Analise N´ ao-Linear de Pavimentos de Edif˜ ´ıcios de ... · nao-linear de pavimentos de edif˜...
17
An´ alise N ˜ ao-Linear de Pavimentos de Edif´ ıcios de Concreto Armado Atrav´ es do M´ etodo dos Elementos Finitos Non Linear Analysis of Reinforced Concrete Building Floors by Finite Element Method Leandro Mota Peres 1 ; Roque Luiz da Silva Pitangueira 2 1 Mestrando do Programa de P´ os-Graduac ¸˜ ao em Engenharia de Estruturas da Universidade Federal de Minas Gerais; [email protected] 2 Professor do Departamento de Engenharia de Estruturas da Universidade Federal de Minas Gerais; [email protected] Resumo Este texto apresenta uma proposta para dissertac ¸˜ ao de mestrado em Engenharia de Estruturas na ´ area de an´ alise n˜ ao-linear de pavimentos de edif´ ıcios de concreto armado atrav´ es do m´ etodo dos elementos finitos. Inicia-se com uma revis˜ ao bibliogr´ afica, apresentando trabalhos relacionados com o tema proposto, as considerac ¸˜ oes da norma brasileira de projeto de estruturas de concreto NBR 6118:2007 sobre n˜ ao-linearidade e algumas informac ¸˜ oes sobre programas comerciais para c´ alculo e detalhamento de estruturas de concreto. Posteriormente ´ e apresentado os recursos do sistema computacional INSANE para a an´ alise fisicamente n˜ ao linear de estruturas. Por fim, busca-se detalhar a metodologia do futuro trabalho. Palavras-chave: An´ alise N˜ ao Linear, M´ etodo dos Elementos Finitos, Pavimentos de Edif´ ıcios de Concreto Armado Abstract This paper presents a proposal for Masters dissertation in Structural Engineering in the area of nonlinear analysis of reinforced concrete building floor by Finite Element Method. It begins with a bibliographic review, presenting the researches related to the proposed topic, the considerations from the brazilian norm of concrete structures design NBR 6118:2007 about non-linearity, and some information about commercial programs for calculation and detailing of concrete structures. Later it presents computational system resources INSANE for physics nonlinear analysis of structures. Finally, it seeks to detail the methodology of future work. Key words: Nonlinear Analysis, Finite Element Method, Reinforced Concrete Building Floors. 1 Introduc ¸˜ ao A an´ alise estrutural consiste na obtenc ¸˜ ao das respostas da estrutura perante as ac ¸˜ oes que lhe foram aplicadas, ou seja, o c´ alculo dos deslocamentos e esforc ¸os solicitantes nos el- ementos que comp˜ oem a estrutura, como lajes, vigas e pi- lares. Embora o produto final do projeto de uma estrutura seja composto por desenhos diversos, a an´ alise estrutural de um edif´ ıcio pode ser caracterizada como a etapa mais impor- tante do projeto, pois com os seus resultados o dimension- amento e detalhamento dos elementos s˜ ao realizados, assim como o comportamento em servic ¸o ´ e verificado. Para analisar um edif´ ıcio ´ e necess´ ario adotar um modelo estrutural que seja capaz de simular o comportamento da es- trutura na realidade. Diversos modelos podem ser emprega- dos na an´ alise de edif´ ıcios de concreto armado, sendo alguns deles direcionados exclusivamente ` a an´ alise de pavimentos (viga cont´ ınua e lajes por m´ etodos simplificados, grelha so- mente de viga, grelha de viga e laje, e elementos finitos de placa), e outros direcionados ` a avaliac ¸˜ ao do edif´ ıcio como um todo (p ´ ortico plano e p ´ ortico espacial). Em relac ¸˜ ao ` a an´ alise dos pavimentos de edif´ ıcios, com- posto por lajes e vigas, foi feito durante muitos anos um c´ alculo de maneira simplificada, considerando as lajes iso- ladas apoiadas em vigas r´ ıgidas. O principal motivo do uso dessa aproximac ¸˜ ao era a falta de recursos computacionais que fossem capazes de resolver um grande n´ umero de equac ¸˜ oes simultˆ aneas necess´ arias para avaliar um pavimento como um todo. Para as situac ¸˜ oes em que os pain´ eis s˜ ao forma- dos por lajes quadradas ou retangulares, com dimens˜ oes n˜ ao muito diferentes entre si e com vigas de apoio suficiente- mente r´ ıgidas para que se possa considerar os apoios das la- jes indeform´ aveis, o procedimento simplificado de se con- siderar as lajes como isoladas n˜ ao leva a resultados muito diferentes daqueles obtidos com uma an´ alise do pavimento interno por analogia de grelha ou pelo m´ etodo dos elemen- Mostra PROPEEs UFMG, 29 e 30 de Abril de 2013 1
Transcript of Analise N´ ao-Linear de Pavimentos de Edif˜ ´ıcios de ... · nao-linear de pavimentos de edif˜...

Analise Nao-Linear de Pavimentos de Edifıcios de Concreto ArmadoAtrav es do Metodo dos Elementos Finitos
Non Linear Analysis of Reinforced Concrete Building Floors by FiniteElement Method
Leandro Mota Peres1; Roque Luiz da Silva Pitangueira2
1 Mestrando do Programa de Pos-Graduacao em Engenharia de Estruturas da Universidade Federal de Minas Gerais;[email protected]
2 Professor do Departamento de Engenharia de Estruturas da Universidade Federal de Minas Gerais; [email protected]
ResumoEste texto apresenta uma proposta para dissertacao de mestrado em Engenharia de Estruturas naarea de analisenao-linear de pavimentos de edifıcios de concreto armado atraves do metodo dos elementos finitos. Inicia-se com umarevisao bibliografica, apresentando trabalhos relacionados com o tema proposto, as consideracoes da norma brasileirade projeto de estruturas de concreto NBR 6118:2007 sobre nao-linearidade e algumas informacoes sobre programascomerciais para calculo e detalhamento de estruturas de concreto. Posteriormentee apresentado os recursos do sistemacomputacional INSANE para a analise fisicamente nao linear de estruturas. Por fim, busca-se detalhar a metodologiado futuro trabalho.
Palavras-chave: Analise Nao Linear, Metodo dos Elementos Finitos, Pavimentos de Edifıcios de Concreto Armado
AbstractThis paper presents a proposal for Masters dissertation in Structural Engineering in the area of nonlinear analysis ofreinforced concrete building floor by Finite Element Method. It begins with a bibliographic review, presenting theresearches related to the proposed topic, the considerations from the brazilian norm of concrete structures designNBR 6118:2007 about non-linearity, and some information about commercial programs for calculation and detailingof concrete structures. Later it presents computational system resources INSANE for physics nonlinear analysis ofstructures. Finally, it seeks to detail the methodology of future work.
Key words: Nonlinear Analysis, Finite Element Method, Reinforced Concrete Building Floors.
1 Introduc ao
A analise estrutural consiste na obtencao das respostas daestrutura perante as acoes que lhe foram aplicadas, ou seja,o calculo dos deslocamentos e esforcos solicitantes nos el-ementos que compoem a estrutura, como lajes, vigas e pi-lares. Embora o produto final do projeto de uma estruturaseja composto por desenhos diversos, a analise estrutural deum edifıcio pode ser caracterizada como a etapa mais impor-tante do projeto, pois com os seus resultados o dimension-amento e detalhamento dos elementos sao realizados, assimcomo o comportamento em servicoe verificado.
Para analisar um edifıcio e necessario adotar um modeloestrutural que seja capaz de simular o comportamento da es-trutura na realidade. Diversos modelos podem ser emprega-dos na analise de edifıcios de concreto armado, sendo algunsdeles direcionados exclusivamentea analise de pavimentos(viga contınua e lajes por metodos simplificados, grelha so-
mente de viga, grelha de viga e laje, e elementos finitos deplaca), e outros direcionadosa avaliacao do edifıcio comoum todo (portico plano e portico espacial).
Em relacao a analise dos pavimentos de edifıcios, com-posto por lajes e vigas, foi feito durante muitos anos umcalculo de maneira simplificada, considerando as lajes iso-ladas apoiadas em vigas rıgidas. O principal motivo do usodessa aproximacao era a falta de recursos computacionais quefossem capazes de resolver um grande numero de equacoessimultaneas necessarias para avaliar um pavimento comoum todo. Para as situacoes em que os paineis sao forma-dos por lajes quadradas ou retangulares, com dimensoes naomuito diferentes entre si e com vigas de apoio suficiente-mente rıgidas para que se possa considerar os apoios das la-jes indeformaveis, o procedimento simplificado de se con-siderar as lajes como isoladas nao leva a resultados muitodiferentes daqueles obtidos com uma analise do pavimentointerno por analogia de grelha ou pelo metodo dos elemen-
Mostra PROPEEs UFMG, 29 e 30 de Abril de 20131

Peres, L. M.; Pitangueira, R. L. S.
tos finitos. Porem, nasultimas decadas, as imposicoes ar-quitetonicas e a crescente demanda de melhor aproveitamentodos espacos internos de um edifıcio levaram os projetistasa utilizarem elementos estruturais mais esbeltos e vao livrescada vez maiores.
Diante dessas circunstancias, tornou-se de fundamentalimportancia uma analise mais precisa do comportamento dospavimentos de edifıcios, principalmente em relacao as suadeformacoes, uma vez que o surgimento de flechas exces-sivas podem inviabilizar a utilizacao de uma obra. Parasuprir esta necessidade, os metodos simplificados foram sub-stituıdos pelo metodo de analogia de grelha e pelo metododos elementos finitos. Com a utilizacao destes metodos maissofisticados foi possıvel formular modelos de analise levandoem conta a alteracao das propriedades dos materiais e da ge-ometria, ou seja, foi possıvel considerar o comportamentonao linear das estruturas.
As acoes adicionais provenientes do deslocamento de umaestrutura podem ocasionar acrescimos de esforcos capazesde conduzi-la ao colapso. O tipo de analise que consi-dera o equilıbrio da estrutura em sua posicao deslocadaedenominada analise com nao linearidade geometrica e suaconsideracao e fundamental na avaliacao da estabilidadeglobal de edifıcios e na analise local de pilares. Por outrolado, quando se leva em conta que o comportamento domaterial constituinte da estrutura, no caso o concreto ar-mado, nao e elastico perfeito devido ao efeito da fissuracao,fluencia, escoamento das armaduras, bem como outros fa-tores que conferem ao concreto um comportamento nao lin-ear, a analisee denominada analise fisicamente nao-linear esua consideracaoe adotada na analise mais refinada de flechasem pavimentos e na analise dos esforcos locais utilizado nodimensionamento de pilares.
Atraves da analise nao-lineare possıvel simular o compor-tamento de um edifıcio de concreto armado de forma muitomais realista, porem, sua utilizacao so e possıvel com o uso derecursos computacionais, visto quee totalmente inviavel re-alizar os calculos envolvidos em uma analise nao linear man-ualmente.
Os sistemas computacionais atuais dispoe de inumerostipos de analises nao-lineares, dentre esses sistemas destaca-se o INSANE (INteractive Structural ANalysis Environment)que e um programa desenvolvido no Departamento de En-genharia de Estruturas da UFMG segundo o paradigma deProgramacao Orientada a Objetos, utilizando a linguagemJAVA. O sistemae baseado no Metodo dos Elementos Finitose possui recursos para a analise nao linear fısica e geometrica.
Utilizando os recursos do programa INSANE, o objetivoprincipal do futuro trabalhoe analisar pavimentos de edifıciosde concreto armado mediante a utilizacao do metodo dos ele-mentos finitos e considerando a nao-linearidade fısica. Alemdisso, busca-se fornecer conceitos que possam ser incluıdosna pratica de projetos estruturais, visando interpretar de formamais crıtica resultados obtidos por programas de elementos
finitos.Para apresentar de forma mais clara o projeto de
dissertacao, este texto foi dividido em tres partes. Primeira-mentee feita uma revisao bibliografica apresentando os tra-balhos relacionados com o tema proposto, as consideracoesda norma brasileira de projeto de estruturas de concreto NBR6118:2007 sobre nao-linearidade, e algumas informacoes so-bre programas comerciais para calculo e detalhamento de es-truturas de concreto. Posteriormentee apresentado os recur-sos do INSANE para a analise fisicamente nao linear de es-truturas. Por fim, busca-se detalhar a metodologia do futurotrabalho.
2 REVISAO BIBLIOGR AFICA
2.1 Trabalhos Relacionados
No trabalho de Carvalho (1994) sao analisados pavimentosde edifıcios levando-se em conta a nao-linearidade do con-creto devidaa fissuracao, a flexao e a torcao. E consid-erado tambem, o efeito da fluencia nos deslocamentos. Opavimento de edifıcio de concreto, constituıdo de lajes e vi-gas,e analisado considerando a interacao de seus elementos,utilizando-se o metodo da analogia da grelha. A consideracaoda fissuracaoe feita a partir das relacoes momento-curvaturapara a flexao, e momento-rotacao para a torcao. Com o em-prego da relacao momento-curvatura, calculam-se os deslo-camentos transversais de vigas de concreto, comparando-oscom resultados experimentais. A partir destas idealizacoesestruturais, sao feitas analises dos esforcos e deslocamentostransversais de lajes isoladas, de lajes associadas e vigas for-mando um pavimento representativo. Os resultados obtidossao comparados com os do procedimento usual, em queefeita a decomposicao do pavimento em vigas e lajes, bemcomo os de analise linear, considerando a analogia de grelhae, em alguns casos, o metodo dos elementos finitos.
Um outro trabalho sobre a analise de pavimentos deedifıcios foi desenvolvido por Baptista (1994) utilizando oMetodo dos Elementos finitos e comparando os resultadoscom os gerados a partir do modelo de grelha. Neste trabalhoa nao linearidade fısica do concreto nao foi considerada.
Pinto e Ramalho (2002) discutem procedimentos simplifi-cados para a consideracao da nao linearidade fısica e da naolinearidade geometrica na analise de edifıcios de concretoarmado, com o objetivo de estabelecer o grau de confiabil-idade desses processos. Algumas prescricoes para reducaoda inercia dos elementos estruturais sao comparadas com osresultados obtidos atraves de modelos de elementos finitos,permitindo, assim, a avaliacao destas prescricoes.
Araujo (2003) apresenta um modelo nao-linear para aanalise de lajes nervuradas de concreto armado. O mo-delo considera a nao-linearidade fısica do concreto em com-pressao, bem como a colaboracao do concreto tracionado en-tre fissuras. A formulacao e baseada na teoria de placas de
2Mostra PROPEEs UFMG, 29 e 30 de Abril de 2013

Analise Nao-Linear de Pavimentos de Edifıcios de Concreto Armado Atraves do Metodo dos Elementos Finitos
Mindlin. A analise estruturale realizada com o emprego dometodo dos elementos finitos, adotando-se um algoritmo it-erativo para a solucao do sistema de equacoes nao-lineares.Para as integracoes ao longo da espessura da laje, adota-seuma discretizacao em camadas. Atraves da definicao de pro-priedades equivalentes,e realizada a analise nao-linear de la-jes nervuradas de concreto armado. O modelo nao-lineareempregado para verificar a pertinencia dos usuais criterios deprojeto de lajes nervuradas de concreto armado, estabelecidosnas normas de projeto.
Bandeira (2006) analisa lajes macicas de concreto armadoatraves do metodo dos elementos finitos e compara os resul-tados com os obtidos de pesquisas experimentais realizadasem lajes de concreto armado levadasa ruına por flexao. Paraa modelagem foi usada a versao 8.1.2 do programa DIANAe a investigacao do comportamento das lajes foi feita atravesde analise nao-linear, adotando-se elementos finitos de cascae solido. O comportamento das lajes foi analisado atravesdos deslocamentos centrais e abordou a influencia do posi-cionamento das armaduras, dos apoios e dos parametros quedefinem o comportamento do concreto na fase de amolec-imento, destacando-se a maxima resistencia do concretoatracao.
2.2 Algumas Consideracoes da NBR6118:2007 sobre a Nao-Linearidade Fısica
De forma geral, pode-se afirmar que uma das grandesmodificacoes da nova norma de concreto com relacaoa antigaNBR6118:1980e a apresentacao de maneira mais explıcita eincisiva de como as nao-linearidades fısica e geometrica de-vem ser consideradas na elaboracao de projetos estruturaisde edifıcios. Por exemplo, o item 15.3 da NBR 6118:2007 -“Princıpios basicos de calculo”, prescreve de forma bastanteclara: “A nao-linearidade fısica, presente nas estruturas deconcreto, deve ser obrigatoriamente considerada (KIMURA ,2007).
Um dos fatores que geram a nao linearidade fısica do con-cretoe a fissuracao. Em elementos predominantemente fleti-dos, como as vigas e lajes, a fissuracao influencia direta-mente na resposta nao-linear da estrutura e sua consideracaoefundamental para o calculo dos deslocamentos dessas pecas.A norma de concreto, no item 17.3.2 - “Estado limite dedeformacao” exige a consideracao da presenca de fissuras noconcreto para calculo de deslocamentos.
Uma das maneiras de considerar a fissuracao de uma pecade concreto armado, de forma aproximada,e reduzir o valorde sua rigidez a flexao. A NBR 6118:2007, item 15.7.3 -Consideracao aproximada da nao-linearidade fısica, defineuma correcao de rigidez de forma aproximada na analise daestabilidade global de uma edifıcio da seguinte forma:
- lajes: (EI)sec = 0, 3EciIc
- vigas: (EI)sec = 0, 4EciIc para A′
s 6= As e(EI)sec = 0, 5EciIc para A
′
s = As
- pilares:(EI)sec = 0, 8EciIc
onde,(EI)sec e a rigidez secante;Eci e o modulo de elasticidade tangente;Ic e o momento de inercia da secao bruta de concreto;As e aarea da secao transversal da armadura longitudinal
de tracao;A′
s e a area da secao da armadura longitudinal de com-pressao.
A avaliacao aproximada das flechas imediatas em vigaspela rigidez equivalenteEIeq, de tal modo a considerar anao-linearidade fısica ocasionada predominantemente pelafissuracao do concreto,e especificada pela norma no item17.3.2.1.1 - Flecha imediata em vigas de concreto armado.
2.3 Programas Comerciais
Atualmente existem diversos programas que fazem a analise,dimensionamento e detalhamento de edifıcios de concretoarmado. Dentre esses programas, dois dos mais utilizadossao o Eberick da AltoQi e o sistema CAD/TQS da TQS,ambos desenvolvidos no Brasil. Embora existam diversasdiferencas entre os dois, busca-se apresentar neste item, deforma generica, como a analise de pavimentos de edifıcios efeita por estes programas segundo as prescricoes da norma deconcreto.
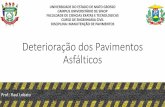
Os dois sistemas utilizam na analise de pavimentos ometodo de analogia por grelha, sendo as vigas discretizadasem barras e as lajes em uma grelha com faixas ortogo-nais. A analise das lajes por analogia de grelha pressupoea subdivisao da laje em faixas, cujas propriedades fısicas egeometricas passam a ser representadas atraves de um reticu-lado de barras que compoem uma grelha, conforma ilustradona figura 1.
A malha da grelhae gerada automaticamente pelo pro-grama. No caso das lajes macicas, cabe ao usuario definir oespacamento entre as barras nas duas direcoes e a direcao damalha, sendo possıvel discretizar uma laje com espacamentodiferente das demais. A montagem da grelhae feita a partir dadelimitacao do contorno e do espacamento entre barras. Paraas lajes que contem nervuras, o espacamento da grelha corre-sponde ao espacamento e posicao das nervuras, de maneira aaproximar o modelo de calculo daquilo que sera construıdo.
Nos casos em que a largura da viga engloba barras dagrelha paralelasa barra da viga, o programa ajusta a rigidezda viga para que nao haja superposicao de rigidezes entre aviga e a laje. Os criterios utilizados nesse ajuste de rigidez saoos seguintes: considera-se oangulo relativo entre as barras dagrelha e da viga na composicao da rigidez da grelha; o calculodas inercias da viga e das lajes considera a posicao dos re-spectivos centros geometricos em relacao a elevacao relativa
Mostra PROPEEs UFMG, 29 e 30 de Abril de 20133

Peres, L. M.; Pitangueira, R. L. S.
Figura 1: Analogia de Grelha.
entre lajes e vigas; a inercia corrigida da viga nao sera infe-rior a inercia de uma barra isolada da grelha e nem superiorainercia da viga em relacao ao seu centro geometrico.
A partir da montagem da grelha, os esforcos elasticos saoobtidos a partir da rigidez inicial, determinada apenas pelasecao bruta de concreto, desprezando-se a fissuracao e apresenca de armadura. Com esses esforcos, calculam-se ascombinacoes no estado limiteultimo e dimensionam-se as vi-gas e lajes de cada pavimento.
Com os esforcos elasticos e com as armaduras calculadas,obtem-se a rigidez equivalente (EIeq) e um modelo de grelhaexatamente igual ao modelo elastico, mas onde a rigidez decada barrae alterada para sua rigidez equivalente,e calcu-lado. Efetua-se a analise desse modelo, obtendo um novoconjunto de esforcos e deslocamentos. Os deslocamentosobtidos fornecem as flechas imediatas em cada ponto.
Pode-se facilmente perceber que, uma vez alterada arigidez do modelo e efetuada nova analise, obtem-se nao ape-nas deslocamentos em servico, mas tambem um novo con-junto de esforcos internos em servico, que deve ser difer-ente dos esforcos estimados atraves do modelo elastico ini-cial. Com isso, pode-se obter um resultado mais preciso derigidez equivalente, calculado em funcao dos momentos fle-tores em servico. Como a rigidez equivalentee funcao dosmomentos fletores e esses sao obtidos apos a analise do mo-delo que considera fissuracao,e necessario um procedimentoiterativo para se chegara solucao final.
Para cada laje,e determinada a flecha maxima no modelofissurado. Compara-se cada valor com a flecha obtida como modelo anterior (inicialmente, com a flecha elastica). Senenhuma diferenca for superior a um limite estabelecido, oprocessamentoe finalizado e os valores obtidos definem asflechas imediatas. Caso contrario, obtem-se uma nova rigidez
equivalente, a partir da media dos esforcos obtidos nas duasultimas iteracoes e refaz-se a analise. Compara-se novamenteos valores de flecha maxima com os da iteracao anterior erepete-se o procedimento ate ser atingida a precisao mınimaou o numero maximo de iteracoes.
Alguns tipos de lajes, contudo, nao sao adequadamenteanalisados por este metodo. O que ocorree que este metodo,por utilizar uma malha ortogonal na qual todas as faixaspossuem o mesmo espacamento entre si, nao analisa corre-tamente concentracoes de tensao elevadas que ocorram empontos da laje. Estas concentracoes ocorrem para lajes forte-mente convexas, as quais merecem uma analise pessoal maiscuidadosa, ao inves do detalhamento automatico gerado peloprograma.
3 RECURSOS COMPUTACIONAISDO INSANE
O INSANE e um programa destinado a analise de estru-turas por meio de modelos discretos, dentre estes os doMEF. Seu ambiente computacionale constituıdo de tresgrandes aplicacoes: pre-processador, processador e pos-processador, todas implementadas em linguagem JAVA. Opre e o pos-processador sao aplicacoes graficas interativasque disponibilizam, respectivamente, ferramentas de pre epos-processamento de diferentes modelos discretos. O pro-cessadore a aplicacao que representa o nucleo numerico dosistema ee a responsavel pela obtencao dos resultados dediferentes modelos discretos de analise estrutural. Cada umadestas aplicacoese implementada segundo o paradigma deprogramacao orientada a objetos.
Diversas possibilidades para tratar o comportamento con-stitutivo nao-linear de estruturas de concreto com modelosunidimensionais tem sido estudadas e desenvolvidas, segundoduas vertentes principais: os modelos que usam relacoesmomento curvatura, considerando secoes transversais ho-mogeneas, e os modelos que usam leis tensao-deformacao,decompondo as secoes transversais. Nos modelos da primeiravertente, a analise nao linear pode ser conduzida por meio derelacoes momento curvatura, validas para as secoes transver-sais, assim consideradas homogeneas. A necessidade deprescricao de relacoes momento curvatura representativas dasdiversas secoes transversais do modeloe uma desvantagemconsideravel deste enfoque (PENNA, 2011).
A analise nao linear de estruturas de concreto armado,usando-se elementos unidimensionais, tambem pode ser feitapela decomposicao do domınio da secao transversal. Fon-seca (2006) apresentou modelos para elementos finitos unidi-mensionais de portico espacial, segundo as teorias de Euler-Benoulli e Timoshenko. Para uma secao composta de variosmateriais, distribuıdos ao longo de umaarea de geometriaqualquer,e possıvel simplificar a integracao dos esforcos aolongo da secao decompondo-a em pequenasareas (Galgoul
4Mostra PROPEEs UFMG, 29 e 30 de Abril de 2013

Analise Nao-Linear de Pavimentos de Edifıcios de Concreto Armado Atraves do Metodo dos Elementos Finitos
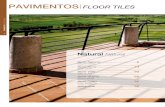
(1979), Sfakianakis (2001), Romero et al. (2002)), comona figura 2. Este tipo de aproximacao permite que, a partirdo monitoramento das tensoes e deformacoes em cada umadestasareas, se aproxime a resposta da secao transversal pelasoma de suas contribuicoes.
Figura 2: Decomposicao da secao transversal (FONSECA,2006).
Para a modelagem de placas de concreto armadoenecessario a decomposicao em camadas da espessura daplaca. A figura 3 ilustra este processo.
Figura 3: Decomposicao da espessura da placa em camadas(PENNA, 2011).
Ao se discretizar a placa ao longo da espessura,e possıvelobter a variacao do estado de tensao e deformacao ao
longo da altura da placa, permitindo assim, captar o pro-cesso de dano do material. Portanto, para uma analisenao-linear, cada camada deve ser analisada separadamente,de forma que a degradacao da rigidez seja computada e aobtencao dos esforcos internos seja resultante do somatoriodas contribuicoes das camadas, possibilitando o equilıbrio noprocesso de convergencia (PENNA, 2011).
Os Recursos do programa para a analise fisicamente naolinear de pavimentos de edifıcios sao detalhados a seguir.
3.1 Metodos Incrementais-Iterativos
Em problemas de analise nao lineare necessario resolver umsistema com N+1 incognitas, sendo N deslocamentos incre-mentais e um incremento no fator de carga, e N+1 equacoes,sendo N equacoes de equilıbrio e uma equacao de restricao.Para obter a solucao desse sistemae necessario utilizar umprocesso incremental-iterativo.
O metodo de Newton-Raphson Padrao pressupoe que a ma-triz de rigidez tangentee recalculada a cada iteracao. Nestecaso, a equacao de equilıbrio incremental (1) correspondentea iteracaoj do passoi pode ser escrita da seguinte forma:
[K]ij−1 · [δU ]ij = δλij · {P}+ {Q}i
j−1 (1)
onde,[K]ij−1 e a matriz de rigidez tangente na iteracaoj − 1 do
passoi , funcao do campo de deslocamentos[U ]ij−1;{δU}i
j e o vetor deslocamentos incrementais da iteracaojdo passoi ;
δλij e o incremento do fator de cargas na iteracaoj do passo
i ;{P} e o vetor de cargas de referencia;{K}i
j−1 e o vetor de forcas residuais da iteracaoj − 1 dopassoi .
Primeiramente, um valor para o incremento do fator decarga,δλj , e estabelecido em funcao do parametro de con-trole, assim pode-se obter{δU}j e decompo-lo nas parcelasassociadasa carga de referencia{δU}P
j e a carga residual
{δU}Qj , na forma:
{δU}j = δλj · {δU}Pj + {δU}Q
j (2)
com
[K]j−1 · {δU}Pj = {P} (3)
e
[K]j−1 · {δU}Qj = {Q}j−1 (4)
Ao final de cada iteracao, a convergenciae verificada pormeio da magnitude do vetor de foras residuais{Q}j e/ou damagnitude do vetor de deslocamentos iterativos{δU}j . O
Mostra PROPEEs UFMG, 29 e 30 de Abril de 20135

Peres, L. M.; Pitangueira, R. L. S.
processo iterativo continua ate que um determinado criteriode convergencia seja atendido. Caso seja necessaria uma novaiteracao, apos calculados{δU}P
j e {δU}Qj com as equacoes
3 e 4, o valor deδλj deve ser obtido com uma equacao derestricao que envolve combinacoes das grandezas do prob-lema.
A atualizacao das variaveise feita da seguinte forma:
λj = λj−1 + δλj (5)
{U}j = {U}j−1 + δU j (6)
O vetor de cargas residuais da iteracao j e dado por:
{Q}j = λj · {P} − {F}j , (7)
onde{F}j e o vetor de forcas equivalentesas tensoes internasao final da iteracaoj . Na primeira iteracao de cada passo, ovetor de cargas residuais{Q}j−1 e nulo.
O diagrama da figura 4 mostra os principais passos do al-goritmo generico proposto por Yang e Shieh (1990). O pro-cedimento em destaque refere-sea obtencao do parametro decarga, que depende do metodo de controle adotado.
Essa formulacao e bastante generica e se aplica a variosmetodos de controle, bastando que se redefina a equacao derestricao, porem, dentre os metodos descritos no texto, o decontrole do resıduo ortogonal exige algumas modificacoesnesse algoritmo.
3.1.1 Controle de Carga
Neste metodo a carga externae incrementada de um valorconstante na primeira iteracao de cada passo(j = 1). Paraas demais iteracoes(j > 1), dentro de um mesmo passo, ocarregamento externoe constante, ou seja, o incremento decargae igual a zero. A variavel δλj pode ser obtida pelaequacao 8.
δλj ={
Constante, para j = 10, para j > 1.
(8)
A figura 5 apresenta um esquema do processo iterativodeste metodo.
Como as iteracoes sao processadasa carga constante, autilizacao deste metodo falha na passagem por pontos lim-ites de carga, ou seja, quando a carga externa ultrapassa ovalor correspondente a um ponto limite (ponto B na figura5), a linha horizontal que controla a trajetoria de iteracao naocruza a trajetoria de equilıbrio, logo nenhum ponto de con-vergencia pode ser obtido. A instabilidade numerica ocorreproximo aos pontos limites.
3.1.2 Controle Direto de Deslocamento
Este metodo (BATOZ; DHAT, 1979) supoe que as iteracoessao processadas a um deslocamento constante. O incremento
Figura 4: Diagrama do algoritmo generico para metodos decontrole (FUINA, 2009).
de deslocamentos para a componente k,δUkj , e dado pela
equacao 9.
δUkj =
{Constante, para j = 10, para j > 1.
(9)
Substituindo o vetor de deslocamentos incrementais porsua componente k na equacao {δUj} = δλj · {δUP
j } +{δUP
j }, tem-se a equacao 10.
δλj =δUk
j − δUQk
j
δUP k
j
(10)
Na primeira iteracao de cada passo o vetor de cargas resid-uais({Q}j−1) e nulo, logo, os deslocamentos a ele associa-
dos{δUQk
j } tambem sao nulos, conforme a equacao 4. Sendoassim, na primeira iteracao, a equacao 9 pode ser escrita con-forme apresentado na equacao 11.
δλj =δUk
j
δUP k
j
, paraj = 1. (11)
Nas demais iteracoes(j > 1), δUkj e nulo, conforme a
equacao 9 e o incremento de cargas proporcionais pode serescrito como na equacao 12.
6Mostra PROPEEs UFMG, 29 e 30 de Abril de 2013

Analise Nao-Linear de Pavimentos de Edifıcios de Concreto Armado Atraves do Metodo dos Elementos Finitos
Fato
r de
Car
ga
Deslocamento
Trajetória deEquilíbrio
Trajetória deIteração
Figura 5: Processo incremental-iterativo com controle decarga (FUINA, 2009).
δλj =δUk
j
δUQk
j
, paraj > 1. (12)
A figura 6 ilustra o procedimento iterativo deste metodo.A grande desvantagem deste metodoe a necessidade de
conhecimento previo da estrutura a ser analisada para que sepossa escolher o grau de liberdade adequado a ser usado parao controle, dessa forma a experiencia do usuario contribuipara resolver o problema. Alem disso, assim como no metodode controle de carga, que nao permite a passagem por pontoslimites de carga, o controle direto de deslocamentoe inefi-ciente se o deslocamento de controle experimenta diminuicao(snap − back) de um nıvel de carga para outro. Isto se deveao fato da trajetoria de iteracao, controlada por uma linha ver-tical, nunca cruzar a trajetoria de equilıbrio.
3.1.3 Controle de Comprimento de Arco
Nos metodos de comprimento de arco, o processo iterativoecontrolado por uma combinacao geometrica entre as variaveisdeslocamentos e fator de carga proporcional. A figura 7 ilus-tra o procedimento para a obtencao do ponto de equilıbrio B,a partir do ponto de equilıbrio A (FUINA, 2009).
Para estes metodos, definindo o ponto inicial da trajetoriade iteracao (ponto B’ da figura 7), a combinacao apresentadana equacao 13 precisa ser controlada na primeira iteracao.
{δU}T1 · {δU}1 + δλ1 · δλ1 = ∆S2, (13)
onde∆S e uma constante a ser controlada.
Deslocamento
Fato
r de
Car
ga
EquilíbrioTrajetória de
IteraçãoTrajetória de
Figura 6: Processo incremental-iterativo com controle diretode deslocamento (FUINA, 2009).
No inıcio de cada passo (j = 1), {Q}j−1 = {0}, pois naoexistem forcas residuais. Pela equacao 4, o vetor de desloca-mentos{δU}Q
1 tambeme nulo.O vetor de deslocamentos incrementais para a primeira
iteracao pode ser obtido da equacao 2 como mostrado naequacao 14.
{δU}1 = δλ1 · {δU}P1 (14)
O vetor de deslocamentos incrementais acumuladose dadopor 15.
{∆U}j = {∆U}j−1 + {δU}j . (15)
Logo, a equacao 14 pode ser escrita na forma apresentadaem 16.
{∆U}1 = δλ1 · {δU}P1 , (16)
uma vez que{∆U} e nulo no inıcio do passo.Substituindo o resultado de 14 na equacao 13, obtem-se o
fator de carga proporcional para a primeira iteracao em 17.
δλ1 = ± ∆S√{δU}P T
1 · {δU}P1 + 1.0
, para j = 1 (17)
Conforme pode-se observar, o sinal do fator de cargae in-determinado, sendo necessario outras informacoes adicionaisao processo. Dessa forma,e comum o uso dos pivots da ma-triz de rigidez para definir-se sobre o incremento ou decre-mento das cargas externas, uma vez que estes servem comoindicadores da mudanca da positividade da referida matriz(FUINA, 2009). Porem, em algumas situacoes, onde ocorrem
Mostra PROPEEs UFMG, 29 e 30 de Abril de 20137

Peres, L. M.; Pitangueira, R. L. S.
Deslocamento
Fato
r de
Car
ga
EquilíbrioTrajetória de
IteraçãoTrajetória de
Figura 7: Processo incremental-iterativo com controle decomprimento de arco (FUINA, 2009).
mudancas acentuadas na direcao da trajetoria de equilıbrio,o sinal escolhido pode nao resultar na correta descricao datrajetoria.
Um outro metodo para a escolha do sinal, propostopor Feng, Peric e Owen (1996), estabelece um criteriono qual o sinal do fator de carga da primeira iteracao dequalquer passo incremental coincide com o sinal do pro-duto interno entre o deslocamento incremental convergidono passo anterior,{∆U}i−1, e o deslocamento da primeiraiteracao do passo atual devidoa carga de referencia,{δU}iP
1 .Assim,pode-se escrever a equacao 18.
sinal(δλi1) = sinal({∆U}i−1 · {δU}iP
1 ) (18)
Neste criterio, o valor de{∆U}i−1 traz informacoes dohistorico da trajetoria de equilıbrio atual. Dessa forma, o sinalpositivo do produto{∆U}i−1 · {δU}iP
1 indica que o fator decarga esta crescendo e, portanto, deve assumir valor positivo(figura 8(a)). O sinal negativo indica que o fator de carga estadecrescendo e, portanto, deve assumir valor negativo (figura8(b)).
Figura 8: Direcao da trajetoria de equilıbrio (FUINA, 2009).
O metodo de comprimento de arco geralmentee utilizado
desprezando-se a unidade em presenca do produto escalar en-tre os vetores de deslocamentos no denominador da equacao17, pois este nao possui unidades fısicas consistentes, resul-tando na equacao 19.
δλ1 =∆S
δUPT1 · δUP
1
, paraj = 1 (19)
Atraves da equacao 19 pode-se definir o ponto inicialda trajetoria de iteracao, que deve ser percorrida(j > 1)impondo-se restricoesa sua forma. Assim, algumas possi-bilidades para o metodo de comprimento de arco sao apre-sentadas a seguir.
3.1.4 Trajetoria de Iteracao Ortogonal a Tangente Ini-cial
Este metodo (RICKS, 1972, 1979) mantem a trajetoria deiteracao sempre ortogonala tangente inicial em cada passo.Assim, o produto escalar dos vetores({∆U}1,∆λ1) e({δU}j , δλj) deve se anular de acordo com a equacao 20.
({∆U}1,∆λ1) · ({∆U}j ,∆λj) = 0 (20)
A figura 9 ilustra o procedimento iterativo deste metodo.
Deslocamento
Fato
r de
Car
ga
EquilíbrioTrajetória de
IteraçãoTrajetória de
Figura 9: Comprimento de arco com trajetoria de iteracaoortogonala tangente inicial (FUINA, 2009).
Desenvolvendo a equacao 20 chega-se a equacao 21:
{∆U}1 · {δU}j + ∆λ1 · δλ1 = 0, (21)
e substituindo{δU}j pela expressao dada em 2 obtem-se aequacao 22:
8Mostra PROPEEs UFMG, 29 e 30 de Abril de 2013

Analise Nao-Linear de Pavimentos de Edifıcios de Concreto Armado Atraves do Metodo dos Elementos Finitos
{∆U}1 · (δλj · {δU}Pj + {δU}Q
j ) + ∆λ1 · δλj = 0, (22)
resultando na equacao 23
δλj = −{∆U}T
1 · {δU}Qj
{∆U}T1 · {δU}P
j + ∆λ1. (23)
Desprezando-se∆λ1, em presenca do produto escalar{∆U}T
1 · {δU}pj , obtem-se a equacao 24:
δλj = −{∆U}T
1 · {δU}Qj
{∆U}T1 · {δU}P
j
, paraj > 1. (24)
3.1.5 Trajetoria de Iteracao Ortogonal a Tangente daIteracao Anterior
Este metodo (RAMM , 1981) mantem a trajetoria de iteracaosempre ortogonala tangente da iteracao anterior. As-sim, o produto escalar dos vetores({∆U}j−1,∆λj−1) e({δU}j , δλj) deve ser nulo de acordo com a equacao 25.
({∆U}j−1,∆λj−1) · ({∆U}j ,∆λj) = 0 (25)
Desenvolvendo 25, substituindo{δU}j pela expressaodada em 2 e adotando a mesma simplificacao anterior, obtem-se a equacao 26:
δλj = −{∆U}T
j−1 · {δU}Qj
{∆U}Tj−1 · {δU}P
j
, paraj > 1 (26)
A figura 10 mostra este procedimento.
Deslocamento
Fato
r de
Car
ga
EquilíbrioTrajetória de
IteraçãoTrajetória de
Figura 10: Comprimento de arco com trajetoria de iteracaoortogonala tangente inicial (FUINA, 2009).
3.1.6 Trajetoria Cil ındrica
Este metodo (CRISFIELD, 1981, 1983) controla a norma dosdeslocamentos incrementais dada pela equacao 27.
{∆U}Tj · {∆U}j = ∆S2 (27)
A incognita δλj e dada pela solucao da equacao do se-gundo grau obtida pela substituicao de{δU}j pela expressaodada em 2 na equacao 15 e do resultado na equacao 27. Aescolha da raiz da referida equacao de segundo grau a seradotadae feita baseando-se noangulo formado entre os ve-tores de deslocamentos incrementais dasultimas iteracoes({∆U}j−1 e{∆U}j) e na proximidade da raiz com a solucaolinear da equacao de segundo grau (CRISFIELD, 1981).
A figura 11 apresenta um esquema do processo iterativodeste metodo
Deslocamento
Fato
r de
Car
ga
EquilíbrioTrajetória de
IteraçãoTrajetória de
Figura 11: Comprimento de arco com trajetoria de iteracaocilındrica (FUINA, 2009).
3.1.7 Controle de Deslocamento Generalizado
Este metodo, proposto por Yang e Shieh (1990), tem comoobjetivo automatizar o ajuste do tamanho do passo incre-mental, pelo acompanhamento da variacao da rigidez, ea troca do sinal do incremento de carga proporcional naocorrencia de pontos limites. Assim, os autores propuseramrelacionar deslocamentos incrementais em dois passos suces-sivos, utilizando-se a expressao 28 para o fator de carga pro-porcional.
δλj =Hj − δλ1 · {δU}P,i−1T
1 · {δU}Q,ij
δλ1 · {δU}P,i−1T
1 · {δU}P,ij
. (28)
onde{δU}p,i−11 e o incremento de deslocamento resultante
da primeira iteracao doultimo passo incremental eHj podeser interpretado como um deslocamento generalizado.
Mostra PROPEEs UFMG, 29 e 30 de Abril de 20139

Peres, L. M.; Pitangueira, R. L. S.
Na primeira iteracao (j = 1), um vez que{δU}Qj e nulo,
δλ1 pode ser escrito de acordo com a equacao 29.
δλ1 =(
H1
{δU}P,i−1T
1 ·δUP,i1
)0.5
, paraj = 1. (29)
Para as demais iteracoes,Hj deve se anular para garan-tir o controle estabelecido na primeira iteracao. Assim, daequacao 28 tem-se a equacao 30.
δλj ={δU}P,i−1T
1 · {δU}Q,ij
{δU}P,i−1T
1 · {δU}P,ij
, (30)
No primeiro passo incremental, toma-se{δU}P,01 =
{δU}P,11 e substituindo em 29 obtem-se a equacao 31.
H1 = (δλ11)
2δUP,1T
1 · {δU}P,11 (31)
Para a primeira iteracao de um passo generico, o incre-mento do fator de carga pode ser obtido substituindo-se 31em 30, mostrado na equacao 32
δλ1 = δλ11
({δU}P,1T
1 ·{δU}P,11
{δU}P,i−1T
1 ·{δU}P,i1
)0.5
, paraj = 1 (32)
O termo entre parenteses em 32e definido pelos autorescomo um parametro de rigidez generalizado (GSP), de modoque o incremento no fator de carga, para a primeira iteracaode um passo generico pode se descrito pela equacao 33.
δλ1 = ±δλ11‖GSP‖0.5 (33)
O GSP, como definido em 33, possui duas caracterısticasimportantes:
1. O numerador e o denominador da expressao doparametro de rigidez generalizado representam, respectiva-mente, os deslocamentos no primeiro passo e, aproximada-mente, os deslocamentos no passo corrente. Assim, o GSPe representativo da variacao da rigidez da estrutura e seu usotorna automatico o ajuste do tamanho do passo incremental;
2. O valor do GSPe negativo somente proximo de pontoslimites, pois seu sinal depende somente do produto escalar
{δU}P,i−1T
1 ·{δU}P,i1 . Assim, o parametro, por si so, fornece
a indicacao da mudanca no sinal do incremento de carga.
3.1.8 Controle por Trabalho
O metodo de controle por trabalho proposto por Yang eMcGuire (1985) se baseia na equacao de restricao dada em34.
{δU}Tj (δλj{P}) = ∆W, (34)
onde o incremento de trabalho∆W e definido pela equacao35.
∆W ={
Constante, para j = 10, para j > 1.
(35)
Para a primeira iteracao (j=1), o incremento no fator decargaδλ1 e determinado com base no incremento de trabalhoconstante∆W .
Se{Q}j−1 = {0} e {δU}Q1 = {0} paraj = 1, pode-se
utilizar a equacao 14, substituindo-a na equacao 34 para obtero incremento do fator de cargaδλ1 mostrado na equacao 36
δλ = ±
√∆W
{δU}PT1
· {P}, paraj = 1 (36)
Assim como no controle de comprimento de arco, aequacao acima possui um sinal indeterminado e, novamente,faz-se o uso dos pivots da matriz de rigidez para definir sobreo incremento ou decremento das cargas externas.
Para as demais iteracoes(j > 1) o incremento de trabalhoe nulo. Portanto,
{δU}Tj (δλjP ) = 0. (37)
Substituindo a equacao 2 na equacao 37, tem-se a equacao38.
δλj = −{δU}QT
j · P{δU}PT
j · P, paraj > 1 (38)
3.1.9 Controle de Resıduo Ortogonal
No controle de resıduo ortogonal, proposto por Krenk eHededal (1993) e Krenk (1995), o fator de carga para aprimeira iteracao(∆λ1 = δλ1) de cada passoe incrementadode um valor constante e o vetor deslocamentos incrementaise obtido pela equacao 39.
[K]0 · {∆U}1 = δλ1 · {P} (39)
Nas demais iteracoes(j > 1), o nıvel de cargae ajustadopor um fator(ξ). Este fator oferece um melhor ajuste dasforcas internas, de modo que o vetor de forcas residuaiseescrito conforme a equacao 40.
{Q}j = {Q}j + ξj · (δλ1 · {P}), (40)
onde{Q} e dado por{Q}j = λj ·P −{F}j (ver equacao 7).Como em problemas nao-lineares o vetor de forcas resid-
uais nao e nulo, esse induzira a deslocamentos adicionais.A magnitude do deslocamento incremental sera entao au-mentada ou diminuıda de acordo com o sinal do produto{Q}T
j · {∆U}j , isto e, o sinal da projecao da forca residualna direcao do deslocamento incremental corrente. A escolhado deslocamento incremental correntee entao otimizada soba condicao descrita pela equacao 41.
10Mostra PROPEEs UFMG, 29 e 30 de Abril de 2013

Analise Nao-Linear de Pavimentos de Edifıcios de Concreto Armado Atraves do Metodo dos Elementos Finitos
{Q}Tj ·∆U j = 0 (41)
Substituindo a forca residual da equacao 40 na condicao deortogonalidade anterior, chega-se ao fator de escala(ξ) dadopela equacao 42.
ξj = −{Q}T
j · {∆U}j
δλ1{P} · {∆U}j(42)
Determinado o fator{ξ} pode-se obter o vetor de forcasresiduais{Q} pela equacao 40. Conhecendo este vetor,avaliam-se os deslocamentos iterativos utilizando-se a ex-pressao dada por 43.
[K]j−1 · {δU}j = {Q}j (43)
A expressao para o calculo do incremento de carga para asiteracoes(j > 1) e dada por 44 ou 45
δλj = δλ1 ·(− {Q}T
j ·{∆U}j
δλ1P T ·{∆U}j
)(44)
δλj = δλ1 · ξj (45)
No final de cada iteracao, atualizam-se os incrementos dedeslocamento e o fator de carga, respectivamente, utilizando-se as equacoes 46 e 47.
{∆U}j = {∆U}j−1 + {δU}j (46)
λj = λj−1 + ξj∆λ1 (47)
As seguintes observacoes podem ser feitas:
1. Se‖∆U1 > Umax entao ∆U1 = Umax
‖∆U1∆U1, pois
proximo aos pontos limites a rigidez pode ser muito pequena,sendo assim,e conveniente impor um limite maximoa mag-nitude do incremento de deslocamento;
2. Se∆UT0 · ∆U1 < 0 entao∆U1 = −∆U1 e ∆λ1, onde
∆U0 = ∆Uj no fim de cada passo. Assim, assegura-se quea trajetoria de equilıbrio sera percorrida corretamente mesmose houver uma reversao do deslocamento;
3. Se‖∆Uj > Umax entao∆Uj = Umax
‖∆Uj∆Uj , novamente
evita-se que a rigidez muito pequena divirja o processo.
Os itens 1 e 3 sao semelhantes ao uso dos pivots da matrizde rigidez mencionado no controle de comprimento de arco eno controle por trabalho. A figura 12 mostra o procedimento.
3.1.10 Resumo
A figura 13 apresenta os parametros de carga obtidos paracada metodo de controle das iteracoesj = 1 e j > 1 (partedestacada no diagrama da figura 4).
Fato
r de
Car
ga
Deslocamento
1 1
0 1
Trajetória deEquilíbrio
Figura 12: Processo incremental-iterativo com controle deresıduo ortogonal (FUINA, 2009).
3.2 Elementos Finitos de Portico Espacial
Um portico espaciale o tipo mais geral de estrutura retic-ulada, no que diz respeito tanto a geometria quanto a car-gas. A figura 14 mostra uma barra, de comprimentol esecao transversal deareaA, orientada de maneira arbitrariano espaco. A orientacao de seu sistema local de coordenadase de tal forma que os planosxy exz sao os planos principaisde flexao. Considera-se que a secao transversal tem dois eixoscoincidentes com os eixos locaisy ez, de modo que a flexao ea torcao tomem lugar independentemente uma da outra. Umabarra tıpica de portico espacial pode suportar forcas axiais,forcas cortantes nas direcoes principais, momentos de torcaoe momentos fletores nas direcoes principais. Um ponto qual-quer do eixo da barra pode ter ate seis deslocamentos, sendotres translacoes (wx, wy ewz) e tres rotacoes (θx, θy, θz ).
Portanto, na analise de um portico espacial, consideram-se deformacoes axiais, deformacoes devidoa flexao e de-vido a torcao. As deformacoes devido aos esforcos cor-tantes muitas vezes sao desprezadas, mas podem ser signi-ficativas e devem ser incluıdas na analise de tais estruturas,quando necessario. A incorporacao dos efeitos relaciona-dos ao cisalhamento pode ser feita atraves da consideracaoda teoria de flexao de vigas de Timoshenko, a qual incluiuma aproximacao para a distorcao da secao transversal de-vido aos esforcos cortantes. Esforcos estes desprezados nateoria classica de flexao de vigas esbeltas de Euler-Bernoulli.
Para um portico espacial considerando a teoria de Timo-shenko sao adotadas as seguintes hipoteses:
1. Secoes transversais normais ao eixo da barra antes da
Mostra PROPEEs UFMG, 29 e 30 de Abril de 201311

Peres, L. M.; Pitangueira, R. L. S.
MÉTODOS DE CONTROLE δλ para j=1 δλ para j>1
Controle de Carga =δλ1 constante =δλ j 0
Controle Direto de Deslocamento kP
1
k1
1UU
δ
δ=δλ
kPj
kQj
jU
U
δ
δ−=δλ
Trajetória de iteração ortogonal à tangente inicial:
{ } { }{ } { }P
jT1
Qj
T1
j UU
UU
δ⋅∆
δ⋅∆−=δλ
Trajetória de iteração ortogonal à tangente da iteração anterior:
{ } { }{ } { }P
jT
1j
Qj
T1j
j UUUUδ⋅∆
δ⋅∆−=δλ
−
−
Controle de Comprimento de Arco { } { }P
1
TP1
1
UU
S
δ⋅δ
∆±=δλ
Trajetória cilíndrica: equação do 2º grau que permite obter jδλ ( ver item 5.2.3.3 ).
Controle de Deslocamento Generalizado
{ } { }{ } { }
5,0
i,P1
T1i,P1
1,P1
T1,P11
11UU
UU
δ⋅δ
δ⋅δδλ=δλ
−
{ } { }{ } { } i,P
j
T1i,P1
i,Qj
T1i,P1
jUU
UU
δ⋅δ
δ⋅δ−=δλ
−
−
Controle por Trabalho { } { }PU
WTP
1
1δ
∆±=δλ { } { }
{ } { }PU
PUTP
j
TQj
jδ
δ−=δλ
Método do Resíduo Ortogonal =δλ1 ±constante { } { }{ } { }
∆⋅δλ
∆⋅−δλ=δλ
jT
1
j
T
j1j
UP
UQ~
Figura 13: Parametros de carga obtidos para os metodos decontrole (FUINA, 2009).
flexao, permanecem planas, mas nao permanecem necessari-amente ortogonais a tal eixo, depois da flexao;
2. A barra suporta deformacao axial, deformacoes devidoao cisalhamento nas duas direcoes principais, deformacao de-vido a torcao e deformacoes devidoa flexao nas duas direcoesprincipais;
3. Admite-se constante a distribuicao de tensoes tangenci-ais ao longo da secao transversal, porem modificada por umfator de correcao de cisalhamento da secao, de maneira que otrabalho da deformacao tangencial constante coincida com otrabalho da deformacao exata.
4. Existe uma completa interacao entre os varios materiaisda barra na secao transversal. As deformacoes nas interfacesdos materiais sao consideradas compatıveis.
Para um portico espacial considerando a teoria de Euler-Bernoulli, assumem-se as seguintes hipoteses:
1. Secoes transversais normais ao eixo da barra antes daflexao, permanecem planas e ortogonais a tal eixo depois daflexao;
Figura 14: Sistema de coordenadas e deslocamentos de umabarra de portico espacial (FONSECA, 2006).
2. A barra suporta deformacao axial, deformacao devidoa torcao, e deformacoes devidoa flexao nas duas direcoesprincipais;
Estas diferem das hipoteses feitas para a teoria de Tim-oshenko quantoa ortogonalidade das secoes e quantoaconsideracao de deformacoes de cisalhamento. Portanto, naoha necessidade de uma hipotese equivalentea hipotese (3)feita para aquela teoria. Assume-se ainda como valida ahipotese (4).
De maneira a demonstrar tais recuros no INSANE, citadosanteriormente, para a analise fisicametne nao linear, sao ap-resentados dois problemas: um portico espacial de concretoarmado e uma viga de concreto.
Primeiramentee mostrado o portico espacial de concretoarmado modelado por Fonseca (2006). A figura 15 apre-senta os detalhes geometricos do modelo bem como o car-regamento e as condicoes de contorno.
A malha com 80 elementos finitos, unidimensionais de doisnos, baseados na teoria de Bernoulli-Eulere detalhada nafigura 16
Para a analise nao linear, foi utilizado o metodo de controledireto de deslocamento. A figura 17 apresenta o grafico datrajetoria de equilıbrio para o deslocamento de controle.
No segundo exemplo, a viga ilustrada na figura 18 foi mod-elada por Penna (2011) e analisada com dois modelos difer-entes: o primeiro, com elementos unidimensionais de doisnos, e o segundo, com elementos unidimensionais de tres nos,baseados na teoria de viga de Timoshenko.
A figura 19 apresenta as trajetorias de equilıbrio da extrem-idade do balanco.
12Mostra PROPEEs UFMG, 29 e 30 de Abril de 2013

Analise Nao-Linear de Pavimentos de Edifıcios de Concreto Armado Atraves do Metodo dos Elementos Finitos
Figura 15: Detalhes da geometria do portico espacial(PENNA, 2011).
3.3 Elementos Finitos de Placas
Placas sao elementos estruturais planos onde uma das tresdimensoes, a espessura,e muito menor que as outras duas.Geralmente, as placas sao submetidasa acoes que provo-cam flexao. Conforme Sorinao (2003) sua funcao principaletransmitir cargas agindo normalmentea mesma, como ocor-rem em lajes e pontes. As placas sao geometricamente repre-sentadas por seu plano medio, quee uma superfıcie equidis-tante dos dois planos que limitam a espessura.
O estudo das placas baseia-se na teoria de Kirchhoff,tambem conhecida como teoria classica, e na teoria deReissner-Mindlin. Estas teorias sao analogas as teo-rias de viga de Euler-Bernoulli e Timoshenko, respectiva-mente, entretanto no caso das placas sao utilizados modelosmatematicos bidimensionais. Elas diferem-se basicamente naidealizacao do esforco cisalhante, onde Kirchhoff desprezaeste efeito enquanto Reissner-Mindlin o considera atravesde uma distribuicao uniforme ao longo da espessura. Istofaz com que a teoria de Kirchhoff fique limitada ao estudo
Figura 16: Modelo de elementos finitos e deformada (PENNA,2011).
das placas finas enquanto que a teoria de Reissner-Mindlineaplicavel a placas de qualquer espessura.
A teoria de Kirchhoff, adequada para o estudo das pla-cas onde a razao entre a espessura e a menor dimensao dasuperfıcie media seja inferior a1/20, ou seja, adequada aoestudo de placas finas, adota as seguintes hipoteses simplifi-cadoras:
1. Os pontos contidos no plano medio somente se deslocamverticalmente, logo os deslocamentos horizontais (u, v) saoiguaisa zero;
2. Todos os pontos contidos numa reta normal ao planomedio tem o mesmo deslocamento vertical;
3. A tensao normal na direcaoz e desprezıvel;
4. Retas normais ao plano medio da placa indeformada per-manecem retas e normais ao plano medio apos a deformacaoda placa.
Assim como a teoria de Kirchhoff, a teoria de Reissner-Mindlin tambem esta fundamentada em quatro hipoteses sim-plificadoras, sendo as tres primeiras iguaisas de Kirchhoff,enquanto aultima, que se referea ortogonalidade da reta nor-mal ao plano medio, sofre alteracao:
1. Os pontos contidos no plano medio somente deslocamverticalmente, portanto tem-se os deslocamentos horizontais
Mostra PROPEEs UFMG, 29 e 30 de Abril de 201313

Peres, L. M.; Pitangueira, R. L. S.
Figura 17: Trajetoria de equilıbrio: Fator de carga× Deslo-camento horizontal (PENNA, 2011).
Figura 18: Detalhes da geometria da viga (PENNA, 2011).
(u, v) iguaisa zero;
2. Todos os pontos contidos numa reta normal ao planomedio tem o mesmo deslocamento vertical;
3. A tensao normal na direcao ze desprezıvel;
4. Retas normais ao plano medio da placa indeformada per-manecem retas, mas nao necessariamente normais ao planomedio, apos a deformacao da placa.
Os elementos finitos de placas do sistema INSANE, abaixolistados, foram implementados por Saliba (2007).
- Elementos Finitos para Placas Finas baseados na Teoriade Kirchhoff:
. Elemento Retangular de 4 Nos Nao - Conforme (MZC);
. Elemento Retangular de 4 Nos Conforme (BFS);
Figura 19: Trajetorias de equilıbrio da extremidade dobalanco (PENNA, 2011).
. Elemento Triangular de 3 Nos Nao - Conforme (CKZ);
. Elemento Triangular Conforme de Cowper;
- Elementos Finitos para Placas Finas baseados na Teoriade Reissner- Mindlin com Integracao Reduzida / Seletiva:
. Elemento Quadrilateral de 4 Nos (Q4);
. Elemento Quadrilateral de 8 Nos (Q8);
. Elemento Quadrilateral de 9 Nos (Q9);
. Elemento Quadrilateral Heterosis (Q9H);
- Elementos Finitos para Placas Finas baseados na Teoriade Reissner- Mindlin com Deformacao de Cisalhamento Im-posta:
. Elemento Quadrilateral de 4 Nos (RMCIQ4);
. Elemento Quadrilateral de 8 Nos (RMCIQ8);
. Elemento Quadrilateral de 9 Nos (RMCIQ9);
. Elemento Triangular de 6 Nos (RMCIT6);
Os exemplos a seguir ilustram os recursos do INSANE paraa analise fisicamente nao-linear de placas. No primeiro exem-plo foi modelado uma placa com elementos baseados na teo-ria de Kirchhoff e no segundo exemplo com elementos basea-dos na teoria Reissner-Mindlin.
No primeiro exemplo uma placa fina retangular foi mode-lada por Penna (2011) com 166 elementos finitos retangularesbaseados na teoria de Kirchhoff. A figura 20 apresenta os de-talhes do modelo e da malha de elementos finitos.
14Mostra PROPEEs UFMG, 29 e 30 de Abril de 2013

Analise Nao-Linear de Pavimentos de Edifıcios de Concreto Armado Atraves do Metodo dos Elementos Finitos
Figura 20: Modelo de placa de Kirchhoff (PENNA, 2011).
Para a obtencao das trajetorias de equilıbrio foi usado ometodo de controle de comprimento de arco cilındrico. Afigura 21 apresenta o grafico “Fator de carga× Desloca-mento” para o no central da malha.
No segundo exemplo uma placa anular com carga dis-tribuıda na borda interna foi modelada com elementos quadri-laterais de quatro nos segundo a teoria de placas de Reissner-Mindlin. Os detalhes do modelo estao especificados na figura22.
As trajetorias de equilıbrio foram obtidas com o metodode controle de deslocamentos generalizados. A trajetoria deequilıbrio do deslocamento vertical, de um dos pontos demaior deslocamento, pode ser vista na figura 23.
4 Proposta de Dissertacao
O objetivo principal do trabalho de dissertacao e analisarpavimentos de edifıcios de concreto armado mediante autilizacao do metodo dos elementos finitos e considerando anao-linearidade fısica. Sera feito uma analise linear e outra
Figura 21: Trajetoria de equilıbrio: Fator de carga× Deslo-camento (PENNA, 2011).
fisicamente nao-linear para lajes macicas e nervuradas paraos seguintes casos:
. Lajes apoiadas em vigas.
. Lajes apoiadas apenas sobre pilares.
. Lajes apoiadas em vigas no contorno e em pilares inter-nos.
Os resultados obtidos serao comparados com os obtidospor programas comerciais, como o Eberick e/ou TQS, quefazem a analise por analogia de grelha. Com isso busca-sefornecer conceitos que possam ser incluıdos na pratica deprojetos estruturais, visando interpretar de forma mais clararesultados obtidos por programas de elementos finitos.
Para a modelagem dos problemas sera utilizado o programaINSANE que possui todos os recursos para as analises que sedeseja fazer.
Para o desenvolvimento do trabalho, a revisao bibli-ografica sera inriquecida com publicacoes nacionais e inter-nacionais. Posteriormente, serao estudados os modelos con-stitutivos para representacao do comportamento do concretodisponıveis no programa INSANE, para, entao, dar inıcio amodelagem das estruturas.
Agradecimentos
Os autores agradecem o apoio financeiro em forma de fo-mentoa pesquisa concedido pela FAPEMIG (Fundacao deAmparo a Pesquisa do Estado de Minas Gerais) e pelaCAPES (Coordenacao de Aperfeicoamento de Pessoal deNıvel Superior).
Mostra PROPEEs UFMG, 29 e 30 de Abril de 201315

Peres, L. M.; Pitangueira, R. L. S.
Figura 22: Modelo de placa de Reissner-Mindlin (PENNA,2011).
ReferenciasALMEIDA, L. M. Elementos Finitos Parametricos Implementadosem java. Dissertacao (Mestrado) — Universidade Federal de MinasGerais, Belo Horizonte, MG, Brasil, 2005.
ARAuJO, J. M. de. Avaliacao dos procedimentos de projeto das la-jes nervuradas de concreto armado.Teoria e Pratica na EngenhariaCivil, v. 3, p. 31–42, 2003.
ASSOCIACAO BRASILEIRA DE NORMAS TECNICAS. Pro-jeto de estruturas de concreto - Procedimento: NBR 6118, Rio deJaneiro, 2007.
BANDEIRA, M. S. Analise Nao-Linear de Lajes de Concreto Ar-mado Pelo Metodo dos Elementos Finitos. Dissertacao (Mestrado)— Universidade Federal de Goias, Goiania, GO, Brasil, 2006.
BAPTISTA, S. M. Analise de Pavimentos de Edifıcios coma Utilizacao do Metodo dos Elementos Finitos. Dissertacao(Mestrado) — Universidade de Sao Paulo, Sao Carlos, SP, Brasil,Dezembro 1994.
BATOZ, J. L.; DHAT, G. Incremental displacement algorithms fornonlinear problems.International Journal for Numerical Methodsin Engineering, v. 14, p. 1262–1267, 1979.
Figura 23: Trajetoria de equilıbrio: Fator de carga× Deslo-camento vertical (PENNA, 2011).
CARVALHO, R. C.Analise Nao-Linear de Pavimentos de Edifıciosde Concreto atraves da Analogia de Grelha. Tese (Doutorado) —Universidade de Sao Paulo, Sao Carlos, SP, Brasil, Janeiro 1994.
CRISFIELD, M. A. A fast incremental-iteractive solution procedurethat handles snap-through.Computers & Structures, v. 13, p. 55–62,1981.
CRISFIELD, M. A. An arc length method including line searchesand acelerations.International Journal for Numerical Methods inEngineering, v. 19, p. 1269–1289, 1983.
FENG, Y. T.; PERIC, D.; OWEN, D. R. J. A new criterion for deter-mination of initial loading parameter in arc-length methods.Com-puter & Structures, v. 58, n. 3, p. 479–485, 1996.
FONSECA, M. T.Aplicacao Orientada a Objetos para Analise Fisi-camente Nao-Linear com Modelos Reticulados de Secoes Transver-sais Compostas. Dissertacao (Mestrado) — Universidade Federal deMinas Gerais, Belo Horizonte, MG, Brasil, Agosto 2006.
FUINA, J. S.Formulacoes de Modelos Constitutivos de Microplanospara Contınuos Generalizados. Tese (Doutorado) — UniversidadeFederal de Minas Gerais, Belo Horizonte, MG, Brasil, Abril 2009.
KIMURA, A. Informatica Aplicada em Estruturas de Concreto Ar-mado: calculo de edifıcios com o uso de sistemas computacionais.Sao Paulo: Pini, 2007.
KRENK, S. An orthogonal residual procedure for nonlinear finiteelement equations.International Journal for Numerical Methods inEngineering, v. 38, p. 823–839, 1995.
KRENK, S.; HEDEDAL, O. A dual orthogonality procedure fornonlinear finite element equations.Computer Methods in AppliedMechanics and Engineering, v. 123, p. 95–107, 1993.
PENNA, S. S. Formulacao Multipotencial para Modelos deDegradacao Elastica: Unificacao Teorica, Proposta de Novo Mo-delo, Implementacao Computacional e Modelagem de Estruturasde Concreto. Tese (Doutorado) — Universidade Federal de MinasGerais, Belo Horizonte, MG, Brasil, Novembro 2011.
PINTO, R. da S.; RAMALHO, M. A. Nao-linearidade fısica egeometrica no projeto de edifıcios usuais de concreto armado.Cadernos de Engenharia de Estruturas, v. 19, p. 171–206, 2002.
16Mostra PROPEEs UFMG, 29 e 30 de Abril de 2013

Analise Nao-Linear de Pavimentos de Edifıcios de Concreto Armado Atraves do Metodo dos Elementos Finitos
PITANGUEIRA, R. L. S. Introducao ao Metodo dos ElementosFinitos - Notas de Aula. Belo Horizonte: Departamento de Engen-haria de Estruturas da UFMG, 2000.
RAMM, E. Strategies for tracing the nonlinear response near limitpoints, in nonlinear finite element analysis in structural mechanics.Springer, Berlin, p. 63–83, 1981.
RICKS, E. The application of newton method to the problem of elas-tic stability.Journal of Applied Mechanics, p. 1060–1065, 1972.
RICKS, E. An incremental approach to the solution of snapping andbuckling problems.International Journal of Solids and Structures,v. 15, p. 529–551, 1979.
SALIBA, S. S.Implementacao Computacional e Analise Crıtica deElementos Finitos de Placa. Dissertacao (Mestrado) — Universi-dade Federal de Minas Gerais, Belo Horizonte, MG, Brasil, Abril2007.
SORINAO, H. L.Metodo dos Elementos Finitos em Analise de Es-truturas. Sao Paulo: EDUSP, 2003.
YANG, Y. B.; MCGUIRE, W. A work control method for geomet-rically nonlinear analysis.Proceedings of the International Confer-ence on Numerical Methods in Engineering:Theory and Applica-tion, p. 913–921, 1985.
YANG, Y. B.; SHIEH, M. S. Solution method for nonlinear prob-lems with multiple critical points.AIAA Journal, v. 28, n. 12, p.2110–2116, 1990.
Mostra PROPEEs UFMG, 29 e 30 de Abril de 201317