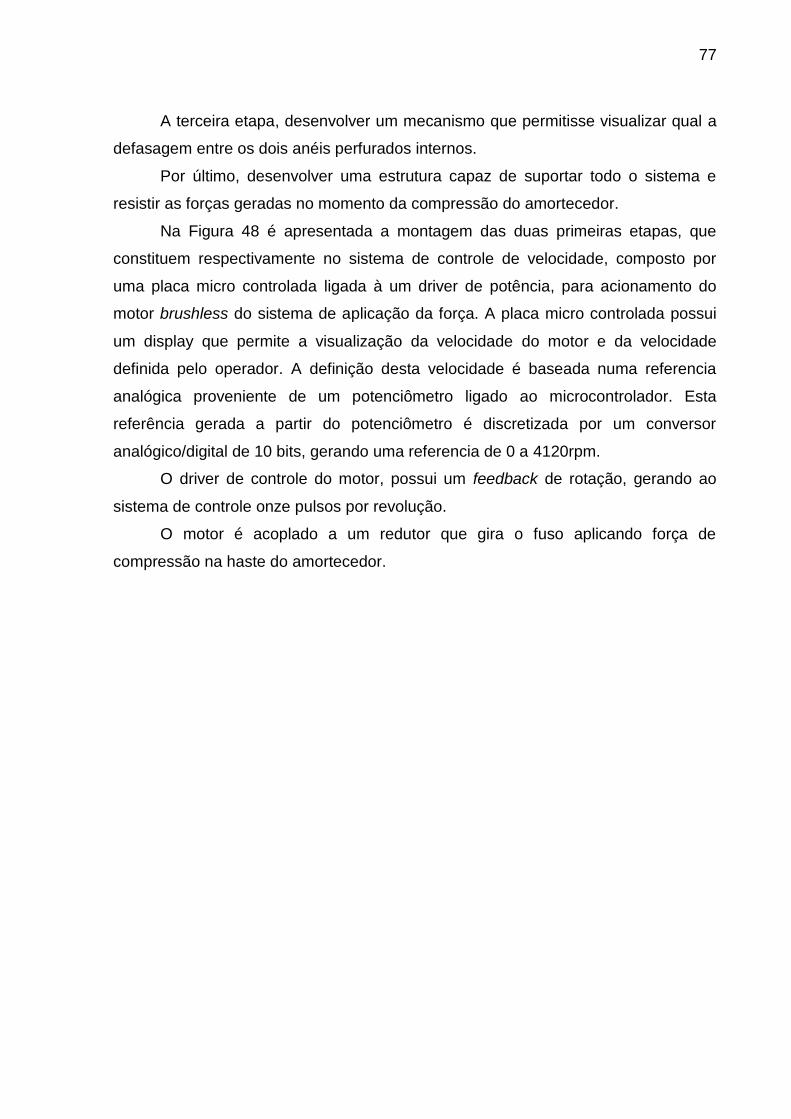
77
A terceira etapa, desenvolver um mecanismo que permitisse visualizar qual a
defasagem entre os dois anéis perfurados internos.
Por último, desenvolver uma estrutura capaz de suportar todo o sistema e
resistir as forças geradas no momento da compressão do amortecedor.
Na Figura 48 é apresentada a montagem das duas primeiras etapas, que
constituem respectivamente no sistema de controle de velocidade, composto por
uma placa micro controlada ligada à um driver de potência, para acionamento do
motor brushless do sistema de aplicação da força. A placa micro controlada possui
um display que permite a visualização da velocidade do motor e da velocidade
definida pelo operador. A definição desta velocidade é baseada numa referencia
analógica proveniente de um potenciômetro ligado ao microcontrolador. Esta
referência gerada a partir do potenciômetro é discretizada por um conversor
analógico/digital de 10 bits, gerando uma referencia de 0 a 4120rpm.
O driver de controle do motor, possui um feedback de rotação, gerando ao
sistema de controle onze pulsos por revolução.
O motor é acoplado a um redutor que gira o fuso aplicando força de
compressão na haste do amortecedor.

78
Figura 48 – Sistema de controle de velocidade e aplicação da força
Fonte: ELABORADA PELO AUTOR
Para a visualização do ângulo de abertura, um pino foi inserido na carcaça do
amortecedor com o intuito de servir como ponteiro, permitindo o apontamento do
ângulo de abertura sob um transferidor fixado à balança. A Figura 49 apresenta todo
o sistema utilizado para medição do ângulo.

79
Figura 49 – Sistema de medição do ângulo de abertura
Fonte: ELABORADA PELO AUTOR
Todo o sistema é apresentado na Figura 50, que apresenta na parte superior
o sistema de controle de velocidade e aplicação de força, e na parte inferior uma
balança para realização da medição da força aplicada.

80
Figura 50 – Sistema completo para avaliação do protótipo
Fonte: ELABORADA PELO AUTOR
4.1.3 Curvas de amortecimento obtidas
Para a avaliação do protótipo foram parametrizadas velocidades de rotação
de 1000, 1500, 2000, 2500, 3000, 3500 e 4000 rpm. Cada uma destas velocidades

81
foram aplicadas às aberturas de 0, 3,6, 7,2, 9, 12,6, 14,4 e 16,2º e as respectivas
forças geradas foram anotadas, permitindo gerar os gráficos das Figuras 51 à 57.
Figura 51 – Gráfico de Força x Velocidade para uma abertura de 16,2º
Fonte: ELABORADA PELO AUTOR
Figura 52 – Gráfico de Força x Velocidade para uma abertura de 14,4º
Fonte: ELABORADA PELO AUTOR
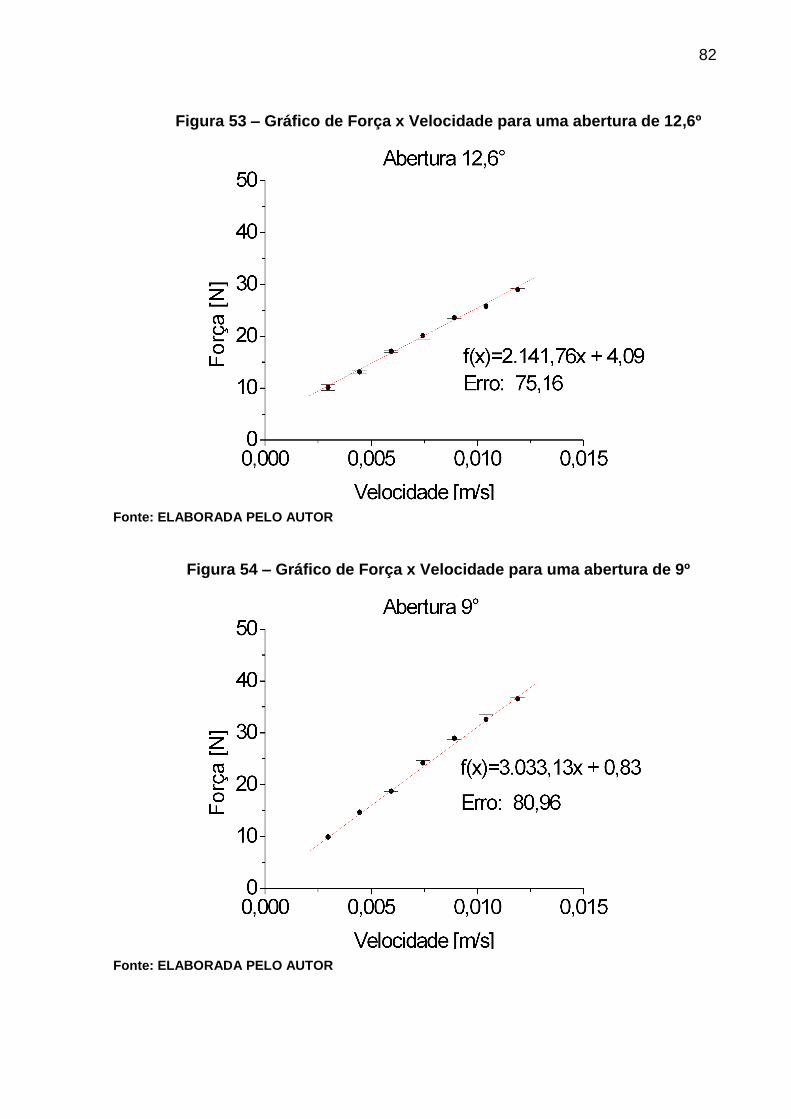
82
Figura 53 – Gráfico de Força x Velocidade para uma abertura de 12,6º
Fonte: ELABORADA PELO AUTOR
Figura 54 – Gráfico de Força x Velocidade para uma abertura de 9º
Fonte: ELABORADA PELO AUTOR
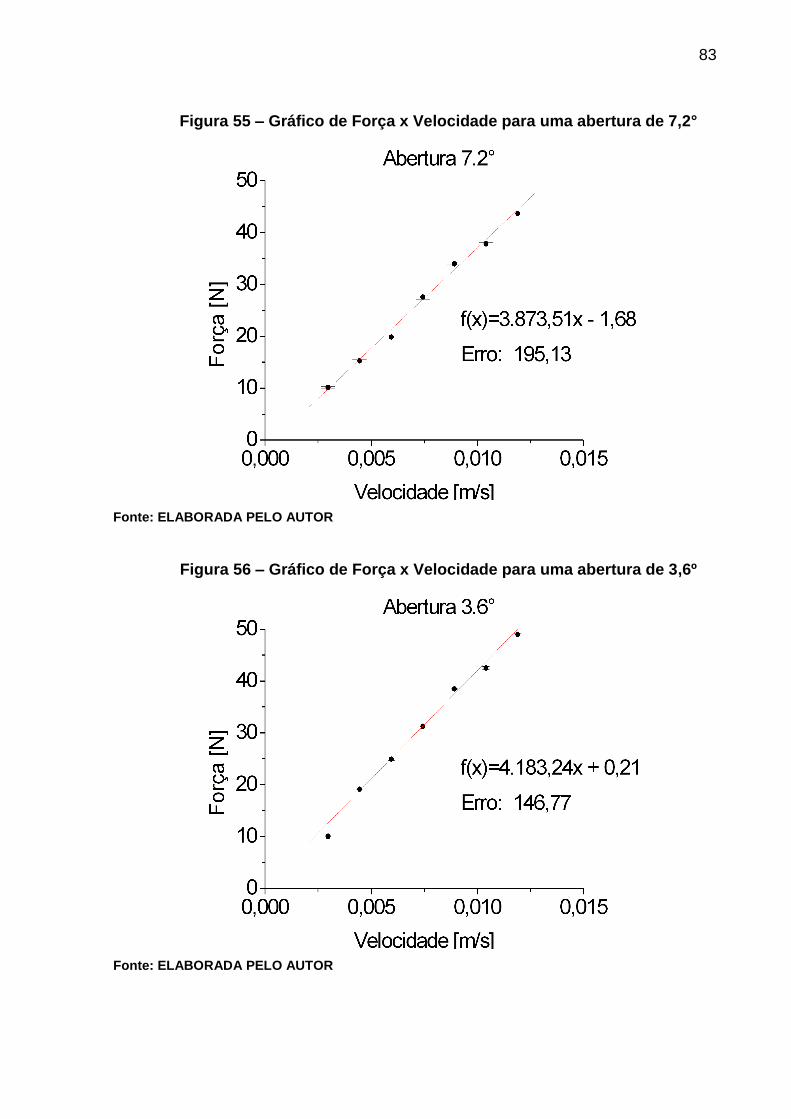
83
Figura 55 – Gráfico de Força x Velocidade para uma abertura de 7,2°
Fonte: ELABORADA PELO AUTOR
Figura 56 – Gráfico de Força x Velocidade para uma abertura de 3,6º
Fonte: ELABORADA PELO AUTOR

84
Figura 57 – Gráfico de Força x Velocidade para uma abertura de 0º
Fonte: ELABORADA PELO AUTOR
O Quadro 3 apresenta um resumo da variação do coeficiente de
amortecimento C, em função da abertura do amortecedor.
Quadro 3 – Abertura x Coeficiente de Amortecimento
Abertura [º] C [N.s/m]
0 4480,97
3,6 4183,24
7,2 3873,51
9 3033,13
12,6 2141,76
14,4 1757,05
16,2 762,61
Fonte: Dados da pesquisa

85
4.2 Avaliação do Tempo de Resposta do Amortecedor
A Figura 58 apresenta os resultados obtidos na avaliação do tempo
necessário para que o amortecedor vá do ponto de mínimo amortecimento para o
ponto de máximo amortecimento. Das sete medições de tempo coletadas, é possível
observar que não houve nenhuma variação do tempo de abertura e fechamento, e
que o máximo de erro nestas medições é de ±0.2us de acordo com a resolução do
timer do microcontrolador utilizado. Deste modo é possível observar que o tempo
máximo de resposta de atuação sobre os amortecedores é de 4,952ms.
Na Figura 59, as medições apresentadas são da resposta do sistema de
controle ao ser excitado com um degrau até a decisão de aumento de
amortecimento. Do mesmo modo como foi realizado com os motores, foram
efetuadas sete medições e em todas elas não houve variação dos resultados.
Novamente o erro foi de ±0.2us. O tempo para que se tenha toda a execução do
sistema de controle é de 1,538ms.
Figura 58 – Tempo de abertura e fechamento do amortecedor
Fonte: ELABORADA PELO AUTOR

86
Figura 59 – Tempo de resposta do controle
Fonte: ELABORADA PELO AUTOR
Para que se tenha o tempo máximo de resposta do sistema como um todo,
desde a entrada da pista nas rodas, até o movimento dos quatro amortecedores,
basta somar os dois tempos obtidos nos dois resultados anteriores, resultando em
6.490ms.
Nos experimentos realizados, notou-se que nas situações onde o modelo
além de sofrer uma perturbação passageira, era excitado com uma função senoidal,
ou seja, o que acontece na prática, uma vez que a pista gera excitações a todo
momento, ao se tomar a decisão de diminuir o coeficiente de amortecimento, esta
redução não podia ser realizada a qualquer instante, já que dependendo do
momento onde esta redução ocorria, o sistema antes estável poderia se tornar
instável.
Algumas tentativas foram feitas e a que apresentou menor instabilidade ao se
diminuir o coeficiente de amortecimento foi a de liberar o amortecimento somente no
momento em que a velocidade da respectiva suspensão (
SX ) fosse igual a zero.

87
Na Figura 60 é apresentada uma perturbação do tipo impulso. Para este tipo
de perturbação o coeficiente de amortecimento é levado ao valor máximo, visando
estabilizar o sistema e então levado ao valor mínimo ao se detectar que o sistema se
tornou estável. As respostas obtidas utilizando momentos diferentes para a
diminuição do coeficiente de amortecimento podem ser vista nas Figura 61 e 62 que
representam diminuição em momento aleatório e diminuição quando 0
SX
respectivamente. Nota-se que quando a perturbação é temporária, e pontual, o
momento em que ocorre a diminuição do coeficiente é irrelevante e não ocorrem
instabilidades provenientes das mudanças de amortecimento.
Figura 60 – Excitação do tipo impulso
Fonte: ELABORADA PELO AUTOR

88
Figura 61 – Resposta ao impulso com
SX aleatório
Fonte: ELABORADA PELO AUTOR
Figura 62 – Resposta ao impulso com 0
SX
Fonte: ELABORADA PELO AUTOR
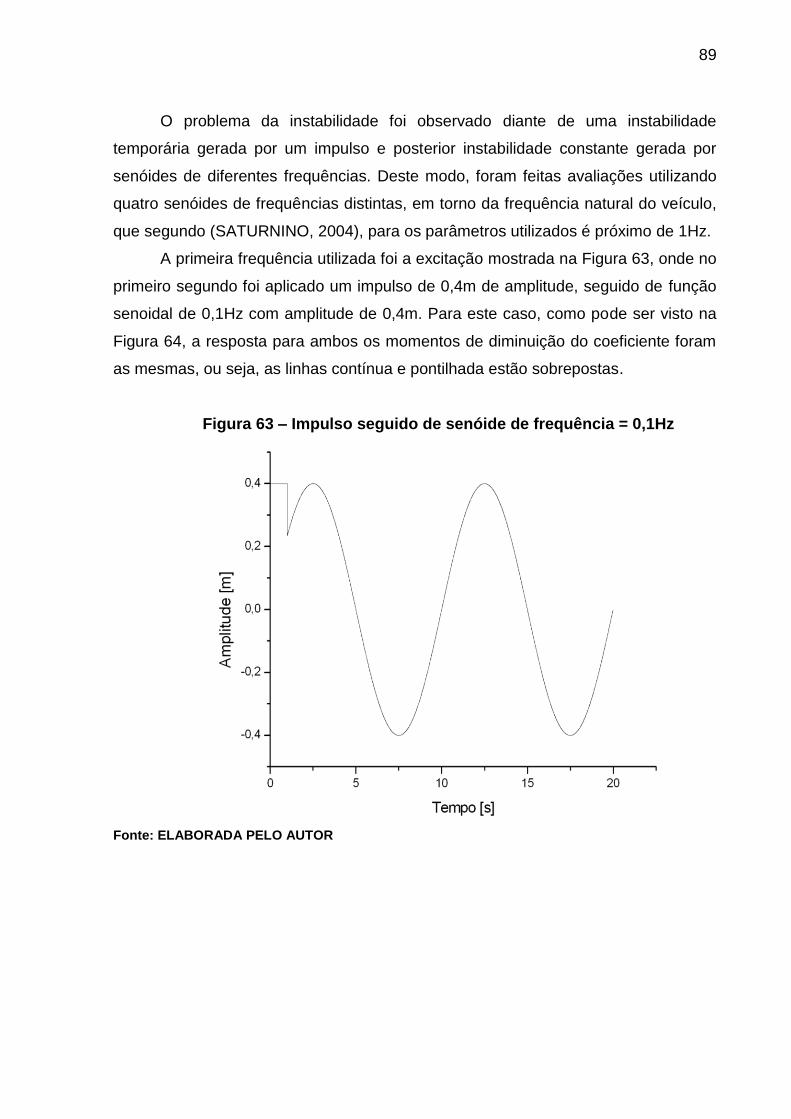
89
O problema da instabilidade foi observado diante de uma instabilidade
temporária gerada por um impulso e posterior instabilidade constante gerada por
senóides de diferentes frequências. Deste modo, foram feitas avaliações utilizando
quatro senóides de frequências distintas, em torno da frequência natural do veículo,
que segundo (SATURNINO, 2004), para os parâmetros utilizados é próximo de 1Hz.
A primeira frequência utilizada foi a excitação mostrada na Figura 63, onde no
primeiro segundo foi aplicado um impulso de 0,4m de amplitude, seguido de função
senoidal de 0,1Hz com amplitude de 0,4m. Para este caso, como pode ser visto na
Figura 64, a resposta para ambos os momentos de diminuição do coeficiente foram
as mesmas, ou seja, as linhas contínua e pontilhada estão sobrepostas.
Figura 63 – Impulso seguido de senóide de frequência = 0,1Hz
Fonte: ELABORADA PELO AUTOR

90
Figura 64 – Resposta do sistema ao impulso seguido de senóide de
frequência de 0,1Hz
Fonte: ELABORADA PELO AUTOR
No segundo caso, utilizou-se como frequência da senóide 1Hz e 0,4m de
amplitude, para coincidir com a frequência natural do veículo. A Figura 65 ilustra o
perfil da excitação realizada, onde inicialmente foi aplicado um impulso de 0,4m de
modo a obrigar ao sistema responder com aumento do coeficiente de
amortecimento. Logo em seguida foi aplicada uma senóide de frequência igual a
1Hz. Para este caso, conforme a Figura 66, é possível observar que o momento de
diminuição do coeficiente se torna importante, uma vez que tempos uma diferença
de 0,5m entre o momento onde 0
SX e um momento aleatório.

91
Figura 65 – Impulso seguido de senóide de frequência = 1Hz
Fonte: ELABORADA PELO AUTOR
Figura 66 - Resposta do sistema ao impulso seguido de senóide de
frequência de 1Hz
Fonte: ELABORADA PELO AUTOR

92
O caso mais curioso ocorreu com a aplicação da senoide com frequência
igual a 10Hz, conforme Figura 67. Neste caso ao se reduzir o coeficiente de
amortecimento, ocorreu uma instabilidade na suspensão de aproximadamente 4s,
como pode ser vista na Figura 68A e que se refletiu no controle com aumento e
diminuição do coeficiente de amortecimento mais de uma vez, conforme Figura 69,
tamanha a instabilidade gerada. Liberando o amortecimento quando 0
SX ,
conforme Figura 68B, o sistema tem uma rápida estabilização logo após a aplicação
do impulso e o controle aumentou e diminuiu o coeficiente uma única vez para gerar
a estabilização.
Figura 67 – Impulso seguido de senóide de frequência = 10Hz
Fonte: ELABORADA PELO AUTOR

93
Figura 68 - Resposta do sistema ao impulso seguido de senóide de
frequência de 10Hz. (A) - aleatórioX S
(B) - 0
SX
Fonte: ELABORADA PELO AUTOR
Figura 69 – Variação do coeficiente do amortecimento em resposta à
excitação com impulso seguido de senóide de 10Hz
Fonte: ELABORADA PELO AUTOR
O último perfil de excitação estudado para avaliação do momento exato de
diminuição do coeficiente de amortecimento é apresentado na Figura 70, impulso
seguido de senóide de frequência igual a 100Hz e a resposta obtida apresentada na
Figura 71.

94
Figura 70 – Impulso seguido de senóide de frequência = 100Hz
Fonte: ELABORADA PELO AUTOR
O resultado obtido apresenta alteração na resposta do sistema ao executar a
diminuição do amortecimento quando 0
SX e quando aleatórioX S
. A
instabilidade é pequena ao ser comparada com as frequências de 1Hz e 10Hz, o
que permite concluir que existe uma faixa próxima da frequência natural onde a
diminuição do coeficiente de amortecimento deve ser realizada com critério para não
provocar instabilidade no sistema.
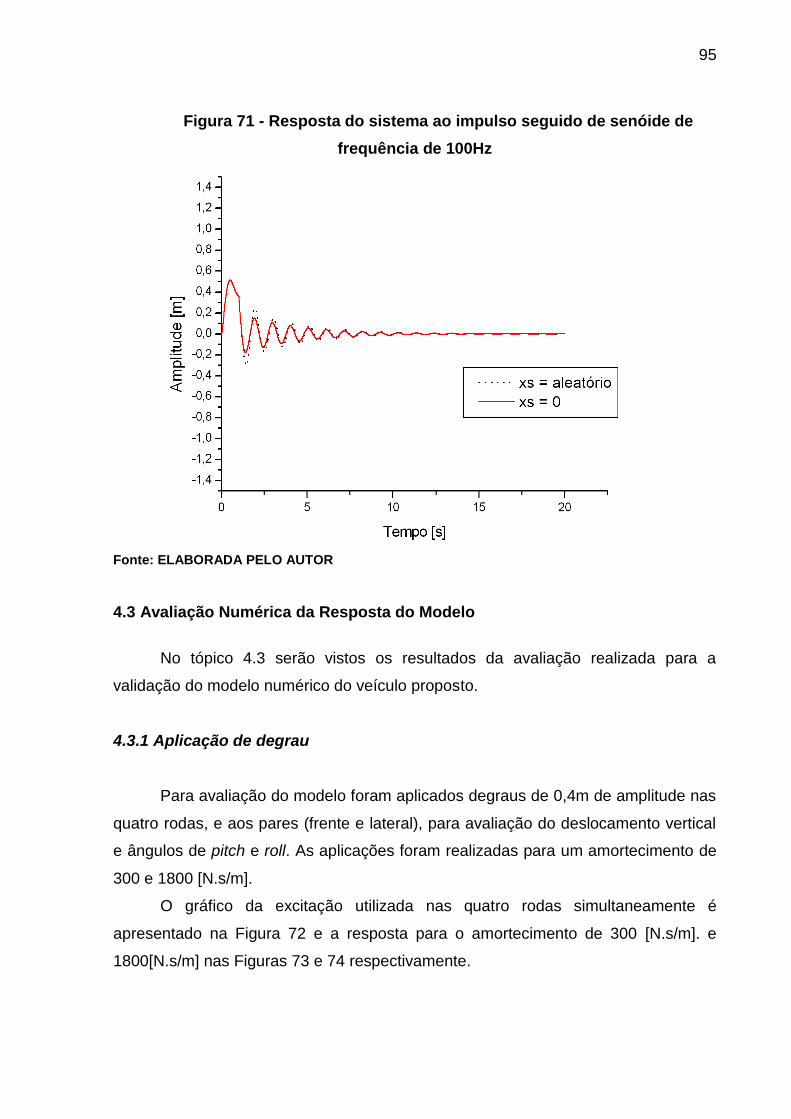
95
Figura 71 - Resposta do sistema ao impulso seguido de senóide de
frequência de 100Hz
Fonte: ELABORADA PELO AUTOR
4.3 Avaliação Numérica da Resposta do Modelo
No tópico 4.3 serão vistos os resultados da avaliação realizada para a
validação do modelo numérico do veículo proposto.
4.3.1 Aplicação de degrau
Para avaliação do modelo foram aplicados degraus de 0,4m de amplitude nas
quatro rodas, e aos pares (frente e lateral), para avaliação do deslocamento vertical
e ângulos de pitch e roll. As aplicações foram realizadas para um amortecimento de
300 e 1800 [N.s/m].
O gráfico da excitação utilizada nas quatro rodas simultaneamente é
apresentado na Figura 72 e a resposta para o amortecimento de 300 [N.s/m]. e
1800[N.s/m] nas Figuras 73 e 74 respectivamente.

96
Figura 72 – Excitação (Degrau 0,4m)
Fonte: ELABORADA PELO AUTOR
Figura 73 – Resposta ao degrau nas quatro rodas (C=300 [N.s/m]
Fonte: ELABORADA PELO AUTOR

97
Figura 74 – Resposta ao degrau nas quatro rodas (C=1800 [N.s/m])
Fonte: ELABORADA PELO AUTOR
Pelos gráficos obtidos, como foi aplicado o degrau simultaneamente nas
quatro rodas não se tem deslocamento em picth e roll em nenhum dos dois casos.
Para o deslocamento vertical, nota-se que, para o maior amortecimento tem-se uma
estabilização mais rápida e com menor quantidade de passagens pelo ponto de
estabilização, mas em ambos os casos como esperado, ocorre a estabilização a
0,4m de amplitude.
O gráfico da excitação utilizada apenas nas rodas dianteiras é apresentado na
Figura 72 e a resposta para o amortecimento de 300 [N.s/m]. e 1800[N.s/m] nas
Figuras 75 e 76 respectivamente.
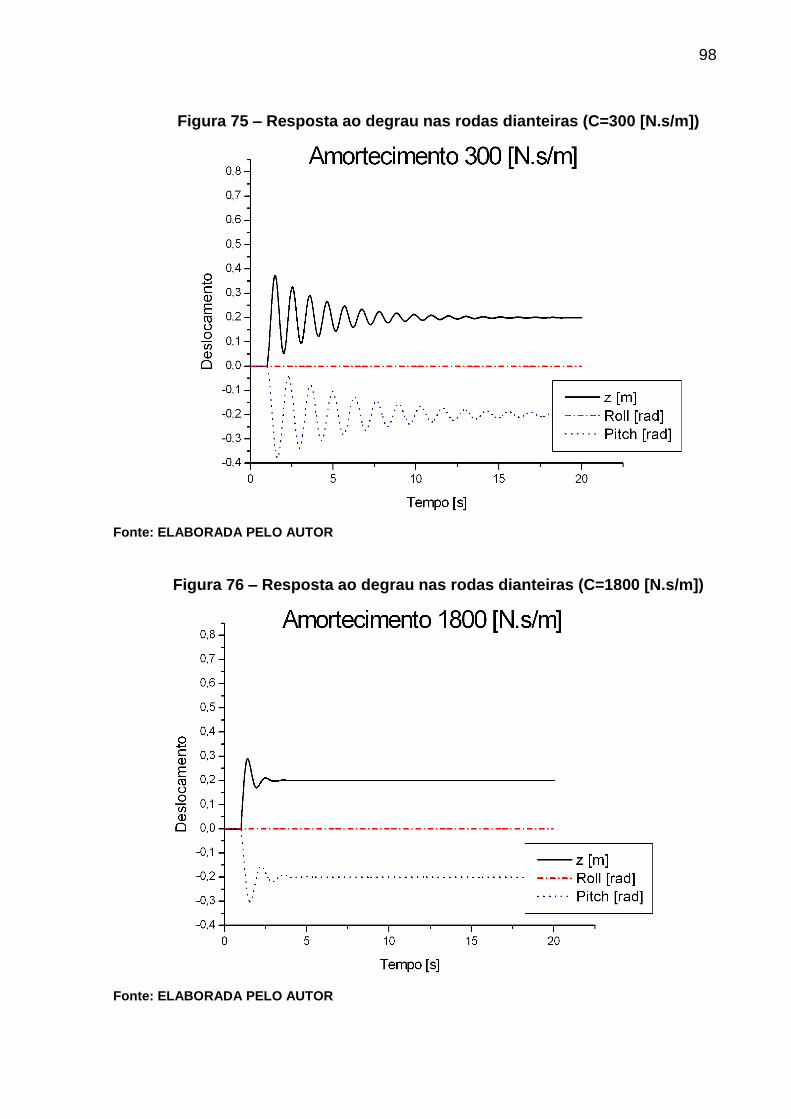
98
Figura 75 – Resposta ao degrau nas rodas dianteiras (C=300 [N.s/m])
Fonte: ELABORADA PELO AUTOR
Figura 76 – Resposta ao degrau nas rodas dianteiras (C=1800 [N.s/m])
Fonte: ELABORADA PELO AUTOR

99
Nos gráficos das Figuras 75 e 76 a excitação ocorreu apenas nas rodas
dianteiras provocando como esperado um ângulo de pitch e deslocamento vertical,
não ocorrendo nenhuma variação no ângulo de roll.
A estabilização ocorreu mais rápida com o amortecimento maior, sendo que,
para o deslocamento vertical a estabilização ocorreu a 0,2m e com um ângulo de
-0,2rad, indicando que o carro finalizou com a dianteira com amplitude maior que a
traseira, proporcionando um ângulo no veículo no sentido longitudinal de 11,46°.
O gráfico da excitação utilizada apenas nas rodas de um dos lados do veículo
é apresentado na Figura 72 e a resposta para o amortecimento de 300 [N.s/m]. e
1800[N.s/m] nas figura 77 e 78 respectivamente.
Figura 77 – Resposta ao degrau nas rodas do lado do motorista
(C=300 [N.s/m])
Fonte: ELABORADA PELO AUTOR

100
Figura 78 – Resposta ao degrau nas rodas do lado do motorista
(C=1800 [N.s/m])
Fonte: ELABORADA PELO AUTOR
Nos gráficos das Figuras 77 e 78 a excitação ocorreu apenas nas rodas dos
lados do condutor provocando como esperado um ângulo de roll e deslocamento
vertical, não ocorrendo nenhuma variação no ângulo de pitch.
A estabilização ocorreu mais rápida com o amortecimento maior, sendo que,
para o deslocamento vertical a estabilização ocorreu a 0,2m e com um ângulo de
0,4rad, indicando que o carro finalizou com o lado do condutor com amplitude maior
que o lado do passageiro, proporcionando um ângulo no veículo no sentido
transversal de 22,93°.
Vale ressaltar que o ângulo de roll para este caso, é duas vezes maior que o
ângulo de pitch, quando o degrau foi aplicado às rodas dianteiras do veículo, isto
porque a dimensão longitudinal é duas vezes maior que a dimensão transversal.
4.3.2 Impulso
Para avaliação do modelo foram aplicados impulsos de 0,4m de amplitude
nas quatro rodas, e aos pares (frente e lateral), para avaliação do deslocamento

101
vertical e ângulos de pitch e roll. As aplicações foram realizadas para um
amortecimento 300 e 1800 [N.s/m].
O gráfico da excitação utilizada nas quatro rodas simultaneamente é
apresentado na Figura 79 e a resposta para o amortecimento de 300 [N.s/m]. e
1800[N.s/m] nas figura 80 e 81 respectivamente.
Conforme esperado, ocorre apenas deslocamento vertical. O deslocamento
vertical oscila em torno do ponto zero e demora aproximadamente 15s (Figura 80)
para estabilizar com o coeficiente de amortecimento mínimo e aproximadamente 3s
(Figura 81) para estabilizar com o amortecimento máximo de 1800N.s/m.
Figura 79 – Excitação (Impulso 0,4m)
Fonte: ELABORADA PELO AUTOR
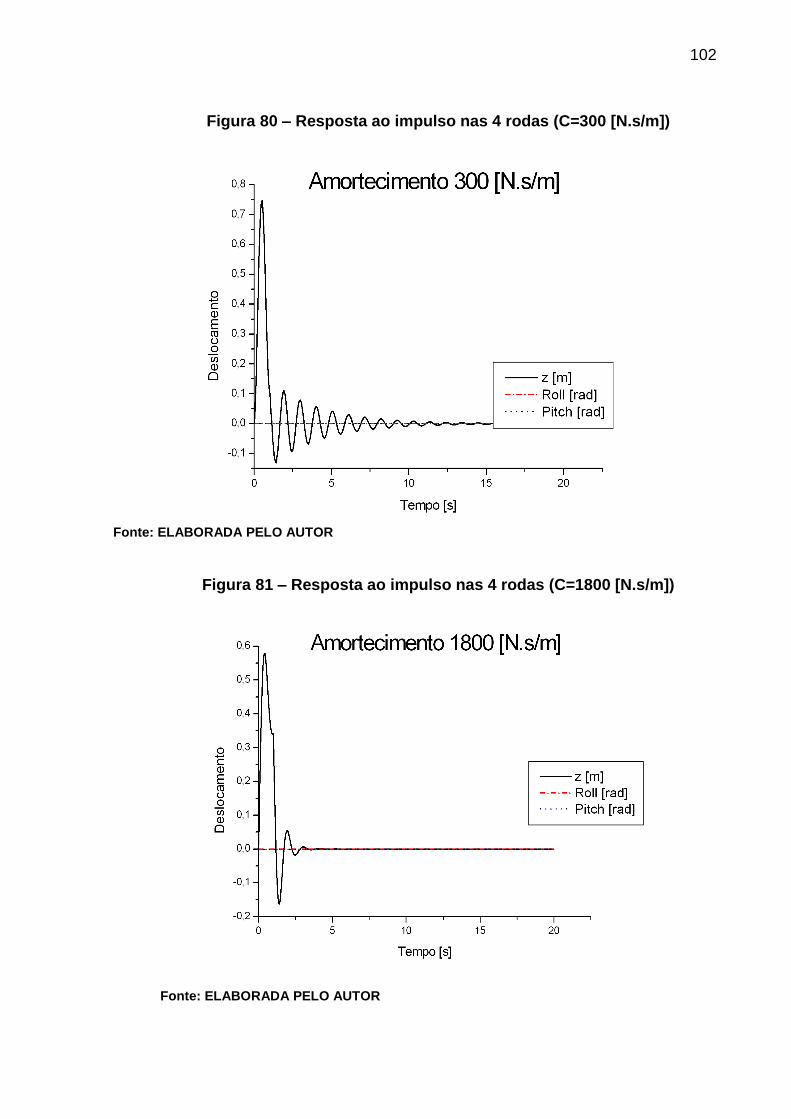
102
Figura 80 – Resposta ao impulso nas 4 rodas (C=300 [N.s/m])
Fonte: ELABORADA PELO AUTOR
Figura 81 – Resposta ao impulso nas 4 rodas (C=1800 [N.s/m])
Fonte: ELABORADA PELO AUTOR

103
A aplicação do impulso da Figura 79 apenas nas rodas dianteiras, gera as
respostas da Figura 82 e 83 para os coeficientes de 300 e 1800 respectivamente.
Pode-se observar que não é detectada a ocorrência do ângulo de roll,
somente deslocamento vertical e ângulo de pitch, isto porque ao aplicar o impulso
somente nas rodas dianteiras a tendência é girar o veículo em torno do eixo
respectivo à sua largura. O coeficiente de amortecimento igual a 300 faz com que o
deslocamento vertical se estabilize em aproximadamente 18s e o ângulo de pitch
não se estabilize dentro dos 20s analisados. Por outro lado, um maior coeficiente de
amortecimento estabiliza todos os movimentos analisados do veículo em menos de
3s.
Figura 82 – Resposta ao impulso nas rodas dianteiras (C=300 [N.s/m])
Fonte: ELABORADA PELO AUTOR

104
Figura 83– Resposta ao impulso nas rodas dianteiras (C=1800 [N.s/m])
Fonte: ELABORADA PELO AUTOR
As respostas apresentadas nas Figuras 84 e 85, para um amortecimento de
300 e 1800 N.s/m respectivamente, são as respostas do veículo ao serem excitados
quando aplicada a excitação da Figura 79 nas rodas do lado do motorista.
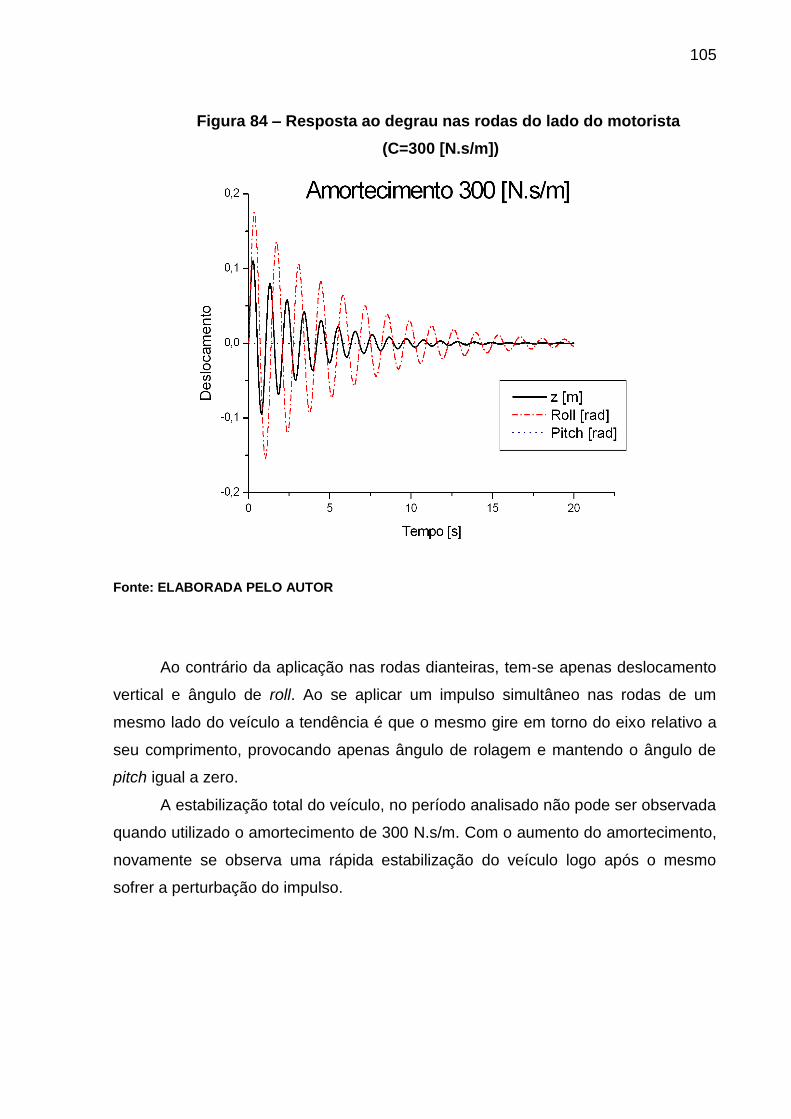
105
Figura 84 – Resposta ao degrau nas rodas do lado do motorista
(C=300 [N.s/m])
Fonte: ELABORADA PELO AUTOR
Ao contrário da aplicação nas rodas dianteiras, tem-se apenas deslocamento
vertical e ângulo de roll. Ao se aplicar um impulso simultâneo nas rodas de um
mesmo lado do veículo a tendência é que o mesmo gire em torno do eixo relativo a
seu comprimento, provocando apenas ângulo de rolagem e mantendo o ângulo de
pitch igual a zero.
A estabilização total do veículo, no período analisado não pode ser observada
quando utilizado o amortecimento de 300 N.s/m. Com o aumento do amortecimento,
novamente se observa uma rápida estabilização do veículo logo após o mesmo
sofrer a perturbação do impulso.

106
Figura 85 – Resposta ao degrau nas rodas do lado do motorista
(C=1800 [N.s/m])
Fonte: ELABORADA PELO AUTOR
4.3.3 Rampa
Para a avaliação da resposta do modelo à rampa, foi utilizada a defasagem
entre as rodas dianteiras e as rodas traseiras, ou seja, a pista aplicada nas rodas
dianteiras é aplicada às rodas traseiras com o defasamento do comprimento do
veículo. A não utilização desta defasagem provocaria apenas deslocamento vertical,
uma vez que todas as rodas do veículo se elevariam juntas. O veículo se estabiliza
com um ângulo de pitch igual a zero, sem sofrer a inclinação de 1,9° da rampa.
Deste modo, uma simulação mais precisa, necessita da inserção da
defasagem entre as rodas.

107
Figura 86 – Excitação (Rampa 1,9°)
Fonte: ELABORADA PELO AUTOR
A Figura 86 ilustra a excitação utilizada para esta avaliação. As Figuras 87 e
88 ilustram as respostas para o coeficiente de amortecimento igual a 300 N.s/m,
observando o deslocamento vertical e ângulo de pitch respectivamente, e as figuras
89 e 90 as respectivas avaliações do deslocamento vertical e ângulo de pitch para o
amortecimento de 1800N.s/m.
Pode-se observar que o deslocamento vertical tanto para o coeficiente de
300, quanto para o amortecimento de 1800N.s/m a estabilização ocorre conforme
esperado a 20m de altura, ou seja, a mesma elevação da rampa. O momento de
instabilidade ocorre quando o veículo entra na rampa, que coincide com a maior
instabilidade também no ângulo de pitch, isto porque a frente do veículo se eleva por
um tempo, permanecendo a traseira com amplitude igual a zero até que o
comprimento do veículo tenha todo se elevado. Neste período o ângulo de pitch
aumenta, até que a roda traseira entre na rampa, tornando o ângulo de pitch
constante até o final da rampa.
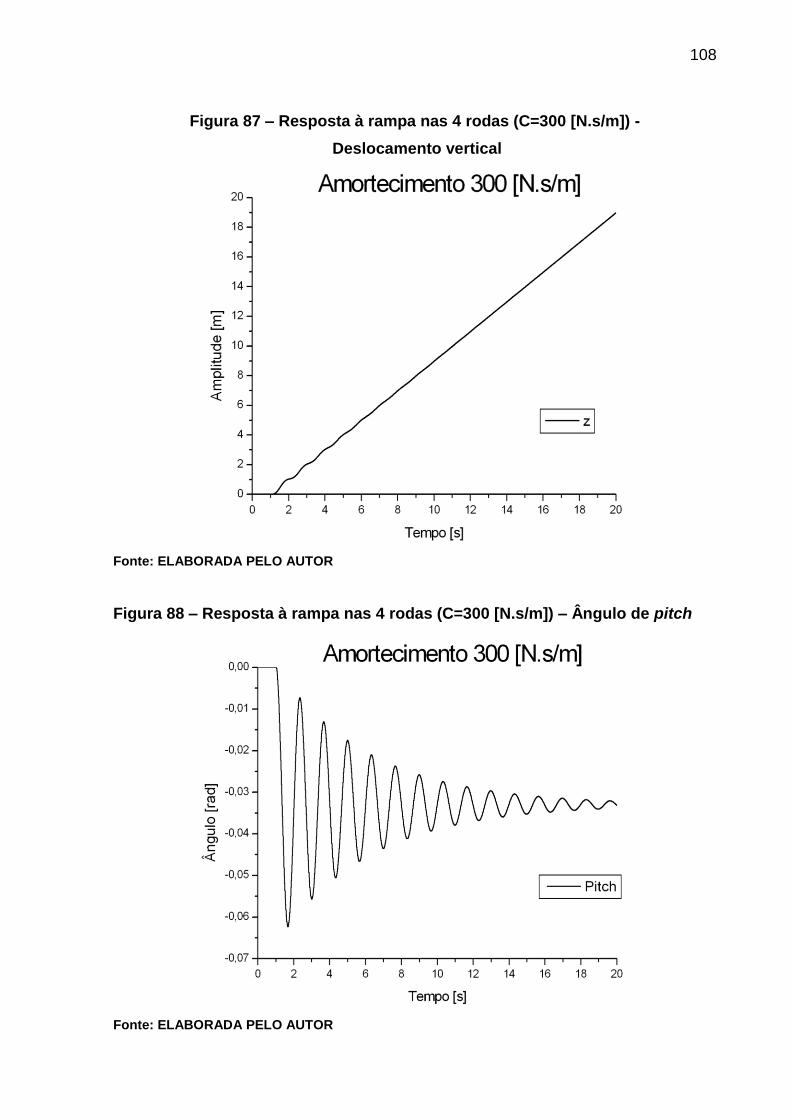
108
Figura 87 – Resposta à rampa nas 4 rodas (C=300 [N.s/m]) -
Deslocamento vertical
Fonte: ELABORADA PELO AUTOR
Figura 88 – Resposta à rampa nas 4 rodas (C=300 [N.s/m]) – Ângulo de pitch
Fonte: ELABORADA PELO AUTOR

109
Nas Figuras 88 e 90 é possível observar que o tempo de estabilização do
amortecimento de 300 é muito maior que o tempo de estabilização do
amortecimento de 1800. Não é possível determinar exatamente quanto, uma vez
que para um amortecimento de 300N.s/m e no período de 20s, não ocorreu a
estabilização. Mas o tempo é maior do que quatro vezes o valor do tempo de
estabilização do amortecimento de 1800N.s/m.
O ângulo de estabilização do chassis é em torno dos 1,9°, que é a mesma
inclinação da rampa.
Figura 89 – Resposta à rampa nas 4 rodas (C=1800 [N.s/m]) -
Deslocamento vertical
Fonte: ELABORADA PELO AUTOR

110
Figura 90 – Resposta à rampa nas 4 rodas (C=1800 [N.s/m]) – Ângulo de
pitch
Fonte: ELABORADA PELO AUTOR
4.3.4 Senóide
Nas figuras 91 a 92 é possível observar as respostas do deslocamento
vertical obtidas ao serem aplicadas funções senoidais ao modelo implementado.
As aplicações se deram nas quatro rodas simultaneamente e foram realizadas
em três frequências distintas de 0,5Hz, 1Hz e 10Hz. As frequências foram
escolhidas de modo a excitar o veículo na sua frequência natural, com uma
frequência inferior e outra superior.
Para frequência de excitação igual a 0.5Hz, nota-se pelo gráfico da Figura 91,
que para um menor amortecimento (300 N.s/m) as amplitudes atingidas são
ligeiramente maiores do que as amplitudes para um amortecimento de 1800 N.s/m,
mas ambas giram em torno da amplitude de 0,4m da função senoidal aplicada,
indicando que não houve amplificação.
Diferente dos resultados obtidos pela excitação de 0,5Hz, com uma excitação
de 1Hz, conforme era esperado, para um menor amortecimento, ocorre amplificação

111
do movimento, chegando a valores de amplitudes quase sete vezes maiores do que
a excitação aplicada.
Figura 91 – Excitação senoidal de frequência igual a 0.5Hz
Fonte: ELABORADA PELO AUTOR
Figura 92 – Excitação senoidal de frequência igual a 1Hz
Fonte: ELABORADA PELO AUTOR

112
Os resultados obtidos para uma excitação senoidal de 10Hz (Figuras 93 e
94), ao serem defrontados os resultados para mínimo e máximo amortecimentos,
pode-se notar que ocorre uma inversão ao serem comparados com os resultados
para a excitação de 0,5Hz. Para a menor frequência (0.5Hz), um menor
amortecimento ocasiona uma maior amplitude de estabilização, ao contrário, para a
frequência de 10Hz, o maior amortecimento, ocasiona uma amplitude ligeiramente
maior que as amplitudes de estabilização para o menor amortecimento.
Figura 93 – Excitação senoidal de frequência igual a 10Hz –
C=300[N.s/m]
Fonte: ELABORADA PELO AUTOR

113
Figura 94 – Excitação senoidal de frequência igual a 10Hz –
C=1800[N.s/m]
Fonte: ELABORADA PELO AUTOR
Os resultados obtidos estão de acordo com o esperado pela teoria (Tópico 2.7
– Figura 24), uma vez que ao se analisar o gráfico de transmissibilidade de sistemas
de segunda ordem, pode-se notar que para frequências menores do que a
frequência natural amortecida, a tendência é que se igualem os ganhos para
qualquer valor de amortecimento utilizado, sendo que ao se aproximarem pela
esquerda da frequência natural amortecida, quanto menor o amortecimento, maiores
serão os ganhos.
Por outro lado, ao aumentarmos as frequências de excitação acima da
frequência natural amortecida, ocorre um instante em que há uma inversão nos
ganhos e um maior amortecimento, provoca um ganho maior do que um menor
amortecimento. A tendência assim como ocorre em baixas frequências, é que, para
frequências muito altas, os valores diferentes de amortecimento passam a ser
insignificantes nos ganhos ocorridos.

114
Uma faixa que merece muita atenção é a faixa próxima à frequência natural
amortecida, onde se pode perceber tanto pelos resultados obtidos, quanto pela
teoria, que pode ocorrer uma amplificação muito grande do movimento ao se manter
o amortecimento em valores muito baixos, podendo ocasionar para o veículo uma
instabilidade muito grande.
4.4 Avaliação do controle
A avaliação da eficácia do controle foi realizada em duas etapas: aplicando as
mesmas excitações que foram utilizadas para validação do modelo sem o controle,
utilizando, ora amortecimento máximo, ora amortecimento mínimo e excitação do
modelo com controle utilizando duas pistas distintas.
As pistas utilizadas foram uma pista lisa com alguns obstáculos e uma pista
de asfalto gerada a partir de uma PSD. Neste tópico são apresentados os resultados
para as avaliações feitas sobre as mesmas excitações do modelo sem o controle e
no Tópico 4.6, os resultados quando utilizado o controle no trafego do veículo sobre
duas pistas geradas.
4.4.1 Degrau
Os resultados obtidos ao se aplicar um degrau ao modelo do veículo
utilizando o controle proposto podem ser observados nas Figuras 95 e 96.
A Figura 96 apresenta o deslocamento da roda e a ação do controle em
resposta a esse deslocamento. É possível observar que o amortecimento passa do
valor mínimo ao máximo logo após o início da variação da posição e volta ao valor
mínimo quando ocorre a estabilização. A mesma resposta é observada nas quatro
rodas, mas para uma melhor visualização, na Figura 96 é apresentada a resposta
apenas de umas das rodas.
As respostas para deslocamento vertical, ângulo de pitch e roll se
assemelham aos resultados obtidos para a mesma excitação do modelo sem o uso
do controle com amortecimento de 1800 N.s/m (Figura 74), exceto pelo fato de que o
tempo para estabilização utilizando o controle foi ligeiramente maior que o tempo
sem a utilização do controle.
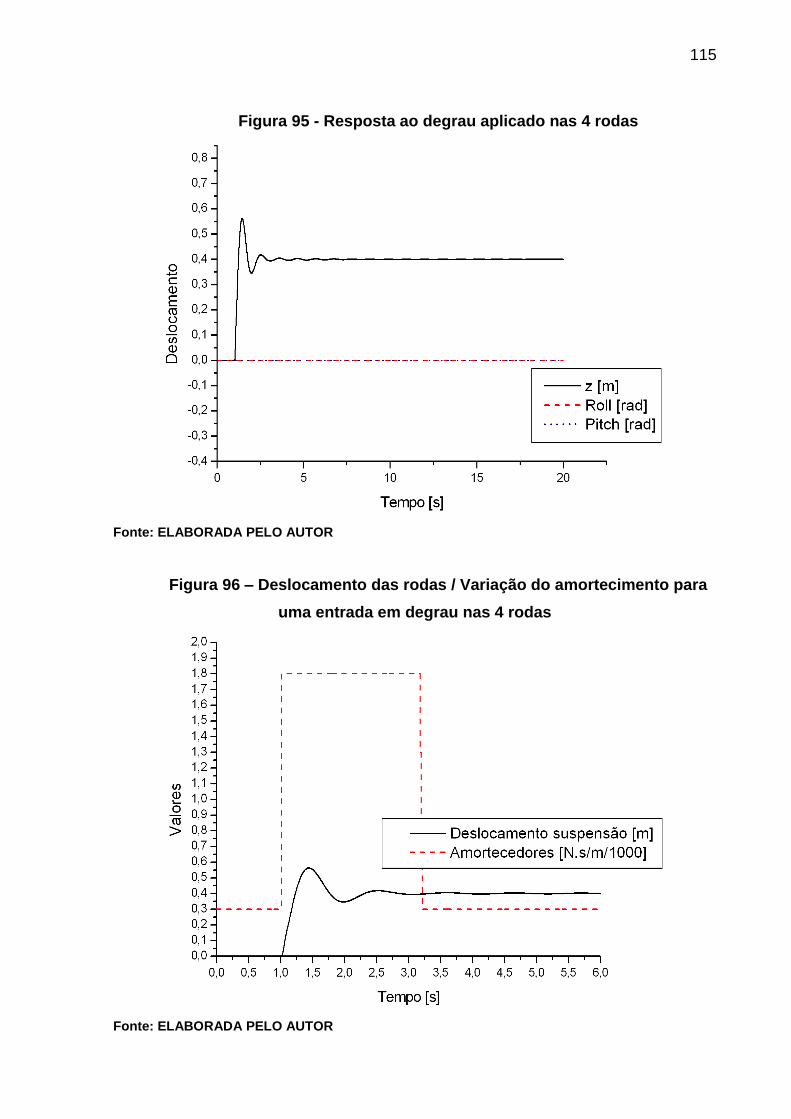
115
Figura 95 - Resposta ao degrau aplicado nas 4 rodas
Fonte: ELABORADA PELO AUTOR
Figura 96 – Deslocamento das rodas / Variação do amortecimento para
uma entrada em degrau nas 4 rodas
Fonte: ELABORADA PELO AUTOR

116
Assim como foram expostos os resultados para aplicação do degrau nas 4
rodas, as Figuras 97 e 98, representam os resultados obtidos ao se aplicar um
degrau apenas nas rodas dianteiras do veículo, com uma única diferença, neste
caso a aplicação da excitação se dando apenas nas rodas dianteiras, as respostas
do controle para as rodas traseiras são diferentes das rodas dianteiras, por isso, a
Figura 98, apresenta a resposta para as rodas dianteiras (A) e para as traseiras (B).
É interessante observar a proporcionalidade do controle, uma vez que o
amortecimento atinge 1800 N.s/m onde ocorre a aplicação do degrau e 800 N.s/m
para as rodas traseiras que sofrem deslocamento em conseqüência dos
deslocamentos da roda dianteira.
Nota-se que pela Figura 97, a estabilização do deslocamento vertical se
assemelha às da Figura 76, já o ângulo de pitch demora quase três vezes mais para
estabilizar, mas mesmo assim com tempo inferior ao encontrado quando o
amortecimento é mínimo (Figura 75).
Figura 97 - Resposta ao degrau aplicado nas rodas dianteiras
Fonte: ELABORADA PELO AUTOR

117
Figura 98 - Deslocamento das rodas / Variação do amortecimento para
uma entrada em degrau nas rodas dianteiras. (A) Amortecedor dianteiro (B)
Amortecedor traseiro
Fonte: ELABORADA PELO AUTOR
A aplicação do degrau nas rodas laterais do veículo (Figuras 99 e 100)
provoca respostas parecidas com as respostas quando a aplicação ocorre somente
nas rodas dianteiras. A diferença é que neste caso, ao invés de se ter ângulo de
pitch, tem-se ângulo de roll. Novamente a estabilização do deslocamento vertical se
assemelha aos resultados para o maior amortecimento e o ângulo de roll, uma
resposta intermediária entre o maior amortecimento e o menor amortecimento.

118
Figura 99 - Resposta ao degrau aplicado nas rodas do lado do motorista
Fonte: ELABORADA PELO AUTOR
Figura 100 - Deslocamento das rodas / Variação do amortecimento para
uma entrada em degrau nas rodas do lado do motorista. (A) Amortecedor lado
motorista (B) Amortecedor lado passageiro
“A” “B”
Fonte: ELABORADA PELO AUTOR

119
4.4.2 Impulso
A Figuras 101 e 102 apresentam respectivamente as respostas obtidas no
chassi do veículo e o deslocamento ocorrido nas quatro suspensões, bem como a
resposta do modelo, para um impulso de 0,4m aplicado nas quatro rodas
simultaneamente.
Figura 101 - Resposta ao impulso aplicado nas 4 rodas
Fonte: ELABORADA PELO AUTOR
Os ângulos de pitch e roll são nulos, uma vez que a aplicação ocorre
simultaneamente nas quatro rodas. O deslocamento vertical atinge uma amplitude
de 0,55m e se estabiliza em aproximadamente 4s, ou seja, 3s após ter sido aplicado
o impulso. O resultado se assemelha ao resultado obtido para a mesma excitação
utilizando amortecimento máximo e fixo, sendo que mais uma vez a única diferença
é um tempo de estabilização ligeiramente maior quando o controle foi utilizado.

120
Figura 102 - Deslocamento da suspensão / Amortecimento para
excitação impulso aplicado as 4 rodas
Fonte: ELABORADA PELO AUTOR
A aplicação de impulso somente nas rodas dianteiras, como pode ser visto na
Figura 103, resulta em rotação em torno do eixo paralelo à largura do veículo,
causando um ângulo de pitch e conseqüente deslocamento vertical. Esta rotação é
causada por um deslocamento nas rodas dianteiras e deslocamento das rodas
traseiras em sentido oposto às dianteiras. As rodas dianteiras sofrem um
deslocamento maior por serem o ponto de aplicação da excitação e por isso, a
resposta do controle é diferente para as rodas dianteiras em comparação com as
rodas traseiras como pode ser visto na Figura 104.

121
Figura 103 - Resposta ao impulso aplicado nas rodas dianteiras
Fonte: ELABORADA PELO AUTOR
Figura 104 - Deslocamento da suspensão / Amortecimento para
excitação impulso (A) Suspensões dianteiras (B) Suspensões traseiras
“A” “B”
Fonte: ELABORADA PELO AUTOR
Os últimos resultados com a aplicação de impulso foram obtidos com a
aplicação da excitação nas rodas do lado do motorista. Esta aplicação causa um

122
ângulo de rotação no veículo e conseqüente deslocamento vertical, permanecendo o
ângulo de pitch nulo como pode ser visto na Figura 105.
Figura 105 - Resposta ao impulso aplicado nas rodas do lado do
motorista
Fonte: ELABORADA PELO AUTOR
Pode-se notar que com a utilização do controle o tempo de estabilização é
maior que com o uso do amortecimento de 1800 N.s/m fixo, mas menor do que com
o uso do amortecimento de 300 N.s/m.
Pela Figura 106 é possível observar que logo após o início da aplicação do
impulso, o controle aumenta o amortecimento, e permanece assim 0,5s após o fim
da aplicação do impulso, ou seja, em 0,5s as acelerações nas suspensões já estão
em níveis considerados estáveis e com isso o amortecimento é reduzido.

123
Figura 106 - Deslocamento da suspensão / Amortecimento para
excitação impulso (A) Suspensões lado motorista (B) Suspensões lado traseiro
“A” “B”
Fonte: ELABORADA PELO AUTOR
4.3.3 Rampa
O deslocamento vertical e o ângulo de pitch na aplicação de uma rampa,
passa por instabilidade apenas no momento em que o veículo entra na rampa.
Pode-se observar pelas Figuras 107 e 108, deslocamento vertical e ângulo de pitch
respectivamente, que o período de instabilidade ocorre na faixa compreendida entre
1s e 2s, período onde ocorre a mudança de inclinação.

124
Figura 107 - Resposta a rampa de inclinação igual a 1,9°
(Deslocamento vertical)
Fonte: ELABORADA PELO AUTOR
Figura 108 - Resposta a rampa de inclinação igual a 1,9°
(Ângulo de pitch)
Fonte: ELABORADA PELO AUTOR
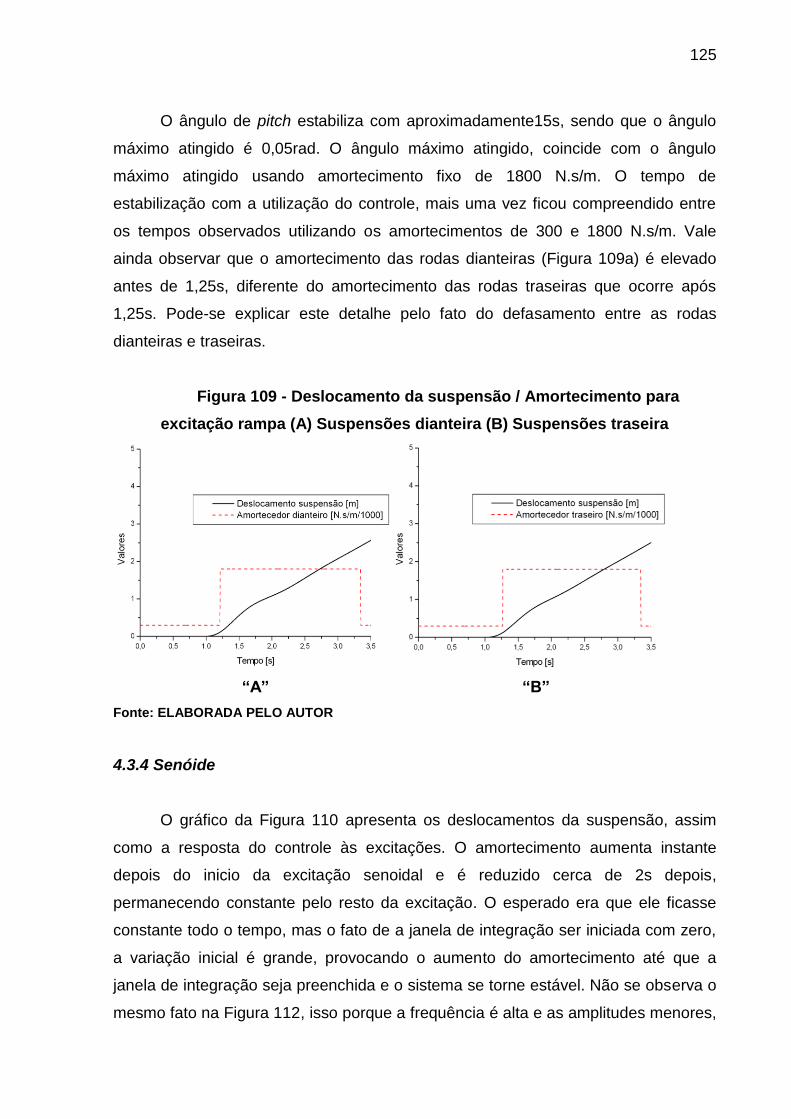
125
O ângulo de pitch estabiliza com aproximadamente15s, sendo que o ângulo
máximo atingido é 0,05rad. O ângulo máximo atingido, coincide com o ângulo
máximo atingido usando amortecimento fixo de 1800 N.s/m. O tempo de
estabilização com a utilização do controle, mais uma vez ficou compreendido entre
os tempos observados utilizando os amortecimentos de 300 e 1800 N.s/m. Vale
ainda observar que o amortecimento das rodas dianteiras (Figura 109a) é elevado
antes de 1,25s, diferente do amortecimento das rodas traseiras que ocorre após
1,25s. Pode-se explicar este detalhe pelo fato do defasamento entre as rodas
dianteiras e traseiras.
Figura 109 - Deslocamento da suspensão / Amortecimento para
excitação rampa (A) Suspensões dianteira (B) Suspensões traseira
“A” “B”
Fonte: ELABORADA PELO AUTOR
4.3.4 Senóide
O gráfico da Figura 110 apresenta os deslocamentos da suspensão, assim
como a resposta do controle às excitações. O amortecimento aumenta instante
depois do inicio da excitação senoidal e é reduzido cerca de 2s depois,
permanecendo constante pelo resto da excitação. O esperado era que ele ficasse
constante todo o tempo, mas o fato de a janela de integração ser iniciada com zero,
a variação inicial é grande, provocando o aumento do amortecimento até que a
janela de integração seja preenchida e o sistema se torne estável. Não se observa o
mesmo fato na Figura 112, isso porque a frequência é alta e as amplitudes menores,
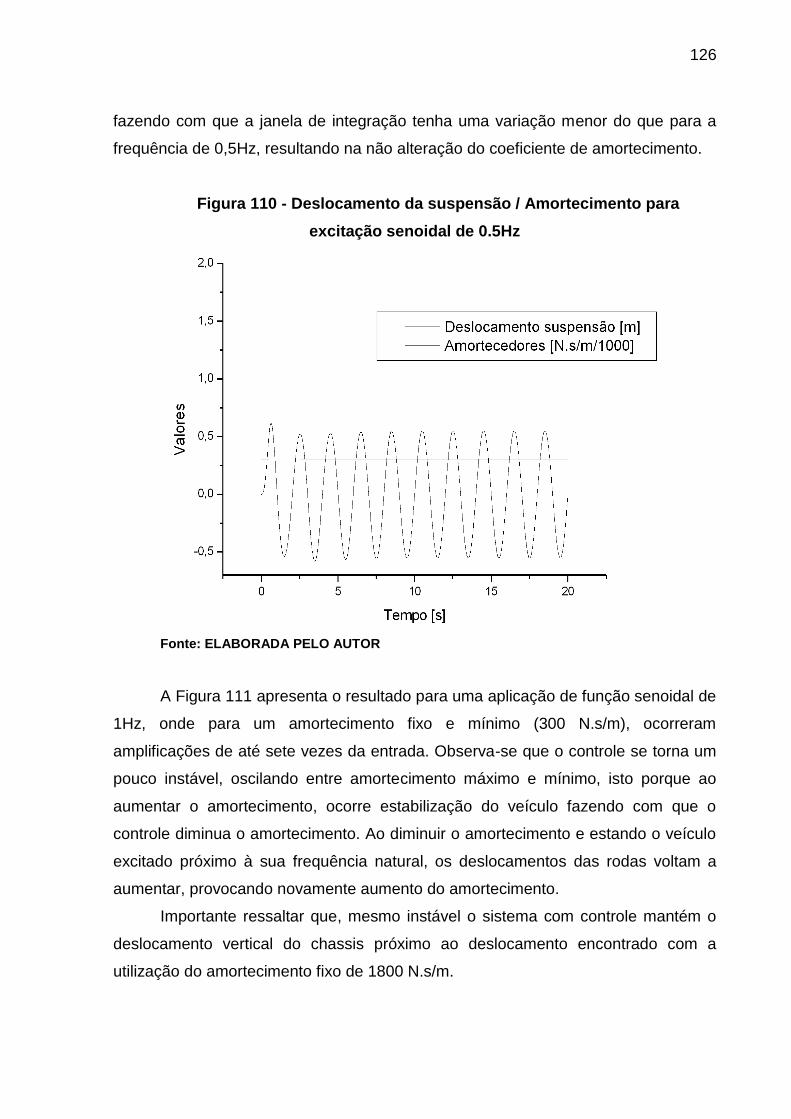
126
fazendo com que a janela de integração tenha uma variação menor do que para a
frequência de 0,5Hz, resultando na não alteração do coeficiente de amortecimento.
Figura 110 - Deslocamento da suspensão / Amortecimento para
excitação senoidal de 0.5Hz
Fonte: ELABORADA PELO AUTOR
A Figura 111 apresenta o resultado para uma aplicação de função senoidal de
1Hz, onde para um amortecimento fixo e mínimo (300 N.s/m), ocorreram
amplificações de até sete vezes da entrada. Observa-se que o controle se torna um
pouco instável, oscilando entre amortecimento máximo e mínimo, isto porque ao
aumentar o amortecimento, ocorre estabilização do veículo fazendo com que o
controle diminua o amortecimento. Ao diminuir o amortecimento e estando o veículo
excitado próximo à sua frequência natural, os deslocamentos das rodas voltam a
aumentar, provocando novamente aumento do amortecimento.
Importante ressaltar que, mesmo instável o sistema com controle mantém o
deslocamento vertical do chassis próximo ao deslocamento encontrado com a
utilização do amortecimento fixo de 1800 N.s/m.

127
Figura 111 – Deslocamento da suspensão / Amortecimento para
excitação senoidal de 1Hz
Fonte: ELABORADA PELO AUTOR
Figura 112 - Deslocamento da suspensão / Amortecimento para
excitação senoidal de 10Hz
Fonte: ELABORADA PELO AUTOR
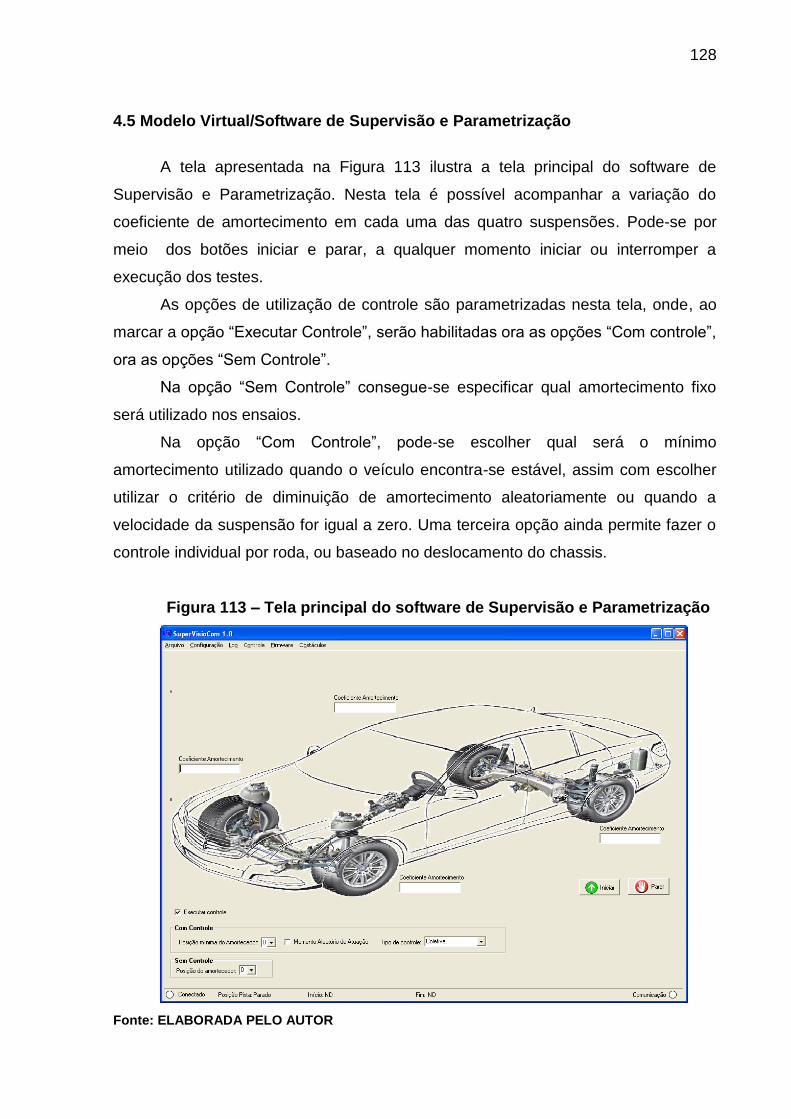
128
4.5 Modelo Virtual/Software de Supervisão e Parametrização
A tela apresentada na Figura 113 ilustra a tela principal do software de
Supervisão e Parametrização. Nesta tela é possível acompanhar a variação do
coeficiente de amortecimento em cada uma das quatro suspensões. Pode-se por
meio dos botões iniciar e parar, a qualquer momento iniciar ou interromper a
execução dos testes.
As opções de utilização de controle são parametrizadas nesta tela, onde, ao
marcar a opção “Executar Controle”, serão habilitadas ora as opções “Com controle”,
ora as opções “Sem Controle”.
Na opção “Sem Controle” consegue-se especificar qual amortecimento fixo
será utilizado nos ensaios.
Na opção “Com Controle”, pode-se escolher qual será o mínimo
amortecimento utilizado quando o veículo encontra-se estável, assim com escolher
utilizar o critério de diminuição de amortecimento aleatoriamente ou quando a
velocidade da suspensão for igual a zero. Uma terceira opção ainda permite fazer o
controle individual por roda, ou baseado no deslocamento do chassis.
Figura 113 – Tela principal do software de Supervisão e Parametrização
Fonte: ELABORADA PELO AUTOR

129
A tela intitulada como “Modelo” apresentada na Figura 114, possibilita
visualizar as variáveis do modelo assim como parametrizá-las. É possível inserir a
tabela de amortecimento em função da posição do amortecedor e marcar a opção
de “Usar defasamento de pista”, que calcula a partir do comprimento do veículo e
sua velocidade, quantos pontos de entrada existem entre as rodas dianteiras e
traseiras.
Figura 114 – Tela de parametrização do modelo
Fonte: ELABORADA PELO AUTOR
Os resultados de RMS do deslocamento, FFT, posições,
amortecimentos utilizados, podem ser visualizados em tempo real e em seguida
exportados para planilhas a partir da tela “Acompanhamento de Resultados”
apresentada na Figura 115.
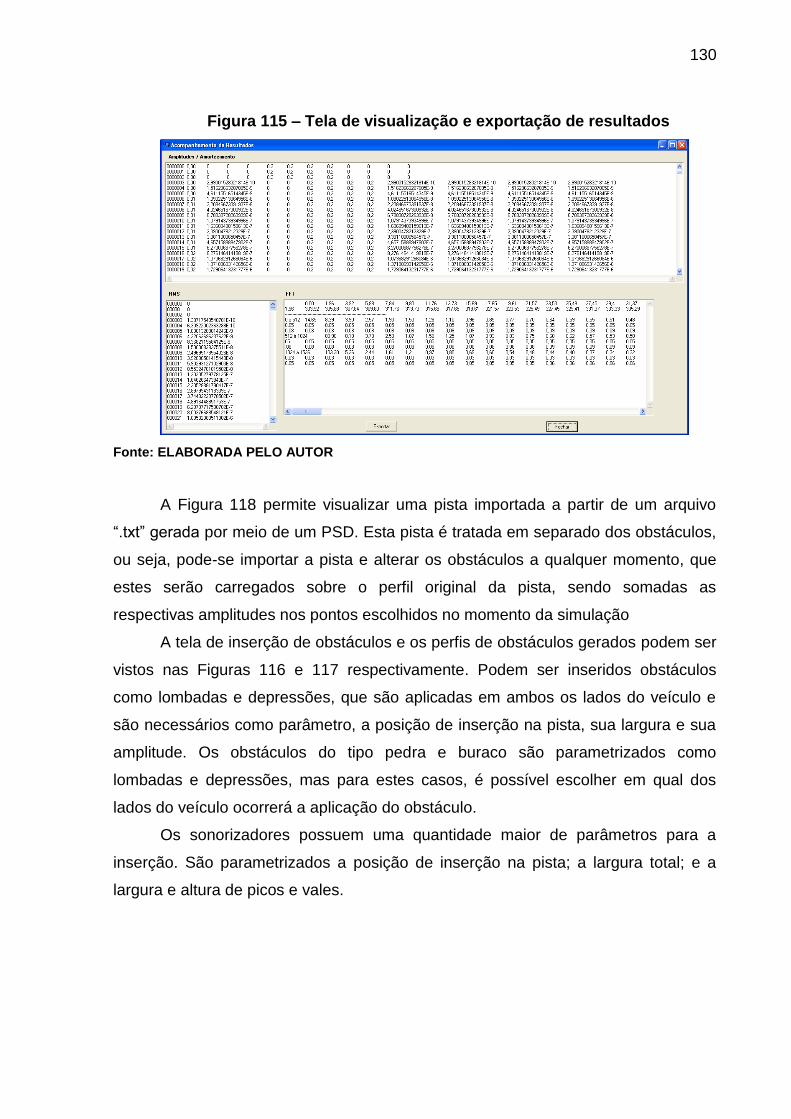
130
Figura 115 – Tela de visualização e exportação de resultados
Fonte: ELABORADA PELO AUTOR
A Figura 118 permite visualizar uma pista importada a partir de um arquivo
“.txt” gerada por meio de um PSD. Esta pista é tratada em separado dos obstáculos,
ou seja, pode-se importar a pista e alterar os obstáculos a qualquer momento, que
estes serão carregados sobre o perfil original da pista, sendo somadas as
respectivas amplitudes nos pontos escolhidos no momento da simulação
A tela de inserção de obstáculos e os perfis de obstáculos gerados podem ser
vistos nas Figuras 116 e 117 respectivamente. Podem ser inseridos obstáculos
como lombadas e depressões, que são aplicadas em ambos os lados do veículo e
são necessários como parâmetro, a posição de inserção na pista, sua largura e sua
amplitude. Os obstáculos do tipo pedra e buraco são parametrizados como
lombadas e depressões, mas para estes casos, é possível escolher em qual dos
lados do veículo ocorrerá a aplicação do obstáculo.
Os sonorizadores possuem uma quantidade maior de parâmetros para a
inserção. São parametrizados a posição de inserção na pista; a largura total; e a
largura e altura de picos e vales.
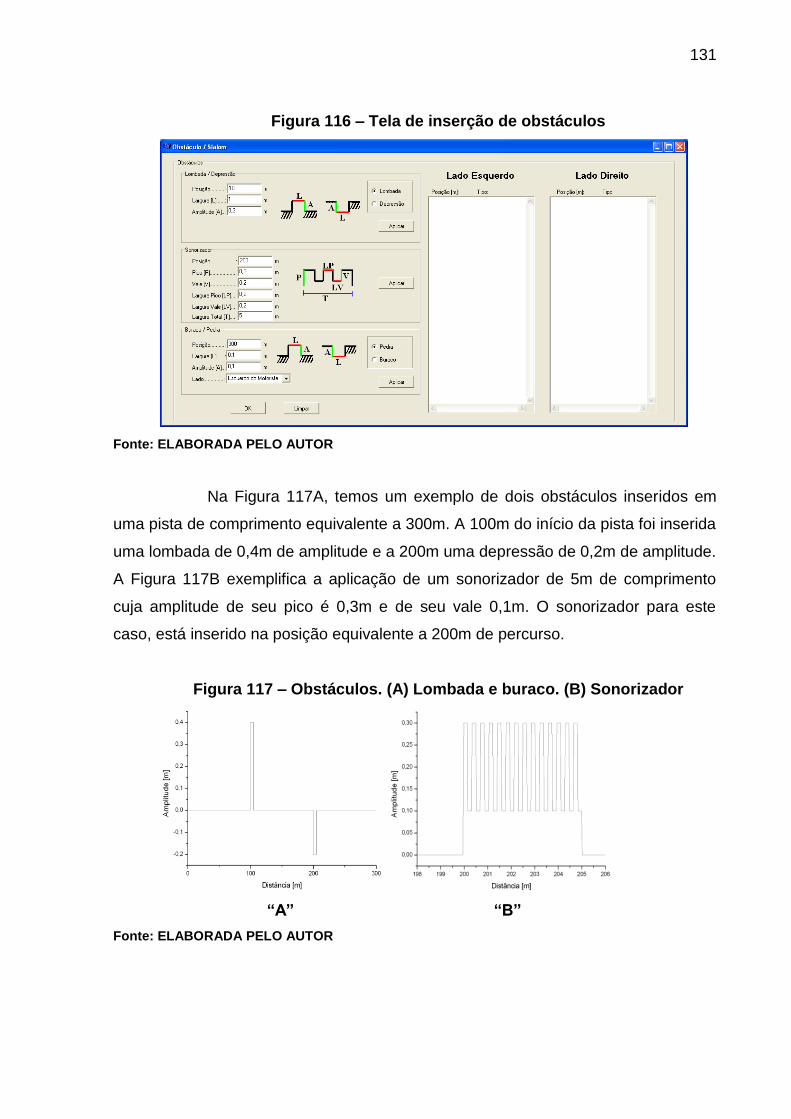
131
Figura 116 – Tela de inserção de obstáculos
Fonte: ELABORADA PELO AUTOR
Na Figura 117A, temos um exemplo de dois obstáculos inseridos em
uma pista de comprimento equivalente a 300m. A 100m do início da pista foi inserida
uma lombada de 0,4m de amplitude e a 200m uma depressão de 0,2m de amplitude.
A Figura 117B exemplifica a aplicação de um sonorizador de 5m de comprimento
cuja amplitude de seu pico é 0,3m e de seu vale 0,1m. O sonorizador para este
caso, está inserido na posição equivalente a 200m de percurso.
Figura 117 – Obstáculos. (A) Lombada e buraco. (B) Sonorizador
“A” “B”
Fonte: ELABORADA PELO AUTOR

132
Figura 118 – Pista de asfalto importada via arquivo “.txt”
Fonte: ELABORADA PELO AUTOR
4.6 Avaliação das Condições de Pista
Para avaliação do controle em condições de pista foi utilizada a pista
apresentada na Figura 118 e as respostas do deslocamento vertical do chassis ao
serem utilizados amortecimentos fixo de 300 e 1800 N.s/m apresentados na Figura
119. Nota-se que os deslocamentos encontrados são bastante parecidos, exceto
pelo trecho compreendido entre as distâncias de 125 e 275m, onde o amortecimento
menor, permitiu o aparecimento de amplitudes maiores.
O controle de amortecimento foi habilitado e uma nova simulação realizada
para a mesma pista. O resultado para os deslocamentos da suspensão, assim como
o amortecimento utilizado em cada trecho podem ser visualizados na Figura 120.

133
Figura 119 – Resposta do deslocamento vertical do veículo ao trafegar
pela pista de asfalto
Fonte: ELABORADA PELO AUTOR
Figura 120 – Atuação do controle sobre o amortecedor / Deslocamento
vertical da suspensão ao trafegar pela pista de asfalto
Fonte: ELABORADA PELO AUTOR
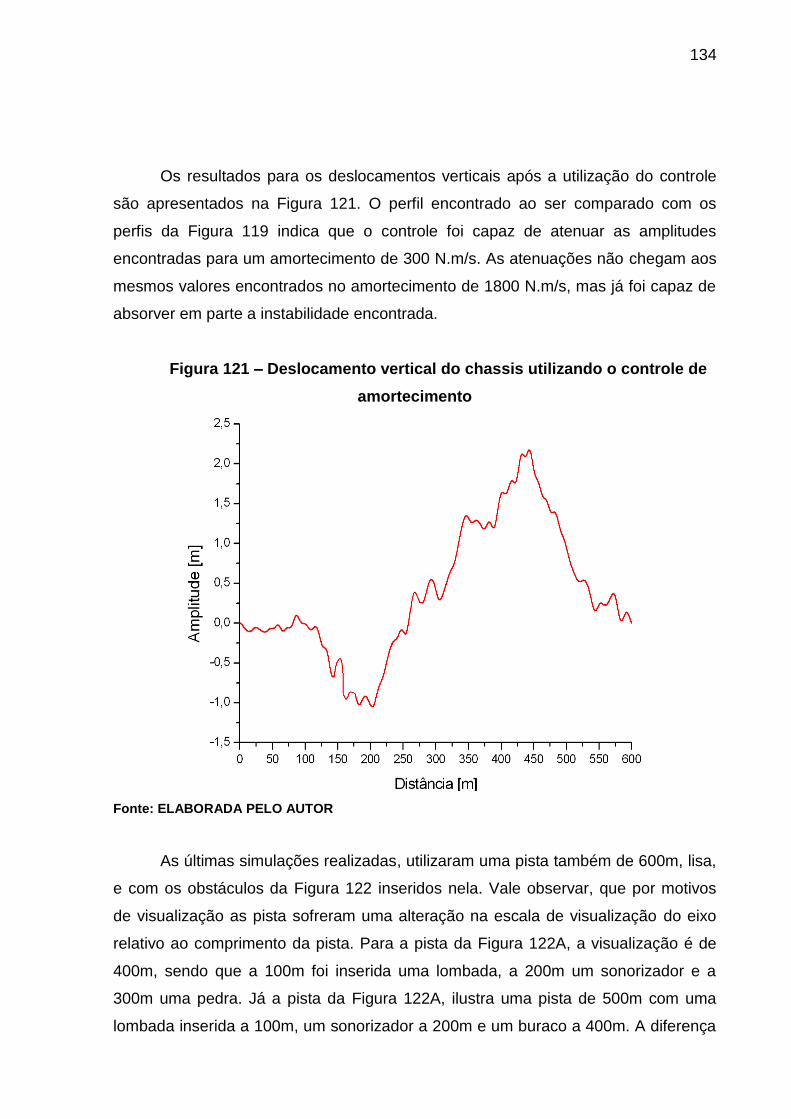
134
Os resultados para os deslocamentos verticais após a utilização do controle
são apresentados na Figura 121. O perfil encontrado ao ser comparado com os
perfis da Figura 119 indica que o controle foi capaz de atenuar as amplitudes
encontradas para um amortecimento de 300 N.m/s. As atenuações não chegam aos
mesmos valores encontrados no amortecimento de 1800 N.m/s, mas já foi capaz de
absorver em parte a instabilidade encontrada.
Figura 121 – Deslocamento vertical do chassis utilizando o controle de
amortecimento
Fonte: ELABORADA PELO AUTOR
As últimas simulações realizadas, utilizaram uma pista também de 600m, lisa,
e com os obstáculos da Figura 122 inseridos nela. Vale observar, que por motivos
de visualização as pista sofreram uma alteração na escala de visualização do eixo
relativo ao comprimento da pista. Para a pista da Figura 122A, a visualização é de
400m, sendo que a 100m foi inserida uma lombada, a 200m um sonorizador e a
300m uma pedra. Já a pista da Figura 122A, ilustra uma pista de 500m com uma
lombada inserida a 100m, um sonorizador a 200m e um buraco a 400m. A diferença

135
entre a pista aplicada do lado do motorista e a pista aplicada do lado do passageiro,
é a inserção de pedra como obstáculo na primeira e um buraco como obstáculo na
segunda.
Figura 122 – (A) Obstáculos aplicados do lado do motorista. (B)
Obstáculos aplicados do lado do passageiro
“A” “B”
Fonte: ELABORADA PELO AUTOR
As Figuras 123 e 124 apresentam, os deslocamentos ocorridos nas
suspensões do lado do motorista e do passageiro gerados a partir da simulação de
uma pista lisa com os obstáculos da Figura 122 inseridos, para amortecimentos fixo
de 300 e 1800 N.s/m respectivamente.

136
Figura 123 – (A) Deslocamento da suspensão do lado do motorista com
C=300. (B) Deslocamento da suspensão do lado do passageiro C=300
“A” “B”
Fonte: ELABORADA PELO AUTOR
Figura 124 – (A) Deslocamento da suspensão do lado do motorista com
C=1800. (B) Deslocamento da suspensão do lado do passageiro C=1800
“A” “B”
Fonte: ELABORADA PELO AUTOR
Os deslocamentos da suspensão assim como a variação de amortecimento
impostos pelo controle, para o lado do motorista e lado do passageiro podem ser
vistos nas Figuras 125 e 126 respectivamente. Nota-se nestas figuras que o tempo
de estabilização da suspensão estão na faixa compreendida entre os tempos de
estabilização encontrados para o máximo e mínimo amortecimento e que ainda os
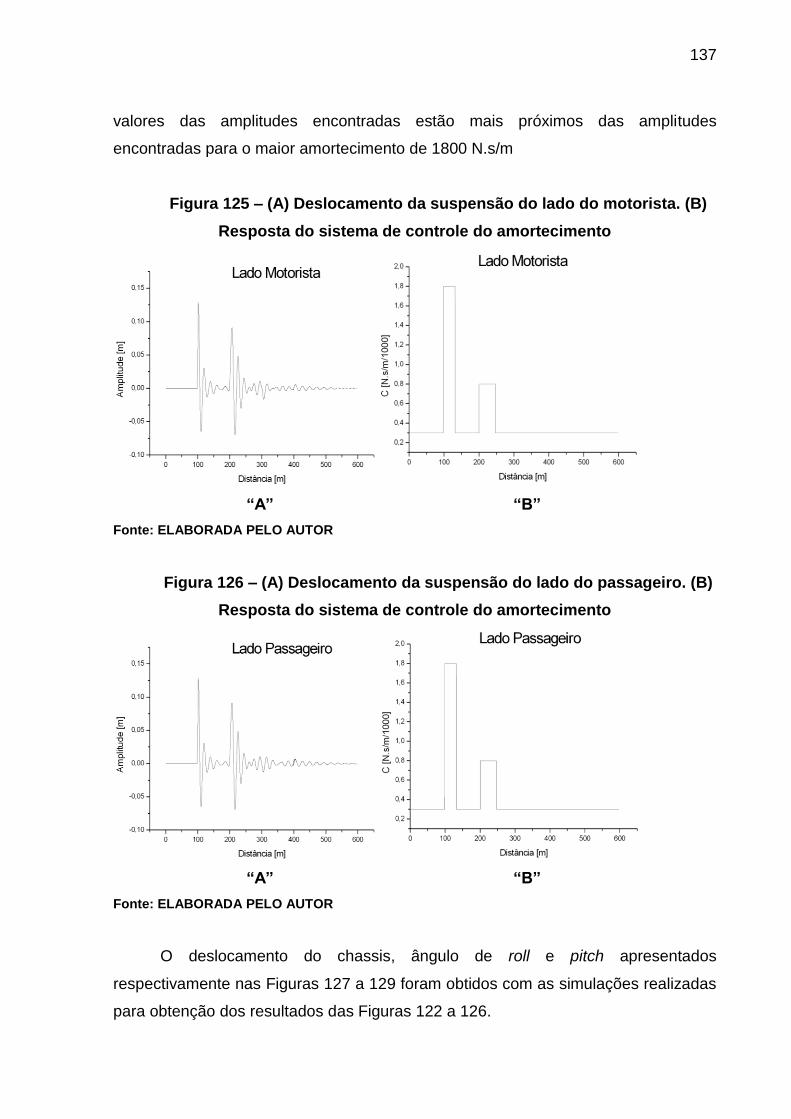
137
valores das amplitudes encontradas estão mais próximos das amplitudes
encontradas para o maior amortecimento de 1800 N.s/m
Figura 125 – (A) Deslocamento da suspensão do lado do motorista. (B)
Resposta do sistema de controle do amortecimento
“A” “B”
Fonte: ELABORADA PELO AUTOR
Figura 126 – (A) Deslocamento da suspensão do lado do passageiro. (B)
Resposta do sistema de controle do amortecimento
“A” “B”
Fonte: ELABORADA PELO AUTOR
O deslocamento do chassis, ângulo de roll e pitch apresentados
respectivamente nas Figuras 127 a 129 foram obtidos com as simulações realizadas
para obtenção dos resultados das Figuras 122 a 126.

138
Na Figura 127 pelos deslocamentos observados, nota-se que os resultados
obtidos com o controle, tiveram amplitudes máximas inferiores quando utilizado
amortecimento de 1800, e tempos de estabilização maiores, mas tempos inferiores
que os tempos ao se utilizar amortecimento de 300. Nota-se ainda que a aplicação
do buraco ocorrido a 400m, foi praticamente todo absorvido pelo controle, que é o
mesmo acontecido com o amortecimento de 300. Para a avaliação da pedra, não foi
possível constatar a mesma absorção da instabilidade gerada, uma vez que o a
instabilidade gerada pelo sonorizador, não chegou a ser totalmente absorvida até a
aplicação da pedra. Aqui é possível notar a vantagem de se trafegar com
amortecimento macio e atuar na estabilidade somente quando necessário, uma vez
que algumas irregularidades da pista serão absorvidas, o que não aconteceria em
carros com amortecedores com grau de amortecimento elevado.
Figura 127 – Deslocamento do chassis. (A) Amortecimento fixo de 300
N.s/m. (B) Amortecimento fixo de 1800 N.s/m. (C) Utilizando o controle de
amortecimento
Fonte: ELABORADA PELO AUTOR
Os ângulos de roll como são apresentados na Figura 128, acontece a partir
da distância igual maior que 300m, isso porque, o acontecimento deste ângulo está

139
ligado a diferentes amplitudes aplicadas nas suas rodas laterais. Como lombada e
sonorizador aplicam estas amplitudes simultaneamente nas rodas paralelas ao eixo
do comprimento do veículo, o ângulo de roll só ocorre com a aplicação da pedra e
do buraco que ocorre em lados distintos.
Figura 128 – Ângulo de roll. (A) Amortecimento fixo de 300 N.s/m. (B)
Amortecimento fixo de 1800 N.s/m. (C) Utilizando o controle de amortecimento
Fonte: ELABORADA PELO AUTOR
Pode-se observar ainda que o controle para este caso apresentou amplitudes
inferiores aos dois casos de amortecimento fixos.
Os ângulos de pitch observados na Figura 129 ocorrem com qualquer
aplicação de obstáculos, isso porque há defasamento entre rodas dianteiras e
traseiras, deste modo, o obstáculo sempre é aplicado no par de rodas dianteiras
primeiro, o que gera um ângulo de pitch.
Nota-se que para este caso, as amplitudes observadas com a utilização do
controle não são tão reduzidas se comparadas com o que se conseguiu reduzir no
ângulo de rolagem, mas também não ocorrem amplificações. O tempo de
estabilização fica próximo ao tempo de estabilização com amortecimento fixo de 300
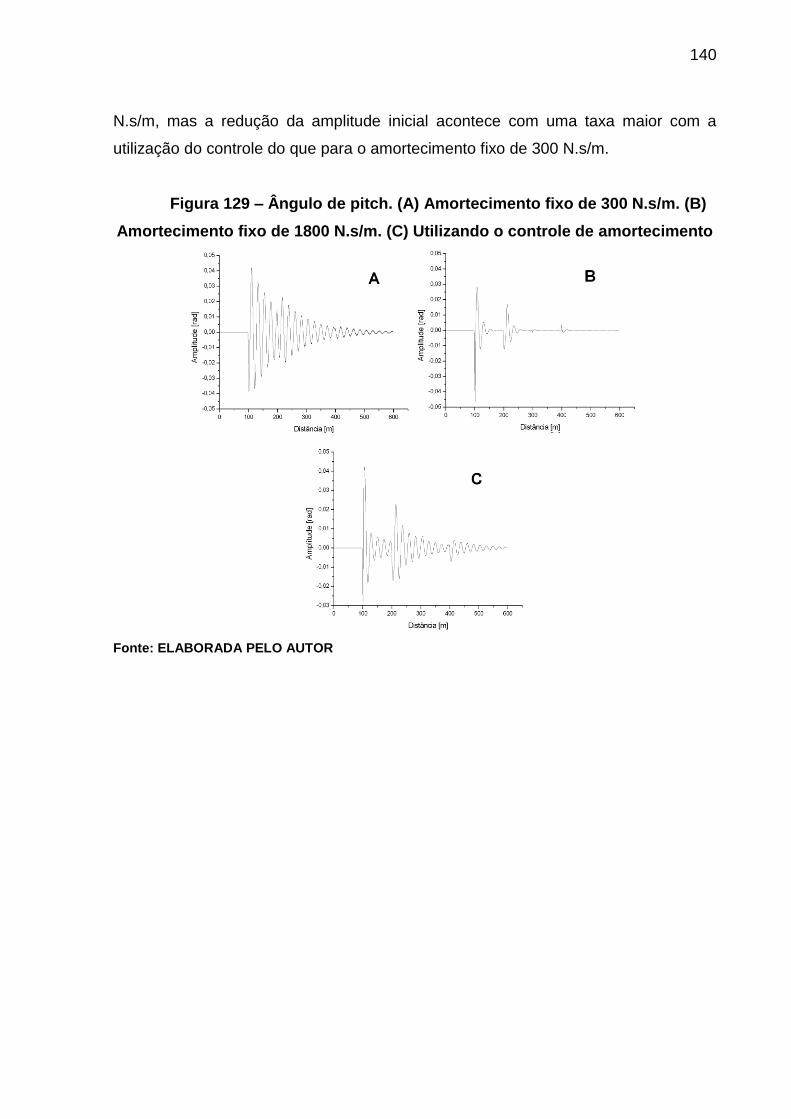
140
N.s/m, mas a redução da amplitude inicial acontece com uma taxa maior com a
utilização do controle do que para o amortecimento fixo de 300 N.s/m.
Figura 129 – Ângulo de pitch. (A) Amortecimento fixo de 300 N.s/m. (B)
Amortecimento fixo de 1800 N.s/m. (C) Utilizando o controle de amortecimento
Fonte: ELABORADA PELO AUTOR

141
4.7 Análise e Discussões de Resultados
O modelo virtual implementado no Software de Supervisão e Parametrização
foi capaz de gerar por meio de entradas de pistas e obstáculos, saídas de níveis
vibracionais para o hardware desenvolvido, permitindo a este tomar decisões de
controle a atuação sobre os amortecedores. Além disso, o software possibilitou
parametrizar o modelo de acordo com os dados reais de um veículo automotor,
disponibilizando em sua tela de resultados, respostas de diversos pontos da
suspensão para posterior análise do sistema como um todo.
O sistema de controle implementado, foi capaz de controlar os amortecedores
através dos níveis vibracionais das quatro rodas obtidos do sistema de Supervisão e
Parametrização conforme pode ser visto nos tópicos 4.4 e 4.6 que apresentaram o
desempenho do controle sobre condições pontuais e de pistas, respectivamente.
O tópico 4.1 apresentou como o amortecedor proposto foi capaz de variar o
coeficiente de amortecimento em até 587% ao ser avaliado pelo experimento
proposto no tópico 3.3 para determinação do coeficiente de amortecimento de
acordo com a abertura utilizada.
O algoritmo de controle baseado na integração das acelerações individuais de
cada uma das rodas independentemente em uma janela de integração, foi capaz de
perceber as perturbações e estabilizações ocorridas e atuar nos amortecedores de
modo a melhorar ora a estabilidade, ora o conforto.
O tópico 4.2 apresentou os tempos de resposta tanto de abertura e
fechamento do amortecedor como tempo de resposta do controle a um estímulo.
Estes tempos de respostas aplicados como delay na variação do amortecimento no
modelo virtual, permitiram ainda sim, que os resultados de estabilização obtidos nos
resultados dos tópicos 4.4 e 4.6 fossem satisfatórios, estando muitas vezes mais
próximo dos resultados obtidos com amortecimento fixo e elevado, do que próximos
aos resultados com amortecimento fixo e baixo.
A boa eficiência do sistema como um todo pode ser vista nos tópicos 4.4 e
4.6, onde o veículo ao permanecer estável, tinha seus amortecedores posicionados
de modo a absorver o máximo de vibrações, aumentando assim o conforto e ao
sofrer perturbações este foi capaz de interferir a tempo nos amortecedores,
minimizando o tempo de estabilização, permitindo uma melhora da dirigibilidade.

142
Um resultado não esperado e que ainda sim pode ser avaliado no sistema, foi
a resposta do sistema à diminuição do amortecimento conforme foi visto no tópico
4.2, onde pode-se concluir que uma diminuição do coeficiente de amortecimento,
deve seguir regras para não causar uma instabilidade no veículo no momento da
redução. O sistema proposto possibilitou que as regras de diminuição de
amortecimento fossem seguidas e analisadas, levando em conta seu tempo de
resposta, permitindo concluir que ainda nestes casos, ele se apresentou eficiente.
Tendo sido levado em consideração o tempo de resposta do sistema,
parâmetros de suspensão e chassis reais de veículos comerciais, sinais de entrada
para o sistema de controle possíveis de serem obtidos com sensores de aceleração,
variação do coeficiente de amortecimento atingível com o amortecedor proposto e
implementação do sistema de controle pode-se concluir que a metodologia proposta
pode ser implementada assim como foi proposta em sua totalidade aos veículos de
modo a maximizar o conforto, estabilizando o veículo quando necessário.
143
5 CONCLUSÕES
O modelo virtual implementado foi capaz de gerar níveis vibracionais para o
sistema de controle de acordo com cada entrada aplicada a ele;
O Software de Supervisão e Parametrização permitiu a parametrização do
modelo virtual e visualização/Exportação dos resultados obtidos;
O protótipo do amortecedor proposto foi capaz de variar em até 587% o
coeficiente de amortecimento;
Os tempos de respostas obtidos foram suficientes para permitir o controle da
suspensão;
O algoritmo baseado nas acelerações individuais de cada roda, foi capaz de
perceber as perturbações e estabilizações da suspensão;
O sistema de controle foi capaz de controlar os amortecedores através de
níveis vibracionais em condições pontuais e de pista;
O sistema se mostrou eficaz, permitindo ao veículo maior conforto e aumento
da estabilidade quando necessário;
A diminuição do amortecimento deve seguir regras para evitar uma
instabilidade no veículo no momento da atuação;
A metodologia proposta pode ser implementada na sua totalidade na
maximização do conforto de um veículo.

144
6 TRABALHOS FUTUROS
Implementar o protótipo em escala real e implantá-lo em um veículo real;
Realizar estudo sobre impactos da alteração do amortecimento em diferentes
momentos;
Instrumentar um veículo com os dados necessários para o sistema de
controle e avaliá-lo sobre um trafego de pista real;
Avaliar a influência da rugosidade e temperatura no coeficiente de
amortecimento.
145
REFERÊNCIAS
AHMADIAN, M.; PARE, C. A Quarter-Car Experimental Analysis of Alternative Semiactive Control Methods. Journal of Intelligent Material Systems and Structures, Virginia, v. 11, n. 8, p.604-612, Aug. 2000.
ALMEIDA, A. C. R. Simulação e Controle de um Sistema de Suspensão Simplificado. 2002. Dissertação (Mestrado) - Universidade Federal do Rio Grande do Sul, Programa de Pós-Graduação em Matemática Aplicada, Porto Alegre.
BAZANELLA, S.; SILVA, J. M. G. Sistemas de Controle: princípios e métodos de projeto. 1. ed. Rio Grande do Sul: UFRGS Editora, 2005, 299p.
BOUAZARA, M.; RICHARD, M. J.; RAKHEJA, S. Safety and comfort analysis of a 3D vehicle model with optimal non-linear active seat suspension. Journal of Terramechanics, S.I., v. 43, n. 2, p.97-118, Oct. 2006.
CANALE, M.; MILANESE, M.; NOVARA, C. Semi-Active Suspension Control Using “Fast” Model-Predictive Techniques. IEE Transactions of control systems technology, S.l., v. 14, n. 6, p.1034-1046, Nov. 2006.
CHALANSI, R. M. Ride performance potential for 3d vehicle models. Proceedings of the American Control conference, Arizona, v. 2, n. 1, p.1534-1541, 1991.
DAVIS, P. et al. Adaptable Passive Viscous Damper – An Adaptable D-Strut, SPIE North American Conference, Orlando, v. 3, n. 47, Feb. 1994.
DIXON, J. C. Tires, Suspension and Handling. 2. ed., Londres: Cambridge University Press, 1996, 621p.
DOYLE, J.C.; FRANCIS, B. A.; TANNENBAUM, A. R. Feedback Control Theory. Nova York: Dover Publications, 1992. 214p. ELMADANY, M.; BASSAM, B. A.; FAYED, A. Preview Control f Slow-active Suspension Systems. Journal of Vibration and Control, S.l., v. 17, n. 2, p. 245-258, Feb. 2011.
ELS, P. S. The applicability of ride comfort standards to off-road vehicles. Journal of Terramechanics, S.l., v. 42, n. 1, p.47-64, Oct. 2005.
ELS, P. S. et al. The ride comfort vs. handling compromise for off-road vehicles. Journal of Terramechanics, S.l., v. 44, n.4, p.303-317, Oct. 2007.
EYRES, R. D.; CHAMPNEYS, A. R.; LIEVEN, A. J. Modelling and Dynamic Response of a Damper with Relief Valve. Nonlinear Dynamics, S.l., v. 40, n. 2, p.119-147, Sep. 2005.
146
FERREIRA, H. T. Determinação das frequências naturais e modos de vibrar de um veículo de dois eixos através de um programa computacional em Matlab-Simulink, 2003. Dissertação (Mestrado) – Departamento de Engenharia de Materiais, Aeronáutica e Automobilística, Escola de Engenharia de São Carlos, São Carlos.
FISCHER, D.; ISERMANN, R. Mechatronic semi-active and active vehicle suspensions. Control and Engineering Practice, S.l., v.12, n. 11, p.1353-1367, Aug. 2004.
GAO,H.; SUN, W.; Kaynak, O. Vibration Suppression of Vehicle Active Suspension Systems in Finite Frequency Domian. In: 48th IEEE CONFERENCE ON DECISION AND CONTROL AND 28T CHINESE CONTROL CONFERENCE, 2009, Anais… Shanghai: P.R. China, Dec. 2009. v. 1, p.5170-5175.
GENTA, G. Motor Vehicle Dynamics. 1. ed. London: World Scientific Publishing, 1997. 539p.
GILIOMEE, C.L.; ELS P. S. Semi-active hydropneumatic spring and damper system. Journal of Terramechanics. S.l., v. 53, n. 2 , p.109-117, Nov. 1998. GILLESPIE, T. D. Fundamentals of Vehicle Dynamics. Warrendalle: Society of Automotive Engineers. 1992. 495p. GOODALL, R. M., KORTÜM, W. Mechatronic developments for railway vehicles of the future. Control Engineering Practice. S.l., v.10, n. 8, p.887-898, Jan. 2002. GROOVER, M. P. Automação Industrial e Sistemas de Manufatura. 3. ed. São Paulo: Pearson Education do Brasil. 2010. 581p.
HARTY, D. A review of dynamic intervention technologies and a method to choose between them. In: VEHICLE DYNAMICS EXPO 2005, Open technology forum, 2005, Anais…, Stuttgart : Stuttgart Messe, May 31-June 2, 2005. HOLDMANN, P.; HOLLE, M. Possibilities to improve the ride and handling performance of delivery trucks by modern mechatronic systems. JSAE. S.l., v. 20, n. 4, p.505-510, Oct. 1999.
HROVAT, D. Survey of Advanced Suspension Developments and Related Optimal Control Applications. Automatica, S.l., v. 33, n. 10, p.1781-1817, 1997. INMAN, D., J. Engineering Vibration. 3. ed. Prentice Hall,1994, 669p
JIAO, S. et al. Shock wave characteristics of a hydraulic damper for shock test machine. Mechanical Systems and Signal Processing. S.l., v. 24, n. 5, p.1570-1578, Jul. 2010.
KARNOPP, D. C.; COSBY, M. J. System for controlling the transmission energy between spaced members, U.S. Patent, 3.807.678, 1974.

147
KIM, H., J.; YANG, H. S.; PARK, Y., P. Improving the vehicle performance with active suspension using road-sensing algorithm. Computers and Structures, S.l., v. 80. n. 18-19, p.1569-1577, Jul. 2002.
KITCHING, K. J. Semi-Active Damping of Heavy Vehicles. 2000. Tese (Doutorado) - Cambridge University (RU), Cambridge University Engineering Department.
KOLICH, M. Automobile seat comfort: occupant preferences vs. anthropometric accommodation. Applied Ergonomics, S.l., v. 34, n. 2, p.177-184, Mar. 2003.
KYUNG, G.; NUSSBAUM, M. A.; BABSKI-REEVES, K. Driver sitting comfort and discomfort (part I): Use of subjective ratings in discriminating car seats and correspondence among ratings. International Journal of Industrial Ergonomics, S.l., v. 38, n. 5-6, p.526-538, May-Jun, 2008.
KYUNG, G.; NUSSBAUM, M. A. Driver sitting comfort and discomfort (part II): Relations and prediction from interface pressure. International Journal of Industrial Ergonomics, S.l., v. 38, n. 5-6, p.526-538, May-Jun, 2008. LIU, D., CHEN H., JIANG R. Study of Ride Comfort of Active Suspension Based on Model Reference Neural Network Control System. Sixth International Conference on Natural Computation, S.l., v. 4, n. 10, p.1860-1864, Aug. 2010.
LOUREIRO, J., Alves, L. Instrumentação. Controle e Automação de Processos. Rio de Janeiro: LTC Editora., 2005. 270p.
NAUDÉ, A. F.; SYNMAN, J. A. Optimisation of road vehicle passive suspension systems. Part 1. Optimisation algorithm and vehicle model. Applied Mathematical Modelling, S.l., v. 27,n. 4, p.249-261, Apr. 2003.
NAUDÉ, A. F., SYNMAN, J. A. Optimisation of road vehicle passive suspension systems. Part 2. Qualification and case study, Applied Mathematical Modelling, S.l., v. 27, n. 4, p.263-274, Apr. 2003.
NISE, N. S. Engenharia de Sistemas de Controle. 3. ed. Rio de Janeiro: LTC Editora, 2008. 695p.
OGATA, K. Engenharia de Controle Moderno. Rio de Janeiro: Editora Prentice/Hall do Brasil, 1982. 929p.
PATRíCIO, L. F. S. Desenvolvimento Matemático e Implementação Numérica de Modelo Tridimensional para Determinação das Respostas Dinâmicas de um Veículo Automotor. 2005. Dissertação (Mestrado) - Pontifícia Universidade Católica de Minas Gerais, Programa de Pós-Graduação em Engenharia Mecânica, Belo Horizonte.
PAZOS, F. Automação de Sistemas e Robótica. Rio de Janeiro: Axcel Books do Brasil Editora, 2002. 377p.

148
POLLONE, G. Il Veicolo. 3. ed. Torino: Libreria Editrice Universitaria Levrotto & Bella. 1970, 171p.
POUSSOT-VASSAL, C. et al. A new semi-active suspension control strategy through LPV technique. Control Engineering Practice, S.l., v. 16, n. 12, p.1519-1534, Dec. 2008.
RÊGO, Tarcísio Flávio Umbelino. Desenvolvimento de um Sistema Multicanal de Aquisição de Dados em Tempo Real para Aplicações no Setor Automotivo. 2007. Dissertação (Mestrado) - Pontifícia Universidade Católica de Minas Gerais, Programa de Pós-Graduação em Engenharia Mecânica, Belo Horizonte.
REIMPELL, J.; STOLL, H. The Automotive Chassis: Engineering Principles. Warrendalle : Society of Automotive Engineers. 1996. 410p.
SANKARANARAYANAN, V. et al. Semiactive Suspension Control of a Light Commercial Vehicle. IEEE/ASME Transactions on Mechatronics, S.l., v. 13, n. 5, p. 598-604, Oct. 2008.
SATURNINO, Leonardo J. M. Desenvolvimento de ferramentas para definição, análise e avaliação de desempenho de veículos automotivos. 2004. Dissertação (Mestrado) – Pontifícia Universidade Católica de Minas Gerais, Programa de Pós-Graduação em Mecânica, Minas Gerais.
SAVARESI, S. M., A. Single-Sensor Control Strategy for Semi-Active Suspensions. IEE Transsactions on Controle Systems Technology, S.l., v. 17, n. 1, p.143-152, Jan. 2009.
SPELTA, C. et al. A novel Control strategy for Semi-Active suspensions with variable damping and stiffness. In: 2010 AMERICAN CONTROL CONFERENCE, 2010, Baltimore. Anais…, 2010.
SUN, W.; GAO, H.; KAYNAK, O. Finite Frequency H Control for Vehicle Active
Suspension Systems. IEE Transsactions on Controle Systems Technology, S.l., v. 19, n. 2, p. 530-537, Mar. 2011.
SUN, W. et al. Active Suspension Control with frequency band constraints and actuator input delay. IEE transactions on industrial eletronics, S.l., v. 59, n. 1, p. 530-537, Jan. 2012.
SWEVERS, J. et al. A model-free control structure for the on-line turning of the semi-active suspension of a passenger car, Mechanical Systems and Signal Processing. S.l., v. 21, n. 3, p. 1422-1436, Apr. 2007. TEIXEIRA, R. L.; LÉPORE, F. P.; RIBEIRO, J.F. Comportamento Dinâmico de um Amortecedor Ativo. In: SIMPÓSIO DO PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA, 2004, Uberlândia. Anais... Uberlândia: Universidade Federal de Uberlândia, 2004.

149
TEIXEIRA, R. L. Projeto. Construção e Caracterização de um Amortecedor Ativo Controlado por Atuador Piezoelétrico. 2007. Tese (Doutorado) – Universidade Federal de Uberlândia, Programa de Pós-Graduação em Engenharia Mecânica, Uberlândia.
VILELA, D. Aplicação de Métodos Numéricos de Otimização ao Problema Conjunto da Dirigibilidade e Conforto Veicular. 2010. Tese (Doutorado) – Universidade de São Paulo, Departamento de Engenharia Mecatrônica e Sistemas Mecânicos. WENLIN, W.; XIANGJIE, Y.; GAOXIN, X. A Changeable Damping Strategy for the Sky-hook Control of a Rail Vehicle Semi-active Hydraulic Damper with Parallel Orifices. In: INTERNATIONAL CONFERENCE ON MEASURING TECHNOLOGY AND MECHATRONICS AUTOMATION, 2010, Changsha City. Measuring technology and mechatronics automation. Changsha City: ICMTMA, 2010. YOUN, I.; HAC, A. Semi-active suspensions with adaptive capability, Journal of Sound and Vibration, S.l., v. 180, n. 3, p. 475-492, 1995.

150
APÊNDICE A – DESENHO CONSTRUTIVO DO AMORTECEDOR