
UNIVERSIDADE FEDERAL DE SÃO CARLOS - Deciv · 3. anÁlise dinÂmica utilizando o programa sap2000...
188
UNIVERSIDADE FEDERAL DE SÃO CARLOS CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA CIVIL Análise Dinâmica de Estruturas, utilizando o software SAP 2000 Lucas Tunis Martins Veloza Trabalho de Conclusão de Curso apresentado ao Departamento de Engenharia Civil da Universidade Federal de São Carlos como parte dos requisitos para a conclusão da graduação em Engenharia Civil Orientador: Prof. Dr. Alex Sander Clemente de Souza São Carlos 2009
Transcript of UNIVERSIDADE FEDERAL DE SÃO CARLOS - Deciv · 3. anÁlise dinÂmica utilizando o programa sap2000...
UNIVERSIDADE FEDERAL DE SÃO CARLOS
CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA CIVIL
Análise Dinâmica de Estruturas, utilizando o software SAP 2000
Lucas Tunis Martins Veloza
Trabalho de Conclusão de Curso apresentado ao Departamento de Engenharia Civil da Universidade Federal de São Carlos como parte dos requisitos para a conclusão da graduação em Engenharia Civil Orientador: Prof. Dr. Alex Sander Clemente de Souza
São Carlos 2009
DEDICATÓRIA
Dedico esta monografia a meus pais Sergio e Ivonir e ao irmão Sergio, que sempre me deram todo apoio que precisei.
AGRADECIMENTOS
Meus sinceros agradecimentos primeiramente a Deus. Ao Professor Dr. Alex Sander pelo apoio nos trabalhos de Iniciação Científica e neste TCC. A toda minha família. Aos meus amigos.
RESUMO
Atualmente vê-se o crescente desenvolvimento de novos materiais, técnicas construtivas, novos projetos, e como consequência as estruturas estão cada vez mais esbeltas. Aliado a isso, o uso de equipamentos vibratórios e atividades como: dança e aeróbica são cada vez mais comuns. A atuação desses fatores nos leva a ter uma preocupação com as vibrações e as respostas estruturais geradas sob essas novas solicitações, pois elas podem gerar desconforto aos usuários e até mesmo causar o colapso da estrutura. Atualmente a análise dinâmica já passa a ser indispensável para o cálculo de grandes estruturas, porém não existe um consenso da metodologia dessa análise entre as Normas existentes, e muitas ainda tratam o tema muito superficialmente. O presente trabalho teve como objetivo estudar o que são essas vibrações, quais suas causas e efeitos, como são feitas as modelagens matemáticas e metodologias de cálculo, quais são os critérios de aceitação de conforto e de utilização existentes, e principalmente abordar como são feitas as discretizações da estrutura pelo método dos elementos finitos e como calcular alguns parâmetros dessas vibrações no software SAP 2000. Foram descritos e analisados comparativamente alguns critérios de aceitação de vibrações propostos por pesquisadores estrangeiros e por algumas Normas Internacionais. Alguns exemplos analíticos foram feitos e posteriormente também resolvidos pelo software SAP 2000, houve uma comparação entre os resultados obtidos por cada um dos métodos. No software SAP 2000, foram realizados diversos exemplos comparativos, em alguns casos resolvia-se a mesma estrutura variando apenas o material dela, em outros casos variava-se apenas a seção transversal. Finalmente foi proposta a solução de uma laje maciça de concreto composta por pilares metálicos e por vigas metálicas pelo SAP 2000, para efeitos de comparação, em alguns exemplos variou-se a altura da laje, e em outros casos, a seção das vigas de bordo.
Palavras-chave: SAP 2000, Análise Dinâmica, Elementos Finitos.
ABSTRACT
ABSTRACT
Today we see the increasing development of new materials, construction techniques, new projects, and as a result the structures are increasingly slim. Allied to this, the use of vibrating equipment and activities such as dance and aerobics are increasingly common. The role of these factors leads us to be concerned with the vibrations and structural responses generated under these new demands, because they can cause discomfort to users and even cause the collapse of the structure. Currently, the dynamic analysis already becomes necessary for the calculation of large structures, but there is no consensus on the methodology of analysis of existing Standards, and many still treat the subject superficially. This study aimed to investigate what these vibrations, its causes and effects, how it's done mathematical modeling and calculation methods, which are the acceptance criteria of comfort and use of existing, and mostly deal with how it's done discretizations of the structure by finite element method and how to calculate some parameters of these vibrations in SAP 2000. Were described and analyzed in comparison some acceptance criteria proposed by vibrations foreign researchers and some International Standards. Some analytical examples were made and later also solved by SAP software in 2000, there was a comparison between the results obtained by each method. In SAP 2000, were conducted several comparative examples, in some cases resolved to the same structure, varying only the material of it, in other cases varied only the cross section. Finally it was proposed to settle a slab of concrete composed of metallic pillars and girders by SAP 2000 for the purpose of comparison, in some instances varied the height of the slab, and in other cases, the section of the beams on-board. Key-words: SAP 2000, Dynamic Analysis, Finite Element Method.
SUMÁRIO
1. INTRODUÇÃO ........................................................................................................................1
1.1 JUSTIFICATIVA ..........................................................................................................................1
1.2 OBJETIVOS ...............................................................................................................................2
1.3 METODOLOGIA ..........................................................................................................................3
2. CONCEITOS FUNDAMENTAIS .............................................................................................4
2.1 REVISÃO BIBLIOGRÁFICA ..........................................................................................................4
3. ANÁLISE DINÂMICA UTILIZANDO O PROGRAMA SAP2000. ........................................ 43
3.1 APRESENTAÇÃO E DESCRIÇÃO DO PROGRAMA ........................................................................ 43
3.1.1 DESCRIÇÃO DO PROGRAMA .................................................................................................... 44
3.1.2 DESCRIÇÃO DO MODELO ESTRUTURAL .................................................................................... 44
3.1.3 ANÁLISE MODAL .................................................................................................................... 45
3.2 ANÁLISE DINÂMICA ANALÍTICA DE ESTRUTURAS ..................................................................... 47
3.2.1 1º CASO – VIBRAÇÃO SOMENTE COM FORÇA RESTAURADORA .................................................. 51
3.2.2 2º CASO – FORÇA RESTAURADORA LINEAR E FORÇA HARMÔNICA ........................................... 58
3.2.3 3º CASO – VIBRAÇÕES COM FORÇA RESTAURADORA LINEAR E COM AMOR- TECIMENTO VISCOSO...... ....................................................................................................................................... 61
3.2.4 4º CASO – VIBRAÇÕES COM AMORTECIMENTO VISCOSO, FORÇA RESTAURADORA LINEAR E COM A APLICAÇÃO DE UMA CARGA HARMÔNICA. .............................................................................................. 64
3.3 EXEMPLOS ANALÍTICOS RESOLVIDOS PASSO A PASSO NO SAP2000 .................... 68
3.3.1 SOLUÇÃO DO PRIMEIRO EXEMPLO PELO SAP2000 .................................................................. 68
3.3.1.1 COMPARAÇÃO DA ESTRUTURA RESOLVIDA NO SAP2000 COM A RESOLVIDA MANUALMENTE ..... 93
3.3.2 SOLUÇÃO DO SEGUNDO EXEMPLO PELO SAP2000 .................................................................... 93
3.3.2.1 RESPOSTAS DAS SOLUÇÕES DO PROBLEMA E COMPARAÇÃO COM O CASO MANUAL ................ 937
3.3.3 RESOLUÇÃO DO TERCEIRO EXEMPLO UTILIZANDO O SAP2000. .............................................. 103
4. APLICAÇÕES .................................................................................................................... 112
4.1 VIGAS .................................................................................................................................. 112
4.1.1 EXEMPLO DE UMA VIGA ENGASTADA ..................................................................................... 112
4.1.1.1 ANÁLISE DOS GRÁFICOS ....................................................................................................... 112
4.1.2 ESTUDO DE VIGA COM SEÇÃO METÁLICA ................................................................................ 118
4.2 COMPARAÇÃO DAS MUDANÇAS DE FREQUÊNCIAS PELA MUDANÇA DOS MATERIAIS .................. 121
4.3 ESTUDO DE VIGA COM VÁRIOS GRAUS DE LIBERDADE ............................................................. 122
4.3.1 EXEMPLO PRÁTICO ............................................................................................................... 124
4.3.2 COMPARAÇÃO ENTRE RESULTADOS ...................................................................................... 131
4.3.3 EXEMPLO DE UM PAVIMENTO SISTEMA MISTO (AÇO – CONCRETO) ........................................... 131
4.3.3.1 PRIMEIRO CASO ................................................................................................................... 131
4.3.3.2 SEGUNDO CASO – MODIFICANDO A VIGA DE BORDO ............................................................... 131
4.3.3.3 TERCEIRO CASO .................................................................................................................. 131
4.3.3.4 COMPARAÇÃO ENTRE OS TRÊS PRIMEIROS CASOS - SOMENTE VARIAÇÃO DAS VIGAS DE
BORDO............................................................................................................................................. 131
4.3.3.5 QUARTO CASO – MODIFICANDO A ALTURA DA LAJE............................................................ . 131
4.3.3.6 QUINTO CASO – MODIFICANDO A ALTURA DA LAJE.......................... ..................................... 131
4.3.3.7 COMPARAÇÃO ENTRE O PRIMEIRO, QUARTO E QUINTO CASOS - VARIAÇÃO DA ALTURA DA
LAJE............................................................................................................................................ .. 1314
5. CONCLUSÕES .................................................................................................................. 176
6. REFERÊNCIAS ................................................................................................................. 178


1
1. INTRODUÇÃO
As tendências de construção civil que vão à direção de estruturas mais leves e com
vãos mais longos, combinadas com uma redução de amortecimento e o aparecimento de
novas atividades, como aeróbicas, danças, acabaram por resultar num significante aumento
no número de reclamações sobre as vibrações. Este fato fez com que o grau de atenção
sobre os efeitos de vibrações estruturais aumentasse sobre as condições de reduzir,
prevenir e projetar estruturas.
Atividades feitas pelos ocupantes das edificações podem causar vibrações
perceptíveis na edificação. Dentre estas atividades estão: caminhar, dançar, pular, aeróbica,
participação pública em concertos musicais ou atividades esportivas. O funcionamento de
aparelhos mecânicos também são causadores destas vibrações, são eles: máquinas de
lavar, sistemas de ventilação e ar condicionado, aquecedores, etc.
As análises dinâmicas realizadas nas estruturas atualmente são feitas por meio de
softwares específicos que possibilitam o cálculo das freqüências naturais da estrutura, dos
modos de vibração, dos deslocamentos e das cargas. Os métodos computacionais, em sua
grande parte, baseiam-se na discretização da estrutura por meio do método dos elementos
finitos, método que discretiza a estrutura em determinado número finito de nós. Com o
método de elementos finitos, os resultados obtidos dependem de quanto maior for o número
de nós que se discretiza na estrutura, assim, quanto mais nós maior a precisão.
Vê-se que as tendências atuais em considerar os efeitos das vibrações para o
dimensionamento das estruturas estão aumentando consideravelmente, vendo que já
ocorreram diversos acidentes devido os calculistas desprezarem esses efeitos para o
dimensionamento.
1.1 JUSTIFICATIVA
Com o crescente desenvolvimento de novos materiais, técnicas construtivas e de
projeto, os edifícios estão se tornando cada vez mais esbeltos. Aliado a isso, o uso de
equipamentos vibratórios e atividades com danças e aeróbica são cada vez mais comuns
2
nas edificações de uso geral. Estes fatos têm aumentado a preocupação e os problemas
com vibrações nas edificações, pois as respostas estruturais sob essas novas solicitações
podem causar desconforto aos usuários, e até o colapso da estrutura. Assim a análise das
vibrações se tornou indispensável atualmente, constando e sendo exigida pela maioria das
normas de projeto estrutural, mostrando assim a importância deste trabalho.
A análise das vibrações das estruturas nada mais é do que a análise dinâmica da
mesma. Essa análise dinâmica quando realizada por meios de softwares computacionais,
como SAP 2000 é muito mais precisa do que a realizada por meio de cálculos manuais,
devido ao fato que a modelagem matemática para a resolução destes sistemas envolve uma
imensa quantidade de equações diferenciais matriciais (quanto maior a precisão, maior
deverá ser o número de pontos discretizados na estrutura, e quanto mais o número de
elementos discretizados, maior o número de equações), e somente com o auxílio de
sistemas computacionais é possível obter uma resposta satisfatória num curto espaço de
tempo, assim então se justifica aqui o uso do software para este trabalho.
1.2 OBJETIVOS
O objetivo do trabalho de conclusão de curso é de que se consiga propor exemplos
numéricos e práticos de diversas estruturas e efetuar sua análise dinâmica em softwares
existentes como SAP 2000, para isso haverá o uso de todo embasamento teórico adquirido
anteriormente em um trabalho de iniciação científica sobre análise de vibrações estruturais.
Os exemplos numéricos serão realizados em diversas vigas (engastadas, apoiadas,
etc.), uma caixa d’água, um pavimento e outras estruturas. Com o auxílio do software, será
possível calcular vários dados da estrutura como: seus modos de vibração, freqüências
naturais, reações e esforços. Ressalta-se que serão feitos diversos exemplos de vigas com
variações dimensionais (modulo de elasticidade, largura, altura, vão, rigidez específica) para
que assim possam ser comparados os resultados obtidos no programa (freqüências, modos
de vibração) com as características dimensionais das vigas, sendo o objetivo disto
realmente conseguir estabelecer um parâmetro de comparação ente as características da
viga com seus modos de vibração e freqüências.
Também haverá uma comparação entre os resultados que se obter calculando a
estrutura manualmente (estruturas com menor número de elementos discretizados) e com o
uso do software. O objetivo disto está em observar uma grandeza de comparação entre os
erros que se obtém no uso do software e do cálculo manual e também poder detalhar as
metodologias adotadas nos programas comerciais para as análises dinâmicas.
3
Com os vários dados já obtidos dos exemplos numéricos, será realizado também
para alguns casos a análise de alguns dos critérios de aceitação para vibrações quanto ao
conforto dos usuários.
1.3 METODOLOGIA
A metodologia deste trabalho consiste em explicar através de exemplos simples de
lajes, vigas e outras estruturas de aço e concreto, como são feitas as modelagens destas
estruturas em programas computacionais como SAP 2000, como são obtidos os resultados,
e o que esses resultados obtidos siguinificam para a estrutura estudada.
Primeiramente, na parte das referências bibliográficas deste trabalho, será dada uma
explicação geral dos tipos de vibrações existentes, dos tipos de carregamentos dinâmicos
existentes, e toda a conceituação de modelagem matemática existente para o cálculo
dessas vibrações. Esta explicação geral é fundamental para o entendimento de todo este
Trabalho de Conclusão de Curso.
Será feito um exemplo de uma estrutura calculada manualmente, com várias
discretizações, após isso, essa mesma estrutura será calculada pelo uso do software
SAP2000 e os resultados serão comparados para que se possa mostrar as discrepâncias
entre os cálculos manuais e cálculos computacionais.
Serão realizados diversos exemplos de vigas, lajes e estruturas com diferentes
solicitações, diferentes rigidez e diferentes vãos, para que se possa fazer uma comparação
da variação das características de freqüências naturais e vibracionais para cada tipo de
caso. Lembra-se que para algumas destas estruturas calculadas, será feito uma análise
específica de alguns casos dos critérios de aceitação de vibrações nas estruturas, quanto ao
conforto humano.
Posteriormente, será explanado todas essas comparações numa conclusão final do
trabalho.
4
2. CONCEITOS FUNDAMENTAIS
Neste capítulo procura-se explicar os conceitos fundamentais da análise dinâmica
através de revisões bibliográficas.
2.1 REVISÃO BIBLIOGRÁFICA
Segundo o trabalho de iniciação científica de Veloza (2008)*, será dada uma
abordagem inicial sobre os tipos de vibrações existentes, sua conceituação como segue
abaixo:
Cientificamente vibrações são fenômenos mecânicos onde certas características de
movimento de um corpo ou ponto material se repetem permanentemente em torno de uma
posição de equilíbrio, se a repetição for periódica e uniforme dizemos que são vibrações
periódicas, se não, são não – periódicas, o terremoto é um bom exemplo de vibração
periódica e a explosão de uma bomba ou batida de um carro na estrutura é um exemplo de
vibração não periódica (impacto).
As vibrações estão presentes na maioria das máquinas e estruturas e são
indesejáveis, pois causam movimentos desnecessários, ruídos, tensões dinâmicas (que
dependendo pode até levar uma estrutura à ruptura), desconforto e sensação de
insegurança para os usuários e perdas de energia que acompanham essas vibrações.
Geralmente criam-se vibrações quando um corpo sai da sua posição de equilíbrio
estável, e devido a forças restauradoras, o sistema tende a retornar à sua posição de
equilíbrio original, porém esse corpo retorna com certa velocidade, assim este processo fica
se repetindo tornando o movimento oscilatório em torno da posição de equilíbrio, até que se
atinja uma estabilidade.
Podem-se classificar as vibrações nos seguintes tipos:
• Vibrações Amortecidas: existe a presença de forças restauradoras,
dependendo se o amortecimento for muito grande podem nem ocorrer
vibrações;
* Trabalho de Iniciação Científica Realizado pelo próprio autor em 2008, Análise dinâmica de estruturas.
5
• Vibrações não Amortecidas: não existe nenhuma força restauradora;
• Vibrações forçadas: Ações devido a uma força periódica aplicada ao
sistema;
Dentre os fatores mais importantes que ocasionam vibrações em estruturas
destacam-se:
• Ação dinâmica do vento;
• Ações sísmicas;
• Carregamentos desbalanceados;
• Movimentação de veículos;
• Movimentos devidos ao caminhar e dançar de público;
Os carregamentos dinâmicos são aqueles carregamentos que variam suas
aplicações com o tempo, à resposta de uma estrutura sujeita a qualquer carregamento
dinâmico é expressa em termos de deslocamento da estrutura em função com o tempo.
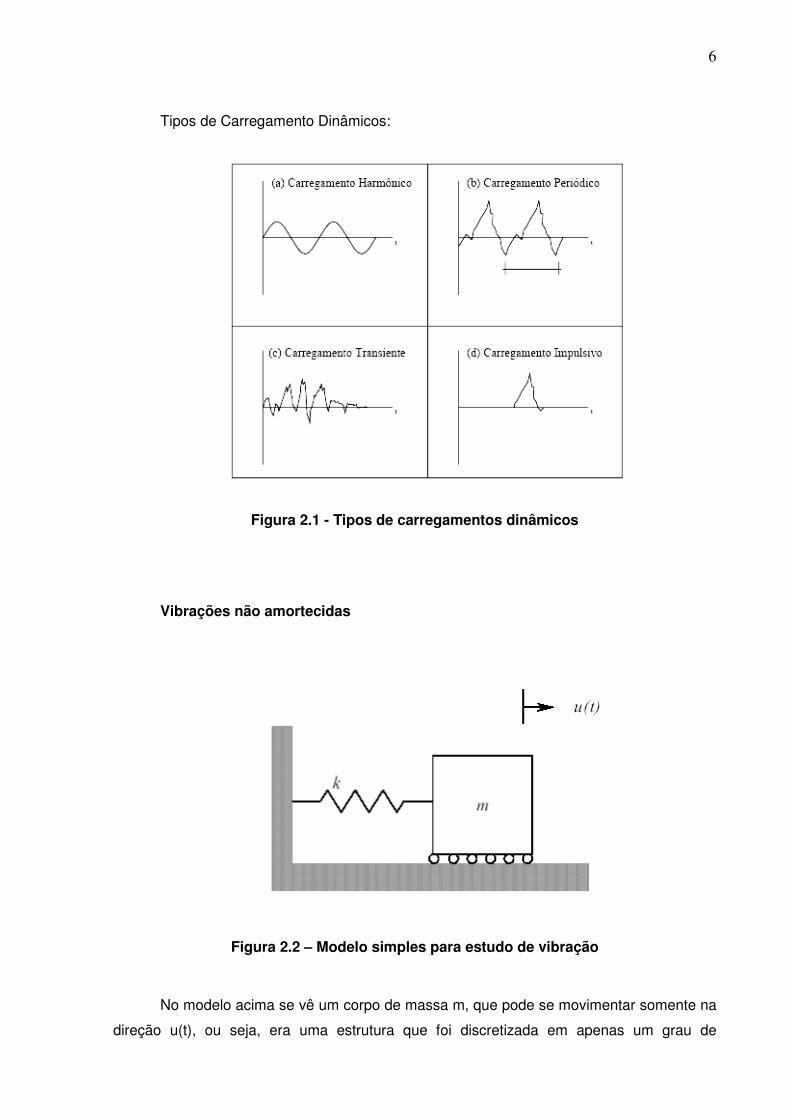
Abaixo se mostram alguns exemplos de carregamentos dinâmicos, a figura 2.1 (a)
mostra o esquema básico de um carregamento muito simples que é o Harmônico Simples
como o senóide, já a figura 2.1 (d) mostra o exemplo de um carregamento impulsivo, de
impacto, como o caso de uma batida de carro ou explosão de uma bomba como já foi citado
anteriormente.
6
Tipos de Carregamento Dinâmicos:
Figura 2.1 - Tipos de carregamentos dinâmicos
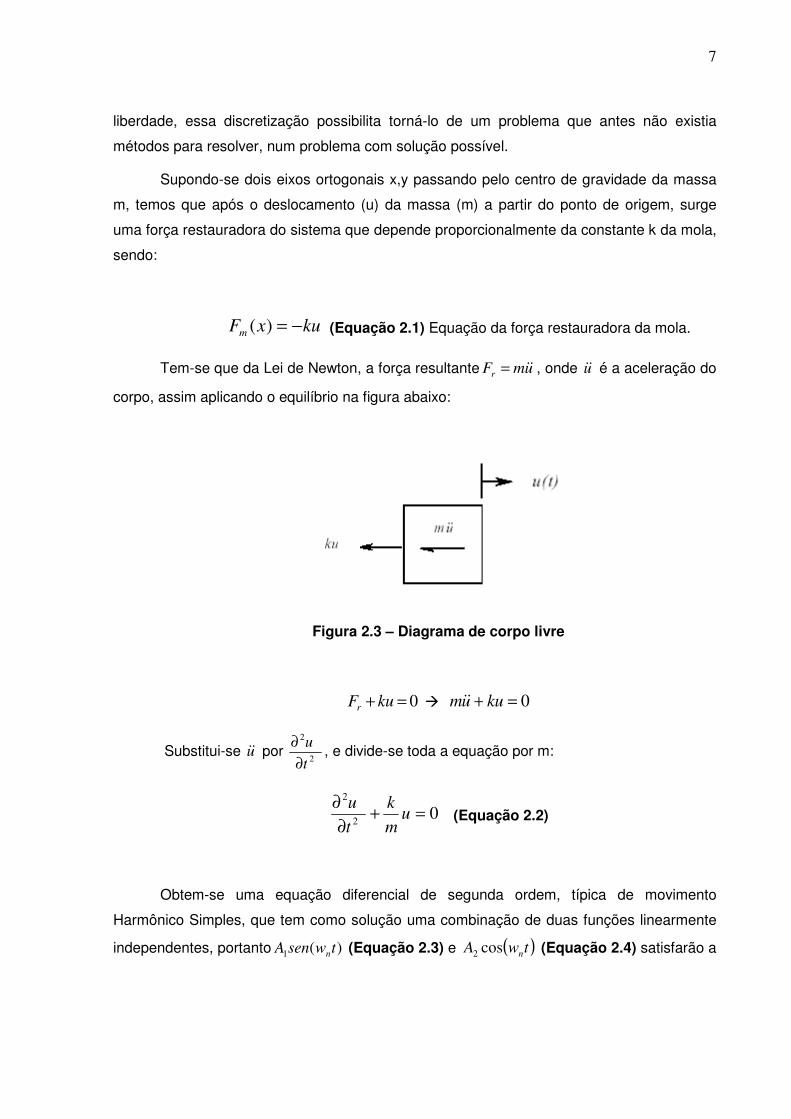
Vibrações não amortecidas
Figura 2.2 – Modelo simples para estudo de vibração
No modelo acima se vê um corpo de massa m, que pode se movimentar somente na
direção u(t), ou seja, era uma estrutura que foi discretizada em apenas um grau de
7
liberdade, essa discretização possibilita torná-lo de um problema que antes não existia
métodos para resolver, num problema com solução possível.
Supondo-se dois eixos ortogonais x,y passando pelo centro de gravidade da massa
m, temos que após o deslocamento (u) da massa (m) a partir do ponto de origem, surge
uma força restauradora do sistema que depende proporcionalmente da constante k da mola,
sendo:
kuxFm −=)( (Equação 2.1) Equação da força restauradora da mola.
Tem-se que da Lei de Newton, a força resultante umFr&&= , onde u&& é a aceleração do
corpo, assim aplicando o equilíbrio na figura abaixo:
Figura 2.3 – Diagrama de corpo livre
0=+ kuFr 0=+ kuum &&
Substitui-se u&& por 2
2
t
u
∂
∂, e divide-se toda a equação por m:
02
2
=+∂
∂u
m
k
t
u (Equação 2.2)
Obtem-se uma equação diferencial de segunda ordem, típica de movimento
Harmônico Simples, que tem como solução uma combinação de duas funções linearmente
independentes, portanto )(1 twsenA n (Equação 2.3) e ( )twA ncos2 (Equação 2.4) satisfarão a

8
equação, o que pode ser demonstrado por meio de substituição. Tem-se que A1 e A2 são
duas constantes de integração, e wn é uma constante que vale: m
k [Rad/s],
Assim a solução é:
( ) ( )twAtwsenAu nn cos21 += (Equação 2.5)
Nesta equação tem-se o movimento do corpo em função do tempo, para descobrir a
velocidade deriva-se a Equação 2.5 pelo tempo uma vez, e para encontrar a aceleração
basta a deriva-se duas vezes em relação ao tempo, e obtem-se:
( ) ( )twsenwAtwwAu nnnn 21 cos −=& (Equação 2.6)
( ) ( )twwAtwsenwAu nnnn cos22
21 −−=&& (Equação 2.7)
Estas equações podem ter significativa importância para a resolução de problemas,
pois podem ser aplicadas como condições de contorno para que sejam encontradas as
constantes A e B citadas anteriormente.
Um exemplo tem-se um corpo com 0uu = e 0uu && = em um instante de tempo t = 0,
teremos substituindo esses valores nas expressões 2.6 e 2.7 que:
A2 = 0u (Equação 2.8)
m
k
uA 0
1
&= (Equação 2.9)
Assim a expressão do deslocamento em função do tempo ficará:
9
+
= t
m
ksen
m
k
ut
m
kuu 0
0 cos&
(Equação 2.10)
Percebe-se que a equação deduzida é feita para uma mola, que não é o caso
especifico que desejamos estudar, porém ela pode ser usada para todos os casos em que
existir uma força restauradora. Para isso deve-se achar o valor da constante do outro
material a ser estudado, chamada de constante de mola equivalente Ke, que para realizar
sua medição, é aplicada uma força na estrutura e medida sua deflexão estática δ .
δ
FKe = (Equação 2.11)
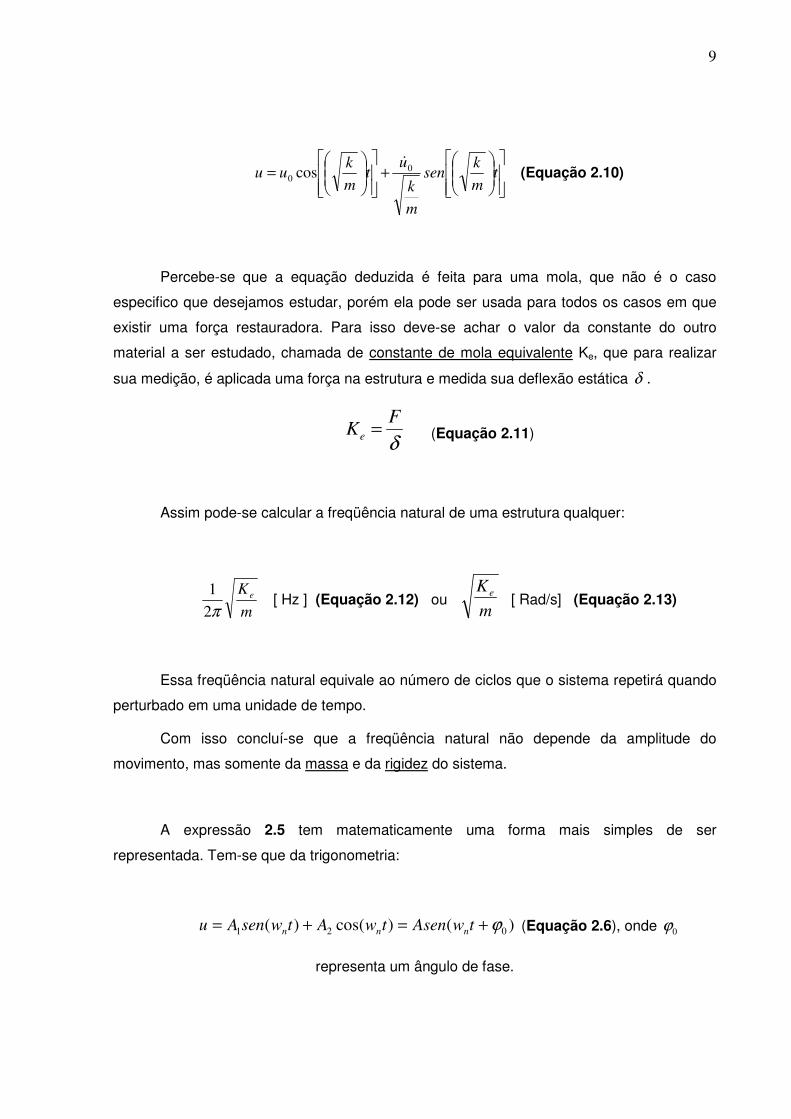
Assim pode-se calcular a freqüência natural de uma estrutura qualquer:
m
K e
π2
1 [ Hz ] (Equação 2.12) ou
m
Ke [ Rad/s] (Equação 2.13)
Essa freqüência natural equivale ao número de ciclos que o sistema repetirá quando
perturbado em uma unidade de tempo.
Com isso concluí-se que a freqüência natural não depende da amplitude do
movimento, mas somente da massa e da rigidez do sistema.
A expressão 2.5 tem matematicamente uma forma mais simples de ser
representada. Tem-se que da trigonometria:
)()cos()( 021 ϕ+=+= twAsentwAtwsenAu nnn (Equação 2.6), onde 0ϕ
representa um ângulo de fase.

10
Assim, a determinação de A e 0ϕ , a partir do conhecimento de A1 e A2, pode ser
feita com algumas manipulações matemáticas com o auxilio dos Vetores Girantes de
Fresnel, assim:
22
21 AAA += (Equação 2.14)
2
10
A
Aarctg=ϕ (Equação 2.15)
A partir das derivadas da equação 2.6, obtem-se as equações de velocidade e
aceleração:
)cos( 0ϕ+== twAwvu nn& (Equação 2.16)
)(² 0ϕ+−== twAsenwau nn&& (Equação 2.17)
O intuito da simplificação da equação 2.5 para as outras equações, deve-se ao fato
de que com estas Funções Horárias do Espaço,Velocidade e Aceleração podem ser feitas
analogias a partir da projeção delas num movimento circular:
11
Figura 2.4 – Analogia com o movimento circular.
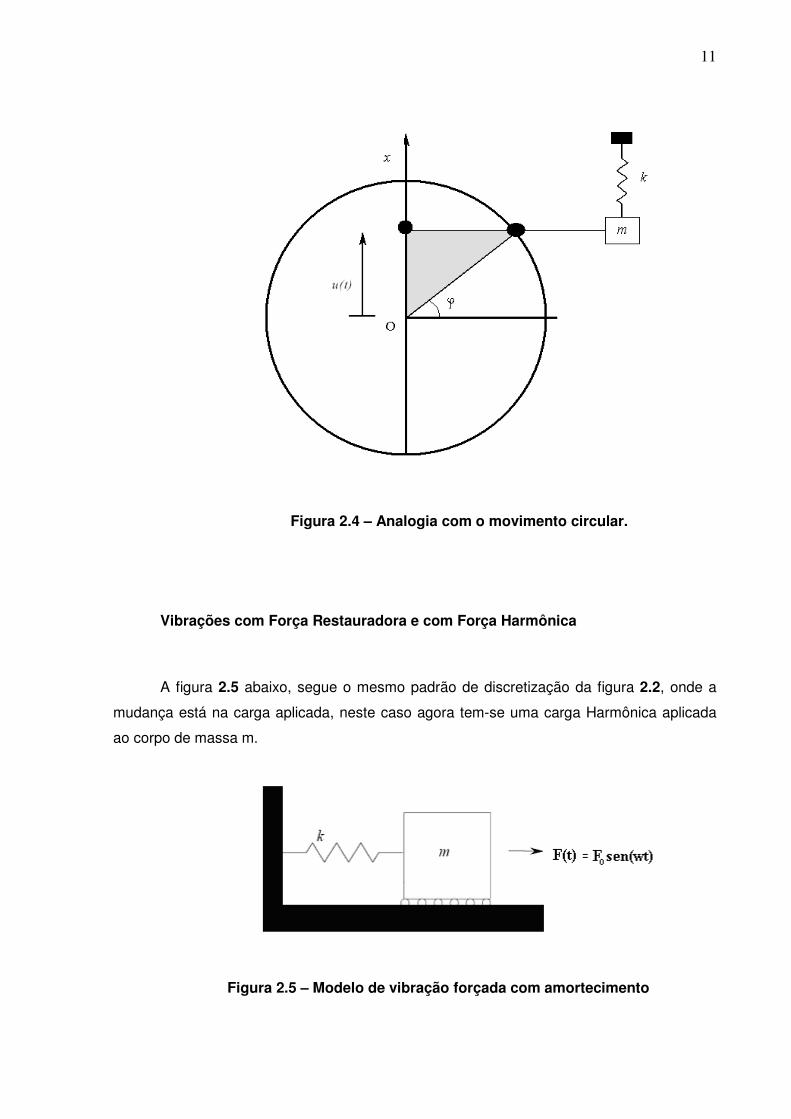
Vibrações com Força Restauradora e com Força Harmônica
A figura 2.5 abaixo, segue o mesmo padrão de discretização da figura 2.2, onde a
mudança está na carga aplicada, neste caso agora tem-se uma carga Harmônica aplicada
ao corpo de massa m.
Figura 2.5 – Modelo de vibração forçada com amortecimento

12
Tem-se neste caso temos uma força senoidal atuando sobre a mola, com freqüência
(w) e amplitude (F0).
Aplicando-se as condições de equilíbrio temos:
( )wtsenFkut
um02
2
+−=∂
∂ (Equação 2.18) dividindo por m
( )wtsenm
Fu
m
k
t
u 02
2
=+∂
∂ (Equação 2.19)
A equação 2.19 é diferencial não-homogênea que tem como resultado a combinação
de uma equação homogênea mais uma equação particular.
Para se obter a solução particular pega-se up = A3sen(wt) que é aplicado na equação
2.19 para achar o valor de A3, assim:
)/(
)/(2
03
wmk
mFA
−= (Equação 2.20)
A solução homogênea é:
+
= t
m
ksenAt
m
kAuh 21 cos (Equação 2.21)
A solução geral da equação não homogênea fica:
)()/(
)/(cos
20
21 wtsenwmk
mFt
m
ksenAt
m
kAug
−+
+
= (Equação 2.22)
Com o exemplo de os um corpo com 0uu = e 0uu && = em um instante de tempo t = 0,
tem-se ao substituir esses valores na expressão 2.22 que:
13
02 uA =
m
kwmk
mwF
m
k
uA
)/(
)/(
2
001
−
−=&
(Equação 2.23)
Observa-se que na equação geral u varia em função do tempo com a superposição
de dois movimentos harmônicos, um de freqüência w (função de excitação) e outro com a
freqüência wn (freqüência natural). Tem-se que geralmente w e wn são diferentes.
O movimento se divide em transiente, que é a parte correspondente à solução
homogênea, e em permanente, que corresponde à parte da solução particular.
Pode-se simplificar a parte permanente do movimento com a seguinte expressão:
)()/(1
/2
0 wtsenww
kFu
n
p−
= (Equação 2.24)
Observando a eq. 2.24, vê-se que o fator 20
)/(1
/
nww
kF
− dá a amplitude do
movimento, e assim analisa-se a variação desta amplitude utilizando um gráfico onde no
eixo y está a amplificação e no eixo x está a relação entre freqüência de excitação e
freqüência natural.
Assim é fácil observar que quando a relação entre a freqüência de excitação e a
freqüência natural é igual a um, ocorre um fenômeno que deve ser analisado
cuidadosamente: ressonância, ou seja, o fator de amplificação da onda tende a infinito, o
que pode levar uma estrutura a movimentações excessivas e até a ruína.
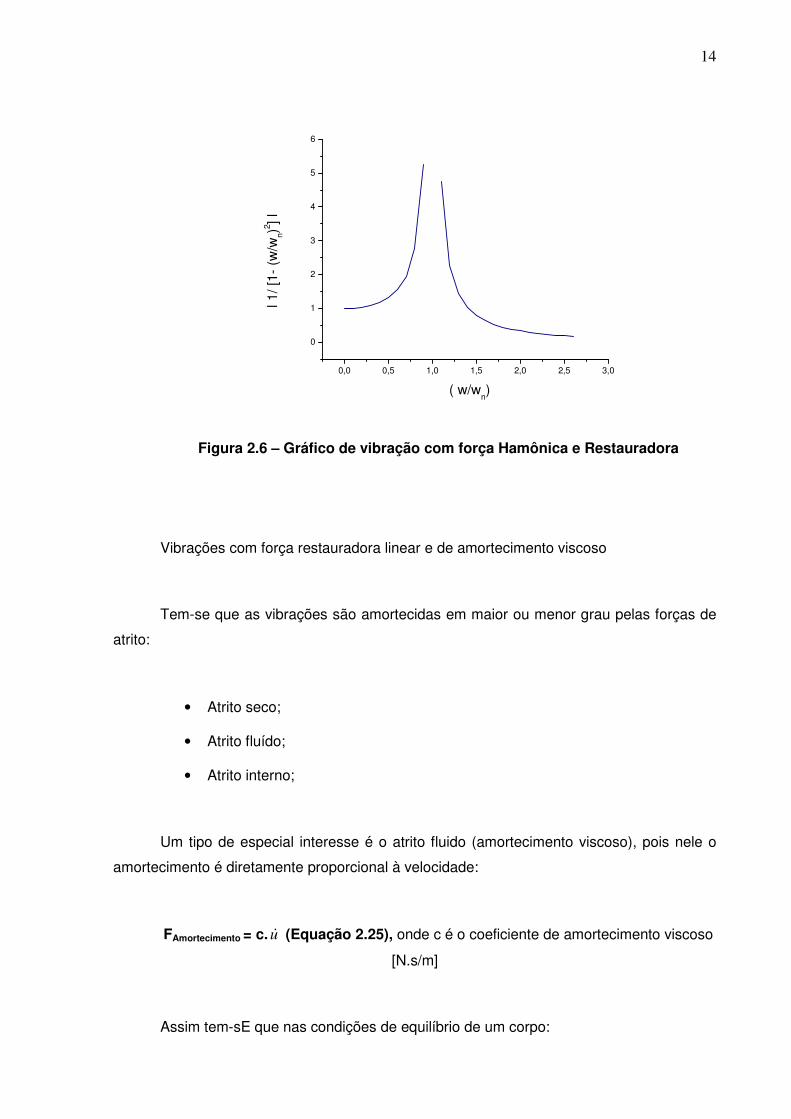
Abaixo segue um gráfico do fator de amplificação 20
)/(1
/
nww
kF
− versus a relação
entre as freqüências nw
w, levando em consideração que 10 =
k
F :
14
0,0 0,5 1,0 1,5 2,0 2,5 3,0
0
1
2
3
4
5
6
l 1/ [
1- (
w/w
n)2 ] l
( w/wn)
Figura 2.6 – Gráfico de vibração com força Hamônica e Restauradora
Vibrações com força restauradora linear e de amortecimento viscoso
Tem-se que as vibrações são amortecidas em maior ou menor grau pelas forças de
atrito:
• Atrito seco;
• Atrito fluído;
• Atrito interno;
Um tipo de especial interesse é o atrito fluido (amortecimento viscoso), pois nele o
amortecimento é diretamente proporcional à velocidade:
FAmortecimento = c.u& (Equação 2.25), onde c é o coeficiente de amortecimento viscoso
[N.s/m]
Assim tem-sE que nas condições de equilíbrio de um corpo:

15
02
2
=∂
∂++
∂
∂
t
ucku
t
um (Equação 2.26)
Esta é uma equação diferencial de segunda ordem, onde a solução pode ser duas
funções independentes com duas constantes arbitrarias.
Assim por teste:
tCeu λ= (Equação 2.27), onde C é uma constante.
Colocando a equação 2.22 na 2.21, temos:
02 =++m
k
m
cλλ (Equação 2.28)
m
k
m
c
m
c−
±
−=
2
2λ (Equação 2.29)
Está é uma equação de segundo grau, que possui três tipos possíveis de soluções
para a equação diferencial homogênea. Para ajudar na definição de qual caso a estrutura se
encontra, define-se aqui uma fórmula para um coeficiente de amortecimento crítico:
ncr mwkmc 22 == (Equação 2.30)
Chama-se ncr mw
c
c
c
2==ζ de Fator de Amortecimento.
Assim, sendo c’ for o coeficiente de amortecimento da estrutura:
• c’< ccr tem-se um movimento Subamortecido
• c’> ccr tem-se um movimento Superamortecido
• c’= ccr tem-se um movimento de Amortecimento Crítico
16
1º caso: Superamortecido
Tem-se que se na expressão 2.29 0>∆ , temos duas soluções distintas 1λ e 2λ
que pertencem ao conjunto dos Reais, onde o movimento fica:
tteCeCu 21
21λλ += (Equação 2.31)
Onde se percebe que se o tempo tende a infinito o deslocamento tende a zero sem
que ocorra nenhuma oscilação. O que é representado no gráfico abaixo:
Des
loca
men
to
Tempo
Modelo Superamortecido
Figura 2.7 – Gráfico de movimento Superamortecido
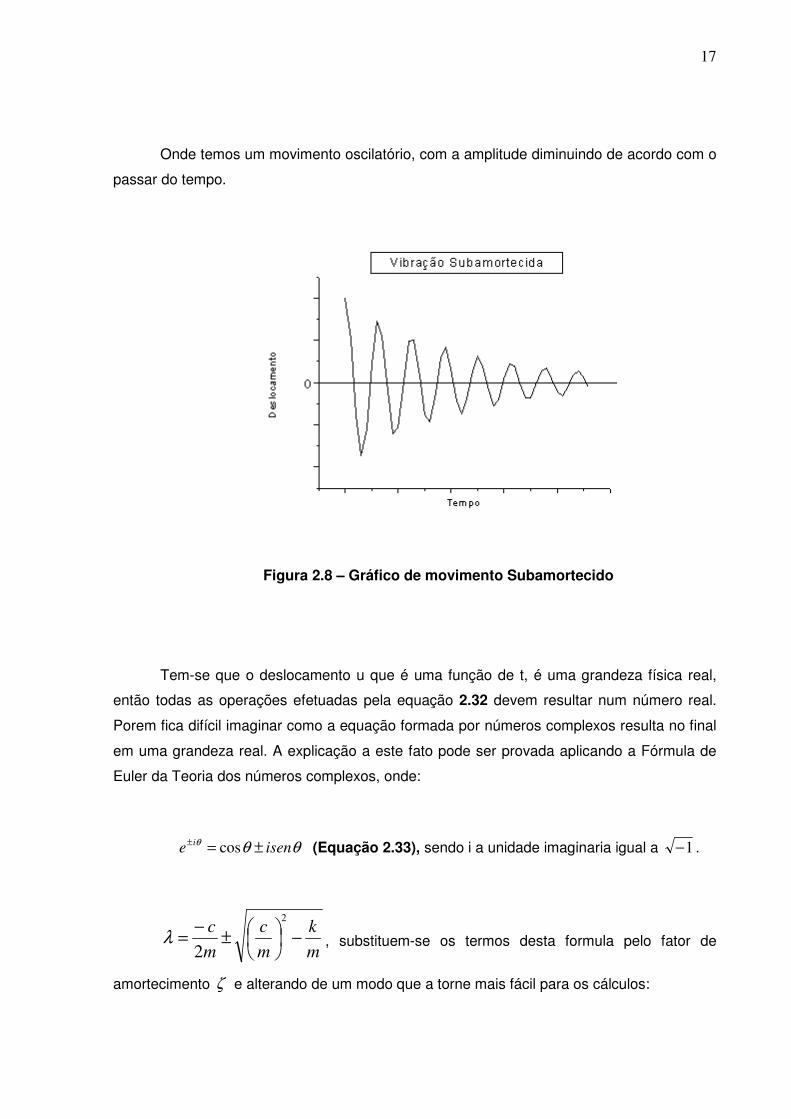
2º caso: Subamortecido
Neste caso temos que na expressão 2.29 0<∆ , assim temos também duas
soluções distintas 1λ e 2λ , porém elas pertencem ao conjunto dos números Complexos, e o
movimento fica:
tteCeCu 21
21λλ += (Equação 2.32)
17
Onde temos um movimento oscilatório, com a amplitude diminuindo de acordo com o
passar do tempo.
Figura 2.8 – Gráfico de movimento Subamortecido
Tem-se que o deslocamento u que é uma função de t, é uma grandeza física real,
então todas as operações efetuadas pela equação 2.32 devem resultar num número real.
Porem fica difícil imaginar como a equação formada por números complexos resulta no final
em uma grandeza real. A explicação a este fato pode ser provada aplicando a Fórmula de
Euler da Teoria dos números complexos, onde:
θθθisene
i ±=± cos (Equação 2.33), sendo i a unidade imaginaria igual a 1− .
m
k
m
c
m
c−
±
−=
2
2λ , substituem-se os termos desta formula pelo fator de
amortecimento ζ e alterando de um modo que a torne mais fácil para os cálculos:

18
nn ww ).1)(1( 2 −−±−= ζζλ nn wiw ).1( 2ζζλ −±−= (Equação 2.34)
Chama-se nd ww .)1( 2ζ−= , assim a solução geral homogênea é:
tiwwtiww
ghdndn eCeCu
)(2
)(1
−−+− += ζζ (Equação 2.35)
)( 21ddn iwtiwtw
gh eCeCeu−− += ζ
(Equação 2.36)
Aplica-se a Fórmula de Euler, na equação 2.36:
[ ]tsenwCCitwCCeu dd
tw
ghn )(cos)( 2121 −++= −ζ
(Equação 2.37)
Prova-se que neste caso C1 e C2 são números complexos conjugados, o que implica
que sua soma e suma subtração multiplicada ao termo imaginário i resultará num termo
Real, que para a equação será nada mais que uma constante. Assim, substituiremos
21 CC + por 1A , e )( 21 CCi − por 2A , o que resultará:
[ ]tsenwAtwAeu dd
tw
ghn
21 cos += −ζ (Equação 2.38)
Como já foi provado anteriormente, esta equação pode ser simplificada originando-
se:
[ ])( ψζ += −twAseneu d
tw
ghn
(Equação 2.39)
Assim, de uma equação que continha termos pertencentes ao conjunto dos
Complexos, obteve-se uma equação com resultado pertencente aos Reais.
19
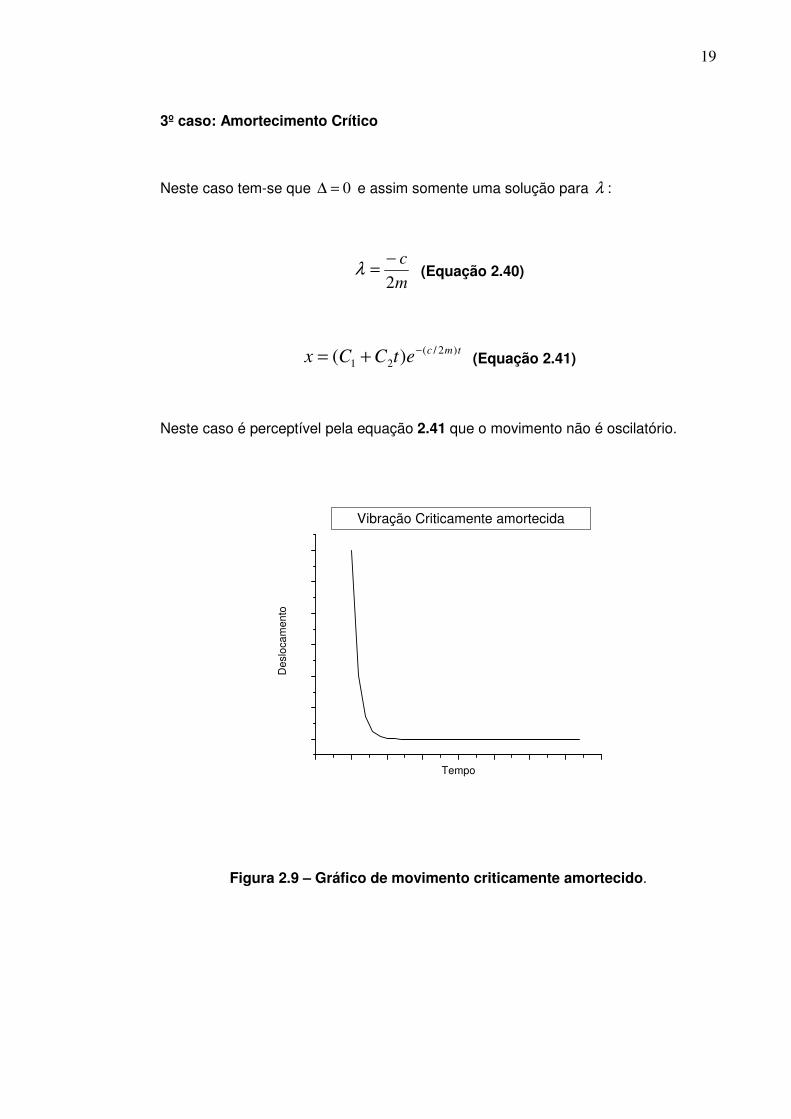
3º caso: Amortecimento Crítico
Neste caso tem-se que 0=∆ e assim somente uma solução para λ :
m
c
2
−=λ (Equação 2.40)
tmcetCCx )2/(21 )( −+= (Equação 2.41)
Neste caso é perceptível pela equação 2.41 que o movimento não é oscilatório.
Des
loca
men
to
Tempo
Vibração Criticamente amortecida
Figura 2.9 – Gráfico de movimento criticamente amortecido.
20
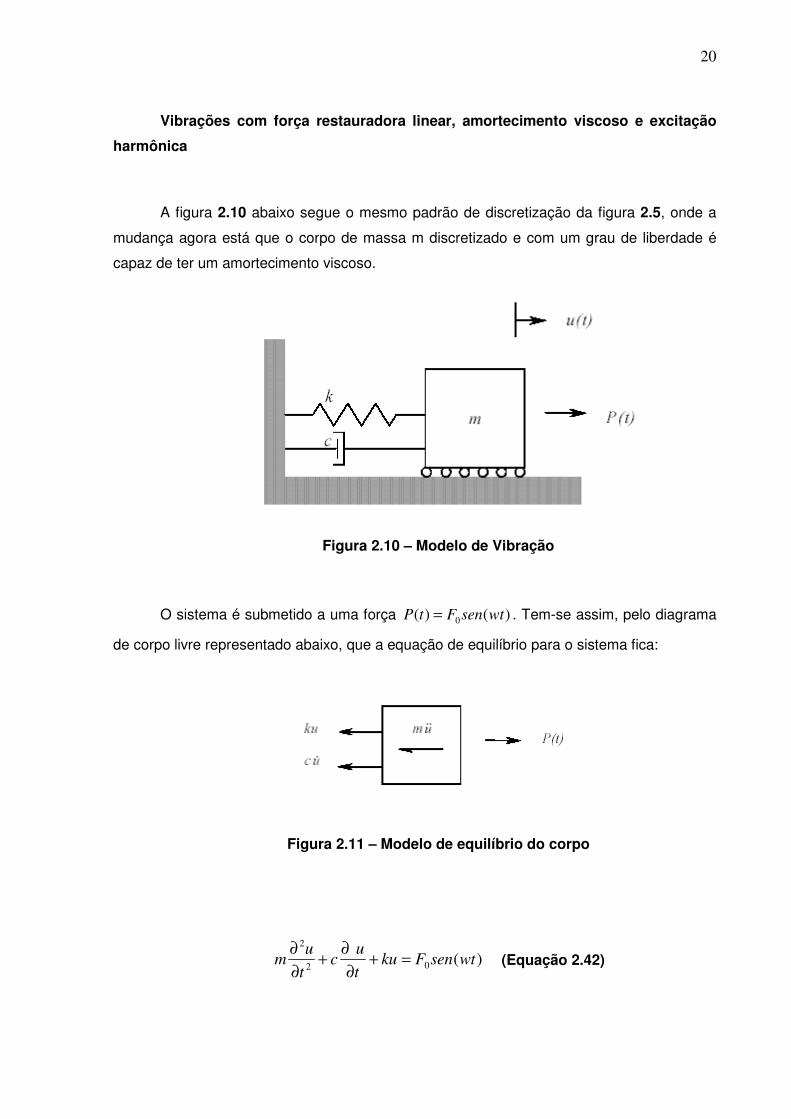
Vibrações com força restauradora linear, amortecimento viscoso e excitação
harmônica
A figura 2.10 abaixo segue o mesmo padrão de discretização da figura 2.5, onde a
mudança agora está que o corpo de massa m discretizado e com um grau de liberdade é
capaz de ter um amortecimento viscoso.
Figura 2.10 – Modelo de Vibração
O sistema é submetido a uma força )()( 0 wtsenFtP = . Tem-se assim, pelo diagrama
de corpo livre representado abaixo, que a equação de equilíbrio para o sistema fica:
Figura 2.11 – Modelo de equilíbrio do corpo
)(02
2
wtsenFkut
uc
t
um =+
∂
∂+
∂
∂ (Equação 2.42)

21
A solução desta equação diferencial é dada pela soma de uma equação geral mais
uma equação particular, faz-se aqui o estudo da equação particular, supondo:
wtBsenwtBu part cos21 += (Equação 2.43)
Onde a substituição da eq. 2.43 na equação 2.42 tem-se um sistema de duas
equações e duas incógnitas ( 1B , 2B ), que resolvido dará:
[ ] 01 )²(²)²(
²)(F
cwmwk
mwkB
+−
−= (Equação 2.44)
[ ] 02 )²(²)²(F
cwmwk
cwB
+−
−= (Equação 2.45)
Assim já se tem o resultado da solução particular, porém como foi feito
anteriormente, podemos simplificar esta expressão, vendo que elas são equivalentes:
wtBsenwtBu part cos21 += )( φ+= wtUsenu part (Equação 2.46)
O valor de U e φ , lembrando que crc
c=ζ é o fator de amortecimento e que
nw
wr = é
a relação entre a freqüência aplicada pela força com a freqüência natural da estrutura,
serão:
²² 21 BBU += )²(²)( 2
0
cwmwk
FU
+−= (Equação 2.47)
)².2(²)1(
12
0
rrk
FU
ζ+−= (Equação 2.48)
22
²1
2
)²/(1
)/)(/(2)(
r
r
ww
wwcctg
n
ncr
−=
−=
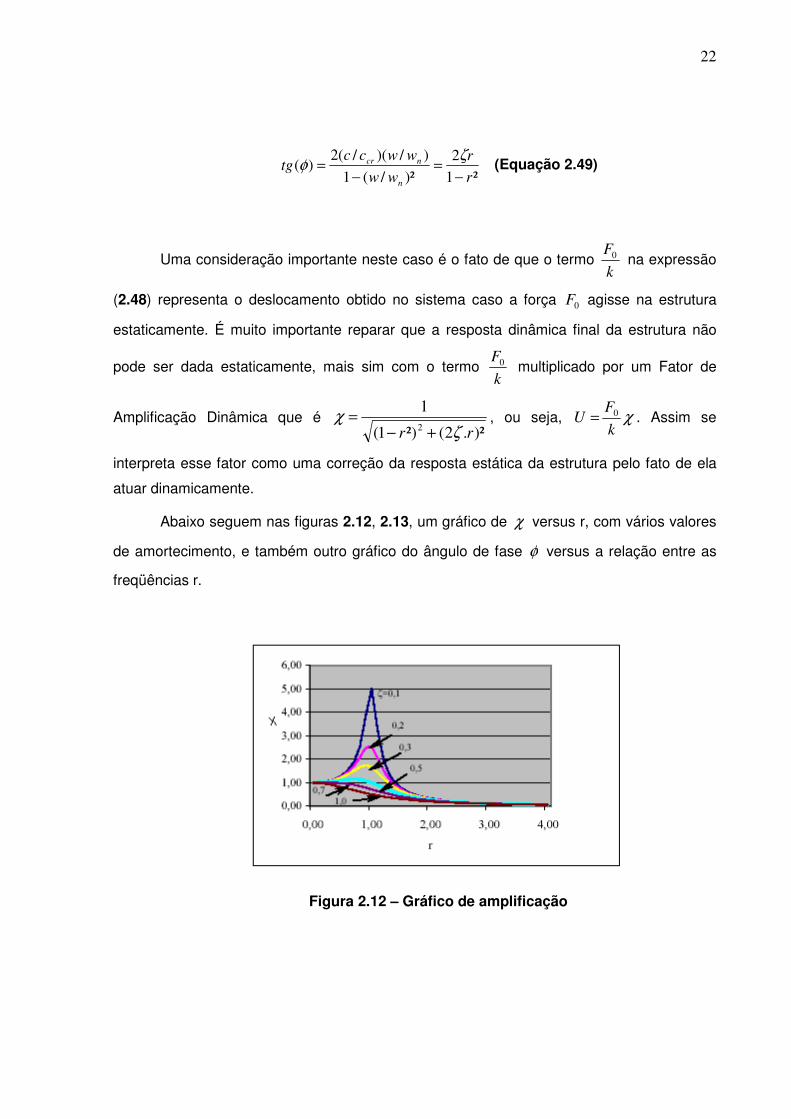
ζφ (Equação 2.49)
Uma consideração importante neste caso é o fato de que o termo k
F0 na expressão
(2.48) representa o deslocamento obtido no sistema caso a força 0F agisse na estrutura
estaticamente. É muito importante reparar que a resposta dinâmica final da estrutura não
pode ser dada estaticamente, mais sim com o termo k
F0 multiplicado por um Fator de
Amplificação Dinâmica que é )².2(²)1(
12
rr ζχ
+−= , ou seja, χ
k
FU 0= . Assim se
interpreta esse fator como uma correção da resposta estática da estrutura pelo fato de ela
atuar dinamicamente.
Abaixo seguem nas figuras 2.12, 2.13, um gráfico de χ versus r, com vários valores
de amortecimento, e também outro gráfico do ângulo de fase φ versus a relação entre as
freqüências r.
Figura 2.12 – Gráfico de amplificação
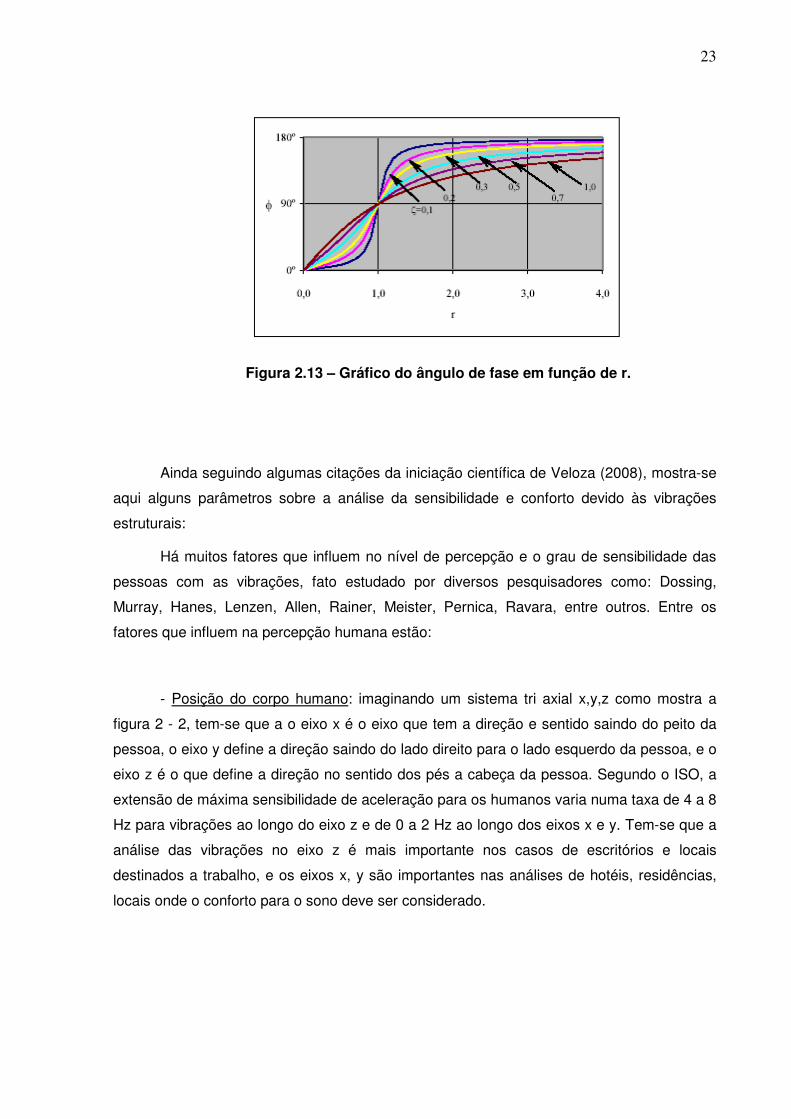
23
Figura 2.13 – Gráfico do ângulo de fase em função de r.
Ainda seguindo algumas citações da iniciação científica de Veloza (2008), mostra-se
aqui alguns parâmetros sobre a análise da sensibilidade e conforto devido às vibrações
estruturais:
Há muitos fatores que influem no nível de percepção e o grau de sensibilidade das
pessoas com as vibrações, fato estudado por diversos pesquisadores como: Dossing,
Murray, Hanes, Lenzen, Allen, Rainer, Meister, Pernica, Ravara, entre outros. Entre os
fatores que influem na percepção humana estão:
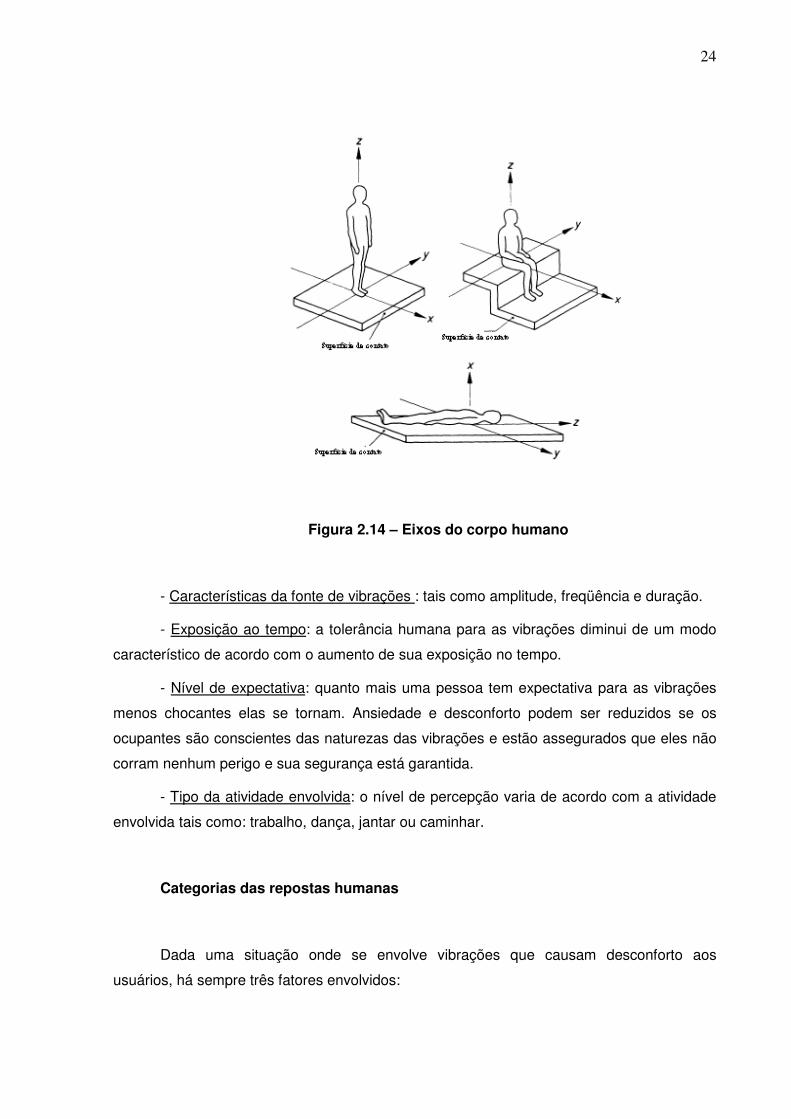
- Posição do corpo humano: imaginando um sistema tri axial x,y,z como mostra a
figura 2 - 2, tem-se que a o eixo x é o eixo que tem a direção e sentido saindo do peito da
pessoa, o eixo y define a direção saindo do lado direito para o lado esquerdo da pessoa, e o
eixo z é o que define a direção no sentido dos pés a cabeça da pessoa. Segundo o ISO, a
extensão de máxima sensibilidade de aceleração para os humanos varia numa taxa de 4 a 8
Hz para vibrações ao longo do eixo z e de 0 a 2 Hz ao longo dos eixos x e y. Tem-se que a
análise das vibrações no eixo z é mais importante nos casos de escritórios e locais
destinados a trabalho, e os eixos x, y são importantes nas análises de hotéis, residências,
locais onde o conforto para o sono deve ser considerado.
24
Figura 2.14 – Eixos do corpo humano
- Características da fonte de vibrações : tais como amplitude, freqüência e duração.
- Exposição ao tempo: a tolerância humana para as vibrações diminui de um modo
característico de acordo com o aumento de sua exposição no tempo.
- Nível de expectativa: quanto mais uma pessoa tem expectativa para as vibrações
menos chocantes elas se tornam. Ansiedade e desconforto podem ser reduzidos se os
ocupantes são conscientes das naturezas das vibrações e estão assegurados que eles não
corram nenhum perigo e sua segurança está garantida.
- Tipo da atividade envolvida: o nível de percepção varia de acordo com a atividade
envolvida tais como: trabalho, dança, jantar ou caminhar.
Categorias das repostas humanas
Dada uma situação onde se envolve vibrações que causam desconforto aos
usuários, há sempre três fatores envolvidos:
25
- Fonte: é onde as forças dinâmicas são geradas;
- Caminho: como a energia é transmitida;
- Receptor: qual o tanto que as vibrações podem ser toleradas.
Segundo (Dossing 1988).
Segundo a classificação do ISO 2631-1, as respostas humanas sobre os efeitos das
vibrações podem ser classificadas em três categorias:
- Quando o limite do conforto é extrapolado (“limite da redução do conforto”);
- Quando o limite é extrapolado e influi na eficiência do trabalho (“limite onde há um
decréscimo na taxa de trabalho”);
- Quando o limite entre a saúde e a segurança é extrapolado (“exposição limite”).
Estas categorias são derivadas de vários estudos conduzidos por indústrias de
transportes e geralmente refletem um nível mais alto de tolerância do que seria aceitável
para o setor de construções. De acordo com a ISO 2631-2:
“Experiências tem demonstrado que as queixas a respeito de construções em
situações residenciais são comumente notadas nos casos em que as magnitudes das
vibrações são de níveis perceptíveis. Em geral, as magnitudes satisfatórias são relatadas
com um mínimo nível de comentários adversos pelos ocupantes e não são determinadas
por nenhuns outros fatores tais como o reduzido termo de saúde e a eficiência do trabalho.
De fato, em praticamente todos casos as magnitudes são tais que não é possível a fadiga
ou outros sintomas induzidos por vibrações. ”
A categorização segundo Murray (1979) das respostas humanas é tem um projeto
mias orientado e mais utilizável. Ele define quatro principais categorias de respostas, entre
as quais as duas primeiras são aceitáveis no que o projeto diz respeito:
- Vibrações, ainda que presente, não é perceptível pelos ocupantes;
- Vibrações perceptíveis mais não irritam os usuários;
26
- Vibrações irritam e atrapalham os usuários;
- Vibrações são tão severas que fazem com que os ocupantes fiquem doentes.
Tolaymat (1988) desenvolveu um novo procedimento para a avaliação de vibrações
em pisos. Baseando - se na menor freqüência natural do sistema e no amortecimento
conhecido, o autor classificou os sistemas de pisos em três diferentes categorias:
- Sistemas que dissipam energia de vibração rapidamente. As pessoas não
percebem a vibração;
- Sistemas que não dissipam a energia de vibração rapidamente. As pessoas
percebem a vibração, mas a aceitam;
- Sistemas que não dissipam a energia de vibração rapidamente. As pessoas
percebem a vibração indesejável.
Limites de Conforto Humano a Vibrações de Pisos
Devido a aplicações de cargas dinâmicas em estruturas geram-se vibrações. As
vibrações dependem principalmente da relação entre a freqüência de excitação dominante
com a freqüência natural da estrutura. Quando essas freqüências têm valores próximos a
amplitude da vibração aumenta, sendo esta regulada apenas pela quantidade de
amortecimento presente no sistema.
O aumento da amplitude do movimento pode causar desconforto ao usuário ao
utilizar a estrutura, quanto problemas estruturais a mesma.
Pessoas em escritórios ou residências percebem vibrações em torno de 0,5% da
aceleração da gravidade (g), enquanto pessoas que estão praticando atividades físicas
aceitam vibrações de até 5%g ou mais segundo (Sommer, 2002).
A faixa de vibração entre 2 a 10 Hz, com grandes amplitudes de oscilação pode
provocar deformações significativas no corpo humano, como a ressonância de órgãos
específicos, aumentando a sensação de desconforto, provocando até lesões, e muitas
vezes prejudicando a habilidade de desenvolver atividades mecânicas.
27
Diferentes tipos de critérios para a avaliação de pisos
Faz-se aqui uma abordagem geral sobre os principais critérios nacionais e
internacionais sobre a limitação das vibrações quanto ao conforto e segurança para a
estrutura.
Há atualmente diversas normas especificas sobre analise dinâmica, como a escala
da CSA (Canadian Standard Association), a norma DIN 4150 Parte 2 (German Institute for
Standadization), ISO (International Organization for Standardization), NBC (Natinal Building
Code of Canada), BSI (British Standards Institution), etc.
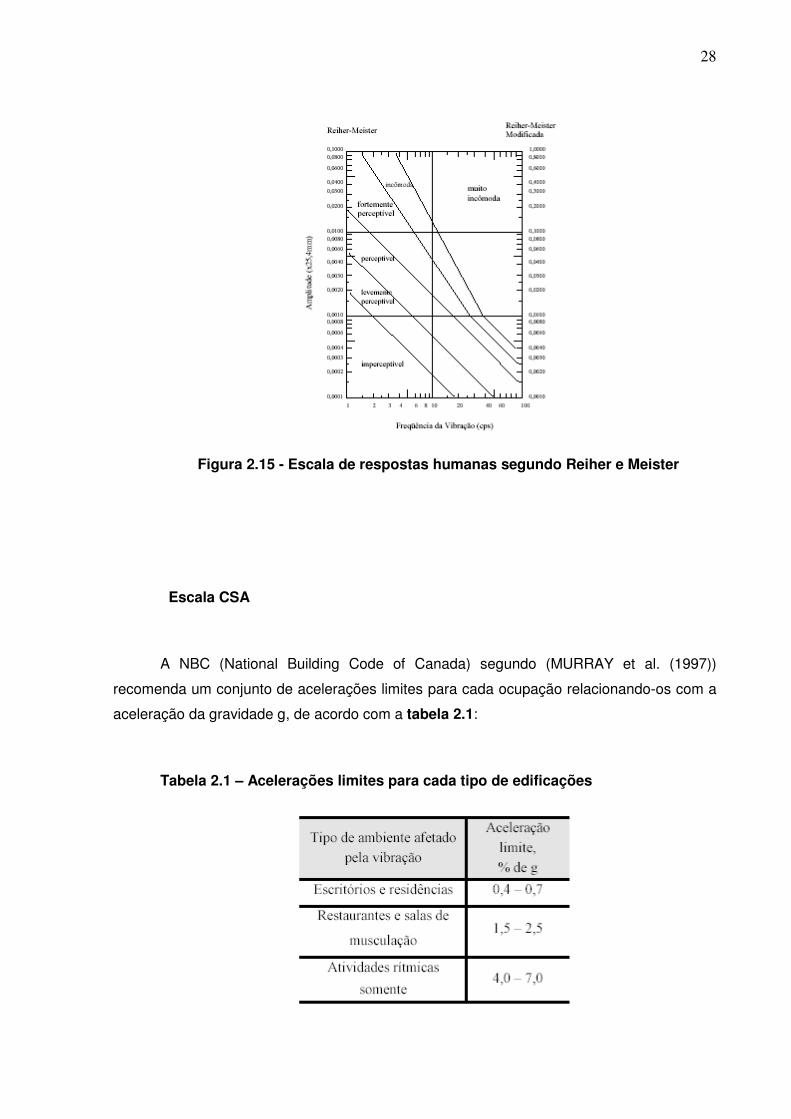
Escala Reither – Meister e Reither – Meister modificada
Escalas contendo critérios de aceitabilidade humana para vibrações em pisos
existem para ambos os casos de vibrações transientes e permanentes. Na década de 30,
Reiher e Meister desenvolveram uma escala de resposta humana para o caso de vibrações
permanentes baseado nas freqüências e amplitudes de vibração de Murray (1979), onde
sujeitou-se um grupo de pessoas em pé a vibrações permanentes, com uma variação de
freqüência de 5 a 100 Hz e na amplitude de 0,01 a 10 mm, as reações das pessoas em
média foi anotada numa faixa de poucamente perceptível até intolerável. Lenzen (1966)
sugeriu que a escala de Reither-Meister é aplicada a somente pisos com amortecimento
crítico menor que 5% se a amplitude da escala for aumenta por um fator 10. Segue a escala
na figura 2.15 abaixo:
28
Figura 2.15 - Escala de respostas humanas segundo Reiher e Meister
Escala CSA
A NBC (National Building Code of Canada) segundo (MURRAY et al. (1997))
recomenda um conjunto de acelerações limites para cada ocupação relacionando-os com a
aceleração da gravidade g, de acordo com a tabela 2.1:
Tabela 2.1 – Acelerações limites para cada tipo de edificações
29
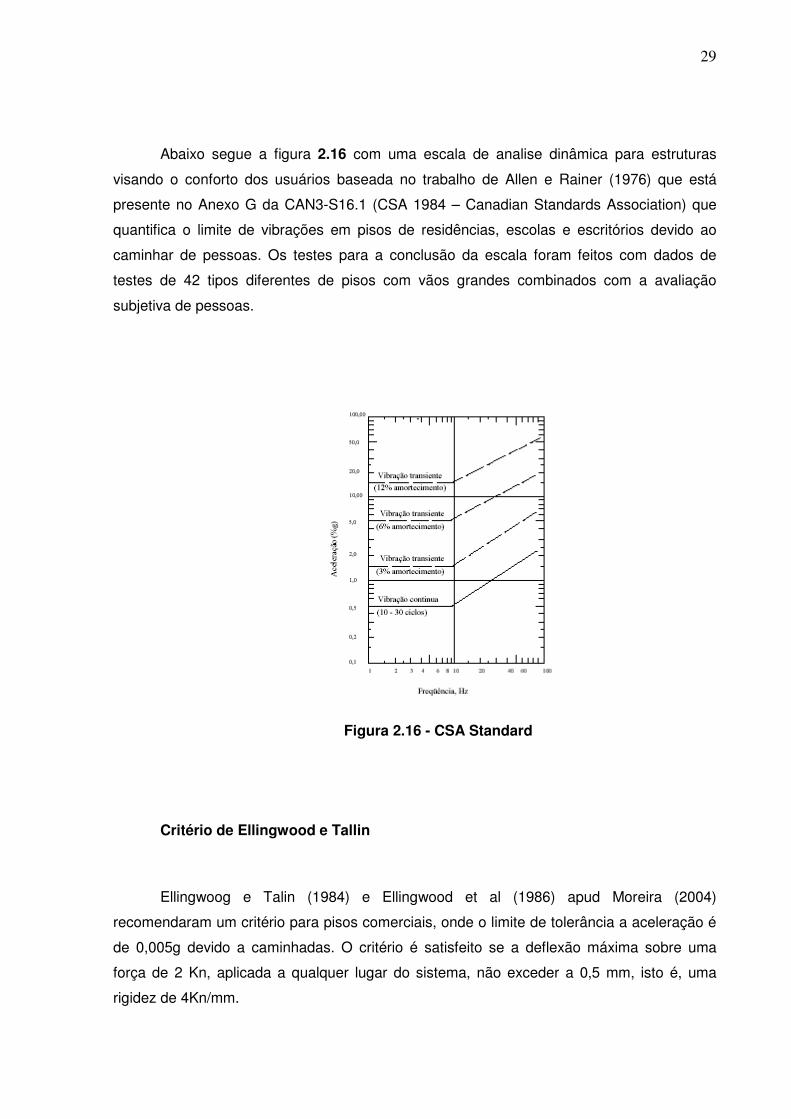
Abaixo segue a figura 2.16 com uma escala de analise dinâmica para estruturas
visando o conforto dos usuários baseada no trabalho de Allen e Rainer (1976) que está
presente no Anexo G da CAN3-S16.1 (CSA 1984 – Canadian Standards Association) que
quantifica o limite de vibrações em pisos de residências, escolas e escritórios devido ao
caminhar de pessoas. Os testes para a conclusão da escala foram feitos com dados de
testes de 42 tipos diferentes de pisos com vãos grandes combinados com a avaliação
subjetiva de pessoas.
Figura 2.16 - CSA Standard
Critério de Ellingwood e Tallin
Ellingwoog e Talin (1984) e Ellingwood et al (1986) apud Moreira (2004)
recomendaram um critério para pisos comerciais, onde o limite de tolerância a aceleração é
de 0,005g devido a caminhadas. O critério é satisfeito se a deflexão máxima sobre uma
força de 2 Kn, aplicada a qualquer lugar do sistema, não exceder a 0,5 mm, isto é, uma
rigidez de 4Kn/mm.
30
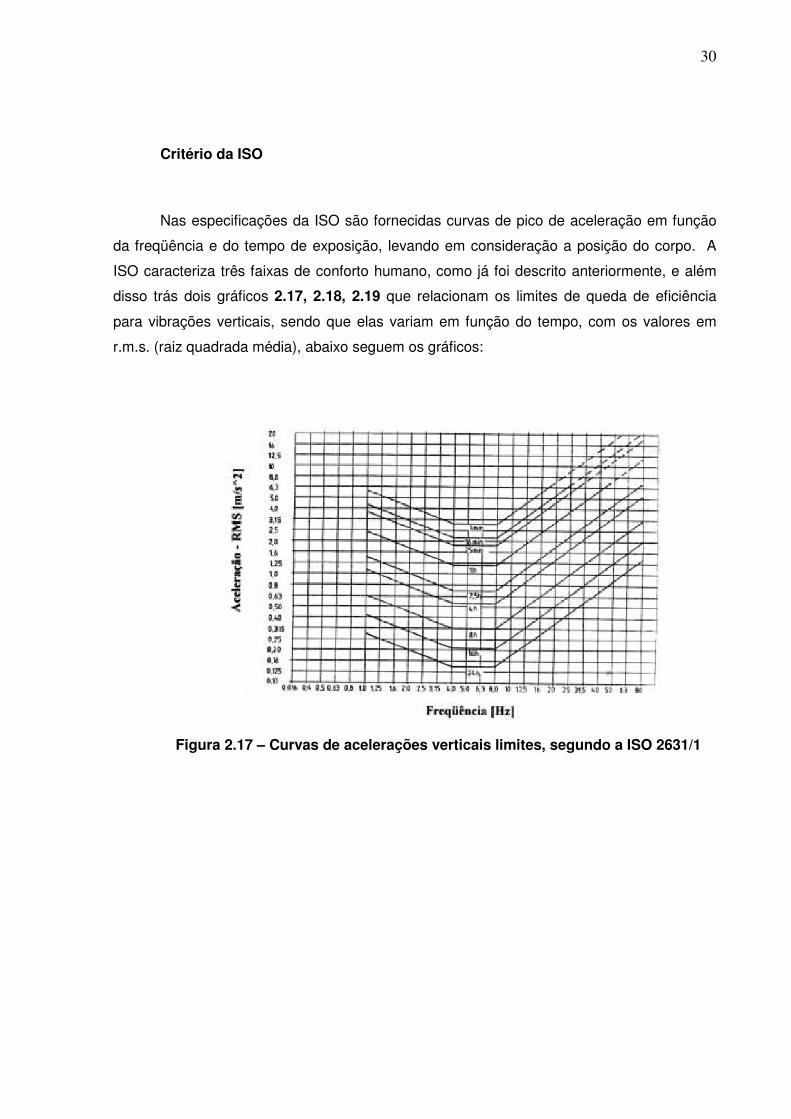
Critério da ISO
Nas especificações da ISO são fornecidas curvas de pico de aceleração em função
da freqüência e do tempo de exposição, levando em consideração a posição do corpo. A
ISO caracteriza três faixas de conforto humano, como já foi descrito anteriormente, e além
disso trás dois gráficos 2.17, 2.18, 2.19 que relacionam os limites de queda de eficiência
para vibrações verticais, sendo que elas variam em função do tempo, com os valores em
r.m.s. (raiz quadrada média), abaixo seguem os gráficos:
Figura 2.17 – Curvas de acelerações verticais limites, segundo a ISO 2631/1
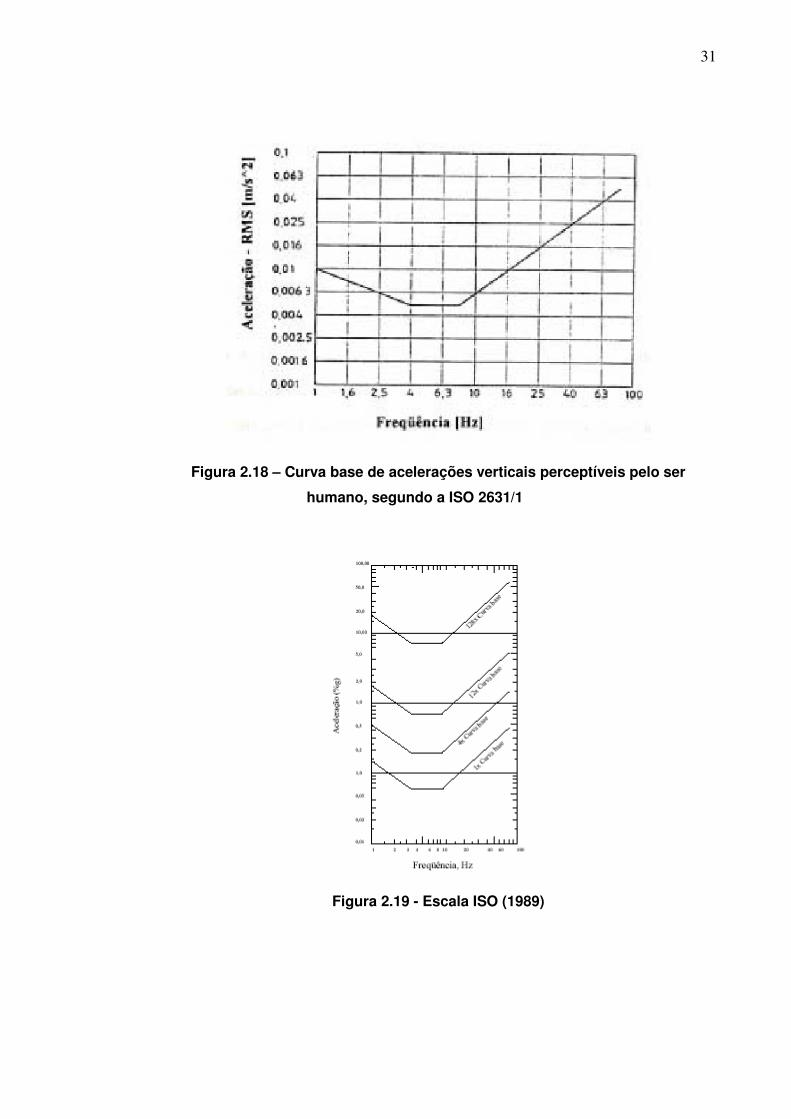
31
Figura 2.18 – Curva base de acelerações verticais perceptíveis pelo ser
humano, segundo a ISO 2631/1
Figura 2.19 - Escala ISO (1989)
32
Critério de Murray
Murray (1991) investigou mais de 100 construções problemáticas e na maioria dos
casos, a primeira freqüência natural dos pisos era entre 5 e 8 Hz.
Murray (1979) reviu quatro critérios sistemas de vibrações estruturais e concluiu que
eles eram inconsistentes e subestimavam a forte influência do amortecimento da estrutura
na aceitabilidade. Um novo critério para vigas de aço ou ainda mistas de aço concreto foi
proposto baseado em atividades normais de humanos em escritórios e meios residenciais
após 90 testes in-situ. O critério propõe que os pisos, devido às ações das atividades
humanas não serão objecionadas pelos ocupantes se a seguinte equação for satisfeita:
5.235 0 +> fAD (Equação 2.50)
Onde:
D = Amortecimento em percentagem crítica;
0A = Amplitude inicial máxima (in) no piso devido à excitações de quedas;
f = freqüência natural do piso.
Critério de Allen
Allen (1990) diz que baseado no tipo de atividade que estão sendo realizadas, os
humanos tem certo limiar de tolerância às vibrações. Pessoas em locais de trabalho ou
residências irão tolerar muito baixos níveis de vibrações do que os que estão participando
numa atividade .
Allen, Rainer e Pernica (1985), desenvolveram uma fórmula para uma mínima
freqüência natural que tenha como atividade a dança, onde essa atividade produz
aproximadamente um carregamento sinuoso dinâmico. A formula segue abaixo:
33
t
p
wg
a
wff
+≤
0
0
3,11
α
(Equação 2.50)
Onde:
0f = freqüência da força (Hz);
α = coeficiente do carregamento dinâmico;
0a /g = aceleração limite;
pw= carregamento equivalente uniformemente distribuído para os participantes;
tw = peso total do piso (incluindo os participantes).
Exercícios de pular, tais como os impactos causados em movimentos de aeróbica
onde ambos os pés deixam o pavimento, produzem “componentes de carregamentos
senoidais que não apenas envolvem a batida da musica, mas também harmônicos das
batidas das músicas” (Allen 1990). Allen (1990) desenvolveu uma norma de procedimento
especificamente para pavimentos feitos para suportar atividades e exercícios de dança.
Uma aceleração limite de 2% g, foi proposta para instalações combinando aeróbica e
levantamento de peso no mesmo pavimento, enquanto um limite de 7% g foi sugerido para
instalações de apenas atividades aeróbicas.
Allen (1990) propôs uma formula de mínima freqüência natural recomendada para
pavimentos com atividades aeróbicas baseada na equação 2.50 acima, no qual sugere:
t
pi
wg
a
wiff
+≤
0
0
21
α
(Equação 2.51)
34
Onde i = número da harmônica freqüência aplicada, os outros termos são
iguais aos descritos na eq. 2.51 acima.
A eq. 2.51 leva em conta os três primeiros harmônicos do carregamento.
Freqüências devido ao carregamento senoidais alem do terceiro harmônico tipicamente são
relativamente de magnitudes pequenas se comparadas aos três primeiros harmônicos e
podem ser desconsiderados para finalidades práticas.
Músicas para exercícios de aeróbica, geralmente ocorrem numa faixa de 150 batidas
por minuto, ou 2,5 Hz, a um máximo de 2,75 Hz. O segundo e terceiro harmônicos de
freqüências forçadas de 2,5 Hz, são correspondentes a 5 Hz e 7,5 Hz, a qual podem
corresponder com a freqüência natural da estrutura, resultando numa situação de
ressonância. Em geral, a equação 2.52 resulta numa freqüência natural exigida maior que 9
– 10 Hz.
Critério de Bachmann
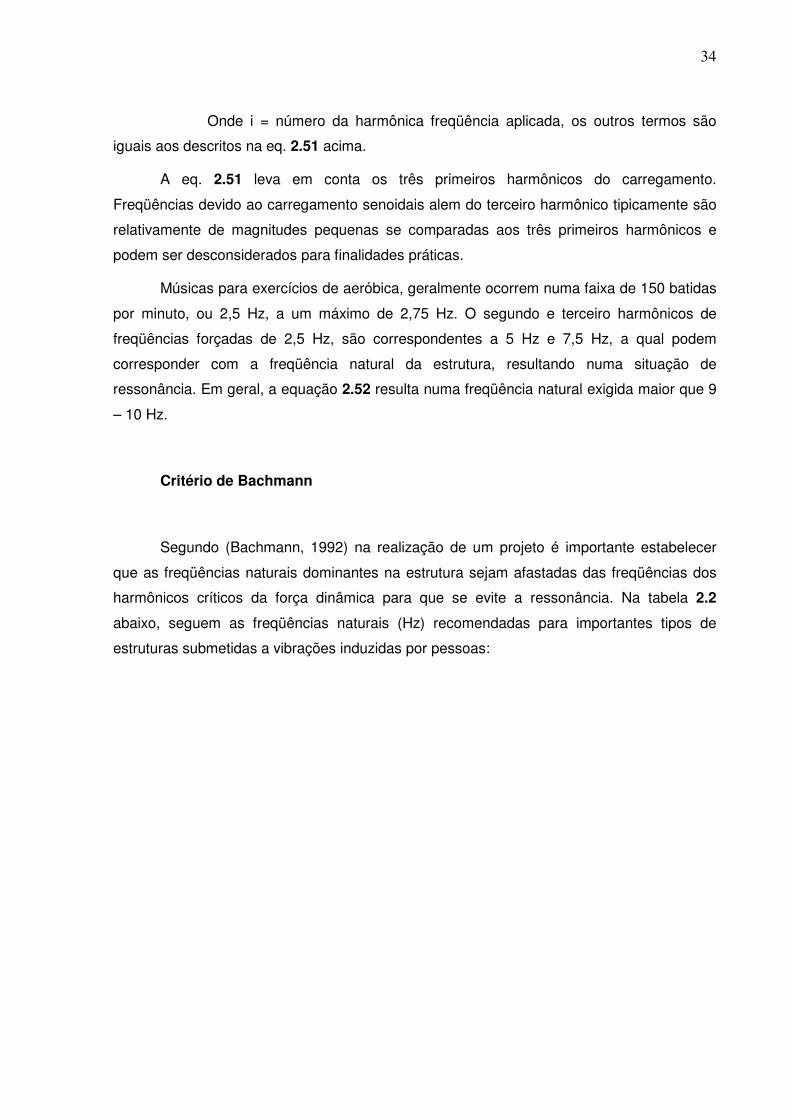
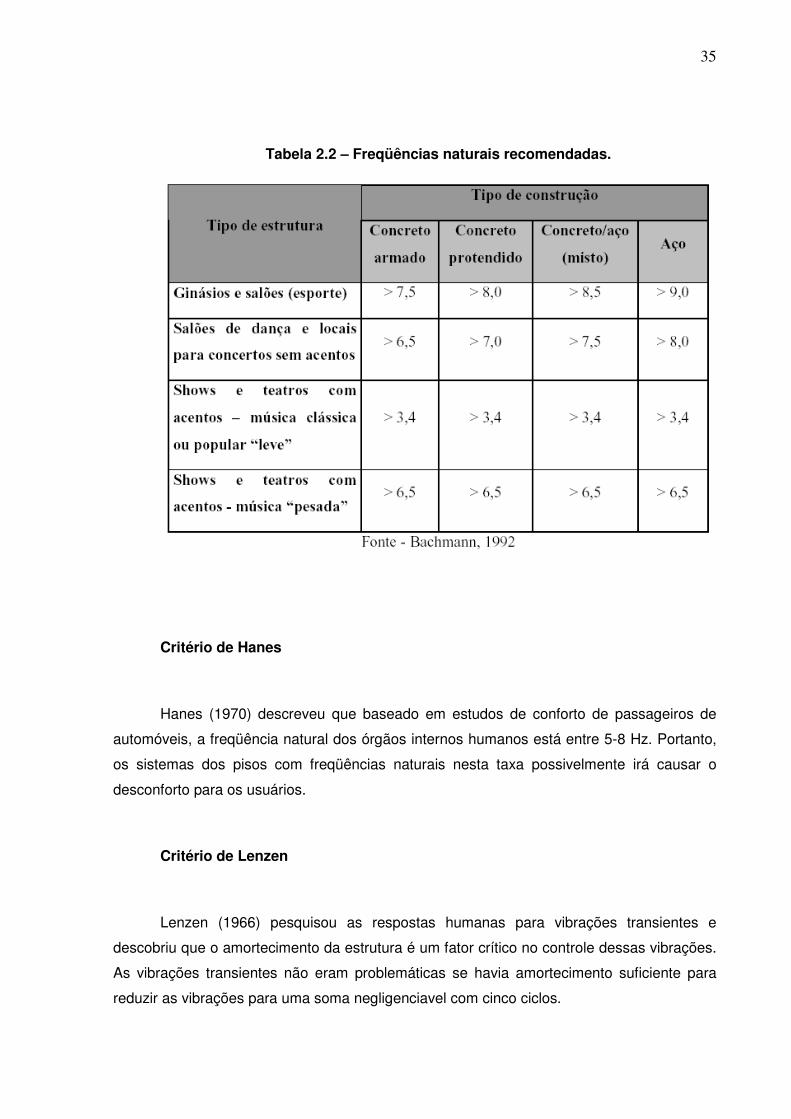
Segundo (Bachmann, 1992) na realização de um projeto é importante estabelecer
que as freqüências naturais dominantes na estrutura sejam afastadas das freqüências dos
harmônicos críticos da força dinâmica para que se evite a ressonância. Na tabela 2.2
abaixo, seguem as freqüências naturais (Hz) recomendadas para importantes tipos de
estruturas submetidas a vibrações induzidas por pessoas:
35
Tabela 2.2 – Freqüências naturais recomendadas.
Critério de Hanes
Hanes (1970) descreveu que baseado em estudos de conforto de passageiros de
automóveis, a freqüência natural dos órgãos internos humanos está entre 5-8 Hz. Portanto,
os sistemas dos pisos com freqüências naturais nesta taxa possivelmente irá causar o
desconforto para os usuários.
Critério de Lenzen
Lenzen (1966) pesquisou as respostas humanas para vibrações transientes e
descobriu que o amortecimento da estrutura é um fator crítico no controle dessas vibrações.
As vibrações transientes não eram problemáticas se havia amortecimento suficiente para
reduzir as vibrações para uma soma negligenciavel com cinco ciclos.
36
Critério da Norma Inglesa
A mais relevante especificação Inglesa é a BS 6472: Avaliação da exposição
humana à edifícios (1 a 80 Hz) (British Standards Institute, 1984), a qual é fortemente ligada
a norma internacional ISO 2631: Guia de Avaliação a exposição humana à vibração total do
corpo, que é em parte descendente das especificações Alemãs feitas para condições
industriais de trabalho. Entretanto ela incorporou revisão substancial num contexto mais
amplo, incluindo o trabalho de Irwin (1978). A BS 6472 define uma curva base de aceleração
em função da freqüência, com multiplicadores para definir os níveis aceitáveis em relação a
função do edifício e a natureza da excitação. A curva base é idêntica em forma as linhas da
figura (CSA Standard), com os valores numéricos um décimo em relações as curvas
canadenses para oscilações. Entretanto, a medida utilizada na BS 6472 é o valor quadrático
médio (r.m.s.) da aceleração, e não o pico médio. Para respostas dominadas por
componentes simples de excitação harmônica, o valor do r.m.s. vale 2/1 vezes o pico.
Moreira (2004).
Critério Europeu
Os critérios europeus aceitáveis são normalmente mais rigorosos que os critérios
norte americanos, devido normalmente ao uso tradicional de pisos de concreto com
pequenos vãos. A princípio Bachmann e Ammann (1987) recomendaram que o sistema de
piso composto de laje de concreto e vigas metálicas tenham uma freqüência natural menor
que 9 Hz. A maioria dos pisos citados acima em edifícios comerciais da América do Norte
estão com uma freqüência entre 5 – 9 Hz, mesmo assim são aceitáveis pelos ocupantes.
Moreira (2004). Isto prova que realmente a Norma Européia é mais rigorosa quanto aos
fenômenos das vibrações.
Critério da Norma Brasileira
- NBR 8800
No Brasil, para a avaliação de vibrações em pisos, tem-se como guia a NBR 8800 –
Anexo L (2008). A qual segue conceitos do ISO 2631/1 e 2.
37
A Norma indica que o uso de estruturas de pisos com vãos grandes e de
amortecimento reduzido pode resultar em vibrações que causem desconforto durante as
atividades humanas normais ou causar prejuízo ao funcionamento de equipamentos. Para
esse estado-limite de serviço, devem-se utilizar as combinações freqüentes de serviço,
dadas por:
∑ ∑= =
++=m
i
n
j
kQjjkQkGiser FFFF1 2
,2,11, )(ψψ (Equação 2.53)
Ela cita também que em nenhum momento a freqüência natural da estrutura deve ser
inferior a 3Hz.
Avaliação precisa
O problema de vibração em pisos deve ser levada em conta no projeto da estrutura
por meio de análise dinâmica, levando-se em conta pelo menos:
- As características e a natureza das excitações dinâmicas, como, por exemplo, as
decorrentes do caminhar de pessoas e atividades rítmicas;
- Os critérios de aceitação para conforto humano em função do uso e ocupação das
áreas do piso;
- A freqüência natural da estrutura do piso;
- A razão de amortecimento modal;
- Os pesos efetivos do piso.
Daí então a Norma cita uma lista de referencia bibliográfica para que se faça uma
avaliação precisa, ou seja, a Norma não define nenhum critério único para que seja feita
esta análise.
38
Avaliação Simplificada Humana para atividades Normais
Aqui a Norma indica que esta avaliação simplificada é somente para atividades
humanas normais, e que este tipo de avaliação fica a critério do projetista, e pode não ser a
solução correta.
- Nos pisos em que as pessoas caminham regularmente, como os de escritórios,
residências, a freqüência natural não deve ser inferior a 4 Hz. Essa condição fica satisfeita
se o deslocamento vertical total do piso causado pelas ações permanentes, excluindo a
parcela dependente do tempo, e pelas ações variáveis, calculado considerando-se as vigas
como bi apoiadas e usando as combinações freqüentes de serviço não superar 20 mm.
- Nos pisos em que pessoas dançam ou saltam de forma rítmica, como academias
de ginástica, salões de dança, ginásios e estádios de esportes, a menor freqüência natural
não pode ser inferior a 6 Hz, devendo ser aumentada em 8 Hz se a atividade for muito
repetitiva, como ginástica aeróbica. Essas condições ficam satisfeitas, respectivamente, se
o deslocamento vertical total do piso causado pelas ações permanentes, excluindo a parcela
dependente do tempo, e pelas ações variáveis, calculado considerando-se as vigas como bi
apoiadas e usando as combinações freqüentes de serviço não superar 9 mm e 5 mm.
Como se vê a Norma brasileira ainda está muito imprecisa sobre as questões de
vibrações, fato que deve ter posterior aprofundamento.
- NBR 6123
Segundo um critério da NBR 6123, a aceleração máxima no topo de um edifício não
deve ultrapassar a amplitude máxima de 0,1m/s² para que se atendam as exigências de
conforto aos usuários. Conhecidos a freqüência natural jf e o deslocamento máximo ju
no
topo da edificação sob a ação do vento determinada dinamicamente, a aceleração neste
nível pode ser obtida analiticamente por:
jjj ufa2²4π=
(Equação 2.54)
39
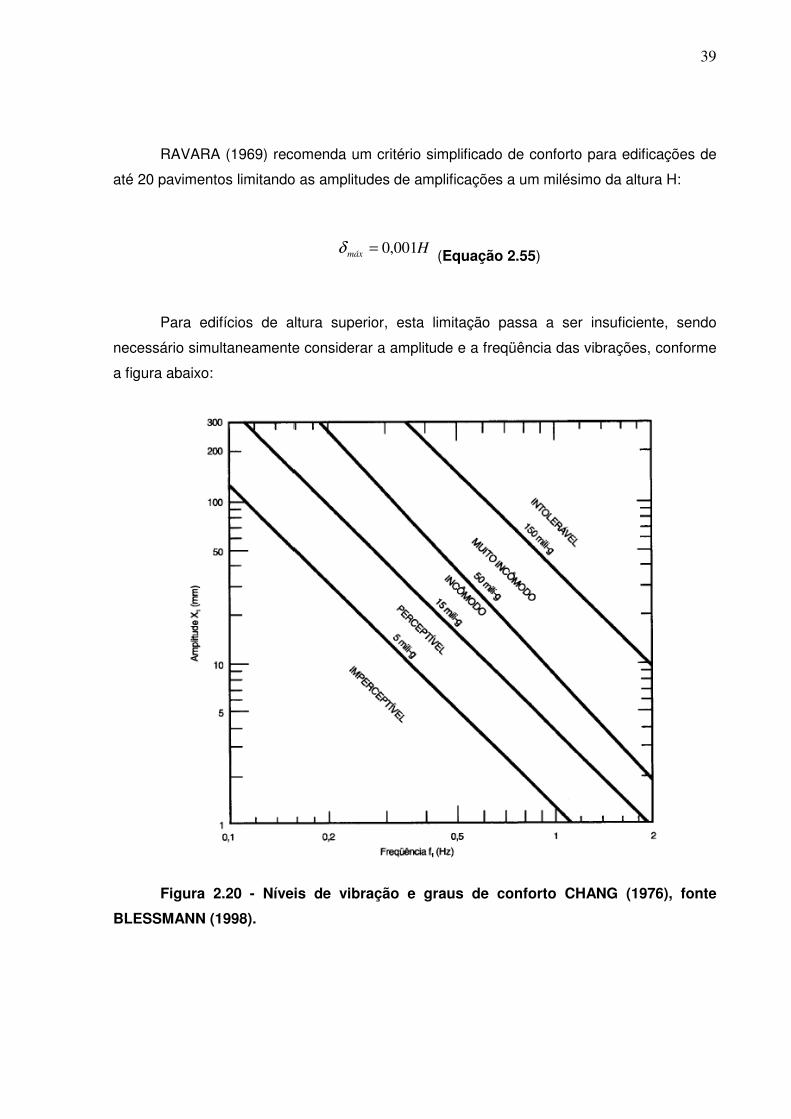
RAVARA (1969) recomenda um critério simplificado de conforto para edificações de
até 20 pavimentos limitando as amplitudes de amplificações a um milésimo da altura H:
Hmáx 001,0=δ (Equação 2.55)
Para edifícios de altura superior, esta limitação passa a ser insuficiente, sendo
necessário simultaneamente considerar a amplitude e a freqüência das vibrações, conforme
a figura abaixo:
Figura 2.20 - Níveis de vibração e graus de conforto CHANG (1976), fonte
BLESSMANN (1998).
40
Análise por outras revisões bibliográficas
Segundo Ribeiro (2007), o autor faz análises de torres metálicas de diversas alturas,
de seções transversais quadradas, em diversos casos de solicitações de ações dinâmicas e
estáticas, sendo algumas dessas ações dinâmicas realizadas pelo vento e outras realizadas
pela ruptura de algum dos cabos de sustentação da estrutura. As análises das ações
dinâmicas do vento são bastante interessantes, sendo que em um caso ele calcula essas
ações pelo método tradicional de cálculo e no outro pelo método estatístico de Monte Carlo,
com base em dados práticos sobre o vento.
Os principais objetivos do trabalho são provar que as ações dinâmicas nestas torres
metálicas são de extrema importância, vendo que já houve vários casos de queda destas
estruturas, e outro objetivo é poder comparar os resultados entre os resultados das ações
dinâmicas quando obtidas pelo programa SAP 2000, e pelo programa de Menin (2002).
As justificativas do projeto estão em estabelecer que cada vez mais essas torres
metálicas estão sendo utilizadas como elementos de radiodifusão, que é um mercado que
vem crescendo muito ultimamente, as estruturas estão sendo cada vez mais esbeltas, e os
projetistas não estão levando em conta as ações dinâmicas do vento para o
dimensionamento delas.
Assim, por base deste trabalho pretende-se explorar para a realização do TCC as
modelagens matemáticas utilizadas para o cálculo destas estruturas, a entrada de dados de
ações do vento no programa SAP 2000, a forma de discretização da estrutura e a análise
dos dados obtidos pelo uso do programa SAP 2000.
No livro de Filho (2005), há uma breve descrição de como se realizam as
modelagens matemáticas pelo método de Elementos Finitos para o cálculo destes efeitos
dinâmicos nas estruturas, além disso o livro possui bastante exemplos numéricos de fácil
compreensão e forte presença teórica. O livro dá também noções de estruturas
discretizadas com diversos graus de liberdade com o uso de autovalores e autovetores.
Para o TCC, este trabalho dará grandes exemplos e descrições sobre a metodologia
de cálculo usado nos softwares de análise dinâmica, vendo que a maioria dos programas
computacionais utilizados para o cálculo de ações dinâmicas utilizam este método de
elementos finitos, assim, pode-se ter uma melhor compreensão do funcionamento do
programa, além disso, ressalta-se o uso de um exemplo de cálculo manual de uma estrutura
realizado no trabalho de Iniciação Científica para a comparação entre resultados obtidos por
41
meio do cálculo manual e cálculo por meio do programa SAP 2000, sendo que este exemplo
da Iniciação Científica tomou como base os fundamentos deste livro.
Mostra-se abaixo algumas das deduções de fórmulas baseadas no livro de Filho
(2005) a parte que diz a respeito de auto valores e auto vetores será estudada nos capítulos
iniciais desta monografia, devido sua maior importância para o trabalho:
Conceito de Energia num Movimento Harmônico Simples
Tem-se num MHs uma certa quantidade de Energia Cinética e uma certa quantidade
de Energia Potencial Elástica, e a soma destas duas parcelas dá a Energia Mecânica do
sistema, que tem a propriedade de ser sempre constante independente da posição do corpo
ou do tempo.
2
2mv
Ec = 2
²
2
2KxKu
Eelástica == (Equação 2.56)
(Equação 2.57)
Existe pontos da trajetória onde a energia cinética é máxima e a energia potencial é
zero, e pontos onde ocorre o oposto. Assim podemos calcular um valor fixo para a energia
mecânica.
²²²22
)²(Afm
AwmEmecânica π== (Equação 2.58)
No trabalho de Nóbrega (2004), onde o autor discorre sobre diversos exemplos
práticos e teóricos realizados em estruturas pré-moldadas de concreto, sendo que estes
exemplos são realizados com o uso de ferramentas computacionais baseadas no uso de
elementos finitos, há também a comparação entre os diversos resultados obtidos.
cteKumv
Emecânica =+=22
22
42
Com esse trabalho, pretende-se explorar para o TCC a modelagem matemática das
estruturas utilizadas, a entrada e saída de dados nos programas computacionais, além de
toda conceituação teórica que existe no trabalho.
Nos trabalhos realizados por Alcantara (2005), utiliza-se exemplos teóricos e práticos
das ações dinâmicas nas estruturas, com posterior comparação entre resultados.
Para o TCC, pretende-se utilizar também as modelagens matemáticas das estruturas
utilizadas, a entrada e saída de dados nos programas computacionais.
No trabalho de Rakesh (2000) que aborda as conceituações sobre como realizar a
entrada de dados e como rodar uma estrutura no SAP 2000, pretende-se, se necessários,
alguns conceitos de como utilizar o programa SAP 2000 corretamente.
No trabalho de Alcantara (2005), onde também são abordados os aspectos de
modelagem computacional, exemplos numéricos e práticos de ações de vibrações,
pretende-se para o TCC, explorar como são realizados estes exemplos e suas comparações
de resultados.
Em Yum et. al. (2005), há uma breve descrição sobre vibrações em edifício de aço,
neste caso o autor dá uma certa ênfase na norma regulamentadora Australiana sobre os
critérios de aceitação das vibrações e além disso propõe um exemplo numerico de uma laje
sujeta à vibrações e cálcula a aceitação dessas vibrações segundo os pré-requisitos da
norma Australiana.
Para o presente trabalho, este exemplo sera de extrema importância, vendo que
também será realizado um exemplo de verificação de aceitação das vibrações para uma
estrutura.
Em Craig (2007), há também uma descrição dos critérios de aceitação de vibrações
nas estruturas, onde cita diversas pesquisas de autores de renome sobre o assunto. Este
trabalho também servirá para o TCC como base de dados para a verificação de uma
estrutura sobre os critérios de conforto das vibrações.
43
3. ANÁLISE DINÂMICA UTILIZANDO
O PROGRAMA SAP2000.
3.1 APRESENTAÇÃO E DESCRIÇÃO DO PROGRAMA
A sigla S.A.P. é a abreviação de Structural Analysis Program e pertence a família de
softwares para estruturas mais usada no mundo. O Autor do Software SAP é o Prof.
Edward L. Wilson da Universidade da California, Berkeley. Ressalta-se que o termo
Elementos Finitos foi criado pelo Prof. Ray Clough também da Universidade de Berkeley,
considerada como "o berço" dos Elementos Finitos.
Cronologia dos Programas SAP:
• SAP II - ano 1972 - tese de doutorado do Prof. Wilson
• SAP IV - ano 1974 - surge o software de Elementos Finitos mais usado no
mundo
• SAP80 - ano 1982 - primeiro software de Elementos Finitos para
microcomputador
• SAP90 - ano 1989 - introduz avançados recursos gráficos
• SAP2000 - ano 1997 - surge o mais moderno software de Elementos Finitos
• SAP2000 v.8 - ano 2003 - geração paramétrica e nova Análise Não-linear
• SAP2000 v.9 - ano 2004 - novos recursos para pontes e estruturas offshore
• SAP2000 v.10 - ano 2005 - recursos para Construção em Etapas e Interação
Solo-estrutura
44
• SAP2000 v.11 - ano 2006 - novos recursos para Análise Dinamica e Não-
linear
• SAP2000 v.12 - ano 2007
• SAP2000 v.14 - ano 2009
3.1.1 DESCRIÇÃO DO PROGRAMA
O software SAP2000 é o mais utilizado no mundo para Análise Estrutural, por meio
dele pode-se analisar e projetar uma estrutura desejada utilizando uma interface gráfica de
fácil aplicação.
O programa utiliza para seus cálculos o processo de subdivisão da estrutura por
elementos finitos, ou seja, ele discretiza a estrutura em pequenas regiões (pontos) onde se
efetuam os cálculos. A precisão dos resultados varia de acordo com o número de elementos
finitos que a estrutura é discretizada, ou seja, quanto maior o número de discretizações,
maior será o resultado, sendo que o programa possibilita essa manipulação.
3.1.2 DESCRIÇÃO DO MODELO ESTRUTURAL
O SAP2000 analisa e projeta sua estrutura usando um modelo que pode-se definir
por uma interface gráfica. A composição do modelo consiste primariamente na definição dos
seguintes componentes:
• Unidades
• Objetos e elementos
• Grupos de objeto e elementos
• Sistemas de coodenadas (x,y,z)
• Propriedades (seção, tipo de material)
• Casos de carregamentos (peso próprio, cargas)
• Funções
• Casos a serem analisados
45
• Combinações
• Definições de projeto
• Definições de saída de dados
Nos manuais do SAP2000 existe uma completa definição de todos esses parâmetros
e uma explicação bem detalhada de toda composição do programa, abaixo apenas entra-se
em detalhe sobre como é realizada a análise modal da estrutura no SAP2000, vendo que
este é o tema principal deste TCC.
3.1.3 ANÁLISE MODAL
A análise modal é utilizada para determinar os modos de vibração da estrutura. Estes
modos são bastante úteis para entender o comportamento da estrutura. Eles podem
também ser utilizados como base para uma superposição modal nos casos de análise pra
um response-spectrum e modal time-history.
Seguem abaixo dois tipos de casos que definem uma análise modal:
• Eigenvector
• Ritz-vector
A análise modal é sempre linear. Um caso de análise modal pode ser baseado na
rigidez de toda a estrutura sem sofrer nenhuma tensão, ou sobre a rigidez do fim da análise
de um caso não linear.
No caso de se utilizar a rigidez no fim de um caso não linear, pode-se estimar os
modos no caso P-Delta, análise da rigidez geométrica em diferentes etapas da construção,
ou seguir uma significante excursão por uma análise não linear de um terremoto.
3.1.3.1 Eigenvector
A análise por meio de Eigenvector determina os modos de vibrações livres e não
amortecidas e as freqüências do sistema. Estes modos naturais dão um excelente
46
conhecimento sobre o comportamento da estrutura, eles também podem ser utilizados como
base para os casos de response-spectrum e time-history analisis.
A análise por Eigenvector envolve a solução para o generalizado Eigen valor do
problema:
[ ] 0² =ΦΩ− MK Equação 3.1
Onde K é a matriz de rigidez, M é a matriz diagonal de massa e ²Ω é a matriz
diagonal de eigen valores e Φ é a matriz de correspondentes eingen vetores (formatos dos
modos).
Cada par de Eigen valor – Eigen vetor é chamado de modo de vibração natural da
estrutura. Os modos são identificados por números de 1 a n pela ordem em que eles são
calculados pelo programa.
O Eigen valor é o quadrado da freqüência natural, w.
Pode-se especificar pelo programa o numero de modos a serem encontrados, a
tolerância de convergência e as taxas de interesse de freqüências.
3.1.3.2 Análise por Ritz-Vector
Pesquisas têm indicado que os modos naturais de livre vibrações não são a melhor
base para a análise do modo de superposição de estruturas com carregamentos dinâmicos.
Isso tem sido demonstrado por vários pesquisadores.
A razão pela qual os Ritz vectors produzem excelentes resultados está por eles
levarem em consideração a distribuição espacial do carregamento dinâmico, ao passo que o
uso direto dos formatos de modos naturais negligenciam essa importante informação. Além
disso o algoritmo de Ritz vectors automaticamente inclui técnicas numéricas de
condensação.
47
3.2 ANÁLISE DINÂMICA ANALÍTICA DE ESTRUTURAS
Neste item apresentam-se exemplos numéricos de caráter prático para conseguir
exemplificar os diversos modos de vibrações existentes numa estrutura real e as diversas
maneiras de solicitações de cargas dinâmicas. Pretende-se explorar aqui os conceitos da
resolução de exercícios dinâmicos solucionados “manualmente”, com cálculos menos
elaborados e menos precisos.
A estrutura escolhida para ser estudada é uma caixa d’água devido à facilidade de
conhecimento das propriedades dos materiais, seções, solicitações que a compõe, e por ser
ela uma estrutura que apresenta normalmente uma solicitação dinâmica devido a ação de
cargas de vento e o carregamento da própria água.
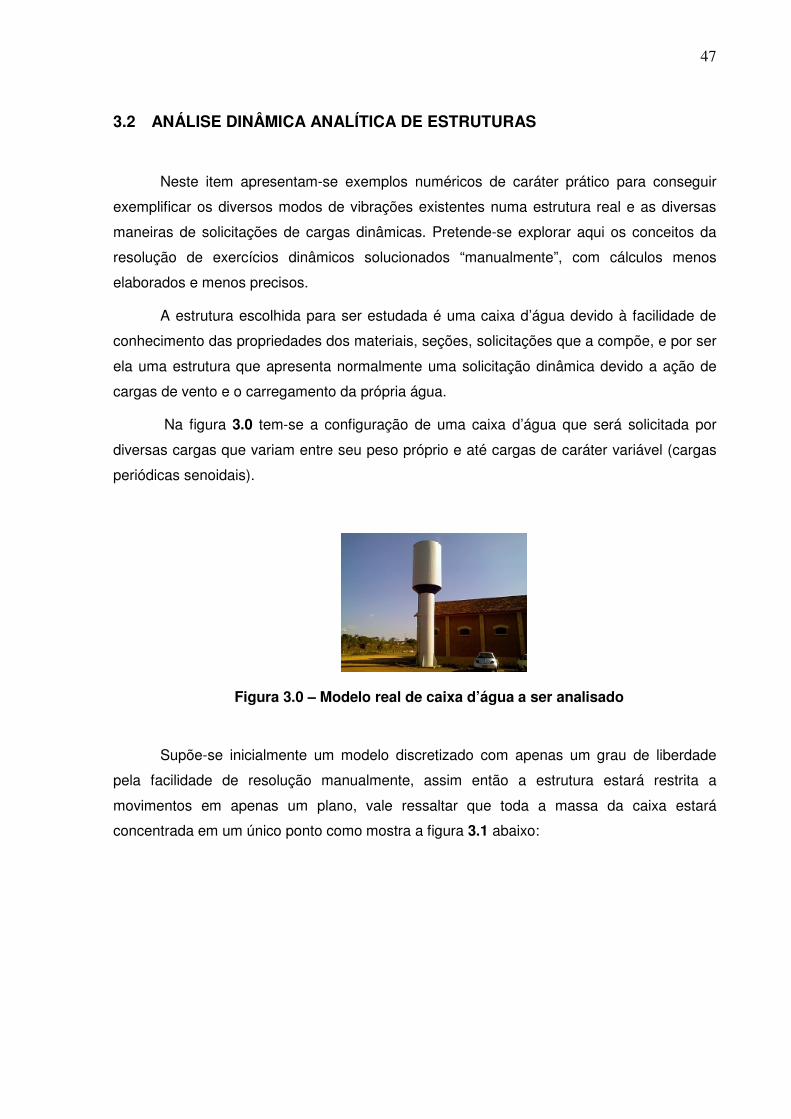
Na figura 3.0 tem-se a configuração de uma caixa d’água que será solicitada por
diversas cargas que variam entre seu peso próprio e até cargas de caráter variável (cargas
periódicas senoidais).
Figura 3.0 – Modelo real de caixa d’água a ser analisado
Supõe-se inicialmente um modelo discretizado com apenas um grau de liberdade
pela facilidade de resolução manualmente, assim então a estrutura estará restrita a
movimentos em apenas um plano, vale ressaltar que toda a massa da caixa estará
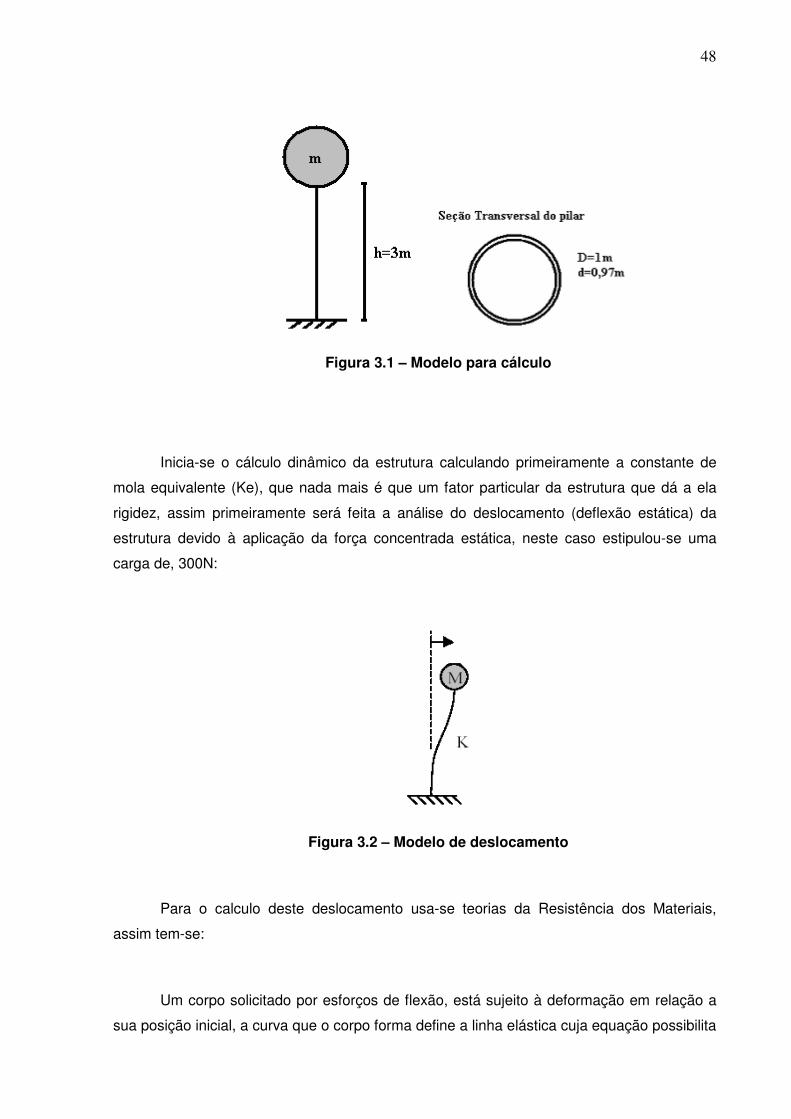
concentrada em um único ponto como mostra a figura 3.1 abaixo:
48
Figura 3.1 – Modelo para cálculo
Inicia-se o cálculo dinâmico da estrutura calculando primeiramente a constante de
mola equivalente (Ke), que nada mais é que um fator particular da estrutura que dá a ela
rigidez, assim primeiramente será feita a análise do deslocamento (deflexão estática) da
estrutura devido à aplicação da força concentrada estática, neste caso estipulou-se uma
carga de, 300N:
Figura 3.2 – Modelo de deslocamento
Para o calculo deste deslocamento usa-se teorias da Resistência dos Materiais,
assim tem-se:
Um corpo solicitado por esforços de flexão, está sujeito à deformação em relação a
sua posição inicial, a curva que o corpo forma define a linha elástica cuja equação possibilita
49
determinar o deslocamento transversal ou flecha, o deslocamento angular ou giro de
qualquer posição ao longo do eixo do corpo (KOMATSU,2006).
A equação diferencial da linha elástica é dada por:
2
32
2
2
1
1
∂
∂+
∂
∂
=
x
u
x
u
r (Equação 3.2)
Onde v∂ é diferencial de deslocamento e r é o raio da linha elástica. Fazendo
algumas modificações com equações da Lei de Hooke e admitindo pequenas deformações
tem-se:
ZEI
M
x
u−=
∂
∂2
2
(Equação 3.3)
Onde M é o momento fletor, E o módulo de elasticidade, e Iz o momento de inércia
em relação ao eixo z.
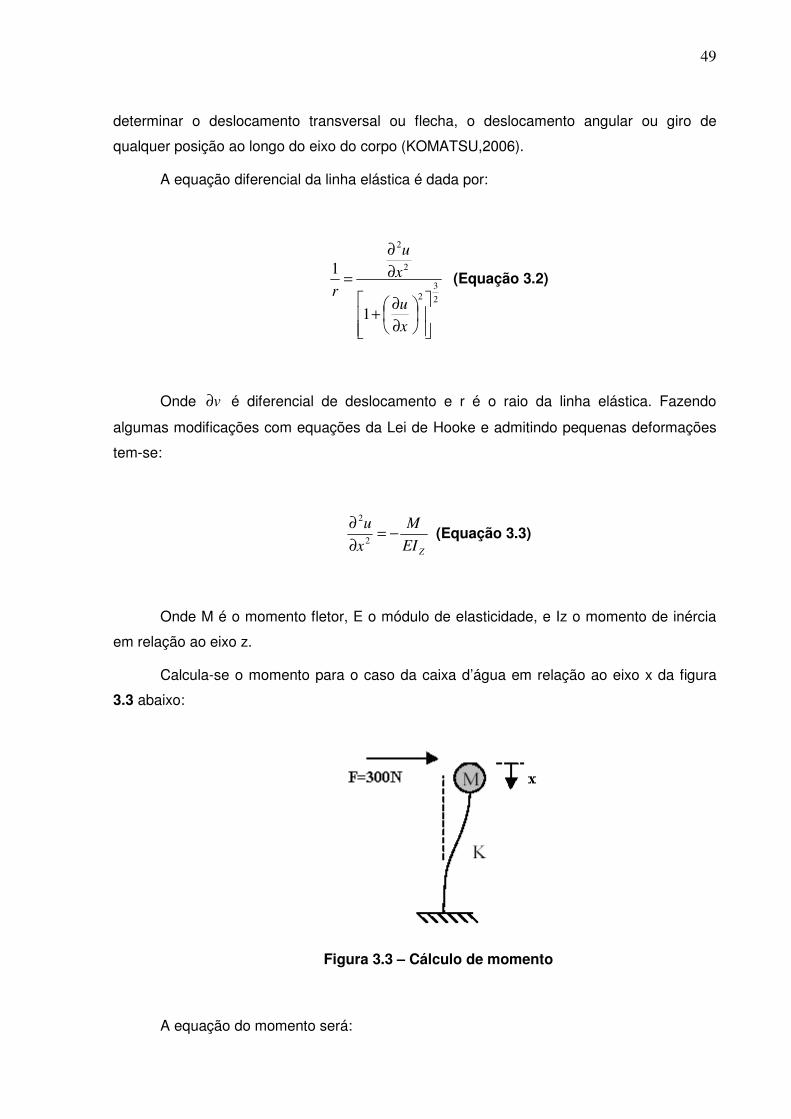
Calcula-se o momento para o caso da caixa d’água em relação ao eixo x da figura
3.3 abaixo:
Figura 3.3 – Cálculo de momento
A equação do momento será:

50
xFxM 300−=−= (Equação 3.4)
Coloca-se na equação 3.5 a equação de momento e respeitando as condições de
contorno exigidas, chegamos que o deslocamento (u) no ponto x = 0, será:
ZEI
Flu
3
3
= (Equação 3.5) u = 2,339x10-6 m
Cálculo do momento de inércia Iz:
( ) 4344
106306,564
mxdD
I Z
−=−
= π (Equação 3.6)
Dados:
• E (aço) = 20500 kN/cm²
• Densidade do aço = 7860 kg/m³
Agora já se tem dados suficientes para o cálculo da constante de mola equivalente
da estrutura:
δ
Fke = (Equação 3.7)
3
3
l
EIk Z
e = (Equação 3.8)
mNXke /10555,128252 3=
Para o cálculo da freqüência natural deve-se calcular a massa total da estrutura de
foi discretizada em apenas um ponto, assim como temos a densidade do aço, basta efetuar
o calculo do volume real de aço que a estrutura possui:
51
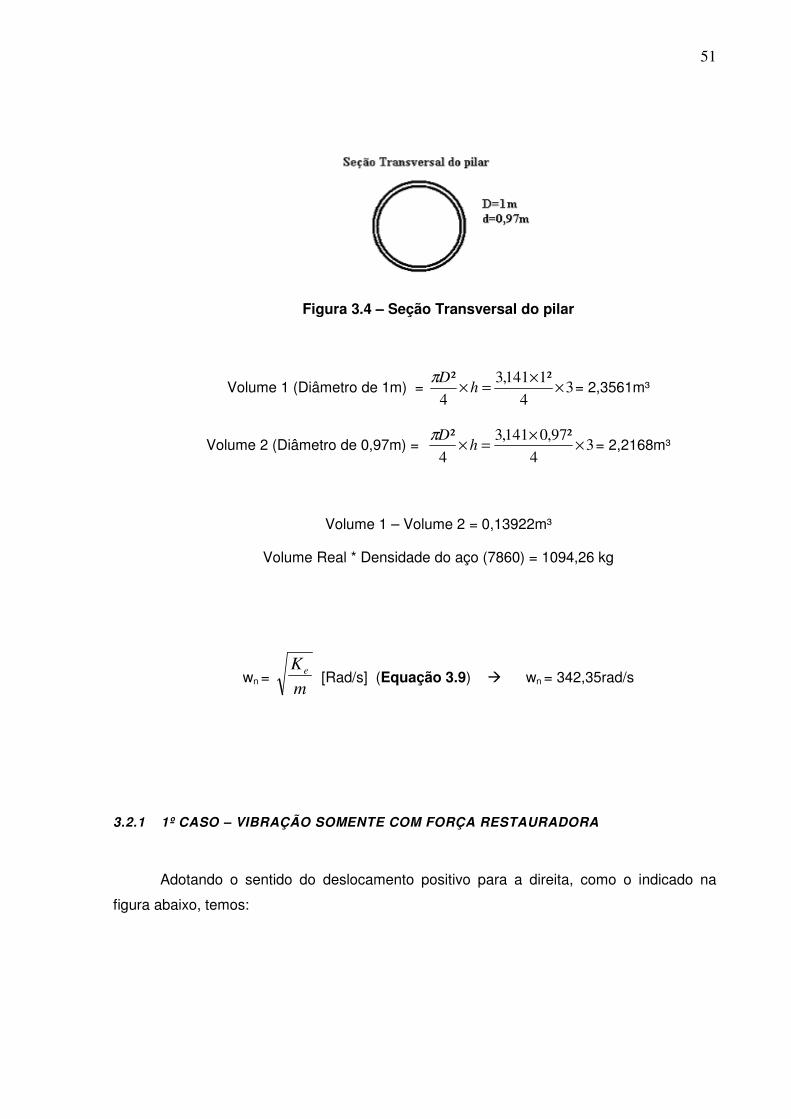
Figura 3.4 – Seção Transversal do pilar
Volume 1 (Diâmetro de 1m) = 34
²1141,3
4
²×
×=× h
Dπ= 2,3561m³
Volume 2 (Diâmetro de 0,97m) = 34
²97,0141,3
4
²×
×=× h
Dπ= 2,2168m³
Volume 1 – Volume 2 = 0,13922m³
Volume Real * Densidade do aço (7860) = 1094,26 kg
wn = m
Ke [Rad/s] (Equação 3.9) wn = 342,35rad/s
3.2.1 1º CASO – VIBRAÇÃO SOMENTE COM FORÇA RESTAURADORA
Adotando o sentido do deslocamento positivo para a direita, como o indicado na
figura abaixo, temos:
52
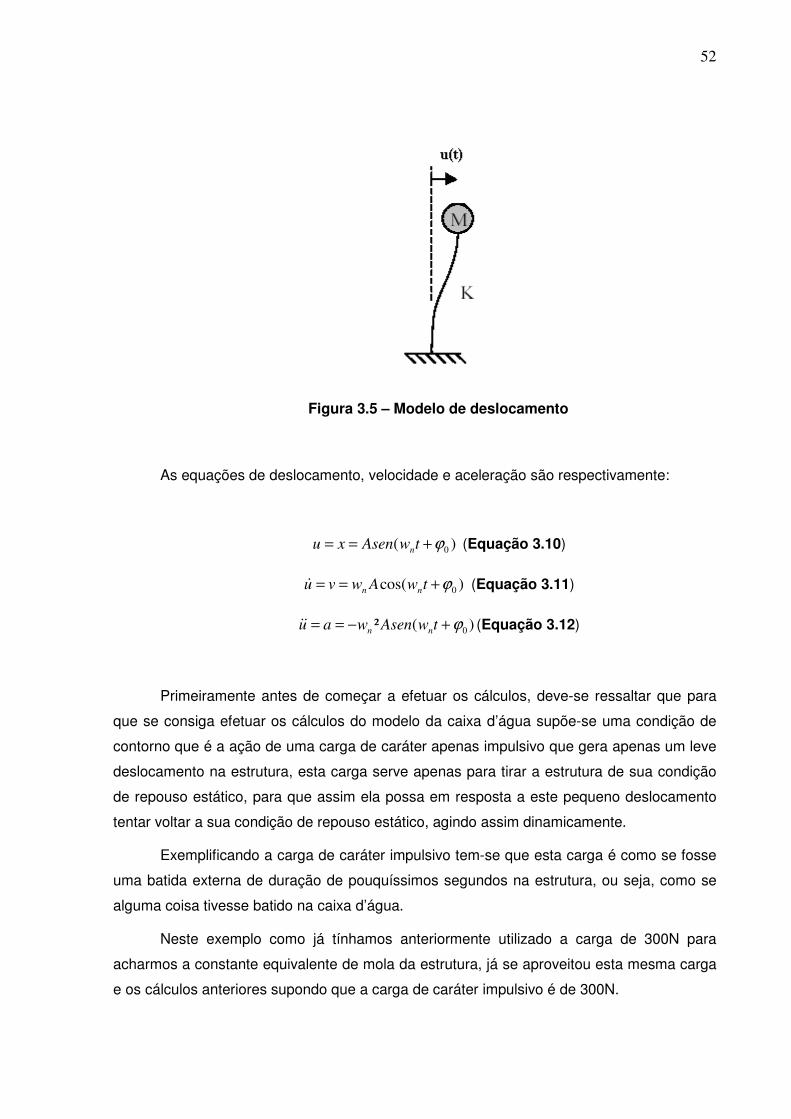
Figura 3.5 – Modelo de deslocamento
As equações de deslocamento, velocidade e aceleração são respectivamente:
)( 0ϕ+== twAsenxu n (Equação 3.10)
)cos( 0ϕ+== twAwvu nn& (Equação 3.11)
)(² 0ϕ+−== twAsenwau nn&& (Equação 3.12)
Primeiramente antes de começar a efetuar os cálculos, deve-se ressaltar que para
que se consiga efetuar os cálculos do modelo da caixa d’água supõe-se uma condição de
contorno que é a ação de uma carga de caráter apenas impulsivo que gera apenas um leve
deslocamento na estrutura, esta carga serve apenas para tirar a estrutura de sua condição
de repouso estático, para que assim ela possa em resposta a este pequeno deslocamento
tentar voltar a sua condição de repouso estático, agindo assim dinamicamente.
Exemplificando a carga de caráter impulsivo tem-se que esta carga é como se fosse
uma batida externa de duração de pouquíssimos segundos na estrutura, ou seja, como se
alguma coisa tivesse batido na caixa d’água.
Neste exemplo como já tínhamos anteriormente utilizado a carga de 300N para
acharmos a constante equivalente de mola da estrutura, já se aproveitou esta mesma carga
e os cálculos anteriores supondo que a carga de caráter impulsivo é de 300N.
53
Deve-se ressaltar principalmente que neste exemplo o ponto inicial para os cálculos
de velocidade, aceleração e deslocamento, ocorre após o momento em que a carga recebe
a força impulsiva e se encontra no ponto O (origem), ou seja, momento em que t = 0.
A trajetória da carga pode ser ilustrada na figura 7.6, primeiramente ela se encontra
em O, após a ação da força Impulsiva ela vai para o ponto A, seguindo para O e logo depois
para o ponto B, após passar pelo ponto B a carga retorna para O, onde o ciclo se fecha.
Figura 3.6 – Modelo da trajetória.
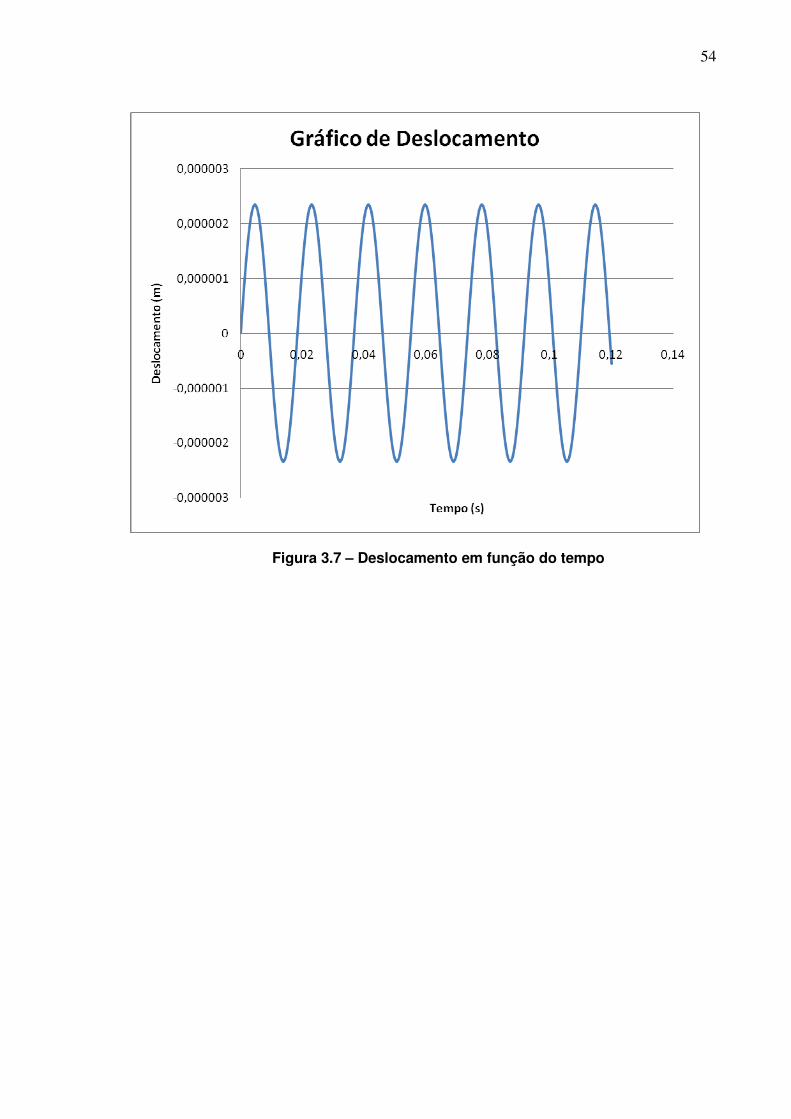
Dos dados acima, temos que wn = 342,35 rad/s, A= u = 2,339x10-6 m, e 00 =ϕ ,
assim:
)35,342(10339,2 6 tsenxxu −== (Equação 3.13)
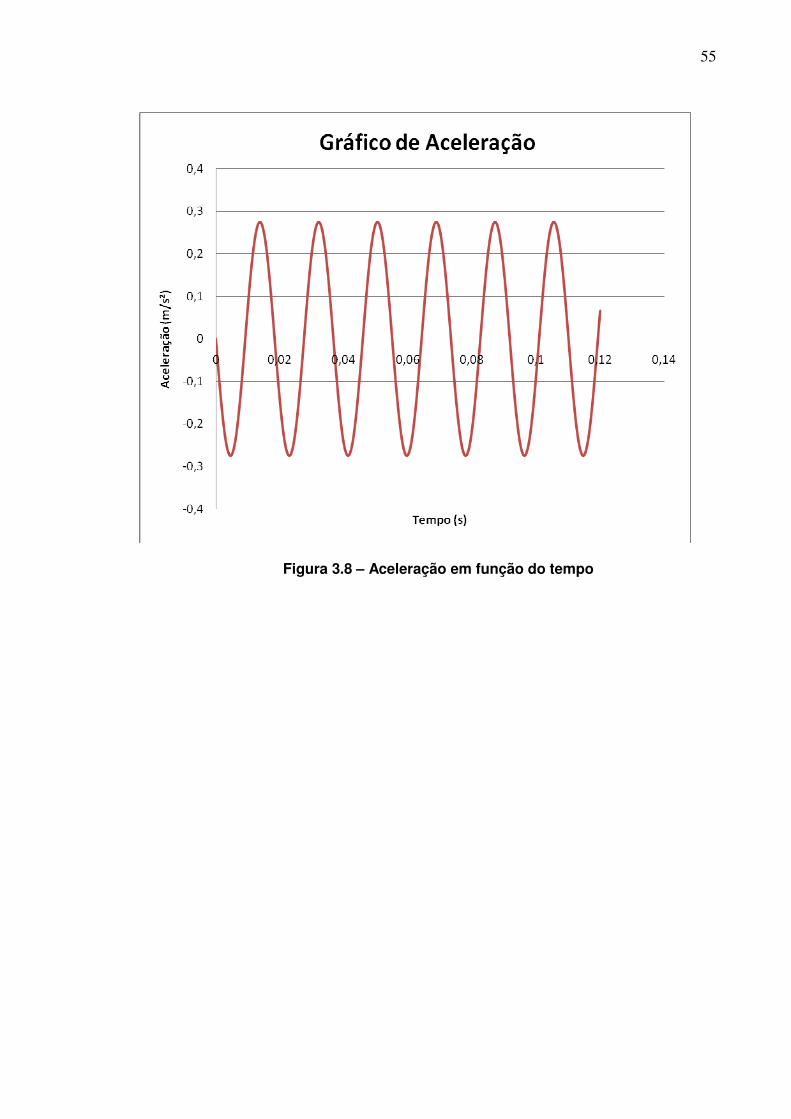
)35,342(27413,0 tsenau −==&& (Equação 3.14)
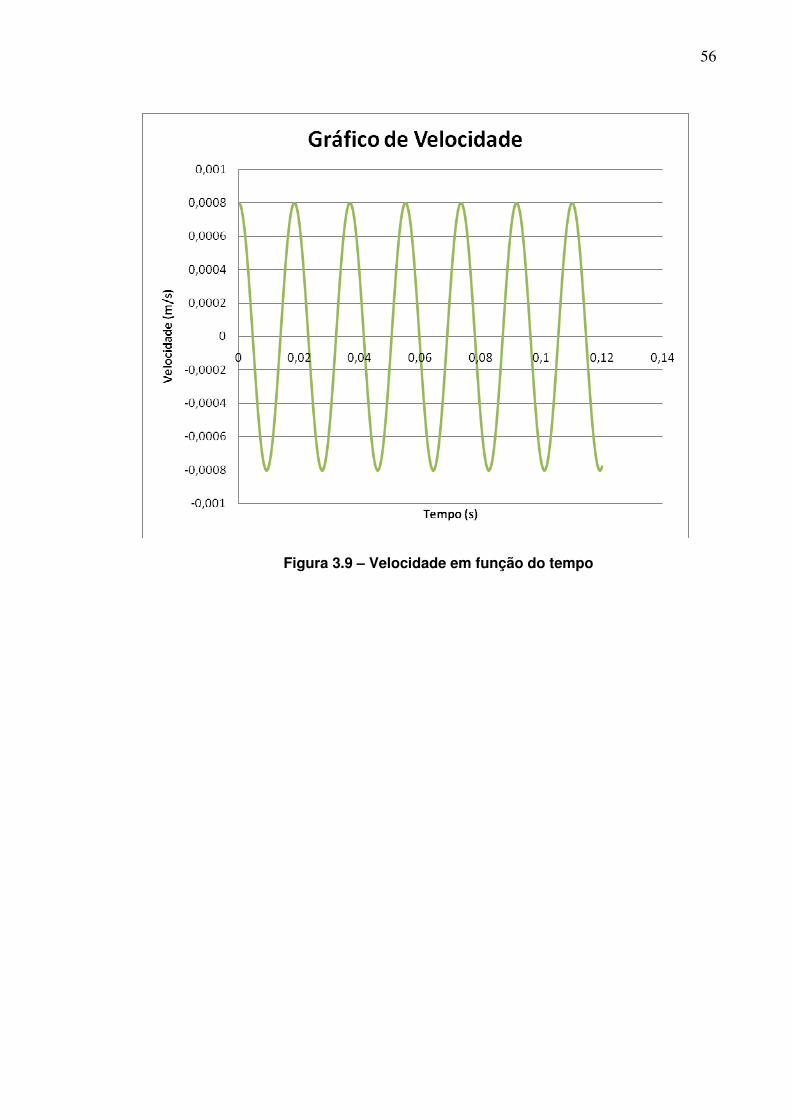
)35,342cos(100075,8 4 txvu −==& (Equação 3.15)
Assim, plota-se as funções e as apresenta nas figuras 3.7, 3.8, 3.9, 3.10:
54
Figura 3.7 – Deslocamento em função do tempo
55
Figura 3.8 – Aceleração em função do tempo
56
Figura 3.9 – Velocidade em função do tempo
57
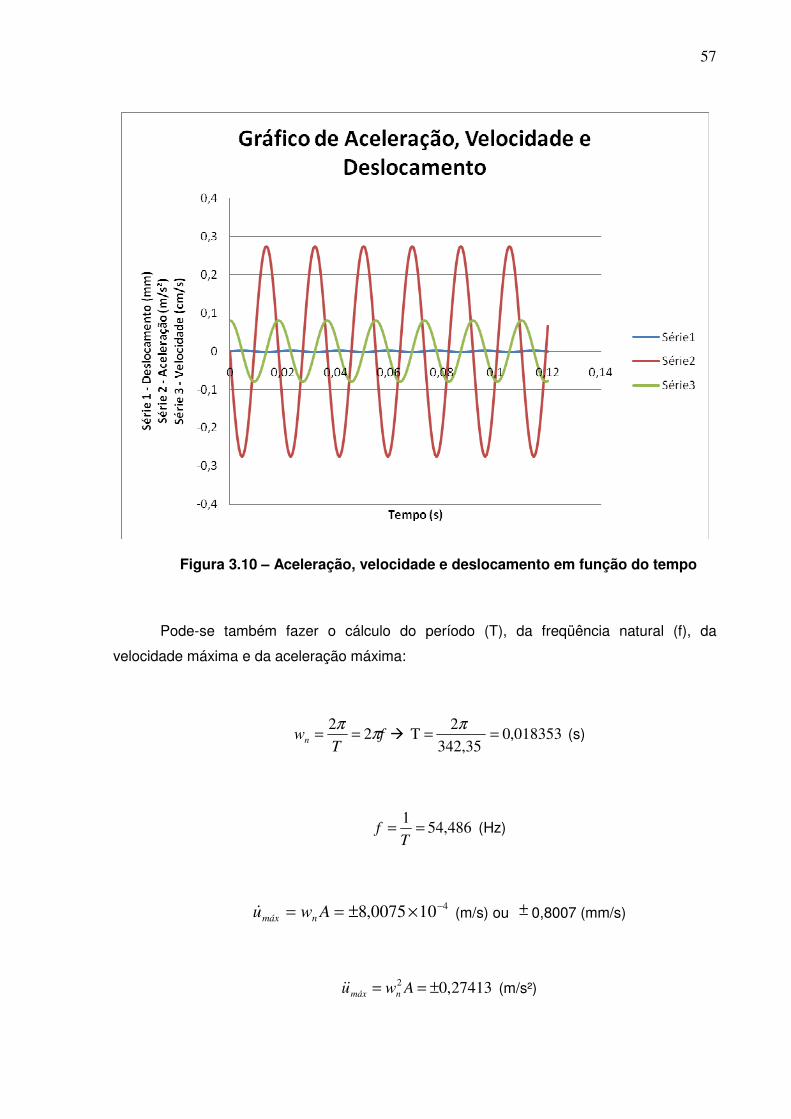
Figura 3.10 – Aceleração, velocidade e deslocamento em função do tempo
Pode-se também fazer o cálculo do período (T), da freqüência natural (f), da
velocidade máxima e da aceleração máxima:
fT
wn ππ
22
== 018353,0 342,35
2T ==
π (s)
486,541
==T
f (Hz)
4100075,8 −×±== Awu nmáx& (m/s) ou ± 0,8007 (mm/s)
27413,02 ±== Awu nmáx&& (m/s²)
58
É perceptível pela que as três curvas possuem o mesmo período e mesma
freqüência, diferenciando-se um dos outros nos valores do eixo y, o que é obvio, pois se
tratam de diferentes propriedades analisadas. O fato de no ponto inicial eles começarem
com formas diferentes nas curvas como por exemplo, a curva de deslocamento começa com
uma crista, e a curva de aceleração começa com um vale, mostra a correspondência entre a
velocidade, deslocamento e aceleração de acordo com o sentido adotado. Assim, quando o
deslocamento atinge a amplitude máxima positiva a aceleração e a máxima negativa e a
velocidade é zero, quando o deslocamento é zero, a aceleração também e zero e a
velocidade é a máxima.
3.2.1.1 Cálculo da velocidade pelo conceito de conservação de energia
Seguindo o exemplo anterior acima, podemos calcular qual a velocidade do corpo
quando o deslocamento for de 6100,2 −×=u m, assim:
46 105081,3)²10339,2².(486,54².).26,1094.(2²²²2 −− ×=== xAfmEmec ππ
2
)²102).(1055,128252(
2
²)(26,1094 63 −
+=+=xxv
EEE pcmec
Resolve-se a equação acima se obtêm que 41015,4 −×=u& m/s, o que pode ser
verificado nos gráficos de deslocamento e velocidade acima.
3.2.2 2º CASO – FORÇA RESTAURADORA LINEAR E FORÇA HARMÔNICA
Neste caso temos para o mesmo exemplo da caixa d’água, a ação da força
restauradora linear, porém com a aplicação de uma força harmônica, F = F0 sen(wt). Abaixo
segue uma figura ilustrativa:
59
Figura 3.11 – Modelo de aplicação de força harmônica
Agora para exemplificar este caso numericamente, tem-se que:
F0 = 300 N, w = 28 rad/s .
E como o exemplo anterior tem-se que:
• wn = 342,35 (rad/s),
• u = 2,339x10-6 m
• E (aço) = 20500 KN/cm²
• m = 1094,26 Kg
• mNXke /10555,128252 3=
Assim como se vê na explicação teórica acima descrita, este tipo de movimento é
composto por uma parte transiente e outra permanente:
Solução particular:
)()/(1
/2
0 wtsenww
kFu
n
p−
= )28(103548,2 6tsenxu p
−= Equação 3.16
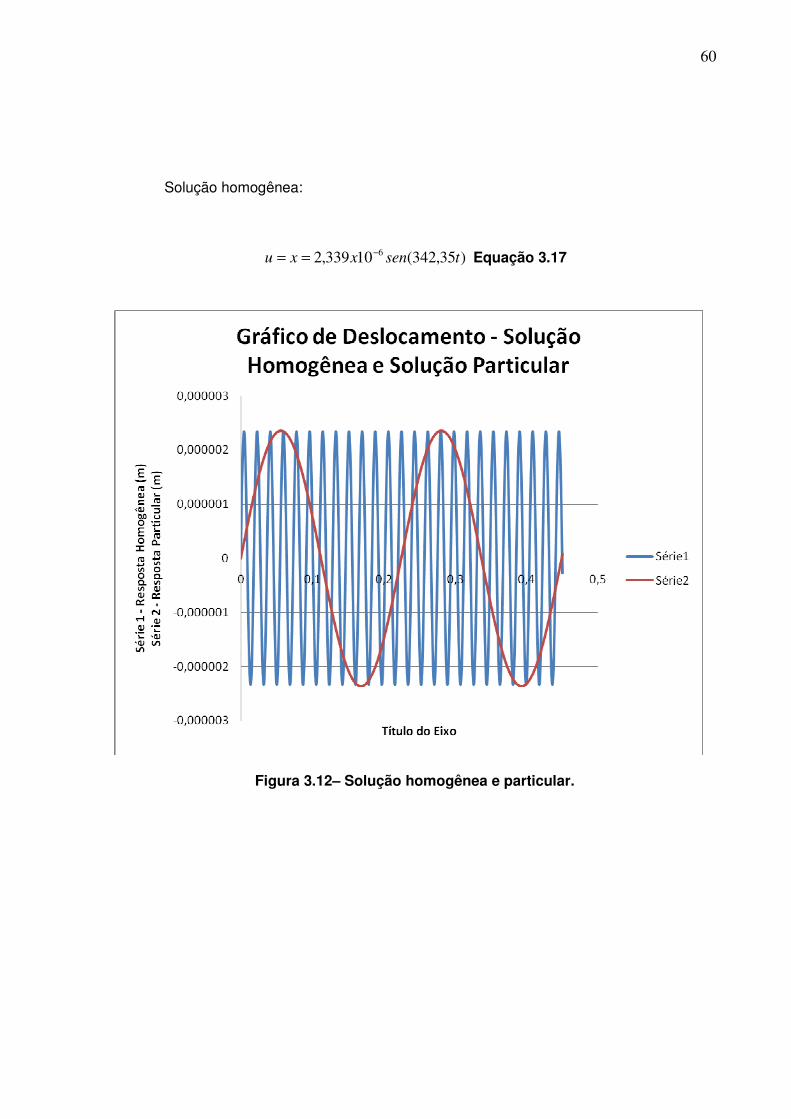
60
Solução homogênea:
)35,342(10339,2 6 tsenxxu −== Equação 3.17
Figura 3.12– Solução homogênea e particular.
61
Figura 3.13 – Supeposição de soluções.
Com a inclusão do atrito (amortecimento), fato que ocorrerá no 4º exemplo, tem-se
que a parte do movimento transiente desaparecerá.
3.2.3 3º CASO – VIBRAÇÕES COM FORÇA RESTAURADORA LINEAR E COM AMOR- TECIMENTO VISCOSO.
Figura 3.14 – Modelo de amortecimento viscoso.

62
Segue este exemplo como no primeiro caso, ou seja, sendo a caixa d’água com as
mesmas propriedades físicas, com uma força Impulsiva de 300N, com o coeficiente de
amortecimento viscoso (c) igual a 38x104 (N.s/m), e velocidade inicial igual a 8,0075x10-4
(m/s). Também se ressalta que o movimento se inicia na origem O, como mostrado na
figura 3.14.
Como explicado anteriormente, para o amortecimento viscoso são possíveis três
casos de vibrações: Superamortecido, Subamortecido e Amortecido crítico.
Tem-se que:
994,7492432 == kmcc , assim c < cc, o que caracteriza um movimento subcrítico,
onde ocorrem vibrações.
A equação do deslocamento é dada por:
)]()cos([ 21 twsenAtwAeu dd
twn += −ζ Equação 3.18,
onde 5071,0==cc
cζ ,
051,2951 2 =−= nd ww ζ (rad/s)
Substituindo os termos na equação, tem-se:
)]051,295()051,295cos([ 2160,173 tsenAtAeu t += − Equação 3.19
Para se conseguir encontrar os coeficientes A1, A2, deve-se resolver equações de
contorno como a da velocidade, que é a derivada da equação acima, assim:
Para t = 0, u = 0, o que pela equação:

63
)]051,295()051,295cos([ 2160,173 tsenAtAeu t += − , tem-se que A1 = 0.
Abaixo segue a equação da velocidade:
)]051,295cos()051,295([051,295
)]051,295()051,295cos([60,173
2160,173
2160,173
tAtsenAe
tsenAtAeu
t
t
+−+
+−=−
−&
Equação 3.20
Para t = 0 temos que 4100075,8 −= xu& (m/s), o que implica:
62 107139,2 −= xA .
Substituindo os coeficientes:
)]051,295(10739,2[ 660,173 tsenxeu t −−= Equação 3.21
Segue abaixo o gráfico desta equação:
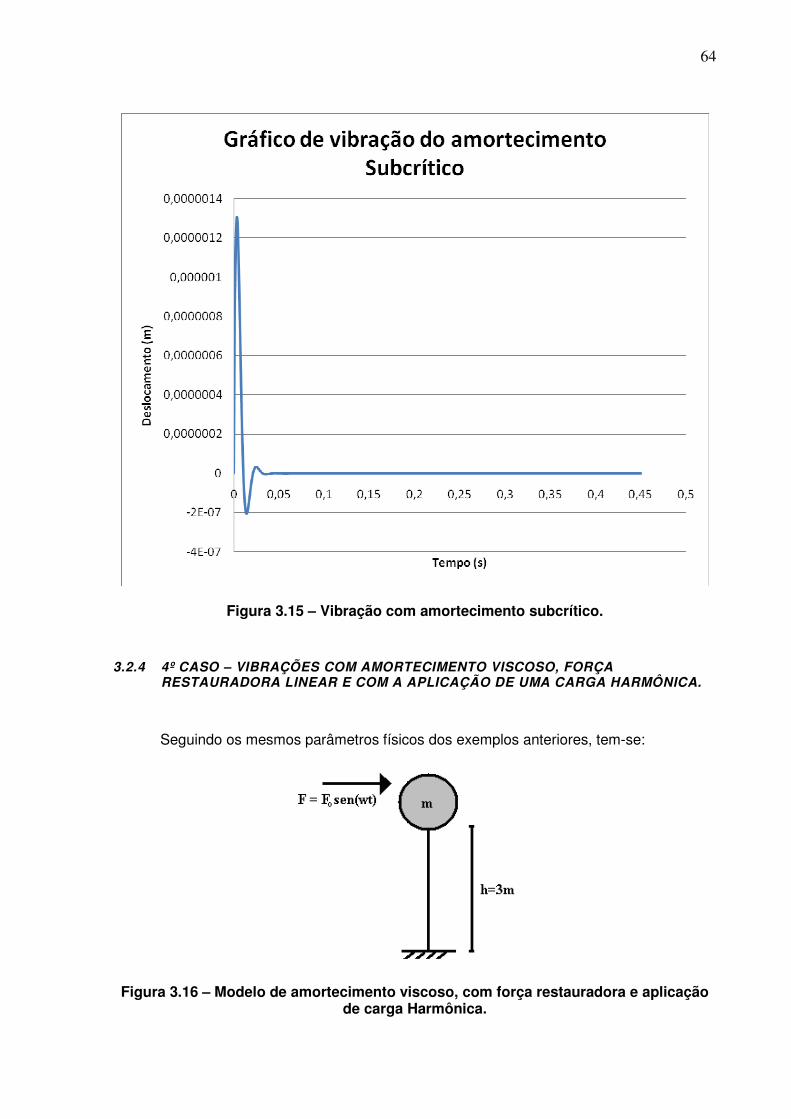
64
Figura 3.15 – Vibração com amortecimento subcrítico.
3.2.4 4º CASO – VIBRAÇÕES COM AMORTECIMENTO VISCOSO, FORÇA RESTAURADORA LINEAR E COM A APLICAÇÃO DE UMA CARGA HARMÔNICA.
Seguindo os mesmos parâmetros físicos dos exemplos anteriores, tem-se:
Figura 3.16 – Modelo de amortecimento viscoso, com força restauradora e aplicação de carga Harmônica.
65
Sendo:
• F0 = 300N;
• w = 205,41, wn = 342,35;
• 994,7492432 == kmcc (Ns/m);
• c = 112386,599 (Ns/m);
Este caso de vibração merece especial atenção devido ao fato de qu e nele são
possíveis dois tipos diferentes de respostas, sendo uma a solução particular da eq.
Diferencial, e outra a solução particular somada com a solução homogênea.
No primeiro caso, onde a resposta final é somente a solução particular é uma
situação na qual a carga de massa m começa seu movimento apenas com a aplicação da
força senoidal. A resposta para este caso é chamada: Resposta Transiente.
O segundo caso que se caracteriza pela solução geral (soma da solução particular
com a solução homogênea), ocorre quando anteriormente a aplicação da força senoidal
sobre a carga m, esta carga já está em movimento devido a uma aplicação anterior de uma
força qualquer de caráter Impulsivo. A resposta para este caso é chamada: Resposta
Permanente.
Neste exemplo especifico, faz-se a interpretação do segundo caso, ou seja, a carga
anteriormente a aplicação da carga senoidal sofreu a ação de uma força Impulsiva.
Ressalta-se, que a ação desta força Impulsiva ocorre no momento em que a massa m se
encontra na origem O, e a ação da força senoidal começa a partir do momento em que a
massa m atinge o ponto A, como mostra a figura 3.17.
Tem-se que:
hpg uuu += (solução geral)
)]()cos([ 21 twsenAtwAeu dd
tw
hn += −ζ
(solução homogênea)

66
)( φ+= wtUsenu part (solução particular)
²1
2
)²/(1
)/)(/(2)(
r
r
ww
wwcctg
n
ncr
−=
−=
ζφ
)²(²)( 2
0
cwmwk
FU
+−=
Substituindo os valores nas equações:
15,0994,749243
599,112386===
cc
cζ
,
47,3381 2 =−= nd ww ζ (rad/s)
60,035,342
41,205===
nw
wr
)]47,338(103657,2[ 6352,51tsenxeu
t
h
−−= Equação 3.22
)2741,041,205(107973,7 6 += −tsenxu p Equação 3.23
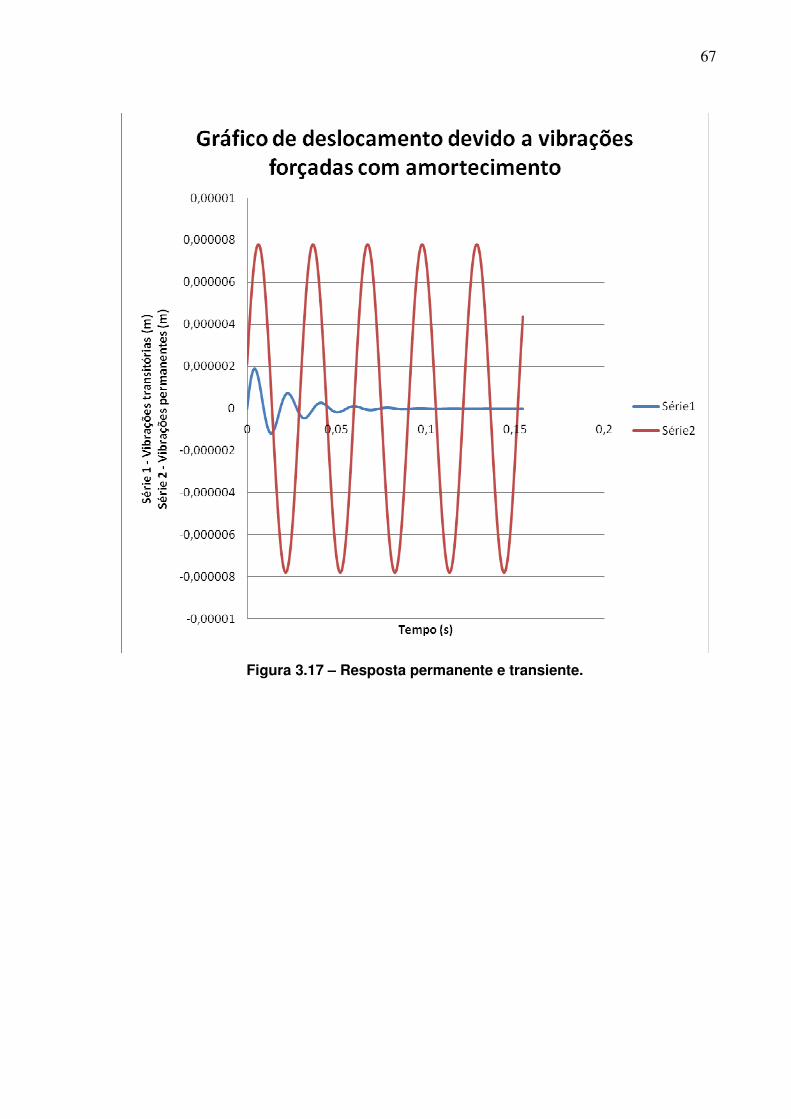
67
Figura 3.17 – Resposta permanente e transiente.
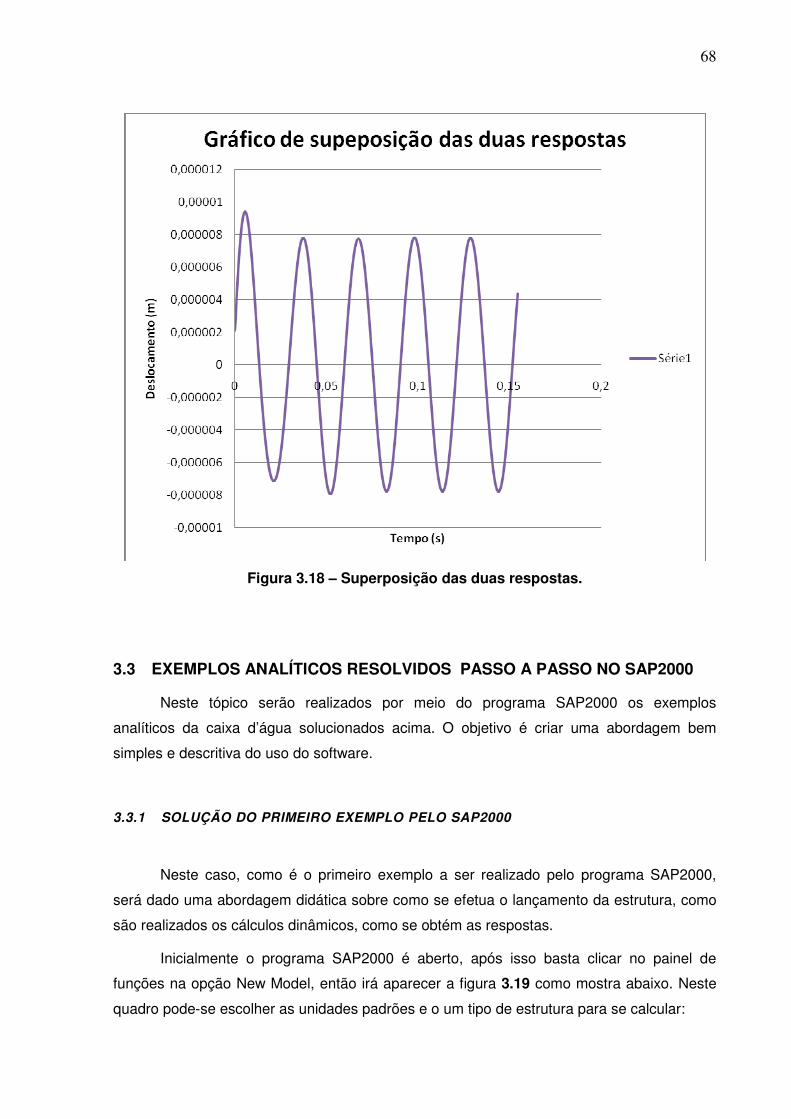
68
Figura 3.18 – Superposição das duas respostas.
3.3 EXEMPLOS ANALÍTICOS RESOLVIDOS PASSO A PASSO NO SAP2000
Neste tópico serão realizados por meio do programa SAP2000 os exemplos
analíticos da caixa d’água solucionados acima. O objetivo é criar uma abordagem bem
simples e descritiva do uso do software.
3.3.1 SOLUÇÃO DO PRIMEIRO EXEMPLO PELO SAP2000
Neste caso, como é o primeiro exemplo a ser realizado pelo programa SAP2000,
será dado uma abordagem didática sobre como se efetua o lançamento da estrutura, como
são realizados os cálculos dinâmicos, como se obtém as respostas.
Inicialmente o programa SAP2000 é aberto, após isso basta clicar no painel de
funções na opção New Model, então irá aparecer a figura 3.19 como mostra abaixo. Neste
quadro pode-se escolher as unidades padrões e o um tipo de estrutura para se calcular:
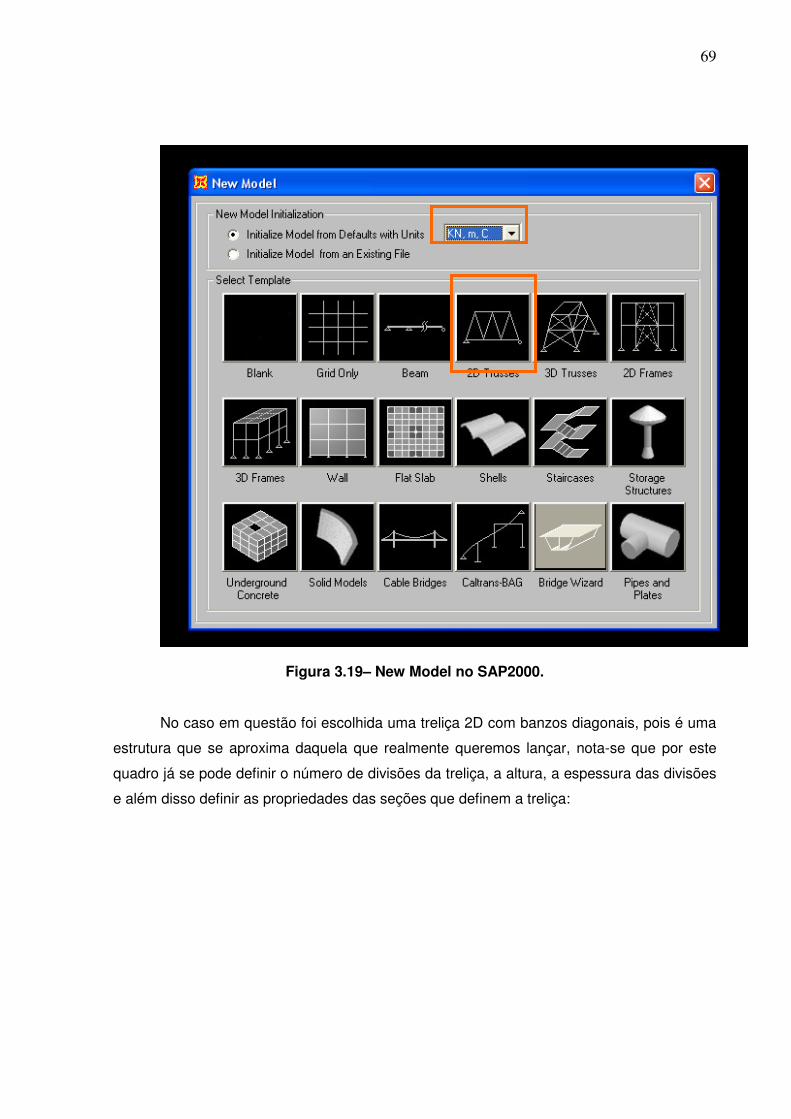
69
Figura 3.19– New Model no SAP2000.
No caso em questão foi escolhida uma treliça 2D com banzos diagonais, pois é uma
estrutura que se aproxima daquela que realmente queremos lançar, nota-se que por este
quadro já se pode definir o número de divisões da treliça, a altura, a espessura das divisões
e além disso definir as propriedades das seções que definem a treliça:
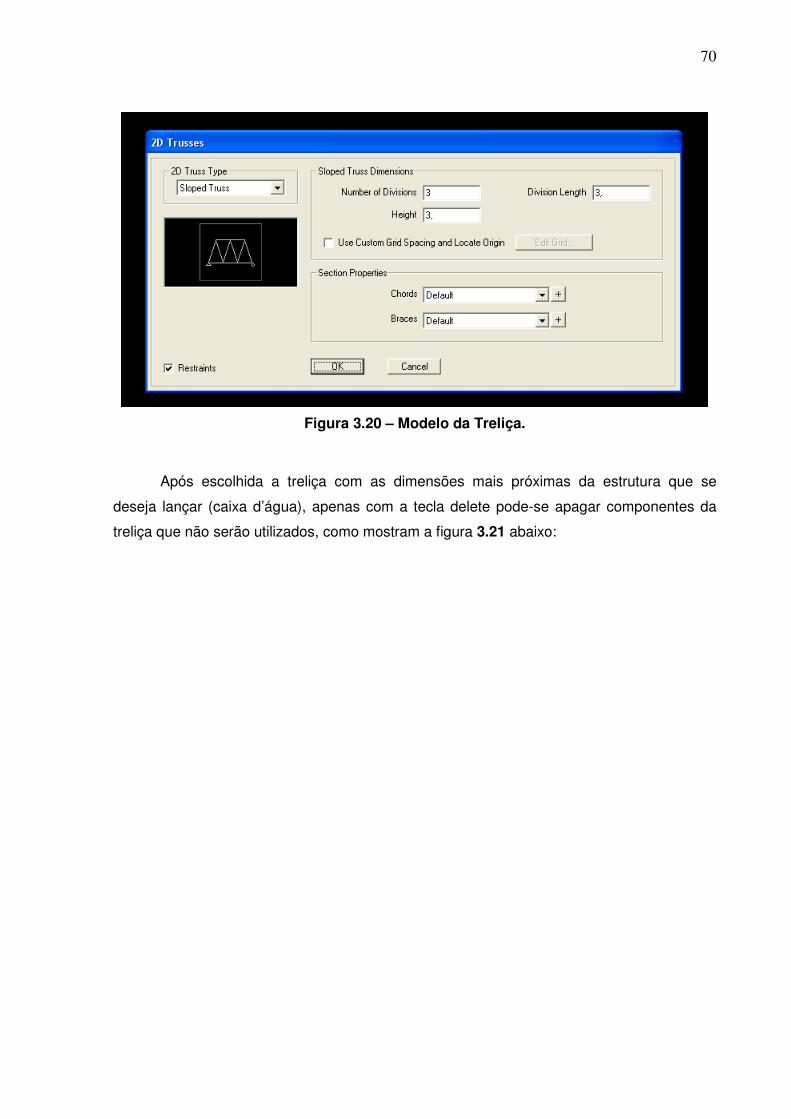
70
Figura 3.20 – Modelo da Treliça.
Após escolhida a treliça com as dimensões mais próximas da estrutura que se
deseja lançar (caixa d’água), apenas com a tecla delete pode-se apagar componentes da
treliça que não serão utilizados, como mostram a figura 3.21 abaixo:
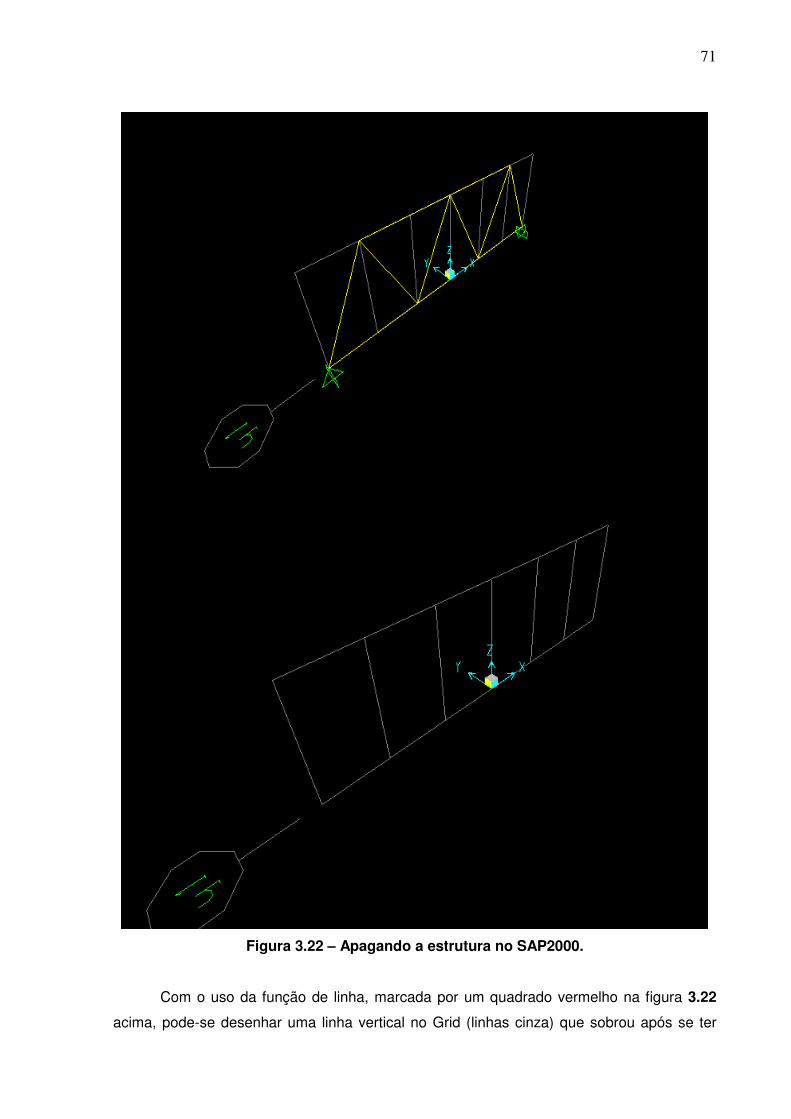
71
Figura 3.22 – Apagando a estrutura no SAP2000.
Com o uso da função de linha, marcada por um quadrado vermelho na figura 3.22
acima, pode-se desenhar uma linha vertical no Grid (linhas cinza) que sobrou após se ter
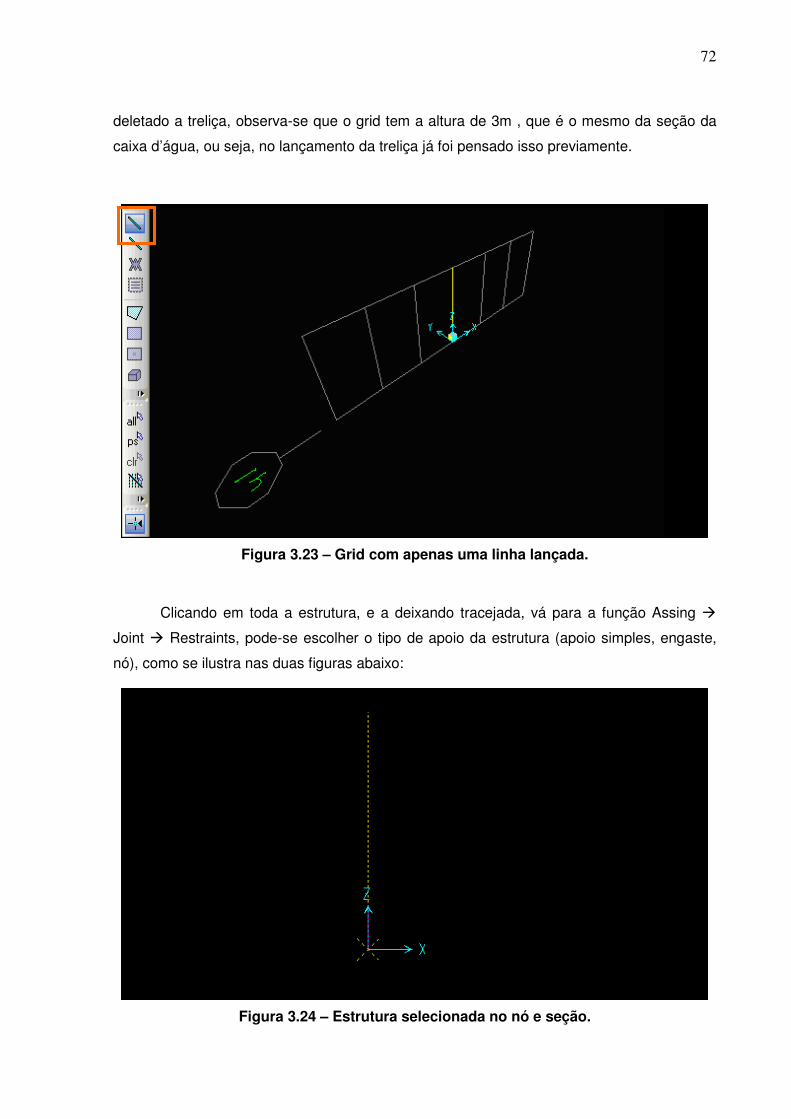
72
deletado a treliça, observa-se que o grid tem a altura de 3m , que é o mesmo da seção da
caixa d’água, ou seja, no lançamento da treliça já foi pensado isso previamente.
Figura 3.23 – Grid com apenas uma linha lançada.
Clicando em toda a estrutura, e a deixando tracejada, vá para a função Assing
Joint Restraints, pode-se escolher o tipo de apoio da estrutura (apoio simples, engaste,
nó), como se ilustra nas duas figuras abaixo:
Figura 3.24 – Estrutura selecionada no nó e seção.
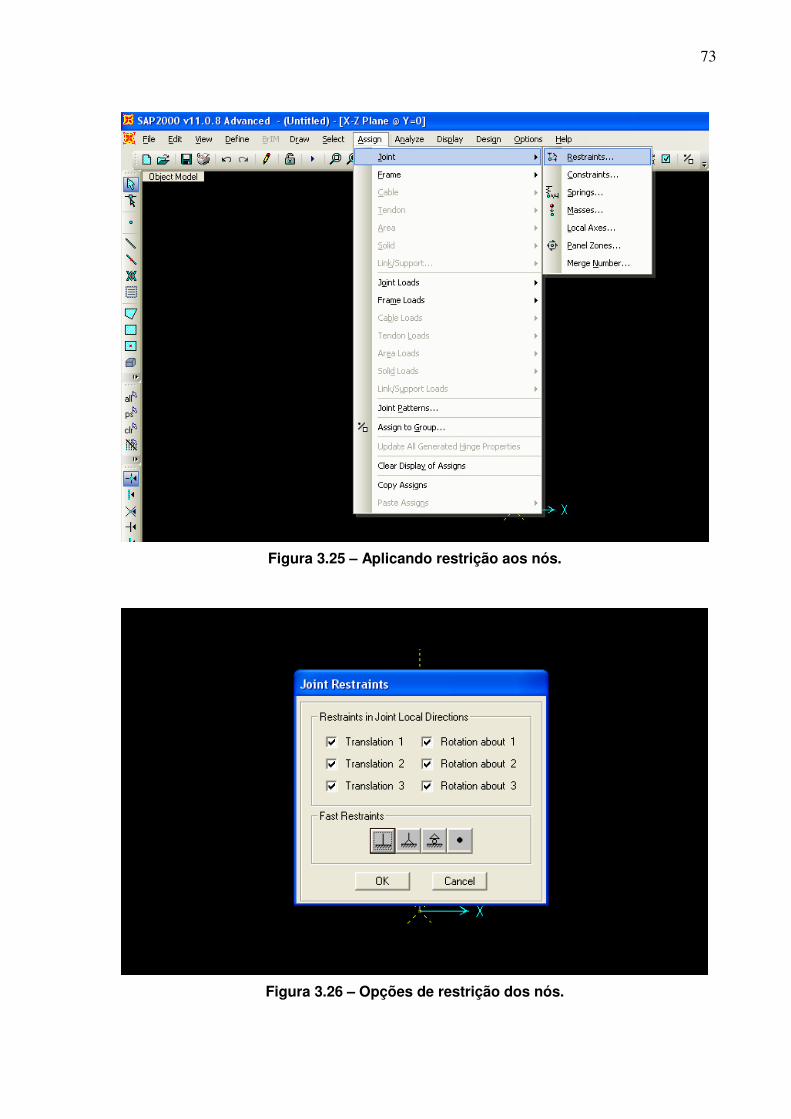
73
Figura 3.25 – Aplicando restrição aos nós.
Figura 3.26 – Opções de restrição dos nós.
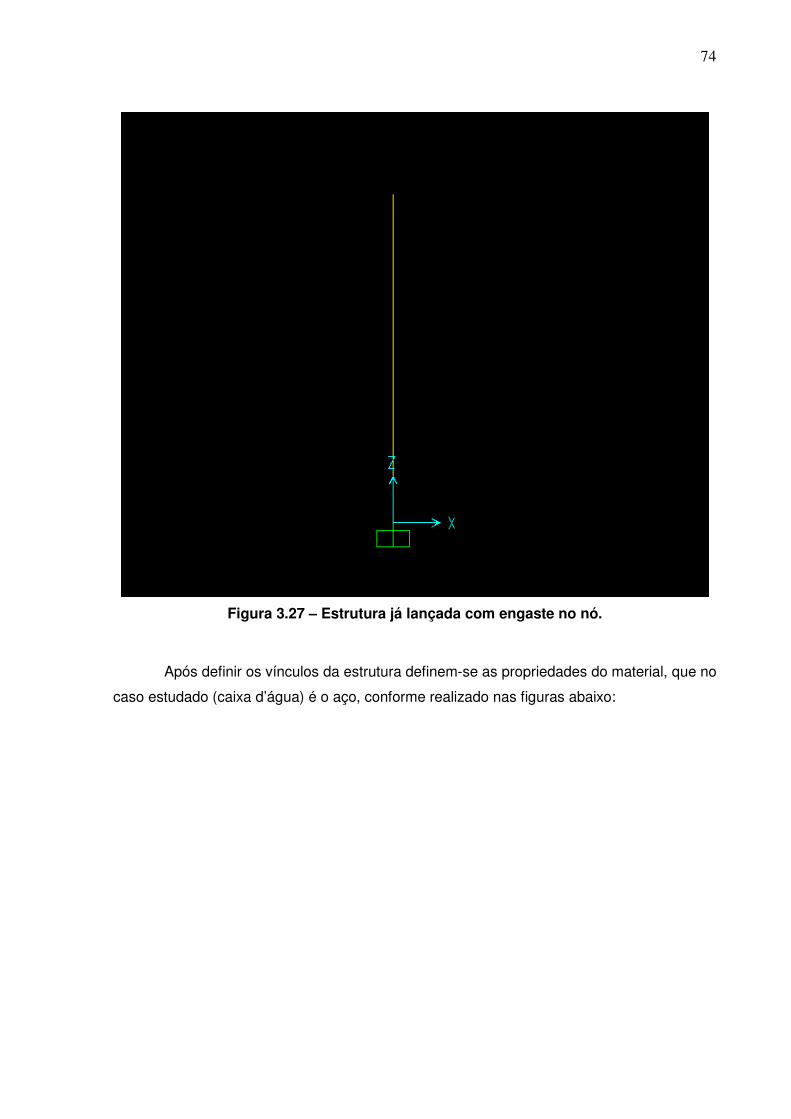
74
Figura 3.27 – Estrutura já lançada com engaste no nó.
Após definir os vínculos da estrutura definem-se as propriedades do material, que no
caso estudado (caixa d’água) é o aço, conforme realizado nas figuras abaixo:
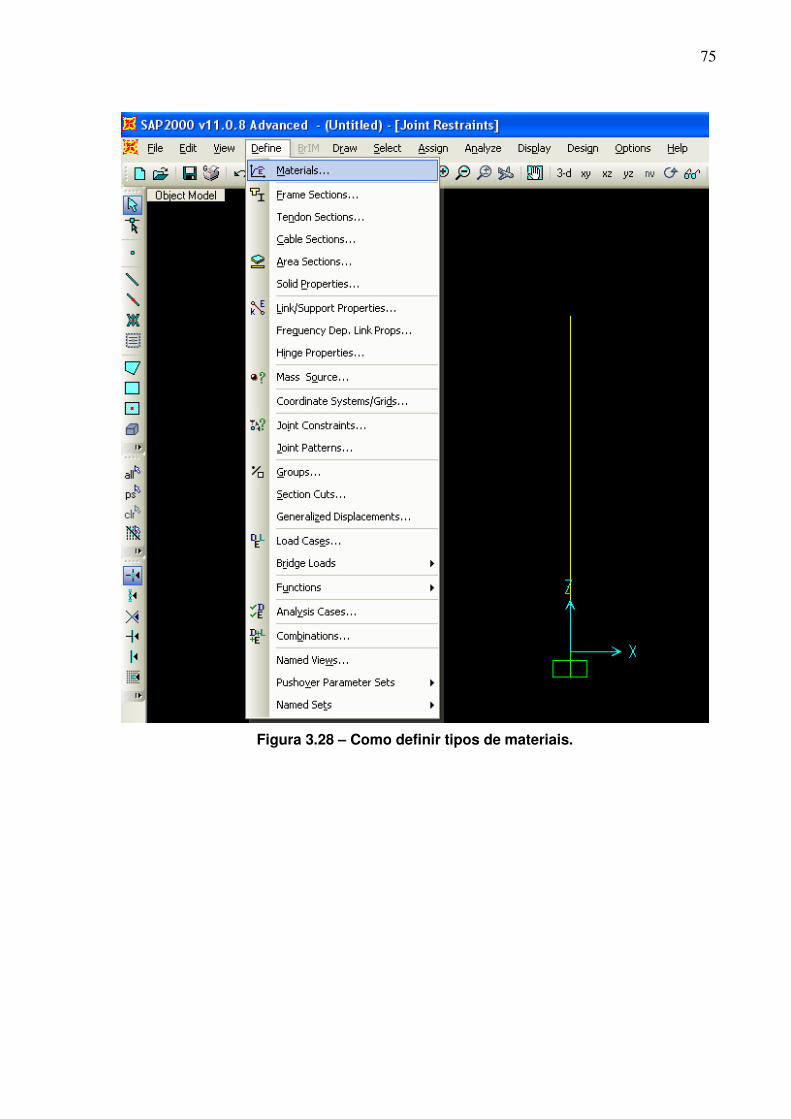
75
Figura 3.28 – Como definir tipos de materiais.
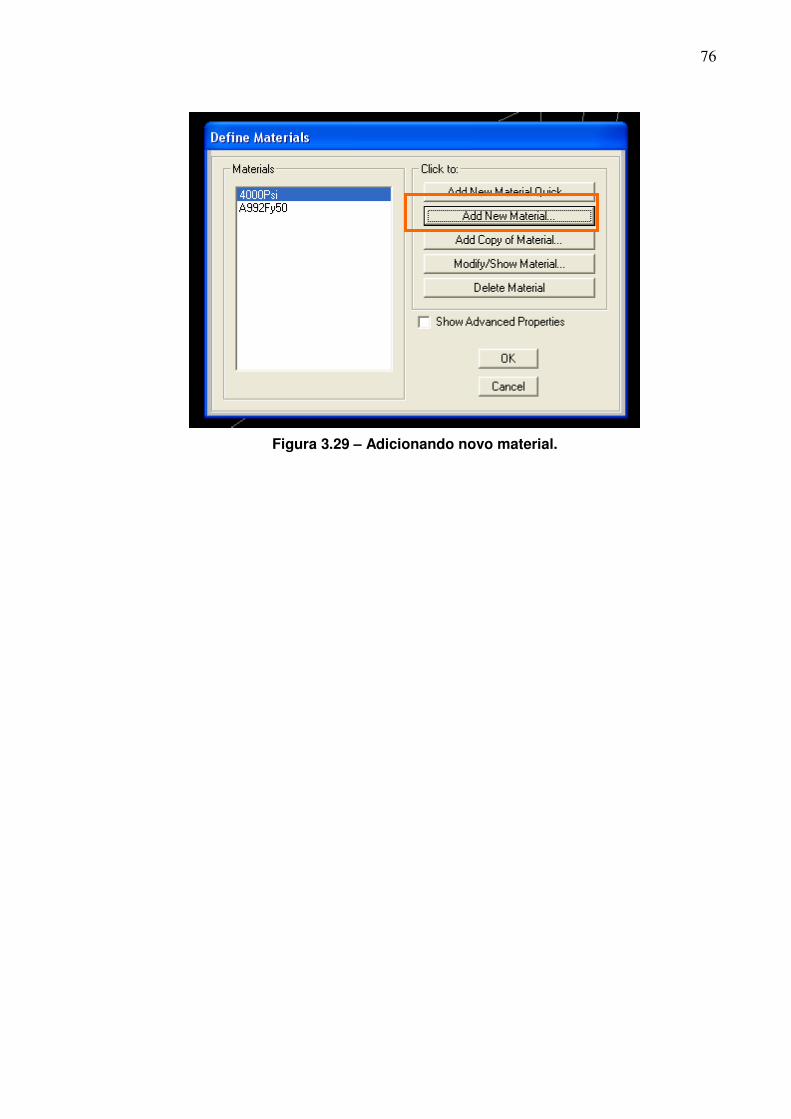
76
Figura 3.29 – Adicionando novo material.
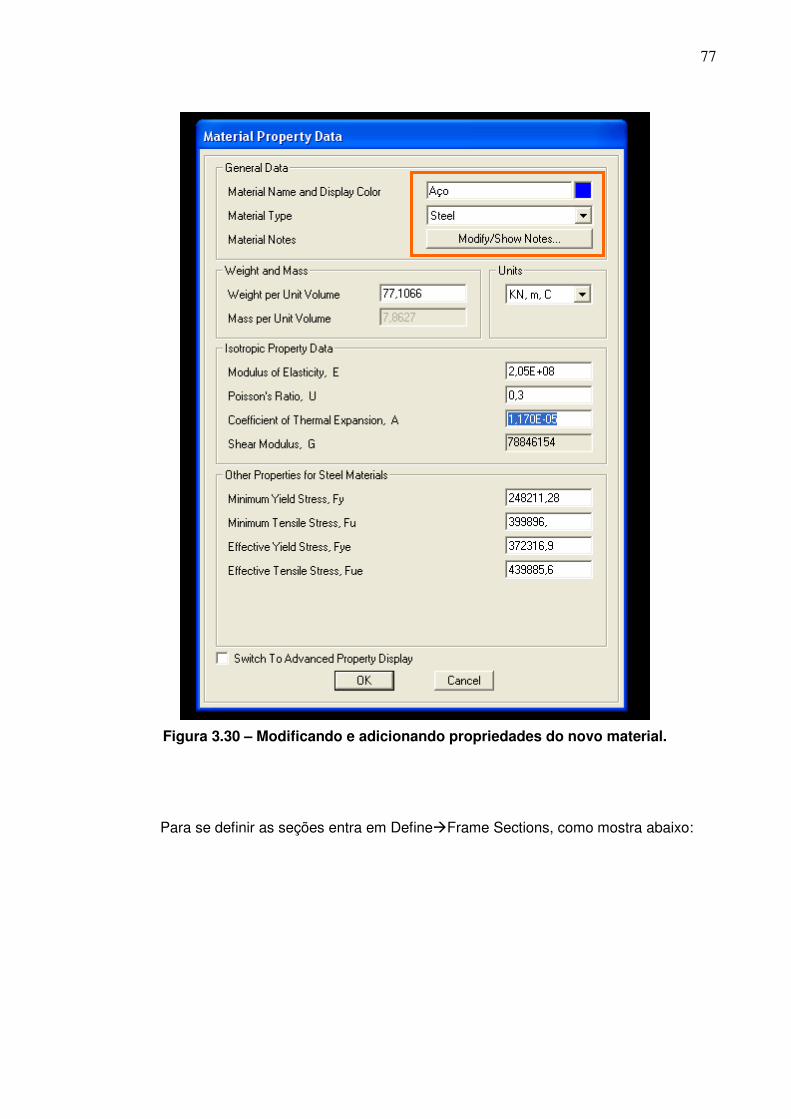
77
Figura 3.30 – Modificando e adicionando propriedades do novo material.
Para se definir as seções entra em DefineFrame Sections, como mostra abaixo:
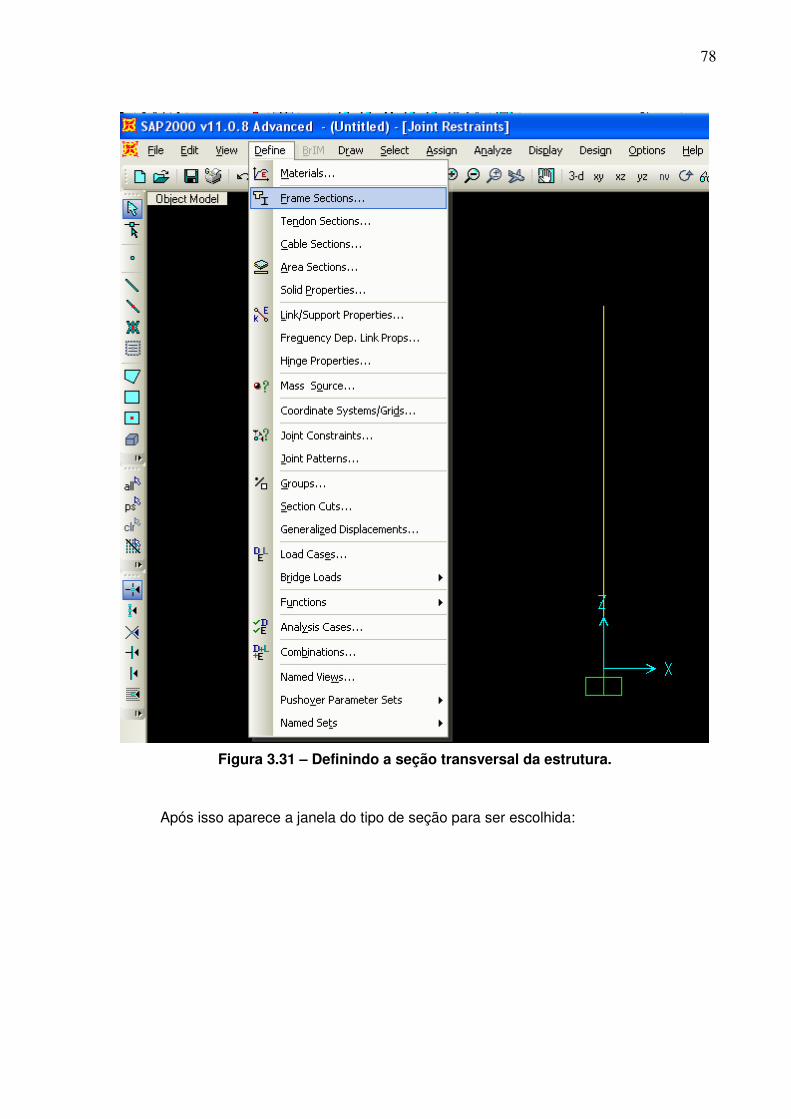
78
Figura 3.31 – Definindo a seção transversal da estrutura.
Após isso aparece a janela do tipo de seção para ser escolhida:
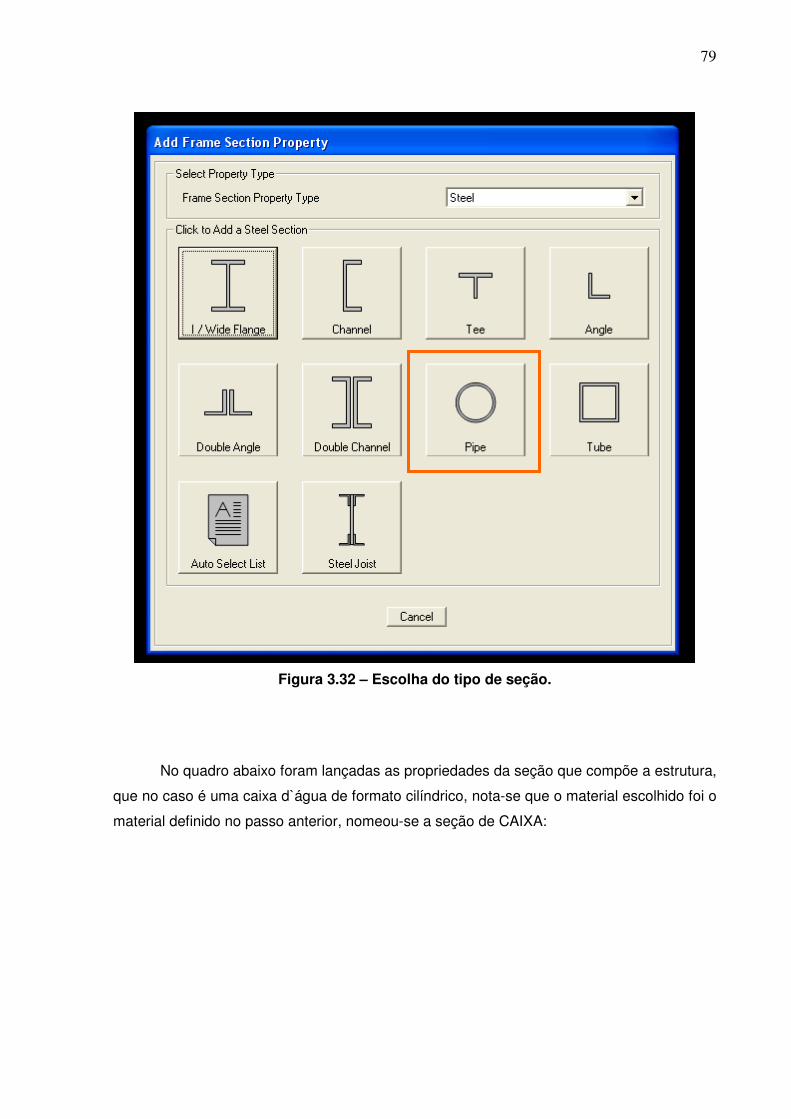
79
Figura 3.32 – Escolha do tipo de seção.
No quadro abaixo foram lançadas as propriedades da seção que compõe a estrutura,
que no caso é uma caixa d`água de formato cilíndrico, nota-se que o material escolhido foi o
material definido no passo anterior, nomeou-se a seção de CAIXA:
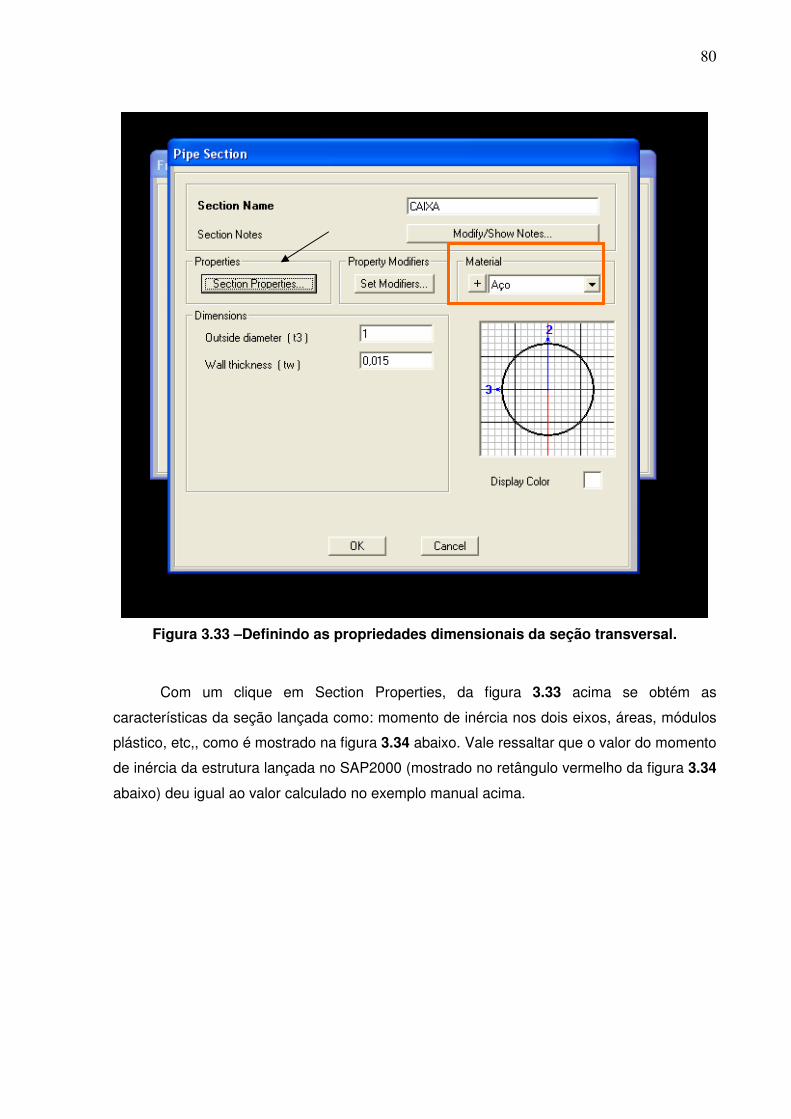
80
Figura 3.33 –Definindo as propriedades dimensionais da seção transversal.
Com um clique em Section Properties, da figura 3.33 acima se obtém as
características da seção lançada como: momento de inércia nos dois eixos, áreas, módulos
plástico, etc,, como é mostrado na figura 3.34 abaixo. Vale ressaltar que o valor do momento
de inércia da estrutura lançada no SAP2000 (mostrado no retângulo vermelho da figura 3.34
abaixo) deu igual ao valor calculado no exemplo manual acima.
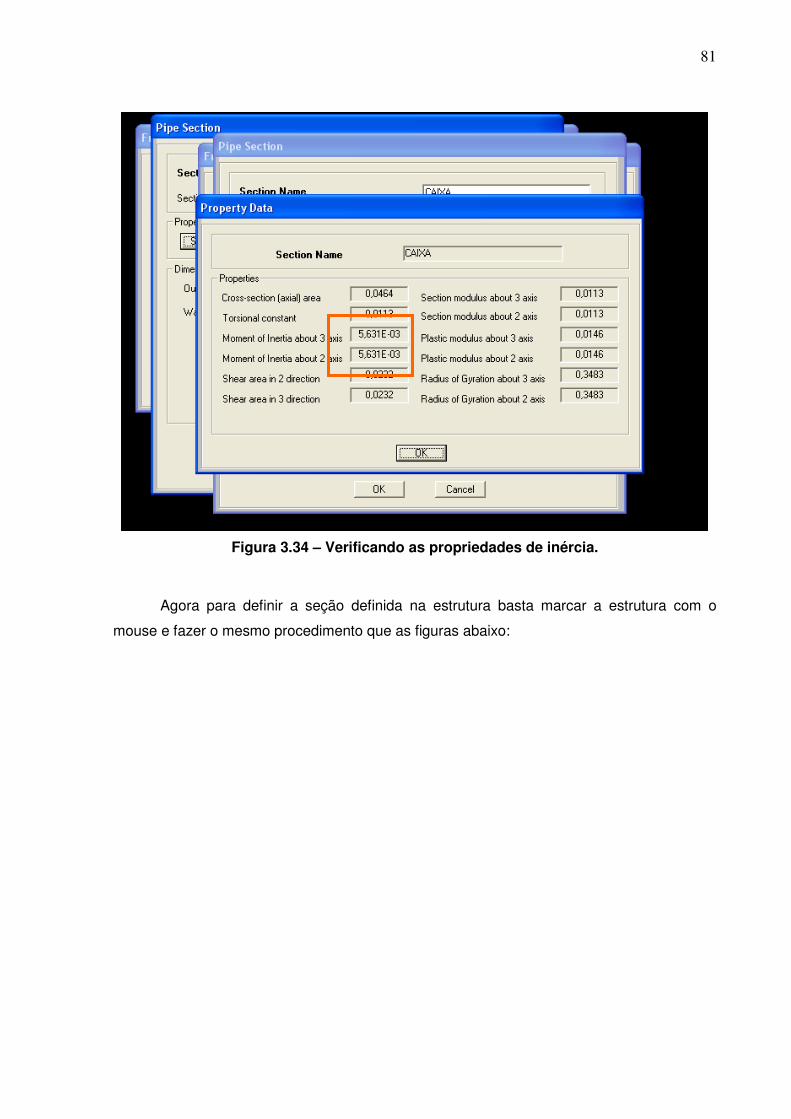
81
Figura 3.34 – Verificando as propriedades de inércia.
Agora para definir a seção definida na estrutura basta marcar a estrutura com o
mouse e fazer o mesmo procedimento que as figuras abaixo:
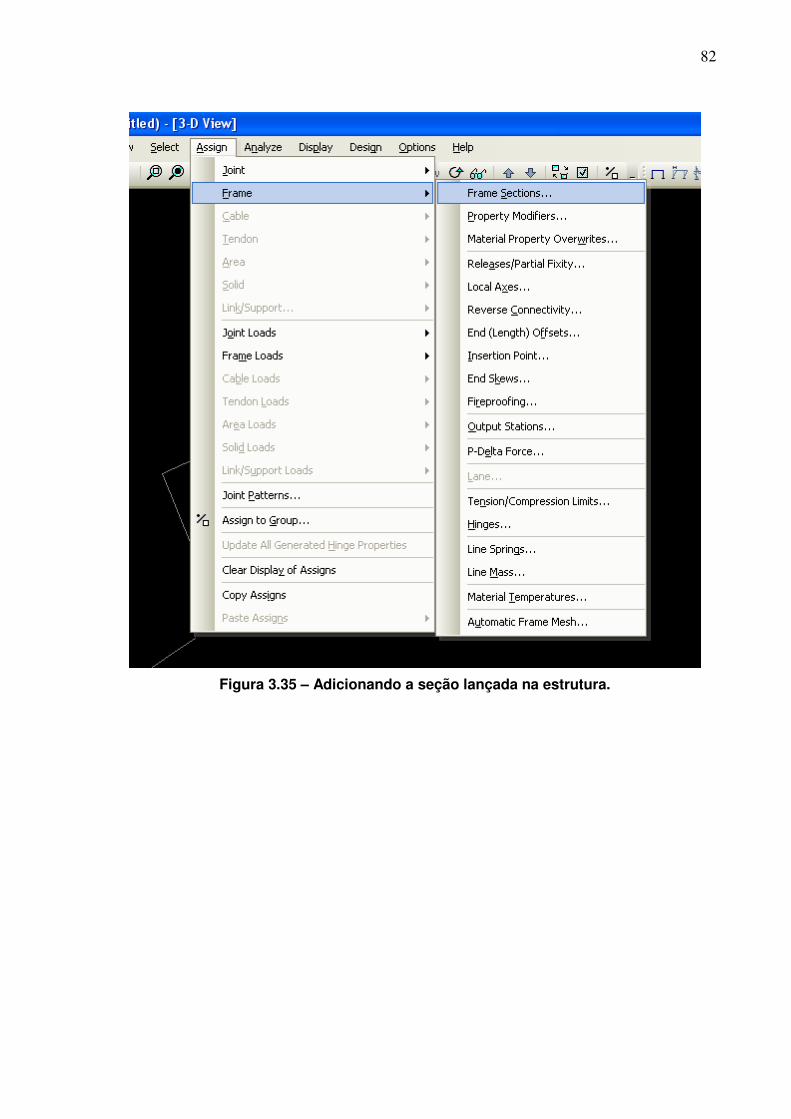
82
Figura 3.35 – Adicionando a seção lançada na estrutura.
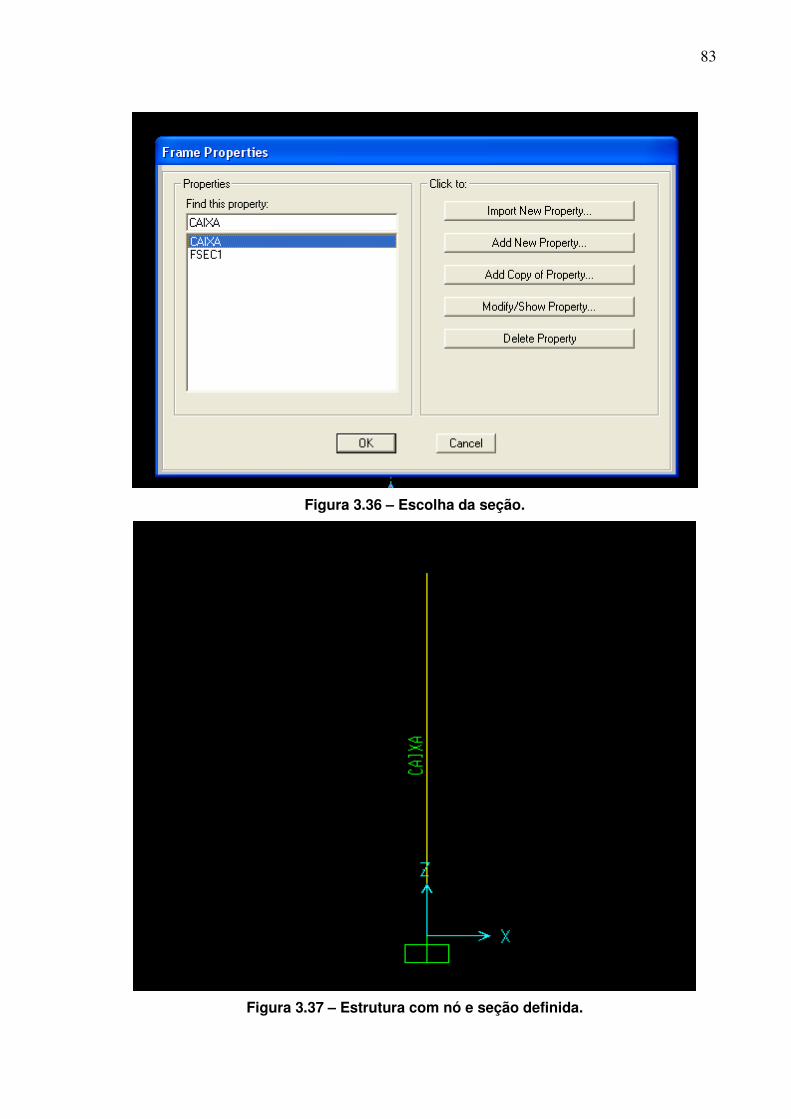
83
Figura 3.36 – Escolha da seção.
Figura 3.37 – Estrutura com nó e seção definida.
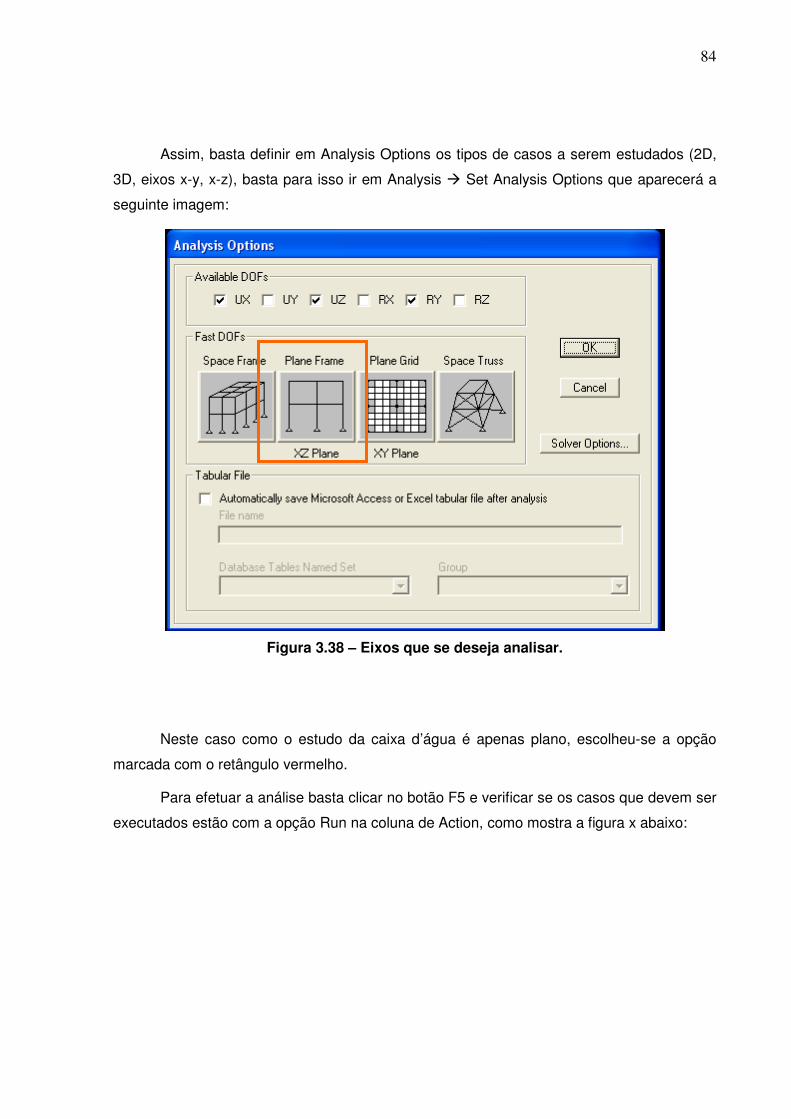
84
Assim, basta definir em Analysis Options os tipos de casos a serem estudados (2D,
3D, eixos x-y, x-z), basta para isso ir em Analysis Set Analysis Options que aparecerá a
seguinte imagem:
Figura 3.38 – Eixos que se deseja analisar.
Neste caso como o estudo da caixa d’água é apenas plano, escolheu-se a opção
marcada com o retângulo vermelho.
Para efetuar a análise basta clicar no botão F5 e verificar se os casos que devem ser
executados estão com a opção Run na coluna de Action, como mostra a figura x abaixo:
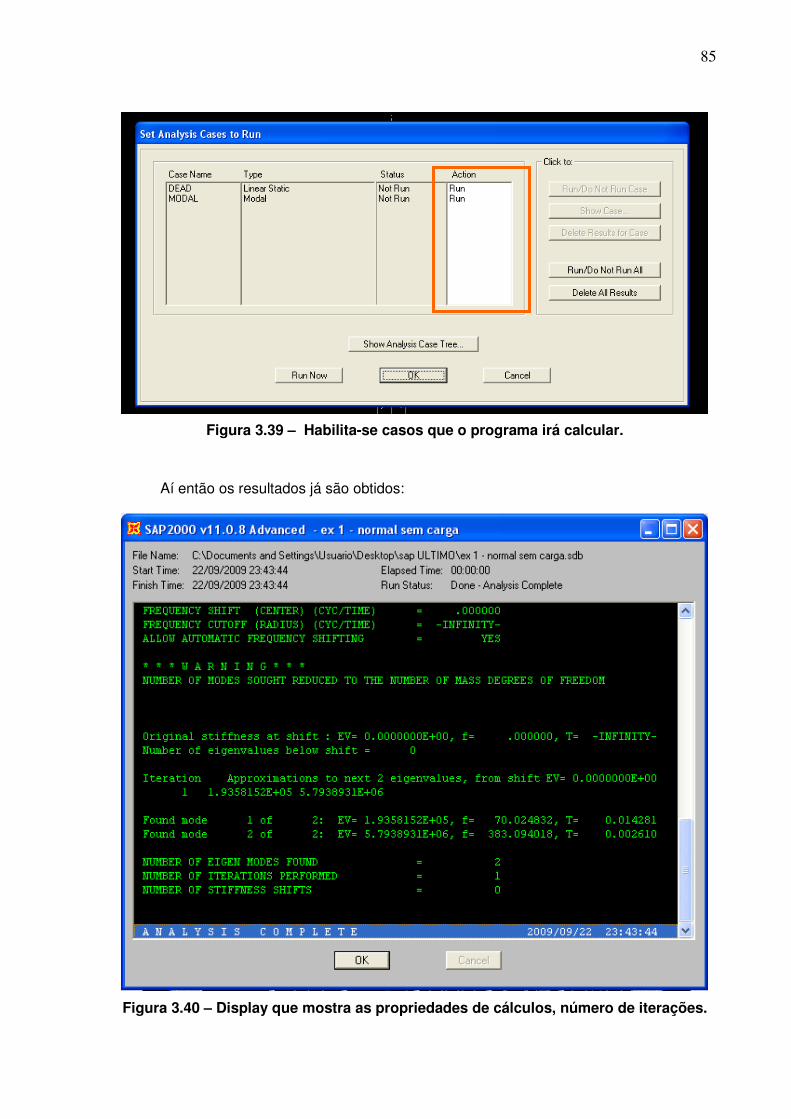
85
Figura 3.39 – Habilita-se casos que o programa irá calcular.
Aí então os resultados já são obtidos:
Figura 3.40 – Display que mostra as propriedades de cálculos, número de iterações.
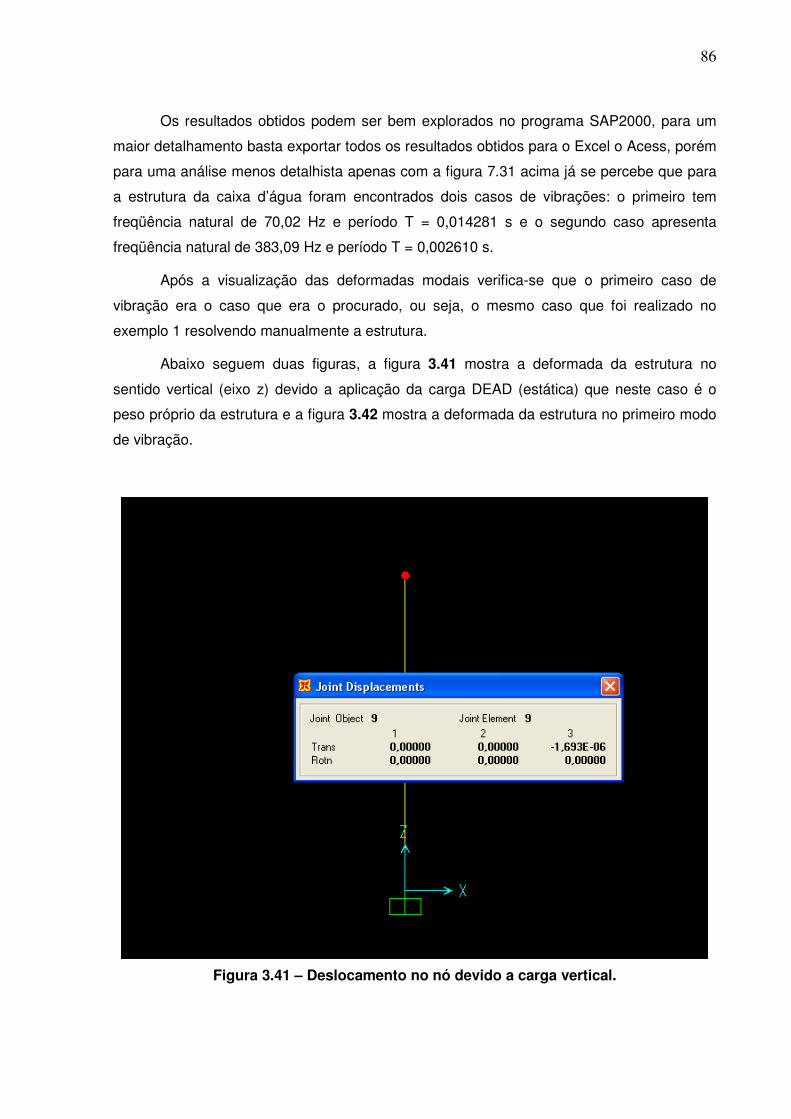
86
Os resultados obtidos podem ser bem explorados no programa SAP2000, para um
maior detalhamento basta exportar todos os resultados obtidos para o Excel o Acess, porém
para uma análise menos detalhista apenas com a figura 7.31 acima já se percebe que para
a estrutura da caixa d’água foram encontrados dois casos de vibrações: o primeiro tem
freqüência natural de 70,02 Hz e período T = 0,014281 s e o segundo caso apresenta
freqüência natural de 383,09 Hz e período T = 0,002610 s.
Após a visualização das deformadas modais verifica-se que o primeiro caso de
vibração era o caso que era o procurado, ou seja, o mesmo caso que foi realizado no
exemplo 1 resolvendo manualmente a estrutura.
Abaixo seguem duas figuras, a figura 3.41 mostra a deformada da estrutura no
sentido vertical (eixo z) devido a aplicação da carga DEAD (estática) que neste caso é o
peso próprio da estrutura e a figura 3.42 mostra a deformada da estrutura no primeiro modo
de vibração.
Figura 3.41 – Deslocamento no nó devido a carga vertical.
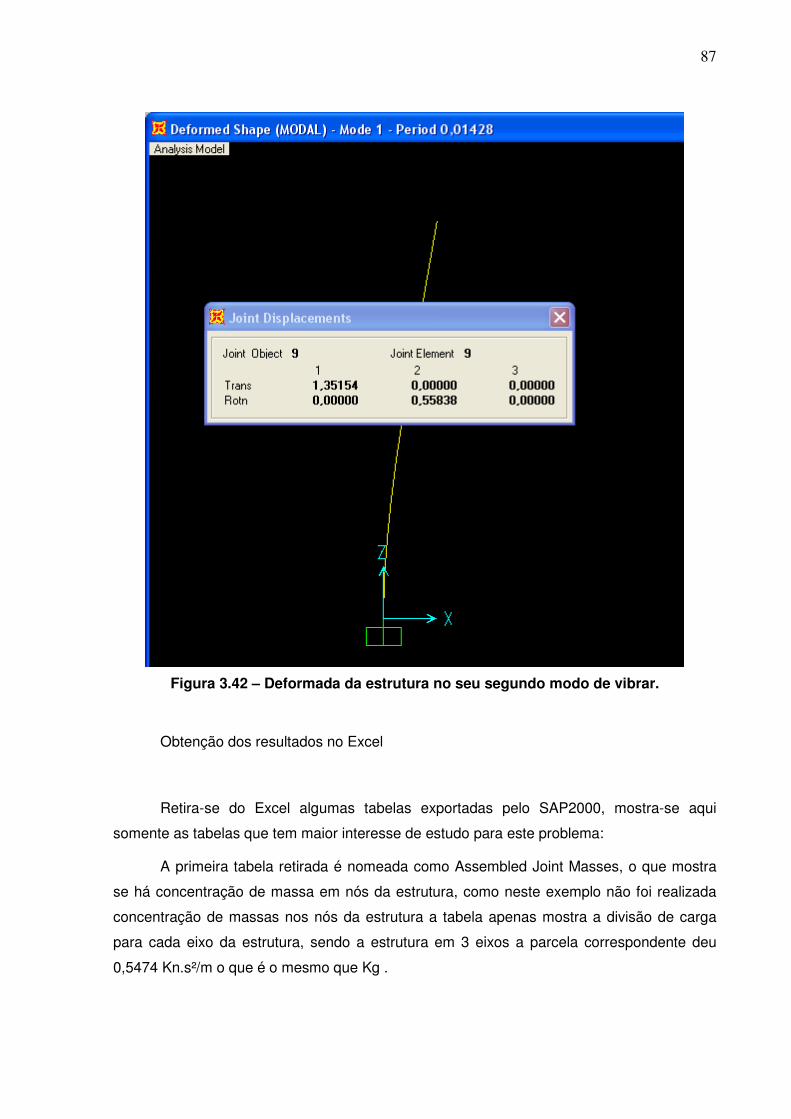
87
Figura 3.42 – Deformada da estrutura no seu segundo modo de vibrar.
Obtenção dos resultados no Excel
Retira-se do Excel algumas tabelas exportadas pelo SAP2000, mostra-se aqui
somente as tabelas que tem maior interesse de estudo para este problema:
A primeira tabela retirada é nomeada como Assembled Joint Masses, o que mostra
se há concentração de massa em nós da estrutura, como neste exemplo não foi realizada
concentração de massas nos nós da estrutura a tabela apenas mostra a divisão de carga
para cada eixo da estrutura, sendo a estrutura em 3 eixos a parcela correspondente deu
0,5474 Kn.s²/m o que é o mesmo que Kg .
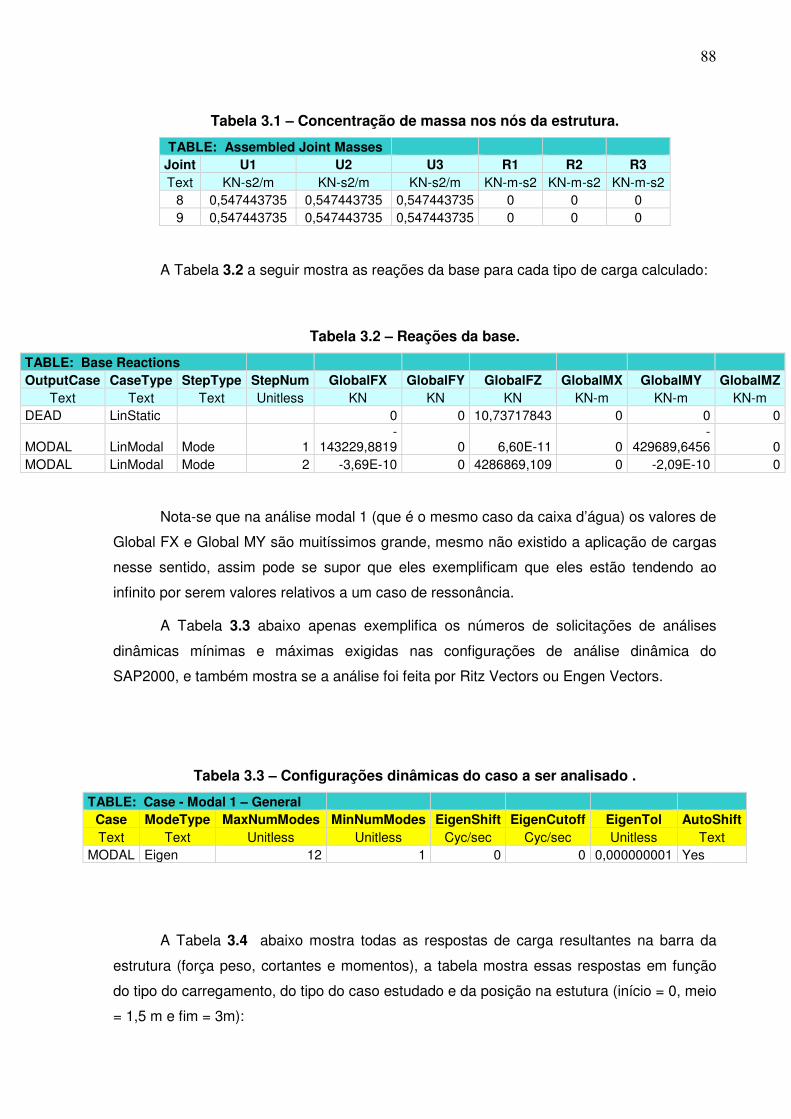
88
Tabela 3.1 – Concentração de massa nos nós da estrutura.
TABLE: Assembled Joint Masses Joint U1 U2 U3 R1 R2 R3 Text KN-s2/m KN-s2/m KN-s2/m KN-m-s2 KN-m-s2 KN-m-s2
8 0,547443735 0,547443735 0,547443735 0 0 0 9 0,547443735 0,547443735 0,547443735 0 0 0
A Tabela 3.2 a seguir mostra as reações da base para cada tipo de carga calculado:
Tabela 3.2 – Reações da base.
TABLE: Base Reactions OutputCase CaseType StepType StepNum GlobalFX GlobalFY GlobalFZ GlobalMX GlobalMY GlobalMZ
Text Text Text Unitless KN KN KN KN-m KN-m KN-m DEAD LinStatic 0 0 10,73717843 0 0 0
MODAL LinModal Mode 1 -
143229,8819 0 6,60E-11 0 -
429689,6456 0 MODAL LinModal Mode 2 -3,69E-10 0 4286869,109 0 -2,09E-10 0
Nota-se que na análise modal 1 (que é o mesmo caso da caixa d’água) os valores de
Global FX e Global MY são muitíssimos grande, mesmo não existido a aplicação de cargas
nesse sentido, assim pode se supor que eles exemplificam que eles estão tendendo ao
infinito por serem valores relativos a um caso de ressonância.
A Tabela 3.3 abaixo apenas exemplifica os números de solicitações de análises
dinâmicas mínimas e máximas exigidas nas configurações de análise dinâmica do
SAP2000, e também mostra se a análise foi feita por Ritz Vectors ou Engen Vectors.
Tabela 3.3 – Configurações dinâmicas do caso a ser analisado .
TABLE: Case - Modal 1 – General Case ModeType MaxNumModes MinNumModes EigenShift EigenCutoff EigenTol AutoShift Text Text Unitless Unitless Cyc/sec Cyc/sec Unitless Text
MODAL Eigen 12 1 0 0 0,000000001 Yes
A Tabela 3.4 abaixo mostra todas as respostas de carga resultantes na barra da
estrutura (força peso, cortantes e momentos), a tabela mostra essas respostas em função
do tipo do carregamento, do tipo do caso estudado e da posição na estutura (início = 0, meio
= 1,5 m e fim = 3m):
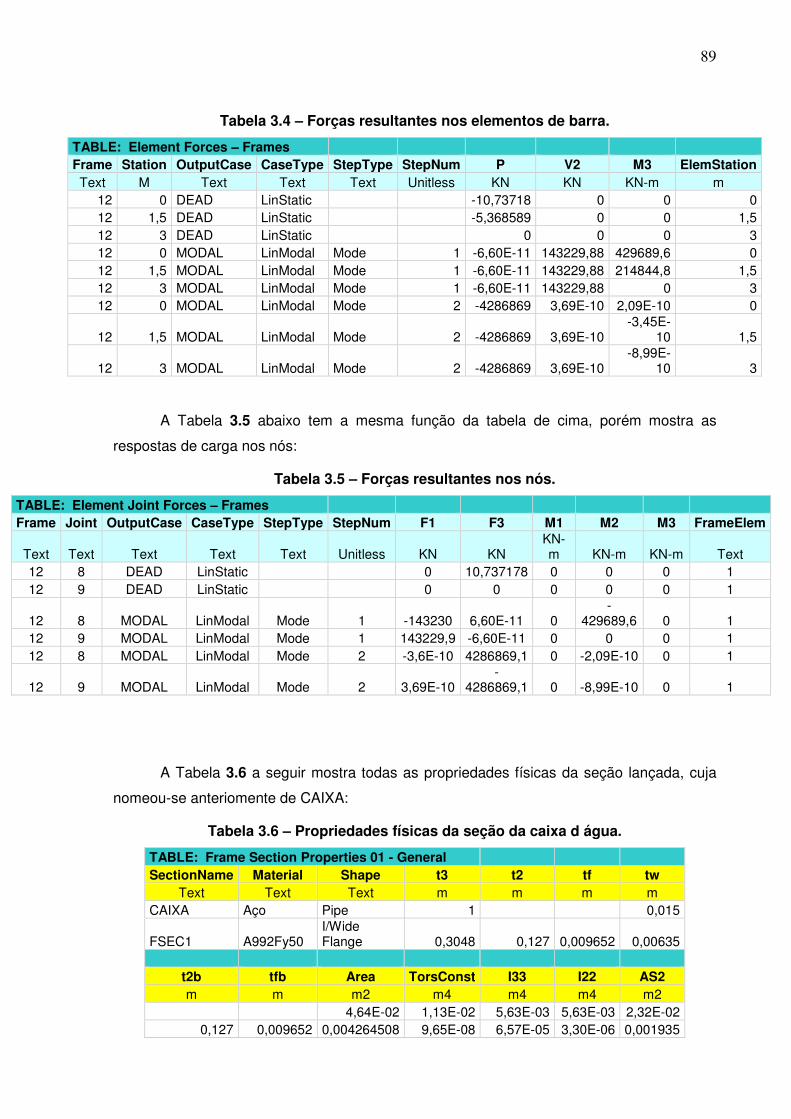
89
Tabela 3.4 – Forças resultantes nos elementos de barra.
TABLE: Element Forces – Frames Frame Station OutputCase CaseType StepType StepNum P V2 M3 ElemStation Text M Text Text Text Unitless KN KN KN-m m
12 0 DEAD LinStatic -10,73718 0 0 0 12 1,5 DEAD LinStatic -5,368589 0 0 1,5 12 3 DEAD LinStatic 0 0 0 3 12 0 MODAL LinModal Mode 1 -6,60E-11 143229,88 429689,6 0 12 1,5 MODAL LinModal Mode 1 -6,60E-11 143229,88 214844,8 1,5 12 3 MODAL LinModal Mode 1 -6,60E-11 143229,88 0 3 12 0 MODAL LinModal Mode 2 -4286869 3,69E-10 2,09E-10 0
12 1,5 MODAL LinModal Mode 2 -4286869 3,69E-10 -3,45E-
10 1,5
12 3 MODAL LinModal Mode 2 -4286869 3,69E-10 -8,99E-
10 3
A Tabela 3.5 abaixo tem a mesma função da tabela de cima, porém mostra as
respostas de carga nos nós:
Tabela 3.5 – Forças resultantes nos nós.
TABLE: Element Joint Forces – Frames Frame Joint OutputCase CaseType StepType StepNum F1 F3 M1 M2 M3 FrameElem
Text Text Text Text Text Unitless KN KN KN-m KN-m KN-m Text
12 8 DEAD LinStatic 0 10,737178 0 0 0 1 12 9 DEAD LinStatic 0 0 0 0 0 1
12 8 MODAL LinModal Mode 1 -143230 6,60E-11 0 -
429689,6 0 1 12 9 MODAL LinModal Mode 1 143229,9 -6,60E-11 0 0 0 1 12 8 MODAL LinModal Mode 2 -3,6E-10 4286869,1 0 -2,09E-10 0 1
12 9 MODAL LinModal Mode 2 3,69E-10 -
4286869,1 0 -8,99E-10 0 1
A Tabela 3.6 a seguir mostra todas as propriedades físicas da seção lançada, cuja
nomeou-se anteriomente de CAIXA:
Tabela 3.6 – Propriedades físicas da seção da caixa d água.
TABLE: Frame Section Properties 01 - General SectionName Material Shape t3 t2 tf tw
Text Text Text m m m m CAIXA Aço Pipe 1 0,015
FSEC1 A992Fy50 I/Wide Flange 0,3048 0,127 0,009652 0,00635
t2b tfb Area TorsConst I33 I22 AS2 m m m2 m4 m4 m4 m2
4,64E-02 1,13E-02 5,63E-03 5,63E-03 2,32E-02 0,127 0,009652 0,004264508 9,65E-08 6,57E-05 3,30E-06 0,001935
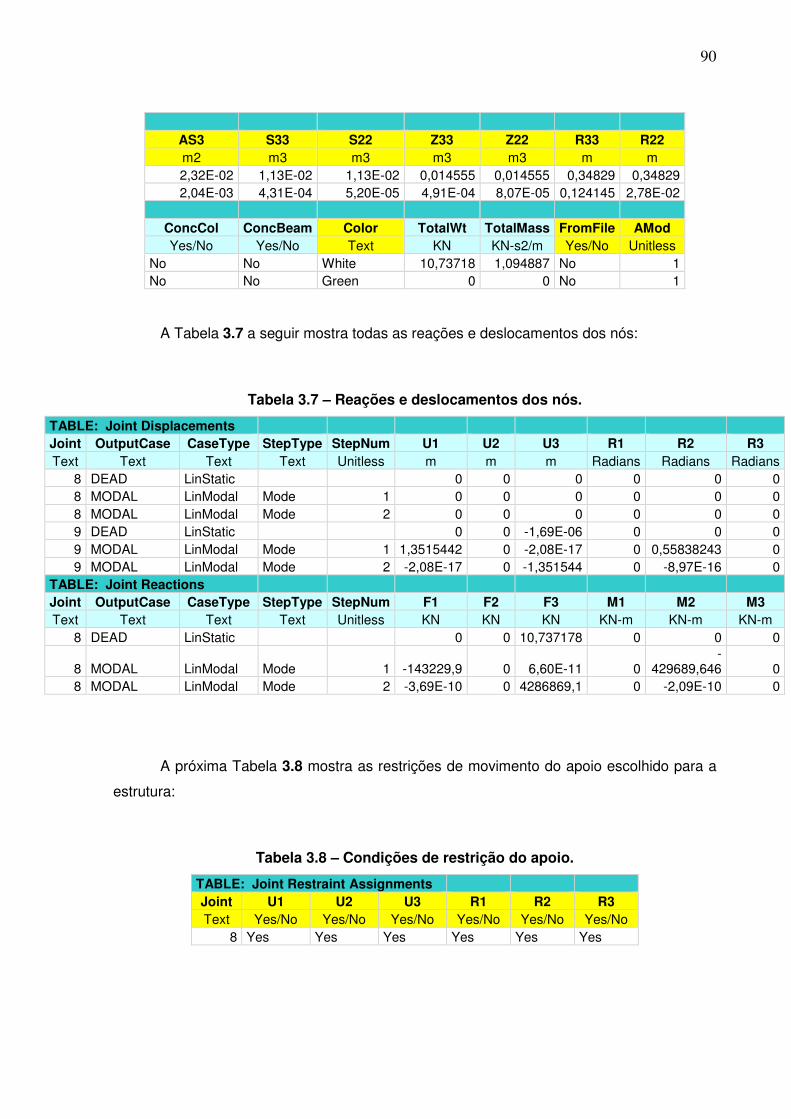
90
AS3 S33 S22 Z33 Z22 R33 R22 m2 m3 m3 m3 m3 m m 2,32E-02 1,13E-02 1,13E-02 0,014555 0,014555 0,34829 0,34829 2,04E-03 4,31E-04 5,20E-05 4,91E-04 8,07E-05 0,124145 2,78E-02
ConcCol ConcBeam Color TotalWt TotalMass FromFile AMod Yes/No Yes/No Text KN KN-s2/m Yes/No Unitless
No No White 10,73718 1,094887 No 1 No No Green 0 0 No 1
A Tabela 3.7 a seguir mostra todas as reações e deslocamentos dos nós:
Tabela 3.7 – Reações e deslocamentos dos nós.
TABLE: Joint Displacements Joint OutputCase CaseType StepType StepNum U1 U2 U3 R1 R2 R3 Text Text Text Text Unitless m m m Radians Radians Radians
8 DEAD LinStatic 0 0 0 0 0 0 8 MODAL LinModal Mode 1 0 0 0 0 0 0 8 MODAL LinModal Mode 2 0 0 0 0 0 0 9 DEAD LinStatic 0 0 -1,69E-06 0 0 0 9 MODAL LinModal Mode 1 1,3515442 0 -2,08E-17 0 0,55838243 0 9 MODAL LinModal Mode 2 -2,08E-17 0 -1,351544 0 -8,97E-16 0
TABLE: Joint Reactions Joint OutputCase CaseType StepType StepNum F1 F2 F3 M1 M2 M3 Text Text Text Text Unitless KN KN KN KN-m KN-m KN-m
8 DEAD LinStatic 0 0 10,737178 0 0 0
8 MODAL LinModal Mode 1 -143229,9 0 6,60E-11 0 -
429689,646 0 8 MODAL LinModal Mode 2 -3,69E-10 0 4286869,1 0 -2,09E-10 0
A próxima Tabela 3.8 mostra as restrições de movimento do apoio escolhido para a
estrutura:
Tabela 3.8 – Condições de restrição do apoio.
TABLE: Joint Restraint Assignments Joint U1 U2 U3 R1 R2 R3 Text Yes/No Yes/No Yes/No Yes/No Yes/No Yes/No
8 Yes Yes Yes Yes Yes Yes
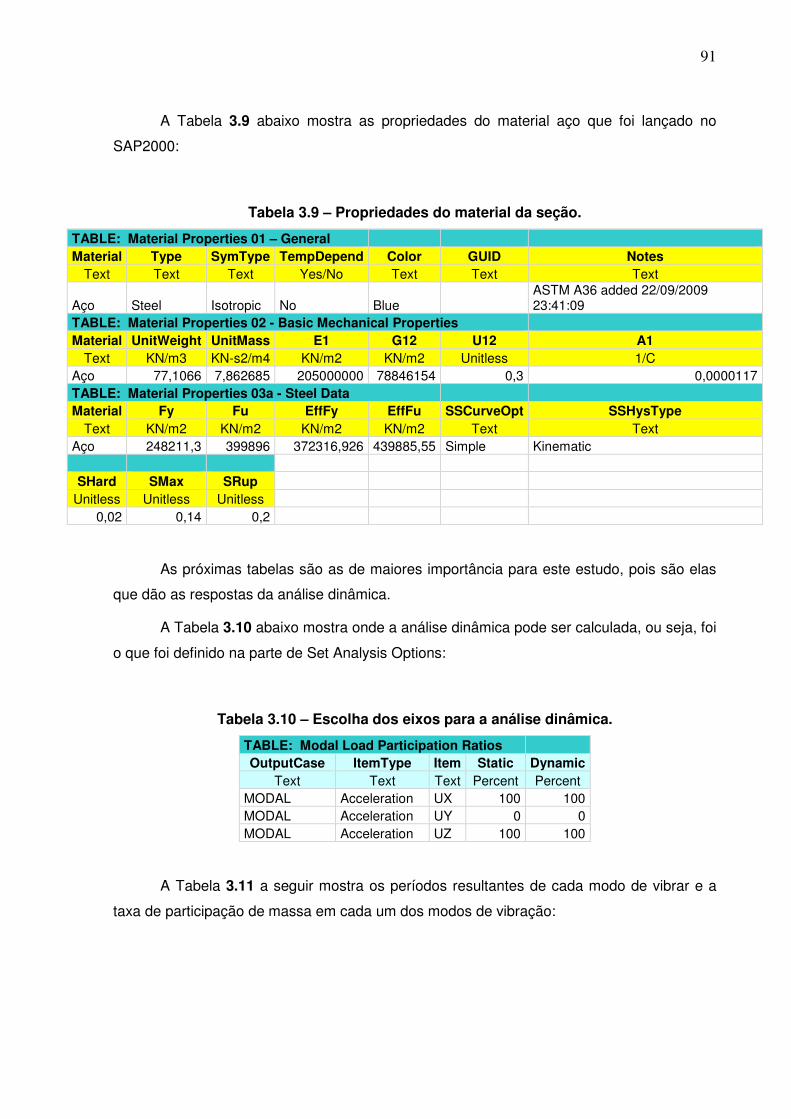
91
A Tabela 3.9 abaixo mostra as propriedades do material aço que foi lançado no
SAP2000:
Tabela 3.9 – Propriedades do material da seção.
TABLE: Material Properties 01 – General Material Type SymType TempDepend Color GUID Notes
Text Text Text Yes/No Text Text Text
Aço Steel Isotropic No Blue ASTM A36 added 22/09/2009 23:41:09
TABLE: Material Properties 02 - Basic Mechanical Properties Material UnitWeight UnitMass E1 G12 U12 A1
Text KN/m3 KN-s2/m4 KN/m2 KN/m2 Unitless 1/C Aço 77,1066 7,862685 205000000 78846154 0,3 0,0000117 TABLE: Material Properties 03a - Steel Data Material Fy Fu EffFy EffFu SSCurveOpt SSHysType
Text KN/m2 KN/m2 KN/m2 KN/m2 Text Text Aço 248211,3 399896 372316,926 439885,55 Simple Kinematic SHard SMax SRup
Unitless Unitless Unitless 0,02 0,14 0,2
As próximas tabelas são as de maiores importância para este estudo, pois são elas
que dão as respostas da análise dinâmica.
A Tabela 3.10 abaixo mostra onde a análise dinâmica pode ser calculada, ou seja, foi
o que foi definido na parte de Set Analysis Options:
Tabela 3.10 – Escolha dos eixos para a análise dinâmica.
TABLE: Modal Load Participation Ratios OutputCase ItemType Item Static Dynamic
Text Text Text Percent Percent MODAL Acceleration UX 100 100 MODAL Acceleration UY 0 0 MODAL Acceleration UZ 100 100
A Tabela 3.11 a seguir mostra os períodos resultantes de cada modo de vibrar e a
taxa de participação de massa em cada um dos modos de vibração:
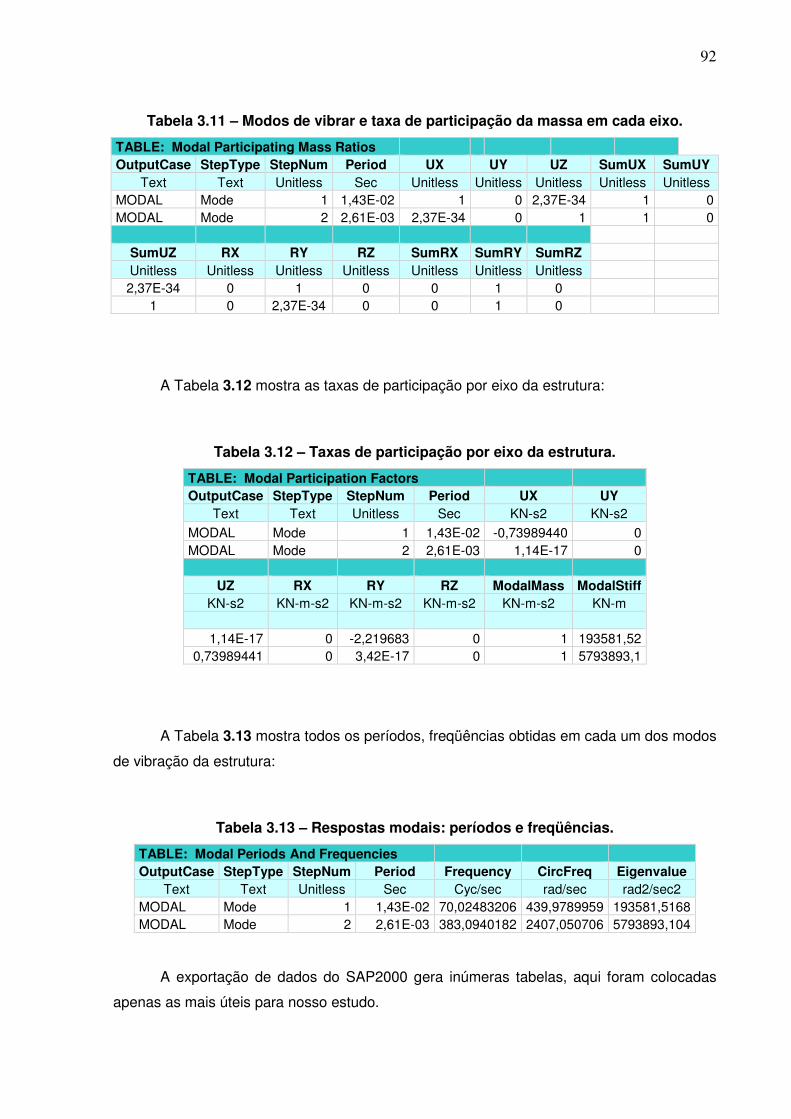
92
Tabela 3.11 – Modos de vibrar e taxa de participação da massa em cada eixo.
TABLE: Modal Participating Mass Ratios OutputCase StepType StepNum Period UX UY UZ SumUX SumUY
Text Text Unitless Sec Unitless Unitless Unitless Unitless Unitless MODAL Mode 1 1,43E-02 1 0 2,37E-34 1 0 MODAL Mode 2 2,61E-03 2,37E-34 0 1 1 0
SumUZ RX RY RZ SumRX SumRY SumRZ Unitless Unitless Unitless Unitless Unitless Unitless Unitless 2,37E-34 0 1 0 0 1 0
1 0 2,37E-34 0 0 1 0
A Tabela 3.12 mostra as taxas de participação por eixo da estrutura:
Tabela 3.12 – Taxas de participação por eixo da estrutura.
TABLE: Modal Participation Factors OutputCase StepType StepNum Period UX UY
Text Text Unitless Sec KN-s2 KN-s2 MODAL Mode 1 1,43E-02 -0,73989440 0 MODAL Mode 2 2,61E-03 1,14E-17 0
UZ RX RY RZ ModalMass ModalStiff KN-s2 KN-m-s2 KN-m-s2 KN-m-s2 KN-m-s2 KN-m
1,14E-17 0 -2,219683 0 1 193581,52
0,73989441 0 3,42E-17 0 1 5793893,1
A Tabela 3.13 mostra todos os períodos, freqüências obtidas em cada um dos modos
de vibração da estrutura:
Tabela 3.13 – Respostas modais: períodos e freqüências.
TABLE: Modal Periods And Frequencies OutputCase StepType StepNum Period Frequency CircFreq Eigenvalue
Text Text Unitless Sec Cyc/sec rad/sec rad2/sec2 MODAL Mode 1 1,43E-02 70,02483206 439,9789959 193581,5168 MODAL Mode 2 2,61E-03 383,0940182 2407,050706 5793893,104
A exportação de dados do SAP2000 gera inúmeras tabelas, aqui foram colocadas
apenas as mais úteis para nosso estudo.
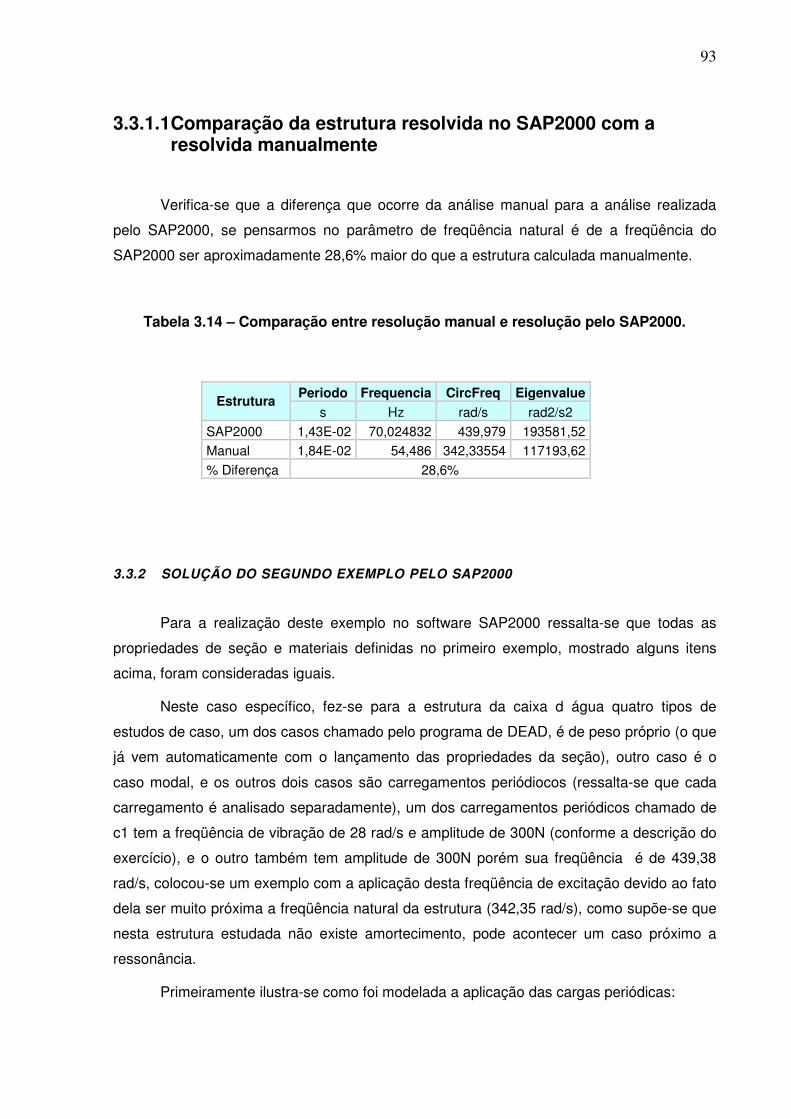
93
3.3.1.1 Comparação da estrutura resolvida no SAP2000 com a resolvida manualmente
Verifica-se que a diferença que ocorre da análise manual para a análise realizada
pelo SAP2000, se pensarmos no parâmetro de freqüência natural é de a freqüência do
SAP2000 ser aproximadamente 28,6% maior do que a estrutura calculada manualmente.
Tabela 3.14 – Comparação entre resolução manual e resolução pelo SAP2000.
3.3.2 SOLUÇÃO DO SEGUNDO EXEMPLO PELO SAP2000
Para a realização deste exemplo no software SAP2000 ressalta-se que todas as
propriedades de seção e materiais definidas no primeiro exemplo, mostrado alguns itens
acima, foram consideradas iguais.
Neste caso específico, fez-se para a estrutura da caixa d água quatro tipos de
estudos de caso, um dos casos chamado pelo programa de DEAD, é de peso próprio (o que
já vem automaticamente com o lançamento das propriedades da seção), outro caso é o
caso modal, e os outros dois casos são carregamentos periódiocos (ressalta-se que cada
carregamento é analisado separadamente), um dos carregamentos periódicos chamado de
c1 tem a freqüência de vibração de 28 rad/s e amplitude de 300N (conforme a descrição do
exercício), e o outro também tem amplitude de 300N porém sua freqüência é de 439,38
rad/s, colocou-se um exemplo com a aplicação desta freqüência de excitação devido ao fato
dela ser muito próxima a freqüência natural da estrutura (342,35 rad/s), como supõe-se que
nesta estrutura estudada não existe amortecimento, pode acontecer um caso próximo a
ressonância.
Primeiramente ilustra-se como foi modelada a aplicação das cargas periódicas:
Estrutura Periodo Frequencia CircFreq Eigenvalue
s Hz rad/s rad2/s2
SAP2000 1,43E-02 70,024832 439,979 193581,52 Manual 1,84E-02 54,486 342,33554 117193,62
% Diferença 28,6%
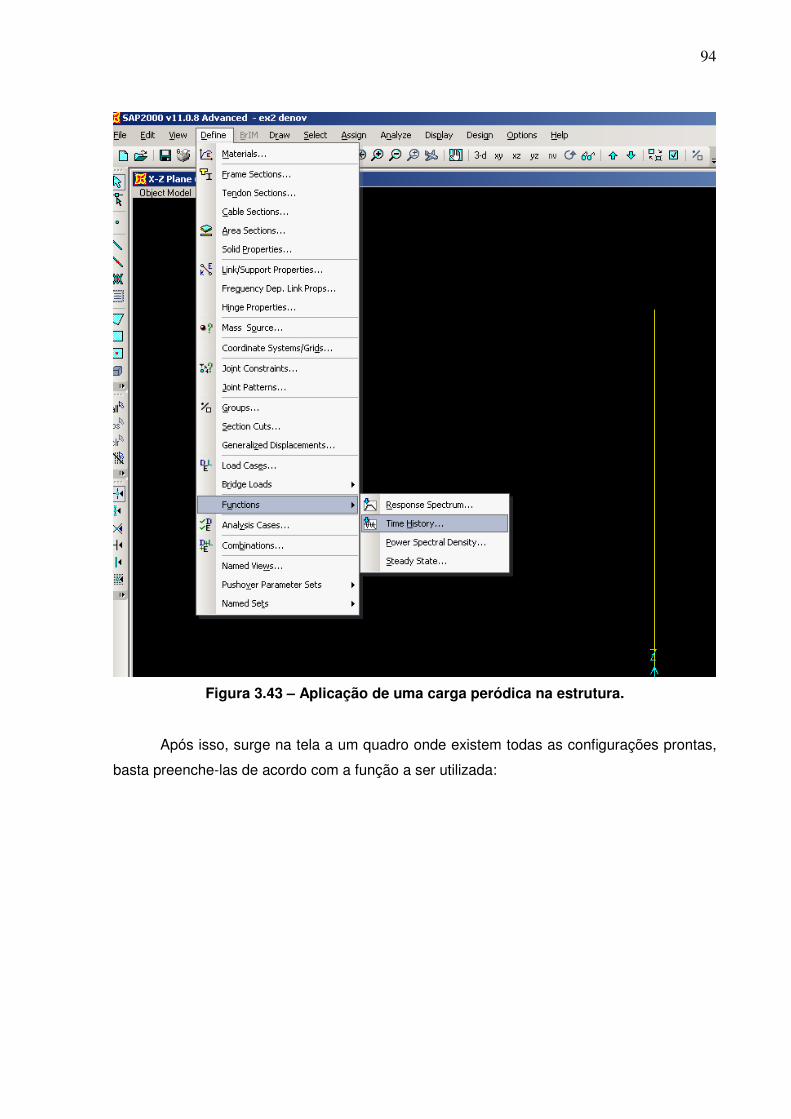
94
Figura 3.43 – Aplicação de uma carga peródica na estrutura.
Após isso, surge na tela a um quadro onde existem todas as configurações prontas,
basta preenche-las de acordo com a função a ser utilizada:
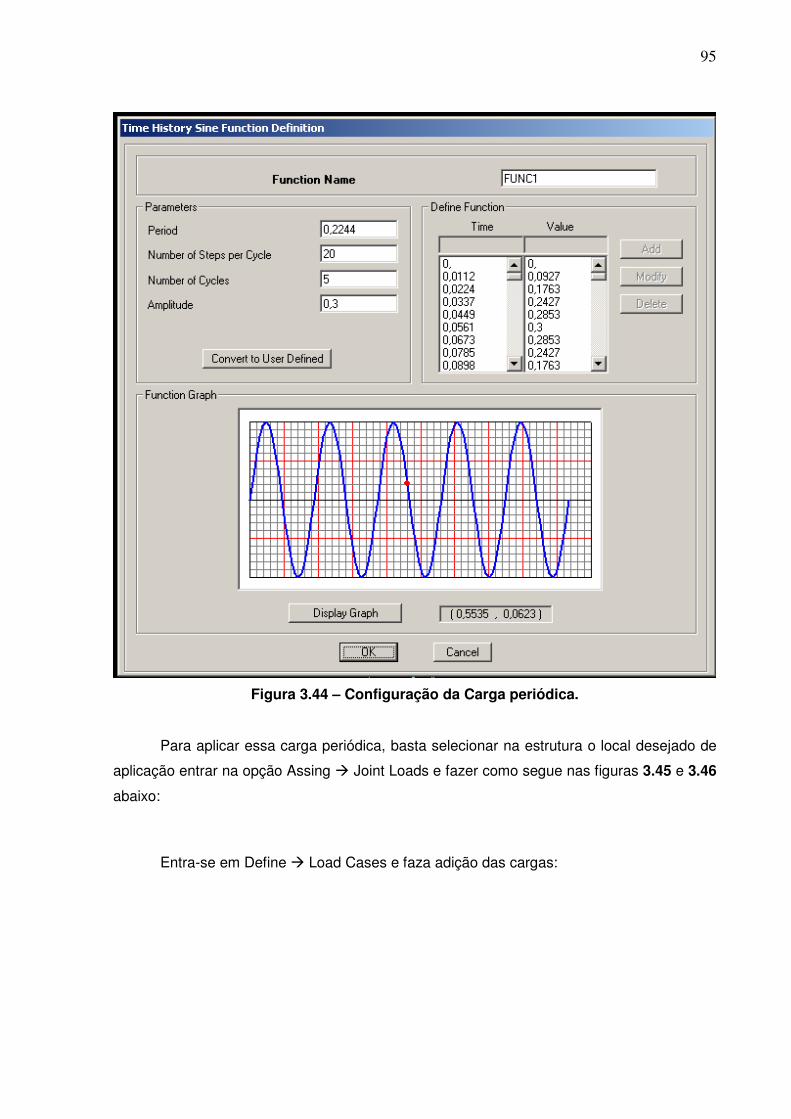
95
Figura 3.44 – Configuração da Carga periódica.
Para aplicar essa carga periódica, basta selecionar na estrutura o local desejado de
aplicação entrar na opção Assing Joint Loads e fazer como segue nas figuras 3.45 e 3.46
abaixo:
Entra-se em Define Load Cases e faza adição das cargas:
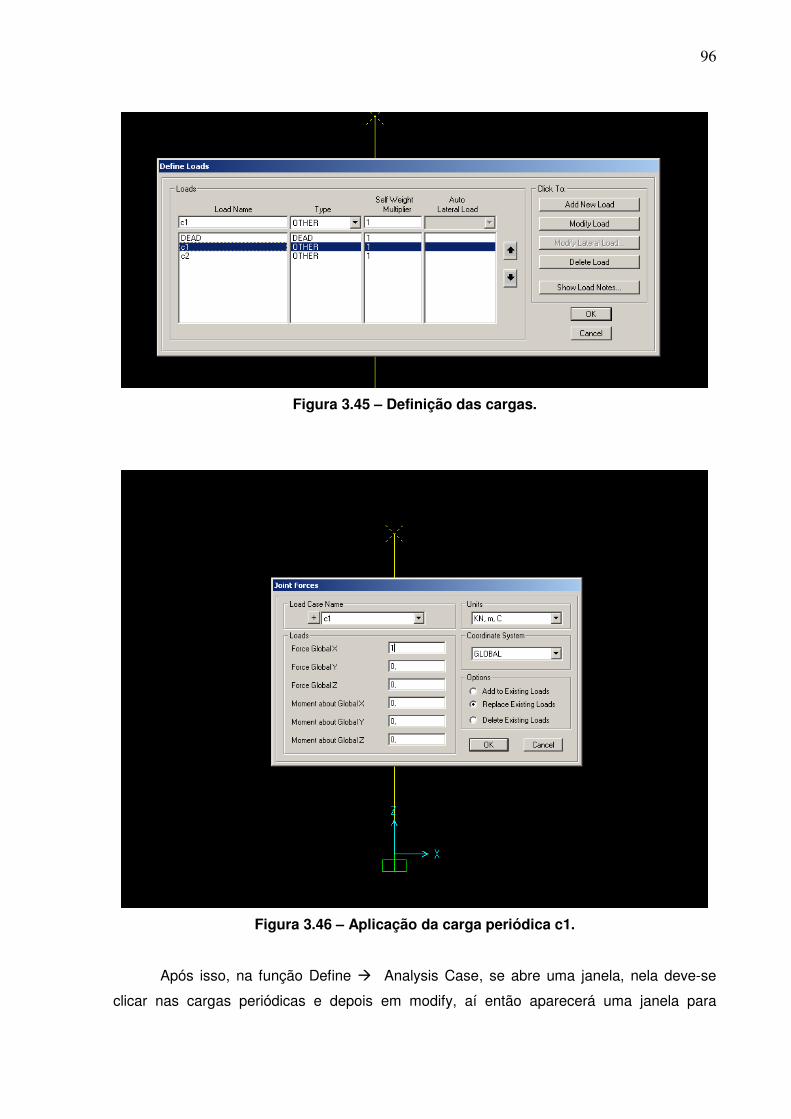
96
Figura 3.45 – Definição das cargas.
Figura 3.46 – Aplicação da carga periódica c1.
Após isso, na função Define Analysis Case, se abre uma janela, nela deve-se
clicar nas cargas periódicas e depois em modify, aí então aparecerá uma janela para
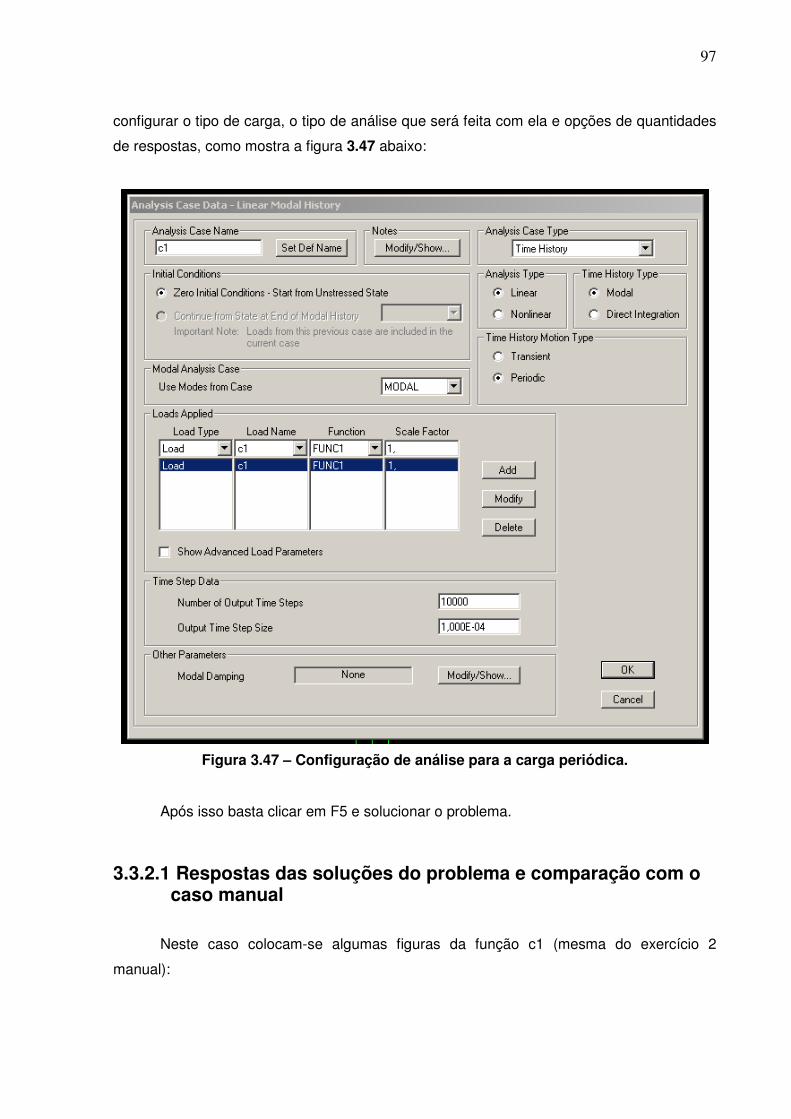
97
configurar o tipo de carga, o tipo de análise que será feita com ela e opções de quantidades
de respostas, como mostra a figura 3.47 abaixo:
Figura 3.47 – Configuração de análise para a carga periódica.
Após isso basta clicar em F5 e solucionar o problema.
3.3.2.1 Respostas das soluções do problema e comparação com o caso manual
Neste caso colocam-se algumas figuras da função c1 (mesma do exercício 2
manual):
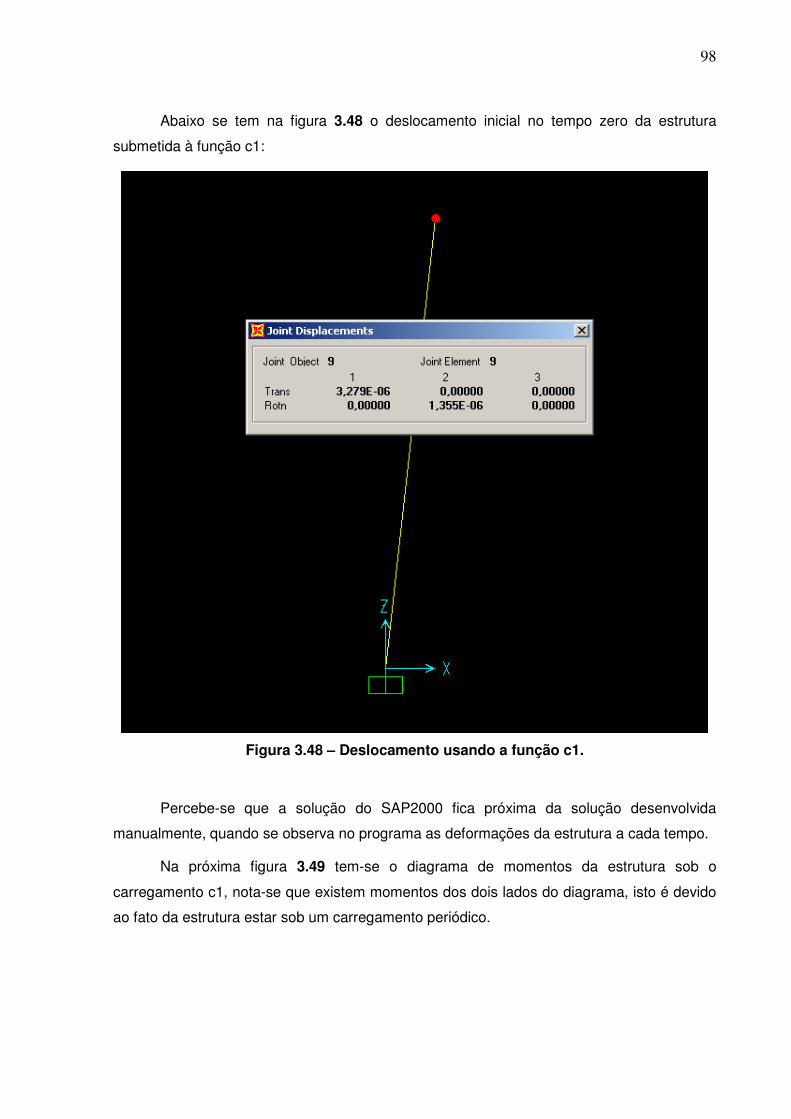
98
Abaixo se tem na figura 3.48 o deslocamento inicial no tempo zero da estrutura
submetida à função c1:
Figura 3.48 – Deslocamento usando a função c1.
Percebe-se que a solução do SAP2000 fica próxima da solução desenvolvida
manualmente, quando se observa no programa as deformações da estrutura a cada tempo.
Na próxima figura 3.49 tem-se o diagrama de momentos da estrutura sob o
carregamento c1, nota-se que existem momentos dos dois lados do diagrama, isto é devido
ao fato da estrutura estar sob um carregamento periódico.
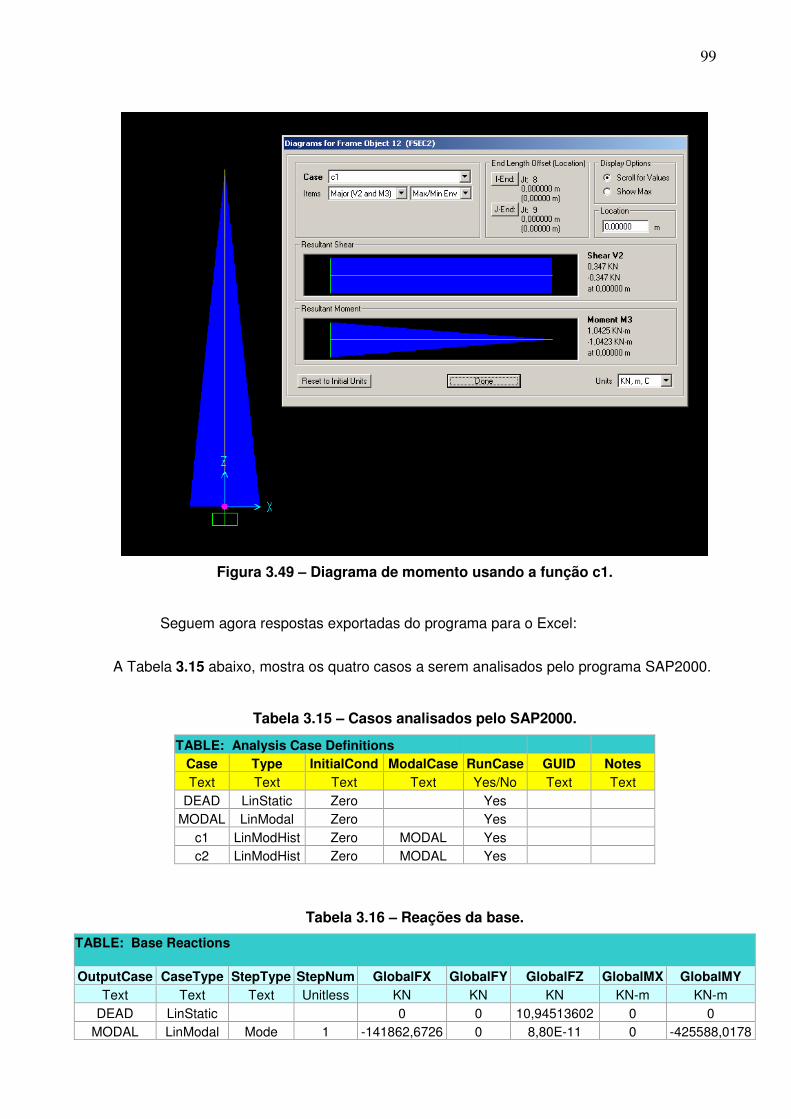
99
Figura 3.49 – Diagrama de momento usando a função c1.
Seguem agora respostas exportadas do programa para o Excel:
A Tabela 3.15 abaixo, mostra os quatro casos a serem analisados pelo programa SAP2000.
Tabela 3.15 – Casos analisados pelo SAP2000.
TABLE: Analysis Case Definitions Case Type InitialCond ModalCase RunCase GUID Notes Text Text Text Text Yes/No Text Text
DEAD LinStatic Zero Yes MODAL LinModal Zero Yes
c1 LinModHist Zero MODAL Yes c2 LinModHist Zero MODAL Yes
Tabela 3.16 – Reações da base.
TABLE: Base Reactions OutputCase CaseType StepType StepNum GlobalFX GlobalFY GlobalFZ GlobalMX GlobalMY
Text Text Text Unitless KN KN KN KN-m KN-m DEAD LinStatic 0 0 10,94513602 0 0
MODAL LinModal Mode 1 -141862,6726 0 8,80E-11 0 -425588,0178
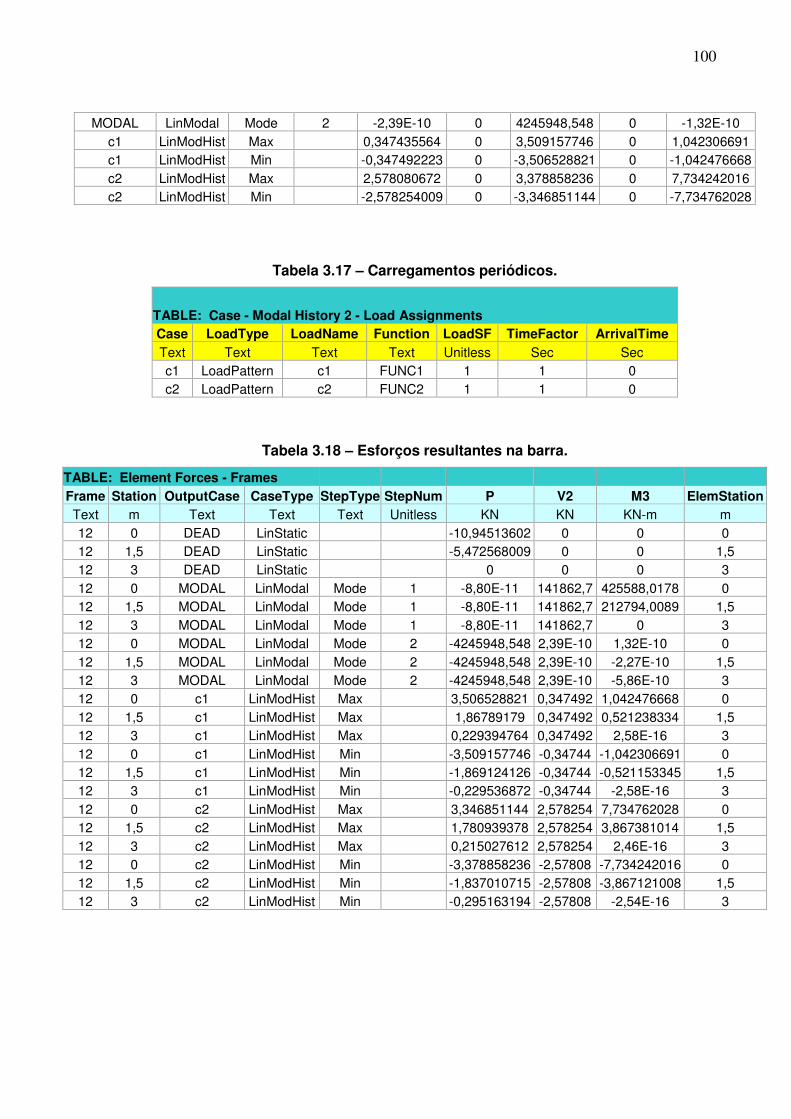
100
MODAL LinModal Mode 2 -2,39E-10 0 4245948,548 0 -1,32E-10 c1 LinModHist Max 0,347435564 0 3,509157746 0 1,042306691 c1 LinModHist Min -0,347492223 0 -3,506528821 0 -1,042476668 c2 LinModHist Max 2,578080672 0 3,378858236 0 7,734242016 c2 LinModHist Min -2,578254009 0 -3,346851144 0 -7,734762028
Tabela 3.17 – Carregamentos periódicos.
TABLE: Case - Modal History 2 - Load Assignments Case LoadType LoadName Function LoadSF TimeFactor ArrivalTime Text Text Text Text Unitless Sec Sec c1 LoadPattern c1 FUNC1 1 1 0 c2 LoadPattern c2 FUNC2 1 1 0
Tabela 3.18 – Esforços resultantes na barra.
TABLE: Element Forces - Frames Frame Station OutputCase CaseType StepType StepNum P V2 M3 ElemStation Text m Text Text Text Unitless KN KN KN-m m 12 0 DEAD LinStatic -10,94513602 0 0 0 12 1,5 DEAD LinStatic -5,472568009 0 0 1,5 12 3 DEAD LinStatic 0 0 0 3 12 0 MODAL LinModal Mode 1 -8,80E-11 141862,7 425588,0178 0 12 1,5 MODAL LinModal Mode 1 -8,80E-11 141862,7 212794,0089 1,5 12 3 MODAL LinModal Mode 1 -8,80E-11 141862,7 0 3 12 0 MODAL LinModal Mode 2 -4245948,548 2,39E-10 1,32E-10 0 12 1,5 MODAL LinModal Mode 2 -4245948,548 2,39E-10 -2,27E-10 1,5 12 3 MODAL LinModal Mode 2 -4245948,548 2,39E-10 -5,86E-10 3 12 0 c1 LinModHist Max 3,506528821 0,347492 1,042476668 0 12 1,5 c1 LinModHist Max 1,86789179 0,347492 0,521238334 1,5 12 3 c1 LinModHist Max 0,229394764 0,347492 2,58E-16 3 12 0 c1 LinModHist Min -3,509157746 -0,34744 -1,042306691 0 12 1,5 c1 LinModHist Min -1,869124126 -0,34744 -0,521153345 1,5 12 3 c1 LinModHist Min -0,229536872 -0,34744 -2,58E-16 3 12 0 c2 LinModHist Max 3,346851144 2,578254 7,734762028 0 12 1,5 c2 LinModHist Max 1,780939378 2,578254 3,867381014 1,5 12 3 c2 LinModHist Max 0,215027612 2,578254 2,46E-16 3 12 0 c2 LinModHist Min -3,378858236 -2,57808 -7,734242016 0 12 1,5 c2 LinModHist Min -1,837010715 -2,57808 -3,867121008 1,5 12 3 c2 LinModHist Min -0,295163194 -2,57808 -2,54E-16 3
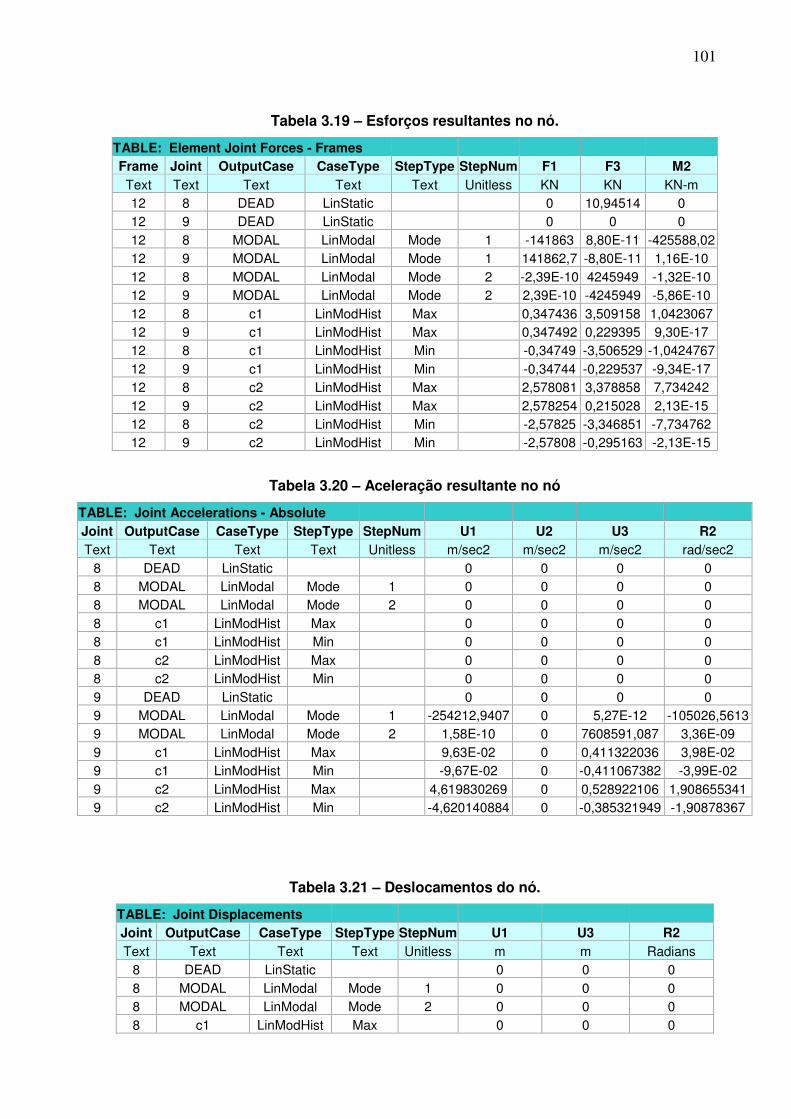
101
Tabela 3.19 – Esforços resultantes no nó.
TABLE: Element Joint Forces - Frames Frame Joint OutputCase CaseType StepType StepNum F1 F3 M2 Text Text Text Text Text Unitless KN KN KN-m 12 8 DEAD LinStatic 0 10,94514 0 12 9 DEAD LinStatic 0 0 0 12 8 MODAL LinModal Mode 1 -141863 8,80E-11 -425588,02 12 9 MODAL LinModal Mode 1 141862,7 -8,80E-11 1,16E-10 12 8 MODAL LinModal Mode 2 -2,39E-10 4245949 -1,32E-10 12 9 MODAL LinModal Mode 2 2,39E-10 -4245949 -5,86E-10 12 8 c1 LinModHist Max 0,347436 3,509158 1,0423067 12 9 c1 LinModHist Max 0,347492 0,229395 9,30E-17 12 8 c1 LinModHist Min -0,34749 -3,506529 -1,0424767 12 9 c1 LinModHist Min -0,34744 -0,229537 -9,34E-17 12 8 c2 LinModHist Max 2,578081 3,378858 7,734242 12 9 c2 LinModHist Max 2,578254 0,215028 2,13E-15 12 8 c2 LinModHist Min -2,57825 -3,346851 -7,734762 12 9 c2 LinModHist Min -2,57808 -0,295163 -2,13E-15
Tabela 3.20 – Aceleração resultante no nó
TABLE: Joint Accelerations - Absolute Joint OutputCase CaseType StepType StepNum U1 U2 U3 R2 Text Text Text Text Unitless m/sec2 m/sec2 m/sec2 rad/sec2
8 DEAD LinStatic 0 0 0 0 8 MODAL LinModal Mode 1 0 0 0 0 8 MODAL LinModal Mode 2 0 0 0 0 8 c1 LinModHist Max 0 0 0 0 8 c1 LinModHist Min 0 0 0 0 8 c2 LinModHist Max 0 0 0 0 8 c2 LinModHist Min 0 0 0 0 9 DEAD LinStatic 0 0 0 0 9 MODAL LinModal Mode 1 -254212,9407 0 5,27E-12 -105026,5613 9 MODAL LinModal Mode 2 1,58E-10 0 7608591,087 3,36E-09 9 c1 LinModHist Max 9,63E-02 0 0,411322036 3,98E-02 9 c1 LinModHist Min -9,67E-02 0 -0,411067382 -3,99E-02 9 c2 LinModHist Max 4,619830269 0 0,528922106 1,908655341 9 c2 LinModHist Min -4,620140884 0 -0,385321949 -1,90878367
Tabela 3.21 – Deslocamentos do nó.
TABLE: Joint Displacements Joint OutputCase CaseType StepType StepNum U1 U3 R2 Text Text Text Text Unitless m m Radians
8 DEAD LinStatic 0 0 0 8 MODAL LinModal Mode 1 0 0 0 8 MODAL LinModal Mode 2 0 0 0 8 c1 LinModHist Max 0 0 0
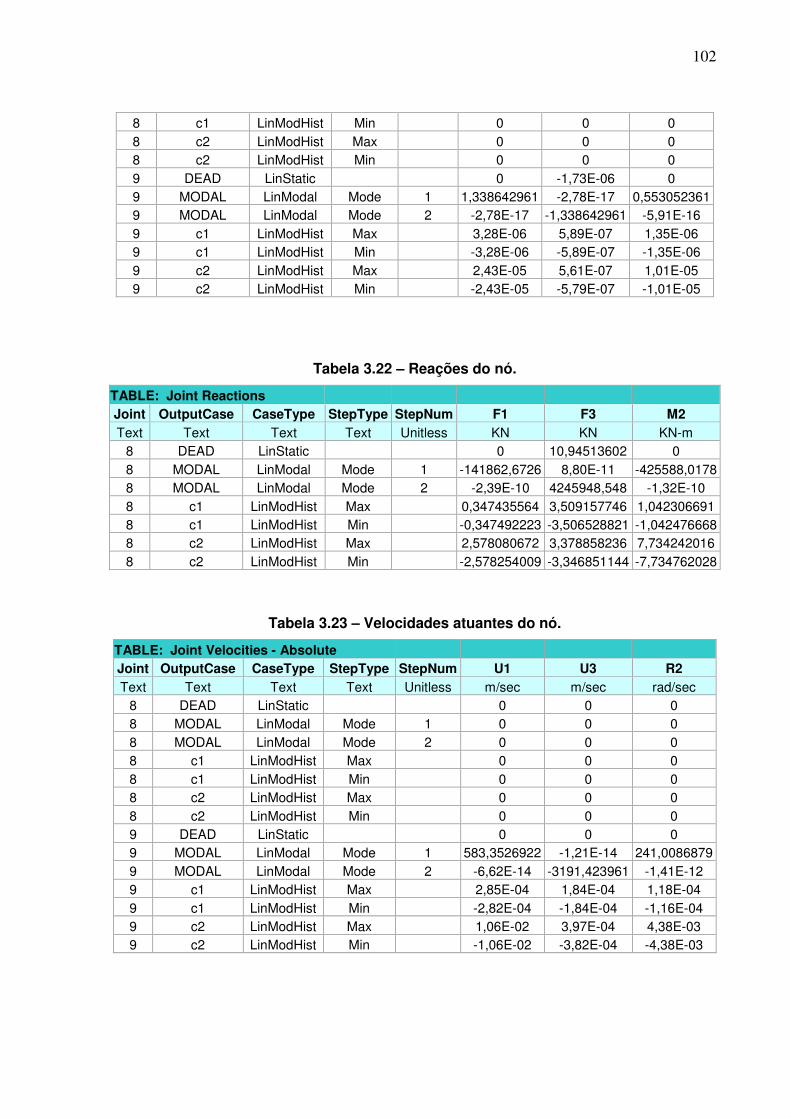
102
8 c1 LinModHist Min 0 0 0 8 c2 LinModHist Max 0 0 0 8 c2 LinModHist Min 0 0 0 9 DEAD LinStatic 0 -1,73E-06 0 9 MODAL LinModal Mode 1 1,338642961 -2,78E-17 0,553052361 9 MODAL LinModal Mode 2 -2,78E-17 -1,338642961 -5,91E-16 9 c1 LinModHist Max 3,28E-06 5,89E-07 1,35E-06 9 c1 LinModHist Min -3,28E-06 -5,89E-07 -1,35E-06 9 c2 LinModHist Max 2,43E-05 5,61E-07 1,01E-05 9 c2 LinModHist Min -2,43E-05 -5,79E-07 -1,01E-05
Tabela 3.22 – Reações do nó.
TABLE: Joint Reactions Joint OutputCase CaseType StepType StepNum F1 F3 M2 Text Text Text Text Unitless KN KN KN-m
8 DEAD LinStatic 0 10,94513602 0 8 MODAL LinModal Mode 1 -141862,6726 8,80E-11 -425588,0178 8 MODAL LinModal Mode 2 -2,39E-10 4245948,548 -1,32E-10 8 c1 LinModHist Max 0,347435564 3,509157746 1,042306691 8 c1 LinModHist Min -0,347492223 -3,506528821 -1,042476668 8 c2 LinModHist Max 2,578080672 3,378858236 7,734242016 8 c2 LinModHist Min -2,578254009 -3,346851144 -7,734762028
Tabela 3.23 – Velocidades atuantes do nó.
TABLE: Joint Velocities - Absolute Joint OutputCase CaseType StepType StepNum U1 U3 R2 Text Text Text Text Unitless m/sec m/sec rad/sec
8 DEAD LinStatic 0 0 0 8 MODAL LinModal Mode 1 0 0 0 8 MODAL LinModal Mode 2 0 0 0 8 c1 LinModHist Max 0 0 0 8 c1 LinModHist Min 0 0 0 8 c2 LinModHist Max 0 0 0 8 c2 LinModHist Min 0 0 0 9 DEAD LinStatic 0 0 0 9 MODAL LinModal Mode 1 583,3526922 -1,21E-14 241,0086879 9 MODAL LinModal Mode 2 -6,62E-14 -3191,423961 -1,41E-12 9 c1 LinModHist Max 2,85E-04 1,84E-04 1,18E-04 9 c1 LinModHist Min -2,82E-04 -1,84E-04 -1,16E-04 9 c2 LinModHist Max 1,06E-02 3,97E-04 4,38E-03 9 c2 LinModHist Min -1,06E-02 -3,82E-04 -4,38E-03
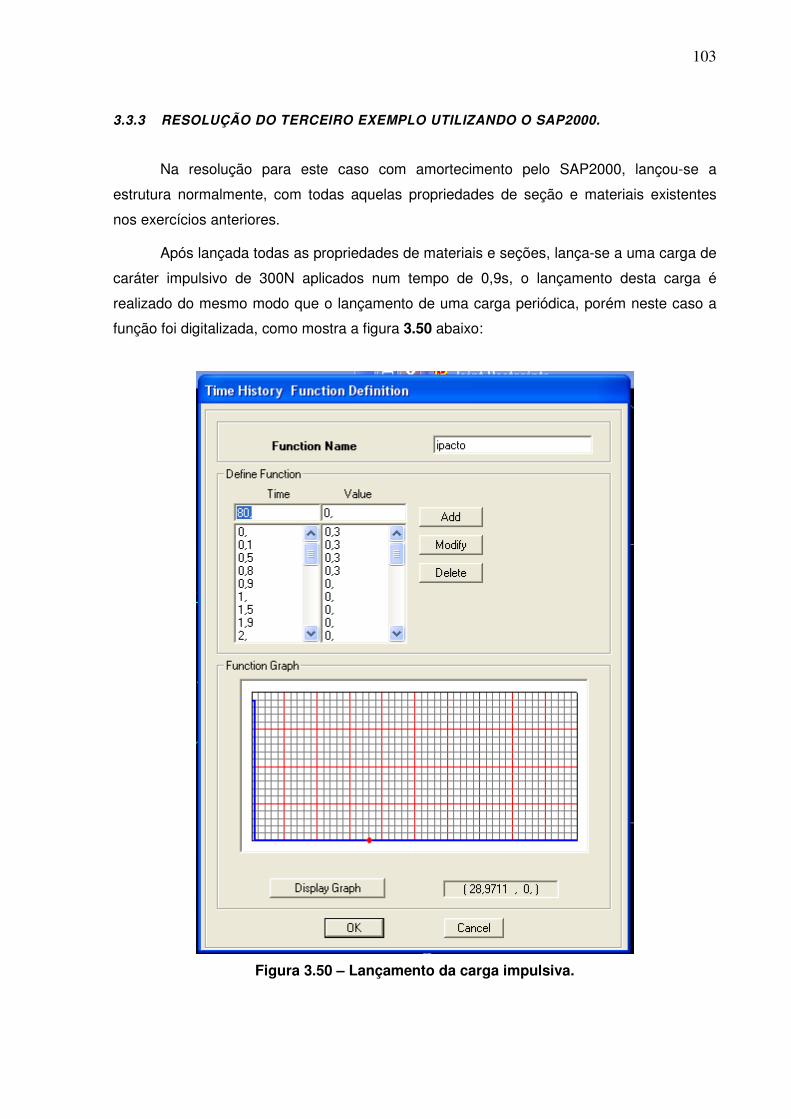
103
3.3.3 RESOLUÇÃO DO TERCEIRO EXEMPLO UTILIZANDO O SAP2000.
Na resolução para este caso com amortecimento pelo SAP2000, lançou-se a
estrutura normalmente, com todas aquelas propriedades de seção e materiais existentes
nos exercícios anteriores.
Após lançada todas as propriedades de materiais e seções, lança-se a uma carga de
caráter impulsivo de 300N aplicados num tempo de 0,9s, o lançamento desta carga é
realizado do mesmo modo que o lançamento de uma carga periódica, porém neste caso a
função foi digitalizada, como mostra a figura 3.50 abaixo:
Figura 3.50 – Lançamento da carga impulsiva.
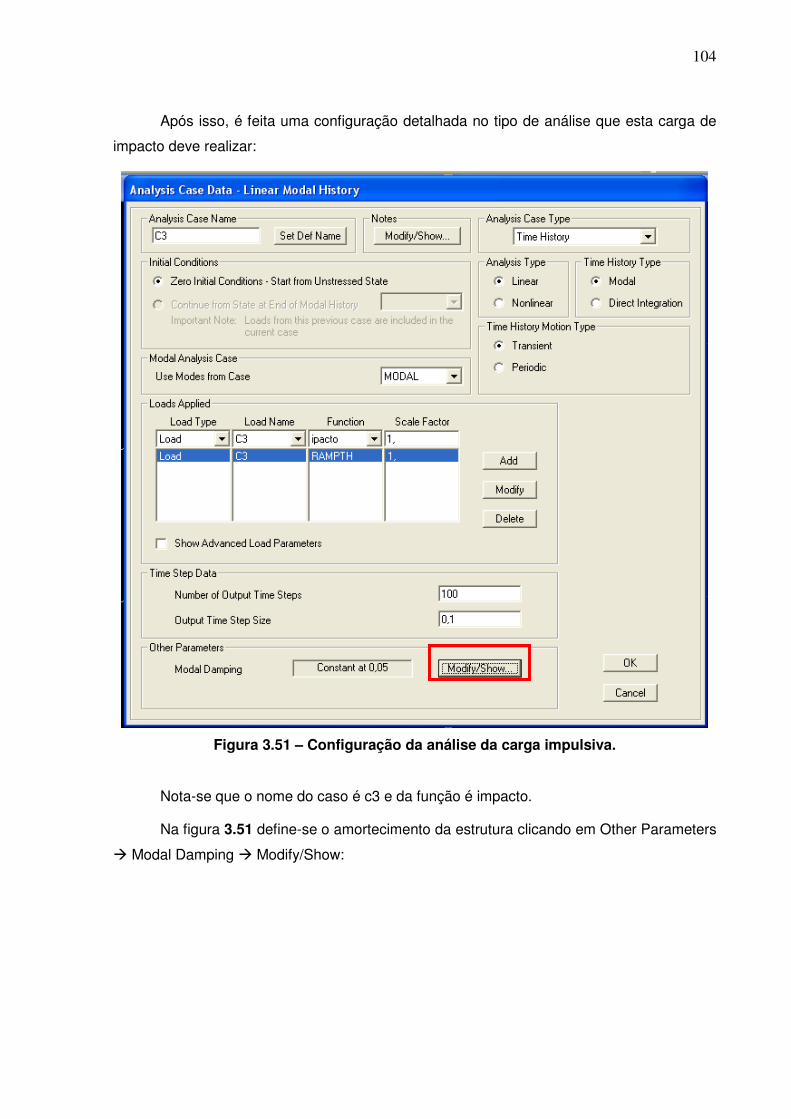
104
Após isso, é feita uma configuração detalhada no tipo de análise que esta carga de
impacto deve realizar:
Figura 3.51 – Configuração da análise da carga impulsiva.
Nota-se que o nome do caso é c3 e da função é impacto.
Na figura 3.51 define-se o amortecimento da estrutura clicando em Other Parameters
Modal Damping Modify/Show:
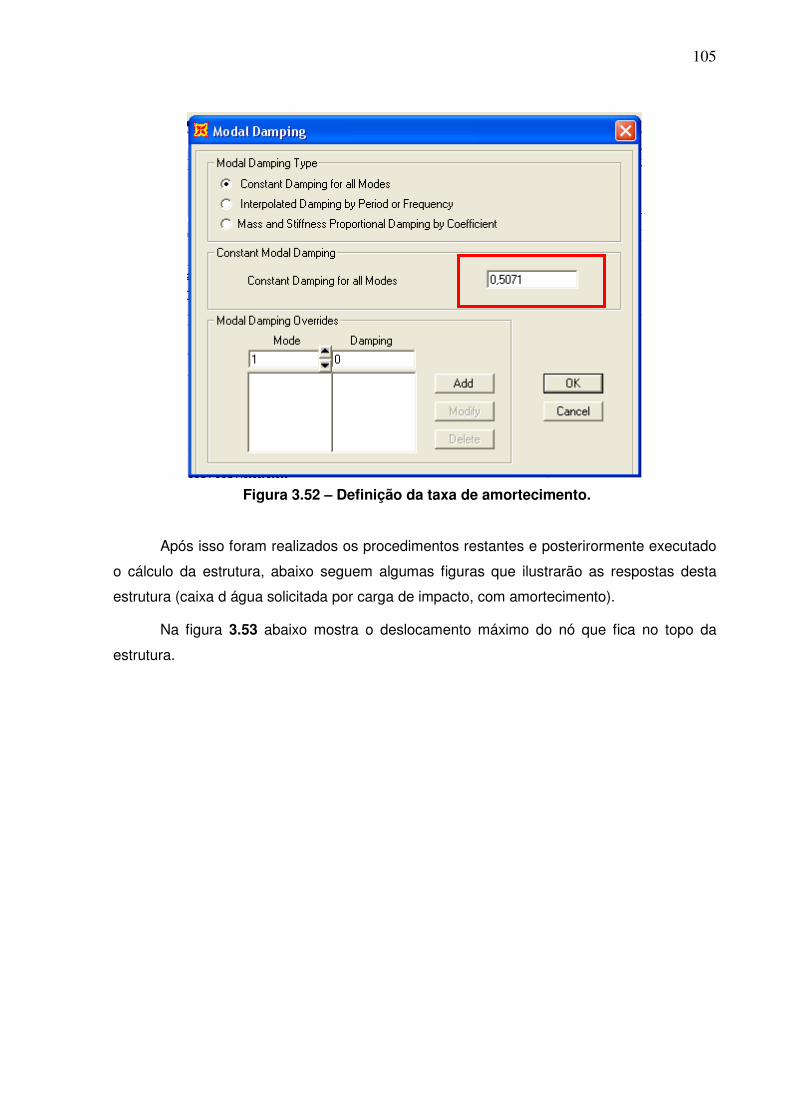
105
Figura 3.52 – Definição da taxa de amortecimento.
Após isso foram realizados os procedimentos restantes e posterirormente executado
o cálculo da estrutura, abaixo seguem algumas figuras que ilustrarão as respostas desta
estrutura (caixa d água solicitada por carga de impacto, com amortecimento).
Na figura 3.53 abaixo mostra o deslocamento máximo do nó que fica no topo da
estrutura.
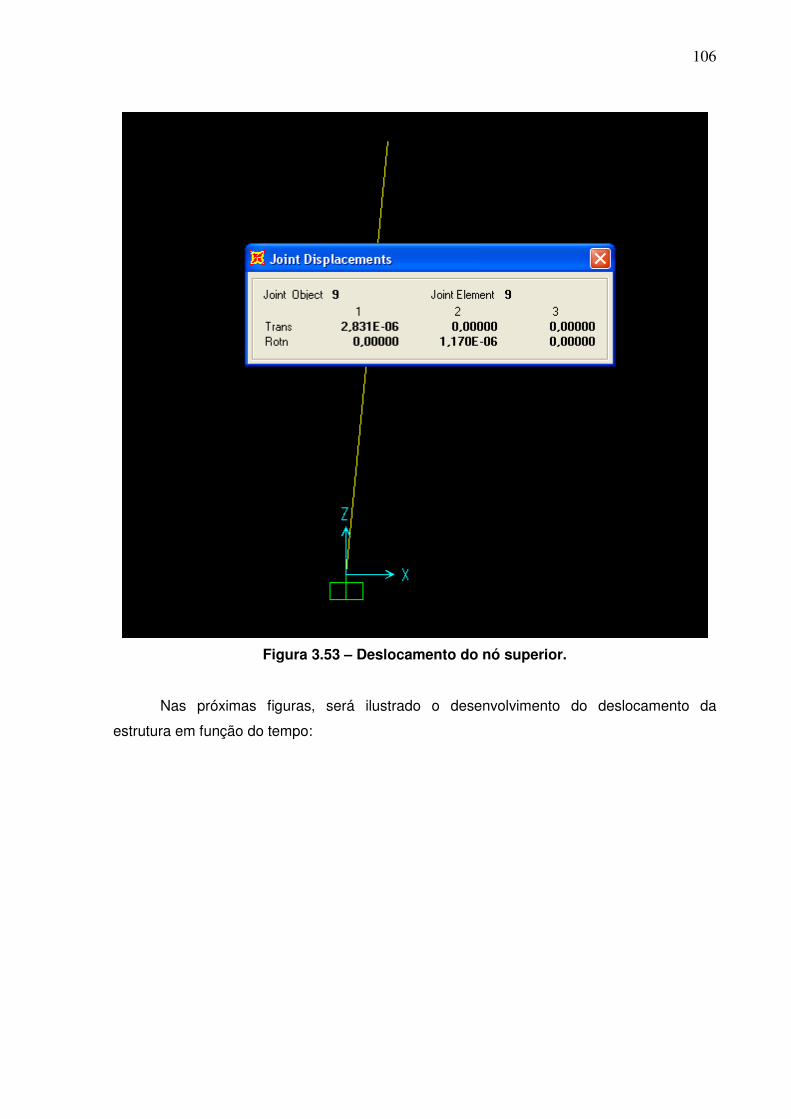
106
Figura 3.53 – Deslocamento do nó superior.
Nas próximas figuras, será ilustrado o desenvolvimento do deslocamento da
estrutura em função do tempo:
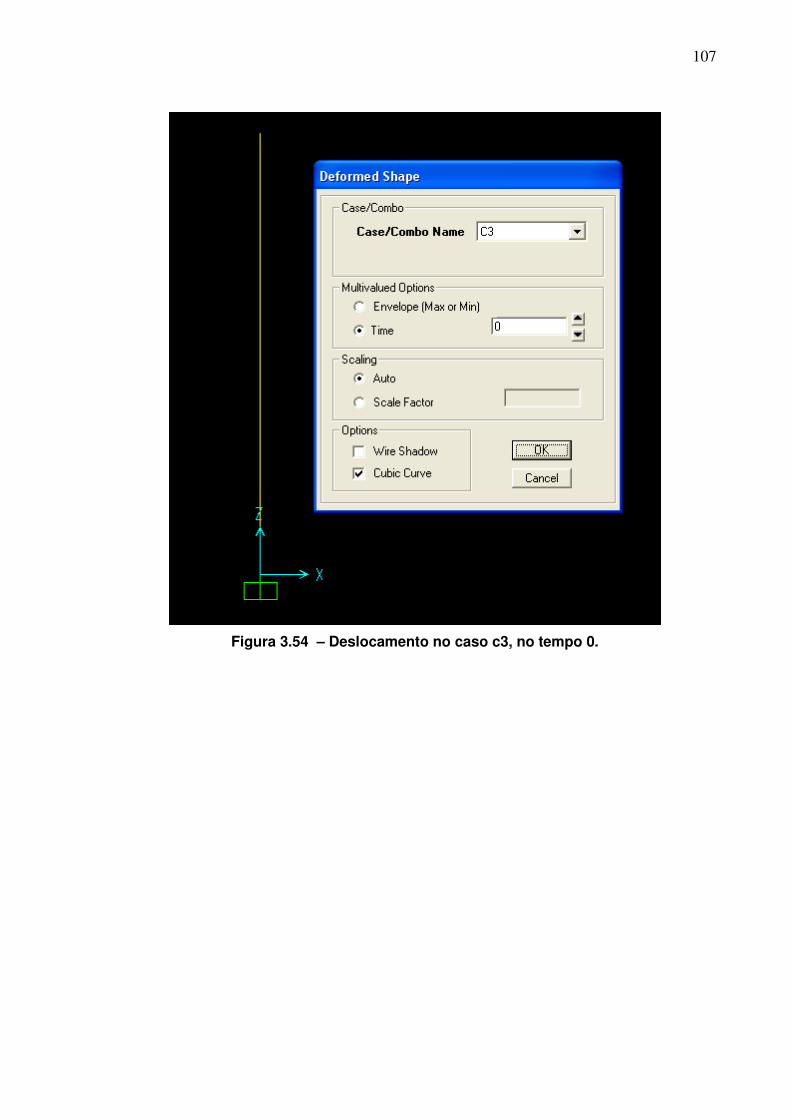
107
Figura 3.54 – Deslocamento no caso c3, no tempo 0.
108
Figura 3.55 – Deslocamento no caso c3, no tempo 0,2.
109
Figura 3.56 – Deslocamento no caso c3, no tempo 0,6.
110
Figura 3.57 – Deslocamento no caso c3, no tempo 0,9.
111
Figura 3.58 – Deslocamento no caso c3, no tempo 2,5.
Nota-se que no tempo aproximadamente após 0,9 segundos, o deslocamento é nulo
e fica para sempre nulo, isto ocorreu devido a presença do amortecimento na estrutura.
Todas as estruturas reais possuem um certo grau de amortecimento, esse amortecimento
varia de acordo com as propridades do material.
Comparando este caso com o exemplo resolvido manualmente nota-se uma grande
semelhança pois no gráfico gerado pelo exemplo manual a estrutura começa a ter
deslocamentos insginificantes a partir do tempo de 0,9s.
No caso do deslocamento máximo, os valores não deram muito parecidos, porem
isso se deve ao fato de que no caso resolvido manualmente já se supois inicialmente que o
deslocamento máximo causado pela carga impulsiva era um número já pré – definido e
estipulado, no caso do cálculo realizado pelo SAP2000 esse deslocamento máximo foi
realmente calculado.
112
4. APLICAÇÕES
Este capítulo pretende abordar diversos exemplos de estruturas no programa
SAP2000 e efetuar comparações entre as respostas obtidas. Os parâmetros de comparação
para essas estruturas serão feitos variando a inércia da estrutura, o material, as condições
de apoio, entre outros.
4.1 VIGAS
Neste tópico pretende-se abordar aspectos comparativos entre as respostas
dinâmicas geradas pelo SAP2000, o principal intuito desta pesquisa é verificar como essas
respostas geradas se relacionam com as inércias das seções, com os tipos de materiais,
com os tamanhos dos vãos da estrutura.
4.1.1 EXEMPLO DE UMA VIGA ENGASTADA
Neste caso foram resolvidos inúmeros casos no SAP2000 de uma viga engastada
em apenas um dos apoios, com vão de 5 metros de material concreto armado (com barras
de Φ=10mm), ressalta-se que essa viga possui apenas um grau de liberdade, que é a seu
único nó livre. As propriedades do concreto são mostradas na figura 4.1 abaixo:
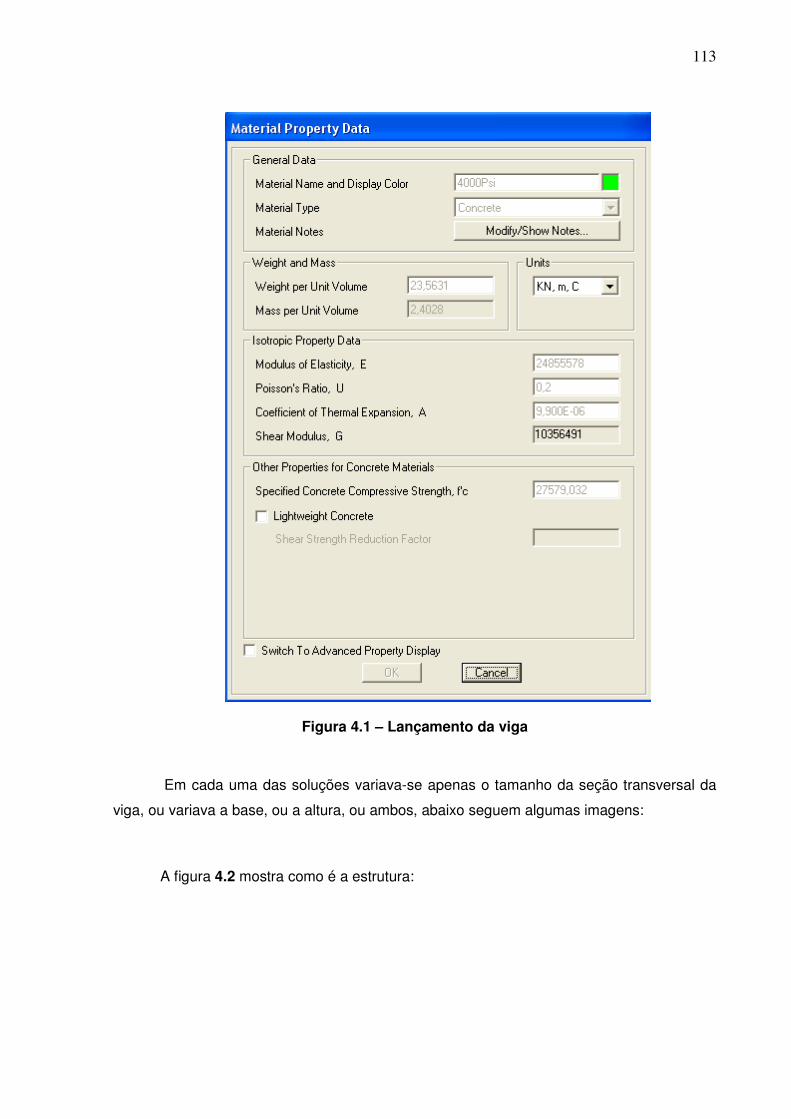
113
Figura 4.1 – Lançamento da viga
Em cada uma das soluções variava-se apenas o tamanho da seção transversal da
viga, ou variava a base, ou a altura, ou ambos, abaixo seguem algumas imagens:
A figura 4.2 mostra como é a estrutura:
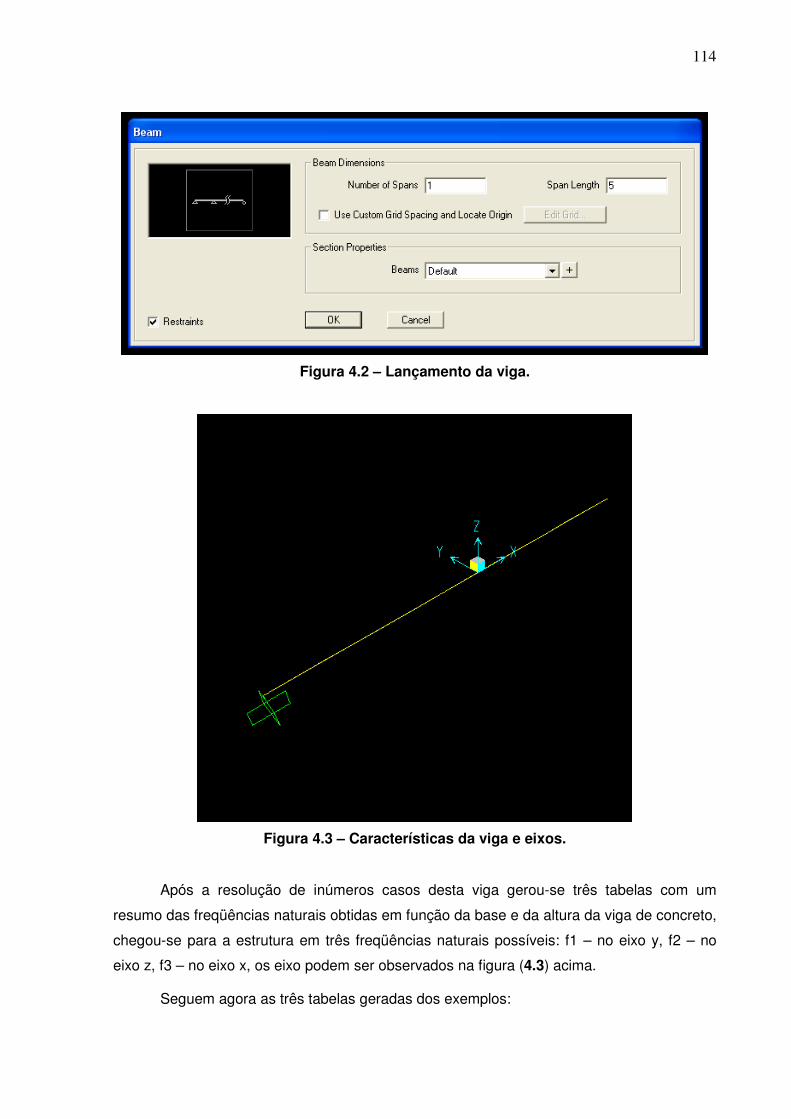
114
Figura 4.2 – Lançamento da viga.
Figura 4.3 – Características da viga e eixos.
Após a resolução de inúmeros casos desta viga gerou-se três tabelas com um
resumo das freqüências naturais obtidas em função da base e da altura da viga de concreto,
chegou-se para a estrutura em três freqüências naturais possíveis: f1 – no eixo y, f2 – no
eixo z, f3 – no eixo x, os eixo podem ser observados na figura (4.3) acima.
Seguem agora as três tabelas geradas dos exemplos:
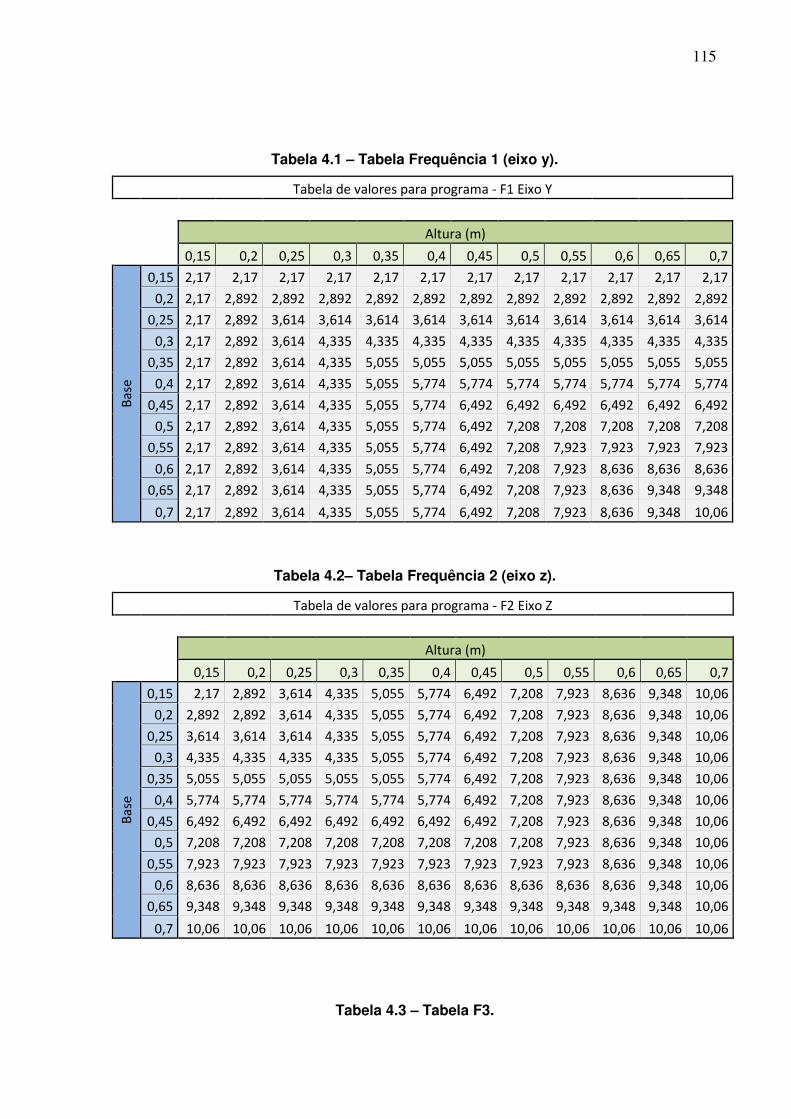
115
Tabela 4.1 – Tabela Frequência 1 (eixo y).
Tabela de valores para programa - F1 Eixo Y
Altura (m)
0,15 0,2 0,25 0,3 0,35 0,4 0,45 0,5 0,55 0,6 0,65 0,7
Ba
se
0,15 2,17 2,17 2,17 2,17 2,17 2,17 2,17 2,17 2,17 2,17 2,17 2,17
0,2 2,17 2,892 2,892 2,892 2,892 2,892 2,892 2,892 2,892 2,892 2,892 2,892
0,25 2,17 2,892 3,614 3,614 3,614 3,614 3,614 3,614 3,614 3,614 3,614 3,614
0,3 2,17 2,892 3,614 4,335 4,335 4,335 4,335 4,335 4,335 4,335 4,335 4,335
0,35 2,17 2,892 3,614 4,335 5,055 5,055 5,055 5,055 5,055 5,055 5,055 5,055
0,4 2,17 2,892 3,614 4,335 5,055 5,774 5,774 5,774 5,774 5,774 5,774 5,774
0,45 2,17 2,892 3,614 4,335 5,055 5,774 6,492 6,492 6,492 6,492 6,492 6,492
0,5 2,17 2,892 3,614 4,335 5,055 5,774 6,492 7,208 7,208 7,208 7,208 7,208
0,55 2,17 2,892 3,614 4,335 5,055 5,774 6,492 7,208 7,923 7,923 7,923 7,923
0,6 2,17 2,892 3,614 4,335 5,055 5,774 6,492 7,208 7,923 8,636 8,636 8,636
0,65 2,17 2,892 3,614 4,335 5,055 5,774 6,492 7,208 7,923 8,636 9,348 9,348
0,7 2,17 2,892 3,614 4,335 5,055 5,774 6,492 7,208 7,923 8,636 9,348 10,06
Tabela 4.2– Tabela Frequência 2 (eixo z).
Tabela de valores para programa - F2 Eixo Z
Altura (m)
0,15 0,2 0,25 0,3 0,35 0,4 0,45 0,5 0,55 0,6 0,65 0,7
Ba
se
0,15 2,17 2,892 3,614 4,335 5,055 5,774 6,492 7,208 7,923 8,636 9,348 10,06
0,2 2,892 2,892 3,614 4,335 5,055 5,774 6,492 7,208 7,923 8,636 9,348 10,06
0,25 3,614 3,614 3,614 4,335 5,055 5,774 6,492 7,208 7,923 8,636 9,348 10,06
0,3 4,335 4,335 4,335 4,335 5,055 5,774 6,492 7,208 7,923 8,636 9,348 10,06
0,35 5,055 5,055 5,055 5,055 5,055 5,774 6,492 7,208 7,923 8,636 9,348 10,06
0,4 5,774 5,774 5,774 5,774 5,774 5,774 6,492 7,208 7,923 8,636 9,348 10,06
0,45 6,492 6,492 6,492 6,492 6,492 6,492 6,492 7,208 7,923 8,636 9,348 10,06
0,5 7,208 7,208 7,208 7,208 7,208 7,208 7,208 7,208 7,923 8,636 9,348 10,06
0,55 7,923 7,923 7,923 7,923 7,923 7,923 7,923 7,923 7,923 8,636 9,348 10,06
0,6 8,636 8,636 8,636 8,636 8,636 8,636 8,636 8,636 8,636 8,636 9,348 10,06
0,65 9,348 9,348 9,348 9,348 9,348 9,348 9,348 9,348 9,348 9,348 9,348 10,06
0,7 10,06 10,06 10,06 10,06 10,06 10,06 10,06 10,06 10,06 10,06 10,06 10,06
Tabela 4.3 – Tabela F3.
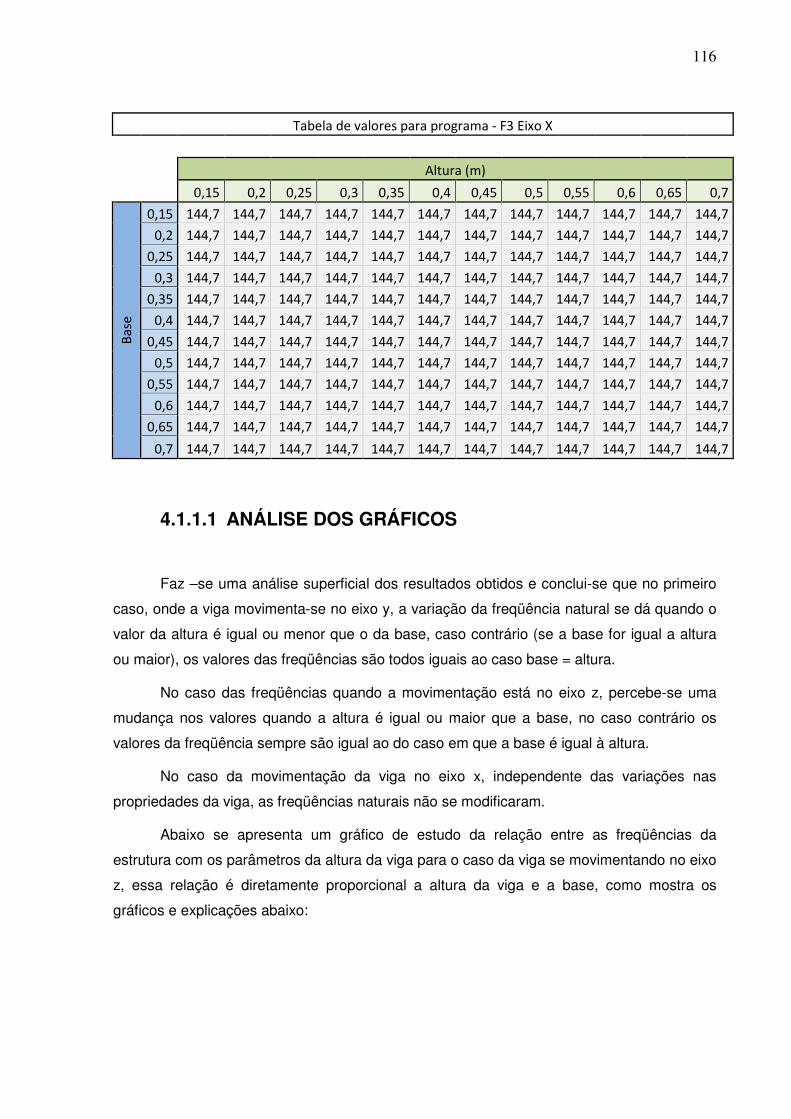
116
Tabela de valores para programa - F3 Eixo X
Altura (m)
0,15 0,2 0,25 0,3 0,35 0,4 0,45 0,5 0,55 0,6 0,65 0,7
Ba
se
0,15 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
0,2 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
0,25 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
0,3 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
0,35 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
0,4 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
0,45 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
0,5 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
0,55 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
0,6 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
0,65 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
0,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7 144,7
4.1.1.1 ANÁLISE DOS GRÁFICOS
Faz –se uma análise superficial dos resultados obtidos e conclui-se que no primeiro
caso, onde a viga movimenta-se no eixo y, a variação da freqüência natural se dá quando o
valor da altura é igual ou menor que o da base, caso contrário (se a base for igual a altura
ou maior), os valores das freqüências são todos iguais ao caso base = altura.
No caso das freqüências quando a movimentação está no eixo z, percebe-se uma
mudança nos valores quando a altura é igual ou maior que a base, no caso contrário os
valores da freqüência sempre são igual ao do caso em que a base é igual à altura.
No caso da movimentação da viga no eixo x, independente das variações nas
propriedades da viga, as freqüências naturais não se modificaram.
Abaixo se apresenta um gráfico de estudo da relação entre as freqüências da
estrutura com os parâmetros da altura da viga para o caso da viga se movimentando no eixo
z, essa relação é diretamente proporcional a altura da viga e a base, como mostra os
gráficos e explicações abaixo:
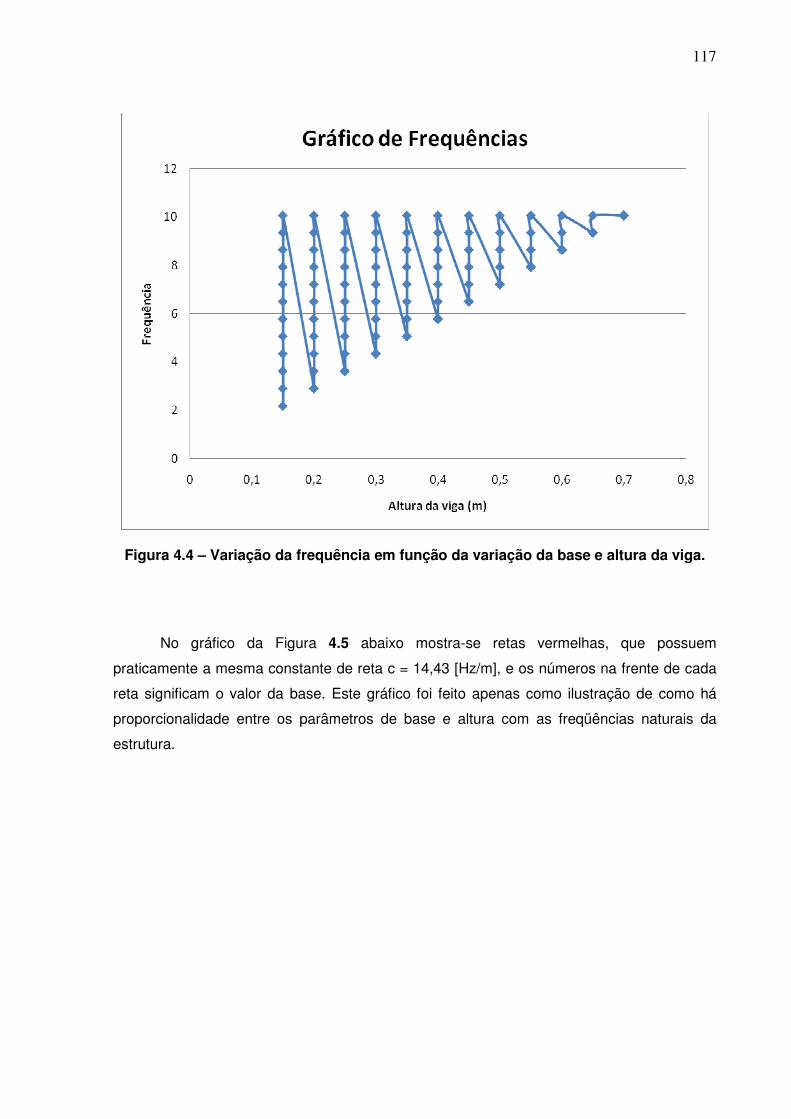
117
Figura 4.4 – Variação da frequência em função da variação da base e altura da viga.
No gráfico da Figura 4.5 abaixo mostra-se retas vermelhas, que possuem
praticamente a mesma constante de reta c = 14,43 [Hz/m], e os números na frente de cada
reta significam o valor da base. Este gráfico foi feito apenas como ilustração de como há
proporcionalidade entre os parâmetros de base e altura com as freqüências naturais da
estrutura.
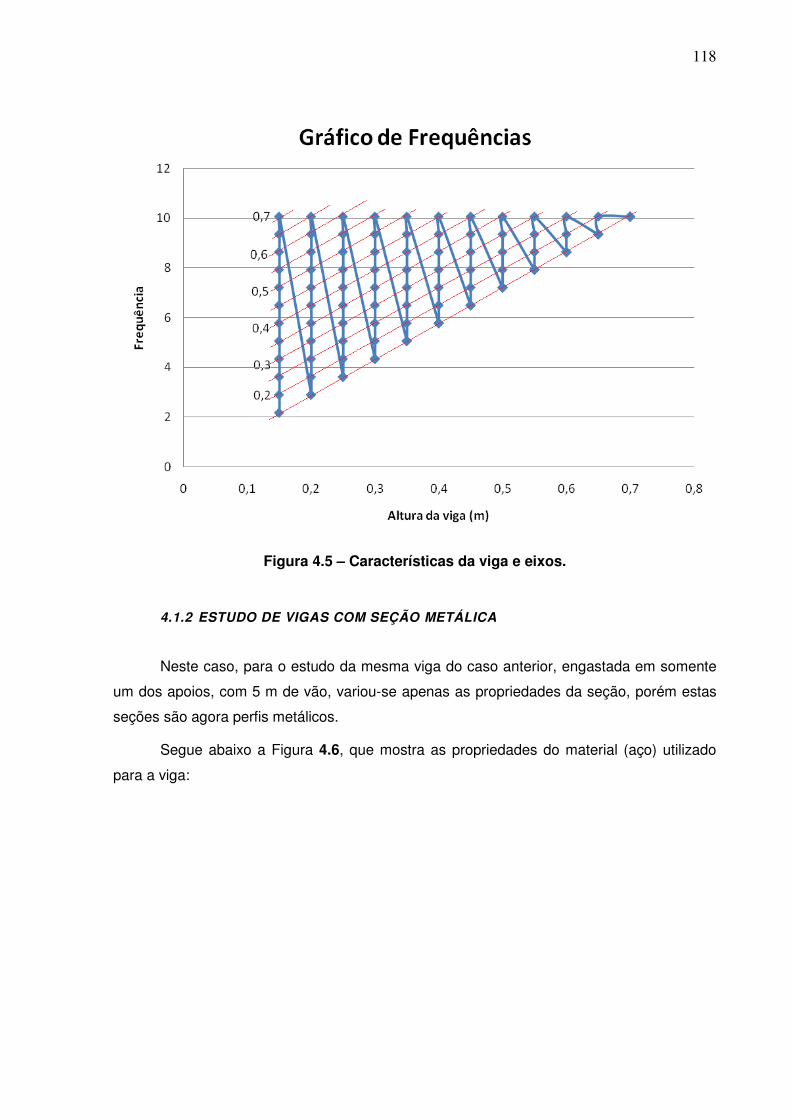
118
Figura 4.5 – Características da viga e eixos.
4.1.2 ESTUDO DE VIGAS COM SEÇÃO METÁLICA
Neste caso, para o estudo da mesma viga do caso anterior, engastada em somente
um dos apoios, com 5 m de vão, variou-se apenas as propriedades da seção, porém estas
seções são agora perfis metálicos.
Segue abaixo a Figura 4.6, que mostra as propriedades do material (aço) utilizado
para a viga:
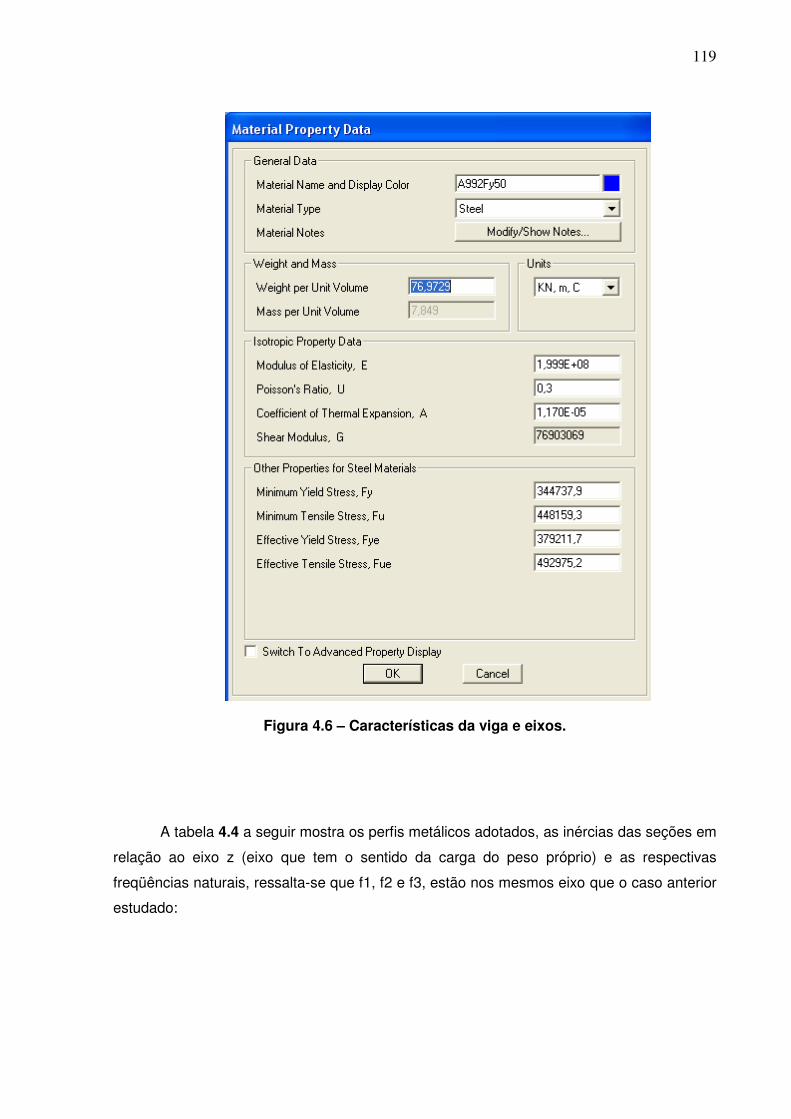
119
Figura 4.6 – Características da viga e eixos.
A tabela 4.4 a seguir mostra os perfis metálicos adotados, as inércias das seções em
relação ao eixo z (eixo que tem o sentido da carga do peso próprio) e as respectivas
freqüências naturais, ressalta-se que f1, f2 e f3, estão nos mesmos eixo que o caso anterior
estudado:
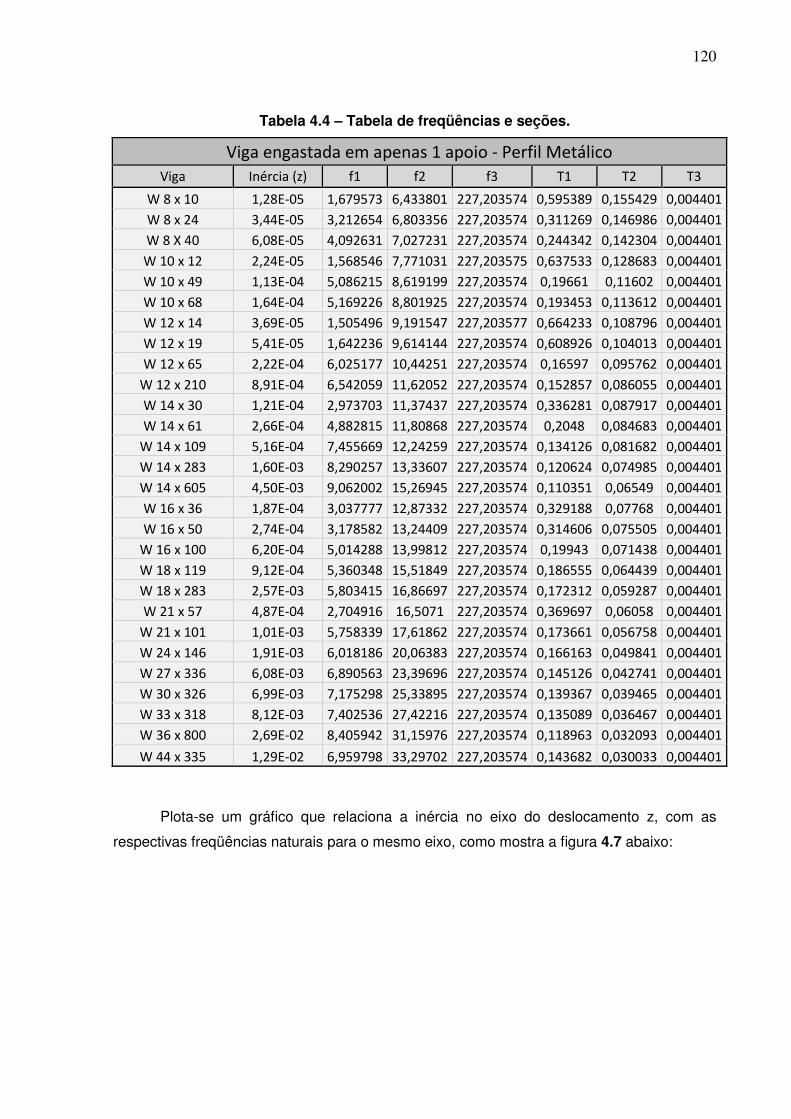
120
Tabela 4.4 – Tabela de freqüências e seções.
Viga engastada em apenas 1 apoio - Perfil Metálico
Viga Inércia (z) f1 f2 f3 T1 T2 T3
W 8 x 10 1,28E-05 1,679573 6,433801 227,203574 0,595389 0,155429 0,004401
W 8 x 24 3,44E-05 3,212654 6,803356 227,203574 0,311269 0,146986 0,004401
W 8 X 40 6,08E-05 4,092631 7,027231 227,203574 0,244342 0,142304 0,004401
W 10 x 12 2,24E-05 1,568546 7,771031 227,203575 0,637533 0,128683 0,004401
W 10 x 49 1,13E-04 5,086215 8,619199 227,203574 0,19661 0,11602 0,004401
W 10 x 68 1,64E-04 5,169226 8,801925 227,203574 0,193453 0,113612 0,004401
W 12 x 14 3,69E-05 1,505496 9,191547 227,203577 0,664233 0,108796 0,004401
W 12 x 19 5,41E-05 1,642236 9,614144 227,203574 0,608926 0,104013 0,004401
W 12 x 65 2,22E-04 6,025177 10,44251 227,203574 0,16597 0,095762 0,004401
W 12 x 210 8,91E-04 6,542059 11,62052 227,203574 0,152857 0,086055 0,004401
W 14 x 30 1,21E-04 2,973703 11,37437 227,203574 0,336281 0,087917 0,004401
W 14 x 61 2,66E-04 4,882815 11,80868 227,203574 0,2048 0,084683 0,004401
W 14 x 109 5,16E-04 7,455669 12,24259 227,203574 0,134126 0,081682 0,004401
W 14 x 283 1,60E-03 8,290257 13,33607 227,203574 0,120624 0,074985 0,004401
W 14 x 605 4,50E-03 9,062002 15,26945 227,203574 0,110351 0,06549 0,004401
W 16 x 36 1,87E-04 3,037777 12,87332 227,203574 0,329188 0,07768 0,004401
W 16 x 50 2,74E-04 3,178582 13,24409 227,203574 0,314606 0,075505 0,004401
W 16 x 100 6,20E-04 5,014288 13,99812 227,203574 0,19943 0,071438 0,004401
W 18 x 119 9,12E-04 5,360348 15,51849 227,203574 0,186555 0,064439 0,004401
W 18 x 283 2,57E-03 5,803415 16,86697 227,203574 0,172312 0,059287 0,004401
W 21 x 57 4,87E-04 2,704916 16,5071 227,203574 0,369697 0,06058 0,004401
W 21 x 101 1,01E-03 5,758339 17,61862 227,203574 0,173661 0,056758 0,004401
W 24 x 146 1,91E-03 6,018186 20,06383 227,203574 0,166163 0,049841 0,004401
W 27 x 336 6,08E-03 6,890563 23,39696 227,203574 0,145126 0,042741 0,004401
W 30 x 326 6,99E-03 7,175298 25,33895 227,203574 0,139367 0,039465 0,004401
W 33 x 318 8,12E-03 7,402536 27,42216 227,203574 0,135089 0,036467 0,004401
W 36 x 800 2,69E-02 8,405942 31,15976 227,203574 0,118963 0,032093 0,004401
W 44 x 335 1,29E-02 6,959798 33,29702 227,203574 0,143682 0,030033 0,004401
Plota-se um gráfico que relaciona a inércia no eixo do deslocamento z, com as
respectivas freqüências naturais para o mesmo eixo, como mostra a figura 4.7 abaixo:
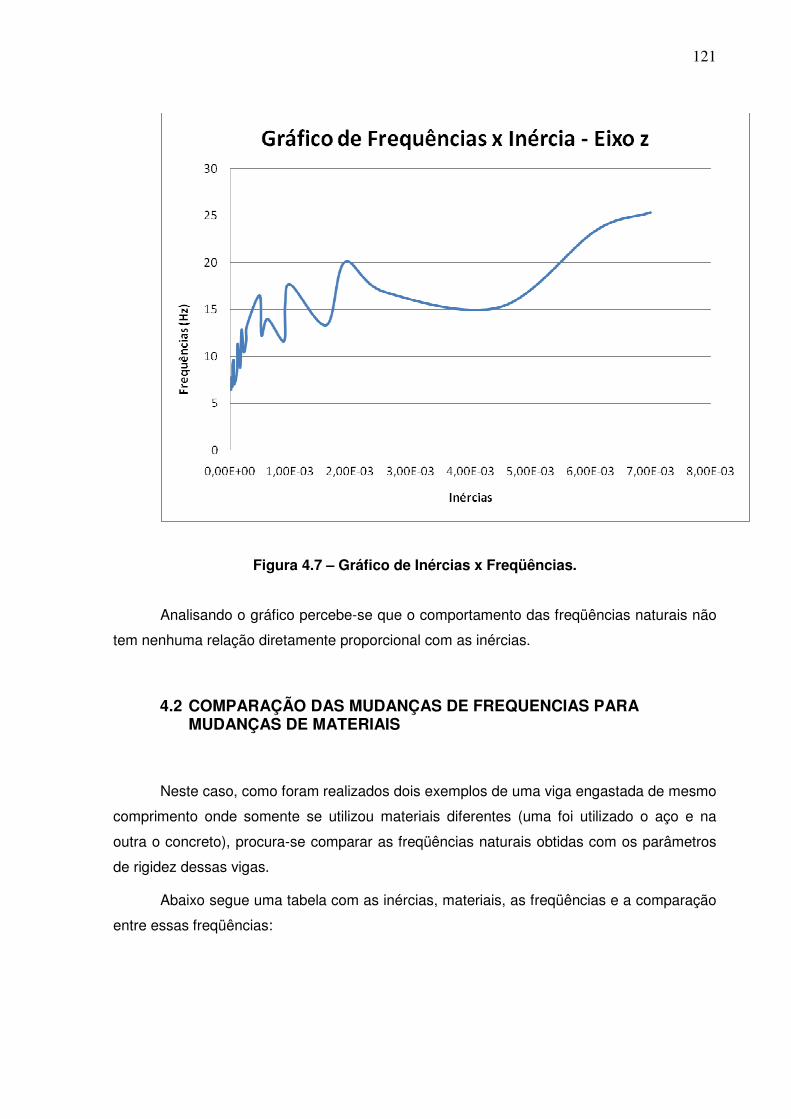
121
Figura 4.7 – Gráfico de Inércias x Freqüências.
Analisando o gráfico percebe-se que o comportamento das freqüências naturais não
tem nenhuma relação diretamente proporcional com as inércias.
4.2 COMPARAÇÃO DAS MUDANÇAS DE FREQUENCIAS PARA MUDANÇAS DE MATERIAIS
Neste caso, como foram realizados dois exemplos de uma viga engastada de mesmo
comprimento onde somente se utilizou materiais diferentes (uma foi utilizado o aço e na
outra o concreto), procura-se comparar as freqüências naturais obtidas com os parâmetros
de rigidez dessas vigas.
Abaixo segue uma tabela com as inércias, materiais, as freqüências e a comparação
entre essas freqüências:
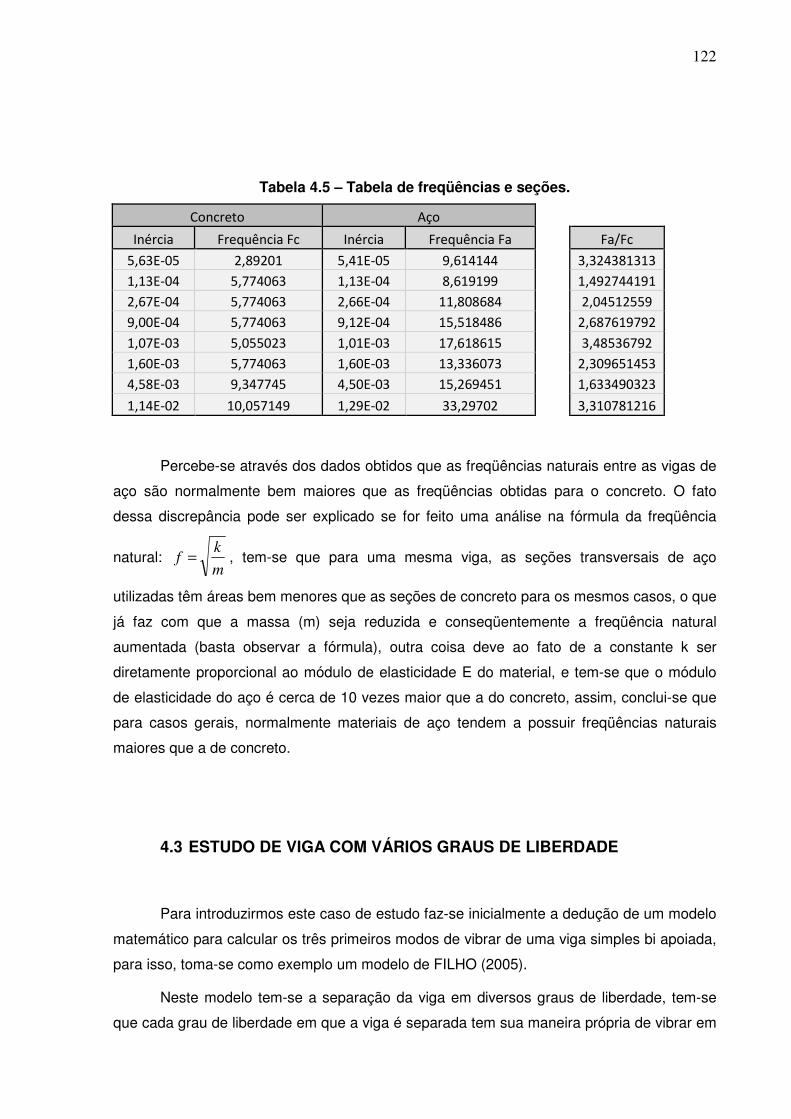
122
Tabela 4.5 – Tabela de freqüências e seções.
Concreto Aço
Inércia Frequência Fc Inércia Frequência Fa
Fa/Fc
5,63E-05 2,89201 5,41E-05 9,614144
3,324381313
1,13E-04 5,774063 1,13E-04 8,619199
1,492744191
2,67E-04 5,774063 2,66E-04 11,808684
2,04512559
9,00E-04 5,774063 9,12E-04 15,518486
2,687619792
1,07E-03 5,055023 1,01E-03 17,618615
3,48536792
1,60E-03 5,774063 1,60E-03 13,336073
2,309651453
4,58E-03 9,347745 4,50E-03 15,269451
1,633490323
1,14E-02 10,057149 1,29E-02 33,29702
3,310781216
Percebe-se através dos dados obtidos que as freqüências naturais entre as vigas de
aço são normalmente bem maiores que as freqüências obtidas para o concreto. O fato
dessa discrepância pode ser explicado se for feito uma análise na fórmula da freqüência
natural: m
kf = , tem-se que para uma mesma viga, as seções transversais de aço
utilizadas têm áreas bem menores que as seções de concreto para os mesmos casos, o que
já faz com que a massa (m) seja reduzida e conseqüentemente a freqüência natural
aumentada (basta observar a fórmula), outra coisa deve ao fato de a constante k ser
diretamente proporcional ao módulo de elasticidade E do material, e tem-se que o módulo
de elasticidade do aço é cerca de 10 vezes maior que a do concreto, assim, conclui-se que
para casos gerais, normalmente materiais de aço tendem a possuir freqüências naturais
maiores que a de concreto.
4.3 ESTUDO DE VIGA COM VÁRIOS GRAUS DE LIBERDADE
Para introduzirmos este caso de estudo faz-se inicialmente a dedução de um modelo
matemático para calcular os três primeiros modos de vibrar de uma viga simples bi apoiada,
para isso, toma-se como exemplo um modelo de FILHO (2005).
Neste modelo tem-se a separação da viga em diversos graus de liberdade, tem-se
que cada grau de liberdade em que a viga é separada tem sua maneira própria de vibrar em
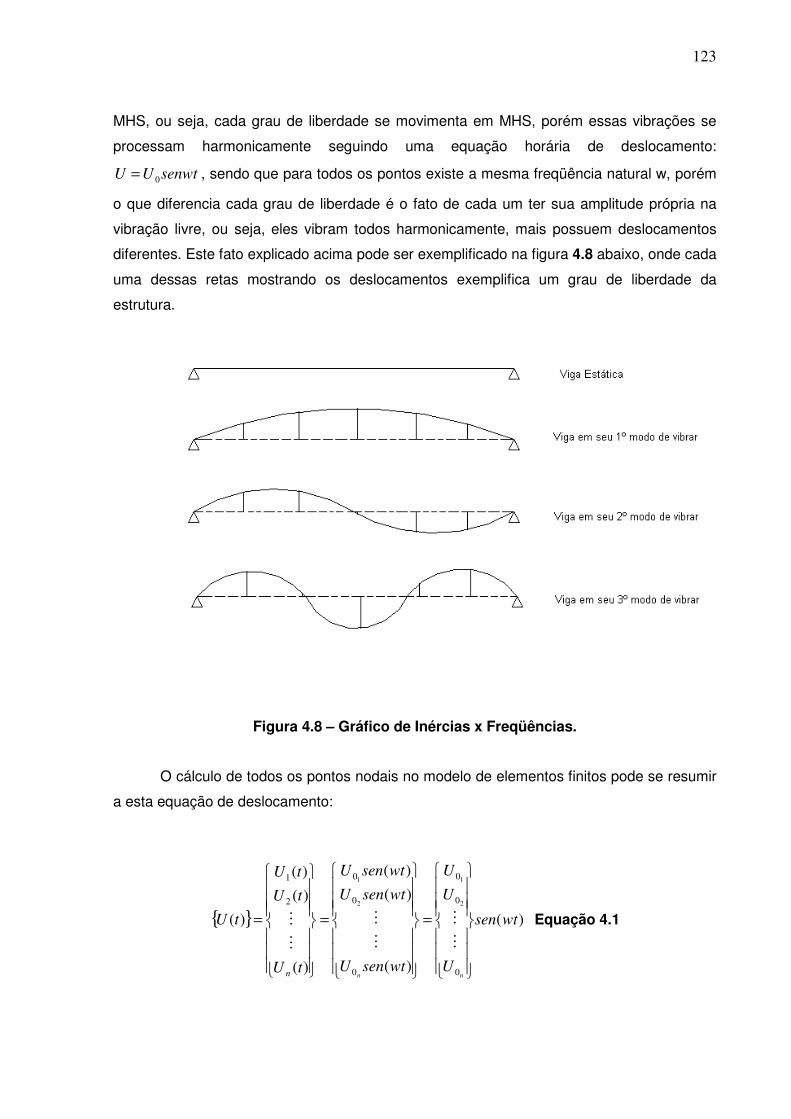
123
MHS, ou seja, cada grau de liberdade se movimenta em MHS, porém essas vibrações se
processam harmonicamente seguindo uma equação horária de deslocamento:
senwtUU 0= , sendo que para todos os pontos existe a mesma freqüência natural w, porém
o que diferencia cada grau de liberdade é o fato de cada um ter sua amplitude própria na
vibração livre, ou seja, eles vibram todos harmonicamente, mais possuem deslocamentos
diferentes. Este fato explicado acima pode ser exemplificado na figura 4.8 abaixo, onde cada
uma dessas retas mostrando os deslocamentos exemplifica um grau de liberdade da
estrutura.
Figura 4.8 – Gráfico de Inércias x Freqüências.
O cálculo de todos os pontos nodais no modelo de elementos finitos pode se resumir
a esta equação de deslocamento:
)(
)(
)(
)(
)(
)(
)(
)(
0
0
0
0
0
0
2
1
2
1
2
1
wtsen
U
U
U
wtsenU
wtsenU
wtsenU
tU
tU
tU
tU
nnn
=
=
=
M
M
M
M
M
M Equação 4.1
124
Para esses casos da viga, se chega que os modos de vibrar do primeiro, segundo e
terceiro modos são respectivamente:
µ
π EI
Lw
²
²1 = Equação 4.2
12 4ww = Equação 4.3
11 9ww = Equação 4.4
Onde o parâmetro µ é dado por: massa / comprimento.
4.3.1 EXEMPLO PRÁTICO
Agora é feito um exemplo de uma viga bi apoiada no software SAP2000 com vários
graus de liberdade, com o objetivo de se calcular suas freqüências e verificar seus modos
de vibração, o mesmo exemplo também é realizado por meio do cálculo manual com o uso
das equações descritas no item acima, posteriormente é realizado uma comparação entre
os resultados.
Primeiramente são realizados os cálculos manuais dos três modos de vibrar da viga,
abaixo seguem os cálculos e a descrição da viga:
• Viga bi apoiada de 5m de vão com seção retangular de concreto de 0,50m (h)
x 0,20m (l)
• Concreto com módulo de elasticidade de 2,48555 x 107 Kn/m²
• Massa por volume = 2,408 Kg/m³
• Peso por volume = 23,5631 Kn/m³
• Fck de aprox. 27,5 Mpa
125
Abaixo segue uma figura ilustrativa da viga e da sua seção:
Figura 4.9 – Gráfico de Inércias x Freqüências.
Segue agora abaixo os caçulos das freqüências naturais:
258,18324028,0
0020833,0.24855578
²5
²1415,3
²
²1 ===
µ
π EI
Lw Equação 4.2
][167,29]/[258,1831 Hzsradw ==
668,116167,29.44 12 === ww [Hz] Equação 4.3
503,262167,29.99 11 === ww [Hz] Equação 4.4
Agora o mesmo exemplo é calculado com vários graus de liberdade no programa
SAP2000, como está explicado abaixo:
Primeiramente são mostradas as características do concreto utilizado na viga, como
mostra a figura 4.10 abaixo:
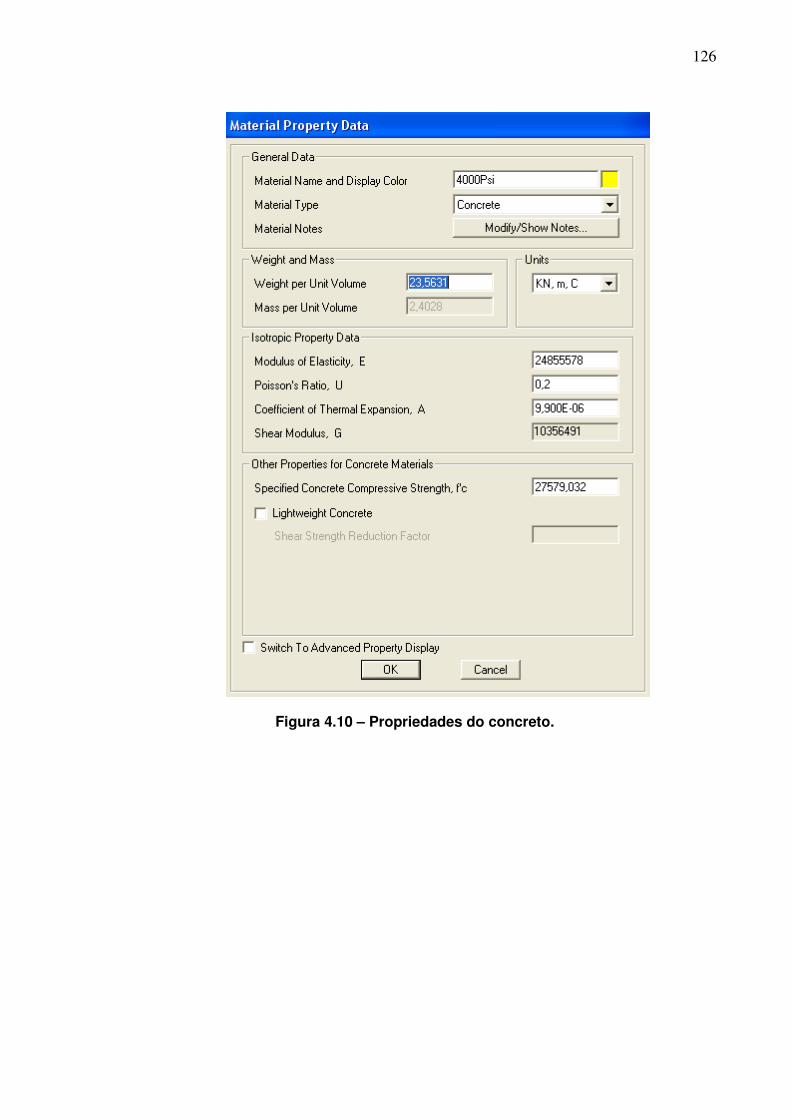
126
Figura 4.10 – Propriedades do concreto.
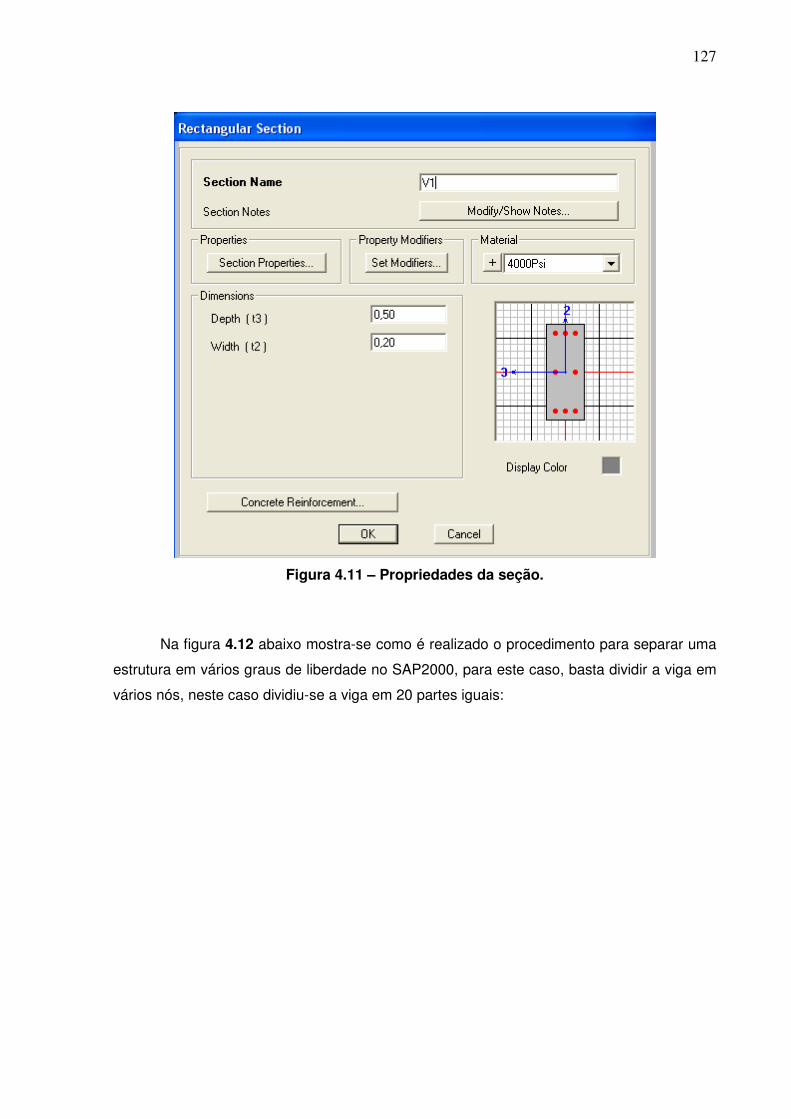
127
Figura 4.11 – Propriedades da seção.
Na figura 4.12 abaixo mostra-se como é realizado o procedimento para separar uma
estrutura em vários graus de liberdade no SAP2000, para este caso, basta dividir a viga em
vários nós, neste caso dividiu-se a viga em 20 partes iguais:
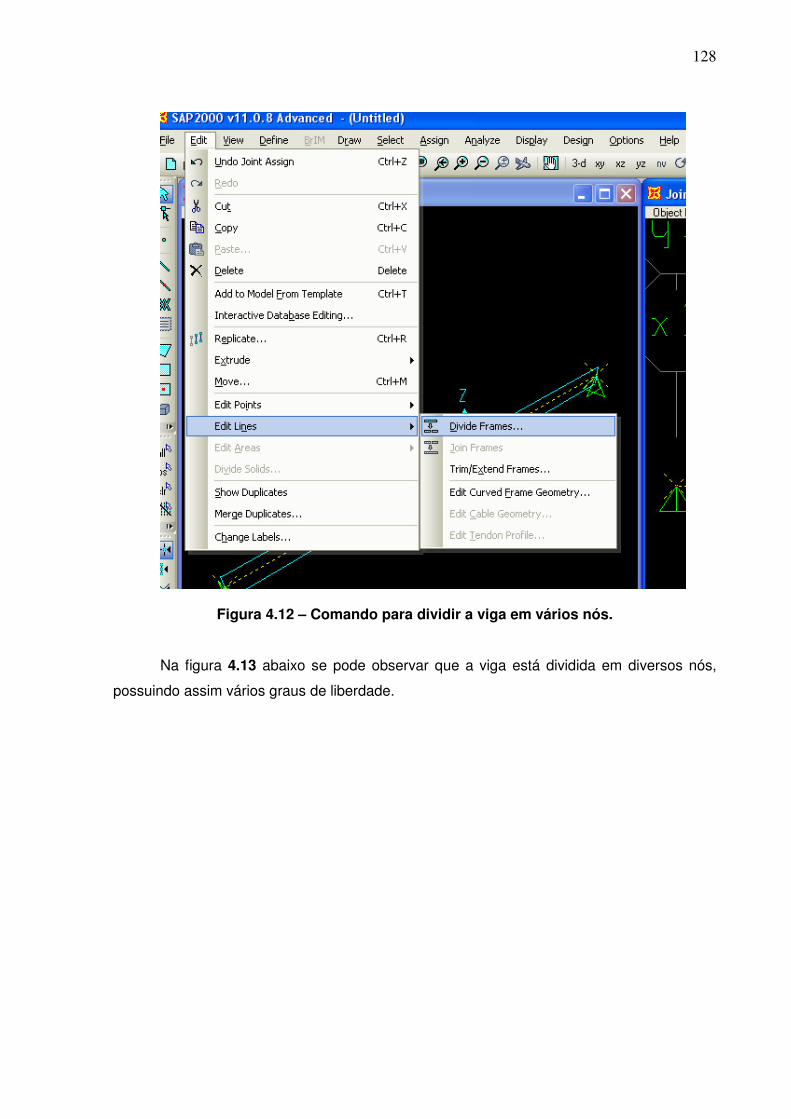
128
Figura 4.12 – Comando para dividir a viga em vários nós.
Na figura 4.13 abaixo se pode observar que a viga está dividida em diversos nós,
possuindo assim vários graus de liberdade.
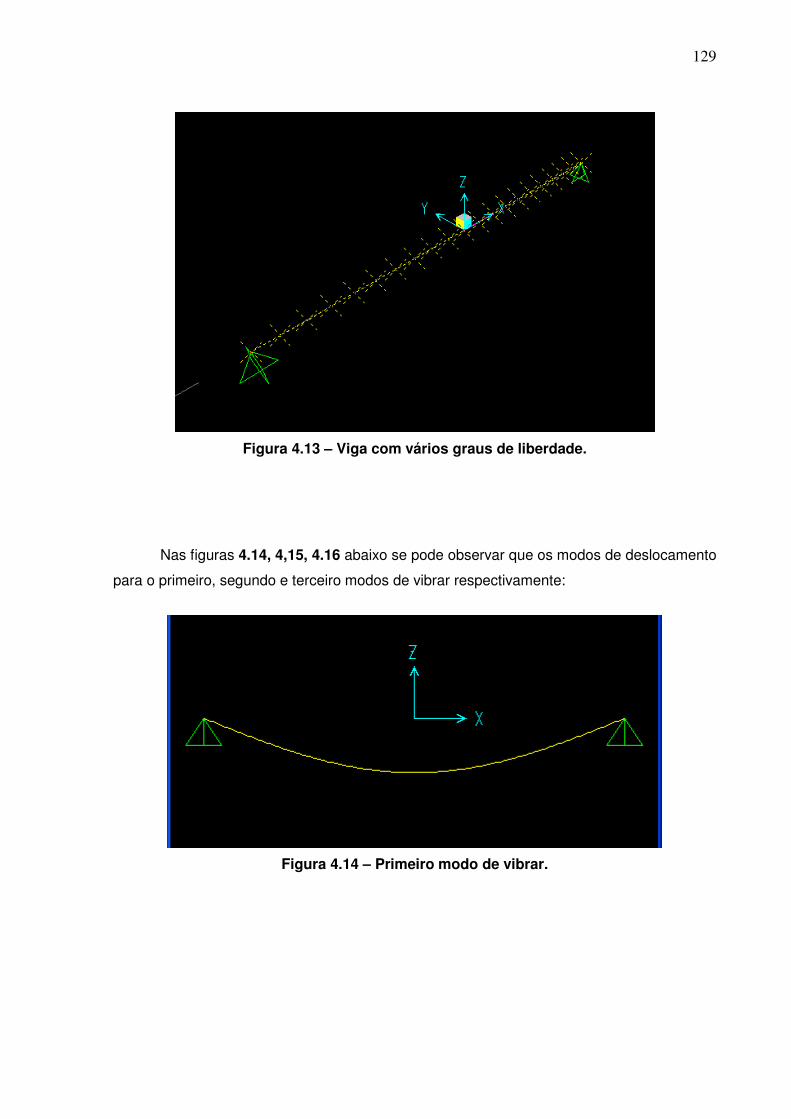
129
Figura 4.13 – Viga com vários graus de liberdade.
Nas figuras 4.14, 4,15, 4.16 abaixo se pode observar que os modos de deslocamento
para o primeiro, segundo e terceiro modos de vibrar respectivamente:
Figura 4.14 – Primeiro modo de vibrar.
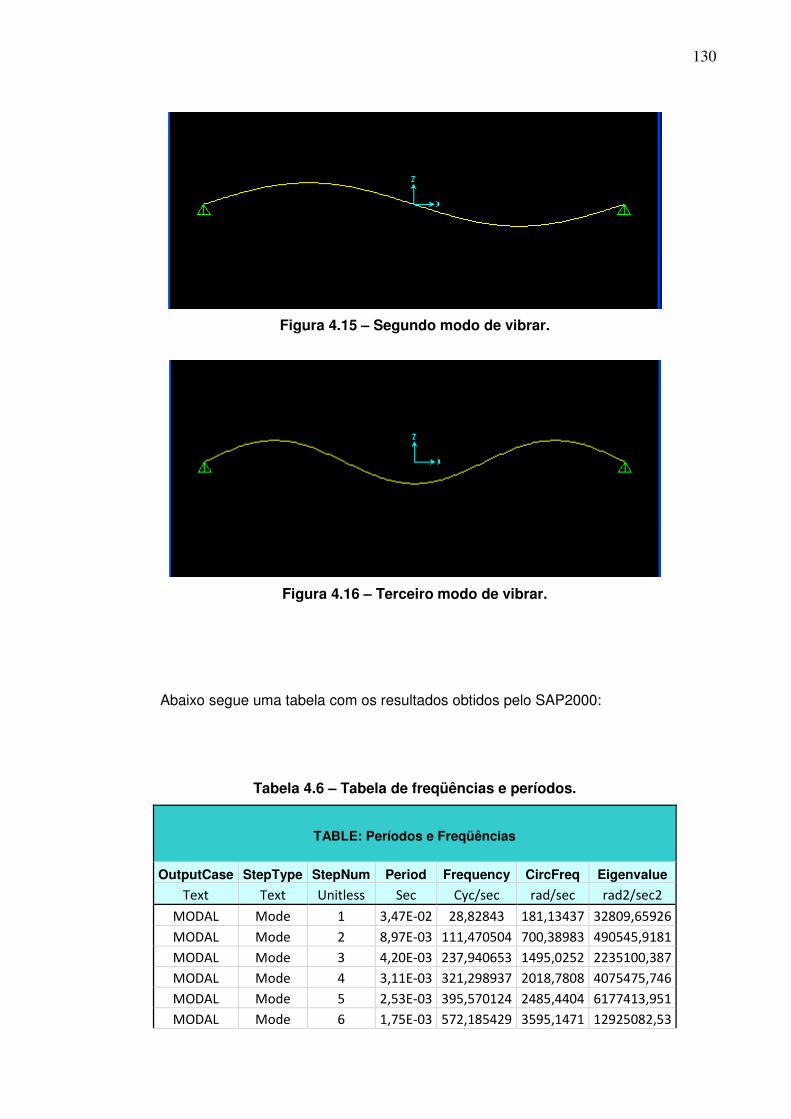
130
Figura 4.15 – Segundo modo de vibrar.
Figura 4.16 – Terceiro modo de vibrar.
Abaixo segue uma tabela com os resultados obtidos pelo SAP2000:
Tabela 4.6 – Tabela de freqüências e períodos.
TABLE: Períodos e Freqüências
OutputCase StepType StepNum Period Frequency CircFreq Eigenvalue
Text Text Unitless Sec Cyc/sec rad/sec rad2/sec2
MODAL Mode 1 3,47E-02 28,82843 181,13437 32809,65926
MODAL Mode 2 8,97E-03 111,470504 700,38983 490545,9181
MODAL Mode 3 4,20E-03 237,940653 1495,0252 2235100,387
MODAL Mode 4 3,11E-03 321,298937 2018,7808 4075475,746
MODAL Mode 5 2,53E-03 395,570124 2485,4404 6177413,951
MODAL Mode 6 1,75E-03 572,185429 3595,1471 12925082,53
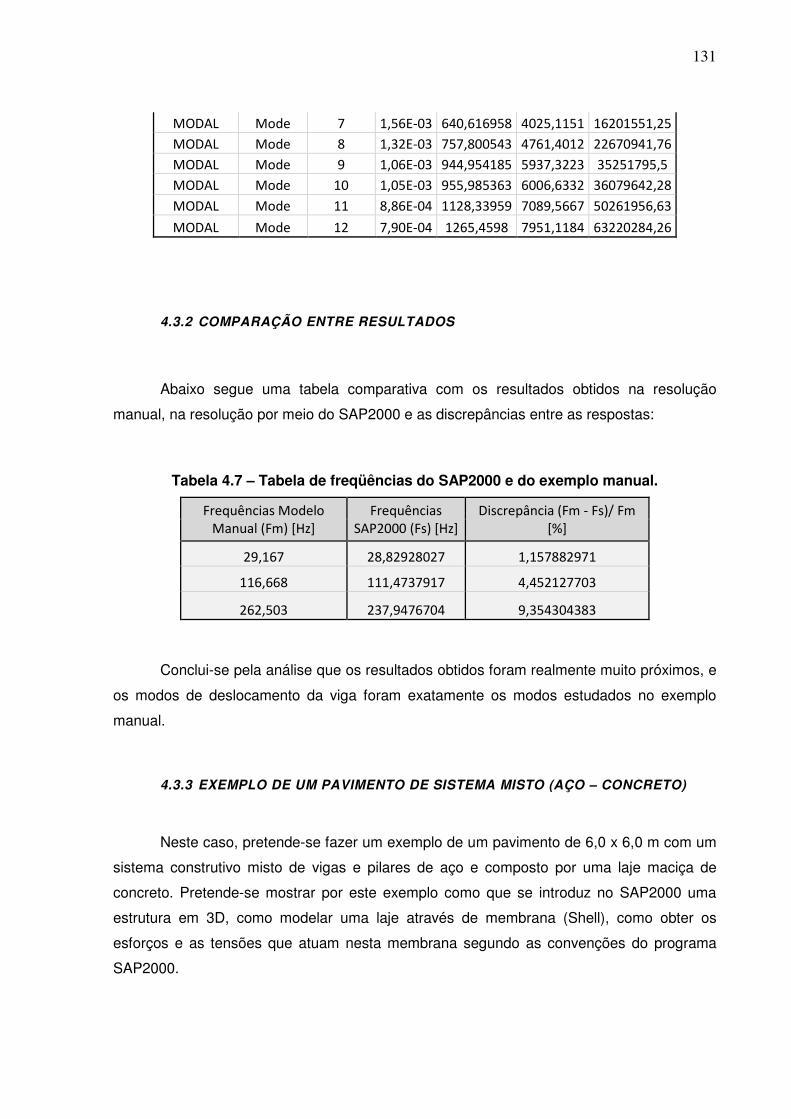
131
MODAL Mode 7 1,56E-03 640,616958 4025,1151 16201551,25
MODAL Mode 8 1,32E-03 757,800543 4761,4012 22670941,76
MODAL Mode 9 1,06E-03 944,954185 5937,3223 35251795,5
MODAL Mode 10 1,05E-03 955,985363 6006,6332 36079642,28
MODAL Mode 11 8,86E-04 1128,33959 7089,5667 50261956,63
MODAL Mode 12 7,90E-04 1265,4598 7951,1184 63220284,26
4.3.2 COMPARAÇÃO ENTRE RESULTADOS
Abaixo segue uma tabela comparativa com os resultados obtidos na resolução
manual, na resolução por meio do SAP2000 e as discrepâncias entre as respostas:
Tabela 4.7 – Tabela de freqüências do SAP2000 e do exemplo manual.
Frequências Modelo
Manual (Fm) [Hz]
Frequências
SAP2000 (Fs) [Hz]
Discrepância (Fm - Fs)/ Fm
[%]
29,167 28,82928027 1,157882971
116,668 111,4737917 4,452127703
262,503 237,9476704 9,354304383
Conclui-se pela análise que os resultados obtidos foram realmente muito próximos, e
os modos de deslocamento da viga foram exatamente os modos estudados no exemplo
manual.
4.3.3 EXEMPLO DE UM PAVIMENTO DE SISTEMA MISTO (AÇO – CONCRETO)
Neste caso, pretende-se fazer um exemplo de um pavimento de 6,0 x 6,0 m com um
sistema construtivo misto de vigas e pilares de aço e composto por uma laje maciça de
concreto. Pretende-se mostrar por este exemplo como que se introduz no SAP2000 uma
estrutura em 3D, como modelar uma laje através de membrana (Shell), como obter os
esforços e as tensões que atuam nesta membrana segundo as convenções do programa
SAP2000.
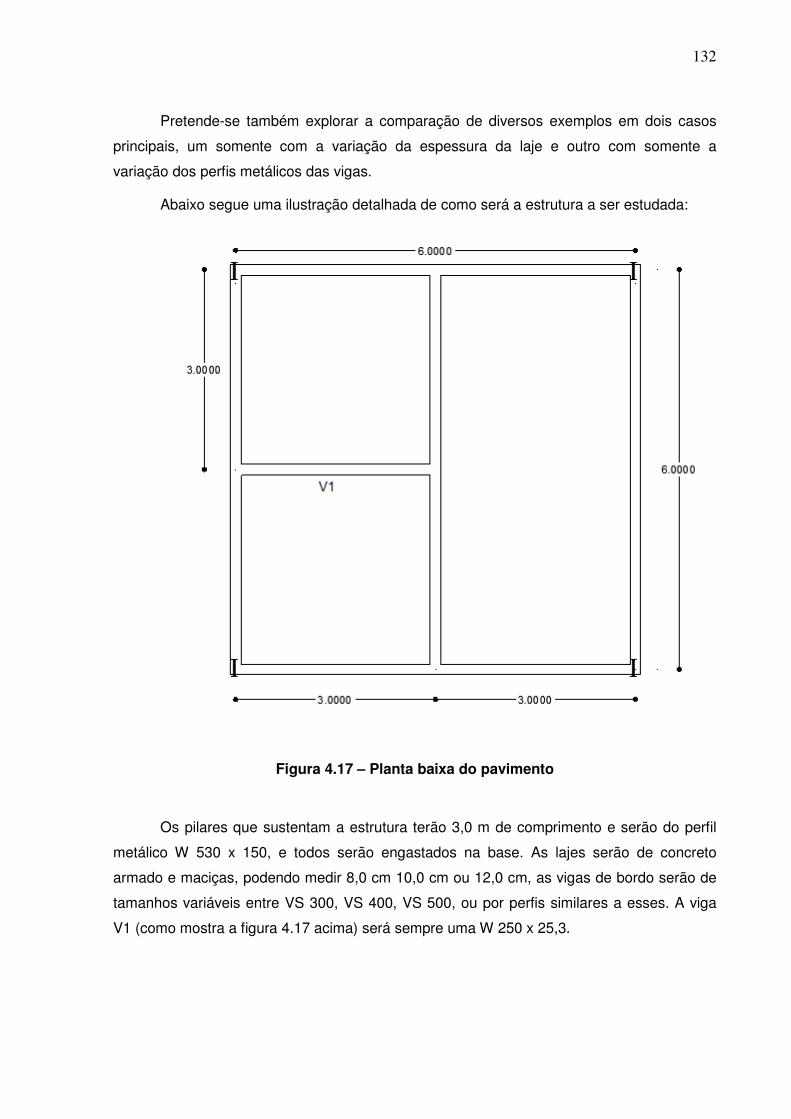
132
Pretende-se também explorar a comparação de diversos exemplos em dois casos
principais, um somente com a variação da espessura da laje e outro com somente a
variação dos perfis metálicos das vigas.
Abaixo segue uma ilustração detalhada de como será a estrutura a ser estudada:
Figura 4.17 – Planta baixa do pavimento
Os pilares que sustentam a estrutura terão 3,0 m de comprimento e serão do perfil
metálico W 530 x 150, e todos serão engastados na base. As lajes serão de concreto
armado e maciças, podendo medir 8,0 cm 10,0 cm ou 12,0 cm, as vigas de bordo serão de
tamanhos variáveis entre VS 300, VS 400, VS 500, ou por perfis similares a esses. A viga
V1 (como mostra a figura 4.17 acima) será sempre uma W 250 x 25,3.
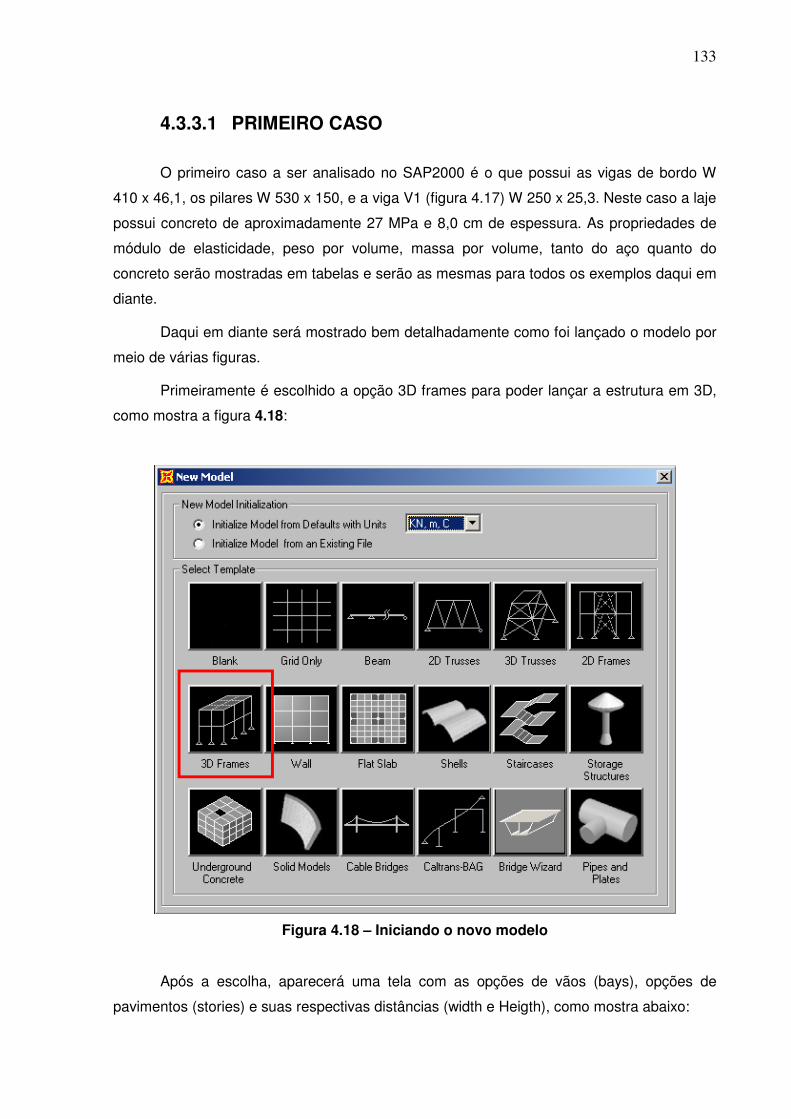
133
4.3.3.1 PRIMEIRO CASO
O primeiro caso a ser analisado no SAP2000 é o que possui as vigas de bordo W
410 x 46,1, os pilares W 530 x 150, e a viga V1 (figura 4.17) W 250 x 25,3. Neste caso a laje
possui concreto de aproximadamente 27 MPa e 8,0 cm de espessura. As propriedades de
módulo de elasticidade, peso por volume, massa por volume, tanto do aço quanto do
concreto serão mostradas em tabelas e serão as mesmas para todos os exemplos daqui em
diante.
Daqui em diante será mostrado bem detalhadamente como foi lançado o modelo por
meio de várias figuras.
Primeiramente é escolhido a opção 3D frames para poder lançar a estrutura em 3D,
como mostra a figura 4.18:
Figura 4.18 – Iniciando o novo modelo
Após a escolha, aparecerá uma tela com as opções de vãos (bays), opções de
pavimentos (stories) e suas respectivas distâncias (width e Heigth), como mostra abaixo:
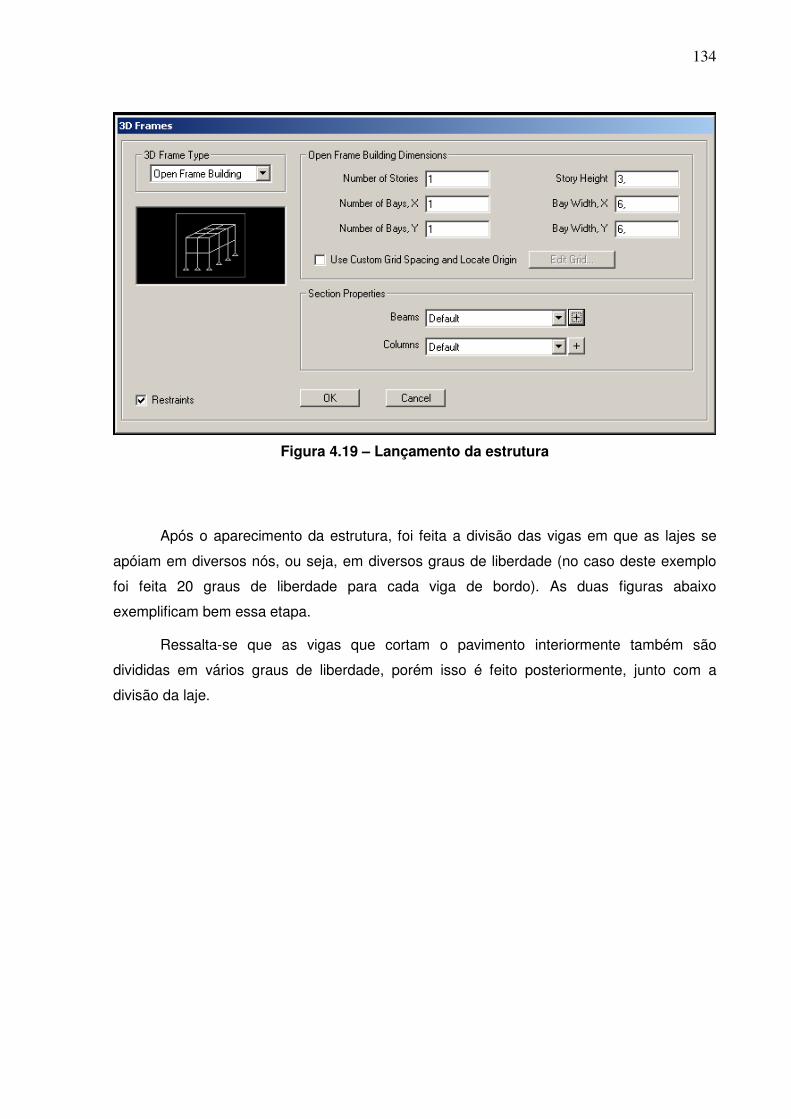
134
Figura 4.19 – Lançamento da estrutura
Após o aparecimento da estrutura, foi feita a divisão das vigas em que as lajes se
apóiam em diversos nós, ou seja, em diversos graus de liberdade (no caso deste exemplo
foi feita 20 graus de liberdade para cada viga de bordo). As duas figuras abaixo
exemplificam bem essa etapa.
Ressalta-se que as vigas que cortam o pavimento interiormente também são
divididas em vários graus de liberdade, porém isso é feito posteriormente, junto com a
divisão da laje.
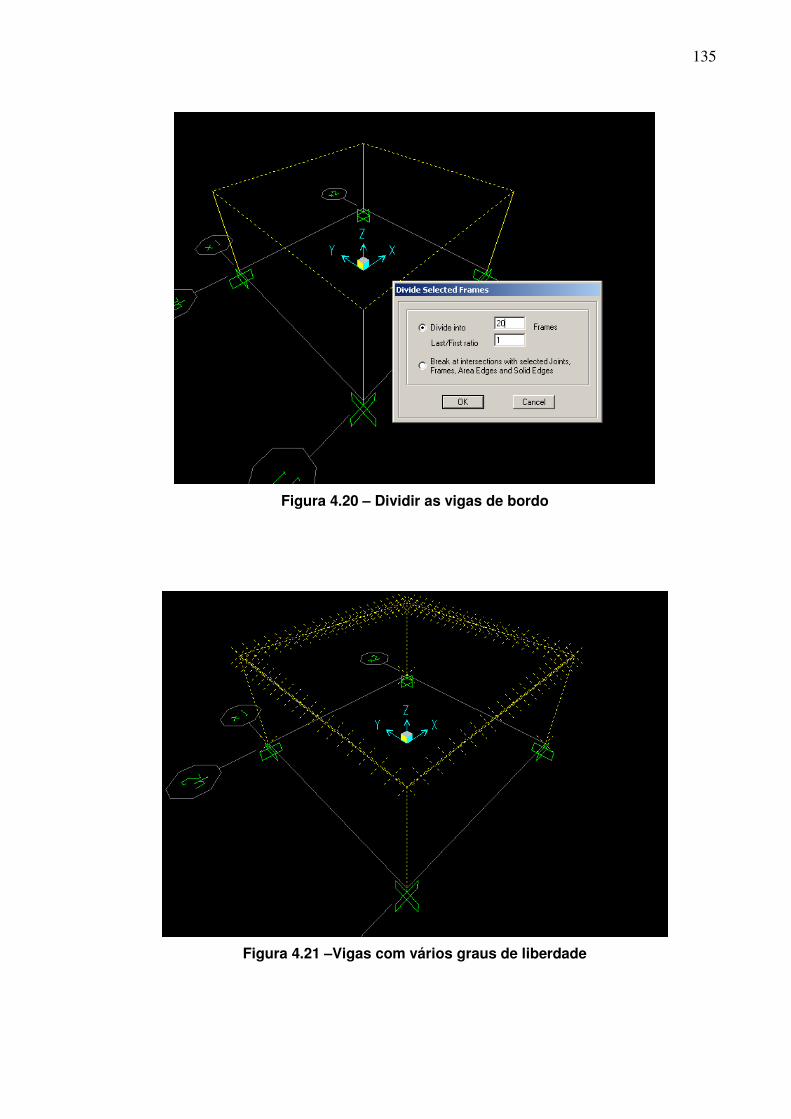
135
Figura 4.20 – Dividir as vigas de bordo
Figura 4.21 –Vigas com vários graus de liberdade
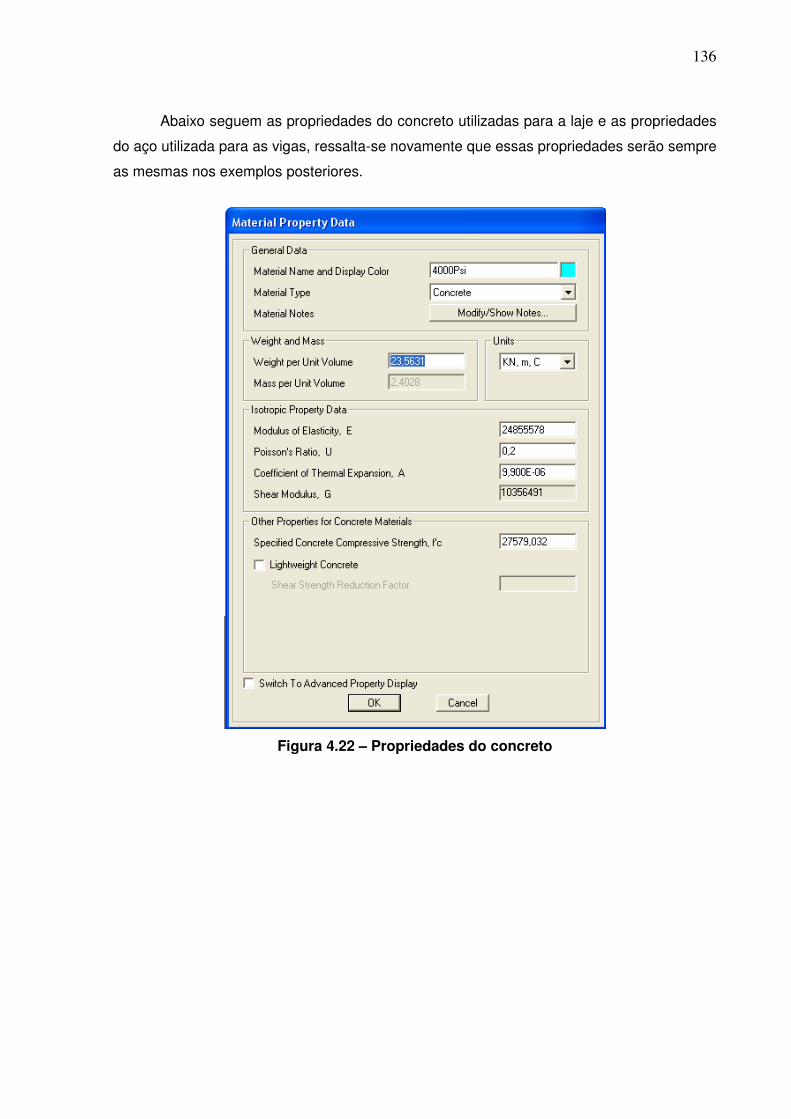
136
Abaixo seguem as propriedades do concreto utilizadas para a laje e as propriedades
do aço utilizada para as vigas, ressalta-se novamente que essas propriedades serão sempre
as mesmas nos exemplos posteriores.
Figura 4.22 – Propriedades do concreto
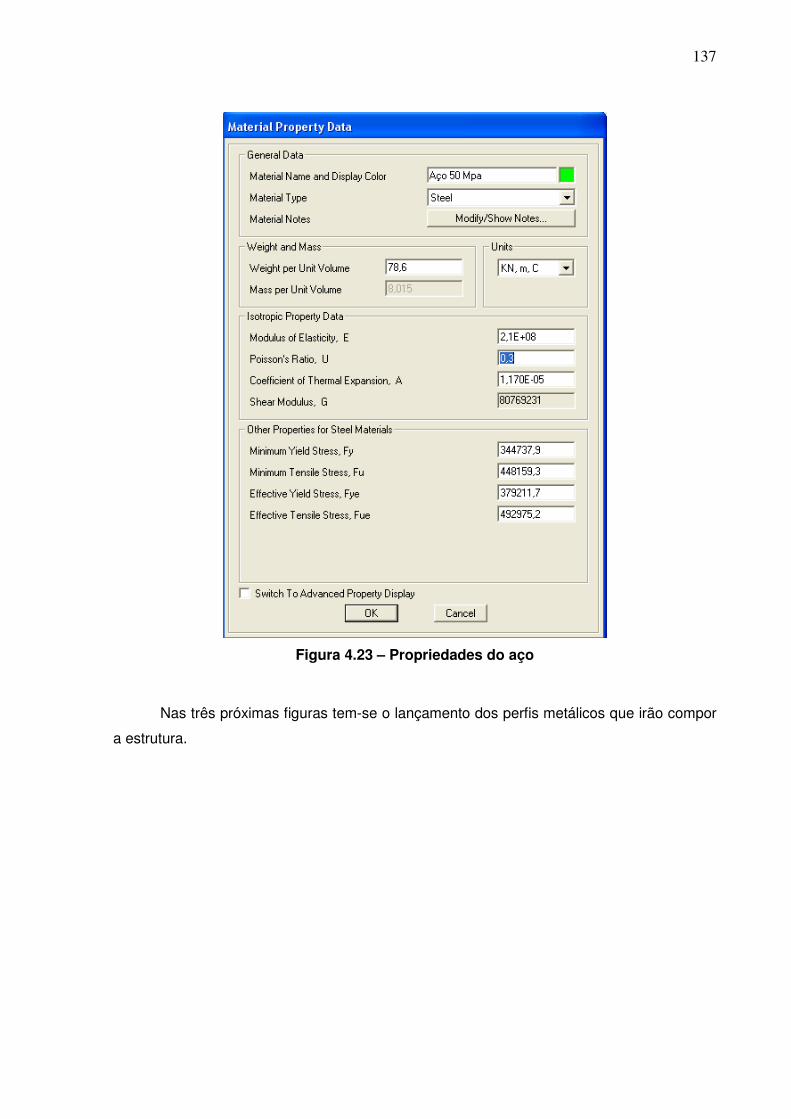
137
Figura 4.23 – Propriedades do aço
Nas três próximas figuras tem-se o lançamento dos perfis metálicos que irão compor
a estrutura.
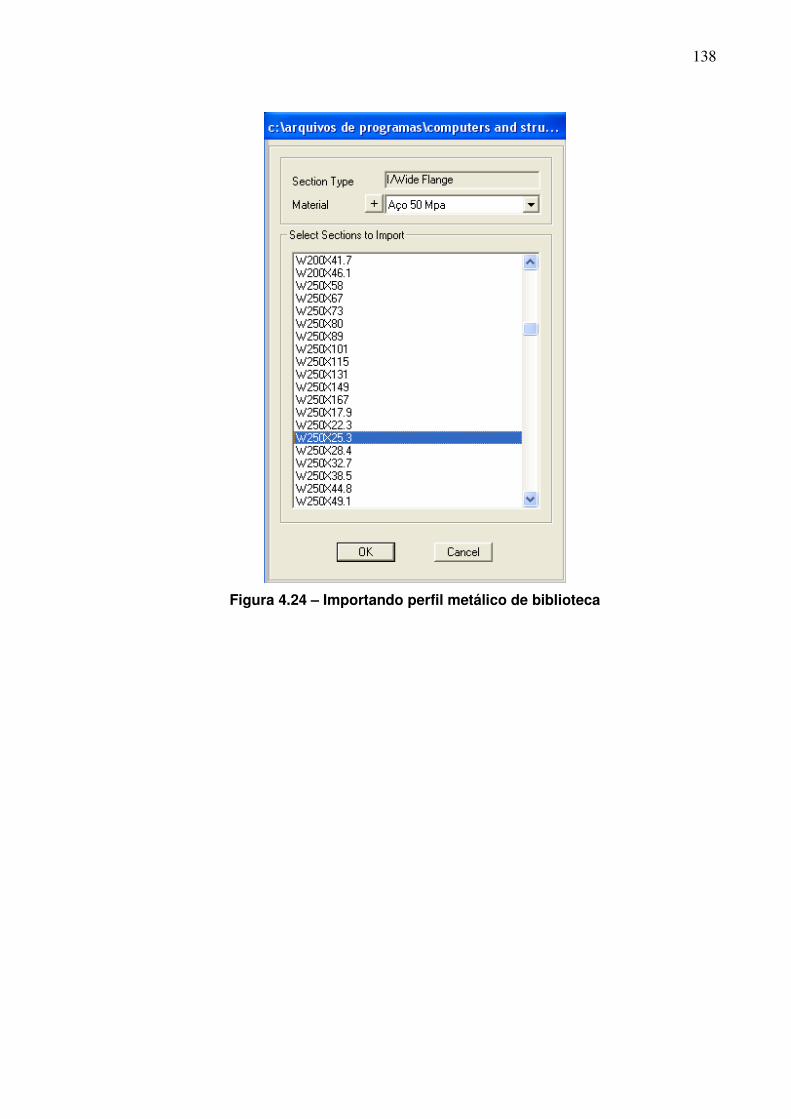
138
Figura 4.24 – Importando perfil metálico de biblioteca
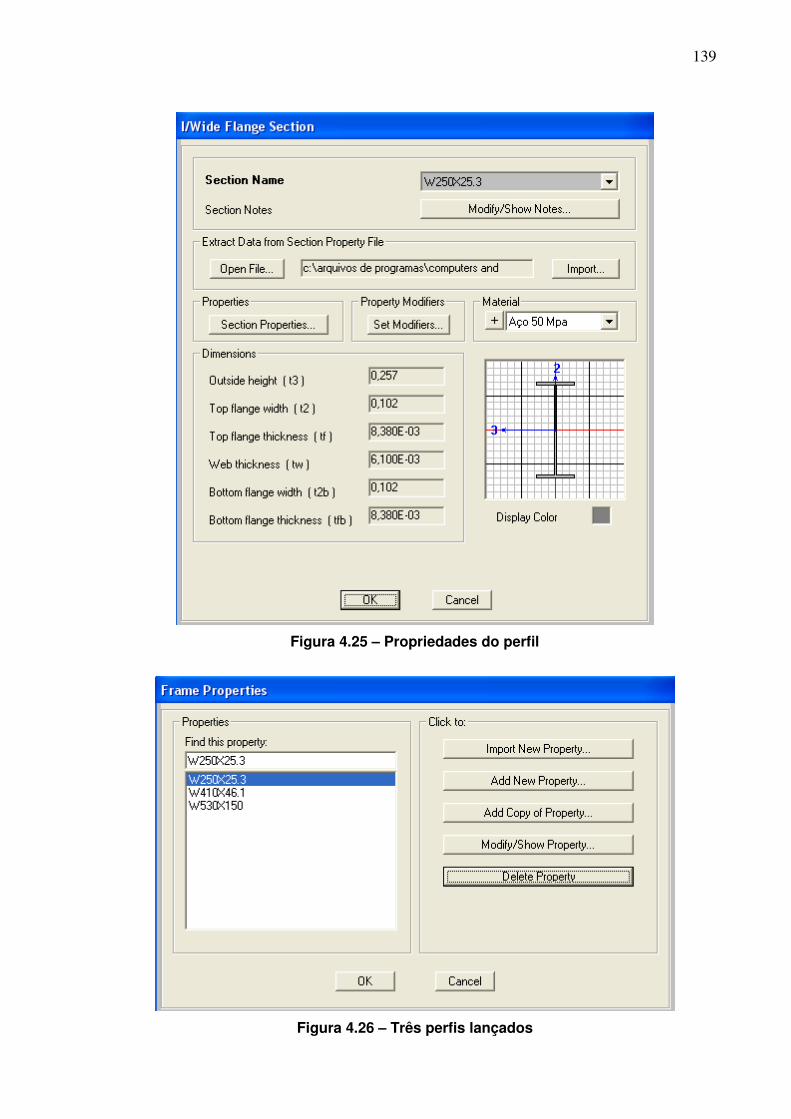
139
Figura 4.25 – Propriedades do perfil
Figura 4.26 – Três perfis lançados
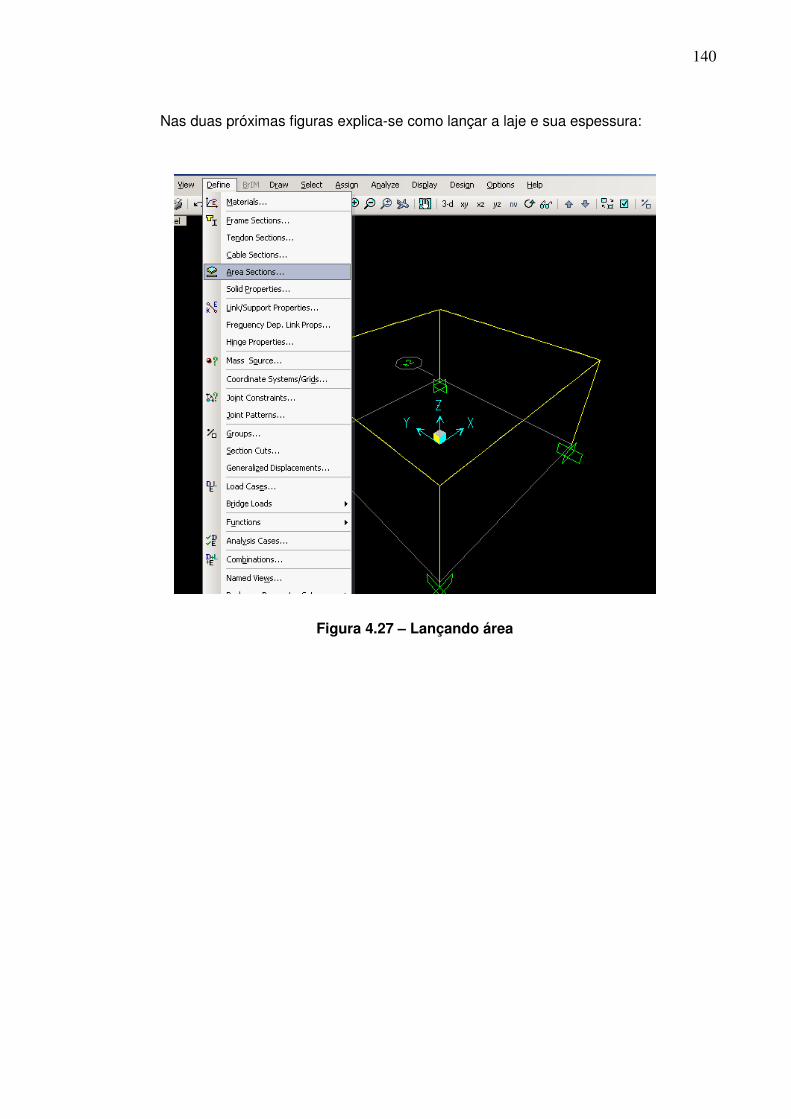
140
Nas duas próximas figuras explica-se como lançar a laje e sua espessura:
Figura 4.27 – Lançando área
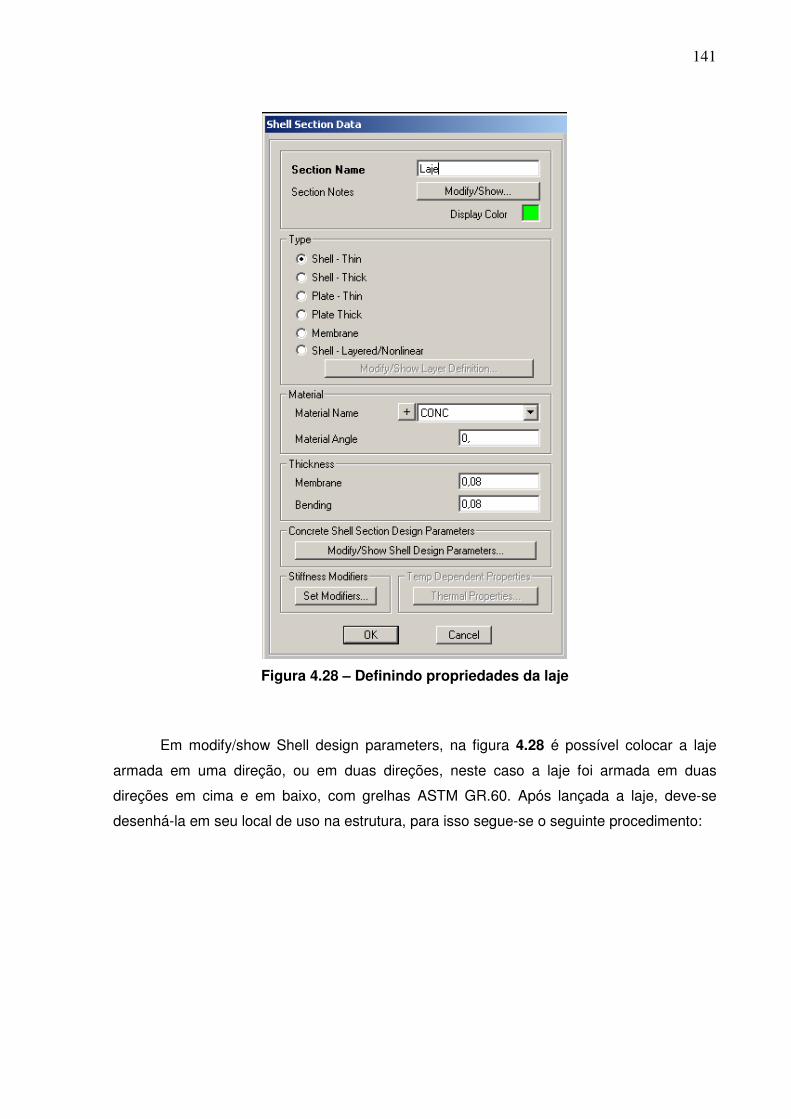
141
Figura 4.28 – Definindo propriedades da laje
Em modify/show Shell design parameters, na figura 4.28 é possível colocar a laje
armada em uma direção, ou em duas direções, neste caso a laje foi armada em duas
direções em cima e em baixo, com grelhas ASTM GR.60. Após lançada a laje, deve-se
desenhá-la em seu local de uso na estrutura, para isso segue-se o seguinte procedimento:
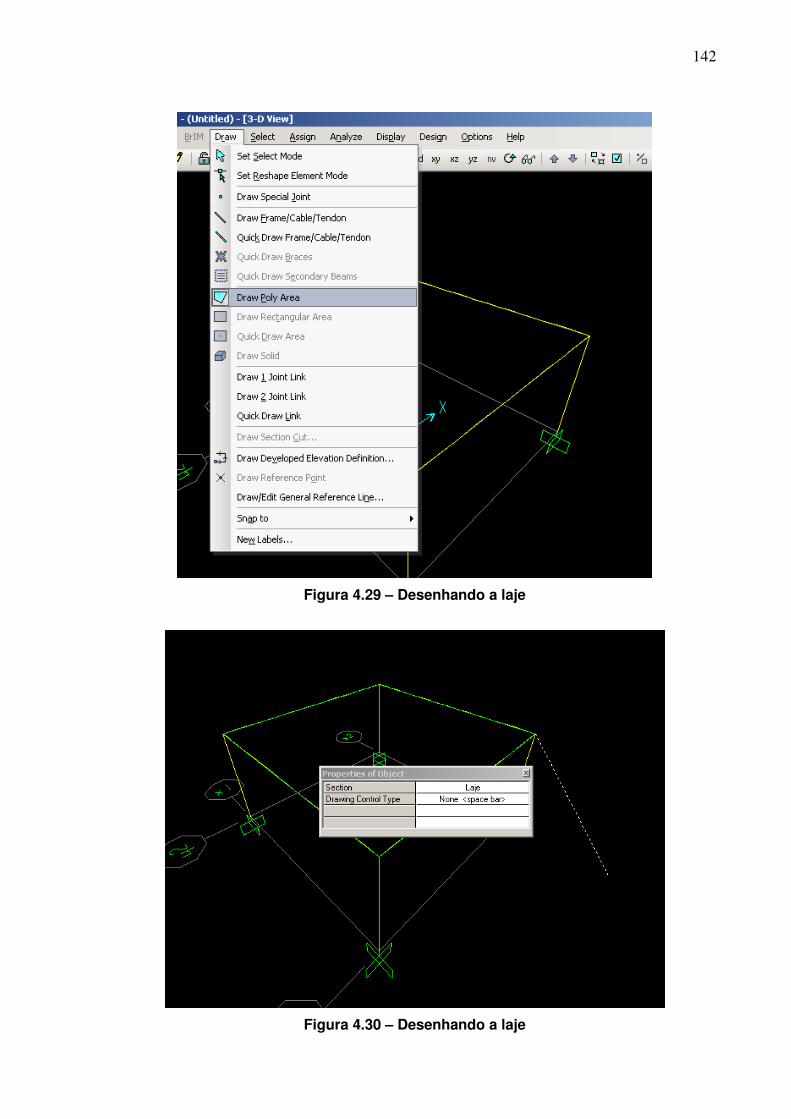
142
Figura 4.29 – Desenhando a laje
Figura 4.30 – Desenhando a laje
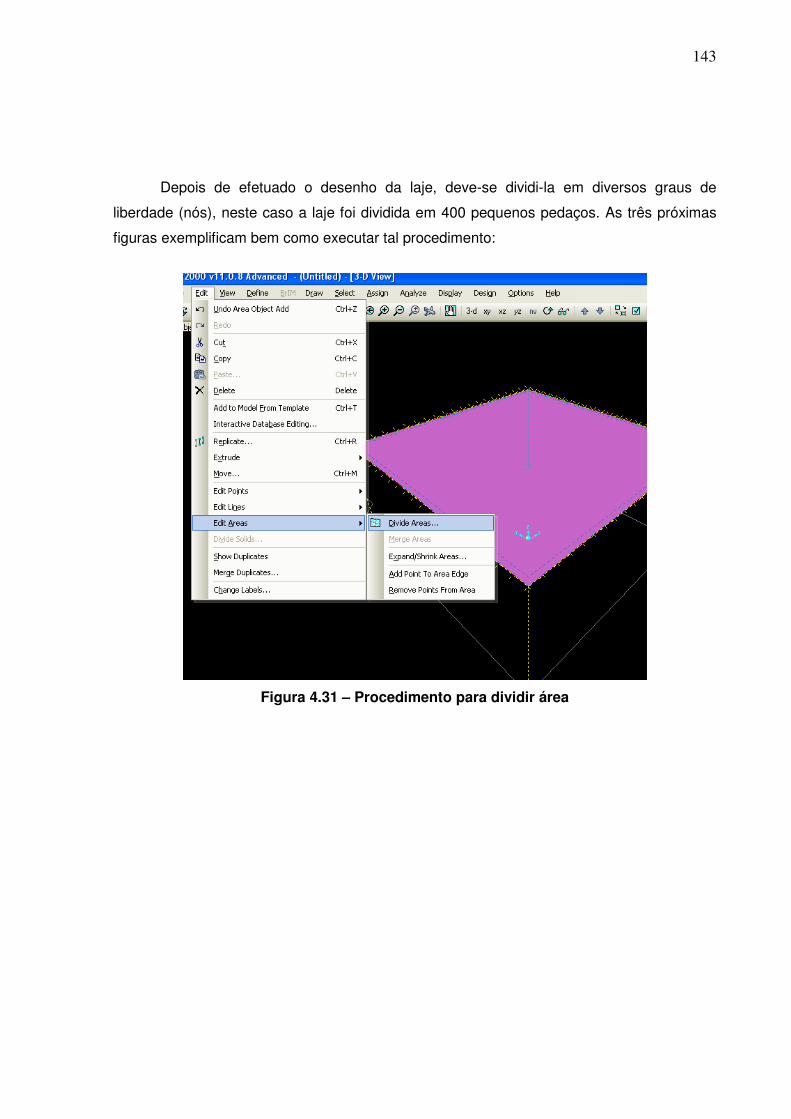
143
Depois de efetuado o desenho da laje, deve-se dividi-la em diversos graus de
liberdade (nós), neste caso a laje foi dividida em 400 pequenos pedaços. As três próximas
figuras exemplificam bem como executar tal procedimento:
Figura 4.31 – Procedimento para dividir área
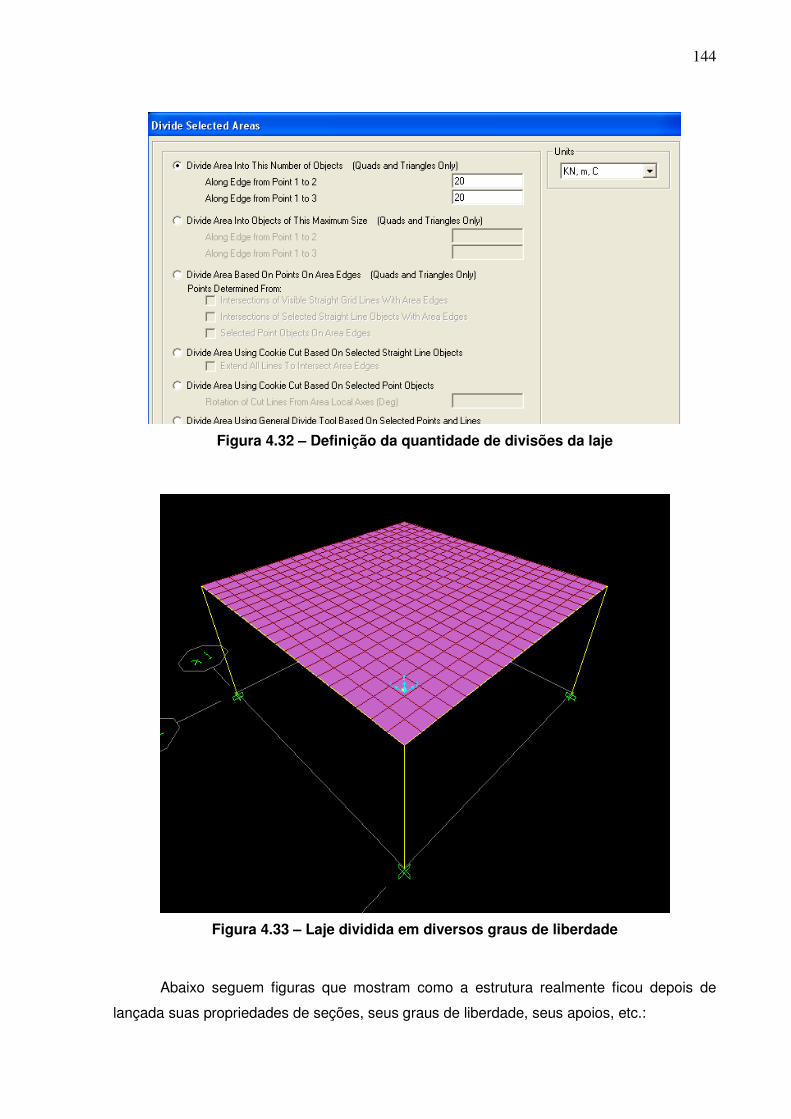
144
Figura 4.32 – Definição da quantidade de divisões da laje
Figura 4.33 – Laje dividida em diversos graus de liberdade
Abaixo seguem figuras que mostram como a estrutura realmente ficou depois de
lançada suas propriedades de seções, seus graus de liberdade, seus apoios, etc.:
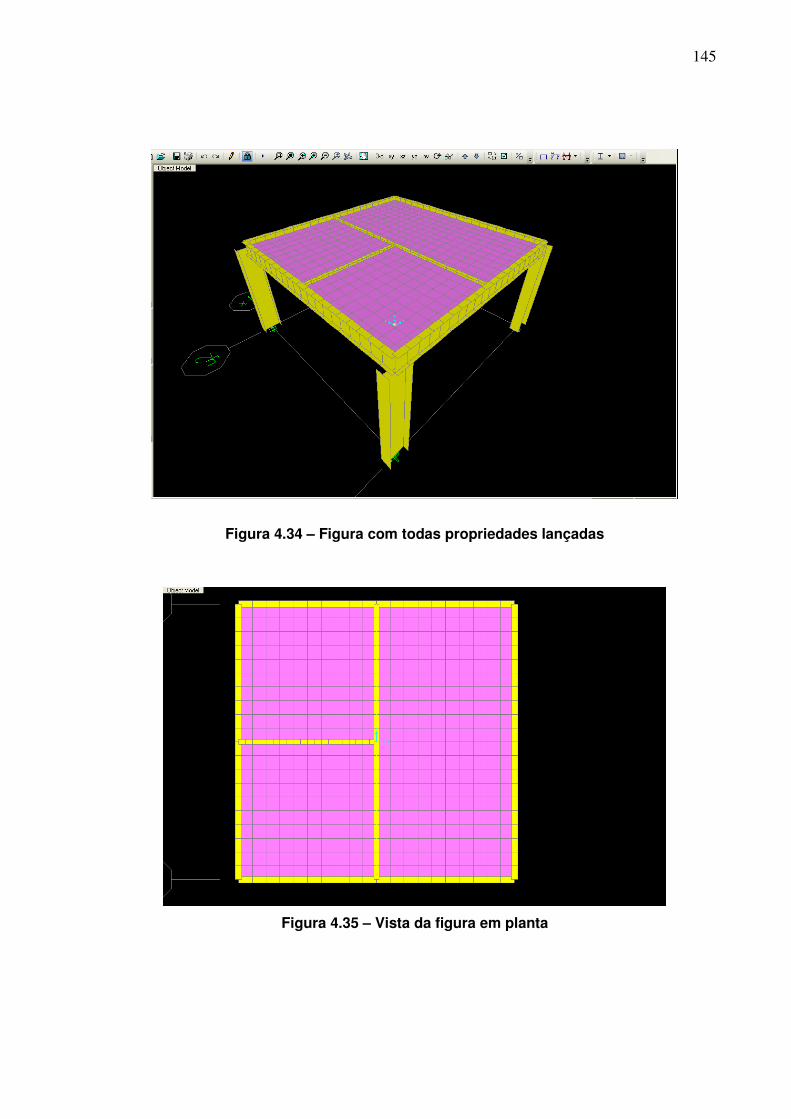
145
Figura 4.34 – Figura com todas propriedades lançadas
Figura 4.35 – Vista da figura em planta
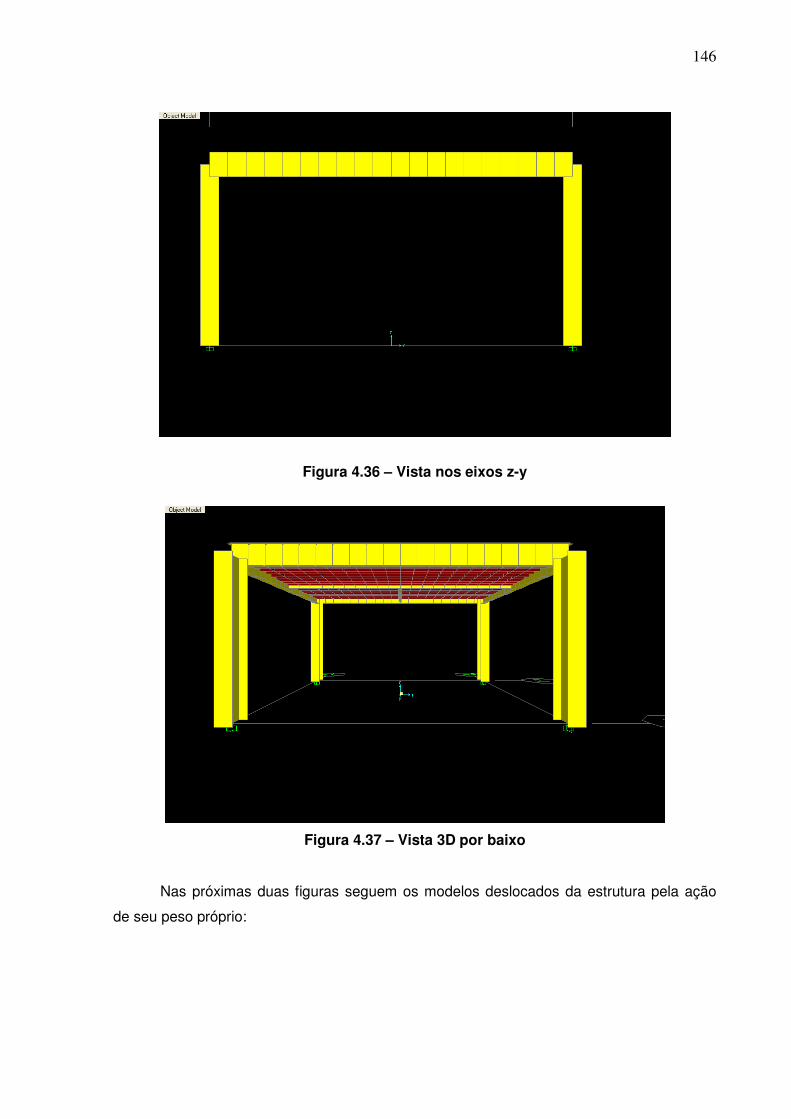
146
Figura 4.36 – Vista nos eixos z-y
Figura 4.37 – Vista 3D por baixo
Nas próximas duas figuras seguem os modelos deslocados da estrutura pela ação
de seu peso próprio:
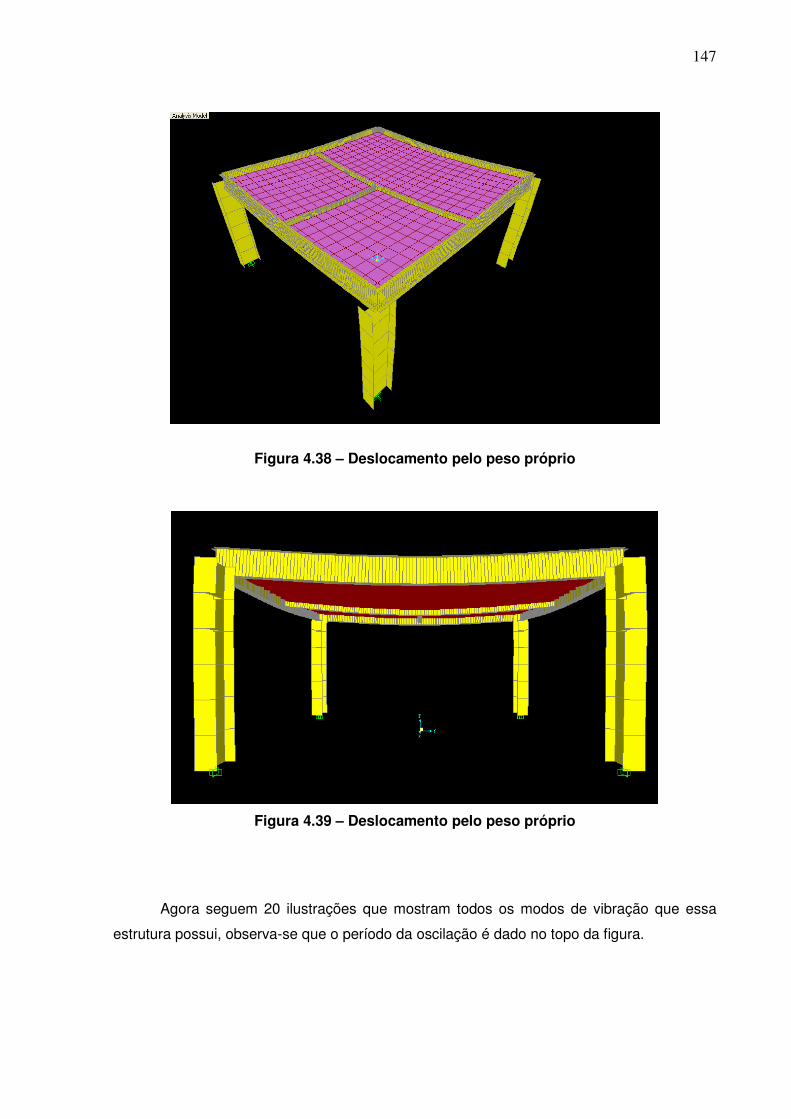
147
Figura 4.38 – Deslocamento pelo peso próprio
Figura 4.39 – Deslocamento pelo peso próprio
Agora seguem 20 ilustrações que mostram todos os modos de vibração que essa
estrutura possui, observa-se que o período da oscilação é dado no topo da figura.
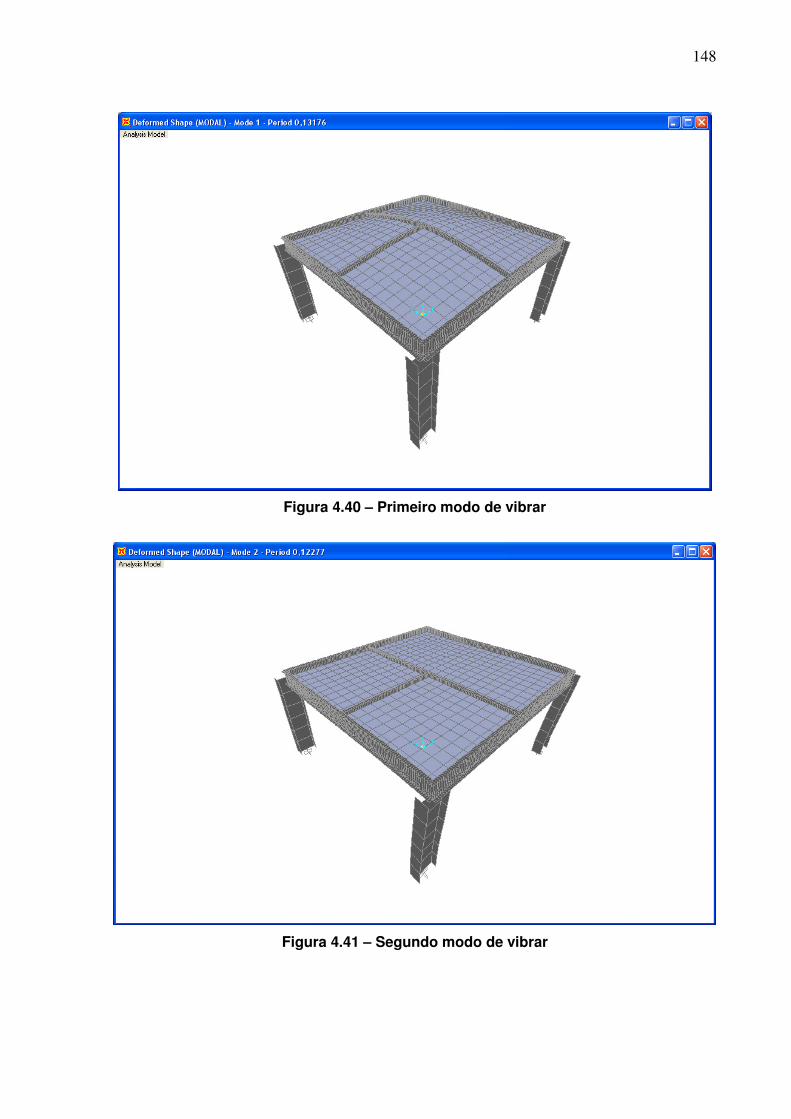
148
Figura 4.40 – Primeiro modo de vibrar
Figura 4.41 – Segundo modo de vibrar
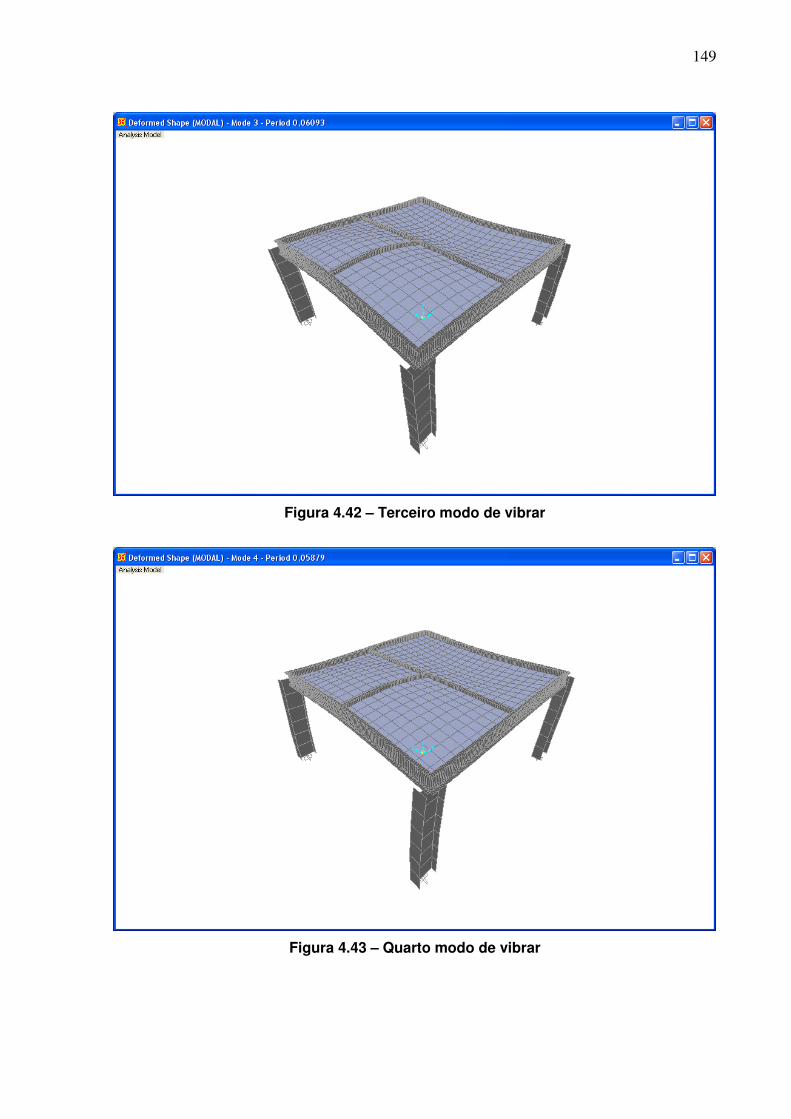
149
Figura 4.42 – Terceiro modo de vibrar
Figura 4.43 – Quarto modo de vibrar
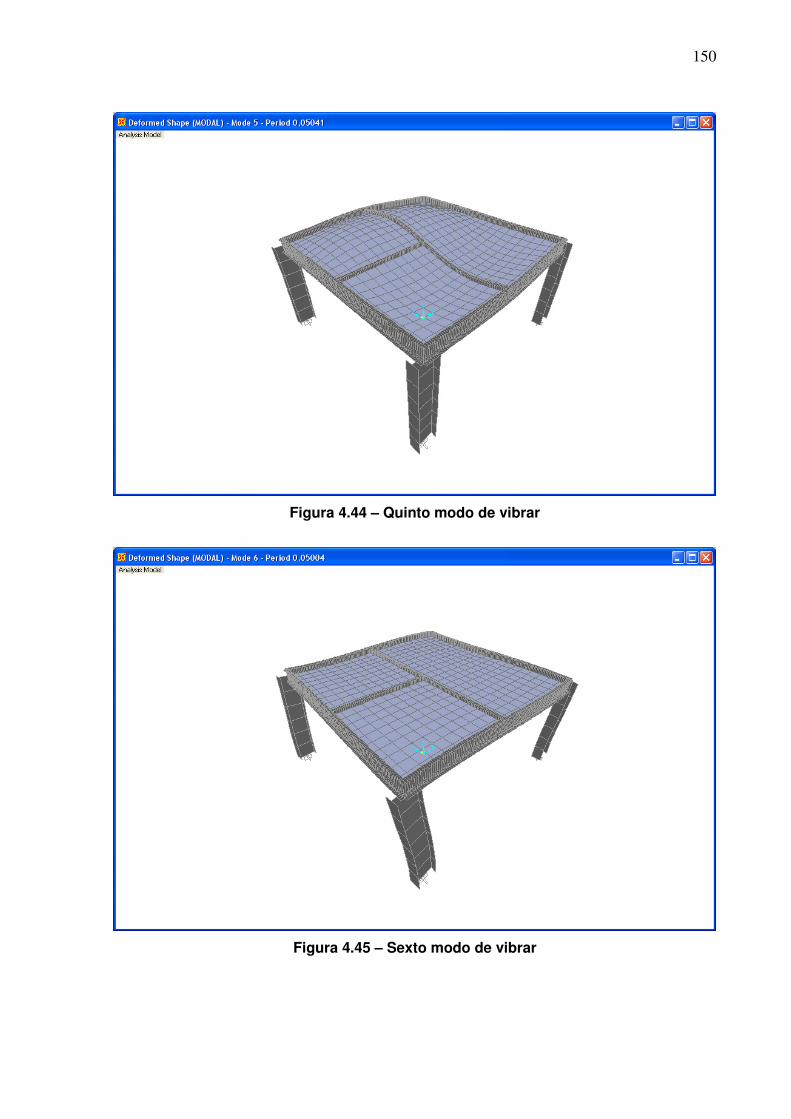
150
Figura 4.44 – Quinto modo de vibrar
Figura 4.45 – Sexto modo de vibrar
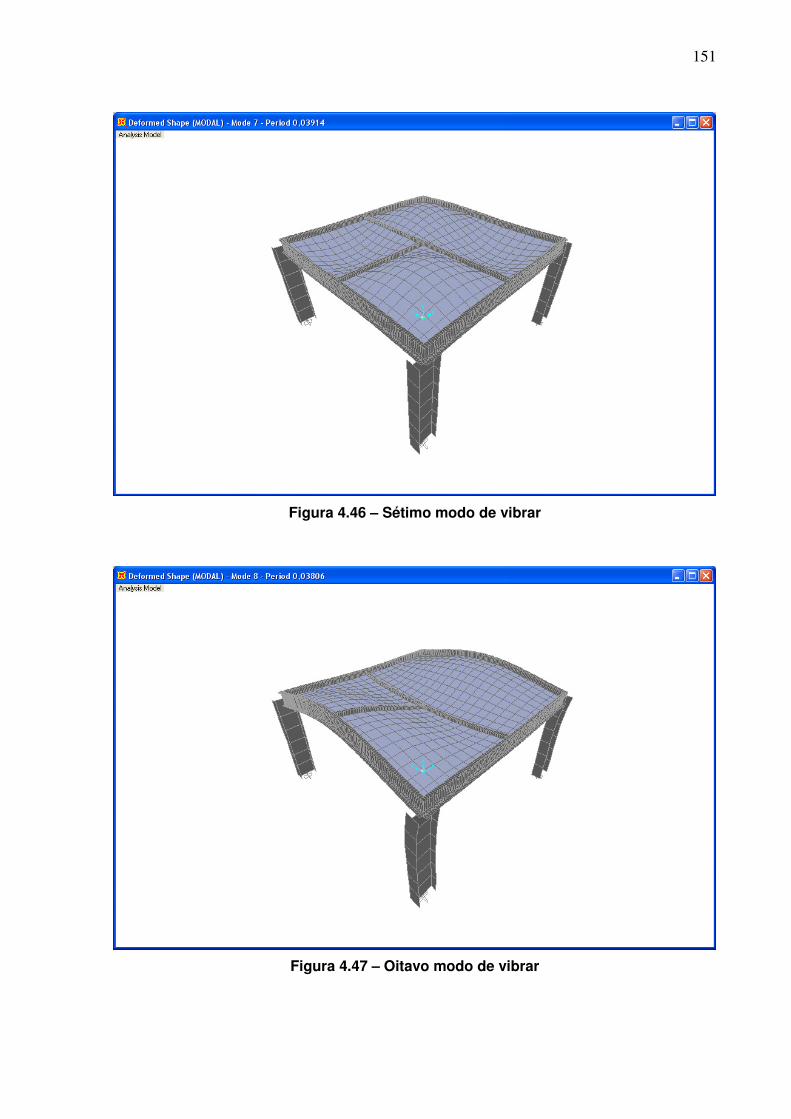
151
Figura 4.46 – Sétimo modo de vibrar
Figura 4.47 – Oitavo modo de vibrar
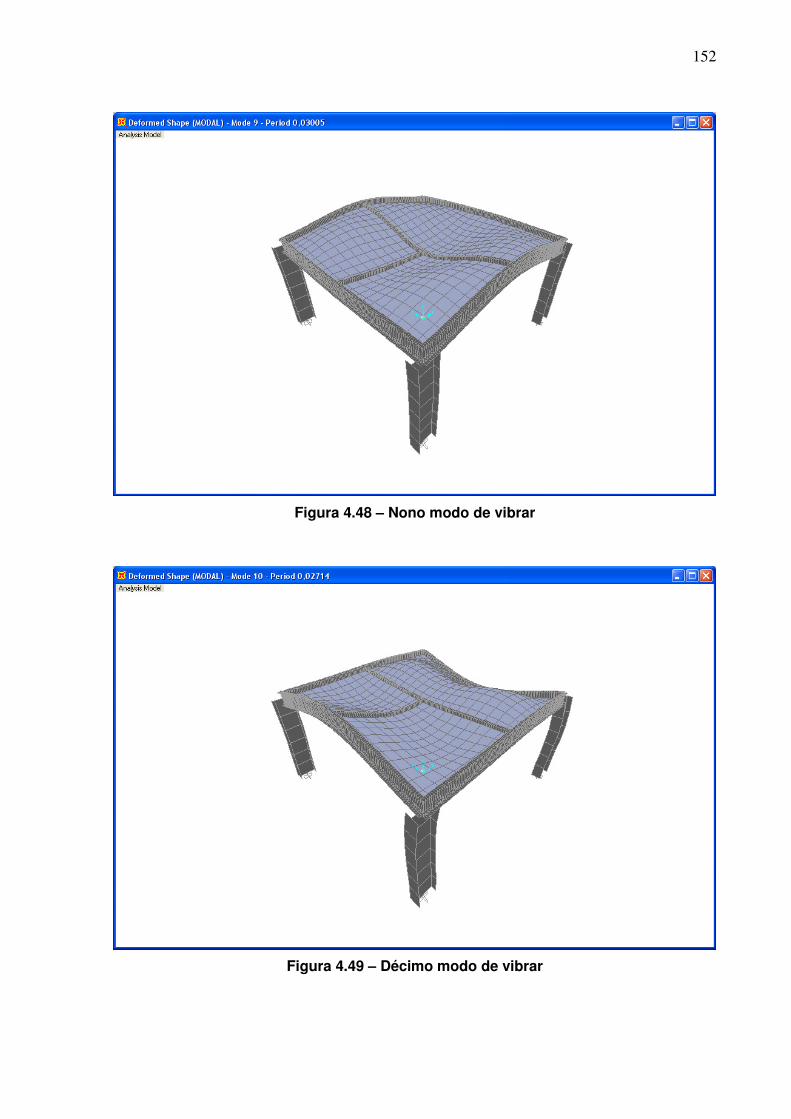
152
Figura 4.48 – Nono modo de vibrar
Figura 4.49 – Décimo modo de vibrar
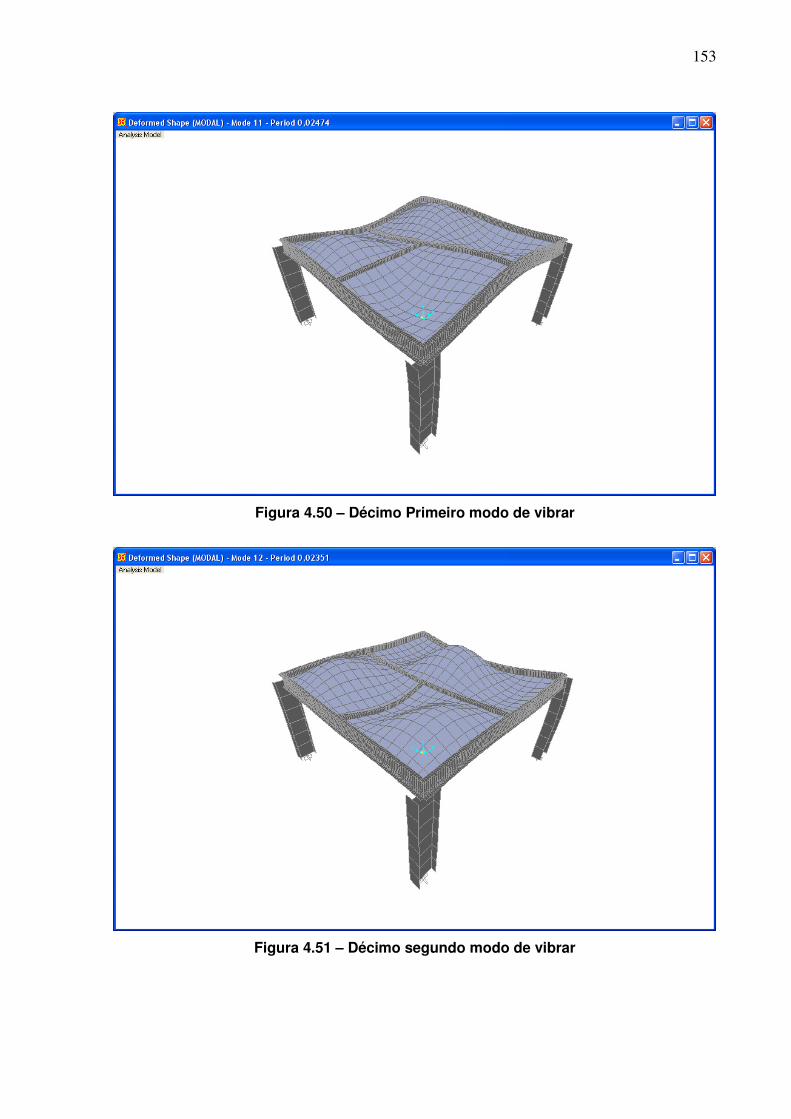
153
Figura 4.50 – Décimo Primeiro modo de vibrar
Figura 4.51 – Décimo segundo modo de vibrar
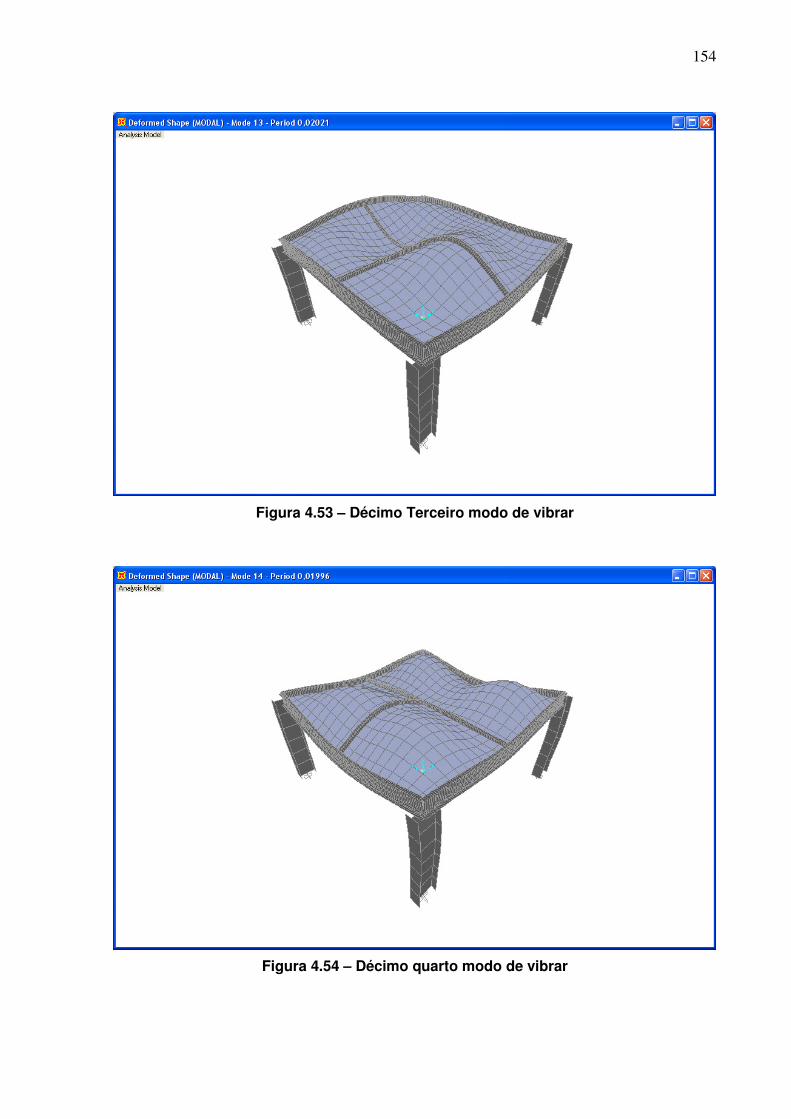
154
Figura 4.53 – Décimo Terceiro modo de vibrar
Figura 4.54 – Décimo quarto modo de vibrar
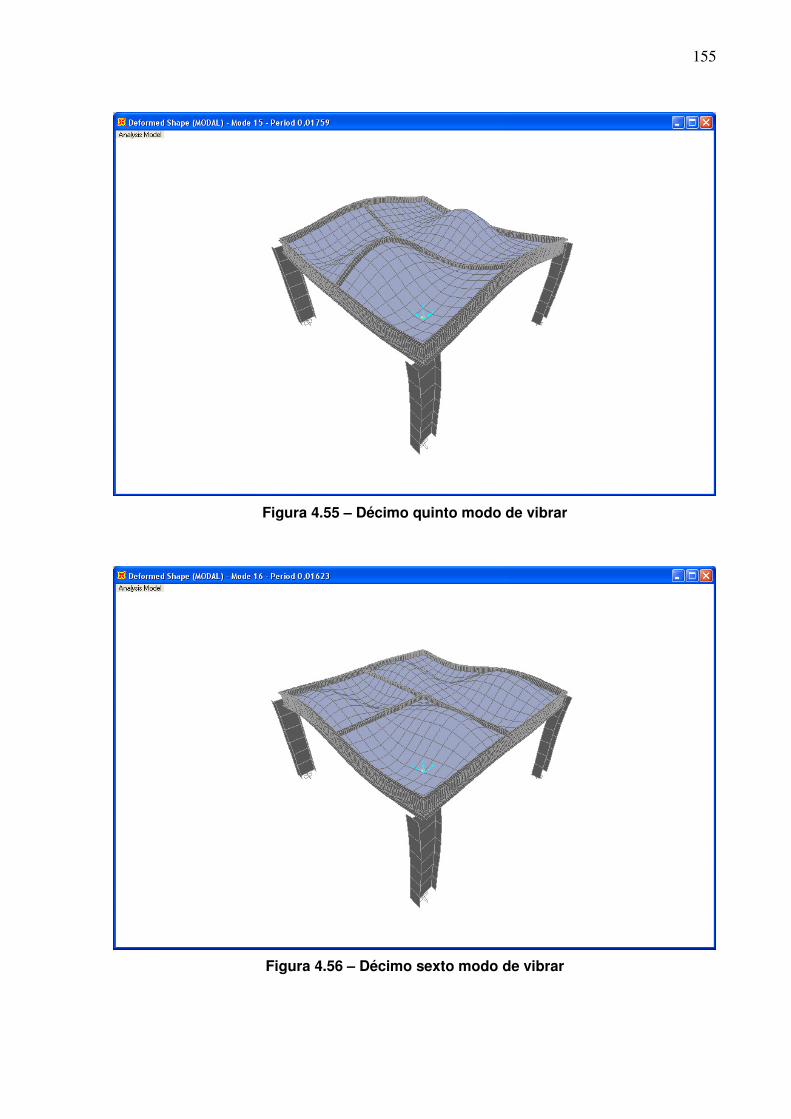
155
Figura 4.55 – Décimo quinto modo de vibrar
Figura 4.56 – Décimo sexto modo de vibrar
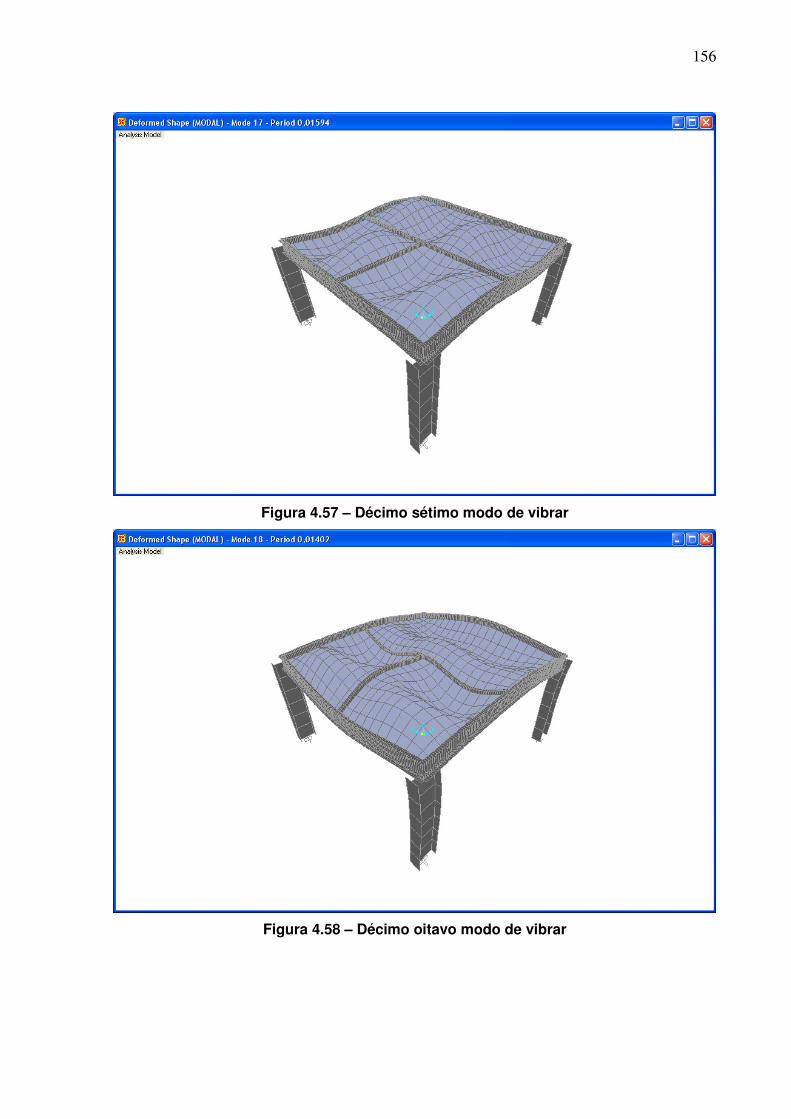
156
Figura 4.57 – Décimo sétimo modo de vibrar
Figura 4.58 – Décimo oitavo modo de vibrar
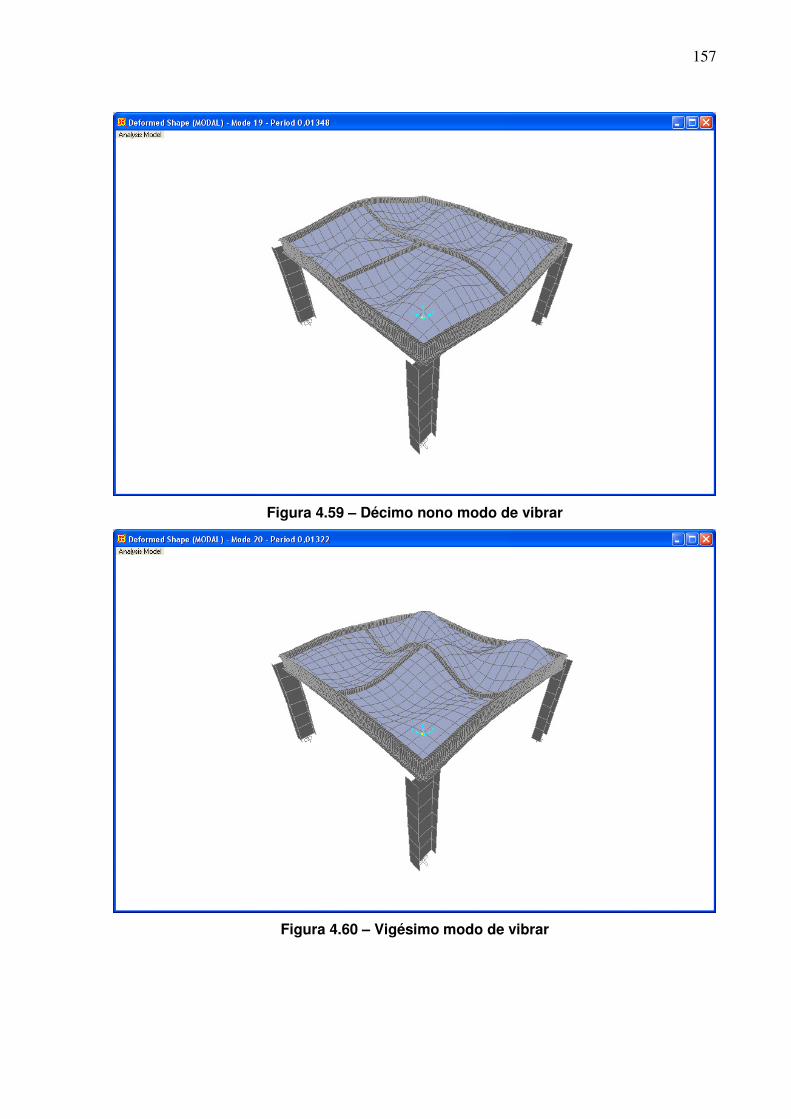
157
Figura 4.59 – Décimo nono modo de vibrar
Figura 4.60 – Vigésimo modo de vibrar
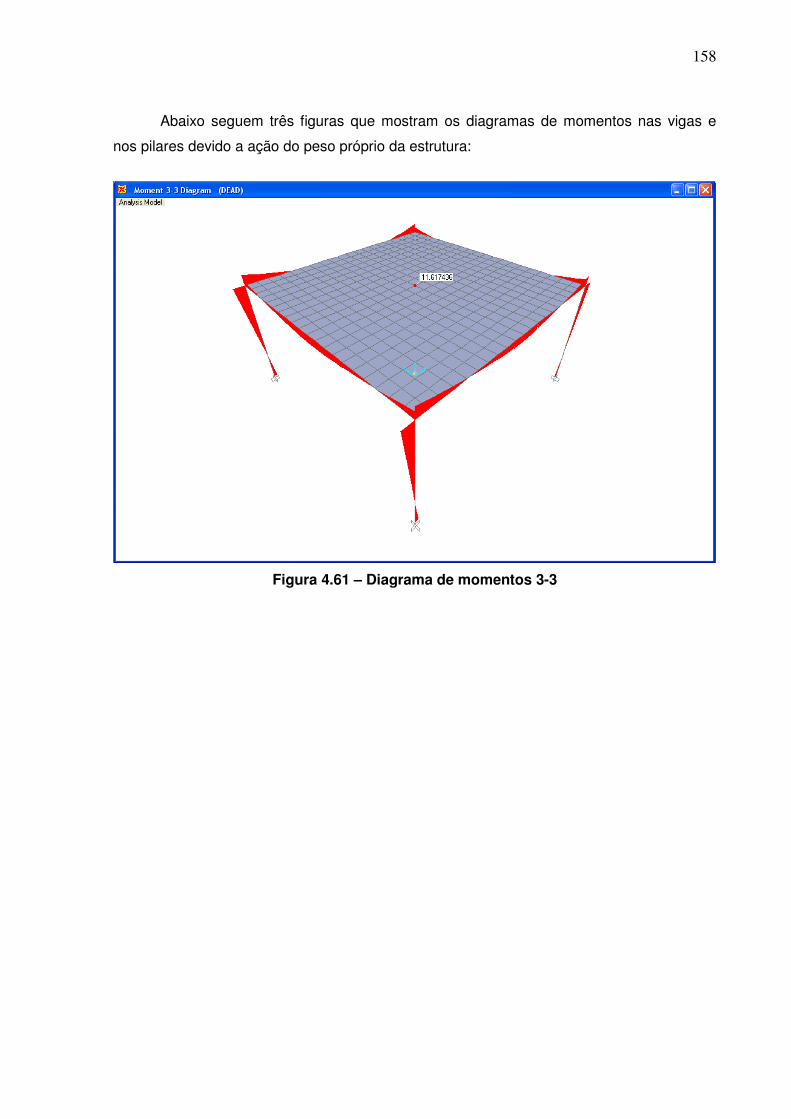
158
Abaixo seguem três figuras que mostram os diagramas de momentos nas vigas e
nos pilares devido a ação do peso próprio da estrutura:
Figura 4.61 – Diagrama de momentos 3-3
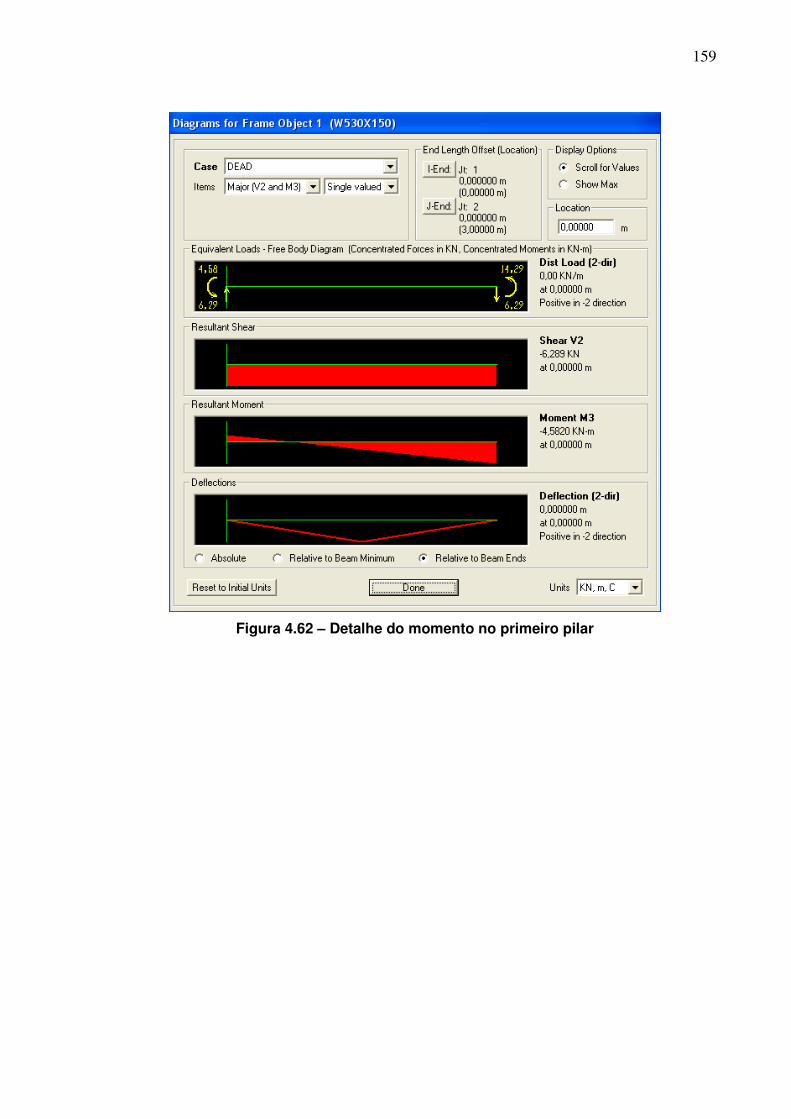
159
Figura 4.62 – Detalhe do momento no primeiro pilar
160
Figura 4.63 – Diagramas de momento 2-2
Antes de colocar as figuras de esforços e tensões na laje, mostra-se as convenções
de cargas e tensões utilizadas pelo SAP2000:
Figura 4.64 – Convenções para as tensões no SAP2000
161
Figura 4.65 – Convenções para os esforços no SAP2000 [SAP2000 (1997) – Analysis
Reference]
Agora sim seguem várias figuras de esforços e tensões na laje (Shell):
Figura 4.66 – Diagrama F11
162
Figura 4.67 – Diagrama F22
Figura 4.68 – Diagrama FMAX
163
Figura 4.69 – Diagrama M11
Figura 4.70 – Diagrama M22
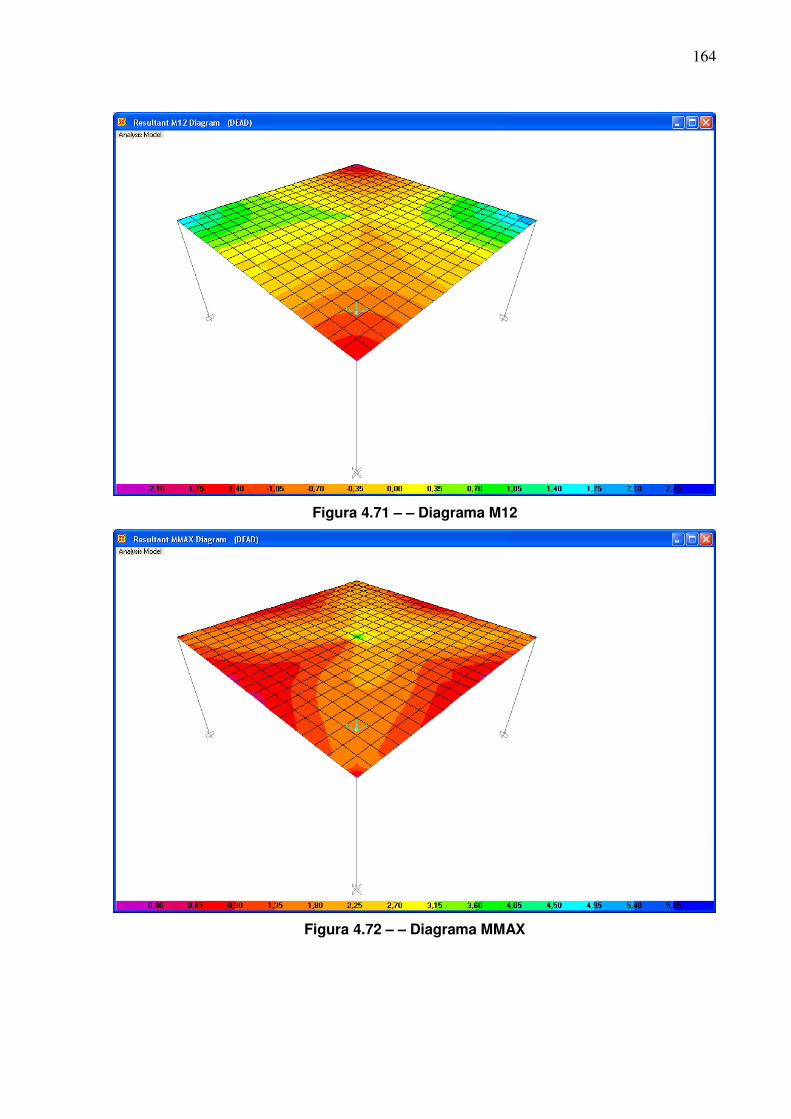
164
Figura 4.71 – – Diagrama M12
Figura 4.72 – – Diagrama MMAX
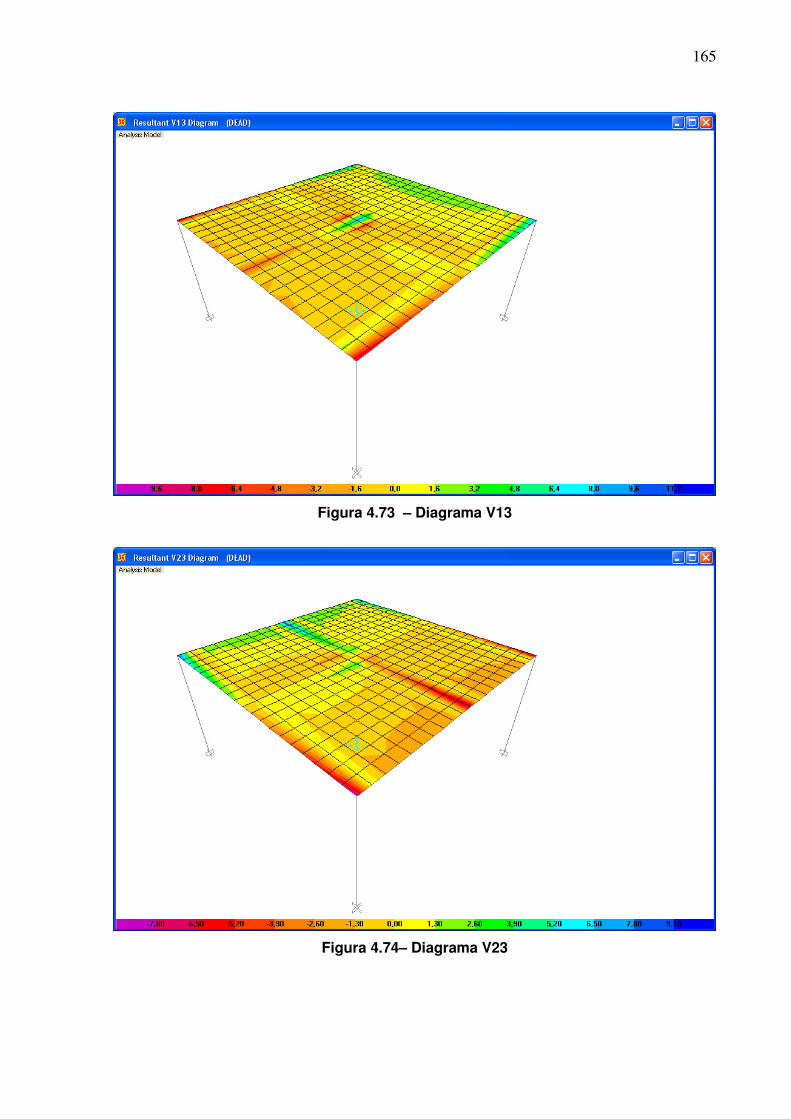
165
Figura 4.73 – Diagrama V13
Figura 4.74– Diagrama V23
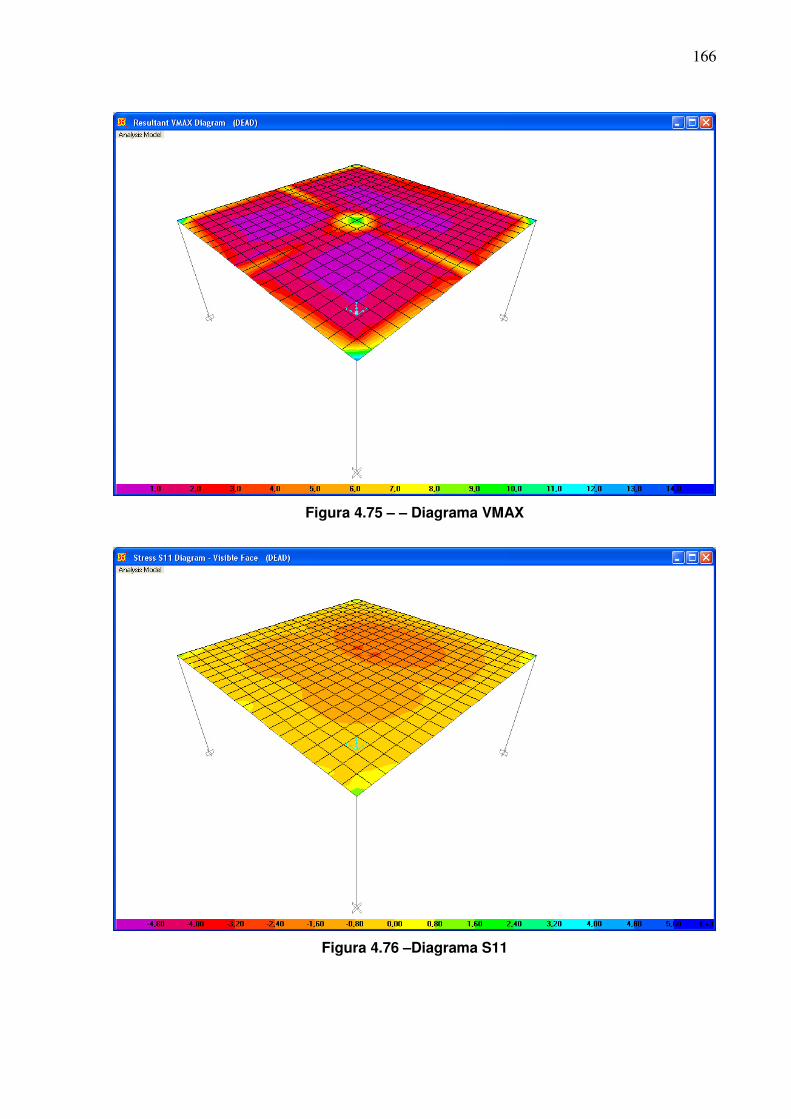
166
Figura 4.75 – – Diagrama VMAX
Figura 4.76 –Diagrama S11
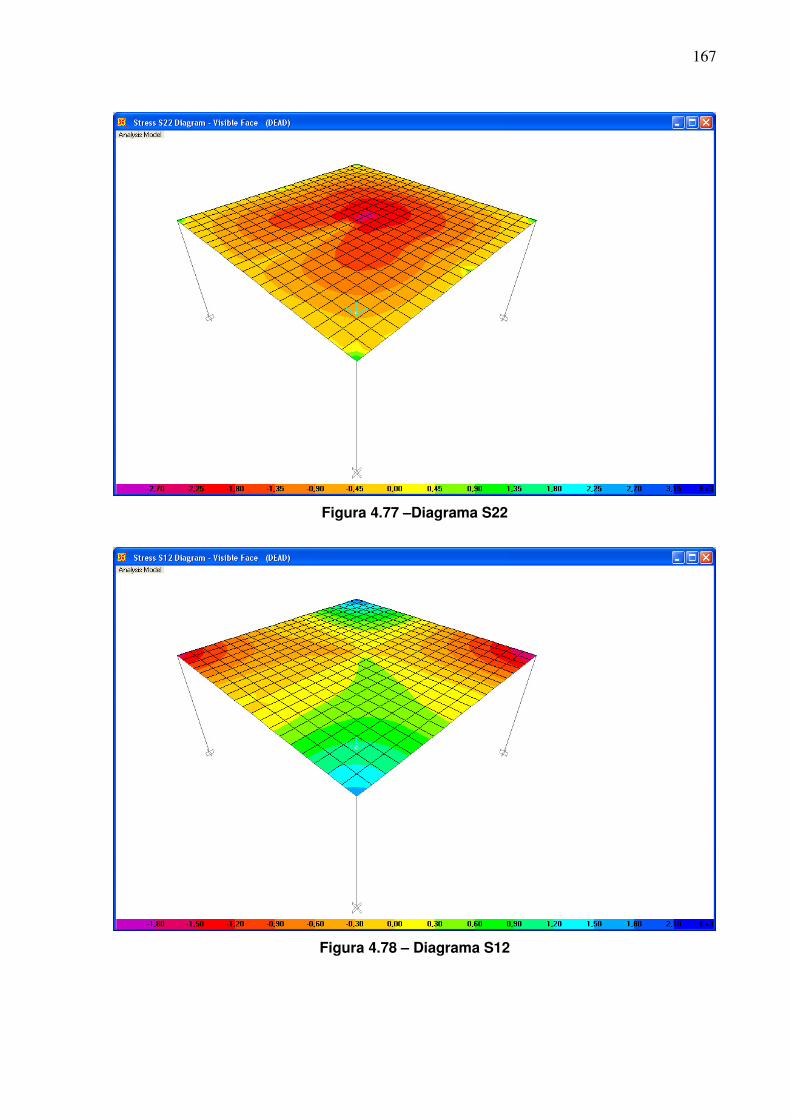
167
Figura 4.77 –Diagrama S22
Figura 4.78 – Diagrama S12
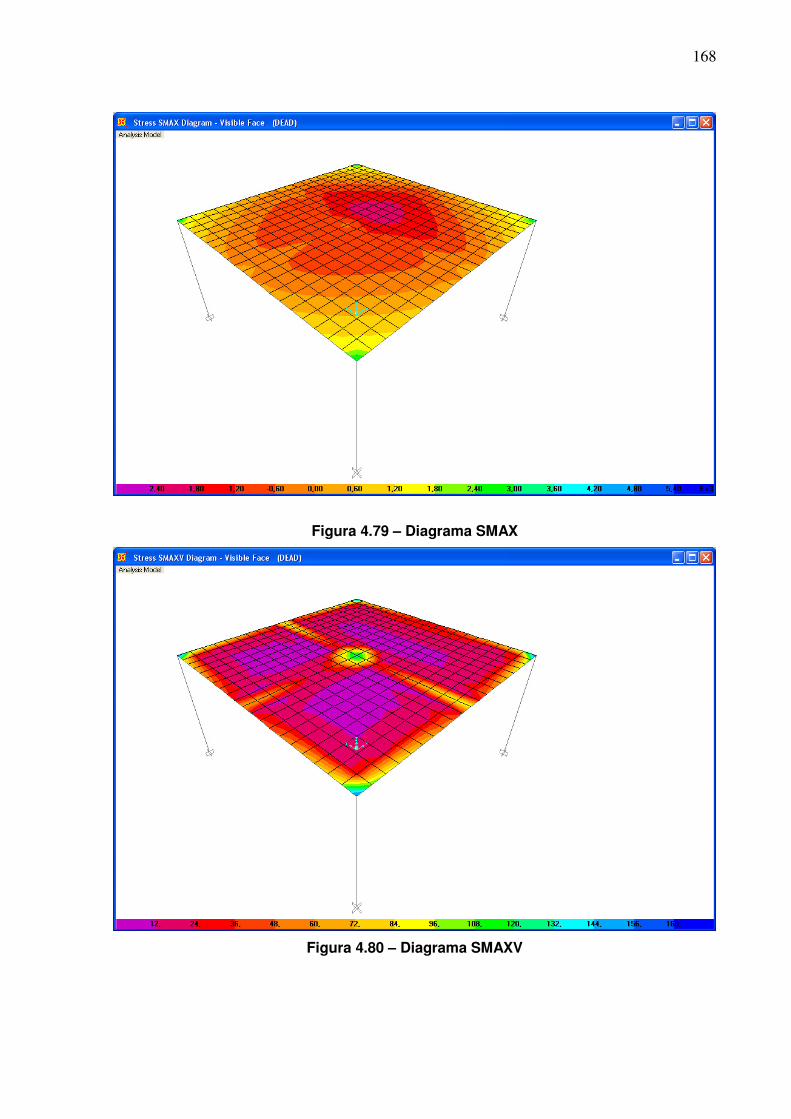
168
Figura 4.79 – Diagrama SMAX
Figura 4.80 – Diagrama SMAXV
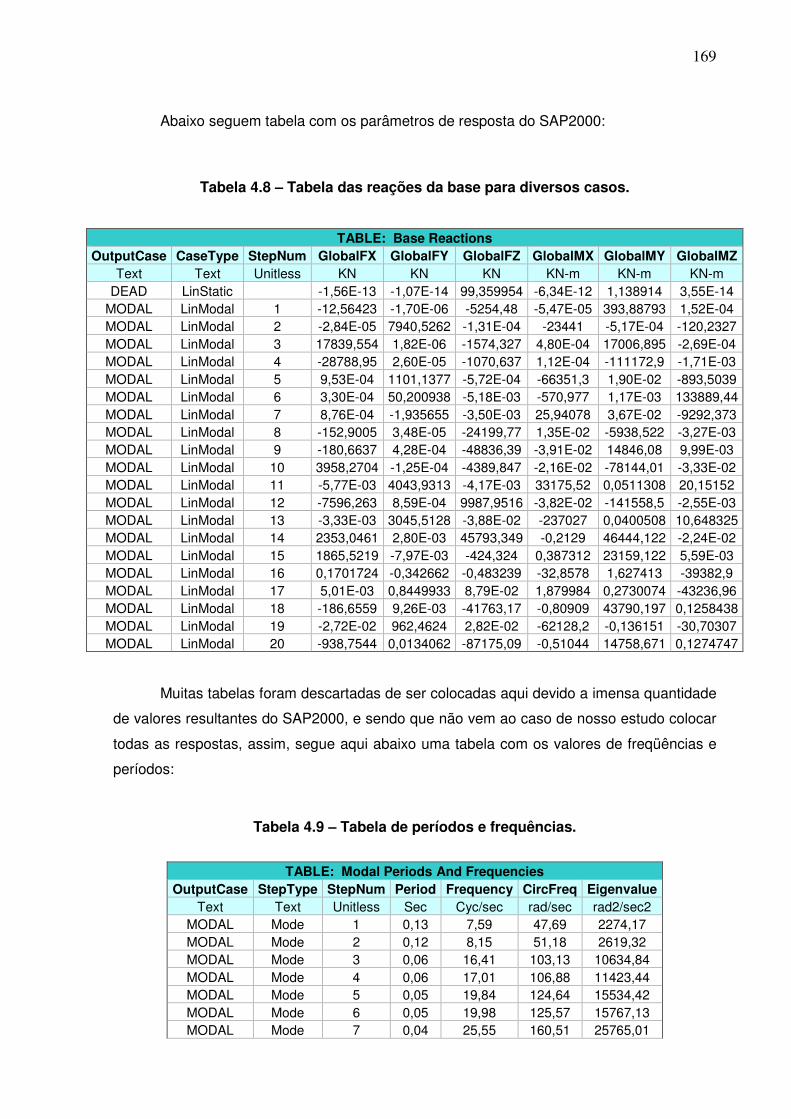
169
Abaixo seguem tabela com os parâmetros de resposta do SAP2000:
Tabela 4.8 – Tabela das reações da base para diversos casos.
TABLE: Base Reactions OutputCase CaseType StepNum GlobalFX GlobalFY GlobalFZ GlobalMX GlobalMY GlobalMZ
Text Text Unitless KN KN KN KN-m KN-m KN-m DEAD LinStatic -1,56E-13 -1,07E-14 99,359954 -6,34E-12 1,138914 3,55E-14
MODAL LinModal 1 -12,56423 -1,70E-06 -5254,48 -5,47E-05 393,88793 1,52E-04 MODAL LinModal 2 -2,84E-05 7940,5262 -1,31E-04 -23441 -5,17E-04 -120,2327 MODAL LinModal 3 17839,554 1,82E-06 -1574,327 4,80E-04 17006,895 -2,69E-04 MODAL LinModal 4 -28788,95 2,60E-05 -1070,637 1,12E-04 -111172,9 -1,71E-03 MODAL LinModal 5 9,53E-04 1101,1377 -5,72E-04 -66351,3 1,90E-02 -893,5039 MODAL LinModal 6 3,30E-04 50,200938 -5,18E-03 -570,977 1,17E-03 133889,44 MODAL LinModal 7 8,76E-04 -1,935655 -3,50E-03 25,94078 3,67E-02 -9292,373 MODAL LinModal 8 -152,9005 3,48E-05 -24199,77 1,35E-02 -5938,522 -3,27E-03 MODAL LinModal 9 -180,6637 4,28E-04 -48836,39 -3,91E-02 14846,08 9,99E-03 MODAL LinModal 10 3958,2704 -1,25E-04 -4389,847 -2,16E-02 -78144,01 -3,33E-02 MODAL LinModal 11 -5,77E-03 4043,9313 -4,17E-03 33175,52 0,0511308 20,15152 MODAL LinModal 12 -7596,263 8,59E-04 9987,9516 -3,82E-02 -141558,5 -2,55E-03 MODAL LinModal 13 -3,33E-03 3045,5128 -3,88E-02 -237027 0,0400508 10,648325 MODAL LinModal 14 2353,0461 2,80E-03 45793,349 -0,2129 46444,122 -2,24E-02 MODAL LinModal 15 1865,5219 -7,97E-03 -424,324 0,387312 23159,122 5,59E-03 MODAL LinModal 16 0,1701724 -0,342662 -0,483239 -32,8578 1,627413 -39382,9 MODAL LinModal 17 5,01E-03 0,8449933 8,79E-02 1,879984 0,2730074 -43236,96 MODAL LinModal 18 -186,6559 9,26E-03 -41763,17 -0,80909 43790,197 0,1258438 MODAL LinModal 19 -2,72E-02 962,4624 2,82E-02 -62128,2 -0,136151 -30,70307 MODAL LinModal 20 -938,7544 0,0134062 -87175,09 -0,51044 14758,671 0,1274747
Muitas tabelas foram descartadas de ser colocadas aqui devido a imensa quantidade
de valores resultantes do SAP2000, e sendo que não vem ao caso de nosso estudo colocar
todas as respostas, assim, segue aqui abaixo uma tabela com os valores de freqüências e
períodos:
Tabela 4.9 – Tabela de períodos e frequências.
TABLE: Modal Periods And Frequencies
OutputCase StepType StepNum Period Frequency CircFreq Eigenvalue Text Text Unitless Sec Cyc/sec rad/sec rad2/sec2
MODAL Mode 1 0,13 7,59 47,69 2274,17 MODAL Mode 2 0,12 8,15 51,18 2619,32 MODAL Mode 3 0,06 16,41 103,13 10634,84 MODAL Mode 4 0,06 17,01 106,88 11423,44 MODAL Mode 5 0,05 19,84 124,64 15534,42 MODAL Mode 6 0,05 19,98 125,57 15767,13 MODAL Mode 7 0,04 25,55 160,51 25765,01
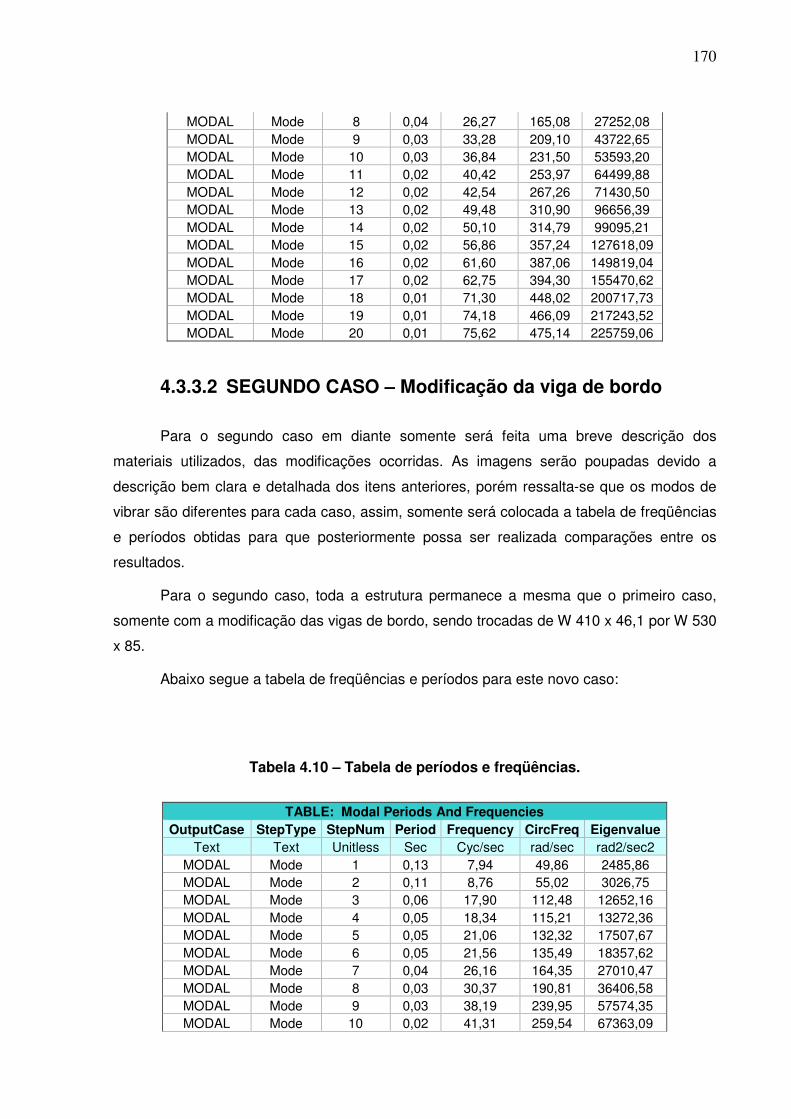
170
MODAL Mode 8 0,04 26,27 165,08 27252,08 MODAL Mode 9 0,03 33,28 209,10 43722,65 MODAL Mode 10 0,03 36,84 231,50 53593,20 MODAL Mode 11 0,02 40,42 253,97 64499,88 MODAL Mode 12 0,02 42,54 267,26 71430,50 MODAL Mode 13 0,02 49,48 310,90 96656,39 MODAL Mode 14 0,02 50,10 314,79 99095,21 MODAL Mode 15 0,02 56,86 357,24 127618,09 MODAL Mode 16 0,02 61,60 387,06 149819,04 MODAL Mode 17 0,02 62,75 394,30 155470,62 MODAL Mode 18 0,01 71,30 448,02 200717,73 MODAL Mode 19 0,01 74,18 466,09 217243,52 MODAL Mode 20 0,01 75,62 475,14 225759,06
4.3.3.2 SEGUNDO CASO – Modificação da viga de bordo
Para o segundo caso em diante somente será feita uma breve descrição dos
materiais utilizados, das modificações ocorridas. As imagens serão poupadas devido a
descrição bem clara e detalhada dos itens anteriores, porém ressalta-se que os modos de
vibrar são diferentes para cada caso, assim, somente será colocada a tabela de freqüências
e períodos obtidas para que posteriormente possa ser realizada comparações entre os
resultados.
Para o segundo caso, toda a estrutura permanece a mesma que o primeiro caso,
somente com a modificação das vigas de bordo, sendo trocadas de W 410 x 46,1 por W 530
x 85.
Abaixo segue a tabela de freqüências e períodos para este novo caso:
Tabela 4.10 – Tabela de períodos e freqüências.
TABLE: Modal Periods And Frequencies
OutputCase StepType StepNum Period Frequency CircFreq Eigenvalue Text Text Unitless Sec Cyc/sec rad/sec rad2/sec2
MODAL Mode 1 0,13 7,94 49,86 2485,86 MODAL Mode 2 0,11 8,76 55,02 3026,75 MODAL Mode 3 0,06 17,90 112,48 12652,16 MODAL Mode 4 0,05 18,34 115,21 13272,36 MODAL Mode 5 0,05 21,06 132,32 17507,67 MODAL Mode 6 0,05 21,56 135,49 18357,62 MODAL Mode 7 0,04 26,16 164,35 27010,47 MODAL Mode 8 0,03 30,37 190,81 36406,58 MODAL Mode 9 0,03 38,19 239,95 57574,35 MODAL Mode 10 0,02 41,31 259,54 67363,09
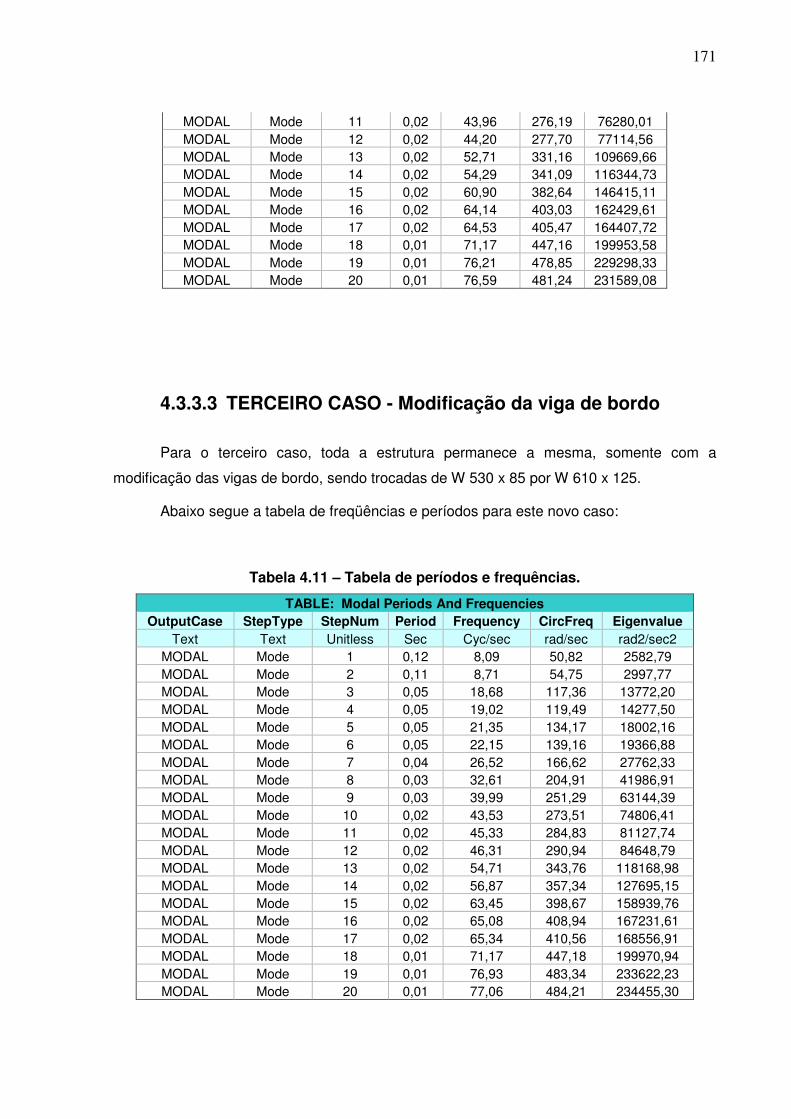
171
MODAL Mode 11 0,02 43,96 276,19 76280,01 MODAL Mode 12 0,02 44,20 277,70 77114,56 MODAL Mode 13 0,02 52,71 331,16 109669,66 MODAL Mode 14 0,02 54,29 341,09 116344,73 MODAL Mode 15 0,02 60,90 382,64 146415,11 MODAL Mode 16 0,02 64,14 403,03 162429,61 MODAL Mode 17 0,02 64,53 405,47 164407,72 MODAL Mode 18 0,01 71,17 447,16 199953,58 MODAL Mode 19 0,01 76,21 478,85 229298,33 MODAL Mode 20 0,01 76,59 481,24 231589,08
4.3.3.3 TERCEIRO CASO - Modificação da viga de bordo
Para o terceiro caso, toda a estrutura permanece a mesma, somente com a
modificação das vigas de bordo, sendo trocadas de W 530 x 85 por W 610 x 125.
Abaixo segue a tabela de freqüências e períodos para este novo caso:
Tabela 4.11 – Tabela de períodos e frequências.
TABLE: Modal Periods And Frequencies OutputCase StepType StepNum Period Frequency CircFreq Eigenvalue
Text Text Unitless Sec Cyc/sec rad/sec rad2/sec2 MODAL Mode 1 0,12 8,09 50,82 2582,79 MODAL Mode 2 0,11 8,71 54,75 2997,77 MODAL Mode 3 0,05 18,68 117,36 13772,20 MODAL Mode 4 0,05 19,02 119,49 14277,50 MODAL Mode 5 0,05 21,35 134,17 18002,16 MODAL Mode 6 0,05 22,15 139,16 19366,88 MODAL Mode 7 0,04 26,52 166,62 27762,33 MODAL Mode 8 0,03 32,61 204,91 41986,91 MODAL Mode 9 0,03 39,99 251,29 63144,39 MODAL Mode 10 0,02 43,53 273,51 74806,41 MODAL Mode 11 0,02 45,33 284,83 81127,74 MODAL Mode 12 0,02 46,31 290,94 84648,79 MODAL Mode 13 0,02 54,71 343,76 118168,98 MODAL Mode 14 0,02 56,87 357,34 127695,15 MODAL Mode 15 0,02 63,45 398,67 158939,76 MODAL Mode 16 0,02 65,08 408,94 167231,61 MODAL Mode 17 0,02 65,34 410,56 168556,91 MODAL Mode 18 0,01 71,17 447,18 199970,94 MODAL Mode 19 0,01 76,93 483,34 233622,23 MODAL Mode 20 0,01 77,06 484,21 234455,30
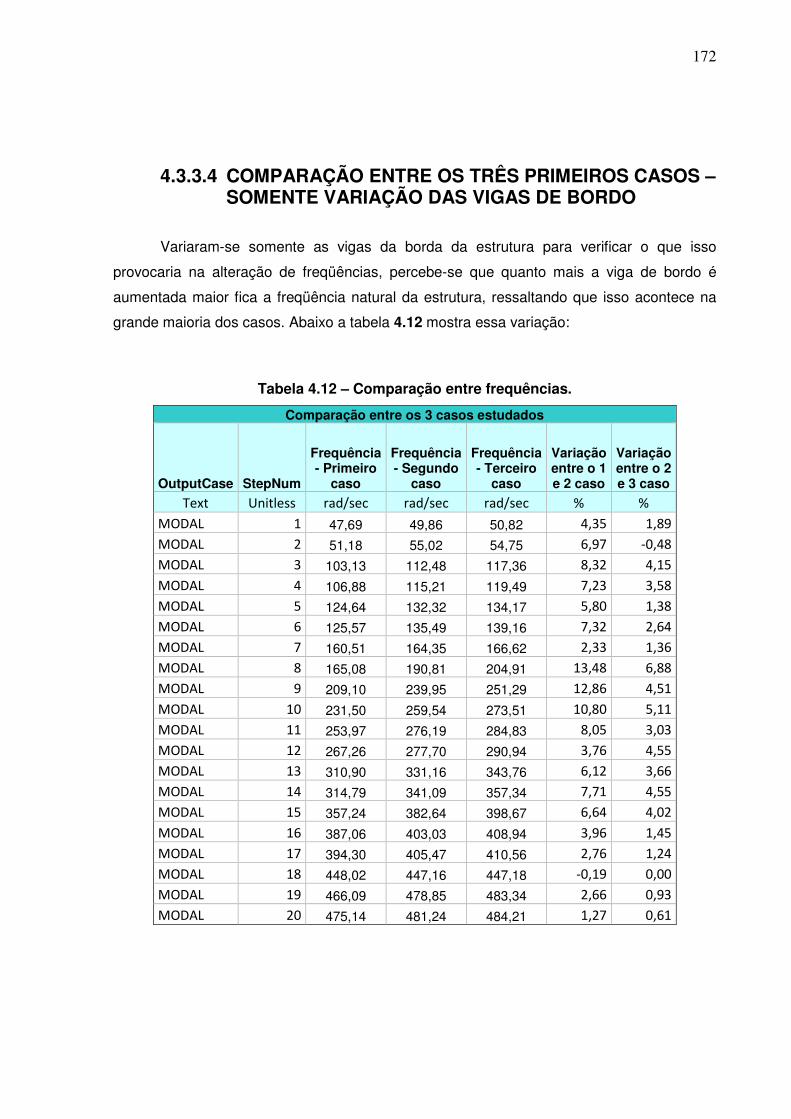
172
4.3.3.4 COMPARAÇÃO ENTRE OS TRÊS PRIMEIROS CASOS – SOMENTE VARIAÇÃO DAS VIGAS DE BORDO
Variaram-se somente as vigas da borda da estrutura para verificar o que isso
provocaria na alteração de freqüências, percebe-se que quanto mais a viga de bordo é
aumentada maior fica a freqüência natural da estrutura, ressaltando que isso acontece na
grande maioria dos casos. Abaixo a tabela 4.12 mostra essa variação:
Tabela 4.12 – Comparação entre frequências.
Comparação entre os 3 casos estudados
OutputCase StepNum
Frequência - Primeiro
caso
Frequência - Segundo
caso
Frequência - Terceiro
caso
Variação entre o 1 e 2 caso
Variação entre o 2 e 3 caso
Text Unitless rad/sec rad/sec rad/sec % %
MODAL 1 47,69 49,86 50,82 4,35 1,89
MODAL 2 51,18 55,02 54,75 6,97 -0,48
MODAL 3 103,13 112,48 117,36 8,32 4,15
MODAL 4 106,88 115,21 119,49 7,23 3,58
MODAL 5 124,64 132,32 134,17 5,80 1,38
MODAL 6 125,57 135,49 139,16 7,32 2,64
MODAL 7 160,51 164,35 166,62 2,33 1,36
MODAL 8 165,08 190,81 204,91 13,48 6,88
MODAL 9 209,10 239,95 251,29 12,86 4,51
MODAL 10 231,50 259,54 273,51 10,80 5,11
MODAL 11 253,97 276,19 284,83 8,05 3,03
MODAL 12 267,26 277,70 290,94 3,76 4,55
MODAL 13 310,90 331,16 343,76 6,12 3,66
MODAL 14 314,79 341,09 357,34 7,71 4,55
MODAL 15 357,24 382,64 398,67 6,64 4,02
MODAL 16 387,06 403,03 408,94 3,96 1,45
MODAL 17 394,30 405,47 410,56 2,76 1,24
MODAL 18 448,02 447,16 447,18 -0,19 0,00
MODAL 19 466,09 478,85 483,34 2,66 0,93
MODAL 20 475,14 481,24 484,21 1,27 0,61
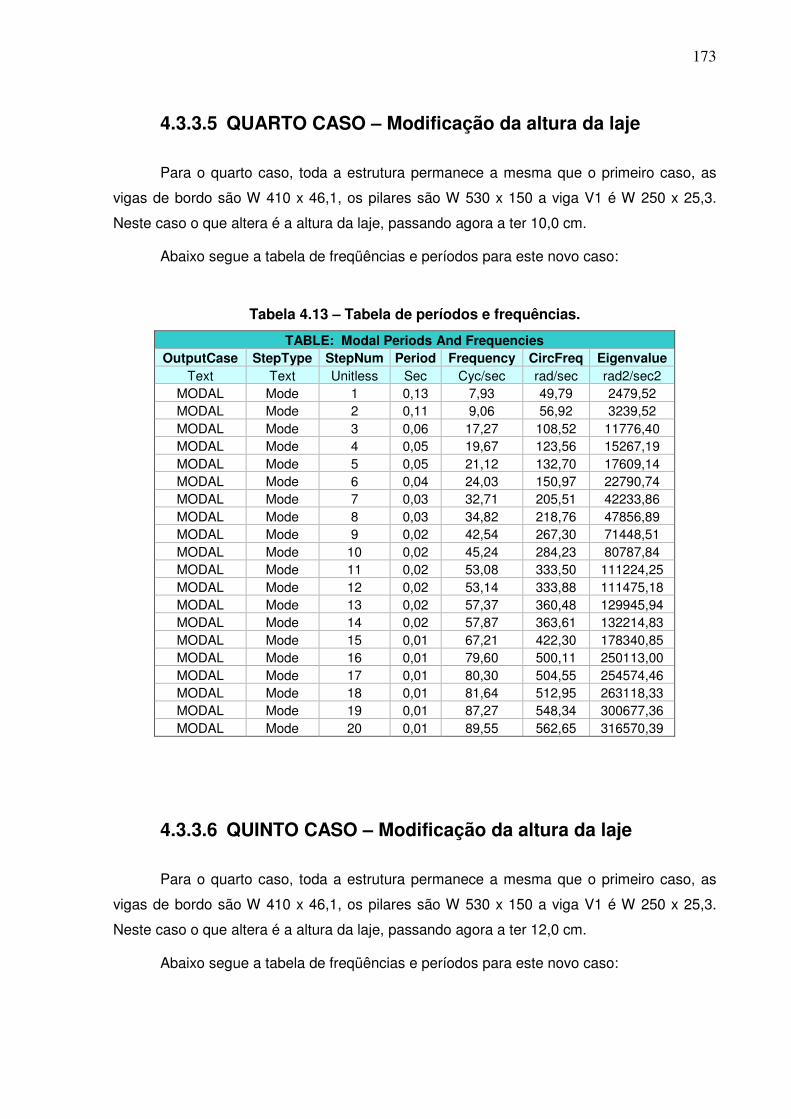
173
4.3.3.5 QUARTO CASO – Modificação da altura da laje
Para o quarto caso, toda a estrutura permanece a mesma que o primeiro caso, as
vigas de bordo são W 410 x 46,1, os pilares são W 530 x 150 a viga V1 é W 250 x 25,3.
Neste caso o que altera é a altura da laje, passando agora a ter 10,0 cm.
Abaixo segue a tabela de freqüências e períodos para este novo caso:
Tabela 4.13 – Tabela de períodos e frequências.
TABLE: Modal Periods And Frequencies OutputCase StepType StepNum Period Frequency CircFreq Eigenvalue
Text Text Unitless Sec Cyc/sec rad/sec rad2/sec2 MODAL Mode 1 0,13 7,93 49,79 2479,52 MODAL Mode 2 0,11 9,06 56,92 3239,52 MODAL Mode 3 0,06 17,27 108,52 11776,40 MODAL Mode 4 0,05 19,67 123,56 15267,19 MODAL Mode 5 0,05 21,12 132,70 17609,14 MODAL Mode 6 0,04 24,03 150,97 22790,74 MODAL Mode 7 0,03 32,71 205,51 42233,86 MODAL Mode 8 0,03 34,82 218,76 47856,89 MODAL Mode 9 0,02 42,54 267,30 71448,51 MODAL Mode 10 0,02 45,24 284,23 80787,84 MODAL Mode 11 0,02 53,08 333,50 111224,25 MODAL Mode 12 0,02 53,14 333,88 111475,18 MODAL Mode 13 0,02 57,37 360,48 129945,94 MODAL Mode 14 0,02 57,87 363,61 132214,83 MODAL Mode 15 0,01 67,21 422,30 178340,85 MODAL Mode 16 0,01 79,60 500,11 250113,00 MODAL Mode 17 0,01 80,30 504,55 254574,46 MODAL Mode 18 0,01 81,64 512,95 263118,33 MODAL Mode 19 0,01 87,27 548,34 300677,36 MODAL Mode 20 0,01 89,55 562,65 316570,39
4.3.3.6 QUINTO CASO – Modificação da altura da laje
Para o quarto caso, toda a estrutura permanece a mesma que o primeiro caso, as
vigas de bordo são W 410 x 46,1, os pilares são W 530 x 150 a viga V1 é W 250 x 25,3.
Neste caso o que altera é a altura da laje, passando agora a ter 12,0 cm.
Abaixo segue a tabela de freqüências e períodos para este novo caso:
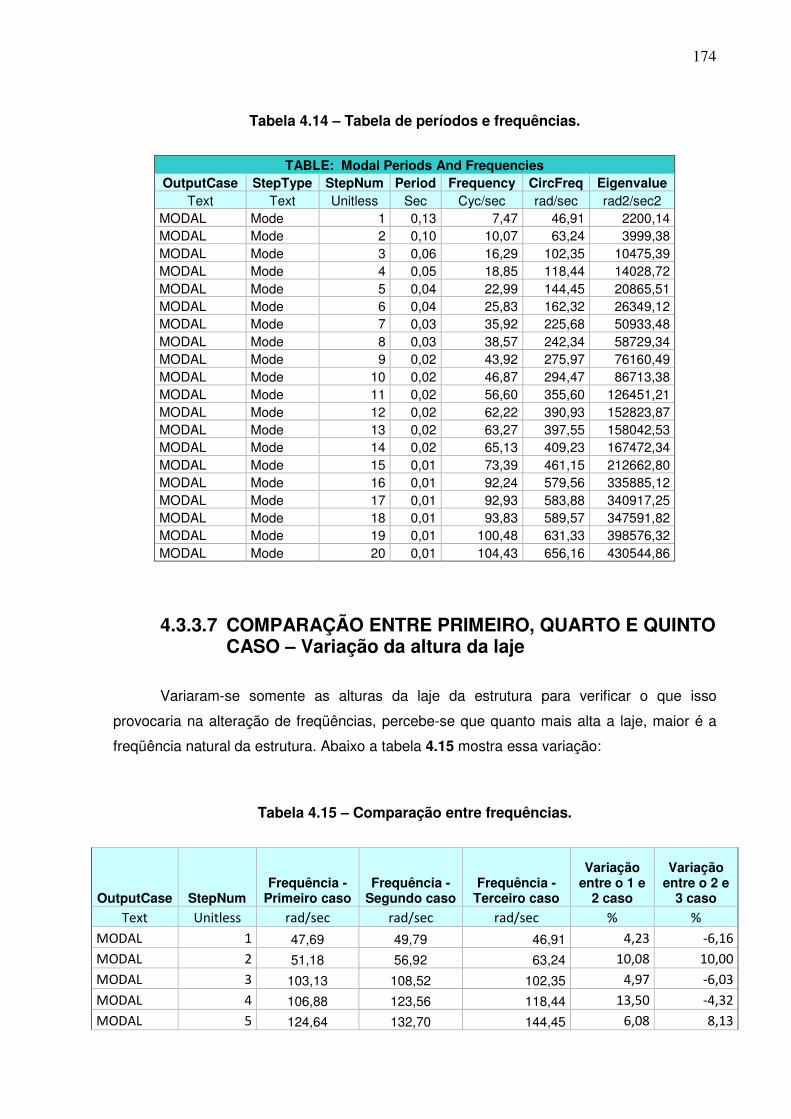
174
Tabela 4.14 – Tabela de períodos e frequências.
TABLE: Modal Periods And Frequencies
OutputCase StepType StepNum Period Frequency CircFreq Eigenvalue Text Text Unitless Sec Cyc/sec rad/sec rad2/sec2
MODAL Mode 1 0,13 7,47 46,91 2200,14 MODAL Mode 2 0,10 10,07 63,24 3999,38 MODAL Mode 3 0,06 16,29 102,35 10475,39 MODAL Mode 4 0,05 18,85 118,44 14028,72 MODAL Mode 5 0,04 22,99 144,45 20865,51 MODAL Mode 6 0,04 25,83 162,32 26349,12 MODAL Mode 7 0,03 35,92 225,68 50933,48 MODAL Mode 8 0,03 38,57 242,34 58729,34 MODAL Mode 9 0,02 43,92 275,97 76160,49 MODAL Mode 10 0,02 46,87 294,47 86713,38 MODAL Mode 11 0,02 56,60 355,60 126451,21 MODAL Mode 12 0,02 62,22 390,93 152823,87 MODAL Mode 13 0,02 63,27 397,55 158042,53 MODAL Mode 14 0,02 65,13 409,23 167472,34 MODAL Mode 15 0,01 73,39 461,15 212662,80 MODAL Mode 16 0,01 92,24 579,56 335885,12 MODAL Mode 17 0,01 92,93 583,88 340917,25 MODAL Mode 18 0,01 93,83 589,57 347591,82 MODAL Mode 19 0,01 100,48 631,33 398576,32 MODAL Mode 20 0,01 104,43 656,16 430544,86
4.3.3.7 COMPARAÇÃO ENTRE PRIMEIRO, QUARTO E QUINTO CASO – Variação da altura da laje
Variaram-se somente as alturas da laje da estrutura para verificar o que isso
provocaria na alteração de freqüências, percebe-se que quanto mais alta a laje, maior é a
freqüência natural da estrutura. Abaixo a tabela 4.15 mostra essa variação:
Tabela 4.15 – Comparação entre frequências.
OutputCase StepNum Frequência -
Primeiro caso Frequência -
Segundo caso Frequência -
Terceiro caso
Variação entre o 1 e
2 caso
Variação entre o 2 e
3 caso
Text Unitless rad/sec rad/sec rad/sec % %
MODAL 1 47,69 49,79 46,91 4,23 -6,16
MODAL 2 51,18 56,92 63,24 10,08 10,00
MODAL 3 103,13 108,52 102,35 4,97 -6,03
MODAL 4 106,88 123,56 118,44 13,50 -4,32
MODAL 5 124,64 132,70 144,45 6,08 8,13
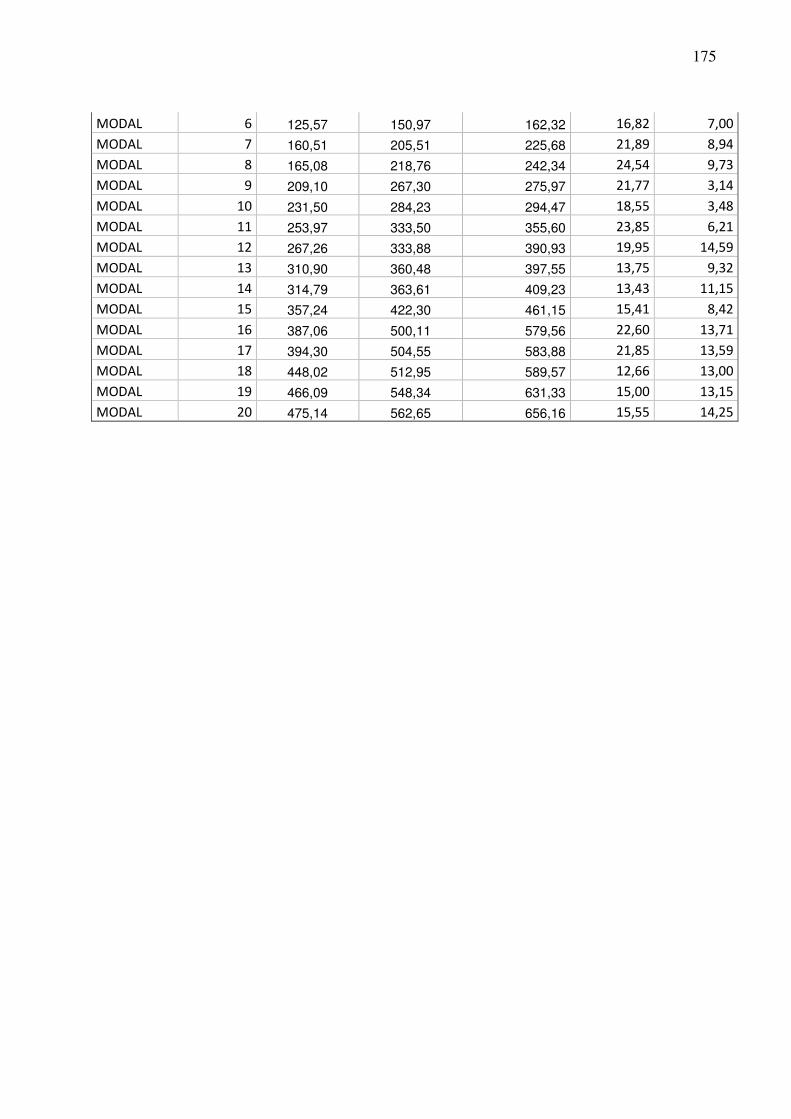
175
MODAL 6 125,57 150,97 162,32 16,82 7,00
MODAL 7 160,51 205,51 225,68 21,89 8,94
MODAL 8 165,08 218,76 242,34 24,54 9,73
MODAL 9 209,10 267,30 275,97 21,77 3,14
MODAL 10 231,50 284,23 294,47 18,55 3,48
MODAL 11 253,97 333,50 355,60 23,85 6,21
MODAL 12 267,26 333,88 390,93 19,95 14,59
MODAL 13 310,90 360,48 397,55 13,75 9,32
MODAL 14 314,79 363,61 409,23 13,43 11,15
MODAL 15 357,24 422,30 461,15 15,41 8,42
MODAL 16 387,06 500,11 579,56 22,60 13,71
MODAL 17 394,30 504,55 583,88 21,85 13,59
MODAL 18 448,02 512,95 589,57 12,66 13,00
MODAL 19 466,09 548,34 631,33 15,00 13,15
MODAL 20 475,14 562,65 656,16 15,55 14,25
176
5. CONCLUSÕES
Primeiramente foi abordado no trabalho toda uma parte de conceituação de
vibrações, tipos de vibrações e critérios de aceitação existentes pelas Normas e por autores
renomados. Chegou-se a conclusão que o tema já possui uma quantidade significativa de
estudos, porém nenhuma tese ou Norma tem uma solução definitiva e padronizada. A
questão dos critérios de aceitação das vibrações tem um contexto muito subjetivo, o que
torna a análise muito mais complexa, alguns critérios utilizados atualmente têm
embasamento empírico. Ressalta-se também que algumas Normas ainda deixam a desejar
no conteúdo de análise dinâmica, como é o caso da Norma brasileira.
Esse trabalho realizou diversos exemplos analíticos de estruturas além de efetuar as
análises dinâmicas no software SAP 2000. Os exemplos numéricos foram realizados em
diversas vigas (engastadas, apoiadas, etc.), uma caixa d’água, um pavimento e outras
estruturas. Com o auxílio do software, foi possível calcular vários dados da estrutura como:
seus modos de vibração, freqüências naturais, reações e esforços. Também foram feitos
diversos exemplos de vigas com variações dimensionais (modulo de elasticidade, largura,
altura, vão, rigidez específica).
Na comparação entre os resultados verificou-se que realmente a frequência natural
da estrutura está diretamente ligada: às propriedades do material que a constitui, as
condições de apoio, ao tipo de seção. No exemplo em que houve a variação das seções da
viga de concreto, as freqüências naturais sempre aumentavam no caso em que base era
mantida constante e havia o aumento da altura, e para o caso da altura constante e variação
da base acontecia a mesma coisa. No caso em que a seção era mantida constante e só
ocorria a mudança do material de concreto para aço, as frequências também aumentavam
significativamente, se a comparação fosse feita pela inércia da seção.
Houve uma comparação entre os resultados obtidos calculando a estrutura por meio
de expressões analíticas e com o uso do software. O objetivo disto estava em observar uma
grandeza de comparação entre os erros que se obtém no uso do software e do cálculo
analítico. Neste caso, os erros não foram muito grandes, mostrando a credibilidade das
expressões analíticas.
177
No exemplo final, fez-se a resolução de um pavimento, onde havia variação das
vigas de bordo e das alturas das lajes. Em ambas variações, quanto mais rígida a estrutura
ficava, maior era sua frequência, ou seja, com o aumento da altura da laje a frequência
aumentava, e com o aumento da seção da viga de bordo a mesma coisa ocorria.
Chega-se a conclusão que este assunto de análise dinâmica de estruturas é de
extrema importância para o cálculo e dimensionamento de estruturas, devendo sim ser
aplicado em projetos, visando a qualidade de conforto e segurança. Outro aspecto é a
necessidade de aprofundamento e a elaboração de mais estudos sobre o tema, pois como
foi abordado, ele ainda tem algumas discrepâncias entre autores e Normas.
178
6. REFERÊNCIAS
ALLEN, D.E.; MURRAY, T.M. Design Criterion for Vibrations Due to Walking –
Engineering Journal, American Institute of Steel Construction, FOURTH
QUARTER/1993, p.117-129. 1993.
ALCANTARA, P. G. Analise teórico - experimental de um tabuleiro misto madeira -
concreto composto por vigas circulares, 2005. 127 p. Dissertação (Mestrado em Engenharia
Civil). Departamento de Engenharia Civil, Unesp – Universidade Estadual Paulista, Ilha
Solteira, 2005.
BAPTISTA, M.A. Análise experimental para obtenção das características dinâmicas do
edifício da Portugal TELECOM no parque das Nações. In: SÍSMICA - CONGRESSO
NACIONAL DE SISMOLOGIA E ENGENHARIA SÍSMICA. 6. Portugal. Anais... Lisboa.
p. 566 – 574. 2004.
CRAIG, M.F. Evaluation of a floating aerobics floor. Master Tesis. Virginia Polytechnic
Institute.1997.
FILHO, A.A. Elementos Finitos – A Base da Tecnologia CAE. 1. ed. São Paulo: Editora
Érica, 2005. 301 p.
FILHO, L.A.C. Curso de dinâmica das estruturas. Rio de Janeiro, Rio de Janeiro: Instituto
Militar de Engenharia – Departamento de Engenharia Civil, 2004. 30 p. Notas de aula.
179
INCH, Z. et al. Elementos Finitos com Funções “Spline” para Instabilidade e Dinâmica
de Estruturas, 2008. 94 p. Dissertação (Mestrado em Engenharia Civil). Departamento de
Engenharia Civil, Pontifícia Universidade Católica do Rio de Janeiro, Rio de Janeiro, 2008.
MOREIRA, B.C., et al. Avaliação das vibrações em pisos segundo a variação da taxa de
amortecimento. In. JORNADAS SULAMERICANAS DE ENGENHARIA ESTRUTURAL.
32. 2006. Brasil. Anais... Campinas. p. 841 – 856.
MURRAY, T. M.; ALLEN, D. E.; UNGAR, E. E. Floor vibration due to Human Activities
AISC Steel Design Guide Series, vol 11, 1997.
NBR 6118. Projeto e execução de obras de concreto armado, ABNT, 2003.
NBR 8800. Projeto e execução de estruturas de aço de edifícios, ABNT, 1998.
Ng. A.; Yum Gary. Floor vibrations in composite steel office buildings, March, 2005.
NÓBREGA, P.G.B., Análise dinâmica de estruturas de concreto: estudo experimental e
numérico das condições de contorno de estruturas pré - moldadas, 2004. 239 p.
Dissertação (Doutorado em Engenharia Civil). Departamento de Engenharia Civil,
Universidade de São Paulo, São Carlos, 2004.
RAKESH, K.G. Tutorial do SAP 2000 Educational. San Luis Obispo, California: California
Polytechnic State University - Department of Civil and Environmental Engineering, 2001. 22
p. Apostila.
RIBEIRO, E. de C. Análise de torres metálicas estaiadas submetidas à ação do vento,
2007. 177 p. Dissertação (Mestrado em Engenharia Civil). Departamento de Engenharia Civil
e Ambiental, Universidade de Brasília, Brasília, 2007.
SOMMER, R.M.R. Análise de vibrações em pisos mistos de aço/concreto, 2002. 138 p.
Dissertação (Mestrado em Engenharia Civil).Departamento de Engenharia Civil,
Universidade Federal de Minas Gerais, Belo Horizonte, 2002.
YANG, T. Behavior of plastic design of steel structures. Berkeley, California: University of
California - Department of Civil Engineering, 2005. 30 p. Notas de aula.


















