VIII Simpós;o Brasil~ro de AutomaçãoIntcligente...
6
.. • . .•. VIII: ._. VIII Simpós;o Brasil~ro de Automação Intcligente CN><~ .2. VIII Congresso Brasil~ro de Redes Neurais • I Simpós;o Brasileiro de Intcligência Computacional ::1\: Competi~ão Brasil~ra de Robótica -,. " .... "' .. / S ti 11 d4l o",t",O,o de! 2001
Transcript of VIII Simpós;o Brasil~ro de AutomaçãoIntcligente...

..•. .•.
VIII: ._. VIII Simpós;o Brasil~ro de Automação IntcligenteCN><~ .2. VIII Congresso Brasil~ro de Redes Neurais• I Simpós;o Brasileiro de Intcligência Computacional
::1\: Competi~ãoBrasil~ra de Robótica
-,. ".... "' ../
S ti 11 d4l o",t",O,o de! 2001

REDE DE SENSORES E ATUADORES SEM FIO PARA IRRIGAÇÃO COM TAXA VARIÁVEL
ANDRÉ TORRE-NETO', EVANDRO L. L. RODRIGUES2, RAFAEL A. FERRAREZI2, EDUARDO A.
SPERANZA'2, ALEXANDRE C. N. OLIVEIRA'
Laboratorio de Eletrônica e Desenvolvimento, CNPDIA, EMBRAPA I
Caixa Postal 741, /3560-970 São Carlos, SP, BRASIL
Departamento de Engenharia Elétrica, EESC, USP 2
Av. do Trabalhador São-carlense, 400, Centro, 13566-590 São Carlos, SP, BRASIL
E-mails: [email protected], evandro@sel. eesc. usp. br, ferrarezi@gmail. com,[email protected], [email protected]
Abstract - Brazil has lhe most important citrus production area in lhe world. The largest part of il is not yet trrigated. To increaseproductivity and 10 cornbat recent spreading of diseases, like sudden death, ihis scenario \ViII change and rnost of the greves will have10 be irrigated, Therefore, warer source conservation methods must be developed, avoiding waste of water and lowering the COSI withcnergy consumption 10 drive bombs for irrigation. Tlus is possible if lhe producer uses a site-specific irrigation systern. In lhe presentpaper we present lhe developrnent 01' a wireless fixed instrumentation (sensor and actuator network) and lhe related software tools toirrigare perennial crops site-specifically. Citrus crop production ís the fírst goal, and rnay be easily adjusted to other crops that use ir-ngauon
Keywo rtls - Precision agriculture, electronic instrurneruation, soil moisture mapping, siie-specific irrigation systern, wireless sensorand actuator network
Resumo - O Brasil possui a mais Importante área de produção de citros do mundo. A maior parte dela ainda não é irrigada. Paraaumentar a produtividade e combater a recente propagação de doenças, como a morte súbita, este cenário será modificado e a maioriadas plantações deverá ser irrigada. Assim, métodos para conservação de recursos hidricos devem ser desenvolvidos, evitando o des-perdício de água e diminuindo o custo com o consumo de energia para operação das bombas de irrigação. Isto é possível se o produ-tor utilizar um sistema de irrigação espacialmente diferenciado. Neste artigo, é mostrado o desenvolvimento de uma instrumentaçãolixa sem fio (rede de scnsores e atuadores) e suas respectivas ferramentas de soflware para irrigação de culturas perenes de maneiraespacialmente diferenciada. A primeira meta é a produção de citros, e o sistema deverá ser facilmente ajustado para outras culturasque utilizam Irrigação.
Palavras-chave-c- Agricultura de precisão, instrumentação eletrônica, rnapeamento da umidade do solo, sistema de irrigação espaci-almente diferenciado, rede de sensores e atuadores sem fio.
Introdução
A produção brasi leira de frutos foi de aproxima-damente 41.2 milhões de toneladas em 2005, o quesignifica a terceira posição em todo o mundo (FAOStatistical, 2005). A produção de citros tem urnagrande contribuição neste número (44%) e o suco delaranja representou 0.67% do total de exportação doBrasil neste mesmo ano. Mesmo assim, a maioria daárea de produção de laranja no país não é irrigada.Diante da necessidade de controlar doenças, comopor exemplo a morte súbita, e para aumentar a pro-dutividade, sistemas de irrigação instalados expandi-ram de 1.5% em 1999 para 10.2% do total da áreade produção de citros no país em 2004.
No Brasil, como em outros países, são cobradastarifas das propriedades pela utilização da água parairrigação. Além disso, seu uso é limitado em deter-minados períodos do ano, devido à sua escassez.Algumas experiências com rnapearnento de produti-vidade têm convencido muitos agricultores sobre aimportância da disponibilidade de água como sendoo principal fator na sua variação (Schüller, 1997).
Assim, a conservação dos recursos hídricos im-plica na necessidade de se desenvolverem métodospara rnaxim izar o uso eficiente da irrigação, comoum sistema de irrigação espacialmente diferenciado(Fraise et. al, 1995) (Sadler et.al, 1996), onde so-mente áreas com deficiência h ídrica são irrigadas,evitando assim o desperdício de água e também di-minuindo o custo com o consumo de energia paraacionamento de bombas para irrigação.
A lguns esforços em trabalhos de irrigação COIll
taxa variada vem sendo real izados por Torre-Neto,et. aI desde 2001.
O objetivo deste trabalho é apresentar os primei-ros resultados destes esforços, utilizando a tecnolo-gia de redes sem fio. Foi desenvolvido e implernen-tado um sistema de irrigação espacialmentediferenciado, baseado em uma rede sem fio desensores e atuadores. O sistema foi ideal izado paraser de baixo custo, con fiável e compatível com aspráticas locais de produção de citros e outrasculturas perenes, como o café. O foco do artigo édescrever o desenvolvimento da instrurnentação e asferramentas de software relacionadas.

2 Materiais e Métodos
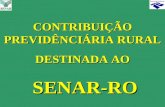
As redes de sensores e atuadores sem fio dispo-níveis no mercado ainda são, em sua maioria, utili-zadas para aplicações industriais e prediais, comcaracterísticas não totalmente favoráveis para utili-zação em campo agrícola. Sendo assim, uma redeproprietária de sensores e atuadores sem fio foi de-senvolvida para monitoramento e controle remoto deáreas agrícolas. O sistema é constituído de "nós sen-sores e atuadores", uma ou mais Estações de Campo(EC), uma Estação Base (EB) e um Kit de Instala-ção. A Figura I ilustra a arquitetura do sistema. Ca-da Estação de Campo cobre uma área de 100 hecta-res. A Estação Base é um com putador pessoal local i-zado no escritório da fazenda para gerenciamentoglobal da rede.
Áreas de Monitoramentoe Atuação
E~':;:O ""{/ - r:__f:r0!b.~Li"k'W;.F; ~
Estação de Campo»>.Gerenciamento I Controle : /'" '_', " \
~,~;::.;:~:.<!)
Figura I Arquitetura do Sistema de Irrigação a Taxa Variável
Os nós sensores e atuadores foram desenvolvidospara irrigação por gotejamento à taxa variável, base-ados em parâmetros do solo. Existe um nó sensorque mede a umidade e temperatura numa profundi-dade especifica e um nó atuador que controla válvu-las solenóides. Os nós foram desenvolvidos seguindoas seguintes premissas:
• Os nós sensores devem ser distribuídos emuma grade fixa padrão, com espaçamentode 40 metros entre eles, e posicionados soba copa das árvores;
• Os nós sensores devem ser aI irnentados porbaterias não-recarregáveis e devem durarpelo menos doze meses;
• Os nós atuadores devem ser aI imentadospor baterias recarregáveis e equipados compainéis solares, e devem ser posicionadospara receber a luz solar diretamente;
• Todos os nós devem ser resistentes a insu-mos químicos.
• A instalação, operação e manutenção dosnós devem ser o mais simples possível, dis-pensando uma equipe especializada.
Na implementação da rede de sensores e atuado-res sem fio, foram tomados os devidos cuidados paraevitar problemas como o consumo de energia, redu-ção no alcance de transmissão dos nós e a colisão depacotes de transm issão. Para isto, o modo de opera-ção dos nós e o protocolo de comunicação foramoti m izados para serem en ergeti cam en te eficien tes,além de seguirem algumas regras como as descritasabaixo:
• O protocolo de comunicação utiliza relaçõesassirnétricas do tipo mestre e escravo, queoperam no modo de comunicação pool /response, ou seja, os nós somente transmi-tem uma mensagem como resposta a umcomando da EC;
• Todos os nós são capazes de receber co-mandos da EC a qual estão associados, poisesta tem ma ior potênci a de tran sm issão;
• Os nós que não conseguirem transmitir di-retamente para a EC enviarão os dados paraoutros nós (por rotas fixas e/ou alternativas)de seu subconjunto, que irão retransmiti-lospara a EC correspondente;
• Os pacotes (mensagem + campos de contro-le) poderão ser divididos em pedaços meno-res para atender limitações do rádio e/ou damemória disponível.
Os rnódulos que fazem parte do sistema serãodescritos em seguida.
2.1 Nó Sensor
o nó sensor é o modulo que realiza aquisição dedados referentes aos parâmetros do solo, que serãoutilizados para modelar as zonas de manejo. Estesdados são de fundamental importância para a toma-da decisão do sistema de irrigação. Com uma pro-gramação pré-deterrninada os nós se comunicamcom a Estação de Campo, enviando dados dos sen-sores nele instalados e assim, proporcionam a cria-ção de mapas de um idade do solo espacialmentevariados.
A montagem básica do nó sensor é constituídapor um sensor capacitivo para a medida da umidadedo solo, sensores para as medidas da temperatura dosolo e do ar (circuitos integrados LM35DZ), umacaixa de alumínio com uma antena instalada na par-te superior, e hardware acondicionado no interior dacaixa. Seu circuito eletrônico é composto de um mi-crocontrolador (PICI6F88 da Microchip) que coleta,processa e armazena os dados dos sensores, e umtransceptor (transmissor + receptor) para comunica-ção sem fio por radiofreqüência em 916MHz (DR-

3000 da RF Monolithics), responsável por enviardados e receber comandos, além de outros compo-nentes discretos secundários. A alimentação do sis-tema é feita por uma bateria de Lítio de 3.6V cujaautonomia é de 12 meses. Optou-se pela escolha decomponentes com tecnologia "nanowatt" (baixo con-sumo), priorizando a economia de energia.
2.2 Nó Atuador
Os nós atuadores possuem hardware, software econstrução similares aos nós sensores. A principaldiferença é que possuem um circuito de interfacepara válvulas solenóides e medidores de fluxo. Umaponte H é utilizada para abrir e fechar as válvulas,devido às mesmas serem do tipo letching, e um cir-cuito é utilizado para condicional' o sinal do medidorde fluxo, que é conectado a um pino contador depulsos do microcontrolador. Os nós atuadores sãoalimentados com quatro células de bateria NiCd de1.2V, com capacidade de carga de 1000mAh, e porconsumirem mais energia que os nós sensores, sãoequipados com um painel solar foto-voltaico de Iwatt para recarga das baterias. O ciclo de funciona-mento, o intervalo de aquisição e a comunicação dedados dos nós amadores são os mesmos dos nós sen-seres.
2.3 Estação de Campo (EC)
As Estações de Campo são os elementos concentra-dores de dados da rede de sensores sem fio. Exercemas funções de receber, processar e enviar dados paraa Estação Base. O envio é feito por meio de cone-xões JDBC (Java Database Connectivity), mantendoo banco de dados da Estação Base sempre atualiza-do. Elas tam bém têm a função de repassar comandospara configurar a operação e atuação dos nós e reali-zar o rotearnento da rede de comunicação. A área decobertura do sinal de rádio de cada Estação de Cam-po é de aproximadamente 100 hectares, cobrindoaproximadamente 400 nós sensores com espaçarnen-to de 40 metros. O protocolo de comunicação dedados está preparado para rnonitorar 65 mil nós.
As Estações de Campo são compostas por umaCPU, uma rnini-estação climatológica, uma intcrfacede rede sem fio (WLAN) e um driver de comunica-ção com os nós. Além disso, são alimentadas porum conjunto de duas baterias autornotivas de 55Ah,recarregadas por um painel solar de 70 watts.
A CPU é um PC I04 baseado no processador NSGeode GX I, de 300 MHz e chipset NS CS5530A(PCM-3550 da Advantech), com 256 Megabytes dememória RAM e uma memória Compact Flash de IG igabyte funcionando como disco de sistema. Foiinstalado nessa memória o sistema operacional Li-nux, distribuição Slackware 10.2, com kernel 2.4, etodo software foi desenvolvido utilizando as lingua-gens de programação ANSI C e lava. A estação cli-
rnatológica é uma WMR-918 da Oregon Scientific,conectada em uma das duas portas seriais RS-232 doPC I04. A interface de rede sem fio é um AccessPoint da Level-One, modelo WAP-0003, conectadoao PC I04, e que por sua vez está conectado a umaantena externa direcional com 18 dBi de ganho, afim de estabelecer o link Wi-Fi com a Estação Base.Os serviços mais comuns do protocolo TCP/IP comoFTP, SMTP e SSH são utilizados para enviar e rece-ber dados, arquivos e comandos para e da EstaçãoBase. Os arquivos de con figuração são gerados noformato XML.
O driver de com un icação de dados é o ún icocomponente não comercial da EC. Ele foi desenvol-vido com um microcontrolador, conectado a um mo-dulo de rádio DR-3000 para transmissão e outropara recepção de dados dos nós, além de uma inter-face serial RS-232 para comunicação com a CPU doPC I04. Ele executa a porção de mais baixo nível doprotocolo de comunicação de dados. O nível de po-tência de transmissão é aumentado para 20 dB paraque a Estação de Campo possa ter um raio de abran-gência de aproximadamente 750 metros.
2.-I Estação Base
A Estação Base é utilizada para centralizar todas asoperações e dados do sistema. É composta por umcomputador pessoal e um Access Point externo paraacesso à rede sem fios (WLAN) da Level-One, mo-delo WAB-I OOOA, conectado a uma antena externaomni-direcional que realiza a comunicação com asEstações de Campo.
Uma base de dados espaço-temporal foi desen-volvida juntamente com um software de gerencia-mente com funcionalidades de Sistemas de Informa-ções Geográficas (SIG), para operar sobre o sistemae auxiliar na tomada de decisão para a irrigação àtaxa variada.
Essa base de dados, que utiliza o servidor Post-greSQL, de código Iivre e com extensão espacial(PostGIS), possui todas as informações referentes àsentidades do sistema, tais como coordenadas geográ-ficas de posicionamento global dos nós, modos deconfiguração e operação, bem como informaçõessobre a própria propriedade em que o sistema estejaimplantado.
O software de gerenciarnento foi desenvolvidoem C++ e as funcionalidades de SIG utilizadas fa-zem parte da biblioteca TerraLib, também de códigolivre, desenvolvida pelo I PE (Instituto Nacional dePesquisas Espaciais). Por meio desse software, épossível realizar programações da irrigação em doismodos distintos: convencional e inteligente.
No primeiro modo, as regiões que constituem asunidades de irrigação são fixadas na instalação dosistema e não devem ser modificadas. Este modopossibilita apenas a autornação do acionamento deválvulas.

Já no segundo modo, essas regiões são definidasde acordo com a observação de seqüências de mapasde umidade do solo, gerados pelo mesmo software,permitindo a caracterização de zonas de manejo pelopróprio usuário do sistema. A partir desta caracteri-zação, a malha hidráulica da irrigação na área emquestão deve ser reajustada ou projetada (no caso deinício de cultivo irrigado), para que as zonas forma-das possam ser irrigadas de maneira espacialmentediferenciada. Assim, o sistema permite que o usuá-rio opere sabendo onde, quando e quanto irrigar,mantendo cada região irrigada o mais próximo pos-sível da umidade do solo ideal, minimizando o con-SUIllO de água e energia elétrica sem afetar a produ-tividade.
2.5 Ki) de lnstalaçào
o Kit de Instalação tem como função a configuraçãodos nós da rede sem fio - sejam eles sensores ou atu-adores - no ato da instalação, na manutenção ouainda para real izar coletas imediatas de dados.
Ele consiste em um conjunto de softwares, queusam comunicação Bluetooth com GPS e um driverpara comunicação com os nós via radiofreqüência.Estes sofrwares proporcionam a coleta de dados geo-gráficos e alfanurnéricos, acesso às configurações efunções do nó, juntamente com a navegação porpontos georreferenciados.
Os softwares foram desenvolvidos na linguagemde programação SuperWaba com a plataforma E-clipse, visando a utilização pelos usuários finais.
3 Resultados e Discussão
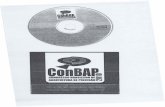
Uma unidade piloto de seis hectares foi instaladae colocada em operação para aval iação da operabili-dade do sistema em condições de campo. Foi sele-cionada uma plantação de laranja de 10 anos de vi-da. com árvores de 3 metros de altura. Há 25 nósscnsorcs e urna Estação de Campo em operação des-de janeiro de 2006. O sistema foi programado paraaquisição de dados a cada 15 minutos, e transmissãodos dados à Estação de Campo a cada hora. A Figu-ra 2 mostra um mapa de um idade do solo obtido pelainterpelação de dados dos 25 sensores em um mo-mento arbitrário. Por meio de mapas desse tipo, quefornecem informações espaço-temporais instantâ-neas de disponibilidade de água no solo, pode-severificar que o sistema é viável para mapearnento econtrole da irrigação.
Os próximos passos incluem a expansão destaun idade pi loto para 25 hectares, com 100 nós senso-res instalados nesta área, além da instalação dos nósatuadores que estão em fase final de testes em labo-ratório.
Seqüências de mapas de umidade do solo po-dem ser obtidas para cada área. O resultado esperadopela análise destes mapas é ter <1 área dividida em
=::z::::.· ,,':•..••
Figura ~ Mapa de urmdade do solo em um momento arbnrano
cinco ou mais zonas de manejo com diferentes ne-cessidades de irrigação. Estas zonas podem refletir avariabilidade espacial para a combinação de diferen-tes fatores como: textura do solo, topologia do solo enecessidades individuais de cada árvore. O sistemade irrigação poderia ser modificado para irrigar lo-cais específicos na plantação, de acordo com estaszonas de manejo. Para cada zona seria endereçadauma válvula automática estabelecendo um laço decontrole com seu próprio ponto de ajuste. Este pontode ajuste seria comparado com a média de umidadedo solo na zona, obtida pelo conjunto da rede desensores condizentes com a mesma. O consumo daágua seria avaliado por um medidor de fluxo auto-mático na entrada da área e comparado ao consumodas áreas convencionais autornatizadas.
4 Conclusão
Nesse trabalho foi descrito um sistema autornati-zado para controle espacialmente diferenciado dairrigação por gotejamento. O sistema foi construídocom componentes de baixo custo para mapear a u-midade do solo, monitorando temperaturas e contro-lando válvulas solenóides de acordo com a necessi-dade específica de agrupamentos pré-determinadosde árvores de um pomar de 25 hectares. O sistemapode ser remotamente controlado, e o comportamen-to de seus vários componentes mostrou-se confiável.
Agra deci men tos
Os autores agradecem à Fischer SI A Agropecuá-ria pela disponibilidade da área para instalação daunidade piloto; ao FUNDECITRUS. à UNB e àUNICAMP pela colaboração científica; e à FAPESP,pelo financiamento do projeto PIPE "Desenvolvi-mento de plataforma recnológica para irrigação deprecisão em culturas perenes", processo n .o
04/05464-6.

Referências Bibliográficas
17;\0 Statistical Databases. (2005), http://apps,fao.mQ.
Fraisse. C. \V .. Heerrnann , D. F., Duke, H. R.(1995). Sirnulation of variable water applicaiionwith linear-move inigation systems. Trans. ASAEv.38. n.5, p.1371-1376.
Sadler. E. J.. Camp, C. R., Evans, D. E., Usrey, L. J,(1996). lrrigation sysiern for coastal plain soils.Precision Agricuhnrc: Proceedings o/lhe ird lnter-national Conference. Minneapolis v.l , p.827-834.
Schüller, J. 1(. (1997). Technology for precision ag-riculture. European Conference 017 Precision Ag,.i-culture. v.1 p.33-44,
Torre-Neto, A .. Schüller, J. 1(., Harnan, D, Z.(200 I), Automated Systern for Variable Rate Mi-crosprink ler lrrigation in Citrus: A DernonstrationUnit. Proc. Third EI/,.opeClI7 Conference on Preci-sion Agricultnre. Montpellier, France June 18-20.p.725-730. CD-ROrvl.
Tmre-Neto, A., Fcnarczi R. A., Razera, D. E., Spe-ranza. E. A" Lopes, W. c., Lima, T. P. F. S., Rabel-10, L. M, Vaz, C. M. P. (2005). Wireless SensorNeiwork for Variable Rate lrrigation in Citrus. ln.7'" Fruit, NI/I anel Vegetable Production Engineer-il7g Symposinni. Montpellier, França.