82732.pdf

of 6
-
Upload
gilmar-demenek -
Category
Documents
-
view
217 -
download
0
Transcript of 82732.pdf
-
X SBAI Simpsio Brasileiro de Automao Inteligente18 a 21 de setembro de 2011So Joo del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 105
SINTONIA DE CONTROLADORES PID COM O ALGORITMO DE EVOLUO DIFERENCIAL
DAVI L. DE SOUZA1, LUCAS F. S. MAIA1, FRAN S. LOBATO2, GUSTAVO M. DE ALMEIDA1
1Campus Alto Paraopeba (CAP), Universidade Federal de So Joo del-Rei
Rod. MG 443, Km 07, 36.420-000, Ouro Branco, MG, Brasil E-mails: [email protected], [email protected]
2 Faculdade de Engenharia Qumica, Universidade Federal de Uberlndia
Campus Santa Mnica, 38.400-902, Uberlndia, MG, Brasil E-mail: [email protected]
Abstract PI and PID controller design (tuning) employ in general classical techniques, such as Ziegler-Nichols and Cohen-Coon. One disadvantage in this case is the need for knowing the process dynamics. An alternative approach is the use of evolu-tionary optimization methods. In this work, one of them called Differential Evolution is used for tuning the PI and PID parame-ters of a controller in a thermal process. The results, compared to those given by the classical techniques, showed that the pro-posed methodology is promising.
Keywords PID controller, Tuning, Differential Evolution.
Resumo O projeto (sintonia) de controladores PI e PID geralmente realizado com tcnicas clssicas, tais como Ziegler-Nichols e Cohen-Coon. Uma das desvantagens a necessidade de conhecimento da dinmica do processo. Uma abordagem al-ternativa o emprego de mtodos evolutivos. Neste trabalho, empregou-se um deles, denominado Evoluo Diferencial, para a sintonia dos parmetros PI e PID de um controlador em um processo trmico. Os resultados, comparados com aqueles obtidos com as tcnicas clssicas, mostraram que a metodologia proposta promissora.
Palavras-chave Controlador PID, Sintonia, Evoluo Diferencial.
1 Introduo
O desenvolvimento de controladores que possuem comportamento uniforme em malha fechada para grandes variaes da dinmica do processo, e robustez, tem acelerado a alta competio do mercado nos dias atuais.
A explorao de novas alternativas de sistemas de controle pode resultar em um fator importante na conquista de mercado. Alm disso, aspectos como aumento da demanda por processos e produtos de qualidade, responsabilidade ambiental e demandas por um mercado varivel e dinmico, motivam a busca por sistemas de controle com flexibilidade operacional, sem o conservadorismo dos mtodos existentes.
Tradicionalmente, em projeto de controladores, mtodos clssicos como Ziegler-Nichols (ZN) e Cohen-Coon (CC) so frequentemente empregados com essa finalidade (Souza, 2007). Apesar da simplicidade de aplicao destas metodologias, elas apresentam, como principal desvantagem, a necessidade de conhecimento da dinmica do processo, o que, em problemas reais, se configura como uma tarefa rdua.
Recentemente, estratgias baseadas em tcnicas heursticas de otimizao tm sido propostas para o projeto de controladores, dentre as quais pode-se citar Lobato e Souza (2008) e Solihin et al. (2011).
Dentre as modernas tcnicas heursticas, o algoritmo de Evoluo Diferencial (ED), proposto por Storn e Price (1995), se configura como uma das metodologias mais utilizadas para a resoluo de problemas de otimizao. Este mtodo consiste basicamente em utilizar operaes vetoriais para a gerao de solues candidatas.
Neste contexto, o objetivo deste trabalho avaliar a aplicabilidade do algoritmo de ED no projeto de controladores PID. Alm disso, comparar os resultados obtidos com aqueles oriundos da aplicao dos mtodos de ZN e CC. Este trabalho estruturado como segue. A seo 2 apresenta uma reviso das tcnicas clssicas para a sintonia de controladores. Uma breve reviso sobre o algoritmo de ED mostrado na seo 3. Nas sees 4 e 5 so apresentados os critrios de desempenho empregados e um estudo de caso. Finalmente, na seo 6, so apresentados os resultados e os trabalhos futuros.
2 Sintonia de Controladores
Na literatura, a grande maioria dos trabalhos que envolvem o projeto de controladores faz uso dos m-todos de ZN e CC. O princpio desses mtodos a correlao entre os parmetros do controlador (Kc, I e D) com os parmetros do modelo (K, e ), atra-vs da resposta temporal do sistema em malha aberta (denominada curva de reao do processo), frente a uma perturbao degrau (Tabela 1).
-
X SBAI Simpsio Brasileiro de Automao Inteligente18 a 21 de setembro de 2011So Joo del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 106
Tabela 1. Sintonia de controladores pelos mtodos de ZN e CC, atravs da curva de reao do processo, em malha aberta (Fonte:
Seborg et al., 1989).
Controla-dor/Mtodo
Ziegler-Nichols (ZN)
Cohen-Coon (CC)
P ( )KK C =
( ) 31KKC +=
PI ( )
( )33,3
9,0KK
I
C
=
=
( )( )[ ]
( )2,20,1
33,033,3
083,09.0KK
I
C
+
+=
+=
PID ( )
( )
( )5,0
0,2
2,1KK
D
I
C
=
=
=
( )
( )( )( )( )
1,35 0, 270
32 6
13 8
0,37
1,0 0, 2
C
I
D
KK
= +
+ =
+
=+
Outro mtodo clssico bastante utilizado o ZN
por meio de sensibilidade limiar (Seborg et al., 1989). Este procedimento vlido apenas para plan-tas estveis em malha aberta, e conduzido com os seguintes passos: (I) Fixao do parmetro propor-cional com um ganho muito pequeno; (II) Aumento do ganho at a obteno de uma resposta oscilatria com amplitude e perodo constantes; (III) Registro do ganho crtico (Ku) e do perodo crtico (Pu); e (IV) Ajuste dos parmetros, conforme a Tabela 2.
Tabela 2. Sintonia de controladores pelo mtodo de ZN, atravs da sensibilidade limiar, em malha fechada (Fonte: Seborg et al.,
1989).
Controlador/ Parmetro
Kc i d
P 0,5Ku
PI 0,45Ku Pu/1,2
PID 0,6Ku 0,5Pu Pu/8
Apesar da grande maioria dos projetos de con-
troladores PID serem sintonizados pelos mtodos clssicos ZN e CC, eles trazem algumas dificuldades, tais como: a necessidade de conhecimento da din-mica do processo em malha aberta, e no caso do m-todo de sensibilidade limiar, a necessidade de traba-lhar prximo ao limite de instabilidade do sistema. Sendo assim, a partir deste cenrio, caracteriza-se a necessidade de novas alternativas para a sintonia de controladors PID.
3 O Algoritmo de Evoluo Diferencial
Dentre os vrios algoritmos de otimizao no de-terminsticos propostos na literatura, o algoritmo de Evoluo Diferencial (ED), proposto por Storn e Price (1995), se configura como uma das principais abordagens para a resoluo de problemas de otimi-zao.
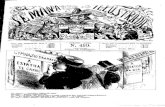
A idia principal por trs desta tcnica o es-quema proposto para atualizao do vetor de vari-veis de projeto de uma populao. Basicamente, a diferena ponderada, via taxa de perturbao F, entre dois indivduos (
2rxr e
3rxr ), adicionada a um terceiro
indivduo (1r
xr
), como mostrado na Figura 1.
Figura 1. Fundamentao terica do algoritmo de ED (Fonte:
Reproduzido de Storn et al., 2005).
O indivduo gerado atravs deste esquema (
ir
)
avaliado pela funo objetivo e pode inclusive substi-tuir indivduos mal sucedidos nas geraes seguintes. Desta forma, nenhuma distribuio de probabilidade em separado deve ser usada, o que torna este esque-ma completamente auto-ajustvel.
De maneira resumida, nessa abordagem pura-mente estrutural, o valor de cada varivel represen-tado por um valor real e a gerao de candidatos feita atravs do uso de operaes vetoriais como a-presentado e detalhado a seguir (Storn e Price, 1995): Inicializar (aleatoriamente) e avaliar a populao P enquanto nenhum critrio de parada for satisfeito faa { para (i = 0; i < NP; i++) { Rotina Candidato C[i] Avalie o candidato C[i] se (C[i] melhor que P[i]) P[i] = C[i] seno P[i] = P[i]} P = P}
em que NP o tamanho da populao, P a po-pulao da gerao atual, e P a populao da pr-xima gerao. O procedimento para a criao do candidato (C[i]) mostrado a seguir: Candidato C[i] Aleatoriamente selecione os pais P[i1], P[i2] e P[i3], (i i1 i2 i3). Gerao do candidato: C1[i] = P[i1] + F (P[i2]-P[i3]). C[i] por cruzamento dos genes de P[i] e C1[i] como segue: para (j = 0 ; j < NP ; j++) { se (r < CR) C[i][j] = C1[i][j] seno C[i][j] = P1[i][j]}
em que C[i] a soluo candidata i da popula-o, C[i][j] a j-sima entrada no vetor soluo de C[i], r um nmero aleatrio entre 0 e 1, CR a pro-babilidade de cruzamento e F a taxa de perturba-o.
-
X SBAI Simpsio Brasileiro de Automao Inteligente18 a 21 de setembro de 2011So Joo del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 107
O algoritmo implementado por Storn e Price (1995) possibilita a escolha do tipo de estratgia que ser utilizada durante o processo evolutivo. Tais es-tratgias dependem do vetor escolhido para ser per-turbado, do nmero de vetores que sero considera-dos para a perturbao e do tipo de cruzamento que ser utilizado. Storn e Price (1995) aconselham uma populao em torno de 5 a 10 vezes o nmero de variveis do problema, e taxa de perturbao e pro-babilidade de cruzamento iguais a 0,5.
Na literatura, pode-se encontrar inmeras aplica-es do algoritmo de ED em reas distintas da cin-cia, dentre as quais pode-se citar: estimao de par-metros trmicos em reator de leito (Babu e Sastry, 1999), sntese e otimizao de sistemas integrados de energia aplicados a destilao (Babu and Singh, 2000), estimao de parmetros cinticos em proces-sos de fermentao a batelada alimentada (Wang et al., 2001), projeto de sistemas de engenharia (Lobato e Steffen, 2007), determinao da difusividade trmi-ca aparente na secagem de frutas (Mariani et al., 2008), projeto de sistemas de engenharia com enfo-que multi-objetivo (Lobato, 2008), estimao dos parmetros da equao de Page e do coeficiente de perda de calor de um secador rotativo em escala pilo-to (Lobato et al., 2008), estimao de parmetros trmicos em transferncia radiativa (Lobato et al., 2010), alm de outras aplicaes (Storn et al., 2005).
4 Critrios de Desempenho
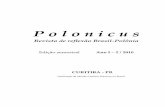
Com o objetivo de comparar a tcnica proposta com os mtodos clssicos ZN e CC, aplicou-se o seguinte ndice de Desempenho (d):
s
d
( t / t ) OS
2
+ = , (1)
em que ts o tempo de assentamento, OS, o o-
vershoot, e t, o tempo total de simulao. O ndice de Desempenho est contido no domnio [0, 1]. Na Fi-gura 2, ilustra-se o clculo de ts, dado pelo tempo de assentamento na faixa 0,95b e 1,05b. enquanto OS obtido de acordo com:
aOS
b= . (2)
5 Aplicao
O estudo de caso deste trabalho consiste de um tro-cador de calor do tipo casco-tubo em contra-corrente. Na Figura 3, Qc,i e Tc,i representam, respectivamente, a vazo e a temperatura de entrada do fluido quente, e Qt,e e Tt,e, a vazo e a temperatura de entrada do fluido frio. Tc a temperatura do fluido no lado do casco e Tt a temperatura do fluido no lado dos tu-bos.
Figura 2. Medidas de desempenho do sistema de controle (Fonte: Seborg et al., 1989).
Tc,s Qc,s
Tc,e Qc,e
Tt,eQt,e
Tt,sQt,s
Tt
Tc
Figura 3. Desenho esquemtico do trocador de calor (Fonte: Gar-cia, 2005).
O objetivo desse sistema aquecer uma corrente
de gua a 40 oC a partir de uma corrente de gua quente. As trocas trmicas consideradas so: a trans-ferncia de calor entre os fluidos circulando nos tu-bos e no casco, a transferncia de calor entre o fluido circulando no casco e suas paredes, e o transporte de energia (entalpia) devido ao escoamento dos fluidos nos tubos e casco. Maiores informaes sobre a for-mulao e as consideraes esto em Garcia (2005).
A descrio matemtica do sistema de troca tr-mica resultante da combinao das equaes do sis-tema com as relaes constitutivas so dadas pelas equaes a seguir:
( ) ( )aptt
ctstetapetetst
cV
TAUTTcQ
dt
Td
,
,,,,,,
+=
, (3)
( ) ( )apcc
ctscecapececsc
cV
TAUTTcQ
dt
Td
,
,,,,,,
=
, (4)
( ) ( ) o o 40 C 74,4 Ct ,s c ,sT 0 T 0 = , (5)
onde t,e e t so as massas especficas da gua quente de alimentao e nos tubos, respectivamente (constantes e iguais a 998,21 kg/m3 e 995,65 kg/m3); c,e e c so as massas especficas da gua fria de ali-mentao e no casco, respectivamente (constantes e iguais a 965,31 kg/m3 e 971,79 kg/m3); Vt o volume externo dos tubos e Vc o volume interno disponvel no casco (constantes e iguais a 3,38510-3 m3 e 4,55710-3 m3, respectivamente); cp,a o calor espec-
-
X SBAI Simpsio Brasileiro de Automao Inteligente18 a 21 de setembro de 2011So Joo del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 108
fico da gua (constante e igual a 1,0 kcal/(kgC); U o coeficiente global de transferncia de calor (cons-tante e igual a 1.089,7 W/(m2K); A a rea mdia de troca trmica (constante e igual a 0,8822 m2); e
( )ctctctct
ctTT
TTT
min,max,
min,max,
ln
= a mdia logartmica da
diferena de temperatura, com etscct TTT ,,max, = e
stecct TTT ,,min, = .
A equao do conjunto sensor-transmissor se comporta como um sistema de 1a ordem e a tempera-tura transmitida (Tt, em
oC) dada por:
( ) ( ) ( ) 14,6 mAt t m.mV t tt
d T K T 1,019 T, T 0
dt
= =
, (6)
em que Kt o ganho do transmissor (igual a 10,2
mA/mV); Tm,mV a temperatura medida pelo sensor em mV; t a constante de tempo do conjunto (igual a 2s); e a temperatura transmitida em mA dada por
4, += tmAt TT .
A equao do conjunto conversor I/P-vlvula de controle modelado como um sistema de 1a ordem e a posio da haste da vlvula (X, em p.u.) dada por:
( ) ( ) ( ) 0,6p.u.ATAT
d X K v 3 XX 0
dt
= =
, (7)
em que KAT o ganho esttico do atuador (igual
a 1/12 p.u./psig); v o sinal de sada do conversor I/P (igual a ( )[ ] 34 + mAmK IP , em que KIP o ganho do conversor e m o sinal de 4 a 20 mA recebido pelo conversor); e AT a constante de tempo do con-junto (igual a 10 s).
Por fim, a equao que define a vazo atravs da vlvula (Qc,e, em m
3/s) dada por:
ecV
X
VVec PRCKQ ,1
, = , (8)
em que KV o fator de ajuste de unidades (igual
a 7,610-3); CV o coeficiente de vazo (igual a 27 gpm/psi1/2); R a "rangeabilidade" (igual a 30); e PV a queda de presso atravs da vlvula (constan-te e igual a 0,2 bar).
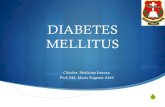
Com a combinao da modelagem do processo, do clculo dos parmetros do modelo, das modela-gens da transmisso do sinal de temperatura e do conjunto conversor I/Pvlvula de controle, e da de-finio das condies iniciais do sistema, apresenta-se, na Fig. 4, a representao grfica do modelo do trocador de calor no-linearizado em malha fechada.
A Tabela 3 apresenta, para a simulao do sis-tema de troca trmica em malha fechada com um controlador PI, o resultado disponvel na literatura (Garcia, 2005) com aqueles sintonizados pelos mto-dos: Ziegler-Nichols por sensibilidade limiar (ZN-
SL) e por curva de reao (ZN-CR), Cohen-Coon (CC-CR) e mtodo de Evoluo Diferencial (ED) (com uma populao com 40 indivduos, taxa de per-turbao igual a 0,8 e probabilidade de cruzamento igual a 0,5). Apresenta-se tambm, para o mesmo sistema em malha fechada, os resultados da sintonia de um controlador PID, sintonizado pelos mtodos: Ziegler-Nichols por sensibilidade limiar (ZN-SL) e por curva de reao (ZNCR), Cohen-Coon (CC-CR) e mtodo de Evoluo Diferencial (ED).
Pode-se observar, atravs da anlise do ndice de desempenho proposto (d), a qualidade do projeto de controladores obtida com o algoritmo de ED, que comparando com as tcnicas clssicas demonstrou equivalncia. A Tabela 4 apresenta os valores dos parmetros para os controladores analisados. O m-todo evolutivo foi aplicado ao sistema localmente linearizado, e ento implementado no modelo no-linear (Figura 4), o que ressalta a sua eficincia. Na Figura 5, so apresentadas as respostas do sistema frente a uma perturbao degrau unitria no set-point, isto , de 40 para 41 oC, para cada uma das sintonias dos controladores PI e PID. Pode-se observar a efi-ccia da metodologia proposta quando comparada com os mtodos clssicos de ZN e CC.
Tabela 3. Comparativo entre os mtodos de sintonia analisados.
Mtodo Erro Quadrtico Mdio d
PI (Garcia, 2005)
35,81 0,127990
PI (ZN-SL) 22,58 0,079193
PI (ZN-CR) 38,48 0,008692
PI (CC-CR) 24,91 0,062792
PI (ED) 39,79 0,009491
PID (ZN-SL) 23,75 0,237793
PID (ZN-CR) 22,09 0,006494
PID (CC-CR) 19,90 0,043793
PID (ED) 22,65 0,006993
Tabela 4. Parmetros dos controladores PI e PID.
Parmetros Mtodo
KC I D
PI (Garcia, 2005)
0,40 2,50
PI (ZN-SL) 4,41 50,00
PI (ZN-CR) 2,52 44,95
PI (CC-CR) 2,72 16,63
PI (ED) 1,00 13,38
PID (ZN-SL) 5,88 30,00 7,50
PID (ZN-CR) 3,36 27,00 6,75
PID (CC-CR) 4,43 26,02 4,25
PID (ED) 2,93 21,57 6,16
-
X SBAI Simpsio Brasileiro de Automao Inteligente18 a 21 de setembro de 2011So Joo del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 109
ev Qce
Vlvula
de controle
QTe
QCe
TTe
TCe
TTs
Trocador
de calor
Tref
TTs
TTe
TCe
QTe
PV_oCPV_mA
Medidor de
temperatura
Tref Tref_mA
Converso de Tref
de oC para mA
p v
Conversor
I/P
e p
Controlador
PI
(a)
Tcs
1
TTs
1
s
1
s
TTs
TTe
TCe
TCs
q
Clculo de
q=U.A.dTct
cPA
cPA
rho_C
rho_T
VC
VT
rho_Te
rho_Ce
cPA
cPA
4
TCe
3
TTe
2
QCe
1
QTe
(b)
Figura 4. (a) Modelo do trocador de calor no-linearizado em malha fechada e (b) subsistema com o modelo do trocador de calor.
0 100 200 300 400 500 600 700 800 900 100039.5
40
40.5
41
41.5
Tempo (s)
TTs
PI Lit
PI ZNSL
PI ZNCR
PI CCCR
PI ED
0 100 200 300 400 500 600 700 800 900 100040
40.5
41
41.5
Tempo (s)
TTs
PID ZNSL
PID ZNCR
PID CCCR
PID ED
Figura 5. Resposta do sistema de troca trmica, frente a uma perturbao degrau unitria no set-point de 40 para 41 oC, para cada uma das
sintonias dos controladores PI e PID.
-
X SBAI Simpsio Brasileiro de Automao Inteligente18 a 21 de setembro de 2011So Joo del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 110
6 Concluso
Este trabalho objetivou a aplicao do algoritmo de ED para o projeto de controladores PI e PID. A me-todologia proposta foi aplicada na sintonia de um controlador em um sistema de troca trmica em ma-lha fechada. Os resultados obtidos foram comparados com a sintonia realizada atravs dos mtodos tradi-cionais de Ziegler-Nichols (ZN) e Cohen-Coon (CC). Como pode ser observado na Tabela 2, o resultado com o algoritmo de ED foi o esperado, e a metodolo-gia proposta se configura como uma promissora al-ternativa para o projeto de controladores.
Como propostas de trabalhos futuros, pode-se ci-tar a aplicao da metodologia em plantas industriais, a anlise de sensibilidade dos parmetros do algorit-mo de ED na qualidade da soluo, e a hibridizao do algoritmo com outras tcnicas clssicas e heursti-cas.
Agradecimentos
Os autores agradecem FAPEMIG e ao CNPq pelo apoio financeiro.
Referncias Bibliogrficas
Babu, B. V., Sastry, K. K. N. (1999). Estimation of Heat-transfer Parameters in a Trickle-bed Reac-tor using Differential Evolution and Orthogonal Collocation. Computers and Chemical Engineer-ing, Vol. 23, pp. 327-339.
Babu, B. V., Singh, R. P. (2000). Synthesis and Op-timization of Heat Integrated Distillation Sys-tems Using Differential Evolution, in Proceed-ings of the All-India Seminar on Chemical Engi-neering Progress on Resource Development.
Garcia, C. (2005). Modelagem e Simulao. EdUSP, So Paulo, SP.
Lobato, F. S. (2008). Multi-objective Optimization to Engineering System Design. Tese, Escola de En-genharia Mecnica, Universidade Federal de Uberlndia, Brasil.
Lobato, F. S., Souza, D. L. (2008). Adaptive Differ-ential Evolution Method Applied To Syntony of Controllers, in 7th Brazilian Conference on Dy-namics, Control and Application.
Lobato, F. S., Steffen Jr., V. (2007). Engineering System Design with Multi-Objective Differential Evolution, in Proceedings of the 19th Interna-tional Congress of Mechanical Engineering.
Lobato, F. S., Steffen Jr., V., Arruda, E. B., Barrozo, M. A. S. (2008). Estimation of Drying Parame-ters in Rotary Dryers using Differential Evolu-tion, Journal of Physics: Conference Series, Vol. 135, doi:10.1088/1742-6596/135/1/012063.
Lobato, F. S., Steffen Jr., V., Neto, A. J. S. (2010). Estimation of Space-Dependent Single Scatter-
ing Albedo, in Radiative Transfer Problems, In-verse Problems, Design and Optimization Sym-posium.
Mariani, V. C., Lima, A. G. B., Coello, L. S. C. (2008). Apparent Thermal Diffusivity Estimation of the Banana during Drying using Inverse Method. Journal of Food Engineering, Vol. 85, pp. 569-579.
Price, K., Storn, R. (1997). Differential Evolution A Simple Evolution Strategy for Fast Optimiza-tion. Dr. Dobbs Journal, Vol. 22, No. 4, pp. 18-24.
Seborg, D. E., Edgar, T. F., Mellichamp, D. A., (1989). Process Dynamics and Control. Wiley Series in Chemical Engineering.
Solihin, M. I., Tack, L. F., Kean, M. L. (2011). Tun-ing of PID Controller Using Particle Swarm Op-timization (PSO), in Proceeding of the Interna-tional Conference on Advanced Science, Engi-neering and Information Technology, ISBN 978-983-42366-4-9.
Souza, D. L. (2007). Anlise do Desempenho de Sis-temas de Controle. Dissertao de Mestrado, Fa-culdade de Engenharia Qumica, Universidade Federal de Uberlndia, Brasil.
Storn, R., Price, K. (1995). Differential Evolution: A Simple and Efficient Adaptive Scheme for Global Optimization Over Continuous Spaces. International Computer Science Institute, Vol. 12, pp. 1-16.
Storn, R., Price, K., Lampinen, J. A. (2005). Differ-ential Evolution - A Practical Approach to Global Optimization. Springer: Natural Comput-ing Series.
Wang, F. S., Su, T. L., Jang, H. J. (2001). Hybrid Differential Evolution for Problems of Kinetic Parameter Estimation and Dynamic Optimization of an Ethanol Fermentation Process. Industry Engineering Chemical Research, Vol. 40, pp. 2876-2885.