A otimização é o processo de · De 11 de março a 06 de maio de 2016 – prof. Lori Viali, Dr....
58
Transcript of A otimização é o processo de · De 11 de março a 06 de maio de 2016 – prof. Lori Viali, Dr....


M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
A otimização é o processo de
encontrar a melhor solução (ou
solução ótima) para um problema.
Existe um conjunto particular
de problemas nos quais é decisivo
a aplicação de um procedimento de
otimização.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Muitos processos podem se
beneficiar de uma alocação otimizada
de recursos. Esses recursos podem
incluir capital, equipamentos, tarefas,
e devem ser corretamente alocados nas
quantidades, nos tempos e na
seqüência para a obtenção do melhor
resultado possível.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
São problemas complexos, muitas
vezes de difícil solução e que envolvem
significativas reduções de custos,
melhorias de tempos de processos, ou
uma melhor alocação de recursos em
atividades.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
As técnicas de otimização devem
ser utilizadas quando não existe uma
solução simples e diretamente
calculável para o problema. Isso
geralmente ocorre quando a estrutura
do problema é complexa, ou existem
milhões de possíveis soluções.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
( )
( )
( )
( ) b ) ou ,( x...,xxg
... ............ ........ b ) ou ,( x...,xxg b ) ou ,( x...,xxg tq
x...,xxf z (min) Max
mn,2,1m
2n,2,12
1n,2,11
n,2,1
≥=≤
≥=≤
≥=≤
=
Um problema de Programação Não Linear(PNL) pode ser colocado da seguinte forma:Encontre valores de x1, x2, ..., xn que:

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Da mesma forma que na Programação
Linear (PL) na PNL f(x1, x2, ..., xn) é a função
objetivo (FO) e gi(x1, x2, ..., xn) (≤, = ou ≥) bi com
i = 1, 2, ..., m são as restrições.
Quando não existirem restrições teremos a
PNL irrestrita.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
O conjunto de todos os pontos
(x1, x2, ..., xn) tal que xi é um número real é
representado por Rn. Assim R1 é o
conjunto de todos os números reais.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
O conjunto de todos os pontos
(x1, x2, ..., xn) que satisfazem as restrições de um
PPNL é denominada de Região Viável (RV).
Um ponto na região é denominado de Ponto
Viável (PV) e um ponto fora da região é
denominado de Ponto Inviável.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Um ponto x* na região viável tal que
f(x*) ≥ f(x) é uma solução ótima do PPNL. (Se o
problema for de minimização x* é uma solução
ótima se f(x*) ≤ f(x) para todos os pontos x da
região).

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Se f, g1, g2, ..., gm forem funções
lineares então o problema será de PL e
poderá ser resolvido pelo algoritmo
Simplex.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
(1) O custo de fabricação de um produto de uma
empresa é c reais e a demanda pelo mesmo é
D(p). Se a empresa quer maximizar o lucro
qual deve ser o preço final do produto.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
(2) Se c unidades de capital e l unidades de mão
de obra são utilizadas uma empresa pode
produzir cl unidades de um produto. O custo
do capital por unidade é de R$ 4,00 e o do
trabalho é de R$ 1,00. Se o total disponível é
de R$ 8,00 como a empresa pode maximizar a
quantidade de bens a ser manufatura?

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Lembrar que:
A região viável de um PPL é um
conjunto convexo, isto é, se A e B são pontos
viáveis então todos os pontos do segmento
ligando A e B são também viáveis.
Também que, se um PPL tem uma
solução ótima então ela é um ponto extremo
da região viável.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Para um PPNL um ponto ótimo não é
necessariamente um ponto extremo da região
viável.
De fato para um PPNL a solução ótima
pode nem sequer ser um ponto de fronteira.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
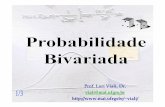
Um PPNL cuja
solução ótima não é
um ponto extremo.
D é a solução
ótima sobre a região
viável formada pelo
triângulo ABE.
l
max z = cls. a 4c + l ≤ 8
c, l ≥ 0
c
8
4
2
D
BA
E
1
cl = 4cl = 4cl = 2cl = 1

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
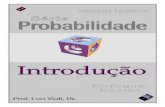
Um PPNL cuja
solução ótima não está
na fronteira da região
viável. A solução ótima
é z = 1 quando x = ½. E
x não está na fronteira
da região viável.
max z = f(x)s. a 0 ≤ x ≤ 1
1/2
1

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Para um PPNL (maximização), um
ponto viável x = (x1, x2, ..., xn) é um
máximo local se para um ε suficientemente
pequeno, qualquer ponto viável
x’ = (x’1, x’2, ..., x’n) tal que |x – x’| < ε
satisfaz f(x) ≥ f(x’).

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
De outro modo, um ponto x é um
máximo local se f(x) ≥ f(x’) para todo x’
viável que está próximo de x.
Um ponto que é um mínimo ou
máximo local é denominado de local,
relativo ou extremo.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Para um PPL (maximização), qualquer
mínimo local é uma solução ótima do
problema (Porquê?).
Para um PPNL isso não é
necessariamente verdadeiro. Por exemplo,
considere o seguinte PPNL:

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
max z = f(x)
s.a 0 ≤ x ≤ 10
onde f(x) é apresentada na figura
seguinte (próxima lâmina).
Note que os pontos A, B e C são
máximos locais mas C é a única solução
ótima do problema.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Um máximo
local pode não
ser uma solução
ótima de um
PPNL.x
z
10
z = f(x)
A
B
C

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Seja f(x1, x2, ..., xn) uma função que
é definida para todos os pontos (x1, x2,
..., xn) em um conjunto convexo S.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
A função f(x1, x2, ..., xn) é uma função
convexa em um conjunto convexo se para
qualquer x’ ∈ S e x”∈ S.
f[cx’ + (1 – c)x”] ≤ cf(x’) + (1 – c)f(x”)
para 0 ≤ c ≤ 1.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
A função f(x1, x2, ..., xn) é uma função
côncava em um conjunto convexo S se
para qualquer x’ ∈ S e x”∈ S.
f[cx’ + (1 – c)x”] ≥ cf(x’) + (1 – c)f(x”)
para 0 ≤ c ≤ 1.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Considerando as definições
anteriores pode-se verificar que uma
função f(x1, x2, ..., xn) é convexa se e
somente -f(x1, x2, ..., xn) é côncava e vice-
versa.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
x’
y = f(x)
x”cx’ + (1–c)x”B
D
AC
Ponto A = (x’, f(x’))
Ponto D = (x”, f(x”))
Ponto C = (cx’+(1 - c)x”, cf(x’)+(1 - c)f(x”))
Ponto B = (cx’+(1-c)x”, f(cx’+(1-c)x”))
Da figura f(cx’+(1-c)x”)) ≤ cf(x’)+(1-c)f(x”))
A f(x) é convexa se e só se osegmento unindo doispontos quaisquer da curvanunca está abaixo dela.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
x’
y = f(x)
x”cx’ + (1–c)x”
B
D
A
C
Ponto A = (x’, f(x’))
Ponto D = (x”, f(x”))Ponto C = (cx’+(1-c)x”, f(cx’+(1-c)x”))
Ponto B = (cx’+(1-c)x”, cf(x’)+(1-c)f(x”))
Da figura f(cx’+(1-c)x”) ≥ cf(x’)+(1-c)f(x”)
A f(x) é côncava se e só se osegmento unindo doispontos quaisquer da curvanunca está acima dela.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Para x ≥ 0, f(x) = x2 e g(x) = ex são funções
convexas e f(x) = x1/2 é uma função côncava.
Favor verificar (graficamente e
analiticamente)!

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Pode ser mostrado que a soma de duas
funções convexas é convexa e que a soma de
duas funções côncavas é côncava.
Assim considerando o exemplo anterior a
função h(x) = f(x) + g(x) = x2 + ex é convexa.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Uma vez que o segmento AB está abaixo
de y = f(x) e o segmento BC está acima da
y = f(x) , f(x) não é côncava nem convexa.
x
y
y = f(x)
AB
C

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Uma função linear da forma f(x) = ax + b é
tanto convexa quanto côncava. Isso é uma
conseqüência de:
f[cx’ + (1 – c)x”] = a[cx’ + (1 – c)x”] + b =
= c(ax’ + b) + (1 – c)(ax” + b) =
= cf(x’) + (1 - c)f(x”)

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Antes de discutir como determinar se
uma função é convexa ou côncava vai-se
provar um resultado que ilustra a importância
desse tipo de função.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Considere um PPNL de maximização
(minimização) e suponha que a região viável S
seja um conjunto convexo. Se f(x) é côncava
(convexa) em S, então qualquer máximo
(mínimo) local do PPNL é uma solução ótima
do PPNL.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Se o teorema é falso então deve existir um
máximo local x’ que não é uma solução ótima.
Seja S a região viável para o PPNL (por
hipótese S é convexo). Então para algum x ∈ S,
f(x) > f(x’). Pela definição de função côncava,
tem-se que para qualquer 0 < c < 1,

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
f(cx’ + (1 – c)x) ≥ cf(x’) + (1 – c)f(x) >
cf(x’) + (1 – c)f(x’) pois f(x) > f(x’)
= f(x’)
Agora observe que para c arbitrariamente
próximo de 1, cx’ + (1 – c)x é viável (S é
convexo) e é próximo de x’. Assim, x’ não pode
ser um máximo local, que é uma contradição e
assim o teorema fica provado.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Seja f(x) uma função de uma única
variável. Suponha que f”(x) existe para todo x
num conjunto convexo S. Então f(x) é uma
função convexa (côncava) em S se e somente
se f”(x) ≥ 0 (f(x“) ≤ 0) para todo x em S.
A prova é dada por um raciocínio
semelhante ao Teorema 1.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Como é possível determinar se uma
função f(x1, x2, ..., xn) de “n “ variáveis é
convexa (côncava) em um conjunto S ⊂ Rn.
Vamos assumir que a f tem derivadas parciais
de segunda ordem contínuas. Antes do critério
para determinar se f é côncava ou convexa são
necessárias três definições.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
O Hessiano da função f(x1, x2, ..., xn) é a
matriz “nxn“ cujo elemento aij é dado por:
aij = ∂2f/∂xi∂xj
Por exemplo o Hessiano da função:
xxx2x)x,x(f 2221
3121 ++= é:

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
∂∂
∂
∂∂
∂
∂∂
∂
∂∂
∂
=
xx
f
xx
fxx
f
xx
f
)x,x(H
22
2
12
221
2
11
2
21
O Hessiano, nesse caso, será:
Resolvendo, tem-se:
=
22
2x6)x,x(H
121

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Um i-ésimo menor principal de uma
matriz nxn é o determinante de qualquer ixi
matriz obtida eliminando n – i linhas e n – i
colunas da matriz nxn.
Assim para a matriz:
−−
−−
41
12
Os primeiros menores principais são -2
e -4 e o segundo é -2(-4)-(-1)(-1) = 7

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
O k-ésimo menor principal líder
de uma matriz nxn é o determinante da
matriz kxk obtida eliminando as
últimas n – k linhas e colunas da
matriz.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
xxx2x)x,x(f 2221
3121 ++=
Se Hk(x1, x2, ..., xn) representar o k-ésimo
menor principal líder da matriz Hessiana
avaliada no ponto (x1, x2, ..., xn), da função:
Os menores principais líderes serão:
H1(x1, x2) = 6x1
H2(x1, x2) = 2.6x1 -2.2 = 12x1 - 4

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Suponha f(x1, x2, ..., xn) tem derivadas
parciais de segunda ordem contínuas em cada
ponto (x1, x2, ..., xn) ∈ S. Então f é uma função
convexa em S se e somente se para cada x ∈ S,
todos os menores principais de H são não
negativos.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Mostre que
xxx2x)x,x(f 2221
2121 ++=
É uma função convexa em S = R2.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Os primeiros menores principais do Hessiano
são as entradas da diagonal principal (ambas
igual a 2 ≥ 0). O segundo menor principal é
2.2 - 2.2 = 0 ≥ 0. Assim para qualquer ponto
todos os menores principais de H são não
negativos. Portanto f(x1, x2) é convexa.
Tem-se que:
=
22
22)x,x(H 21

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Suponha que f(x1, x2, ..., xn) tem derivadas
parciais de segunda ordem contínuas em cada
ponto (x1, x2, ..., xn) ∈ S. Então f é uma função
côncava em S se e somente se para cada x ∈ S
e k = 1, 2, ..., n, todos os menores principais
não nulos tem o mesmo sinal que (-1)k.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Mostre que
x2xx2x)x,x(f 2221
2121 −−−=
É uma função côncava em S = R2.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Os primeiros menores principais do Hessiano
são as entradas da diagonal (-2 e -4) que são
ambos negativos - (-1)k = (-1)1 = -1 . O
segundo menor principal é o determinante de
H que é igual a -2.-4 – (-1).(-1) = 7 > 0 - (-1)k =
(-1)2 = 1. Assim f(x1, x2) é côncava.
Tem-se que:
−−
−−=
41
12)x,x(H 21

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Mostre que a função
x2xx3x)x,x(f 2221
2121 +−=
Não é côncava e nem convexa.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Os primeiros menores principais do Hessianosão 2 e 4 ambos positivos assim f não podeser côncava. O segundo menor principal é odeterminante de H que é igual 2.4 – (-3).(-3) =-1 < 0. Assim f(x1, x2) não pode ser convexa.Desse modo essa função não é nem côncava enem convexa
Tem-se que:
−
−=
43
32)x,x(H 21

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Verifique se a função:
f(x, y, z) = x2 + y2 + z2 – xy – xz – yz,
é côncava, convexa ou nem côncava e nem
convexa.

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Eliminando linhas (e colunas) 1 e 2 obtém-se o
primeiro menor principal de primeira ordem
4 > 0. Eliminado as linhas (e colunas) 1 e 3 do
Hessiano obtém-se o segundo menor principal
de primeira ordem que é 2 > 0.
Tem-se que:
−−
−−
−−
=
411
121
112
)x,x,x(H 321

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Eliminado as linhas (e colunas) 2 e 3 do
Hessiano obtém-se o terceiro menor principal
de primeira ordem que é 2 > 0.
Eliminando a coluna 1 e linha 1 do
Hessiano encontra-se o primeiro menor
principal de segunda ordem:

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Eliminando a linha 2 e a coluna 2 obtém-
se o segundo menor principal de segunda
ordem:
0714.241
12>=−=
−
−
0714.241
12>=−=
−
−

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Eliminando a linha 3 e a coluna 3 obtém-
se o terceiro menor principal de segunda
ordem:0312.2
21
12>=−=
−
−
O menor principal de terceira ordem é o
próprio determinante da matriz Hessiana:

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
Como para todos os pontos (x1, x2, x3) todos os
menores principais do Hessiano são não
negativos mostrou-se que a f(x1, x2, x3) é uma
função convexa em R3.
063514)]1.(2)1)(1)[(1(
)]1)(1(4).1)[(1()]1).(1(4.2[2
411
121
112
>=−−=−−−−−+
+−−−−−−−−−=
=
−−
−−
−−

M É T O D O S Q U A N T I T A T I V O S : E S T A T Í S T I C A E M A T E M Á T I C A A P L I C A D A SD e 1 1 d e m a r ç o a 0 6 d e m a i o d e 2 0 1 6 – p r o f . L o r i V i a l i , D r .
BERTSEKAS, Dimitri P. Nonlinear
Programming. Belmont (MA): Athena
Scientific, 1995.
WISTON, Wayne L. Operations Research:
Applications and Algorithms. 3 ed.
Belmont (CA): Duxbury Press, 1994.





![Comp 1.ppt [Modo de Compatibilidade] - mat.ufrgs.brmat.ufrgs.br/~viali/estatistica/mat2274/material/laminas/Comp_1.pdf · 3 Prof. Lorí Viali, Dr. – UFRGS – Instituto de Matemática](https://static.fdocumentos.tips/doc/165x107/5be58ee509d3f288458bde53/comp-1ppt-modo-de-compatibilidade-matufrgsbrmatufrgsbrvialiestatisticamat2274materiallaminascomp1pdf.jpg)