
4 – RESULTADOS - Biblioteca Digital de Teses e ... · Quando consideramos um segmento qualquer do...
15
Resultados 63 4 – RESULTADOS Observou-se que o presente trabalho propõe-se fundamentalmente a desenvolver uma metodologia para a determinação de forças atuantes durante o movimento de flexão/extensão da coluna vertebral, utilizando-se de medições simultâneas com procedimentos de Cinemetria, Ressonância Magnética e Antropometria. Com o objetivo de selecionar das imagens obtidas, o quadro em que o indivíduo possui a maior flexão (45 graus), foi utilizado uma rotina do programa MATLAB em anexo (Figura 32). Figura 32. Imagens projetadas, registradas pelas câmeras 1 e 2 em um mesmo instante simultaneamente, com o indivíduo fazendo uma flexão de 45 graus.
-
Upload
nguyenlien -
Category
Documents
-
view
213 -
download
0
Transcript of 4 – RESULTADOS - Biblioteca Digital de Teses e ... · Quando consideramos um segmento qualquer do...
Resultados
63
4 – RESULTADOS
Observou-se que o presente trabalho propõe-se fundamentalmente a
desenvolver uma metodologia para a determinação de forças atuantes durante o
movimento de flexão/extensão da coluna vertebral, utilizando-se de medições
simultâneas com procedimentos de Cinemetria, Ressonância Magnética e
Antropometria.
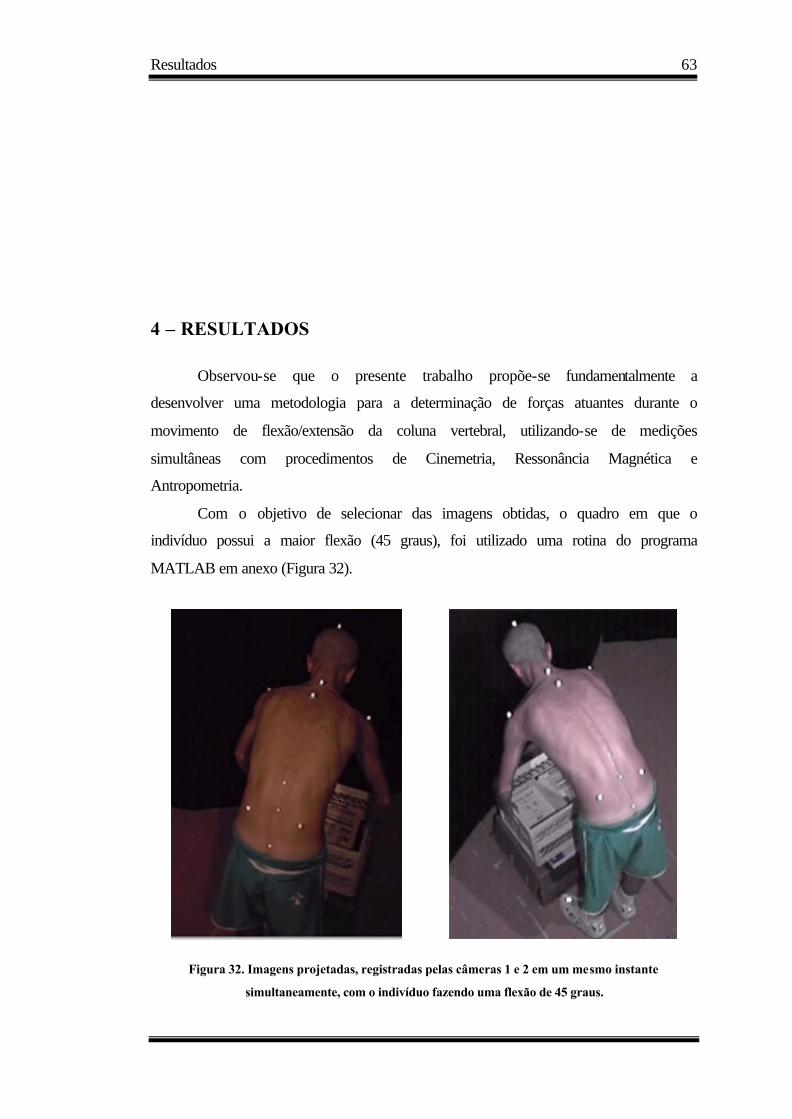
Com o objetivo de selecionar das imagens obtidas, o quadro em que o
indivíduo possui a maior flexão (45 graus), foi utilizado uma rotina do programa
MATLAB em anexo (Figura 32).
Figura 32. Imagens projetadas, registradas pelas câmeras 1 e 2 em um mesmo instante
simultaneamente, com o indivíduo fazendo uma flexão de 45 graus.
Resultados
64
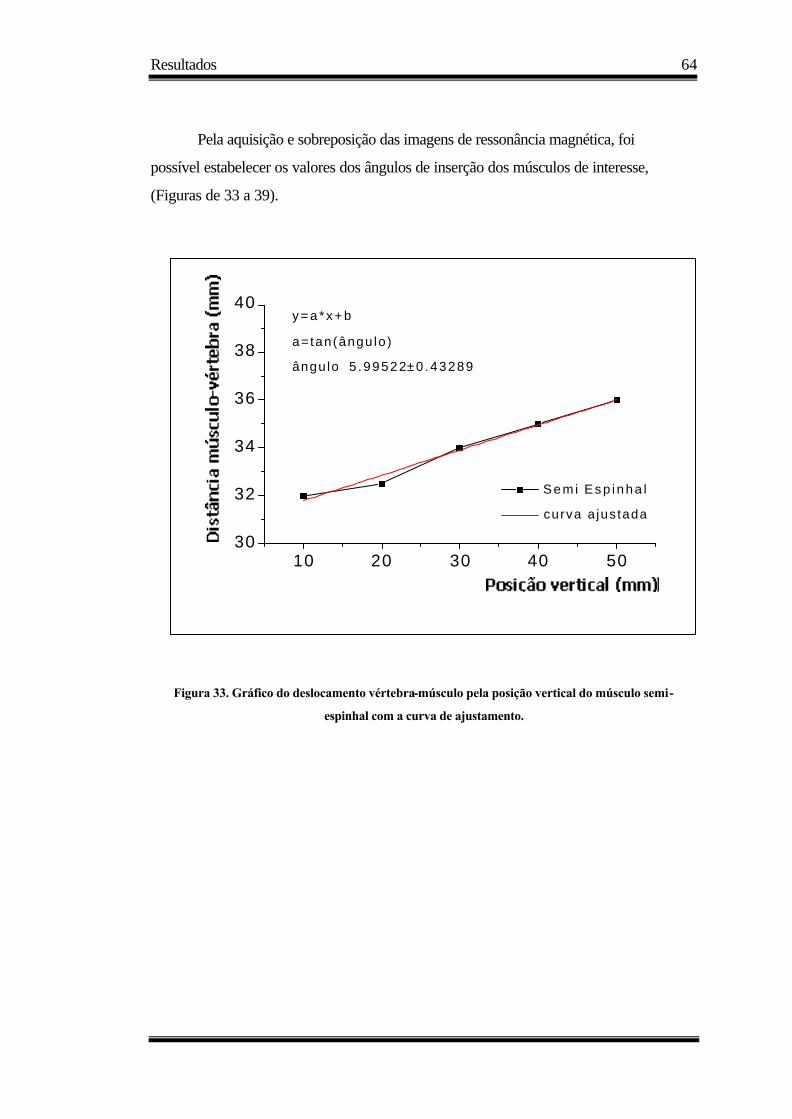
Pela aquisição e sobreposição das imagens de ressonância magnética, foi
possível estabelecer os valores dos ângulos de inserção dos músculos de interesse,
(Figuras de 33 a 39).
Figura 33. Gráfico do deslocamento vértebra-músculo pela posição vertical do músculo semi-
espinhal com a curva de ajustamento.
10 20 30 40 5030
32
34
36
38
40y = a * x + b
a=tan(ângu lo )
ângulo 5 .99522± 0 .43289
Sem i Esp inha l
curva a justada
De
slo
cam
en
to v
ért
eb
ra-m
úsc
ulo
[m
m]
Posição vert ical [mm]
Resultados
65
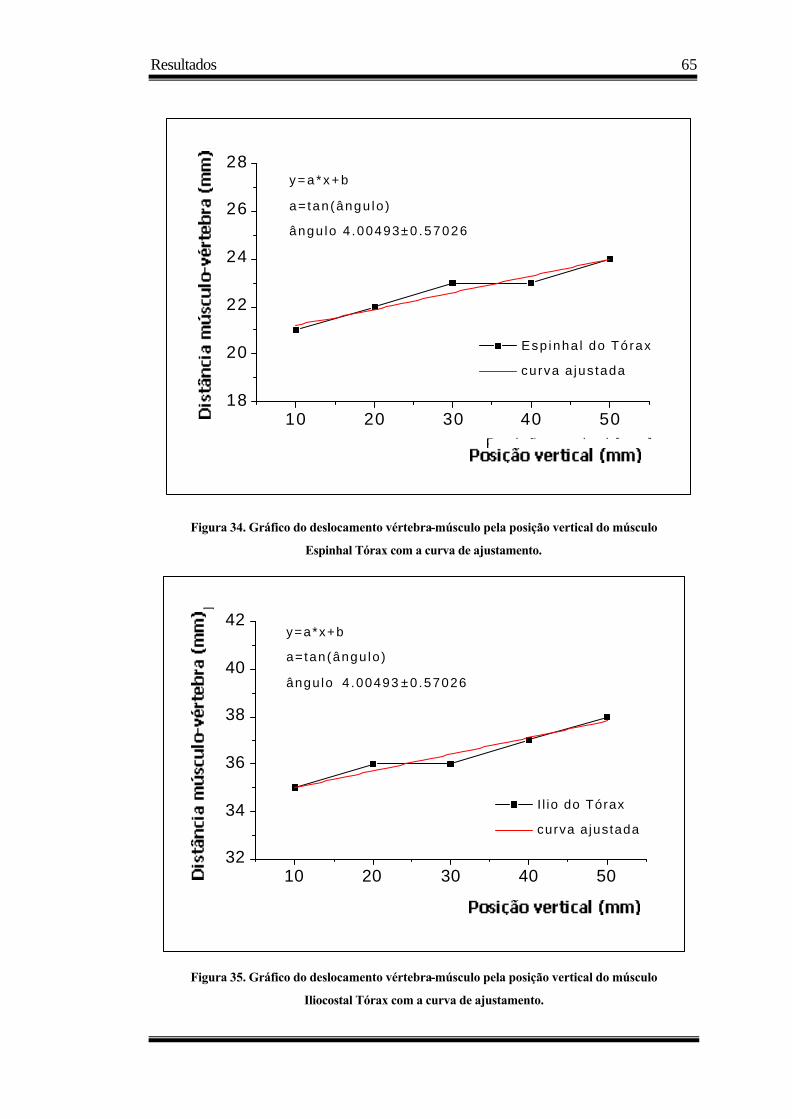
Figura 34. Gráfico do deslocamento vértebra-músculo pela posição vertical do músculo
Espinhal Tórax com a curva de ajustamento.
Figura 35. Gráfico do deslocamento vértebra-músculo pela posição vertical do músculo
Iliocostal Tórax com a curva de ajustamento.
10 20 30 40 5032
34
36
38
40
42y=a*x+b
a=tan(ângu lo )
ângulo 4 .00493 ± 0.57026
I l io do Tórax
curva a justada
De
slo
cam
en
to v
ért
eb
ra-m
úsc
ulo
[m
m]
Posição vertical [mm]
10 20 30 40 5018
20
22
24
26
28y = a * x + b
a=tan(ângu lo )
ângu lo 4 .00493± 0 .57026
Esp inha l do Tórax
curva a jus tada
De
slo
cam
en
to v
ért
eb
ra-m
úsc
ulo
[m
m]
Posição vertical [mm]
Resultados
66
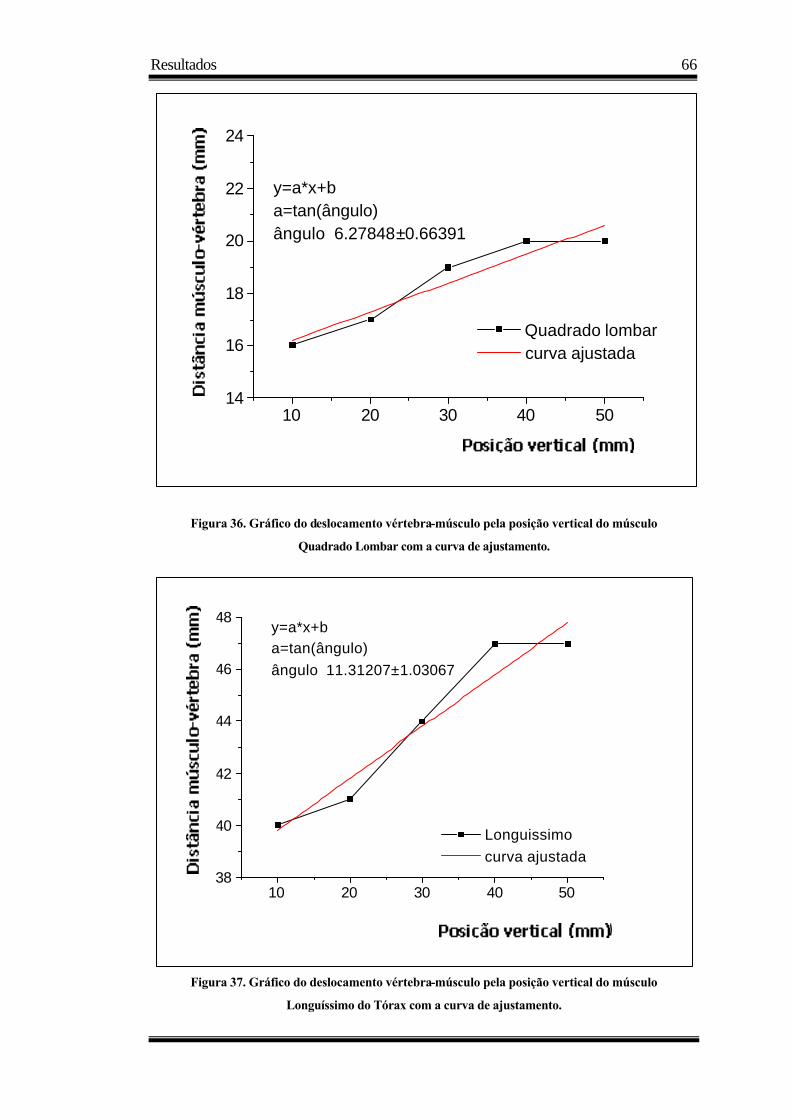
Figura 36. Gráfico do deslocamento vértebra-músculo pela posição vertical do músculo
Quadrado Lombar com a curva de ajustamento.
Figura 37. Gráfico do deslocamento vértebra-músculo pela posição vertical do músculo
Longuíssimo do Tórax com a curva de ajustamento.
10 20 30 40 5014
16
18
20
22
24
y=a*x+ba=tan(ângulo)ângulo 6.27848±0.66391
Quadrado lombar curva ajustada
De
slo
cam
en
to v
ért
eb
ra-m
úsc
ulo
[m
m]
Posição vertical [mm]
10 20 30 40 5038
40
42
44
46
48y=a*x+ba=tan(ângulo)
ângulo 11.31207±1.03067
Longuissimo
curva ajustada
De
slo
cam
en
to v
ért
eb
ra-m
úsc
ulo
[m
m]
Posição vertical [mm]

Resultados
67
Figura 38. Gráfico do deslocamento vértebra-músculo pela posição vertical do músculo
Multifídus com a curva de ajustamento.
Figura 39. Gráfico do deslocamento vértebra-músculo pela posição vertical do músculo
Iliocostal Lombar com a curva de ajustamento.
10 20 30 40 5032
34
36
38
40
42 y=a*x+ba=tan(ângulo)ângulo 6.03571±1.10919
Ilio Lombar curva ajustada
De
slo
cam
en
to v
ert
eb
ra-m
úsc
ulo
[m
m]
Posição vertical [mm]
10 20 30 40 5020
22
24
26
28
30
y=a*x+ba=tan(ângulo)
ângulo 5.71167±0.00069
Multifídus curva ajustada
Des
loca
men
to v
érte
bra-
mús
culo
[mm
]
Posição vertical [mm]

Resultados
68
Os pontos dos gráficos foram ajustados linearmente, de modo que pudessem
ser traçadas as retas e estabelecidos os ângulos de inserção, (tabela 5).
Tabela 5 - Graus das inserções musculares de interesse e erro das mesmas.
MÚSCULOS ÂNGULO
APROXIMADO
ERRO (mm)
Multifidus 5.710 0.00069
Iliocostal lombar 6.030 1.10919
Quadrado lombar 6.270 0.66391
Longuíssimo do tórax 11.310 1.03067
Semi-espinhal do tórax 5.990 0.43289
Iliocostal do tórax 4.000 0.57026
Espinhal do tórax 4.000 0.57026
O modelo antropométrico de ZATSIORKY forneceu os dados necessários
para a elaboração do modelo de segmentos articulados e o cálculo das forças atuantes
(figura 42).
SCOTT et al (2001); BOJADSEN (1998), forneceram as medidas das àreas
de secção fisiológica dos músculos (PCSA) atuantes na coluna vertebral (tabela 6),
As medidas foram normalizadas, considerando-se que todos os músculos do tronco
têm o mesmo padrão de desenvolvimento de força.

Resultados
69
Tabela 6 - Medidas das PCSAs dos músculos atuantes na coluna vertebral e fator de correlação
adotado.
MÚSCULOS PCSA (cm2) FATOR CORRELAÇÃO
PCSA Multifídus 1,3 0,22
Semi-espinhal Tórax 0,7 0,11
Espinhal Tórax 1,6 0,27
Longuíssimo Tórax 5,9 1,0
Iliocostal Tórax 4,1 0,69
Iliocostal Lombar 4,1 0,69
Quadrado Lombar 1,6 0,27
Figura 42. Gráfico dos Segmentos: ligados pelos pontos marcados no indivíduo, indicando o
deslocamento vertical e horizontal do movimento: primeiro segmento (L5 a L2); segundo
segmento (L2 a T3); terceiro segmento (T3 a C7); quarto segmento (C7 ao vértice da cabeça).

Resultados
70
4.1- Cálculo das Forças atuantes
Quando consideramos um segmento qualquer do corpo humano como um
corpo isolado, todas as forças internas do segmento não podem ser calculadas usando
tratamento mecânico convencional, que permite somente o cálculo de forças
externas.
No presente estudo, a coluna é abordada como composta de 3 segmentos
distintos, cuja articulação entre si faz resultar no movimento de flexão/extensão da
coluna. Assim, o movimento na articulação L5/S1 responde pela inclinação do
tronco, enquanto o movimento do segmento torácico responde pela orientação da
porção superior do tronco e cabeça.
A abordagem ora considerada permite uma melhor determinação das forças
musculares e de contato resultantes da elevação de uma carga igual a 20% do peso
corpóreo do indivíduo, pela localização das forças de cada grupo muscular
envolvido.
O trabalho apresenta a metodologia para a determinação das forças atuantes
em qualquer posição do movimento. Para fins ilustrativos, considera-se a situação em
que o segmento lombar encontra-se a 450 de inclinação em relação à linha horizontal.
O cálculo das forças atuantes é feito com a aplicação do conceito de
equilíbrio estático (rotacional e translacional) para o tronco em relação ao eixo
sagital que passa pelo plano transversal à linha articular L5/S1.
Para fins de cálculo, considera-se o instante em que o indivíduo encontra-se
elevando a carga, com uma inclinação do segmento lombar da coluna de 450 em
relação à horizontal e com uma inclinação do segmento torácico da coluna de 260 em
relação à horizontal.
O princípio de equilíbrio estático postula que o somatório de todas as forças
atuantes no segmento é nulo (pois não ocorre movimento acelerado). Da mesma
forma o somatório de todos os momentos de força em torno do eixo que passa por
L5/S1 também deve ser nulo (equilíbrio rotacional).
Resultados
71
Para um sistema de coordenadas XY, as forças envolvidas (musculares,
gravitacionais e de contato) serão:
P – Peso do Indivíduo
Pc – Peso da cabeça
Pb – Peso do braço
Pts – Peso do tronco superior
Ptm - Peso do tronco Médio
Pti – Peso do tronco Inferior
W – Carga
FM1 – Força muscular do Multifídus
FM2 - Força muscular do Semi-Espinhal
FM3 – Força muscular do Espinhal Torácico
FM4 – Força muscular do Longuíssimo Torácico
FM5 – Força muscular do Iliocostal Torácico
FM6 – Força muscular do Iliocostal Lombar
FM7 – Força muscular do Quadrado Lombar
α1 – Ângulo de inserção muscular da FM1
α2 – Ângulo médio de inserção muscular da FM2
α3 – Ângulo médio de inserção muscular da FM3
α4 – Ângulo médio de inserção muscular da FM4
α5 – Ângulo médio de inserção muscular da FM5
α6 – Ângulo médio de inserção muscular da FM6
α7 – Ângulo médio de inserção muscular da FM7

Resultados
72

Resultados
73

Resultados
74
Figura 43. Gráfico do modelo com quatro segmentos articulados entre si (primeiro L5-L2, segundo L2-T3,
terceiro T3-C7, quarto C7-vértice da cabeça), segundo o modelo antropométrico de Zatsiorsky; com as forças
(musculares, CM, peso) localizadas nas inserções médias, os ângulos de inserções musculares e o levantamento
sendo feito a 450 de inclinação do tronco.

Resultados
75
Da figura 43, têm-se as equações de equilíbrio.
Equilíbrio Translacional:
∑∑F= 0
R + FM1 + FM2 + FM3 + FM4 + FM5 + Fm6 + FM7 + Pts + Ptm + Pti
+ Pc + W + Pb = 0
Desmembrando as forças nas componentes segundo os eixos X e Y, vem que:
eixo X:
Rx = 0,938FM1 + 0,940FM2 + 0,927FM3 + 0,967FM4 + 0,927FM5 +
+ 0,940FM6 + 0,780FM7.
A equação 4 permite a determinação da componente horizontal da força de contato
R.
eixo Y:
RY = 0,346FM1 + 0,342FM2 + 0,374FM3 + 0,253FM4 + 0,374FM5 +
+ 0,341FM6 + 0,626FM7 + 0,972P.
A equação 5 permite o cálculo da componente vertical da força de contato R.
A condição do equilíbrio rotacional estabelece que o momento de força sobre
a porção do corpo isolada deve ser nulo, ou seja:
∑∑M = 0
MR + MFM1 + MFM2 + MFM3 + MFM4 + MFM5 + MFm6 + MFM7 +
+ MPts + MPtm + MPti + MPc + MW + MPb = 0
Uma vez que o centro de rotação de referência é o eixo que passa pela
articulação L5/S1, onde aplica-se ao centro de rotação,
(4)
(5)
(3)
(6)
(7)
Resultados
76
MFM1 + MFM2 + MFM3 + MFM4 + MFM5 + MFm6 + MFM7 +
+ MPts + MPtm + MPti + MPc + MW + MPb = 0
Para o cálculo dos momentos de força, as distâncias entre a linha de ação das
forças e o centro de rotação são referidos em centímetros nos eixos X eY, medido
segundo a direção do segmento lombar da coluna.
A equação de equilíbrio rotacional fica:
5,75FM1 + 7,41FM2 + 5,52FM3 + 9,57FM4 + 5,66FM5 + 5,82FM6 +
+ 0,89FM7 = 31,76P
Utilizando-se os fatores de correlação PCSA, podemos escrever:
FM1 = 0,22F
FM2 = 0,11F
FM3 = 0,27F
Fm4 = 1,00F
Fm5 = 0,69F
Fm6 = 0,69F
Fm7 = 0,27F
5,75 (0,22F) + 7,41 (0,11F) + 5,52 (0,27F) + 9,57 (1,00F) + 5,66 (0,69F)
+ 5,82 (0,69F) + 0,89 (0,27F) = 31,76P
Portanto F= 1,49P
FM1 = 0,22 (1,49P) = 0,32P
FM2 = 0,11 (1,49P) = 0,16P
FM3 = 0,69 (1,49P) = 0,40P
Fm4 = 1,49P
Fm5 = 0,69 (1,49P) = 1,02 P
(8)
(9)

Resultados
77
Fm6 = 0,27 (1,49P) = 1,02P
Fm7 = 0,27 (1,49P) = 0,40P
Substituindo os valores das forças musculares na equação 4 temos:
Rx = 4,46P
Substituindo os valores das forças musculares na equação 5 temos:
RY = 2,62P
A força de contato R é dada simplesmente pela expressão (Teorema de
Pitágoras): R = 22 )()( yx RR + R = 5,17P
Portanto a sobrecarga gerada na coluna vertebral, com um índivíduo elevando
uma carga de 20% de seu peso, a 45 graus, é de aproximadamente 5,17 vezes o seu
peso.
(11)
(12)
(13)


















