UNIVERSIDADE ESTADUAL DE SANTA CATARINA - UDESC …miltonborba.org/ALG1/apostila_I_06.pdf · origem...
72
UNIVERSIDADE ESTADUAL DE SANTA CATARINA - UDESC CENTRO DE CIÊCIAS TECNOLÓGICAS - CCT ÁGEBRA I Professores: Angela T. Z. Dalpiva - Enori Carelli - Carla R. K. Ferreira - Péricles B. Moraes - Renata C. Fusverk - Werner Kols Joinville, 2006
Transcript of UNIVERSIDADE ESTADUAL DE SANTA CATARINA - UDESC …miltonborba.org/ALG1/apostila_I_06.pdf · origem...

UNIVERSIDADE ESTADUAL DE SANTA CATARINA - UDESC
CENTRO DE CIÊCIAS TECNOLÓGICAS - CCT
ÁGEBRA I
Professores: Angela T. Z. Dalpiva - Enori Carelli - Carla R. K. Ferreira -
Péricles B. Moraes - Renata C. Fusverk - Werner Kols
Joinville, 2006

Sumário
1 SISTEMAS DE COORDENADAS 4
1.1 Objetivos do capítulo . . . . . . . . . . . . . . . . . . . . . 4
1.2 Coordenadas polares no R2 . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Relação entre o Sistema de Coordenadas Cartesianas Retangulares e o
Sistema de Coordenadas Polares. . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Gráfico em coordenadas polares . . . . . . . . . . . . . . . . . . . . . . . 10
1.5 Técnicas que facilitam o traçado do gráfico de uma curva em coordenadas
polares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.5.1 Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.5.2 Algumas Equações em Coordenadas Polares e seus respectivos
Gráficos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5.3 Equações de retas. . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5.4 Circunferências. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5.5 Limaçons. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.5.6 Lemniscatas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5.7 Espirais. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.6 EXERCÍCIOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.7 Sistemas de coordenadas no R3 . . . . . . . . . . . . . . . . . . . . . . . 23
1.7.1 Coordenadas polares no espaço tridimensional . . . . . . . . . . . 23
1.8 Coordenadas Cilíndricas . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.9 Coordenadas esféricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.9.1 Relações entre as coordenadas retangulares e esféricas . . . . . . . 27
1.9.2 Outros exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.10 EXERCÍCIOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2 Sistemas de coordenadas auxiliares 38
2.1 Transformação de Coordenadas . . . . . . . . . . . . . . . . . . . . . . . 38
2.2 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.2.1 Respostas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2

3 Rotação dos eixos coordenados 46
3.0.2 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.0.3 Respostas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.1 Simplificação de equações por meio de transformação de coordenadas. . . 53
3.1.1 Respostas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4 Cônicas 59
4.1 OBJETIVOS DO CAPÍTULO . . . . . . . . . . . . . . . . . . . . . . . . 59
5 Vetores 62
5.1 OBJETIVOS DO CAPÍTULO . . . . . . . . . . . . . . . . . . . . . 62
6 Retas 66
6.1 OBJETIVOS DO CAPÍTULO . . . . . . . . . . . . . . . . . . . . . 66
7 Planos e distâncias 70
7.1 OBJETIVOS DO CAPÍTULO . . . . . . . . . . . . . . . . . . . . . 70
7.2 Bibliografia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3

1 SISTEMAS DE COORDENADAS
1.1 Objetivos do capítuloAo final deste capítulo o aluno deverá:
• Representar pontos em coordenadas polares, cilíndricas e esféricas;
• Representar graficamente curvas escritas em coordenadas polares;
• Transformar equações de um sistema de coordenadas para outro;
• Efetuar translação de eixos coordenados;
• Rotacionar eixos coordenados;
• Simplificar equações por meio de transformação de coordenadas.
1.2 Coordenadas polares no R2
Até o presente momento, localizamos um ponto no plano por meio de suas coordenadas
cartesianas retangulares. Existem outros sistemas de coordenadas. Um sistema
bastante utilizado é o sistema de coordenadas polares. Nesse sistema, as coordenadas
de um ponto são dadas pelo raio de uma circunferência e um determinado ângulo. Por
exemplo, P(2,π4) significa que o ponto será marcado sobre uma circunferência de raio
r=2 a π4graus do eixo dos x no sentido anti-horário. Veja na figura 1.
θ=−−−−π
4
Figura 1: Ponto P¡r = 2, θ = π
4
¢em coordenadas polares
4

A Figura 2 ilustra um ponto P genérico num sistema de coordenadas polares.
O ponto fixo, denotado por O, é chamado pólo ou origem.
Convenções normalmente usadas:
(i) Se o ângulo [AOP for descrito no sentido anti-horário, então θ > 0. Caso contrário,
usa-se θ < 0.
(ii) Se r < 0, o ponto P estará localizado a180 graus do ângulo [AOP . Veja na figura
2 a representação do ponto P (−2, 45o)
(iii) O par ordenado (0, θ), sendo θ qualquer, representará uma circunferência de raio
r = 0 que é denominada pólo.
P(-2,45)
O
2
Figura 2:
Geralmente, o sistema de coordenadas polares é descrito como segue:
Um ponto fixo, denotado por O, é chamado pólo ou origem, o semi-eixo coincidindo
com o semi-eixo das abscissas é denominado eixo polar, r é o raio da circunferência e o
ângulo, dado em pi radianos, é denomiado argumento. Veja na figura 2a, a
representação geométrica.
Na fiura 2a, o ponto O é denominado pólo ou origem. A semi-reta fixa−→OA é chamada
eixo polar. O ponto P fica bem determinado através do par (r, θ) em que |r|representa a distância entre a origem O e o ponto P , θ representa a medida do ângulo
orientado [OAP.
5

-©©©©
©©©©
O eixo polar A
P (r, θ)r¥¦θrPólo
ouorigem
r
Figura 2aA Representação num sistema de coordenadas polares dos seguintes pontos P
¡2, π
4
¢,
P¡−2, π
4
¢, é mostrado na Figura 3.
ρ = 2
Π
Ειξπ πολαρ
ρ =− 2
Θ
Ειξπ πολαρ
πι/4
πι/4
Figura 3:
A Figura 3a mostra os pontos P
-eixo polar@
@@@@@@@
r@@
@
@
rP
r = −2
¥¦θ = −π4
Figura 3a
6

1.3 Relação entre o Sistema de Coordenadas Cartesianas Re-
tangulares e o Sistema de Coordenadas Polares.
Em várias situações, surge a necessidade de nos referirmos a ambas, coordenadas
cartesianas e coordenadas polares de um ponto P . Para visualizar isto, fazemos a
origem do primeiro sistema coincidir com o pólo do segundo sistema, o eixo polar com
o eixo positivo dos x e o raio para o qual θ = π/2 com o eixo positivo dos y (ver
Figura 3b).
-
X-A
6Y
O
$θ = π2
Figura 3b
Y
Supondo que P seja um ponto com coordenadas cartesianas (x, y) e coordenadas
polares (r, θ), vamos analisar o caso em que o ponto P está no primeiro quadrante.
A Figura 3c ilustra o caso para r > 0.
-
X
6Y
¡¡¡¡¡¡rP
x
y
r©i
(a)
θ
Figura 3c
Podemos observar que:
(i) Para r > 0, temos
7

cos θ = xre sin θ = y
r.
(ii) Para r < 0, temos
cos θ = −x−r e sin θ =
−y−r .
Portanto,
x = r cos θ
y = r sin θ.
(1)
Pode-se verificar a validade das relações encontradas, no caso em que o ponto P se
encontra sobre um dos eixos ou num outro quadrante.
Usando (1), podemos deduzir outra relação muito usada.
Elevando ambos os membros das equações em (1) ao quadrado, podemos escrever x2 = r2 cos2 θ
y2 = r2 sin2 θ.
Adicionando membro a membro, obtemos:
x2 + y2 = r2 cos2 θ + r2 sin2 θ
ou
x2 + y2 = r2.
Portanto,
r = ±px2 + y2.
(2)
Exemplo 1 Encontrar as coordenadas cartesianas do ponto cujas
coordenadas polares são (−4, 7π/6).
8

Solução. A Figura 3d ilustra este ponto.
Temos,
x = r cos θ e y = r sin θ
= −4 cos 7π6
= −4 sin 7π6
= −4³−√32
´= −4 ¡−1
2
¢= 2
√3 = 2.
Portanto, (2√3, 2) são as coordenadas carte-
sianas do ponto dado.
-
X
6Y
¡¡
¡¡
¡¡
x
y r P
®
7π6
Figura 3d
¡
¡
¡
¡
Exemplo 2 Encontrar (r, θ), supondo r < 0 e 0 ≤ θ < 2π para o ponto P , cujas
coordenadas cartesianas são (√3,−1).
Solução. A Figura 3e ilustra o ponto P.
r = −px2 + y2
= −√3 + 1= −2;
cos θ = xr =
√3
−2 = −√32 e
sin θ = yr =
−1−2 =
12 .
Portanto, θ = 5π6 .
9
-
X
6Y
@@
@@
@@
√3
−1 rP
ª5π6
Figura 3e
@
@
@
@
1.4 Gráfico em coordenadas polares
Para traçar o gráfico de uma curva em coordenadas polares ρ = f (θ) procede-se como
segue:
a) Encontra-se os valores de ρ para alguns arcos notáveis;
b) Elabora-se um disco com setores cujos raios são os valores encontrados para ρ;
c) Marcam-se os pontos interseção do setor do disco com o raio ρ associado ao ângulo
correspondente;
d) Unem-se os pontos por meio de uma linha curva contínua.
Exemplo 3 Traçar o gráfico da curva ρ = 4√cos 2θ.
Solução: vamos tomar para 2θ os arcos 0o, 30o, 45o, 60o e 90o e seus correspondentes
nos outros quadrantes. Assim podemos formar a tabela de valores
θ 2θ ρ θ 2θ ρ θ 2θ ρ θ 2θ ρ
0 0 4 135 270 0 195 390 3.4 315 630 2
15 30 3.4 150 300 2 202, 5 415 2.8 330 660 2.8
22, 5 45 2.8 157, 5 315 2.8 210 420 2 345 690 3.4
30 60 2 165 330 3.4 225 450 0 360 720 4
45 90 0 180 360 4
A figura 4 representa a distribuição dos pontos da tabela sobre os setores dum disco e
o traçado do gráfico.
10

2 4
15
22,5
45
30
135
150
165
180
157,5
195
225
202,5
210
315
330
337.5
345
3.42,8
Figura 4:
1.5 Técnicas que facilitam o traçado do gráfico de uma curva
em coordenadas polares
O gráfico de F (r, θ) = 0 é formado por todos os pontos cujas coordenadas
polares satisfazem a equação. É comum apresentarmos a equação numa forma explícita,
isto é, r = f(θ).
Os seguintes procedimentos poderão nos auxiliar no esboço do gráfico:
1. calcular os pontos de máximo e/ou mínimos;
2. encontrar os valores de θ para os quais a curva passa pelo pólo;
3. verificar simetrias. Se:
(a) a equação não se altera quando substituirmos r por −r, existe simetria emrelação à origem;
(b) a equação não se altera quando substituirmos θ por −θ, existe simetria emrelação ao eixo polar, e;
11

(c) a equação não se altera quando substituirmos θ por π− θ, existe simetria em
relação ao eixo θ = π2( que é equivalente ao eixo dos y).
1.5.1 Exemplos
1. Esboçar a curva r = 2(1− cos θ).
Como a equação não se altera ao substituirmos θ por −θ, isto é
r = 2(1− cos θ) = 2(1− cos(−θ)),
concluímos que existe simetria em relação ao eixo polar. Logo, basta analisar
valores de θ tais que 0 ≤ θ ≤ π.
Para 0 ≤ θ ≤ π, encontramos um ponto de máximo (4, π) e um ponto de
mínimo (0, 0).
A Tabela 1 mostra alguns pontos da curva, cujo esboço é mostrado na Figura
4a.
Tabela 1θ r
0 0
π3
1
π2
2
2π3
3
π 4
-eixo polar
¢@@@
Figura 4a
Esboçar a curva r = 2cos 2θ.
Analisando as simetrias, temos que
(a) A curva é simétrica em relação ao eixo dos x, pois r = 2cos(−2θ) =2 cos 2θ.
12

(b) A curva é simétrica em relação ao eixo dos y, pois r = 2cos[2(π − θ)] =
2 cos(2π − 2θ) = 2 cos 2θ.Logo, basta fazer uma tabela para 0 ≤ θ ≤ π
2.
Em 0 ≤ θ ≤ π2, a curva passa pelo pólo quando θ = π
4, pois r = f
¡π4
¢=
2 cos 2 · π4= 2 cos π
2= 0.
Podemos ainda verificar que, para 0 ≤ θ ≤ π2, temos um ponto de máximo
(2, 0) e um ponto de mínimo (−2, π/2).Usando a Tabela 2 e os resultados anteriores, esboçamos a curva vista na
Figura 4b.
Tabela 2θ r
0 2
π6
1
π4
0
π3−1
π2−2
-
6
©©©©
©
©©©©
¡¡¡¡
¡¡
¡
¢¢¢¢¢
¢¢¢¢
eixo polar
θ = π2
θ = 0
θ = π6
θ = π4
θ = π3
Figura 4b
1.5.2 Algumas Equações em Coordenadas Polares e seus respectivos Gráfi-
cos.
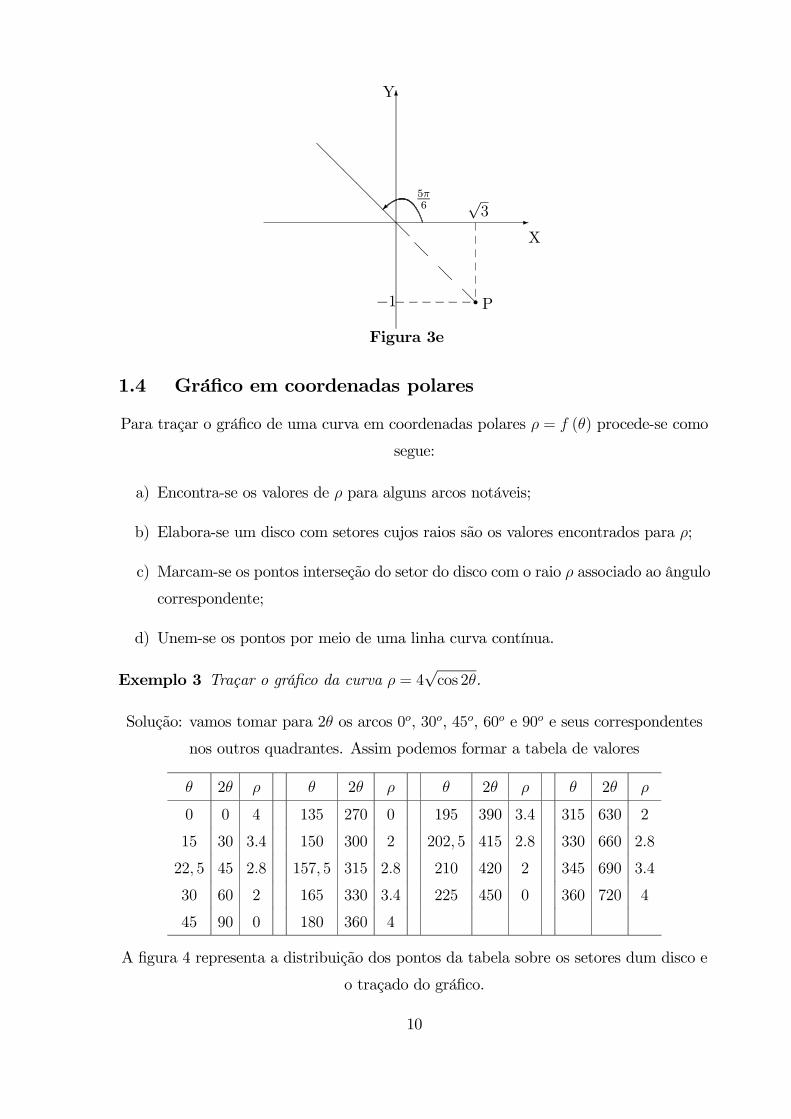
1.5.3 Equações de retas.
(a) θ = θ0 ou θ = θ0± nπ, n ∈ Z é uma reta que passa pelo pólo e faz um ângulo de θ0
ou θ0 ± nπ radianos com o eixo polar (ver Figura 4c).
13
-A
¢¢¢¢¢¢¢¢¢¢
¾ θ0
O
Figura 4c
(b) r sin θ = a e r cos θ = b, a, b ∈ <, são retas paralelas aos eixos polar eπ/2, respectivamente (ver Figuras 4d e 4e).
-A
6π2
a
[r sin θ = a, a > 0]
-A
6π2
a
[r sin θ = a, a < 0]Figura 4d
-A
π2 6
b
[r cos θ = b, b > 0]
-A
π2 6
b
[r cos θ = b, b < 0]Figura 4e
1.5.4 Circunferências.
(a) r = c, c ∈ < é uma circunferência centrada no pólo e raio |c| (ver Figura4f).
&%'$
-
Ao
Figura 4f
14

(b) r = 2a cos θ é uma circunferência de centro no eixo polar, tangente ao
eixo θ = π/2:
se a > 0, o gráfico está à direita do pólo;
se a < 0, o gráfico está à esquerda do pólo (ver Figura 4g).
&%'$
-
6
¡¡©y
A
π2
θ
P (r, θ)r(2a, 0)0
[r = 2a cos θ, a > 0]
&%'$
-
6π2
2a
[r = 2a cos θ, a <
Figura 4g
(c) r = 2b sin θ é uma circunferência de centro no eixo π/2 e que tangencia o
eixo polar:
se b > 0, o gráfico está acima do pólo;
se b < 0, o gráfico está abaixo do pólo (ver Figura 4h).
&%'$
-
6
A
π2
2b
0
[r = 2b sin θ, b > 0]
&%'$-
6
A
π2
[r = 2b sin θ, b < 0]
Figura 4h
1.5.5 Limaçons.
r = a± b cos θ ou r = a± b sin θ, onde a, b ∈ R são limaçons.
15

Temos,
se b > a, então o gráfico tem um laço (ver Figura 4i);
-
6
eixo polar
π2
r = a+ b cos θ
-
6
eixo polar
π2
r = a+ b sin θ
Figura 4i
se b = a, então o gráfico tem o formato de um coração, por isso é conhecido
como Cardióide (ver Figura 4j);
-
6
eixo polar
π2
r = a(1 + cos θ)
16

-
6
eixo polar
π2
r = a(1 + sin θ)
Figura 4j
se b < a, então o gráfico não tem laço (ver Figura 4l).
-
6
r = a+ b cos θ
eixo polar
-
6
eixo polar
π2
r = a+ b sin θ
Figura 4l
Observamos que na Figura 4i usamos a = 1 e b = 2, na Figura 4j usamos
a = b = 1 e na Figura 4l usamos a = 3 e b = 2.
17

r = a cosnθ ou r = a sinnθ, onde a ∈ R e n ∈ N são rosáceas:se n for par temos uma rosácea de 2n pétalas (ver Figura 4m);
-
6
eixo polar
π2
r = a cosnθFigura 4m
e n for ímpar a rosásea terá n pétalas (fig 4n)
-
6
eixo polar
π2
r = a sinnθFigura 4n
1.5.6 Lemniscatas.
r2 = ±a2 cos 2θ ou r2 = ±a2 sin 2θ, onde a ∈ < são lemniscatas (ver Figura 4o).
18

-
6
¡¡¡¡¡
@@
@@
@
@@@@@
¡¡
¡¡
¡
θ = π4θ = 3π
4
eixo polar
π2
r2 = a2 cos 2θ
-
6
¡¡¡¡¡
@@
@@
@
@@@@@
¡¡
¡¡
¡
θ = π4θ = 3π
4
eixo polar
π2
r2 = a2 cos 2θFigura 4o
Observamos que na Figura 4o usamos a = 1.
1.5.7 Espirais.
As equações seguintes representam algumas espirais:
(a) rθ = a, a > 0
(b) r = aθ, a > 0
(c) r = eaθ
(d) r2 = θ
As Figuras 4p a 4r ilustram estas espirais.
19

-
6π2
eixo polar
rθ = a (θ > 0)
(a, π2)
Figura 4p
-
6
eixo polar
r = aθ (θ ≥ 0)Figura 4q
π2
-
6
eixo polar
r =√θ
π2
Figura 4r
20

1.6 EXERCÍCIOS
1. Marcar os seguintes pontos no sistema de coordenadas polares.
a) P1(4, π/4) b) P2(4,−π/4)c) P3(−4, π/4) d) P4(−4,−π/4)
2. Marcar os seguintes pontos no sistema de coordenadas polares e encontrar suas
coordenadas cartesianas.a) P1(3, π/3) b P2(−3, π/3)c P3(3,−π/3) d P4(−3,−π/3)
3. Encontrar as coordenadas cartesianas dos seguintes pontos dados em coordenadas
polares.
a) (−2, 2π/3) b) (4, 5π/8)
c) (3, 13π/4) d) (−10, π/2)e) (−10, 3π/2) f) (1, 0)
4. Encontrar um par de coordenadas polares dos seguintes pontos:
a) (1, 1) b) (−1, 1)c) (−1,−1) d) (1,−1)
5. Usar os valores dados abaixo para r e θ para descrever os pontos P1(√3,−1) e
P2(−√2,−√2), em coordenadas polares.
a) r > 0 e 0 ≤ θ < 2π; b) r < 0 e 0 ≤ θ < 2π;
c) r > 0e− 2π < θ ≤ 0; d) r < 0 e − 2π < θ ≤ 0;6. Escrever as equações abaixo em coordenadas polares
a) x2 + y2 = 4 b) x = 4
c) y = 2 d) y + x = 0
e) x2 + y2 − 2x = 0 f) x2 + y2 − 6y = 0
7. escrever em coordenadas retangulares as equações
a) r = cos θ b) r = 2senθ
c) r = 1senθ+cos θ
d) r = a; a > 0
21

Respostas
2a) (32, 3√32) 5a) P1(2,
11π6); P2
¡2, 5π
4
¢2b) (−3
2,−3
√32) 5b) P1(−2, 5π6 ); P2
¡−2, π4
¢2c) (3
2,−3
√32) 5c) P1(2,
π6); P2
¡2, −3π
4
¢2d) (−3
2, 3√32) 5d) P1(−2,−7π6 ); P2
¡−2,−7π4
¢3a) P1(1,−
√3) 6a) r = ±2
3b) (−1.5307, 3.6955) 6b) r cos θ = 4
3c) (−3√2
2, −3
√2
2) 6c) rsenθ = 2
3d) (0,−10) 6d θ = π4+ kπ; k ∈ Z
3e) (0, 10) 6e) r = 2 cos θ
3f) (1, 0) 6f) r = 6senθ
4a)¡√2, π
4
¢7a) x2 + y2 − x = 0
4b)¡√2, 3π
4
¢7b) x2 + y2 − 2y = 0
4c)¡√2, 5π
4
¢7c) x+ y = 1
7d) x2 + y2 = a2
22

1.7 Sistemas de coordenadas no R3
Além do sitema de coordenadas cartesianas retangulares, três outros sistemas
são freqüentemente empregados para localizar pontos no espaço. São eles: sistema de
coordenadas polares, sistema de cilíndricas e sistema de esféricas.
Sistema de coordenadas retangulares ortogonais
Um ponto P (x, y, z) é localizado no R3 conforme a representação gráfica
vista na figura 4r
-
6
©©©©©©©©©©¼
©©©©
©©©©
©©
©©
©©
©©
©©
©©
Y
Z
X
P (x, y, z)
O
Figura 4r
Note que qualquer ponto noR3 está localizado num dos vértices do paralelepípedo
que tem um dos vértices na origem do sistema, abscissa x, ordenada y e cota z.
1.7.1 Coordenadas polares no espaço tridimensional
As coordenadas polares do ponto P no espaço, Fig. 4s, são (r, α, β, γ), onde
r, raio vetor, designa a distância OP e α, β e γ são ângulos diretores de OP . As relações
entre coordenadas polares e retangulares do ponto P são:
23

-
6
©©©©©©©©©©¼
©©©©
©©©©
©©
©©
©©
©©
©©
©©
Y
Z
X
P (x, y, z)(r, α, β, γ)
rr
¼³®©α
βγ
O
Figura 4s
x = r cosα
y = r cosβ
z = r cos γ.
(3)
r = ±px2 + y2 + z2,
cosα = xr,
cosβ = yr,
cos γ = zr, r 6= 0.
(4)
Uma vez que cos2 α+cos2 β+cos2 γ = 1, as quatro coordenadas não são independentes.
Exemplo 4 Para α = 60◦ e β = 45◦, temos cos2 γ = 1−cos2 α−cos2 β = 1− 14− 12= 1
4.
Da condição γ ≤ 180◦ deduz-se: γ = 60◦ ou 120◦.
Exemplo 5 As coordenadas polares do ponto P (1,−2, 2) são determinadas como segue:
Solução: da equação 4 obtemos
24

r =px2 + y2 + z2 =
p12 + (−2)2 + 22 = √9 = 3.
α = arccos xr= arccos 1
3= 70◦320
β = arccos yr= arccos
¡−23
¢= 131◦490
γ = arccos zr= arccos 2
3= 48◦110.
Resposta: Têm-se P (1,−2, 2) = P (3, 70◦320, 131◦490, 48◦110).
Exemplo 6 As coordenadas cartesianas do ponto, cujas coordenadas polares são (3, 120◦, 120◦, 135◦)
são determinadas como segue:
Solução: das equações 4 obtêm-se:
x = r cosα = 3 cos 120◦ = −32,
y = r cosβ = 3 cos 120◦ = −32,
z = r cos γ = 3 cos 135◦ = −3√22.
Portanto, P (3, 120◦, 120◦, 135◦) = P³−32,−3
2,−3
√22
´.
1.8 Coordenadas Cilíndricas
Marcar um ponto em coordenadas cilíndricas consiste em marcá-lo sobre a
superfície de um cilindro. Na base do cilindro, a representação das coordenadas do ponto
é equivalente à representação das coordenadas polares e a cota é a altura no eixo z. Seja
P (x, y, z) um ponto em coordenadas retangulares sua representação em coordenadas
cilíndricas será P (r cos θ, rsenθ, z) em que:x = r cos θ
y = rsenθ
z = s
r2 = x2 + y2 e θ = arctg yx
(5)
Veja a figura 5
25

P(x,y,z)
rx
y
θ
Figura 5: P (x, y, z) = P (r cos θ, rsenθ, z)
A equivalência entre as coordenadas retangulares e cilíndricas é dada por
x = r cos, y = rsenθ e z = z. Além disso, tem-se r2 = x2+y2, tgθ = yxe θ = arctg
¡yx
¢.
Exemplo 7 O ponto P (3, 3, 5) quando escrito em coordenadas cilíndricas tem a forma
P¡3 cos π
4, 3senπ
4, 5¢.
Exemplo 8 As coordenadas cilíndricas do ponto P (1,−2, 2) são determinadas comosegue:
Solução: da equação 5 obtemos
r =px2 + y2 =
p12 + (−2)2 = √5.
θ = arctan yx= arctan(−2
1) = arct(−2) = 296◦340,
z = 2.
Resposta: (√5, 296◦340, 2).
Exemplo 9 As coordenadas cartesianas ortogonais do pontoP (6, 120◦,−2) dado em co-ordenadas cilíndricas são determinadas como segue a solução:
Das equações 5 obtem-se:
x = r cos θ = 6 cos 120◦ = −3,y = r sin θ = 6 sin 120◦ = 3
√3,
z = −2.
Portanto, P (6, 120◦,−2) = P (−3, 3√3,−2).
26

xy
z
P(x,y,z)
O
Q
θ
φρ
T
Figura 6: Ponto P (x, y, z) representado sobre a superfície esférica.
1.9 Coordenadas esféricas
Seja P (x, y, z) um ponto qualquer do espaço e Q, sua projeção no plano xy.
Seja de ρ a distância OP conforme a figura 6. Designemos o ângulo [TOP por φ. Note
que o ângulo φ tem origem no pólo norte e se desloca positivamente na direção do pólo
sul, de modo que varia de π2≤ φ ≤ −π
2. Seja θ o ângulo\XOQ em que 0 ≤ θ ≤ 2π. Os
elementos ρ, θ e φ são denominadas coordenadas esféricas do ponto P e denotado por
P (ρ, θ, φ); ρ é o raio da esfera, θ é a longitude e φ é a co-latitude de P . Para marcar o
ponto P (ρ, θ, φ) sobre a superfície esférica prodede-se como segue:
• Faz-se o esboço de uma esfera de raio ρ;
• Sobre seu centro representa-se os eixos x, y e z;
• Partindo do eixo x desloca-se θ radianos sobre o equador no sentido positivo;
• Descreve-se o meridiano que parte do pólo norte e passa pela extremidade do arcoθ;
• A partir do pólo norte (sobre o meridiano já traçado) descreve-se o ângulo φ;
• Na extremindade do arco φ localiza-se o ponto P .
1.9.1 Relações entre as coordenadas retangulares e esféricas
Considere o triângulo OXQ localizado sobre a figura 6. Então pode-se escr-
ever:
27

x = OQ cos θ
y = OQsenθ(6)
Considerendo o triângulo OQP pode-se escreve: OQ = ρsenφ
z = QP = OT = ρ cosφ(7)
Substituindo o OQ da equação 7 na equação 6 e adicionando a componente
z obtem-se o sistema de coorenadas esféricas dado por:x = ρ cos θsenφ
y = ρsenθsenφ
z = ρ cosφ
(8)
Além disso, valem as relaçõesρ2 = x2 + y2 + z2
tgθ = yxdonde vem θ = arctg y
x
cosφ = zρ, donde vem φ = arccos z
ρ
(9)
Exemplo 10 As coordenadas esféricas do ponto P (1,−2, 2) são determinadas comosegue:
Solução: das equações 8 e 9 vem:
ρ =px2 + y2 + z2 =
p12 + (−2)2 + 22 = √9 = 3.
1. θ = arctan yx= arctan−2 = 296◦340,
φ = arccos zr= arccos 2
3= 48◦110,
Portanto. P (1,−2, 2) = P (3, 296◦340, 48◦110).
Exemplo 11 As coordenadas retangulares do ponto de coordenadas esféricas (4,−45◦, 30◦)são determinadas como segue:
28

Solução: da equação 8 obtêm-se
x = ρ sinφ cos θ = 4 sin 30◦ cos(−45◦) = √2,y = ρ sinφ sin θ = 4 sin 30◦ sin(−45◦) = −√2,
z = ρ cosφ = 4cos 30◦ = 2√3.
Portanto, P (4,−45◦, 30◦) = P (√2,−√2, 2√3).
1.9.2 Outros exemplos
Exemplo 12 Determinar as coordenadas cartesianas, polares e esféricas de um ponto,
cujas coordenadas cilíndricas são (6, 120◦, 4).
Solução: — Em coordenadas retangulares obtem-se:
x = r cos θ = 6 cos 120◦ = −3,y = r sin θ = 6 sin 120◦ = 3,
z = 4.
Portanto, P (6, 120◦, 4) = P (−3, 3√3, 4).
Em coordenadas polares.
r =px2 + y2 + z2 =
q(−3)2 + (3√3)2 + 42 = 2√13.
α = arccos xr= arccos −3
2√13= 114◦350,
β = arccos yr= arccos 3
√3
2√13= 46◦70,
γ = arccos zr= arccos 4
2√13= 56◦190.
Portanto, P (6, 120◦, 4) = P (2√13, 114◦350, 46◦70, 56◦190).
Em coordenadas esféricas obtêm-se
ρ =px2 + y2 + z2 =
q(−3)2 + (3√3)2 + 42 = 2√13
θ = arctan yx= arctan 3
√3
−3 = 120◦,
φ = arccos zr= arccos 4
2√13= 56◦190,
Portanto, P (6, 120◦, 4) = P (2√13, 120◦, 56◦190).
29
Exemplo 13 Escrever a equação x2 + y2 + 2z2 − 2x− 3y − z + 2 = 0 em coordenadas
cilíndricas.
Solução: da equação 5 temos x = r cos θ, y = r sin θ e z = z.
Substituindo x, y e z da equação x2 + y2 + 2z2 − 2x − 3y − z + 2 = 0 por
x = r cos θ, y = r sin θ e z = z vem
r2 cos2 θ + r2 sin2 θ + 2z2 − 2r cos θ − 3r sin θ − z + 2 = 0.
r2¡cos2 θ + sin2 θ
¢− r(2 cos θ + 3 sin θ) + 2z2 − z + 2 = 0.
r2 − r(2 cos θ + 3 sin θ) + 2z2 − z + 2 = 0
Exemplo 14 Escrever a equação 2x2 + 3y2 − 6z = 0 em coordenadas esféricas.
Solução: das equações 8 e 9 têm-se x = ρ sinφ cos θ, y = ρ sinφ sin θ e
z = ρ cosφ.
Substituindo os valores de x, y e z na equação 2x2 + 3y2 − 6z = 0 obtemos
2ρ2 sin2 φ cos2 θ + 3ρ2 sin2 φ sin2 θ − 6ρ cosφ = 0
ou
2ρ sin2 φ cos2 θ + 3ρ sin2 φ sin2 θ − 6 cosφ = 0Exercício 15 Escrever a equação ρ+ 6 sinφ cos θ + 4 sinφ sin θ− 8 cosφ = 0, em coor-
denadas retangulares.
Solução: pelo fato de existir os produtos sinφ cos θ e sinφ sin θ sabemos que
a equação está escrita em coordenadas esféricas. Assim, para obter ρ2, multiplica-se a
equação dada por ρ obtendo-se
ρ2 + 6ρ sinφ cos θ + 4ρ sinφ sin θ − 8ρ cosφ = 0substituindo-se adequadamente por x, y e z conforme as equações 8 e 9
obtêm-se
x2 + y2 + z2 + 6x+ 4y − 8z = 0
Esta é a equação de uma esfera com centro em (−3,−2, 4) e raio r = √29.
30

Exemplo 16 Escrever a equação z = r2 cos 2θ, expressa em coordenadas cilíndricas em
cartesianas ortogonais.
Solução: da trigonometria sabemos que cos 2θ = cos2 θ−sin2 θ. Logo podemosescrever
z = r2(cos2 θ − sin2 θ)ou
z = r2 cos2 θ − r2 sin2 θ
Como r cos θ = x e r sin θ = y, a equação desejada é
z = x2 − y2
.
.
Exemplo 17 Escrever a equação x2 + y2 − z2 = 25 em uma equação do sistema polar.
Solução: em coordenadas polares, temos x = r cosα, y = r cosβ, z = r cos γ.
Portanto, a equação x2 + y2 − z2 = 25 se transforma em
r2 cos2 α+ r2 cos2 β − r2 cos2 γ = 25
ou
r2(cos2 α+ cos2 β − cos2 γ) = 25.Sendo cos2 α+ cos2 β + cos2 γ = 1 vem
r2(1− 2 cos2 γ) = 25.Que é a equação solicitada.
Exemplo 18 Escrever a equação cos γ = r cosα cosβ, dada em coordenadas polares,
no sistema cartesiano ortogonal.
Solução: multipliquemos ambos os membros da equação dada por r. Teremos
r cos γ = r2 cosα cosβ. Como r cos γ = z, r cosα = x e r cos β = y, a equação pedida é
z = xy.
31
1.10 EXERCÍCIOS
1. Determinar as coordenadas polares dos seguintes pontos:
(a) (0, 1, 1)
(b) (0,−2,−2)(c) (1,−2, 2)(d) (6, 3, 2)
(e) (8,−4, 1)
2. Determinar as coordenadas cilíndricas dos pontos do problema 1.
3. Determinar as coordenadas esféricas do problema1.
4. Determinar as coordenadas retangulares dos pontos, cujas coordenadas polares
são:
(a) (2, 90◦, 30◦, 60◦)
(b) (3, 60◦,−45◦, 120◦)(c) (4, 120◦, 120◦, 135◦)
(d) (3, 150◦, 60◦, 90◦)(e) (2, 45◦, 120◦,−60◦)
5. Determinar as coordenadas ortogonais dos pontos, cujas coordenadas cilíndricas
são:
(a) (6, 120◦,−2)(b) (1, 330◦,−2)
(c) (4, 45◦, 2)
(d) (8, 120◦, 3)(e) (6, 30◦,−3)
6. Determinar as coordenadas retangulares dos pontos, cujas coordenadas esféricas
são:
(a) (4, 210◦, 30◦)
(b) (3, 120◦, 240◦)
(c) (6, 330◦, 60◦)
(d) (5, 150◦, 210◦)(e) (2, 180◦, 270◦)
7. Determinar as coordenadas esféricas dos pontos, cujas coordenadas cilíndricas são:
(a) (8, 120◦, 6)
(b) (4, 30◦,−3)(c) (6, 135◦, 2)
(d) (3, 150◦, 4)(e) (12,−90◦, 5)
8. Transformar as seguintes equações nas correspondentes do sistema esférico.
(a) 3x2 − 3y2 = 8z (b) x2 − y2 − z2 = a2 (c) 3x+ 5y − 2z = 6
9. Transformar as coordenadas retangulares das equações dadas em coordenadas
cilíndricas:
(a) 5x+ 4y = 0
(b) 5x2 − 4y2 + 2x+ 3y = 0(c) x2 + y2 − 8x = 0(d) x2 − y2 + 2y − 6 = 0
(e) x2 + y2 − z2 = a2
32

10. As superfícies dadas por suas equações estão expressas em coordenadas cilíndricas.
Escrevê-las no sistema cartesiano ortogonal e identificá-las.
(a) r2 + 3z2 = 36
(b) r = a sin θ
(c) r2 + z2 = 16
(d) θ = 45◦(e) r2 − z2 = 1
11. Referir ao sistema polar os lugares das seguintes equações cartesianas.
(a) x2 + y2 + 4z = 0
(b) x2 + y2 − z2 = a2
(c) 2x2+3y2+2z2−6x+2y = 0(d) z = 2xy
12. Transformar as seguintes equações, dadas em coordenadas esféricas, em equações
de coordenadas retangulares:
(a) r = 5a cosφ
(b) θ = 60◦
(c) r sinφ = a
(d) r = 4
13. Transformar as seguintes equações polares em equações cartesianas retangulares:
(a) r(cosα+ cosβ + cos γ) = 5
(b) r2(2 cos2 α− 1) = 25(c) cos γ = r(cos2 α− cos2 β)(d) r2 − r2 cos2 γ − 4r cos γ − 2 = 014. Instituir uma fórmula para o cálculo da distância entre dois pontos P1(r1, θ1, φ1),
P2(r2, θ2, φ2) no sistema de coordenadas esféricas.
Sugestão. Utilizar a fórmula da distância entre dois pontos expressa em coorde-
nadas retangulares e transformá-la para coordenadas esféricas.
33

RESPOSTAS
34

(1a) (√2, 90◦, 45◦, 45◦)
(1b) (2√2, 90◦, 135◦, 135◦)
(1c) (3, arccos(1/3), arccos(−2/3), arccos(2/3))(1d) (7, arccos(6/7), arccos(3/7), arccos(2/7))
(1e) (9, arccos(8/9), arccos(−4/9), arccos(1/9))(2a) (1, 90◦, 1)
(2b) (2, 270◦,−2)(2c) (
√5, 2π − arctan(1/2), 2)
(2d) (3√5, arctan(1/2), 2)
(2e) (4√5, 2π − arctan 2, 1)
(3a) (√2, 90◦, 45◦)
(3b) (2√2, 270◦, 135◦)
(3c) (3, 2π − arctan 2, arccos(2/3))(3d) (7, arctan(1/2), arccos(2/7))
(3e) (9, 2π − arctan(1/2), arccos(1/9))(4a) (0,
√3, 1)
(4b) (3/2, 3√2/2,−3/2)
(4c) (−2,−2,−2√2)(4d) (−3√3/2, 3/2, 0)(4e) (
√2,−1, 1)
(5a) (−3, 3√3,−2)(5b) (
√3/2,−1/2,−2)
(5c) (2√2, 2√2, 2)
(5d) (−4, 4√3, 3)(5e) (3
√3, 3,−3)
(6a) (−√3,−1, 2√3)(6b) (3
√34,−9
4,−3
2)
(6c) (92,−3
√32, 3) 35

(6d) (5√34,−5
4,−5
√32)
(6e) (2, 0, 0)
(7a) (10, 120◦, arccos(3/5))
(7b) (5, 30◦, arccos(−3/5))(7c) (2
√10, 135◦,
√10/10)
(7d) (5, 150◦, arccos(4/5))
(7e) (13,−90◦, arccos(5/13))(8a) 3r sin2 φ cos 2θ = 8 cos θ
(8b) r2(sin2 φ cos 2θ − cos2 φ) = a2
(8c) r(3 sinφ cos θ + 5 sinφ sin θ − 2 cosφ) = 6(9a) θ = arctan(−5/4)(9b) 5r cos2 θ − 4r sin2 θ + 2 cos θ + 3 sin θ = 0(9c) r − 8 cos θ = 0(9d) r2 cos 2θ + 2r sin θ − 6 = 0(9e) r2 − z2 = a2
(10a) x2 + y2 + 3z2 = 36. Elipsóide de revolução.
(10b) x2 + y2 = ay. Cilindro circular reto.
(10c) x2 + y2 + z2 = 16. Esfera.
(10d) y = x. Plano.
(10e) x2+y2−z2 = 1. Hiperbolóide de uma folha.(11a) r(cos2 α+ cos2 β) + 4 cos γ = 0 ou
r(1− cos2 γ) + 4 cos γ = 0(11b) r2(1− 2 cos2 γ) = a2
(11c) r(2 + cos2 β)− 6 cosα+ 2 cosβ = 0(11d) cos γ = 2r cosα cosβ
(12a) x2 + y2 + z2 = 5az
(12b) y =√3x
(12c) x2 + y2 = a2
(12d) x2 + y2 + z2 = 16
36

(13a) x+ y + z = 5
(13b) x2 − y2 − z2 = 25
(13c) z = x2 − y2
(13d) x2 + y2 − 4z − 2 = 0(14)
pr21 + r22 − 2r1r2[cos(θ2 − θ1) sinφ1 sinφ2 + cosφ1 cosφ2] = d
37

2 Sistemas de coordenadas auxiliares
Um dos principais objetivos da Geometria Analítiva é a determinação das
propriedades das curvas e suas configuações geométricas. Algumas, tais como parábolas,
elipses, hipérboles, circunferências, retas etc têm equações padronizadas num determi-
nado sistema de coordenadas convencional de centro na origem. Isso permite traçar
o esboço gráfico dessas curvas facilmente. Porém, no caso das curvas estarem fora da
origem, busca-se um sistema auxiliar de coordenadas com objetivo de reconhecer e es-
boçar tais curvas sem passar por um trabalho exaustivo. Um sistema auxiliar permite
simplificar as equações e representá-las num dos modelos padronizados. Na sequência
veremos alguns casos de sistemas auxiliares.
2.1 Transformação de Coordenadas
Como o nome já diz, uma transformação é o processo de mudar uma relação,
expressão ou figura em outra.
Assim, pode-se afirmar que uma tranformação é uma operação por meio da
qual uma relação, expressão ou figura é mudada em outra de acordo com uma dada lei.
Em geral uma transformação de coordenadas consiste na busca de um sistema ortogonal
em que se possa escrever uma dada curva na equação padronizada. Veja a figura 6a em
que o sitema usual é o sistema cartesiano de eixos coordenados X e Y e centro (0, 0).
Pelo ponto (h, k) é traçado o sistema auxiliar cujos eixos coordenados são X 0 e Y 0. A
interseção dos eixos X 0 e Y 0 é tomada como a origem do sistema auxiliar. A figura 6a
representa o ponto P (x, y) transladado para o sistema X 0Y 0 de centro O0(h, k).
38

-
6
O X
Y
O h
k
O
P (x0, y0) = P (x− h, y − k)tO’(h,k)
Y’
y’y
x
x’
6
X’
6
-
Figura 6a
Como pode ser observado, comparando o sistema auxiliar com o sitema usual
pode-se afirmar que:
Se os eixos coordenados O (0, 0) são transladados para uma nova origem
O0(h, k), então um ponto qualquer P (x, y) antes e depois da translação, terá (x0, y0)
após a translação e as equações de que relacionam as coordenadas antigas com novas
coordenadas são dadas por
x = x0 + h
y = y0 + kou
x0 = x− h
y0 = y − k(10)
Exemplo 19 Consideremos uma circunferência de raio r e centro C (h, k) cuja equação
na forma padrão no sistema de centro O (0, 0) é dada por
(x− h)2 + (y − k)2 = r2
-
6
O X
Y
&%'$O’(h,k)
Y’
X’
6
-
Pr
Figura 6b39

Se a equação desta circunferência for mudada, por uma translação de coordenadas cuja
origem será O0(h, k), então assumirá a forma canônica mais simples dada por
x0 2 + y0 2 = r2. (11)
Exemplo 20 Transformar a equação
x3 − 3x2 − y2 + 3x+ 4y − 5 = 0 (12)
por meio de uma translação dos eixos coordenados à nova origem (1, 2). Desenhar o
lugar geométrico e mostrar ambos os conjuntos de eixos.
Solução: da equação 10 obtemos
x = x0 + 1 e y = y0 + 2
Substituindo x e y na equação 12 obteremos
(x0+1)3− 3(x0+1)2− (y0+2)2+3(x0+1)+ 4(y0+2)− 5 = 0.
Desenvolvendo e simplificando esta última equação obtemos a
equação transformada procurada
x03 − y02 = 0. (13)
O lugar geométrico, uma parábola semi-cúbica, está represen-
tado na Fig. 6c.
O
O’
1
2
X
Y
-
6
-
6
X’
Y’
Figura 6c
40

Exemplo 21 Por meio de uma translação dos eixos coordenados transformar a equação
x2 − 4y2 + 6x + 8y + 1 = 0 em outra equação desprovida de termos do primeiro grau.
Desenhar o lugar geométrico e mostrar ambos os conjuntos de eixos.
Solução: neste caso particular podemos usar dois métodos diferentes, o
primeiro sendo o mais geral.
Primeiro método. Substituindo na equação x2 − 4y2 + 6x+ 8y + 1 = 0 osvalores de x e y por x0+ h e y0+ k, respectivamente, obtemos a equação transformada
(x0 + h)2 − 4(y0 + k)2 + 6(x0 + h) + 8(y0 + k) + 1 = 0
que, após expansão e redução de termos semelhantes assume a forma
x02 − 4y02 + (2h+ 6)x0 − (8k − 8)y0 + h2 − 4k2 + 6h+ 8k + 1 = 0. (14)
Uma vez que a equação transformada deve ser desprovida de termos do
primeiro grau, fazemos iguais a zero os coeficientes de x0 e y0 na equação 14. Assim
temos:
2h+ 6 = 0 e 8k − 8 = 0
donde
h = −3 e k = 1.
Logo, a nova origem é o ponto (−3, 1). Sesubstituirmos estes valores de h e k em (13)
obtemos a equação procurada
x02 − 4y02 − 4 = 0. (15)
O lugar geométrico, uma hipérbole, está
representado na Fig. 6d.
41

-
6
bX
Y
-
6
X’
Y’
OO’
−31
Figura 6d
Segundo método. No caso de equações do segundo grau desprovidas do
termo em xy é possível efetuar a transformação pelo método de completar os quadrados.
Assim, os termos da equação x2−4y2+6x+8y+1 = 0 podem ser reagrupados na forma
(x2 + 6x)− 4(y2 − 2y) = −1.
Então completando os quadrados, obtemos
(x2 + 6x+ 9)− 4(y2 − 2y + 1) = −1 + 9− 4donde
(x+ 3)2 − 4(y − 1)2 = 4 (16)
Se na equação 15 fizermos as substituições
x+ 3 = x0 y − 1 = y0
obteremos de imediato a equação procurada x02 − 4y02 = 4. Obviamente, de16, temos as equações de transformação
x = x0 − 3 e y = y0 + 1.
Nesse caso, o tipo de simplificação desejada é especificado; em caso contrário,
procuramos efetuar o maior número de simplificações possíveis. Tal está ilustrado no
exemplo seguinte.
42

Exemplo 22 Por uma translação dos eixos coordenados, simplificar a equação
y2 − 4x− 6y + 17 = 0. (17)
Solução: primeiro método: substituímos na equação 17 os valores de x e y dados
pelas equações de transformação 10. Temos então
(y0 + k)2 − 4(x0 + h)− 6(y0 + k) + 17 = 0
que pode ser escrita na forma
y02 − 4x0 + (2k − 6)y0 + k2 − 4h− 6k + 17 = 0. (18)
Nossa próxima etapa é determinar os valores de h e k que simplificarão a
equação 18. Podemos eliminar o termo em y0, mas não podemos eliminar o termo em
x0 uma vez que seu coeficiente é −4. Neste caso, porém, podemos eliminar o termoconstante. Em conseqüência escrevemos
2k − 6 = 0 e k2 − 4h− 6k + 17 = 0donde
k = 3 e h = 2.
Para estes valores de h e k a equação 18 se reduz à forma procurada
y02 − 4x0 = 0.
43

2.2 Exercícios
1. Em cada um dos exercícios, transformar a equação dada por translação dos eixos
coordenados para a nova origem indicada.
(a) x2 + y2 + 2x− 6y + 6 = 0; (−1, 3).(b) 3x2 + 2y2 + 12x− 4y + 8 = 0; (−2, 1).(c) 4x2 − y2 − 8x− 10y − 25 = 0; (1,−5).(d) y3 − x2 + 3y2 − 4x+ 3y − 3 = 0; (−2,−1).(e) xy − 3x+ 4y − 13 = 0; (−4, 3).2. Em cada um dos exercícios, por uma translação dos eixos coordenados, transformar
a equação dada em outra desprovida de termos do primeiro grau. Usar o primeiro
método de exemplo 2 ilustrativo.
(a) 2x2 + y2 + 16x− 4y + 32 = 0.(b) 3x2 + 2y2 + 18x− 8y + 29 = 0.(c) 3x2 − 2y2 − 42x− 4y + 133 = 0.(d) xy − x+ 2y − 10 = 0.(e) 8x3 + 24x2 − 4y2 + 24x− 12y − 1 = 0.3. Em cada um dos exercícios, por uma translação dos eixos coordenados, transformar
a equação dada em outra desprovida de termos do primeiro grau. Usar o segundo
método do exemplo 2 ilustrativo.
(a) 4x2 + 4y2 + 32x− 4y + 45 = 0.(b) 2x2 + 5y2 − 28x+ 20y + 108 = 0.(c) x2 − 3y2 + 6x+ 6y + 3 = 0.(d) 12x2 + 18y2 − 12x+ 12y − 1 = 0.(e) 12x2 − 18y2 − 12x− 12y − 5 = 0.4. Em cada um dos exercícios, simplificar a equação dada por uma translação dos
eixos coordenados.
(a) x2 + 8x− 3y + 10 = 0.(b) 16x2 + 16y2 + 8x− 48y + 5 = 0.(c) 72x2 + 36y2 − 48x+ 36y − 55 = 0.
44

(d) y2 − 6x2 − 24x− 2y − 32 = 0.(e) 30xy + 24x− 25y − 80.
2.2.1 Respostas
(1a) x02 + y02 = 4.
(1b) 3x02 + 2y02 = 6.
(1c) 4x02 − y02 = 4.
(1d) y03 − x02 = 0.
(1e) x0y0 = 1.
(2a) 2x02 + y02 = 4.
(2b) 3x02 + 2y02 = 6.
(2c) 3x02 − 2y02 = 12.(2d) x0y0 = 8.
(2e) 2x03 − y02 = 0.
(3a) x02 + y02 = 5.
(3b) 2x02 + 5y02 = 10.
(3c) x02 − 3y02 = 3.(3d) 2x02 + 3y02 = 1.
(3e) 2x02 − 3y02 = 1(4a) x02 − 3y0 = 0.(4b) x02 + y02 = 2.
(4c) 2x02 + y02 = 2.
(4d) y02 − 6x02 = 9.(4e) x0y0 = 2.
45

3 Rotação dos eixos coordenados
Considere a curva de equação 3x2−2xy+3y2−2x−10y+9 = 0 cujo esboço érepresentado na figura 7. Como a equação apresenta o termo xy não é possível reduzi-la
à equação padrão no sistema cartesiano convencional. Além disso, não basta efetuar uma
translação de coordenadas. Para que se tenha um sistema de eixos ortogonal passando
pelo centro da curva é necessário uma translação de eixos seguida de uma rotação dos
eixos transladados como apresentado na figura 7.
X
Y X'
Y'
θh
k θ
Figura 7:
Na sequência descreveremos o processo para rotacionar eixos. Considere a
figura 8
46

φ
θx
y
x'y'
P'(x',y') = P(x,y)
O X
Y'
X'
Y
Figura 8:
Os eixos X e Y sofreram uma rotação θ dando origem aos eixos X 0 e Y 0,
também ortogonais. Nosso trabalho é encontrar as relações entre as coordenadas (x, y)
e (x0, y0), obtido após a rotação dos eixos. Considere o triângulo retângulo Ox0P . As
relações trignométricas são: x0 = r cosφ
y0 = rsenφ(19)
Considere o triângulo retângulo OxP e seja α = (θ + φ). Então as relações
trigonométricas são: x = r cos(θ + φ)
y = rsen(θ + φ)(20)
Desenvovendo as equações 20 vem
x = r(cos θ cosφ− senθsenφ) e y = r(senθ cosφ+ senφ cos θ)
ou ou
x = (r cosφ) cos θ − (rsenφ)senθ) y = (r cosφ)senθ + (rsenφ) cos θ)
Substituindo pelos valores de 19 vem
x = x0 cos θ − y0senθ) y = x0senθ + y0 cos θ)
47

Portanto, após a rotação dos eixos têm-se:
x = x0 cos θ − y0senθ)
y = x0senθ + y0 cos θ)(21)
Observação 23 Para obter o resultado desejado será necessário girar os eixos coor-
denados apenas de um ângulo com valor suficiente para estabelecer um novo sistema
ortogonal passando pelo centro da curva em estudo. Geralmente, os valores de ângulo
de rotação θ pertencem ao intervalo dado por 0◦ ≤ θ < 90◦.
Exemplo 24 Transformar a equação
2x2 +√3xy + y2 = 4 (22)
por meio da rotação dos eixos coordenados em um ângulo de 30◦. Desenhar o lugar
geométrico e mostrar ambos os conjuntos de eixos.
Solução: usando 21 obtém-se as equações da transformação
x = x0 cos 30◦ − y0 sin 30◦ =√32x0 − 1
2y0
y = x0 sin 30◦ + y0 cos 30◦ = 12x0 +
√32y0.
Se estes valores de x e y são substituídos na equação 22 obtemos
2³√
32x0 − 1
2y0´2+√3³√
32x0 − 1
2y0´³
12x0 +
√32y0´
+³12x0 +
√32y0´2= 4.
Desenvolvendo e simplificando esta última equação obtemos a equação trans-
formada pedida
5x02 + y02 = 8. (23)
48

O lugar geométrico dos pontos dessa equação é mostrado na figura 8a
-
6
X
Y
O©©©©©©©©©
A
A
A
A
A
A
*X’
KY’
30◦
Figura 8a
Exemplo 25 Por meio de uma rotação dos eixos coordenados transformar a equação
9x2 − 24xy + 16y2 − 40x− 30y = 0 (24)
em outra equação desprovida do termo x0y0. Desenhar o lugar geométrico e mostrar
ambos os conjuntos de eixos.
Solução: substituindo na equação 24 os valores de x e y dados pelas equações
da rotação de eixos 21, obtemos
9(x0 cos θ − y0 sin θ)2 − 24(x0 cos θ − y0 sin θ)(x0 sin θ + y0 cos θ)+
+16(x0 sin θ + y0 cos θ)2 − 40(x0 cos θ − y0 sin θ)− 30(x0 sin θ + y0 cos θ) = 0
que, após desenvolvimento e redução de termos semelhantes, assume a forma
(9 cos2 θ − 24 cos θ sin θ + 16 sin2 θ)x02+
+(14 sin θ cos θ + 24 sin2 θ − 24 cos2 θ)x0y0+
+(9 sin2 θ + 24 sin θ cos θ + 16 cos2 θ)y02−
−(40 cos θ + 30 sin θ)x0 + (40 sin θ − 30 cos θ)y0 = 0.
(25)
49

Visto que a equação transformada deve ser desprovida de termos em x0y0,
x0 = 0 e y = 00 em 25 obteremos
14 sin θ cos θ + 24 sin2 θ − 24 cos2 θ = 0.ou
7(2 sin θ cos θ) + 24(sin2 θ − cos2 θ) = 0.
Como sin 2θ = 2 sin θ cos θ e cos 2θ = cos2 θ − sin2 θ, podedmos escrever
7 sin 2θ − 24 cos 2θ = 0donde vem
sen2θcos 2θ
= 247
Substituindo na formula sen22θ + cos2 2θ = 1 obtem-se cos 2θ = 725
Como o ângulo θ estará restrito ao primeiro quadrante, 2θ se situará no
primeiro ou no segundo quadrantes onde o cosseno e a tangente de um ângulo concordam
em sinal.
A fim de efetuar a simplificação da equação 25 encontraremos os valores de
sin θ e cos θ, por meio das fórmulas do ângulo metade da Trigonometria. Assim,
sin θ =q
1−cos 2θ2
=
q1− 7
25
2= 3
5e cos θ =
q1+cos 2θ
2=
q1+ 7
25
2= 4
5.
que substituidos na equação 25
50

µ144
25− 28825
+144
25
¶x02 +
µ168
25+216
25− 38425
¶x0y0
+
µ81
25+288
25+256
25
¶y02 − (32 + 18)x0 + (24− 24)y0 = 0
-
6
X
Y
O©©©©©©©©©
A
A
A
A
A
A
*X’
KY’
¥¦θFigura 8b
que se reduz à equação transformada procurada
y02 − 2x0 = 0. (26)
O lugar geométrico, uma parábola, está mostrado na Fig. 8b.
3.0.2 Exercícios
1. Determinar as novas coordenadas do ponto (3,−4) quando os eixos coordenadossão girados de um ângulo de 30◦.
2. Determinar as novas coordenadas dos pontos (1, 0) e (0, 1) quando os eixos coor-
denados são girados de um ângulo de 90◦.
3. Em cada um dos exercícios seguintes transformar a equação dada por rotação dos
eixos coordenados do ângulo indicado.
51

(a) 2x+5y−3 = 0; arctan 2.5.
(b) x2−2xy+y2−x = 0; 45◦.
(c)√3y2 + 3xy − 1 = 0; 60◦.
(d) 5x2 + 3xy + y2 − 4 = 0; arcsin√1010.
(e) 11x2 + 24xy + 4y2 − 20 = 0; arctan 0.75.
(f) x4 + y4 + 6x2y2 − 32 = 0; 45◦.4. Por meio da rotação dos eixos coordenados transformar a equação 2x− y− 2 = 0em outra equação desprovida do termo em x0.
5. Por rotação dos eixos coordenados transformar a equação x+2y−2 = 0 em outraequação desprovida do termo y0.
6. Em cada um dos exercícios seguintes, por uma rotação dos eixos coordenados,
transformar a equação dada em outra equação desprovida do termo em x0y0.
(a) 4x2 + 4xy + y2 +√5x = 1.
(b) 9x2 + 3xy + 9y2 = 5.
(c) 5x2 + 4xy + 2y2 = 2.
(d) 2x2 − 5xy + 2y2 = 0.(e) x2 − 2xy + y2 − 4 = 0.(f) 16x2+24xy+9y2+25x = 0.
7. A equação de uma circunferência é x2 + y2 = r2. Mostrar que a forma desta
equação permanece sem modificação quando referida aos eixos coordenados que
foram girados de qualquer ângulo θ. Diz-se então que esta equação é invariante
quanto à rotação.
52

3.0.3 Respostas
1)¡32
√3− 2,−3
2− 2√3¢ 2)(0,−1)e(1, 0)
3)a)√29x0 − 3 = 0. 3b)4y02 −√2x0 +√2y0 = 0.
3c)3√3x02 −√3y02 − 2 = 0. 3d)11x02 + y02 − 8 = 0.
3e)4x02 − y02 − 4 = 0. 3f)x04 + y04 = 16.
4)√5y0 + 2 = 0. 5)
√5x0 − 2 = 0.
6a)5x02 + 2x0 − y0 − 1 = 0. 6b)21x02 + 15y02 − 10 = 0.6c)6x02 + y02 − 2 = 0. 6d)x0 − 3y0 = 0 e x0 + 3y0 = 0.
6e)y0 =√2 e y0 = −√2. 6f)5x02 + 4x0 − 3y0 = 0.
7)5x2 − 26xy + 5y2 + 72 = 0
3.1 Simplificação de equações por meio de transformação de coordenadas.
Já vimos que por meio de uma translação ou de uma rotação dos eixos
coordenados, ou ainda combinando as duas é possível transformar quaisquer equações
numa das formas padrões com centro na origem do sistema adotado.
Esse processo é denominado simplificação de equações por transformação de
coordenadas.
Consideraremos primeiramente o caso em que uma translação dos eixos co-
ordenados a uma nova origem O0(h, k) é seguida por uma rotação dos eixos transladados
em torno de O0 de um ângulo θ, como se representa na Fig. 8c.
-X
6Y
X’
Y’
X’X’
Y’Y’
-
6
O
©©©©©©X”*
AAAAAAY”K
O0
(h, k)
θ
sP (x, y) = P (x0, y0) = P (x”, y”)
Figura 8c
53

Seja P um ponto no plano ordenado, sejam (x, y), (x0, y0) e (x00, y00) suas
coordenadas quando referido, respectivamente, aos eixos originais X e Y , aos eixos
transladados X 0 e Y 0 e aos eixos girados X 00 e Y 00. Pela equação 10 podemos escrever:
x = x0 + h
y = y0 + k(27)
e, 21,
x0 = x00 cos θ − y00 sin θ
y0 = x00 sin θ + y00 cos θ.(28)
Substituindo os valores de x0 e y0 dados na equação 28 na equação 27, obtemos
as equações da transformação
x = x00 cos θ − y00 sin θ + h
y = x00 sin θ + y00 cos θ + k.(29)
Pode-se mostrar que as equações de transformação 29 permanecem válidas
quando a ordem de transformação é invertida, ou seja, quando uma rotação é seguida
por uma translação. Desse modo, se os eixos coordenados são submetidos tanto a uma
translação como a uma rotação, tomadas em qualquer ordem, e se as coordenadas de
qualquer ponto P referido aos conjuntos de eixos original e final são (x, y) e (x00, y00),
respectivamente, então as equações de transformação das antigas para as novas coorde-
nadas finais são dadas por
x = x00 cos θ − y00 sin θ + h
y = x00 sin θ + y00 cos θ + k(30)
54

onde θ é o ângulo de rotação e (h, k) são as coordenadas da nova origem referida aos
eixos coordenados originais.
Cabe resaltar que, embora as equações de transformação da equação 30 pos-
sam ser empregadas quando são realizadas tanto uma translação como uma rotação,
geralmente é mais simples realizar estas operações separadamente em duas etapas dis-
tintas. Embora a ordem das transfomações de coordenadas seja indiferente, no caso
de uma equação do segundo grau em que os termos x2, y2 e xy formam um quadrado
perfeito deve-se inicialmente girar os eixos e após fazer a translação.
Exemplo 26 Por meio de transformação de coordenadas simplificar a equação
3x2 − 2xy + 3y2 − 2x− 10y + 9 = 0e esboçar seu gráfico.
Solução: sendo que na equação 3x2−2xy+3y2−2x−10y+9 = 0 os termosde segundo grau não formam um quadrado perfeito, podemos primeiramente transladar
os eixos para uma nova origem (h, k). Logo, usando as equações de transformação 10
podemos escrever
3(x0 + h)2 − 2(x0 + h)(y0 + k) + 3(y0 + k)2 − 2(x0 + h)− 10(y0 + k) + 9 = 0
que, após o desenvolvimento, simplificação e redução de termos semelhantes,
resulta na equação
3x02 − 2x0y0 + 3y02 + (6h− 2k − 2)x0 + (−2h+ 6k − 10)y0++(3h2 − 2hk + 3k2 − 2h− 10k + 9) = 0.
(31)
A fim de eliminar os termos dos coeficientes x0 e y0, que são os termos de
primeiro grau, igualamos seus coeficientes a zero e obtem-se o sistema 6h− 2k − 2 = 0−2h+ 6k − 10 = 0
cuja solução é h = 1 e k = 2. Substituindo estes valores de h e k na equação
31 obtemos
55

3x02 − 2x0y0 + 3y02 − 2 = 0. (32)
Como ainda existe o termo x0y0, vamos eliminá-lo por meio da rotação de
eixos. Substituindo x0 e y0 pelos valores dados nas equações 28 obtém-se
3(x00 cos θ − y00 sin θ)2 − 2(x00 cos θ − y00 sin θ)(x00 sin θ + y00 cos θ)+
+3(x00 sin θ + y00 cos θ)2 − 2 = 0
que se reduz a
(3 cos2 θ − 2 sin θ cos θ + 3 sin2 θ)x002 + (2 sin2 θ − 2 cos2 θ)x00y00++(3 sin2 θ + 2 sin θ cos θ + 3cos2 θ)y002 − 2 = 0.
(33)
A fim de eliminar o termo x00y00 de 33 fazemos seu coeficiente igual a zero, ou
seja
2 sin2 θ − 2 cos2 θ = 0
dode vem
2 sin2 θ = 2 cos2 θ
ou
sin θ = cos θ
comcluímos então que θ = π4.
Substituindo θ por π4na equação 33 obtem-se a equação x002 + 2y002 − 1 = 0,
na forma padrão é dada por
x002 +y002
1
2
= 1
cujo gráfico é a elipse representada na figura 9.
56

-X
6Y
X’
Y’
-
6
O 1
2¡
¡
¡
¡
¡
¡X”µ
@
@@
@@Y”I
O0
45◦
Figura 9
Exercícios
1. Em cada um dos exercícios abaixo, simplificar a equação dada por transformação
de coordenadas.
(a) x2 − 10xy + y2 − 10x+ 2y + 13 = 0.(b) 52x2 − 72xy + 73y2 − 104x+ 72y − 48.(c) 16x2 + 24xy + 9y2 + 60x− 80y + 100 = 0(d) 3x+ 2y − 5 = 0.(e) 2x2 + 2xy + 2y2 − 2x− 10y + 11 = 0.
2. Determinar as novas coordenadas do ponto (−1, 3) quando os eixos coordenadossão, primeiramente, transladados à nova origem (4, 5) e, então, girados de um
ângulo de 60◦.
3. Determinar as novas coordenadas do ponto (2, 2) quando os eixos coordenados são,
primeiramente, girados de um ângulo de 45◦ e, então, transladados à nova origem
(−1, 1).
4. Por translação dos eixos coordenados à nova origem (3, 3), seguida pela rotação dos
eixos de um ângulo de 30◦, as coordenadas de um certo ponto P são transformadas
em (7, 6). Determinar as coordenadas de P em relação aos eixos originais.
5. Por translação dos eixos coordenados à nova origem (1, 1), seguida pela rotação dos
eixos de um ângulo de 45◦, a equação de um certo lugar geométrico é transformada
em x002−2y002 = 2. Determinar a equação do lugar geométrico em relação aos eixosoriginais.
57

3.1.1 Respostas
1. (a) 2x002 − 3y002 − 6 = 0.(b) x002 + 4y002 − 4 = 0.(c) x002 − 4y00 = 0.(d) 3x002 + y002 − 3 = 0.
2.¡−52−√3, 5
2
√3− 1¢.
3. (2√2,−√2).
4.¡72
√3, 13
2+ 3√3¢.
5. x2 − 6xy + y2 + 4x+ 4y = 0.
58

4 Cônicas
4.1 OBJETIVOS DO CAPÍTULO
Ao final deste capítulo o estudante deverá ser capaz de:
1 - Reconhecer equações das cônicas e seus pontos notáveis;
2 - Determinar as equações das cônicas a partir de pontos notáveis;
3 - Resolver problemas envolvendo cônicas;
4 -Representar graficamente as cônicas.
Exercícios para entregar no dia da prova valendo até dois pontos
para quem não tirar dez na prova e acertar pelo menos duas questões na
prova e um ponto para que acertar apenas uma questão.
1. Transformar as seguintes equações para coordenadas polares
a) x2 + y2 = 4 b) x = 4
c) y = 2 d) y + x = 0
e) x2 + y2 − 2x = 0 f) x2 + y2 − 6y = 0g) x2 + y2 − 2x− 2y − 2 = 0 h) x2 + y2 − 4x+ 4y + 8 = 0
2. Transformar as seguintes equações para coordenadas cartesianas.
a) r = cos θ b) r = 2 sin θ
c) r = 1cos θ+sin θ
d) r = a, a > 0.
e) r = 4√cos 2θ f) r = 2 (1 + cos θ)
3. Esboçar o gráfico das curvas em coordenadas polares (é aconselhavel usar o Excel)
.a) r = 1 + 2 cos θ b) r = 1− 2 sin θc) r = 2 + 3 cos θ d) r = 3− 2 sin θe) r = 2 cos 3θ f) r = 2 sin 2θ
g) r = 2− cos θ h) r = 2− sin θi) r2 = 4sen2θ j) θ = π/4
l) r = 3θ, θ ≥ 0
4. Simplificar a equação y2 − 6x2 − 24x− 2y − 32 = 0 por uma translação dos eixoscoordenados.
59

5. Determine a equação da circunferência cujo centro é o ponto (−4,−1) e que étangente à reta 3x+ 2y − 12 = 0.
6. Determinar a equação da circunferência cujo centro está sobre a reta 4x+7y+5 = 0
e que passa pelos dois pontos (−1,−4) e (2,−1).
7. Escreva as equações reduzidas das parábolas com vértice na origem, dados
(a) o foco (8, 0);
(b) dois pontos da parábola (6, 18) e (−6, 18);(c) um ponto da diretriz (4, 7) e o eixo de simetria Ox.
8. Ache o vértice, o foco, uma equação do eixo e uma equação da diretriz da parábola
dada. Faça um esboço do gráfico.
(a) y2 + 6x+ 10y + 19 = 0
(b) y = 3x2 − 3x− 3(c) 2y2 = 4y − 3x
9. Escreva a equação reduzida da elipse, dados
(a) os focos (±5, 0) e dois vértices (±13, 0);(b) dois vértices (±5, 0) e a excentricidade e = 3
5. Os focos estão no eixo Ox;
(c) o centro (0, 0), um dos focos (0,−√40) e um ponto (√5, 14
3).
10. Ache o centro, os vértices, focos e excentricidade da elipse dada. Faça um esboço
da curva mostrando os focos.
(a) 3x2 + 5y2 − 6x− 12 = 0(b) 3x2 + 2y2 + 12x− 4y + 2 = 0
11. Ache o centro, os vértices, os focos e as equações das assíntotas da hipérbole dada.
Faça um esboço da curva e de suas assíntotas e mostre os focos.
(a) 9x2 − 4y2 = 36(b) x2 − y2 + 8x− 2y − 21 = 0(c) y2 − x2 + 2y − 2x− 1 = 0
12. Escreva a equação reduzida da hipérbole, dados
(a) os vértices (±2, 0) e os focos (±3, 0);(b) b = 4, as assíntotas 2y = ±3x (focos no eixo Oy);(c) as assíntotas y = ±x e um ponto da hipérbole (5, 9).
60

13. Estabelecer a equação da parábola sabemdo que a V (2, 3) e d = −3. Esboçar ográfico.
14. Determiar a equação da elipse tal que C(1, 4), um foco é F (7, 4) e a excentricidade
é e = 35.
15. Dada a hipérbole 9x2 − 4y2 − 54x+ 8y + 113 = 0 determine o centro, os vértices,os focos a excentricidade e esboce o gráfico.
16. Estabelecer a equação da hipérbole sabendo que tem vértices (3,−2) e (5,−2), eum foco (7,−2). Esboçar o gráfico.
61

..
5 Vetores
5.1 OBJETIVOS DO CAPÍTULO
Ao final deste capítulo o estudante deverá ser capaz de:
1 - Reconhecer segmentos orientados e equipolentes;
2 - Definir vetor;
3 - Realizar operações com vetores representados por segmentos equipolentes;
4 - Representar combinações lineares de vetores;
5 - Representar graficamente e analiticamente vetores e combinações lineares
no plano e no espaço tridimensional;
6 - Representar graficamente vetores definidos por dois pontos no plano e no
espaço tridimensional;
7 - Realizar operações com vetoresa representados analiticamente;
8 - Resolver problemas envolvendo as condições de paralelismo de vetores;
9 - Resolver problemas envolvendo o produto escalar e suas propriedades;
10 - Resolver problemas envolvendo o produto vetorial e suas propriedades;
11 - Resolver problemas envolvendo o produto misto e suas propriedades;
12 - Resolver problemas envolvendo o duplo produto vetorial e suas pro-
priedades;
Exercícios para entregar no dia da prova valendo até dois pontos
para quem não tirar dez na prova e acertar pelo menos três questões na
prova, um ponto para quem acertar duas questão e meio ponto para quem
acertar apenas uma questão.
1. Dados os vetores u e v da figura, mostrar num gráfico, um representante do vetor:
a) u− v
b) v − 2uc) u− 3v
-©©©*v
u
62

2. Na figura abaixo, representa-se um cubo. Desenhe a flecha de origem H que
representa
a) (E − F ) + (B −D) + (C −D);
b) −(G−B) + (B −A).
¡¡
¡¡
¡¡
¡¡
A B
CD
E
HF
G
3. Sabendo que o ângulo entre os vetores u e v é de 60◦, determinar o ângulo formado
pelos vetores −u e 2v.
4. Dados os vetores u = (4, 1) e v = (2, 6), calcular u+ v e 2u. Fazer a representação
geométrica desses vetores.
5. Demonstre a propriedade u+ v = v + u (comutativa).
6. Dados os vetores u = (3,−1) e v = (−1, 2), determinar o vetor w tal que 4(u −v) + w = u− 2w.
7. Dados os pontos A(2,−1), B(−1, 3) e C(4,−2), determinar D(x, y) de modo queCD = 3AB.
8. Dados os vetores u = (−2, 3,−4) e v = (−4, 3,−8), verificar se são paralelos.
9. Determinar a e b de modo que sejam colineares os pontos A(3, a, b), B(1, 5, 1) e
C(−3, 13, 7).
10. Dar as expressões das coordenadas do ponto médio do segmento da reta de ex-
tremidades A(x1, y1) e B(x2, y2).
11. Na figura abaixo tem-se CM = CA3, CN = CB
3. Prove que os segmentosMN e AB
são paralelos, e que o comprimento do primeiro é 13do comprimento do segundo.
¢¢¢¢¢¢¢¢¢
AAAAAAAAA
A B
M N
C
63

12. Dados os vetores a = 2i− 3j + 5k e b = i− 2j. Determine a · b.
13. Dados os vetores u = (4, α,−1) e v = (α, 2, 3) e os pontos A(4,−1, 2) e B(3, 2,−1),determinar o valor de α tal que AB · (u+ v) = 5.
14. Determine o módulo do vetor v do exercício 13.
15. Determine o versor do vetor v do exercício 13.
16. Sabendo que a distância entre os pontos A(−1, 2, 3) e B(1,−1,m) é 7, calcular m.
17. Determinar α para que o vetor u = (√114,−1
2, α) seja unitário.
18. Provar que |u− v|2 = |u|2 − 2u · v + |v|2.
19. Determinar os ângulos do triângulo de vértices A(2, 1, 3), B(1, 0,−1) e C(−1, 2, 1).
20. Provar que os pontos A(5, 1, 5), B(4, 3, 2) e C(−3,−2, 1) são vértices de um triân-gulo retângulo.
21. Os ângulos diretores de um vetor podem ser de 45◦, 60◦ e 90◦ ?
22. Qual o comprimento do vetor projeção de u = (3, 5, 2) sobre o eixo dos y ?
23. Calcule m para que projvu =12v, sendo u = (m, 2, 0) e v = (2,m, 0) na base
ortonormal.
24. Se u = 2i+ 3j + 4k e v = −i+ k, determine u× v e v × u.
25. Calcular a área do triângulo de vértices A(2, 3,−1), B(3, 1,−2) e C(−1, 0, 2).
26. Calcular a área do paralelogramo que tem um vértice no ponto A(3, 2, 1) e uma
diagonal de extremidades B(1, 1,−1) e C(0, 1, 2).
27. Mostre que se 3u− 2v + 17w = 0 então 3u× v = 17v × w.
28. Dados os vetores u = (2,−1, 1), v = (1,−1, 0) e w = (−1, 2, 2), calcular u×(v×w)
e w × (u× v).
29. Verificar se são coplanares os pontosA(2, 1, 3), B(3, 2, 4), C(−1,−1,−1) eD(0, 1,−1).
64

30. Determinar o valor de k para que os seguintes vetores sejam coplanares: a =
(2, k, 1),
b = (1, 2, k) e c = (3, 0,−3).
31. Os vetores a = (3,−1,−3), b = (−1, 1,−4) e c = (m+ 1,m,−1) determinam um
paralelepípedo de volume 42. Calcular m.
32. Determinar u · v + u · w + v · w, sabendo que u + v + w = 0, |u| = 2, |v| = 3 e|w| = √5.
33. O vetor v é ortogonal aos vetores a = (1, 2, 0) e b = (1, 4, 3) e forma ângulo agudo
com o eixo dos x. Determinar v, sabendo que |v| = 14.
34. Sendo u e v vetores do espaço, com v 6= 0:a) determinar o número real r tal que u− rv seja ortogonal a v e
b) mostrar que (u+ v)× (u− v) = 2v × u.
65

6 Retas
6.1 OBJETIVOS DO CAPÍTULO
Ao final deste capítulo o estudante deverá ser capaz de:
Retas
1. Reconhecer equações da reta: geral, paramétrica, simétricas, e reduzidas;
2. Determinar equações da reta que passam: por um ponto, por dois pontos e por
três pontos alinhados;
3. Reconhecer equações de retas paralelas aos eixos coordenados;
4. Calcular o ângulo entre duas retas;
5. Resolver problemas que envolvam paralelismo e ortogonalidade e coplanaridade de
retas;
6. Identificar as posições relaticas entre duas retas;
7. Resolver problemas que envolvam interseção de retas;
8. Reconhecer equações de retas paralelas aos eixos coordenados;
Exercícios para entregar no dia da prova valendo até dois pontos
para quem não tirar dez na prova e acertar pelo menos três questões na
prova, um ponto para quem acertar duas questão e meio ponto para quem
acertar apenas uma questão.
1. Classifique as equações das retas abaixo e obtenha, diretamente das equações, um
ponto e um vetor diretor.
a)
x = 3 + t
y = −1 + t
z = 4 + t
b) x−31= y−1
−4 =z+51
c)
y = 3x+ 1
z = x− 2d) 1−x
8= 2y+4
3= z−1
2e)
x = 52− 3z
y = 2− z2
66

2. Dados A(2, 2, 5), u = (1,−1, 3), v = (2, 2, 3), escreva equações paramétricas da
reta por A, paralela ao vetor v − u;
3. Dadas as retas r : (x, y, z) = (1, 0, 0) + t(m + 1, 0, 2), s : (x, y, z) = (2, 2, 1) +
t(1,m, n) e
t : x+ 1 = y − 2 = z−32calcule m e n sabendo que t é ortogonal às outras duas.
4. Mostre que a reta t, que passa pelos pontos A(2, 2, 0) e B(1, 0,−2), forma ângulos
congruentes (isto é, de mesma medida) com as retas r :
x = 1 + 2t
y = 2− t
z = 3 + 2t
e s :
x2= y−1
2= 1− z.
5. Sendo A(1, 0, 0) um ponto, encontre um ponto P da reta r de equações paramétri-
cas
x = 1− t
y = t
z = 1
tal que o cosseno do ângulo entre as retas r e o vetor−→AP seja
q23.
6. Estudar a posição relativa das retas. Se as retas forem concorrentes, determine o
ponto de interseção.
a) r :
x = 2− 3ty = 3
z = −52t
s :
x−46= z−1
5
y = 7
b) r :
x = −1 + t
y = −10 + 5tz = 9− 3t
s :
x = −3z = 4
c) r :
x = 1 + t
y = 1− t
z = t
s :n
x− 1 = y − 1 = z
7. Considere o paralelograma formado pelos pomtos A (1,−2, 3) , B (4, 3,−1) ,C (5, 7,−3) e D (2, 2, 1). Encontrar as equações paramétricas da reta paralela aolado AB que passa pela inerseção das diagonais.
67

8. Considere o triângulo de vértices A (2, 3,−1) , B (3, 1,−2) e C (−1, 0, 2) Encontreas equações paramétricas da reta suporte da altura do triângulo em relação ao
lado AB.
9. Considere o triângulo de vértices A (2, 3,−1) , B (3, 1,−2) e C (−1, 0, 2) Encontreas equações paramétricas da reta que passa pelo ponto B e perpendicular à reta
suporte da altura do triângulo em relação ao lado AC.
10. Considere o triângulo de vértices A (2, 3,−1) , B (3, 1,−2) e C (−1, 0, 2) Encontreas equações paramétricas o da reta que passa pelo baricentro desse triângulo e é
paralela ao lado AB.
11. Encontre a equação simétrica da reta suporte da mediatriz do triânguloA (2, 3,−1) ,B (3, 1,−2) e C (−1, 0, 2) em relação ao lado BC.
12. Encontrar as equações reduzidas da reta que passa pelo ponto de interseção das di-
agonais do paralelograma formado pelos pomtosA (1,−2, 3) , B (4, 3,−1) , C (5, 7,−3)e D (2, 2, 1) e é simultaneamente perpendicular ás duas diagonais.
13. Encontre a equação simétrica da reta que passa pelos pontosA (1,−2, 3) eB (2, 2, 1).
14. Encontre as equações reduzidas da reta que passa pelos pontosA (1, 4,−3) , B (2, 1, 3)e C (4,−1, 7).
15. Encontre as equações reduzidas da reta que passa pelos pontosA (1, 4,−3) , B (2, 1, 3)e C (4,−1, 7) e é perpendicular ao eixo x.
16. Encontr a equação da reta simultaneamente ortogonal aos lados AB e AC, do
triângulo de vértices A (2, 3,−1) , B (3, 1,−2) e C (−1, 0, 2) e passa pelo ponto B.
17. Encontre a equação paramétrica da reta que passa pelo ponto A (2, 3,−1) e formaum ângulo de 60o com o vetor
−−−−−−−−−−−−−−−−→A (2, 3,−1)B (3, 1,−2).
18. Sejam A(0, 4, 0), B(3, 0, 0), C e D vértices de um quadrado. Admitindo que o
ângulo C é oposto ao ângulo A, encontre as equações das retas diagonais desse
quadrado e o ponto de interseção dessas retas no primeiro quadrante.
68

19. Determinar as equações paramétricas da reta que passa pelo pontoA(1, 2, 5) e é, si-
multaneamente, ortogonal às retas de equaçõesx
2=
y
−1 =z − 3−2 e
y = 3x− 1z = −x+ 4
.
20. Determine as equações reduzidas da reta que passa pelo ponto A(1, 2, 20) e é
perpendicular à reta que suporta a mediana relativa ao lado BC do triângulo
A (0, 0, 6), B (6, 0, 0) e C (0, 6, 0).
21. Dtermine o valor dem para que os pontos A (3,m, 1), B (1, 1,−1) e C (−2, 10,−4)sejam colineares.
22. Verifique se as retas r e s de equações respectivamente
x− 22
=y − 43
=z − 14
e
x = 5 + t
y = 2− t
z = 7− 2t
são coplanares.
23. Encontre o ponto de interseção das retas de equações
x− 22
=y
3=
z − 54
e
x = 5 + t
y = 2− t
z = 7− 2t
24. Dadas as retas r :
x = 1 + t(α+ 1)
y = 0
z = 2t
s :
y = αx− 2α+ 2z = βx− 2β + 1
e
t : x+12= y− 2 = z−3
−2 determinar α e β sabendo que a reta t é ortogonal às outras
duas.
25. Determinar as equações paramétricas da reta que passa pelo ponto A (2, 0,−1) e
é simultaneamente ortogonal ás retas r :
x− 2 = z−22
x = 2e s :
x = 5t
y = 6.
26. Encontrar as equações das retas supertes das alturas do triângulo de vértices
A (1, 0, 1), B (4, 2, 1) e C (1, 2, 0) e o ponto de interseção dessas retas.
69

7 Planos e distâncias
7.1 OBJETIVOS DO CAPÍTULO
Ao final deste capítulo o estudante deverá ser capaz de:
1. Determinar as equações gera e paramétricas do plano;
2. Determinar equações do plano considerando as condições descritas nas páginas 150
- 151 e 152 do lívro texto;
3. Reconhecer equações de planos paralelas aos eixos (planos) coordenados;
4. Determinar o ângulo entre dois planos e entre reta e plano;
5. Resolver problemas que envolvam paralelismo e perpendicularismo entre planos e
planos e retas e planos;
6. Resolver problemas que envolvam interseção entre planos e entre planos e retas;
7. Resolver problemas que envolvam distâncias entre dois pontos;
8. Resolver problemas que envolvam distâncias entre um ponto e uma reta, distâncias
entre duas retas;
9. Resolver problemas que envolvam distâncias entre um ponto e um plano, distâncias
entre dois planos, uma teta e um plano;
Exercícios para entregar no dia da prova valendo até dois pontos
para quem não tirar dez na prova e acertar, na prova, pelo menos quatro
questões. Um ponto para quem acertar três questões e meio ponto para que
acertar duas quatões.
1. Obtenha uma equação geral e uma paramétrica para cada um dos seguintes planos
descritos abaixo.
a) Plano que contém o ponto A(1, 1, 5) e tem o vetor n = (2, 3,−1) como vetornormal.
70

b) Plano que contém o ponto A(1, 0, 2) e os vetores u = (1, 2, 3) e v = (2,−1, 3).c) Plano que contém os pontos A(−1, 1,−2) e B(1, 4, 1) e é paralelo ao vetor
u = (2, 1, 1).
d) Plano que contém o ponto A(1, 2, 1) e é perpendicular à reta r : (x, y, z) =
(1, 2, 1) + t(2, 1, 0).
e) Plano que contém os pontos A(1, 2, 5) e B(0, 2, 5) e passa pela origem.
2. Determine m para que os planos π1 e π2 sejam perpendiculares.
a) π1 : (1−m)x−my + z = 0 e π2 : (m+ 1)x+my − 3 = 0b) π1 : 2x+my + 2z = 0 e π2 : x+my + 2z + 3 = 0
3. Obtenha equações paramétricas do plano paralelo ao plano Oxy, que passa pelo
ponto P (2, 0, 3).
4. Obtenha uma equação vetorial do plano que passa pelo ponto P (1, 2, 3) e é paralelo
ao plano de equações paramétricas
x = 3t+ 2h
y = t− h
z = −t+ 2h.
5. Determinar o ângulo entre os planos π1 : x − y + 3z − 2 = 0 e π2 :
x+ 2y + z − 3 = 0.
6. Determinar o ângulo que a reta r :
x = 1 + 2t
y = 3 + t
z = 3− t
forma com o plano π : x+2y+
z − 5 = 0.
7. Obtenha equações paramétricas da reta interseção dos planos π1 : x+y+2z−1 =0 e
π2 : x+ y + 3z = 0
8. Dados os planos π1 : x−y+z+1 = 0, π2 : x+y−z−1 = 0 e π3 : x+y+2z−2 = 0,ache uma equação do plano que contém π1 ∩ π2 e é perpendicular a π3.
9. Resolver os problemas 6, 7, 8, 9 e 10 (p. 181)do livro texto;
10. Encontrar a equação do plano que passa pelos pontos A (1, 2, 3) ,
B (3, 2, 1) e C (−1, 2, 3);
71

11. Determinar o valor de α para que os pontos A (1, 2, 3) , B (3, 2, 1) ,
C (α, 5,−1) e D (−1, 2, 3) sejam coplanares.
12. Mostre como se obtem as fórmulas para encontrar as distâncias entre ponto e reta,
ponto e plano, retas e planos e entre dois planos;
13. Calcule a distância entre os pontos P e Q, sendo P (2,−1, 3) e Q(−1, 1, 0).
14. Calcule a distância do ponto P (4,−1, 3) à reta r : x = 2z − 1
y = z + 1.
15. Calcule a distância do ponto P (2, 1,−6) ao plano π : x− 2y − 2z − 6 = 0.
16. Obtenha uma equação vetorial da reta r paralela à s :
2x− z = 3
y = 2, concorrente
com a reta h de equação X = (−1, 1, 1) + t(0,−1, 2), e que dista uma unidade doponto P (1, 2, 1).
17. Determinar a medida da altura relativa ao ladoBC do triânguloA (0, 0, 6), B (6, 0, 0)
e C (0, 6, 0).
18. Resolver os problemas 8, 9, 10 e 11 do livro texto (p. 2002)
7.2 Bibliografia
BARZ, Ligia Liani. Apostila utilizada nos semestres anteriores (base desta).
STEINBRUCH, Alfredo & WINTERLE, Paulo. Geometria analítica.
McGrauw-Hill.
FLEMMING, Diva M & GONÇAVES, Mirian B. Cálculo A. Makron Books.
72