Material Didatico Tomografia Cefet
31
Centro Federal de Educação Tecnológica de Santa Catarina Gerência Educacional de Eletrônica Prof. Flávio Augusto Soares, M.Eng. Prof. Henrique Batista Lopes, M.Eng. Florianópolis, Novembro de 2000 TOMOGRAFIA COMPUTADORIZADA CURSO TÉCNICO DE RADIOLOGIA
Transcript of Material Didatico Tomografia Cefet

Centro Federal de Educação Tecnológica de Santa Catarina Gerência Educacional de Eletrônica
Prof. Flávio Augusto Soares, M.Eng. Prof. Henrique Batista Lopes, M.Eng.
Florianópolis, Novembro de 2000
TOMOGRAFIA COMPUTADORIZADA
CURSO TÉCNICO DE RADIOLOGIA

SINE/SC – SISTEMA NACIONAL DE EMPREGO CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE SANTA CATARINA
DIRETORIA DE RELAÇÕES EMPRESARIAIS GERÊNCIA EDUCACIONAL DE ELETRÔNICA
NÚCLEO DE TECNOLOGIA CLÍNICA FUNDAÇÃO DO ENSINO TÉCNICO DE SANTA CATARINA
Instituições Envolvidas em Blumenau
HOSPITAL SANTA CATARINA HOSPITAL SANTA ISABEL
HOSPITAL MUNICIPAL SANTO ANTÔNIO
pág. iii
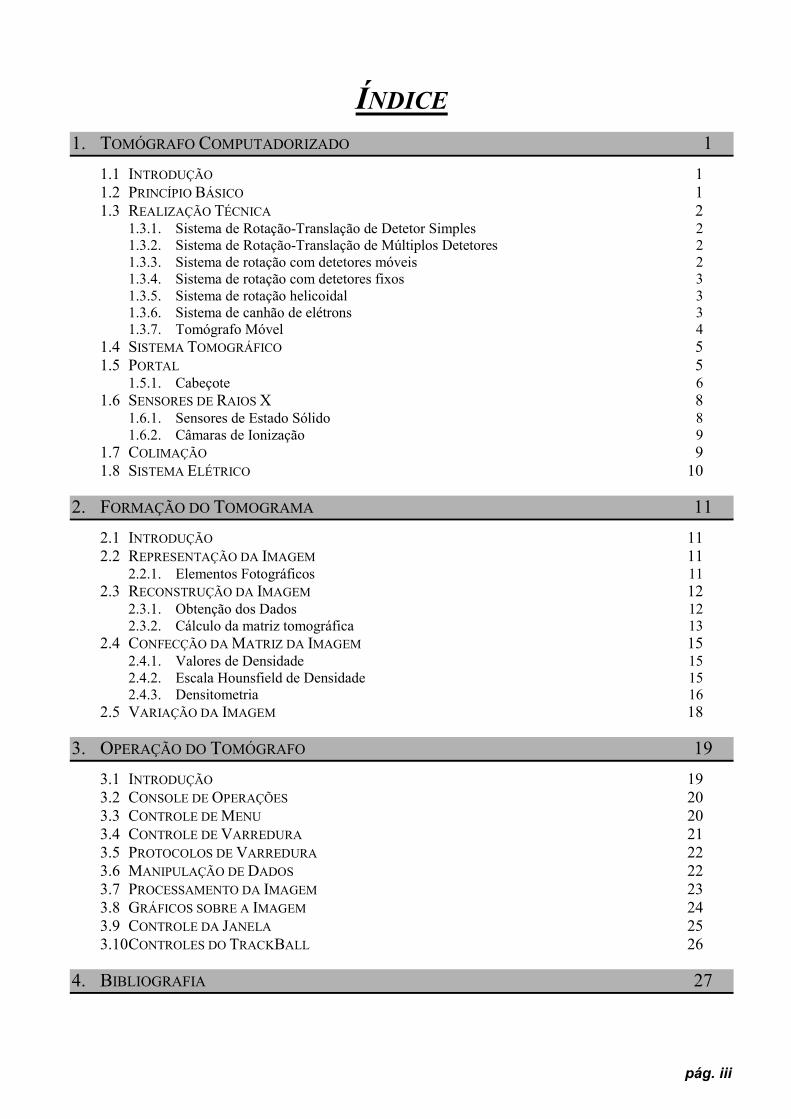
ÍNDICE 1. TOMÓGRAFO COMPUTADORIZADO 1
1.1 INTRODUÇÃO 1 1.2 PRINCÍPIO BÁSICO 1 1.3 REALIZAÇÃO TÉCNICA 2
1.3.1. Sistema de Rotação-Translação de Detetor Simples 2 1.3.2. Sistema de Rotação-Translação de Múltiplos Detetores 2 1.3.3. Sistema de rotação com detetores móveis 2 1.3.4. Sistema de rotação com detetores fixos 3 1.3.5. Sistema de rotação helicoidal 3 1.3.6. Sistema de canhão de elétrons 3 1.3.7. Tomógrafo Móvel 4
1.4 SISTEMA TOMOGRÁFICO 5 1.5 PORTAL 5
1.5.1. Cabeçote 6 1.6 SENSORES DE RAIOS X 8
1.6.1. Sensores de Estado Sólido 8 1.6.2. Câmaras de Ionização 9
1.7 COLIMAÇÃO 9 1.8 SISTEMA ELÉTRICO 10
2. FORMAÇÃO DO TOMOGRAMA 11
2.1 INTRODUÇÃO 11 2.2 REPRESENTAÇÃO DA IMAGEM 11
2.2.1. Elementos Fotográficos 11 2.3 RECONSTRUÇÃO DA IMAGEM 12
2.3.1. Obtenção dos Dados 12 2.3.2. Cálculo da matriz tomográfica 13
2.4 CONFECÇÃO DA MATRIZ DA IMAGEM 15 2.4.1. Valores de Densidade 15 2.4.2. Escala Hounsfield de Densidade 15 2.4.3. Densitometria 16
2.5 VARIAÇÃO DA IMAGEM 18
3. OPERAÇÃO DO TOMÓGRAFO 19
3.1 INTRODUÇÃO 19 3.2 CONSOLE DE OPERAÇÕES 20 3.3 CONTROLE DE MENU 20 3.4 CONTROLE DE VARREDURA 21 3.5 PROTOCOLOS DE VARREDURA 22 3.6 MANIPULAÇÃO DE DADOS 22 3.7 PROCESSAMENTO DA IMAGEM 23 3.8 GRÁFICOS SOBRE A IMAGEM 24 3.9 CONTROLE DA JANELA 25 3.10 CONTROLES DO TRACKBALL 26
4. BIBLIOGRAFIA 27
pág. iv
Folha deixada em branco
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
1. TOMÓGRAFO COMPUTADORIZADO
1.1 INTRODUÇÃO
Nos últimos 40 anos nenhum outro avanço na área de raios X diagnóstico foi tão significativo quanto o desenvolvimento da tomografia computado-rizada (TC). Já no final da década de 1950, os com-ponentes para a construção de um TC estavam disponíveis para médicos e engenheiros. Porém, so-mente em 1967, o processo tomográfico como um todo foi apresentado pelo engenheiro britânico God-frey Hounsfield. Hounsfield trabalhava na empresa britânica EMI Ltda quando foram montados os primeiros TC para teste. Outro que aju-dou no desenvolvimento do tomógrafo computadorizado foi o sul-africano Allan M. Cormack, que desenvolveu a matemática necessária para a reconstrução das imagens tomográficas. Cormack e Hounsfield foram agraciados com o Prêmio Nobel de Me-dicina no ano de 1979 por suas contribuições para o desenvolvimento do Tomó-grafo Computadorizado.
1.2 PRINCÍPIO BÁSICO
Enquanto as técnicas radiológicas conven-cionais produzem imagens somadas de um objeto, varredores tomográficos giram para dividir um objeto e organizá-lo em seções de imagens paralelas e espa-cialmente consecutivas (cortes axiais). O processo, que era originalmente totalmente mecânico, foi me-lhorado graças as novas tecnologias. E, atualmente, a alta qualidade das imagens é o resultado dos comple-xos sistemas computacionais.
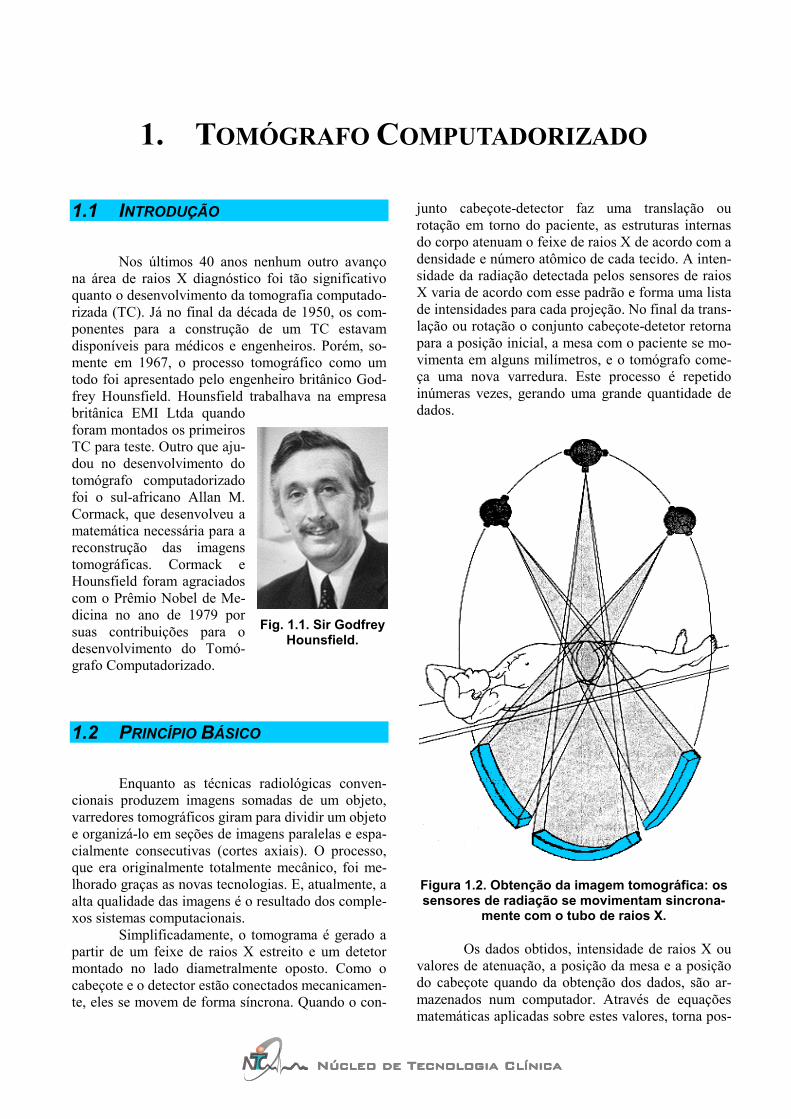
Simplificadamente, o tomograma é gerado a partir de um feixe de raios X estreito e um detetor montado no lado diametralmente oposto. Como o cabeçote e o detector estão conectados mecanicamen-te, eles se movem de forma síncrona. Quando o con-
junto cabeçote-detector faz uma translação ou rotação em torno do paciente, as estruturas internas do corpo atenuam o feixe de raios X de acordo com a densidade e número atômico de cada tecido. A inten-sidade da radiação detectada pelos sensores de raios X varia de acordo com esse padrão e forma uma lista de intensidades para cada projeção. No final da trans-lação ou rotação o conjunto cabeçote-detetor retorna para a posição inicial, a mesa com o paciente se mo-vimenta em alguns milímetros, e o tomógrafo come-ça uma nova varredura. Este processo é repetido inúmeras vezes, gerando uma grande quantidade de dados.
Figura 1.2. Obtenção da imagem tomográfica: os sensores de radiação se movimentam sincrona-
mente com o tubo de raios X. Os dados obtidos, intensidade de raios X ou
valores de atenuação, a posição da mesa e a posição do cabeçote quando da obtenção dos dados, são ar-mazenados num computador. Através de equações matemáticas aplicadas sobre estes valores, torna pos-
Fig. 1.1. Sir Godfrey
Hounsfield.
2 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
sível a determinação de relações espaciais entre as estruturas internas de uma região selecionada do cor-po humano. O tomograma calculado, ou seja, a ima-gem apresentada na tela consiste-se numa matriz de valores de atenuação, ou, num cálculo inverso, uma matriz com valores de dose absorvida. Visualmente, para o diagnóstico, os valores de atenuação são apre-sentados na forma de tons de cinza, criando assim uma imagem espacial do objeto varrido.
1.3 REALIZAÇÃO TÉCNICA
A atenuação dos raios X pelos tecidos huma-nos é medida por detetores que são alinhados atrás do paciente, opostamente a fonte de raios X. Na literatu-ra internacional, existem basicamente 5 tipos diferen-tes de sistemas de varreduras para tomógrafos computadorizados. A seguir, explanaremos rapida-mente sobre cada um deles.
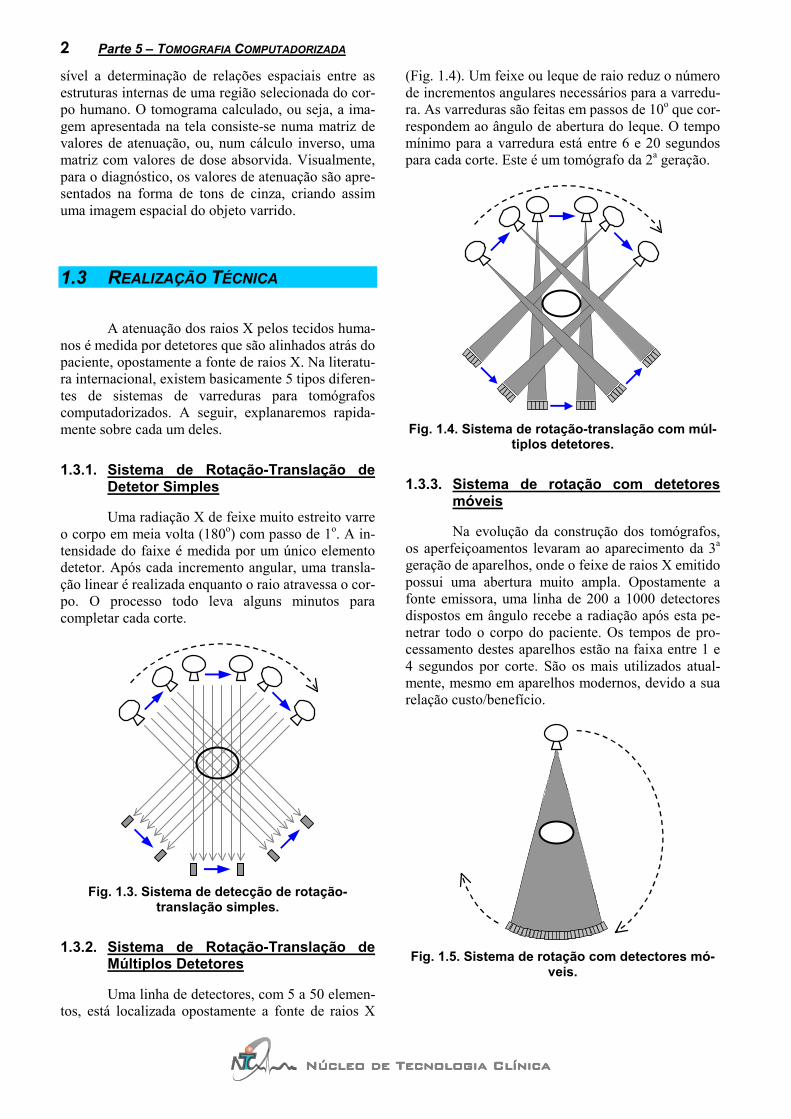
1.3.1. Sistema de Rotação-Translação de Detetor Simples
Uma radiação X de feixe muito estreito varre o corpo em meia volta (180o) com passo de 1o. A in-tensidade do faixe é medida por um único elemento detetor. Após cada incremento angular, uma transla-ção linear é realizada enquanto o raio atravessa o cor-po. O processo todo leva alguns minutos para completar cada corte.
Fig. 1.3. Sistema de detecção de rotação-
translação simples.
1.3.2. Sistema de Rotação-Translação de Múltiplos Detetores
Uma linha de detectores, com 5 a 50 elemen-tos, está localizada opostamente a fonte de raios X
(Fig. 1.4). Um feixe ou leque de raio reduz o número de incrementos angulares necessários para a varredu-ra. As varreduras são feitas em passos de 10o que cor-respondem ao ângulo de abertura do leque. O tempo mínimo para a varredura está entre 6 e 20 segundos para cada corte. Este é um tomógrafo da 2a geração.
Fig. 1.4. Sistema de rotação-translação com múl-
tiplos detetores.
1.3.3. Sistema de rotação com detetores móveis
Na evolução da construção dos tomógrafos, os aperfeiçoamentos levaram ao aparecimento da 3a geração de aparelhos, onde o feixe de raios X emitido possui uma abertura muito ampla. Opostamente a fonte emissora, uma linha de 200 a 1000 detectores dispostos em ângulo recebe a radiação após esta pe-netrar todo o corpo do paciente. Os tempos de pro-cessamento destes aparelhos estão na faixa entre 1 e 4 segundos por corte. São os mais utilizados atual-mente, mesmo em aparelhos modernos, devido a sua relação custo/benefício.
Fig. 1.5. Sistema de rotação com detectores mó-
veis.
TOMÓGRAFO COMPUTADORIZADO 3
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
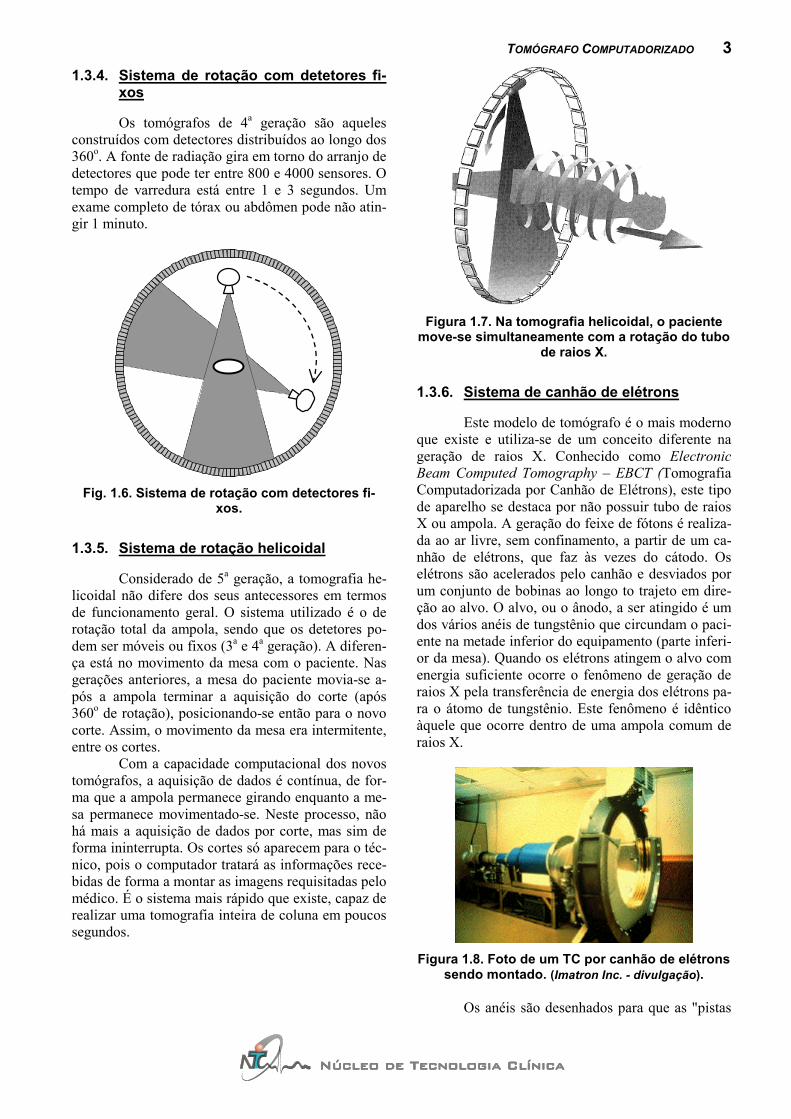
1.3.4. Sistema de rotação com detetores fi-xos
Os tomógrafos de 4a geração são aqueles construídos com detectores distribuídos ao longo dos 360o. A fonte de radiação gira em torno do arranjo de detectores que pode ter entre 800 e 4000 sensores. O tempo de varredura está entre 1 e 3 segundos. Um exame completo de tórax ou abdômen pode não atin-gir 1 minuto.
Fig. 1.6. Sistema de rotação com detectores fi-
xos.
1.3.5. Sistema de rotação helicoidal
Considerado de 5a geração, a tomografia he-licoidal não difere dos seus antecessores em termos de funcionamento geral. O sistema utilizado é o de rotação total da ampola, sendo que os detetores po-dem ser móveis ou fixos (3a e 4a geração). A diferen-ça está no movimento da mesa com o paciente. Nas gerações anteriores, a mesa do paciente movia-se a-pós a ampola terminar a aquisição do corte (após 360o de rotação), posicionando-se então para o novo corte. Assim, o movimento da mesa era intermitente, entre os cortes.
Com a capacidade computacional dos novos tomógrafos, a aquisição de dados é contínua, de for-ma que a ampola permanece girando enquanto a me-sa permanece movimentado-se. Neste processo, não há mais a aquisição de dados por corte, mas sim de forma ininterrupta. Os cortes só aparecem para o téc-nico, pois o computador tratará as informações rece-bidas de forma a montar as imagens requisitadas pelo médico. É o sistema mais rápido que existe, capaz de realizar uma tomografia inteira de coluna em poucos segundos.
Figura 1.7. Na tomografia helicoidal, o paciente
move-se simultaneamente com a rotação do tubo de raios X.
1.3.6. Sistema de canhão de elétrons
Este modelo de tomógrafo é o mais moderno que existe e utiliza-se de um conceito diferente na geração de raios X. Conhecido como Electronic Beam Computed Tomography – EBCT (Tomografia Computadorizada por Canhão de Elétrons), este tipo de aparelho se destaca por não possuir tubo de raios X ou ampola. A geração do feixe de fótons é realiza-da ao ar livre, sem confinamento, a partir de um ca-nhão de elétrons, que faz às vezes do cátodo. Os elétrons são acelerados pelo canhão e desviados por um conjunto de bobinas ao longo to trajeto em dire-ção ao alvo. O alvo, ou o ânodo, a ser atingido é um dos vários anéis de tungstênio que circundam o paci-ente na metade inferior do equipamento (parte inferi-or da mesa). Quando os elétrons atingem o alvo com energia suficiente ocorre o fenômeno de geração de raios X pela transferência de energia dos elétrons pa-ra o átomo de tungstênio. Este fenômeno é idêntico àquele que ocorre dentro de uma ampola comum de raios X.
Figura 1.8. Foto de um TC por canhão de elétrons
sendo montado. (Imatron Inc. - divulgação). Os anéis são desenhados para que as "pistas

4 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
anódicas" neles contidas produzam um feixe de fó-tons com direção conhecida e precisa. A direção do feixe é a dos sensores de raios X, que estão posicio-nados diametralmente opostos aos anéis-alvo. No caminho entre os anéis e os sensores, o feixe de fó-tons interage com o paciente que está sobre a mesa.
A vantagem deste tipo de tecnologia está principalmente no fato de não existirem partes mó-veis, o que sempre é um fator de limitação na veloci-dade de geração de imagens nos tomógrafos giratórios. Além disso, há uma grande melhora na dissipação de calor gerado pela produção de raios X, já que a "pista anódica" possui área muito maior e fica um tempo muito menor recebendo o impacto dos elétrons acelerados. Atualmente, existem mais de 100 EBCT instalados no mundo, com os Estados Unidos hospedando mais de 70% destas unidades.
Figura 1.9. Partes componentes de um Ultra-fastCT da Imatron (Imatron Inc., divulgação).
Descrição das partes:
A Canhão de Elétrons: permite até 640 mA de po-tência de raios X.
B Feixe de Elétrons: pode ser gerado com tempos da ordem de milisegundos.
C Sistema de refrigeração interno auto-contido: retira todo o calor gerado nos anéis, eliminando o tempo morto entre os cortes e permitindo longos tempos de exames (para volumes grandes).
D Sistema de Aquisição de Dados: desenvolvido para permitir uma aquisição contínua de dados tomográficos.
E Anéis-Alvo: construído de alvos múltiplos (na forma de semi-anéis) para uma varredura otimiza-da de corte simples ou cortes múltiplos.
F Mesa com Movimento Preciso e Rápido: permi-te o movimento contínuo da mesa para a varredu-ra de volumes.
1.3.7. Tomógrafo Móvel
A Philips Medical System já possui um to-
mógrafo móvel, conhecido como Tomoscan M. Di-vidido em três partes, todas com rodas, o portal (450 kg), a mesa para o paciente (135 kg) e o console de comando podem ser levados a qualquer local do hospital. Com dimensões que permitem passar por portas de 90 cm de largura, inclusive ser levado em elevadores, este sistema diminui o trauma do paciente de ser removido de seu leito para ser levado até a sala de tomografia.
O tomógrafo possui um sistema elétrico que funciona com 4 baterias, o que permite que qualquer tomada de parede de 220 V, com capacidade para 10 Amperes, possa carregar as baterias. Alem da mobi-lidade, o sistema de baterias permite ao tomógrafo funcionar quando há falta de energia elétrica no hos-pital, aliviando o sistema de fornecimento de emer-gência de energia.
Figura 1.10. Tomoscan M, da Philips Medical Sys-
tem: o primeiro tomógrafo móvel (Revista Medica Mundi, Philips Medical Ssytem).
Figura 1.11. Visão frontal do Tomoscan M, em
repouso enquanto carrega as baterias (Revista Me-dica Mundi, Philips Medical Ssytem).
TOMÓGRAFO COMPUTADORIZADO 5
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
1.4 SISTEMA TOMOGRÁFICO
Inicialmente poderíamos dizer que o tomó-grafo de forma geral, independente de sua geração, é constituído de três partes:
a) portal; b) eletrônica de controle; c) console de comando e computador. Estes seriam os itens mais complexos e, com
certeza, os que requerem um maior cuidado por se-rem os mais caros. Há também uma tendência em se reduzir o tamanho e simplificar os componentes que integram um sistema tomográfico, o que acabará re-duzindo as partes do sistema aos três itens citados.
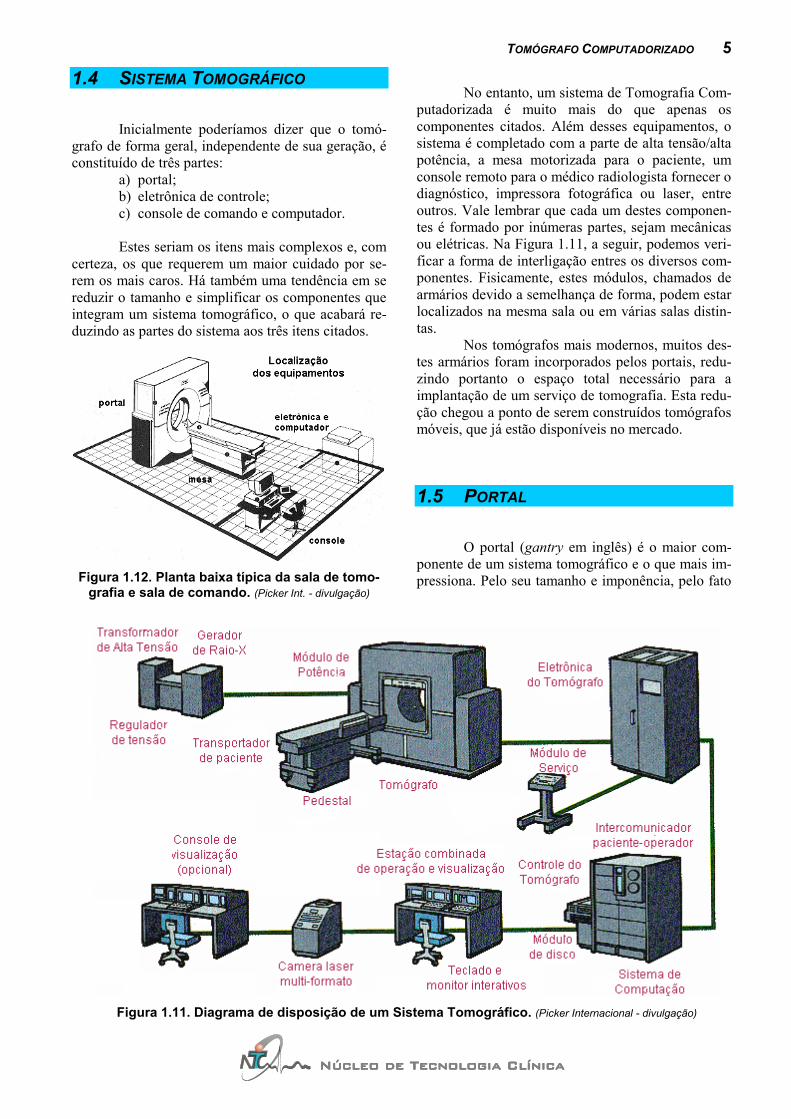
Figura 1.12. Planta baixa típica da sala de tomo-
grafia e sala de comando. (Picker Int. - divulgação)
No entanto, um sistema de Tomografia Com-
putadorizada é muito mais do que apenas os componentes citados. Além desses equipamentos, o sistema é completado com a parte de alta tensão/alta potência, a mesa motorizada para o paciente, um console remoto para o médico radiologista fornecer o diagnóstico, impressora fotográfica ou laser, entre outros. Vale lembrar que cada um destes componen-tes é formado por inúmeras partes, sejam mecânicas ou elétricas. Na Figura 1.11, a seguir, podemos veri-ficar a forma de interligação entres os diversos com-ponentes. Fisicamente, estes módulos, chamados de armários devido a semelhança de forma, podem estar localizados na mesma sala ou em várias salas distin-tas.
Nos tomógrafos mais modernos, muitos des-tes armários foram incorporados pelos portais, redu-zindo portanto o espaço total necessário para a implantação de um serviço de tomografia. Esta redu-ção chegou a ponto de serem construídos tomógrafos móveis, que já estão disponíveis no mercado.
1.5 PORTAL
O portal (gantry em inglês) é o maior com-ponente de um sistema tomográfico e o que mais im-pressiona. Pelo seu tamanho e imponência, pelo fato
Figura 1.11. Diagrama de disposição de um Sistema Tomográfico. (Picker Internacional - divulgação)
6 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
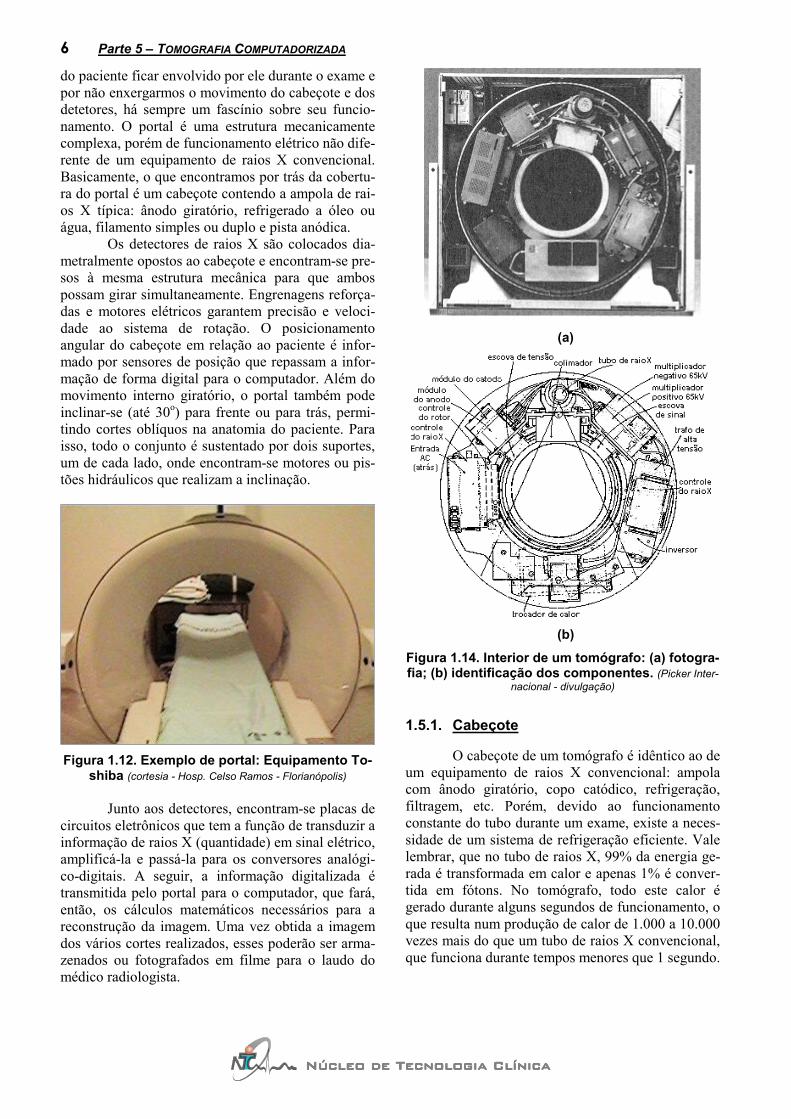
do paciente ficar envolvido por ele durante o exame e por não enxergarmos o movimento do cabeçote e dos detetores, há sempre um fascínio sobre seu funcio-namento. O portal é uma estrutura mecanicamente complexa, porém de funcionamento elétrico não dife-rente de um equipamento de raios X convencional. Basicamente, o que encontramos por trás da cobertu-ra do portal é um cabeçote contendo a ampola de rai-os X típica: ânodo giratório, refrigerado a óleo ou água, filamento simples ou duplo e pista anódica.
Os detectores de raios X são colocados dia-metralmente opostos ao cabeçote e encontram-se pre-sos à mesma estrutura mecânica para que ambos possam girar simultaneamente. Engrenagens reforça-das e motores elétricos garantem precisão e veloci-dade ao sistema de rotação. O posicionamento angular do cabeçote em relação ao paciente é infor-mado por sensores de posição que repassam a infor-mação de forma digital para o computador. Além do movimento interno giratório, o portal também pode inclinar-se (até 30o) para frente ou para trás, permi-tindo cortes oblíquos na anatomia do paciente. Para isso, todo o conjunto é sustentado por dois suportes, um de cada lado, onde encontram-se motores ou pis-tões hidráulicos que realizam a inclinação.
Figura 1.12. Exemplo de portal: Equipamento To-
shiba (cortesia - Hosp. Celso Ramos - Florianópolis) Junto aos detectores, encontram-se placas de
circuitos eletrônicos que tem a função de transduzir a informação de raios X (quantidade) em sinal elétrico, amplificá-la e passá-la para os conversores analógi-co-digitais. A seguir, a informação digitalizada é transmitida pelo portal para o computador, que fará, então, os cálculos matemáticos necessários para a reconstrução da imagem. Uma vez obtida a imagem dos vários cortes realizados, esses poderão ser arma-zenados ou fotografados em filme para o laudo do médico radiologista.
(a)
(b) Figura 1.14. Interior de um tomógrafo: (a) fotogra-fia; (b) identificação dos componentes. (Picker Inter-
nacional - divulgação)
1.5.1. Cabeçote
O cabeçote de um tomógrafo é idêntico ao de um equipamento de raios X convencional: ampola com ânodo giratório, copo catódico, refrigeração, filtragem, etc. Porém, devido ao funcionamento constante do tubo durante um exame, existe a neces-sidade de um sistema de refrigeração eficiente. Vale lembrar, que no tubo de raios X, 99% da energia ge-rada é transformada em calor e apenas 1% é conver-tida em fótons. No tomógrafo, todo este calor é gerado durante alguns segundos de funcionamento, o que resulta num produção de calor de 1.000 a 10.000 vezes mais do que um tubo de raios X convencional, que funciona durante tempos menores que 1 segundo.
TOMÓGRAFO COMPUTADORIZADO 7
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
(b)
Figura 1.15. Portal do Elscint 1800 (cortesia - Hosp. Regional Hans Schimidt - Joinville)
Na prática, existe uma medida para avaliar a
produção de calor no tubo de raios X. Como o calor também é uma forma de energia, procura-se compa-rar a energia dos elétrons com a energia térmica. Se os elétrons são acelerados com uma energia de 100 kV, os 99% deles que não se transformarem em fó-tons de raios X irão produzir 100 kV de calor. Além disso, a quantidade de elétrons com esta energia é dada pelo ajuste da corrente no tubo. Logo, a produ-ção de calor será o resultado da quantidade de elé-trons (corrente) que possuem uma determinada energia (tensão). Por fim, devemos lembrar que o tempo em que o tubo fica ligado também influencia na geração de calor. Assim podemos escrever a equa-ção da geração de calor em função da tensão, corren-te e tempo. Teríamos, por conseguinte, a seguinte equação da Energia Térmica:
smAkVET ××= cujo resultado é me-dido em HU (Heat Unit, ou, traduzindo, unidades de calor).
Vejamos como exemplo, a comparação entre um exame de tórax com a técnica de raios X conven-cional e a realização de um único corte de um exame de tórax num TC.
Convencional ⇒ 80 kV , 200 mA , 0,05 s (10 mAs)
HUsmAkVET 80005,020080 =××= Tomografia ⇒ 120 kV , 200 mA, 1 s
HUsmAkVET 240001200120 =××= Se ainda considerarmos que num exame de
tórax na TC são realizados em média 20 cortes, em questão de 30 segundos, a ampola sofrerá a ação de uma energia térmica na ordem de 500 mil HU (20 x 24.000 HU).
Nas especificações dos fabricantes, as ampo-las são dimensionadas para suportarem acima de 1 milhão de HU. Para haver uma melhor dissipação deste calor imenso nas ampolas, alguns ajustes foram introduzidos no desenvolvimento das mesmas: a ve-locidade de rotação do motor do ânodo giratório é maior; o vidro da ampola é mais fino e de melhor condutividade térmica; e o sistema de refrigeração é muito mais sofisticado. Alguns fabricantes têm de-senvolvido ampolas de ligas de alumínio e metais nobres em substituição ao vidro para a melhoria da condutividade térmica e também para diminuir o pe-so do tubo, o que é muito importante num sistema giratório.
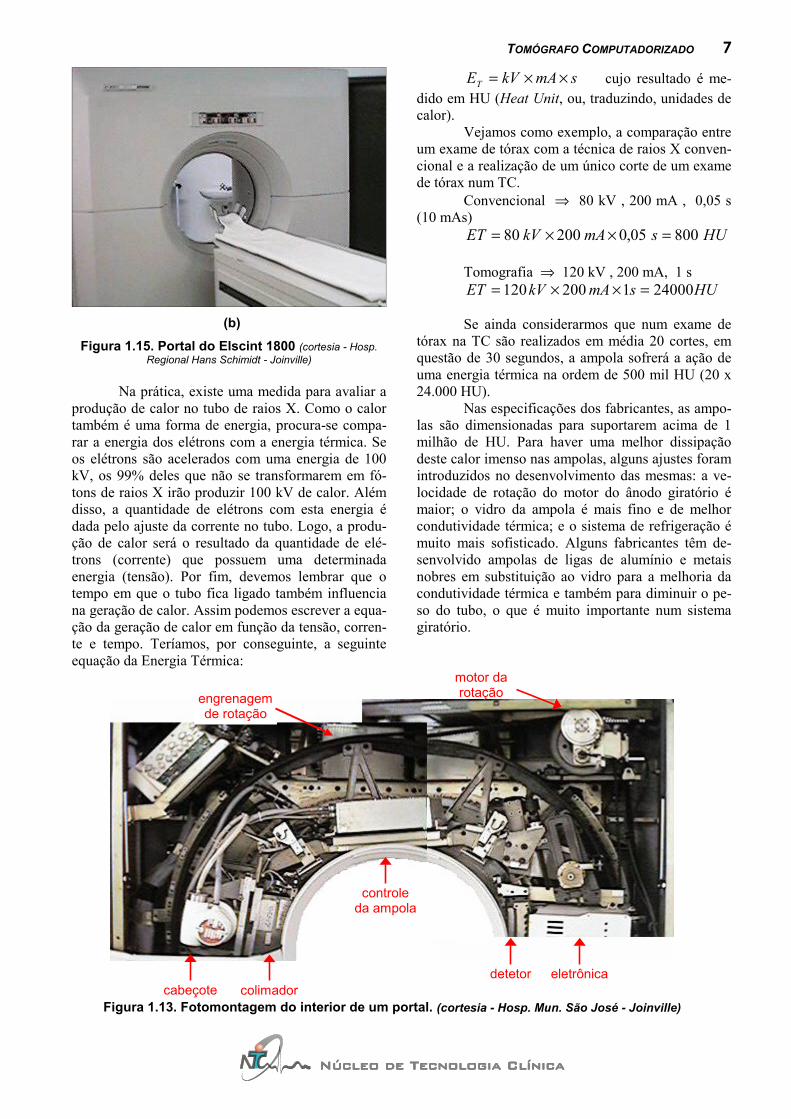
Figura 1.13. Fotomontagem do interior de um portal. (cortesia - Hosp. Mun. São José - Joinville) cabeçote colimador
detetor eletrônica
controle da ampola
motor da rotação engrenagem
de rotação
8 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
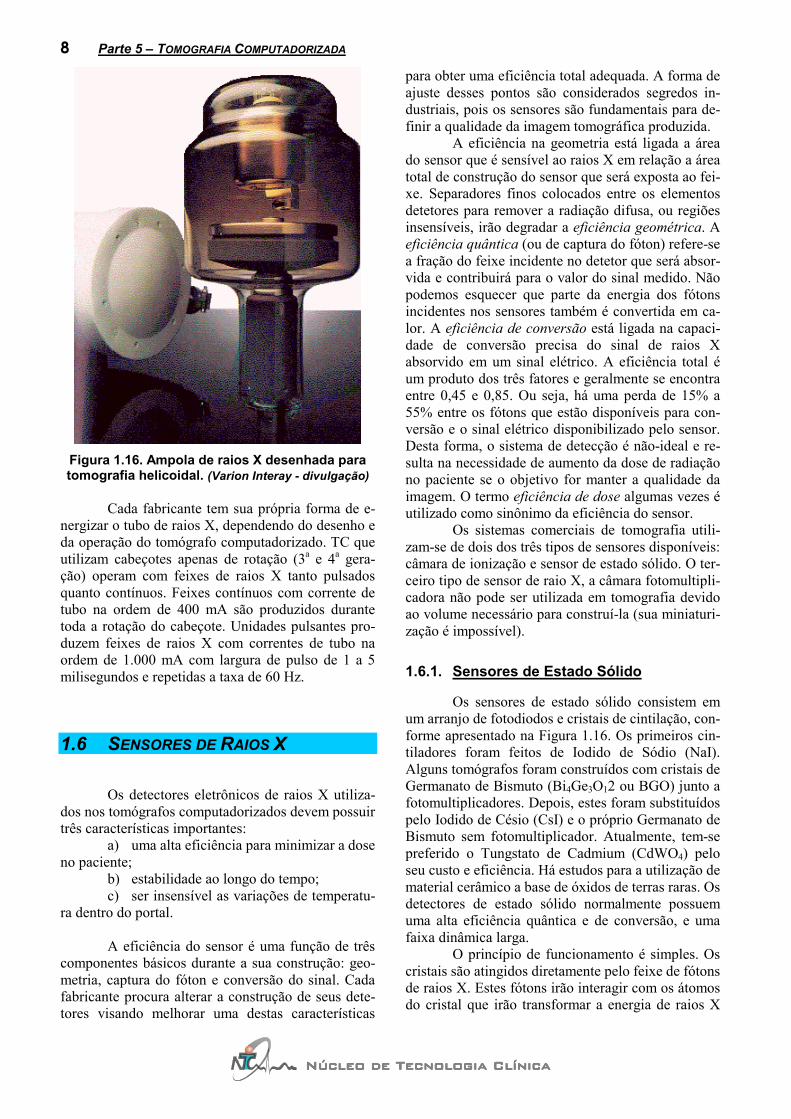
Figura 1.16. Ampola de raios X desenhada para tomografia helicoidal. (Varion Interay - divulgação)
Cada fabricante tem sua própria forma de e-
nergizar o tubo de raios X, dependendo do desenho e da operação do tomógrafo computadorizado. TC que utilizam cabeçotes apenas de rotação (3a e 4a gera-ção) operam com feixes de raios X tanto pulsados quanto contínuos. Feixes contínuos com corrente de tubo na ordem de 400 mA são produzidos durante toda a rotação do cabeçote. Unidades pulsantes pro-duzem feixes de raios X com correntes de tubo na ordem de 1.000 mA com largura de pulso de 1 a 5 milisegundos e repetidas a taxa de 60 Hz.
1.6 SENSORES DE RAIOS X
Os detectores eletrônicos de raios X utiliza-dos nos tomógrafos computadorizados devem possuir três características importantes:
a) uma alta eficiência para minimizar a dose no paciente;
b) estabilidade ao longo do tempo; c) ser insensível as variações de temperatu-
ra dentro do portal. A eficiência do sensor é uma função de três
componentes básicos durante a sua construção: geo-metria, captura do fóton e conversão do sinal. Cada fabricante procura alterar a construção de seus dete-tores visando melhorar uma destas características
para obter uma eficiência total adequada. A forma de ajuste desses pontos são considerados segredos in-dustriais, pois os sensores são fundamentais para de-finir a qualidade da imagem tomográfica produzida.
A eficiência na geometria está ligada a área do sensor que é sensível ao raios X em relação a área total de construção do sensor que será exposta ao fei-xe. Separadores finos colocados entre os elementos detetores para remover a radiação difusa, ou regiões insensíveis, irão degradar a eficiência geométrica. A eficiência quântica (ou de captura do fóton) refere-se a fração do feixe incidente no detetor que será absor-vida e contribuirá para o valor do sinal medido. Não podemos esquecer que parte da energia dos fótons incidentes nos sensores também é convertida em ca-lor. A eficiência de conversão está ligada na capaci-dade de conversão precisa do sinal de raios X absorvido em um sinal elétrico. A eficiência total é um produto dos três fatores e geralmente se encontra entre 0,45 e 0,85. Ou seja, há uma perda de 15% a 55% entre os fótons que estão disponíveis para con-versão e o sinal elétrico disponibilizado pelo sensor. Desta forma, o sistema de detecção é não-ideal e re-sulta na necessidade de aumento da dose de radiação no paciente se o objetivo for manter a qualidade da imagem. O termo eficiência de dose algumas vezes é utilizado como sinônimo da eficiência do sensor.
Os sistemas comerciais de tomografia utili-zam-se de dois dos três tipos de sensores disponíveis: câmara de ionização e sensor de estado sólido. O ter-ceiro tipo de sensor de raio X, a câmara fotomultipli-cadora não pode ser utilizada em tomografia devido ao volume necessário para construí-la (sua miniaturi-zação é impossível).
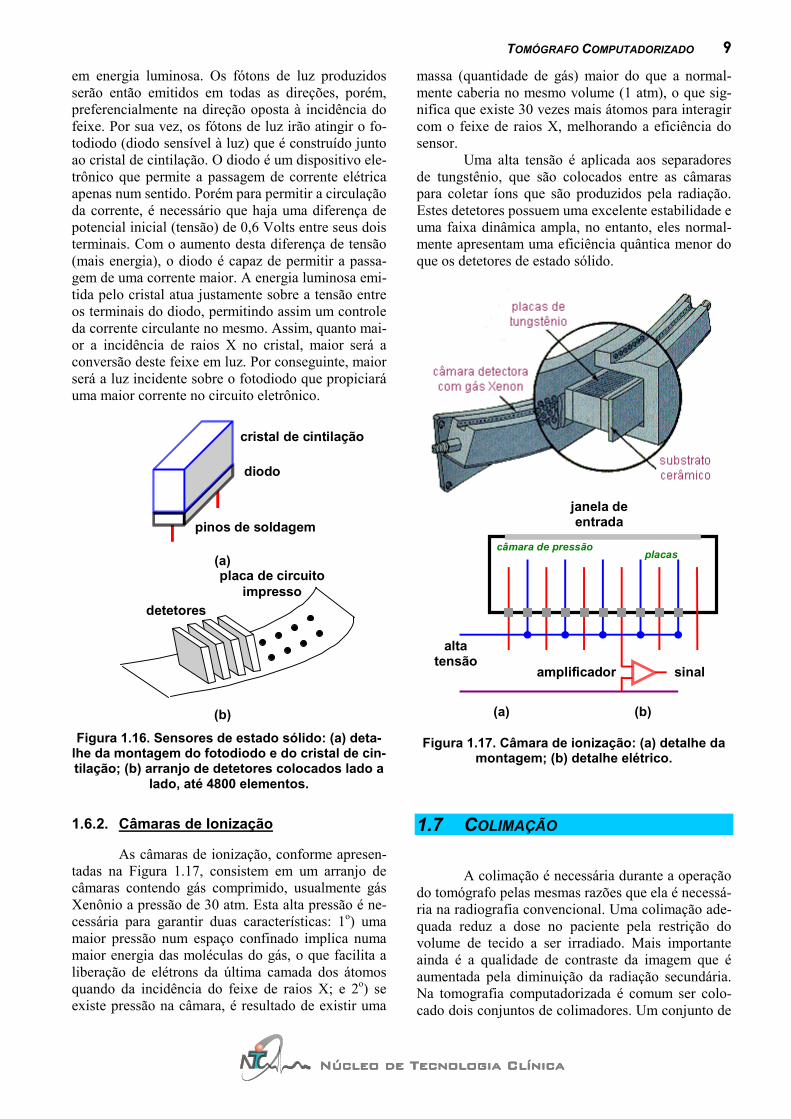
1.6.1. Sensores de Estado Sólido
Os sensores de estado sólido consistem em um arranjo de fotodiodos e cristais de cintilação, con-forme apresentado na Figura 1.16. Os primeiros cin-tiladores foram feitos de Iodido de Sódio (NaI). Alguns tomógrafos foram construídos com cristais de Germanato de Bismuto (Bi4Ge3O12 ou BGO) junto a fotomultiplicadores. Depois, estes foram substituídos pelo Iodido de Césio (CsI) e o próprio Germanato de Bismuto sem fotomultiplicador. Atualmente, tem-se preferido o Tungstato de Cadmium (CdWO4) pelo seu custo e eficiência. Há estudos para a utilização de material cerâmico a base de óxidos de terras raras. Os detectores de estado sólido normalmente possuem uma alta eficiência quântica e de conversão, e uma faixa dinâmica larga.
O princípio de funcionamento é simples. Os cristais são atingidos diretamente pelo feixe de fótons de raios X. Estes fótons irão interagir com os átomos do cristal que irão transformar a energia de raios X
TOMÓGRAFO COMPUTADORIZADO 9
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
em energia luminosa. Os fótons de luz produzidos serão então emitidos em todas as direções, porém, preferencialmente na direção oposta à incidência do feixe. Por sua vez, os fótons de luz irão atingir o fo-todiodo (diodo sensível à luz) que é construído junto ao cristal de cintilação. O diodo é um dispositivo ele-trônico que permite a passagem de corrente elétrica apenas num sentido. Porém para permitir a circulação da corrente, é necessário que haja uma diferença de potencial inicial (tensão) de 0,6 Volts entre seus dois terminais. Com o aumento desta diferença de tensão (mais energia), o diodo é capaz de permitir a passa-gem de uma corrente maior. A energia luminosa emi-tida pelo cristal atua justamente sobre a tensão entre os terminais do diodo, permitindo assim um controle da corrente circulante no mesmo. Assim, quanto mai-or a incidência de raios X no cristal, maior será a conversão deste feixe em luz. Por conseguinte, maior será a luz incidente sobre o fotodiodo que propiciará uma maior corrente no circuito eletrônico.
cristal de cintilação
diodo
pinos de soldagem
(a)
detetores
placa de circuitoimpresso
(b) Figura 1.16. Sensores de estado sólido: (a) deta-
lhe da montagem do fotodiodo e do cristal de cin-tilação; (b) arranjo de detetores colocados lado a
lado, até 4800 elementos.
1.6.2. Câmaras de Ionização
As câmaras de ionização, conforme apresen-tadas na Figura 1.17, consistem em um arranjo de câmaras contendo gás comprimido, usualmente gás Xenônio a pressão de 30 atm. Esta alta pressão é ne-cessária para garantir duas características: 1o) uma maior pressão num espaço confinado implica numa maior energia das moléculas do gás, o que facilita a liberação de elétrons da última camada dos átomos quando da incidência do feixe de raios X; e 2o) se existe pressão na câmara, é resultado de existir uma
massa (quantidade de gás) maior do que a normal-mente caberia no mesmo volume (1 atm), o que sig-nifica que existe 30 vezes mais átomos para interagir com o feixe de raios X, melhorando a eficiência do sensor.
Uma alta tensão é aplicada aos separadores de tungstênio, que são colocados entre as câmaras para coletar íons que são produzidos pela radiação. Estes detetores possuem uma excelente estabilidade e uma faixa dinâmica ampla, no entanto, eles normal-mente apresentam uma eficiência quântica menor do que os detetores de estado sólido.
janela deentrada
altatensão
amplificador sinal
câmara de pressãoplacas
(a) (b)
Figura 1.17. Câmara de ionização: (a) detalhe da montagem; (b) detalhe elétrico.
1.7 COLIMAÇÃO
A colimação é necessária durante a operação do tomógrafo pelas mesmas razões que ela é necessá-ria na radiografia convencional. Uma colimação ade-quada reduz a dose no paciente pela restrição do volume de tecido a ser irradiado. Mais importante ainda é a qualidade de contraste da imagem que é aumentada pela diminuição da radiação secundária. Na tomografia computadorizada é comum ser colo-cado dois conjuntos de colimadores. Um conjunto de

10 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
colimador é montado junto ao cabeçote (pré-paciente) e ajuda a controlar a dose de radiação no paciente.
O outro conjunto de colimadores é colocado logo a frente dos detetores (pós-paciente) e influencia na qualidade da imagem pois reduz a radiação secun-dária, define a espessura do corte e também limita o campo de visão ou largura do corte (scan diamenter ou field of view).
Figura 1.18. Colimação da câmara de ionização (cortesia Hospital Celso Ramos - Florianópolis).
1.8 SISTEMA ELÉTRICO
Todos os tomógrafos computadorizados tra-balham com tensão de tubo (kVp) fornecida por sis-temas trifásicos ou de alta freqüência. Isto garante a eficiência do sistema pois garante que a produção de fótons será constante durante todo o exame e o feixe terá sempre o mesmo espectro. Os sistemas de alta freqüência têm sido preferidos pelos fabricantes no desenvolvimento de TC mais modernos pois permi-tem a compactação dos circuitos eletro-eletrônicos, permitindo que o sistema de potência seja instalado dentro do próprio portal. Há, então, uma grande eco-nomia de espaço físico na sala, pois se diminuí um armário, e ganhe-se também na facilidade e baratea-mento do custo de manutenção.
motores que acionam os colimadores
colimadores
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
2. FORMAÇÃO DO TOMOGRAMA
2.1 INTRODUÇÃO
A criação do tomógrafo computadorizado só foi possível por causa da matemática desenvolvida especialmente para a tomografia. Graças ao matemá-tico e médico Allan Cormack foi possível que o to-mógrafo de Sir Godfrey Hounsfield tornasse-se realidade. Esta matemática permite que as informa-ções confusas vindo dos sensores de raios X, que são semelhantes às imagens de uma radiografia conven-cional, possam ser trabalhadas e dêem origem às i-magens de cortes transversais da anatomia do paciente.
Figura 2.1 Allan Cormack
Por seu trabalho matemático que deu suporte
ao uso da tomografia computadorizada como um meio eficiente de diagnóstico por imagem, Allan Cormack recebeu o prêmio Nobel de Medicina em 1979, juntamente com Sir Godfrey Hounsfield.
2.2 REPRESENTAÇÃO DA IMAGEM
Para entendermos melhor como é gerado um tomograma, primeiro temos que entender como o computador trabalha com a imagem. A imagem que é apresentada ao técnico ou ao radiologista, seja no monitor ou seja no filme, é formado pela diferente coloração em níveis de cinza de milhares de pontos. Assim, como ocorre no televisor, a imagem obtida do corte da anatomia é na realidade um conjunto de pon-
tos com tons diferentes. É como se a imagem fosse dividida em uma matriz de N x N pontos.
Atualmente, a imagem tomográfica é gerada com matrizes a partir de 256 x 256 pontos, passando por 320 x 320 até 512 x 512 pontos. Equipamentos mais modernos chegam a trabalhar com matrizes de 1024 x 1024 pontos, o que significa dividir a imagem em mais de 1 milhão de pontos.
E o trabalho do equipamento tomográfico, juntamente com o computador, é justamente definir, indiretamente, o valor da densidade daquela pequena porção de tecido humano que cada um destes pontos está representando. Se houver uma mínima diferença de densidades entre dois pontos consecutivos, então o computador atribuirá um tom de cinza diferente para cada um dos pontos, resultando no contraste que le-vará ao diagnóstico médico.
2.2.1. Elementos Fotográficos
A menor unidade de dimensão ou de imagem do tomograma computadorizado é o ponto fotográfi-co, conhecido em inglês por pixel (picture element), conforme demos uma idéia acima. O pixel não tem uma dimensão ou comprimento definido pois depen-de do tamanho do campo de visão e da matriz de i-magem. Assim, a escolha dos dois pelo técnico irá determinar que o pixel represente uma certa porção da área transversal ou corte realizado no paciente.
O campo de visão, ou field of view (FOV), ou ainda scan diamenter, é um valor fornecido pelo téc-nico operador quando da realização de cada exame. Este valor está diretamente relacionado com a região do exame: para crânio, o campo de visão é da ordem de 24 cm, para tórax/abdômen utiliza-se 35 cm ou 42 cm (paciente obeso). Os valores permitidos para o FOV podem ser fixos (3 ou 4 valores) nos equipa-mentos mais antigos, ou ajustáveis de 1 em 1 cm nos tomógrafos mais modernos. A definição desta medi-ada pelo técnico permitirá a visualização da imagem com a melhor resolução possível dentro dos limites do equipamento. Por isso, quando o equipamento permitir a definição exata do campo de visão, o téc-nico deverá utilizar o espessômetro para medir o pa-ciente e com isso informar ao computador a medida exata.
12 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
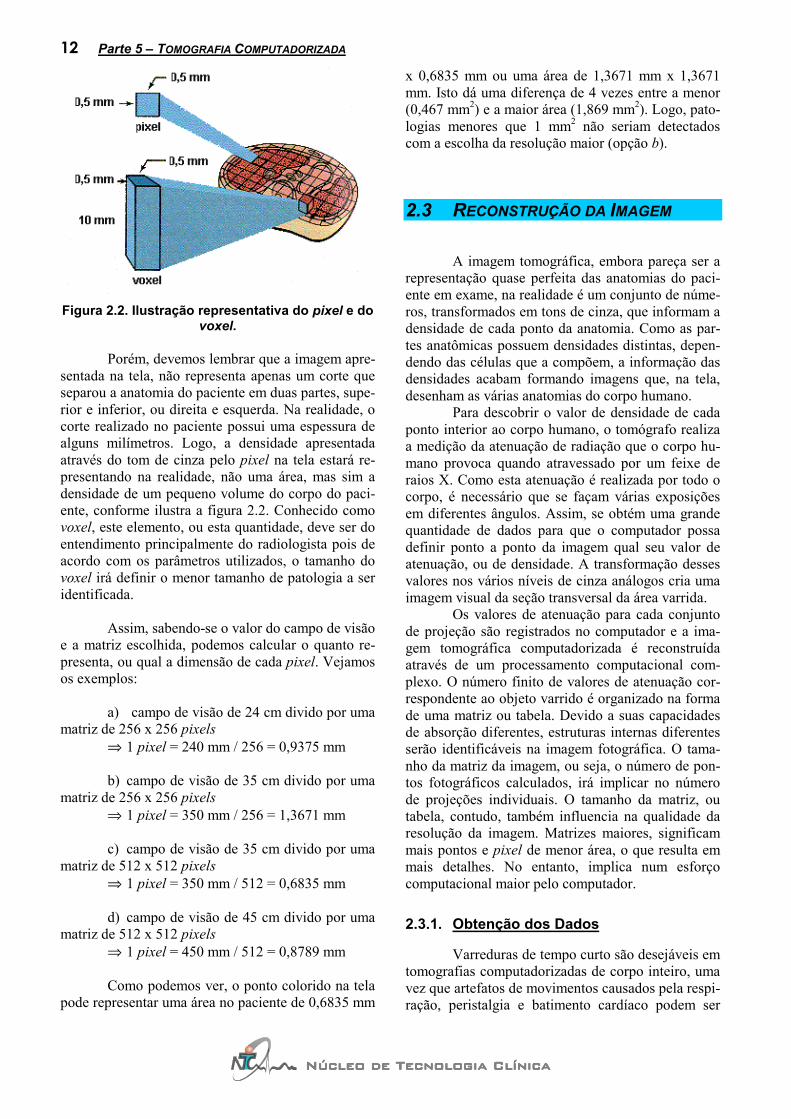
Figura 2.2. Ilustração representativa do pixel e do
voxel. Porém, devemos lembrar que a imagem apre-
sentada na tela, não representa apenas um corte que separou a anatomia do paciente em duas partes, supe-rior e inferior, ou direita e esquerda. Na realidade, o corte realizado no paciente possui uma espessura de alguns milímetros. Logo, a densidade apresentada através do tom de cinza pelo pixel na tela estará re-presentando na realidade, não uma área, mas sim a densidade de um pequeno volume do corpo do paci-ente, conforme ilustra a figura 2.2. Conhecido como voxel, este elemento, ou esta quantidade, deve ser do entendimento principalmente do radiologista pois de acordo com os parâmetros utilizados, o tamanho do voxel irá definir o menor tamanho de patologia a ser identificada.
Assim, sabendo-se o valor do campo de visão
e a matriz escolhida, podemos calcular o quanto re-presenta, ou qual a dimensão de cada pixel. Vejamos os exemplos:
a) campo de visão de 24 cm divido por uma
matriz de 256 x 256 pixels ⇒ 1 pixel = 240 mm / 256 = 0,9375 mm b) campo de visão de 35 cm divido por uma
matriz de 256 x 256 pixels ⇒ 1 pixel = 350 mm / 256 = 1,3671 mm c) campo de visão de 35 cm divido por uma
matriz de 512 x 512 pixels ⇒ 1 pixel = 350 mm / 512 = 0,6835 mm d) campo de visão de 45 cm divido por uma
matriz de 512 x 512 pixels ⇒ 1 pixel = 450 mm / 512 = 0,8789 mm Como podemos ver, o ponto colorido na tela
pode representar uma área no paciente de 0,6835 mm
x 0,6835 mm ou uma área de 1,3671 mm x 1,3671 mm. Isto dá uma diferença de 4 vezes entre a menor (0,467 mm2) e a maior área (1,869 mm2). Logo, pato-logias menores que 1 mm2 não seriam detectados com a escolha da resolução maior (opção b).
2.3 RECONSTRUÇÃO DA IMAGEM
A imagem tomográfica, embora pareça ser a representação quase perfeita das anatomias do paci-ente em exame, na realidade é um conjunto de núme-ros, transformados em tons de cinza, que informam a densidade de cada ponto da anatomia. Como as par-tes anatômicas possuem densidades distintas, depen-dendo das células que a compõem, a informação das densidades acabam formando imagens que, na tela, desenham as várias anatomias do corpo humano.
Para descobrir o valor de densidade de cada ponto interior ao corpo humano, o tomógrafo realiza a medição da atenuação de radiação que o corpo hu-mano provoca quando atravessado por um feixe de raios X. Como esta atenuação é realizada por todo o corpo, é necessário que se façam várias exposições em diferentes ângulos. Assim, se obtém uma grande quantidade de dados para que o computador possa definir ponto a ponto da imagem qual seu valor de atenuação, ou de densidade. A transformação desses valores nos vários níveis de cinza análogos cria uma imagem visual da seção transversal da área varrida.
Os valores de atenuação para cada conjunto de projeção são registrados no computador e a ima-gem tomográfica computadorizada é reconstruída através de um processamento computacional com-plexo. O número finito de valores de atenuação cor-respondente ao objeto varrido é organizado na forma de uma matriz ou tabela. Devido a suas capacidades de absorção diferentes, estruturas internas diferentes serão identificáveis na imagem fotográfica. O tama-nho da matriz da imagem, ou seja, o número de pon-tos fotográficos calculados, irá implicar no número de projeções individuais. O tamanho da matriz, ou tabela, contudo, também influencia na qualidade da resolução da imagem. Matrizes maiores, significam mais pontos e pixel de menor área, o que resulta em mais detalhes. No entanto, implica num esforço computacional maior pelo computador.
2.3.1. Obtenção dos Dados
Varreduras de tempo curto são desejáveis em tomografias computadorizadas de corpo inteiro, uma vez que artefatos de movimentos causados pela respi-ração, peristalgia e batimento cardíaco podem ser
FORMAÇÃO DO TOMOGRAMA 13
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
desta forma eliminados. Sistemas de varreduras len-tas com movimentos alternados e de contra-rotação estão, contudo, sendo substituídos por sistemas de rotação contínua, que apresentam tempos mais curtos de varredura. Por isso, o tempo de realização do e-xame, que em alguns equipamentos pode ser ajustado pelo técnico, também pode ajudar na melhora da qua-lidade da imagem.
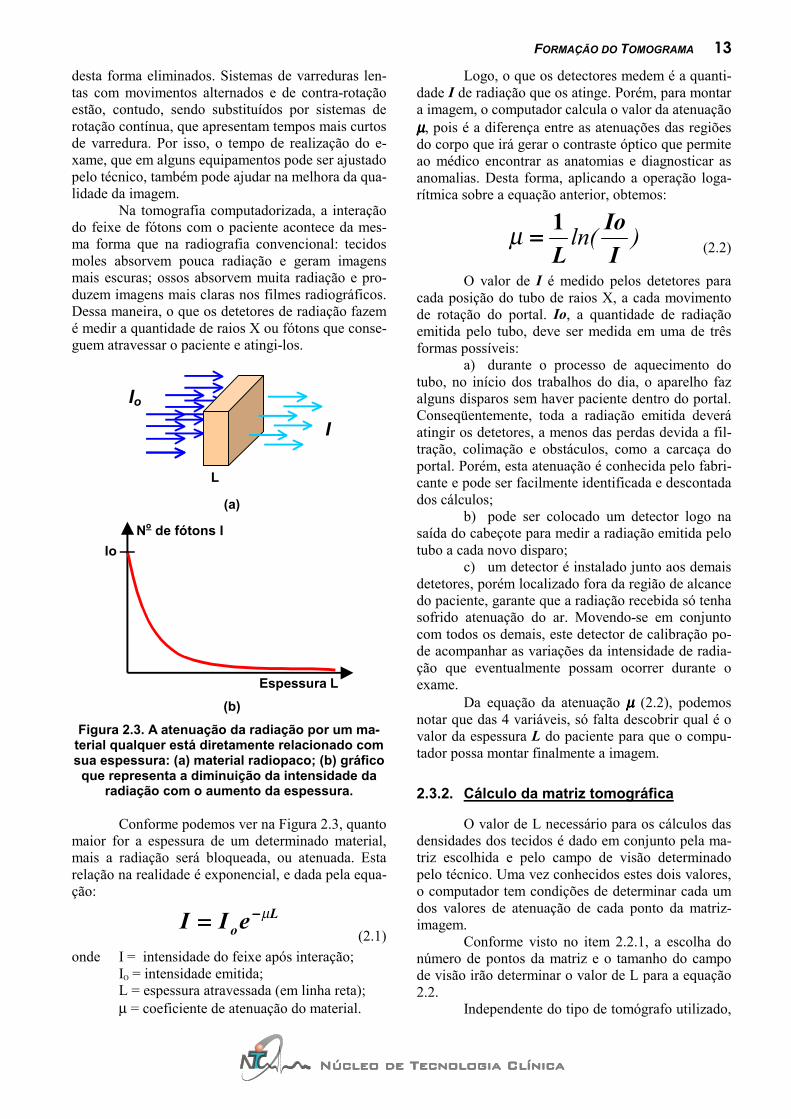
Na tomografia computadorizada, a interação do feixe de fótons com o paciente acontece da mes-ma forma que na radiografia convencional: tecidos moles absorvem pouca radiação e geram imagens mais escuras; ossos absorvem muita radiação e pro-duzem imagens mais claras nos filmes radiográficos. Dessa maneira, o que os detetores de radiação fazem é medir a quantidade de raios X ou fótons que conse-guem atravessar o paciente e atingi-los.
L
Io I
(a)
No de fótons I
Espessura L
Io
(b) Figura 2.3. A atenuação da radiação por um ma-
terial qualquer está diretamente relacionado com sua espessura: (a) material radiopaco; (b) gráfico
que representa a diminuição da intensidade da radiação com o aumento da espessura.
Conforme podemos ver na Figura 2.3, quanto
maior for a espessura de um determinado material, mais a radiação será bloqueada, ou atenuada. Esta relação na realidade é exponencial, e dada pela equa-ção:
L
oeII µ−−−−==== (2.1)
onde I = intensidade do feixe após interação; IO = intensidade emitida; L = espessura atravessada (em linha reta); µ = coeficiente de atenuação do material.
Logo, o que os detectores medem é a quanti-dade I de radiação que os atinge. Porém, para montar a imagem, o computador calcula o valor da atenuação µµµµ, pois é a diferença entre as atenuações das regiões do corpo que irá gerar o contraste óptico que permite ao médico encontrar as anatomias e diagnosticar as anomalias. Desta forma, aplicando a operação loga-rítmica sobre a equação anterior, obtemos:
)ln(IIo
L1====µ (2.2)
O valor de I é medido pelos detetores para cada posição do tubo de raios X, a cada movimento de rotação do portal. Io, a quantidade de radiação emitida pelo tubo, deve ser medida em uma de três formas possíveis:
a) durante o processo de aquecimento do tubo, no início dos trabalhos do dia, o aparelho faz alguns disparos sem haver paciente dentro do portal. Conseqüentemente, toda a radiação emitida deverá atingir os detetores, a menos das perdas devida a fil-tração, colimação e obstáculos, como a carcaça do portal. Porém, esta atenuação é conhecida pelo fabri-cante e pode ser facilmente identificada e descontada dos cálculos;
b) pode ser colocado um detector logo na saída do cabeçote para medir a radiação emitida pelo tubo a cada novo disparo;
c) um detector é instalado junto aos demais detetores, porém localizado fora da região de alcance do paciente, garante que a radiação recebida só tenha sofrido atenuação do ar. Movendo-se em conjunto com todos os demais, este detector de calibração po-de acompanhar as variações da intensidade de radia-ção que eventualmente possam ocorrer durante o exame.
Da equação da atenuação µµµµ (2.2), podemos notar que das 4 variáveis, só falta descobrir qual é o valor da espessura L do paciente para que o compu-tador possa montar finalmente a imagem.
2.3.2. Cálculo da matriz tomográfica
O valor de L necessário para os cálculos das densidades dos tecidos é dado em conjunto pela ma-triz escolhida e pelo campo de visão determinado pelo técnico. Uma vez conhecidos estes dois valores, o computador tem condições de determinar cada um dos valores de atenuação de cada ponto da matriz-imagem.
Conforme visto no item 2.2.1, a escolha do número de pontos da matriz e o tamanho do campo de visão irão determinar o valor de L para a equação 2.2.
Independente do tipo de tomógrafo utilizado,

14 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
o resultado de cada corte realizado será uma quanti-dade enorme de valores de intensidade de radiação detectados pelos sensores em cada uma das posições de corte. E desta forma, a reconstrução da imagem a partir destas medidas também será o mesmo para qualquer tomógrafo. A equação fundamental é aquela apresenta pela equação 2.1. No entanto, com a ajuda da figura 2.4, podemos notar que a espessura que a-tenuará o feixe de fótons é equivalente ao campo de visão especificado pelo técnico.
Ix1
Ix2 Iy1
Iy2
Io
Io
Io Io
L
Figura 2.4. Seção transversal de um objeto divi-dido em 8 x 8 partes, onde foram incididos 4 fei-xes distintos e avaliada a atenuação provocada.
Porém se utilizarmos a equação 2.2 para veri-
ficarmos o coeficiente de atenuação do material ire-mos apenas calcular um coeficiente total para todo comprimento L. Isto significa dizer que os 25 cm de espessura do paciente, por exemplo, é feito de um tecido único e homogêneo. Sabemos que isto não é verdade. Com o auxílio da divisão do corte tomográ-fico em milhares de pontos pela matriz escolhida, devemos adaptar as equações 2.1 e 2.2 para o nosso objetivo.
Se o feixe de fótons irá atravessar, digamos, 8 regiões de densidades diferentes, então teremos 8 processos distintos de atenuação. A figura 2.5 ajuda a visualizar este processo.
L1 L2 L3 L4 L5 L6 L7 L8
IO I µµµµ1 µµµµ2 µµµµ3 µµµµ4 µµµµ5 µµµµ6 µµµµ7 µµµµ8
I1 I2 I3 I4 I5 I7 I6
Figura 2.5. Detalhe de uma das colunas da seção
transversal apresentada na figura 2.4. Assim, equacionando para cada uma das fati-
as a relação entre a radiação incidente e a radiação remanescente, teremos:
1101
LeII µ−= (2.3)
2212
LeII µ−= (2.4)
3323
LeII µ−= (2.5)
e assim por diante. Genericamente, temos:
nnLnn eII µ−
−= 1 (2.6)
Fazendo-se a inclusão da equação 2.4 na e-quação 2.3, e a equação 2.5 na equação 2.4, e assim por diante até o total de fatias, obteremos a equação da radiação remanescente após a interação coma to-das as fatias.
))...()(( 22110
nn LLLn eeeIII µµµ −−−== (2.7)
Pela propriedade de associação das potên-cias, podemos simplificar a equação 2.7 para:
)...(
02211 nn LLLeII µµµ ++−= (2.8)
Logo, podemos verificar que há a necessida-de de se determinar não apenas um, mas vários coefi-cientes de atenuação e vários comprimentos ou dimensões para cada uma das fatias.
Se retornarmos a equação original 2.1, po-demos verificar que ambas são a mesma, desde que consideremos nn LLLLL µµµµµ ++++= ...332211 (2.9)
A partir desta relação podemos concluir que o valor de L1 a Ln pode ser definido como sendo um valor único L, definido pelo técnico ao escolher a matriz da imagem e o campo de visão. Ou seja, L se-rá o comprimento do pixel. Logo a equação 2.9 passa a ter uma única incógnita: LL n )...( 321 µµµµµ ++++= (2.9)
e conseqüentemente, nµµµµµ ++++= ...321 (2.10)
Assim, o valor que o computador calcula ini-
cialmente, )ln(IIo
L1====µ , é a soma das atenuações
parciais provocada por cada fatia (eq. 2.11). Inicial-mente, o computador considera os valores de atenua-ção todos iguais (eq. 2.12), já que a informação que é medida corresponde a soma de todas as atenuações parciais.
Nnµµ = (2.11)
nµµµµ ==== ...321 (2.12)
Para descobrir quanto vale cada atenuação individual, o que irá gerar o contraste na imagem, o computador precisa realizar o cálculo para várias pro-jeções diferentes. Ou seja, a ampola e os detectores terão que girar em torno do paciente e ter conhecimento das atenuações provocadas por vários ângulos de incidência.
Medidas adicionais de diferentes vistas espa-
FORMAÇÃO DO TOMOGRAMA 15
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
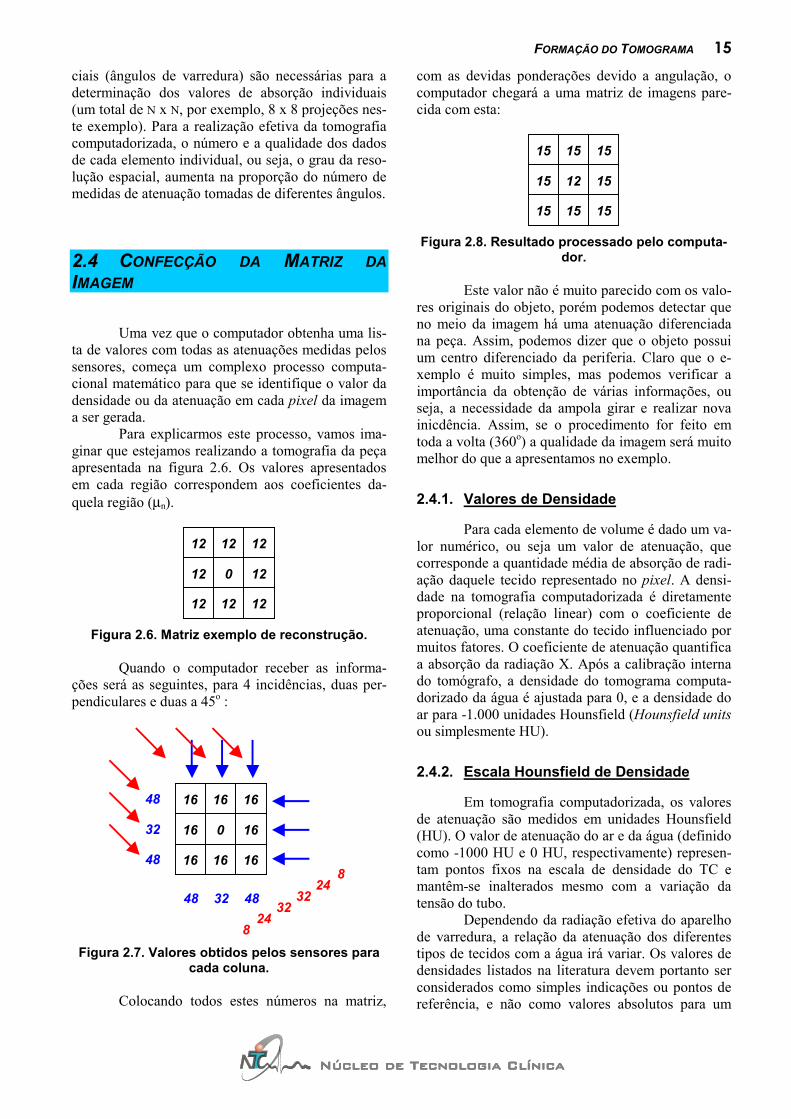
ciais (ângulos de varredura) são necessárias para a determinação dos valores de absorção individuais (um total de N x N, por exemplo, 8 x 8 projeções nes-te exemplo). Para a realização efetiva da tomografia computadorizada, o número e a qualidade dos dados de cada elemento individual, ou seja, o grau da reso-lução espacial, aumenta na proporção do número de medidas de atenuação tomadas de diferentes ângulos.
2.4 CONFECÇÃO DA MATRIZ DA IMAGEM
Uma vez que o computador obtenha uma lis-ta de valores com todas as atenuações medidas pelos sensores, começa um complexo processo computa-cional matemático para que se identifique o valor da densidade ou da atenuação em cada pixel da imagem a ser gerada.
Para explicarmos este processo, vamos ima-ginar que estejamos realizando a tomografia da peça apresentada na figura 2.6. Os valores apresentados em cada região correspondem aos coeficientes da-quela região (µn).
12
12
12
12
0
12
12
12
12
Figura 2.6. Matriz exemplo de reconstrução. Quando o computador receber as informa-
ções será as seguintes, para 4 incidências, duas per-pendiculares e duas a 45o :
16
16
16
16
0
16
16
16
16
48
32
48
48
32
48
32 32
24
8 24
8 Figura 2.7. Valores obtidos pelos sensores para
cada coluna. Colocando todos estes números na matriz,
com as devidas ponderações devido a angulação, o computador chegará a uma matriz de imagens pare-cida com esta:
15
15
15
15
12
15
15
15
15
Figura 2.8. Resultado processado pelo computa-dor.
Este valor não é muito parecido com os valo-
res originais do objeto, porém podemos detectar que no meio da imagem há uma atenuação diferenciada na peça. Assim, podemos dizer que o objeto possui um centro diferenciado da periferia. Claro que o e-xemplo é muito simples, mas podemos verificar a importância da obtenção de várias informações, ou seja, a necessidade da ampola girar e realizar nova inicdência. Assim, se o procedimento for feito em toda a volta (360o) a qualidade da imagem será muito melhor do que a apresentamos no exemplo.
2.4.1. Valores de Densidade
Para cada elemento de volume é dado um va-lor numérico, ou seja um valor de atenuação, que corresponde a quantidade média de absorção de radi-ação daquele tecido representado no pixel. A densi-dade na tomografia computadorizada é diretamente proporcional (relação linear) com o coeficiente de atenuação, uma constante do tecido influenciado por muitos fatores. O coeficiente de atenuação quantifica a absorção da radiação X. Após a calibração interna do tomógrafo, a densidade do tomograma computa-dorizado da água é ajustada para 0, e a densidade do ar para -1.000 unidades Hounsfield (Hounsfield units ou simplesmente HU).
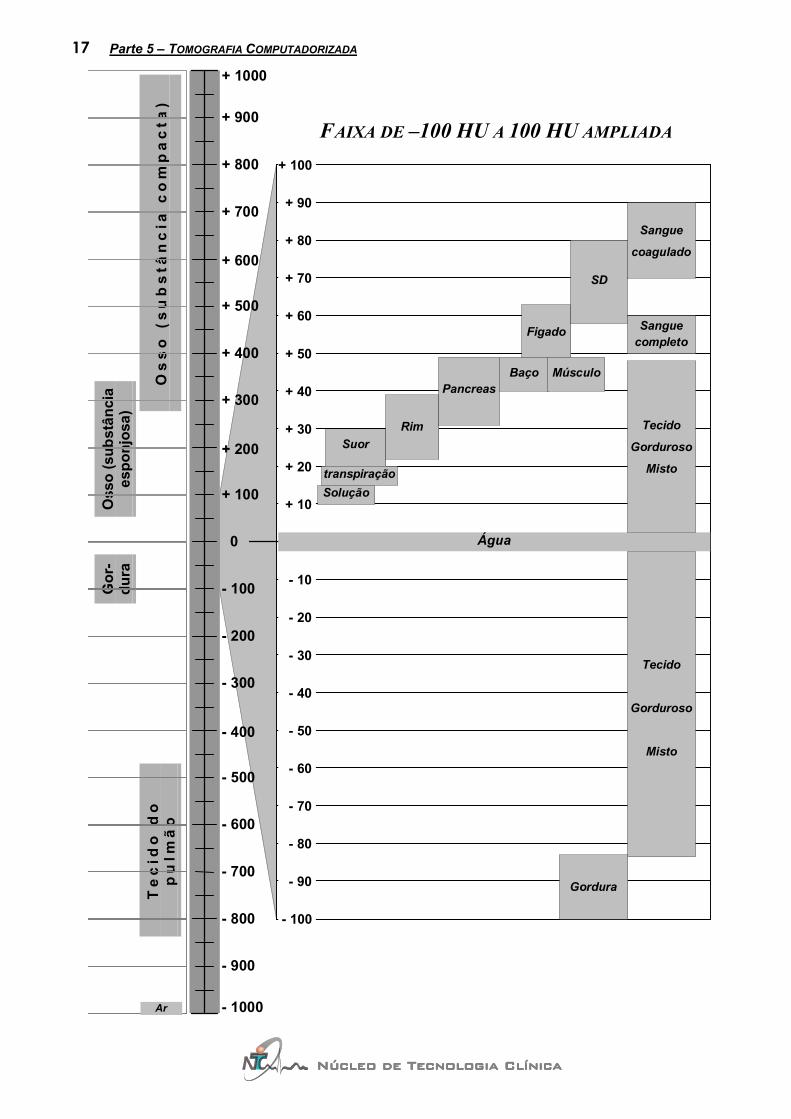
2.4.2. Escala Hounsfield de Densidade
Em tomografia computadorizada, os valores de atenuação são medidos em unidades Hounsfield (HU). O valor de atenuação do ar e da água (definido como -1000 HU e 0 HU, respectivamente) represen-tam pontos fixos na escala de densidade do TC e mantêm-se inalterados mesmo com a variação da tensão do tubo.
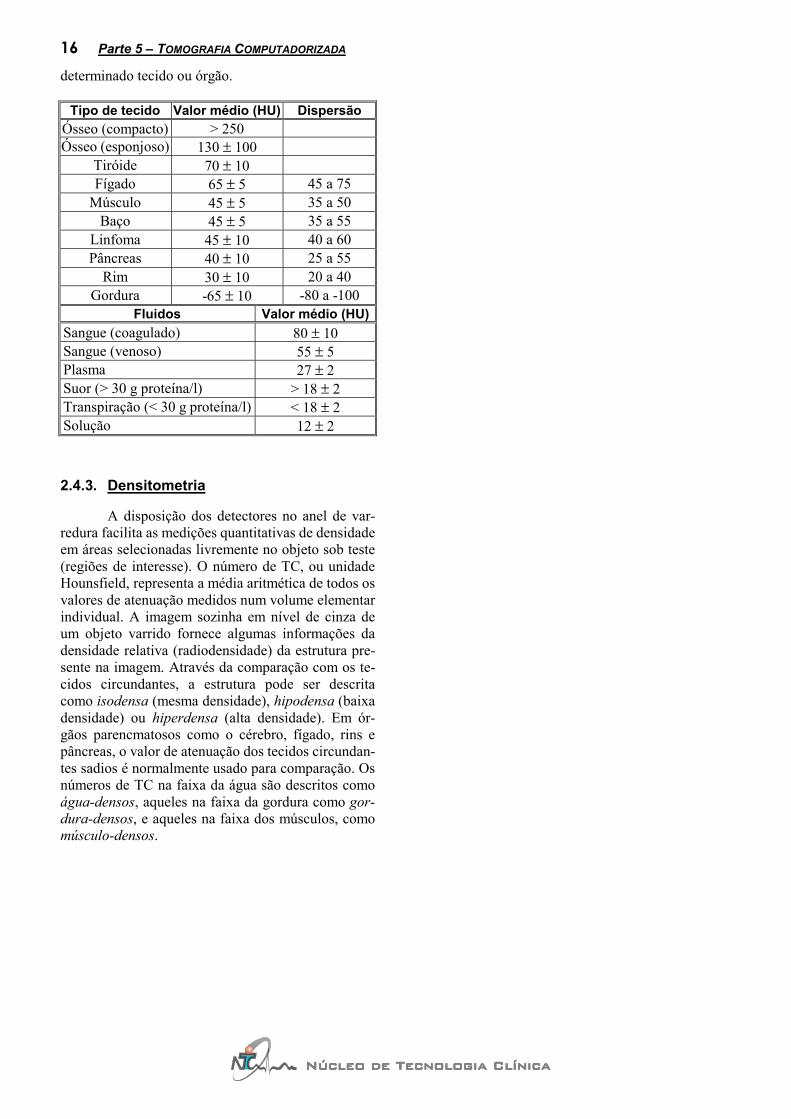
Dependendo da radiação efetiva do aparelho de varredura, a relação da atenuação dos diferentes tipos de tecidos com a água irá variar. Os valores de densidades listados na literatura devem portanto ser considerados como simples indicações ou pontos de referência, e não como valores absolutos para um
16 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
determinado tecido ou órgão.
Tipo de tecido Valor médio (HU) Dispersão Ósseo (compacto) > 250 Ósseo (esponjoso) 130 ± 100
Tiróide 70 ± 10 Fígado 65 ± 5 45 a 75
Músculo 45 ± 5 35 a 50 Baço 45 ± 5 35 a 55
Linfoma 45 ± 10 40 a 60 Pâncreas 40 ± 10 25 a 55
Rim 30 ± 10 20 a 40 Gordura -65 ± 10 -80 a -100
Fluidos Valor médio (HU) Sangue (coagulado) 80 ± 10 Sangue (venoso) 55 ± 5 Plasma 27 ± 2 Suor (> 30 g proteína/l) > 18 ± 2 Transpiração (< 30 g proteína/l) < 18 ± 2 Solução 12 ± 2
2.4.3. Densitometria
A disposição dos detectores no anel de var-redura facilita as medições quantitativas de densidade em áreas selecionadas livremente no objeto sob teste (regiões de interesse). O número de TC, ou unidade Hounsfield, representa a média aritmética de todos os valores de atenuação medidos num volume elementar individual. A imagem sozinha em nível de cinza de um objeto varrido fornece algumas informações da densidade relativa (radiodensidade) da estrutura pre-sente na imagem. Através da comparação com os te-cidos circundantes, a estrutura pode ser descrita como isodensa (mesma densidade), hipodensa (baixa densidade) ou hiperdensa (alta densidade). Em ór-gãos parencmatosos como o cérebro, fígado, rins e pâncreas, o valor de atenuação dos tecidos circundan-tes sadios é normalmente usado para comparação. Os números de TC na faixa da água são descritos como água-densos, aqueles na faixa da gordura como gor-dura-densos, e aqueles na faixa dos músculos, como músculo-densos.
17 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
Os
so
(s
ub
stâ
nc
ia c
om
pa
cta
)
Oss
o (s
ubst
ânci
aes
ponj
osa)
Gor
-du
ra
Te
cid
o d
op
ulm
ão
+ 1000
+ 800
+ 600
+ 400
+ 200
0
- 200
- 800
- 600
- 400
- 1000
+ 100
+ 90
+ 80
+ 70
+ 60
+ 50
+ 40
+ 20
+ 30
+ 10
- 10
- 20
- 30
- 40
- 50
- 60
- 70
- 90
- 80
- 100
Água
Soluçãotranspiração
SuorRim
PancreasBaço Músculo
Figado
SD
Sangue
coagulado
Sanguecompleto
Tecido
Gorduroso
Misto
Tecido
Gorduroso
Misto
Gordura
Ar
+ 900
+ 700
+ 500
+ 300
+ 100
- 100
- 300
- 500
- 700
- 900
FAIXA DE –100 HU A 100 HU AMPLIADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
2.5 VARIAÇÃO DA IMAGEM
Os valores de atenuação para reconstrução da imagem, variando de -1000 HU a +1000 HU, são convencionalmente mostrados numa correspondência com vários níveis de cinza. Contudo, o olho humano normalmente só pode distinguir entre 20 e 30 tons diferentes. Se toda a escala de densidade de 2000 HU fosse apresentada em uma única imagem, o médico radiologista seria capaz de distinguir apenas um tom de cinza dentro da faixa de diagnóstico de importan-tes tecidos moles (a faixa entre –100 HU e 100 HU seria vista pelo radiologista como uma mancha só). Ele não poderia visualizar todas as nuanças densito-métricas mensuráveis pelo computador, e importan-tes informações para o diagnóstico seriam perdidas.
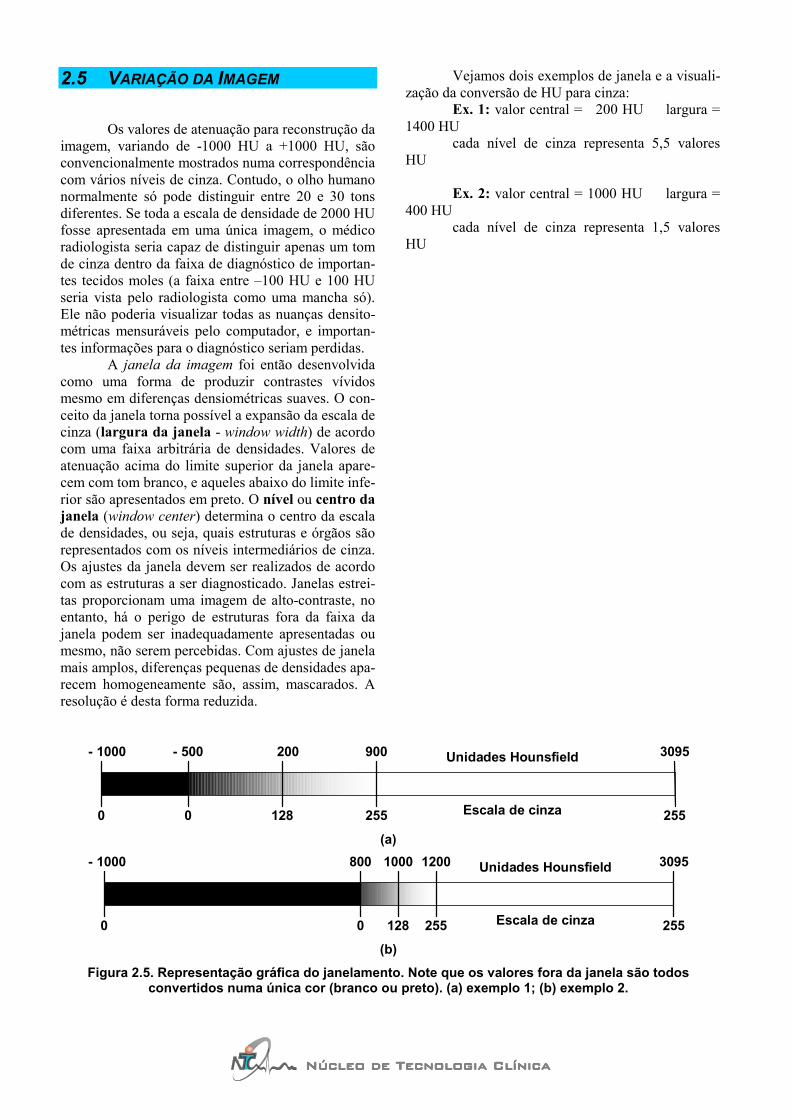
A janela da imagem foi então desenvolvida como uma forma de produzir contrastes vívidos mesmo em diferenças densiométricas suaves. O con-ceito da janela torna possível a expansão da escala de cinza (largura da janela - window width) de acordo com uma faixa arbitrária de densidades. Valores de atenuação acima do limite superior da janela apare-cem com tom branco, e aqueles abaixo do limite infe-rior são apresentados em preto. O nível ou centro da janela (window center) determina o centro da escala de densidades, ou seja, quais estruturas e órgãos são representados com os níveis intermediários de cinza. Os ajustes da janela devem ser realizados de acordo com as estruturas a ser diagnosticado. Janelas estrei-tas proporcionam uma imagem de alto-contraste, no entanto, há o perigo de estruturas fora da faixa da janela podem ser inadequadamente apresentadas ou mesmo, não serem percebidas. Com ajustes de janela mais amplos, diferenças pequenas de densidades apa-recem homogeneamente são, assim, mascarados. A resolução é desta forma reduzida.
Vejamos dois exemplos de janela e a visuali-zação da conversão de HU para cinza:
Ex. 1: valor central = 200 HU largura = 1400 HU
cada nível de cinza representa 5,5 valores HU
Ex. 2: valor central = 1000 HU largura =
400 HU cada nível de cinza representa 1,5 valores
HU
128
200
255
900
0
- 500
255
3095
0
- 1000
Escala de cinza
Unidades Hounsfield
(a)
128
1000
255
1200
0
800
255
3095
0
- 1000
Escala de cinza
Unidades Hounsfield
(b)
Figura 2.5. Representação gráfica do janelamento. Note que os valores fora da janela são todos convertidos numa única cor (branco ou preto). (a) exemplo 1; (b) exemplo 2.
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
3. OPERAÇÃO DO TOMÓGRAFO
3.1 INTRODUÇÃO
Diferentemente do que ocorre com o equi-pamento de raios X convencional, na Tomografia Computadorizada, o técnico trabalha muito mais na obtenção da imagem para diagnóstico, ou seja, no console de comando, do que no posicionamento do paciente. Apenas para lembrar, cada anatomia do corpo humano exige uma posição diferente na reali-zação do exame por raios X convencional. Já com a tomografia, o paciente permanece sempre na posição deitada. Devido aos inúmeros recursos que a Tomo-grafia Computadorizada disponibiliza para o exame de lesões e anomalias em estruturas e órgãos do cor-po humano, o console de comando de um tomógrafo é bem mais complexo quando comparado com o con-sole de aparelho radiográfico convencional.
Figura 3.1. Console de comando do equipamento
Toshiba. (cortesia Hosp. Celso Ramos - Florianópolis) Cada fabricante, ou mesmo séries diferentes
de equipamentos de um mesmo fabricante, tem a sua forma particular de disponibilizar para o técnico os diversos comandos e recursos necessários para a ope-ração do Tomógrafo. Com exceção de um ou outro recurso mais sofisticado, normalmente vendido sepa-radamente pelo fabricante, todo Tomógrafo Compu-tadorizado possui a mesma forma de operação e manipulação das imagens muito parecidas entre si. A seguir, veremos a descrição da Mesa de Operação e por conseqüência, dos recursos disponíveis nos to-mógrafos da marca Elscint, mais especificamente, o
Exel 2000 sprint e Twin Scan
(a)
(b)
Figura 3.3. O console de comando do Elscint re-sume-se a um teclado padrão de computador, mouse e tela do computador: a) Tela do compu-tador onde, através do mouse, são selecionadas as funções; b)console com botão de emergência e para comunicação com o paciente; ao fundo, comando da processadora laser. (cortesia Hospi-tal Mun. São José - Joinville)
20 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
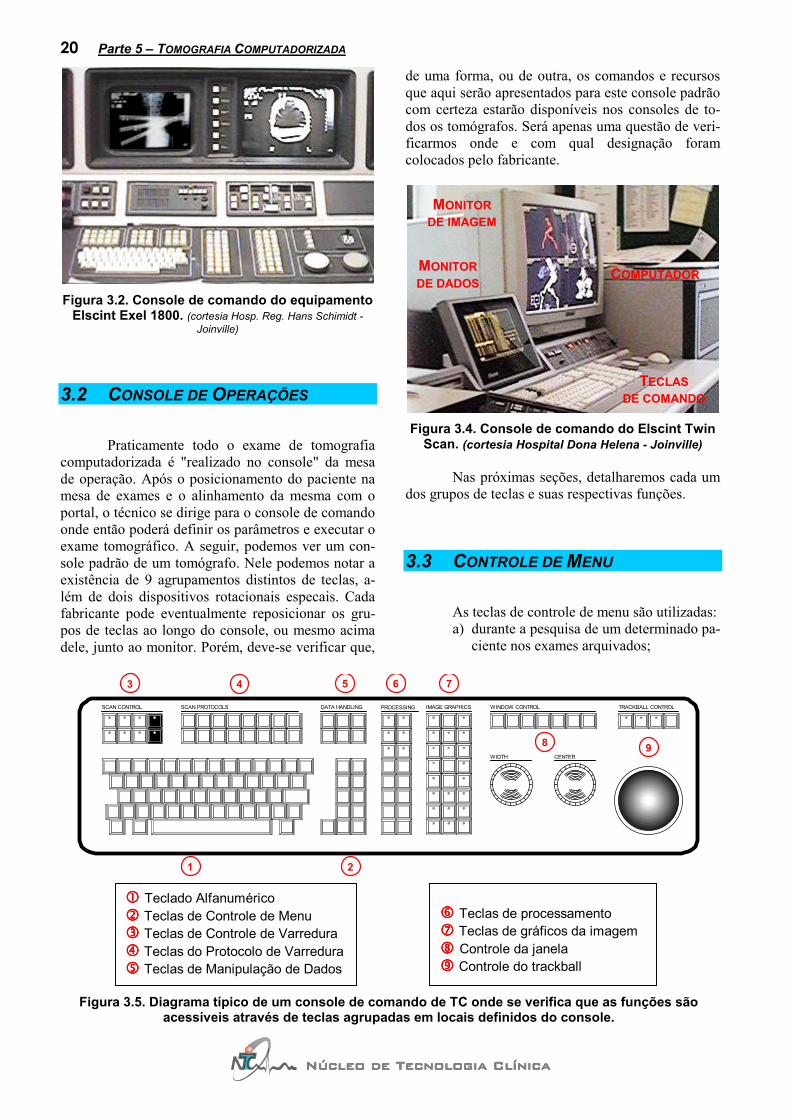
Figura 3.2. Console de comando do equipamento
Elscint Exel 1800. (cortesia Hosp. Reg. Hans Schimidt - Joinville)
3.2 CONSOLE DE OPERAÇÕES
Praticamente todo o exame de tomografia computadorizada é "realizado no console" da mesa de operação. Após o posicionamento do paciente na mesa de exames e o alinhamento da mesma com o portal, o técnico se dirige para o console de comando onde então poderá definir os parâmetros e executar o exame tomográfico. A seguir, podemos ver um con-sole padrão de um tomógrafo. Nele podemos notar a existência de 9 agrupamentos distintos de teclas, a-lém de dois dispositivos rotacionais especais. Cada fabricante pode eventualmente reposicionar os gru-pos de teclas ao longo do console, ou mesmo acima dele, junto ao monitor. Porém, deve-se verificar que,
de uma forma, ou de outra, os comandos e recursos que aqui serão apresentados para este console padrão com certeza estarão disponíveis nos consoles de to-dos os tomógrafos. Será apenas uma questão de veri-ficarmos onde e com qual designação foram colocados pelo fabricante.
Figura 3.4. Console de comando do Elscint Twin
Scan. (cortesia Hospital Dona Helena - Joinville) Nas próximas seções, detalharemos cada um
dos grupos de teclas e suas respectivas funções.
3.3 CONTROLE DE MENU
As teclas de controle de menu são utilizadas: a) durante a pesquisa de um determinado pa-
ciente nos exames arquivados;
WIDTH CENTER
WINDOW CONTROL IMAGE GRAPHICS PROCESSING DATA HANDLING SCAN CONTROL SCAN PROTOCOLS TRACKBALL CONTROL
8 9
7 6 5 4 3
1 2
Teclado Alfanumérico Teclas de Controle de Menu Teclas de Controle de Varredura Teclas do Protocolo de Varredura Teclas de Manipulação de Dados
Teclas de processamento Teclas de gráficos da imagem Controle da janela Controle do trackball
Figura 3.5. Diagrama típico de um console de comando de TC onde se verifica que as funções são
acessíveis através de teclas agrupadas em locais definidos do console.
MONITOR DE IMAGEM
MONITOR DE DADOS
TECLAS DE COMANDO
COMPUTADOR
OPERAÇÃO DO TOMÓGRAFO 21
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
b) na apresentação da lista de imagens de um determinado paciente;
c) na inserção ou verificação do protocolo de varredura;
d) para selecionar as imagens a serem exibi-das ou arquivadas;
e) mudanças no protocolo de varredura, etc.
HOMEPAGE
UP
ENDPAGEDOWN
*↓↓↓↓ →→→→
CONT ESC
←←←←
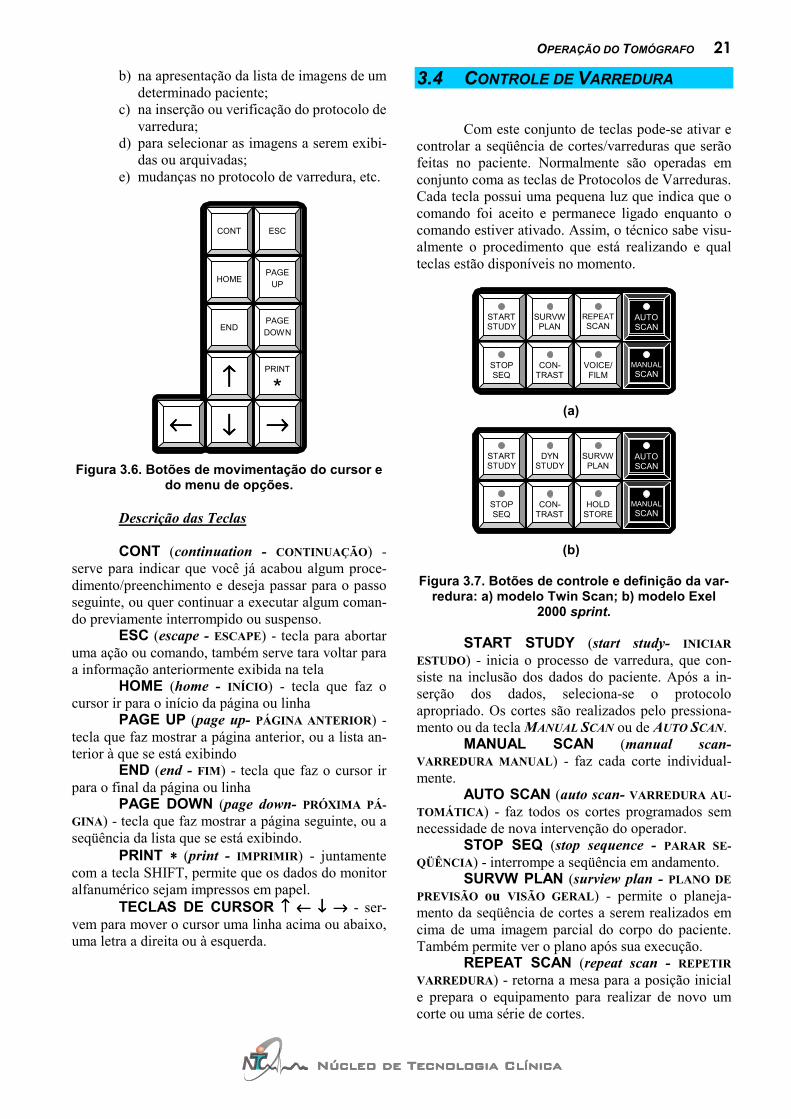
Figura 3.6. Botões de movimentação do cursor e do menu de opções.
Descrição das Teclas CONT (continuation - CONTINUAÇÃO) -
serve para indicar que você já acabou algum proce-dimento/preenchimento e deseja passar para o passo seguinte, ou quer continuar a executar algum coman-do previamente interrompido ou suspenso.
ESC (escape - ESCAPE) - tecla para abortar uma ação ou comando, também serve tara voltar para a informação anteriormente exibida na tela
HOME (home - INÍCIO) - tecla que faz o cursor ir para o início da página ou linha
PAGE UP (page up- PÁGINA ANTERIOR) - tecla que faz mostrar a página anterior, ou a lista an-terior à que se está exibindo
END (end - FIM) - tecla que faz o cursor ir para o final da página ou linha
PAGE DOWN (page down- PRÓXIMA PÁ-GINA) - tecla que faz mostrar a página seguinte, ou a seqüência da lista que se está exibindo.
PRINT ∗∗∗∗ (print - IMPRIMIR) - juntamente com a tecla SHIFT, permite que os dados do monitor alfanumérico sejam impressos em papel.
TECLAS DE CURSOR ↑↑↑↑ ←←←← ↓↓↓↓ →→→→ - ser-vem para mover o cursor uma linha acima ou abaixo, uma letra a direita ou à esquerda.
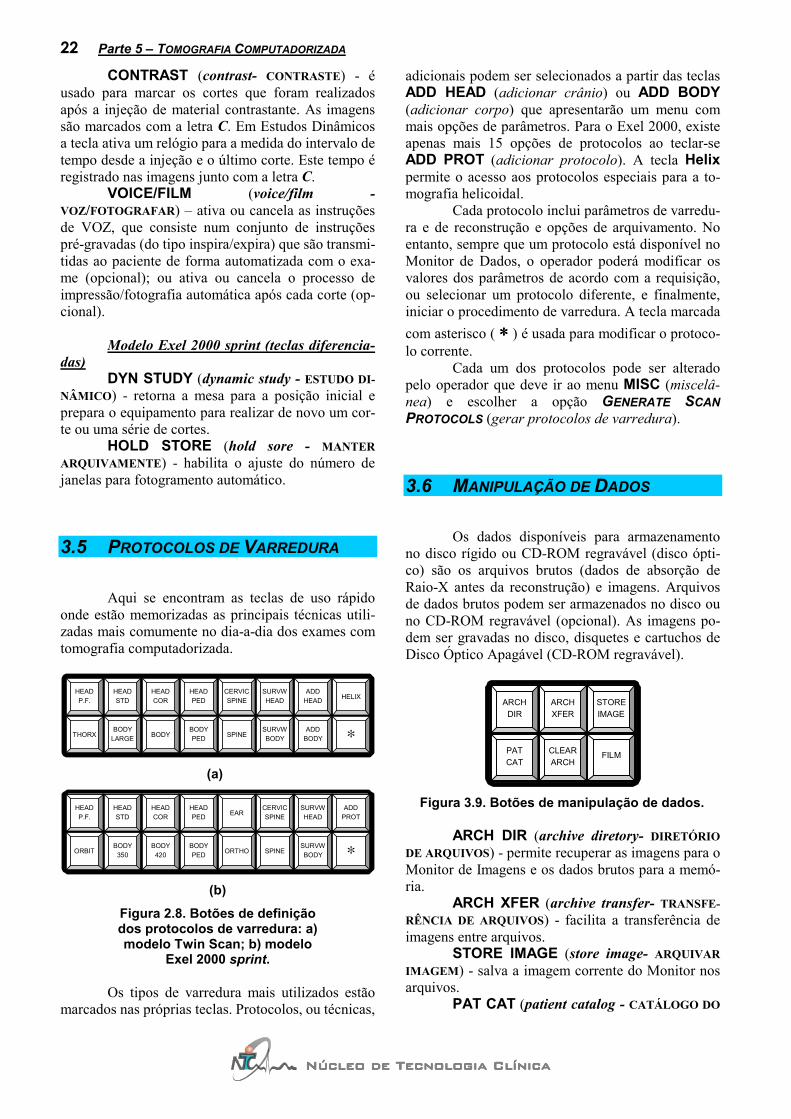
3.4 CONTROLE DE VARREDURA
Com este conjunto de teclas pode-se ativar e controlar a seqüência de cortes/varreduras que serão feitas no paciente. Normalmente são operadas em conjunto coma as teclas de Protocolos de Varreduras. Cada tecla possui uma pequena luz que indica que o comando foi aceito e permanece ligado enquanto o comando estiver ativado. Assim, o técnico sabe visu-almente o procedimento que está realizando e qual teclas estão disponíveis no momento.
CON-TRAST
STOPSEQ
VOICE/FILM
SURVWPLAN
STARTSTUDY
REPEATSCAN
MANUALSCAN
AUTOSCAN
(a)
CON-TRAST
STOPSEQ
HOLDSTORE
DYNSTUDY
STARTSTUDY
SURVWPLAN
MANUALSCAN
AUTOSCAN
(b)
Figura 3.7. Botões de controle e definição da var-redura: a) modelo Twin Scan; b) modelo Exel
2000 sprint. START STUDY (start study- INICIAR
ESTUDO) - inicia o processo de varredura, que con-siste na inclusão dos dados do paciente. Após a in-serção dos dados, seleciona-se o protocolo apropriado. Os cortes são realizados pelo pressiona-mento ou da tecla MANUAL SCAN ou de AUTO SCAN.
MANUAL SCAN (manual scan- VARREDURA MANUAL) - faz cada corte individual-mente.
AUTO SCAN (auto scan- VARREDURA AU-TOMÁTICA) - faz todos os cortes programados sem necessidade de nova intervenção do operador.
STOP SEQ (stop sequence - PARAR SE-QÜÊNCIA) - interrompe a seqüência em andamento.
SURVW PLAN (surview plan - PLANO DE PREVISÃO ou VISÃO GERAL) - permite o planeja-mento da seqüência de cortes a serem realizados em cima de uma imagem parcial do corpo do paciente. Também permite ver o plano após sua execução.
REPEAT SCAN (repeat scan - REPETIR VARREDURA) - retorna a mesa para a posição inicial e prepara o equipamento para realizar de novo um corte ou uma série de cortes.
22 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
CONTRAST (contrast- CONTRASTE) - é usado para marcar os cortes que foram realizados após a injeção de material contrastante. As imagens são marcados com a letra C. Em Estudos Dinâmicos a tecla ativa um relógio para a medida do intervalo de tempo desde a injeção e o último corte. Este tempo é registrado nas imagens junto com a letra C.
VOICE/FILM (voice/film - VOZ/FOTOGRAFAR) – ativa ou cancela as instruções de VOZ, que consiste num conjunto de instruções pré-gravadas (do tipo inspira/expira) que são transmi-tidas ao paciente de forma automatizada com o exa-me (opcional); ou ativa ou cancela o processo de impressão/fotografia automática após cada corte (op-cional).
Modelo Exel 2000 sprint (teclas diferencia-
das) DYN STUDY (dynamic study - ESTUDO DI-
NÂMICO) - retorna a mesa para a posição inicial e prepara o equipamento para realizar de novo um cor-te ou uma série de cortes.
HOLD STORE (hold sore - MANTER ARQUIVAMENTE) - habilita o ajuste do número de janelas para fotogramento automático.
3.5 PROTOCOLOS DE VARREDURA
Aqui se encontram as teclas de uso rápido onde estão memorizadas as principais técnicas utili-zadas mais comumente no dia-a-dia dos exames com tomografia computadorizada.
HEADP.F.
HEADSTD
HEADCOR
THORXBODY
LARGE BODY
HEADPED
CERVICSPINE
SURVWHEAD
BODYPED SPINE
SURVWBODY
ADDHEAD HELIX
ADDBODY ∗
(a)
HEADP.F.
HEADSTD
HEADCOR
ORBITBODY
350BODY
420
HEADPED EAR
CERVICSPINE
BODYPED ORTHO SPINE
SURVWHEAD
ADDPROT
SURVWBODY ∗
(b)
Figura 2.8. Botões de definição dos protocolos de varredura: a) modelo Twin Scan; b) modelo
Exel 2000 sprint. Os tipos de varredura mais utilizados estão
marcados nas próprias teclas. Protocolos, ou técnicas,
adicionais podem ser selecionados a partir das teclas ADD HEAD (adicionar crânio) ou ADD BODY (adicionar corpo) que apresentarão um menu com mais opções de parâmetros. Para o Exel 2000, existe apenas mais 15 opções de protocolos ao teclar-se ADD PROT (adicionar protocolo). A tecla Helix permite o acesso aos protocolos especiais para a to-mografia helicoidal.
Cada protocolo inclui parâmetros de varredu-ra e de reconstrução e opções de arquivamento. No entanto, sempre que um protocolo está disponível no Monitor de Dados, o operador poderá modificar os valores dos parâmetros de acordo com a requisição, ou selecionar um protocolo diferente, e finalmente, iniciar o procedimento de varredura. A tecla marcada com asterisco ( ∗∗∗∗ ) é usada para modificar o protoco-lo corrente.
Cada um dos protocolos pode ser alterado pelo operador que deve ir ao menu MISC (miscelâ-nea) e escolher a opção GENERATE SCAN PROTOCOLS (gerar protocolos de varredura).
3.6 MANIPULAÇÃO DE DADOS
Os dados disponíveis para armazenamento no disco rígido ou CD-ROM regravável (disco ópti-co) são os arquivos brutos (dados de absorção de Raio-X antes da reconstrução) e imagens. Arquivos de dados brutos podem ser armazenados no disco ou no CD-ROM regravável (opcional). As imagens po-dem ser gravadas no disco, disquetes e cartuchos de Disco Óptico Apagável (CD-ROM regravável).
ARCHDIR
ARCHXFER
STOREIMAGE
PATCAT
CLEARARCH
FILM
Figura 3.9. Botões de manipulação de dados.
ARCH DIR (archive diretory- DIRETÓRIO
DE ARQUIVOS) - permite recuperar as imagens para o Monitor de Imagens e os dados brutos para a memó-ria.
ARCH XFER (archive transfer- TRANSFE-RÊNCIA DE ARQUIVOS) - facilita a transferência de imagens entre arquivos.
STORE IMAGE (store image- ARQUIVAR IMAGEM) - salva a imagem corrente do Monitor nos arquivos.
PAT CAT (patient catalog - CATÁLOGO DO
OPERAÇÃO DO TOMÓGRAFO 23
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
PACIENTE) - permite a visualização e eliminação das informações do paciente que estão armazenadas em disco. Também permite que as informações do paci-ente sejam guardadas ou recuperadas dos disquetes.
CLEAR ARCH (clear archive- LIMPAR ARQUIVO) - permite a eliminação de cortes específi-cos de arquivos, apagamento completo de arquivos e a formatação de disquetes.
FILM (film - FOTOGRAFAR) - permite foto-grafar a imagem apresentada ou um conjunto de ima-gens dos arquivos.
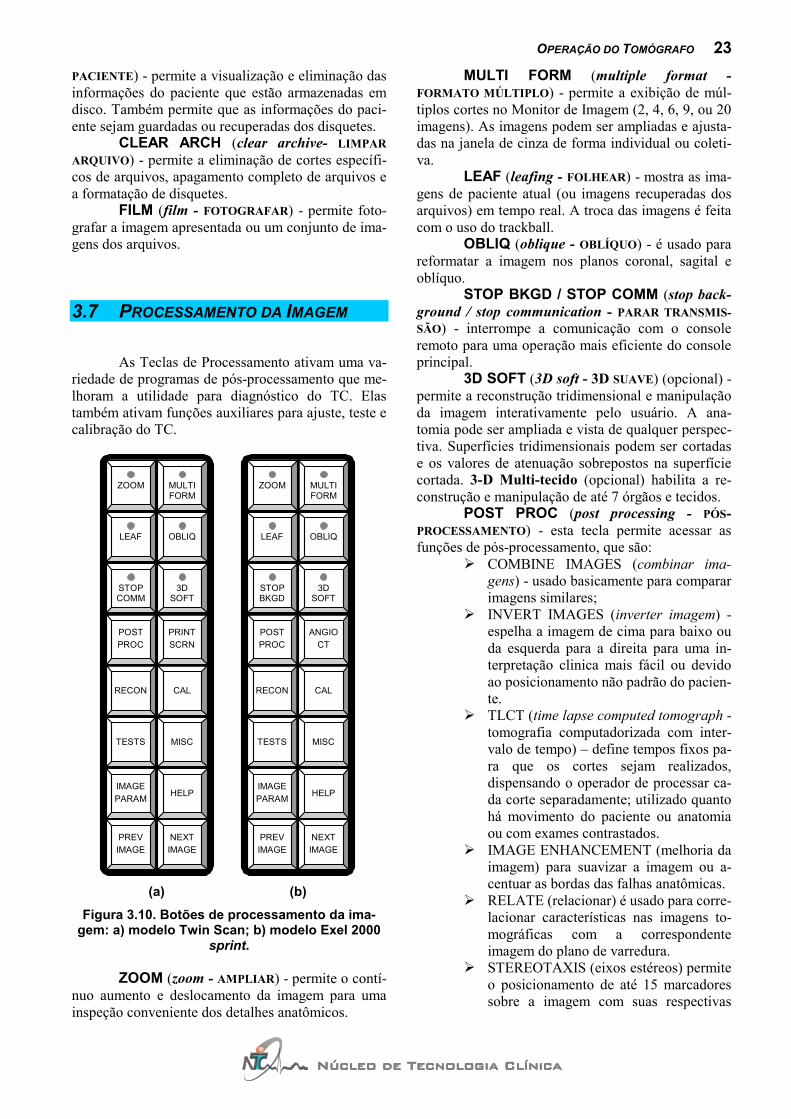
3.7 PROCESSAMENTO DA IMAGEM
As Teclas de Processamento ativam uma va-riedade de programas de pós-processamento que me-lhoram a utilidade para diagnóstico do TC. Elas também ativam funções auxiliares para ajuste, teste e calibração do TC.
RECON CAL
TESTS MISC
IMAGEPARAM HELP
PREVIMAGE
NEXTIMAGE
MULTIFORM
OBLIQ
ZOOM
LEAF
POSTPROC
PRINTSCRN
STOPCOMM
3DSOFT
RECON CAL
TESTS MISC
IMAGEPARAM HELP
PREVIMAGE
NEXTIMAGE
MULTIFORM
OBLIQ
ZOOM
LEAF
POSTPROC
ANGIOCT
STOPBKGD
3DSOFT
(a) (b)
Figura 3.10. Botões de processamento da ima-gem: a) modelo Twin Scan; b) modelo Exel 2000
sprint. ZOOM (zoom - AMPLIAR) - permite o contí-
nuo aumento e deslocamento da imagem para uma inspeção conveniente dos detalhes anatômicos.
MULTI FORM (multiple format - FORMATO MÚLTIPLO) - permite a exibição de múl-tiplos cortes no Monitor de Imagem (2, 4, 6, 9, ou 20 imagens). As imagens podem ser ampliadas e ajusta-das na janela de cinza de forma individual ou coleti-va.
LEAF (leafing - FOLHEAR) - mostra as ima-gens de paciente atual (ou imagens recuperadas dos arquivos) em tempo real. A troca das imagens é feita com o uso do trackball.
OBLIQ (oblique - OBLÍQUO) - é usado para reformatar a imagem nos planos coronal, sagital e oblíquo.
STOP BKGD / STOP COMM (stop back-ground / stop communication - PARAR TRANSMIS-SÃO) - interrompe a comunicação com o console remoto para uma operação mais eficiente do console principal.
3D SOFT (3D soft - 3D SUAVE) (opcional) - permite a reconstrução tridimensional e manipulação da imagem interativamente pelo usuário. A ana-tomia pode ser ampliada e vista de qualquer perspec-tiva. Superfícies tridimensionais podem ser cortadas e os valores de atenuação sobrepostos na superfície cortada. 3-D Multi-tecido (opcional) habilita a re-construção e manipulação de até 7 órgãos e tecidos.
POST PROC (post processing - PÓS-PROCESSAMENTO) - esta tecla permite acessar as funções de pós-processamento, que são:
COMBINE IMAGES (combinar ima-gens) - usado basicamente para comparar imagens similares; INVERT IMAGES (inverter imagem) - espelha a imagem de cima para baixo ou da esquerda para a direita para uma in-terpretação clinica mais fácil ou devido ao posicionamento não padrão do pacien-te. TLCT (time lapse computed tomograph - tomografia computadorizada com inter-valo de tempo) – define tempos fixos pa-ra que os cortes sejam realizados, dispensando o operador de processar ca-da corte separadamente; utilizado quanto há movimento do paciente ou anatomia ou com exames contrastados. IMAGE ENHANCEMENT (melhoria da imagem) para suavizar a imagem ou a-centuar as bordas das falhas anatômicas. RELATE (relacionar) é usado para corre-lacionar características nas imagens to-mográficas com a correspondente imagem do plano de varredura. STEREOTAXIS (eixos estéreos) permite o posicionamento de até 15 marcadores sobre a imagem com suas respectivas
24 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
coordenadas para facilitar o planejamen-to de cirurgias esterotácicas. BMA (bone mineral content - conteúdo mineral do osso) ajuda no cálculo do conteúdo mineral do osso na coluna lombar após um exame BMA (opcional). DENTACT (opcional) auxilia na produ-ção de imagens para uso no planejamen-to de implantação de próteses dentárias. PRINT ROI CONTENTS (imprimir con-teúdos de áreas de interesse) envia para um impressora (opcional) os valores de atenuação da área de interesse definido pelo usuário.
RECON (reconstruction - RECONSTRU-
ÇÃO) - reconstrói arquivos brutos com deslocamento X e Y definidos pelo usuário, além de fatores de am-pliação, matriz e filtro.
CAL (calibration- CALIBRAÇÃO) - é usado para a calibração diária do sistema.
TESTS (tests - TESTES) - chama os progra-mas de serviço para avaliar o desempenho do tomó-grafo. Só pode ser usado por pessoal qualificado da Elscint.
MISC (miscellaneous - MISCELÂNEA) - chama um menu com várias opções de ajustes.
IMAGE PARAM (image parameters- PA-RÂMETROS DA IMAGEM) - mostra os parâmetros da imagem incluindo detalhes do paciente, fatores da técnica e parâmetros de reconstrução no Monitor de Imagem.
HELP (help- AJUDA) - providencia instru-ções para operação da função atualmente em uso.
PREV IMAGE (previous image- IMAGEM ANTERIOR) - tecla usada para ver a imagem anterior.
NEXT IMAGE (next image- PRÓXIMA IMAGEM) - tecla usada para ver a imagem seguinte.
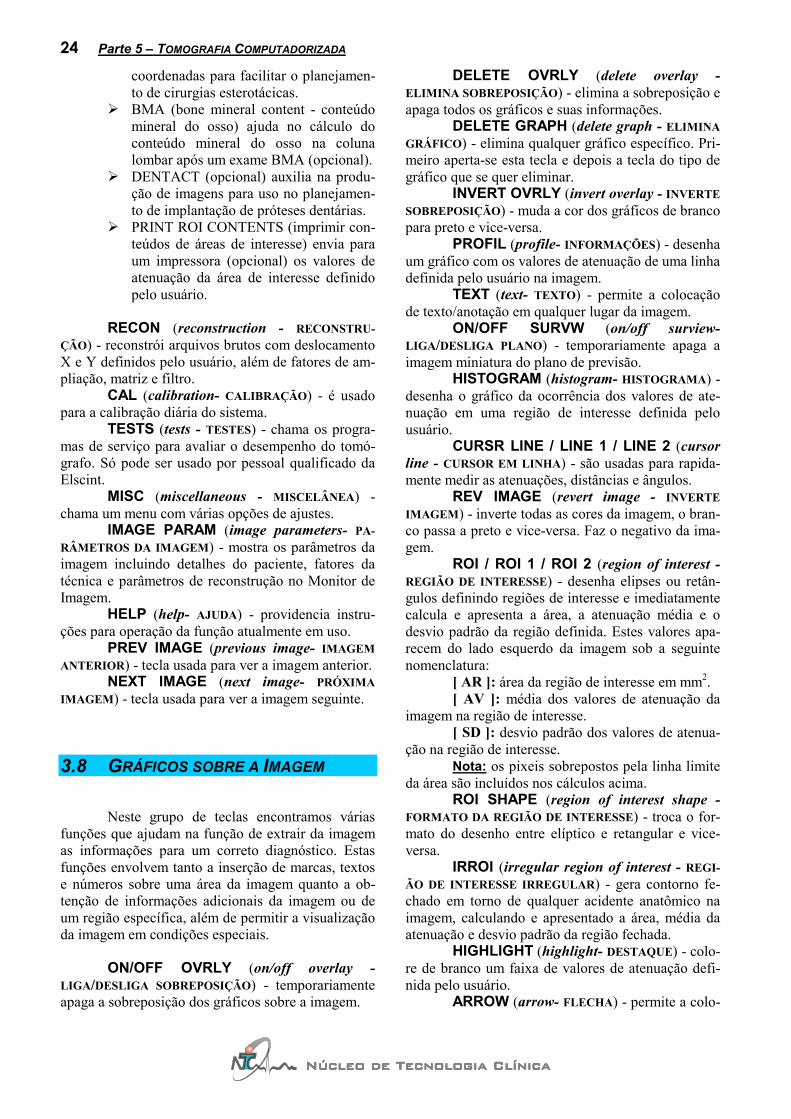
3.8 GRÁFICOS SOBRE A IMAGEM
Neste grupo de teclas encontramos várias funções que ajudam na função de extrair da imagem as informações para um correto diagnóstico. Estas funções envolvem tanto a inserção de marcas, textos e números sobre uma área da imagem quanto a ob-tenção de informações adicionais da imagem ou de um região específica, além de permitir a visualização da imagem em condições especiais.
ON/OFF OVRLY (on/off overlay -
LIGA/DESLIGA SOBREPOSIÇÃO) - temporariamente apaga a sobreposição dos gráficos sobre a imagem.
DELETE OVRLY (delete overlay - ELIMINA SOBREPOSIÇÃO) - elimina a sobreposição e apaga todos os gráficos e suas informações.
DELETE GRAPH (delete graph - ELIMINA GRÁFICO) - elimina qualquer gráfico específico. Pri-meiro aperta-se esta tecla e depois a tecla do tipo de gráfico que se quer eliminar.
INVERT OVRLY (invert overlay - INVERTE SOBREPOSIÇÃO) - muda a cor dos gráficos de branco para preto e vice-versa.
PROFIL (profile- INFORMAÇÕES) - desenha um gráfico com os valores de atenuação de uma linha definida pelo usuário na imagem.
TEXT (text- TEXTO) - permite a colocação de texto/anotação em qualquer lugar da imagem.
ON/OFF SURVW (on/off surview- LIGA/DESLIGA PLANO) - temporariamente apaga a imagem miniatura do plano de previsão.
HISTOGRAM (histogram- HISTOGRAMA) - desenha o gráfico da ocorrência dos valores de ate-nuação em uma região de interesse definida pelo usuário.
CURSR LINE / LINE 1 / LINE 2 (cursor line - CURSOR EM LINHA) - são usadas para rapida-mente medir as atenuações, distâncias e ângulos.
REV IMAGE (revert image - INVERTE IMAGEM) - inverte todas as cores da imagem, o bran-co passa a preto e vice-versa. Faz o negativo da ima-gem.
ROI / ROI 1 / ROI 2 (region of interest - REGIÃO DE INTERESSE) - desenha elipses ou retân-gulos definindo regiões de interesse e imediatamente calcula e apresenta a área, a atenuação média e o desvio padrão da região definida. Estes valores apa-recem do lado esquerdo da imagem sob a seguinte nomenclatura:
[ AR ]: área da região de interesse em mm2. [ AV ]: média dos valores de atenuação da
imagem na região de interesse. [ SD ]: desvio padrão dos valores de atenua-
ção na região de interesse. Nota: os pixeis sobrepostos pela linha limite
da área são incluídos nos cálculos acima. ROI SHAPE (region of interest shape -
FORMATO DA REGIÃO DE INTERESSE) - troca o for-mato do desenho entre elíptico e retangular e vice-versa.
IRROI (irregular region of interest - REGI-ÃO DE INTERESSE IRREGULAR) - gera contorno fe-chado em torno de qualquer acidente anatômico na imagem, calculando e apresentado a área, média da atenuação e desvio padrão da região fechada.
HIGHLIGHT (highlight- DESTAQUE) - colo-re de branco um faixa de valores de atenuação defi-nida pelo usuário.
ARROW (arrow- FLECHA) - permite a colo-
OPERAÇÃO DO TOMÓGRAFO 25
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
cação de até 9 setas na imagem para assessorar na identificação de características anatômicas.
ANGLE (angle- ÂNGULO) – permite medir o ângulo entre duas retas.
DUAL WINDW (dual window- JANELA DUPLA) - simultaneamente apresenta duas faixas in-dependentes de valores de atenuação na mesma ima-gem, tal como a janela de pulmão e de mediastino.
PART WINDW (partial window - JANELA PARCIAL) - permite que as janelas sejam ajustadas separadamente para cada imagem numa apresentação multi-formato.
KEEP WINDW (keep window - MANTER JANELA) - permite recuperar uma imagem do arquivo e exibi-la com os padrões de janela atuais, e não com os valore salvos.
SCALE (scale- ESCALA) - desenha escalas graduadas de qualquer forma, segundo os parâmetros do usuário, que podem ser colocadas em qualquer lugar da imagem para medir distância ou escalamen-to.
DELETEOVRLY
ON/OFFOVRLY
ROISHAPE
PROFILINVERTOVRLY
ON/OFFSURVW
HISTOGRAM
DELETEGRAPH
TEXT
CURSRLINE
ROIREVIMAGE
HIGHLIGHT
DUALWINDW
SCALE
GRIDPARTWINDW
KEEPWINDW
SCRNORG
ARROW
ANGLE
IRROI
ACTIVGRAPH
DELETEOVRLY
ON/OFFOVRLY
PROFILINVERTOVRLY
ON/OFFSURVW
HISTOGRAM
DELETEGRAPH
TEXT
CURSRLINE 1
CURSRLINE 2
REVIMAGE
ROISHAPEHIGH
LIGHT
DUALWINDW
GRIDPARTWINDW
KEEPWINDW
SCALE
ROI 1
ROI 2
IRROI
ARROW
(a) (b)
Figura 2.11. Botões de inserção de gráficos: a) modelo Twin Scan; b) modelo Exel 2000 sprint.
GRID (grid - GRADE) - exibe um gra-
de/quadriculado preto sobre branco para facilitar as medições do filme, ou superpõe na imagem uma gra-de branca. O espaçamento é definido pelo operador.
SCRN ORG (screen organization - ORGA-NIZAÇÃO DA TELA) -.
ACTIV GRAPH (active graphic - ATIVA GRÁFICO) -.
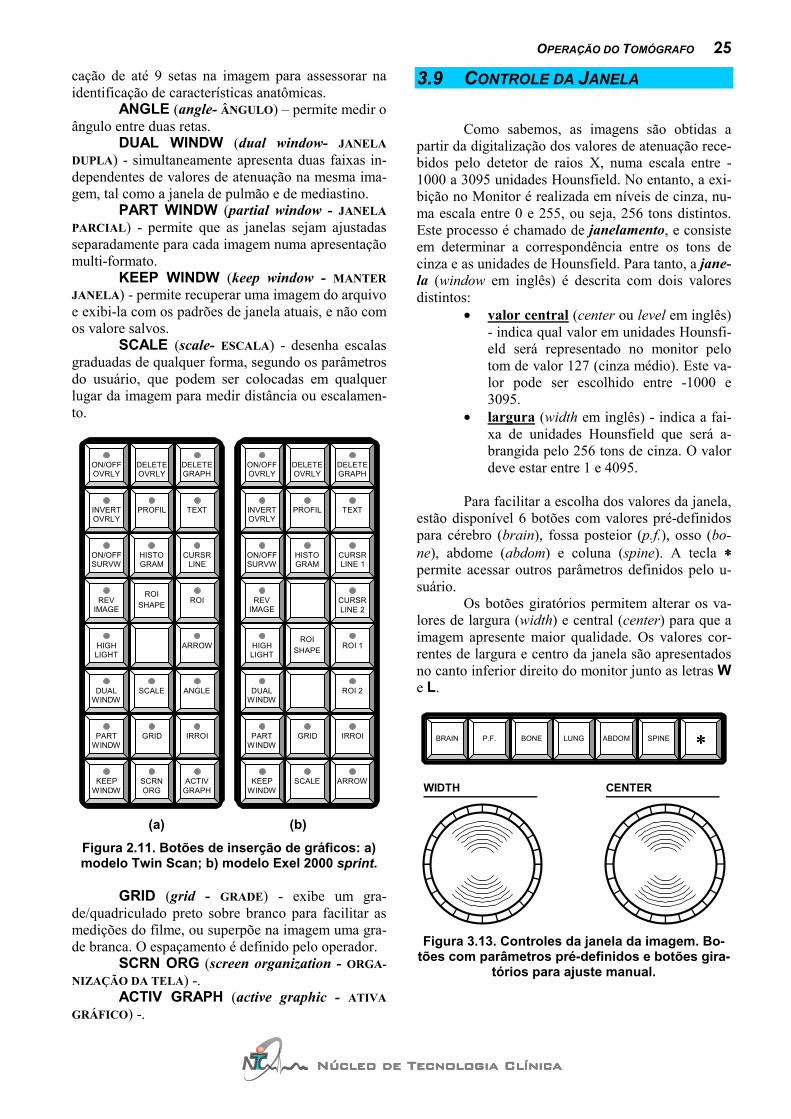
3.9 CONTROLE DA JANELA
Como sabemos, as imagens são obtidas a partir da digitalização dos valores de atenuação rece-bidos pelo detetor de raios X, numa escala entre -1000 a 3095 unidades Hounsfield. No entanto, a exi-bição no Monitor é realizada em níveis de cinza, nu-ma escala entre 0 e 255, ou seja, 256 tons distintos. Este processo é chamado de janelamento, e consiste em determinar a correspondência entre os tons de cinza e as unidades de Hounsfield. Para tanto, a jane-la (window em inglês) é descrita com dois valores distintos:
• valor central (center ou level em inglês) - indica qual valor em unidades Hounsfi-eld será representado no monitor pelo tom de valor 127 (cinza médio). Este va-lor pode ser escolhido entre -1000 e 3095.
• largura (width em inglês) - indica a fai-xa de unidades Hounsfield que será a-brangida pelo 256 tons de cinza. O valor deve estar entre 1 e 4095.
Para facilitar a escolha dos valores da janela,
estão disponível 6 botões com valores pré-definidos para cérebro (brain), fossa posteior (p.f.), osso (bo-ne), abdome (abdom) e coluna (spine). A tecla ∗∗∗∗ permite acessar outros parâmetros definidos pelo u-suário.
Os botões giratórios permitem alterar os va-lores de largura (width) e central (center) para que a imagem apresente maior qualidade. Os valores cor-rentes de largura e centro da janela são apresentados no canto inferior direito do monitor junto as letras W e L.
BRAIN P.F. BONE LUNG ABDOM SPINE ∗∗∗∗
WIDTH CENTER
Figura 3.13. Controles da janela da imagem. Bo-
tões com parâmetros pré-definidos e botões gira-tórios para ajuste manual.
26 Parte 5 – TOMOGRAFIA COMPUTADORIZADA
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
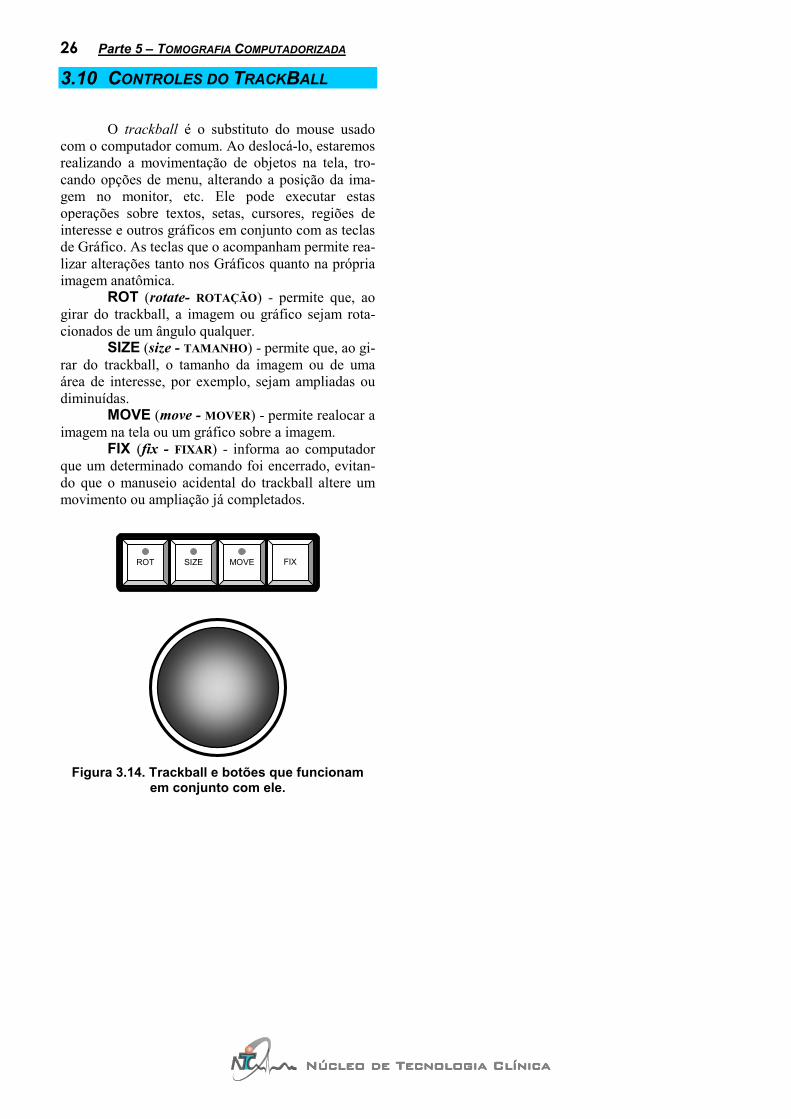
3.10 CONTROLES DO TRACKBALL
O trackball é o substituto do mouse usado com o computador comum. Ao deslocá-lo, estaremos realizando a movimentação de objetos na tela, tro-cando opções de menu, alterando a posição da ima-gem no monitor, etc. Ele pode executar estas operações sobre textos, setas, cursores, regiões de interesse e outros gráficos em conjunto com as teclas de Gráfico. As teclas que o acompanham permite rea-lizar alterações tanto nos Gráficos quanto na própria imagem anatômica.
ROT (rotate- ROTAÇÃO) - permite que, ao girar do trackball, a imagem ou gráfico sejam rota-cionados de um ângulo qualquer.
SIZE (size - TAMANHO) - permite que, ao gi-rar do trackball, o tamanho da imagem ou de uma área de interesse, por exemplo, sejam ampliadas ou diminuídas.
MOVE (move - MOVER) - permite realocar a imagem na tela ou um gráfico sobre a imagem.
FIX (fix - FIXAR) - informa ao computador que um determinado comando foi encerrado, evitan-do que o manuseio acidental do trackball altere um movimento ou ampliação já completados.
FIX
SIZE
ROT
MOVE
Figura 3.14. Trackball e botões que funcionam
em conjunto com ele.
Núcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia ClínicaNúcleo de Tecnologia Clínica
4. BIBLIOGRAFIA
BUSHONG, Stewart C. Radiologic science for technologists: physics, biology, and protection. 6 ed. Mosby-Year Book, Inc. St. Louis 1997, 600 pp.
EISENBERG, Ronald L. Radiology: an illustrated history. Mosby-Year Book, Inc. St. Louis 1992, 606 pp.
HOXTER, Erwin A. Introdução a técnica radiográfica. Siemens AG - Editora Edgard Blücher Ltda. São Paulo 1977, 223 pp.
KODAK. Fundamentos de Radiografia. Eastman Kodak Company, Estados Unidos 1980, 128 pp. Manuais de Fabricantes: Philips, General Electric e Siemens.