MODELADO EN UN ENTORNO VIRTUAL DE LA CELDA DE MANUFACTURA...
92
MODELADO EN UN ENTORNO VIRTUAL DE LA CELDA DE MANUFACTURA HAS – 200 OSCAR DAVID MEJÍA PIÑEROS IVÁN ARTURO RAMÍREZ ARCHILA Director: ING. JOHN ALEJANDRO FORERO CASALLAS M.SC. UNIVERSIDAD DISTRITAL – FRANCISCO JOSÉ DE CALDAS FACULTAD TECNOLÓGICA PROYECTO CURRICULAR DE INGENIERÍA MECÁNICA BOGOTÁ D.C. MAYO DE 2019
Transcript of MODELADO EN UN ENTORNO VIRTUAL DE LA CELDA DE MANUFACTURA...
MODELADO EN UN ENTORNO VIRTUAL DE LA CELDA DE MANUFACTURA HAS – 200
OSCAR DAVID MEJÍA PIÑEROS IVÁN ARTURO RAMÍREZ ARCHILA
Director: ING. JOHN ALEJANDRO FORERO CASALLAS M.SC.
UNIVERSIDAD DISTRITAL – FRANCISCO JOSÉ DE CALDAS FACULTAD TECNOLÓGICA
PROYECTO CURRICULAR DE INGENIERÍA MECÁNICA BOGOTÁ D.C. MAYO DE 2019
MODELADO EN UN ENTORNO VIRTUAL DE LA CELDA DE MANUFACTURA HAS – 200
OSCAR DAVID MEJÍA PIÑEROS IVÁN ARTURO RAMÍREZ ARCHILA
Director: ING. JOHN ALEJANDRO FORERO CASALLAS M.SC.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO CURRICULAR DE INGENIERÍA MECÁNICA
FACULTAD TECNOLÓGICA BOGOTÁ D.C.
Nota de aceptación
_____________________________
_____________________________
_____________________________
_____________________________
_____________________________
_____________________________ Firma del presidente jurado
_____________________________
Firma del jurado
_____________________________
Firma del jurado
__________________________
M.SC. JOHN ALEJANDRO FORERO CASALLAS
Bogotá D.C. ___________de 2019
4
CONTENIDO
Pág.
INTRODUCCIÓN ............................................................................................................. 16
1. PLANTEAMIENTO DEL PROBLEMA ........................................................................ 17
1.1. ESTADO DEL ARTE ............................................................................................. 19
1.1.1. Development of Conceptual Model for Virtualization of Bulk Materials Dispensing Technological Process ......................................................................................... 19
1.1.2. Control and Scheduling in Flexible Manufacturing Cells ....................................... 20
1.1.3. Virtual Reality for Manufacturing: A Robotic Cell Case Study ............................... 21
1.1.4. Research on Assembly Modeling Process Based on Virtual Manufacturing Interactive Application Technology ....................................................................... 22
1.1.5. Modelamiento en un entorno virtual de la celda de manufactura SMC- FMS -200 23
1.1.6. Manual de Usuario del 3DSupra versión usuario .................................................. 24
1.2. JUSTIFICACIÓN ................................................................................................... 25
2. OBJETIVOS ............................................................................................................... 25
2.1. OBJETIVO GENERAL ........................................................................................... 25
2.2. OBJETIVOS ESPECÍFICOS ................................................................................. 25
5
3. MARCO TEÓRICO .................................................................................................... 26
3.1. AUTOMATIZACIÓN INDUSTRIAL ........................................................................ 26
3.1.1. Antecedentes históricos ....................................................................................... 26
3.1.2. Tipos de automatización ...................................................................................... 28
3.1.3. Ventajas de la automatización industrial ............................................................... 28
3.1.4. Desventajas de la automatización industrial ......................................................... 29
3.1.5. Automatización de procesos ................................................................................ 29
3.1.6. Pirámide de automatización ................................................................................. 30
3.2. CELDAS DE MANUFACTURA FLEXIBLE ............................................................. 32
3.2.1. Celdas de Manufactura en “U” ............................................................................. 33
3.2.2. Simulación de una celda de manufactura ............................................................. 33
3.2.3. Ventajas y desventajas de celdas de manufactura ............................................... 33
4. METODOLOGÍA ........................................................................................................ 34
4.1. CONCEPTUALIZACIÓN ....................................................................................... 36
4.1.1. Búsqueda de información ..................................................................................... 36
4.1.2. Identificación de los componentes de las estaciones ........................................... 36
4.2. HAS-200 - SISTEMA ALTAMENTE AUTOMATIZADO .......................................... 36
6
4.2.1. El producto / proceso ........................................................................................... 37
4.2.2. El sistema modular ............................................................................................... 37
4.3. DISEÑO ASISTIDO POR COMPUTADORA .......................................................... 57
4.3.1. Búsqueda de componentes .................................................................................. 58
4.3.2. Identificación de software a utilizar ....................................................................... 60
4.4. MODELADO ......................................................................................................... 62
4.4.1. Desarrollo de planos ............................................................................................ 63
4.4.2. Búsqueda virtual de elementos estandarizados y/o comerciales .......................... 65
4.4.3. Modelamiento de sub-ensambles de cada estación ............................................. 68
4.4.4. Ensamble de estaciones de trabajo ...................................................................... 69
4.4.5. Ensamble de la celda de manufactura.................................................................. 74
4.4.6. Revisión generalizada de cada componente ........................................................ 75
4.5. SIMULACIÓN DE MOVIMIENTOS DE LA ESTACIÓN 1 DE LA CELDA DE
MANUFACTURA HAS 200. .................................................................................. 75
4.5.1. Generalidades de la simulación ........................................................................... 75
4.5.2. Descripción para la simulación de movimientos en el programa Siemens NX® ... 79
4.5.3. Generación de video simulación estación de trabajo ............................................ 81
4.6. RECOPILACIÓN DE LA INFORMACIÓN .............................................................. 82
7
5. CONCLUSIONES ...................................................................................................... 87
6. BIBLIOGRAFÍA ......................................................................................................... 90
8
ÍNDICE DE FIGURAS
Pág.
Figura 1. Pirámide de la automatización .......................................................................... 30
Figura 2. Esquema de la metodología a utilizar. .............................................................. 35
Figura 3. Productos de la celda de manufactura HAS-200 ............................................... 37
Figura 4. Productos de la celda de manufactura HAS-200 ............................................... 41
Figura 5. HAS-(202-204) Producción. .............................................................................. 42
Figura 6. Has-(205-206) Medición.................................................................................... 45
Figura 7. HAS-207 Colocación de la tapa. ....................................................................... 47
Figura 8. HAS-208 Almacen vertical ................................................................................ 49
Figura 9. HAS-209 Almacen horizontal. ........................................................................... 53
Figura 10. HAS-210 Paletizado. ....................................................................................... 54
Figura 11. HAS-211 Almacen de materia prima. .............................................................. 56
Figura 12. HAS-212 Almacen de reciclado. ..................................................................... 57
Figura 13. Software Solid Works® utilizado para el modelamiento de la celda de
manufactura HAS 200. ..................................................................................................... 61
Figura 14. Software NX de Siemens® utilizado para la simulación del modelo de la
estación 1 de la celda de manufactura HAS200. .............................................................. 62
9
Figura 15. Aplicación QuickMemo+® para anotaciones de medidas en imágenes. ......... 63
Figura 16. Creación de mesa con medidas tomadas y perfiles descargados. .................. 64
Figura 17. Planos de las estaciones suministrados por SMC®. ....................................... 64
Figura 18. Planos de subensambles con referencia de componentes. ............................. 65
Figura 19. Página para descarga de perfiles en aluminio. ................................................ 66
Figura 20. Referencia en plano SMC® de actuadores neumáticos. ................................. 66
Figura 21. Página principal para descarga de componentes SMC®. ............................... 67
Figura 22. Variación de características de componentes para descarga en página SMC®.
........................................................................................................................................ 67
Figura 23. Actuador MY1C25G – 200 descargado para Solid Works®. ........................... 68
Figura 24. Subensambles estación 1, 2 y 3. A la izquierda: alimentador de recipientes; a la
derecha: desplazador de recipientes. .............................................................................. 69
Figura 25. Mesa base para ensamble de estaciones. ...................................................... 70
Figura 26. Ensamble de banda transportadora generalizada de conexión entre estaciones.
........................................................................................................................................ 70
Figura 27. Modelado en 3D con software Solid Works® de estación 1, 2 y 3 (Dispensador
perlas de colores) Celda de manufactura HAS-200®. ...................................................... 71
Figura 28. Modelado en 3D con software Solid Works® de estación 4 (Medida vertical de
producto), Celda de manufactura HAS-200. .................................................................... 71
Figura 29.. Modelado en 3D con software Solid Works® de estación 5 (Postura de tapa y
etiquetado), Celda de manufactura HAS-200. .................................................................. 72
10
Figura 30. Modelado en 3D con software Solid Works® de estación 6 (Almacén
horizontal), Celda de manufactura HAS-200 .................................................................... 72
Figura 31. Modelado en 3D con software Solid Works® de estación 7 (Almacén vertical),
Celda de manufactura HAS-200. ..................................................................................... 73
Figura 32. Modelado en 3D con software Solid Works® de estación 8 (Paletizado), Celda
de manufactura HAS-200................................................................................................. 73
Figura 33. Modelado celda de manufactura HAS-200 en entorno de software Solid
Works®. ........................................................................................................................... 74
Figura 34. Modelado celda de manufactura HAS-200 renderizado con software Solid
Works®. ........................................................................................................................... 75
Figura 35. Entorno inicial del programa Siemens NX®. ................................................... 76
Figura 36. Ícono para ingresar al diseñador de conceptos de mecatrónica. ..................... 77
Figura 37. Ícono para ingresar al módulo directo de animación de simulaciones. ............ 77
Figura 38. Modelo estaciones 1, 2 y 3 de la celda de manufactura HAS 200 dentro del
entorno del programa Siemens NX®. .............................................................................. 78
Figura 39. Almacén de partida de los recipientes para proceso. ...................................... 80
Figura 40. Actuadores principales que desplazan los recipientes para elaboración de
proceso. ........................................................................................................................... 80
Figura 41. Movimiento giratorio del recipiente. ................................................................. 81
Figura 42. Movimiento de cadenas porta cable obtenido de puntos sobre trayectos en
croquis sobre plano. ........................................................................................................ 81
Figura 43. Herramienta para la exportación de simulación a formato de video. ............... 82
11
Figura 44. Plano isométrico de la Estación 1 (Plano E1/0-0). ........................................... 83
Figura 45. Plano de posicionador de caja de Estación 1 (E1/2-0 y E1/2-1). ..................... 84
Figura 46.Plano de banda transportadora general y partes (BT1/1-0 y BT1/1-1). ............ 85
Figura 47. Ejemplo de tabla de partes en Excel obtenida con Treehouse. ....................... 86
12
ÍNDICE DE TABLAS
Pág.
Tabla 1. Accesorios y actuadores descargados. .......................................................... 59
13
ANEXOS
ANEXO A. PLANOS Y DOCUMENTACIÓN DE PARTES DE LA CELDA DE
MANUFACTURA HAS – 200 DE LA UNIVERSIDAD DISTRITAL FRANCISCO
JOSÉ DE CALDAS FACULTAD TECNOLÓGICA.
ANEXO A1. LISTADO DE PARTES EN EXCEL DE LA CELDA DE
MANUFACTURA HAS – 200 DE LA UNIVERSIDAD DISTRITAL FRANCISCO
JOSÉ DE CALDAS FACULTAD TECNOLÓGICA.
ANEXO B. TUTORIAL DE SIMULACIÓN EN NX DE SIEMENS® PARA ESTACIÓN 1, DE LA CELDA DE MANUFACTURA HAS-200 DE LA UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD TECNOLÓGICA
14
RESUMEN
En la actualidad, la automatización es el pilar de la industria a nivel general, siendo
aplicada desde la culinaria hasta en procesos de alta precisión, como lo es en el
sector de fabricación de procesadores para computadores en donde los
movimientos y rutinas de los dispositivos son muy veloces y eficientes. En la
industria de la manufactura ha destacado su aporte no sólo para realizar productos
con rapidez sino entregarlo con calidad, haciendo que las necesidades en estos
mecanismos generen diferentes tipos de sistemas que faciliten la fácil ejecución
de sus procesos y, que a su vez, sean de fácil modificación como los sistemas
modulares de las celdas de manufactura que permiten la modificación de
posicionamiento de piezas y facilitan de alguna manera ampliar la gama de
productos en una sola estación.
Esta misma flexibilidad que se ha venido creando para los procesos debe verse
reflejada en los sistemas de control que se ejecutan dentro de los entornos de
manipulación, no solo a nivel industrial, sino también a nivel educativo, de manera
que este proyecto, pretende la creación de un entorno virtual flexible por medio del
modelamiento con un sentido precursor hacia la simulación de la celda de
manufactura HAS - 200 de la Facultad Tecnológica de la Universidad Distrital -
Francisco José de Caldas, queriendo entregar una herramienta que a diferencia
de las que son suministradas por las compañías constructoras, esta pueda no solo
ser alterada, sino, que también posea la recopilación de información y fuentes
para impulsar a la investigación que abarque desde los diseños básicos de una
celda de manufactura hasta el control de procesos desde un entorno virtual.
El principal objetivo de este proyecto de grado es aportar a la universidad un
modelo en versión CAD de la celda de manufactura que se encuentra en la
Facultad Tecnológica, generando una herramienta con dimensiones muy precisas
y además una simulación básica de funcionamiento, con la posibilidad de realizar
simulaciones de rutinas para diseñar mejoras en los procesos.
La realización de este proyecto se hizo en tres fases las cuales podían ser
ejecutadas independientemente después de la búsqueda de información o de la
búsqueda de componentes las estaciones, por medio de la integración de fuentes
de información claras y con la información ya realizada en el trabajo de grado del
modelamiento de la celda de manufactura FMS-200 se modelaron cada una de las
estaciones. Este modelamiento se realizó por medio de una herramienta de diseño
asistido por computador CAD (Computer -Aided Design por sus siglas en inglés),
en la cual se modeló cada estación con sus elementos ensamblados y, a su vez,
un ensamble general de la celda de manufactura adecuado para analizar

15
movimientos y simulaciones. En el software NX 11 de Siemens se desarrolló la
simulación de movimientos de la estación 1, con base en su funcionamiento,
secuencias y tiempos.
ABSTRACT
Today automation is the mainstay of industry at the general level being applied
from culinary to high-precision processes as it is in the manufacturing sector for
computers where the movements and routines of devices are very fast and
efficient, in the manufacturing industry has highlighted its contribution not only to
make products quickly but deliver it with quality making the needs in these
mechanisms generate different types of systems that facilitate the easy execution
of your processes, and that in turn are easily modified as modular systems of the
manufacturing cells that allow the modification of parts positioning and facilitate in
some way to expand the product range in a single station.
This same flexibility that has been created for the processes must be reflected in
the control systems that run within the manipulation environments, not only at the
industrial level but also at the educational level, so that this project aims to
Creation of a flexible virtual environment by means of modeling with a precursor
sense towards the simulation of the manufacturing cell HAS - 200 of the
Technological faculty of the District University - Francisco José de Caldas, wanting
to deliver a tool that to difference of those that are supplied by the construction
companies, this can not only be altered, but also possess the collection of
information and sources to encourage the research that encompasses from the
basic designs of a manufacturing cell to process control from a virtual environment.
The main objective of this degree project is to contribute to the University a model
in CAD version of the manufacturing cell that is located in the Technological
Faculty, generating a tool with very precise dimensions and also a basic simulation
of operation, with the possibility to perform simulations of routines to design
improvements in the processes.
The accomplishment of this project was done in three phases which could be
executed independently after the search of information or the search of
components the stations, by means of the integration of sources of information.
Clear and with the information already made in the grade work of the
manufacturing cell FMS-200, each station was modeled. This modeling was carried
16
out through a CAD computer Aided design (computer-aided design) tool, in which
each station was modeled with its assembled elements and in turn a General
Assembly of the manufacturing cell. Suitable for analyzing movements and
simulations. In Siemens's NX 11 software, the motion simulation of Station 1 was
developed, based on its operation, sequences and times.
INTRODUCCIÓN
La automatización como término, alude a que determinadas acciones se hagan
por sí solas, sin la participación directa de un individuo. En uno de los casos
específicos en el que este proyecto tiene interés, que es en el ámbito industrial,
estas características han sido fundamentales para el crecimiento de industrias en
el que las demandas y la complejidad de sus productos han intervenido como
necesidades para establecer sistemas que por medio de diseños complejos las
satisfagan.
A nivel Colombia es importante hacer proyecciones debido al rápido avance que
se tiene a nivel mundial. En análisis estadísticos publicados por la revista dinero
proyectan que para el año 2020 el grado de automatización en el sector
empresarial colombiano será de entre el 25% al 30%, además el 45% de los
trabajos que actualmente ejercen las personas podrían ser reemplazados por la
tecnología actual.
(https://www.dinero.com/emprendimiento/articulo/automatizacion-en-las-empresas-
colombianas-en-el-2020-segun-deloitte/242846)
Es por esta razón, que hacen énfasis en no ver a las tecnologías de este tipo
como un enemigo que va a venir a desplazar y reemplazar las labores que se han
venido desempeñando por manos humanas y se establecen razones como;
entender a la tecnología en el contexto laboral como una herramienta y no como
una amenaza; entender los negocios y las operaciones en detalle para integrar la
automatización de manera efectiva; tener la capacidad analítica para interpretar la
información y aprovecharla, pues habrá más tiempo que pensar. Por ello, el
desarrollo de competencias en matemáticas y estadística será fundamental;
habilidad de interrelacionarse con grupos multidisciplinares que complementen las
tareas que se vienen haciendo; estar preparado al cambio, el mundo exige
adaptarse.
17
1. PLANTEAMIENTO DEL PROBLEMA
La importancia de integrar herramientas que faciliten la enseñanza dentro de las
aulas educativas y que integren modelos de tipo práctico y didáctico, que bajo
simulaciones de ambientes y situaciones reales, aprendan estructurar en el
estudiante métodos de diseño a lo largo de todo el ciclo de vida de un producto,
desde su creación a partir de una necesidad, su diseño, métodos de fabricación
eficientes y autónomos, que demanden de la mano del ser humano solo análisis
de funcionamiento, matemático y estadístico en el que se pueda predecir sobre
sus equipamientos las intervenciones de todo tipo de mantenimiento requeridos.
Para esto empresas líderes en automatización han creado propuestas con fines
educativos que a este paso deberían ser implementadas no solo en las
universidades si no en cualquier tipo de establecimiento educativo para que desde
muy jóvenes se despierte un sentido laboral analítico más que operativo para el
desarrollo de productos que es a donde la tecnología empuja al ser humano para
desarrollar este tipo de sistemas.
(https://agenciadenoticias.unal.edu.co/detalle/article/modelos-virtuales-mejoran-
aprendizaje-de-la-ciencia.html, 2016)
Sobre este tipo de herramientas para la enseñanza la Facultad Tecnológica de la
Universidad Distrital - Francisco José de Caldas tiene en sus laboratorios algunos
compendios que simulan de manera tangible procesos de automatización como lo
son los bancos de neumática e hidráulica de Festo® y las celdas de manufactura
FMS 200 y HAS 200 de la compañía SMC®.
En los bancos de neumática e hidráulica de Festo® se pueden apreciar no solo los
componentes de un sistema automatizado sino además el desarrollo de análisis
sobre máquinas reales con simulaciones expuestas de circuitos que solucionan
una secuencia para el desarrollo de una operación.
El sistema didáctico modular de ensamblaje flexible FMS 200 es un sistema para
la capacitación integral adaptable a diferentes necesidades de centros de
formación y empresas que cuenta para el caso de la Universidad, con seis
estaciones, las cuales contienen componentes industriales y posibilidades de
configuración simple o compleja en el que se incluye toda una serie de
operaciones de alimentación, manipulación, verificación, carga, etc. realizados
mediante componentes de diferentes tecnologías (neumática, hidráulica,
sensórica, robótica, etc.).
Con el mismo objetivo enfocado hacia la enseñanza se tiene el sistema altamente
automatizado, la celda de manufactura HAS 200 que reproduce por medio de
varias estaciones modulares un proceso productivo en el que perlas de colores
18
son envasados produciendo diferentes productos que son clasificados a lo largo
de todo el proceso por medio de código de barras. Una vez llenado con la cantidad
correspondiente, a los recipientes se les coloca una tapa y una etiqueta donde se
incluye la fecha de fabricación y otras informaciones. Después, el producto se
envía a la estación de expediciones o a los almacenes en espera de ser
despachados.
Cada estación integra un tramo de cinta transportadora que une las estaciones,
además cada una de estas disponen de panel / botonera de control, así como de
una baliza tricolor de indicación y PLC, lo que permite su funcionamiento en modo
manual e integrado. La conexión entre las estaciones y el sistema de gestión se
realiza a través de una red ethernet que posibilita gran velocidad en el flujo de
datos y estandarización a nivel mundial.
Sin duda alguna este tipo de mecanismos trascienden sobre los métodos de
enseñanza tradicional y consiguen mejorar en un alto grado el entendimiento
sobre sistemas y mecanismos automatizados, es por esta razón que la gran
inversión que se hace sobre este tipo de equipamientos debe ser aprovechada y
explotada de manera efectiva haciendo posible que se trabaje con estos
elementos desde la investigación por medio del desarrollo de herramientas que
complementen aspectos que podrían a llegar a ignorarse a la hora de tener
contacto con estas celdas como por ejemplo la visualización del correcto
funcionamiento de cada una de las estaciones o el posicionamiento de cada uno
de sus elementos, las indicaciones por parte de balizas o la correcta programación
del PLC, aspectos que restringen la manipulación de personas no capacitadas
para su operación.
Por estas razones en el año 2015 se desarrolló el proyecto de modelamiento en
un entorno virtual de la celda de manufactura SMC - FMS - 200 la cuál pretendía
servir como base para la simulación de cada una de las estaciones y ahora con
este proyecto se pretende seguir con la línea de proceso de este objetivo general
para la celda de manufactura SMC – HAS – 200 bajo la búsqueda de análisis de
profundización de este conjunto de maquinaria especializada que proyecten hacia
nuevas tesis de ingeniería a partir de su ensamblaje virtual como sería después de
la simulación, la búsqueda de fallos, mejoramientos en la producción, desarrollo
de nuevas estaciones, programaciones de todo tipo de mantenimiento en el
entorno virtual para el real, operaciones a distancia con visualización en entorno
virtual en tiempo real, entre otras.
19
1.1. ESTADO DEL ARTE
Desde hace décadas cuando apareció la automatización industrial se han
desarrollado simultáneamente herramientas informáticas para optimizar y
simplificar los procesos de manufactura, volviéndose así una disciplina con un
amplio espectro de investigación por lo tanto han surgido métodos para controlar y
simular con más precisión sistemas, rutinas de mecanismos y procesos para
obtener mejoras en la eficiencia y los costos a la hora de implementar un proceso
automatizado de manufactura.
Por medio de una búsqueda realizada en la red consultando sitios especializados
como IEEE, SCOPUS, SPRINGER LINK, etc… y otras fuentes tales como
bibliotecas universitarias las cuales están compenetradas con la información
suministrada por estos sitios web; debido a todo esto se puede observar a
continuación que las fuentes citadas son de los años 2015, 2017, 2018 lo cual
indica que la virtualización de los sistemas de manufactura flexible es necesaria
para poder optimizar y además para ampliar las herramientas didácticas de
aprendizaje e investigación.
Además de esto también se tomó como base de consulta el manual de
funcionamiento del software 3D SUPRA el cual es suministrado de forma exclusiva
para la estación de manufactura flexible HAS-200, y finalmente el trabajo de grado
realizado por el compañero Jheison Javier Garzón Pineda de la Universidad
Distrital - Francisco José de Caldas de la Facultad Tecnológica el cual se titula
"MODELAMIENTO EN UN ENTORNO VIRTUAL DE LA CELDA DE
MANUFACTURA SMC- FMS -200".
1.1.1. Development of Conceptual Model for Virtualization of Bulk Materials
Dispensing Technological Process (A., 2017)
Resumen: Con esta investigación se desea mejorar el proceso para dispensar
materiales a granel creando un modelo conceptual de virtualización obteniendo un
espacio de información unificado para la administración de ciclo de vida del
proceso con modelos virtuales, estructurales y modelo matemático del proceso.
Aquí destacan la virtualización de procesos como herramienta colaboradora entre
la operación e interventores de esta tales como administrativos, analistas del
proceso tecnológico, proveedores y evaluadores de funcionamiento de piezas e
interesados en la seguridad funcional del proceso.
20
Para ello se debe tener el conocimiento base que incluye el funcionamiento de
cada uno de los componentes al grado de obtener un diagrama de flujo estructural
del que se desprende el algoritmo de control de proceso que para el caso de
dispensación de material a granel (DMG) relaciona el aspecto volumétrico de
entrada a la banda de pesaje y la velocidad de la misma.
Como aspectos importantes para la conceptualización virtual se debe tener en
cuenta la construcción del espacio de información unificado (UIS) de todo el ciclo
de vida del proceso (DGM) entre los que se encuentra información sobre equipos,
datos de referencia para el lote de pesaje, planificación de registros con respecto a
la distribución de materiales a granel, información necesaria para controlar el
trabajo de pesar el lote, información sobre los usuarios del sistema virtual de
dispensación de materiales a granel, información contable de empresas que son
miembros de la empresa virtual, información sobre pedidos para la
implementación del proceso de dispensación de materiales a granel, información
reglamentaria necesaria para gestionar las relaciones contractuales con empresas
que son miembros de la empresa virtual.
Para la realización de esta propuesta establecen modelos conceptuales de
virtualización de procesos tecnológicos, modelo visual del proceso tecnológico de
la virtualización de DGM y modelo orientado a objetos de virtualización de
procesos tecnológicos de los materiales de dosificación a granel de los que
obtuvieron finalmente: Actualización en base de datos de las características
utilizadas por los participantes de la virtualización y las descripciones de los tipos
de trabajo realizados por la entidad virtual. Dichas características determinan el
conjunto específico de capacidades de producción y el alcance de su carga actual,
las preferencias en la realización de este o aquel tipo de procedimiento de
ingeniería, el nivel de calidad y los costos del rendimiento de las obras, etc.
1.1.2. Control and Scheduling in Flexible Manufacturing Cells (FERROLHO,
2006)
Resumen: Este trabajo presenta un método de control y programación sobre
celdas de manufactura flexible para lo que se desarrolló un FMC con
características industriales para el estudio de control y problemas de programación
en este tipo de sistemas.
Para este propósito se diseñaron 4 sectores en la celda de manufactura; sector de
manufactura, sector de ensamblaje, sector de manipulación y sector de
almacenamiento para lo que se crearon programas hardware y software
21
desarrollando una interfaz (DNC) para el control de máquinas CNC y aplicaciones
para los robots en cada uno de estos.
La computadora central controla la producción conectando varias computadoras y
redes de comunicación de datos y es aquí donde se implementan las tres primeras
capas de la estructura jerárquica del sistema explicados uno por uno.
Se desarrollo una herramienta de software llamada HybFlexGA que es un
algoritmo genético para desarrollar problemas de programación de la FMC. El
buen desempeño de estos algoritmos depende la evaluación hecha seleccionando
los mejores operadores de cruce y mutación de rendimiento que no es más que un
sistema de evaluación que ayuda a escoger la mejor elección.
Se examinaron cada uno de los operadores de cruce y de mutación
independientemente bajo condiciones específicas obteniendo graficas de
dispersión que otorgaban información necesaria para su elección.
Para la evaluación final experimental se escogieron aleatoriamente algunas
instancias de problemas evaluados en los seis primeros operadores de cruce y el
mejor operador de mutación obteniendo solución óptima, promedio de solución de
CPU (segundos) y el promedio de generaciones para cada problema de instancia
encontrando las mejores combinaciones para la solución de problemas.
1.1.3. Virtual Reality for Manufacturing: A Robotic Cell Case Study (Saber,
2015)
Resumen: En este documento, se desarrolla un entorno virtual para una célula
robótica, de modo que el diseño en este tipo de simulaciones se valida y se lleva a
cabo la planificación de la implementación para configurar la célula robótica real y
por medio de este estudio se analiza la realidad virtual como enfoque previo para
la creación de productos y disminuir tiempo y costos en el diseño de los mismos.
Para esto el autor relaciona cada una de las aplicaciones, listando y explicando lo
relacionado con diseño y creación de prototipos, ensamblaje, inspección,
planificación de diseño, mecanizado, entrenamiento y simulación.
Con esta información se remite a la explicación del desarrollo en realidad virtual de
la celda robótica enfatizando sobre la planificación de disposición factible para
configurar la célula robótica real. Aquí empieza explicando acerca de la
arquitectura de hardware y software haciendo notar por su equipamiento que el
proyecto enfoca la mayoría de las aplicaciones de la realidad virtual por incluir
22
inclusive gafas estereoscópicas en 3D. En cuanto a software utilizan programas
como el CATIA para la generación de modelos CAD, DIVISION MockUp para las
diversas características estéticas, Pro-engineer como enlace entre el CATIA y
DIVISION MockUp, Virtalis stereo-server para funcionalidad interactiva,
visualización en tiempo real e integración de varios dispositivos de realidad virtual.
Después se explica el paso a paso de la elaboración de la celda robótica virtual
incluyendo la discusión con ingenieros sobre el número de robots y accesorios que
debía contener seguido de la aplicación de los softwares mencionados
anteriormente.
Acto seguido explican las aplicaciones de la celda virtual diseñada que incluye
entre otros aspectos la planificación del diseño de la celda robótica real en la cual
más adelante serviría con éxito para su fabricación. Para entrenamiento y
enseñanza como técnica para capacitar a los empleados respecto a su
funcionamiento y evitar daños posteriores.
1.1.4. Research on Assembly Modeling Process Based on Virtual
Manufacturing Interactive Application Technology (Technology, 2017)
Resumen: El interés de este documento está basado en el análisis sobre el diseño
de ensamblaje teniendo en cuenta los aspectos de reducción de tiempo y costos y
además para el proceso de mantenimiento por medio de la tecnología de
aplicación interactiva de manufactura virtual (VMIAT) con la herramienta DELMIA.
El proceso consiste en simular los diferentes prototipos que se tengan de una
máquina modelada analizando por medio de un humano virtual dentro de la
aplicación cuatro aspectos fundamentales para la definición de la mantenibilidad
de los prototipos como son; espacio para la operación de la herramienta,
visibilidad, accesibilidad y postura de trabajo en el que el programa DELMIA
permite la observación virtual de estos aspectos con el desarrollo de un entorno
programado que imita desde las características físicas del humano virtual hasta el
tipo de herramientas para hacer el ensamble o mantenimiento.
Bajo criterios de evaluación los métodos de ensamblaje y mantenibilidad son
analizados por medio de fórmulas estadísticas, modelos jerárquicos, matrices de
cálculo de peso que definen una evaluación global para lograr establecer el diseño
que haga más efectivos estos dos procesos.
23
Este trabajo desarrolla análisis que permiten disminuir costos y eliminar horas de
trabajo en los diseños de ensamblaje, además de la optimización de diseños para
el mantenimiento y reparación de los mismos aplicable a una máquina o producto.
1.1.5. Modelamiento en un entorno virtual de la celda de manufactura SMC-
FMS -200 (Garzón Pineda, 2015)
La necesidad por mejorar las condiciones de enseñanza y facilitar el aprendizaje
por parte de los estudiantes de carreras profesionales, ha llevado al desarrollo y
uso de celdas de manufactura flexible por parte de las instituciones de educación
universitaria; en Colombia el uso de estas herramientas se ha implementado con
mayor fuerza, como es el caso de la Universidad Distrital - Francisco José de
Caldas donde se dispone de la celda conocida comercialmente como la FMS –
200 compuesta por seis estaciones de trabajo que realizan el proceso de montaje
de un sistema de giro.
El objetivo del presente proyecto de grado es poner a disposición la celda de
manufactura que se encuentra en la facultad Tecnológica en un ambiente virtual,
donde se identifiquen cada una de las estaciones de trabajo con sus respectivos
subconjuntos, con el fin ofrecer a los docentes y estudiantes de una herramienta
para el desarrollo de la clase impartida, adicionalmente con el modelamiento de la
estación se entrega a la facultad una base para el desarrollo de proyectos
relacionados con celda de manufactura.
Para el desarrollo del proyecto se debió realizar una búsqueda minuciosa de
información sobre la celda, sus elementos y componentes, el funcionamiento de
los mismos y la forma en que interactúan para conseguir el ensamble de sistema
de giro compuesto por 5 partes, una base o cuerpo, un rodamiento, un eje, una
tapa y los tornillos para contener los elementos.
El paso por seguir fue el modelamiento de los elementos por medio de una
herramienta de diseño asistido por computador CAD (Compute - Aided Design, por
sus siglas en inglés), en la cual se realizó primero el modelado de cada uno de los
subensambles que componen cada estación y posteriormente se realizó el
ensamble de todas para conformar la celda de manufactura.
Por último, se implementó el software NX 8.5 de Siemens® para realizar la
simulación de movimientos de la estación 1, alimentación de la base o cuerpo,
donde se pueden distinguir cada uno de los pasos que se llevan a cabo dentro del
proceso en el funcionamiento de la celda de manufactura que corresponde con los
24
tiempos y secuencia en que trabaja la celda real en el laboratorio de la
Universidad.
Con el desarrollo del proyecto se logró el modelamiento de la celda y cada una de
sus estaciones en un ambiente virtual, el cual puede ser consultado para
identificación de sus componentes por los estudiantes y docentes que ofrecen
catedra con la celda como herramienta de trabajo, adicionalmente se dispone de
una base de información adecuada para el desarrollo de futuros proyectos
relacionados con la celda de manufactura.
En el desarrollo del proyecto se toma un apartado para realizar un pequeño y
resumido instructivo sobre el método para realizar la simulación de movimientos a
través del software NX 8.5®, con el uso de su módulo especializado para tal fin.
1.1.6. Manual de Usuario del 3DSupra versión usuario (SMC, Manual de
Usuario del 3DSupra versión usuario, 2005)
3D Supervisor Remote Access (3DSupra) es una herramienta de supervisión
específicamente diseñada para supervisar estaciones de trabajo como las que
conforman la célula de fabricación flexible HAS 200, desarrollada por SMC IT.
En ningún momento debe de confundirse 3DSupra con un software de tipo
SCADA, ya
que sus funcionalidades no han sido diseñadas para este propósito.
3DSupra ha sido diseñado con dos modos de funcionamiento:
- 3DSupra en su forma de trabajo teaching, permite al usuario el
conocimiento del entorno de automatización que pretende controlar. Este
modo de trabajo es especialmente útil en la proposición de diferentes tareas
de aprendizaje de tipo práctico relacionadas con el mundo de la
automatización industrial. Trabajando en este modo de funcionamiento, el
usuario puede conocer perfectamente el funcionamiento de la estación de
trabajo gracias al visor 3D que incorpora 3DSupra.
- 3DSupra en su forma de trabajo on-line, permite controlar y supervisar el
funcionamiento de las estaciones de trabajo a las que se encuentre ligado.
En el caso del sistema de fabricación flexible HAS - 200, permite supervisar
y controlar cada una de las diez estaciones de la línea.
25
1.2. JUSTIFICACIÓN
Los entornos virtuales son de amplio uso en la industria, en el ámbito académico y
en el campo de la investigación por eso amerita que la Universidad posea una
herramienta de uso académico la cual puede servir de base o contribución para el
desarrollo de proyectos con distintos objetivos en el campo de la automatización,
programación, simulación e incluso optimización en la celda de manufactura HAS-
200, proporcionando así un entorno virtual propio desarrollado para la formación
académica de los estudiantes posibilitando la distinción de los elementos y las
piezas que componen la celda así como su funcionamiento básico dando una
mejor interfaz de comprensión de limitaciones físicas de desplazamiento de
interacción que están involucradas en el funcionamiento de la celda, disminuyendo
el riesgo de daños por mal uso en caso de ser manipulado por estudiantes que no
posean la experiencia previa en el tema.
Además, a diferencia del software de supervisión 3D Supra se proporcionará una
interfase virtual la cual permite mayor interacción permitiendo la profundización en
la investigación sobre la celda de manufactura, integrándose a un conjunto de
proyectos a futuro que se vayan presentando en el semillero de automatización.
2. OBJETIVOS
2.1. OBJETIVO GENERAL
Modelar cada una de las estaciones de la celda de manufactura HAS - 200 que se
encuentra en la Facultad Tecnológica de la Universidad Distrital - Francisco José
de Caldas.
2.2. OBJETIVOS ESPECÍFICOS
- Recopilar datos necesarios para levantamiento de planos de las estaciones
de la celda de manufactura HAS-200.
26
- Suministrar a la Universidad Distrital - Francisco José de Caldas modelos
virtuales de la celda de manufactura HAS-200.
- Documentar modelos de partes de la celda de manufactura.
- Realizar simulación básica de una de las estaciones de la celda de
manufactura.
- Documentar el desarrollo de la simulación para futuros procesos similares.
3. MARCO TEÓRICO
El avance de la automatización industrial es cada vez más amplio generado por el
interés de la demanda de productos que hace que se necesite hacer operaciones
con mayor rapidez eficiencia y calidad. Con este fundamento como eje central de
este trabajo se estableció que como conocimientos previos para la elaboración de
este proyecto se debe conocer acerca de temas como la automatización industrial
y de procesos, acerca del desarrollo de celdas de manufactura flexible y diseño
asistido por computadora, por esta razón presentamos a continuación un apartado
acerca de estos temas.
3.1. AUTOMATIZACIÓN INDUSTRIAL
3.1.1. Antecedentes históricos
Gracias al desarrollo e innovación de nuevas tecnologías, la automatización de
procesos industriales, a través del tiempo, ha dado lugar a avances significativos
que le han permitido a las compañías implementar procesos de producción más
eficientes, seguros y competitivos. A continuación, se presentan aspectos
relevantes a lo largo de la historia en cuanto a este tipo de innovaciones.
1947: La idea original: Físicos John Bardeen, Walter Brattain y William Shokkley
desarrollan el primer transistor en los laboratorios de Bell. Heinrich Grünebaum (en
la imagen entre Jans Lenze y la hija de Lenze, Elisabeth Belling en la Feria de
Hannover de 1952) desarrolló el motor Alquist, que se convirtió en el padrino de
27
los motores controlados. Revolucionó los procesos de rebobinado en muchos
años (60) de tecnología de automatización.
1959: Primera herramienta de maquinado controlada por computador. El primer
controlador Simatic en un torno capstan fue presentado en la sexta versión de la
feria EMO de París. La lógica todavía era por cableado.
1967: Antes de la electrónica de potencia: Antes de que los diodos, tiristores y los
IGBT´s estuvieran disponibles, las corrientes eran rectificadas con rectificadores
de selenio, o con rectificadores de arco de mercurio gigantes emitiendo luz azul
misterioso. Las unidades electrónicas. En 1967 AMK presentó el primer motor de
corriente de jaula de ardilla de tres fases infinitamente variable de producción
masiva. Ocho años después otra innovación de AMK permitió que varios motores
de tres fases fueran operados con sincronismos angulares por primera vez.
1968: PLC: La exitosa historia del PLC empezó con el Control Industrial Modular
de Dick Morley.
1978: A nivel de máquinas: dispositivos de programación de la era pre-PC eran
muy grandes y pesados. La programación CNC a nivel de máquinas – una vez
más introducido por AMK – representó un proceso notable.
1987: Coincidencia: un cliente solicitó que un sistema de control Beckhoff fuera
equipado con un disco duro. La solución más simple fue la de integrar un PC.
Pronto se evidenció que el PC podría hacer más que actuar como un recolector de
datos para el sistema de control, y la era de los PC en la industria de la
automatización arrancó.
1997: Empuje de integración: la tecnología de automatización consiste cada vez
más en un control descentralizado e inteligente y con componentes de control que
se puedan comunicar con otros mediante Ethernet industrial.
Fábrica digital y comisionamiento virtual: el mundo del desarrollo de productos
digitales se fusiona con la tecnología de automatización. Programas de control
para procesos de producción están desarrollados basados en la simulación.
2004: La funcionalidad del PLC fue descubierta en un chip. (Evolución de la
automatización industrial)
28
3.1.2. Tipos de automatización
En el sector industrial se distinguen tres tipos de automatización según el grado de
producción y las necesidades de las empresas:
Automatización fija: diseñada para la manufactura a gran escala: Se utiliza una
maquina o equipo especializado para producir una parte de un producto o el
producto en sí mismo, en una secuencia fija y continua. Este tipo de
automatización es ideal en la fabricación de grandes volúmenes de productos que
tienen un ciclo de vida largo, un diseño invariable y una amplia demanda de los
consumidores. Sus principales limitaciones son el alto costo de la inversión inicial
y la poca flexibilidad del equipo para adaptarse a los cambios del producto.
Automatización programable: adecuada para un volumen de producción más
pequeño, segmentado por lotes. Permite cambiar o reprogramar la secuencia de
operación, por medio de un software, para incluir las variaciones del producto.
Entre los equipos más usados para este tipo de automatización se encuentran las
máquinas de control numérico, los robots y los controladores lógicos
programables.
Automatización flexible: pensada para un nivel de producción medio. Es la
ampliación de la automatización programable. Reduce el tiempo de programación
del equipo y permite alternar la elaboración de dos productos (en series) al
mezclar diferentes variables. La flexibilidad se refiere a la capacidad de los
equipos para admitir los cambios en el diseño y configuración del producto,
reduciendo así los costos para las compañías.
(http://herramientas.camaramedellin.com.co/Inicio/Buenaspracticasempresariales/
BibliotecaProducciónyOperaciones/Automatizaciondelosprocesosindustriales.aspx
)
3.1.3. Ventajas de la automatización industrial (Claves, 2014)
- Disminuye los costos de fabricación.
- Aumenta la eficiencia del proceso productivo.
- Agiliza la respuesta a las demandas del mercado.
- Reemplaza al hombre en trabajos de gran esfuerzo que ponen en peligro su
integridad física.
- Favorece la competitividad empresarial.
29
- Mejora la seguridad de los procesos y la calidad del producto.
- Permite hacer un control de calidad más exacto.
3.1.4. Desventajas de la automatización industrial
- Genera dependencia tecnológica.
- Requiere una gran inversión inicial.
- Falta de personal capacitado para el manejo de los equipos.
- Susceptibilidad a la obsolescencia tecnológica.
- Resistencia de los operarios al cambio.
Uno de los principales retos de la implementación de sistemas autómatas en las
industrias es equilibrar el trabajo que realizan los equipos computarizados y
robots, con el trabajo que ejecutan los operarios.
Si bien la tecnología ayuda a optimizar los procesos y releva al hombre de algunas
tareas, no lo reemplaza por completo. El error es asociar la automatización
industrial con el desempleo, pues la presencia humana es necesaria para la
gestión, supervisión y control de los procesos productivos.
3.1.5. Automatización de procesos
Como se ha venido tratando, la automatización de procesos, sin duda, constituye
uno de los objetivos de las organizaciones modernas permitiéndoles permanecer
activas en el entorno de alta competitividad al cual están sujetas. Los objetivos
que busca cada organización con la introducción de la automatización en cada
uno de sus procesos dependen de las necesidades que avoque estas entidades,
sin embargo, a continuación, se mencionarán algunos de los objetivos, se cree de
manera generalizada se destacan:
- Integrar diversos aspectos de las operaciones para mejorar la calidad.
- Mejorar la productividad.
- Reducir la intervención humana.
- Economizar espacio.
- Reducción de costos a largo plazo.
- Organizar el proceso para satisfacer la demanda.
Los anteriormente descritos dependen en gran medida de lo sofisticada que desee
llegar a ser la entidad que implante la automatización, como estrategia de negocio.
30
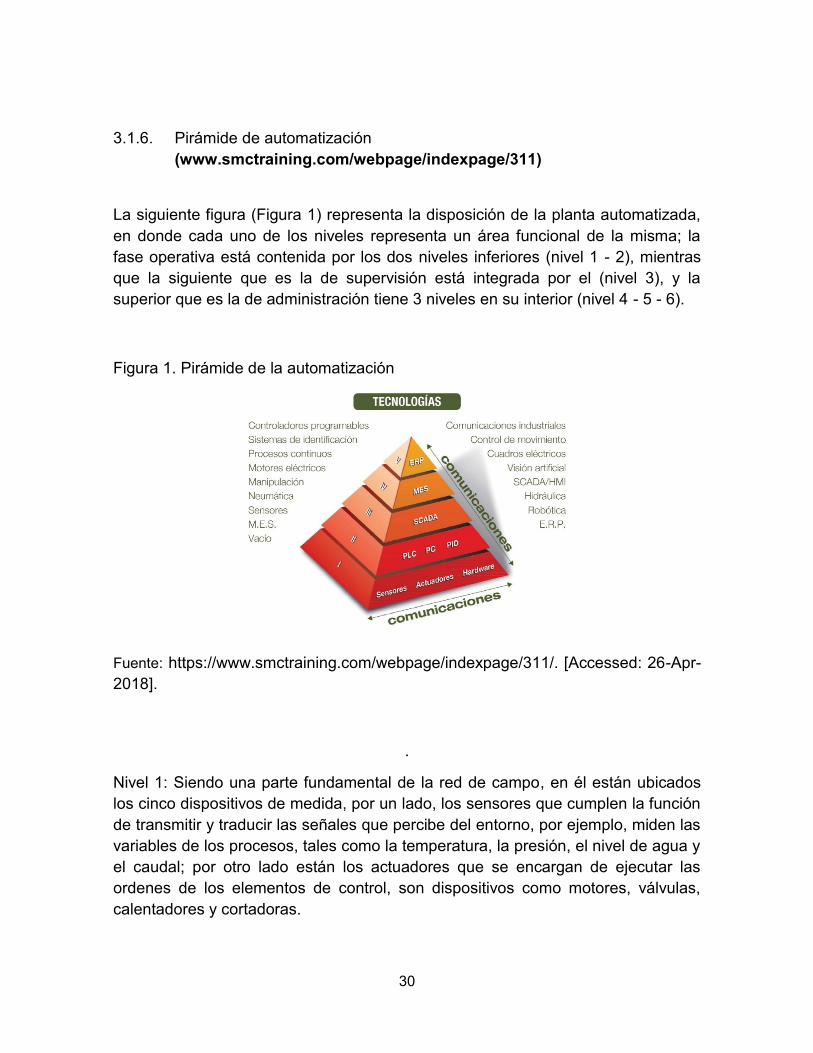
3.1.6. Pirámide de automatización
(www.smctraining.com/webpage/indexpage/311)
La siguiente figura (Figura 1) representa la disposición de la planta automatizada,
en donde cada uno de los niveles representa un área funcional de la misma; la
fase operativa está contenida por los dos niveles inferiores (nivel 1 - 2), mientras
que la siguiente que es la de supervisión está integrada por el (nivel 3), y la
superior que es la de administración tiene 3 niveles en su interior (nivel 4 - 5 - 6).
Figura 1. Pirámide de la automatización
Fuente: https://www.smctraining.com/webpage/indexpage/311/. [Accessed: 26-Apr-
2018].
.
Nivel 1: Siendo una parte fundamental de la red de campo, en él están ubicados
los cinco dispositivos de medida, por un lado, los sensores que cumplen la función
de transmitir y traducir las señales que percibe del entorno, por ejemplo, miden las
variables de los procesos, tales como la temperatura, la presión, el nivel de agua y
el caudal; por otro lado están los actuadores que se encargan de ejecutar las
ordenes de los elementos de control, son dispositivos como motores, válvulas,
calentadores y cortadoras.
31
Nivel 2: En él, están ubicados los controladores lógicos programables (PLC´s), los
cuales ocupan el nivel superior de la red de campo, siendo los encargados de
ordenar las acciones a los actuadores, al recibir la información de los distintos
sensores, por lo cual los dispositivos de este nivel permiten que los sensores y
actuadores funcionen de forma conjunta para realizar los procesos que estén a su
consideración.
Nivel 3: Hace parte de la fase de supervisión, el presente nivel pretende
monitorear por medio de una red de comunicación, todos los dispositivos de
control existentes dentro de la entidad; al estar constituidos por computadores o
sistemas de visualización tales como interfaces humanos – máquina (HMI). En
este nivel es posible visualizar como se están llevando a cabo los procesos en la
línea de producción, a través del control de supervisión y adquisición de datos o
SCADA, al ser un sistema basado en computadores que permite supervisar y
controlar variables de proceso a distancia, proporcionando comunicación con los
dispositivos de campo por medio de un software especializado, también provee de
la información que se genera en el proceso productivo a diversos usuarios, tanto
del mismo nivel como de otros usuarios dentro de la empresa (supervisión, control
calidad, control de producción, almacenamiento de datos, etc.).
Nivel 4: El sistema de control distribuido (DCS), forma parte vital de la fase
administrativa, al ser un sistema de control aplicado a entornos dinámicos, en
donde el sistema de los controladores está conectado mediante redes de
comunicación y de monitorización, para su vigilar y control.
Nivel 5: En este nivel se encuentra el sistema de ejecución de la manufactura
(MES), el cual dirige y monitoriza los procesos de producción en la planta,
incluyendo el trabajo manual o automático de informes.
Nivel 6: La planeación de los recursos empresariales (ERP), son los sistemas de
información gerenciales que integran y manejan muchos de los negocios
asociados con las operaciones de producción y de los aspectos de distribución de
una compañía, formando parte del nivel más superficial en una entidad. La
estructura piramidal descrita anteriormente, da un enfoque integrador, el cual
precisa la unificación de las células de automatización, en donde la comunicación
que exista entre cada una de ellas es de vital importancia para llevar a cabo un
excelente proceso automatizado, pese a la enorme demanda de información
manejada en todas las unidades funcionales de la empresa. Los niveles deben
estar interconectados entre sí, permitiendo controlar los tiempos de respuesta de
los dispositivos de control, los cuales deben ser cortos y deterministas, en donde
las perturbaciones clásicas del entorno han de poder ser soportadas sin que ello
afecte a la fiabilidad y disponibilidad de las instalaciones.
32
3.2. CELDAS DE MANUFACTURA FLEXIBLE
(https://prezi.com/xjfm6dcww0wd/sistema-de-produccion-por-celdas-de-
manufactura/)
Es cada vez más frecuente encontrar empresas, con un alto grado de
automatización, que utilizan celdas de manufactura en sus procesos de
fabricación. El uso de tales dispositivos les permite obtener altos grados de
eficiencia en la producción, mantener estándares elevados de calidad y la
capacidad de realizar, con rapidez, las modificaciones que requiere el proceso
productivo, para adecuarse a nuevas necesidades del mercado. Aunque se
pretende que una celda de manufactura permita adecuaciones eficientes; en la
realidad, la reprogramación de una celda es una labor delicada y compleja.
Adecuar una celda, para la fabricación de un nuevo producto, requiere de tiempo y
de personal especializado; además, la celda debe detenerse durante el tiempo
que dure la adecuación, interrumpiendo así el proceso productivo. La celda de
manufactura es un conjunto de componentes electromecánicos, que trabajan de
manera coordinada para el logro de un producto, y que además permiten la
fabricación en serie de dicho producto. Las celdas de manufactura son una
herramienta que han sido fuertemente utilizadas en las empresas que se
encuentran inmersas en la filosofía Lean.
En lo general, las celdas de manufactura flexible no son atendidas por humanos,
por lo que su diseño y operación deben ser más precisos que los de otras celdas.
Son importantes la selección de máquinas y robots incluyendo los tipos y
capacidades de efectores finales y de sus sistemas de control, para tener un
funcionamiento correcto de la celda. Se debe considerar la probabilidad de un
cambio apreciable en la demanda de familias de piezas, durante el diseño, para
asegurarse que el equipo implicado tenga la flexibilidad y la capacidad correctas.
Es un arreglo de gente, máquinas, materiales y métodos con los pasos de los
procesos puestos uno junto a otro a través del cual las partes son procesadas en
un flujo continuo en orden secuencial. Normalmente en forma de "U", permite el
flujo de una sola pieza y la asignación de personal de forma flexible mediante el
concepto de "multi - habilidades". Para reducir los tiempos de proceso y uso de
recursos, se trata de realizar las operaciones justo a tiempo (Just in Time), para lo
cual es necesario cambiar la disposición tradicional de máquinas similares
agrupadas en departamentos de proceso (troquelado, fresado, torneado, etc.) a
celdas de manufactura de forma en “U” integrando las maquinas, personal con
múltiples habilidades, herramentales, refacciones, materiales, componentes y
facilidades necesarias para fabricar una familia de productos por celda a través de
la tecnología de grupo.
33
3.2.1. Celdas de Manufactura en “U”
La celda en “U” permite que cada operador pueda comunicarse con los demás en
caso de problemas o que puedan ayudarse y cooperar en caso de atrasos, ya no
se responsabiliza a cada operador por una sola operación, sino más bien se
responsabiliza a todo el grupo de operadores por la celda para la cual deben tener
la habilidad de una diversidad de operaciones. Tanto los herramentales como las
refacciones deben tenerse a la mano para hacer cambios rápidos de modelo sin
necesidad de buscarlas en toda la planta.
De acuerdo con los pedidos de los clientes se debe balancear el trabajo de las
celdas de manufactura para que tengan una carga constante o producción lineal (a
través del tiempo “Tak” periodo con el que cuenta cada operación de la celda “U”
para realizar su actividad) de todas formas están diseñados para responder de
forma flexible a la demanda.
3.2.2. Simulación de una celda de manufactura
La simulación de una celda flexible de manufactura comprende el modelado de
elementos electromecánicos, que permite analizar los problemas de difícil solución
en el comportamiento de los componentes de la celda de manufactura, como los
siguientes:
- Flexibilidad: la celda se adapte a cambios en el ambiente, tales como la
incorporación de algún nuevo robot.
- Reconfigurabilidad: la celda manufacture diferentes productos.
- Tolerancia a fallas: la celda trabaje eficientemente, aun y cuando exista
alguna falla.
-
3.2.3. Ventajas y desventajas de celdas de manufactura (Claves, 2014)
- Una de las ventajas más importantes de la industria que trabaja con celdas
de manufactura para la producción, sin duda alguna es la simulación. Sin
embargo, la simulación computacional, aún no ha logrado resolver
eficientemente los problemas que presenta una celda de manufactura real.
- La distribución los puestos de trabajo y maquinaria en los procesos
productivos determinan fuertemente los resultados de este; una buena
distribución de los recursos productivos dará como resultado los volúmenes
34
de producción requeridos, con el cumplimiento de los requisitos
establecidos por el cliente y en el tiempo requerido.
- En vista de los cambios rápidos de la demanda del mercado y de la
necesidad de más variedad de productos en menores cantidades es muy
conveniente la flexibilidad de operaciones de manufactura. Las celdas de
manufactura pueden volverse flexibles al incorporar máquinas y centros de
maquinado con control numérico computarizado, y mediante robots
industriales u otros sistemas mecanizados de manejo de materiales.
- Cuando se utilizan celdas de manufactura la relevancia de los costos crea
una desventaja ya que al utilizar más maquinas herramienta aumenta el
costo de manufactura teniendo en cuenta que el mantenimiento adecuado
de las herramientas y de la maquinaria es esencial, al igual que la
implementación de funcionamiento de las celdas en dos o tres turnos.
4. METODOLOGÍA
Para la realización de este proyecto se desglosó su desarrollo en tres fases las
cuales pueden ser ejecutadas independientemente después de la búsqueda de
información o de la búsqueda de componentes que comprometan cada una de las
estaciones, previendo caer en el error de obstaculizar el desarrollo de sus
componentes, por medio de la integración de fuentes de información claras y con
la información ya realizada en el trabajo de grado del modelamiento de la celda de
manufactura FMS-200.
35
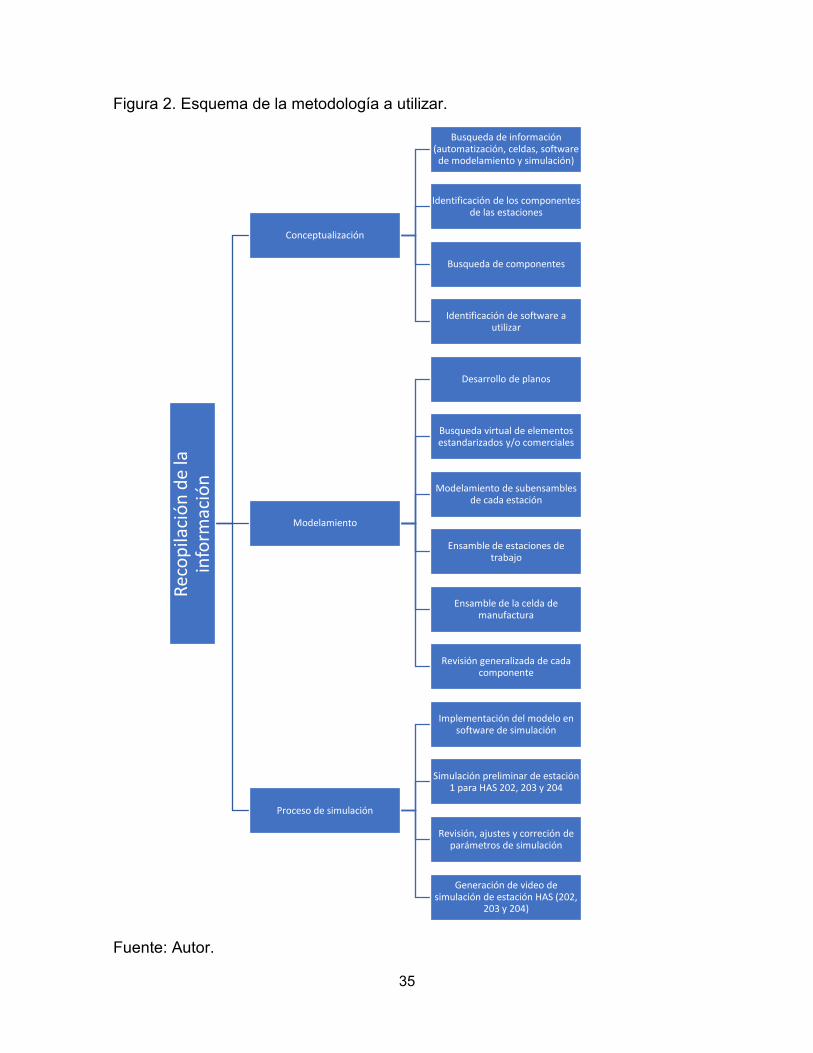
Figura 2. Esquema de la metodología a utilizar.
Fuente: Autor.
Rec
op
ilaci
ón
de
la
info
rmac
ión
Conceptualización
Busqueda de información (automatización, celdas, software de modelamiento y simulación)
Identificación de los componentes de las estaciones
Busqueda de componentes
Identificación de software a utilizar
Modelamiento
Desarrollo de planos
Busqueda virtual de elementos estandarizados y/o comerciales
Modelamiento de subensambles de cada estación
Ensamble de estaciones de trabajo
Ensamble de la celda de manufactura
Revisión generalizada de cada componente
Proceso de simulación
Implementación del modelo en software de simulación
Simulación preliminar de estación 1 para HAS 202, 203 y 204
Revisión, ajustes y correción de parámetros de simulación
Generación de video de simulación de estación HAS (202,
203 y 204)
36
4.1. CONCEPTUALIZACIÓN
4.1.1. Búsqueda de información
Esta parte pretende la búsqueda no solo de conceptos, investigaciones y métodos
técnicos que ayuden con el desarrollo de este proyecto, sino, además, la
búsqueda de modelos ya constituidos por las diferentes compañías fabricantes de
los dispositivos y partes o de proyectos en los que haya sido necesario el
levantamiento de planos de componentes que constituyen cada una de las
estaciones de la celda de manufactura.
Todo esto gracias a que las estaciones de la celda están construidas en su
mayoría con componentes estructurales normalizados, lo cual permite obtener las
bibliotecas requeridas para ser instaladas y adjuntadas en el software para
adecuada utilización en los modelos.
4.1.2. Identificación de los componentes de las estaciones
Debemos evaluar antes del levantamiento de planos cada uno de los
componentes de las estaciones que componen la celda de manufactura en cuanto
a sus especificaciones y referencias para la identificación de los diferentes
productos en la red.
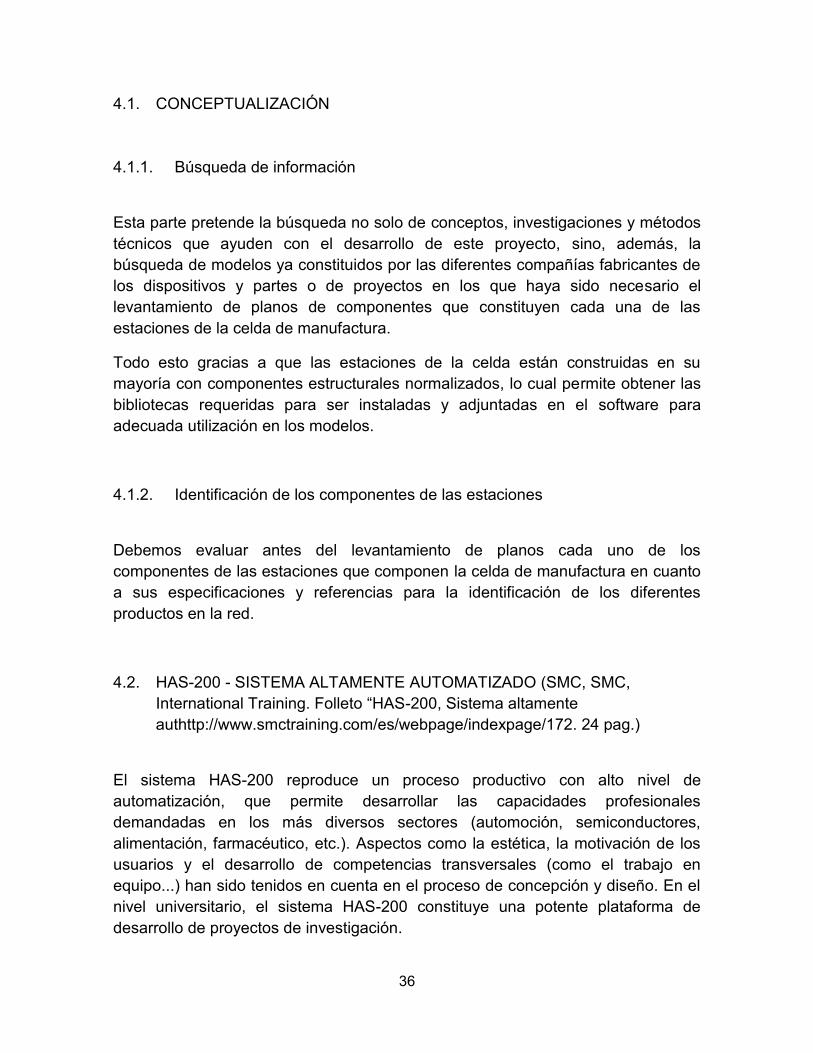
4.2. HAS-200 - SISTEMA ALTAMENTE AUTOMATIZADO (SMC, SMC,
International Training. Folleto “HAS-200, Sistema altamente
authttp://www.smctraining.com/es/webpage/indexpage/172. 24 pag.)
El sistema HAS-200 reproduce un proceso productivo con alto nivel de
automatización, que permite desarrollar las capacidades profesionales
demandadas en los más diversos sectores (automoción, semiconductores,
alimentación, farmacéutico, etc.). Aspectos como la estética, la motivación de los
usuarios y el desarrollo de competencias transversales (como el trabajo en
equipo...) han sido tenidos en cuenta en el proceso de concepción y diseño. En el
nivel universitario, el sistema HAS-200 constituye una potente plataforma de
desarrollo de proyectos de investigación.
37
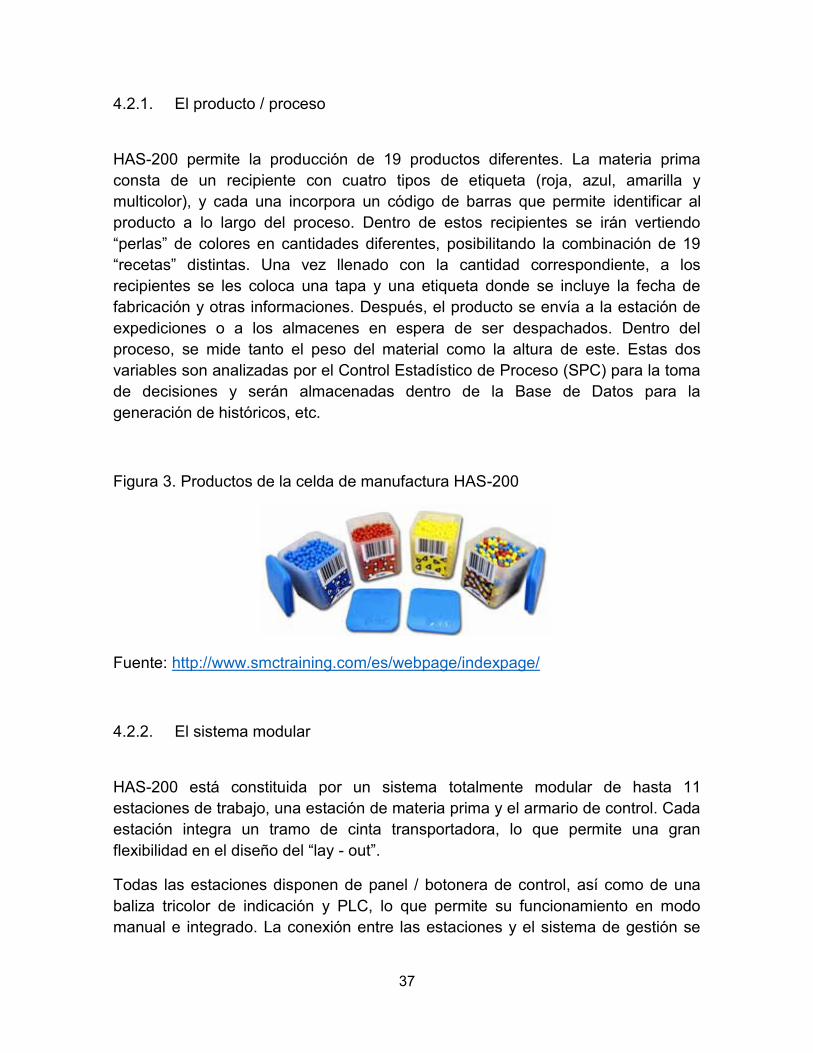
4.2.1. El producto / proceso
HAS-200 permite la producción de 19 productos diferentes. La materia prima
consta de un recipiente con cuatro tipos de etiqueta (roja, azul, amarilla y
multicolor), y cada una incorpora un código de barras que permite identificar al
producto a lo largo del proceso. Dentro de estos recipientes se irán vertiendo
“perlas” de colores en cantidades diferentes, posibilitando la combinación de 19
“recetas” distintas. Una vez llenado con la cantidad correspondiente, a los
recipientes se les coloca una tapa y una etiqueta donde se incluye la fecha de
fabricación y otras informaciones. Después, el producto se envía a la estación de
expediciones o a los almacenes en espera de ser despachados. Dentro del
proceso, se mide tanto el peso del material como la altura de este. Estas dos
variables son analizadas por el Control Estadístico de Proceso (SPC) para la toma
de decisiones y serán almacenadas dentro de la Base de Datos para la
generación de históricos, etc.
Figura 3. Productos de la celda de manufactura HAS-200
Fuente: http://www.smctraining.com/es/webpage/indexpage/
4.2.2. El sistema modular
HAS-200 está constituida por un sistema totalmente modular de hasta 11
estaciones de trabajo, una estación de materia prima y el armario de control. Cada
estación integra un tramo de cinta transportadora, lo que permite una gran
flexibilidad en el diseño del “lay - out”.
Todas las estaciones disponen de panel / botonera de control, así como de una
baliza tricolor de indicación y PLC, lo que permite su funcionamiento en modo
manual e integrado. La conexión entre las estaciones y el sistema de gestión se
38
realiza a través de una red Ethernet que posibilita gran velocidad en el flujo de
datos y estandarización a nivel mundial.
Cada una de las estaciones de HAS-200 lleva a cabo una parte del proceso.
4.2.2.1. HAS-201 - Alimentación de botes multicolor
Esta estación suministra al sistema recipientes vacíos de tipo multicolor para ser
llenados en las estaciones de producción. Los recipientes, almacenados en un
alimentador por gravedad, son extraídos del mismo mediante el empuje de un
cilindro y son trasladados hasta la cinta transportadora gracias a una serie de
actuadores neumáticos. Incluye el sistema de simulación de averías TROUB-200,
que permite generar hasta 16 disfunciones distintas que el usuario deberá
diagnosticar.
La Universidad Distrital - Francisco José de Caldas no cuenta con esta estación.
El alimentador de botes es de los denominados “tipo petaca” o alimentador de
gravedad. Esta denominación es debida al hecho de que los botes permanecen
almacenados unos encima de los otros, de forma que al alimentar el situado en la
parte inferior, el resto caen por su propio peso.
La operación de extraer el bote se realiza mediante un cilindro neumático (A) que
impulsa un empujador de forma adecuada al perfil del bote. Dos cilindros
posicionadores de distinta carrera (B&C) permiten que el alimentador se sitúe en
cada una de las cuatro posiciones posibles, de forma que la extracción de los
botes se haga por filas y se pueda así detectar mínimos (Dmin1) y falta de botes
(FM) mediante las dos fotocélulas de tipo barreras situadas en un lateral. El
alimentador formado por cuatro compartimentos contiguos almacena un total de
36 botes. Dicho alimentador se puede reemplazar fácilmente, una vez agotados
todos los recipientes, por uno nuevo que se encuentra en el almacén de materia
prima.
Además, el usuario dispondrá de una varilla metálica colgada en un lateral del
alimentador que impedirá mediante el cierre de la salida de los recipientes la caída
de éstos en el traslado del alimentador de una posición a otra.
39
Tolvas
La granza usada para llenar los botes está contenida en dos tolvas comunicadas
por un orificio interno en las paredes contiguas. La tolva grande dispone de un
cilindro de dos dedos que al activarse la electroválvula encierra una cantidad fija
de granza y al desactivarla provoca el desalojo de ésta al bote.
La tolva pequeña en cambio, tiene un cilindro que permanece abierto durante un
periodo de tiempo programado, y que permite realizar un ajuste fino de la medida
indicada. De esta forma el llenado de botes se realiza a partir de una pre - dosis
fija, y una cantidad variable en un intento de lograr la medida deseada. El nivel
mínimo de “perlas” se detecta mediante una fotocélula de fibra óptica (Dmin2)
situada en la tolva grande. La tolva es de acero inoxidable y dispone de una
ventana transparente que permite el control visual del nivel de “perlas”.
Desplazamiento del bote
Este bloque funcional consiste en varios actuadores neumáticos ensamblados
conjuntamente de manera que permita desplazar el bote a lo largo de la estación.
El primer actuador (G) realiza la función de desplazar el resto del mecanismo a lo
largo de la estación. En una posición el mecanismo podrá coger el bote extraído
del alimentador mientras que en la otra posición será capaz de rechazar el bote en
caso de considerarse como erróneo o por el contrario depositarlo en la cinta para
su puesta en circulación. Un bote se considerará erróneo cuando no se haya
identificado como un bote del tipo a los suministrados por la propia estación o bien
porque no haya sido identificado por el BCR como consecuencia de un
posicionamiento incorrecto en el container de botes.
El segundo actuador (D) dota al mecanismo de movimientos de subida bajada
para recoger el recipiente de su punto de partida y para alcanzar el nivel de la
cinta transportadora respectivamente. El tercero de los cilindros (E) permite girar el
cilindro neumático (F) orientado en el eje x 90º alcanzando así la posición de
recogida, rechazo y cinta.
Como elemento terminal en el cilindro (F) existe una plataforma de sujeción por
vacío que incluye dos ventosas telescópicas evitando las posibles desalineaciones
causadas.
La aspiración se logra mediante un eyector de vacío. El vacuostato (V) o sensor
de presión y vacío, proporciona una señal al PLC indicando que el bote ha sido
sujetado correctamente.
40
Cinta transportadora
Al igual que el resto de las estaciones, ésta incorpora un tramo de cinta
transportadora como parte del AMHS (Automated Material Handling System). Un
motor de corriente continua alimentado a partir de la fuente de alimentación
integrada en la estación se encarga de dar movimiento a la cinta. A continuación,
se muestran los distintos sensores con los que el usuario se va a encontrar a
ambos lados de la cinta transportadora.
DC1: Esta fotocélula de reflexión directa indica la presencia de un bote al
comienzo del tramo de la cinta.
J1-J2: Estos dos cilindros controlan el flujo de entrada de los botes a la estación
permitiendo el paso uno a uno.
BCR: El lector de códigos de barra o BCR permite identificar tanto los botes que
provienen del resto de las estaciones del sistema y que se encuentran circulando
por la cinta, como los que se extraen de la propia estación. La información es
transmitida al PLC por línea serie RS-232. Figura 7.
K: Este cilindro se encarga de permitir la circulación del recipiente una vez
identificado por el BCR.
M: Este cilindro es el encargado de rechazar un recipiente erróneo a la caja de
reciclaje situada en la estación. Un bote se considerará erróneo cuando no se
haya identificado como un bote del tipo a los suministrados por la propia estación
o bien porque no haya sido identificado por el BCR como consecuencia de un
posicionamiento incorrecto en el container de botes.
Otra posible razón es la de que el recipiente en cuestión se encuentre fuera de los
límites establecidos de peso, etc.
L: La función primordial de este cilindro es la de permitir el descenso del cilindro
anterior con el fin de bloquear la circulación de los recipientes.
DC2: Esta fotocélula de reflexión directa transmite una señal al PLC
comunicándole la existencia de una cola originada por botes de la siguiente
estación de manera que se paralice la extracción de nuevos botes desde la propia
estación con motivo de no aumentar la cola.
Báscula
Una de las características más destacable de estas estaciones es la posibilidad de
efectuar un control sobre la medida que se está realizando. Para ello se integra
una báscula de precisión equipada con una interface serie RS-232 para la salida

41
de datos al PLC. También dispone de un LCD para la visualización del usuario.
Durante el llenado de granza, el bote permanece sobre un plato inoxidable situado
en la tapa superior de la balanza. Existen una serie de instrucciones y
consideraciones a tener en cuenta por el usuario el cual deberá de aclarar en el
manual de usuario de la báscula.
Figura 4. Productos de la celda de manufactura HAS-200
Fuente: http://www.smctraining.com/es/webpage/indexpage/
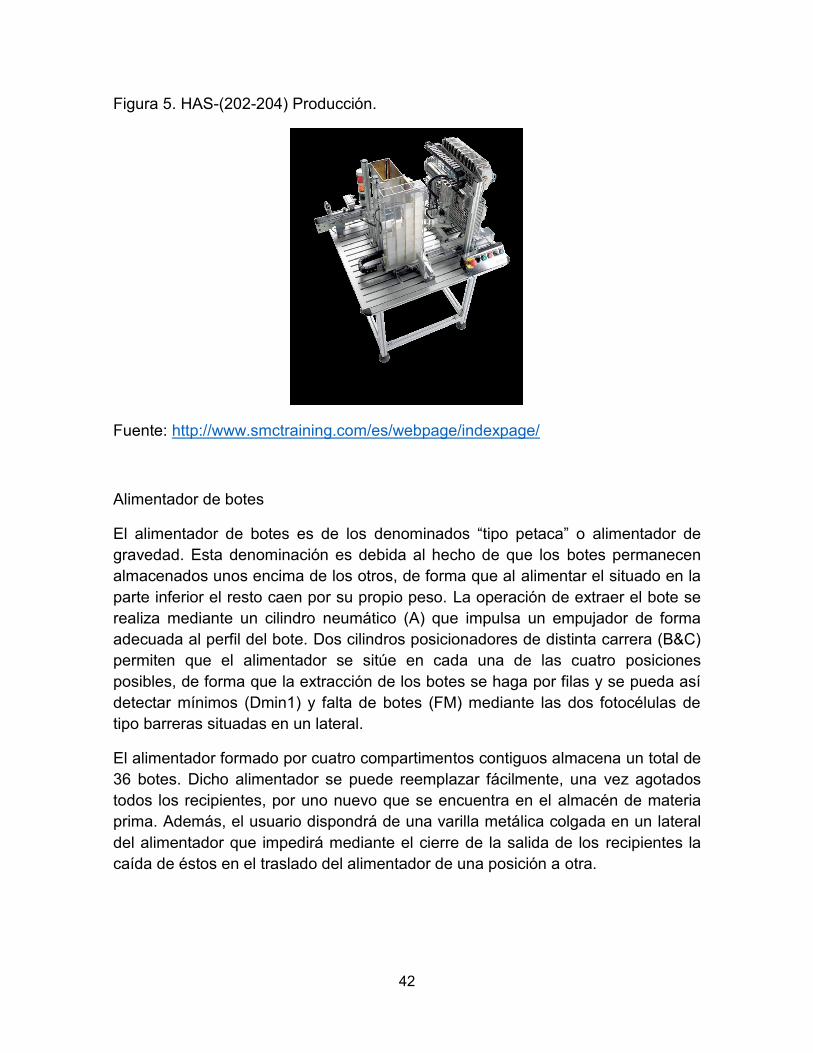
4.2.2.2. HAS-202, HAS-203 y HAS-204 – Producción
Las estaciones de producción permiten la alimentación, llenado y pesado de los
recipientes con los colores azul (HAS-202), amarillo (HAS-203) y rojo (HAS-204).
También posibilitan el llenado de los botes multicolor provenientes de la estación
HAS-201. Los recipientes, almacenados en un alimentador por gravedad, son
extraídos del mismo mediante el empuje de un cilindro. Se realiza el llenado de los
botes con la materia prima almacenada en las tolvas y posteriormente se trasladan
hasta la cinta transportadora. Estas estaciones disponen de báscula de precisión
equipada con interface RS-232 para la salida de datos al PLC y con display LCD
para la visualización del usuario.
42
Figura 5. HAS-(202-204) Producción.
Fuente: http://www.smctraining.com/es/webpage/indexpage/
Alimentador de botes
El alimentador de botes es de los denominados “tipo petaca” o alimentador de
gravedad. Esta denominación es debida al hecho de que los botes permanecen
almacenados unos encima de los otros, de forma que al alimentar el situado en la
parte inferior el resto caen por su propio peso. La operación de extraer el bote se
realiza mediante un cilindro neumático (A) que impulsa un empujador de forma
adecuada al perfil del bote. Dos cilindros posicionadores de distinta carrera (B&C)
permiten que el alimentador se sitúe en cada una de las cuatro posiciones
posibles, de forma que la extracción de los botes se haga por filas y se pueda así
detectar mínimos (Dmin1) y falta de botes (FM) mediante las dos fotocélulas de
tipo barreras situadas en un lateral.
El alimentador formado por cuatro compartimentos contiguos almacena un total de
36 botes. Dicho alimentador se puede reemplazar fácilmente, una vez agotados
todos los recipientes, por uno nuevo que se encuentra en el almacén de materia
prima. Además, el usuario dispondrá de una varilla metálica colgada en un lateral
del alimentador que impedirá mediante el cierre de la salida de los recipientes la
caída de éstos en el traslado del alimentador de una posición a otra.
43
Desplazamiento de los botes
Este bloque funcional consiste en varios actuadores neumáticos ensamblados
conjuntamente de manera que permita desplazar el bote a lo largo de la estación.
El primer actuador (G) realiza la función de desplazar el resto del mecanismo a lo
largo de la estación. En una posición el mecanismo podrá coger el bote extraído
del alimentador mientras que en la otra posición será capaz de rechazar el bote en
caso de considerarse como erróneo o por el contrario depositarlo en la cinta para
su puesta en circulación.
Un bote se considerará erróneo cuando no se haya identificado como un bote del
tipo a los suministrados por la propia estación o bien porque no haya sido
identificado por el BCR como consecuencia de un posicionamiento incorrecto en el
container de botes. El segundo actuador (D) dota al mecanismo de movimientos
de subida bajada para recoger el recipiente de su punto de partida y para alcanzar
el nivel de la cinta transportadora respectivamente. El tercero de los cilindros (E)
permite girar el cilindro neumático (F) orientado en el eje x 90º alcanzando así la
posición de recogida, rechazo y cinta.
Como elemento terminal en el cilindro (F) existe una plataforma de sujeción por
vacío que incluye dos ventosas telescópicas evitando las posibles desalineaciones
causadas. La aspiración se logra mediante un eyector de vacío. El vacuostato o
sensor de presión y vacío, proporciona una señal al PLC indicando que el bote ha
sido sujetado correctamente.
Cinta transportadora
Al igual que el resto de las estaciones, ésta incorpora un tramo de cinta
transportadora como parte del AMHS (Automated Material Handling System). Un
motor de corriente continua alimentado a partir de la fuente de alimentación
integrada en la estación se encarga de dar movimiento a la cinta. A continuación,
se muestran los distintos sensores con los que el usuario se va a encontrar a
ambos lados de la cinta transportadora.
DC1: Esta fotocélula de reflexión directa indica la presencia de un bote al
comienzo del tramo de la cinta.
J1-J2: Estos dos cilindros controlan el flujo de entrada de los botes a la estación
permitiendo el paso uno a uno.
BCR: El lector de códigos de barra o BCR permite identificar tanto los botes que
provienen del resto de las estaciones del sistema y que se encuentran circulando
por la cinta, como los que se extraen de la propia estación. La información es
transmitida al PLC por línea serie RS-232.
44
K: Este cilindro se encarga de permitir la circulación del recipiente una vez
identificado por el BCR.
M: Este cilindro es el encargado de rechazar un recipiente erróneo a la caja de
reciclaje situada en la estación. Un bote se considerará erróneo cuando no se
haya identificado como un bote del tipo a los suministrados por la propia estación
o bien porque no haya sido identificado por el BCR como consecuencia de un
posicionamiento incorrecto en el container de botes. Otra posible razón es la de
que el recipiente en cuestión se encuentre fuera de los límites establecidos de
peso, etc.
L: La función primordial de este cilindro es la de permitir el descenso del cilindro
anterior con el fin de bloquear la circulación de los recipientes.
DC2: Esta fotocélula de reflexión directa transmite una señal al PLC
comunicándole la existencia de una cola originada por botes de la siguiente
estación de manera que se paralice la extracción de nuevos botes desde la propia
estación con motivo de no aumentar la cola.
Báscula
Una de las características más destacable de estas estaciones es la posibilidad de
efectuar un control sobre la medida que se está realizando. Para ello se integra
una báscula de precisión equipada con una interface serie RS-232 para la salida
de datos al PLC. También dispone de un LCD para la visualización del usuario.
Durante el llenado de granza, el bote permanece sobre un plato inoxidable situado
en la tapa superior de la balanza. Existen una serie de instrucciones y
consideraciones a tener en cuenta por el usuario el cual deberá de aclarar en el
manual de usuario de la báscula.
4.2.2.3. HAS-205 y HAS-206 – Medición
Estas dos estaciones son las encargadas de medir la altura de la materia prima
contenida en los recipientes. Se distinguen entre ellas en el modo de realizar la
medición de la altura: una de ellas utiliza un encóder lineal (HAS-205), mientras
que la otra realiza la medición mediante un potenciómetro lineal (HAS-206) que
genera una medición analógica proporcional al desplazamiento. La concepción del
módulo permite el estudio de conceptos relacionados con los cuellos de botella,
control de calidad, buffers, control estadístico de procesos, etc.

45
Figura 6. Has-(205-206) Medición
Fuente: http://www.smctraining.com/es/webpage/indexpage/
Medición
El sistema de medición, situado al final del buffer, tiene como propósito realizar la
medida de altura de las “perlas” contenidas en el bote y enviar dicha información al
PLC. Dispone de un cilindro (E) cuya misión es la de retener el bote para permitir
la medida. A continuación, otro cilindro (F) desciende hasta alcanzar el nivel de
“perlas” contenidas en el recipiente. Ambas estaciones poseen un regulador de
presión con manómetro que reduce la fuerza ejercida del cilindro con palpador (F)
sobre la materia prima contenida en el bote con el fin de evitar un aplastamiento
de la misma o una ruptura del bote. Figura 6.
El pomo de regulación de presión con enclavamiento permite establecer la presión
deseada. En este caso, se fija la presión a un valor igual a 1.5 bares. La estación
cinco dispone de dos canales (CA-CB) que emiten pulsos proporcionales al
espacio recorrido. Se utiliza una tarjeta de contaje rápido o HSC (High Speed
Counter) como entrada de los pulsos emitidos por el encóder analógicas
proporcionales a la distancia recorrida. Esta estación se caracteriza por tener una
tarjeta Analógica que posibilita la entrada de señales controladas por tensión o por
corriente. En este caso el control se hace mediante tensión, en un rango de 0-10v.
Una vez realizada la medida el cilindro “E” cesa la retención del bote permitiendo
así que pueda ser transferido a la cinta transportadora nuevamente por el cilindro
46
“G” o por el contrario sea rechazado a la caja de desechos por considerarse un
bote erróneo al estar fuera de los límites de medida.
Buffer
Estas estaciones se caracterizan por tener un tramo de cinta denominado buffer
donde se almacenan todos los botes que requieren de un chequeo. La capacidad
de dicho buffer es de 4 botes, pero puede ser variada con el fin de que el usuario
pueda estudiar las consecuencias y comportamientos ante cuellos de botella, etc.
De igual modo que la cinta, dispone de un motor DC alimentado a partir de la
fuente de alimentación de la estación.
Al final del tramo se sitúan dos cilindros (D1-D2) controlados por una misma
electroválvula, que controlan el flujo de entrada de los botes al sistema de
medición. Además, dispone de una caja en la cual se recogen los botes que se
han considerado erróneos y como consecuencia se han desechado.
Conveyor Belt
Al igual que el resto de las estaciones, ésta incorpora un tramo de cinta
transportadora como parte del AMHS (Automated Material Handling System). Un
motor de corriente continua alimentado a partir de la fuente de alimentación
integrada en la estación se encarga de dar movimiento a la cinta. A continuación,
se muestran los distintos sensores con los que el usuario se va a encontrar a
ambos lados de la cinta transportadora.
A1-A2: Estos dos cilindros controlan el flujo de entrada de los botes a la estación
permitiendo el paso uno a uno.
BCR: El lector de códigos de barra o BCR permite identificar los botes que
provienen del resto de las estaciones del sistema y que se encuentran circulando
por la cinta. La información es transmitida al PLC por línea serie RS-232.
B: Permite dotar al cilindro “C” de movimientos de subida-bajada, según si el bote
va a pasar por el control de calidad o no.
C: Este cilindro se encarga de transferir el bote de la cinta transportadora al buffer
mediante un puente que unifica a la cinta y al buffer.
G: Este cilindro permite el traspaso del bote del buffer a la cinta mediante el vacio
realizado por la ventosa que se encuentra en uno de los extremos del cilindro.
V: Permite la aspiración del recipiente y su manipulación a la cinta transportadora.

47
DC: Esta fotocélula de reflexión directa transmite una señal al PLC comunicándole
la existencia de una cola originada por botes de la siguiente estación de manera
que se paralice la extracción de nuevos botes desde la propia estación con motivo
de no aumentar la cola.
4.2.2.4. HAS-207 - Colocación de la tapa
En esta estación se coloca la tapa en posición correcta y se imprime una etiqueta
con la fecha de fabricación y otras informaciones para identificar el producto final.
Las tapas son almacenadas en un alimentador por gravedad, del cual son
extraídas y colocadas sobre el bote. Una impresora realiza la impresión y
suministro de etiquetas para colocarlas en la parte superior de la tapa una vez
cerrado el recipiente. En dicha etiqueta, el usuario puede personalizar por medio
del programa del PLC el tipo de leyenda a imprimir (fecha, caducidad, etc.).
Figura 7. HAS-207 Colocación de la tapa.
Fuente: http://www.smctraining.com/es/webpage/indexpage/
Esta estación se encarga de almacenar los botes para su posterior expedición o
recirculación, según si se trata de un bote elaborado o semielaborado. El almacén
tiene la capacidad de albergar 81 botes dispuestos en celdas verticales y unitarias.
48
La división de estas posiciones se lleva a cabo en dos paneles de dimensiones
diferentes, uno de 9x4 y el otro de 9x5. Figura 7.
La estación se basa en un sistema con dos ejes eléctricos servocontrolados que
permiten el almacenamiento en cualquiera de las 81 posibles celdas. Dispone de
un terminal de operador o HMI para facilitar la interface con el usuario.
Almacén
El presente bloque funcional está compuesto por dos ejes eléctricos controlados
por servomotores Brushless, modelo SMC LJ. Estos dos ejes eléctricos permiten
alcanzar las 81 posiciones situadas a ambos lados del actuador horizontal (X).
Unido a éste se encuentra el actuador vertical (Y), el cual integra la unidad de
recogida y posicionamiento. Esta unidad consiste en un mecanismo formado por
dos actuadores neumáticos, uno de ellos (A) permite el giro en 180º de manera
que se pueda acceder a ambos paneles de almacenamiento.
El segundo integrante (B) en dicho mecanismo desempeña los movimientos de
avance-retroceso para permitir tanto la evacuación de un recipiente de la celda
como el almacenamiento en una de ellas, mediante una ventosa (V) que permite la
fijación del bote en su traslado a la cinta o a la celda correspondiente. Ambos
actuadores eléctricos son controlados mediante los dos drivers conectados al
PLC.
4.2.2.5. HAS-208 - Almacén vertical
Compuesto por dos ejes eléctricos servocontrolados, este almacén permite ubicar
hasta 81 recipientes, bien como producto terminado o como semielaborado.
Dispone de un terminal operador (HMI) para facilitar el interfaz con el usuario. Éste
permitirá realizar en modo manual las gestiones de movimiento de los recipientes
dentro de las diferentes celdas, su traslado a la cinta de transporte, la visualización
del almacén, etc. Esta estación reproduce de forma fiel un sistema industrial de
almacenamiento automatizado.

49
Figura 8. HAS-208 Almacen vertical
Fuente: http://www.smctraining.com/es/webpage/indexpage/
Esta estación es la responsable de suministrar tapas a todos aquellos recipientes
que las requieran y de imprimir la etiqueta correspondiente con el número de lote,
fecha, etc. para identificar el producto final. Además de suministrar se hace cargo
de las funciones de colocación de ambas, tapa y etiqueta
Alimentación de tapas
Este bloque funcional realiza las tareas de suministrar las tapas y rechazarlas en
caso de que no se encuentren en la posición de su posterior colocación, puede ser
el caso, estar dada la vuelta. “tipo petaca” o alimentador de gravedad. Esta
denominación es debida al hecho de que las tapas permanecen almacenadas
unas encima de las otras, de manera que al alimentar la situada en la parte inferior
el resto caen por su propio peso. La operación de extraer las tapas se realiza
mediante un cilindro neumático (A) que impulsa un empujador de forma adecuada
al perfil de la base. Un cilindro de simple efecto (I) se encargará de desechar las
tapas incorrectas. El cargador de tapas se encuentra amarrado a la camisa de un
actuador (B) de forma que se extraiga una tapa de la columna correspondiente al
posicionamiento del cilindro y se detecte con previo aviso la falta de tapas
mediante la fotocélula (DMIN) de tipo barrera situada en el lateral del cargador.
Cuando el alimentador se encuentre fuera de existencias será necesario traer un
nuevo alimentador del almacén de materia prima, estación#1.
Manipulador
50
Este manipulador consta de una unidad lineal (C) de vástagos paralelos
caracterizado por poseer dos cilindros en un mismo cuerpo. Unidos a la camisa de
éste se encuentran otros dos actuadores neumáticos situados uno en cada
extremo. Uno de los actuadores (E) se encarga de aspirar la pegatina impresa
mediante las tres ventosas (V2) planas y sin nervios situadas en la extremidad y el
otro (D) de aspirar la tapa también mediante una ventosa (V1) situada entre dos
placas que permiten que la sujeción de la tapa sea la correcta para un encaje
posterior de esta en el bote. Cada uno de los cilindros detallados arriba son
controlados por electroválvulas e incorporan detectores magnéticos que permiten
conocer la posición de los mismos en cada momento.
Impresora
La principal característica de esta estación es la presencia de una impresora que
suministra etiquetas con el número de lote y fecha de fabricación fija. La etiqueta,
que se adhiere a la parte superior de la tapa, tiene unas dimensiones de 40x25
mm. Un conector tipo D permite la entrada de datos desde el PLC mediante línea
serie RS-232. En caso de duda consulte al correspondiente manual de usuario
Cinta Transportadora
Al igual que el resto de las estaciones, ésta incorpora un tramo de cinta
transportadora como parte del AMHS (Automated Material Handling System). Un
motor de corriente continua alimentado a partir de la fuente de alimentación
integrada en la estación se encarga de dar movimiento a la cinta. A continuación,
se muestran los distintos sensores con los que el usuario se va a encontrar a
ambos lados de la cinta transportadora.
F1-F2: Estos dos cilindros controlan el flujo de entrada de los botes a la estación
permitiendo el paso uno a uno.
BCR: El lector de códigos de barra o BCR permite identificar los botes que
provienen del resto de las estaciones del sistema y que se encuentran circulando
por la cinta. La información es transmitida al PLC por línea serie RS-232.
G: Permite dotar al cilindro “H” de movimientos de subida-bajada dependiendo de
si el bote debe ser tapado y etiquetado o no.
H: Este cilindro desempeña la función de colocar nuevamente el bote en
circulación una vez se le ha colocado la tapa y adherido la pegatina.
V3: Situada en el extremo del cilindro “H” permite manipular por vacío el bote de
su ubicación de colocación de tapa y pegatina a la cinta transportadora.
51
DC: Esta fotocélula de reflexión directa transmite una señal al PLC comunicándole
la existencia de una cola originada por botes de la siguiente estación de manera
que se paralice la extracción de nuevos botes desde la propia estación con motivo
de no aumentar la cola. Esta estación se encarga de almacenar los botes para su
posterior expedición o recirculación, según si se trata de un bote elaborado o
semielaborado. Botes dispuestos en 8 filas y 7 columnas completan la superficie
de almacenaje de la estación, siendo, por tanto, la capacidad máxima de
almacenaje de 56 botes. Figura 16
La estación se basa en un sistema con dos ejes eléctricos, uno de ellos
servocontrolado y el otro con motor paso a paso que permiten el almacenamiento
en cualquiera de las 56 posibles celdas. Dispone de un terminal de operador o
HMI para facilitar la interface con el usuario.
Almacén
El presente bloque funcional está compuesto por dos actuadores eléctricos.
Mientras que uno de ellos es controlado mediante un servomotor brushless
modelo SMC LJ el otro es controlado mediante un motor paso a paso modelo
SMC LX. Es por estos actuadores eléctricos por lo que es posible alcanzar cada
una de las 56 posiciones de que consta el almacén.
El actuador orientado en el eje X permite al sistema realizar movimientos a lo largo
de las ocho columnas. Acoplado a este se encuentra el otro actuador eléctrico (Y)
que permite avanzar al conjunto a lo largo de las distintas filas. La unidad de
recogida, acoplada al eje Y, está formada por un cilindro (A) y una pinza
neumática (B) de manera que el conjunto posibilite la recogida del bote de la cinta
transportadora y su posterior almacenamiento en los distintos niveles de altura
presentes entre la cinta y la superficie de almacenaje. Los actuadores eléctricos
son controlados por drivers.
Cinta Transportadora
Al igual que el resto de las estaciones, ésta incorpora un tramo de cinta
transportadora como parte del AMHS (Automated Material Handling System). Un
motor de corriente continua alimentado a partir de la fuente de alimentación
integrada en la estación se encarga de dar movimiento a la cinta. A continuación,
se muestran los distintos sensores con los que el usuario se va a encontrar a
ambos lados de la cinta transportadora:
C1-C2: Estos dos cilindros controlan el flujo de entrada de los botes a la estación
permitiendo el paso uno a uno.
52
BCR: El lector de códigos de barra o BCR permite identificar los botes que
provienen del resto de las estaciones del sistema y que se encuentran circulando
por la cinta.
D: Su función es la de detener el bote cuando se dispone a manipularlo para su
posterior ubicación en una celda o para facilitar la puesta en circulación de un bote
almacenado.
DC: Esta fotocélula de reflexión directa transmite una señal al PLC comunicándole
la existencia de una cola originada por botes de la siguiente estación de manera
que se paralice la extracción de nuevos botes desde la propia estación con motivo
de no aumentar la cola.
4.2.2.6. HAS-209 - Almacén horizontal
Cuenta con un eje eléctrico servocontrolado y otro accionado con motor paso-
paso. Permite almacenar hasta 56 recipientes, tanto de producto terminado como
de semielaborados. Dispone de un terminal de operador (HMI) para facilitar el
interfaz con el usuario. Éste permitirá realizar en modo manual las gestiones de
movimiento de los recipientes dentro de las diferentes celdas, su traslado a la cinta
de transporte, la visualización del almacén, etc.

53
Figura 9. HAS-209 Almacen horizontal.
Fuente: http://www.smctraining.com/es/webpage/indexpage/
4.2.2.7. HAS-210 – Paletizado
Esta estación realiza la función de retirada del proceso de producto final,
ubicándolo en dos rampas de paletizado y expedición. El producto final se agrupa
en bloques de cuatro unidades, despachando los mismos una vez completo dicho
lote. Incluye el sistema de simulación de averías TROUB-200, que permite generar
hasta 16 disfunciones distintas que el usuario deberá diagnosticar.

54
Figura 10. HAS-210 Paletizado.
Fuente: http://www.smctraining.com/es/webpage/indexpage/
Manipulador
El manipulador de esta estación está formado por dos cilindros neumáticos
dispuestos en dos ejes de coordenadas. El traslado del bote a la plataforma se
realiza mediante el vacío que detecta la ventosa situada en uno de los cilindros.
Plataforma
La plataforma está dividida en dos carriles de manera que se puedan ir
almacenando conjuntamente botes de dos tipos distintos de lotes de producción.
La selección del carril se hace gracias al movimiento lateral que genera la
activación de la electroválvula de un cilindro neumático (E) sobre el que se
encuentra amarrada la plataforma. Los botes se depositan al comienzo del carril y
mediante un mecanismo formado por un cilindro neumático (F) y un giro trasero
los botes deslizan situándose uno tras otro. El vástago del mini cilindro (H&G) de
doble efecto situado al final de cada carril cierra el paso a la evacuación de los
botes a la rampa de salida.
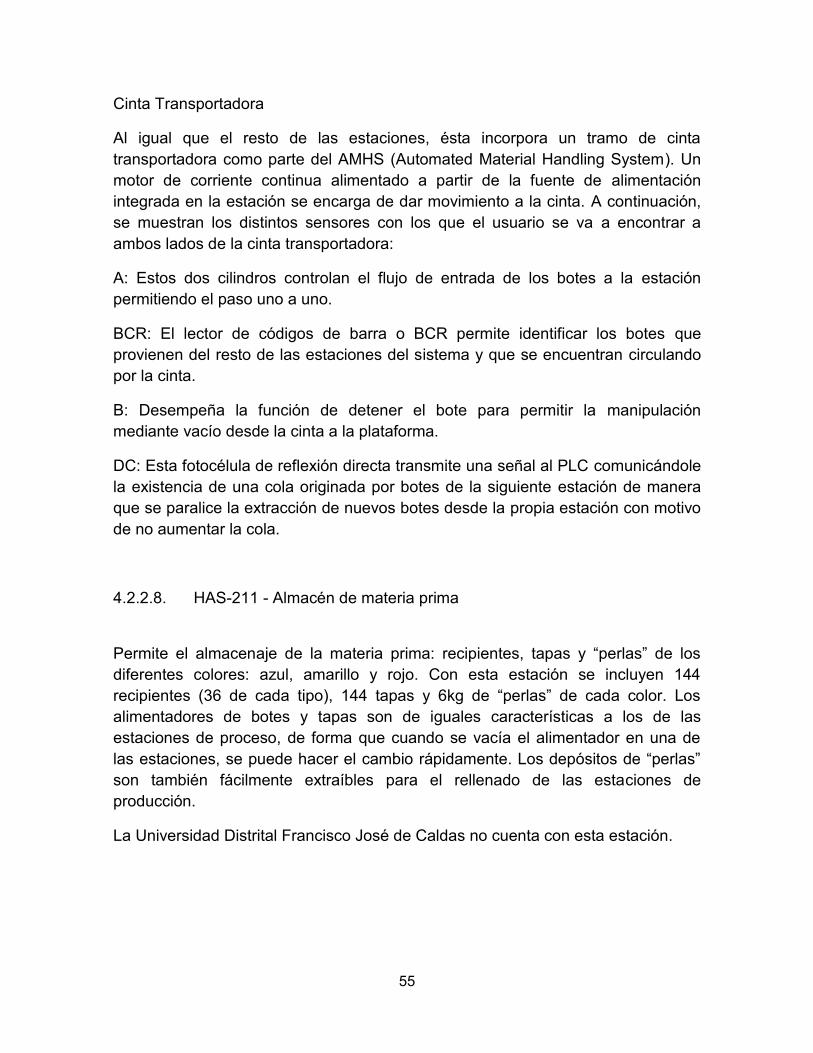
55
Cinta Transportadora
Al igual que el resto de las estaciones, ésta incorpora un tramo de cinta
transportadora como parte del AMHS (Automated Material Handling System). Un
motor de corriente continua alimentado a partir de la fuente de alimentación
integrada en la estación se encarga de dar movimiento a la cinta. A continuación,
se muestran los distintos sensores con los que el usuario se va a encontrar a
ambos lados de la cinta transportadora:
A: Estos dos cilindros controlan el flujo de entrada de los botes a la estación
permitiendo el paso uno a uno.
BCR: El lector de códigos de barra o BCR permite identificar los botes que
provienen del resto de las estaciones del sistema y que se encuentran circulando
por la cinta.
B: Desempeña la función de detener el bote para permitir la manipulación
mediante vacío desde la cinta a la plataforma.
DC: Esta fotocélula de reflexión directa transmite una señal al PLC comunicándole
la existencia de una cola originada por botes de la siguiente estación de manera
que se paralice la extracción de nuevos botes desde la propia estación con motivo
de no aumentar la cola.
4.2.2.8. HAS-211 - Almacén de materia prima
Permite el almacenaje de la materia prima: recipientes, tapas y “perlas” de los
diferentes colores: azul, amarillo y rojo. Con esta estación se incluyen 144
recipientes (36 de cada tipo), 144 tapas y 6kg de “perlas” de cada color. Los
alimentadores de botes y tapas son de iguales características a los de las
estaciones de proceso, de forma que cuando se vacía el alimentador en una de
las estaciones, se puede hacer el cambio rápidamente. Los depósitos de “perlas”
son también fácilmente extraíbles para el rellenado de las estaciones de
producción.
La Universidad Distrital Francisco José de Caldas no cuenta con esta estación.
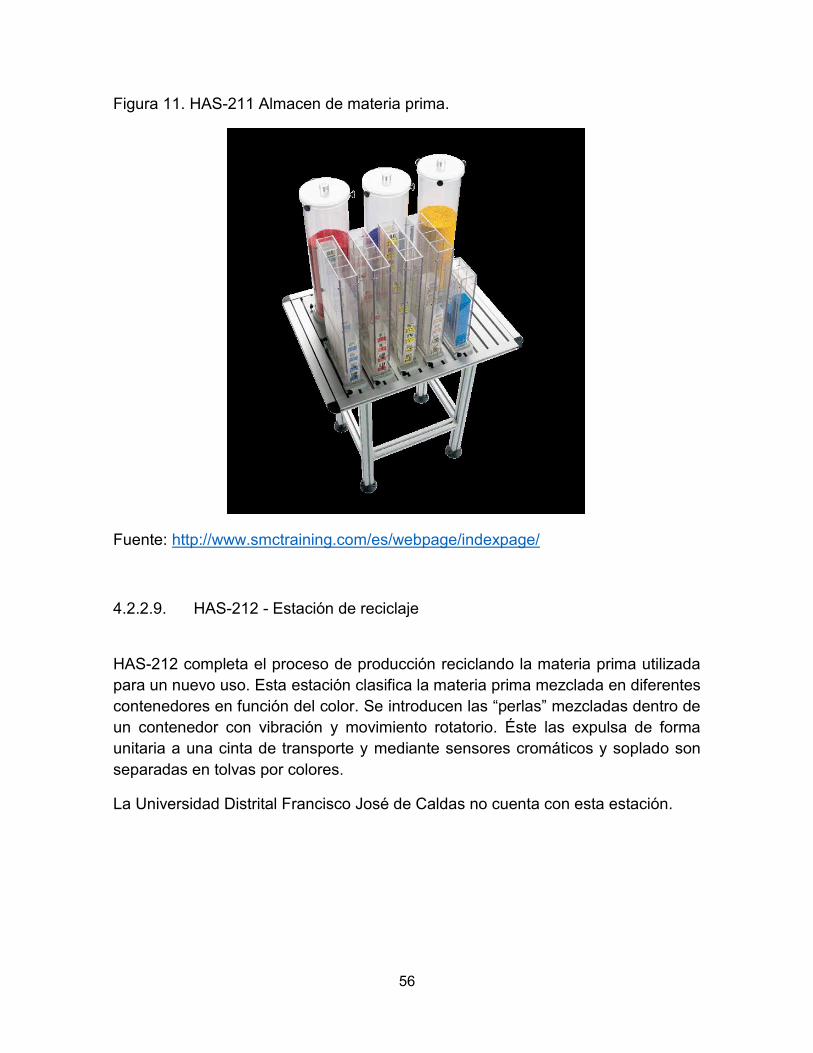
56
Figura 11. HAS-211 Almacen de materia prima.
Fuente: http://www.smctraining.com/es/webpage/indexpage/
4.2.2.9. HAS-212 - Estación de reciclaje
HAS-212 completa el proceso de producción reciclando la materia prima utilizada
para un nuevo uso. Esta estación clasifica la materia prima mezclada en diferentes
contenedores en función del color. Se introducen las “perlas” mezcladas dentro de
un contenedor con vibración y movimiento rotatorio. Éste las expulsa de forma
unitaria a una cinta de transporte y mediante sensores cromáticos y soplado son
separadas en tolvas por colores.
La Universidad Distrital Francisco José de Caldas no cuenta con esta estación.
57
Figura 12. HAS-212 Almacen de reciclado.
Fuente: http://www.smctraining.com/es/webpage/indexpage/
4.3. DISEÑO ASISTIDO POR COMPUTADORA
CAD/CAM (diseño asistido por computadora y manufactura asistida por
computadora) hacen referencia al software que se utiliza para diseñar y fabricar
productos.
CAD consiste en usar las tecnologías informáticas para el diseño y la
documentación de diseño. Las aplicaciones CAD/CAM se utilizan para diseñar un
producto y para programar los procesos de manufactura, especialmente el
mecanizado por CNC. El software CAM usa los modelos y ensamblajes creados
en el software CAD para generar trayectorias de herramientas que dirijan las
máquinas encargadas de convertir los diseños en piezas físicas. El software
CAD/CAM se utiliza generalmente para maquinado de prototipos y piezas
terminadas.
El diseño asistido por computadora nos muestra el proceso completo de
fabricación de un determinado producto con todas y cada una de sus
características como tamaño, contorno, etc. Todo esto se graba en la
computadora en dibujos bidimensionales o tridimensionales. Estos dibujos o
diseños se guardan en la computadora, así, el diseñador puede con posterioridad
58
mejorarlos, o compartirlos con otros para perfeccionarlos. La fabricación de
productos por medio del diseño asistido por computadora tiene muchas ventajas
respecto a la fabricación con operarios humanos. Entre estas están la reducción
de coste de mano de obra, o la eliminación de errores humanos.
También en la computadora se simula en funcionamiento de un determinado
producto, se comprueba por ejemplo en un engranaje cual son sus puntos de
fricción críticos y poder corregirlos. Con el diseño asistido por computadora se
puede fabricar productos complejos que serían prácticamente imposibles de
realizar por el ser humano. Se estima que en un futuro se eliminar por completo la
fabricación de costosos simuladores, ya que todo será comprobado por el diseño
asistido por computadora.
4.3.1. Búsqueda de componentes
Como se mencionó anteriormente las estaciones están fabricadas con perfiles y
elementos mecánicos normalizados lo que nos permite utilizar varias páginas de
descarga de modelos en extensiones de amplia transferibilidad para archivos
CAD, por otra parte se cuentan con los planos básicos de montaje en donde se
aprecian en isometría los ensambles y subensambles de las estaciones, adicional
a eso vienen relacionados con su respectivo listado de partes lo cual agiliza la
identificación de los componentes.
La universidad cuenta información sobre las celdas la cual fue suministrada por el
proveedor en su momento y que se encuentra en medio magnético a la cual
pudimos tener acceso; dentro de esta información se encuentran algunas
imágenes, software de la celda (KEPServerEx5), herramientas de programación
para PLC’s, y SCADA.
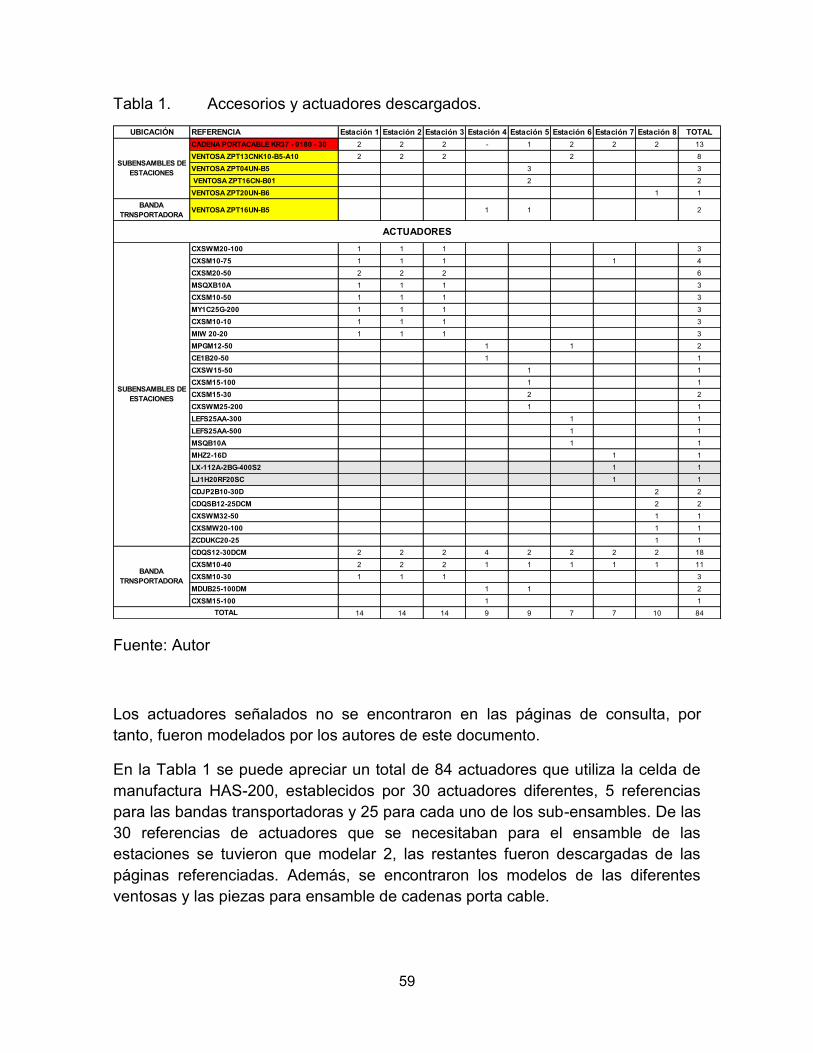
59
Tabla 1. Accesorios y actuadores descargados.
Fuente: Autor
Los actuadores señalados no se encontraron en las páginas de consulta, por
tanto, fueron modelados por los autores de este documento.
En la Tabla 1 se puede apreciar un total de 84 actuadores que utiliza la celda de
manufactura HAS-200, establecidos por 30 actuadores diferentes, 5 referencias
para las bandas transportadoras y 25 para cada uno de los sub-ensambles. De las
30 referencias de actuadores que se necesitaban para el ensamble de las
estaciones se tuvieron que modelar 2, las restantes fueron descargadas de las
páginas referenciadas. Además, se encontraron los modelos de las diferentes
ventosas y las piezas para ensamble de cadenas porta cable.
UBICACIÓN REFERENCIA Estación 1 Estación 2 Estación 3 Estación 4 Estación 5 Estación 6 Estación 7 Estación 8 TOTAL
CADENA PORTACABLE KR37 - 0180 - 30 2 2 2 - 1 2 2 2 13
VENTOSA ZPT13CNK10-B5-A10 2 2 2 2 8
VENTOSA ZPT04UN-B5 3 3
VENTOSA ZPT16CN-B01 2 2
VENTOSA ZPT20UN-B6 1 1
BANDA
TRNSPORTADORAVENTOSA ZPT16UN-B5 1 1 2
CXSWM20-100 1 1 1 3
CXSM10-75 1 1 1 1 4
CXSM20-50 2 2 2 6
MSQXB10A 1 1 1 3
CXSM10-50 1 1 1 3
MY1C25G-200 1 1 1 3
CXSM10-10 1 1 1 3
MIW 20-20 1 1 1 3
MPGM12-50 1 1 2
CE1B20-50 1 1
CXSW15-50 1 1
CXSM15-100 1 1
CXSM15-30 2 2
CXSWM25-200 1 1
LEFS25AA-300 1 1
LEFS25AA-500 1 1
MSQB10A 1 1
MHZ2-16D 1 1
LX-112A-2BG-400S2 1 1
LJ1H20RF20SC 1 1
CDJP2B10-30D 2 2
CDQSB12-25DCM 2 2
CXSWM32-50 1 1
CXSMW20-100 1 1
ZCDUKC20-25 1 1
CDQS12-30DCM 2 2 2 4 2 2 2 2 18
CXSM10-40 2 2 2 1 1 1 1 1 11
CXSM10-30 1 1 1 3
MDUB25-100DM 1 1 2
CXSM15-100 1 1
14 14 14 9 9 7 7 10 84
BANDA
TRNSPORTADORA
TOTAL
SUBENSAMBLES DE
ESTACIONES
SUBENSAMBLES DE
ESTACIONES
ACTUADORES
60
Sin embargo, al tomar como guía los planos que fueron suministrados a la
Universidad con el producto, encontramos diferencias en comparación con la
celda de manufactura instalada en el laboratorio de automatización.
En la estación 6, almacén vertical, se halló en los planos de referencia
suministrados por la compañía constructora SMC actuadores magnéticos de la
serie LEFS. El actuador que desplaza los recipientes horizontalmente, se encontró
referenciado como LEFS 25AA-500 y el que los desplaza verticalmente, se
evidencia en estos planos como LEFS16AA-300. Al revisar esta estación en el
laboratorio de la Universidad, se tuvo que este último no es el referenciado en los
planos suministrados, la cifra 16 en la serie de este actuador representa el ancho
del dispositivo, allí se encuentra un actuador de 25mm es decir un LEFS 25AA-
300.
Un caso más particular se evaluó para la siguiente estación, el almacén horizontal,
en donde en los planos de SMC se aprecian actuadores de la serie LEFS para la
realización de los desplazamientos del recipiente en el plano particular de este tipo
de almacén. Situándonos frente a la estación se tienen dos desplazamientos
principales, y aquí, los actuadores LEFS25AA-500 para los movimientos de
izquierda a derecha y viceversa; y el actuador LEFS16A-400 para los
desplazamientos adelante y atrás. En el laboratorio se encontró que estos
actuadores eran mucho más robustos que los referenciados y que, además, no se
pudieron encontrar datos específicos en las páginas de descarga de modelos en
3D, por tanto, se tuvieron que descargar catálogos de medidas generalizadas para
su modelamiento, así como el análisis de mecanismos de funcionamiento. En la
tabla se pueden apreciar los actuadores reales, (actuadores subrayados de gris),
donde, para desplazamientos de izquierda a derecha, se tiene un actuador de
referencia LJ1H20RF20SC y el desplazamiento hacia adelante y atrás lo realiza
un actuador de referencia LX-112A-2BG-400S2, ambos con mecanismo de tornillo
sinfín y encóder.
4.3.2. Identificación de software a utilizar
En el mercado se encuentra una amplia gama de compañías que desarrollan
software de diseño asistido por computador el cual se implementa en gran
variedad de procesos.
Es claro entender los múltiples formatos en los que suele encontrarse información
del tipo de modelamiento de partes y componentes es por esta razón que
61
Autodesk ofrece las mejores alternativas para la realización de este proyecto,
gracias a la variedad de formatos y características de transformación que son de
nuestro interés. También se utilizó Solidworks 2017® y Siemens NX 11® los
cuales hacen parte de la gama de licencias que posee la Universidad, dando así la
posibilidad de desarrollar partes del proyecto de acuerdo a la versatilidad que tiene
cada programa.
Con respecto a Solidworks® se utilizó la versión 2017 ya que ofrece una interfaz
dinámica para el modelado y además los centros de descarga de modelos utilizan
la extensión de este programa ya que su uso se ha masificado.
Al ser software de enfoque especializado en modelamiento avanzado posee una
serie de herramientas especializadas para el diseño mecánico, por ejemplo,
herramientas que permiten la generación de moldes a partir de un sólido
preconcebido para tal fin dando como resultado un modelo con ajustes
dimensionales parametrizados bajo las directrices que conciernen este cálculo y
teniendo en cuenta aspectos normativos. De acuerdo con esto, utilizando otros
paquetes de herramientas se pueden hacer modelos que hacen parte del
proyecto, tales como los entornos de modelado de estructuras con perfiles
estándar y juntas pernadas; para los ensambles es muy interactivo porque
presenta buenos efectos visuales que mejoran la precisión optimizando y
simplificando esta parte.
Figura 13. Software Solid Works® utilizado para el modelamiento de la celda de manufactura HAS 200.
Fuente:
https://www.facebook.com/Dibujosmecanicos/photos/pcb.1554777171268088/155
4776257934846/?type=3&theater
62
Se decidió usar el software Siemens NX® porque es una poderosa herramienta de
desarrollo tecnológico de alta gama por su diversidad de entornos los cuales están
dispuestos para generar productos de ingeniería llevando una línea secuencial de
pautas desde la conceptualización hasta su materialización según sea el caso con
un alto nivel de precisión. Como su evolución pasó a manos de esta gran
compañía el software mejoró mucho porque se optimizó para la industria y en
especial en el desarrollo ingenieril integrando herramientas dinámicas de
simulación que agilizan resultados y aumentan la eficiencia.
Figura 14. Software NX de Siemens® utilizado para la simulación del modelo de la estación 1 de la celda de manufactura HAS200.
Fuente: http://plm.grupro.com.ar/courses/curso-inicial-nx-cad/
4.4. MODELADO
Por medio de la consulta de la información obtenida se procede a esquematizar la
celda comprendiendo su conformación para dar inicio con la identificación
detallada de las estaciones con sus componentes, como son numerosos y muy
detallados una forma de simplificar un poco es seleccionando con antelación todos
los elementos normalizados o de carácter comercial acudir a los centros de
descarga de modelos CAD e incluso en la página del fabricante de la celda que
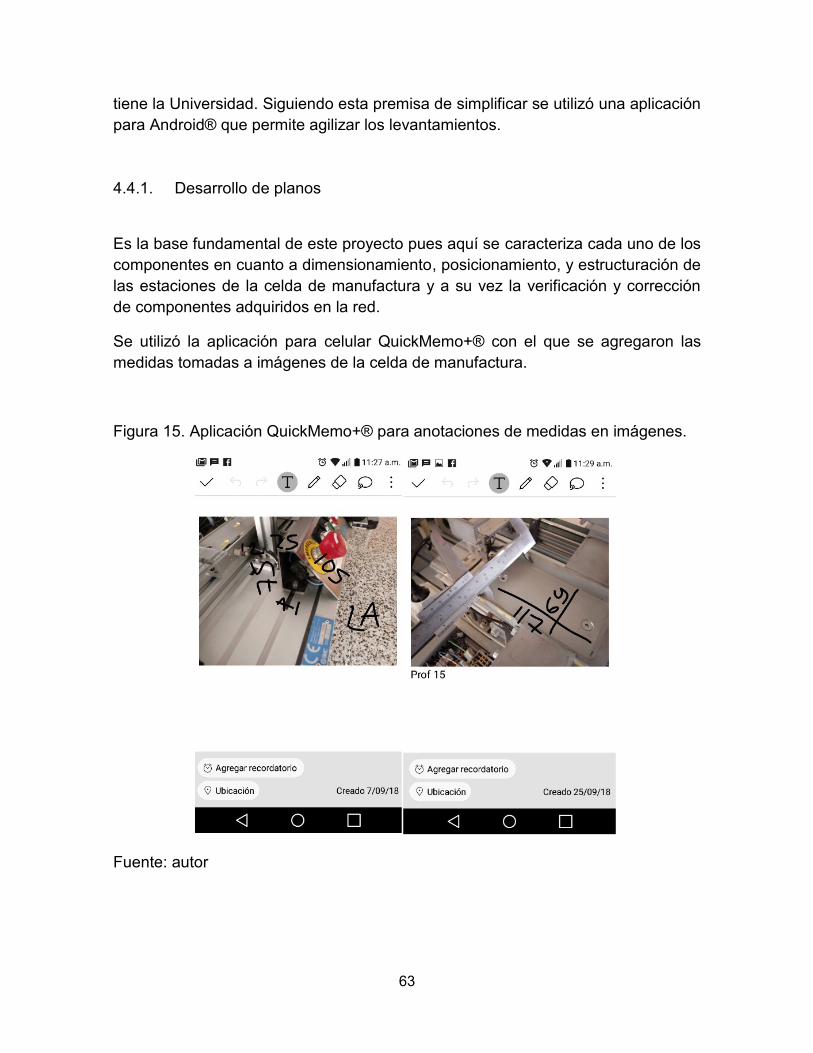
63
tiene la Universidad. Siguiendo esta premisa de simplificar se utilizó una aplicación
para Android® que permite agilizar los levantamientos.
4.4.1. Desarrollo de planos
Es la base fundamental de este proyecto pues aquí se caracteriza cada uno de los
componentes en cuanto a dimensionamiento, posicionamiento, y estructuración de
las estaciones de la celda de manufactura y a su vez la verificación y corrección
de componentes adquiridos en la red.
Se utilizó la aplicación para celular QuickMemo+® con el que se agregaron las
medidas tomadas a imágenes de la celda de manufactura.
Figura 15. Aplicación QuickMemo+® para anotaciones de medidas en imágenes.
Fuente: autor
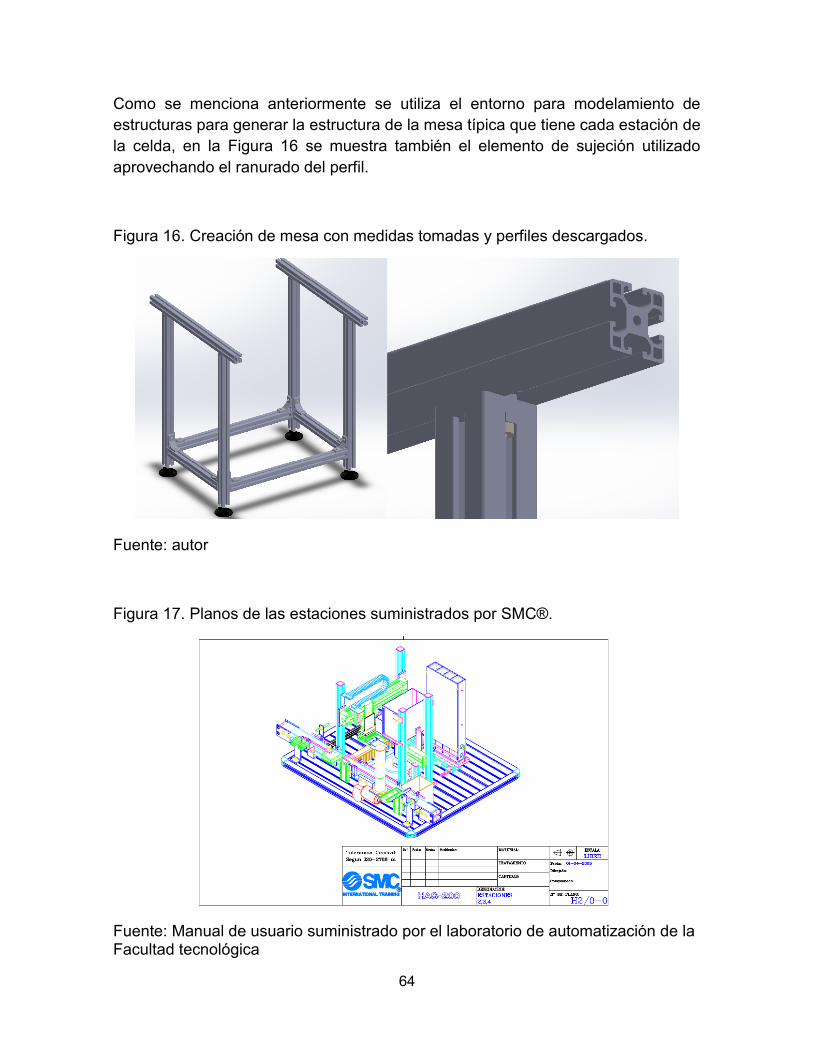
64
Como se menciona anteriormente se utiliza el entorno para modelamiento de
estructuras para generar la estructura de la mesa típica que tiene cada estación de
la celda, en la Figura 16 se muestra también el elemento de sujeción utilizado
aprovechando el ranurado del perfil.
Figura 16. Creación de mesa con medidas tomadas y perfiles descargados.
Fuente: autor
Figura 17. Planos de las estaciones suministrados por SMC®.
Fuente: Manual de usuario suministrado por el laboratorio de automatización de la Facultad tecnológica
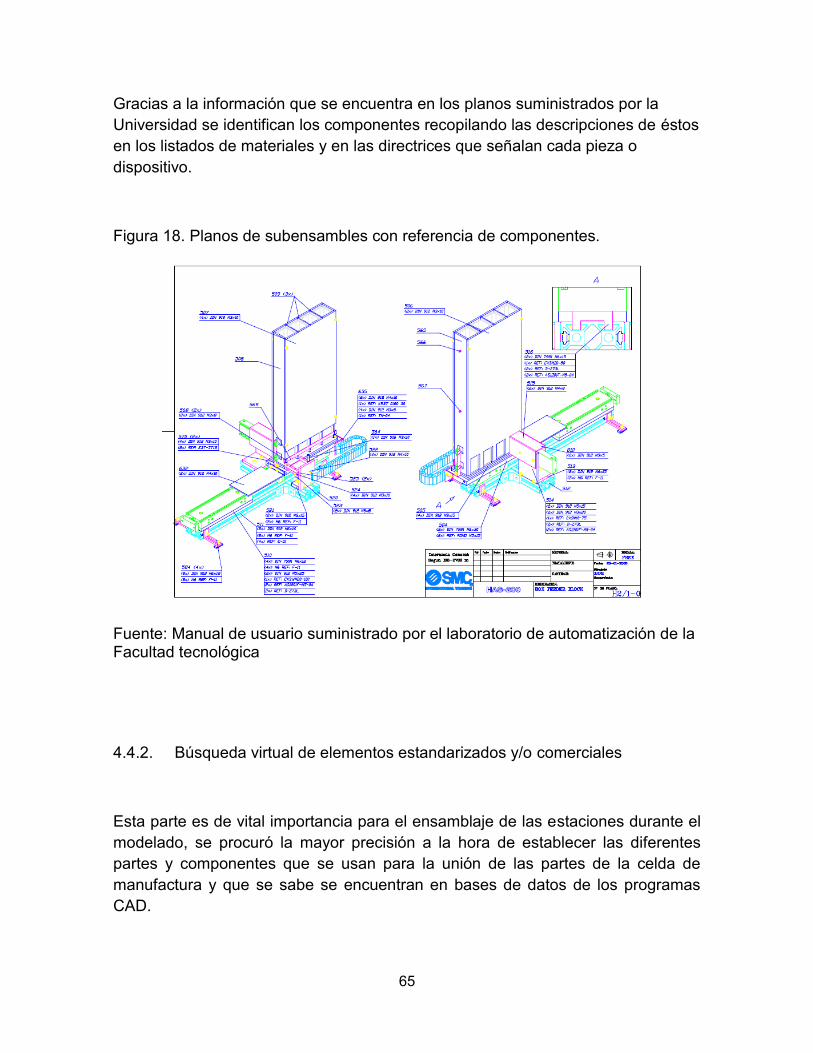
65
Gracias a la información que se encuentra en los planos suministrados por la
Universidad se identifican los componentes recopilando las descripciones de éstos
en los listados de materiales y en las directrices que señalan cada pieza o
dispositivo.
Figura 18. Planos de subensambles con referencia de componentes.
Fuente: Manual de usuario suministrado por el laboratorio de automatización de la Facultad tecnológica
4.4.2. Búsqueda virtual de elementos estandarizados y/o comerciales
Esta parte es de vital importancia para el ensamblaje de las estaciones durante el
modelado, se procuró la mayor precisión a la hora de establecer las diferentes
partes y componentes que se usan para la unión de las partes de la celda de
manufactura y que se sabe se encuentran en bases de datos de los programas
CAD.
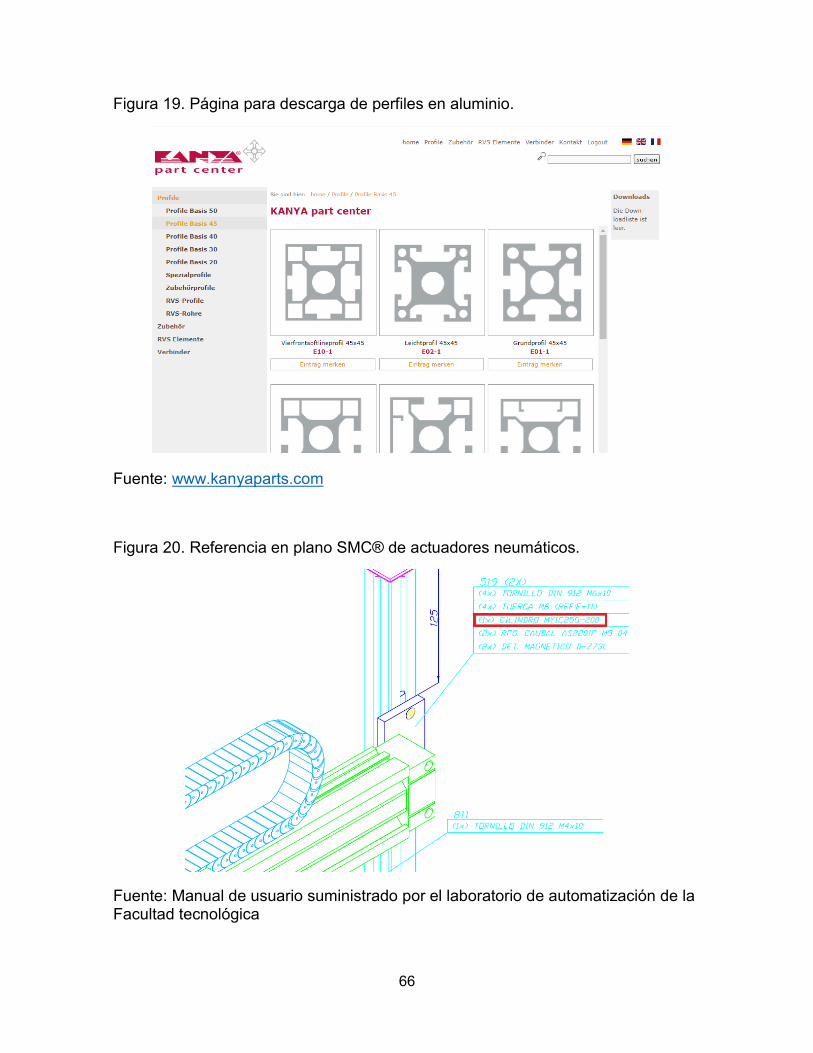
66
Figura 19. Página para descarga de perfiles en aluminio.
Fuente: www.kanyaparts.com
Figura 20. Referencia en plano SMC® de actuadores neumáticos.
Fuente: Manual de usuario suministrado por el laboratorio de automatización de la Facultad tecnológica
67
Figura 21. Página principal para descarga de componentes SMC®.
Fuente: www.smcworld.com/cadlib/en-jp/
Figura 22. Variación de características de componentes para descarga en página SMC®.
Fuente: www.smcworld.com/cadlib/en-jp/

68
Figura 23. Actuador MY1C25G – 200 descargado para Solid Works®.
Fuente: autor
4.4.3. Modelamiento de sub-ensambles de cada estación
Se trata de la verificación en la unión de piezas y superficies para la transmisión
de movimientos, análisis de topes, interferencias de movimientos entre piezas y
fuerzas entre ellas para el ensamblaje de componentes que realizan tareas
específicas.

69
Figura 24. Subensambles estación 1, 2 y 3. A la izquierda: alimentador de recipientes; a la derecha: desplazador de recipientes.
Fuente: autor
4.4.4. Ensamble de estaciones de trabajo
Conformación de subensambles, fijación de componentes en el modelo en los
bancos de trabajo estandarizados a través de la verificación de posicionamiento
de cada uno de ellos para la realización del proceso como tal de la estación.

70
Figura 25. Mesa base para ensamble de estaciones.
Fuente: autor
Figura 26. Ensamble de banda transportadora generalizada de conexión entre estaciones.
Fuente: autor
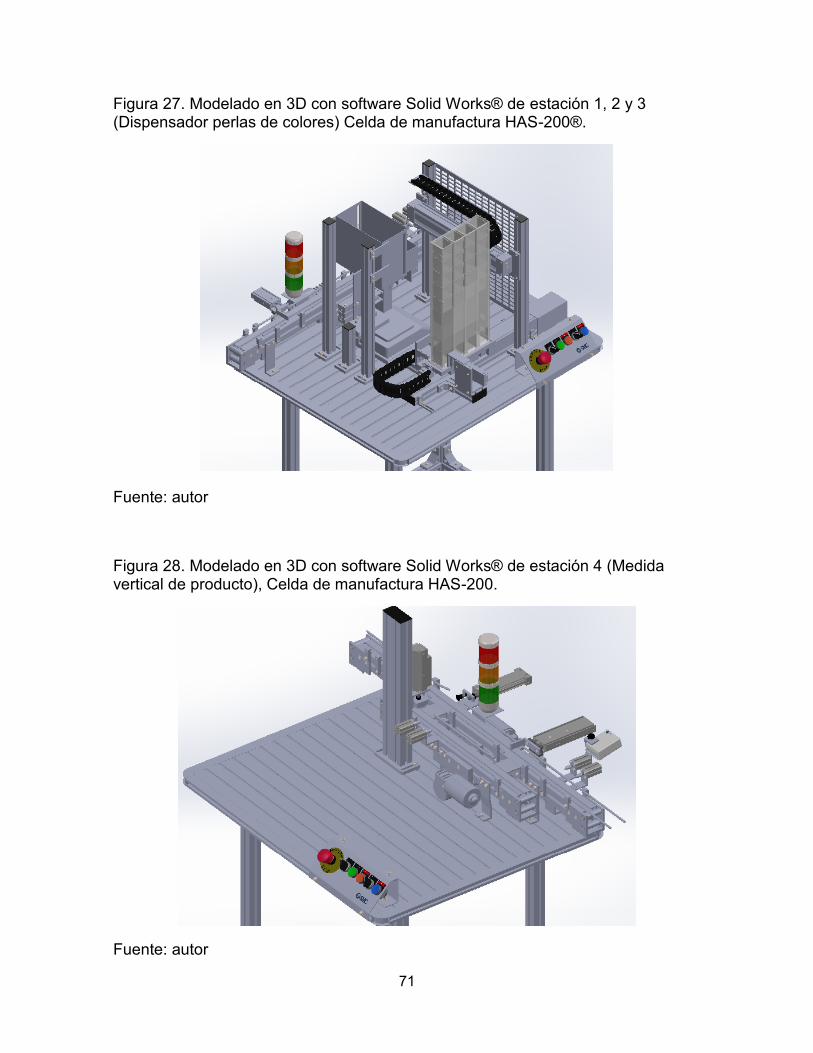
71
Figura 27. Modelado en 3D con software Solid Works® de estación 1, 2 y 3 (Dispensador perlas de colores) Celda de manufactura HAS-200®.
Fuente: autor
Figura 28. Modelado en 3D con software Solid Works® de estación 4 (Medida vertical de producto), Celda de manufactura HAS-200.
Fuente: autor
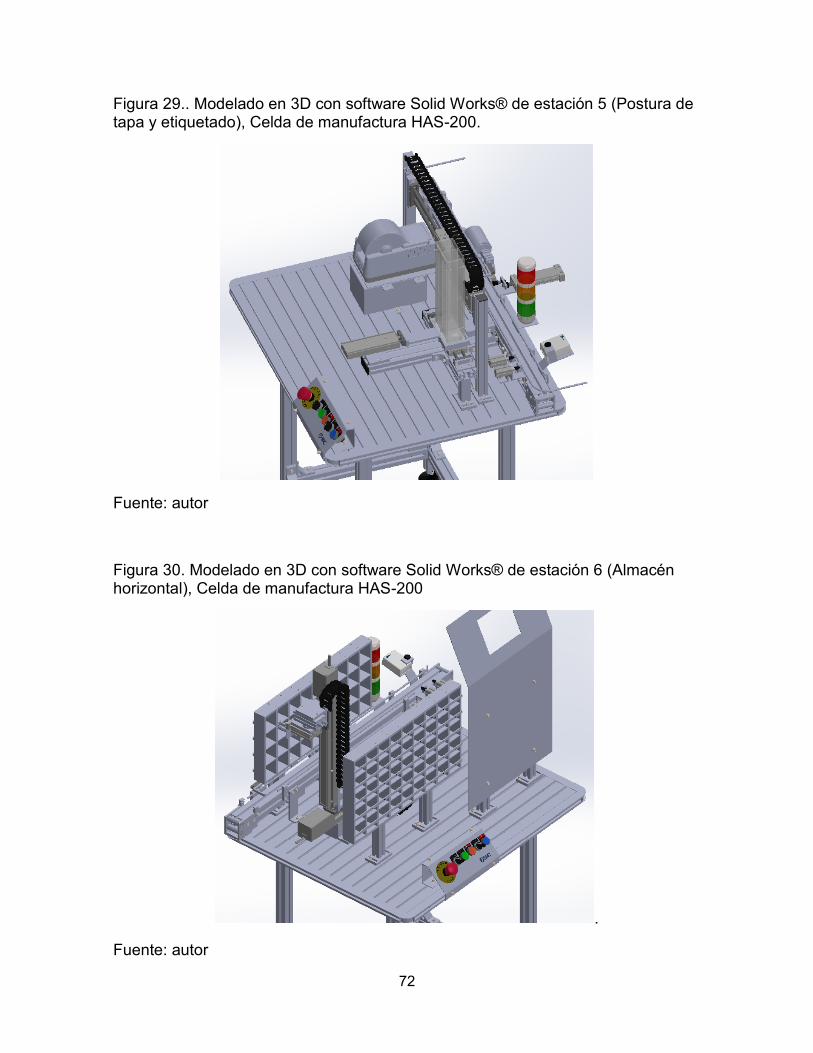
72
Figura 29.. Modelado en 3D con software Solid Works® de estación 5 (Postura de tapa y etiquetado), Celda de manufactura HAS-200.
Fuente: autor
Figura 30. Modelado en 3D con software Solid Works® de estación 6 (Almacén horizontal), Celda de manufactura HAS-200
.
Fuente: autor
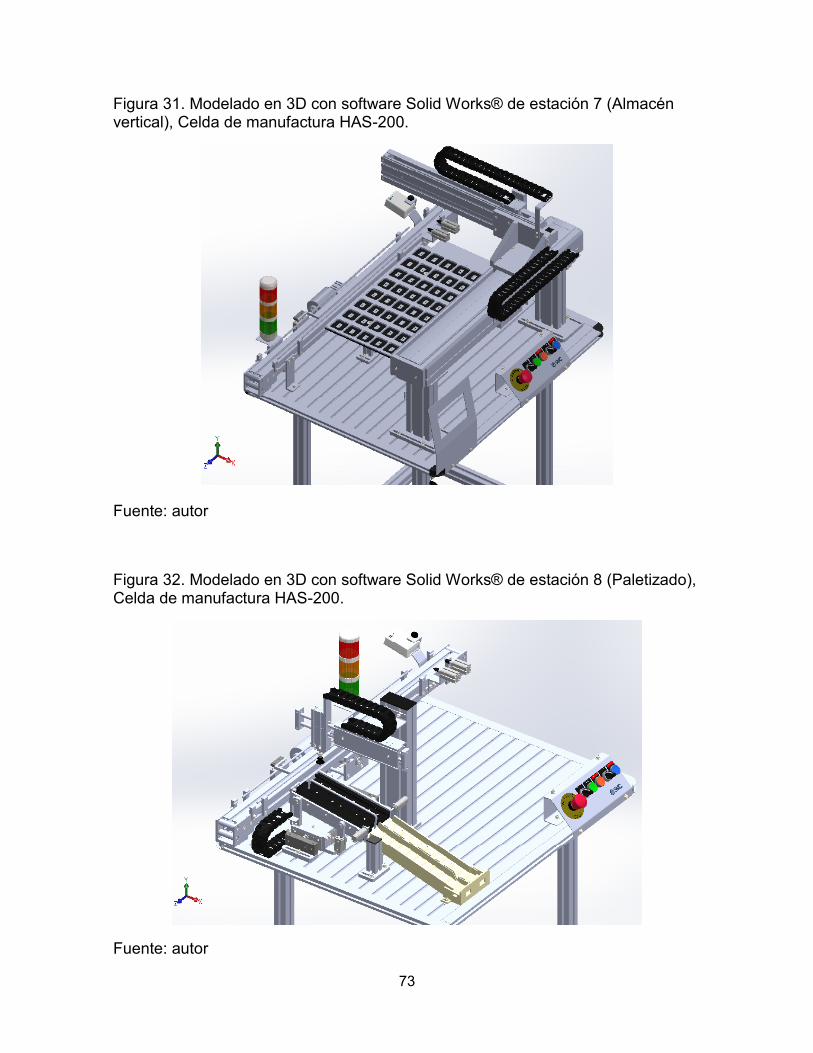
73
Figura 31. Modelado en 3D con software Solid Works® de estación 7 (Almacén vertical), Celda de manufactura HAS-200.
Fuente: autor
Figura 32. Modelado en 3D con software Solid Works® de estación 8 (Paletizado), Celda de manufactura HAS-200.
Fuente: autor

74
4.4.5. Ensamble de la celda de manufactura
Alineamiento de los ensambles de las estaciones de trabajo, en el caso de la celda
de manufactura FMS-200, por medio de bandas transportadoras lineales para
cada estación que entre sí se encuentran intercomunicadas en forma de “U” para
toda la celda, verificando la entrada y salida del producto en cada una de las
estaciones vista como un sistema.
Figura 33. Modelado celda de manufactura HAS-200 en entorno de software Solid Works®.
Fuente: autor
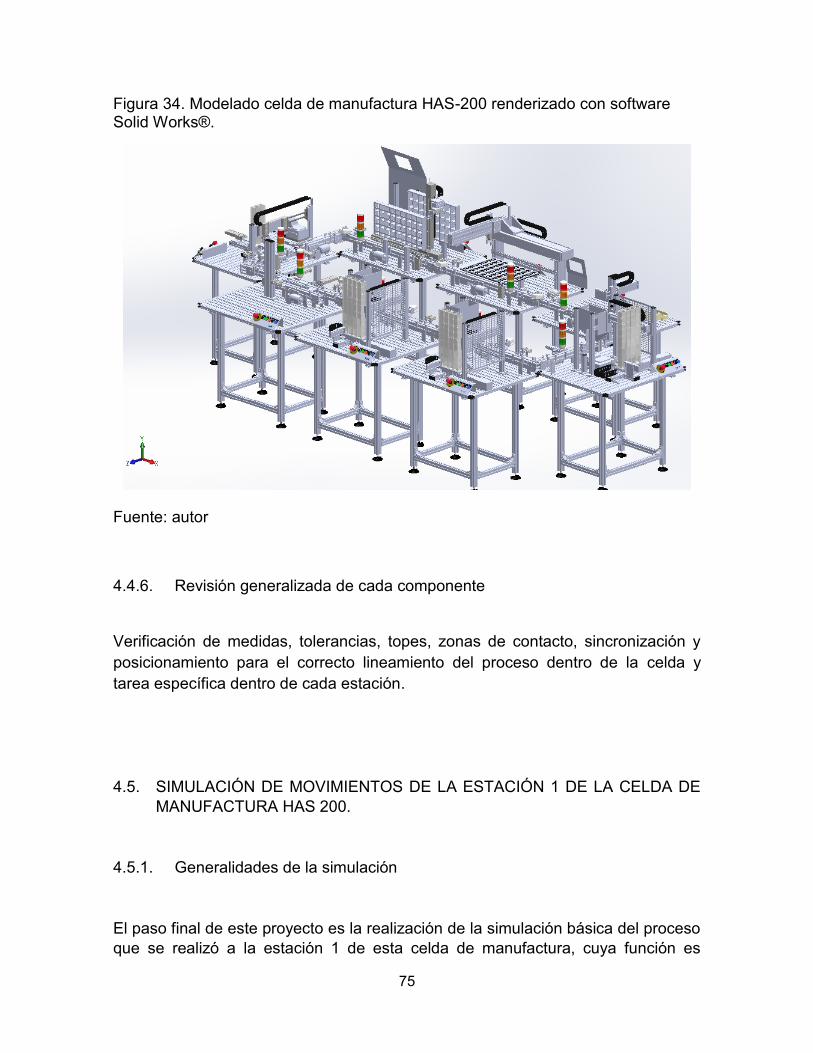
75
Figura 34. Modelado celda de manufactura HAS-200 renderizado con software Solid Works®.
Fuente: autor
4.4.6. Revisión generalizada de cada componente
Verificación de medidas, tolerancias, topes, zonas de contacto, sincronización y
posicionamiento para el correcto lineamiento del proceso dentro de la celda y
tarea específica dentro de cada estación.
4.5. SIMULACIÓN DE MOVIMIENTOS DE LA ESTACIÓN 1 DE LA CELDA DE
MANUFACTURA HAS 200.
4.5.1. Generalidades de la simulación
El paso final de este proyecto es la realización de la simulación básica del proceso
que se realizó a la estación 1 de esta celda de manufactura, cuya función es
76
almacenar recipientes vacíos para previamente ser llenados con perlas de un color
determinado, pesados y retirados por una banda transportadora a la siguiente
estación, proceso distribuido automáticamente. Esta operación comprende las tres
primeras estaciones de la celda de manufactura, la diferenciación del color de
producto que se dispensa al recipiente es seleccionado por lector con código de
barras impreso en éste.
Figura 35. Entorno inicial del programa Siemens NX®.
Fuente: autor
Esta etapa del proyecto se realizó con el programa de Siemens NX11® (Figura
35), que cuenta con varios módulos especializados para la realización de
simulaciones de movimiento como lo son el diseñador de conceptos de
mecatrónica, el cual funciona con la aplicación de sensores a los componentes
que intervienen dentro de la simulación de movimiento y se puede seleccionar
como se describe en la Figura 36 luego de abrir una pieza o un ensamble.
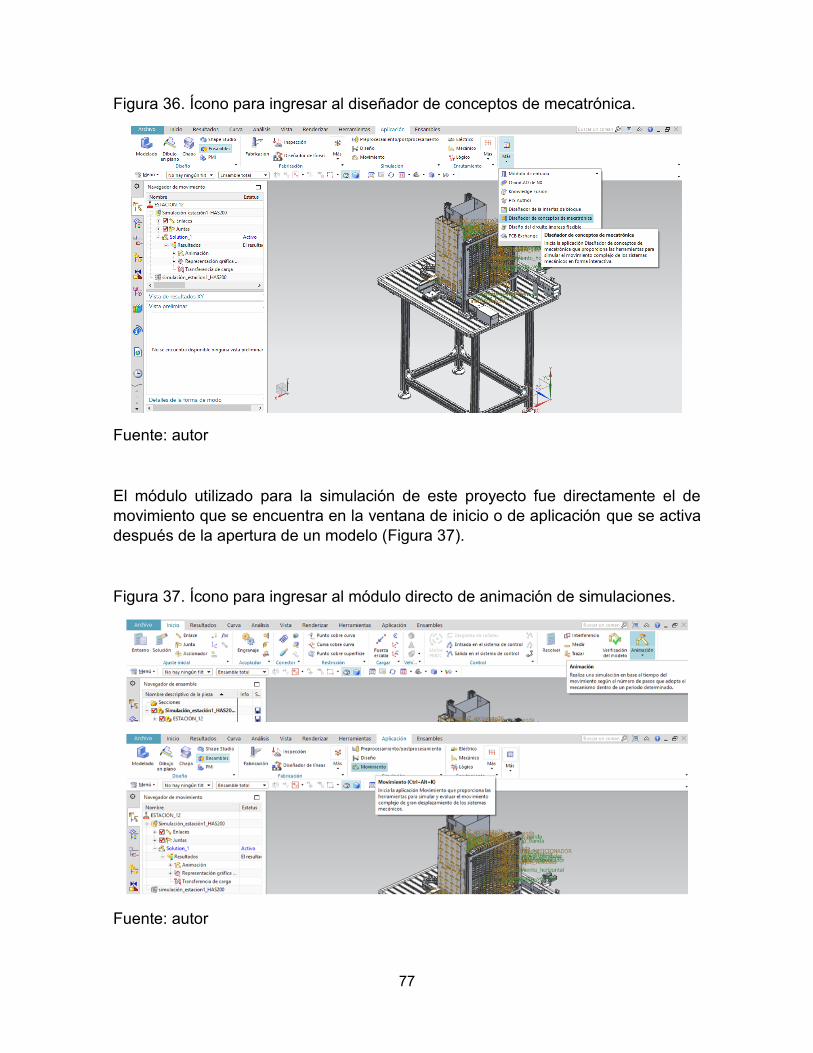
77
Figura 36. Ícono para ingresar al diseñador de conceptos de mecatrónica.
Fuente: autor
El módulo utilizado para la simulación de este proyecto fue directamente el de
movimiento que se encuentra en la ventana de inicio o de aplicación que se activa
después de la apertura de un modelo (Figura 37).
Figura 37. Ícono para ingresar al módulo directo de animación de simulaciones.
Fuente: autor

78
La Universidad Distrital - Francisco José de Caldas en la Facultad Tecnológica
posee licencia educativa para el programa Siemens NX 12®, con este aval, se
procede a realizar una serie de pasos para la apertura de los modelos realizados
en el programa Solid Works® que fue el que se utilizó para el modelamiento de la
celda. Para que el ensamble total de la estación 1 de la celda de manufactura
HAS-200 se abra correctamente en el programa de simulación se debe guardar en
formato *.STEP.
Antes de guardar el modelo en este tipo de formato, es preferible asegurarse de
que se encuentran todas las partes del ensamble y, además, que estén
posicionadas en el estado cero de la simulación, de lo contrario los primeros pasos
de la simulación deberán ser de posicionamiento de las partes a estado inicial
después de realizar la importación.
A continuación, se puede apreciar el modelo de la estación a la que se desarrolla
la simulación de movimiento dentro del entorno del programa Siemens NX 12®
(Figura 38). Este permite la simulación de movimiento de cada una de las partes
con seis grados de libertad (desplazamiento lineal sobre cada uno de los ejes XYZ
y el giro sobre los mismos). Con este método se desea simular la operación
regular que ejecuta esta estación dentro de un entorno virtual, y al mismo tiempo
por medio de este documento, la descripción paso a paso para conseguirlo sobre
cualquier estación modelada para esta celda de manufactura.
Figura 38. Modelo estaciones 1, 2 y 3 de la celda de manufactura HAS 200 dentro del entorno del programa Siemens NX®.
Fuente: autor
79
Para la realización de la simulación se debe tener claro el proceso y los elementos
que interactúan unos con otros para ejecutar la operación que en este caso
consiste en el dispensado de perlas en recipientes que provienen de una caja de
almacenaje, de donde es conducido por cuatro actuadores que sujetan el
recipiente con ventosas hasta la banda transportadora para la lectura del código
de barras. Luego es conducido debajo del dispensador, posicionado encima de
una báscula para llenado y pesado del producto de un color determinado (amarillo,
azul y rojo). Finalmente es llevado a la banda transportadora para ser conducido a
la siguiente estación donde se realiza el siguiente proceso.
Con esto claro se procede a identificar cada uno de los movimientos que se
describirán dentro de la programación de la simulación.
4.5.2. Descripción para la simulación de movimientos en el programa Siemens
NX®
En esta parte se realizó un instructivo consignado en el Anexo B de este documento, basado en el desarrollo de simulación que se hizo en el proyecto: “MODELAMIENTO EN UN ENTORNO VIRTUAL DE LA CELDA DE MANUFACTURA SMC- FMS – 200” de JHEISON JAVIER GARZÓN PINEDA en el 2015 con algunas mejoras y con simulación de desplazamientos giratorios y restricciones guiadas a través de croquis creados con estudios de movimiento, como aporte para el manejo de este tipo de programas. Se debe tener total claridad sobre sobre el proceso en cuanto a tiempos de desplazamiento y el dimensionamiento de las posiciones, en este caso como se trata del desplazamiento de un recipiente, sus posiciones en los ejes X, Y, y Z, dependerán del posicionamiento y las dimensiones de todos los elementos que intervienen en el proceso, por esta razón para este proyecto se tuvo vital cuidado con las separaciones entre sus partes y se grabó un video del proceso para hacer una sincronización en la simulación acorde a los tiempos de este. Finalmente, al realizar la simulación para la estación 1 de la celda de manufactura HAS-200 se obtuvo el movimiento que realizan los recipientes para ejecutar el proceso productivo de esta estación, sincronizado con los desplazamientos de cada uno de los actuadores y partes que intervienen allí, incluyendo las cadenas porta cable, a las que se hizo un estudio de movimiento con un croquis del trayecto de sus eslabones, aplicando la herramienta punto sobre cara en cada uno de los centros de eslabones que alcanzaran a intervenir durante el movimiento de los actuadores conectados.
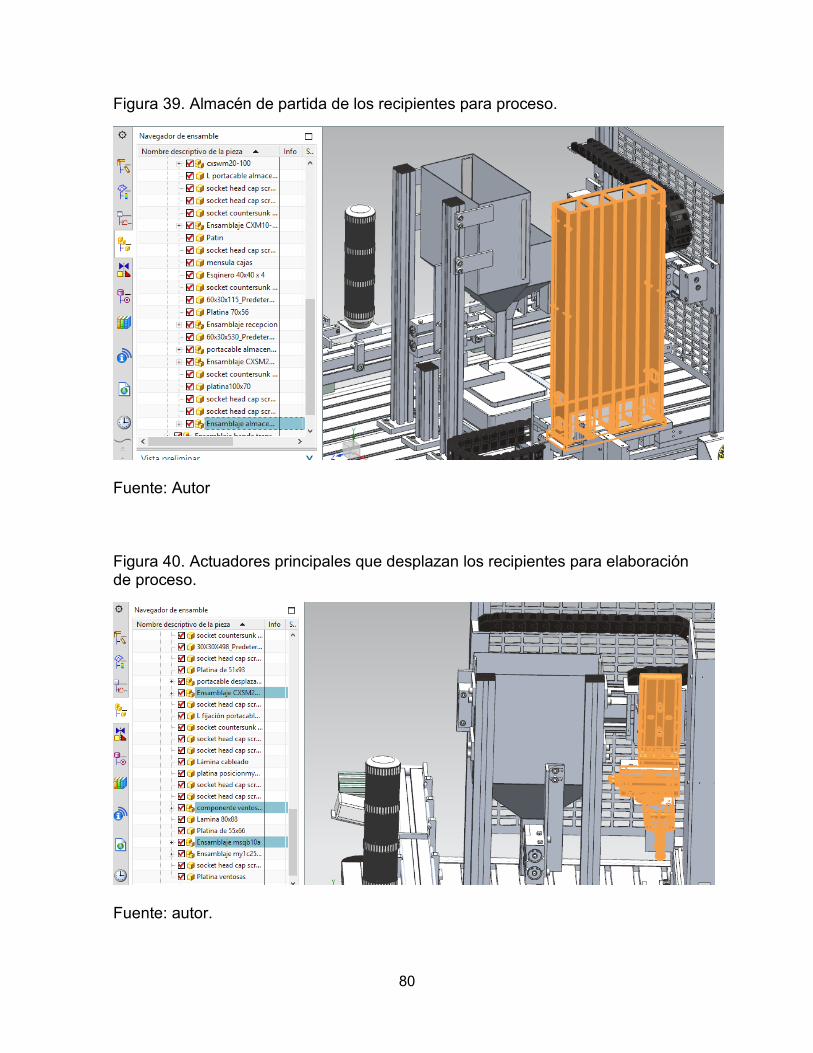
80
Figura 39. Almacén de partida de los recipientes para proceso.
Fuente: Autor Figura 40. Actuadores principales que desplazan los recipientes para elaboración de proceso.
Fuente: autor.
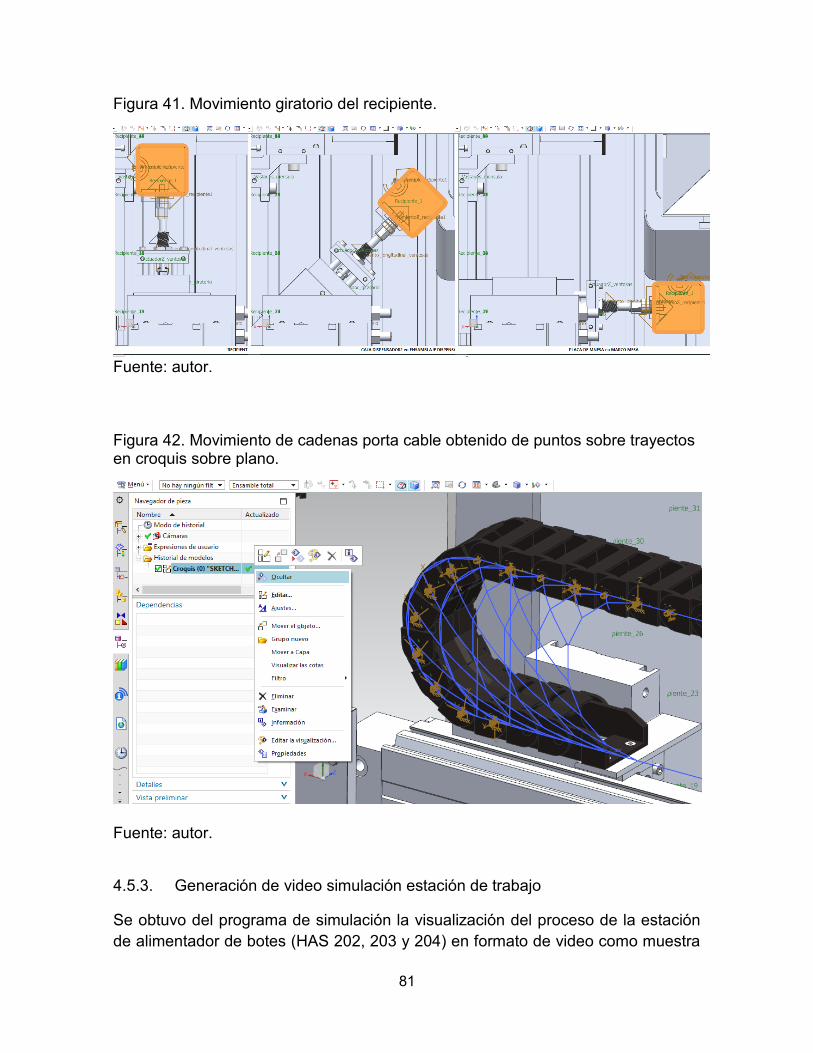
81
Figura 41. Movimiento giratorio del recipiente.
Fuente: autor.
Figura 42. Movimiento de cadenas porta cable obtenido de puntos sobre trayectos en croquis sobre plano.
Fuente: autor.
4.5.3. Generación de video simulación estación de trabajo
Se obtuvo del programa de simulación la visualización del proceso de la estación
de alimentador de botes (HAS 202, 203 y 204) en formato de video como muestra
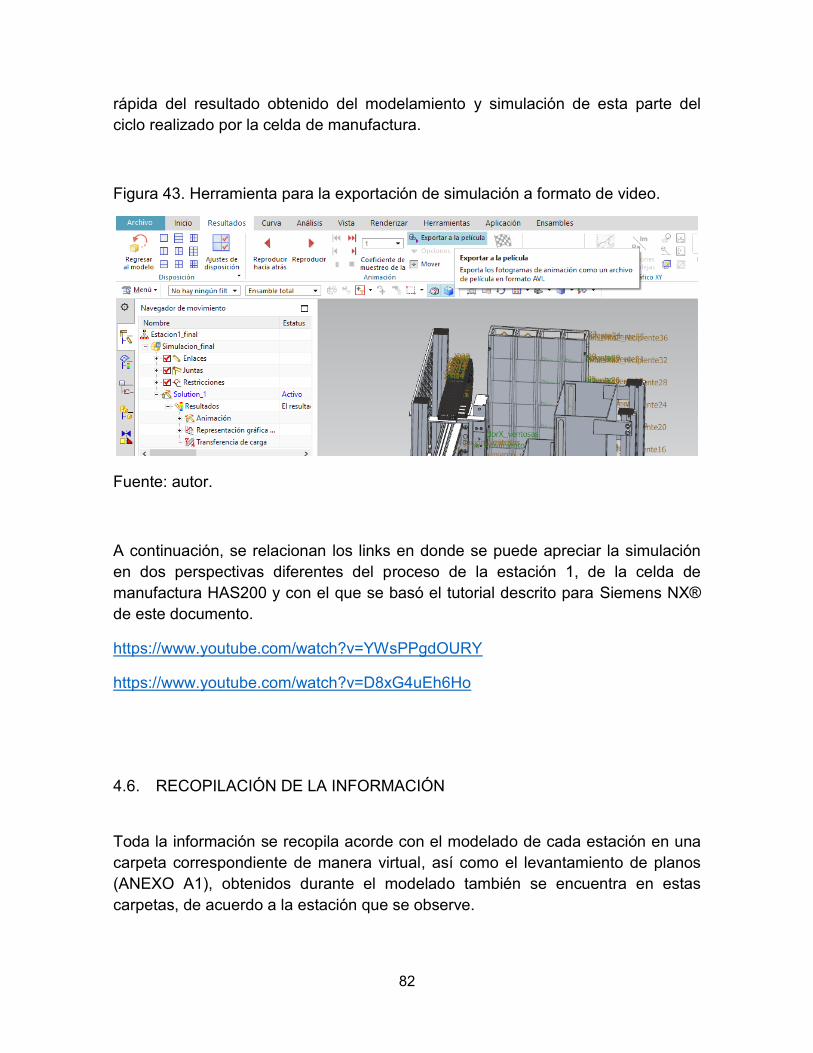
82
rápida del resultado obtenido del modelamiento y simulación de esta parte del
ciclo realizado por la celda de manufactura.
Figura 43. Herramienta para la exportación de simulación a formato de video.
Fuente: autor.
A continuación, se relacionan los links en donde se puede apreciar la simulación
en dos perspectivas diferentes del proceso de la estación 1, de la celda de
manufactura HAS200 y con el que se basó el tutorial descrito para Siemens NX®
de este documento.
https://www.youtube.com/watch?v=YWsPPgdOURY
https://www.youtube.com/watch?v=D8xG4uEh6Ho
4.6. RECOPILACIÓN DE LA INFORMACIÓN
Toda la información se recopila acorde con el modelado de cada estación en una
carpeta correspondiente de manera virtual, así como el levantamiento de planos
(ANEXO A1), obtenidos durante el modelado también se encuentra en estas
carpetas, de acuerdo a la estación que se observe.
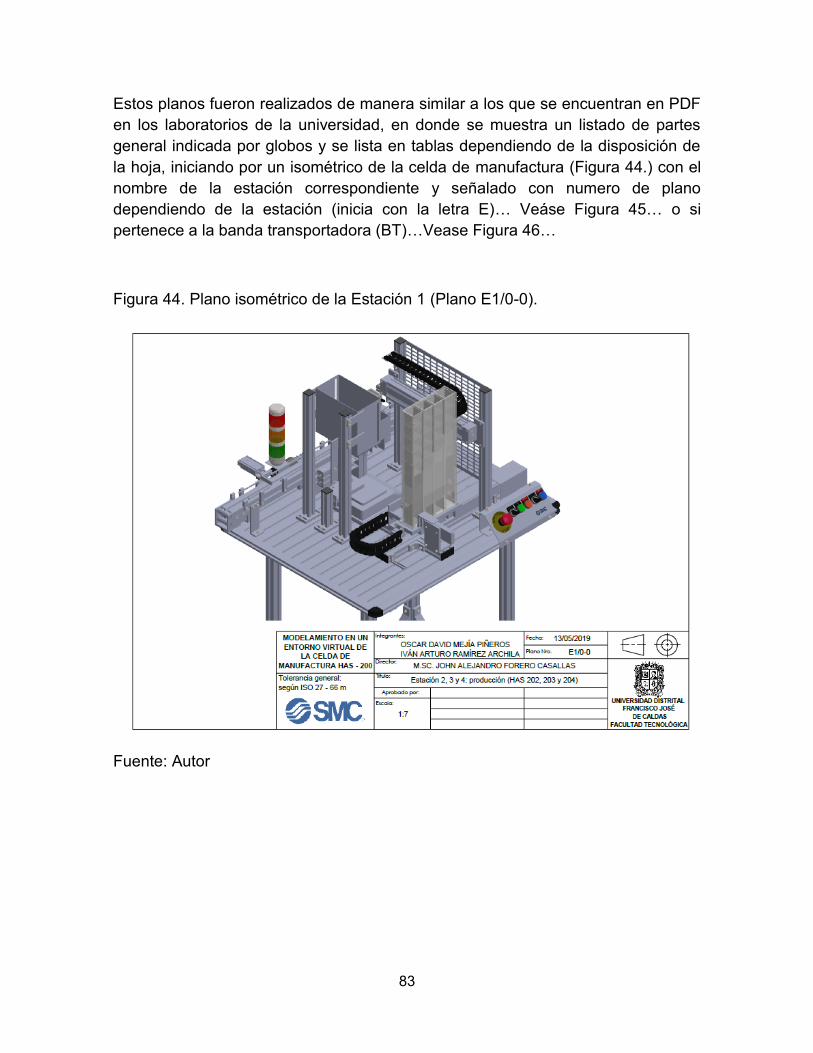
83
Estos planos fueron realizados de manera similar a los que se encuentran en PDF
en los laboratorios de la universidad, en donde se muestra un listado de partes
general indicada por globos y se lista en tablas dependiendo de la disposición de
la hoja, iniciando por un isométrico de la celda de manufactura (Figura 44.) con el
nombre de la estación correspondiente y señalado con numero de plano
dependiendo de la estación (inicia con la letra E)… Veáse Figura 45… o si
pertenece a la banda transportadora (BT)…Vease Figura 46…
Figura 44. Plano isométrico de la Estación 1 (Plano E1/0-0).
Fuente: Autor
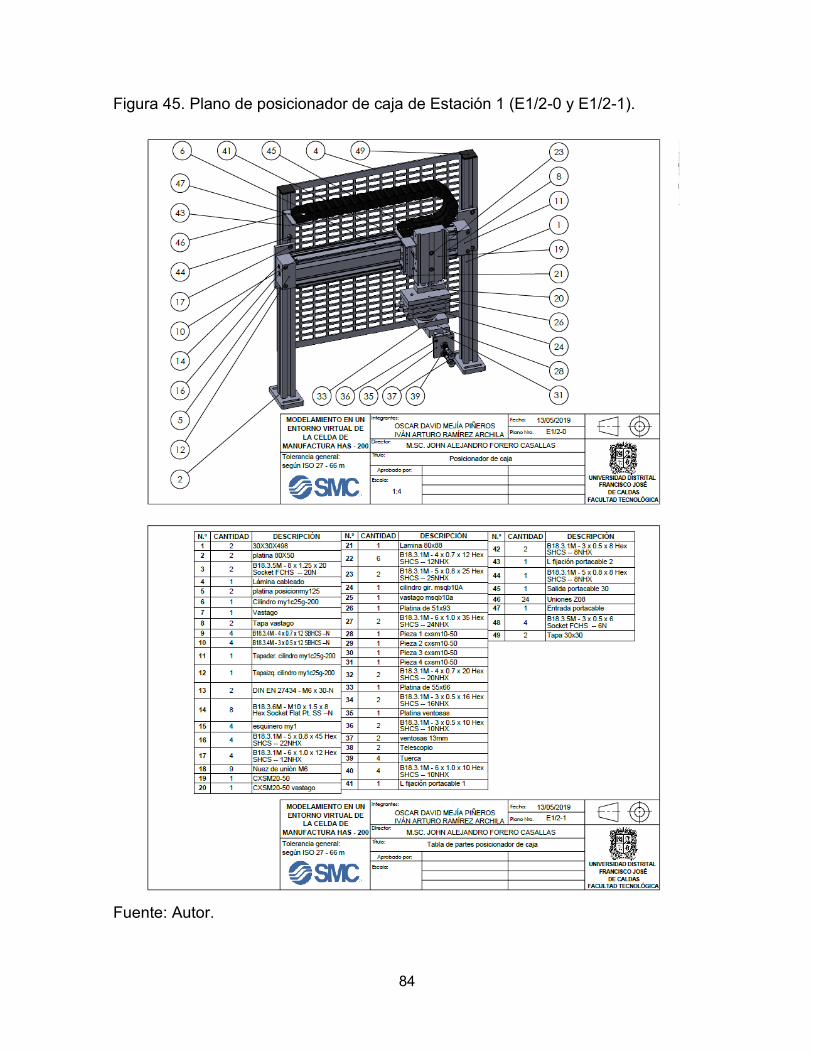
84
Figura 45. Plano de posicionador de caja de Estación 1 (E1/2-0 y E1/2-1).
Fuente: Autor.
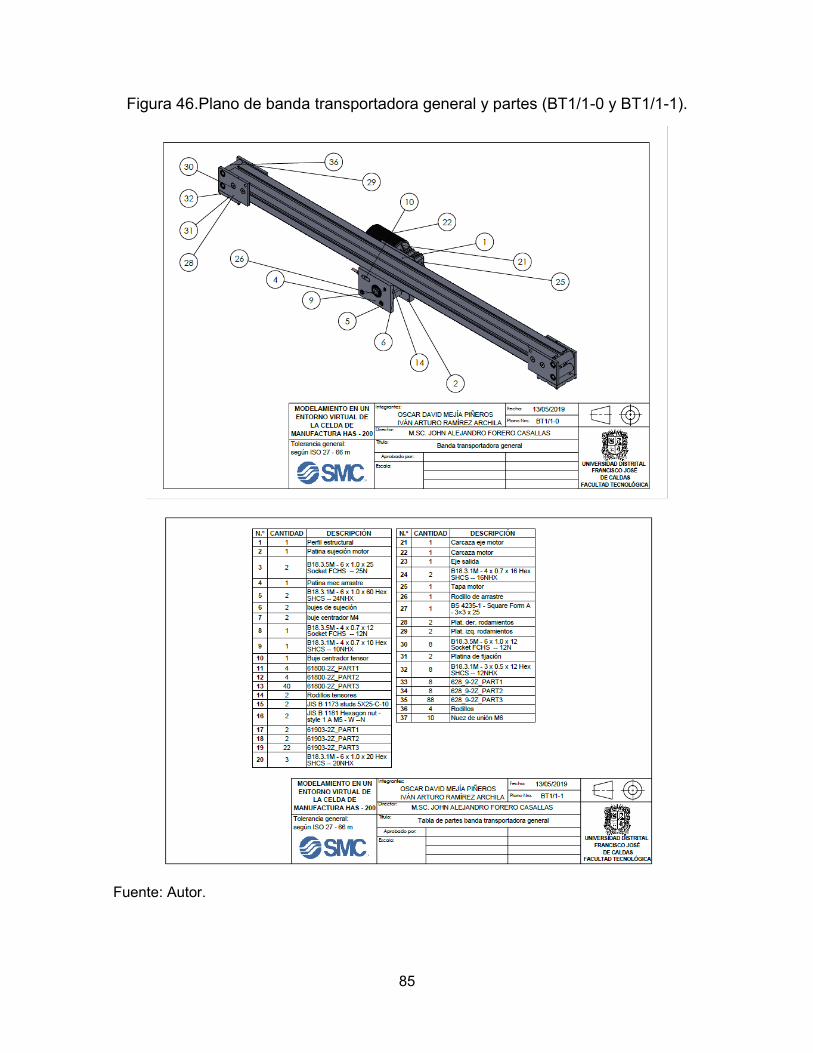
85
Figura 46.Plano de banda transportadora general y partes (BT1/1-0 y BT1/1-1).
Fuente: Autor.
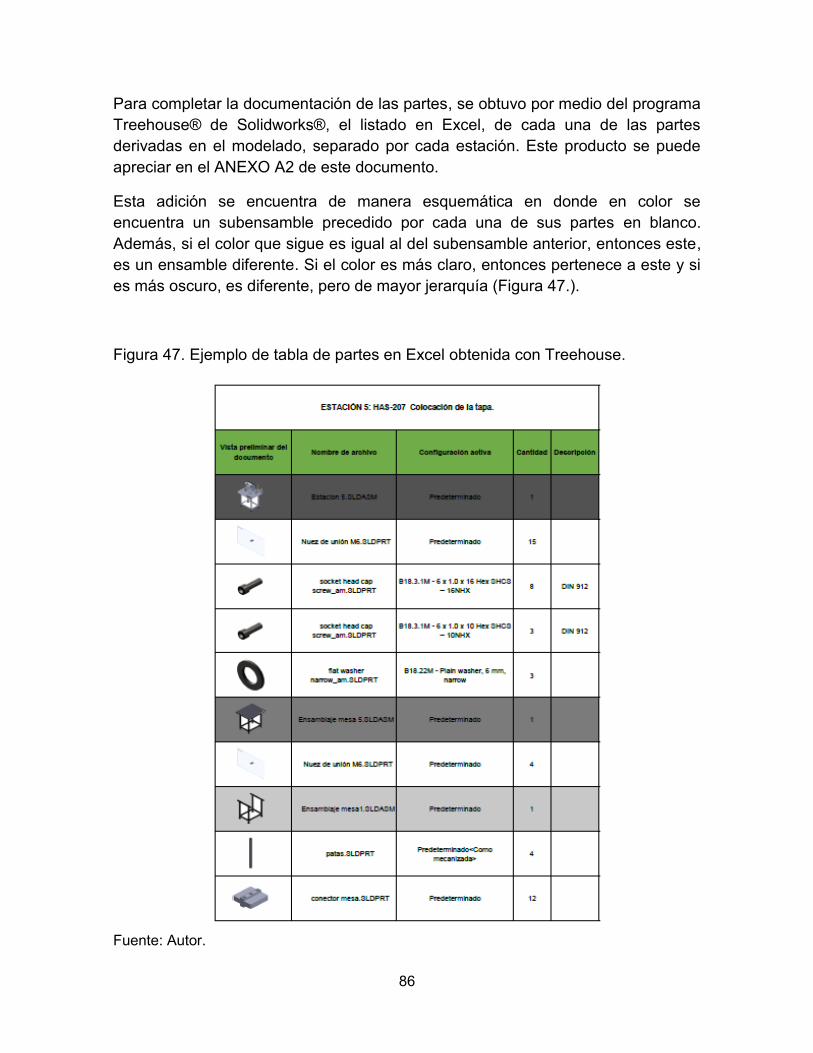
86
Para completar la documentación de las partes, se obtuvo por medio del programa
Treehouse® de Solidworks®, el listado en Excel, de cada una de las partes
derivadas en el modelado, separado por cada estación. Este producto se puede
apreciar en el ANEXO A2 de este documento.
Esta adición se encuentra de manera esquemática en donde en color se
encuentra un subensamble precedido por cada una de sus partes en blanco.
Además, si el color que sigue es igual al del subensamble anterior, entonces este,
es un ensamble diferente. Si el color es más claro, entonces pertenece a este y si
es más oscuro, es diferente, pero de mayor jerarquía (Figura 47.).
Figura 47. Ejemplo de tabla de partes en Excel obtenida con Treehouse.
Fuente: Autor.
87
5. CONCLUSIONES
Como resultado de este proyecto la Universidad cuenta ahora con el entorno
virtual completamente documentado y funcional de la celda de manufactura HAS-
200 lo que permite multiplicar en términos académicos este recurso de altos
estándares tecnológicos.
La ejecución de este proyecto permitió afianzar y emplear los conocimientos
adquiridos en el campo de desarrollo de modelos de alta ingeniería porque se
pensó desde un inicio una metodología práctica y eficiente basada en el uso
adecuado de los modelos de elementos normalizados que son de libre acceso.
Impulsa y genera prestigio para que en la Universidad que se lleven a cabo
proyectos como este ya que el resultado es satisfactorio en cuanto a la calidad de
los modelos como en su secuencia de ensamble obteniendo una simulación clara
y explicita sobre los movimientos de la estación.
Es de destacar, que las celdas de manufactura constituyen una gran herramienta
a nivel académico, ya que abarca varias ramas de la ingeniería, facilitando el
aprendizaje de conceptos de la industria a los cuales es difícil llegar dentro de la
práctica, permitiendo observar la aplicabilidad de nociones teóricas y extender la
funcionabilidad de las herramientas que adquiere la Universidad para la
enseñanza, desencadenando una serie de proyectos generados a partir de la
información de productos ya concebidos en la mejora y creación sobre estos
mismos.
Los modelos suministrados a la Universidad de la celda de manufactura HAS-200
se realizaron en software Solid Works®, programa que ofrece gran flexibilidad de
comunicación entre archivos CAD por la posibilidad de transformación de variados
formatos, permitiendo su apertura en distintos softwares, no solo para la creación
y edición de modelos dentro del entorno virtual, sino también, para la simulación
de las variables que se quieran aplicar a los procesos que realiza cada estación.
Si bien el software de simulación 3D supra incluido en la celda de manufactura
HAS-200 por la empresa fabricante SMC® y los planos con las referencias de sus
componentes, no ofrece las múltiples ventajas del modelo virtual realizado en este
proyecto, si fueron de gran utilidad los modelos 3D de los componentes utilizados
en el ensamble de las estaciones que son suministrados de manera gratuita en la
página de esta compañía. De los 30 diferentes actuadores que son utilizados por
la celda distribuidos en cada una de las estaciones, se lograron descargar 28,
haciendo que solo 2 actuadores requirieran del modelado total.
88
Fueron varias las herramientas de gran utilidad para el desarrollo de este
proyecto, sin duda alguna, los planos mecánicos que reposan en la base de datos
de los laboratorios de la Universidad, permitieron agilizar la búsqueda de
componentes referenciados con números de serie, que hacían tangibles los
modelos en 3D para cualquier software CAD, complementándose junto con el
conocimiento de funcionamiento de cada una de las estaciones para el modelado
de piezas conectoras de los diferentes subensambles, reduciendo de forma ágil la
tarea de dimensionamiento para el posicionamiento de cada una de sus partes.
La verificación en laboratorio de las partes descargadas fue importante bajo dos
aspectos. El primero tiene que ver con lo asertivo de las dimensiones en los
componentes que poseían las diferentes páginas de descarga, aunque no fue
iterativo, algunas páginas ofrecían seriales de componentes erróneos, pero se
pudo verificar por medio de la descarga de catálogos de producto que el error, era
de estas páginas, haciendo que algunas fuentes fueran más confiables que otras,
pudiendo establecer el sistema de descarga 2D/3D CADENAS de SMC como
totalmente asertivo en este tipo de productos en línea. El segundo aspecto, se
presentó al tener descargados todos los actuadores del listado de planos
mecánicos entregados a los laboratorios de la Universidad, en el ciclo de
dimensionamiento, para ensamble de cada una de las estaciones, se verificó la
instalación de cada uno de estos actuadores, encontrando que tres no
coincidencias en el ámbito real, específicamente en los almacenes vertical y
horizontal, sumado al desconocimiento y falta de información por parte de los
administradores del laboratorio en el que se encuentra esta celda de manufactura
acerca de estas variantes.
89
Proyecciones
Dado que el modelado se realizó acorde con la geometría, es posible realizar para
un proyecto futuro configuraciones de parametrización geométrica para poder
proyectar a gran escala o a menor escala diferentes situaciones o entornos para
explorar otros escenarios que se podrían simular de manera muy precisa bajo los
mismos principios de la celda HAS-200.
Ya que estos programas poseen herramientas muy poderosas para analizar y
manejar de manera eficiente distintos tipos de información que se crean al realizar
los modelos y las simulaciones, se decidió utilizar la herramienta Treehouse de
SolidWorks® la cual genera un árbol de montaje con toda la jerarquía incluyendo
una buena descripción de los modelos, esta metodología de documentación para
ensambles de gran tamaño es muy eficiente y se recomienda para su posterior
implementación ya que su uso es casi genérico a la hora de documentar modelos
CAD. A partir de esto se recomienda la implementación de esta herramienta en la
última versión del programa permite una mejor documentación ya que crea listas
de partes con fotos y descripciones en un archivo de Excel de fácil manipulación y
revisión.
Las relaciones de posición con las que se generaron los ensambles permiten
realizar otras simulaciones de acuerdo con los requerimientos que se tengan,
porque son coherentes con el funcionamiento de la celda por ende brinda un
mayor grado de confiabilidad que a su vez permite desarrollar nuevas rutinas o
inclusión de otros dispositivos según sea el caso, convirtiendo los ensambles en
una herramienta para simulaciones posteriores con alto grado de confiabilidad y
buen desempeño.
90
6. BIBLIOGRAFÍA
A., E. (2017). Development of Conceptual Model for Virtualization of Bulk Materials
Dispensing Technological Process. International Conference on Industrial
Engineering. ICIE. .
Claves, P. (2014). LA IMPORTANCIA DE LOS SISTEMAS DE INFORMACIÓN EN LAS
ORGANIZACIONES AUTOMATIZADAS.
FERROLHO, A. (2006). Control and Scheduling in Flexible Manufacturing Cells.
Garzón Pineda, J. J. (2015). Modelamiento en un entorno virtual de la celda de
manufactura SMC- FMS -200. Bogotá.
http://herramientas.camaramedellin.com.co/Inicio/Buenaspracticasempresariales/Bibliotec
aProducciónyOperaciones/Automatizaciondelosprocesosindustriales.aspx. (s.f.).
Recuperado el 26 de abril de 2018
https://agenciadenoticias.unal.edu.co/detalle/article/modelos-virtuales-mejoran-
aprendizaje-de-la-ciencia.html. (15 de septiembre de 2016).
https://prezi.com/xjfm6dcww0wd/sistema-de-produccion-por-celdas-de-manufactura/.
(s.f.). Recuperado el 26 de abril de 2018
https://www.dinero.com/emprendimiento/articulo/automatizacion-en-las-empresas-
colombianas-en-el-2020-segun-deloitte/242846. (s.f.).
Saber, D. (2015). Reality for Manufacturing: A Robotic Cell Case Study. Department of
Industrial Engineering. Saudi Arabia.
smc. (2018). www.smctraining.com. Recuperado el 2018
SMC, I. T. (2005). Manual de Usuario del 3DSupra versión usuario.
SMC, I. T. (s.f.). SMC, International Training. Folleto “HAS-200, Sistema altamente
authttp://www.smctraining.com/es/webpage/indexpage/172. 24 pag.
Technology, W. U. (2017). Research on Assembly Modeling Process Based on Virtual
Manufacturing Interactive Application Technology. School of Mechanical and
Electronic Engineering. Wuhan, China.
www.reporteroindustrial.com. (s.f.). Recuperado el 25 de abril de 2018
www.smctraining.com/webpage/indexpage/311. (s.f.). Recuperado el 26 de abril de 2018
91
S. De, “HAS-200.”
“Pirámide de automatización.” [Online]. Available:
https://www.smctraining.com/webpage/indexpage/311/. [Accessed: 26-Apr-2018].
P. Claves, “LA IMPORTANCIA DE LOS SISTEMAS DE INFORMACIÓN EN LAS
ORGANIZACIONES AUTOMATIZADAS,” 2014.
“Automatización de los procesos industriales.” [Online]. Available:
http://herramientas.camaramedellin.com.co/Inicio/Buenaspracticasempresariales/B
ibliotecaProducciónyOperaciones/Automatizaciondelosprocesosindustriales.aspx.
[Accessed: 26-Apr-2018].
“Sistema de Producción por Celdas de Manufactura de en Prezi.” [Online].
Available: https://prezi.com/xjfm6dcww0wd/sistema-de-produccion-por-celdas-de-
manufactura/. [Accessed: 26-Apr-2018].
“Evolución de la automatización industrial.” [Online]. Available:
http://www.reporteroindustrial.com/temas/Evolucion-de-la-automatizacion-
industrial%2B98784. [Accessed: 25-Apr-2018].
GARZÓN PINEDA, Jheison Javier. Modelamiento en un entorno virtual de la celda
de manufactura SMC- FMS -200. Bogotá: Universidad Distrital Francisco José de
Caldas, Facultad Tecnológica. 2015. 133 pag.
SMC, International Training. Folleto “HAS-200, Sistema altamente automatizado”.
Extraído de: http://www.smctraining.com/es/webpage/indexpage/172. 24 pag.
ERULANOVA A. Development of Conceptual Model for Virtualization of Bulk
Materials Dispensing Technological Process. International Conference on
Industrial Engineering. ICIE. 2017.
FERROLHO, Antonio. Control and Scheduling in Flexible Manufacturing Cells.
Portugal. 6 pag. 2006.
DARMOUL Saber. Reality for Manufacturing: A Robotic Cell Case Study.
Department of Industrial Engineering. King Saud University. Saudi Arabia. 7pag.
2015.
Research on Assembly Modeling Process Based on Virtual Manufacturing
Interactive Application Technology. School of Mechanical and Electronic
Engineering. Wuhan University of Technology. Wuhan, China. 5 pág. 2017.
92
SMC, International Training. Manual de Usuario del 3DSupra versión usuario.
2005.
Automatización en las empresas colombianas en el 2020 según Deloitte. Artículo
extraído de: https://www.dinero.com/emprendimiento/articulo/automatizacion-en-
las-empresas-colombianas-en-el-2020-segun-deloitte/242846
Modelos virtuales mejoran aprendizaje de la ciencia. Artículo extraído de:
https://agenciadenoticias.unal.edu.co/detalle/article/modelos-virtuales-mejoran-
aprendizaje-de-la-ciencia.html
http://webassistants.partcommunity.com/23d-
libs/smc_jp_assistant/index_english.html
https://www.traceparts.com/es/
https://grabcad.com/library/software/solidworks
http://www.kanyaparts.com/