
INSTITUTO POLITÉCNICO NACIONALtesis.ipn.mx/jspui/bitstream/123456789/13925/1/2013 2014(1).pdf ·...
79
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD PROFESIONAL TICOMÁN SEMINARIO DE ACTUALIZACIÓN CON OPCIÓN A TITULACIÓN SISTEMAS DE AVIÓNICA “DISEÑO CONCEPTUAL DE UN SISTEMA DE SEGUIMIENTO DE OBJETIVO CONTROLADO POR MOVIMIENTO DE CABEZA DEL PILOTO” Tesina que presenta MOLOTLA JIMÉNEZ JOSÉ RODRIGO Para obtener el título de INGENIERO EN AERONÁUTICA MEXICO D.F JUNIO 2014
Transcript of INSTITUTO POLITÉCNICO NACIONALtesis.ipn.mx/jspui/bitstream/123456789/13925/1/2013 2014(1).pdf ·...

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y
ELÉCTRICA
UNIDAD PROFESIONAL TICOMÁN
SEMINARIO DE ACTUALIZACIÓN CON OPCIÓN A
TITULACIÓN
SISTEMAS DE AVIÓNICA
“DISEÑO CONCEPTUAL DE UN SISTEMA DE
SEGUIMIENTO DE OBJETIVO CONTROLADO POR
MOVIMIENTO DE CABEZA DEL PILOTO”
Tesina que presenta
MOLOTLA JIMÉNEZ JOSÉ RODRIGO
Para obtener el título de
INGENIERO EN AERONÁUTICA
MEXICO D.F JUNIO 2014

iii
ÍNDICE
Índice…………………………………………………………………………………….. iii
Lista de figuras………………………………………………………………………….. v
Lista de tablas……………………………………………………………………….......v
Lista de acrónimos…………………………………………………………………....... vi
Agradecimientos………………………………………………………………………... vii
Resumen………………………………………………………………………………… viii
Abstract……………………………………………………………………………......... viii
Objetivos …………………………………………………………………………….......ix
Estado del arte………………………………………………………………………….. x
Justificación……………………………………………………………………….......... xi
CAPÍTULO 1. EVOLUCION DE LOS SISTEMAS DE ARMAMENTO EN LAS AERONAVES…………………………………………………………………………… 1
1.1 Armamento en las aeronaves…………………………………………….. 2 1.1.1 Conceptos…………………………………………………….…. 2 1.1.2 Evolución del armamento en las aeronaves…………….…… 4 1.1.3 Cañones y torretas en Helicópteros………………….………. 7
1.2 Tecnología actual de adquisición y seguimiento de objetivos…….….. 9 1.2.1 HMD………………………………………………………….….... 10 1.2.2 Seguimiento del movimiento de cabeza…………………….… 11 CAPÍTULO 2. COMPONENTES Y CARACTERÍTICAS DEL SISTEMA DE SEGUIMIENTO DE OBJETIVO………………………………………………………. 12
2.1 Sensores ……………………………………………………………………. 13
2.1.1 Giroscopios…………………………………………………….…. 15 2.1.1.1 Giroscopio de anillo laser………………………….….. 15 2.1.1.2 Giroscopio MEMS……………………………………… 17
2.1.2 Acelerómetros…………………………………………………..... 19
2.1.2.1 Acelerómetros mecánicos…………………………….. 20 2.1.2.2 Acelerómetros capacitivos……………………………. 21 3.1.2.3 Acelerómetros piezoeléctricos……………………...... 22 2.1.2.4 Acelerómetros térmicos………………………..……… 24

iv
2.1.2.4 Acelerómetros micro mecánicos (“MEMS”)……........ 24 2.2 Unidad de control…………………………….…………………………… 26
2.2.1 Micro controladores……………………………………………… 26 2.2.2 Convertidor analógico digital…………………………………….28
2.2.2.1 Tipos de convertidores AD……………………………. 29 2.3 Actuadores……………………………………………….…………………. 31
2.3.1 Motores paso a paso……………………………………………. 32 2.3.2 Servomotores…………………………………………………….. 34 2.3.2.1 PWM…………………………………………………….. 36 2.3.3 Comparación entre motores paso a paso y servomotores….. 38 CAPITULO 3. DESCRIPCIÓN OPERATIVA DEL DISEÑO……………………….. 40
3.1 Detección de movimiento…………………………………………………. 41 3.1.1Sistema de detección de movimiento de cabeceo…………..... 41 3.1.2 Sistema de detección de movimiento de guiñada…………..... 42 3.2 Adquisición de datos, procesamiento y control de actuadores……….. 43 CAPÍTULO 4 PROGRAMACIÓN……………………………………………………... 44
4.1 Eje de Altitud, movimiento de Cabeceo…………………………………. 45 4.1.1 Determinación de posición……………………………………… 45 4.1.2 Control del servomotor………………………………………….. 47
4.2 Eje Azimut movimiento de guiñada………………………………………. 49 4.1.1 Determinación de posición y control del servomotor.......……. 49 CAPÍTULO 5 SIMULACIÓN…………………………………………………………... 51
5.1 Simulación del sistema de seguimiento del movimiento de cabeceo… 52 5.1.1 Condición inicial inclinación de 0°……………………………… 54 5.1.2 Condición pitch 90°………………………………………………. 56 5.1.3 Condición pitch 45°…………………….………………………… 57 5.1.4 Condición pitch -45°……………………………………………… 59 5.1.5 Condición pitch -90°……………………………………………… 60 5.2 Simulación del sistema de seguimiento del movimiento de guiñada………… 62 5.2.1 simulación programada………………………………………….. 63 CONCLUSIONES………………………………………………………………………. 67 REFERENCIAS…………………………………………………………………………. 68
BIBLIOGRAFÍA…………………………………………………………………………. 68

v
Lista de Tablas.
Tabla 1 Duración de pulso, frecuencia y cableado de diferentes fabricantes...... 38 Tabla 2 Componentes de la gravedad para diferentes ángulos de pitch………... 42 Tabla 3 Voltaje a la salida del acelerómetro para diferentes inclinaciones……… 53 Tabla 4. Voltaje para diferentes velocidades angulares…………………………… 64
Lista de figuras. Fig.1.1 Convertiplano Bell-Boeing V-22 Osprey……………………………….…… 3 Fig.1.2. Ascenso en globo durante la guerra civil estadounidense …………….. 4 Fig.1.3. Diseño experimental de Voisin……………………………………………… 5 Fig.1.4 Ejes de movimiento Altazimutal.…………………………………………..… 6 Fig.1.5 Bell UH1- Iroquois………………………………………………………...…… 7 Fig.1.7 Torreta y sistemas detección de objetivo…………………………………… 8 Fig.1.8 Imagen HMD monocromático de un helicóptero Apache…..…………….. 9 Fig.2.1 Dibujo de un giróscopo…………………………………………………..…… 15 Fig.2.2 Esquema del funcionamiento de un giroscopio laser……………………… 16 Fig.2.3 Efecto Coriolis……………………………………………………………..…… 17 Fig.2.4 Esquema de giroscopio MEMS cuando se aplica una velocidad angular…………………………………………………………………………………… 18 Fig.2.5 Comparación del tamaño de los giróscopos MEMS en los últimos años 18 Fig.2.6 Sistema masa resorte amortiguado……………………………………….… 19 Fig.2.7 Esquema de un acelerómetro mecánico de galgas extensiométricas 20 Fig.2.8 Acelerómetro en reposo y siendo afectado por una aceleración…..…… 21 Fig.2.9 Pacas paralelas, y arreglo "interdigital"…………………………………..… 22 Fig.10 Arreglos de capacitores diferenciales, y modelo del circuito……………… 22 Fig.2.11 Esquema de un acelerómetro piezoeléctrico…………………………….. 23 Fig.2.12 Esquema de un acelerómetro térmico y distribución de la temperatura. 24 Fig.2.12 Comparación de las dimensiones de acelerómetros MEMS…………… 25 Fig.2.13 Esquema del interior del encapsulado de un dispositivo MEMS……..… 25 Fig.2.14 Esquema de motores paso a paso de imán permanente, unipolar y bipolar…………………………………………………………………………………… 34 Fig.2.15 Diagrama a bloques típico de un servomotor…………………………….. 35 Fig.2.16 Generación de señal PWM mediante intersección de señales……...…. 36 Fig.2.17 Correlación entre la duración del pulso y la posición del servomotor 37 Fig.3.1 Ejemplo de la forma más sencilla de integración numérica…………….… 43 Fig.5.1 Circuito equivalente para medición de cabeceo…………………………… 52 Fig.5.2 Resultados simulación cálculo de posición……………………………..….. 54 Fig.5.3 Señal PWM para pitch 0°……………………………………………...……… 55 Fig.5.4 ancho de pulso para pitch 0°………………………………………………… 55 Fig.5.5 Posición del servo para pitch 0°…………………………………………...… 55 Fig.5.6 Resultados simulación cálculo de posición pitch 90°…………………..…. 56 Fig.5.7 Señal PWM para pitch 90°…………………………………………………… 56 Fig.5.8 ancho de pulso para pitch 90°……………………………………….……… 57 Fig.5.9 Posición del servo para pitch 90°……………………………………………. 57 Fig.5.10 Resultados simulación cálculo de posición pitch 45°……………………. 58
vi
Fig.5.11 Señal PWM para pitch 45°………………………………………….……… 58 Fig.5.12 ancho de pulso para pitch 45°…………………………………………….. 58 Fig.5.13 Posición del servo para pitch 45°………………………………………...... 59 Fig.5.14 Resultados simulación cálculo de posición pitch -45°…………………… 59 Fig.5.15 Señal PWM para pitch -45°………………………………………………… 60 Fig.5.16 ancho de pulso para pitch -45°……………………………………………. 60 Fig.5.17 Posición del servo para pitch -45°……………………….......................... 60 Fig.5.18 Resultados simulación cálculo de posición pitch -90°…………………… 61 Fig.5.19 Señal PWM para pitch -90°……………………………………………....... 61 Fig.5.20 ancho de pulso para pitch -90°……………………………………………. 62 Fig.5.21 Posición del servo para pitch -90°…………………………………………. 62 Fig.5.22 Circuito equivalente para la simulación del movimiento en Azimut…..… 63 Fig.5.23 Señal programada para simular el movimiento de cabeza……………… 63 Fig.5.24 Respuesta al voltaje inicial de 1.5 v………………………………..……… 64 Fig.5.24 Respuesta del servomotor a impulso 1.6 Volts durante 1 segundo 65 Fig.5.25 Respuesta de ancho de pulso y posición del servo para un desplazamiento hasta 0°…………………………………………………………….… 65 Figura 5.26 Ancho de pulso para posición 180° ……………………………………. 66
Lista de acrónimos. MEMS Micro Electro Mechanical Systems (Sistemas Microelectromecánicos)
HMD Head/Helmet Display (Display montado en casco/cabeza)
TADS Target Acquisition and Designtation Sight.
OACI Organización de Aviación Civil Internacional
VTOL Vertical Take Off and Landing GPS Globa Positioning System CPU Central Proccess Unit ROM Read Only Memory EEPROM Elcectronically Erasable Programable ROM RAM Random Acces Memory CAD Convertidor Analógico Digital PWM Pulse-Width Modulation (Modulación por ancho de pulsos) DSP Procesado Digital del Señales RPM Revoluciones Por Minuto MEA More Electric Aircraft(Aeronave Más Eléctrica) PAP Motor Paso a Paso DPS Degrees per Second, Grados por Segundo. LCD Liquid Crystal Display (Display de cristal Líquido) PIC Peripheral Interface Controller (controlador de interfaz periférico).
vii
AGRADECIMIENTOS
A aquellos que dedicaron su vida a promover una educación laica, gratuita y de
calidad.
A aquellos que fundaron el Instituto Politécnico Nacional, abriendo un camino que
puede recorrer todo individuo que aspire a una formación profesional, sin importar
el estrato social del que provenga.
Al pueblo de México, que hace posible la manutención del sistema de educación
pública.
A mis padres José Luis Molotla, y Leticia Jiménez.
A mis hermanos Carlos e Isaac y mi sobrina Sofía.
A mis abuelas, Emma y Enriqueta,
A toda mi gran familia.
A mi asesor Ing. Rodrigo Avilés.
A los valientes.

viii
RESUMEN
Este trabajo se llevó a cabo con el único objetivo de elaborar un diseño
conceptual que permita implementar la tecnología de micro controladores
programables y sensores micro mecánicos a un sistema de seguimiento de
objetivo, que puede ser controlado por movimiento de cabeza del piloto
Documenta brevemente la evolución de los sistemas de armamento a bordo de las
aeronaves, enlista y compara algunos tipos populares de sensores disponibles
actualmente, analizando sus ventajas y desventajas.
Muestra y explica el código utilizado para medir el movimiento e indicar la posición
de la cabeza, y genera una señal para cada eje de un sistema Alt-Azimutal con la
posición deseada, y de este modo controlar un actuador.
ABSTRACT
The sole purpose of this paper is to create a conceptual design that allows the
usage of MEMS sensors and programmable micro-controller technology in a target
tracking system that can be controlled with head movement from the pilot.
This paper briefly documents the evolution of Aircraft’s onboard weapon systems,
Enlists and compares the advantages and disadvantages of popular kinds of
available sensor technology.
It shows and explains the code used for measuring head movement and updating
position, generating a signal for each axis of an Altitude-Azimuth system with the
desired position, thus controlling an actuator.

ix
ESTADO DEL ARTE
Los sistemas más modernos de Adquisición y seguimiento de objetivo, se
encuentran, sin lugar a dudas en las aeronaves militares de última generación.
Uno de los sistemas más avanzado, es el utilizado en helicóptero BOEING AH-64
APACHE. El cual permite manipular la posición de su torreta o inclusive de un
misil teledirigido por medio del sistema TADS (Target Acquisition and Designtation
Sight), que controla la posición de cámaras infrarrojas y de imagen
monocromática, que muestran al piloto el objetivo y panorama del campo de
batalla en un display monocular, donde se sobrepone información táctica a la
imagen. Este sistema a su vez controla el movimiento de la torreta ubicada en la
parte inferior del helicóptero, de modo que se puede seguir o apuntar a un objetivo
utilizando solamente el movimiento de cabeza.

x
OBJETIVO GENERAL
Crear y comprobar un diseño conceptual que permita la implementación de
un micro controlador en un sistema de seguimiento de objetivo, que sea
capaz de medir el movimiento de cabeza, y controlar la posición de un
actuador por cada eje de un sistema Altazimutal.
OBJETIVOS ESPECÍFICOS
Documentar brevemente la evolución del armamento a bordo de las
aeronaves.
Enlistar información acerca de los sistemas de seguimiento de objetivo y
direccionamiento de armamento.
Enlistar y comparar las características de los componentes necesarios en el
sistema a diseñar.
Desarrollar un código de programación, para el dispositivo micro
controlador PIC 16F876A que interprete la información de los sensores y
sea capaz de manipular dos servomotores que actualicen la posición del
sistema de seguimiento de objetivos.
Emplear el software Proteus 7 para simular el sistema.

xi
JUSTIFICACIÓN
En los últimos años, los dispositivos micro mecánicos han evolucionado de
manera exponencial, y han hecho posible la realización de aplicaciones que hasta
hace no mucho, requerían de una fuerte inversión en sensores electrónicos.
Gracias al desarrollo en la tecnología de estos dispositivos, hoy en día estos
sensores están presentes en nuestra vida diaria, en celulares, aparatos de
ejercicio, vehículos, y videojuegos. Año con año, aumenta su capacidad y
precisión, haciéndolos cada vez más confiables y aptos para servir como enlace
en la interacción Humano-Máquina.
La presente tesina pretende implementar sensores MEMS y micro controladores
programables para controlar un sistema de seguimiento de objetivo, similar a los
sistemas instalados en los helicópteros Apache y las versiones con equipamiento
más moderno del helicóptero Cobra.
Considerando que el costo de fabricación de los sistemas instalados en estos
helicópteros asciende a millones de dólares. Vale la pena desarrollar un diseño
conceptual de un sistema que de resultar viable pudiera realizar algunas de las
funciones de esos sistemas, con un costo extremadamente bajo.
La tendencia MEA, es una filosofía de diseño actual en la cual se busca sustituir
los sistemas mecánicos, neumáticos e hidráulicos por actuadores eléctricos con
mayor capacidad de control, menor consumo de energía y menor peso total del
sistema en la aeronave. Por lo cual se propone el uso de motores eléctricos
controlados por señales de pulsos modulados para mover los sistemas.

1
CAPÍTULO 1
EVOLUICION DE LOS SISTEMAS DE ARMAMENTO EN LAS
AERONAVES

2
1.1 ARMAMENTO EN LAS AERONAVES
Es un hecho innegable que la aeronáutica a nivel mundial, ha estado
estrechamente relacionada con labores de defensa desde sus primeros años. Hoy
en día, no es descabellado decir, que los adelantos tecnológicos de las aeronaves
militares, son la punta de lanza del desarrollo de la aviación, presentando
comúnmente, las tecnologías más avanzadas, o bien, tecnologías establecidas
que ofrecen una madurez y confiabilidad altísimas. Existen actualmente aeronaves
militares que fueron diseñados hace décadas, y hoy en día siguen cumpliendo con
las tareas para las que se les diseñó, de manera eficaz. Los estándares de la
aviación civil son muchas veces adaptaciones de los estándares militares que han
estado vigentes desde antes.
1.1.1 CONCEPTOS
La Organización de Aviación Civil Internacional define a una aeronave como
“Toda máquina que puede desplazarse en la atmósfera por reacciones del aire
que no sean las reacciones del mismo contra la tierra”[1]. Dicho de otra forma es
una máquina capaz de sostenerse en el aire, soportando su propio peso, el de su
estructura, tripulación, pasajeros, instrumentos y sistemas necesarios, carga y/o
combustible.
Una aeronave se sobrepone a la fuerza de gravedad mediante una fuerza de
levantamiento estático o dinámico. La forma más común de generar levantamiento
es provocar una diferencia de presiones en un perfil aerodinámico
Las aeronaves se dividen en dos grandes grupos, aquellas que son más ligeras
que el aire conocidas como aerostatos, y aquellas más pesadas que el aire,
conocidas como aerodinos.
Los aerostatos, fueron las primeras aeronaves en usarse con éxito para
transportar, o simplemente elevar pasajeros humanos. Utilizan aire caliente u otros
gases en grandes contenedores, para que la diferencia en el peso del gas
contenido en su interior, genere una fuerza ascendente que los mantenga
elevados, este fenómeno se conoce como flotación, y no es diferente al efecto
mantiene a flote una boya. En este grupo se encuentran los Globos Aerostáticos y
los Dirigibles, aun cuando estos cuentan con medios para alterar su posición en
vuelo.
Los aerodinos conforman un grupo mucho más extenso, pues de él forman parte
la aeronaves de ala fija, ya sea que sean movidos por hélices o motores a
reacción. Las aeronaves de ala rotativa, como son Helicópteros, autogiros, y
girodinos, también son aerodinos.

3
Existen aeronaves convertibles, en las que los rotores cambian su configuración,
girando 90° para convertirse en hélices propulsoras, y comportarse como un
avión, como podemos apreciar en la figura 2.1 este tipo de aparatos requiere de
mecanismos de gran tamaño, complejos y que están sometidos a esfuerzos muy
grandes, por lo que deben ser suficientemente resistentes para llevar a cabo esa
transición, razón por la cual no son tan populares.
Fig.1.1 Convertiplano Bell-Boeing V-22 Osprey
Existen aeronaves de ala fija propulsados con motores a reacción (Motores “Jet”
Turborreactores o Turbofan), que dirigen el flujo de sus motores, hacia el suelo
generando un empuje vertical que los eleva y después los dirigen hacia atrás para
ganar impulso. Este tipo de aeronaves se conocen como VTOL (Vertical Take Off
and Landing).
Otros métodos de generar levantamiento, incluyen “cuerpo de levantamiento”, en
el que el cuerpo de la aeronave está diseñado para producir levantamiento, si
existen alas, estas son muy pequeñas para producir levantamiento considerable y
son usadas solamente para proveer estabilidad y control. Ejemplos de este tipo
de aeronaves, son algunos aviones supersónicos o hipersónicos experimentales
como el X-24 y algunos misiles supersónicos. [2]
Según el Diccionario Aeroespacial Jane’s, una aeronave militar, es “cualquier
aeronave de ala fija o rotativa, que es operada por un servicio armado Legal o
insurrecto.”
Se distinguen dos tipos de aeronave, aeronaves de combate diseñadas para
destruir equipamiento enemigo usando su propio armamento. Y las no
4
combatientes, que no están diseñadas para el combate como su función principal,
pero pueden llevar consigo armas para defenderse. Este tipo de aeronaves opera
principalmente en roles de apoyo. [3]
Comúnmente se denomina aeronave militar a aquellas utilizadas en cualquier
actividad que tenga que ver con actividades militares o de defensa, como puede
ser, transporte de cargamentos estratégicos, (Tropas, Mandatarios, Provisiones,
Municiones, Uniformes, Etc.), patrullaje, ataque, entrenamiento o reconocimiento.
1.1.2 EVOLUCIÓN DEL ARMAMENTO EN LAS AERONAVES.
Las primeras aeronaves en ser utilizadas para fines militares fueron los globos
aerostáticos. Los cuales fueron ampliamente utilizados en el siglo XIX en medio de
algunas batallas europeas, así como en la guerra civil de los Estados Unidos
(1861-1865) y siguieron siendo utilizados regularmente hasta poco antes de la
segunda guerra mundial, cuando los avances en el desarrollo de aeroplanos los
hicieron obsoletos. Su principal uso era en misiones de reconocimiento y
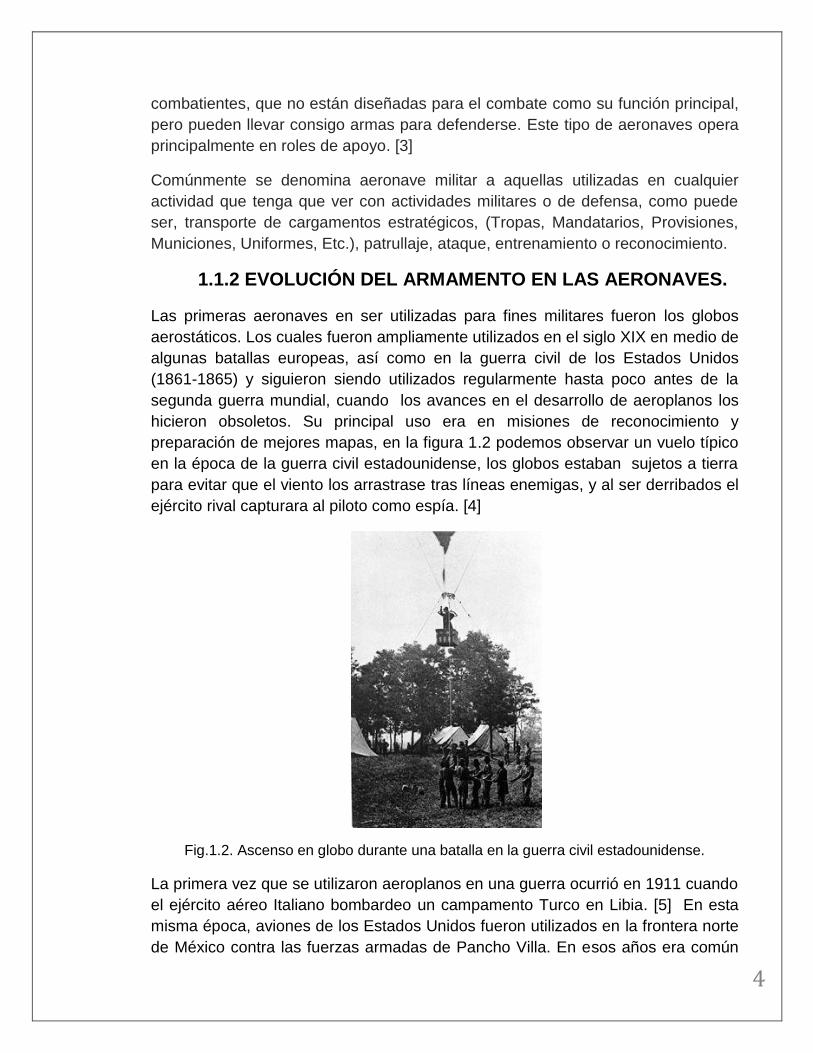
preparación de mejores mapas, en la figura 1.2 podemos observar un vuelo típico
en la época de la guerra civil estadounidense, los globos estaban sujetos a tierra
para evitar que el viento los arrastrase tras líneas enemigas, y al ser derribados el
ejército rival capturara al piloto como espía. [4]
Fig.1.2. Ascenso en globo durante una batalla en la guerra civil estadounidense.
La primera vez que se utilizaron aeroplanos en una guerra ocurrió en 1911 cuando
el ejército aéreo Italiano bombardeo un campamento Turco en Libia. [5] En esta
misma época, aviones de los Estados Unidos fueron utilizados en la frontera norte
de México contra las fuerzas armadas de Pancho Villa. En esos años era común
5
utilizar los aeroplanos para lanzar bombas a los enemigos, así como para realizar
labores de reconocimiento.
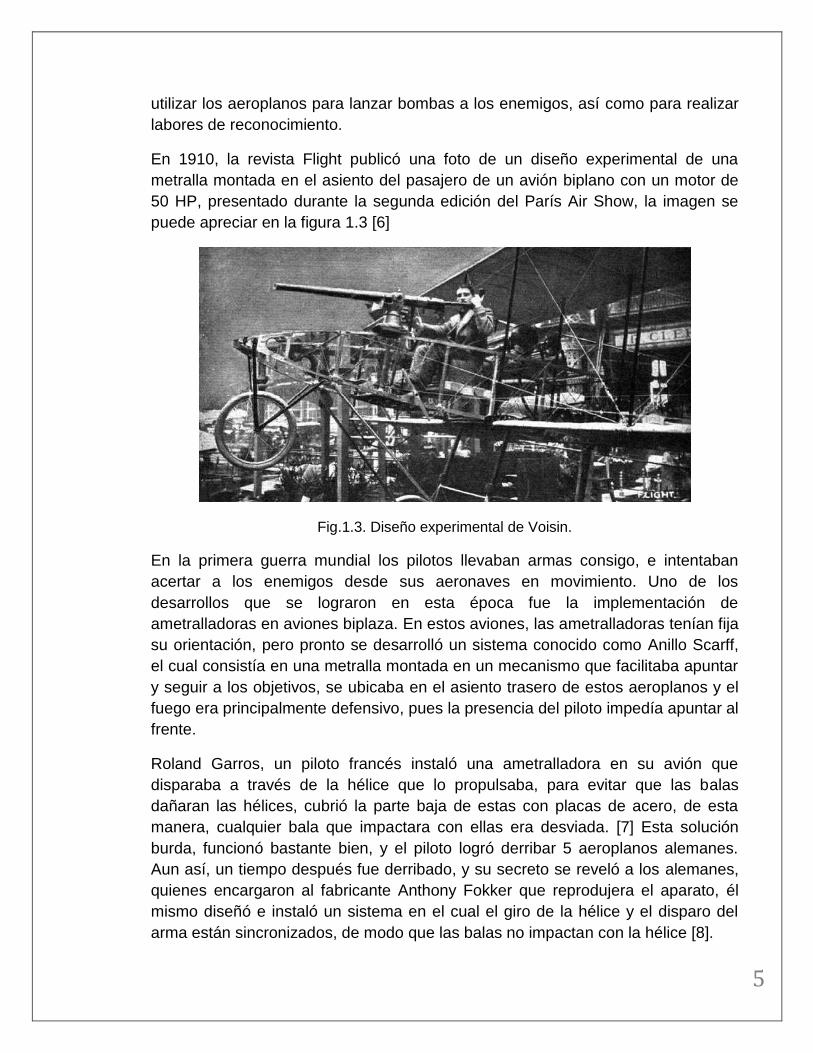
En 1910, la revista Flight publicó una foto de un diseño experimental de una
metralla montada en el asiento del pasajero de un avión biplano con un motor de
50 HP, presentado durante la segunda edición del París Air Show, la imagen se
puede apreciar en la figura 1.3 [6]
Fig.1.3. Diseño experimental de Voisin.
En la primera guerra mundial los pilotos llevaban armas consigo, e intentaban
acertar a los enemigos desde sus aeronaves en movimiento. Uno de los
desarrollos que se lograron en esta época fue la implementación de
ametralladoras en aviones biplaza. En estos aviones, las ametralladoras tenían fija
su orientación, pero pronto se desarrolló un sistema conocido como Anillo Scarff,
el cual consistía en una metralla montada en un mecanismo que facilitaba apuntar
y seguir a los objetivos, se ubicaba en el asiento trasero de estos aeroplanos y el
fuego era principalmente defensivo, pues la presencia del piloto impedía apuntar al
frente.
Roland Garros, un piloto francés instaló una ametralladora en su avión que
disparaba a través de la hélice que lo propulsaba, para evitar que las balas
dañaran las hélices, cubrió la parte baja de estas con placas de acero, de esta
manera, cualquier bala que impactara con ellas era desviada. [7] Esta solución
burda, funcionó bastante bien, y el piloto logró derribar 5 aeroplanos alemanes.
Aun así, un tiempo después fue derribado, y su secreto se reveló a los alemanes,
quienes encargaron al fabricante Anthony Fokker que reprodujera el aparato, él
mismo diseñó e instaló un sistema en el cual el giro de la hélice y el disparo del
arma están sincronizados, de modo que las balas no impactan con la hélice [8].

6
A partir de ese momento, el aeroplano dejó de ser un medio de observación y
pasó a tomar un rol activo en los conflictos bélicos.
Las aeronaves, usualmente tenían cabinas abiertas, y las armas eran operadas
manualmente, a medida que las velocidades de operación de los aeroplanos
incrementaron, se hizo más difícil direccionar las armas, principalmente aquellas
ubicadas en la nariz. Para sobreponerse a este problema, lo aviones fueron
equipados con torretas cerradas y el movimiento era asistido por medios
neumáticos e hidráulicos. En la segunda guerra mundial, eran comunes los
aviones con varias torretas asistidas, y aunque se desempeñaban bien para cazar
bombarderos, eran imprácticos cuando se enfrentaban con aviones más ligeros,
debido al peso y el arrastre parásito que generaban las torretas, eran menos
maniobrables que aquellos aeroplanos equipados con ametralladoras fijas. El
fuego “defensivo”, o direccionado hacia atrás, cayó en desuso y se prefirieron
aviones cuya velocidad y maniobrabilidad les permitieran escapar del fuego
enemigo.
Un avance importante en el desarrollo de las torretas, fue la implementación de
torretas controladas remotamente, lo cual hizo más eficiente su montaje, y permitió
que un solo operador fuese capaz de controlar más de una torreta. El montaje de
estas armas permitía dos grados de libertad, un sistema Altazimutal, el cual
permite el control del movimiento angular de dos ejes perpendiculares. El eje
vertical conocido como Altitud, y el eje horizontal conocido como Azimut, ambos se
miden en grados a partir de su intersección. Este concepto es muy importante
pues las torretas modernas siguen utilizándolo, en la figura 1.4 podemos observar
los dos grados de libertad que existen en el sistema Altazimutal.
Fig. 1.4 Ejes de movimiento Altazimutal.

7
Las aeronaves militares siguieron evolucionando, así como su armamento, para
cuando estalló la segunda guerra mundial, los aviones eran los principales
elementos de ataque de los países combatientes. Su uso se diversificó, fueron
utilizados como bombarderos estratégicos, y para superioridad aérea. Hacia el
final de la segunda guerra mundial, una aeronave B-29 lanzó una bomba nuclear
sobre las ciudades japonesas de Hiroshima y Nagasaki, en uno de los eventos
más fatídicos de la historia humana.
Durante el periodo conocido como guerra fría, la aviación se volcó hacia el uso de
aeronaves con motores a reacción, lo que aumentó drásticamente la velocidad y
altitud de operación de estas.
En la era moderna, el desarrollo de los misiles aire-aire y aire tierra con tecnología
que les permite ser guiados por imágenes térmicas o radar, sin duda disminuyeron
la relevancia de las ametralladoras, principalmente en las aeronaves de ala fija,
aunque hoy en día siguen siendo elementos indispensables en los helicópteros y
aviones más modernos como el F-22 y F-35.
1.1.3 CAÑONES AUTOMÁTICOS Y TORRETAS EN LOS
HELICOPTEROS
La guerra de Vietnam dio por iniciada la era de los Helicópteros con capacidades
de combate, primero con el extenso uso del helicóptero multitarea Bell U-H1 Huey,
el cual incorporaba en algunas configuraciones opcionales una ametralladora
montada en el costado, y operada manualmente. En la imagen 1.5 podemos
apreciar este sistema, y percatarnos que no ofrecía ninguna protección al
operador.
Fig. 1.5 Bell UH1- Iroquois.

8
Debido a la inminente necesidad de un helicóptero de ataque el gobierno de los
Estados Unidos seleccionó al helicóptero AH-56 Cheyenne del fabricante
Lockheed para cumplir con esta misión, sin embargo en 1967 los primeros
helicópteros AH-1G “Cobra” fueron desplegados en Vietnam, al mismo tiempo
que los primeros Cheyenne, los Cobra fueron muy efectivos, y rápidamente se
posicionaron como un excelente helicóptero de ataque. Este modelo incorpora una
torreta montada debajo de la nariz, aunque en un principio era controlada
manualmente, y era de un calibre pequeño, actualizaciones del armamento y
diseño de este helicóptero le han permitido mantenerse activo hasta nuestros días.
A partir de la actualización del armamento conocida como Enhanced Cobra
Armament System, la torreta puede ser controlada con el movimiento de cabeza
del piloto u operador de armamento. En la imagen 1.7 podemos observar la torreta
y los sistemas de captación de imágenes para detectar objetivos, parte del
equipamiento actual de los helicópteros Cobra.[8]
Fig. 1.7 Torreta y sistemas detección de objetivo.
El helicóptero Cobra, cedió su lugar como principal helicóptero de ataque ante el
helicóptero avanzado de ataque Boeing AH-64, introducido en 1982, el cual
representó un gran salto en cuando al sistema de armamento, pues cuenta con un
equipo de sensores en la parte baja de la nariz, para adquisición y designación de
objetivos y visión nocturna. Su armamento básico es un cañón automático M230
de calibre 30 mm. Además está equipado con misiles antitanque AGM-114 Hellfire
y cohetes Hydra 70 en suportes montados en sus alas, y puede portar misiles
antiaéreos AIM-92 Stinger o AIM-9 Sidewinder en los extremos de las alas. Este

9
helicóptero cuenta con un complejo sistema de adquisición y seguimiento de
objetivos, el cañón automático puede ser controlado por el movimiento de cabeza
del piloto.
1.2 TECNOLOGÍA ACTUAL DE ADQUISICIÓN Y
SEGUIMIENTO DE OBJETIVOS
Como ya se ha mencionado, los helicópteros AH-1 Cobra y Boeing AH-64 Apache,
están equipados con tecnología que permite controlar una torreta automática o
inclusive misiles teledirigidos, con el movimiento de cabeza del piloto.
En el caso del helicóptero Apache, la adquisición del objetivo se logra a través del
sistema TADS (Target Acquisition and Designation Sights) desarrollado por
Lockheed Martin en 1982.[9] Contiene sensores óptico-electrónicos y un
designador de objetivo laser. Este sistema se encuentra ensamblado en la parte
frontal del helicóptero, junto con el sistema de visión nocturna del piloto, el sistema
puede rotar en un rango de ±120° en Azimut, y +30°/-60° de elevación, aunque se
encuentran juntos, ambos sistemas pueden rotar independientemente. Los
movimientos del sistema TADS pueden ser “esclavizados“al movimiento de
cabeza del piloto del helicóptero, así, el sistema apuntará hacia donde e piloto fije
su vista, la imagen que se captura en el TADS se envía al piloto para ser
visualizada en el HMD. Como se muestra en la figura 1.8 la imagen que recibe el
piloto es una imagen monocromática, también puede recibir la imagen de la
cámara térmica o de visión nocturna. El plan de desarrollo contempla remplazar la
cámara por una a color de mejor resolución
Fig. 1.8 Imagen presentada en el HMD monocromático de un helicóptero Apache.

10
1.2.1 HELMET MOUNTED DISPLAY
Un Head mounted display, o Helmet mounted display es un dispositivo integrado
en el casco de un piloto, mediante pequeñas pantalla o dos pequeñas pantallas
provee al piloto con información acerca de sus alrededores, como puede ser,
imagen del campo de batalla fuera del campo de visión de la cabina, visión
nocturna, o sistemas de realidad aumentada, donde se muestra información
táctica, aunque en su forma más simple pueden parecer dispositivos sencillos, su
diseño e implementación es bastante complejo. Algunos parámetros principales
para el desarrollo de un HMD son:
Precisión. El error angular en la línea de visión, provocado por diferencias
entre la dirección de la imagen y la posición del casco. Esta línea se utiliza
para dirigir el misil o cañón automático, por lo que el sistema debe estar
calibrada y muy bien colocado en la cabeza del piloto. La línea entre el ojo
del piloto y el display se conoce como línea de visión (LOS). El piloto debe
mantener sus ojos centrados, pues los HMD actuales no puede detectar la
dirección de la mirada, si no la posición de la cabeza.
Latencia (del inglés Latency) Es la magnitud del retraso entre sistema de
detección de la posición y la imagen en el display.
Campo de visión, es el rango angular en el que la vista puede producir una
medición precisa.
Características ópticas, Calibración, resolución, enfoque, display monocular
o binocular
Durabilidad
Costo, de diseño y de entrenamiento
Ajuste con la cabeza del piloto, un casco flojo, o desalineado puede ser
causa de mediciones e imágenes imprecisas.
Los diseños de HMD, deben ser capaces de medir cambios en la elevación,
Azimut y ladeo de la cabeza del piloto, relativos al sistema de referencia
(Aeronave), con una alta precisión aún bajo condiciones de incremento en las
fuerzas g, o cambios rápidos en la posición de la cabeza.

11
1.3 EL SEGUIMIENTO DE LOS MOVIMIENTOS CABEZA
Los sistemas de seguimiento del movimiento de cabeza disponibles actualmente,
se dividen en dos categorías. Ópticos y electromagnéticos.
Los sistemas ópticos emplean emisores infrarrojos en el casco, y detectores
infrarrojos en la cabina (O viceversa), para medir la posición del casco del piloto.
El helicóptero MiG-29/AA-11 Archer, el Eurofighter Typhoon, y el JAS39 Gripen
utilizan esta tecnología.
El seguimiento electromagnético utiliza bobinas en el casco, que se encuentran en
un campo alternador, que producen voltajes eléctricos alternos basados en el
movimiento del casco. Esta técnica requiere de un mapeo preciso de los
elementos magnéticos, tomando en cuenta los materiales ferrosos, conductivos,
en el asiento, y cubierta de la aeronave.
En este diseño, intentaremos implementar sensores electrónicos conectados a
una unidad de control para determinar los movimientos y la posición de la cabeza
del piloto, y poder transmitir ese movimiento a los sensores infrarrojos, o bien
directamente a el cañón automático.

12
CAPÍTULO 2
COMPONENTES Y CARACTERÍSTICAS DEL SISTEMA DE
DETECCIÓN DEL MOVIMIENTO

13
2.1 SENSORES
Un sensor es un dispositivo destinado a medir la magnitud de una variable física o
química, la cual convierte en una señal que puede ser interpretada por un
humano, o bien un dispositivo electrónico.
La señal de salida de un sensor, es generalmente una señal eléctrica que varía su
voltaje en función de la magnitud de la variable de entrada, es recomendable que
esta relación sea lineal, o bien proporcional linealmente a una función matemática
aplicada a la señal de entrada (Comúnmente logarítmica). En la mayoría de los
casos, la señal de salida de los sensores no es apta para su lectura directa o
procesamiento, por lo que se requiere el uso de diversos circuitos para
acondicionar esta señal de salida como son amplificadores y filtros electrónicos de
la señal. Estos circuitos se encargan de adaptar la señal a los niveles apropiados.
Cuando se utilizan sensores en sistemas de adquisición de datos computarizados,
es necesario convertir la señal analógica en una señal digital, lo cual se logra
mediante un convertidor analógico digital. Para estas aplicaciones se debe tener
en cuenta ciertos aspectos de los sensores cómo son:
El rango de medida, es decir, los valores máximos y mínimos que un sensor
puede medir. Cuando los valores extremos de la variable de
instrumentación exceden el rango de medida, los valores de la señal de
salida no serán representativos de las condiciones reales. Un rango de
medición muy amplio y una resolución baja pueden ser necesarios cuando
variable de instrumentación sufre cambios de magnitud muy grandes.
Viceversa, un rango de medida estrecho, pero con una resolución mayor
puede ser necesario para medir variaciones muy pequeñas en aplicaciones
más precisas.
La sensibilidad, está definida como la mínima variación en la señal de
entrada para producir una mínima variación en la señal de salida.
El tiempo de respuesta del sensor, es el tiempo que requiere el sensor para
responder a un cambio en la variable de entrada, de esto depende la
capacidad del sensor para seguir los valores de la variable cuando suceden
cambios bruscos.
La resolución es el cambio mínimo en la variable de entrada que puede ser
detectado por el sensor y que puede ser apreciado en la señal de salida.
14
La Precisión, es el máximo error que se puede encontrar en la señal de
salida, esto crea un margen minúsculo entre el que se deben encontrar los
valores de las mediciones hechas en condiciones idénticas en repetidas
ocasiones, estas tolerancias deben estar consideradas en el diseño.
Offset, es una desviación que se presenta cuando el valor de la variable a
medir es 0, pero se obtiene un valor diferente en la señal de salida.
Si el sensor tiene una salida digital, esta señal es en realidad una
aproximación a la variable de entrada, por lo que presenta un pequeño error
de digitalización.
La sensibilidad debe ser constante a lo largo de todo el rango de medición,
en caso contrario, no existe linealidad en las mediciones, si esta condición
no es calibrada adecuadamente los valores arrojados no serán correctos.
La Histéresis es un error causado cuando la magnitud de la señal cambia
de dirección, pero existe un pequeño retraso en el tiempo de respuesta del
sensor, creando un pequeño error que depende del estado anterior de la
señal, siendo diferente para una señal que crece o decrece, los sistemas
mecánicos y magnéticos son particularmente susceptibles a este error.
La mayoría de los sensores son particularmente sensibles a la temperatura
del ambiente en el que se encuentran, por lo que es necesario hacer
ajustes para tomar en cuenta este factor en las mediciones.
Los errores son acumulativos, por lo que existe cierta interdependencia
entre los componentes, por ejemplo, un sensor de alta calidad verá
reducido su desempeño si se utiliza un convertidor AD de baja calidad.
Los errores y desviaciones pueden clasificarse en dos grupos, los errores
sistemáticos y los errores aleatorios. Los errores sistemáticos pueden ser
compensados por alguna forma de calibración del sistema, por otro lado, los
errores aleatorios se pueden reducir utilizando filtros en la señal.
Para el desarrollo de este proyecto, es necesario comprender los principios de
funcionamiento de dos clases de sensores. Aquellos que miden la aceleración,
llamados acelerómetros, y aquellos que son sensibles a los movimientos
angulares llamados giroscopios.

15
2.1.1 GIROSCOPIOS
Un giróscopo es un dispositivo utilizado para medir o mantener la orientación, este
dispositivo funciona bajo el principio del momento de inercia angular, Los
giróscopos mecánicos consisten de un disco giratorio montado en una estructura
de suspensión Cardán que consiste en dos aros concéntricos cuyos ejes forman
un ángulo recto. Cuando se montan 3 aros de cardán, el aro interior será
independiente de la rotación del soporte. Este arreglo se puede apreciar en la
figura 2.1. En el aro interior se coloca el eje de rotación del disco giratorio, y de
este modo se mantiene prácticamente independiente del efecto del torque en la
estructura.
El plano descrito por la rotación del disco mantendrá su orientación con un mínimo
desajuste acumulado por el tiempo, existen diferentes tipos de giroscopios,
haciéndolo un dispositivo muy versátil por lo cual han sido usados extensamente
como sistemas de referencia inerciales.
Fig. 2.1 Dibujo de un giróscopo.
2.1.1.1 Giroscopio de anillo laser
Un giróscopo de anillo laser consiste en un anillo formado por dos ases luz
propagándose en sentidos opuestos, la rotación del anillo induce una pequeña
diferencia entre el tiempo en que la luz atraviesa el anillo en las dos direcciones,
debido al efecto Sagnac. Esto hace que haya una pequeña separación en la
frecuencia de los ases, un movimiento en la onda estacionaria y por lo tanto un

16
patrón de “golpes” (Del inglés beats) cuando los dos ases se interfieren en la
salida del anillo. De esta forma, el cambio neto del patrón de interferencia varía
con respecto a la rotación del dispositivo en el plano del anillo.
Aunque son más precisos que los giroscopios mecánicos, sufren de un efecto de
“estancamiento” en velocidades de rotación muy bajas. Cuando el anillo laser gira
a una velocidad angular muy baja, las frecuencias de los ases viajando en sentido
contrario se vuelven casi idénticas, La interferencia cruzada entre ambos ases
provoca que la onda estacionaria se “estanque” en una fase, haciendo que la
frecuencia de cada as sea la misma que la de el otro, en lugar de responder a la
variación gradual.
El “tramado” (En inglés Dithering) forzado puede ayudar a sobreponerse a este
problema. La cavidad del anillo laser se rota alternativamente de manera
mecánica a su frecuencia de resonancia. Esto asegura que la velocidad angular
del sistema se encuentre usualmente lejos del límite de estancamiento. Aunque el
tramado no resuelve completamente este problema, pues en cada cambio de
dirección existe un pequeño momento en el que la velocidad angular es casi cero
y puede ocurrir un estancamiento brevemente. En la figura 2.2 podemos observar
el recorrido que realizan los ases de luz, así como el pequeño motor piezoeléctrico
de tramado y el tipo de patrón que genera la interferencia.
Fig. 2.2 Esquema del funcionamiento de un giroscopio laser.
Los giróscopos de anillo laser pueden ser usados como elementos estables en
sistemas inerciales de referencia, uno por cada grado de libertad. La ventaja de
usar este tipo de acelerómetros, es que no hay partes móviles (A excepción del
motor de tramado). Esto indica que no hay fricción lo que reduce la desviación. El

17
dispositivo completo es compacto, y liviano, haciéndolos apropiados para su uso
en aeronaves.
Los giroscopios de fibra óptica funcionan con el mismo principio, a excepción de
que el medio de propagación por el cual viajan los ases de luz, es una bobina
formada por fibra óptica, llegando a tener longitudes de hasta 5km. La intensidad
del efecto Sagnac se ve afectada positivamente con el número de giros de la
bobina.
2.1.1.2 Giroscopio MEMS
Un giróscopo micro maquinado utiliza una estructura vibrante de cuarzo que es
sensible a las rotaciones gracias al efecto Coriolis. Normalmente hay dos masas
vibrando en fases opuestas sobre un eje, este eje es conocido como “drive axe”.
Cuando el dispositivo gira, la fuerza de Coriolis crea una vibración sobre un eje
ortogonal a la velocidad lineal del eje “Drive” y a la velocidad angular. Cómo es
proporcional a la velocidad angular , esta vibración es la base para el cálculo de
la aceleración. Este nuevo eje es llamado “Eje de medición”.
La fuerza de Coriolis es la componente dinámica de la fuerza inercial, más su
existencia depende de una velocidad linear, mientras que la otra componente de
fuerza , la fuerza centrifuga, siempre está presente Estas fuerzas son
abstracciones de la inercia vistas desde un marco referencial que gira. En la figura
2.3 observamos un diagrama que muestra el sentido en el que se presenta la
fuerza de Coriolis, así como su fórmula.
Fig. 2.3 Efecto Coriolis.

18
La mayoría de los giroscopios MEMS disponibles actualmente utilizan una
configuración de “tenedor de afinación” (Del inglés Tuning Fork). Dos masas
oscilan constantemente en direcciones opuestas. Cuando se aplica una velocidad
angular, la fuerza del efecto Coriolis en cada masa actúa en direcciones opuestas,
lo que resulta en una variación de la capacitancia. Este cambio diferencial en el
valor de la capacitancia es proporcional a la velocidad angular, por lo que se
convierte en voltaje en la salida para giróscopos análogos, o en un LSB para
señales digitales. En la figura 2.4 podemos observar cómo actúa la fuerza de
Coriolis en sentido opuesto cuando el dispositivo gira alrededor del eje z. (Yaw)
.
Fig. 2.4 Esquema de un giroscopio cuando se aplica una velocidad angular.
Cuando el dispositivo se ve sometido a una aceleración lineal, ambas masas se
ven sometidas a la misma fuerza y moverán en el mismo sentido. Por lo que no se
detectará un cambio en la capacitancia, lo cual producirá una diferencia 0 en el
voltaje de salida o 0 LSB, por lo que los giróscopos MEMS no son sensibles a la
aceleración linear.
En la figura 2.5 podemos observar como se ha ido reduciendo el tamaño de los
giroscopios MEMS en los últimos años, haciendo posible aplicaciones donde los
sistemas de medición deben ser muy pequeños.
Fig. 2.5 Comparación del tamaño de los giróscopos MEMS en los últimos años.

19
2.1.2 ACELERÓMETROS.
Se conoce como acelerómetro a una familia de dispositivos capaces de medir la
"aceleración". Casi siempre la aceleración medida por los acelerómetros no es
aquella que relaciona la velocidad final e inicial de un objeto en un sistema de
coordenadas, si no la aceleración asociada con el fenómeno del peso de una
masa de prueba que se encuentra dentro del marco de referencia el dispositivo.
Cómo ejemplo, un dispositivo de este tipo que se encuentra en reposo sobre una
superficie fija en la tierra arrojará una medición de 1g (Debido a su peso), aun
cuando no hay un cambio de velocidad (Hablamos entonces de una aceleración
estática), en cambio, un dispositivo en caída libre (En que su velocidad aumenta
constantemente) medirá una aceleración de valor 0g, pues se encuentra en un
marco referencial en el que no tiene peso, sin embargo, debido a la presencia del
aire en la atmosfera, el dispositivo no experimentará una caída libre, pues es
afectado por la fuerza de arrastre. Cuando el dispositivo alcance su velocidad
terminal, la fuerza de arrastre y la atracción gravitacional serán de igual magnitud
pero en sentido inverso, y el acelerómetro volverá a indicar una aceleración 1g.
Aunque las unidades del SI para cuantificar la aceleración son: ,
generalmente los valores obtenidos por los acelerómetros se expresan en
unidades de "fuerza g".
En concepto, un acelerómetro se comporta como un sistema masa resorte
amortiguado el cual podemos observar en la figura 2.6. Cuando el acelerómetro es
sometido a una aceleración externa, la masa de prueba se desplaza de su
posición neutral, este desplazamiento es medido, ya sea de manera analógica o
digital para obtener la aceleración.
Fig. 2.6 Sistema masa resorte amortiguado

20
Elegir entre un acelerómetro digital o analógico está determinado por el tipo de
hardware con el que interactuará el acelerómetro. Los acelerómetros analógicos
entregan una señal eléctrica continua en la que el voltaje es proporcional a la
aceleración, cuando se usan PIC con entradas analógicas, o circuitos analógicos,
son una buena opción, y no requieren de la implementación de un convertidor AD
externo que retrasaría la señal en el proceso.
Cuando las entradas de la unidad que procesará la información, son únicamente
digitales, se necesitará de un acelerómetro digital, que generalmente entrega a la
salida una señal de PWM. Esto presenta una desventaja pues consumirá más
recursos del micro controlador.
Unos de los factores más importantes a tomar en cuenta en un cuenta cuando se
elige un acelerómetro, es el número de ejes, pues dependiendo de la aplicación
final podría bastar con los datos obtenidos en 2 ejes. Con un tercer eje (O bien dos
acelerómetros de dos ejes, colocados en ángulo recto) se obtiene mayor precisión
y se incrementan las posibles aplicaciones. Es posible y relativamente sencillo
determinar la inclinación de un aparato si medimos los componentes que induce la
gravedad en cada eje del acelerómetro.
2.1.2.1 Acelerómetros mecánicos
El más simple de los acelerómetros, se compone de una masa unida a un
dinamómetro, aunque también puede estar unida a resortes elásticos. Los
desplazamientos de la masa de prueba se miden con galgas extensiométricas, la
aceleración produce una deformación de la galga que se traduce en una variación
en la corriente detectada por un puente de Wheatstone, la deformación es
directamente proporcional a la aceleración aplicada al acelerómetro. En la figura
2.7 podemos ver el esquema de un acelerómetro de este tipo.
Fig. 2.7 Esquema de un acelerómetro mecánico de galgas extensiométricas

21
Algunos sistemas utilizan sistemas rotativos desequilibrados, los cuales, al ser
sometidos a una aceleración originan movimientos oscilatorios, estos son
conocidos como servo acelerómetros.
2.1.2.2 Acelerómetros capacitivos
En un acelerómetro capacitivo, cuando es sometido a una aceleración, este
modifica la posición relativa de las placas de un micro condensador, aumentando
o disminuyendo la capacitancia de este, en función de la distancia entre sus
placas.
En su forma de construcción más sencilla, un acelerómetros capacitivo, asemeja
una letra H, como el que se muestra en la figura 2.8 en la cual una viga rígida
central está sujeta a la carcasa en sus dos extremos por dos elementos elásticos,
sujeto a la viga central se encuentra una placa que actúa como base común para
dos placas situadas equidistantemente (En estado de reposo ) a los lados de esta,
entre las placas se crea un dieléctrico, y al variar la distancia de las placas de
manera simultánea, la comparación diferencial de ambas capacitancias es
convertida en un voltaje proporcional a la aceleración experimentada.[8]
Fig. 2.8 Acelerómetro en reposo (Izq.) y siendo afectado por una aceleración (Der.)
Debido a que la magnitud de la capacitancia varía en función de la distancia entre
2 placas conductoras, se han ideado diferentes arreglos para este tipo de
acelerómetros.
Existen arreglos para medir el desplazamiento con solo una medición de
capacitancia, debida al movimiento de las placas, que puede ser paralelo o
vertical. Estos arreglos pueden ser tan sencillos como usar solamente dos placas
paralelas, o a modo de "Dedos" en los que las placas se deslizan entre los
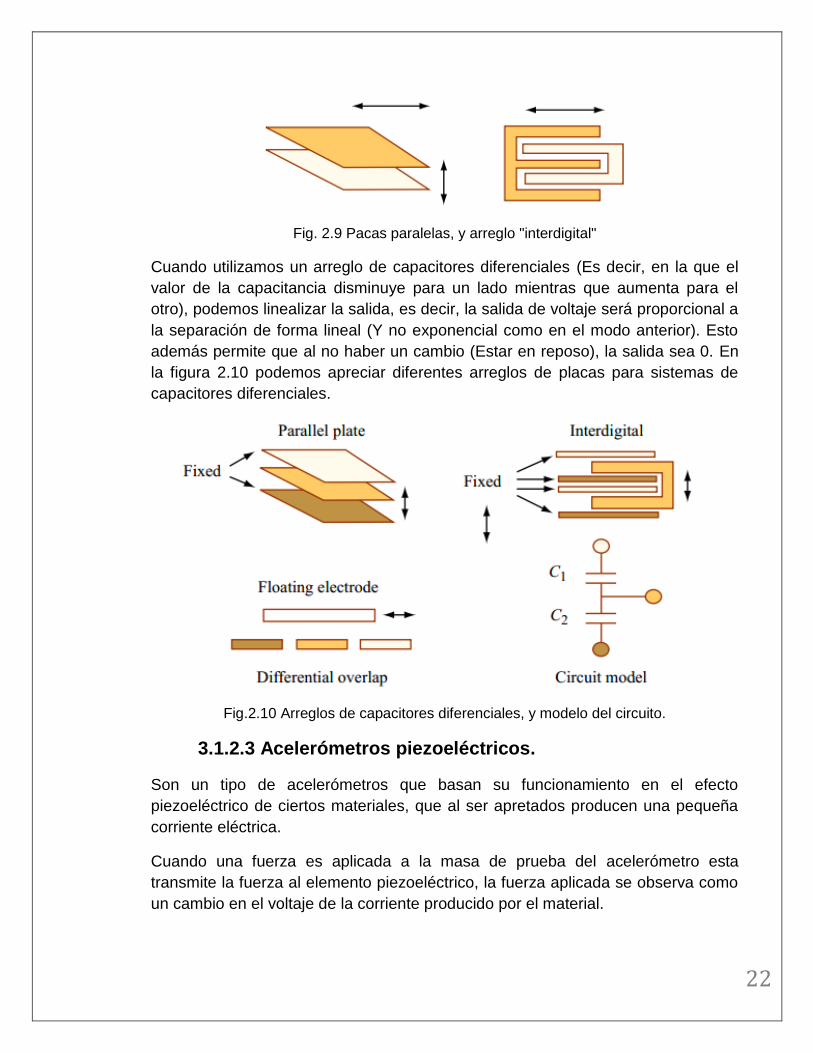
espacios del arreglo. Estos dos arreglos pueden apreciarse en la figura 2.9.
22
Fig. 2.9 Pacas paralelas, y arreglo "interdigital"
Cuando utilizamos un arreglo de capacitores diferenciales (Es decir, en la que el
valor de la capacitancia disminuye para un lado mientras que aumenta para el
otro), podemos linealizar la salida, es decir, la salida de voltaje será proporcional a
la separación de forma lineal (Y no exponencial como en el modo anterior). Esto
además permite que al no haber un cambio (Estar en reposo), la salida sea 0. En
la figura 2.10 podemos apreciar diferentes arreglos de placas para sistemas de
capacitores diferenciales.
Fig.2.10 Arreglos de capacitores diferenciales, y modelo del circuito.
3.1.2.3 Acelerómetros piezoeléctricos.
Son un tipo de acelerómetros que basan su funcionamiento en el efecto
piezoeléctrico de ciertos materiales, que al ser apretados producen una pequeña
corriente eléctrica.
Cuando una fuerza es aplicada a la masa de prueba del acelerómetro esta
transmite la fuerza al elemento piezoeléctrico, la fuerza aplicada se observa como
un cambio en el voltaje de la corriente producido por el material.

23
En la figura 2.11 podemos observar el esquema básico del funcionamiento de un
acelerómetro piezoeléctrico.
Fig. 2.11 Esquema de un acelerómetro piezoeléctrico
Los materiales utilizados en los acelerómetros se categorizan en dos grupos:
Cristal sencillo son los más usados, siendo el cuarzo el material cuyo uso
está más extendido. Aunque estos materiales ofrecen un periodo de vida
más extendido, su principal desventaja es que generalmente ofrecen una
sensibilidad menor que los materiales cerámicos.
Los materiales cerámicos: por su parte tienen una mayor sensibilidad y su
costo de producción es menor. Entre los materiales usados se encuentra el
titanato de bario, zirconato de plomo, titanato de plomo, metaniobato de
plomo y otros materiales cuya composición es considerada propiedad de
las compañías responsables de su desarrollo. La principal desventaja de
estos materiales, es que su sensibilidad se degrada con el tiempo,
reduciendo su vida útil drásticamente en comparación con los dispositivos
de cristal sencillo.
Para aplicaciones en que se usan piezoeléctricos de baja sensibilidad, se pueden
conectar dos o más cristales juntos para tener una mayor salida. Para una
aplicación particular, el material adecuado puede ser seleccionado en base a su
sensibilidad y respuesta en frecuencia. Debido al bajo nivel de la señal y alta
impedancia de salida que poseen los acelerómetros piezoeléctricos, es necesario
amplificar y convertir la impedancia de la señal producida. Este problema solía
solucionarse utilizando un amplificador y convertidor de impedancia externo. Sin
embargo, este método es poco práctico debido al ruido que se introduce en a

24
señal. Actualmente estos amplificadores y convertidores están disponibles en
circuitos integrados y generalmente están incluidos en la misma carcasa que el
acelerómetro.
2.1.2.4 Acelerómetros térmicos
Los acelerómetros térmicos son desarrollados por la empresa MEMSIC, el modo
en el que miden las aceleraciones es muy diferente a los demás tipos, y no
involucra partes móviles. Utiliza moléculas de gas calentadas para detectar la
aceleración usando termopares. Una resistencia central se calienta e induce su
calor a las moléculas de gas, los sensores de temperatura ubicados en los
extremos, miden la diferencia de los valores.
Cuando un acelerómetro térmico se somete a una aceleración, las moléculas
menos densas del gas calentado se mueven en la dirección de la aceleración, y
las moléculas frías y más densas se en la dirección contraria, creando una
diferencia en la distribución de la temperatura. La variación de la temperatura en
cada extremo de la estructura del acelerómetro es proporcional a la aceleración a
la que es sometido.[9]
En la figura 2.12 podemos observar cómo se distribuye la temperatura alrededor
de la burbuja de gas caliente cuando esta ve alterada su posición debido al efecto
de una aceleración.
Fig.2.12 Esquema de un acelerómetro térmico y distribución de la temperatura
2.1.2.4 Acelerómetros micro mecánicos (“MEMS”)
El primer acelerómetro micro mecanizado fue diseñado en la universidad de
Stanford en 1979, pero llevó más de 15 años para que fueran utilizados
comúnmente en la industria, estos dispositivos tienen un gran potencial comercial
y hacen posible la realización de muchos proyectos tecnológicos. Requieren de

25
menos energía, son compactos, y sus lecturas son altamente confiables.
Frecuentemente se combinan múltiples sensores para obtener mediciones multieje
y datos más precisos.
Los dispositivos micro maquinados están construidos con componentes de entre 1
100 micrómetros de tamaño (0.001-0.1mm) y los dispositivos suelen tener un
tamaño en el rango de 20 micrómetros a un milímetro (0.02-1-00mm).
En la figura 2.12podemos observar cómo ha disminuido el tamaño de estos
dispositivos en los últimos 30 años.
Fig. 2.12 Comparación de las dimensiones de acelerómetros MEMS (1980, 1995,2006)
Son un resultado directo del desarrollo de la tecnología de semiconductores y
circuitos integrado y actualmente están disponibles en una gran variedad de
rangos de medición, llegando a sensar hasta el orden de miles de “g”. Se
distinguen 3 categorías principales de acelerómetros MEMS, el capacitivo de
silicio, piezorresistivos y los acelerómetros térmicos. La mayoría de los
acelerómetros MEMS corresponden a la primera categoría. En la figura 2.14
podemos observar las el interior del encapsulado de un acelerómetro micro
mecánico actual..
Fig. 2.13 Esquema del interior del encapsulado de un dispositivo MEMS

26
2.2 UNIDAD DE CONTROL
Para llevar a cabo el monitoreo y posicionamiento de nuestro sistema, las señales
a la salida de los sensores deben ser interpretadas, y analizadas para ordenar el
movimiento de los actuadores automáticamente. La comunicación entre los dos
extremos del sistema se lleva a cabo en una unidad de procesamiento. La unidad
debe ser capaz de realizar de realizar las funciones necesarias en tiempo real, y
tomar las decisiones sobre el comportamiento del sistema de acuerdo a los
algoritmos contenidos en su programación.
2.2.1 MICROCONTROLADORES
Los micro controladores son ampliamente utilizados para automatizar y controlar
una gran variedad de sistemas, que varían en complejidad, desde muy sencillos
con unos pocos componentes, hasta sistemas complejos de robótica,
automatización industrial o aplicaciones aeroespaciales.
Su gran versatilidad se debe que son circuitos integrados programables, que
contiene todos los elementos de una computadora completa. Sus puertos de
entrada y salida están diseñados para permitir la conexión de sensores y
actuadores requeridos el dispositivo al que va a controlar. Debido su tamaño
reducido, suele estar incorporado en el dispositivo al que controla por lo que se le
denomina “Controlador incrustado”. Una vez que ha sido programado, el micro
controlador solamente sirve para realizar la tarea que le fue asignada. Aunque
actualmente, dependiendo de su tecnología, existen micro controladores que
pueden ser reprogramados en repetidas ocasiones.
Un micro controlador, no debe confundirse con un microprocesador, pues el micro
procesador es un circuito que contiene la Unidad Central de Proceso, conocida
como “Procesador” de una computadora. La UCP está formada por la Unidad de
Control, que interpreta las instrucciones y el flujo de datos, los buses del
microprocesador, permiten a este interactuar con el hardware acopándole los
módulos necesarios. Un micro controlador es un sistema cerrado que contiene una
computadora completa en su interior, sus características son limitadas y no se
pueden modificar.
En un principio los micros controladores se programaban solamente en lenguaje
ensamblador, pero actualmente se usan varios lenguajes de alto nivel para
programarlos. Estos lenguajes pueden estar diseñados específicamente para
trabajar con Micro controladores, o ser versiones “Dialectos” especiales de
lenguajes más populares, tal es el caso del lenguaje C. Los compiladores de estos
lenguajes para micro controladores, facilitan el trabajo de programación, aunque

27
también representan algunas restricciones. En realidad, el compilador PCB que
utilizaremos en el desarrollo de este diseño “Traduce” el programa escrito en
lenguaje C, a un programa de lenguaje ensamblador con extensión “.Hex” . Este
es el verdadero programa que se graba en el micro controlador.
Las partes principales que integran un micro controlador son:
Procesador. Los más sencillos son de 4 bits, y usualmente son de 8, pero
también existen procesadores más complejos que pueden ser de 32 o
hasta 64, bits, o utilizar una arquitectura Harvard o de Princeton (Von
Neumann).
Memoria no volátil (Aquí es donde se almacena el programa). Actualmente
puede ser de tipo ROM (Read Only Memory) o de tipo EEPROM
(Elcectronically Erasable Programable ROM) o Flash. El programa puede
ser de solo unos cuantos Kb o varios Mb.
Memoria de lectura y escritura para guardar los datos (RAM). En esta,
memoria se guardan los datos de las lecturas de los sensores, los cálculos
del programa, los valores de las variables, es decir, los datos que se
generan a partir de la aplicación del programa.
Interfaces para el control de periféricos
o En paralelo
o En serie
o Otros puertos de comunicación como pueden ser BUS I2C o USB
o Entradas y salidas discretas, para controlar o detectar el estado
lógico de un pin individualmente.
Generador de reloj, Típicamente se utiliza un cristal de cuarzo, el cual tiene
una frecuencia de oscilación constante de aproximadamente 4MHz.
También se pueden utilizar otro tipo de oscilador, como es el caso del
Oscilador con resistencia y condensador, el cristal de alta velocidad, el de
baja frecuencia y bajo consumo de potencia, o bien hacer uso de una señal
de reloj externa.
-Recursos auxiliares
o Convertidores AD/DA
o Watchdog
28
o Protección ante fallas en el suministro de corriente
o Moduladores PWM (Generan, una señal discreta de pulsos
rectangulares de amplitud controlada)
Al tener una integración de este tipo, en donde la todos, o la mayoría de los
componentes necesarios para el control de un sistema, reduce drásticamente el
número de chips, el cableado y el tamaño del circuito, en comparación con un
sistema equivalente utilizando componentes por separado. El hecho de que a
cada Pin se le pueda asignar una función mediante el software, en lugar de estar
dedicados a una función desde el principio, permite que sean utilizados en una
inmensa variedad de aplicaciones.
2.2.2 CONVERTIDOR A/D (ANALÓGICO A DÍGITAL)
Un convertidos analógico digital (ADC en Inglés o CAD), es un dispositivo que
convierte una cantidad física en un número digital equivalente que representa la
amplitud de las la señal analógica. Es un elemento indispensable en un sistema de
adquisición de datos, pues puede constituir por si mismo uno.
El desarrollo de los microprocesadores y los procesadores digitales de señal
(DSP) han permitido realizar tareas que durante mucho tiempo fueron realizadas
por dispositivos analógicos. Pero como el mundo sigue real sigue siendo análogo
es necesario un puente que enlace las variables analógicas con los procesos
digitales, este enlace se logra a través de un convertidor A/D.
La conversión involucra la cuantificación de la entrada por lo que invariablemente
se introduce un pequeño error.
En lugar de realizar una sola conversión, un CAD, toma muestras de la señal
periódicamente. Como resultado se obtiene una secuencia de valores digitales
que fueron convertidos de una señal de tiempo y amplitud continuos en una señal
de tiempo y amplitud discretos.
Un convertidor analógico digital está definido por su ancho de banda (El rango de
las frecuencias que puede medir) y su relación señal/ruido (Que tan precisas son
sus medidas, comparadas con el ruido que introduce). El ancho de banda está
caracterizado principalmente por la frecuencia de muestreo, la cual debe ser al
menos el doble, relaciones menores pueden provocar un fenómeno de Aliasing
(Efecto que causa que diferentes señales sean indistinguibles entre si al momento
de ser muestreadas, y la distorsión que se genera al reconstruir la señal de
manera digital). Si el CAD opera a una frecuencia de muestreo mayor al doble

29
del ancho de banda de la señal, entonces se puede llevar a cabo una
reconstrucción perfecta y despreciar el error de cuantificación.
El rango dinámico de un CAD se ve influenciado por diversos factores, incluidos la
resolución, linealidad, y precisión, y errores de sincronización. Generalmente se
mide en términos del número efectivo de Bits (ENOB), el número de bits n cada
medida que en promedio no son ruido. En un convertidor AD ideal el ENOB es
igual a la resolución.
La resolución de un convertidor indica el número de valores discretos que puede
producir para el rango de valores analógicos en la señal de entrada. La resolución
determina el magnitud del error de cuantificación, por lo que determina la relación
máxima de Señal/ruido de un convertidor ideal sin usar sobre-muestreo.
Los valores de la resolución están comúnmente expresados en un número de bits,
representando un número binario, en consecuencia el número disponible de
niveles o valores es una potencia de 2. Por ejemplo un convertidor con una
resolución de 8 bits puede codificar una señal análoga hasta en 256 niveles.
Al muestrear una señal de entrada, el CAD almacena su valor analógico en
instantes de tiempo fijos (periodo de muestreo) determinados por el circuito de
muestreo y retención. Si la información que porta la señal no experimenta cambios
bruscos se puede muestrear a frecuencia baja sin temor a perder información
crucial de la señal. Sin embargo, si la señal de interés fluctúa con velocidad, una
velocidad de muestreo baja conlleva pérdida de información cuando se trata
reproducir la señal original a partir de las muestras. En estos casos es necesario
muestrear con mayor velocidad para asegurar la reproducción fiel de la señal
capturada.
3.2.2 TIPOS DE CONVERTIDORES AD
Existen diferentes tipos de convertidores AD, algunos de los cuales se enlistan a
continuación.
Flash ADC (DAC de conversión directa), tiene un grupo de comparadores
muestreando la señal de entrada en paralelo, cada uno se activa cuando l
voltaje está en su rango asignado. El banco de comparadores alimenta a
un circuito lógico que genera un código para cada rango de voltaje. La
conversión directa es muy rápida, y permite velocidades de muestreo en el
orden de los GHz, pero generalmente solo tiene 8 bits de resolución o
inclusive menos. Debido a que el número de comparadores se duplica por
cada bit adicional requerido, el espacio requerido es mayor, se presenta

30
alta capacitancia en la entrada, mayor disipación de potencia y son
propensos a producir errores en la salida, pudiendo entregar un código
fuera de secuencia.
CAD de aproximaciones sucesivas, utiliza un comparador para reducir
sucesivamente el rango que contiene al voltaje de entrada. En cada paso
sucesivo, el convertidor compara el voltaje de entrada con la salida de un
convertidor Digital-Analógico (CDA en español DAC en inglés), que puede
representar el punto medio de un rango de voltaje seleccionado. En cada
paso de este proceso, la aproximación es almacenada en un registro de
aproximaciones sucesivas (En inglés SAR).
CAD de rampa. Produce una señal de tipo diente de sierra que se eleva o
baja y luego regresa rápidamente a cero. Cuando la rampa empieza, un
reloj empieza contar. Cuando el valor de la rampa es igual al de la señalo
de entrada un comparador es activado, y el valor del reloj se registra. Este
tipo de comparador requieren menos transistores.
CAD Wilkinson, está basado en la comparación de un voltaje de entrada
con el voltaje producido por un capacitor cargando. Se permite que el
capacitor cargue hasta que su voltaje es igual a la amplitud del pulso de
entrada, se utiliza un comparador para determinar cuándo se alcanza esta
condición. En ese momento se deja que el capacitor se descargue
linealmente, lo que produce un voltaje en rampa Cuando el capacitor
comienza a descargarse un pulso se genera, y permanece activo hasta que
el capacitor está completamente descargado. Este pulso opera una
compuerta que permanece abierta mientras el pulso esté activo, y recibe
pulsos de un reloj de oscilador de alta frecuencia. El número de pulsos de
reloj que entran por la compuerta se registra y es proporcional a la amplitud
del pulso de entrada.
CAD integradores o de doble rampa, aplica el voltaje desconocido a la
entrada de un integrador y permite que el la rampa de voltaje ascienda por
un periodo fijo de tiempo (Tiempo de subida). Entonces un voltaje de
referencia de polaridad opuesta se aplica al integrador y se deja que la
rampa descienda hasta el punto en que la salida del integrador regresa a
0(Tiempo de bajada). El voltaje de entrada se calcula en función del voltaje
de referencia y del tiempo de subida (que es constante) y tiempo de bajada.
Generalmente el tiempo de bajada se mide en unidades del reloj del
convertidor, por lo que tiempos más largos de integración permiten una

31
mayor resolución. De forma inversa se puede aumentar la velocidad del
convertidor s se sacrifica la resolución.
Convertidores sigma delta, aumentan la tasa de muestreo por resolución.
Las señales son muestreadas a una tasa mucho mayor que la de Nyquist,
pero con un solo bit de resolución en amplitud. La señal análoga de entrada
y el flujo de bits, cuya densidad de un bit es una representación de la
magnitud de la señal análoga, son sumadas. Luego son integradas y entran
a un comparador, el cual tiene como salida 0 o 1 dependiendo si la salida
del integrador es mayor o menor que el voltaje de referencia del
comparador
Una de las ventajas de utilizar un micro controlador, es que generalmente están
equipados con la tecnología necesaria para que sus buses de entrada o salida
puedan ser utilizados de forma analógica o digital. Gracias a esto el convertidor
analógico-digital requerido para llevar a cabo este diseño, podemos prescindir de
un elemento físico externo, y así se ahorra espacio, y se facilita el desarrollo.
2.3 ACTUADORES
En una máquina o sistema controlado a distancia, de manera automática o
semiautomática, un actuador es el elemento encargado de la parte operativa. El
actuador recibe una orden del sistema de control y convierte la energía que se le
aplica en un trabajo útil en la ejecución de tareas previamente establecidas.
Los actuadores son ampliamente utilizados como mecanismos para realizar o
prevenir el movimiento. Existen diferentes tipos de actuadores, como pueden ser:
Hidráulicos, consisten en un cilindro con un fluido en su interior, que utiliza
la potencia hidráulica para facilitar la operación mecánica. Como los
líquidos son prácticamente incompresibles, un actuador hidráulico puede
ejercer una fuerza considerable, pero su aceleración y velocidad son
limitadas.
Neumáticos, convierten energía creada por vacío o por aire comprimido a
alta presión en un movimiento rotatorio o lineal. Pueden generar grandes
fuerzas con cambios de presión relativamente pequeños. Generalmente se
usan en diafragmas para mover válvulas.
Eléctricos, son movidos por motores o solenoides, que convierten la
energía eléctrica en movimiento, son limpios, efectivos y pueden tener una
gran variedad de usos.

32
Los parámetros que se toman en cuenta a la hora de elegir un actuador incluyen la
velocidad que pueda alcanzar, fuerza, aceleración y eficiencia energética.
También deben considerarse factores como el peso, volumen que ocupan,
durabilidad y condiciones de operación.
Cuando se habla de fuerza en actuadores, se deben considerar dos tipos
diferentes .La carga estática es la fuerza que ejerce o puede soportar un actuador
cuando no está en movimiento. Y la carga dinámica es la fuerza que puede ejercer
el actuador en movimiento, ambos parámetros deben considerarse por separado y
pueden ser de vital importancia para la aplicación final. La velocidad se mide sin
carga, pues esta disminuirá invariablemente cuando una carga sea aplicada. Se
deben tomar en cuenta las condiciones en las que operará el actuador, así como
la durabilidad de este. Estos dos últimos factores están relacionados directamente,
pues condiciones de operación inadecuadas pueden acelerar el desgaste del
dispositivo.
Para este proyecto, nos concentraremos en los actuadores eléctricos, en
concordancia con la tendencia actual en la aviación a sustituir componentes
mecánicos e hidráulicos con componentes eléctricos que requieren menos
mantenimiento y han alcanzado mayor eficiencia, gran robustez y confiabilidad.
Esta tendencia es conocida como More Electric Aircraft.
Los actuadores que consideraremos para el diseño son motores eléctricos de dos
tipos, servomotores, y motores paso a paso.
2.3.1 MOTORES PASO A PASO
A diferencia de los motores de corriente continua de escobillas que giran de
manera continua cuando se les aplica un voltaje, el motor paso a paso tiene la
característica particular es que el eje en la salida del motor puede girar en una
serie de pequeños intervalos angulares predefinidos, también conocidos como
pasos. Los motores paso a paso son atractivos porque pueden ser controlados
directamente por un controlador o una computadora.
El motor PAP gira en función de los pulsos aplicados en sus devanados. Cada
impulso provoca la rotación del eje del rotor en un valor angular preciso. De este
modo, si se conoce el número de pulsos, se puede conocer también la posición
final del motor. Este tipo de motores presenta un sistema de lazo abierto.
Su velocidad está expresada en RPM, y esta varía en función de la tensión
aplicada, la corriente que fluye en el motor, y la carga mecánica a la que está

33
sujeto. Los pasos, o incrementos angulares se miden en grados, y es l parámetro
fundamental de un motor PAP. Son comercializados en una amplia variedad de
grados de rotación por paso, desde .72° hasta 22.5° por paso, que corresponden a
500 y 16 pasos por revolución respectivamente. El motor PAP más popular tiene
pasos de 7.5°.
Existen 3 tipos principales de motores paso a paso, si los clasificamos de acuerdo
a su construcción:
Reluctancia variable. Tiene un rotor multipolar de hierro y un estator
devanado laminado, y rota cuando los dientes del rotor son atraídos a los
dientes del estator electromagnéticamente energizados. La inercia del rotor
de un motor de paso de reluctancia variable es pequeña y la respuesta es
muy rápida, pero la inercia permitida de la carga es pequeña. Cuando los
devanados no están energizados, el par estático de este tipo de motor es
cero
Imán permanente. Permiten mantener un par diferente de cero cuando el
motor no está energizado. Dependiendo de la construcción del motor, es
típicamente posible obtener pasos angulares de 7.5, 11.25, 15, 18, 45 o
90°. El ángulo de rotación se determina por el número de polos en el estator
Híbridos. se caracterizan por tener varios dientes en el estator y en el rotor,
el rotor con un imán concéntrico magnetizado axialmente alrededor de su
eje. Se puede ver que esta configuración es una mezcla de los tipos de
reluctancia variable e imán permanente. Este tipo de motor tiene una alta
precisión y alto par y se puede configurar para suministrar un paso angular
tan pequeño como 1.8°.
En los motores tipo imán permanente, su rotor es un imán que posee una ranura
en toda su longitud y el estator está formado por una serie de bobinas enrolladas
alrededor de un núcleo o polo.
Existen dos tipos principales de motores paso a paso de imán permanente, los
unipolares que se caracterizan por tener varios dientes en el estator y en el rotor,
el rotor con un imán concéntrico magnetizado axialmente alrededor de su eje. Se
puede ver que esta configuración es una mezcla de los tipos de reluctancia
variable e imán permanente. Este tipo de motor tiene una alta precisión y alto par y
se puede configurar para suministrar un paso angular tan pequeño como 1.8°. Y
los bipolares, que tienen generalmente 4 cables de salida, como es necesario el
cambio de dirección del flujo de corriente a través de las bobinas en orden

34
apropiado para poder realizar su movimiento. Se necesita un puente H por cada
motor. En la figura 2.14 podemos observar
Fig.2.14 Esquema de motores paso a paso de imán permanente, unipolar y bipolar.
2.3.2 SERVOMOTORES
Un servomotor, comúnmente abreviado “Servo”, proveniente del latín “Servus” que
significa esclavo, es un sistema motorizado capaz de tomar posiciones
predeterminadas y mantenerlas. En el caso de un motor rotativo, esta posición es
un valor angular, y una distancia (Desplazamiento) en el caso de un motor lineal.
La posición es verificada y corregida continuamente, en función de la medida. Es
un sistema esclavizado, es decir, que es controlado por una señal externa.
Se pueden utilizar motores eléctricos, unidos a sistemas mecánicos o hidráulicos
para obtener una ventaja mecánica. Para llevar a cabo un ajuste preciso de la
posición, el motor está equipado con un sistema de medición que determina la
posición actual del motor, comúnmente esto se logra con la implementación de un
potenciómetro unido al eje del motor. Al existir un desplazamiento angular, el
motor transmitirá el mismo movimiento al potenciómetro, por lo que su resistencia
cambiará en función de la posición.
Esta variación de la resistencia se traduce en un cambio en el voltaje, este voltaje
es comparado con un valor preestablecido para cada posición. Si existe una
desviación, el motor se mueve en la dirección en que se encuentra más cercano el
valor requerido, de modo que la desviación disminuye, hasta llegar al valor
establecido, o bien a un valor dentro de un rango de tolerancia. Este proceso
también puede llevarse a cabo de manera digital.
Existe una amplia gama de servomotores, existen algunos que pueden pesar
varios kilogramos y funcionar con corriente alternativa, con carcasas y engranajes
metálicos, hasta los más pequeños servomotores usados en modelismo, hechos
de materiales plásticos y que funcionan con unos cuantos volts de corriente
directa.

35
Los servomotores más sencillos son controlados por medio de un cable eléctrico
de 3 hilos el cual permite alimentar al motor y transmitir las órdenes de posición en
forma de una señal de PWM. En este tipo de señales, la duración de los impulsos
de la señal de nivel discreto determina el ángulo absoluto al que se debe mover el
eje, la señal se repite periódicamente, generalmente a una frecuencia de 50 Hz, o
un tiempo de 20 ms, lo cual permite el ajuste y mantenimiento de la posición.
Como esta posición es monitoreada y comparada continuamente para encontrar la
diferencia de posición, se dice que es un sistema retroalimentado, conocido
también como sistema de lazo cerrado.
Fig. 2.15 Diagrama a bloques típico de un servomotor.
Virtualmente, cualquier motor eléctrico puede ser utilizado para convertirse en un
servomotor, pero la sección de control requiere cotidianamente una alimentación
regulada en corriente directa por separado, especialmente si la alimentación
eléctrica del sistema utiliza corriente alterna. La potencia de salida continua varia
de unos cuantos watts a quizás 2-3kW, con voltajes de 5, 12, 24, 48 y múltiplos de
50 V como estándar.
Los motores DC están conformados por dos partes principales: el rotor y el
estator.
El rotor es el dispositivo que gira en el centro del motor DC y está compuesto de
arrollados de cable conductores de corriente. Esta corriente es suministrada al
rotor por medio de las "escobillas" generalmente fabricadas de carbón. La fuerza
con la que el motor gira es proporcional a la corriente que hay por los conductores.
A mayor tensión, mayor corriente y mayor par motor.
El estator es la parte inmóvil de la estructura del motor, es el encargado de
suministrar el flujo magnético que será usado por el bobinado del rotor para
realizar el movimiento giratorio pues generalmente es donde se encuentra el imán
permanente, las “escobillas” también se encuentran en esta parte de la estructura.
Otro de los componentes fundamentales del servomotor, es su sistema de
reducción de revoluciones, un engranaje planetario encargado de reducir la

36
velocidad angular a la salida, al mismo que tiempo que otorga una ventaja
mecánica al sistema. A la salida del reductor de velocidad, en el eje de giro
reducido, es donde se debe implementar el sensor de posición. En servomotores
de mayor nivel, se utilizan sensores ópticos como un codificador rotatorio,
Otro de los componentes principales de un servomotor, es el circuito donde se
lleva a cabo la detección del error de posición, es en este circuito donde los
voltajes de referencia, y el que representa la posición actual, son comparados,
para determinar la dirección de giro de motor.
Los módulos para el control de servomotores son hoy en día componentes
industriales estandarizados. Usualmente el diseño está basado en un Puente H.
Que son circuitos electrónicos que permiten que un voltaje se aplique a una carga
en cualquier dirección. Cambiando la polaridad que reciben las terminales del
motor, y de este modo permitiendo que el motor se mueve en ambos sentidos. Los
puentes H están disponibles como circuitos integrados, o bien pueden ser
construidos a partir de componentes electrónicos tradicionales.
2.3.2.1 MODULACIÓN POR ANCHO DE PULSOS.
La modulación por ancho de pulsos (Del inglés Pulse-Width Modulation), es una
técnica de modulación que controla la duración del estado alto de una señal de
pulsos rectangulares, basado en la información contenida en una señal
moduladora. Puede ser usada para transmitir información, aunque su uso principal
se encuentra en el control de la potencia aplicada a dispositivos eléctricos,
comúnmente motores.
En la figura 2.16 podemos observar la forma más sencilla de generar una señal
PWM, conocida como método intersectivo.
Fig 2.16 Generación de señal PWM mediante intersección de señales.

37
El método intersectivo, requiere de una señal de diente de sierra o triangular, que
al ser comparada con la señal de entrada, producirán una señal en estado alto
cuando la señal de entrada sea mayor que la señal de diente de sierra. Por lo que
se producen pulsos en las intersecciones de las señales.
La forma en la que una señal PWM controla un servomotor es sencilla, y está
limitada a indicar la posición en que se debe situar (Los ángulos que debe
moverse). La duración del nivel alto de la señal de pulsos rectangulares es la que
nos indica la posición que el eje del motor debe adoptar.
Cada servomotor tiene sus márgenes de operación, correspondientes a los
valores de ancho de pulso máximo y mínimo que el servo puede entender, estos
valores no deben ser sobrepasados, ya que el servo tiene límites mecánicos que
impiden su movimiento más allá de su margen de operación, este margen es
variable. Existen servomotores que solamente pueden girar en un rango de 180°(
los más habituales), aunque existen modificaciones para que puedan desplazarse
sin límites.
En el caso de un servomotor restringido a 180°, una señal de 1.5 ms corresponde
a la posición central, es decir, a mitad del recorrido angular disponible (90°), una
duración de pulso de .3 ms corresponde a un valor de 0°, y un valor de pulso de
2.5 ms corresponde a 180°, se puede posicionar al servo en cualquier posición
entre los limites superior e inferior, simplemente variando la duración del pulso, la
posición variará 1 grado por cada .01 ms. La relación entre la duración de pulso
alto y ciclo bajo se puede apreciar en la figura 2.17, aun cuando los valores de
ancho de pulso son diferentes, el principio de operación es el mismo.
Fig.2.17 Correlación entre la duración del pulso y la posición del servomotor.

38
Los valores de ancho de pulso son específicos para cada servomotor, y están
especificados en la hoja de datos proporcionada por el fabricante. El periodo entre
pulso y pulso no es tan crítico para operar un servomotor, sin embargo es
recomendable utilizar periodos de 20 ms, o en un rango entre los 10 y los 30 ms.
Duración de pulso [ms] Frecuencia Color de cables
Fabricante 0° 90° 180° [Hz] Positivo Negativo Control
Futaba 0.9 1.5 2.1 50 Rojo Negro Blanco
Hitech 0.9 1.5 2.1 50 Rojo Negro Amarillo
Graupner/Jr 0.8 1.5 2.2 50 Rojo Marrón Naranja
Multiplex 1.05 1.6 2.15 40 Rojo Negro Amarillo
Robbe 0.65 1.3 1.95 50 Rojo Negro Blanco
Simprop 1.2 1.7 2.2 50 Rojo Azul Negro
Tabla 1. Duración de pulso, frecuencia y cableado de diferentes fabricantes
Para que el servo pueda mantener su posición, es indispensable que el sistema de
control siga enviando la señal con pulsos con la misma duración. En caso de que
una fuerza externa intente alterar la posición del servo este intentará resistirse, si
se deja de enviar pulsos, el servomotor dejará de oponer resistencia y cualquier
fuerza externa podría alterar su posición.
3.3.3 COMPARACIÓN ENTRE MOTORES PASO A PASO Y
SERVOMOTORES.
Los motores paso a paso operan generalmente en un sistema de lazo abierto, el
motor recibe órdenes que le indican el movimiento específico que debe realizar.
Bajo algunas circunstancias, los motores paso a paso pueden no reaccionar y
perder pasos, debido a efectos de resonancia o fuerzas inesperadas. Aunque esto
no es común, la posibilidad de que esto pase es una desventaja y disminuye su
confiabilidad. Aunque se puede operar un motor paso a paso con un sistema de
lazo cerrado esto aumenta el costo total del sistema.
La retroalimentación en los servomotores permite que el motor corrija cualquier
discrepancia en la posición.
Cuando un motor paso a paso trabaja a altas velocidades, ve disminuido
drásticamente su torque. Si se aplican configuraciones de micro pasos, el torque
ofrecido puede mejorar, pero mientras su sistema sea de lazo abierto no se
desempeñarán tan bien como los servos. Si consideramos dos dispositivos de
tamaños similares, los servomotores pueden generar velocidades y torques de
entre dos y cuatro veces las ofrecidas por un motor paso a paso

39
Los motores paso a paso son generalmente de imán permanente (Brushless), por
lo que no son propensos al desgaste y requieren poco o ningún mantenimiento.
Los servomotores por su parte, pueden ser construidos con una amplia variedad
de tipos de motores eléctricos, lo que incluye motores de imán permanente, que
requieren poco mantenimiento, sin embargo los servomotores con motores de
escobillas, requieren cambiarlas después de aproximadamente 5000 horas de
uso.
Aun cuando lo motores paso a pueden producir hasta 25 000 micro pasos por
revolución. La posición final no siempre se alcanza, especialmente cuando se ven
sometidos a cargas externas, debido a su naturaleza de sistema de lazo abierto.
La resolución de los servomotores es variable, habiendo codificadores de hasta
10000 pulsos por revolución. Aunado a esto, su sistema de lazo cerrado aumenta
su precisión enormemente.
Los servomotores tienen un ciclo de trabajo, es decir, que sus pulsos de voltaje
alto, se intercalan con pulsos de estado bajo, por lo que su consumo de energía es
bajo, en cambio, los motores paso a paso siempre están energizados, aunque
esto supone una mayor resistencia ante fuerzas externas que intenten desviarlo
de su posición, también representa un elevado consumo de energía constante.
Las principales desventajas de los servomotores, son referentes a su costo, mayor
en comparación con el de los motores paso a paso, la complejidad de los circuitos
y la electrónica de control del mismo, así como la necesidad (O quizás esta pueda
ser una ventaja) de “afinar” o modificar y ajustar continuamente los algoritmos
internos y la electrónica para que el servomotor pueda realizar su objetivo con el
torque, velocidad, precisión más adecuados.

40
CAPÍTULO 3
DESCRIPCION OPERATIVA DEL DISEÑO

41
3.1 Detección de movimiento.
Para llevar a cabo el seguimiento del objetivo, es necesario determinar de algún
modo, la dirección en que el piloto fija su vista. Para este diseño
implementaremos sensores MEMS de dos tipos, acelerómetros y giroscopios. Los
dispositivos MEMS por su tamaño tan reducido, son ideales para situarlos dentro
del casco del piloto.
Para conocer la posición del casco, es necesario contar con la información de dos
desplazamientos angulares, del sistema acimutal, conocidos como cabeceo y
guiñada. (En inglés Pitch y Yaw respectivamente).
3.1.1 Sistema de detección de movimiento de cabeceo.
Para determinar la posición angular conocida como cabeceo, utilizaremos un
sensor ADXL335, con un rango de medida de ±3 g, es ideal para aplicaciones de
detección de inclinación. Este acelerómetro cuenta tres ejes de medición, otorga
estas lecturas a través de 3 salidas analógica, que varían el valor de su voltaje de
acuerdo a la fuerza g actuando sobre ellos. El valor de este voltaje es de 1.5V a
0g, y una sensibilidad de ± 0.3 V / g. Los componentes de la gravedad actuando
en cada eje del dispositivo, se comportan como vectores, y la resultante de estos
vectores es la gravedad. Debido a que la gravedad siempre actúa de forma
perpendicular hacia el suelo, es posible determinar la posición del dispositivo
realizando una operación trigonométrica.
Para conocer la componente de la gravedad en el eje Y, realizamos una operación
de coseno, y para conocer la componente de la gravedad en el eje Z realizamos la
operación Seno. La siguiente tabla (3) contiene los valores de los componentes
de la gravedad para el rango de ángulos posibles en el movimiento de cabeceo del
piloto (±90°). Podemos observar que para la posición de 45° los valores de los
componentes de la gravedad son exactamente iguales.
Pitch Eje Z Eje Y Pitch Eje Z Eje Y
0 1 0 0 1 0
1 0.9998477 0.01745241 -1 0.9998477 -0.01745241
5 0.9961947 0.08715574 -5 0.9961947 -0.08715574
10 0.98480775 0.17364818 -10 0.98480775 -0.17364818
20 0.93969262 0.34202014 -20 0.93969262 -0.34202014
25 0.90630779 0.42261826 -25 0.90630779 -0.42261826
30 0.8660254 0.5 -30 0.8660254 -0.5
35 0.81915204 0.57357644 -35 0.81915204 -0.57357644
40 0.76604444 0.64278761 -40 0.76604444 -0.64278761
45 0.70710678 0.70710678 -45 0.70710678 -0.70710678

42
Pitch Eje Z Eje Y Pitch Eje Z Eje Y
50 0.64278761 0.76604444 -50 0.64278761 -0.76604444
55 0.57357644 0.81915204 -55 0.57357644 -0.81915204
60 0.5 0.8660254 -60 0.5 -0.8660254
65 0.42261826 0.90630779 -65 0.42261826 -0.90630779
70 0.34202014 0.93969262 -70 0.34202014 -0.93969262
75 0.25881905 0.96592583 -75 0.25881905 -0.96592583
80 0.17364818 0.98480775 -80 0.17364818 -0.98480775
85 0.08715574 0.9961947 -85 0.08715574 -0.9961947
90 0 1 -90 0 -1
Tabla 2. Valores de los componentes de la gravedad para diferentes ángulos.
2.1.2 Sistema de detección de movimiento de guiñada.
Para detectar el movimiento de guiñada (Yaw), no podemos utilizar los valores de
los componentes de la gravedad, por lo que se requiere de otro tipo de sensor.
Utilizaremos entonces un giroscopio LYPR540AH, el cual cuenta también con 3
ejes de medición, y 6 salidas analógicas (3 amplificadas, y 3 no amplificadas, 1
para cada eje). Puede medir con precisión hasta ±400°/s si se utilizan sus salidas
amplificadas, con una sensibilidad de 3.2 mV/dps*. La salida del giroscopio en
reposo es de 1.5V, y varía en función de la velocidad de giro.
Si la velocidad fuera constante, entonces bastaría con multiplicar la velocidad por
el tiempo para conocer el desplazamiento angular y actualizar la posición, pero
debido a la condición impredecible de los movimientos de cabeza, se requiere de
otro método para lograrlo.
Recordemos que la velocidad es la primer derivada de la posición, por lo cual, es
necesario integrar la función velocidad para obtener el desplazamiento.
De igual manera, para el movimiento circular, que la velocidad angular es el
cambio del ángulo con respecto al tiempo.
Es necesario realizar una integración numérica, que en su forma más sencilla,
consiste medir la tasa de giro periódicamente, e ir sumando los desplazamientos
obtenidos en cada ciclo de muestreo. La precisión de este método recae
completamente en la frecuencia de muestreo, y mientras más alta sea, sus
lecturas serán más confiables. Un ejemplo de este tipo de aproximación numérica
se muestra en la figura 3.1, como podemos ver se produce un pequeño error se en

43
los valores, por lo cual es necesario calibrar el sistema y reiniciar sus valores
periódicamente. En el caso de nuestro sistema emplearemos una frecuencia de
muestreo de 50 ciclos por segundo, coincidiendo así con el ciclo de generación de
señal PWM.
Fig. 3.1 Ejemplo de la forma más sencilla de integración numérica.
2.2 Adquisición de datos, procesamiento y control de actuadores.
Las operaciones matemáticas, y la interpretación de los valores obtenidos por los
sensores, se llevara a cabo en dos dispositivos micro controlador PIC 16F876A,
cada uno dedicado a la interpretación del movimiento y posición de cada grado de
libertad, esto permite aumentar la precisión, al disminuir el ciclo de lectura de
datos a la mitad. Con este dispositivo se generarán las señales de PWM que
controlarán dos servomotores analógicos para un rango de giro de 180° y se
controlan mediante pulsos a PWM a 50 Hz, con duración de pulso alto de 1.5 a 2.5
ms. Estos servomotores son capaces de mover una plataforma donde se podría
montar fácilmente una cámara pequeña de alta resolución, que envíe su señal a
un HMD, o bien, la señal PWM puede ser utilizada para controlar directamente la
posición de la torreta mediante un servomotor con un motor eléctrico más potente,
como aquellos de 25 v usados comúnmente en otros sistemas de actuadores en el
avión al cual se le instale un sistema de control por PWM. Cualquier motor
eléctrico puede ser convertido en un servomotor, si se diseñan los sistemas de
control pertinentes.

44
CAPÍTULO 4
PROGRAMACIÓN

45
Para llevar a cabo las ideas expuestas en el capítulo anterior, es necesario que las
señales del entorno físico sean medidas e interpretadas por una unidad de control,
esta función recae en el dispositivo micro controlador PIC 16F876A, el cual
requiere ser programado para poder llevar a cabo la adquisición de los datos, y el
procesamiento de las señales que controlarán el sistema.
Los dispositivos PIC se programan en lenguaje ensamblador, pero mediante el
compilador PIC C podemos programar el dispositivo utilizando un dialecto del
lenguaje C desarrollado para facilitar la programación de estos dispositivos.
Cuando se compila el código, se genera un archivo con extensión (.Hex), este
archivo es el código ensamblador equivalente, además incluye librerías y
controladores necesarios para la manipulación de los puertos del micro
controlador y dispositivos periféricos cómo son pantallas LCD matriciales o de
caracteres. Cómo se utilizarán dos dispositivos micro controladores, se
desarrollarán 2 programas diferentes, el primero corresponde al movimiento de
cabeceo (“pitch”) y el segundo corresponde al movimiento de guiñada (Yaw).
4.1 Eje de Altitud, movimiento de Cabeceo.
El cabeceo es el movimiento que altera la altitud de un objeto, está definido como
el giro de un cuerpo sobre el eje lateral (X), cuando se realiza idealmente, es decir
sin movimiento de ladeo, el cabeceo involucra solamente un cambio en las
lecturas de gravedad en los ejes “Z” y “Y”. El voltaje de salida del sensor a nivel 0g
es 1.5 V y su sensibilidad es de .3v/ ±1 g Por lo que la relación de los voltajes
representa la posición del dispositivo. Este movimiento representa la inclinación de
la cabeza del piloto hacia arriba o hacia abajo.
4.1.1 Determinación de posición.
A continuación se presenta el código de programación en lenguaje C, y se
describe la función que tiene cada comando.
Programa 1
#include <16F876A.h> // Incluye la librería de los controladores del dispositivo. #device adc=10 // Designa el tamaño del convertidor AC a 10 bits de resolución #FUSES XT,NOWDT //Implementa un oscilador de cristal, y el “perro guardián” #use delay(clock=4000000) //Establece la frecuencia del cristal de oscilación a 4.0MHz #include <math.h> //Incluye la librería en la que se encuentran los códigos para
realizar operaciones matemáticas #include <lcd.c> //Incluye el programa que hace posible controlar un display LCD void main() //Función principal {

46
float xvolt,yvolt,zvolt,xacel,yacel,zacel,pitch,P; //Etablece las variables que se utilizarán en el programa, el tipo flotante permite utilizar números enteros o con punto decimal de hasta 16 bits
delay_ms(50); //Establece un retraso de 50 ms while (true) //Crea un ciclo infinito { setup_adc_ports(ALL_ANALOG); //Establece todos los puertos como análogos setup_adc(ADC_CLOCK_INTERNAL); //Establece el reloj lcd_init(); //Inicializa la pantalla LCD set_adc_channel(0); //Habilita el canal 0 del puerto A delay_us(20); //Retraso de 20 micro segundos zvolt=read_adc(); //adquiere el valor del canal 1, representa el
voltaje del eje Z zacel=((zvolt-307)/61); //Mediante este logaritmo se transforma el valor
digital del voltaje en fuerzas g delay_ms(100); //Retraso 100 microsegundos set_adc_channel(2); //Habilita el canal 2 delay_us(20); //Retraso 20 microsegundos xvolt=read_adc(); //Adquiere el valor del canal 2 representa el
voltaje del eje X xacel=((xvolt-307)/61); //Convierte el valor digital del voltaje en fuerzas g set_adc_channel(1); delay_us(20); yvolt=read_adc(); yacel=((yvolt-307)/61); printf(lcd_putc, "\f az= %f ay= %f",zacel,yacel); //Muestra los valores de la aceleración en cada eje
a través del display LCD.
P=sqrt(yacel*yacel+xacel*xacel+zacel*zacel); //Operación matemática que crea la resultante de los vectores de aceleración en cada eje.
if (yacel<0) //Condiciona el flujo del programa, realiza su función si el valor de la
aceleración en Y es negativo { pitch=(-1)*(360*acos(zacel/p))/(2*3.141592); //Establece la posición del dispositivo
comparando la aceleración en z, con la resultante de la gravedad, convierte el valor de radianes a grados.
printf(lcd_putc, "\n pitch = %f",pitch); //Muestra en pantalla el valor del ángulo de cabeceo. delay_ms(1000); } else if (yacel>=0) //Condiciona el flujo del programa, realiza la operación para cualquier
valor de aceleración en y mayor o igual a 0. { pitch=(360*acos(zacel/p))/(2*3.141592);

47
printf(lcd_putc, "\n pitch = %f",pitch); delay_ms(1000); } } }
Este programa solo sirve para obtener y representar los valores de la posición en
la pantalla LCD y se usará durante la simulación, el programa que se emplea en el
micro controlador montado en el casco del piloto, no requiere de pantalla propia,
por lo que se reduce su tamaño. El tiempo de duración del ciclo de adquisición de
datos se reduce drásticamente al no incluir los retrasos necesarios para presentar
la posición en la pantalla.
4.1.2 Control del servomotor.
El código empleado en el micro controlador debe incluir una función encargada de
generar la señal PWM, esto se logró creando una función cíclica que cambia el
tiempo alto de la señal de salida del puerto C0. El código utilizado es el siguiente.
Programa 2
#include <16F876A.h> #device adc=10 #FUSES XT,NOWDT #use delay(clock=4000000) #include <math.h> //Se incluyen las mismas cabeceras, a excepción del controlador del display
LCD. void posicion (float i) //Se crea una función llamada posición, la cual recibe el valor del pitch al
final del programa, en una variable flotante llamada i. { int32 h; int j; //se declaran dos variables, entero de 32 bits h, que representará el tiempo
de periodo alto, y entero j, que creará ciclos para producir la señal PWM h=2000+(i*(50/9)); //El valor de posición 0° corresponde a 2000ms, por lo que, si convertimos
la desviación angular a su equivalente en microsegundos y lo añadimos, producirán el tiempo de estado alto necesario para mover el servomotor al ángulo requerido.
for(j=0;j<5;j++) //Contador, genera 5 ciclos de señal PWM. { OUTPUT_HIGH(PIN_C0); //Establece la salida del pin C0 a estado alto. delay_us(h); //Mantiene la señal del pin C0 en estado alto por el valor de la variable h. OUTPUT_LOW(PIN_C0);// Establece la salida del pin CO en estado bajo

48
delay_us(20000-h); //Debido a que la frecuencia de pulsos de trabajo del servomotor es de 50Hz, el ciclo de trabajo debe ser de aproximadamente 20ms, si restamos la variable h a este número, obtenemos el retraso necesario obtener la frecuencia de trabajo.
} } void main() //La función main, permanece casi igual, solamente se reducen los tiempos
de retraso, y se eliminan las líneas de código que controlaban el display LCD.
{ float xvolt,yvolt,zvolt,xacel,yacel,zacel,pitch,R; while (true) { setup_adc_ports(ALL_ANALOG); setup_adc(ADC_CLOCK_INTERNAL); set_adc_channel(0); delay_us(20); zvolt=read_adc(); zacel=((zvolt-307)/61); set_adc_channel(2); delay_us(20); xvolt=read_adc(); xacel=((xvolt-307)/61); set_adc_channel(1); delay_us(20); yvolt=read_adc(); yacel=((yvolt-307)/61); R=sqrt(yacel*yacel+xacel*xacel+zacel*zacel); if (yacel<0) { pitch=(-1)*(360*acos(zacel/R))/(2*3.141592); } else if (yacel>=0) { pitch=(360*acos(zacel/R))/(2*3.141592); } posicion(pitch); // Esta línea de código toma el valor de la variable pitch y lo introduce en la
función posicion, situada al principio del código, por lo que se reinicia el programa y el ciclo vuelve a comenzar de manera ininterrumpida.
} }

49
4.2 Eje Azimut movimiento de guiñada.
El movimiento de guiñada es un movimiento giratorio alrededor del eje vertical (Z),
este movimiento, representa el giro de la cabeza de un lado al otro. El rango
aproximado del movimiento son 180°.
4.1.1 Determinación de posición y control del servomotor
La manera en que se actualiza la posición es multiplicando la velocidad medida en
el giroscopio, por un diminuto intervalo de tiempo. La sección dedicada a generar
la señal PWM se encuentra dentro de la función main, lo cual permite que su ciclo
de operación sea continuo, por lo que el ancho de los pulsos y la posición del
servo varían en tiempo real con la señal de entrada. Es más mucho más eficiente
no incluir display LCD, debido a que no requiere tiempos de espera para manipular
el LCD. Este es el código final que se graba en el dispositivo micro controlador PIC
18F876A.
Programa 3
#include <16F876A.h> //Incluye la librería del dispositivo #device adc=10 //Define el tamaño del convertidor AD a 10 bits de resolución #FUSES XT,NOWDT //Establece un oscilador de cristal y el perro guardían #use delay(clock=4000000) // Establece la frecuencia de oscilación a 4.0MHz. #include <math.h> //Incluye la librería matemática. #include <lcd.c> //Incluye el programa que permite interactuar con una
pantalla LCD.
void main() //Función principal. { float vgiro,volt,volrel,rate,pos,ang; // Variables flotantes. int32 h; //Variable entera de 32 bits. while(true) //Crea ciclo infinito. { setup_adc_ports(ALL_ANALOG); //Establece todos los puertos como analógicos setup_adc(ADC_CLOCK_INTERNAL); //Establece el reloj interno set_adc_channel(0); //Establece el canal A0 delay_us(20); vgiro=read_adc(); volt=vgiro*(.0049); volrel=(volt-1.5); rate=volrel/.0032;

50
if(rate>1.35) // Establece el algoritmo a seguir para valores de más de 1.35 dps. Esto crea un nivel de activación que es vital para evitar la deriva del giroscopio.
{ ang=rate*.02; pos=pos+ang; h=2000+(pos*(50/9)); //En esta sección se lleva a cabo la generación de la señal OUTPUT_HIGH(PIN_C0); //PWM, el ciclo es continuo por lo que el ancho de los pulsos delay_us(h); //y la posición de los servomotores cambiará en tiempo real. OUTPUT_LOW(PIN_C0); delay_us(18000-h); } else if(rate<-1.35) //Condiciona la señal, solo acepta valores negativos menores
//a -1.35 { ang=rate*.02; pos=pos+ang; h=2000+(pos*(50/9)); OUTPUT_HIGH(PIN_C0); delay_us(h); OUTPUT_LOW(PIN_C0); delay_us(18000-h); } else if(rate>=-1.35&&rate<=1.35) //Mantiene la posición estacionaria, y evita estabiliza
el //sistema ante perturbaciones minúsculas. { h=2000+(pos*(50/9)); OUTPUT_HIGH(PIN_C0); delay_us(h); OUTPUT_LOW(PIN_C0); delay_us(18000-h); }}}

51
CAPÍTULO 5
SIMULACIÓN.

52
Para poder comprobar el comportamiento del sistema, es necesario realizar
pruebas al los programas desarrollados. La construcción y reprogramación de un
dispositivo sería necesaria de no ser por los simuladores electrónicos por
computadora, al utilizar el software ISIS Proteus podemos hacer ajustes en un
tiempo mínimo, y simular los sistemas de una manera bastante precisa.
Dentro de este programa cargaremos el código ensamblador en un micro
controlador virtual al cual le aplicaremos diferentes combinaciones de voltajes en
los puertos de los sensores, simulando de esta manera el comportamiento de
estos en el mundo real.
5.1 Simulación del sistema de seguimiento del movimiento de
cabeceo.
Utilizamos el primer programa que desarrollamos para poder observar los cambios
en la posición expresada en el display LCD. En la figura 5.1 se muestra la
estructura y los componentes del circuito del sistema diseñado y simulado en el
software Proteus.
Fig.5.1 Circuito equivalente para medición de cabeceo.
En el diseño tenemos al componente principal del sistema que es el micro
controlador PIC 16F876A, una pantalla LCD donde se mostrarán los valores de la
inclinación. Para simular el comportamiento de los sensores, se han colocado tres
baterías independientes, las cuales suministran un voltaje de acuerdo con los
valores típicos del acelerómetro ADXL335 en diferentes ángulos de inclinación.

53
Los voltajes típicos a la salida de cada eje del acelerómetro se pueden apreciar en
la siguiente tabla.
Pitch Voltaje Z Voltaje Y Pitch Voltaje Z Voltaje Y
0 1.8 1.5 0 1.8 1.5
1 1.79995431 1.50523572 -1 1.79995431 1.49476428
5 1.79885841 1.52614672 -5 1.79885841 1.47385328
10 1.79544233 1.55209445 -10 1.79544233 1.44790555
15 1.78977775 1.57764571 -15 1.78977775 1.42235429
20 1.78190779 1.60260604 -20 1.78190779 1.39739396
25 1.77189234 1.62678548 -25 1.77189234 1.37321452
30 1.75980762 1.65 -30 1.75980762 1.35
35 1.74574561 1.67207293 -35 1.74574561 1.32792707
40 1.72981333 1.69283628 -40 1.72981333 1.30716372
45 1.71213203 1.71213203 -45 1.71213203 1.28786797
50 1.69283628 1.72981333 -50 1.69283628 1.27018667
55 1.67207293 1.74574561 -55 1.67207293 1.25425439
60 1.65 1.75980762 -60 1.65 1.24019238
65 1.62678548 1.77189234 -65 1.62678548 1.22810766
70 1.60260604 1.78190779 -70 1.60260604 1.21809221
75 1.57764571 1.78977775 -75 1.57764571 1.21022225
80 1.55209445 1.79544233 -80 1.55209445 1.20455767
85 1.52614672 1.79885841 -85 1.52614672 1.20114159
90 1.5 1.8 -90 1.5 1.2
Tabla 3. Voltaje a la salida del acelerómetro para diferentes inclinaciones.
El voltaje varía en razón de la gravedad y no directamente del ángulo. La razón
por la cual el voltaje en Z para ángulos negativos y para ángulos positivos es el
mismo, radica en el hecho de que su posición natural es horizontal, si se 90
grados en cualquier dirección quedará completamente de lado, y su medición será
de 0g. A 0g el voltaje a la salida del acelerómetro es 1.5, y a 1g es de 1.8.
Se seleccionaron 5 casos representativos para simularlos, en Proteus, la condición
inicial 0°, la condición totalmente hacia arriba 90° y a la mitad de ese recorrido 45°,
así como la posición completamente hacia abajo y posición a la mitad de ese
recorrido.
Al ajustar el voltaje de las baterías que alimentan las entradas del puerto A del pic,
observaremos los valores calculados de la gravedad en el display LCD, y los
compararemos con los valores esperados. El voltaje en el eje X permanece

54
constante a 1.5 V que representan un valor de 0g, pues el cambio de este genera
otro movimiento conocido como Roll.
5.1.1 Condición inicial inclinación de 0°
Para la condición inicial de 0°, tenemos que:
Vz=1 Vy=1.5
aZ=1 aZ=0
Introducimos los valores de voltaje y comparamos los resultados con la
simulación.
Fig. 5.2 Resultados simulación cálculo de posición.
Podemos comprobar en la imagen del display que los valores de la aceleración en
los ejes Z y Y son correctos, así como el ángulo de cabeceo.
La siguiente parte de la simulación corresponde a verificar la señal PWM y que el
servomotor simulado se mueva a la posición deseada.
Introducimos los mismos valores al mismo circuito, pero con el programa 2
cargado en el microcontrolador.

55
Fig 5.3 Señal PWM para pitch 0°
Para obtener una altitud de 0°, es necesario que el servomotor se sitúe a la mitad de su
recorrido, por lo cual se requiere una señal de pulsos con un ancho de 2ms, y una
frecuencia de aproximadamente 50Hz, si observamos con detenimiento la figura 5.3
podemos observar que la frecuencia es correcta, la escala horizontal de esta imagen es
de 5ms. En la figura 5.4 observamos el ancho de pulso, con una escala horizontal de 1ms.
Observamos que también se cumple el ancho de pulso requerido por el servomotor.
Fig. 5.4 ancho de pulso para pitch 0°
En la figura 5.5 podemos observar la posición de servomotor simulado, el servomotor
tiene 180° de libertad, por lo que para situarse a la mitad de ese rango debe moverse 90°,
observamos que la posición es suficientemente cercana a la posición deseada para el
sistema.
Fig. 5.5 Posición del servo para pitch 0°

56
5.1.2 Condición pitch 90°
Para la condición inicial de 90°, tenemos que:
Vz=1.5 Vy=1.8
aZ=0 aZ=1
Introducimos los valores de voltaje y comparamos los resultados con la
simulación.
Fig. 5.6 Resultados simulación cálculo de posición pitch 90°
Podemos comprobar en la imagen del display que los valores de la aceleración en
los ejes Z y Y son correctos, así como el ángulo de cabeceo.
La siguiente parte de la simulación corresponde a verificar la señal PWM y que el
servomotor simulado se mueva a la posición deseada.
Introducimos los mismos valores al mismo circuito, pero con el programa 2
cargado en el microcontrolador.
Fig 5.7 Señal PWM para pitch 90°

57
Para obtener una altitud de 90°, es necesario que el servomotor realice por completo su
recorrido, por lo cual se requiere una señal de pulsos con un ancho de 2.5ms, y una
frecuencia de aproximadamente 50Hz, si observamos con detenimiento la figura 5.7
podemos observar que la frecuencia es correcta, la escala horizontal de esta imagen es
de 5ms. En la figura 5.8 observamos el ancho de pulso, con una escala horizontal de 1ms.
Observamos que también se cumple el ancho de pulso requerido por el servomotor.
Fig. 5.8 ancho de pulso para pitch 90°
En la figura 5.9 podemos observar la posición de servomotor simulado, el servomotor
tiene 180° de libertad, por lo que para situarse al final de ese rango debe moverse 180°,
observamos que la posición es exactamente la deseada.
Fig. 5.9 Posición del servo para pitch 90°
5.1.3 Condición pitch 45°
Para la condición inicial de 90°, tenemos que:
Vz=1.71213 Vy=1.71213
aZ=0.7071678 aZ=0.7071678
Introducimos los valores de voltaje y comparamos los resultados con la
simulación.

58
Fig. 5.10 Resultados simulación cálculo de posición pitch 45°
Podemos comprobar en la imagen del display que los valores de la aceleración en
los ejes Z y Y son correctos, así como el ángulo de cabeceo.
La siguiente parte de la simulación corresponde a verificar la señal PWM y que el
servomotor simulado se mueva a la posición deseada.
Introducimos los mismos valores al mismo circuito, pero con el programa 2
cargado en el micro controlador.
Fig 5.11 Señal PWM para pitch 45°
Para obtener una altitud de 45°, es necesario que el servomotor realice ¾ partes de su
recorrido, por lo cual se requiere una señal de pulsos con un ancho de 2.25 ms, y una
frecuencia de aproximadamente 50Hz, si observamos con detenimiento la figura 5.11
podemos observar que la frecuencia es correcta, la escala horizontal de esta imagen es
de 5ms. En la figura 5.8 observamos el ancho de pulso, con una escala horizontal de .5
ms. Observamos que también se cumple el ancho de pulso requerido por el servomotor.
Fig. 5.12 ancho de pulso para pitch 45°

59
En la figura 5.12 podemos observar la posición de servomotor simulado, el servomotor
tiene 180° de libertad, por lo que para situarse al final de ese rango debe moverse 135°,
observamos que la posición es exactamente la deseada.
Fig. 5.13 Posición del servo para pitch 45°
5.1.4 Condición pitch -45°
Para la condición inicial de 90°, tenemos que:
Vz=1.71213 Vy=1.28786
aZ=0.7071678 aZ=- 0.7071678
Introducimos los valores de voltaje y comparamos los resultados con la
simulación.
Fig. 5.14 Resultados simulación cálculo de posición pitch -45°
Podemos comprobar en la imagen del display que los valores de la aceleración en
los ejes Z y Y son correctos, así como el ángulo de cabeceo.
La siguiente parte de la simulación corresponde a verificar la señal PWM y que el
servomotor simulado se mueva a la posición deseada.

60
Introducimos los mismos valores al mismo circuito, pero con el programa 2
cargado en el micro controlador.
Fig 5.15 Señal PWM para pitch -45°
Para obtener una altitud de -45°, es necesario que el servomotor realice 1/4 parte de su
recorrido, por lo cual se requiere una señal de pulsos con un ancho de 1.75 ms, y una
frecuencia de aproximadamente 50Hz, si observamos con detenimiento la figura 5.16
podemos observar que la frecuencia es correcta, la escala horizontal de esta imagen es
de 5ms. En la figura 5.8 observamos el ancho de pulso, con una escala horizontal de .5
ms. Observamos que también se cumple el ancho de pulso requerido por el servomotor.
Fig. 5.16 ancho de pulso para pitch -45°
En la figura 5.12 podemos observar la posición de servomotor simulado, el servomotor
tiene 180° de libertad, por lo que para situarse al final de ese rango debe moverse 45°,
observamos que la posición es muy cercana la deseada con un error de solamente 0.3°.
Fig. 5.17 Posición del servo para pitch -45°

61
5.1.5 Condición pitch -90°
Para la condición inicial de 90°, tenemos que:
Vz=1.5 Vy=1.2
aZ=0 aZ=-1
Introducimos los valores de voltaje y comparamos los resultados con la
simulación.
Fig. 5.18 Resultados simulación cálculo de posición pitch -90°
Podemos comprobar en la imagen del display que los valores de la aceleración en
los ejes Z y Y son correctos, así como el ángulo de cabeceo.
La siguiente parte de la simulación corresponde a verificar la señal PWM y que el
servomotor simulado se mueva a la posición deseada.
Introducimos los mismos valores al mismo circuito, pero con el programa 2
cargado en el micro controlador.
Fig 5.19 Señal PWM para pitch -90°
Para obtener una altitud de -90°, es necesario que el servomotor se conserve la posición
donde comienza su recorrido, por lo cual se requiere una señal de pulsos con un ancho
de 1.5 ms, y una frecuencia de aproximadamente 50Hz, si observamos con detenimiento
la figura 5.19 podemos observar que la frecuencia es correcta, la escala horizontal de esta
imagen es de 5ms. En la figura 5.20 observamos el ancho de pulso, con una escala
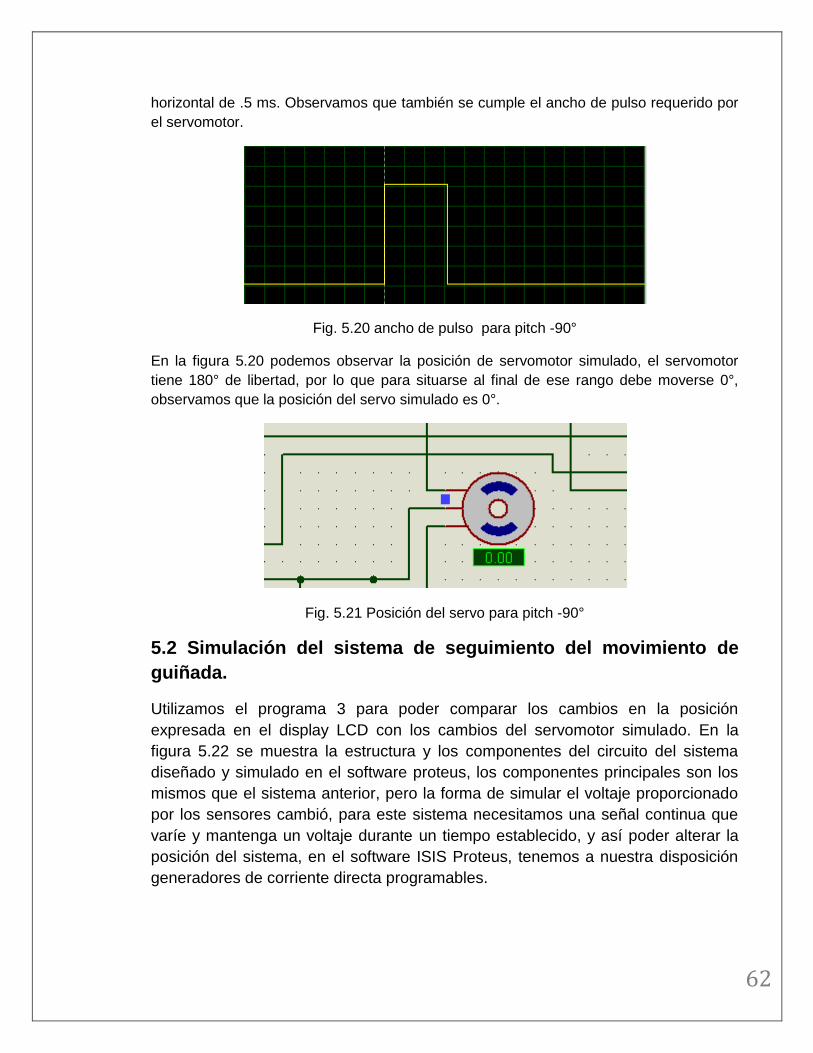
62
horizontal de .5 ms. Observamos que también se cumple el ancho de pulso requerido por
el servomotor.
Fig. 5.20 ancho de pulso para pitch -90°
En la figura 5.20 podemos observar la posición de servomotor simulado, el servomotor
tiene 180° de libertad, por lo que para situarse al final de ese rango debe moverse 0°,
observamos que la posición del servo simulado es 0°.
Fig. 5.21 Posición del servo para pitch -90°
5.2 Simulación del sistema de seguimiento del movimiento de
guiñada.
Utilizamos el programa 3 para poder comparar los cambios en la posición
expresada en el display LCD con los cambios del servomotor simulado. En la
figura 5.22 se muestra la estructura y los componentes del circuito del sistema
diseñado y simulado en el software proteus, los componentes principales son los
mismos que el sistema anterior, pero la forma de simular el voltaje proporcionado
por los sensores cambió, para este sistema necesitamos una señal continua que
varíe y mantenga un voltaje durante un tiempo establecido, y así poder alterar la
posición del sistema, en el software ISIS Proteus, tenemos a nuestra disposición
generadores de corriente directa programables.

63
5.2.1 simulación programada
Fig.5.22 Circuito equivalente para la simulación del movimiento en Azimut.
En la figura 5.23 podemos observar una gráfica de tiempo / voltaje, esta gráfica
puede controlar una señal continua colocando puntos que alteran la su valor y
dirección.
Fig. 5.23 Señal programada para simular el movimiento de cabeza.
Utilizaremos esta señal para simular el movimiento de cabeza, recordemos que el
giroscopio elegido tiene un voltaje neutral de 1.5 V, por lo cual una señal de 1.5V
continuos no debe afectar la posición del sistema, mientras más lejos se encuentre
un punto de la línea horizontal de 1.5 v, la velocidad angular de la simulación será
más grande.
La tabla 5 muestra los valores de voltaje para algunas velocidades angulares.

64
dps Voltaje dps Voltaje
400 2.8 -400 0.2
300 2.475 -300 0.525
200 2.15 -200 0.85
180 2.085 -180 0.915
120 1.89 -120 1.11
100 1.825 -100 1.175
90 1.7925 -90 1.2075
60 1.695 -60 1.305
45 1.64625 -45 1.35375
30 1.5975 -30 1.4025
20 1.565 -20 1.435
10 1.5325 -10 1.4675
5 1.51625 -5 1.48375
3 1.50975 -3 1.49025 Tabla 4. Voltaje de algunas velocidades angulares.
Iniciamos la simulación con una señal continua de 1.5 V, correspondientes a una
velocidad angular nula, es decir, la posición angular Yaw debe permanecer en 0°,
y la posición del servo debe mantenerse en el punto medio, lo que significa que el
ancho de los pulsos de la señal PWM debe ser muy cercano a los 2.0 ms. En la
figura 5.24 podemos observar la respuesta del sistema a la condición inicial,
podemos apreciar que se cumplen los requerimientos de respuesta ante la señal
inicial.
Fig. 5.24 Respuesta al voltaje inicial de 1.5 v.
Para simular el movimiento de en Azimut de la cabeza, primero enviaremos una
señal de velocidad de 30°/s durante un segundo, si el tiempo de muestreo utilizado
en la aproximación numérica está sincronizado con el tiempo del ciclo del
programa completo, entonces el valor del ángulo al final de este pulso, deberá ser
un valor de aproximadamente 120°.
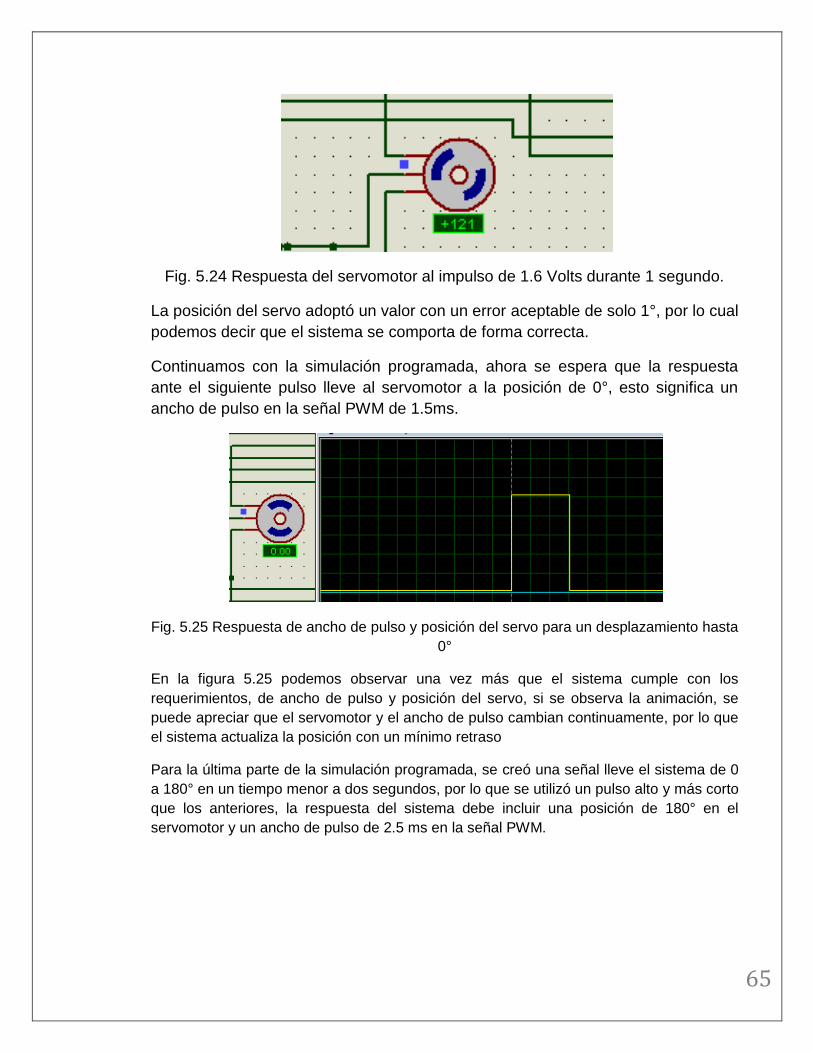
65
Fig. 5.24 Respuesta del servomotor al impulso de 1.6 Volts durante 1 segundo.
La posición del servo adoptó un valor con un error aceptable de solo 1°, por lo cual
podemos decir que el sistema se comporta de forma correcta.
Continuamos con la simulación programada, ahora se espera que la respuesta
ante el siguiente pulso lleve al servomotor a la posición de 0°, esto significa un
ancho de pulso en la señal PWM de 1.5ms.
Fig. 5.25 Respuesta de ancho de pulso y posición del servo para un desplazamiento hasta
0°
En la figura 5.25 podemos observar una vez más que el sistema cumple con los
requerimientos, de ancho de pulso y posición del servo, si se observa la animación, se
puede apreciar que el servomotor y el ancho de pulso cambian continuamente, por lo que
el sistema actualiza la posición con un mínimo retraso
Para la última parte de la simulación programada, se creó una señal lleve el sistema de 0
a 180° en un tiempo menor a dos segundos, por lo que se utilizó un pulso alto y más corto
que los anteriores, la respuesta del sistema debe incluir una posición de 180° en el
servomotor y un ancho de pulso de 2.5 ms en la señal PWM.

66
Figura 5.26 Ancho de pulso para posición 180°
En la figura 5.26 podemos observar que el ancho de pulso de la señal PWM generada es
de aproximadamente 2.5ms, correspondiendo con la posición del servo simulado a 180°.

67
CONCLUSIONES
Esta tesina comprueba que se pueden utilizar sensores MEMS para facilitar la
interacción humano-máquina, sin embargo, me parece que un sistema con la
precisión que tienen los sistemas de armamento militar requiere de más
investigación y sobre todo de la construcción y realización de pruebas físicas en
un prototipo.
Una de las partes más interesantes de desarrollar el código fue la parte que se
encargaba de controlar la señal PWM y al mismo tiempo hacer el cálculo de la
posición, ambos procesos interferían el uno con el otro por lo que el tiempo del
procesamiento de la información debía tomarse en cuenta para establecer el
intervalo de la aproximación numérica, e incluirlo en el tiempo de estado bajo de la
señal.
Al haber desarrollado el código y la simulación de este proyecto, se tomaron en
cuenta situaciones ideales, que no representan completamente los desperfectos y
errores inherentes de la interacción con mundo real.
Me queda claro que los dispositivos MEMS son una herramienta muy poderosa, y
que tienen el potencial de ser utilizado en aplicaciones innovadoras por personas
creativas.

68
REFERENCIAS
[1] Organización de Aviación Civil Internacional (julio de 2006 (décima
edición)). «1. Definiciones y reglamento general relativo al otorgamiento de
licencias. Punto 1.1.- Definiciones».
[2 ] Aircraft, Wikipedia en Inglés.
[3 ] Aerial Warfare, Wikipedia en Inglés.
[4] Flightglobal en internet
http://www.flightglobal.com/FlightPDFArchive/1910/1910%20-%200863.PDF
[5] Gunston, Bill (1986). Jane's Aerospace Dictionary. London, England: Jane's
Publishing Company Limited. ISBN 0-7106-0365-7.
[6] Murphy, Justin (2005). Weapons and Warfare: Military Aircraft, Origins to
1918. ABC Clio. pp. 53–54. ISBN 1-85109-488-1.
[7] G. van Wyngarden. Early German Aces of World War 1. Osprey Publishing,
2006. ISBN 1-84176-997-5
[8] Doscher, James. "Accelerometer Design and Applications". 2008.
[9] MEMSIC thermal accelerometer MXC 6226XC Whitepaper, SENSOR
Magazine 2012.
[10] Electric Motors and Drives, Fundamentals, types and Applications, Austin
Hughes
BIBLIOGRAFÍA
Electric Motors and Drives, Fundamentals, types and Applications, Austin Hughes
Compilador C CCS y simulador PROTEUS para micro controladores PIC, Eduardo
García Brejio.
Manual de usuario del compilador PCW de CCS. Andrés Cánovas López.
Palacios Municio, Enrique. Micro controlador PIC16F84. Desarrollo de
proyectos. 2ª ed. México: Alfa-Omega 2006.
















![Aerodinámica y Mecánica del Vuelo [EM] Vers1](https://static.fdocumentos.tips/doc/165x107/55cf9c12550346d033a87d8b/aerodinamica-y-mecanica-del-vuelo-em-vers1.jpg)

