




Línguas
Páginas
Legal


Introducao Procedimento Projeto de PID e IMC
Internal Model Control (IMC)e
projeto de PID usando IMC
Gustavo H. C. Oliveira
Dept. de Engeharia Eletrica / UFPR
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 1/18

Introducao Procedimento Projeto de PID e IMC
Sumario
1 Introducao
2 ProcedimentoExemplo
3 Projeto de PID e IMCExemplo
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 2/18

Introducao Procedimento Projeto de PID e IMC
Motivacao
Deseja-se projetar um controlador C para um processo quepossui funcao de transferencia H0(s).
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 3/18

Introducao Procedimento Projeto de PID e IMC
O Projeto IMC
O projeto IMC esta baseado em reestruturar a malha decontrole da seguinte forma:
sendo H(s) o modelo conhecido do processo, cuja funcao detransferencia real e H0.
Projeta-se entao a funcao Q(s) e o controlador e a estruturacompleta.
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 4/18

Introducao Procedimento Projeto de PID e IMC
O Projeto IMC
Note que:
A equacao do controlador em funcao de Q(s) e do modeloH(s) e:
C(s) =Q(s)
1−Q(s)H(s). (1)
Na ausencia de perturbacoes (d(s) = 0) e de erros demodelagem (H(s) = H0(s)), a realimentacao e nula.E:
y(s) = Q(s)H(s)r(s). (2)
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 5/18
Introducao Procedimento Projeto de PID e IMC
Procedimento
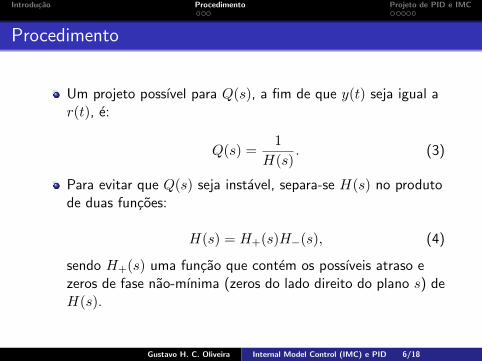
Um projeto possıvel para Q(s), a fim de que y(t) seja igual ar(t), e:
Q(s) =1
H(s). (3)
Para evitar que Q(s) seja instavel, separa-se H(s) no produtode duas funcoes:
H(s) = H+(s)H−(s), (4)
sendo H+(s) uma funcao que contem os possıveis atraso ezeros de fase nao-mınima (zeros do lado direito do plano s) deH(s).
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 6/18

Introducao Procedimento Projeto de PID e IMC
Procedimento
Para melhor desempenho do ponto de vista do criterio IAE(Integral Average Error).
H+(s) = e−τs∏i
(−βis+ 1), (5)
sendo −βi os zeros do semi-plano direito de H(s).
Para melhor desempenho do ponto de vista do criterio ISE(Integral Square Error),
H+(s) = e−τs∏i(−βis+ 1)∏i(βis+ 1)
. (6)
Portanto, Q(s) torna-se
Q(s) =1
H−(s)(7)
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 7/18

Introducao Procedimento Projeto de PID e IMC
Exemplo
Para tornar Q(s) causal, portanto uma funcao possıvel de serimplementada, define-se uma forma aumentada de Q(s)atraves da utilizacao de um filtro F (s):
Q(s) =1
H−(s)F (s) (8)
sendo F (s) dado por:
F (s) =1
(αs+ 1)n(9)
e n suficientemente grande a fim de que Q(s) seja causal(uma funcao de transferencia propria).
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 8/18

Introducao Procedimento Projeto de PID e IMC
Procedimento
A selecao de α para o filtro F (s) que forma a equacao possuiinfluencia no desempenho nominal, na sensibilidade frente aperturbacoes e e na robustez a erros de modelagem dosistema em malha fechada.
O desempenho nominal do sistema em malha fechada e:
y(s) = Q(s)H(s)r(s), ou (10)
y(s) = H+(s)F (s)r(s). (11)
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 9/18

Introducao Procedimento Projeto de PID e IMC
Exemplo:
Determine o controlador C(s) para o processo H0(s) usandoo metodo IMC
H0(s) =−2s+ 1
(3s+ 1)(s+ 1)2
Assume-se aqui que H(s) = H0(s) (nao ha erros de modelo).
Procedimento:
H−(s) =1
(3s+ 1)(s+ 1)2
H+(s) = −2s+ 1
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 10/18

Introducao Procedimento Projeto de PID e IMC
Exemplo:
A funcao Q(s) e:
Q(s) =1
H−(s)F (s),
Q(s) =(s+ 1)2(s+ 3)
(αs+ 1)3.
Logo:
C(s) =Q(s)
1−Q(s)H(s)
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 11/18

Introducao Procedimento Projeto de PID e IMC
Exemplo:
Desempenho nominal:
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 12/18

Introducao Procedimento Projeto de PID e IMC
PID e IMC
O projeto de PID baseado na estrategia IMC esta emreescrever a funcao de C(s) de modo que esta se enquadre naestrutura PID, isto e:reescrever C(s), quando possıvel, em algum dos formatos:
C(s) = K +Ki
s+Kds, (12)
ou
C(s) =
(K +
Ki
s+Kds
)(1
as+ 1
), (13)
ou similar.
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 13/18

Introducao Procedimento Projeto de PID e IMC
Exemplo:
Determine o controlador C(s) para o processo H0(s) usandoo metodo IMC
H0(s) =1
(s+ 1)3
Assume-se aqui que H(s) foi aproximado como sendo
H(s) = e−1,17s 1
1, 829s+ 1
e que uma aproximacao de Pade foi utilizada para representaro atraso de transporte τ :
e−τs ≈− τ
2s+ 1τ2s+ 1
e−1,17s ≈=−0, 585s+ 1
0, 585s+ 1
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 14/18

Introducao Procedimento Projeto de PID e IMC
Exemplo:
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 15/18

Introducao Procedimento Projeto de PID e IMC
Exemplo:
Dado que:
H(s) =(−0, 585s+ 1)
(0, 585s+ 1)
1
(1, 829s+ 1)
tem-se (criterio ISE):
H+(s) =−0, 585s+ 1
0, 585s+ 1
H−(s) =1
1, 829s+ 1
e:
Q(s) =1, 829s+ 1
αs+ 1
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 16/18

Introducao Procedimento Projeto de PID e IMC
Exemplo:
O controlador C(s) e:
C(s) =Q(s)
1−Q(s)H(s)
ou
C(s) =(1, 829s+ 1)(0, 585s+ 1)
((α0, 585 + 1, 07)s+ (α+ 1, 829))s
o que pode ser reescrito como um PID e filtro.
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 17/18

Introducao Procedimento Projeto de PID e IMC
Exemplo:
desempenho nominal:
Gustavo H. C. Oliveira Internal Model Control (IMC) e PID 18/18