motores_inducao_v_1
7
A máquina de indução é uma máquina de dupla excitação, na qual uma tensão alternada CA é aplicada a ambos os enrolamentos, ao do estator (armadura) e ao rotor. A tensão aplicada ao enrolamento da armadura é uma tensão de excitação de freqüência (normalmente) constante e de potencial também (normalmente) constante, suprida por um barramento polifásico ou monofásico. A tensão aplicada ao rotor é uma tensão induzida de freqüência e potencial variáveis, produzida como conseqüência da velocidade do rotor com relação à velocidade síncrona do campo girante. O motor de indução de gaiola de esquilo é o mais simples no aspecto construtivo, o que o isenta de grandes manutenções e por esta razão é o tipo de motor mais utilizado na indústria. Sua utilização é recomendável para potências superiores a 2 kW, abaixo é aconselhável o uso dos motores monofásicos, devido ao seu custo. O motor de indução possui partida mais fácil e menor ruído quando em operação. No entanto, apesar de sua simplicidade construtiva, sob o ponto de vista de operação e trabalho, a teoria de sua operação é sofisticada. O núcleo do rotor de um motor de indução é um cilindro de aço laminado, no qual condutores de cobre ou de alumínio fundido são fundidos ou enrolados paralelamente ao eixo em ranhuras ou orifícios existentes no núcleo. Os condutores não precisam ser isolados do núcleo, porque as correntes induzidas no rotor seguem o caminho de menor resistência, ou seja, os condutores de cobre ou de alumínio fundido do enrolamento do rotor. No rotor gaiola de esquilo, os condutores do rotor estão curto-circuitados em cada terminal por anéis terminais contínuos; daí o nome “gaiola de esquilo”. Nos rotores maiores, os anéis terminais são soldados aos condutores, em vez de serem moldados na construção do rotor. As barras do rotor tipo gaiola de esquilo nem sempre são paralelas ao eixo do rotor, mas podem ser deslocadas ou colocadas segundo um pequeno ângulo em relação a ele, para produzir um torque mais uniforme e para reduzir o zumbido magnético durante a operação do motor. Motores de rotor bobinado são motores nos quais os condutores de cobre são colocados nas diversas ranhuras, usualmente isolados do núcleo de ferro, e são ligados em delta nas máquinas trifásicas. Cada terminal do enrolamento é levado a anéis coletores que são isolados do eixo do rotor. Usualmente um resistor trifásico equilibrado variável é ligado aos anéis coletores através das escovas como meio de variar a resistência total do rotor por fase. Devido ao seu elevado custo inicial e maior custo de manutenção, os motores de rotor bobinado são usados apenas quando: (1) Necessita-se elevado torque de partida. (2) Deseja-se o controle da velocidade. Um campo magnético girante e de amplitude constante, girando à velocidade síncrona (ns = 120·f/p) pode ser produzido por qualquer grupo polifásico de enrolamentos deslocados no espaço da armadura, se as corrente que circulam através dos enrolamentos também estão defasadas no tempo. Por exemplo, se um enrolamento bifásico estiver disposto fisicamente no estator com um deslocamento de 90º, será
-
Upload
jonathan-de-oliveira -
Category
Documents
-
view
62 -
download
0
Transcript of motores_inducao_v_1

5/10/2018 motores_inducao_v_1 - slidepdf.com
http://slidepdf.com/reader/full/motoresinducaov1 1/7
1
Motores de Indução
A máquina de indução é uma máquina de dupla excitação, na qual uma tensão alternadaCA é aplicada a ambos os enrolamentos, ao do estator (armadura) e ao rotor. A tensão
aplicada ao enrolamento da armadura é uma tensão de excitação de freqüência(normalmente) constante e de potencial também (normalmente) constante, suprida porum barramento polifásico ou monofásico. A tensão aplicada ao rotor é uma tensãoinduzida de freqüência e potencial variáveis, produzida como conseqüência davelocidade do rotor com relação à velocidade síncrona do campo girante.O motor de indução de gaiola de esquilo é o mais simples no aspecto construtivo, o queo isenta de grandes manutenções e por esta razão é o tipo de motor mais utilizado naindústria. Sua utilização é recomendável para potências superiores a 2 kW, abaixo éaconselhável o uso dos motores monofásicos, devido ao seu custo. O motor de induçãopossui partida mais fácil e menor ruído quando em operação.No entanto, apesar de sua simplicidade construtiva, sob o ponto de vista de operação e
trabalho, a teoria de sua operação é sofisticada.
Construção
O núcleo do rotor de um motor de indução é um cilindro de aço laminado, no qualcondutores de cobre ou de alumínio fundido são fundidos ou enrolados paralelamenteao eixo em ranhuras ou orifícios existentes no núcleo. Os condutores não precisam serisolados do núcleo, porque as correntes induzidas no rotor seguem o caminho de menorresistência, ou seja, os condutores de cobre ou de alumínio fundido do enrolamento do
rotor.No rotor gaiola de esquilo, os condutores do rotor estão curto-circuitados em cadaterminal por anéis terminais contínuos; daí o nome “gaiola de esquilo”. Nos rotoresmaiores, os anéis terminais são soldados aos condutores, em vez de serem moldados naconstrução do rotor. As barras do rotor tipo gaiola de esquilo nem sempre são paralelasao eixo do rotor, mas podem ser deslocadas ou colocadas segundo um pequeno ânguloem relação a ele, para produzir um torque mais uniforme e para reduzir o zumbidomagnético durante a operação do motor.Motores de rotor bobinado são motores nos quais os condutores de cobre são colocadosnas diversas ranhuras, usualmente isolados do núcleo de ferro, e são ligados em deltanas máquinas trifásicas. Cada terminal do enrolamento é levado a anéis coletores que
são isolados do eixo do rotor. Usualmente um resistor trifásico equilibrado variável éligado aos anéis coletores através das escovas como meio de variar a resistência total dorotor por fase. Devido ao seu elevado custo inicial e maior custo de manutenção, osmotores de rotor bobinado são usados apenas quando:(1) Necessita-se elevado torque de partida.(2) Deseja-se o controle da velocidade.
Produção de um campo magnético girante
Um campo magnético girante e de amplitude constante, girando à velocidade síncrona(ns = 120·f/p) pode ser produzido por qualquer grupo polifásico de enrolamentosdeslocados no espaço da armadura, se as corrente que circulam através dosenrolamentos também estão defasadas no tempo. Por exemplo, se um enrolamentobifásico estiver disposto fisicamente no estator com um deslocamento de 90º, será

5/10/2018 motores_inducao_v_1 - slidepdf.com
http://slidepdf.com/reader/full/motoresinducaov1 2/7
2
produzido um campo girante constante desde que as correntes das fases também estejamdeslocadas no tempo. Todas as máquinas de indução trifásicas, portanto, a fim deproduzirem um campo magnético de amplitude constante e que gire à velocidadesíncrona, necessitam de três enrolamentos individuais e idênticos, deslocados no estatorde 120º elétricos e pelos quais circulem correntes defasadas também de 120º no tempo,
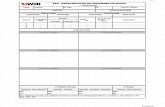
ou na fase. A Figura 1-a mostra o diagrama fasorial das correntes que circulam naarmadura da máquina com uma seqüência de fases ABCABCA. Na Figura 1-bapresenta as variações senoidais de cada corrente por ciclo. A Figura 1-c mostra,esquematicamente, o deslocamento espacial de um enrolamento trifásico. Na verdade,os condutores de cada fase ficam distribuídos uniformemente através da armadura doestator.
Figura 1 – Produção de um campo magnético girante constante à velocidade síncrona.
Cada grupo de fase na Figura 1-c consiste de 12 condutores (ou 6 bobinas) por fase, nos
quais as extremidades finais de bobina de cada fase, FA, FB e FC, estão ligadas a umponto comum. As suas extremidades iniciais, SA, SB e SC, estão ligados à alimentaçãode tensão trifásica.No instante t1, visto na Figura 1-b, a fase A está num valor máximo num determinadosentido, enquanto as correntes nas bobinas das fases B e C alcançam exatamente 0,707

5/10/2018 motores_inducao_v_1 - slidepdf.com
http://slidepdf.com/reader/full/motoresinducaov1 3/7
3
do seu valor máximo no sentido oposto. Os fluxos produzidos por estes condutores nastrês fases estão representados vetorialmente na Figura 1-d e seu sentido é determinadopela regra da mão direita. Um fluxo resultante ΦR é produzido pela soma vetorial dosfluxosΦA, ΦB eΦC, produzidos por cada fase.O mesmo raciocínio se aplica ao instante t2, quando a corrente na fase B está invertida evale 0,707 ficando seu sentido igual ao da fase A (que decresceu para 0,707 de seu valormáximo). Ainda no instante t2, a fase C continua invertida e está no seu valor máximo.O fluxo resultante no instante t2 tem o mesmo valor do instante t1 e pode ser visto naFigura 1-e. Note que no instante t2, 60º elétricos mais tarde que o instante t1, o fluxoresultante girou 60º, mas permaneceu com seu valor constante.Nos instantes t1 e t2, pode-se ver que o estator pode ser tratado como um solenóide noqual, todo condutor de um lado de ΦR carrega corrente entrando no estator, e todocondutor que se localiza do outro lado tem corrente saindo do estator. Assim, noinstante t3 (Figura 1-f), o fluxo resultante terá um sentido horizontal da direita para aesquerda, entrando no estator num pólo S do lado esquerdo e deixando o estator numpólo N à esquerda. Este mesmo raciocínio se emprega para os instantes t 4, t5 e t6 e o
resultado pode ser observado nas Figura 1-g, h e i.Concluí-se que um único campo magnético girante e constante é produzido por umenrolamento trifásico localizado no estator e que o deslocamento no espaço deste campomagnético girante, corresponde exatamente ao deslocamento temporal das correntes, nafreqüência da fonte de alimentação.O enrolamento da Figura 1-c produziu dois pólos e utilizou 6 ranhuras para umenrolamento trifásico, ou seja, uma ranhura para cada pólo por fase. A expressão aseguir auxilia na determinação do número de pólos:
= 2 ∗
Sendo:P – número de pólosn – número de ranhuras por pólo por fase.
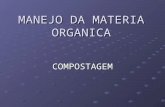
Agora, se fosse utilizado um estator que tenha duas ranhuras por pólo e por fase e se asbobinas para uma mesma fase estivessem fisicamente defasadas de 90º, como visto naFigura 2-a, as correntes resultantes produzirão um campo magnético girantes de quatropólos. Igualmente, um estator possuindo três ranhuras por pólo e por fase (Figura 2-b)produzirá um campo magnético girante de seis pólos e assim por diante.
Figura 2 – Campos girantes de 4 e 6 pólos.

5/10/2018 motores_inducao_v_1 - slidepdf.com
http://slidepdf.com/reader/full/motoresinducaov1 4/7
4
Velocidade do campo magnético girante
Desde que o período das variações senoidais de corrente, visto na Figura 1-b é o mesmonos condutores, a velocidade do campo magnético girante varia diretamente com a
freqüência, mas inversamente com o número de pólos, e é dada pela relação:
=120 ∙
Onde:nS = velocidade síncrona do campo girante, em rpm.
f = freqüência da corrente, em Hz,P = número de pólos por fase.
Desta forma, a velocidade do campo girante da Figura 1 na freqüência de 60 Hz é de3600 rpm. Da mesma maneira, a velocidade do campo girante visto na Figura 2-a é de1800 rpm e na Figura 2-c é de 1200 rpm.
Princípio de funcionamento do motor de indução
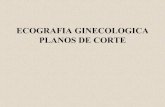
Utilizando o dispositivo mostrado na Figura 3-a onde um imã permanente é suspensopor um fio sobre um disco de alumínio ou cobre pivotado num mancal de apoio sobre
uma placa fixa de ferro. O campo do imã permanente completa-se através da placa deferro.O pivô deve ter tão pouco atrito quanto possível e o imã permanente deve ter suficientedensidade de fluxo. Conforme o imã gira no fio, o disco abaixo dele girará com ele,independente do sentido de rotação do imã. O disco segue o movimento do imã (Figura3-b), devido às correntes parasitas induzidas que aparecem devido ao movimentorelativo do disco em relação ao campo magnético. Pela lei de Lenz, o sentido da tensãoinduzida (e das conseqüentes correntes parasitas) produz um campo que tende a opor-seà força, ou seja, ao movimento que produziu a tensão induzida.
Figura 3 – Princípio do motor de indução.
As correntes parasitas induzidas tendem a produzir um pólo unitário S no disco numponto situado sob o pólo girante N do imã, e um pólo unitário N no disco sob o pólogirante S do imã. Enquanto o imã continua seu movimento, portanto, continuará a

5/10/2018 motores_inducao_v_1 - slidepdf.com
http://slidepdf.com/reader/full/motoresinducaov1 5/7
5
produzir correntes parasitas e pólos de polaridades opostas no disco sob ele. O disco,assim, gira no mesmo sentido que o imã, mas deve girar a uma velocidade menor que ado imã. Se o disco fosse acionado à mesma velocidade do imã, não haveria movimentorelativo entre o condutor e o campo magnético, e não se produziriam correntes parasitasno disco. O disco deixaria de se movimentar e consequentemente não seria produzido
torque. Desta forma o disco deve “escorregar” em velocidade a fim de que se produzatorque. Isso resulta numa diferença de velocidades produzidas entre (1) a velocidadesíncrona do campo magnético girante e (2) a velocidade de “escorregamento” na qualgira o disco como resultado do torque produzido por interação entre seu campo e ocampo magnético girante. Esta diferença na velocidade entre (1) e (2) é chamada develocidade de escorregamento e é normalmente expressa como uma percentagem davelocidade síncrona.
=
í
=í −
í
= −
× 100
Ou
= 1 − → =120 ∙
1 −
Onde:s escorregamento percentualnR velocidade do rotor, em RPMnS velocidade síncrona do campo magnético girante, em rpm
FEM induzida e torque com o rotor parado
Estando o rotor do motor de indução bloqueado ou em repouso, a freqüência da feminduzida no rotor é igual à freqüência do campo magnético girante. Por outro lado, se orotor fosse capaz de girar à mesma velocidade do campo magnético girante, não haveriatensão induzida nos condutores do rotor, e a freqüência de alternação do rotor seria zero.A freqüência das tensões induzidas no rotor, assim varia inversamente com a velocidadedo rotor desde um máximo em repouso, à freqüência zero na velocidade síncrona. Já foivisto que o escorregamento também varia desde um máximo para o rotor em repousoaté zero a velocidade síncrona. A freqüência do rotor pode ser expressa como umafunção da freqüência do estator e do escorregamento.
= ×
Onde:f r = freqüência da tensão senoidal e das correntes induzidas no circuito do rotor a um
dado escorregamento, em Hz.s = escorregamento.

5/10/2018 motores_inducao_v_1 - slidepdf.com
http://slidepdf.com/reader/full/motoresinducaov1 6/7
6
f = freqüência do estator, em Hz.
Reat ância indutiva do rotor do motor de indução
Desde que os condutores do rotor têm uma resistência relativamente baixa (barras de
grande área, curtas no comprimento e curto-circuitadas nas extremidades), mas estãoengastados no ferro, eles possuem a propriedade da indutância e, consequentemente dareatância indutiva. Para um dado rotor de uma máquina de indução, a indutâncias dasbarras do rotor (Lr) é uma quantidade fixa (variando com o número de espiras, apermeabilidade, o comprimento e a área do circuito magnético), mas a reatânciaindutiva do rotor (Xr) variará com a freqüência do rotor. A determinação direta daindutância do rotor, independentemente da freqüência é um assunto difícil,particularmente, para máquinas grandes. É usual, pois, determinar-se a reatância dorotor com ele bloqueado, através de ensaios e então usar-se esta reatância como umpadrão de referência. Uma vez que a freqüência do rotor aumenta com oescorregamento e a reatância varia com a freqüência (Xr = 2·π·f ·Lr), a reatância do rotorpara qualquer freqüência sua é:
= × Onde:s escorregamento expresso em quantidade decimalXbl reatância de rotor bloqueado.
Tensão induzida no rotor do motor de indução
Se a freqüência da tensão CA induzida nas barras do rotor de um motor de indução variaentre zero, à velocidade síncrona, até a freqüência do estator, a rotor bloqueado, então atensão induzida no rotor para qualquer escorregamento é também uma função da tensãoinduzida a rotor bloqueado, ou seja:
= × Onde s é o escorregamento expresso em quantidade decimal e Ebl é a tensão induzida norotor bloqueado e Er é a fem induzida no rotor para qualquer valor do escorregamento.Portanto, a tensão induzida no rotor, a reatância deste e a sua freqüência variam todasem função do escorregamento desde um máximo para rotor bloqueado até zero quando
a velocidade do rotor for igual à velocidade síncrona.
Torque desenvolvido no rotor do motor de indução
O torque desenvolvido na situação de motor parado para cada um dos condutoresindividuais do rotor pode ser expresso em função do fluxo ou corrente (que produz ofluxo), no estator e no rotor, respectivamente como:
= × Φ × × cos
Onde:Kt - uma constante de torque para o número de pólos, o enrolamento, as unidades
empregadas.

5/10/2018 motores_inducao_v_1 - slidepdf.com
http://slidepdf.com/reader/full/motoresinducaov1 7/7
7
Φ - fluxo produzido por cada pólo unitário do campo magnético girante que concatena ocondutor do rotor.
Ir·cosθr - componente da corrente do rotor em fase com Φ.
A necessidade do termo Ir·cosθ r surge do fato de que, enquanto as tensões induzidas noscondutores do rotor estão em fase com o campo magnético girante do estator, ascorrentes Ir nos condutores do rotor não estão, pois, os condutores do rotor têm umareatância indutiva apreciável devido ao escorregamento, ocasionando assim, o atraso dacorrente Ir do rotor em relação à Er de um ângulo θr. Portanto, apenas aquelacomponente da corrente que está em fase com o fluxo do rotor produzirá torque médioútil.