Banner - III Mostra de Ciência e Tecnologia - Pedro Victor Gomes
1
A Linearização Exata por Realimentação é um método que permite converter em dinâmica linear, um sistema não linear através da realimentação das suas não linearidades. Para atingir este objetivo torna-se quase sempre necessário efetuar uma mudança de variável de estado e introduzir uma variável de entrada auxiliar. Depois de ter o sistema não linear modificado de modo a que o todo se comporte como linear, é possível utilizar técnicas de controle lineares, bem conhecidas e mais poderosas do que as não lineares, para se efetuar o controle do sistema original. Essa técnica tem sido utilizada com êxito numa grande gama de aplicações: controle de braços manipuladores, peças de artilharia, helicópteros, aviões e satélites. Modelagem e Controle de Nível de um sistema não linear empregando a metodologia de Linearização Exata por Realimentação INTRODUÇÃO CONCLUSÃO A utilização dessa metodologia elimina o grande problema de restringir o controle à uma margem em torno de um ponto de operação, permitindo um satisfatório domínio em toda a faixa de operação, admitindo o emprego de controladores lineares e aplicando as técnicas usualmente utilizadas academicamente. O objetivo desta pesquisa é avaliar o desempenho do controle de nível de um tanque cônico, que apresenta uma dinâmica não linear, utilizando um Controlador Digital PID (Proporcional, Integral e Derivativo) modificado e utilizando a técnica de Linearização Exata por Realimentação para que o sistema atue em toda faixa de operação. O modelo discreto do Controlador PID pode ser observado na Equação abaixo: OBJETIVO RESULTADOS PRELIMINARES O principal resultado foi à obtenção de modelos satisfatoriamente robustos e com parâmetros que podem ser prontamente substituídos por suas constantes de acordo com os aspectos geométricos e físicos do tanque a ser construído. Os modelos levaram em consideração diversas características físicas (perda de carga através do escoamento do fluido, velocidade do escoamento, saturação dos atuadores e atraso dos elementos sensores), eliminando ligeiramente algumas particularidades e afetando positivamente a acurácia do controlador projetado. Além disso, a simulação computacional também revelou que a metodologia da linearização aplicada é válida para sistemas particularmente complexos, comumente encontrados na prática. A Equação 2 representa o modelo do tanque (tronco cônico) REFERÊNCIAS BOYLESTAD, R. L. e Nashelsky, L. (1998). Dispositivos Eletrônicos e Teoria de Circuitos. Prentice-Hall do Brasil. DORF, Richard C.; BISHOP Robert H. Sistemas de Controle Moderno. 8 Ed. Rio de Janeiro, RJ, BRASIL. LTC. 2001. OGATA, Katsuhiko. Engenharia de Controle Moderno. 4 Ed. São Paulo, SP, BRASIL. Prentice Hall, 2003 CAMPOS, M. e TEIXEIRA, H., Controles Típicos METODOLOGIA O objetivo de controle é que a saída acompanhe o sinal de referência. Porém, a não linearidade intrínseca do sistema e dos sensores (atraso) e atuadores (saturação e zona morta) proporcionam certas dificuldades. Inicialmente, foi realizada a modelagem caixa branca do processo, baseando-se na aplicação de leis físicas que atuam no sistema, utilizando seus princípios fundamentais, tais como as leis de conservação de energia, massa e momento, para determinar as equações diferenciais que compõem o modelo. Em seguida, foi aplicado a técnica de Linearização Exata por Realimentação no Matlab/Simulink®, obtendo resultados satisfatórios para os dois modelos esquematizados. Após a simulação e validação dos modelos, foi desenvolvido o algoritmo do Controlador Digital PID em Linguagem C levando em consideração os critérios de estabilidade e o efeito da quantização e amostragem dos conversores A/D e D/A do microcontrolador empregado. O PID digital projetado foi customizado com técnicas utilizadas nos controladores industriais e alguns filtros BRITO, Pedro Victor Gomes Cabral ; BRITO, Lázaro Edmilson Figura 2 – Diagrama de blocos do sistema evidenciando a realimentação das não linearidades da planta
-
Upload
pedro-victor-gomes -
Category
Technology
-
view
282 -
download
1
Transcript of Banner - III Mostra de Ciência e Tecnologia - Pedro Victor Gomes

A Linearização Exata por Realimentação é um método que permite converter em dinâmica linear, um sistema não linear através da realimentação das suas não linearidades. Para atingir este objetivo torna-se quase sempre necessário efetuar uma mudança de variável de estado e introduzir uma variável de entrada auxiliar. Depois de ter o sistema não linear modificado de modo a que o todo se comporte como linear, é possível utilizar técnicas de controle lineares, bem conhecidas e mais poderosas do que as não lineares, para se efetuar o controle do sistema original. Essa técnica tem sido utilizada com êxito numa grande gama de aplicações: controle de braços manipuladores, peças de artilharia, helicópteros, aviões e satélites.
Modelagem e Controle de Nível de um sistema não linear empregando a metodologia de Linearização Exata por Realimentação
INTRODUÇÃO
CONCLUSÃO
A utilização dessa metodologia elimina o grande problema de restringir o controle à uma margem em torno de um ponto de operação, permitindo um satisfatório domínio em toda a faixa de operação, admitindo o emprego de controladores lineares e aplicando as técnicas usualmente utilizadas academicamente.
O objetivo desta pesquisa é avaliar o desempenho do controle de nível de um tanque cônico, que apresenta uma dinâmica não linear, utilizando um Controlador Digital PID (Proporcional, Integral e Derivativo) modificado e utilizando a técnica de Linearização Exata por Realimentação para que o sistema atue em toda faixa de operação. O modelo discreto do Controlador PID pode ser observado na Equação abaixo:
OBJETIVO
RESULTADOS PRELIMINARES
O principal resultado foi à obtenção de modelos satisfatoriamente robustos e com parâmetros que podem ser prontamente substituídos por suas constantes de acordo com os aspectos geométricos e físicos do tanque a ser construído. Os modelos levaram em consideração diversas características físicas (perda de carga através do escoamento do fluido, velocidade do escoamento, saturação dos atuadores e atraso dos elementos sensores), eliminando ligeiramente algumas particularidades e afetando positivamente a acurácia do controlador projetado. Além disso, a simulação computacional também revelou que a metodologia da linearização aplicada é válida para sistemas particularmente complexos, comumente encontrados na prática. A Equação 2 representa o modelo do tanque (tronco cônico)
REFERÊNCIAS
BOYLESTAD, R. L. e Nashelsky, L. (1998). Dispositivos Eletrônicos e Teoria de Circuitos. Prentice-Hall do Brasil. DORF, Richard C.; BISHOP Robert H. Sistemas de Controle Moderno. 8 Ed. Rio de Janeiro, RJ, BRASIL. LTC. 2001. OGATA, Katsuhiko. Engenharia de Controle Moderno. 4 Ed. São Paulo, SP, BRASIL. Prentice Hall, 2003 CAMPOS, M. e TEIXEIRA, H., Controles Típicos de Equipamentos e Processos Industriais, Edgard Blücher, 2006.
METODOLOGIA
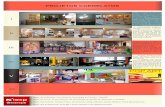
O objetivo de controle é que a saída acompanhe o sinal de referência. Porém, a não linearidade intrínseca do sistema e dos sensores (atraso) e atuadores (saturação e zona morta) proporcionam certas dificuldades. Inicialmente, foi realizada a modelagem caixa branca do processo, baseando-se na aplicação de leis físicas que atuam no sistema, utilizando seus princípios fundamentais, tais como as leis de conservação de energia, massa e momento, para determinar as equações diferenciais que compõem o modelo. Em seguida, foi aplicado a técnica de Linearização Exata por Realimentação no Matlab/Simulink®, obtendo resultados satisfatórios para os dois modelos esquematizados. Após a simulação e validação dos modelos, foi desenvolvido o algoritmo do Controlador Digital PID em Linguagem C levando em consideração os critérios de estabilidade e o efeito da quantização e amostragem dos conversores A/D e D/A do microcontrolador empregado. O PID digital projetado foi customizado com técnicas utilizadas nos controladores industriais e alguns filtros digitais foram inseridos no algoritmo para aperfeiçoar o controle.
BRITO, Pedro Victor Gomes Cabral ; BRITO, Lázaro Edmilson
Figura 2 – Diagrama de blocos do sistema evidenciando a realimentação das não linearidades da planta