Dinâmica
16
Dinâmica O termo dinâmica é provindo do grego dynamike, significa "forte". Em física, a dinâmica é um ramo da mecânica que estuda o movimento de um corpo e as causas desse movimento. Em experiências diárias podemos observar o movimento de um corpo a partir da interação deste com um (ou mais) corpo(s). Como por exemplo, quando um jogador de tênis dá uma raquetada numa bola, a raquete interage com ela e modifica o seu movimento. Quando soltamos algum objeto a uma certa altura do solo e ele cai, é resultado da interação da terra com este objeto. Esta interação é convenientemente descrita por um conceito chamado força. Os Princípios de dinâmica foram formulados por Galileu e Newton, porém foi Newton que os enunciou da forma que conhecemos hoje Força Força é um dos conceitos fundamentais da Física newtoniana. Relacionado com as três leis de Newton, é uma grandeza que tem a capacidade de vencer a inércia de um corpo, modificando-lhe a velocidade (seja na sua magnitude[desambiguação necessária] ou direção, já que se trata de um vetor). Como corolário, chega-se ao constructo de que a força pode causar deformação em um objeto flexívelCitação: Força: qualquer agente externo que modifica o movimento de um corpo livre ou causa deformação num corpo fixo1 . Intuitivamente, a força se identifica com as noções de empuxo ou impuxo. A força, por ser também um vetor, tem dois elementos: a magnitude e a direção. A segunda lei de Newton, ("F=ma"), foi originalmente formulada em termos ligeiramente diferentes, mas equivalentes: a versão original afirma que a força que age sobre um objeto é igual à derivada temporal do momento linear deste objeto2 .Alguns conceitos relacionados com a força:pressão, divisão ou distribuição da força sobre a área;
-
Upload
gabriel-lima -
Category
Documents
-
view
684 -
download
1
Transcript of Dinâmica

Dinâmica
O termo dinâmica é provindo do grego dynamike, significa "forte". Em física,
a dinâmica é um ramo da mecânica que estuda o movimento de um corpo e
as causas desse movimento.
Em experiências diárias podemos observar o movimento de um corpo a partir
da interação deste com um (ou mais) corpo(s). Como por exemplo, quando
um jogador de tênis dá uma raquetada numa bola, a raquete interage com
ela e modifica o seu movimento. Quando soltamos algum objeto a uma certa
altura do solo e ele cai, é resultado da interação da terra com este objeto.
Esta interação é convenientemente descrita por um conceito chamado força.
Os Princípios de dinâmica foram formulados por Galileu e Newton, porém foi
Newton que os enunciou da forma que conhecemos hoje
Força
Força é um dos conceitos fundamentais da Física newtoniana. Relacionado
com as três leis de Newton, é uma grandeza que tem a capacidade de vencer
a inércia de um corpo, modificando-lhe a velocidade (seja na sua
magnitude[desambiguação necessária] ou direção, já que se trata de um
vetor). Como corolário, chega-se ao constructo de que a força pode causar
deformação em um objeto flexívelCitação: Força: qualquer agente externo
que modifica o movimento de um corpo livre ou causa deformação num
corpo fixo1 . Intuitivamente, a força se identifica com as noções de empuxo
ou impuxo. A força, por ser também um vetor, tem dois elementos: a
magnitude e a direção. A segunda lei de Newton, ("F=ma"), foi originalmente
formulada em termos ligeiramente diferentes, mas equivalentes: a versão
original afirma que a força que age sobre um objeto é igual à derivada
temporal do momento linear deste objeto2 .Alguns conceitos relacionados
com a força:pressão, divisão ou distribuição da força sobre a área;

arrasto, diminuição da velocidade de um objeto;
torque, força que produz mudanças na velocidade de rotação de um objeto.
A força aplicada num corpo fixo é chamada tensão mecânica ou estresse
mecânico, um termo técnico para as influências que causam deformação da
matéria. Enquanto o estresse mecânico pode permanecer incorporado em
um objeto sólido, gradualmente, deformá-lo, estresse mecânico em um
fluido determina mudanças em sua pressão e volume 3 ,4 e 5 .
1º Lei de Newton
Lei I: Todo corpo continua em seu estado de repouso ou de movimento
uniforme em uma linha reta, a menos que seja forçado a mudar aquele
estado por forças aplicadas sobreele.2
Conhecida como princípio da inércia,3 a primeira lei de Newton afirma que:
se a força resultante (o vetor soma de todas as forças que agem em um
objeto) é nula, logo a velocidade do objeto é constante.
Consequentemente:
Um objeto que está em repouso ficará em repouso a não ser que uma força
resultante aja sobre ele.
Um objeto que está em movimento não mudará a sua velocidade a não ser
que uma força resultante aja sobre ele.
Newton apresentou a primeira lei a fim de estabelecer um referencial para as
leis seguintes. A primeira lei postula a existência de pelo menos um
referencial, chamado referencial newtoniano ou inercial, relativo ao qual o
movimento de uma partícula não submetida a forças é descrito por uma
velocidade (vetorial) constante.4 5
“ Em todo universo material, o movimento de uma partícula em um sistema
de referência preferencial Φ é determinado pela ação de forças as quais
foram varridas de todos os tempos quando e somente quando a velocidade

da partícula é constante em Φ. O que significa, uma partícula inicialmente em
repouso ou em movimento uniforme no sistema de referência preferencial Φ
continua nesse estado a não ser que compelido por forças a mudá-lo.6 ”
As leis de Newton são válidas somente em um referencial inercial. Qualquer
sistema de referência que está em movimento uniforme respeitando um
sistema inercial também é um sistema referencial,i.e. Invariância de Galileu
ou o princípio da relatividade Newtoniana.7
A lei da inércia aparentemente foi percebida por diferentes cientistas e
filósofos naturais independentemente.
2º Lei de Newton
Lei II: A mudança de movimento é proporcional à força motora imprimida, e
é produzida na direção de linha reta na qual aquela força é imprimida.9 ”
A segunda lei de Newton, também chamada de princípio fundamental da
dinâmica,3 afirma que a força resultante em uma partícula é igual a razão do
tempo de mudança do seu momento linear \scriptstyle \vec p em um sistema
de referência inercial:
\vec {F} = \frac{\mathrm {d}\vec {p}}{\mathrm {d}t} = \frac{\mathrm{d}(m
\vec v)}{\mathrm{d}t},
Esta lei conforme acima apresentada tem validade geral, contudo, para
sistemas onde a massa é uma constante, esta grandeza pode ser retirada da
derivada, o que resulta na conhecida expressão muito difundida no ensino
médio 10 11 12 :
\vec {F} = m\,\frac{\mathrm{d}\vec {v}}{\mathrm{d}t} = m\vec {a},
onde \scriptstyle \vec F é a força resultante aplicada, m é a massa
(constante) do corpo e \scriptstyle \vec a é a aceleração do corpo. A força
resultante aplicada a um corpo produz uma aceleração a ela diretamente
proporcional.

Em casos de sistemas à velocidades constantes e massa variável, a exemplo
um fluxo constante de calcário caindo sobre uma esteira transportadora em
indústrias de cimento, a velocidade pode ser retirada da derivada e a força
horizontal sobre a esteira pode ser determinada como:
\vec {F} = \vec {v} \,\frac{\mathrm{d}m}{\mathrm{d}t} = \vec v \dot m .
onde \scriptstyle \vec v é a velocidade constante da esteira e \scriptstyle
\dot m é a taxa temporal de depósito de massa sobre esta.
Em casos mistos onde há variação tanto da massa como da velocidade - a
exemplo do lançamento do ônibus espacial, ambos os termos fazem-se
necessários.
A segunda lei de Newton em sua forma primeira, \scriptstyle \vec {F} =
\frac{\mathrm {d}\vec {p}}{\mathrm {d}t}, ainda é válida mesmo se os efeitos
da relatividade especial forem considerados, contudo no âmbito da
relatividade a definição de momento de uma partícula requer alteração,
sendo a definição de momento como o produto da massa de repouso pela
velocidade válida apenas no âmbito da física clássica.
Impulso
Um impulso \scriptstyle \vec I ocorre quando uma força \scriptstyle \vec F
age em um intervalo de tempo Δt, e é dado por:13 14
\vec {I} = \int_{\Delta t} \vec F \,\mathrm{d}t .
Já que força corresponde à derivada do momento no tempo, não é difícil
mostrar que:
\vec {I} = \Delta\vec {p}
Trata-se do teorema do impulso variação da quantidade de movimento,
muito útil na análise de colisões e impactos..15 16
Sistema de partículas e massa variável

Sistemas de massa variável, como um foguete queimando combustível e
ejetando partes, não é um sistema fechado, com massa constante, e não
pode ser tratado diretamente pela segunda lei conforme geralmente
apresentada nos cursos de ensino médio, \scriptstyle \vec F = m \veca .11
O raciocínio, dado em AnIntroductiontoMechanics de Kleppner e Kolenkow,
e outros textos atuais, diz que a segunda lei de Newton nesta forma se aplica
fundamentalmente a partículas.12 Na mecânica clássica, partículas tem por
definição massa constante. No caso de um sistema de partículas bem
definido, contudo ainda com massa constante, mostra-se que esta forma da
lei de Newton pode ser estendida ao sistema como um todo, tendo-se então
que:
\Sigma \vec {F}_{\mathrm{ext.}} = M\vec {a}_\mathrm{c.m.}
onde \scriptstyle \Sigma \vec {F}_{\mathrm{ext}} refere-se à soma das forças
externas sobre o sistema, M é a massa total do sistema, e \scriptstyle \vec
{a}_{\mathrm{c.m.}} é a aceleração do centro de massa do sistema.
Para um sistema com massa variável puntual ou tratado como tal em vista da
definição de centro de massa, a equação geral do movimento é obtida
mediante a derivada total encontrada na segunda lei em sua forma primeira:
10
\vec F = \vec {v_{(t)}} \frac{\mathrm{d} m_{(t)}}{\mathrm{d}t} + m_{(t)}
{\mathrm{d} \vec v_{(t)} \over \mathrm{d}t}
onde \scriptstyle \vec v_{(t)} é a velocidade instantânea da massa sobre o
qual se calcula a força e \scriptstyle m_{(t)} corresponde à massa em
questão, ambas no instante t em consideração.
Em análise de lançamento de foguetes é comum expressar-se o termo
associado à variação de massa \scriptstyle \vec {v_{(t)}} \frac{\mathrm{d}
m_{(t)}}{\mathrm{d}t} não em função da massa e da velocidade do objeto
mas sim em função da massa ejetada e da velocidade \scriptstyle \vec u
desta massa ejetada em relação ao centro de massa do objeto (nave) e não

em relação ao referencial escolhido. \scriptstyle \vec ué pois a velocidade
relativa da massa ejetada em relação ao veículo que a ejeta. Mediante tais
considerações mostra-se que:
\Sigma \vecF_{ext} = + m_{(t)} {\mathrm{d} \vec v_{(t)} \over \mathrm{d}t} -
\vec {u_{(t)}} \frac{\mathrm{d} m_{(t)}}{\mathrm{d}t}
O termo \scriptstyle \vec {u} \frac{\mathrm{d_{(t)}} m}{\mathrm{d}t} no lado
direito, conhecido geralmente como o empuxo \scriptstyle \vec E ,
corresponde à força atuando no foguete em um dado instante devido à
ejeção da massa \scriptstyle \mathrm{d}m com velocidade \scriptstyle \vec
u (em relação à nave) devido à ação de seus motores, e o temo à esquerda,
\scriptstyle + m_{(t)} {\mathrm{d} \vec v_{(t)} \over \mathrm{d}t} , à força
total sobre a nave, incluso qualquer força externa que por ventura esteja
simultaneamente atuando sobre o projétil - a saber a força de atrito do ar, ou
outra. Vê-se pois que, em termos de diferenciais, a força total F sobre a nave
é:
\vec F = + m_{(t)} {\mathrm{d} \vec v_{(t)} \over \mathrm{d}t} = \Sigma \vec
F_{ext} + \vec {u_{(t)}} \frac{\mathrm{d} m_{(t)}}{\mathrm{d}t}
Para um caso ideal sem atrito tem-se pois que:
\vec F = m_{(t)} {\mathrm{d} \vec v_{(t)} \over \mathrm{d}t} = \vec {u_{(t)}}
\frac{\mathrm{d} m_{(t)}}{\mathrm{d}t} = \vec E
ou seja, a força a impelir a massa m para frente é devida apenas à ejeção de
massa proporcionada pelos seus foguetes para trás (lembre-se que
\scriptstyle \vec u e \scriptstyle d\vec v têm sentidos opostos, contudo
\scriptstyle \frac{\mathrm{d} m_{(t)}}{\mathrm{d}t} é negativo, pois a massa
diminui com o tempo).
A formulação moderna
Com uma escolha apropriada de unidades, esta lei pode ser escrita como
\vec a= \frac {\vec {F}} {m} ,

sendo:
\veca : aceleração de um ponto material;
\vec {F} : resultante de todas as forças aplicadas ao ponto material;
m: massa de um corpo.
A segunda lei de Newton também podem ser formulada numa forma
equivalente, utilizando o conceito de quantidade de movimento.
Em um referêncial inercial a taxa de variação da quantidade de movimento
de um corpo é igual à resultante de todas as forças externas aplicadas a ele,
\frac {d \vec p} {dt} = \vec{F},
sendo:
\vec p=m\vec v: quantidade de movimento;
\vec v: velocidade;
t: tempo.
Com esta formulação, tal como na precedente, acredita-se que a massa de
um corpo é constante no tempo.17 18 Às vezes, são feitas tentativas de
estender a aplicação da equação \scriptstyle \frac {d \vec p} {dt} = \vec{F}
para o caso de corpos com massa variável. No entanto, com uma
interpretação ampla da equação , modificou significativamente a sua
determinação anterior e alterou o significado dos conceitos fundamentais
como um corpo de massa, força e potência.19
Observações referentes à segunda lei de Newton
Quando existem várias forças em um ponto material, tendo em conta o
princípio da superposição da segunda lei de Newton é escrita como:
m \vec a = \sum_{i=1}^{n} {\vec{F_i}}
ou

\vec p(t) -\vec p(t_0) =\sum_{i=1}^{n} \int^t_{t_0} {\vec{F_i}} \ d t.
A segunda lei de Newton é válida apenas para velocidades muito inferiores a
velocidade da luz, e em sistemas de referência inerciais. Para velocidades
próximas à velocidade da luz, as leis são usadas são da teoria da relatividade.
Das leis de Newton imediatamente se tomaram algumas conclusões
interessantes. Por exemplo, a terceira lei de Newton diz que, enquanto um
corpo age ou interage, não pode mudar a sua dinâmica no total: existe uma
lei de conservação do momento. Além disso, a exigência de que o potencial
de interação entre os dois corpos é dependente apenas na diferença
absoluta entre as coordenadas desses corpos, onde há uma lei da
conservação da energia mecânica total dos corpos que interagem:
{m {v}_1^2 \over 2} + {m {v}_2^2 \over 2} + U(|{r}_1 - {r}_2|) =
\operatorname{const}.
As leis de Newton são as leis básicas da mecânica. A partir destas pode se
derivar das equaçãoes de movimento de sistemas mecânicos. No entanto,
nem todas as leis da mecânica podem ser derivadas a partir das leis de
Newton. Por exemplo, a lei da gravidade ou a lei de Hooke não são
conseqüências das três leis de Newton.
3 º Lei de Newton
Lei III: A toda ação há sempre uma reação oposta e de igual intensidade: ou
as ações mútuas de dois corpos um sobre o outro são sempre iguais e
dirigidas em sentidos opostos.9 ”
A terceira lei de Newton, ou Princípio da Ação e Reação,3 diz que a força
representa a interação física entre dois corpos distintos ou partes distintas de
um corpo,20 . Se um corpo A exerce uma força em um corpo B, o corpo B
simultaneamente exerce uma força de mesma magnitude no corpo A—
ambas as forças possuindo mesma direção, contudo sentidos contrários.
Como mostrado no esquema ao lado, as forças que os esquiadores exercem

um sobre o outro são iguais em magnitude, mas agem em sentidos opostos.
Embora as forças sejam iguais, as acelerações de ambos não o são
necessariamente: quanto menor a massa do esquiador maior será sua
aceleração.
As duas forças na terceira lei de Newton têm sempre a mesma natureza. A
exemplo, se a rua exerce uma força ação para frente no pneu de um carro
acelerando em virtude do atrito entre este pneu e o solo, então também é
uma força de atrito a força reação que empurra o asfalto para trás.
De forma simples: a força é a expressão física da interação entre dois entes
físicos: há sempre um par de forças a agir em um par de objetos, e não há
força solitária sem a sua contra-parte. As forças na natureza aparecem
sempre aos pares e cada par é conhecido como uma par ação - reação.
Newton usou suas leis para obter a Lei da Conservação do Momento
Linear21 no entanto por uma perspectiva mais profunda, a conservação do
momento linear é a ideia mais fundamental (obtida pelo Teorema de
Noether da invariância de Galileu), sendo mantida em casos onde a terceira
lei de Newton aparentemente falha, por exemplo quando há ondas
eletromagnéticas envolvidas ou em alguns tópicos associados à mecânica
quântica.
Aplicações das leis de Newton
A maior dificuldade de estudantes de física do ensino médio é com relação à
solução de problemas, nas mais diversas frentes da disciplina.
Apresentarei aqui a solução de um exercício sobre interação entre blocos,
relacionado a aplicação das Leis de Newton.
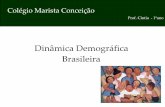
Exemplo 1) (UF-PE) A figura abaixo mostra três blocos de massas mA = 1,0 kg,
mB = 2,0 kg e mc = 3,0 kg. Os blocos se movem em conjunto, sob a ação de
uma força F constante e horizontal, de módulo 4,2 N.

Desprezando o atrito, qual o módulo da força resultante sobre o bloco B?
a) 1,0 N
b) 1,4 N
c) 1,8 N
d) 2,2 N
e) 2,6 N
Solução.
Primeiramente devemos saber que F = m.a (Segunda lei de Newton). Devemos saber também, que os três corpos se movem com a mesma aceleração, e que essa aceleração tem a mesma direção e sentido da força F.
Assim podemos calcular a aceleração dos blocos pelo Sistema de Corpos Isolados (SCI)
Na figura abaixo representamos as forças que agem em A, B e C

Em que F é a força aplicada.
Fa no primeiro bloco é a reação de b em a devido a F.
Fa no segundo bloco é a ação de a em b devido a F
Fc no segundo bloco é a reação de c em b devido a F
Fc no terceiro bloco é a ação de de b em c devido a F
n é a força normal e p é a força peso nos três casos
Simplificando-se os pesos com as forças de reação normal em cada caso temos que:
Como F = 4,2 N, temos:
4,2 = (1,0 + 2,0 + 3,0).a
a = 4,2/6
a = 0,7 m/s2
Encontrada a aceleração devemos encontrar o valor da resultante em B.
A resultante em B é: FB = FA – FC
Subtraído as equações B e C temos:
FA = (mB + mC) . a
FA = (2,0 + 3,0). 0,7
FA = 5,0 . 0,7
FA = 3,5 N
Encontrando o valor de FC
FC = mC .a
FC = 3,0 . 0,7
FC = 2,1 N

Assim:
FB = 3,5 – 2,1
FB = 1,4 N
Concluímos então que a força resultante em B é igual a 1,4 N.
Força de atríto
Quando empurramos ou puxamos um corpo qualquer de massa m, percebemos que existe certa dificuldade; e, em alguns casos, percebe-se que o corpo não entra em movimento. Qual a explicação para isso? O que acontece é que toda vez que puxamos ou empurramos um corpo, aparece uma força que é contrária ao movimento. Essa força é chamada de Força de Atrito. A definição de força de atrito é a força natural que atua sobre os corpos quando estes estão em contato com outros corpos e sofrem a ação de uma força que tende a colocá-lo em movimento, e ela é sempre contrária ao movimento ou à tendência de movimento. A força de atrito aparece em razão das rugosidades existentes nas superfícies dos corpos. O atrito depende da força normal entre o objeto e a superfície de apoio; quanto maior for a força normal, maior será a força de atrito. Matematicamente podemos calcular a força de atrito a partir da seguinte equação:
Fat = μ.N
Onde o μ (letra grega mi) é chamado de coeficiente de atrito que depende da natureza dos corpos em contato e do estado de polimento e lubrificação da superfície. Essa é uma grandeza adimensional, ou seja, ela não tem unidade. No Sistema Internacional de Unidades (SI) a unidade de força de atrito é o newton (N).

Existem dois tipos de força de atrito: força de atrito estático e força de atrito cinético. Tanto um quanto o outro estão sempre contrários à tendência de movimento ou à movimentação dos corpos.
Força Centrípeta
é a força resultante que puxa o corpo para o centro da trajetória em um
movimento curvilíneo ou circular.
Objetos que se deslocam em movimento retilíneo uniforme possuem
velocidade modular constante. Entretanto, um objeto que se desloca em
arco, com o valor da velocidade constante, possui uma variação na direção
do movimento; como a velocidade é um vetor de módulo, direção e sentido,
uma alteração na direção implica uma mudança no vetor velocidade. A razão
dessa mudança na velocidade é a aceleração centrípeta.
Como força é dada pela fórmula:
\vec{F} = {m\vec{a}}
e a aceleração, neste caso particular, corresponde à aceleração centrípeta
dada pela fórmula:
\veca_c = -{|\vec{v}|^2 \over {r}} \hat{r}
temos a força centrípeta que pode ser calculada como:
\vec{F} = {m}{|\vec{v}|^2 \over {r}} \hat{r}
Onde
{m} \, é a massa (em quilogramas no SI),
{\vec{v}} é a velocidade linear do corpo (em metros por segundo no SI)
{r} \, é o raio da trajetória percorrida pelo corpo (em metros no SI).
Em todo movimento circular existe uma força resultante na direção radial
que atua como força centrípeta, de modo que a força centrípeta não existe

por si só. Por exemplo, o atrito entre o solo e o pneu do carro faz o papel da
força centrípeta quando o carro faz curvas. A força gravitacional faz o mesmo
papel no movimento de satélites em torno da Terra. Assim sendo:
Impulso
Impulso é a grandeza física que mede a variação da quantidade de
movimento de um objeto. É causado pela ação de uma força\vec F atuando
durante um intervalo de tempo \Delta t . Uma pequena força aplicada
durante muito tempo pode provocar a mesma variação de quantidade de
movimento que uma força grande aplicada durante pouco tempo. Ambas as
forças provocaram o mesmo impulso.
A unidade no Sistema Internacional de Unidades para o impulso é o N•s
(newton segundo ou newton vezes segundo).
A velocidade de um corpo é transferida a outro idêntico
A unidade do Impulso também pode ser escrita como o produto da unidade
de massa, o quilograma, pela unidade de velocidade, o metro por segundo,
demonstrando-se facilmente que "quilograma metro por segundo" (kg.m/s) é
equivalente a "newton segundo" (N.s). Via de regra, ao falar-se de impulso,
dá-se preferência pelo "N.s"; ao falar-se de variação da quantidade e
movimento, dá-se preferência ao "kg.m/s". Contudo não há problema algum
em se intercambiar as duas.
Quantidade de Movimento
Se observarmos alguns acontecimentos em nossa vida diária, veremos que a
física está diretamente ou indiretamente envolvida. Seja em nosso caminhar,

ou no mover dos automóveis, seja quando andamos de bicicletas etc. Com
isso, podemos concluir que a física faz parte de nossas vidas.
Vejamos um exemplo: O que você acha mais fácil de fazer, parar uma bola de
tênis a 20 km/h ou parar um carro com a mesma velocidade? Certamente a
resposta que você dirá é parar uma bola de tênis. Mas o que podemos tirar
de física envolvida nessa situação? Tiramos a definição de Quantidade de
Movimento de um corpo.
Esse exemplo nos permite deduzir que tanto a massa, quanto a velocidade
são importantes na descrição do movimento e que uma grandeza que se
relacione com a massa e a velocidade do objeto caracteriza melhor o
movimento do que somente a velocidade. Essa grandeza, que indica quanto
de matéria, isto é, quanto de massa, está se movendo e com que velocidade
ela se move, é a quantidade de movimento.
Na física, definimos a quantidade de movimento, representada por (ρ), de
um corpo que possui massa m e velocidade v como sendo o produto da
massa pela velocidade.
Isso nos permite dizer que qualquer corpo que possui massa e velocidade
possui quantidade de movimento. Então, voltando ao exemplo da bola de
tênis e do carro, vemos que o carro possui maior quantidade de movimento
do que a bola de tênis.
Matematicamente, expressamos a quantidade de movimento como:
Não podemos nos esquecer de que a quantidade de movimento de um corpo
é uma grandeza vetorial, portanto, ela possui módulo, direção e sentido. A
unidade de medida da quantidade de movimento no SI é kg.m/s. A
quantidade de movimento, por ser vetorial, possui sempre a mesma direção
e sentido da velocidade. Sendo assim, dizemos que só o valor da quantidade
de movimento não define a grandeza, pois precisamos saber a direção e
sentido.

Podemos concluir, pela equação acima, que a quantidade de movimento de
um corpo é diretamente proporcional à massa e à velocidade, sendo assim,
um grande valor de quantidade de movimento pode significar uma grande
massa ou uma alta velocidade.