UNIVERSIDADE DO ALGARVE APONTAMENTOS DE FÍSICAw3.ualg.pt/~rguerra/CBM/Ap_CBM.pdf · Revisão de...
153
UNIVERSIDADE DO ALGARVE APONTAMENTOS DE FÍSICA Curso de Ciências Biomédicas 2008/2009 – 4º Módulo Docente: Carla Silva DEPARTAMENTO DE FÍSICA DA FACULDADE DE CIÊNCIAS E TECNOLOGIA
Transcript of UNIVERSIDADE DO ALGARVE APONTAMENTOS DE FÍSICAw3.ualg.pt/~rguerra/CBM/Ap_CBM.pdf · Revisão de...

UNIVERSIDADE DO ALGARVE
APONTAMENTOS DE FÍSICA
Curso de Ciências Biomédicas
2008/2009 – 4º Módulo
Docente: Carla Silva
DEPARTAMENTO DE FÍSICA
DA FACULDADE DE CIÊNCIAS E TECNOLOGIA

2
INTRODUÇÃO 5
I COMPLEMENTOS DE MECÂNICA 6
1. Corpos em equilíbrio 6 1.1 Equilíbrio do corpo humano 8
2. O mecanismo das alavancas 9 2.1 O braço como exemplo de alavanca 11 2.2 As costas como exemplo de alavanca 12
3. Elasticidade e Compressão 14 3.1 Distensão e compressão de corpos por acção de uma força 14 3.2 Elasticidade dos tecidos biológicos 16 3.3 Forças impulsivas e ruptura dos tecidos ósseos 17
II COMPLEMENTOS DE MECÂNICA DE FLUIDOS 20
4. Aplicações da hidroestática ao corpo humano 20 4.1 Medição da pressão arterial 22
5. Tensão superficial e capilaridade 24 5.1 Funcionamento dos pulmões e tensão superficial 27
6. Aplicações da hidrodinâmica ao corpo humano 28 6.1 Movimento de fluidos não viscosos 28 6.2 Movimento de fluidos viscosos 29 6.3 Forças de atrito no interior de fluidos 31 6.4 Aspectos da circulação sanguínea 33
III MOVIMENTO OSCILATÓRIO E PROPAGAÇÃO DE ONDAS 37
7. Movimento harmónico simples 37
8. Propriedades das ondas 38 8.1 Descrição das ondas 39 8.2 Reflexão, refracção e interferência 40 8.3 Alguns aspectos das ondas sonoras 42 8.4 Alguns aspectos sobre o efeito de Doppler 43 8.5 As ondas electromagnéticas e a sua interacção com a matéria 44
IV RADIOACTIVIDADE 48
9. Produção de radioisótopos 49
10. Decaimento radioactivo 51
11. Lei do inverso do quadrado 54
V APLICAÇÕES LASERS À MEDICINA 55
12. Princípios físicos do funcionamento dos lasers 55
13. Interacção da luz LASER com os tecidos 57

3
14. Aplicação dos lasers a diferentes áreas médicas (facultativo) 60
VI ALGUNS ELEMENTOS DE ELECTROMAGNETISMO E APLICAÇÕES AOS SISTEMAS BIOLÓGICOS 62
15. Introdução ao campo magnético 62
16. Revisão de alguns conceitos sobre os principais elementos dos circuitos eléctricos (facultativo) 66
17. Equipamentos, sistemas de medida e de controlo 68
18. O electrocardiógrafo 70
19. O electroencefalógrafo 71 19.1 Registos electroencefalográficos 71 19.2 Equipamento (facultativo) 73 19.3 Logística (facultativo) 76
20. Aspectos da electricidade do sistema nervoso 77 20.1 As células gliais 77 20.2 As células nervosas ou neurónios 79 20.3 O potencial de repouso 79 20.4 O potencial de acção 82 20.5 O papel da mielina na propagação dos potenciais de acção 83 20.6 As sinapses 83 20.7 Organização cerebral e actividade eléctrica 85
21. Aspectos da electricidade dos músculos 86 21.1 Os músculos esqueléticos 86 21.2 Os músculos lisos 89 21.3 O músculo cardíaco 90
VII ELEMENTOS DE TERMODINÂMICA 93
22. Transporte passivo e activo 93 22.1 Difusão livre 93 22.2 Difusão através de membranas 96 22.3 A importância da difusão na oxigenação 98
23. Leis da Termodinâmica 98 23.1 Primeira Lei da Termodinâmica 98 23.2 Segunda Lei da Termodinâmica 99 23.3 Aplicação das duas Leis da Termodinâmica às necessidades energéticas dos seres vivos 100 23.4 Entropia e Segunda Lei 101 23.5 Aspectos da energética do corpo humano 101
VIII OS SENTIDOS DA AUDIÇÃO E DA VISÃO 104
24. Funcionamento do ouvido humano 104 24.1 Gama de frequências e sensibilidade do ouvido humano 106
25. Elementos de óptica geométrica 107 25.1 Índices de refracção, Lei de Snell e ângulo crítico 108 25.2 Lentes 109

4
26. A visão humana 112 26.1 Estrutura e funcionamento do olho 113
BIBLIOGRAFIA 115
ANEXO A – REVISÃO DE ALGUNS CONCEITOS DE CÁLCULO VECTORIAL 117
ANEXO B – REVISÃO DE ALGUNS CONCEITOS DE MECÂNICA 121
Cinemática 121
Dinâmica 125
ANEXO C – CÁLCULO DE UM ÂNGULO DE UM TRIÂNGULO CONHECENDO DOIS LADOS E UM OUTRO ÂNGULO 131
ANEXO D – ALGUNS CONCEITOS ESSENCIAIS SOBRE A ESTRUTURA ATÓMICA DA MATÉRIA 132
Breve contextualização histórica do aparecimento dos modelos atómicos 132
Os modelos atómicos 132
ANEXO E – TÓPICOS SOBRE ALGUNS CONCEITOS DE RELATIVOS A FENÓMENOS ELÉCTRICOS 138
ANEXO F – ALGUNS CONCEITOS ESSENCIAIS RELACIONADOS COM CALOR E TEMPERATURA 145
Escalas de temperatura 145
Expansão térmica de corpos 147
ANEXO G – TÓPICOS SOBRE TEORIA CINÉTICA DOS GASES E TRANSFERÊNCIAS DE CALOR 148
Tópicos de teoria cinética 148
Transferência de calor 150
5
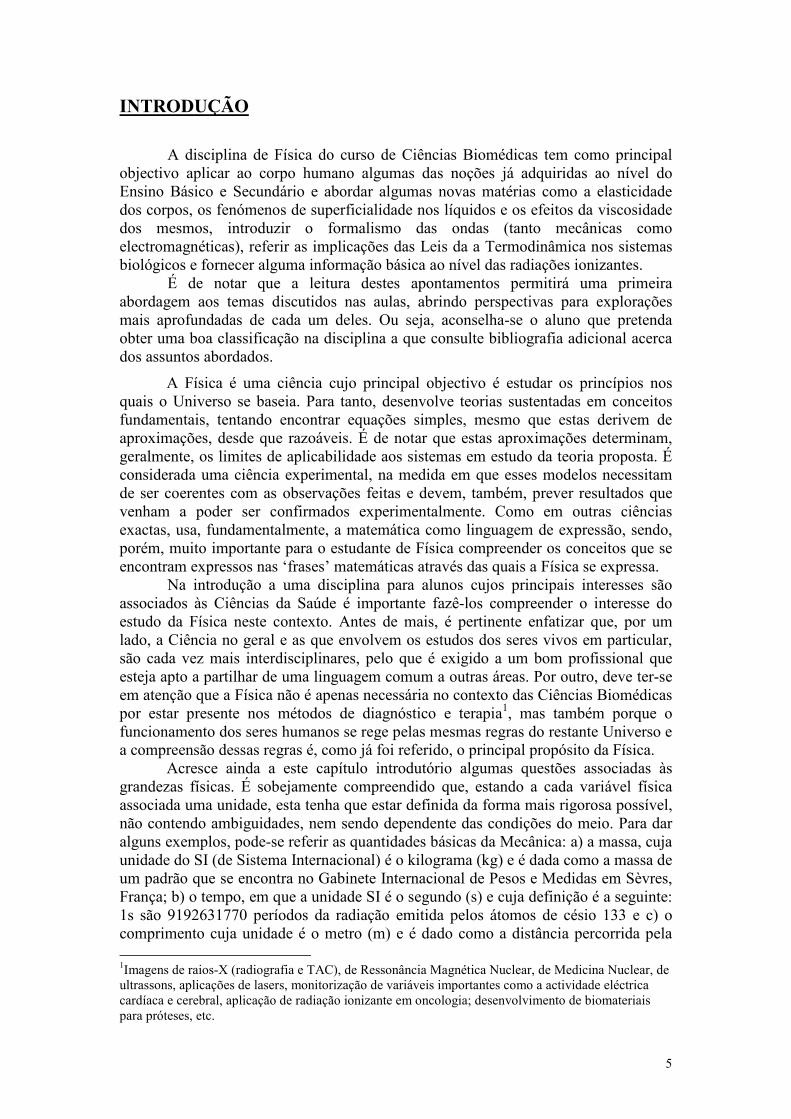
INTRODUÇÃO
A disciplina de Física do curso de Ciências Biomédicas tem como principal objectivo aplicar ao corpo humano algumas das noções já adquiridas ao nível do Ensino Básico e Secundário e abordar algumas novas matérias como a elasticidade dos corpos, os fenómenos de superficialidade nos líquidos e os efeitos da viscosidade dos mesmos, introduzir o formalismo das ondas (tanto mecânicas como electromagnéticas), referir as implicações das Leis da a Termodinâmica nos sistemas biológicos e fornecer alguma informação básica ao nível das radiações ionizantes.
É de notar que a leitura destes apontamentos permitirá uma primeira abordagem aos temas discutidos nas aulas, abrindo perspectivas para explorações mais aprofundadas de cada um deles. Ou seja, aconselha-se o aluno que pretenda obter uma boa classificação na disciplina a que consulte bibliografia adicional acerca dos assuntos abordados.
A Física é uma ciência cujo principal objectivo é estudar os princípios nos quais o Universo se baseia. Para tanto, desenvolve teorias sustentadas em conceitos fundamentais, tentando encontrar equações simples, mesmo que estas derivem de aproximações, desde que razoáveis. É de notar que estas aproximações determinam, geralmente, os limites de aplicabilidade aos sistemas em estudo da teoria proposta. É considerada uma ciência experimental, na medida em que esses modelos necessitam de ser coerentes com as observações feitas e devem, também, prever resultados que venham a poder ser confirmados experimentalmente. Como em outras ciências exactas, usa, fundamentalmente, a matemática como linguagem de expressão, sendo, porém, muito importante para o estudante de Física compreender os conceitos que se encontram expressos nas ‘frases’ matemáticas através das quais a Física se expressa.
Na introdução a uma disciplina para alunos cujos principais interesses são associados às Ciências da Saúde é importante fazê-los compreender o interesse do estudo da Física neste contexto. Antes de mais, é pertinente enfatizar que, por um lado, a Ciência no geral e as que envolvem os estudos dos seres vivos em particular, são cada vez mais interdisciplinares, pelo que é exigido a um bom profissional que esteja apto a partilhar de uma linguagem comum a outras áreas. Por outro, deve ter-se em atenção que a Física não é apenas necessária no contexto das Ciências Biomédicas por estar presente nos métodos de diagnóstico e terapia1, mas também porque o funcionamento dos seres humanos se rege pelas mesmas regras do restante Universo e a compreensão dessas regras é, como já foi referido, o principal propósito da Física.
Acresce ainda a este capítulo introdutório algumas questões associadas às grandezas físicas. É sobejamente compreendido que, estando a cada variável física associada uma unidade, esta tenha que estar definida da forma mais rigorosa possível, não contendo ambiguidades, nem sendo dependente das condições do meio. Para dar alguns exemplos, pode-se referir as quantidades básicas da Mecânica: a) a massa, cuja unidade do SI (de Sistema Internacional) é o kilograma (kg) e é dada como a massa de um padrão que se encontra no Gabinete Internacional de Pesos e Medidas em Sèvres, França; b) o tempo, em que a unidade SI é o segundo (s) e cuja definição é a seguinte: 1s são 9192631770 períodos da radiação emitida pelos átomos de césio 133 e c) o comprimento cuja unidade é o metro (m) e é dado como a distância percorrida pela 1Imagens de raios-X (radiografia e TAC), de Ressonância Magnética Nuclear, de Medicina Nuclear, de ultrassons, aplicações de lasers, monitorização de variáveis importantes como a actividade eléctrica cardíaca e cerebral, aplicação de radiação ionizante em oncologia; desenvolvimento de biomateriais para próteses, etc.

6
luz em 1/299792458 s. Existem ainda outras unidades básicas (à custa das quais é possível representar todas as restantes) como o kelvin (K - unidade de temperatura absoluta); o ampere (A – unidade de corrente eléctrica); a candela, unidade de intensidade luminosa e a mol, quantidade de substância.
Relativamente às unidades das grandezas físicas aconselha-se ainda os alunos a serem coerentes com o sistema de unidades usado (em muitos casos o mais sensato é reduzir todas as unidades ao SI para que não haja erros); a fazerem uma análise dimensional das expressões que usarem, quando têm dúvidas da sua correcção; terem noção da ordem de grandeza da variável que pretendem medir ou calcular e considerar os algarismos significativos, tema que será desenvolvido com maior detalhe no decorrer das aulas laboratoriais. I COMPLEMENTOS DE MECÂNICA
O domínio da Mecânica foi o primeiro da Física a ser aplicado, com êxito, à compreensão do funcionamento dos sistemas vivos, revelando-se particularmente eficaz na descrição dos mecanismos do movimento. O desenvolvimento desta área tem tido particular interesse na recuperação de doentes com dificuldades motoras, no desempenho dos atletas e na construção de próteses e dispositivos de apoio à locomoção humana.
Neste primeiro capítulo assume-se que o aluno esteja familiarizado com o cálculo vectorial2 conheça as equações do movimento de corpos, tenha presente conceitos como os de: vector posição no espaço, velocidade instantânea e velocidade média, aceleração de um corpo, massa, força, centro de massa, momento linear, energia cinética, energia potencial e trabalho realizado por uma força. Espera-se ainda que o aluno domine as três leis de Newton, reconheça o atrito como um fenómeno de resistência ao movimento dos corpos, compreenda e aplique nas situações adequadas o Princípio de Conservação da Energia Mecânica e conheça as unidades de todas as grandezas relacionadas com a Mecânica3.
1. Corpos em equilíbrio Como já foi discutido em outros níveis de Ensino4, o estado de movimento de
um corpo depende das forças que actuam sobre ele. É do conhecimento geral que, se a um corpo não está aplicada nenhuma força, este se mantém em repouso ou com um movimento rectilíneo e velocidade constante (1ª Lei de Newton). No entanto, no nosso quotidiano, é impossível afirmar que um corpo não está sujeito a forças, uma vez que, basta que possua massa para que seja actuado pela força gravítica5. Nesta perspectiva, uma das condições para que um corpo esteja em equilíbrio é que a soma
de todas as forças, iFr
, aplicadas sobre ele, seja nula (equação 1). Realce-se que o
somatório considerado representa uma soma de vectores, uma vez que a força é uma grandeza vectorial, ou seja, é caracterizada não apenas por um valor e uma unidade, mas também por uma direcção, um sentido e um ponto de aplicação.
2 Ver ANEXO A. 3 Ver ANEXO B. 4 Para uma breve revisão, ver ANEXO B. 5 Embora em rigor a força gravítica e o peso de um objecto não sejam exactamente a mesma força (na verdade o peso é a resultante da soma da força gravítica com uma força de inércia que corresponde ao facto de todos os corpos à superfície da Terra não se encontrarem num referencial de inércia), neste texto os dois conceitos irão ser utilizados com o mesmo significado, desprezando-se, deste modo, a força de inércia aplicada nos corpos devido à rotação da Terra.

7
0rr=∑
i
iF .
equação 1
Se a condição descrita pela equação 1 é necessária para que um corpo esteja em equilíbrio, não é menos verdade que não é suficiente. De facto, o ponto de aplicação das forças é um aspecto importante a ter em conta quando se estuda o equilíbrio dos corpos. Se atendermos a que o peso de um corpo tem o seu ponto de aplicação no seu centro de massa, sabemos da nossa experiência diária que este tem que se encontrar alinhado com a base de sustentação do corpo, para que o corpo se mantenha em equilíbrio. Enquanto que os corpos na situação das Figura 1 a) e Figura 1 b) se encontram estáveis (o seu centro de massa encontra-se sobre a base de sustentação), um corpo na situação da Figura 1 c) encontra-se instável (uma vez que desenhando uma linha vertical que passe pelo seu centro de massa, esta se encontra fora da base de sustentação).
Figura 1 - Os objectos a) e b) encontram-se em equilíbrio, embora o objecto b) abandone o estado de repouso mais facilmente, uma vez que a sua base de sustentação é menor do que a do objecto a). O objecto c) encontra-se em desequilíbrio, visto que a vertical que passa pelo seu centro de massa cruza o solo num ponto fora da sua base de sustentação. (Adap. de P. Davidovits, 2001).
A grandeza que permite quantificar a estabilidade de um corpo no que respeita
ao ponto de aplicação das forças a que este está sujeito, ou, dito de uma outra forma, fornece a maior ou menor tendência para que essas forças lhe confiram um movimento de rotação, é o momento da força. O momento da força é também uma grandeza vectorial e o seu módulo é dado pela equação 2:
αsen..dFL = ,
equação 2
onde: F é o valor da força, d é a distância do ponto de aplicação da força ao ponto de rotação e α é o ângulo formado pela força e pelo vector que liga o ponto de aplicação da mesma ao ponto de rotação. Nos diagramas da Figura 2 é possível compreender de que forma é que os momentos das forças que estão aplicadas ao corpo (o seu peso, representado pela letra P e a reacção do plano sobre o corpo, representado pela letra R), tendem a impor-lhe um movimento de rotação. Deste modo, para que um corpo se mantenha em equilíbrio, deve acrescentar-se à equação 1, a condição de, também a soma dos momentos das forças aplicadas ao corpo ser nula (equação 3):
0rr=∑
i
iL .
equação 3
8
Figura 2 - Representação do peso e da reacção do plano sobre o corpo em duas situações
distintas: o corpo a) tende a rodar no sentido contrário ao dos ponteiros do relógio, enquanto que o corpo b) tende a rodar no sentido dos ponteiros do relógio. (Nota: Repare-se que a reacção do plano sobre o corpo não está, nestes casos, representado no seu correcto ponto de aplicação que
seria, obviamente, aquele que corresponde à ponta da seta.) (Adap. de P. Davidovits, 2001).
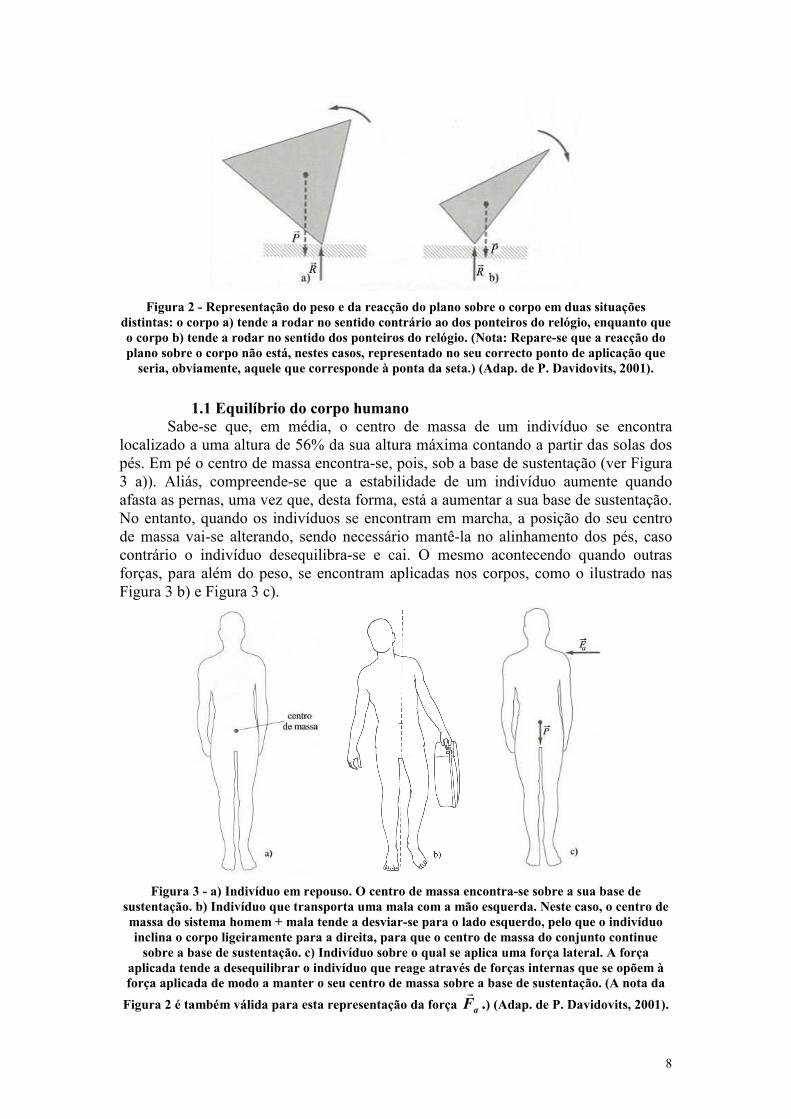
1.1 Equilíbrio do corpo humano
Sabe-se que, em média, o centro de massa de um indivíduo se encontra localizado a uma altura de 56% da sua altura máxima contando a partir das solas dos pés. Em pé o centro de massa encontra-se, pois, sob a base de sustentação (ver Figura 3 a)). Aliás, compreende-se que a estabilidade de um indivíduo aumente quando afasta as pernas, uma vez que, desta forma, está a aumentar a sua base de sustentação. No entanto, quando os indivíduos se encontram em marcha, a posição do seu centro de massa vai-se alterando, sendo necessário mantê-la no alinhamento dos pés, caso contrário o indivíduo desequilibra-se e cai. O mesmo acontecendo quando outras forças, para além do peso, se encontram aplicadas nos corpos, como o ilustrado nas Figura 3 b) e Figura 3 c).
Figura 3 - a) Indivíduo em repouso. O centro de massa encontra-se sobre a sua base de
sustentação. b) Indivíduo que transporta uma mala com a mão esquerda. Neste caso, o centro de massa do sistema homem + mala tende a desviar-se para o lado esquerdo, pelo que o indivíduo inclina o corpo ligeiramente para a direita, para que o centro de massa do conjunto continue sobre a base de sustentação. c) Indivíduo sobre o qual se aplica uma força lateral. A força
aplicada tende a desequilibrar o indivíduo que reage através de forças internas que se opõem à força aplicada de modo a manter o seu centro de massa sobre a base de sustentação. (A nota da
Figura 2 é também válida para esta representação da força aFr
.) (Adap. de P. Davidovits, 2001).

9
Em situações em que outras forças se encontram aplicadas ao corpo, os indivíduos tendem a mover-se de forma a reposicionarem o seu centro de massa, como o ilustrado nas alíneas b) e c) da Figura 3, evitando a queda.
2. O mecanismo das alavancas Uma alavanca é uma máquina simples formada por uma barra rígida que pode
rodar em torno de um ponto fixo, ao qual se chama fulcro. Estas máquinas podem ser utilizadas tanto para içar volumes de um modo bastante eficiente, como para transferir um determinado movimento de um ponto para o outro. Se nos concentrarmos na tarefa de içar um determinado peso, é possível dividir as alavancas em três tipos: classe 1 (aquela em que o fulcro se encontra entre o peso a levantar e a força exercida para o fazer – Figura 4 a)), classe 2 (aquela em que o peso se encontra entre o fulcro e a força – Figura 4 b)) e a classe 3 (aquela em que a força se encontra entre o fulcro e o peso – Figura 4 c)).
Figura 4 - Representação das três classes de alavancas, classificadas segundo a localização
relativa dos pontos de aplicação das forças envolvidas. (Mais uma vez é válida a nota da Figura 2 para a força representada nestas figuras.) (Adap. de P. Davidovits, 2001).
Considerando-se que Pr
representa o peso que se pretende içar com o recurso a uma alavanca, que d1 é a distância entre o ponto em que esse peso está aplicado e o
fulcro e que d2 é a distância entre o ponto de aplicação da força exterior Fr
e o fulcro, obtém-se a seguinte relação entre as variáveis:
2
1
d
PdF = .
equação 4
Se definirmos amplificação mecânica, ηm, como o quociente entre a amplitude do peso e a amplitude da força exterior que exercemos sobre a alavanca com o objectivo de içar o peso:
F
Pm ≡η ,
equação 5
então, combinando esta definição com a equação 4, facilmente se verifica que:
1
2
d
dm =η ,
equação 6

10
o que implica que, para as alavancas da classe 1, a amplificação mecânica possa ser maior ou menor do que 1, dependendo de d2 ser maior ou menor do que d1; para as alavancas da classe 2, a amplificação mecânica seja maior do que 1, ou seja, para içar um determinado peso é necessário aplicar uma força menor do que esse mesmo peso; e, por fim, nas alavancas da classe 3, a amplificação mecânica seja sempre menor do que 1, o que exige que a força aplicada seja maior do que o peso que se pretende içar. Um ponto interessante para a discussão sobre a utilização de alavancas nos sistemas biológicos é o reconhecimento de que a grande maioria dos membros dos animais pode ser representado por alavancas da classe 3. O que coloca a questão de qual a vantagem de utilizar esta classe, uma vez que, do ponto de vista mecânico, não parece ser vantajosa.
Na verdade, se atendermos à Figura 5, onde, para além da representação de uma alavanca da classe 1, se encontram indicadas as grandezas: L1 e L2, como sendo as distâncias percorridas pelos pontos de aplicação do peso e da força, respectivamente, e v1 e v2 como sendo as velocidades desses mesmos pontos quando está a ocorrer o movimento, obtemos, através de considerações geométricas:
2
1
2
1
L
L
d
d= .
equação 7
Além disso, atendendo à definição de velocidade, observa-se também que:
2
1
2
1
v
v
d
d= .
equação 8
Figura 5 - Relação entre as grandezas L1, L2, v1 e v2 num alavanca de classe 3. (A nota da Figura 2
volta a se adequar à força aplicada, estando apenas representados a sua direcção e sentido.) (Adap. de P. Davidovits, 2001).
Destas últimas relações facilmente se conclui que a relação das amplitudes dos movimentos e a relação das velocidades é inversamente proporcional à amplificação mecânica. O que implica que, em situações para as quais d1 seja maior do que d2 (como é o caso das alavancas de classe 3), a amplitude do movimento do ponto de aplicação do peso é maior do que a do ponto de aplicação da força e, além disso, o movimento nesse ponto é mais rápido, o que pode significar uma enorme vantagem em determinadas situações, nomeadamente aquelas que impliquem o lançamento de corpos.

11
2.1 O braço como exemplo de alavanca A título de exemplo discuta-se a aplicação dos conceitos introduzidos
anteriormente ao que se passa quando se eleva um objecto numa mão, através da acção dos músculos do braço. Como se poderá observar da Figura 6 esta situação é representável por uma alavanca da classe 3.
Figura 6 - Esquemas do que se passa em termos de forças quando um indivíduo iça um peso com
umas das mãos, como representado em a). (A nota da Figura 2 é também válida para a
representação da força aFr
da figura c)). (Adap. de P. Davidovits, 2001).
Na Figura 6 b) poder-se-á observar as variáveis importantes na discussão deste sistema. Nela encontram-se representados a distância da articulação óssea (que funciona como fulcro) ao ponto de ligação com o músculo (onde está aplicada a força muscular), o comprimento total do antebraço (que dá informação sobre o ponto de aplicação do peso do objecto) e do braço que, conjuntamente com o conhecimento do ângulo entre o braço e o antebraço, permitem a determinação do ângulo θ, representado na Figura 6 c). De facto, por considerações trignométricas6 é possível mostrar que o ângulo θ tem, nas condições descritas na Figura 6, o valor 72.7º.
Assim, as incógnitas do problema são: a força realizada pelo músculo, mFr
, a
força aplicada na articulação, aFr
e o ângulo formado pela direcção da força na
articulação e o antebraço, φ. Apliquem-se, então, os conhecimentos apresentados anteriormente, à situação em que o corpo içado tem um peso designado genericamente por P. Antes de mais, a soma das forças terá que ser igual a zero:
00rrrrrr=++⇔=∑ PFFF am
i
i .
equação 9
Ou, considerando, separadamente, as componentes segundo x e segundo y:
PFF
FF
am
am
+=
=
φθ
φθ
sensen
coscos.
equação 10
Para além destas equações, é necessário acrescentar a expressão que resulta da soma dos momentos das forças ter, também, que ser nula (equação 3). Atendendo a que, em
relação ao fulcro, é possível considerar duas forças com momentos opostos ( mFr
, que
6 Ver ANEXO C.

12
seria responsável por uma rotação segundo o sentido contrário ao dos ponteiros do
relógio e Pr
, que seria responsável por uma rotação no sentido dos ponteiros do relógio) é possível escrever, para que haja equilíbrio:
( )P
PF
b
PdFPdbF
m
mm
5.1072.6ºsen4
40sen
º90sensen
≅×
=
=⇔=θ
θ.
As distâncias b e d são as representadas na Figura 6 c).
Através dos cálculos fica, então, claro que a força muscular realizada pelo bícepedes necessária para levantar um objecto na mão é cerca de 10 vezes superior ao peso desse objecto.
Retomando a equação 10, podemos, agora, calcular a força aplicada na articulação e a direcção dessa força:
( )( )
=
=⇔⇔
=
=⇔
+=
=
º0.70
6.9...
sen02.9
cos14.3
senº6.72sen5.10
cosº6.72cos5.10
φφ
φ
φ
φ PF
FP
FP
PFP
FPa
a
a
a
a.
Repare-se, ainda, que nestes cálculos não foi tido em atenção o peso do braço, que, obviamente, em análises mais rigorosas, terá que ser considerado.
2.2 As costas como exemplo de alavanca Tal como o movimento do antebraço pode ser analisado aproximando-o ao de
uma alavanca, também muitos outros movimentos apoiados nos músculos esqueléticos aceitam a mesma abordagem. Nesta secção considerar-se-á o que se passa em termos de forças aplicadas quando um indivíduo se inclina, como mostra a Figura 7.
Figura 7 - Esquema do que se passa em termos de forças quando um indivíduo se inclina. (Adap.
de P. Davidovits, 2001).

13
Neste caso, considera-se que o fulcro da alavanca se encontra localizado na
quinta vértebra lombar. As forças aplicadas são: 1Pr
, peso do tronco que, embora esteja uniformemente distribuído pelas costas, se pode considerar aplicado no centro de
massa das mesmas (ponto E), ou seja, aproximadamente a meio; 2Pr
, o peso da cabeça e dos membros anteriores, que está fundamentalmente aplicado no extremo das costas
(ponto B); mFr
, a força exercida pelo músculo erector espinal, que se encontra ligado à
coluna vertebral a cerca de dois terços a partir da região mais posterior (representado
pelo ponto D) e fFr
, a força aplicada sobre o fulcro (ponto A). A partir de medidas
médias é possível assumir que, para uma inclinação de 30º da coluna vertebral (ver Figura 7 b) ) o ângulo entre o músculo e a coluna vertebral é de 12º. Além disso, para um homem com massa de 70 kg o peso do tronco é tipicamente 320 N e o peso da cabeça e dos braços é de aproximadamente 160 N.
Similarmente ao exemplo anterior, comece-se por aplicar a expressão do equilíbrio das forças (equação 1), já subdividida nas suas componentes segundo x e segundo y:
φ
φ
senº72cos
cossen72º
21 fm
fm
FFPP
FF
=++
=.
equação 11
Em seguida, aplique-se a expressão referente aos momentos das forças, considerando d o comprimento das costas:
N199814.0277º12sen3
2sen60º
2
1320sen60º160
º12sen3
2sen60º
2
1sen60ºº12sen
3
2sen60º
2sen60º 2121
≅⇔=⇔=××+×
=+⇔=+
mmm
mm
FFF
FPPd
Fd
PdP
.
Retomando a equação 11 e substituindo o valor da força muscular, obtém-se o valor das restantes variáveis:
=
=⇔
=++
=
φ
φ
φ
φ
sen1097
cos0019
senº72cos1998160320
cossen72º1998
f
f
f
f
F
F
F
F,
dividindo uma equação por outra é possível encontrar o ângulo φ:
30.0º1900
1097tg =⇔= φφ ,
e, por fim, substituindo numa das equações, encontra-se o valor da força exercida no fulcro:
N2193=fF .
Note-se que estes valores são obtidos apenas quando o indivíduo permanece na posição indicada. Valores superiores para as forças seriam obtidos se o indivíduo estivesse a segurar num peso suplementar.

14
3. Elasticidade e Compressão Uma parte significativa da Mecânica aplicada ao corpo humano diz respeito ao
efeito que as forças têm no movimento do corpo. No entanto, a aplicação de forças não provoca apenas movimentos, mas pode ser responsável por deformações nos tecidos: esticando-os, comprimindo-os, dobrando-os ou torcendo-os. Esta área tem particular interesse uma vez que, se até determinados valores das forças aplicadas, o corpo tem capacidade de regressar ao estado inicial (a esta propriedade dá-se o nome de elasticidade), noutras ocasiões, para valores superiores das forças, a deformação provocada no corpo não é recuperável ou, em casos limites, pode haver ruptura dos tecidos.
3.1 Distensão e compressão de corpos por acção de uma força
Como já se referiu, os corpos possuem a propriedade de, quando sujeitos a forças suficientemente pequenas, sofrerem deformações temporárias, regressando à situação inicial logo que a força cessa. Nesta secção serão abordados alguns conceitos úteis na descrição deste tipo de fenómeno e também o comportamento dos tecidos quando sujeitos a forças de maior intensidade que causam danos permanentes e/ou rupturas. Por simplicidade, iremos apenas referir as deformações associadas à distensão e compressão de corpos, deixando de parte a análise das deformações por dobragem ou torção.
Comece-se por definir pressão (que poderá ser de compressão ou de distensão, consoante tenda a diminuir ou aumentar as dimensões do corpo em que está aplicada). A pressão, P, a que um corpo fica sujeito é definida como a força aplicada a esse corpo, F, por unidade de área da secção transversal, A (ver Figura 8):
A
FP ≡ .
equação 12
Figura 8 - Deformação provocada num corpo (representado a cinzento) por acção de forças: a)
de distensão e b) de compressão.
Pode ainda definir-se deformação de um corpo como a razão entre a variação do seu comprimento, ∆l, (que, note-se, pode ser no sentido de aumentar ou diminuir a sua dimensão) e o seu comprimento, l:
l
l∆≡ε .
equação 13
a) b)

15
Um dado importante no estudo dos efeitos mecânicos provocados num corpo sujeito a pressões quer de compressão, quer de distensão, é a relação existente entre a pressão e a deformação, que é geralmente encontrada experimentalmente e é característica do material em estudo. Na Figura 9 a) encontra-se esquematizado esse comportamento num gráfico que representa a pressão em função da deformação, para um material dúctil7. Nesse gráfico, são estabelecidos quatro pontos: até ao ponto A a deformação varia linearmente com a pressão exercida; entre o ponto A e o ponto B o material, embora sofra uma deformação que ainda é reversível, esta deixa de ser linearmente proporcional à pressão; entre o ponto B e o ponto C a deformação cresce muito rapidamente com a pressão e as deformações passam a ser permanentes, embora, geralmente, não degradem de forma significativa o desempenho do material; entre o ponto C e o ponto D, as deformações são já muito significativas e no ponto D (à ordenada do ponto D dá-se o nome de pressão de ruptura) ocorre ruptura do material. Enquanto que nos materiais dúcteis os pontos C e D se encontram afastados, nos materiais quebradiços estes dois pontos encontram-se muito juntos, como é, por exemplo, o tecido ósseo (Figura 9 b)). Deve ainda chamar-se a atenção para a existência de fenómenos de fatiga, ou seja, se o ponto C for frequentemente atingido é observável um desvio deste ponto para a esquerda, com o consequente desvio do ponto de ruptura, pelo que o material quebrará mais facilmente, mesmo quando sujeito a pressões de valores menos elevados. a) b)
Figura 9 - a) Comportamento de um metal dúctil - gráfico da pressão em função da deformação: até A a deformação varia linearmente com a pressão aplicada, entre A e B a deformação ainda é reversível, entre B e C as deformações passam a ser permanentes e no ponto D ocorre ruptura do
material. Em b) encontra-se representado um gráfico semelhante, mas referente ao comportamento de tecido ósseo. É de notar que sendo o osso um material quebradiço o ponto D encontra-se praticamente sobreposto ao ponto C. Além disso, atendendo a que os pontos A, B e C
correspondem a compressões de igual intensidade às distensões representadas por A, B e C, verifica-se que o osso se comporta de forma muito distinta quando as forças a que é sujeito são de
compressão ou de distensão. (Adapt. de Kane e Sternheim, 1988).
Pelo facto de a deformação entre a origem dos eixos e o ponto B ser apenas temporária, considera-se que o material tem, nesta gama, um comportamento elástico. Além disso, a análise dos gráficos da Figura 9 sugere que até ao ponto A o corpo possa ser caracterizado pelo declive da recta que representa a razão entre a tensão e a deformação, e ao qual se dá o nome de módulo de Young, Y:
7 Um material diz-se dúctil quando é maleável, ou seja, quando é facilmente transformado em fio.

16
εP
Y = .
equação 14
É de notar também que, para cada material, existem dois módulos de Young, um respeitante às pressões de compressão, outro às pressões de distensão.
3.2 Elasticidade dos tecidos biológicos De entre os tecidos biológicos, podemos distinguir os tecidos ósseos e os
tecidos moles, os quais têm, como veremos, comportamentos muito distintos no que respeita à sua elasticidade.
Ao analisar a composição dos tecidos ósseos verifica-se que estes são maioritariamente constituídos por minerais (70%) e por proteínas (20%), sendo estes dois componentes os principais responsáveis pelas propriedades elásticas dos ossos. É interessante observar que estes dois materiais têm comportamentos muito distintos quando sujeitos a forças de distensão e de compressão. Observe-se o gráfico da Figura 10 e a Tabela 1, onde estão apresentados a dependência da deformação com as pressões de compressão e de distensão e os módulos de Young dos ossos e das suas componentes mineral e proteica.
Módulo de Young (1010 N m-2)
Compressão osso compacto 1.02 componente mineral 0.64 componente proteica <0.001 Distensão osso compacto 2.24 componente mineral 1.66 componente proteica 0.02
Tabela 1 - Módulo de Young do tecido ósseo e das suas componentes em separado, quer para forças de compressão, quer de distensão. (Adapt. J.B. Marion e W.F. Hornyak, 1985).
deformação
tensão
Figura 10 - Gráfico qualitativo sobre a dependência da deformação sofrida por tecido ósseo compacto e pelas suas componentes em separado. O lado direito do gráfico corresponde a tensões
de distensão, enquanto que no lado esquerdo está representado o comportamento associado a tensões de compressão. (Adapt. J.B. Marion e W.F. Hornyak, 1985).
Osso compacto
Componente mineral
Componente proteica
17
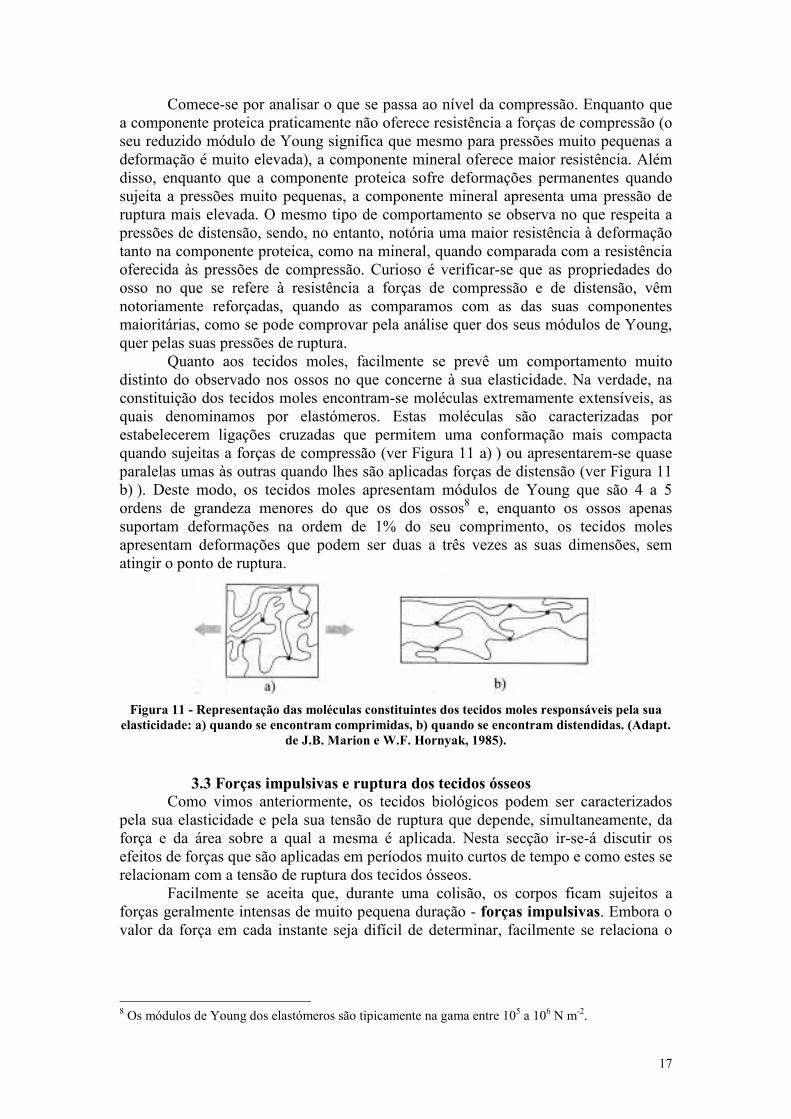
Comece-se por analisar o que se passa ao nível da compressão. Enquanto que a componente proteica praticamente não oferece resistência a forças de compressão (o seu reduzido módulo de Young significa que mesmo para pressões muito pequenas a deformação é muito elevada), a componente mineral oferece maior resistência. Além disso, enquanto que a componente proteica sofre deformações permanentes quando sujeita a pressões muito pequenas, a componente mineral apresenta uma pressão de ruptura mais elevada. O mesmo tipo de comportamento se observa no que respeita a pressões de distensão, sendo, no entanto, notória uma maior resistência à deformação tanto na componente proteica, como na mineral, quando comparada com a resistência oferecida às pressões de compressão. Curioso é verificar-se que as propriedades do osso no que se refere à resistência a forças de compressão e de distensão, vêm notoriamente reforçadas, quando as comparamos com as das suas componentes maioritárias, como se pode comprovar pela análise quer dos seus módulos de Young, quer pelas suas pressões de ruptura. Quanto aos tecidos moles, facilmente se prevê um comportamento muito distinto do observado nos ossos no que concerne à sua elasticidade. Na verdade, na constituição dos tecidos moles encontram-se moléculas extremamente extensíveis, as quais denominamos por elastómeros. Estas moléculas são caracterizadas por estabelecerem ligações cruzadas que permitem uma conformação mais compacta quando sujeitas a forças de compressão (ver Figura 11 a) ) ou apresentarem-se quase paralelas umas às outras quando lhes são aplicadas forças de distensão (ver Figura 11 b) ). Deste modo, os tecidos moles apresentam módulos de Young que são 4 a 5 ordens de grandeza menores do que os dos ossos8 e, enquanto os ossos apenas suportam deformações na ordem de 1% do seu comprimento, os tecidos moles apresentam deformações que podem ser duas a três vezes as suas dimensões, sem atingir o ponto de ruptura.
Figura 11 - Representação das moléculas constituintes dos tecidos moles responsáveis pela sua
elasticidade: a) quando se encontram comprimidas, b) quando se encontram distendidas. (Adapt. de J.B. Marion e W.F. Hornyak, 1985).
3.3 Forças impulsivas e ruptura dos tecidos ósseos
Como vimos anteriormente, os tecidos biológicos podem ser caracterizados pela sua elasticidade e pela sua tensão de ruptura que depende, simultaneamente, da força e da área sobre a qual a mesma é aplicada. Nesta secção ir-se-á discutir os efeitos de forças que são aplicadas em períodos muito curtos de tempo e como estes se relacionam com a tensão de ruptura dos tecidos ósseos.
Facilmente se aceita que, durante uma colisão, os corpos ficam sujeitos a forças geralmente intensas de muito pequena duração - forças impulsivas. Embora o valor da força em cada instante seja difícil de determinar, facilmente se relaciona o
8 Os módulos de Young dos elastómeros são tipicamente na gama entre 105 a 106 N m-2.

18
valor médio da força com a variação da quantidade de movimento ou momento linear, através do teorema do impulso9:
t
mvmvFmvmvtFpI
if
medifmed ∆
−=⇔−=∆⇔∆= ,
equação 15
onde: I - impulso da força aplicada ao corpo; ∆p - variação do momento linear do corpo; Fmed - força média aplicada ao corpo durante a colisão; ∆t - período durante o qual a força está a ser aplicada; m - massa do corpo; vi e vf - velocidades inicial e final do corpo (ou seja, antes e depois da colisão). Analisando a equação 15, facilmente se verifica que, para a mesma variação de quantidade de movimento, a força média aplicada é muito dependente do intervalo de tempo. Por este motivo, os efeitos de uma queda são tão distintos quando a recepção ao solo é feita sobre um material duro (que reduz o intervalo de tempo) ou num material mole (onde o intervalo de tempo de aplicação da força é consideravelmente aumentado). A mesma justificação é válida quando se trata de compreender os efeitos de uma queda em que o indivíduo flicta as pernas, ao contactar o chão. Neste caso, esses efeitossão muito menores do que quando a queda ocorre sobre os membros esticados, uma vez que a chegada ao chão demora, no primeiro caso, significativamente mais. Para ilustrar estes conceitos analise-se qual a altura máxima a que um indivíduo se pode atirar sem que haja ruptura dos ossos das pernas. Para tanto, será, obviamente, necessário fazer-se algumas aproximações. O tempo estimado de colisão, ∆t, de uma queda num chão de cimento, quando o indivíduo cai com as pernas juntas não flectidas é aproximadamente 10-2 s. Além disso a pressão máxima de ruptura dos tecidos ósseos, P, é de 108 N m-2. Se assumirmos ainda que a queda é totalmente suportada nos calcanhares, então, a área, A, sobre a qual a força é aplicada, é de aproximadamente 2 cm2. E, por fim, considera-se a massa do indivíduo de 70 kg. Comece-se por recordar que a velocidade, v, de chegada ao solo a partir de uma altura h é dada pela expressão (que poderá ser deduzida com o recurso à equação 119, à equação 124 e à equação 126 do ANEXO B):
ghv 2= , equação 16
onde g é a aceleração da gravidade. Como, após a queda, a velocidade final do corpo é nula, a variação do seu momento linear é:
ghmmvp 2==∆ ,
equação 17 9 Repare-se que, embora a abordagem aqui seja unidireccional, ou seja, assume-se que o movimento é realizado apenas numa direcção, esta expressão tem, no seu formato mais geral, carácter vectorial, visto que as grandezas: impulso, momento linear, força e velocidade são grandezas vectoriais.

19
e, portanto:
gm
tPAh
t
ghmPA
t
pFmed 2
12 2
∆=⇔
∆=⇔
∆∆= .
Substituindo valores:
cm 41.6m 416.08.92
1
70
10102102248
==×
×××=
−−
h
É claro que este valor poderá ser drasticamente alterado se as condições forem outras, pelo que este valor tem apenas carácter indicativo. O tempo da colisão, por exemplo, poderá ser aumentado para 8 vezes se o indivíduo flectir as pernas, o que alterará significativamente o resultado. E mesmo a área de impacto é bastante variável, dependendo do chão e da forma como o indivíduo se defende da queda.

20
II COMPLEMENTOS DE MECÂNICA DE FLUIDOS Os fluidos são substâncias que, devido ao tipo de forças intermoleculares existentes entre os seus constituintes, não conseguem manter uma forma própria, adquirindo a forma dos recipientes que os contêm. Nesta definição incluem-se, indubitavelmente, todos os líquidos e gases. Como facilmente se compreende, a grande diferença entre estes dois estados da matéria reside na sua compressibilidade: enquanto os gases alteram significativamente o seu volume, quando sujeitos a forças, os líquidos não. Neste capítulo ir-se-á estudar o comportamento dos líquidos, deixando o estudo dos gases para mais tarde.
4. Aplicações da hidroestática ao corpo humano Uma grandeza particularmente importante no estudo dos fluidos é a pressão.
A pressão é uma grandeza escalar, cuja unidade em S.I. é o Pa (pascal) e que é definida pela razão entre o valor da força, F, exercida perpendicularmente à superfície A
10:
A
FP ≡ .
equação 18
A sua unidade deve o nome a um importante cientista que deu preciosos contributos para o estudo dos fluidos Blaise Pascal (1623-1662) e, em particular, enunciou o Princípio com o seu nome, no qual se estabelece que: “A pressão aplicada
num ponto no interior de um fluido é transmitida, sem perdas, a qualquer outro ponto
do fluido e às paredes do recipiente no qual este se encontra”. Matematicamente, este princípio é expresso através da equação 19 está inerente na expressão que relaciona a pressão num determinado ponto A de um fluido, PA, com a pressão num outro ponto B desse mesmo fluido, PB; a densidade do fluido, ρ, a aceleração da gravidade, g, e a diferença de alturas entre o ponto A e o ponto B, h, num fluido em equilíbrio:
ghPP AB ρ+= . equação 19
Em particular, se o ponto A for um ponto à superfície do fluido, a pressão em A é substituída pela pressão atmosférica (ver, por exemplo, a Figura 12) e tem-se:
ghPP atmB ρ+= . equação 20
Figura 12 - Ilustração do princípio de Pascal. (Adapt. E.R. Jones e R.L. Childers, 1993).
10 Repare-se nas semelhanças desta definição com a fornecida anteriormente para as pressões de compressão e de distensão a que os sólidos podem ficar sujeitos.

21
Várias são as aplicações desta lei ao corpo humano. A Figura 13, por exemplo, apresenta a pressão sanguínea em vários pontos do corpo humano, comparando-a com a pressão correspondente a uma coluna de sangue com diferentes alturas. Como se pode observar, enquanto que um indivíduo deitado apresenta pressões sanguíneas semelhantes tanto ao nível dos pés, como do coração, como da cabeça; quando o indivíduo se encontra em pé, essas pressões são notoriamente distintas, uma vez que a pressão, conforme se conclui da equação 19, varia com a altura.
Figura 13 - A altura das colunas representa a pressão sanguínea em diferentes partes do corpo e em diferentes posições. (Adap. de P. Davidovits, 2001).
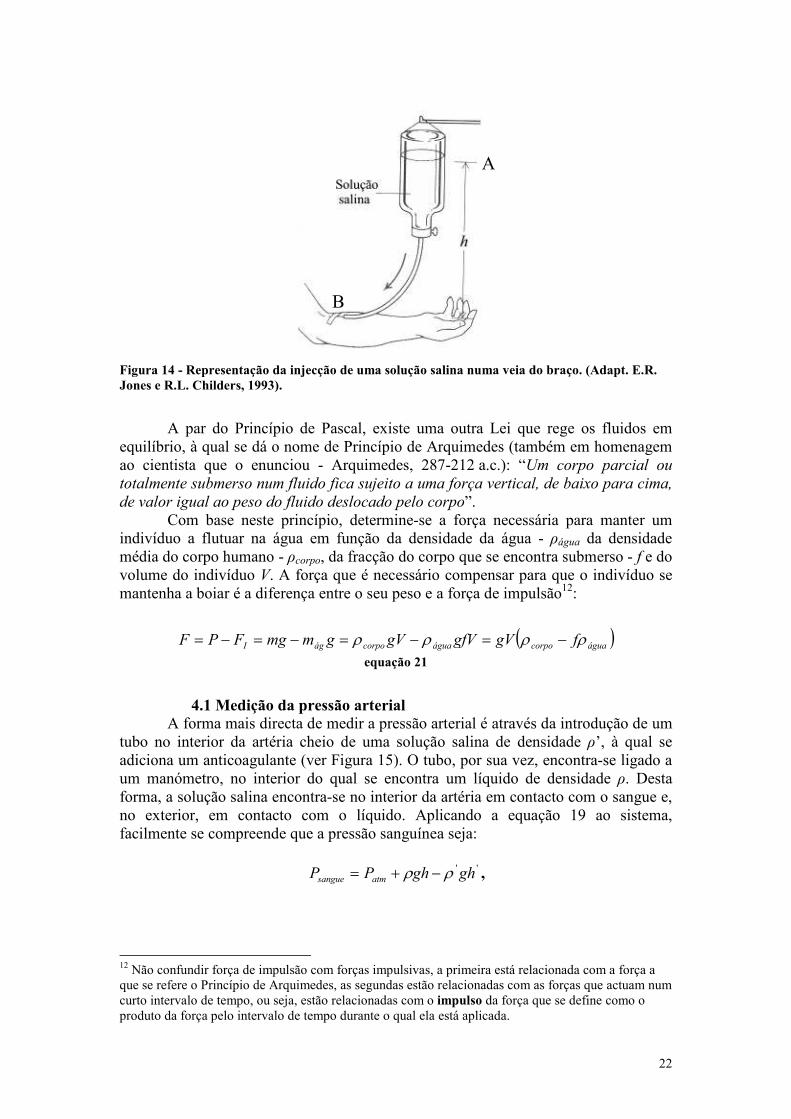
Analise-se também o que se passa quando a um indivíduo é injectada uma solução salina (ver Figura 14). Assuma-se que a densidade da solução é de 1.0 x 103 kg / m3 e que a pressão no interior da veia é 2.4 x 103 Pa11. Façamos uma estimativa da altura a que o recipiente se deve encontrar a partir do braço do doente, para que o líquido efectivamente entre na veia. Para efectuar os cálculos comece-se por resolver a equação 19 em ordem à altura:
g
PPh AB
ρ−
= ,
e, seguidamente, substitua-se os valores, tendo em conta que a pressão no ponto B corresponde à pressão na veia e que a pressão no ponto A é a pressão atmosférica:
8.9101
104.23
3
××
×=h = 0.245 m = 24.5 cm.
Ou seja, a altura entre a superfície livre da solução e o braço do indivíduo deverá ser superior a 24.5 cm.
11 Não esquecer que a esta pressão acresce também a pressão atmosférica a que todas as veias do corpo estão sujeitas.
22
Figura 14 - Representação da injecção de uma solução salina numa veia do braço. (Adapt. E.R. Jones e R.L. Childers, 1993).
A par do Princípio de Pascal, existe uma outra Lei que rege os fluidos em equilíbrio, à qual se dá o nome de Princípio de Arquimedes (também em homenagem ao cientista que o enunciou - Arquimedes, 287-212 a.c.): “Um corpo parcial ou
totalmente submerso num fluido fica sujeito a uma força vertical, de baixo para cima,
de valor igual ao peso do fluido deslocado pelo corpo”. Com base neste princípio, determine-se a força necessária para manter um indivíduo a flutuar na água em função da densidade da água - ρágua da densidade média do corpo humano - ρcorpo, da fracção do corpo que se encontra submerso - f e do volume do indivíduo V. A força que é necessário compensar para que o indivíduo se mantenha a boiar é a diferença entre o seu peso e a força de impulsão12:
( )águacorpoáguacorpoágI fgVgfVgVgmmgFPF ρρρρ −=−=−=−=
equação 21
4.1 Medição da pressão arterial
A forma mais directa de medir a pressão arterial é através da introdução de um tubo no interior da artéria cheio de uma solução salina de densidade ρ’, à qual se adiciona um anticoagulante (ver Figura 15). O tubo, por sua vez, encontra-se ligado a um manómetro, no interior do qual se encontra um líquido de densidade ρ. Desta forma, a solução salina encontra-se no interior da artéria em contacto com o sangue e, no exterior, em contacto com o líquido. Aplicando a equação 19 ao sistema, facilmente se compreende que a pressão sanguínea seja:
'' ghghPP atmsangue ρρ −+= ,
12 Não confundir força de impulsão com forças impulsivas, a primeira está relacionada com a força a que se refere o Princípio de Arquimedes, as segundas estão relacionadas com as forças que actuam num curto intervalo de tempo, ou seja, estão relacionadas com o impulso da força que se define como o produto da força pelo intervalo de tempo durante o qual ela está aplicada.
A
B

23
admitindo que o líquido no interior da manómetro tem uma superfície livre em contacto com a atmosfera e que a diferença ( )'hh − corresponde à diferença de alturas entre as duas superfícies livres do líquido no interior do manómetro.
Figura 15 - Esquema de medida da pressão de uma artéria invasivamente. (Adapt. Kane e Sternheim, 1988)
Este sistema de leitura da pressão arterial é, no entanto, bastante incómodo e desaconselhado. Por esse motivo, habitualmente, utiliza-se um sistema indirecto com o recurso a um aparelho denominado esfingmomanómetro. O sistema, representado na Figura 16, é composto por um saco de ar que é colocado no braço13, uma bomba que introduz ar no saco, uma válvula que liberta ou não o ar, um manómetro que mede a pressão do ar no interior do saco e um estetoscópio que, colocado por cima da artéria, mede o ruído que o sangue faz ao passar. É útil lembrar que o sangue circula através das artérias devido ao efeito de bomba do coração. Este facto determina que, na realidade, a pressão sanguínea oscile entre dois extremos: um valor máximo (pressão sistólica) que corresponde à contracção cardíaca e, por conseguinte, à expulsão do sangue pelos ventrículos, e um valor mínimo (pressão diastólica) que corresponde ao período de descontracção cardíaca (ver Figura 17).
Figura 16 - Esquema de um esfingmomanómetro. (Adapt. Kane e Sternheim, 1988)
Do ponto de vista clínico, é, obviamente, importante medir ambas as pressões.
Ora o mecanismo utilizado para o fazer é bastante simples: o saco é insuflado até um determinado valor de pressão (superior à pressão sistólica), pelo Princípio de Pascal a 13 Sendo a medida feita ao nível do braço e estando este à mesma altura do coração, o valor obtido para a pressão arterial é uma boa estimativa da pressão cardíaca.

24
pressão no saco, propaga-se pelos tecidos do braço chegando à artéria e impedindo o sangue de passar. Nesse instante, é impossível ouvir qualquer ruído através do estetoscópio. Liberta-se, então, cuidadosa e lentamente algum ar do saco, através da válvula, até atingir um ponto em que é audível um ruído ritmado (ver Figura 17) correspondente à passagem do sangue, apenas durante os instantes em que a pressão arterial é ligeiramente superior à pressão do saco. No momento em que esse ruído começa a ser ouvido, mede-se a pressão no manómetro e é esta que corresponde à pressão sistólica. Prossegue-se, então, com o processo de libertação do ar até o ruído deixar de se ouvir. Nesse momento, significa que a pressão arterial é menor do que a pressão do saco, uma vez que o sangue circula na artéria sem a oposição de pressões externas14.
Figura 17 - Representação do mecanismo de funcionamento de um esfingmomanómetro. (Adapt. E.R. Jones e R.L. Childers, 1993).
5. Tensão superficial e capilaridade Como se sabe, as moléculas constituintes de um líquido interactuam através de
forças atractivas que as mantêm num estado condensado, forças de coesão. Numa molécula que se encontre no interior de um líquido, a soma dessas forças, uma vez que se encontram igualmente distribuídas em todas as direcções, é nula. No entanto, o mesmo já não acontece com as moléculas que se encontram na superfície do líquido. Essas moléculas não sofrem influência de moléculas acima delas e, portanto, a força resultante que lhes está aplicada tem o sentido do exterior para o interior do líquido15. Essa força resulta numa contracção da superfície do líquido a qual passa a comportar-se como uma membrana sob uma certa tensão. Esta situação pode ser descrita por uma força tangencial à superfície do líquido. Deste formalismo resulta a grandeza tensão superficial, que é descrita do seguinte modo: considere-se um segmento de recta, l, numa dada direcção sobre a superfície livre do líquido e F a força mínima perpendicular a esse segmento que é necessário aplicar-lhe para que a
14 Mais correctamente, o sangue nestas condições circula sem turbulência, conceito que se irá abordar mais tarde, e, por isso, a sua circulação não é audível. 15 Em rigor, as moléculas pertencentes ao líquido, mas que se encontram na superfície deste, sofrem influência de moléculas acima delas constituintes do gás sob o qual o líquido se encontra. No entanto, como as forças de coesão entre as moléculas do gás e as moléculas do líquido são muito diferentes e o resultado continua válido.

25
área da superfície do líquido sofra deformação, a tensão superficial será, então, dada pela razão:
l
F≡σ .
equação 22
Um outro fenómeno resultante das forças de coesão nos líquidos e observável nos pontos em que a superfície livre do líquido toca no recipiente que o contém é o de capilaridade. Na verdade, as moléculas que se encontram na vizinhança das paredes do recipiente sofrem forças de atracção das moléculas constituintes do recipiente, forças de aderência. E neste caso duas situações poderão ocorrer: ou as forças de aderência são superiores à força de coesão do líquido e, então, o líquido tende a subir pelas paredes do recipiente (ver Figura 18 a) ), ou as forças de aderência são menores do que as de coesão e a superfície livre do líquido tende a curvar para o interior do mesmo (ver Figura 18 b) ).
Figura 18 - Representação do comportamento dos líquidos em contacto com um recipiente, devido às forças de aderência. (Adap. de P. Davidovits, 2001).
O contacto entre o líquido e as paredes do recipiente é, pois, caracterizado pelo ângulo representado na Figura 18 que é dependente da natureza do líquido e do material do recipiente. Na Tabela 2 pode-se observar diversos ângulos de contacto, para diferentes pares de interfaces.
Interfaces Ângulo de contacto Água-vidro (limpo) 0º Álcool etílico-vidro (limpo) 0º Mercúrio-vidro 140º Água-prata 90º Água-parafina 107º
Tabela 2 -Ângulo de contacto de diversas interfaces líquido-sólido. (Adap. de P. Davidovits, 2001).
O fenómeno de capilaridade é particularmente notório quando se introduz um tubo muito fino no interior de um líquido. Nessa situação é possível observar-se a subida do líquido no interior do tubo (ver Figura 19 a) ) ou a sua descida (ver Figura 19 b) ).

26
Figura 19 - Ilustração do fenómeno de capilaridade. (Adap. de P. Davidovits, 2001).
Em seguida, calcular-se-á a variação da altura do líquido em função da tensão
superficial, T; do raio do tubo, R; da densidade do líquido, ρ; do ângulo de contacto, θ; e da aceleração da gravidade.
O peso da coluna de líquido é:
hRgVgmgP 2πρρ === . equação 23
A força máxima associada à tensão superficial em redor da coluna de líquido será, tendo em conta o que anteriormente foi dito:
RTFm π2= . equação 24
Ora a componente da força superficial que compensa o peso é a vertical, ou seja, será o produto: θcosmF e, portanto, visto que o líquido se encontra em
equilíbrio é válida a igualdade:
gR
ThhRgRThRgFm ρ
θπρθππρθ
cos2cos2cos 22 =⇔=⇔= .
equação 25
Uma outra consequência interessante da tensão superficial é o facto de tanto as bolhas, como as gotas terem um formato esférico. Para compreender este efeito, comece-se por referir que o valor da tensão superficial pode ser interpretado como uma energia por unidade de área16. Aplicando o critério de energia mínima, facilmente se compreende que, para um determinado líquido (o que corresponde a uma dada tensão superficial), a geometria que minimiza a energia é aquela que corresponde à menor área. E, como é sabido, a esfera é o sólido geométrico que menor área superficial tem, para um dado volume considerado.
16 Para entender esta equivalência basta fazer uma análise dimensional: a tensão superficial tem unidade N m-1, que é equivalente a N m m-2, ou seja, J m-2 que corresponde, efectivamente, a uma unidade de energia por área.

27
Relacionada com este aspecto está a Lei de Laplace que estabelece a relação entre as diferenças de pressão no interior, Pi, e no exterior, Po, de uma gota; o seu raio, r, e a tensão superficial do líquido de que é formada, σ:
rPP oi
σ2=− .
equação 26
Note-se que esta diferença de pressão é dependente do sistema. Por exemplo,
ao analisar-se o que se passa com uma bolha17 a diferença de pressão no interior e no exterior da bolha é duas vezes superior, vindo dada por:
rPP oi
σ4=− .
equação 27
Ambas as expressões resultam em duas conclusões extremamente interessantes: o primeiro é o facto de a pressão no interior de uma gota (o mesmo é válido para uma bolha) ser maior no interior do que no exterior da mesma; o segundo refere que, para a mesma tensão superficial, quanto maior for o raio, menor será a pressão no interior da gota (ou bolha). Embora com ligeiras adaptações18, é este o motivo pelo qual se colocarmos em contacto dois balões semelhantes, um deles menos cheio do que o outro, verifica-se que o balão menos cheio se esvazia, aumentando o raio do outro (a pressão no interior do balão de maior raio é menor do que a pressão no interior do balão de menor raio).
5.1 Funcionamento dos pulmões e tensão superficial Se atendermos à anatomia pulmonar, recordamos que a troca de gás entre os
pulmões e os vasos sanguíneos ocorre ao nível dos alvéolos, que são pequenos sacos cujos raios são, em média, de 60 µm. Se o mecanismo descrito no final da secção anterior fosse aplicável aos alvéolos, facilmente se compreenderia que a respiração era impossível, uma vez que o ar dos alvéolos de menor raio transferir-se-ia para os alvéolos de maior raio, criando uma situação limite em que alguns alvéolos rebentariam e outros colapsariam. Ora esta situação não se observa porque, a cobrir as paredes internas dos alvéolos, se encontra um líquido contendo lipoproteínas19 que alteram as propriedades elásticas da membrana. De facto, verifica-se que, por acção dessas proteínas, quanto menor for o raio dos alvéolos, menor será a sua tensão superficial, pelo que a tendência para, nestas condições, a pressão interior aumentar, é
17 Uma bolha, ao contrário de uma gota, é formada por uma fina camada de líquido, devendo considerar-se duas superfícies (a interior e a exterior), e, portanto, os efeitos da tensão superficial são duplicados. 18 Deve ter-se em atenção que num balão a tensão superficial se altera com o raio, enquanto que numa bolha a tensão superficial se mantém constante (o aumento de raio numa bolha é conseguido à custa da diminuição de espessura da película de líquido de que é feita). No entanto, a variação da tensão superficial num balão não é suficiente para que a maior parte dos resultados válidos para uma bolha não o sejam também para um balão. 19 A este líquido dá-se o nome de surfactante, uma vez que, tal como outros agentes com o mesmo nome, quando adicionado a algumas substâncias diminui-lhes a tensão superficial.

28
compensada com o aumento da elasticidade das paredes dos alvéolos e, portanto, os alvéolos menores não chegam a perder o seu gás interior.
O mesmo mecanismo explica como é possível, durante a respiração, a entrada e a saída de ar dos pulmões. Durante a exalação a pressão interior dos alvéolos diminui. Por outro lado, devido à contracção muscular os alvéolos tendem a diminuir o seu raio. Ora, nestas condições, se a tensão superficial da membrana dos alvéolos se mantivesse constante, estes tenderiam a colapsar, uma vez que a diferença de pressão não seria contrabalançada. O mecanismo contrário observar-se-ia durante a inalação, ou seja, a pressão no interior dos alvéolos aumentaria e devido à descontracção muscular o seu raio tenderia a aumentar, rebentando os alvéolos. Esta tendência só é contrariada, uma vez mais, devido à presença do agente surfactante que promove o aumento da elasticidade (diminuição da tensão superficial) para menores raios.
Este mecanismo, explica, pois, a extraordinária importância das concentrações de surfactante nos alvéolos. Aliás, uma das causas de morte de recém-nascidos, nomeadamente de bebés prematuros, é precisamente a falta de surfactante nos pulmões, o que dificulta imenso a sua respiração.
6. Aplicações da hidrodinâmica ao corpo humano
6.1 Movimento de fluidos não viscosos A hidrodinâmica é a área da mecânica dos fluidos que estuda o seu movimento
e, neste contexto, existem essencialmente duas leis especialmente relevantes: a equação de continuidade e a equação de Bernoulli. Ambas são baseadas em determinados pressupostos: a) que o fluido é ideal, o que significa que não tem viscosidade20, b) que é incompressível, c) que o escoamento é laminar (a velocidade de uma partícula do fluido num determinado ponto é constante no tempo) e d) o escoamento é não rotacional (um objecto que se coloque no interior do fluido não apresenta movimentos de rotação).
A equação de continuidade é baseada no facto de a quantidade de massa se manter constante e é traduzida matematicamente através da expressão:
2211 AvAv = , onde v1 representa a velocidade do fluido no troço 1 de um tubo através do qual se faz o escoamento em estudo (ver Figura 20), v2 a velocidade do fluido no troço 2, A1 a área da secção recta do troço 1 e A2 a área da secção recta do troço 2.
Figura 20 - Representação da equação da continuidade associada a um fluxo de fluido que circula num tubo cilíndrico com diferentes secções rectas. (Adapt. E.R. Jones e R.L. Childers, 1993).
20 A viscosidade é a grandeza que mede a fricção existente entre camadas adjacentes de um fluido e, do ponto de vista do escoamento de fluidos, um fluido ter viscosidade nula significa que qualquer que seja o ponto considerado num determinado troço, caracterizado por um determinado diâmetro, a velocidade do fluido é constante (ver Figura 20).

29
Tendo em conta que ao produto da velocidade do fluido pela área da secção recta se dá o nome de caudal:
vAQ ≡ , equação 28
uma outra forma de enunciar a equação de continuidade é dizer que o caudal de um escoamento laminar e não rotacional, de um fluido ideal é constante qualquer que seja a secção que se considere.
Quanto à equação de Bernoulli, esta é consequência da conservação da energia e, considerando, uma vez mais, dois troços de um tubo no qual circula um fluido é representada através da igualdade:
te2222
2111 c
2
1
2
1=++=++ vghPvghP ρρρρ
equação 29
onde P1 e P2 são as pressões do fluido respectivamente nos troços 1 e 2, v1 e v2 as suas velocidades nos mesmos troços, h1 e h2 a altura respectiva de cada troço, ρ a densidade do fluido e g a aceleração da gravidade. Retome-se, agora, a discussão feita em torno da pressão sanguínea em diferentes pontos do corpo. Para se ser completamente rigoroso, atendendo a que o sangue se encontra em movimento, a equação explicativa das diferenças de pressão em diferentes pontos do corpo humano deverá ser a equação de Bernoulli21 e não o Princípio de Pascal. No entanto, se admitirmos que a medida de pressão é feita em artérias com um diâmetro aproximado e que o seu caudal é idêntico, então a velocidade em cada uma delas será aproximadamente igual e a equação de Bernoulli reduz-se à equação 19 o que valida o raciocínio feito anteriormente acerca das diferenças de pressão sanguínea medidas em diferentes partes do corpo.
6.2 Movimento de fluidos viscosos Embora as equações referidas na secção anterior sejam aplicadas em muitas
situações práticas, há que ter em atenção que a maioria dos fluidos apresentam viscosidade. Em particular, a grande parte dos fluidos biológicos, cujo exemplo paradigmático é o sangue, são caracterizados por uma viscosidade não desprezável. Comece-se, então, por definir matematicamente viscosidade. Considere-se duas lâminas separadas por uma fina camada de fluido (ver Figura 21) de espessura
∆y. Mantendo-se a lâmina de baixo fixa e aplicando-se uma força Fr
na lâmina de cima, verifica-se que se estabelece-se uma variação da velocidade do fluido, v
r∆ à
medida que se consideram camadas sucessivas do fluido. Se A for a área de cada uma das lâminas, verifica-se a seguinte relação:
y
vAF∆∆
=η ,
equação 30
onde a constante de proporcionalidade η é a viscosidade do fluido. Uma análise dimensional desta grandeza revela que a sua unidade S.I. é o Pa s. 21 Repare-se que para que a equação de Bernoulli seja plenamente adequada a esta situação será necessário considerar o sangue como um fluido não viscoso, o que, na prática, não se verifica. Por este motivo, em secções posteriores, discutir-se-á a situação em que a viscosidade é considerada.

30
Figura 21 - Representação das varáveis envolvidas na definição de viscosidade de um líquido.
A consequência mais visível de se considerar a viscosidade de um fluido num escoamento é o seu perfil de velocidade ao longo de uma secção. Como se verifica na Figura 22, mesmo em fluxos laminares, desde que o fluido tenha viscosidade a sua velocidade varia com a distância ao centro do tubo, o que aconteceria em fluidos não viscosos sendo válida a expressão22:
( )( )22214
1raPP
lv −−=
η,
equação 31
onde as grandezas tomam os seguintes significados: v - velocidade do fluido a uma distância r do centro do tubo, a - raio do tubo, η - viscosidade do fluido, l - comprimento do tubo, (P1-P2) - diferença de pressões nas extremidades do tubo.
Figura 22 - Representação do perfil de velocidades num fluido viscoso que circula num tubo
cilíndrico. (Adapt. de J.B. Marion e W.F. Hornyak, 1985).
Assim, segundo a equação 31 é evidente que, considerando a viscosidade, o fluido que circula próximo das paredes do tubo possui uma velocidade praticamente zero e a velocidade máxima ocorre no seu centro. Da expressão anterior é, ainda, possível deduzir a Lei de Poiseuille, que é aquela que fornece o caudal que atravessa uma secção recta do tubo em função das variáveis anteriormente descritas:
( )21
4
8PP
l
aQ −=
ηπ
equação 32
Também relacionado com a viscosidade do fluido está o tipo de escoamento que este apresenta. Na verdade, em fluidos reais, com viscosidade não nula, 22 Considera-se que o tubo no interior do qual o líquido flui tem geometria cilíndrica.

31
verifica-se que para valores de velocidade do fluido abaixo de um certo valor, o escoamento é considerado laminar. No entanto, quando esse valor é ultrapassado, o escoamento passa a ser turbulento. Geralmente, prevê-se o tipo de escoamento de um determinado fluido empiricamente através da análise de um parâmetro, ao qual se dá o nome de Número de Reynolds. Este factor que, como se poderá verificar, é adimensional, é calculado, para o caso de um tubo cilíndrico através da expressão:
ηρ va2
=ℜ ,
equação 33
sendo v a velocidade média do fluido e tendo as restantes variáveis o significado anteriormente referido. Estabelece-se, então, que, quando o número de Reynolds tem um valor inferior a 2000 o escoamento é laminar, enquanto que quando o número de Reynolds for superior a 3000 o escoamento é turbulento. A gama entre 2000 e 3000 corresponde a uma situação intermédia, instável, em que o fluxo oscila entre o laminar e o turbulento.
6.3 Forças de atrito no interior de fluidos Quando objectos se movem no interior de fluidos viscosos e para valores de
velocidade considerados baixos, ficam sujeitos a forças de atrito proporcionais à viscosidade do fluido. Estabelece-se que para o caso de um objecto esférico que se mova num fluido, a força de atrito é proporcional à sua velocidade quando o número de Reynolds associado a esta geometria:
ηρrv=ℜ ,
equação 34
é menor do que 1. Nestas condições, cumpre-se a relação:
rvFa πη6= , equação 35
onde r é o raio do objecto, v a sua velocidade, ρ a densidade do fluido e η a sua viscosidade.
Assim, além das forças de impulsão, referidas a propósito da Lei de Arquimedes, um objecto no interior de um fluido com viscosidade fica sujeito a uma outra força que se opõe ao seu movimento, a qual, para valores adequados da velocidade do objecto, é proporcional a essa velocidade (ver Figura 23). Repare-se, a este respeito, que, o facto de a força de atrito sentida por objectos que se deslocam em fluidos ser proporcional à velocidade, implica que, ao contrário do que sucede nos sólidos23, a velocidade de objectos que caiem no interior de fluidos, não aumente sempre ao longo da sua trajectória, mas que exista uma velocidade limite, a partir da qual, todas as forças aplicadas se anulam. Determine-se, então essa velocidade limite. A condição é que a soma da força de atrito, Fa, com o impulso, I, iguale a força gravítica do objecto, Fgrav:
23 Nos sólidos, numa primeira aproximação, assume-se que a força de atrito é constante e, portanto, independente da velocidade com que os sólidos se deslocam uns relativamente aos outros.

32
agrav FIF += .
equação 36
Substituindo cada uma das forças pela sua expressão e considerando o objecto esférico, obtém-se24:
( )fluidoobj
fluidoobjfluidoobj
grv
rvrgrgrvgVgV
ρρη
πηπρπρπηρρ
−=⇔
⇔+=⇔+=
9
2
63
4
3
46
2
33
,
V é o volume do objecto, ρobj a sua densidade, r o seu raio, v a sua velocidade, ρfluido é a densidade do fluido e η a sua viscosidade. Neste caso é necessário que se cumpra a condição do diâmetro do recipiente ser muito maior do que o diâmetro da esfera.
Figura 23 - Representação das forças aplicadas a um objecto imerso num fluido com viscosidade
η e densidade ρfluido. (Adapt. E.R. Jones e R.L. Childers, 1993).
Para situações em que o número de Reynolds apresentado na equação 34 seja maior do que 1, é válido assumir-se que as forças de atrito são, por um lado, proporcionais ao quadrado da velocidade, por outro independentes da viscosidade do fluido. Nesse caso, a expressão da força de atrito vem dada por:
2
22
vrCF
fluido
Da
ρπ= ,
equação 37
sendo CD o coeficiente de atrito, obtido através de medidas experimentais e tendo as restantes variáveis o mesmo significado do que o descrito anteriormente.
24 Recorde-se que o volume de uma esfera é dado pela expressão 4/3 πr
3.

33
6.4 Aspectos da circulação sanguínea Os princípios nos quais a circulação sanguínea se baseia são, na sua maioria,
relacionados com os aspectos de movimento de fluidos explicados nas secções anteriores. Como é do conhecimento geral, a circulação sanguínea é responsável pelo transporte de oxigénio, nutrientes e outros produtos essenciais à vida das células e retira destas dióxido de carbono e diversos detritos resultantes do seu metabolismo.
A circulação sanguínea pode ser descrita de uma forma simples do seguinte modo: o sangue, após ser oxigenado nos pulmões dirige-se para a aurícula esquerda do coração passando pelas veias pulmonares. Em seguida, é transferido para o ventrículo esquerdo através da válvula25 mitral e deste é bombeado para todo o corpo. À saída do ventrículo esquerdo, passa pela válvula aórtica, que dá passagem para a artéria aorta e é conduzido através de uma rede complexa de artérias cada vez mais pequenas26, indo alimentar todas as células. Após as trocas gasosas, de nutrientes e de detritos existentes ao nível celular, o sangue regressa ao coração através de veias cada vez de maior dimensão27, até entrarem no coração através da veia cava em direcção à aurícula direita. A passagem da aurícula direita para o ventrículo direito é feita através da válvula tricúspide e, a partir do ventrículo direito, o sangue passa ainda na válvula pulmonar que dá acesso à artéria pulmonar que o conduz no sentido dos pulmões onde será oxigenado (ver Figura 24 e Figura 25).
Figura 24 -Esquema de um coração humano. (Adapt. Vander, Sherman e Luciano, 1998).
Para aplicar à circulação sanguínea alguns dos resultados discutidos anteriormente é necessário analisar-se as propriedades do sangue e assumir-se algumas aproximações. Antes de mais, deve ter-se presente que o sangue, embora 25 Repare-se que as válvulas cardíacas, tanto as que unem as aurículas aos ventrículos, como as que unem os ventrículos às artérias, têm como função garantir a unidireccionalidade do fluxo sanguíneo. O mau funcionamento das mesmas implica, invariavelmente, a existência de refluxos, com indesejáveis efeitos no funcionamento cardíaco. 26 Às artérias mais pequenas dá-se o nome de arteríolas e estas desembocam em capilares com a dimensão celular que permitem alimentar células individuais. 27 Similarmente ao que acontece com as artérias, às veias de menor dimensão dá-se o nome de vénulas.

34
seja, em muitas situações, considerado como um fluido homogéneo, na verdade, é constituído por diversas partículas em suspensão, o que, do ponto de vista de análise do seu escoamento, torna a sua descrição particularmente difícil, nomeadamente, quando os vasos que o conduzem são muito estreitos. Um segundo ponto, prende-se com a elasticidade dos vasos que conduzem o sangue. Apesar de se aceitar, nas abordagens mais simples, que o sangue circula através de tubos rígidos, esta aproximação não é verdadeira, uma vez que, como se sabe, as paredes dos vasos são extremamente elásticas, sendo, inclusivamente, um factor importante de regulação do fluxo sanguíneo como se discutirá adiante. Por fim, o sangue deverá ser considerado um fluido viscoso, sendo caracterizado por uma viscosidade aproximada de η = 4 x 10-3 Pa s e uma densidade ρ = 1.0595 x 103 Kg m-3.
Figura 25 - Esquema do sistema circulatório. (Adapt. de
http://www.cancer.help.org.uk/help/default.asp?page=116, consultado em Fevereiro de 2008).
Uma questão que se coloca é saber se o escoamento do sangue nos vasos sanguíneos é laminar ou turbulento. Para responder a este ponto é necessário conhecer qual a velocidade máxima do sangue circulante. Para um determinado caudal, quanto maior for a área da secção dos vasos, menor será a velocidade do fluido. Como facilmente se compreende, a área dos vasos através dos quais o sangue é conduzido aumenta com a distância ao coração28. Ou seja, a velocidade do sangue é maior nas grandes artérias. É, pois, útil analisar o que se passa ao nível da artéria aorta. Tendo em atenção que o caudal habitual do sangue é 8 x 10-5 m3 s-1 e que o diâmetro da artéria aorta é cerca de 2 cm, facilmente se calcula a velocidade média do sangue que nela circula:
( )1-
22
5
2s m 25.0
101
108=
××
×=⇒=⇔=⇔=
−
−
ππv
r
Qv
A
QvvAQ .
28 Repare-se que conforme nos afastamos do coração, o diâmetro dos vasos diminui, mas o seu número aumenta, de modo que o balanço é no sentido de a área total também aumentar.

35
Estamos, pois, em condições de calcular o número de Reynolds para esta situação:
1325104
25.01011006.123
23
=×
×××××=ℜ
−
−
.
Ou seja, o número de Reynolds é, em situações normais, menor do que o valor
limite de 2000. De onde se pode concluir que o fluxo é laminar. Deve, no entanto, realçar-se que, em situações de maior caudal que ocorrem, por exemplo, durante esforço físico, o número de Reynolds pode exceder o valor 2000 e, nesse caso, o fluxo na aorta, torna-se turbulento. Porém, cálculos realizados para outros vasos levam a concluir que, em situações normais, apenas ao nível da aorta existe a possibilidade de ocorrência de fluxos turbulentos e, geralmente, associados a situações afastadas do repouso.
Com os dados que se possui é ainda possível através da lei de Poiseuille (equação 32), encontrar a diferença de pressão nos extremos da artéria aorta. Admitindo que o seu comprimento é aproximadamente 40 cm, a diferença de pressão vem dada por:
( )( )
Pa 6.32100.1
4.01048108
842
35
421 =∆⇔×
××××=∆⇒=−
−
−− PP
a
lQPP
ππη
.
Em seguida, é ainda possível utilizar este resultado para, através da equação 30 determinar o perfil da velocidade do sangue na artéria aorta. A velocidade do sangue variará entre o valor zero junto às paredes da artéria e um valor máximo que corresponde ao centro da artéria e que, em termos matemáticos, corresponde a considerar r = 0:
( ) ( ) 1-22
3
221 s m 5.0100.16.32
4.01044
1
4
1=×××
×××=⇒−= −
−vaPP
lv
η.
Este resultado, em conjunto com a Lei de Bernoulli (equação 29), permite concluir que a pressão junto das paredes da artéria é maior do que a pressão no seu centro. É devido a este resultado que, em situações normais, as partículas que se encontram em suspensão no sangue são conduzidas por este, maioritariamente na região central dos vasos, em vez de serem depositadas nas suas paredes (ver Figura 26). Esta tendência, porém, não impede que, com o correr dos anos, as paredes dos vasos se estreitem, devido a depósitos vários, e percam elasticidade, fenómeno ao qual se dá o nome genérico de arteriosclerose. Uma vez formados esses depósitos a sua remoção é muito difícil uma vez que, como observámos, a velocidade do sangue junto às paredes é praticamente zero e, portanto, não tende a arrastá-los.

36
Figura 26 - Esquema do perfil das velocidades do sangue que circula numa artéria, representação das forças a que as partículas constituintes do sangue são sujeitas e da variável r correspondente
à equação 31. (Adapt. de J.B. Marion e W.F. Hornyak, 1985).
Se analisarmos a equação 29, facilmente verificamos que a constrição de um local no interior do vaso, implica um aumento de velocidade nessa região. Quando esse aumento é significativo o fluxo pode tornar-se turbulento o que provoca graves disfunções ao nível da circulação sanguínea. A alteração do diâmetro dos vasos pode, no entanto, ser um importante factor de regulação. De facto, como já se referiu, os vasos sanguíneos, particularmente as arteríolas, não possuem uma forma rígida, sendo as suas paredes revestidas de músculos que contraem ou distendem, modificando, assim, o seu diâmetro e controlando o caudal. Utilizando a equação 32 pode estimar-se qual a alteração de caudal provocada numa arteríola quando o seu diâmetro diminui, por exemplo, de 20%. Seja Q o caudal inicial, Q’ o caudal após o estrangulamento da arteríola e a e a’ os seus raios em cada uma das situações:
( )
a
a
a
a
PPl
a
PPl
a
Q
Q42.04.2
8.0'
8
'
8
''
4
4
4
4
21
4
21
4
=⇔===
−
−=
ηπηπ
conclui-se, então, que apenas com uma pequena diminuição no raio, o caudal se altera para menos de metade. Em situações de funcionamento normal, este mecanismo é, como se observou, extremamente eficiente no sentido de canalizar o sangue para as regiões que mais precisam dele.

37
III MOVIMENTO OSCILATÓRIO E PROPAGAÇÃO DE ONDAS Como se irá observar nas próximas secções, o estudo da forma como as ondas
se propagam, sejam elas mecânicas (aquelas que necessitam de um meio material para se propagarem, como as ondas sonoras) ou electromagnéticas (aquelas que se propagam no vazio) é de extrema importância para a compreensão de diversos fenómenos que ocorrem ao nível do corpo humano. Por este motivo este capítulo será inteiramente dedicado à forma como se descreve primeiramente um movimento oscilatório (movimento que ocorre segundo uma determinada frequência) e em seguida à generalização da propagação deste movimento e à qual se dá o nome de onda.
7. Movimento harmónico simples
O movimento de uma partícula diz-se do tipo harmónico simples, quando é
representado pela expressão:
)cos( φω += tAx
equação 38
São exemplos de movimentos harmónicos simples o movimento executado por uma massa ligada a uma mola ou um pêndulo que oscila sem atrito. Este tipo de movimento pode ser descrito graficamente observando a Figura 27.
Figura 27 – Ilustração das grandezas envolvidas num movimento harmónico simples e sua representação num gráfico de amplitude em função do tempo. (Raymond A. Serway, 4ª edição,
1996).
As grandezas envolvidas neste processo são, essencialmente: amplitude máxima do movimento, A; a fase inicial do movimento, φ e a frequência angular, ω. Ao conjunto (ωt+φ) dá-se o nome de fase do movimento, vem dada em radianos e depende, obviamente, do instante considerado. Ao tempo que demora uma partícula a executar um ciclo completo dá-se o nome de período T. Usando esta última definição e o facto de um ciclo corresponder a 2π é possível deduzir a equação 39, substituindo na expressão x(t) o tempo por t+T
T
πω
2=
equação 39

38
)cos(
)(sen
φωω
φωω
+−==
+−==
tAdt
dva
tAdt
dxv
2
Quanto à frequência é definida como o inverso do período, ou, matematicamente:
Tf
1=
equação 40
Para determinar a velocidade e a aceleração de uma partícula em movimento harmónico simples, seguem-se as regras de derivação que permitem obter a velocidade através da derivada da posição e a aceleração através da derivada da velocidade29:
Tendo em conta as expressões anteriores, as relações de fase entre estas grandezas são dadas pela Figura 28:
Figura 28 – Relações de fase entre a posição a velocidade e a aceleração de uma partícula em movimento harmónico simples. (Raymond A. Serway, 4ª edição, 1996).
8. Propriedades das ondas Se pensarmos que a informação que estimula dois dos nossos sentidos mais
importantes (a visão e a audição) e através das quais reconhecemos o mundo que nos rodeia é transmitida através de ondas, facilmente nos apercebemos da importância do seu estudo na compreensão do modo como se processa a nossa percepção. Na realidade, apesar do som e da luz30 serem fenómenos de natureza muito distinta, é 29 Ver ANEXO B. 30 Deve ter-se presente que embora neste momento se esteja a referir apenas a luz, todo o formalismo que se virá a desenvolver é válido para qualquer onda electromagnética, da qual à luz é apenas um exemplo.
xa
Aa
Av
2
2
ω
ω
ω
−=
=
=
máx
máx

39
possível modelá-los através do formalismo ondulatório, isto é, assumir que ambos se propagam através de uma perturbação do meio31, transportando, desta forma, energia, sem que haja transferência de massa.
8.1 Descrição das ondas Uma das principais características das ondas é o seu carácter periódico, à
semelhança do que acontece com o movimento harmónico simples. Por este motivo, como se observará, a sua descrição é feita através de algumas grandezas comuns a este movimento e que reflectem essa propriedade. Na verdade, uma onda sinosoidal32 não é mais do que um movimento harmónico simples que se propaga pelo espaço. Assim, para além das grandezas já referidas a propósito do movimento harmónico simples como a sua frequência (número de ciclos existentes num segundo), cuja unidade é o hertz (Hz) e o seu período (duração do ciclo), dado em segundos (s) (ver Figura 27), tem-se também a considerar o seu comprimento de onda (c.d.o.) (tamanho espacial do seu ciclo) cuja unidade é o metro (m) e a sua velocidade de propagação (que tem, como se sabe, unidade de m s-1). Estas grandezas relacionam-se através de expressões muito simples, que vale a pena recordar. O comprimento de onda (λ), o período (T) e a velocidade de propagação (v) relacionam-se através da expressão:
vT=λ . equação 41
É ainda de referir duas grandezas, muitas vezes associadas às ondas, às quais se dá o nome de frequência angular (ω) e número de onda (k) e cujas definições matemáticas são dadas pelas expressões:
fπω 2= .
equação 42
λπ2
=k .
equação 43
A frequência angular é dada em radianos por segundo (rad s-1) e contém o mesmo tipo de informação que a frequência, mas em unidades angulares, o mesmo acontecendo com o número de onda em relação ao comprimento de onda, cuja unidades é rad m-1. Por fim, resta complementar o conceito de fase, introduzido anteriormente. Se admitirmos que a um ciclo completo corresponde 2π radianos (que é, aliás, o que está subjacente na equação 42 e na equação 43), a cada instante é possível definir a fase em que o ciclo se encontra, atribuindo a esta um ângulo. Assim, assumindo que inicialmente a onda se encontra no princípio do ciclo, então nesse instante a sua fase é nula; após um quarto do período (T/4), a sua fase é de 90º; em T/2 a fase é de 180º e no final de um período a fase é de 360º, ou, o que é o mesmo, novamente de 0º.
31 No caso das ondas sonoras são as partículas constituintes do próprio meio que são perturbadas. No caso da luz, existe uma perturbação nos campos electromagnéticos na região onde esta se propaga. Por este motivo, enquanto que as primeiras exigem um meio material para se propagarem ondas mecânicas, as segundas propagam-se no vazio. 32 Que são aquelas que se irá estudar.

40
Neste contexto é, certamente, mais compreensível as várias notações que se usam para descrever uma onda caracterizada por uma amplitude A (intensidade da perturbação), uma frequência angular w e uma fase inicial φ . As restantes variáveis têm o significado dado anteriormente:
)( )2
(
)2( )2( )( )(
φφλπ
φπφπφωψ
+=+=
=+=+=+=
kvtsenAct
senA
TtsenAftsenAtsenAt
.
equação 44
8.2 Reflexão, refracção e interferência
Algumas das propriedades mais interessantes das ondas dizem respeito ao seu comportamento quer quando atravessam um meio com diferentes propriedades, quer quando uma ou mais ondas se sobrepõem na mesma região do espaço. Quando uma onda passa de um meio com determinadas características para um outro com características diferentes, observa-se que uma parte da sua energia é reflectida (recuando para o meio de onde provinha) e outra parte segue para o segundo meio, alterando as suas propriedades. Verifica-se ainda que quando as irregularidades da superfície da interface são pequenas relativamente ao comprimento da onda incidente a reflexão ocorre numa direcção específica e diz-se especular. Quando, pelo contrário, as irregularidades da superfície são maiores do que o comprimento da onda, a reflexão diz-se difusa, uma vez que ocorre em todas as direcções. Exemplo de uma reflexão especular é a que podemos observar quando um raio de luz incide num espelho, exemplo de uma reflexão difusa é a de um raio de luz que incide numa folha de papel. Quando uma onda incide numa interface segundo um determinado ângulo, verifica-se que, quando a reflexão é especular, a parte da onda que é reflectida faz com a perpendicular à interface um ângulo de igual valor mas de sentido contrário ao do ângulo da onda incidente (ver Figura 29). Quanto à parte da onda que segue para o segundo meio sofre uma deflexão relativamente ao ângulo de incidência. A este último fenómeno dá-se o nome de refracção, sendo o ângulo da onda refractada dependente das propriedades dos dois meios.
Figura 29 - Representação de uma reflexão especular. Compare-se o ângulo que a onda incidente,
a onda reflectida e a onda refractada fazem com a vertical. (Adapt. de P. Davidovits, 2001).
Na situação em que duas ou mais ondas viajam na mesma região do espaço a perturbação total desse meio é uma soma vectorial da perturbação associada a cada uma delas, podendo o resultado corresponder a uma onda de maior intensidade, de

41
menor intensidade ou mesmo à aniquilação das ondas. A este fenómeno dá-se o nome de interferência (ver Figura 30).
Figura 30 - Exemplo de interferências entre ondas com a mesma frequência e fase: a) interferência construtiva, b) interferência genérica e c) interferência destrutiva. (Adapt. de P.
Davidovits, 2001).
Figura 31 - Exemplo de um sinal constituído por diferentes frequências. O primeiro sinal é o
resultado da soma dos quatro restantes, sendo possível recuperar estes últimos através do uso do formalismo da Transformada de Fourier. (Adapt. de P. Davidovits, 2001).

42
Realce-se que, quando a frequência das ondas somadas não é a mesma, o resultado poderá ser um padrão muito complicado (ver Figura 31) de difícil interpretação33. Ora, repare-se que a grande maioria dos sinais se encontram nestas circunstâncias e, portanto, para o seu estudo recorre-se, muitas vezes, à técnica de processamento de análise em Transformada de Fourier que permite a separação do sinal nas suas diversas componentes cada uma das quais associada a uma frequência, sendo, portanto, possível analisar cada onda em separado, avaliando a percentagem com que cada uma delas contribuiu para o sinal.
8.3 Alguns aspectos das ondas sonoras Como as ondas sonoras se apresentam numa vasta gama de intensidades, é
usual representar a sua amplitude em decibel, que, sendo definido a partir da função logaritmo, torna mais simples a representação de valores afastados de muitas ordens de grandeza:
0
log10I
IdB = ,
equação 45
sendo I0 uma intensidade de referência. A intensidade do som é dependente da pressão máxima no meio (Pmáx) onde se propaga através da relação:
c
PI
ρ2
2máx= ,
equação 46
onde ρ é a densidade do meio e c é a velocidade das ondas nesse mesmo meio. De tal forma que a equação 44 poderá também ser dada por:
0máx
máxlog20P
PdB = ,
equação 47
onde 0máxP é a pressão máxima do meio correspondente à onda de referência.
No que respeita à velocidade do som em diferentes meios, facilmente se verifica que, enquanto nos gases, a velocidade é relativamente baixa, devido ao facto de uma molécula no meio gasoso poder mover-se em distâncias razoáveis sem interferir com moléculas vizinhas; nos sólidos, a velocidade dos ultra-sons é bastante mais elevada, pelo motivo inverso. Nos líquidos, o som possui velocidades intermédias. Ao nível dos tecidos biológicos, exceptuando os pulmões (que apresentam uma elevada percentagem de ar) e os ossos (que têm um comportamento semelhante ao dos sólidos), os restantes tecidos comportam-se, a este respeito, como líquidos. Como já foi referido para o caso geral de qualquer onda, o comportamento do som quando encontra um obstáculo depende do tamanho desse obstáculo quando comparado com o comprimento de onda. Para compreender o que se passa ao nível de uma interface, é importante definir a grandeza impedância acústica:
cZ ρ= , equação 48
33 Este é, aliás, o caso mais comum…

43
onde ρ é a densidade do meio e c a velocidade do som nesse meio. Ao considerar uma onda sonora que incide perpendicularmente numa superfície, a fracção de energia incidente que é reflectida (ou coeficiente de reflexão) é dada por:
2
12
12
+
−=
ZZ
ZZRα ,
equação 49
em que Z1 é a impedância acústica do primeiro meio e Z2 é a impedância acústica do segundo. Do mesmo modo, o coeficiente de transmissão (fracção da energia incidente que é transmitida) é definido como:
( )221
214
ZZ
ZZT
+=α .
equação 50
Das expressões anteriores, conclui-se que quanto maior for a diferença entre as impedâncias acústicas, maior será a fracção de energia reflectida e menor a fracção de energia transmitida. Por exemplo, na interface ar/tecido biológico ou ar/água a maior parte da energia é reflectida.
8.4 Alguns aspectos sobre o efeito de Doppler O efeito de Doppler consiste na alteração da frequência de ondas sonoras quando existe uma velocidade relativa entre a fonte e o receptor das ondas. Considere-se que a fonte de ultra-sons está a mover-se na direcção do receptor com uma velocidade vs. Após um intervalo de tempo t depois da criação de uma determinada frente de onda, a distância entre a frente de onda e a fonte é de (v-vs)t, o que significa que o comprimento de onda do som na direcção do movimento é diminuído para (ver Figura 32):
0f
vv s−=λ ,
equação 51
onde f0 é a frequência do som ao sair da fonte. É fácil verificar que a variação na frequência é, então, dada por:
−=∆
S
S
vv
vff 0 ,
equação 52
que toma a forma:
=∆
v
vff S
0 ,
equação 53
quando se considera a velocidade da fonte muito menor que a velocidade do som no meio.

44
Figura 32 – Esquema explicativo do efeito de Doppler. S representa a fonte das ondas sonoras e d o detector. (Adapt. W.R. Hendee, E.R. Ritenour, 1992).
O mesmo efeito se verifica quando é o detector que se encontra em movimento. Quando a direcção é contrária (em vez de ser no sentido de fonte e detector se aproximarem, é no sentido de se afastarem) a variação da frequência vem negativa o que significa que esta diminui. Um último caso a considerar, é a situação em que o som é reflectido por um objecto em movimento. Nesse caso o objecto funciona como detector quando o feixe o atinge e funciona como fonte quando o feixe é reflectido, de modo que provoca um desvio na frequência que é o dobro dos desvios atrás considerados. No caso mais geral, em que o feixe não tem a direcção do movimento, o desvio causado pelo movimento do objecto reflector móvel é dado por:
ϑcos2 0
=∆
v
vff s ,
equação 54
sendo ϑ o ângulo formado pela direcção do movimento com a propagação do feixe. 8.5 As ondas electromagnéticas e a sua interacção com a matéria
Um outro tipo de ondas de extrema importância são as ondas electromagnéticas, que se distinguem das mecânicas, essencialmente, porque não necessitam de um meio material para se propagarem. Aconselha-se para um melhor acompanhamento deste sub-capítulo a leitura do ANEXO D, onde são explorados alguns conceitos sobre a estrutura da matéria. A radiação electromagnética é caracterizada pela propagação de duas ondas perpendiculares uma à outra (uma das ondas corresponde a um campo eléctrico e a outra corresponde a um campo magnético) que transportam a mesma quantidade de energia e oscilam num plano perpendicular à direcção de propagação. Dada a sua semelhança, para efeitos de alguns estudos, considera-se apenas uma delas, uma vez que conhecendo uma, se conhece perfeitamente a outra (ver Figura 33). O formalismo anteriormente descrito continua a ser válido para estas ondas, sendo, no entanto a sua velocidade de propagação no vácuo uma das mais importantes constantes exibindo o valor 3x108m/s.

45
Figura 33 - Esquema de uma radiação electromagnética. Note-se o facto de cada uma das ondas (eléctrica e magnética) se encontrarem perpendiculares uma à outra e perpendiculares à
velocidade de propagação, que tem a direcção Z.
Neste ponto está-se em condições de introduzir o espectro electromagnético, ou seja, toda a gama de ondas conhecidas que podem ser classificadas como ondas electromagnéticas, organizadas segundo o seu comprimento de onda34. Desde os raios-γ, mais energéticos, até às rádio-frequências de menor energia (ver Figura 34).
Luz visível
Espectro óptico
Raiosgama
RaiosX
Ultravioleta
Luzvisível
Infravermelho
Microondas
Rádio
10-12 m 10-9 m 10-7 m 10-6 m 10-3 m 1 m
Comprimentos de onda
Menos energéticosMais energéticos
Azul Vermelho
Figura 34 - Tabela com as várias radiações electromagnéticas considerando os seus
comprimentos de onda. Neste esquema encontra-se em evidência a região que corresponde ao espectro visível e ao espectro óptico.
Neste contexto, ir-se-á considerar, basicamente, três tipos de interacção dos
campos electromagnéticos com a matéria: o efeito fotoeléctrico, o efeito de Compton e a criação de pares. O efeito fotoeléctrico é aquele em que a energia do fotão incidente é totalmente absorvida pela matéria, sendo utilizada para ionizar determinado elemento. Este efeito dá-se prioritariamente a energias baixas (inferiores a 35 keV35) e é tanto mais frequente quanto maior for o número atómico efectivo da matéria. De facto, a probabilidade de um fotão interactuar com uma dada substância através de efeito fotoeléctrico aceita-se que tem uma dependência entre a terceira e a quarta potência do número atómico efectivo dessa substância. É esta dependência que 34 Repare-se que, tendo em consideração as relações entre as várias grandezas, pode dizer-se que esta organização é estabelecida segundo os comprimentos de onda, ou segundo a frequência, ou segundo a energia (confrontar com a equação 41, a equação 42 e o ANEXO D). 35 1eV = 1.602 x 10-19J

46
é, maioritariamente, responsável pelo contraste existente nas imagens médicas de Raios-X e que é explorada na fabricação de agentes que são injectados nos doentes com o objectivo de aumentar o contraste destas imagem.
Figura 35 – Esquema ilustrativo do efeito fotoelétrico. (Adapt. de:
http://www.oaep.go.th/physics/xrf/xrf02.html, consultado em Outubro de 2006).
Quando a energia dos fotões aumenta, é o efeito de Compton que se torna preponderante, ou seja, os fotões interagem com os electrões livres da matéria36, adquirindo uma frequência diferente da inicial (o que corresponde a uma diminuição de energia). Este efeito pode ser visto como um choque elástico entre duas partículas (entre o fotão e o electrão livre, estando este último inicialmente em repouso), mantendo-se o momento linear e a energia cinética do sistema antes e depois da colisão. Neste caso, note-se que a probabilidade de interacção de um fotão com a matéria não depende directamente do número atómico, mas sim do número de electrões por unidade de massa. Ora como o número de electrões por unidade de massa decresce com o número atómico de uma forma muito lenta, a razão entre o coeficiente de atenuação devida ao efeito de Compton é muito semelhante para todos os materiais, à excepção do hidrogénio.
Figura 36 - Esquema ilustrativo do efeito de Compton. (Adapt. de:
http://www.oaep.go.th/physics/xrf/xrf02.html, consultado em Outubro de 2006).
O terceiro e último processo considerado é a criação de pares electrão/positrão37, o qual só ocorre para energias superiores a 1.022 MeV, uma vez que é esta a soma das energias de um electrão e um positrão livres (E = 2mc2). Por
36 Entende-se por electrões livres aqueles cuja energia de ligação ao átomo é muito menor do que a energia do fotão incidente. 37 O positrão é a anti-partícula do electrão. Ou seja tem exactamente a mesma massa, carga contrária e, quando encontra um electrão. Ambos se aniquilam, surgindo energia em forma de radiação electromagnética.

47
exemplo, para efeitos de imagem com raios-X, este efeito é considerado desprezável, uma vez que a gama de energias utilizadas não abarca valores tão elevados, estando, aproximadamente, no intervalo entre 20 keV e 100 keV.
Figura 37 - Esquema ilustrativo da criação de pares. (adapt. de:
http://www.oaep.go.th/physics/xrf/xrf02.html, consultado em Outubro de 2006).
Quanto à atenuação sofrida por um feixe de radiação electromagnética num determinado meio, esta ocorre graças às interacções consideradas anteriormente, cumprindo-se a expressão:
xI
Id
dµ−= ,
equação 55
onde, I
Id é a fracção de energia perdida por um feixe, quando ultrapassa um material
e dx a espessura desse material. Então, é válida a expressão:
heII µ−= 0 , equação 56
onde, µ é o coeficiente de atenuação do material, h a sua espessura, I0 a intensidade inicial do feixe e I a intensidade do feixe após ter atravessado o material.

48
IV RADIOACTIVIDADE Do mesmo modo que a emissão de radiação-X provém da passagem de estados excitados dos átomos para estados menos energéticos (ver anexo D), a radioactividade deve-se a instabilidades nos núcleos atómicos que correspondem a estados de energia mais elevada (ver Figura 38). Estes estados correspondem a núcleos que sofrem processos de decaimento (ou seja, passam a estados menos energéticos), seguindo a lei:
teNN λ−= 0 , equação 57
onde N é o número de núcleos radioactivos no instante t, N0 é o número de núcleos radioactivos no instante t = 0 e λ é a constante de decaimento, característica de cada núcleo (ver Figura 39). Repare-se na semelhança entre esta e a equação 56 da absorção de radiação electromagnética em materiais (ambas expressas matematicamente através de exponenciais negativas).
Esta lei pode também ser reescrita através da expressão:
teAA λ−= 0 ,
equação 58
sendo A a actividade da fonte radioactiva que é uma medida da taxa de decaimento e, por conseguinte é definida por nº de desintegrações por unidade de tempo, a sua unidade SI é o becquerel (Bq) isto é uma desintegração por segundo. Existem, porém, algumas outras unidades bastante usadas em radioactividade, nomeadamente o curie (Ci), que ainda que seja muito tradicional deve ser evitada, por uma questão de uniformização das unidades ao SI. A conversão de uma unidade para a outra é: 1Ci = 3,7x1010 Bq.
a) b)
Figura 38 – a) Ilustração da relação da razão entre o número de neutrões e o número de protões com a instabilidade dos núcleos. b) Representação da tendência para um determinado tipo de
decaimento tendo em conta essa razão. http://ithacasciencezone.com/chemzone/lessons/11nuclear/nuclear.htm consultado em 4/10/2006.

49
Figura 39 – Ilustração do decaimento radioactivo, λλλλ, tempo de vida media e T tempo de
semi-vida.
Define-se tempo de semi-vida como:
λ/2ln2/1 =T ,
equação 59
sendo o tempo que demora uma amostra de núcleos radioactivos a reduzir-se para metade. E tempo de vida média como o inverso da constante de decaimento introduzida na equação 57:
λτ /1= .
equação 60
9. Produção de radioisótopos
Neste contexto, torna-se oportuno referir as diversas formas de produzir fontes radioactivas. Assim, pode considerar-se quatro mecanismos essenciais:
a) captura de neutrões (ou activação por neutrões) b) fissão nuclear c) bombardeamento com partículas carregadas d) gerador de radionuclidos Todos estes métodos interferem ao nível da estabilidade nuclear, ou seja, ao
nível da razão entre o número de protões e o número de neutrões (ver Figura 38 a)). A captura de neutrões que, como o próprio nome indica, resulta do núcleo receber um neutrão (n) pode envolver a transformação de um isótopo noutro (o elemento mantém-se), com libertação de radiação γ (que será introduzida adiante) ou

50
a transformação de um isótopo de um elemento, num isótopo de outro elemento, com libertação de protões (p) (ver Figura 40). Como exemplos destas duas situações, temos:
γ+→+ MoMo 9998n pn +→+ PS 3232
Figura 40 – Ilustração da produção de fontes radioactivas por captura de neutrões (esferas azuis). As esferas vermelhas são protões.
http://www.windows.ucar.edu/tour/link=/sun/Solar_interior/Nuclear_Reactions/Fusion/Fusion_in_stars/ncapture.html&edu=high, consultado a 4 de Outubro de 2006.
Figura 41 - Ilustração da produção de fontes radioactivas por fissão nuclear. Repare-se na existência de uma reacção em cadeia que, geralmente, este tipo de processo desencadeia.
http://www.oxfordreference.com/pages/VED_samples, consultado a 4 de Outubro de 2006.

51
Figura 42 - Ilustração da produção de fontes radioactivas por bombardeamento de partículas carregadas. http://www.bnl.gov/bnlweb/SNS/workings.html consultado a 4 de Outubro de 2006.
Na fissão nuclear existe também captura de neutrões (uma vez que as amostras são bombardeadas por este tipo de partículas), ficando, em seguida, o núcleo de tal forma instável que ocorre a fissão do núcleo em dois elementos de número atómico menor:
nn 4SnMoUU 13250
9942
23692
23592 ++→→+
Muitos dos isótopos produzidos por fissão são eles próprios instáveis, decaindo, geralmente, por emissão de electrões (ver Figura 41). No bombardeamento com partículas carregadas (protões ou partículas α - núcleos de hélio, formados por 2 neutrões e 2 protões), tem-se alteração do elemento (ver Figura 42). Como exemplo, pode apresentar-se as reacções:
np
np
++→++→+
FO
2GaZn1816
6768
α
Quanto ao gerador de radionuclidos, tem-se um mecanismo de, a partir de um isótopo radioactivo ‘pai’ (fonte), surgir um isótopo radioactivo ‘filho’. O isótopo ‘pai’ tem um tempo de vida superior e está continuamente a decair para o isótopo ‘filho’, que é aquele que apresenta radiação relevante para determinada aplicação. A maioria dos isótopos utilizados em Medicina Nuclear, por exemplo, como o 99Tcm, são obtidos através de geradores de radionuclidos, fundamentalmente, porque, desta forma, se evita a construção de um reactor perto do hospital. Assim, é apenas necessária a existência da fonte e a realização de um procedimento bioquímico que permita a separação do isótopo ‘pai’ do isótopo ‘filho’ e que ligue este último ao radiofármaco.
10. Decaimento radioactivo
Quanto aos vários decaimentos nucleares há a considerar:
• libertação de partículas α (ver Figura 43), ex:
α+→ RnRa 22286
22688

52
As partículas α não têm aplicação em imagens médicas, devido ao seu fraco poder penetrante, mas podem ter interesse clínico ao nível da terapia de lesões superficiais.
Figura 43 – Exemplo de um decaimento alfa.
http://library.thinkquest.org/3471/radiation_types_body.html, consultado a 4 de Outubro de 2006
• radiação β - - libertação de electrões (ver Figura 44), ex:
ν++→ −em9999 TcMo
Neste tipo de radiação é também libertado um neutrino ν que é uma partícula sem massa e sem carga e que interage fracamente com a matéria, cuja existência foi prevista pelos físicos, precisamente para que as leis de conservação se mantivessem válidas em decaimentos como este. Também neste caso, os electrões libertados não são utilizados em diagnóstico médico, devido ao seu fraco poder penetrante, embora apresentem utilidade ao nível terapêutico.
Figura 44 – Exemplo de um decaimento beta menos. http://library.thinkquest.org/3471/radiation_types_body.html - 4 de Outubro de
2006.
• radiação β + - libertação de positrões (ver Figura 45), ex:
ν++→ +eZnGa 6868
neste tipo de radiação há libertação de um anti-neutrino ν . No que toca à aplicação em Medicina, os positrões são úteis em imagens médicas, uma vez que se combinam rapidamente com os electrões do meio, libertando dois raios γ antiparalelos. Estes penetram nos tecidos e são detectados no exterior do organismo, permitindo construir uma imagem de actividade.

53
Figura 45 – Exemplo de um decaimento beta mais. http://library.thinkquest.org/3471/radiation_types_body.html, consultado a 4 de Outubro de
2006.
• captura electrónica - transformação de um protão num neutrão, acompanhada de captura electrónica por parte do núcleo (ver Figura 46), ex:
γ+→+ TeeI 123-123
Neste tipo de radiação há também libertação de raios-X, uma vez que os electrões de camadas mais externas vão ocupar o lugar dos electrões capturados pelo núcleo, habitualmente de camadas mais internas.
Figura 46 - Exemplo de um decaimento por captura electrónica. http://library.thinkquest.org/3471/radiation_types_body.html, consultado a 4 de Outubro de
2006.
• radiação γ - libertação de radiação electromagnética através de rearranjos nucleares de estados de energia mais elevada para estados de energia mais baixa (ver Figura 47). Neste tipo de decaimento não há alteração de elemento ou de isótopo. O estado excitado pode ser prolongado no tempo e, nesse caso, confere-se-lhe a denominação de metaestável. Pode ainda existir conversão interna, que é o mecanismo que ocorre quando a radiação γ ioniza os átomos e, por este motivo, segue-se libertação de raios-X.

54
Figura 47 - Exemplo de um decaimento gama.
http://library.thinkquest.org/3471/radiation_types_body.html, consultado a 4 de Outubro de 2006.
11. Lei do inverso do quadrado
Uma lei válida para qualquer fonte pontual e que governa a intensidade de um feixe com a distância, não considerando a atenuação é a lei conhecida por Lei do Inverso do Quadrado. Esta lei afirma que a intensidade do feixe de radiação decresce com o inverso do quadrado da distância à fonte emissora e decorre da conservação da energia: uma fonte emitindo a energia E, dispersa-a em todas as direcções e a intensidade que atravessa uma superfície à distância r será dada por:
24 d
EI
π= ,
equação 61
portanto, a dependência da intensidade com a distância é inversamente proporcional ao quadrado desta última.

55
V APLICAÇÕES LASERS À MEDICINA
12. Princípios físicos do funcionamento dos lasers Como se sabe, a sigla LASER é composta das iniciais de Light Amplification
by Stimulated Emission of Radiation e que corresponde, como o próprio nome indica, à emissão de luz muito intensa devido à emissão de radiação estimulada.
Como é do conhecimento geral, os modelos atómicos e moleculares actualmente em vigor (ver anexo D), consideram estados quantizados de energia que correspondem a energias bem definidas, sendo os estados de menor energia primeiramente preenchidos. Assim, numa população molecular, a maioria das moléculas encontram-se no estado fundamental, enquanto que apenas uma pequena percentagem se encontra em estados excitados devido à agitação térmica.
De facto, na construção de um laser, é necessário haver uma inversão de população, ou seja, tem que existir um mecanismo que bombeie electrões que se encontram no estado fundamental para um estado excitado, fornecendo-lhes energia. As duas formas de fornecimento de energia são a óptica e através de descargas ou correntes eléctricas (alguns lasers utilizam formas de fornecimento de energia química ou nuclear, mas estes não são utilizados em Medicina).
Como se sabe, a passagem de um nível de energia menor para um nível de energia mais elevada, ocorre através de absorção de energia, enquanto que o contrário ocorre com libertação de energia.
É, no entanto, de referir que existem dois mecanismos de passagem de um nível de energia mais alta para um nível de energia mais baixa: por emissão espontânea (quando o processo ocorre sem interferência exterior) ou por emissão estimulada (quando o processo ocorre devido à passagem de um fotão de energia igual à diferença de energias entre os níveis - ver Figura 48). Este último caso apresenta a particularidade de o fotão libertado possuir exactamente a mesma frequência e fase do fotão responsável pelo estímulo, o que significa que ambos são coerentes e a sua soma amplifica a intensidade da luz. Sabendo que os lasers utilizam este mecanismo de libertação de luz, facilmente se compreende de que forma a luz laser é tão monocromática e pode ser tão intensa.
Figura 48 – Esquema que representa o mecanismo de emissão estimulada; hfin é a energia do fotão que estimula a emissão, enquanto que 2hfout é a energia dos dois fotões resultantes, ou seja,
a soma do que estimula a emissão com o resultante da emissão. (Adapt. de: http://www.jyi.org/volumes/volume3/issue3/images/peterson_laser2.gif consultado em Dezembro
de 2006).

56
O fenómeno da emissão estimulada é tanto mais eficiente quanto mais povoado estiver o nível de energia mais elevado. É por este motivo que nos lasers é criado um mecanismo através do qual existe inversão da população, ou seja, o nível de energia mais elevado fica mais povoado do que o estado fundamental. A forma mais simples de o fazer é fornecer energia às moléculas de modo a colocá-las num nível de energia elevado.
Na verdade, os meios de que os lasers são constituídos podem apresentar vários níveis de energia. Observe-se, por exemplo, os dois sistemas representados na Figura 49. No primeiro existem três níveis de energia: um nível de energia mais baixo (E0), onde a maioria das moléculas se encontram, um nível de energia mais elevado (E2), com um tempo de vida médio curto, e um nível de energia intermédio (E1), com um tempo de vida longo (meta-estável). Fornecendo energia ao meio (usando uma lâmpada forte ou uma descarga eléctrica, quando o meio activo é gasoso) transfere-se as moléculas do estado E0 para o estado E2, estas, rapidamente se transferem para o estado E1, decaindo, por fim, mais lentamente para o estado E0. É nesta última transição que se está interessado. Assim, são os fotões libertados nesta última transição que vão ser responsáveis pela emissão estimulada de outros fotões. No caso do sistema de 4 níveis, temos dois estados intermédios em que o E2 é o estado considerado meta-estável e, por este motivo, é deste para o nível imediatamente abaixo que provêm os fotões que interessam para a luz laser.
Figura 49 – Esquema que representa a existência de estados meta-estáveis responsáveis pela inversão da população, a qual permite a existência de emissão estimulada.
Falta referir um ponto importante que corresponde ao modo como a energia da radiação é escolhida e amplificada (repare-se que no interior do meio existem várias transições e há que escolher aquela que se pretende optimizar). Para tanto, constrói-se uma cavidade de ressonância de modo a atenuar os fotões de energia diferente da pretendida. Ou seja, a cavidade é composta por um cilindro com dois espelhos em cada uma das bases, um deles deverá ser totalmente reflector, enquanto que o outro será apenas semi-transparente para que apenas uma pequena percentagem do feixe saia da cavidade (ver Figura 50). Além disso, o comprimento do cilindro é escolhido de modo a ser um número inteiro de metades de comprimentos de onda, de modo a que a onda reflectida é somada à onda incidente.
Devido à quantidade de vezes que o feixe é reflectido nos espelhos, o laser tem também uma direcção muito bem determinada, uma vez que vai ficando colimado com os espelhos (é como se a fonte original estivesse cada vez mais distante e, portanto, os raios tornam-se cada vez mais paralelos entre si).
E0
E1
E2
E0
E1
E2
E3
Estado meta-estável
Estado meta-estável

57
Figura 50 – Esquema de uma cavidade de ressonância de um laser. Adapt. de:
http://www.acs.ryerson.ca/~kantorek/ELE884/laser.gif consultada em Dezembro de 2006.
A monocromaticidade é garantida, não só porque os fotões são originados a partir de uma transição bem determinada, como também devido à geometria da cavidade (a qual foi já anteriormente descrita). É possível alcançar potências muito elevadas com lasers, uma vez que a luz é extraordinariamente ampliada pela forma como é obtida, mas também porque é possível concentrá-la numa área muito pequena. A título de exemplo pode observar-se que uma radiância de 1W numa área de 10-6m2 e um ângulo sólido de 10-6sr corresponde a uma potência de 1012Wm-2sr-1. Alem disso, os lasers podem operar em modo contínuo ou pulsado. Ou seja, o espelho semi-transparente pode deixar passar a luz apenas em períodos de tempo muito pequenos (na ordem dos ns). Desta forma, a potência do feixe é ainda mais concentrada durante esses pequenos intervalos de tempo.
13. Interacção da luz LASER com os tecidos A radiação electromagnética proveniente dos lasers pode abranger a gama do espectro entre o infra-vermelho e o ultra-violeta, numa gama de frequências de, aproximadamente, 1014 Hz a 1016 Hz. Ora estas radiações, à excepção das de mais alta frequência, possuem energias que não são suficientes para quebrar as ligações químicas das moléculas. De forma que os seus principais efeitos são ao nível do aumento local da temperatura dos tecidos, verificando-se que estes efeitos são extremamente dependentes da forma como essa energia for depositada nos tecidos. Com o objectivo de dispor de grandezas que permitam avaliar estes dois factores: energia depositada e tempo durante o qual essa energia foi transferida, e analogamente ao que acontece em outras áreas, são definidas duas grandezas - a densidade de potência e a fluência. A primeira tem a expressão:
A
PI = ,
equação 62
onde P é a potência do laser (energia emitida por unidade de tempo) e A a área da secção recta do feixe. E a fluência é definida por:

58
EITF = ,
equação 63
onde TE e o tempo de exposição.
Analisando as duas expressões anteriores, pode concluir-se que, para a mesma densidade de potência, quanto menor a fluência, mais rápido será o processo de deposição de energia. Existem, pois, dois efeitos distintos associados a diferentes formas de deposição de energia térmica nos tecidos através de irradiação com luz laser: a fotocoagulação (quando as densidades de potência dos lasers são menores e, portanto, a deposição da mesma quantidade de energia é mais lenta) e a fotovaporização (quando as densidade de potência são maiores). A fotocoagulação é, em certa medida, uma espécie de cozedura. Na verdade, os efeitos sobre os tecidos são muito semelhantes ao que acontece, por exemplo, ao cozermos um naco de carne. O aumento de temperatura irá conduzir à desnaturação das proteínas, ou seja, à perda da sua estrutura terciária, tornando-as disfuncionais. Em termos de aspecto físico, e apelando à nossa experiência quotidiana, sabemos, por exemplo que a carne vermelha cozida, perde a sua cor tornando-se castanho acinzentada. Este fenómeno deve-se, precisamente, à desnaturação da hemoglobina e da mioglobina (proteínas que são responsáveis pelo transporte do sangue nos vasos sanguíneos e nos músculos, respectivamente, e que conferem ao sangue a cor vermelha). Sabemos ainda que a carne depois de cozinhada se torna mais fácil de rasgar, devido à desnaturação do colagénio, proteína de estrutura constituinte de grande parte dos tecidos orgânicos. E, por fim, já todos tivemos a infeliz decepção de preparar uma refeição para várias pessoas e o naco de carne que cozinhámos, ter diminuído visivelmente, o seu volume. O que corresponde, precisamente, à evaporação (ainda que lenta) de uma parte significativa da água que o constituía. Tendo em conta estas considerações, é fácil compreender que a fotocoagulação pode ser utilizada para destruir tecidos, infligindo-lhes desnaturação das proteínas que os constituem. Embora se vá discutir adiante várias aplicações médicas, pode desde já adiantar-se que a fotocoagulação é utilizada, essencialmente, na destruição de tumores, em tratamentos da retina e como forma de evitar hemorragias (os vasos sanguíneos fotocoagulados são como que ‘selados’ e evitam a perda de sangue). Apesar de a fotocoagulação envolver a deposição lenta de energia térmica nos tecidos, deve ter-se presente que esse processo não pode demorar demasiado tempo, caso contrário, corre-se o risco de o calor se transferir para os tecidos em redor e, por um lado, não ser eficiente relativamente aos efeitos pretendidos na região de acção, por outro, ir lesar tecidos adjacentes sobre os quais não se desejava agir. A este respeito, é pertinente introduzir-se um outro conceito que é o de tempo de relaxação térmico. É representado por TR e é o tempo necessário para que o calor depositado numa determinada região seja conduzido para fora dessa região, de forma a que a temperatura aumentada no tecido exposto diminua para metade. Com base nesta definição, compreende-se que para que a acção do laser seja eficiente deve cumprir-se a condição: Te<<TR. Além disso, observou-se que as densidades de potência associadas ao efeito de fotocoagulação estão na gama entre 10 W/cm2 e 100 W/cm2, de modo que os lasers utilizados nestas aplicações possuem estas características. Quando as densidades de potência dos lasers são superiores a 100 W/cm2 o efeito mais evidente é o de fotovaporização, ou seja, a temperatura de ebulição da

59
água é rapidamente atingida e os tecidos são cortados. Por este motivo, estes lasers têm aplicações essencialmente ao nível cirúrgico, podendo funcionar como bisturi, ou como uma forma de remover tecidos extremamente precisa. Esta aplicação tem ainda a vantagem adicional de os tecidos adjacentes ao corte sofrerem fotocoagulação, evitando, desta forma, o surgimento de hemorragias. Ainda no domínio dos lasers com densidades de potência elevadas, há a considerar aqueles cuja gama de frequências se situa no ultravioleta e cujas energias já interfer ao nível das ligações químicas. Neste caso, a transferência de energia não implica aumento da temperatura, sendo o corte dos tecidos devido à quebra das ligações químicas. A este fenómeno dá-se o nome de fotoablação.
A discussão sobre a forma de interacção da luz com os tecidos só fica completa referindo o facto de a absorção da luz pelos tecidos ser selectiva. Ou seja, como se sabe, algumas substâncias absorvem especificamente num dado c.d.o., podendo essa especificidade ser utilizada em diferentes cenários.
Antes de mais, relembremo-nos que o espectro de absorção das moléculas é muito mais complexo do que o dos átomos, parecendo contínuos. O que significa que, embora absorvam preferencialmente em determinadas frequências o seu espectro não apresenta picos bem definidos como no caso dos átomos (ver anexo D). No que respeita à constituição dos tecidos, pode dizer-se que estes são formados por cerca de 70% de água e 30% de moléculas biológicas. Enquanto que a primeira é transparente na gama do visível, mas absorve no infravermelho e no ultravioleta, as segundas absorvem em diversas frequências na gama do espectro electromagnético que nos interessa, desde o infravermelho (IV) ao ultravioleta (UV). Embora as proteínas absorvam, preferencialmente, no UV, há excepções como a hemoglobina, que absorve na gama entre, aproximadamente, 510 nm e 600 nm. Chame-se, porém, a atenção para o facto de a oxihemoglobina e a deoxihemoglobina absorverem em c.d.o. diferentes: a primeira absorve mais na gama do azul e menos do vermelho do que a segunda (ver Figura 51), embora ambas reflictam prioritariamente na região do vermelho. Daí, apesar do sangue ser sempre vermelho, se associar à oxihemoglobina a cor vermelha e à desoxihemoglobina a cor azul.
Figura 51 – Representação dos espectros de absorção da oxihemoglobina e da
desoxihemoblobina. (Adapt. de: Susanne Amador Kane, Introduction to Physics in Modern Medicine, 2003, Taylor & Francis).
É claro que, tendo em conta a selectividade da absorção, o comprimento de onda em que os lasers emitem, a par da sua potência, vai condicionar as suas aplicações. O laser de Nd:YAG, por exemplo, emite no infravermelho (1064 nm), e é,

60
fundamentalmente, utilizado em fotovaporização. Embora não seja absorvido especificamente, pela água, pelo sangue ou pelos tecidos moles é muito potente, permitindo essa aplicação. Já o laser de dióxido de carbono emite no infravermelho (10600 nm) e, uma vez que é absorvido pela água, é utilizado em situações gerais em que não existam pigmentos coloridos. Existe ainda o laser de Er:YAG que emite no infravermelho (1540 nm) e que pode ter aplicações semelhantes às do de dióxido de carbono, com a vantagem de, uma vez que possui um c.d.o. menor, poder ser focalizado em áreas muito pequenas, o que aumenta a sua densidade de potência e, portanto, permite que seja utilizado em odontologia e nos tecidos ósseos. Os lasers de árgon são selectivamente absorvidos pela hemoglobina, sendo, por isso, utilizados em cirurgia geral. Além disso, existem lasers, como o de kripton vermelho e o de árgon que são absorvidos selectivamente em diferentes regiões da retina, o que pode ser utilizado para diferentes aplicações associadas à oftalmologia.
14. Aplicação dos lasers a diferentes áreas médicas (facultativo)
Como já se introduziu na secção anterior, as aplicações dos lasers na Medicina são imensas. A cirurgia em geral, a dermatologia, a oftalmologia e a oncologia, são algumas das áreas em que a popularidade dos lasers tem aumentado todos os anos. Em dermatologia, por exemplo, contam-se, por exemplo, as seguintes aplicações: 1) Remoção de cancros da pele. O laser de dióxido de carbono é muito utilizado para este efeito, actuando ao nível da remoção dos tecidos. 2) Na cirurgia estética. O mesmo tipo de laser pode ser utilizado para retirar camadas de pele muito finas, permitindo o rejuvenescimento de tecidos que tenham sido, por exemplo, queimados do sol. 3) Na cosmética. O laser de Er: YAG, por exemplo, é muito utilizado em depilação dita definitiva. 4) Ainda em cosmética, os lasers podem ser utilizados para remoção de manchas pigmentadas. Os lasers de corantes com c.d.o. no amarelo têm sido utilizados para destruir os vasos sanguíneos responsáveis pelas manchas tipo vinho do porto. E o laser de Nd:YAG e de rubi são utilizados na remoção de tatuagens. A este respeito é de referir que quando a cor das tatuagens coincide com a da hemoglobina e da melanina o tratamento é mais difícil, uma vez que implica também a destruição de tecidos saudáveis e sem tatuagem…
Também em oftalmologia a utilização dos lasers é muito vulgar. Aliás, note-se que o simples facto de a lente e o cristalino serem transparentes à luz visível permite o fácil acesso destas radiações a áreas como a retina que, de outra forma só poderem ser acedidas por métodos invasivos. Podem enumerar-se as seguintes aplicações a esta área: 1) No tratamento do glaucoma, cuja origem é o aumento excessivo da pressão ocular, são realizados pequenos orifícios, com o laser de árgon, que facilitam a drenagem do humor aquoso. 2) No tratamento de diversas lesões que tenham causado lenhos ou orifícios ao nível da retina, os lasers são utilizados para fotocoagular a região em volta, de forma a evitar o seu crescimento. 3) Na retinopatia diabética, onde é formada uma rede de vasos sanguíneos que dificultam a visão, os lasers de árgon são utilizados para realizar pequenas queimaduras nas regiões à volta dos vasos sanguíneos, prevenindo a formação de novos (ver Figura 52). 4) Em doentes com cataratas, ou seja, em quem ocorre opacidade da lente. Nestas situações, a lente é destruída através de ultrassons e colocada uma nova lente de material plástico. Porém, em alguns casos as cataratas desenvolvem-se novamente e, nessa altura, podem ser removidas através da aplicação da luz laser. 5) Na correcção da miopia, tem sido muito usual a utilização de lasers de excímeros para realizar cortes que permitem corrigir o raio de curvatura da córnea.

61
Figura 52 – Fotografia da retina a) logo após tratamento contra a retinopatia diabética com
fotocoagulação e b) algum tempo depois. Em ambas as imagens são visíveis as lesões causadas pelo tratamento e que evitam o crescimento dos vasos sanguíneos, os quais são responsáveis pela perda de visão nestes doentes. (Retirado de: Susanne Amador Kane, Introduction to Physics in
Modern Medicine, 2003, Taylor & Francis).
Os lasers têm também sido aplicados com sucesso em odontologia. Neste âmbito, contam-se 1) a remoção de tumores e de tecidos em excesso e 2) a remoção de placa bacteriana.
Uma última aplicação que nos parece digna de nota é a de remoção de tumores, não através de cirurgia, mas utilizando-se a técnica de terapia fotodinâmica. Nesta técnica, o indivíduo é injectado com uma substância com afinidade às células cancerosas. Essa substância é formada por moléculas fotosensíveis que, uma vez expostas a luz com determinado c.d.o. sofrem alterações tais, que destroem as células a que estão ligadas. Este processo de destruição de células cancerosas é, quanto a nós, muito interessante, sendo necessário ter-se em atenção que o indivíduo deve permanecer às escuras até a substância injectada ter-se fixado na região do tumor, caso contrário, corre-se o risco de serem destruídas células sãs.

62
VI ALGUNS ELEMENTOS DE ELECTROMAGNETISMO E APLICAÇÕES AOS SISTEMAS BIOLÓGICOS Sendo a electricidade um fenómeno extremamente eficiente quer no transporte de informação, quer na sua sincronização, não é de admirar que os sistemas biológicos a utilizem nas mais sofisticadas e delicadas funções do corpo humano. Na verdade, qualquer que seja a situação em que exista transporte iónico, os fenómenos eléctricos marcam uma indelével presença, revelando-se de particular interesse no processamento dos sinais nervosos e na actividade muscular. Para a compreensão deste capítulo, os alunos deverão conhecer conceitos como os de força eléctrica, campo eléctrico e diferença de potencial eléctrico. Analogamente, ao que foi feito em capítulos anteriores também neste caso existe um ANEXO E, onde estes conceitos são revistos. Tendo em conta que no que respeita ao campo magnético os alunos apresentam, em geral, maiores lacunas, no início deste capítulo serão feitas, no sub-capítulo 9, algumas considerações relativas a esta matéria.
15. Introdução ao campo magnético A par da descoberta da existência de cargas, encontrou-se também materiais com propriedades interessantes – os ímanes – que exerciam forças de atracção ou de repulsão entre eles. Porém, só muito mais tarde, no início da segunda metade do século XIX, Maxwell (1831-1879) veio a estabelecer uma relação entre os aspectos eléctricos e os magnéticos, reunindo ambos numa das grandes áreas da Física à qual se dá o nome de Electromagnetismo. Assim, de uma forma análoga ao que se fez com a força eléctrica e o campo eléctrico, também se pode definir uma força magnética e um campo magnético, cuja unidade é o tesla (T). Podendo estes últimos serem gerados pela presença de ímanes ou de cargas eléctricas em movimento. Também no caso do campo magnético a sua presença é comprovada através do uso de um objecto de prova. Neste caso, ou de um íman, ou de uma partícula carregada animada de velocidade. Assim, sempre que se coloca uma partícula carregada com uma determinada
velocidade, vr
, no interior de um campo magnético, Br
, esta fica sujeita a uma força
magnética, magFr
, com as seguintes características: a) a sua amplitude é proporcional à
carga, q, à sua velocidade, v , e à amplitude do campo magnético, Br
; b) se a
velocidade da partícula for paralela à direcção do campo, a força é nula, c) a força é perpendicular ao plano formado pela velocidade da partícula e pelo campo magnético, d) o sentido da força sobre uma carga positiva é o oposto ao que fica sujeita uma carga negativa, e) A amplitude da força é proporcional ao seno do ângulo formado pela velocidade e pelo campo magnético. Ora estas observações conduzem à equação 64 (para compreender as relações entre as direcções dos vectores envolvidos veja-se a Figura 53):
BvqFmag
rrr×=
equação 64

63
Figura 53 – Relação entre os vectores campo magnético, velocidade da carga e força a que esta
fica sujeita. (Raymond A. Serway, 4ª edição, 1996).
Com o intuito de se realizar um paralelismo entre as características da força eléctrica e a força magnética, chame-se a atenção para as seguintes considerações: a) a força eléctrica é paralela ao campo eléctrico, enquanto que a força magnética é perpendicular ao campo magnético; b) a força eléctrica actua sobre cargas em repouso, a força magnética actua sobre cargas em movimento; c) a força eléctrica realiza trabalho ao deslocar uma partícula, a força magnética não (desde que o campo seja estacionário). Tendo em conta a equação 64, é possível encontrar a força magnética criada em diversas circunstâncias, nomeadamente, em situações em que se considera uma corrente (não esquecer que uma corrente eléctrica é um conjunto de cargas em movimento). Se a corrente constante, I, percorrer um fio rectilíneo, representado pelo
vector, Lr
, no interior de um campo magnético Br
, obtém-se uma força magnética dada por:
BLIFmag
rrr×=
equação 65
Até agora, tem-se discutido a que força é que uma carga em movimento (ou uma corrente) fica sujeita, quando está no seio de um campo magnético, ir-se-á agora abordar em que condições se cria um campo magnético. À lei que rege precisamente a criação de um campo magnético devido à presença de cargas em movimento dá-se o nome de Lei de Biot-Savart, também ela estabelecida com base numa série de observações experimentais que levaram a concluir que o campo magnético Bd
r criado
num ponto P devido à passagem de uma corrente I no elemento sdr
de um fio
condutor, cumpre: a) Bdr
é perpendicular a sdr
e a rr
, sendo rr
o vector posição do

64
ponto P; b) Bdr
é inversamente proporcional a 2r ; c) Bdr
é proporcional à corrente I
e ao elemento de comprimento ds e d) Bdr
é proporcional ao sen θ, sendo θ o ângulo
formado por sdr
e rr
. Com base nestas observações, foi fácil concluir que esta lei se traduzia matematicamente pela expressão:
2
r
usdIkBd r
m
rrr ×= ,
equação 66
sendo 1-70 A m T104
−==πµ
mk , com 0µ - permeabilidade do vácuo cujo valor é:
-1-7 A m T 104 ×π Uma aplicação importante e bastante simples desta expressão é o cálculo do
campo criado por um condutor linear rectilíneo e infinito, cuja expressão é dada por:
R
IB
πµ2
0=r
.
equação 67
Sem pretender entrar em grandes detalhes relativamente ao formalismo associado ao electromagnetismo é importante realçar um dos seus aspectos mais interessantes. Na verdade, em electromagnetismo existe uma dualidade bastante interessante que se traduz no facto de, por um lado cargas em movimento (correntes eléctricas) gerarem campos magnéticos, por outro, campos magnéticos não estacionários gerarem correntes eléctricas. Estas duas observações são governadas, respectivamente, pela Lei de Ampère e pelas Leis de Faraday e Lenz. Como já se referiu anteriormente, não se irá fazer uma abordagem demasiadamente formal a estas leis pretendendo-se tão-somente reconhecê-las em situações bastante simples. No que respeita à Lei de Ampère, esta pode ser simplificada afirmando-se apenas que uma corrente eléctrica que percorre um circuito fechado gera uma campo magnético em seu redor. Um exemplo típico que se pode explorar com esta lei é o campo magnético criado por um solenóide (repare-se que um solenóide é um conjunto de N espiras – circuitos fechados - que podem ser percorridas por uma corrente eléctrica, I). Nestas condições, prova-se que, com base na já referida Lei de Ampère e se o solenóide tiver um comprimento, l, suficientemente longo, num ponto exterior ao solenóide o campo magnético se pode considerar nulo, por outro lado, num ponto interior, o campo magnético vem dado através da expressão (ver Figura 54):
l
NIB 0µ= .
equação 68

65
Figura 54 – Representação das linhas de campo magnético criadas por um solenóide real.
Compreende-se com base neste esquema que num solenóide infinito, num ponto exterior ao solenóide e suficientemente afastado o campo possa ser considerado nulo e que num ponto
interior este seja contante. (Raymond A. Serway, 4ª edição, 1996).
Uma introdução prática à Leis de Faraday é possível ser feita utilizando um íman e uma espira ligada a um amperímetro (ver Figura 55). Como é comummente aceite, um íman gera um campo magnético. Ora, ao mover-se um íman, está, precisamente, a alterar-se esse campo magnético no meio em seu redor. Se esse movimento for feito nas proximidades de uma espira verifica-se que se induz uma corrente na espira que tem um sinal caso o íman se mova num sentido e o sinal contrário se o íman se mover em sentido contrário. Como uma outra forma de gerar um campo magnético é através de uma corrente eléctrica pode concluir-se que uma corrente oscilatória nas proximidades de uma espira, vai, também ela provocar uma corrente nessa espira, provocando uma diferença de potencial aos seus terminais. A este fenómeno dá-se o nome de Indução Magnética e pode ser explicado de uma forma bastante simples: repare-se que se um condutor, no interior do qual não circulam cargas se deslocar relativamente a um campo magnético, as suas cargas vão sofrer uma força que as impelirá a mover-se, ou seja, criar-se-á uma corrente induzida.
Figura 55 – Representação da Lei de Faraday. (Raymond A. Serway, 4ª edição, 1996).

66
Embora não se tenha definido formalmente fluxo de campo magnético, lembrando a definição de linhas de campo eléctrico e transferindo-a para o campo magnético como sendo também uma representação possível do mesmo. Facilmente se compreende que o fluxo magnético através de uma linha fechada será determinado pelo número de linhas de campo magnético que atravessa essa linha. Com base nesta definição é possível enunciar a Lei de Faraday da seguinte forma: “A diferença de
potencial gerada por indução aos terminais de um circuito, iguala em valor absoluto,
a taxa de variação do fluxo de campo magnético através da superfície delimitada pelo
circuito em causa”. Quanto à Lei de Lenz diz-nos apenas que essa diferença de potencial se opõe à causa que lhe deu origem. Ou, dito de uma outra forma, a corrente induzida vai, por sua vez, gerar um campo magnético que se opõe à variação do campo magnético responsável pela sua existência.
16. Revisão de alguns conceitos sobre os principais elementos dos circuitos eléctricos (facultativo)
A intensidade de corrente que flui entre dois pontos num determinado material é proporcional à diferença de potencial entre esses dois pontos e dependente das propriedades desse material. Neste contexto, os materiais podem apresentar essencialmente três comportamentos38: resistivo, capacitivo e indutivo. A resistência, R, de um material mede a oposição que este faz à passagem da corrente eléctrica, tem como unidade SI o ohm (Ω) e define-se como a constante de proporcionalidade entre a diferença de potencial, V, e a corrente eléctrica, I:
RIV = . equação 69
À equação 69 dá-se o nome de Lei de Ohm e, conjuntamente com as suas generalizações e com a Lei da Conservação da Carga, encerra, certamente, a essência de todas as aplicações da electricidade e dos circuitos eléctricos39. As componentes eléctricas podem associar-se basicamente de duas formas: em série ou em paralelo (ver Figura 56). Prova-se que o resultado RT da associação de duas resistências, R1 e R2, em série, é simplesmente a soma dessas duas resistências:
21 RRRT += .
equação 70
Enquanto que o resultado da associação de duas resistências em paralelo cumpre:
21
111
RRRT
+= .
equação 71
38 Na realidade, cada material exibe, numa certa medida, os três comportamentos, no entanto, em geral, um deles é predominante. 39 Para a maioria dos autores, toda a teoria da electricidade se encontra resumida na expressão mais geral da Lei de Ohm, na Lei das Malhas e na Lei dos Nós, sendo estas duas últimas consequências directas da lei de conservação da carga.

67
Figura 56 - Esquemas de a) um circuito formado por duas resistências em série b) de um circuito
formado por duas resistências em paralelo.
Sempre que uma corrente eléctrica atravessa um material resistivo, uma parte da sua energia é transformada em calor. A potência dissipada por esta via depende linearmente da resistência do material, R, e quadraticamente da corrente que o atravessa, cumprindo-se a relação:
2RIP = . equação 72
Um condensador é um outro componente eléctrico cuja principal característica é armazenar cargas eléctricas. O condensador mais simples é formado por duas placas condutoras entre as quais se encontra um material isolante (ver Figura 57). Verifica-se que, quando se estabelece uma diferença de potencial entre os condutores, V, existe uma acumulação de cargas em cada uma das placas (positivas numa delas e negativas na outra). Se Q for a quantidade de carga acumulada em cada uma das placas, cumpre-se a relação:
CVQ = , equação 73
onde a constante de proporcionalidade C é a capacidade do condensador, cuja unidade é o faraday (F).
Figura 57 - Esquema de um condensador de placas.
No que respeita à associação de condensadores, verifica-se que a capacidade resultante, CT, de dois condensadores C1 e C2 dispostos em série, cumpre a relação:
21
111
CCCT
+= .
equação 74
+ −
R1
R2
a)
R1 R2
b)

68
Enquanto que a capacidade associada a dois condensadores dispostos em paralelo é igual à soma das capacidades de cada um deles. A energia armazenada num condensador é, como seria de esperar, função da sua capacidade e da diferença de potencial entre os condutores:
2
2
1CVE = .
equação 75
O indutor, por sua vez, é um componente que se opõe a mudanças na intensidade de corrente, de modo que a indutância, L, que mede essa oposição, é definida através da relação:
t
ILV∆∆
= .
equação 76
Onde V é a diferença de potencial nos terminais do indutor e a razão t
I
∆∆
mede a
variação da corrente num intervalo de tempo t∆ . A unidade SI da indutância é o henry (H) e a associação de indutores segue as mesmas regras que a associação de resistências.
17. Equipamentos, sistemas de medida e de controlo É possível reduzir qualquer sistema de medida a um pequeno conjunto de
operações que poderão ser mais ou menos complexas. Desta forma, sempre que se pretender aceder à medida de uma grandeza, quer directamente através dos nossos sentidos, quer utilizando equipamentos adequados, podemos distinguir cinco passos (ver Figura 58): No primeiro, com o recurso a um sensor apropriado, transforma-se a grandeza a que se pretende aceder num sinal analisável (tipicamente um sinal eléctrico). No segundo passo, esse sinal é amplificado, uma vez que, em particular nos fenómenos biológicos, a ordem de grandeza do sinal medido é, em geral, tão baixa que se torna difícil de processar. Em seguida, ou se observa directamente o sinal ou se processa o sinal e posteriormente se o observa. Por fim, o sinal poderá ser guardado de modo a poder ser novamente analisado ou posteriores processamentos.
Figura 58 - Esquema dos blocos existentes num sistema de medição.
Medição do parâmetro a observar
Amplificação
Visualização
Processamento do sinal
Armazenamento

69
Para ilustrar a aplicação deste esquema a duas situações considere-se: 1) a percepção de uma imagem através dos nossos olhos e 2) a medição dos ultra-sons emitidos pelos morcegos.
No primeiro caso os fotões de luz que formam a imagem que os nossos olhos vêm são registados pelos sensores (cones e bastonetes) existentes na retina, especializados em transformar luz em sinais eléctricos. Esses sinais são transferidos e processados pelos neurónios, formando-se uma imagem que é reconhecida pelo cérebro e que é o resultado da actividade de determinados neurónios. Por fim, essa imagem poderá ser colocada na memória através de mecanismos ainda não totalmente conhecidos.
No caso de estarmos interessados no registo dos ultra-sons emitidos pelos morcegos, é necessário utilizar um sensor adequado, que nesse caso, poderá ser um cristal piezo-eléctrico que transforma os ultra-sons em sinais eléctricos. Estes sinais são amplificados e podem ser visualizados num osciloscópio. Geralmente, antes de serem observados, estes sinais sofrem um processo de filtragem (processamento) com o objectivo de os libertar de ruído (frequências indesejadas). Finalmente, o sinal poderá ser gravado no disco rígido de um computador, num CD ou qualquer outro suporte.
Associados aos sistemas de medida estão, muitas vezes, mecanismos de controlo. Neste caso os circuitos apresentam uma maior complexidade, uma vez que existe um parâmetro que é controlado com base no valor medido40. Na Figura 59 encontra-se um esquema geral dos sistemas de controlo: Existe um parâmetro que é monitorizado e um valor de referência que pode ou não ser também ele medido. Ambos são transmitidos a um dispositivo de comparação que actua sobre o parâmetro que se pretende controlar através de diferentes acções.
Figura 59 - Esquema dos blocos existentes num sistema de controlo.
Retome-se o primeiro exemplo. Como se sabe, o sistema nervoso tem capacidade para avaliar a quantidade de luz que está a chegar à retina e decidir qual a abertura adequada da pupila. Neste exemplo a referência é um patamar previamente estabelecido e o parâmetro controlado é diferente daquele que é medido.
40 O parâmetro a controlar tanto pode ser aquele que é directamente medido, como outro que lhe esteja associado.
Medição do parâmetro
Valor de referência
Comparação
Alteração do parâmetro a medir
Factor do qual o parâmetro a medir depende
Alteração de um outro parâmetro

70
Imagine-se uma outra situação em que se pretende manter uma sala a uma dada temperatura que depende da humidade relativa da mesma. Neste caso, é medida a temperatura da sala (que coincide com o parâmetro a controlar) e simultaneamente a sua humidade relativa, estabelece-se a referência desejada e decide-se se os dispositivos de aquecimento ou arrefecimento devem ou não ser ligados.
18. O electrocardiógrafo O electrocardiograma (ECG) é um exame amplamente utilizado em clínica
que consiste na medição de potenciais que se estabelecem ao nível da pele resultantes da actividade eléctrica cardíaca. As diferenças de potencial relacionadas com a contracção cardíaca são responsáveis por correntes eléctricas que flúem através dos tecidos biológicos, provocando diferenças de potencial em regiões afastadas do coração, nomeadamente, à superfície da pele. O sinal é medido através de eléctrodos que são colocados em diversos pontos do corpo, resultando o sinal da diferença entre dois desses pontos (ver Figura 60).
Existem três derivações principais no ECG41 dependentes dos pontos considerados: I) o sinal é medido entre o pulso esquerdo e o pulso direito; II) o sinal é medido entre a perna esquerda e o pulso esquerdo e III) o sinal é medido entre a perna esquerda e o pulso direito. Em qualquer delas é possível distinguir, para cada contracção cardíaca, três sinais (ver Figura 61): A onda P, associada à actividade eléctrica que resulta na contracção das aurículas. O complexo QRS, que corresponde à contracção dos ventrículos. E a onda T, que está associada à descontracção dos ventrículos. O sinal respeitante à descontracção das aurículas, para além de pouco amplo e, portanto, de difícil detecção, aparece, em termos temporais, sobreposto ao complexo QRS, não sendo possível distingui-lo deste.
Figura 60 - Esquema de um electrocardiógrafo. (Adapt. de P. Davidovits, 2001).
Figura 61 - Sinal típico de electrocardiografia. (Adapt. de P. Davidovits, 2001).
41 Estas derivações correspondem à situação em que o sinal de ECG é recolhido nos pulsos e nos tornozelos. Existem outras derivações, nomeadamente aquelas que implicam colocação de eléctrodos na região do tórax, mas às quais não nos iremos referir.

71
Os sinais medidos são na ordem dos milivolt (mV), de modo que, embora sejam filtrados com o objectivo de os libertar de frequências indesejáveis, são, geralmente, muito fáceis de medir. De qualquer forma, é necessário utilizar um gel electrolítico que garanta um bom contacto eléctrico entre os eléctrodos e a pele e o sinal será medido com melhor qualidade quando a pele se encontra limpa.
Embora actualmente sejam já correntemente usados equipamentos de ECG digitais42, na prática clínica continuam a ser amplamente utilizados os aparelhos com registo em papel. Apesar destes últimos não possibilitarem uma avaliação quantitativa do sinal rigorosa, geralmente, para um clínico experiente, a sua análise visual estudo das amplitudes relativas dos picos, a sua relação temporal e morfologia das ondas é suficiente para detectar anomalias ao nível do funcionamento cardíaco.
19. O electroencefalógrafo O electroencefalograma (EEG) tem um princípio muito semelhante ao do
ECG, mas mede a actividade eléctrica cerebral. Em termos gerais estabelecem-se dois tipos de exame: os registos espontâneos, onde as diferenças de potencial são medidas continuamente e sem a presença de estímulos exteriores, e os registos evocados que são os potenciais associados à resposta cerebral a um estímulo que pode ser visual, auditivo ou sensorial.
19.1 Registos electroencefalográficos
Os primeiros registos de EEG são datados de 1928 e, logo após as primeiras medições da actividade cerebral não-invasivamente, tornou-se claro que as características do traçado eram fortemente dependentes do estado de repouso do indivíduo. De facto, uma parte significativa do registo de EEG espontâneo é extremamente irregular, tornando-se difícil a sua caracterização. Porém, quer por simples inspecção visual, quer através do recurso a técnicas de Transformadas de Fourier que permitem o cálculo dos espectros de potência dos registos, facilmente se verifica que existem frequências dominantes correspondentes a diferentes estados de vigília (na Figura 62 encontram-se esquematizados exemplos de diversos traçados espontâneos). Além disso, é possível detectar diversas patologias através da análise do EEG, uma vez que se podem observar quer notórias alterações nos padrões de frequências considerados normais, quer a existência de grafo-elementos específicos da doença.
Quanto aos potenciais evocados há a referir que quando um sujeito é estimulado visual, auditiva ou sensorialmente desencadeia-se, nos hemisférios cerebrais, um processo complexo de recolha, transmissão e processamento de informação que corresponde às diversas etapas da percepção. Após o estímulo, existem, pois, neurónios, ou grupos de neurónios, que se encontram activos em simultâneo ou sequencialmente dando origem a potenciais eléctricos passíveis de ser medidos ao nível do escalpe. Refira-se, porém, que as amplitudes dos potenciais correspondentes ao estímulo (potenciais ou respostas evocadas), quando comparadas com as dos potenciais espontâneos constantemente presentes no registo electroencefalográfico, são várias vezes menores (os registos espontâneos têm tipicamente, uma amplitude de 10-30µV, enquanto os potenciais evocados têm uma amplitude mínima de 0.5µV). Por este motivo, com o intuito de tornar visível os potenciais evocados (PE), é usual repetir os estímulos (habitualmente entre 50 e 200 vezes, dependendo do tipo de estímulo e da relação sinal/ruído que se pretender) e ir
42 No capítulo referente ao EEG serão feitos alguns comentários sobre as características dos sinais registados com equipamentos digitais que são igualmente válidos para os equipamentos de ECG.

72
somando os registos dos potenciais referentes aos instantes subsequentes. Partindo do princípio que os potenciais espontâneos são independentes do estímulo, este procedimento permite fazer emergir os PE do ruído provocado pelos potenciais espontâneos (ver Figura 63).
Figura 62 - Exemplos de diversos traçados de EEG espontâneo. Os fusos são sinais que aparecem
no início do sono, as ondas delta são típicas dos instantes de sono mais profundo, o ritmo beta aparece tanto durante a fase de sono REM (Rapid Eyes Movements), como durante a vigília
quando o indivíduo se encontra com a sua atenção focalizada e o ritmo beta aparece em repouso. (Adapt. Guyton e Hall, 1996).
Figura 63 - Efeito da soma de potenciais evocados visuais. (Adapt. Le Cerveau, 1984).

73
Os PE referentes a um determinado estímulo podem apresentar diversos picos de amplitude aos quais se dá o nome de componentes (ver Figura 64). Cada uma destas componentes está relacionada com uma ou mais etapas de processamento de informação e é caracterizada pela sua latência (intervalo de tempo entre o estímulo e a componente). Actualmente, existem diversos estudos onde são comparadas as latências das diferentes componentes dos PE relativos a indivíduos saudáveis e a doentes, verificando-se, em muitos casos, desvios significativos. Assim, a medição de PE em doentes com distúrbios neurológicos é cada vez mais uma prática corrente na clínica, tendo-se revelado como uma importante ferramenta ao nível do diagnóstico.
Figura 64 - Exemplo de um potencial evocado auditivo onde são patentes diversas componentes relativas a diferentes latências. (Adapt. Kandel e Schwartz, 1985).
Atendendo ao que foi descrito anteriormente, um procedimento correcto para obter potenciais evocados deve garantir que o intervalo de tempo entre dois estímulos consecutivos seja suficientemente grande para que as respostas neuronais não se sobreponham, ou seja, para que os circuitos neuronais envolvidos na resposta ao estímulo retornem ao seu estado inicial. E além disso, deve ter-se em atenção que o estímulo seja exactamente o mesmo e feito nas mesmas condições. A este respeito será importante salientar que, se estas condições são razoavelmente satisfeitas no que diz respeito às primeiras componentes de um PE, o mesmo não é válido para componentes de maior latência. Na realidade, e como seria de esperar, conforme a latência vai aumentando, os potenciais medidos vão sendo progressivamente mais complexos, estando relacionados com processamentos cada vez mais elaborados. Assim, se as primeiras componentes dependem maioritariamente do tipo de estímulo e são respeitantes à simples percepção do mesmo, as de latência mais elevada são fortemente dependentes de mecanismos cognitivos como a atenção ou a expectativa, pelo que se torna difícil garantir que o indivíduo mantenha a mesma atitude cognitiva perante o estímulo desde o início do exame até ao seu final.
19.2 Equipamento (facultativo)
Em traços gerais, os modernos equipamentos de EEG resumem-se a dois grandes blocos: o sistema de medida (eléctrodos, amplificadores e restante material de registo) e todo um conjunto logicial necessário para o processamento dos dados

74
(técnicas de imagem, transformadas de Fourier de processamento rápido (FFT43), estatística de comparação de populações, localização de fontes eléctricas neuronais, etc.).
Tendo em conta que a posição dos eléctrodos no escalpe é uma questão que deve obedecer a determinados critérios, em 1958 um comité da Federação Internacional das Sociedades de Electroencefalografia e Neurofisiologia Clínica44 emitiu uma recomendação onde descrevia um modo de padronizar a distribuição dos eléctrodos sobre o escalpe: o sistema internacional 10/20. O principal objectivo desta recomendação foi permitir uma fácil comparação entre os resultados obtidos em diferentes laboratórios. Na Figura 65 encontra-se esquematizada a distribuição sugerida, com a nomenclatura dos diversos eléctrodos. Esta distribuição pressupõe o posicionamento de 21 eléctrodos.
Figura 65 - Posição esquemática dos eléctrodos segundo o sistema internacional 10/20. (Adapt. Lewine e Orrison Jr., 1995).
A colocação dos eléctrodos reveste-se de grande importância, visto que a qualidade das medidas electroencefalográficas é extremamente dependente do modo como o contacto entre os eléctrodos e o escalpe é feito. Para tanto, é necessário esfregar os locais onde os eléctrodos serão posicionados com um gel electrolítico. Este procedimento permite limpar essa região, favorecendo o contacto. Em seguida, colocam-se os eléctrodos nas posições padronizadas, usando para o efeito um capacete ou uma touca que de adapta à medida das diferentes cabeças. Existem diversos tipos de eléctrodos, que variam na forma e no modo de fixação: podem ser aderentes à pele, não precisando de fixação adicional; podem usar um sistema de mola para se segurarem à pele (estes eléctrodos não podem ser usados no escalpe e são unicamente usados nas orelhas, como eléctrodos de referência) ou podem ser fixos através de uma pasta que facilita a aderência do eléctrodo. O uso de toucas onde os eléctrodos são fixos, torna mais fácil manter os eléctrodos na mesma posição durante todo o exame. Por fim, deve garantir-se que a impedância de todos os eléctrodos é a adequado ao registo.
A escolha dos eléctrodos de referência tem sido amplamente discutida, devendo ser criteriosa, visto que se o(s) eléctrodo(s) de referência estiver(em) contaminado(s) com a actividade que se pretender observar, os dados ficam mascarados e pode mesmo não se conseguir discernir os sinais em causa. As estratégias de registo dos potenciais dividem-se em: montagens monopolares montagens em que as medidas de todos os eléctrodos são feitas com referência a um 43 Do inglês - Fast Fourier Transform. 44 International Federation of Societies for Electroencephalography and Clinical Neurophysiology.

75
ou mais eléctrodos e montagens bipolares a medida de cada canal é referente à diferença entre dois eléctrodos, geralmente adjacentes. As montagens monopolares, apesar de serem aquelas que permitem uma mais fácil comparação entre os registos, têm a dificuldade de nenhum eléctrodo ser suficientemente isento de actividade eléctrica. De um modo geral, a média de dois eléctrodos colocados sobre as orelhas ou sobre os mentos é considerada como uma boa opção, ainda que mesmo assim haja sempre contaminação por actividade eléctrica. Uma outra referência que se usa é a média dos valores medidos em todos os eléctrodos. Esta é uma forma de contornar situações em que a referência não seja muito boa, ainda que apresente a desvantagem de alisar as amplitudes medidas, em particular para actividades elevadas. Apesar de as questões relacionadas com os eléctrodos possuírem uma enorme relevância num exame de EEG, existem ainda outros factores que devem ser enfatizados: a calibração do equipamento, a sua sensibilidade e resolução, a sua resposta temporal e os filtros utilizados. Durante o protocolo inicial para o registo dos potenciais, após a colocação dos eléctrodos e a medida das suas impedâncias, procede-se à calibração dos amplificadores. Nessa operação sujeita-se os amplificadores a uma tensão nula, de modo a fazer o ajuste do zero e, em seguida, a uma determinada tensão, de modo a calibrá-los. Uma questão importante que se coloca é o da resolução do equipamento de medida. Nos aparelhos mais antigos, em que o registo era apenas gráfico, a resolução do mesmo estava associado à diferença entre duas tensões próximas capazes de fazer mexer a caneta. Actualmente, as medidas são, normalmente, arquivadas digitalmente (disco rígido, disco óptico, diskette, etc.), após serem submetidas a um conversor analógico-digital (CAD), cujos níveis de amplitude determinam a sua resolução. Em termos de valor absoluto de tensão, esta resolução pode variar de exame para exame, uma vez que é sempre possível definir a gama de valores que se pretendem medir através de adequadas amplificações (valores mais baixos para potenciais evocados, por exemplo). Associada à resolução existe ainda uma outra grandeza, importante em qualquer sistema de medida, que é a sensibilidade (valor mínimo capaz de ser registado). Tendo em conta a sua definição, numa primeira abordagem, a sensibilidade poderá ser confundida com resolução, no entanto, note-se que a sensibilidade poderá ser menor do que a resolução, devido à presença de ruído no equipamento. Assim, a sensibilidade está dependente da qualidade do equipamento e o seu valor deve ser tipo em conta em medições que envolvam pequenas amplitudes do sinal. Uma outra característica de um exame de EEG é a sua taxa de aquisição. Para além de uma quantização em amplitude (imposta pelo CAD), um sinal de EEG é também quantizado em tempo, de modo que um sinal de EEG não é mais do que uma série temporal, sendo o tempo entre amostras determinado pela rapidez com que o equipamento electrónico consegue recolher e guardar informação. A escolha da taxa de aquisição ou amostragem do sinal, para além das limitações técnicas, deve ser escolhida atendendo a um compromisso entre a resolução temporal que se pretender e a memória ocupada pelos dados. De facto, alguns dos potenciais evocados sensitivos, por exemplo, de maior interesse, têm latências na ordem das dezenas de milisegundo, pelo que é comum, nestes casos, usarem-se taxas de aquisição superiores a 500Hz. No entanto, para exames de actividade espontânea cujo registo corresponde, em geral, a cerca de 20 minutos, usar frequências na ordem dos 500Hz para esses registos na rotina clínica, colocaria alguns problemas de memória na manipulação desses dados. O tipo de filtros utilizados num registo de EEG é uma outra questão muito pertinente. De facto, a escolha de um filtro é sempre um compromisso entre o que se

76
pretende eliminar de um sinal exterior e o que se pretende manter do sinal medido. Mais uma vez, a escolha dos filtros a aplicar deve ser feita em consonância com o tipo de medidas que se está a efectuar. Ou seja, as frequências características do sinal a analisar devem ser mantidas, na medida do possível, inalteradas. Refira-se, a este propósito, que actualmente, com a construção de filtros digitais bastante fiáveis, tende-se a abandonar o uso de filtros analógicos muito limitativos, os quais não permitem a recuperação do sinal. Em vez destes tende-se a usar filtros digitais que podem ser aplicados após a recolha dos dados.
19.3 Logística (facultativo) Uma grande parte dos procedimentos abordados nas últimas secções:
determinação da impedância dos eléctrodos, calibração dos amplificadores, escolha da amplificação dos sinais, da sua taxa de aquisição e dos filtros aplicados, são, nos equipamentos modernos, controlados logicialmente. Para além destas especificidades técnicas, o operador pode ainda controlar o tipo de registo que pretende efectuar: registo espontâneo ou potenciais evocados e, neste último caso, explicitar os parâmetros dos estímulos tipo de estímulo, frequência e intensidade do mesmo, tempo de análise, etc. Esta forma de fixar os parâmetros é muito eficiente no que respeita a padronizar os resultados, uma vez que para cada exame existe um menu por defeito que só não será o usado em casos especiais. Os equipamentos mais modernos de EEG são acompanhados por um módulo logicial completo que permite a análise detalhada dos sinais recolhidos. Nesta secção pretende-se referir algumas das capacidades desse equipamento. Mapas - Antes de mais, é possível visualizar os sinais medidos quer de um modo tradicional registo de uma curva que contém a amplitude do sinal ao longo do tempo45 quer em forma de mapa a actividade medida é interpolada para diferentes pontos da cabeça e visualizada num mapa cerebral bi-dimensional (Figura 66).
Figura 66 - Exemplo de um mapa cerebral onde estão representados os potenciais medidos e o resultado da interpolação dos mesmos.
45 A título de curiosidade, mencione-se que, por convenção, os sinais de EEG são apresentados com os potenciais negativos no sentido positivo do eixo dos yy e os potenciais positivos no sentido negativo do eixo dos yy.

77
Médias de pontas – É possível seleccionar vários sinais e somá-los, fazendo-os coincidir no tempo (escolhe-se o instante de amplitude máxima e sobrepõem-se os sinais). Este procedimento permite obter uma melhor relação sinal/ruído, no entanto, pode revelar-se falacioso, uma vez que é possível realizar somas de sinais que não provenham da mesma origem. Para evitar este inconveniente, o operador deve escolher apenas sinais que sejam caracterizados por topologias inequivocamente similares. Estatística - Com o intuito de proceder a uma objectiva avaliação do carácter dos traçados de EEG, cedo se tentou determinar parâmetros ou grandezas que os caracterizassem. Desta forma, surgiu a ideia de aplicar aos registos electroencefalográficos técnicas estatísticas desenvolvidas para sistemas cujo comportamento é muito complexo e imprevisível. Neste contexto, é possível, calcular a média do sinal, os seus momentos, etc. e comparar diferentes sinais ou diferentes troços de um mesmo sinal, através destas grandezas. Este tipo de análise permite ainda a comparação entre populações, sendo, deste modo, possível, avaliar a influência de determinado factor no EEG de um indivíduo normal ou doente. Transformadas de Fourier - Uma área que tem sido extremamente explorada no processamento de dados electroencefalográficos é o das técnicas de transformada de Fourier rápida. Aliás, dada a importância de que os ritmos cerebrais se revestem esta ferramenta tem sido amplamente desenvolvida, sendo possível, por exemplo: 1) a construção de mapas correspondentes a determinadas bandas de frequência, o que permite estabelecer relações entre estas e as regiões cerebrais e 2) a comparação dos espectros correspondentes a diferentes populações ou à mesma população, mas em diferentes condições. Uso de diferentes montagens montagem laplaciana - Uma outra possibilidade que se coloca ao operador que dispõe dos dados guardados digitalmente é a de alterar a montagem dos eléctrodos e pesquisar se existe alguma informação que se torne mais visível após essa modificação. Assim, como foi anteriormente discutido, de um modo geral, os dados são recolhidos através de uma montagem monopolar (habitualmente, usando um ou dois eléctrodos de referência) e é depois possível visualizá-los em montagens monopolares correspondentes a outras referências (média de todos os eléctrodos, por exemplo) ou em montagens bipolares (basta calcular as diferenças entre eléctrodos).
20. Aspectos da electricidade do sistema nervoso Neste capítulo serão, pois, abordados os mecanismos associados à
electricidade do sistema nervoso nas suas diversas vertentes: criação, manutenção e transporte de informação quer ao nível celular, quer num âmbito mais geral, relacionado com a organização cerebral.
20.1 As células gliais Algumas das funções mais interessantes das células (nomeadamente das células cerebrais) estão associadas às propriedades das suas membranas e à forma como elas determinam a diferença de potencial que se estabelece entre o interior e o exterior das células. Quando as concentrações iónicas são diferentes no interior das células relativamente ao exterior, há tendência, como se sabe (ver capítulo 8), para os iões fluírem no sentido das mais altas concentrações para as mais baixas. Porém, ao saírem da célula, os iões, uma vez que são partículas carregadas, provocam diferenças de potencial que se opõem à saída e/ou entrada de mais iões. Há, pois, uma diferença

78
de potencial, a partir da qual deixa de haver fluxo iónico46, uma vez que a tendência provocada pelo gradiente de concentrações é, nessa circunstância, totalmente contrabalançada pelo gradiente de potencial que se estabelece. Ora a equação que governa a dependência do potencial eléctrico com as concentrações iónicas no interior e no exterior de uma célula, no estado de equilíbrio, é a equação de Goldman que, para iões monovalentes, toma a forma:
[ ] [ ]
[ ] [ ]oi
io
+
+ ln
F
RT =
JPKP
JPKP
V
J
J
K
K
J
J
K
K
∑∑∑∑
,
equação 77
onde: R - constante dos gases raros (8.3144 J mol-1 K-1); T - temperatura (em kelvin); F - constante de Faraday (9.6487 x 104 C mol-1); K - percorre todos os iões positivos envolvidos no processo; J - percorre todos os iões negativos envolvidos no processo; Pn - permeabilidade da membrana ao ião n; [n]o - concentração do ião n no exterior da célula, no equilíbrio; [n]i - concentração do ião n no interior da célula, no equilíbrio. Em relação às células neurogliais47, por exemplo, verifica-se que a permeabilidade da membrana ao potássio é muito superior à de outro qualquer ião e, portanto, a equação anterior reduz-se à conhecida equação de Nernst, aplicada ao potássio (K+):
[ ][ ]i+
o+
K
Kln
F
RT = V .
equação 78
Substituindo as variáveis pelos seus valores aproximados, ou seja: R = 8.3143 J.K-1.mol-1
T = 310.15 K F = 9.6487 x 104 C.mol-1 [K+]o = 3 x 10-3 M [K+]i = 0.09 M obtém-se: V = -90.9 mV.
46 Na verdade, o fluxo iónico continua a existir, mas as partículas que entram são totalmente contrabalançadas com as que saem, gerando-se, desta forma, um equilíbrio dinâmico. 47 As células neurogliais são, habitualmente, de pequena dimensão e circundam os corpos celulares e os axónios das células nervosas. A elas se atribuem diversas funções tais como: 1) conferir firmeza aos tecidos cerebrais, analogamente ao tecido conjuntivo de outras regiões do corpo, isolando, por vezes, grupos neuronais; 2) remover os detritos resultantes da morte celular; 3) formar a mielina que envolve alguns axónios; 4) remover os neurotransmissores químicos, após estes terem sido libertados pelos neurónios; 5) permitir armazenar K+, de modo a manter estável a concentração extracelular deste ião; 6) conduzir os neurónios para as regiões correctas durante o seu desenvolvimento e guiar o crescimento dos axónios; 7) participar nas funções correspondentes à barreira hemato-encefálica; 8) ter funções nutrientes.
79
Este valor é totalmente comprovado pelas medidas experimentais, que apontam para a existência de um potencial de cerca de -90mV no interior das células gliais. Refira-se, ainda a este respeito, que a dependência do potencial com as concentrações de potássio segue de perto o comportamento sugerido pela equação 78, de modo que se admite que o factor determinante para o aparecimento do potencial das células gliais é o transporte passivo de iões K+ através de canais selectivos a este ião e presentes na membrana celular. Estas considerações conduzem-nos ao facto de as células neurogliais se comportarem como reguladoras da concentração de K+ no exterior da célula. Como se observará adiante, a alteração da concentração de K+ no espaço extracelular é um dos factores modeladores do funcionamento neuronal, de modo que um desequilíbrio na função das células neurogliais ao nível da sua função homeostática relativamente às concentrações de K+, pode desencadear um anormal processamento de informação por parte dos neurónios.
20.2 As células nervosas ou neurónios Os neurónios são as células responsáveis por todo o tratamento da informação
envolvida nos processos cerebrais. Tipicamente, um neurónio é constituído por quatro regiões diferenciadas: as dendrites, o corpo celular ou soma, o axónio e os seus terminais pré-sinápticos, correspondendo cada um deles, respectivamente, à entrada, integração, condução e transmissão da informação (ver Figura 67). O corpo celular é considerado o centro metabólico e integrador da célula, nele se encontra o núcleo, o retículo endoplasmático e o sistema de Golgi. Às dendrites ou árvore dendrítica fluem numerosos terminais de outros neurónios, sendo este elemento considerado como a região através da qual, tipicamente, entra a informação. O axónio encontra-se, de uma forma geral, do lado oposto à maioria das dendrites e é responsável pela condução da informação até outros neurónios ou até aos músculos. Refira-se que alguns axónios são revestidos por uma camada de mielina (formada por determinadas células gliais as células de Schwann) que é diversas vezes interrompida em regiões a que se dá o nome de nós de Ranvier. Esta disposição do envolvimento isolante, permite que a informação seja mais rapidamente conduzida. Quanto aos terminais do axónio, são estes que estabelecem a comunicação entre dois neurónios, através do contacto directo entre as membranas de ambos sinapse eléctrica ou, mais comummente, mediada por neurotransmissores sinapse química.
20.3 O potencial de repouso
A característica mais determinante das células nervosas é a sua excitabilidade, a qual está intimamente relacionada com as propriedades do seu estado de repouso. Os neurónios encontram-se, no estado de equilíbrio, a cerca de -70mV relativamente ao exterior (note-se que este é um valor médio que depende fortemente do tipo de neurónios que se considere), e quando este valor sofre uma alteração de duas ou três dezenas de mV no sentido positivo, este desequilíbrio acentua-se e o neurónio passa a um estado excitado. O estado de repouso neuronal resulta da interacção de diversos factores: a permeabilidade da membrana aos iões presentes no espaço intra e extracelular, as concentrações desses iões, o transporte activo através da membrana e a diferença de potencial entre o interior e o exterior da mesma.

80
Figura 67 - Esquema das diferentes estruturas de um neurónio: as dendrites; o corpo celular com o núcleo e o citoplasma; o axónio com a blindagem de mielina e os nós de Ranvier e os terminais
sinápticos. (Adapt. Kandel et al, 1995).
Tal como já se referiu em relação às células neurogliais, também o potencial de repouso dos neurónios é regido, em primeira aproximação, pela equação de Goldman (equação 77). Como exemplo ilustrativo pode tomar-se para as diversas concentrações dos iões envolvidos as encontradas no axónio gigante da lula, as quais, apesar de serem tipicamente 3 ou 4 vezes superiores às encontradas nos neurónios dos mamíferos são, em termos relativos, idênticas às destes. Assim, as concentrações iónicas tomam os valores: [K+]o=20mM; [K+]i=400mM; [Na+]o=440mM; [Na+]i=50mM; [Cl-]o=560mM; [Cl-]i=52mM, sendo as permeabilidades relativas: PK
+=1; PNa+=0.04; PCl-=0.45. Donde resulta, para o potencial de repouso, à
temperatura de 25oC: V= -60.9mV. Este potencial negativo está relacionado com o facto de a permeabilidade de membrana para o potássio ser muito maior do que para o

81
sódio (numa relação de 25 para 1). Assim, e uma vez que o gradiente de concentrações do ião K+ é no sentido da saída deste do interior para o exterior, cria-se um potencial negativo que não é compensado com o fluxo de iões Na+ para o interior, visto que a permeabilidade da membrana é, para este ião, muito pequena. É de referir que o potencial de repouso, que corresponde ao fluxo passivo de iões através de canais de membrana selectivos, sendo, portanto, determinado pelos gradientes de concentração e pela permeabilidade relativa da membrana aos diferentes iões, não é o de equilíbrio para o K+ ou para o Na+ isoladamente, o que implica que cada um destes iões tenda a fluir continuamente por transporte passivo (o K+ de dentro para fora o seu potencial de equilíbrio é de aproximadamente -77mV; o Na+ de fora para dentro o seu potencial de equilíbrio é de aproximadamente 56mV). Quanto ao Cl-, tendo um potencial de equilíbrio de cerca de -61mV, não tende a exibir, nestas condições, fluxo efectivo. Quando, no entanto, o potencial de repouso da membrana apresenta valores inferiores/superiores, o ião Cl- tende a sair/entrar na célula levando a um reajuste das suas concentrações. Na realidade, verifica-se que existem fluxos iónicos correspondentes aos iões K+ e Na+ segundo as direcções esperadas, mas que são compensados, como se mencionará adiante, através de transporte activo isto é, com gasto energético. Quanto ao ião Cl- apenas algumas células nervosas apresentam transporte activo deste ião e, neste caso, será também, completamente contrabalançado pelo transporte passivo através de canais membranares.
Figura 68 - Esquema de alguns canais iónicos existentes numa membrana neuronal: os canais de Na+ e de K+ responsáveis pelo transporte passivo destes iões (refira-se que a permeabilidade
relativa da membrana a estes dois iões é de 0.04 para 1); os canais de Na+ e de K+ dependentes do potencial e que são responsáveis pela excitabilidade da membrana e a bomba de Na+/K+ que
mantém as concentrações destes dois iões. (Adapt. Le Cerveau, 1984). Um transporte activo extremamente importante ao nível neuronal é o associado à bomba de sódio/potássio. Esta bomba é uma proteína que, através da hidrólise de uma molécula de adenosina trifosfato (ATP), transporta três iões Na+ para o exterior do neurónio e dois de K+ para o seu interior, contrariando o seu fluxo passivo (ver Figura 68). Esta bomba, para além de manter as concentrações iónicas do Na+ e do K+ nos níveis necessários para manter o potencial de membrana nos valores anteriormente calculados, aumenta-o em cerca de 10%, devido ao facto de ser electrogénica (isto é, por cada dois iões positivos que entram na célula, saem três iões do mesmo sinal, gerando-se, assim, uma diferença de potencial negativa no interior relativamente ao exterior).

82
20.4 O potencial de acção Quando a célula, habitualmente polarizada com valores de cerca de -70mV,
sofre uma despolarização de duas ou três dezenas de mV, esta é acentuada, através de mecanismos de realimentação positiva, atingindo aproximadamente 40mV. Em seguida, tem lugar uma repolarização e, após uma breve hiperpolarização (que pode atingir cerca de -90mV), o seu valor de equilíbrio é retomado (Figura 69). A esta descrição corresponde o potencial de acção que dura, tipicamente, cerca de 2ms, podendo variar entre 1 e 10ms e é o responsável pela transmissão de informação ao longo do axónio.
Figura 69 - Esquema do potencial de acção. Quando o potencial da membrana atinge cerca de -55mV abrem-se os canais de Na+ dependentes da tensão, responsáveis pela despolarização. Ao
fim de algumas décimas de ms são abertos os canais de K+ e fechados os de Na+ de modo a repolarizar a membrana. O fecho tardio dos canais de K+ implica um período final de
hiperpolarização. (Adap. Tortora e Grabowski, 1996).
A criação deste potencial deve-se à existência, na membrana neuronal, de canais de Na+ e de K+ dependentes do potencial. Ou seja, os canais abrem quando se verifica uma despolarização na membrana. Estes canais aumentam a permeabilidade da membrana aos referidos iões de modo que, em conformidade com o que foi exposto anteriormente, passa a existir maior fluxo de iões Na+ para dentro da célula e de iões K+ para fora. Quanto à morfologia do sinal, esta é determinada pelas respostas temporais de ambos os tipos de canais. Assim, como os canais de sódio abrem mais rapidamente de que os de K+, o potencial de membrana aumenta abruptamente, devido à entrada de iões Na+ para o interior do neurónio. Durante essa subida, abrem os canais de K+ que fluem em sentido contrário e, portanto, se opõem à subida do potencial. Este facto, conjuntamente com a circunstância de os canais de Na+ também se fecharem rapidamente, é o responsável pela repolarização da membrana. Como os canais de K+ são lentos a fechar, verifica-se a hiperpolarização já mencionada. O funcionamento dos canais explica ainda, a necessidade de atingir um determinado patamar de despolarização para o aparecimento do potencial de acção e a existência de um período refractário, durante o qual não é possível o surgimento de novo potencial de acção na mesma porção de membrana. Observa-se, pois, que, quando a despolarização não atinge um determinado valor, o potencial de acção não é desencadeado. Esta circunstância verifica-se porque o aumento de permeabilidade ao Na+ suscitado por uma pequena despolarização é totalmente compensado pelos iões K+ que, mesmo no estado de repouso, tendem a fluir para o exterior do neurónio. Quanto ao período refractário durante o qual não é possível a criação de um novo potencial de acção, existem essencialmente dois factores que o determinam: a manutenção de canais de K+ abertos para além da reposição do potencial de repouso e a existência de um estado de inactivação dos canais de Na+. O primeiro está relacionado com o facto de, durante o período de hiperpolarização ser necessária uma

83
maior despolarização para alcançar o patamar correspondente ao despoletar do potencial de acção. O segundo, com a impossibilidade de reactivação dos canais de Na+ nos instantes posteriores ao seu fecho. Refira-se também que os potenciais de acção se propagam ao longo do axónio, transmitindo a informação de um dos seus extremos para o outro. Esta condução é feita do seguinte modo: a criação de um potencial de acção numa determinada região do axónio aumenta o potencial de membrana em redor dessa região, ora quando esse potencial atinge o patamar anteriormente referido, novo potencial de acção é criado e assim sucessivamente em relação às regiões adjacentes. Há, porém, uma questão que se deve ressalvar: a unidireccionalidade dessa propagação. De facto, se fosse possível gerar um potencial de acção a meio de um axónio, este propagar-se-ia em ambos os sentidos. No entanto, os potenciais de acção surgem habitualmente no início do axónio, uma vez que é ao nível do soma que ocorre a integração da informação que aflui ao neurónio e é aí que se determina o aparecimento ou não do potencial de acção. Assim, verifica-se que este se propaga apenas num sentido, graças ao período refractário a que se aludiu anteriormente.
20.5 O papel da mielina na propagação dos potenciais de acção Resta enfatizar o papel da mielina na condução do sinal. As células neurogliais que envolvem alguns neurónios aumentam drasticamente a resistência eléctrica destes, de modo que, praticamente, só é possível a criação de potenciais de acção nas regiões onde esta blindagem se interrompe nos nós de Ranvier, distanciados entre si cerca de 1 ou 2 mm. Supondo que num desses nós se gerou um potencial de acção, o aumento do potencial de membrana propaga-se através do citoplasma até ao nó de Ranvier mais próximo, onde se irá formar novo potencial de acção. Este sistema de condução tem como principal objectivo o aumento da velocidade de propagação dos sinais que pode ser, nos casos mais eficazes, cerca de 100 vezes maior. Além da rapidez de propagação, este sistema tem como vantagem adicional a possibilidade de aumentar a frequência dos potenciais de acção por períodos de tempo mais prolongados, sem saturar os tecidos, uma vez que as trocas iónicas são muito menores.
20.6 As sinapses As sinapses são, como já se referiu, as regiões de contacto entre dois
neurónios. Dividem-se em sinapses eléctricas e químicas. As primeiras são pouco frequentes e nelas a célula pré-sináptica está fisicamente ligada à pós-sináptica. O seu funcionamento limita-se ao contacto entre os citoplasmas das duas células através de canais de pequena resistência, de modo que o potencial de acção, ao chegar ao terminal da célula pré-sináptica, se replica na célula pós-sináptica (ver Figura 70). Estas sinapses não apresentam características modeladoras tão versáteis como as sinapses químicas, no entanto, outras vantagens lhes são inerentes, tais como a ausência de atraso na transmissão do sinal de uma célula para a outra e a facilidade no aparecimento de sincronia num grupo de células onde esta possa, eventualmente, ser desejável.

84
Figura 70 - Esquema de uma sinapse eléctrica. O contacto entre a célula pré-sináptica e a pós-sináptica é feito através de canais que permitem uma transmissão rápida do sinal e facilitam
uma possível sincronia entre as células. (Adapt. Kandel et al, 1995).
No caso das sinapses químicas, a transmissão de informação é modelada por substâncias libertadas pela célula pré-sináptica os neurotransmissores. O mecanismo é o seguinte: os sinais atingem o terminal do axónio, abrem canais de iões cálcio, cuja entrada para o interior da célula desencadeia a libertação de neurotransmissores para o espaço entre os dois neurónios (fenda sináptica); na célula pós-sináptica encontram-se receptores sensíveis a estes neurotransmissores químicos, de modo que, quando detectam a presença destas substâncias, induzem fluxos iónicos que alteram a polarização da membrana (ver Figura 71). Este processo permite uma versatilidade muito grande, uma vez que a modificação da polarização tanto pode ser no sentido da despolarização como no da hiperpolarização. Ou seja, dependendo dos canais iónicos que são abertos, assim a chegada de sinais ao neurónio pré-sináptico pode suscitar o aparecimento de potenciais de acção no neurónio pós-sináptico ou inibi-lo. Deste modo, relativamente às sinapses químicas, consideram-se sinapses excitatórias ou inibitórias consoante o sentido da polarização que provocam na célula pós-sináptica.
Figura 71 - Esquema de uma sinapse química. Quando o potencial de acção chega ao terminal
nervoso da célula pré-sináptica desencadeia a entrada de iões Ca++ que vão, por sua vez, motivar a libertação de neurotransmissores contidos em vesículas que se fundem à membrana
pré-sináptica. Os neurotransmissores irão ser reconhecidos por receptores existentes na célula pós-sináptica que irão desencadear processos responsáveis pela alteração do estado de
polarização do neurónio pós-sináptico. (Adapt. Beatty, 1995).

85
Um conceito que emerge da discussão anterior é o de potencial pós-sináptico: dá-se o nome de potencial pós-sináptico à alteração do potencial de membrana, provocada pela actividade da sinapse, a qual pode, como já se referiu, ser excitatória ou inibitória. A cada potencial de acção que atinge o terminal de um neurónio pré-sináptico pode estar associado um potencial pós-sináptico de, aproximadamente, 1 mV o que significa, tendo em consideração o valor do patamar a partir do qual surge um potencial de acção, que é necessária a soma de vários potenciais para o desencadeamento destes sinais no neurónio pós-sináptico. Na prática verifica-se que, estabelecendo cada neurónio centenas de sinapses (pode chegar a estabelecer, nos casos em que o número de ligações é maior, cerca de 150 000 sinapses, o seu comportamento é determinado pela integração de todas as fontes de informação que a ele afluem. Essa integração espacial e temporal é responsável pela duração dos potenciais pós-sinápticos que pode ser na ordem do segundo, até vários minutos. Deste modo, as sinapses excitatórias e inibitórias, ao coexistirem no mesmo neurónio, são responsáveis pelo facto da resposta desse neurónio a diferentes estímulos, ser uma integração complexa dos diversos impulsos que a ele afluem. Ou seja, um neurónio estimulado por diversas sinapses, pode ou não criar potenciais de acção, dependendo das sinapses inibitórias que, em simultâneo com as excitatórias, se tornem activas. Assim, o aparecimento de potenciais pós-sinápticos excitatórios num neurónio é tão determinante na criação de potenciais de acção como o surgimento de potenciais pós-sinápticos inibitórios, uma vez que o efeito destes últimos pode reduzir ou cancelar o efeito dos primeiros.
20.7 Organização cerebral e actividade eléctrica Nas secções anteriores foram abordadas diversas vertentes da actividade
eléctrica das células cerebrais. Falta, porém, realçar alguns aspectos relacionados com fenómenos eléctricos que envolvem populações de neurónios. A electroencefalografia, técnica a que nos referiremos com maior detalhe em capítulos posteriores e que consiste na medição de potenciais eléctricos ao nível do escalpe, revela-nos que existe actividade eléctrica cerebral síncrona. Isto é, verifica-se que existem grupos de neurónios cuja actividade ocorre em simultâneo, de modo que geram ritmos susceptíveis de ser medidos no exterior do crânio. Por este motivo, cedo se especulou no sentido de o cérebro se organizar segundo circuitos neuronais cada um dos quais responsável pelo processamento de um determinado tipo de informação. Esta ideia tem sido corroborada por numerosos estudos que apontam para a especificidade de determinadas regiões do cérebro. Aceita-se que no lobo occipital se encontram os córtices visuais, associados ao processamento da visão; nos lobos temporais os córtices auditivos, no lobo parietal os córtices somato-sensoriais e no lobo frontal os córtices motor e pré-motor. Refira-se, no entanto, que, se a comunidade científica assume unanimemente que as tarefas mais simples associadas à percepção dos sentidos estão razoavelmente localizadas no cérebro, não é menos verdade que, ao nível das actividades com carácter cognitivo mais evidente, muito se tem especulado. De facto, as evidências experimentais apontam para que as tarefas mais complexas relacionadas com a memória, a aprendizagem ou as emoções, abranjam áreas cerebrais muito amplas e deslocalizadas. Estas áreas ou circuitos parecem trabalhar separadamente, numa espécie de processamento em paralelo, onde cada uma se encontra envolvida num aspecto particular da tarefa comum. O que se mantém sem resposta é o modo como finalmente toda essa informação é coligida, guardada e recuperada em novas situações.

86
21. Aspectos da electricidade dos músculos
Tal como o sistema nervoso central, também a actividade muscular depende de uma forma crucial das propriedades eléctricas das células constituintes dos músculos. Os músculos dividem-se em três categorias: os músculos esqueléticos, os lisos e o cardíaco. Os primeiros encontram-se essencialmente ligados aos ossos e a sua contracção, geralmente voluntária, é responsável pelo suporte e movimento do esqueleto. Os lisos são músculos que envolvem diversos órgãos ou estruturas como o estômago, os intestinos ou os vasos sanguíneos e as suas contracções, involuntárias e coordenadas pelo sistema nervoso autónomo e pelo sistema endócrino, implicam o movimento desses órgãos e estruturas. Quanto ao coração, apresenta características de ambos os tipos de músculo (esquelético e liso) e tem a particularidade de contrair espontaneamente.
21.1 Os músculos esqueléticos
Os músculos esqueléticos são constituídos por células denominadas fibras musculares que, por sua vez, provêm, em termos de desenvolvimento fetal, de um conjunto de células indiferenciadas e mononucleadas às quais se dá o nome de mioblastos (ver Figura 72). Estas fibras têm diâmetros entre 10 a 100 µm e comprimentos que podem ir até 20 cm, não apresentando capacidade de reprodução ao longo da vida.
Quando vistas ao microscópio a principal característica das fibras musculares é apresentarem um padrão de estrias que podem ser observadas, em esquema, na Figura 7348. Estas estrias correspondem à existência de pequenos filamentos com diferentes espessuras organizados em finos cilindros no interior do citoplasma das fibras musculares. O arranjo destes filamentos obedece a um padrão que se repete, cuja unidade fundamental é o sarcómero. Cada uma destas unidades contém, no centro, um conjunto de filamentos grossos que constituem a chamada banda A e em cada um dos extremos um conjunto de filamentos finos que constituem a banda I. Além disso, os filamentos finos sobrepõem-se, numa certa extensão, com os filamentos grossos e pertencem simultaneamente a dois sarcómeros (ver Figura 73). À divisão entre dois sarcómeros dá-se o nome de linha Z.
A forma como os músculos contraem está intimamente ligada a esta disposição. Os filamentos grossos são compostos maioritariamente por miosina, uma proteína cuja estrutura evidencia pequenas cabeças móveis que apresentam afinidade à actina, proteína que é a principal constituinte dos filamentos finos. A contracção muscular ocorre, pois, quando os filamentos grossos e finos deslizam uns sobre os outros através de um mecanismo de encaixe entre as proteínas que constituiem cada um deles. À ligação entre as cabeças da miosina e a actina dá-se o nome de ligações cruzadas. De uma forma muito simples, é possível descrever a contracção muscular considerando 4 fases fundamentais: 1) As cabeças da miosina ligam-se à actina. 2) As cabeças da miosina movimentam-se no sentido de aumentar a extensão em que os filamentos se encontram sobrepostos (ver Figura 74). 3) As cabeças da miosina separam-se da actina. 4) As cabeças da miosina sofrem um processo de aumento de energia de modo a que o processo se repita.
48 Esta propriedade é comum ao músculo cardíaco e responsável por estes dois tipos de músculos serem também conhecidos por estriados.

87
Figura 72 - Esquema da constituição dos músculos esqueléticos. (Adapt. A.J. Vander, J.H.
Sherman e D.S. Luciano, 1998).
Figura 73 - Esquema da constituição das miofibrilhas constituintes dos músculos esqueléticos.
(Adapt. A.J. Vander, J.H. Sherman e D.S. Luciano, 1998).
Um mecanismo igualmente importante é aquele que impede que haja uma contracção do músculo permanente. Verifica-se que os locais na actina que se ligam às cabeças da miosina, estão, no repouso, inacessíveis. Só com a chegada de iões cálcio, estes locais se tornam acessíveis e, portanto, permitem a ligação com a miosina e a consequente contracção muscular.

88
Figura 74 - Ilustração de como o movimento das cabeças da miosina é responsável pela alteração das dimensões dos músculos esqueléticos, determinando a sua contracção ou distensão. (Adapt.
A.J. Vander, J.H. Sherman e D.S. Luciano, 1998).
É neste ponto que os aspectos eléctricos se tornam importantes na
compreensão da contracção muscular. A membrana das fibras musculares é, tal como a dos neurónios, capaz de gerar e propagar potenciais de acção. No caso dos músculos o efeito crucial do aparecimento de um potencial de acção é a libertação de iões cálcio49, que vão, por sua vez, induzir a contracção muscular segundo o mecanismo anteriormente descrito. A este respeito, observa-se que, um único potencial de acção de 1 a 2 ms provoca um estado de contracção muscular que se prolonga tipicamente por cerca de 100 ms. Este facto deve-se a que enquanto a libertação de iões cálcio é bastante rápida, a sua remoção é um processo mais lento e, portanto, o repouso, após a contracção, é mais demorado de atingir.
Figura 75 - Esquema das junções neuromusculares que governam o movimento dos músculos. Na
alínea a) encontra-se representado um único neurónio motor, enquanto que na alínea b) encontram-se representados dois neurónios, deixando claro que cada neurónio não controla
necessariamente fibras musculares adjacentes (Adapt. A.J. Vander, J.H. Sherman e D.S. Luciano, 1998).
49 Neste mecanismo de libertação de cálcio existe uma estrutura constituinte do músculo esquelético o retículo sarcoplasmático que se reveste de particular interesse no armazenamento e libertação dos iões cálcio. No entanto, uma discussão aprofundada sobre o seu papel neste mecanismo encontra-se fora dos objectivos desta disciplina.

89
Falta referir ainda a origem dos potenciais de acção: Os músculos esqueléticos encontram-se ligados a terminais nervosos de neurónios motores. Estes neurónios estabelecem ligações com as fibras musculares, as junções neuromusculares50, e são eles que controlam a actividade dos músculos (ver Figura 75).
Os mecanismos de troca de informação ao nível das junções neuromusculares são muito semelhantes aos que ocorrem nas sinapses químicas: o potencial de acção ao atingir o terminal do axónio, liberta neurotransmissores que são reconhecidos pela membrana da fibra muscular que, ao detectá-los, desencadeia a abertura de canais de cálcio, iniciando o processo de contracção.
21.2 Os músculos lisos
Conforme se referiu anteriormente, os músculos lisos recobrem a maior parte dos órgãos e uma parte dos vasos sanguíneos, conferindo-lhes movimentos de contracção e distensão. Distingue-os dos músculos esqueléticos o facto de não apresentarem uma estrutura estriada e dos nervos que os controlam provirem do sistema nervoso autónomo, o que torna os seus movimentos involuntários. As fibras constituintes do tecido do músculo liso, ao contrário das fibras do músculo esquelético, são células em forma de fuso, com apenas um núcleo e que se reproduzem. No interior destas células encontram-se também filamentos de miosina (filamentos grossos) e de actina (filamentos finos), no entanto, a sua organização não é semelhante à encontrada nos músculos esqueléticos. Os filamentos encontram-se igualmente sobrepostos, sendo o mecanismo de contracção semelhante ao anteriormente explicado a propósito dos músculos esqueléticos, mas em vez dos filamentos se encontrarem paralelos uns aos outros, encontram-se ancorados à membrana da célula e a certos pontos do citoplasma denominados corpos densos (ver Figura 76). Esta geometria faz com que quando os filamentos deslizam uns sobre os outros as dimensões da célula diminuam e, portanto, o músculo se contraia.
Figura 76 - Esquema das ligações entre os filamentos finos e grossos num músculo liso em duas situações distintas: quando o músculo se encontra relaxado e quando se encontra contraído.
(Adapt. A.J. Vander, J.H. Sherman e D.S. Luciano, 1998). 50 Cada neurónio motor estabelece ligação com mais do que uma fibra muscular, mas cada fibra muscular só recebe informação de um único neurónio. Além disso, refira-se que fibras musculares associadas ao mesmo neurónio não têm necessariamente que ser adjacentes (ver figura 46).

90
Embora, em detalhe, o mecanismo bioquímico através do qual as cabeças da
miosina se ligam à actina seja diferente, a presença do cálcio continua a ser o factor que despoleta a ligação das duas proteínas. É interessante observar que a contracção dos músculos lisos é dependente da quantidade de cálcio libertada, uma vez que um potencial de acção induz contracção apenas numa porção das fibras dos músculos lisos51. Além disso, a contracção dos músculos lisos tem uma duração que pode chegar a vários segundos, visto que os mecanismos responsáveis pela sua remoção são muito lentos.
Para além do que foi já referido como diferenças entre os músculos esqueléticos e os músculos lisos, há ainda a acrescentar o facto de alguns músculos lisos apresentarem, tal como o coração, a possibilidade de gerarem, espontaneamente, potenciais de acção. Nestes músculos o potencial de membrana, ao invés de se manter constante, vai continuamente despolarizando. Deste modo, a dado momento, é atingido o limiar de excitação e gerado um potencial de acção. Após a repolarização o ciclo repete-se, gerando-se sinais ritmadamente (ver Figura 77).
Figura 77 - Representação dos potenciais de acção gerados por células auto-excitáveis
pertencentes a alguns músculos lisos. (Adapt. A.J. Vander, J.H. Sherman e D.S. Luciano, 1998).
21.3 O músculo cardíaco
O final da secção anterior é uma boa introdução ao funcionamento do músculo cardíaco, uma vez que um dos aspectos mais interessantes das células constituintes do coração é a sua capacidade de auto-excitação. O músculo cardíaco, como já anteriormente se referiu, apresenta características híbridas dos músculos esqueléticos e lisos. Se por um lado o músculo cardíaco é estriado, tal como os esqueléticos, por outro apresenta pontos de contacto que podem ser considerados como análogos aos corpos densos dos músculos lisos. Os tecidos cardíacos estão electricamente unidos de modo que quando há contracção das paredes das aurículas ou dos ventrículos, estes funcionam como um todo. Há, no entanto, cerca de 1% de células que não participam nessa contracção, mas que são responsáveis pela condução do sinal controlando, rigorosamente, a sua propagação quer no tempo, quer no espaço (ver Figura 78).
51 Recorde-se que nos músculos esqueléticos apenas um potencial de acção é capaz de induzir contracção em todo o músculo.
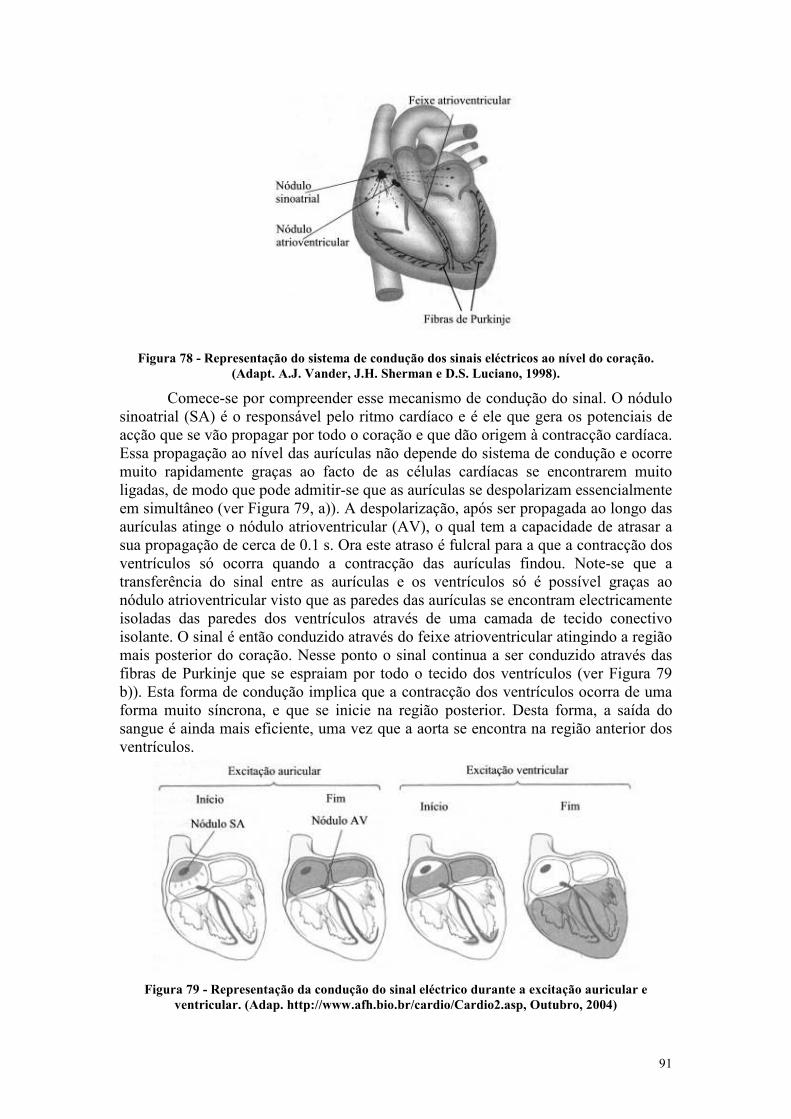
91
Figura 78 - Representação do sistema de condução dos sinais eléctricos ao nível do coração.
(Adapt. A.J. Vander, J.H. Sherman e D.S. Luciano, 1998).
Comece-se por compreender esse mecanismo de condução do sinal. O nódulo sinoatrial (SA) é o responsável pelo ritmo cardíaco e é ele que gera os potenciais de acção que se vão propagar por todo o coração e que dão origem à contracção cardíaca. Essa propagação ao nível das aurículas não depende do sistema de condução e ocorre muito rapidamente graças ao facto de as células cardíacas se encontrarem muito ligadas, de modo que pode admitir-se que as aurículas se despolarizam essencialmente em simultâneo (ver Figura 79, a)). A despolarização, após ser propagada ao longo das aurículas atinge o nódulo atrioventricular (AV), o qual tem a capacidade de atrasar a sua propagação de cerca de 0.1 s. Ora este atraso é fulcral para a que a contracção dos ventrículos só ocorra quando a contracção das aurículas findou. Note-se que a transferência do sinal entre as aurículas e os ventrículos só é possível graças ao nódulo atrioventricular visto que as paredes das aurículas se encontram electricamente isoladas das paredes dos ventrículos através de uma camada de tecido conectivo isolante. O sinal é então conduzido através do feixe atrioventricular atingindo a região mais posterior do coração. Nesse ponto o sinal continua a ser conduzido através das fibras de Purkinje que se espraiam por todo o tecido dos ventrículos (ver Figura 79 b)). Esta forma de condução implica que a contracção dos ventrículos ocorra de uma forma muito síncrona, e que se inicie na região posterior. Desta forma, a saída do sangue é ainda mais eficiente, uma vez que a aorta se encontra na região anterior dos ventrículos.
Figura 79 - Representação da condução do sinal eléctrico durante a excitação auricular e
ventricular. (Adap. http://www.afh.bio.br/cardio/Cardio2.asp, Outubro, 2004)
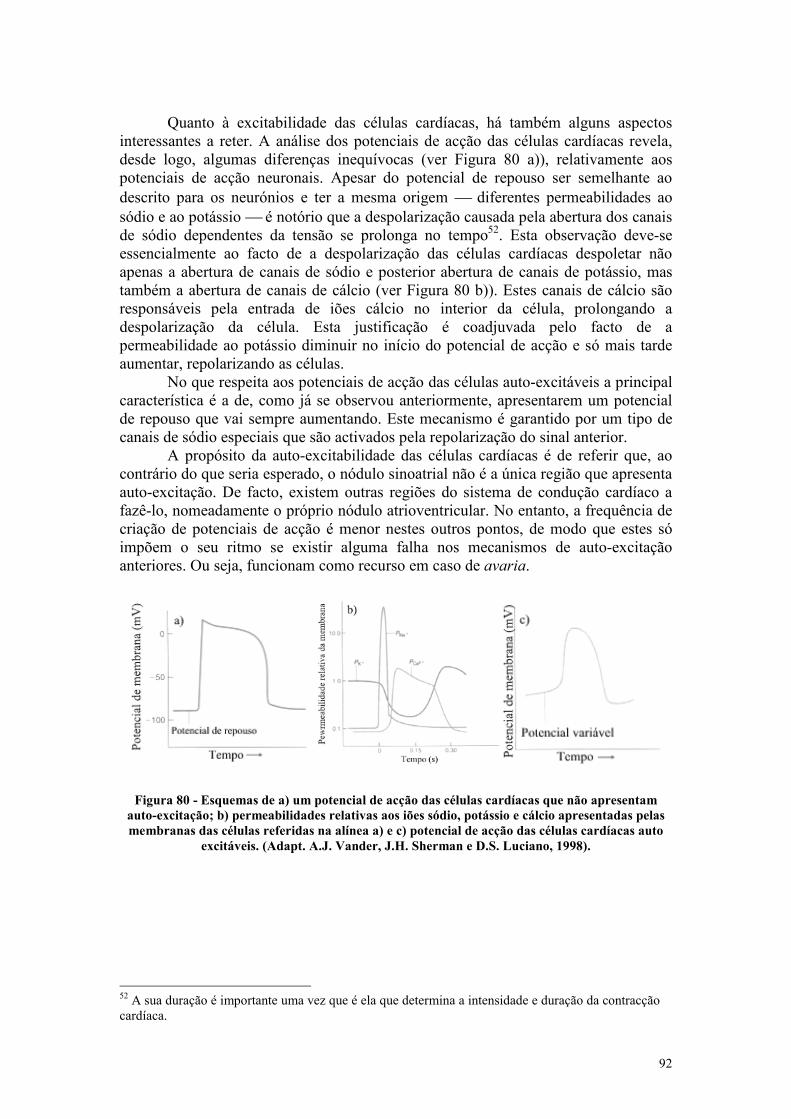
92
Quanto à excitabilidade das células cardíacas, há também alguns aspectos
interessantes a reter. A análise dos potenciais de acção das células cardíacas revela, desde logo, algumas diferenças inequívocas (ver Figura 80 a)), relativamente aos potenciais de acção neuronais. Apesar do potencial de repouso ser semelhante ao descrito para os neurónios e ter a mesma origem diferentes permeabilidades ao sódio e ao potássio é notório que a despolarização causada pela abertura dos canais de sódio dependentes da tensão se prolonga no tempo52. Esta observação deve-se essencialmente ao facto de a despolarização das células cardíacas despoletar não apenas a abertura de canais de sódio e posterior abertura de canais de potássio, mas também a abertura de canais de cálcio (ver Figura 80 b)). Estes canais de cálcio são responsáveis pela entrada de iões cálcio no interior da célula, prolongando a despolarização da célula. Esta justificação é coadjuvada pelo facto de a permeabilidade ao potássio diminuir no início do potencial de acção e só mais tarde aumentar, repolarizando as células.
No que respeita aos potenciais de acção das células auto-excitáveis a principal característica é a de, como já se observou anteriormente, apresentarem um potencial de repouso que vai sempre aumentando. Este mecanismo é garantido por um tipo de canais de sódio especiais que são activados pela repolarização do sinal anterior.
A propósito da auto-excitabilidade das células cardíacas é de referir que, ao contrário do que seria esperado, o nódulo sinoatrial não é a única região que apresenta auto-excitação. De facto, existem outras regiões do sistema de condução cardíaco a fazê-lo, nomeadamente o próprio nódulo atrioventricular. No entanto, a frequência de criação de potenciais de acção é menor nestes outros pontos, de modo que estes só impõem o seu ritmo se existir alguma falha nos mecanismos de auto-excitação anteriores. Ou seja, funcionam como recurso em caso de avaria.
Figura 80 - Esquemas de a) um potencial de acção das células cardíacas que não apresentam auto-excitação; b) permeabilidades relativas aos iões sódio, potássio e cálcio apresentadas pelas membranas das células referidas na alínea a) e c) potencial de acção das células cardíacas auto
excitáveis. (Adapt. A.J. Vander, J.H. Sherman e D.S. Luciano, 1998).
52 A sua duração é importante uma vez que é ela que determina a intensidade e duração da contracção cardíaca.

93
VII ELEMENTOS DE TERMODINÂMICA Neste capítulo ir-se-á assumir, uma vez mais, que alguns dos conceitos mais importantes para a compreensão da Termodinâmica, como as noções de calor, temperatura e respectivas escalas, pressão, volume e Lei dos Gases Ideais são conteúdos que os alunos já dominam e pretende-se avançar para tópicos que estarão mais aplicados aos sistemas biológicos e que, por isso, serão mais apropriados a uma disciplina de Física de um curso para Ciências Biomédicas, como sejam o transporte de massa e as Leis Fundamentais da Termodinâmica. Para uma revisão associada aos conceitos de calor e temperatura os alunos poderão consultar o ANEXO F destes apontamentos. Além disso, para os alunos mais interessados e que pretendam aprofundar algumas noções relativas a Teoria Cinética dos Gases, sobre a forma como o calor é transferido para os corpos e de como estes se comportam nessas circunstâncias, existe também ao seu dispor o ANEXO G.
22. Transporte passivo e activo Embora estejamos habituados a associar a Termodinâmica ao transporte de
calor ou mesmo de trabalho, o transporte de massa é também uma forma de transportar energia que não se deve desprezar e muito menos nas Ciências da Saúde. De facto, a forma como as substâncias se movimentam nos tecidos reveste-se de particular interesse na compreensão do funcionamento do corpo humano. Por este motivo, neste sub-capítulo, ir-se-á abordar, de uma forma simples, o formalismo associado ao transporte de substâncias através de um meio que poderá ser homogéneo (difusão livre) ou heterogéneo (através de membranas, por exemplo).
22.1 Difusão livre A experiência diz-nos que se introduzirmos uma solução colorida no interior
de um líquido, observa-se a cor da solução a espraiar-se gradualmente através do líquido. A este processo, em que as moléculas da solução se movimentam das regiões de maior concentração para as regiões de menor concentração, dá-se o nome de difusão.
A difusão deve-se ao caminho aparentemente aleatório que as moléculas percorrem nas suas constantes colisões. A propósito da teoria cinética dos gases referiu-se que as moléculas não só possuíam uma velocidade média, como colidiam incessantemente umas com as outras. Seja L a distância média que as moléculas percorrem sem colidir, também denominado o livre percurso médio das partículas. Verifica-se, através de cálculos estatísticos, que a distância a que uma molécula se encontra do ponto de partida, após colidir N vezes é dada por:
NLS = . Com base nesta informação é possível determinar o tempo necessário para uma determinada substância difundir-se através de uma distância S. Comece-se por calcular o espaço percorrido pela partícula:
L
S
L
SLLN
2
2
2
percorrido espaço === .

94
Se a velocidade média das partículas for v, então o tempo necessário para percorrer S, será:
Lv
S
vt
2percorrido espaço== .
equação 79
Atendendo a que as molécula num líquido como a água estão muito próximas (L é muito pequeno, da ordem de 10-8 cm) e que a sua velocidade média é, à temperatura ambiente, cerca de 102 m s-1. Então o tempo necessário para uma molécula de água percorrer 1 cm será:
( )s40m46h2s10
1010
10 4
210
222
==×
==−
−
Lv
St .
Repare-se, no entanto, que, se a distância de difusão for da ordem de 10-3 cm (que é a dimensão típica de uma célula tecidular a difusão é extremamente rápida (da ordem de 10-2 s). Por este motivo, embora a difusão macroscópica num líquido seja um processo relativamente lento, este mecanismo aplicado à troca de oxigénio, nutrientes e detritos ao nível celular é bastante eficiente. Note-se, ainda, que o facto de nos gases as moléculas estarem mais afastadas, implica que o livre percurso médio seja maior do que nos líquidos (cerca de 3 ordens de grandeza nos gases à pressão atmosférica: cm10 5−=L ). Pelo que, uma molécula de gás, nessas condições, demora apenas cerca de 10 s para percorrer uma distância de 1 cm. Uma outra abordagem da difusão livre consiste no cálculo do número de partículas que atravessam uma dada região em função da densidade53 dessas partículas no meio. Considere-se a Figura 81 que representa um conjunto de moléculas num recipiente cilíndrico em duas regiões distintas.
Figura 81 - Representação de um conjunto de moléculas com concentrações diferentes em duas
regiões distintas. (Adap. de P. Davidovits, 2001).
53 Neste contexto entende-se densidade como o número de partículas por unidade de volume.

95
Na região 1 (considerada a origem dos eixos) a densidade das moléculas é ρ1, enquanto que na região 2 (à distância S da primeira) a densidade é ρ2. Se VD for a velocidade de difusão54, obtém-se:
S
Lv
LvS
S
t
SVD ===
2,
atendendo à equação 79. Calculemos em seguida o número de moléculas por unidade de área e de tempo, J1, que atravessa uma fatia ∆x do recipiente na região 1 em direcção à região 2. Comece-se por calcular o número total de moléculas nessa fatia, por unidade de área e de tempo:
DVtA
xA
tA
V
tA
NJ 1
11'1 ρ
ρρ=
∆
∆=
∆=
∆= ,
onde N o número total de moléculas na fatia considerada, A a área da secção recta, ∆t o intervalo de tempo, V o volume, ∆x a espessura da fatia e ρ1 a densidade de moléculas na região 1. Admitindo que estatisticamente metade dessas moléculas se movimentam no sentido da região 2 e a outra metade em sentido contrário, então:
221
'1
1DVJ
Jρ== .
De igual modo, o número de moléculas por unidade de área e de tempo que se movimentam da região 2 para a região 1 (ou também chamado fluxo, em unidades de m-2 s-1), será:
22
2DV
Jρ= .
Pelo que, o fluxo total da região 1 para a região 2 será a diferença de ambos:
( ) ( )S
LvVJJJ D
222121
21
ρρρρ −=
−=−= ,
onde a velocidade de difusão foi substituída pela sua expressão em função do livre percurso médio, L, da velocidade média quadrática, v, e do espaço percorrido, S. Podendo esta expressão ser reescrita em função do coeficiente de difusão, D:
( )S
DJ 21 ρρ −= ,
equação 80
54 Repare-se que VD é a velocidade média associada à difusão (e, portanto, será a razão entre o deslocamento das partículas e o intervalo de tempo necessário para esse deslocamento) e que v é a velocidade média associada à totalidade do espaço percorrido (será, pois, a razão entre o espaço total percorrido pela partícula e o mesmo intervalo de tempo).

96
sendo esta equação conhecida como a Lei de Fick da difusão55. O coeficiente de difusão no caso considerado é metade do produto do livre percurso médio com a velocidade média quadrática. No entanto, em situações mais complexas poderá ter uma expressão mais complicada. Aliás, para compreender a dependência deste parâmetro com diversos factores basta atentar no facto de mesmo o livre percurso médio ser função das dimensões das moléculas e da viscosidade do meio de difusão.
22.2 Difusão através de membranas Na secção anterior estudou-se o transporte de substâncias num meio
homogéneo. No entanto, na maior parte das situações biológicas as substâncias são transportadas através de membranas o que modifica de sobremaneira o fluxo de matéria. De uma forma muito simples é possível definir o fluxo através de uma membrana através da expressão:
( )21 ρρ −= PJ , equação 81
sendo P a permeabilidade da membrana à substância em estudo, com unidades de velocidade e ( )21 ρρ − a diferença de densidades da substância em cada um dos lados da membrana56. O parâmetro P mede a maior ou menor facilidade com que as moléculas atravessam a membrana, dependendo do tipo de canais que esta possui (ver Figura 82).
Figura 82 - Representação de uma membrana com os respectivos canais. Nesta figura ilustra-se a selectividade dos canais, neste caso, determinadas pelas dimensões das partículas. (Adap. de P.
Davidovits, 2001).
Em alguns casos as membranas são selectivas, ou seja, permitem a passagem
de algumas substâncias, mas evitam a passagem de outras. Em particular, esta situação verifica-se com muita frequência no que respeita à água57. A este efeito selectivo associado à água dá-se o nome de osmose. Suponha que se divide um
55 Esta equação aparece muitas vezes representada com a grandeza densidade substituída por concentração. Nesse caso, a única diferença reside nas unidades de fluxo que passam a ser mol m-2 s-1. 56 Também neste caso, as densidades podem ser substituídas por concentrações. 57 A água é constituída por moléculas muito pequenas cuja circulação raramente é barrada pelas membranas que evitam a passagem de moléculas maiores, mas são completamente permeáveis à água.

97
recipiente em dois através de uma membrana colocada no seu interior que só permita a passagem da água (Figura 83). Numa das divisões coloca-se água pura e na outra uma solução de água com açúcar, por exemplo. Após deixar sistema evoluir, verifica-se que a situação de equilíbrio corresponde a uma parte da água na primeira divisória ter sido transferida para a segunda. A explicação microscópica deste fenómeno prende-se com o facto de as moléculas de água da solução terem maior dificuldade em chegar às paredes da membrana, uma vez que encontram pelo caminho as moléculas de açúcar. Por sua vez a água pura atinge as paredes da membrana com mais facilidade, o que implica que o fluxo de moléculas de água da primeira para a segunda divisória seja maior do que em sentido contrário.
início equilíbrio
Figura 83 - Ilustração do fenómeno de osmose. (Adap. de J.B Marion e W.F. Hornyak, 1985).
Devido aos motivos anteriormente expressos, verifica-se que, no equilíbrio, a
solução apresenta uma altura superior à da água pura (Figura 83). À quantidade ρgh (onde h é a diferença de alturas, g a aceleração da gravidade e ρ a densidade da solução) dá-se o nome de pressão osmótica da solução e representa-se pela letra grega Π. Uma forma de compreender o significado físico da pressão osmótica é entender que esta é a pressão adicional que se teria que exercer na água para que esta não atravessasse a membrana. Um resultado bastante interessante foi o encontrado por J.H. van’t Hoff ao perceber que a pressão osmótica é directamente proporcional à concentração da solução e à sua temperatura absoluta. Considerando a constante de proporcionalidade o parâmetro ℜ, obtém-se:
TnVTV
nCT ℜ=Π⇔ℜ=Π⇔ℜ=Π ,
equação 82
que é uma expressão muito semelhante à equação dos gases ideais discutida anteriormente. Analogia que se torna tanto mais evidente quanto o facto de ℜ apresentar um valor muito aproximo ao da constante dos gases ideais R.
É ainda de referir a notável influência que o fenómeno da osmose tem ao nível do equilíbrio dos tecidos. Repare-se que todas as células são revestidas por membranas semipermeáveis o que implica um enorme equilíbrio entre as pressões osmóticas no interior e no exterior das células para que estas não percam ou ganhem demasiada água com a consequente alteração do seu volume.
Até aqui tem-se referido o transporte espontâneo, ou seja, o transporte de massa que ocorre no sentido das maiores concentrações para as menores concentrações. No entanto, várias são as situações em que o transporte ocorre em

98
sentido contrário com o natural consumo energético. Este tipo de transporte, ao qual se dá o nome de transporte activo, é perpetrado por proteínas de membrana as bombas que são muitas vezes responsáveis pela manutenção das concentrações iónicas vitais para o funcionamento celular. Uma vez que este tipo de transporte envolve, geralmente, o transporte de iões, o seu funcionamento está relacionado com diferenças de potencial eléctrico existente entre o interior e o exterior das membranas e, por esse motivo, será abordado com maior detalhe no capítulo respeitante ao comportamento eléctrico dos sistemas biológicos.
22.3 A importância da difusão na oxigenação Como é do conhecimento geral, a energia necessária para a manutenção do
corpo humano é fornecida essencialmente pela oxidação dos alimentos que ingerimos, sendo, portanto, crucial o consumo de oxigénio. Verifica-se que a forma mais simples de oxigenar o corpo humano é através da difusão de moléculas de oxigénio através da pele. Porém, este mecanismo é muito pouco eficiente verificando-se que no homem, por exemplo, apenas 2% das suas necessidades em oxigénio poderão ser supridas através deste processo. Os pulmões são, pois, a forma encontrada para tornar o ritmo das trocas gasosas adequado às exigências. De facto, a superfície dos alvéolos é cerca de 50 vezes superior à superfície da pele e, além disso, a distância entre os alvéolos e os capilares é cerca de 4 x 10-5 cm, pelo que a troca de oxigénio e de dióxido de carbono através da difusão entre os pulmões e os capilares é bastante rápida. Quanto ao sentido do fluxo dos gases é fácil compreender que este se processa tendo em conta as diferenças de concentração dos mesmos: no caso do oxigénio será dos pulmões para os capilares, no caso do oxigénio será dos capilares para os pulmões.
23. Leis da Termodinâmica A Termodinâmica é tida como a ciência que estuda as relações entre o calor, o
trabalho e as subsequentes trocas energéticas. É de referir que a termodinâmica assenta fundamentalmente em duas importantes leis: a primeira é, na sua essência, a lei de conservação da energia, enquanto que a segunda regulamenta o tipo de trocas energéticas que poderão existir entre os sistemas.
23.1 Primeira Lei da Termodinâmica
Como já se referiu, a Primeira Lei da Termodinâmica é a Lei da Conservação da Energia58 que estabelece que a energia não é gerada nem perdida, apenas transformada noutras formas de energia. Ou seja, se um sistema receber energia (qualquer que seja a sua forma) essa energia poderá ser utilizada para aumentar a energia interna desse sistema, ou poderá ser libertada sob qualquer outra forma, nomeadamente, através de calor ou da realização de trabalho. Esta lei pode ser representada através da expressão:
WQE −=∆ . equação 83
58 A Lei de Conservação da Energia é inicialmente introduzida como uma lei de conservação da energia mecânica. E neste formato estabelece que a variação de energia de um sistema ao qual só estão aplicadas forças conservativas (cujo trabalho não depende da trajectória) é nulo e a variação de energia de um sistema ao qual estão também aplicadas forças não-conservativas (também chamadas dissipativas) iguala a energia dissipada por essas forças. Quando o conceito de calor tomou o significado de energia, a lei foi revista no sentido de englobar esta forma de energia, dando lugar àquela que é actualmente conhecida como a Primeira Lei da Termodinâmica.

99
onde E∆ é a variação de energia interna do sistema, Q é o calor recebido pelo sistema (se Q for negativo toma o significado de calor cedido pelo sistema) e W é o trabalho realizado pelo sistema (se W for negativo toma o significado de trabalho realizado sobre o sistema)59.
23.2 Segunda Lei da Termodinâmica Facilmente se verifica que existe uma infinidade de fenómenos que, embora
sejam permitidos pela Primeira Lei da Termodinâmica, não ocorrem espontaneamente. Pense-se, por exemplo, no fluxo de calor cujo sentido é sempre o dos corpos a temperatura mais elevada para aqueles que se encontram a temperaturas mais baixas e nunca o inverso. Existem ainda exemplos mais simples, como o facto de um prato partido não regressar ao estado inicial espontaneamente, ou o de água derramada regressar ao copo de onde caiu. A irreversibilidade destes processos está intimamente relacionada com questões probabilísticas. Para entender esta questão coloque-se uma situação simples: imagine-se três moedas que se encontram num estado dito ordenado quando as três faces cara se encontram viradas para cima. Seguidamente as moedas são misturadas de maneira a que, uma vez largadas, seja igualmente provável aparecer a face cara ou a face coroa. Uma análise das várias combinações possíveis indica-nos que existe apenas uma hipótese em oito de as moedas regressarem ao estado inicial. Existindo sete hipóteses em oito de adquirirem qualquer das outras combinações. Ou seja, os estados desordenados são mais prováveis do que os ordenados. Repare-se ainda que quanto maior for o número de moedas, mais improvável será retomarem ao estado considerado ordenado, ou seja, aquele que corresponde a todas as moedas terem a face cara voltada para cima. De tal forma que, se o número de moedas for suficientemente grande, a possibilidade de elas regressarem ao estado ordenado é considerada negligível60. À luz deste exemplo, a Segunda Lei da Termodinâmica poderá ser introduzida da seguinte forma: As alterações espontâneas num sistema são no sentido dos estados de menor probabilidade para os estados de maior probabilidade. Ou seja, dos estados mais ordenados para os estados mais desordenados. Assim, alterações que envolvam a passagem para estados mais organizados exigem o consumo de energia, não podendo, portanto, ser consideradas espontâneas. Ou seja, um sistema ordenado deixado evoluir livremente tenderá a perder a sua organização.
Uma das áreas em que a Segunda Lei tem uma aplicação directa é limitando os processos em que ocorre conversão de calor em trabalho. Para compreender como, debrucemo-nos sobre as diferenças entre o calor e as restantes formas de energia.
Na verdade, a principal característica que distingue o calor das restantes formas de energia é a sua natureza aleatória. Vejamos, por exemplo, o que se passa quando o calor é transmitido por condução ou por convecção. Como já foi discutido anteriormente, esse transporte está relacionado com o movimento caótico das partículas, ou seja, corresponde a um processo não ordenado. Também quando o calor é transmitido através de radiação electromagnética, as ondas tomam qualquer direcção, são caracterizadas por uma larga gama de comprimentos de onda e apresentam fases aleatórias. Se discutirmos as outras formas de energia verificamos que se manifestam através de processos mais ordenados: a energia potencial gravítica
59 Note-se que os sinais das diferentes variáveis são convencionais e é possível encontrar na literatura outras convenções, com as consequentes alterações nos sinais da expressão 43. 60 Repare-se que se para 3 moedas a probabilidade de obter um estado ordenado é de 1/8 (0.125), para 10 moedas a probabilidade é de 0.001!

100
de um objecto corresponde a uma posição bem definida no espaço; o trabalho realizado por uma força está intimamente relacionado com a trajectória descrita pelo objecto ao qual a força é aplicada; a energia química depende das conformações específicas que determinadas moléculas adquirem… Ou seja, enquanto a maioria das formas de energia depende de processos bem determinados, o calor apresenta um carácter desordenado e, por isso e tendo em atenção o que foi anteriormente discutido referente à maior probabilidade dos sistemas desordenados, enquanto que qualquer forma de energia se transforma espontaneamente em calor, o contrário não é válido.
Um modo mais formal de introduzir a Segunda Lei da Termodinâmica é através do seguinte enunciado: Considerando um fluxo de calor, Q, entre uma temperatura mais elevada, T2, e uma temperatura inferior, T1, apenas uma fracção desse calor poderá ser transformado em trabalho, W, cumprindo-se a relação:
1
21T
T
Q
W−= .
equação 84
Analisando a equação anterior, facilmente se conclui que o calor só poderia ser totalmente convertido em trabalho se a temperatura mais baixa (representada por T1 fosse zero). Como esta expressão só é válida considerando as temperaturas na escala Kelvin e o zero absoluto é impossível de alcançar, conclui-se que o calor nunca é totalmente transformado em trabalho.
23.3 Aplicação das duas Leis da Termodinâmica às necessidades energéticas dos seres vivos
Embora seja evidente que os seres vivos não sobrevivem sem se alimentar, o motivo pelo qual isso sucede é menos fácil de compreender, sendo necessário recorrer à conjugação das duas leis estudadas anteriormente para o justificar. Comecemos por pensar num corpo que não só tem que manter a sua temperatura contra um meio que se encontra a uma temperatura, por hipótese, menor, como também realiza trabalho, através de movimentos musculares. À luz da Primeira Lei compreende-se que só com a entrada de energia é possível manter estas duas funções (ver Figura 84).
Figura 84 - Esquema das trocas energéticas entre o corpo e o exterior. (Adap. de P. Davidovits,
2001).
Esta abordagem conduz-nos, no entanto, à seguinte questão: “Um corpo que se mantenha termicamente isolado e não realize trabalho muscular sobreviverá sem se alimentar? E, em caso da resposta ser negativa, em que será utilizada essa energia? Repare-se que segundo a Primeira Lei a situação é perfeitamente possível: se não
Energia interna: química térmica
Entrada de energia (alimentos)
Calor
Trabalho

101
entra nem sai energia do corpo, então a energia interna manter-se-á constante…”61. Na verdade, é necessário recorrer à Segunda Lei para compreender o que se passa nestas circunstâncias. Recorde-se que um sistema vivo é um sistema extraordinariamente ordenado. Um sistema com estas características, deixado evoluir livremente, tenderia a perder a sua ordem e, no limite, tornar-se-ia disfuncional. Deste modo, um ser vivo ainda que não interagisse com a vizinhança exigia energia para manter a sua ordem interna.
23.4 Entropia e Segunda Lei Neste capítulo, várias têm sido as referências à ordem de um sistema e à sua
importância. É, pois, compreensível que surja uma grandeza que a meça. A essa grandeza dá-se o nome de entropia e, a este nível de conhecimentos, é, habitualmente, definida em termos da sua variação, S∆ . Em particular, num processo que ocorra a uma temperatura constante, T , a variação de entropia de um sistema que receba (ou perca) uma quantidade de calor Q∆ é definida como:
T
QS∆=∆ ,
equação 85
o que implica que a entropia tenha como unidade J K-1. Com base nesta grandeza tem-se, ainda, uma outra formulação da Segunda Lei que é enunciada da seguinte forma: A entropia de um sistema isolado (ou seja, que não realiza trocas energéticas com o exterior) nunca diminui62. A título de discussão, gostaríamos ainda de atentar no facto de a aquisição de ordem por parte dos sistemas exigir não apenas energia, mas também informação. De facto, para que a energia seja utilizada no sentido de ordenar um sistema é necessário saber exactamente como fazê-lo. Assim, associada a este tema está esta outra grandeza (informação) que é tão crucial como a energia para que a entropia de um sistema diminua. Ou seja, fazendo, uma vez mais, um paralelismo que o que se passa nos seres vivos, poderemos afirmar que para manter estes sistemas funcionais, é necessário que estes estejam ordenados, pelo que estes recebem energia por via dos alimentos que ingerem (energia química) ou directamente do sol (no caso das plantas com clorofila) e acedem à informação de como essa energia pode ser utilizada através do DNA.
23.5 Aspectos da energética do corpo humano Como já e referiu anteriormente o corpo humano necessita de energia para
diversas tarefas, por conveniência estipulou-se uma grandeza média de consumo energético a que se dá o nome de taxa metabólica e cuja unidade é J m-2 s-1 em S.I., embora seja muito comum ser dada em kcal m-2 hora-1. A taxa metabólica média para diferentes actividades está apresentada na Tabela 3.
61 Repare-se que esta situação é, obviamente, hipotética, uma vez que um ser vivo nunca poderia ser um sistema isolado… De modo que esta hipótese deve ser considerada apenas como conceptual e utilizada para introduzir a importância da Segunda Lei da Termodinâmica neste contexto. 62 Note-se que sendo a entropia uma medida da ordem, esta é apenas uma outra forma de dizer que um sistema que não troque energia com o exterior deixado evoluir espontaneamente, nunca tende para estados de maior ordem.

102
Actividades Taxa Metabólica (kcal m-2 hr-1) Dormir 35 Vigília (repouso) 400 Sentado 50 Em pé 60 Andar 140 Trabalho físico moderado 150 Andar de bicicleta 250 Correr 600 Tiritar de frio 250
Tabela 3 - Taxas metabólicas para diferentes actividades. (Adapt. de P. Davidovits, 2001).
Em muitas situações é importante conhecer-se o consumo energético de um indivíduo que realize determinada tarefa. Pelo que foi exposto, para tanto, será necessário conhecer a área da superfície do corpo. Ora, geralmente, as variáveis susceptíveis de medida são a massa e a altura dos indivíduos. Uma expressão empírica que permite obter a área da superfície a partir destas variáveis é:
725.0425.0202.0 hmA ××= , equação 86
onde A é a área da superfície do corpo em metros quadrados; m será a massa em kilograma e h a altura em metros. Para compreender a forma como são utilizadas estas expressões, calcule-se a energia consumida por um indivíduo de 70 kg e 1.55 m de altura durante um dia, admitindo que não executa qualquer outra actividade a não ser permanecer deitado63. Comece-se por calcular a área aproximada do corpo:
( ) ( ) 2725.0425.0 m69.155.170202.0 =××=A .
Em seguida, calcule-se a energia consumida numa hora (consultar a Tabela 3):
-1' horakcal6.6769.140áreametabólica taxa =×=×=E . E, por fim, para o cálculo da energia consumida num dia:
kcal162224 67.6horas 24' ≅×=×= EE . Tal como já foi referido, a energia necessária para o funcionamento do corpo humano é obtida a partir da oxidação dos diversos nutrientes, nomeadamente, hidratos de carbono, proteínas, lípidos (gorduras) e álcoois. Cada um destes tipos de nutrientes tem reacções de oxidação associadas, nas quais existe libertação de energia. A oxidação da glucose, por exemplo, é descrita através da equação:
energiaO6H6CO6OOHC 2226126 ++→+ .
63 Neste exemplo de aplicação não se irá fazer distinção entre o consumo energético durante as horas de sono e as restantes.

103
Em média, é aceite que por cada grama de hidratos de carbono ou proteínas oxidados são libertadas 4 kcal, por cada grama de lípidos, são libertadas 9 kcal e por cada grama de álcool são libertadas 7 kcal. Relativamente a este balanço energético há ainda a considerar dois pontos importantes, o primeiro diz respeito ao facto de a oxidação dos nutrientes às temperaturas habituais do corpo não ocorrer espontaneamente. Por este motivo, é necessária a participação de catalizadores (que no corpo humano são formados por moléculas muito complexas a que se dá o nome de enzimas) que promovem estas reacções. Uma segunda questão está relacionada com o facto destas reacções exigirem consumo de oxigénio64, o que, por sua vez, implica gastos energéticos que devem ser tidos em conta quando se calculam doses recomendadas de alimentos. Um aspecto importante da energética do corpo humano prende-se com o controlo de temperatura, o qual envolve diversos mecanismos. Tendo em conta que da energia muscular gasta, apenas cerca de 20% é aproveitada sob a forma de trabalho, observa-se que a restante energia é transformada em calor, o qual, se permanecesse no interior do corpo, torná-lo-ia disfuncional devido ao aumento de temperatura. Deste modo, é necessária a existência de um processo eficiente de transferência de calor do interior para o exterior. E é ainda necessária uma diferença de temperaturas entre a pele e o interior do corpo que promova o fluxo de calor. No entanto, se o mecanismo de transporte de calor no interior do corpo se limitasse à condução, este seria muito ineficiente, dado o baixo valor de condutividade térmica dos tecidos. De facto, o processo mais eficiente de libertação de calor é o correspondente à condução através do sangue. O fluxo sanguíneo transporta calor que é libertado ao nível da superfície da pele através dos capilares que a irrigam. Aliás, quando se pretende que a libertação de calor seja menor, ocorre constrição ao nível dos capilares, reduzindo as trocas térmicas com o exterior. Note-se que a perda de calor para o exterior é feita por qualquer dos mecanismos anteriormente estudados. No entanto, tendo em conta que a condutividade do ar é muito pequena, a perda de calor por condutividade é diminuta, só sendo considerável se uma parte considerável da superfície corporal estiver em contacto com um material com uma boa condutividade térmica (um metal, por exemplo). Caso contrário os dois mecanismos mais importantes de troca de calor entre a pele e o exterior são a convecção e a radiação. No entanto, como facilmente se conclui do que foi exposto na secção 8.4., estes dois mecanismos só são verdadeiramente úteis na dissipação de energia térmica do corpo quando a temperatura do exterior é menor do que a temperatura do interior. Caso contrário, a temperatura corporal é fundamentalmente regulada através da evaporação do suor. Um elevado calor de evaporação da água (cerca de 0.580 kcal g-1) permite uma eficiente perda de calor por esta via. Pode ainda referir-se a perda de calor por evaporação devido à respiração, no entanto, no homem, este mecanismo é diminuto quando comparado com o da transpiração.
64 Assume-se que por cada litro de oxigénio utilizado na oxidação de alimentos, sejam consumidas 4.83 kcal.

104
VIII OS SENTIDOS DA AUDIÇÃO E DA VISÃO
24. Funcionamento do ouvido humano Como se referiu nas secções anteriores, o som é uma onda mecânica, ou seja, a sua propagação ocorre graças à oscilação das partículas do meio. O ouvido humano não é mais do que um eficiente transdutor que transforma essas pequenas alterações de pressão em sinais eléctricos interpretáveis pelo sistema nervoso. Habitualmente, o ouvido humano é dividido em três partes: ouvido externo, ouvido médio e ouvido interno. O primeiro detecta o som e conduze-lo em direcção ao ouvido médio. Este, por sua vez, amplifica-o e faz uma adaptação da impedância acústica entre o ouvido externo e o interno. Por fim, o ouvido interno converte o som em sinais eléctricos dependentes da frequência e da intensidade. No que respeita à sua anatomia (ver Figura 85), no ouvido externo é possível distinguir a orelha, que recolhe os sons e os transmite directamente para o canal auditivo. Este, num adulto médio, tem aproximadamente 0.75 cm de diâmetro e 2.5 cm de comprimento65 e é responsável pela condução do som até ao tímpano. O tímpano é uma membrana móvel muito fina recoberta por pele do lado de fora e por membrana mucosa do lado interno. Como se pode observar, o conjunto orelha e canal auditivo pode ser considerado uma espécie de funil, mais largo na região da orelha e que se estreita à medida que se aproxima do tímpano. Também esta geometria contribui para um ganho em termos de pressão (para a mesma força, diminuindo a área, aumenta a pressão).
Figura 85 - Esquema do ouvido humano. (Adapt. de P. Davidovits, 2001).
65 É interessante verificar que as dimensões deste canal conferem-lhe uma frequência de ressonância na ordem de 3000 Hz (tipicamente a frequência do discurso oral nos humanos), sendo, por este motivo, que o ouvido humano é tão sensível a esta gama de frequências. Embora o estudo de cavidades de ressonância não se enquadre na profundidade do estudo que pretendemos fazer, será útil entender que uma geometria que apresente ressonância numa dada frequência significa que amplifica mais essa frequência do que as restantes.

105
O ouvido médio é constituído por uma cavidade com ar, no interior da qual se encontram três ossículos: martelo, bigorna e estribo. O martelo está ligado ao tímpano, enquanto que o estribo se encontra ligado à janela oval, que estabelece o contacto com o ouvido interno. Este sistema de ossículos tem, basicamente, duas funções: a de adaptar a impedância acústica do ar (existente no ouvido externo) à do fluido existente no ouvido interno e a de amplificar, uma vez mais, a pressão (repare-se que o tímpano apresenta uma área de aproximadamente 65 mm2, enquanto que a área da janela oval é de cerca 3 mm2, o que permite um ganho de 20 a 30 na pressão. No ouvido interno existem ainda dois músculos com um funcionamento muito interessante e que protegem o sistema auditivo contra sons de intensidade excessivamente elevada. O primeiro encontra -se ligado ao tímpano e evita a propagação de sons de frequência muito baixa para os ossículos. O segundo encontra-se ligado à janela oval e reduz a intensidade do som transmitido para o ouvido interno, quando este é demasiado intenso. Este mecanismo, porém, demora cerca de 50 ms a ser activado. Por este motivo, o nosso ouvido encontra-se protegido contra o aumento gradual do som, mas não contra aumentos bruscos da intensidade do som, como, por exemplo, os que ocorrem aquando de uma explosão. Há ainda uma segunda e sofisticada função destes músculos. Sempre que nós falamos, eles são activados com a antecedência necessária para que o som da nossa voz (propagado através dos tecidos da cabeça e de intensidade extremamente elevada) seja fortemente atenuado. O ouvido médio encontra-se, ainda, ligado à trompa de Eustáquio que, por sua vez, se encontra ligado à boca e cuja função é a de manter o ouvido médio à pressão atmosférica.
Figura 86 - Esquema do ouvido médio e do ouvido interno. (Adapt. A.McCormick e A Elliot,
2001).
O ouvido interno é essencialmente uma cavidade no interior do crânio e, portanto, protegida por este, cheia de fluido. É constituído pelo vestíbulo, a cóclea e os canais semicirculares. Os canais semicirculares são os nossos sensores de controlo do equilíbrio. São três tubos cheios de fluido, que formam ângulos rectos entre si (ver Figura 86). Desta forma, movimentos da cabeça são acompanhados de movimentos no fluido medidos por pequenos cílios que se encontram no interior dos canais e que fornecem informação aos nervos sobre esses movimentos. Esses nervos transmitem essa informação ao cérebro de modo a que este inicie os mecanismos necessários para manter o equilíbrio. O vestíbulo é a cavidade que liga a janela oval à cóclea. E a cóclea é um tubo em forma de espira que contém três câmaras distintas: scala vestibuli, o ducto coclear e a scala tympani (ver Figura 87). A scala vestibuli e

106
a scala tympani encontram-se ligadas no ápex da cóclea e contêm o mesmo líquido no seu interior: a perilinfa. A primeira está ligada à janela oval, enquanto que a segunda à janela redonda. O ducto coclear, que se contra, na cóclea, entre as outras duas câmaras, encontra-se cheio de um líquido chamado endolinfa. A separá-lo da scala tympani encontra-se a membrana basilar, recoberta de células sensíveis à vibração. Estas células, conhecidas por células ciliadas devido à sua geometria em forma de cílio, transformam o movimento do fluido em sinais eléctricos que são conduzidos até ao cérebro através do nervo auditivo. Ora o movimento do fluido é determinado pela pressão na janela oval que estabelece a ligação entre os ossículos e o vestíbulo. Não é ainda muito claro o modo exacto de funcionamento da cóclea, no entanto, é conhecido que as células basilares têm uma disposição tal que as que se encontram mais próximas da base da cóclea são sensíveis às frequências mais altas, enquanto que as que se encontram mais próximas do ápex são sensíveis às frequências mais baixas. De referir também o papel da janela redonda, cujo movimento permite dissipar o excesso de energia existente nas ondas de som que se propagam ao longo da cóclea.
Figura 87 - Corte transversal dos três canais da cóclea. (Adapt. A.McCormick e A Elliot, 2001).
24.1 Gama de frequências e sensibilidade do ouvido humano
O normal funcionamento do ouvido humano permite sermos sensíveis a frequências que vão desde 20 Hz até 20 000 Hz nos adultos. É, no entanto, sabido que, com o passar dos anos o limite superior desta gama poderá descer para valores de 15 kHz ou mais baixo. Quanto à sensibilidade o nosso ouvido apresenta também uma fantástica capacidade: geralmente, é possível detectar diferenças de som na ordem de 0.1 % da frequência considerada. Para ter uma noção do que este valor significa repare-se que entre o dó e o ré existe uma diferença de cerca de 6 %. Na verdade, numa gama de frequências entre 60 e 1000 Hz é possível distinguirmos sons separados de 2 a 3 Hz. Para valores de frequência superiores torna-se um pouco mais difícil distinguir frequências que se encontrem tão próximas.
Na Figura 88 apresenta-se um gráfico onde está apresentado o limiar de audibilidade de um indivíduo jovem sem problemas de audição (linha a cheio) em função da frequência. Encontram-se ainda representadas as linhas associadas ao limiar de audibilidade da média dos indivíduos e aos limiares associados ao desconforto e à dor. Assume-se que para valores acima de 160 dB o tímpano pode sofrer ruptura.

107
Figura 88 - Gráfico onde estão apresentados o limiar de audibilidade para um jovem com uma audição normal, o limiar de audibilidade para a média da população, o limiar de intensidade do
som a partir do qual o indivíduo experiência uma sensação de desconforto e aquele em que começa a sentir dor. (Adapt. A.McCormick e A Elliot, 2001).A título de curiosidade, na
Tabela 4 encontram-se apresentados alguns valores típicos de intensidade sonora associados a determinadas situações.
Nível do som (dB)
Situação
0 Som mínimo audível 10 Movimento das folhas das árvores 20 Uma rua com pouco movimento 30 Sussurro 40 Conversação 50 Ruído médio de uma casa 60 Conversação (de um indivíduo para outro que se encontra a 1 m) 70 Ruído no interior de uma loja de grandes dimensões 80 Ruído de uma estrada com grande movimento a 18 m 85 Primeiro nível de perigo 90 Ruído no interior de um camião ou de um metropolitano
100 A 8 m de um camião numa rua estreita 110 A 1 m de um grupo rock ou a 15 m de um apito de comboio. 120 A 175 m de um avião 130 A 35 m de um avião a jacto
Tabela 4 - Alguns ruídos típicos de diversas situações. Observe-se que um ruído continuado de 85 dB pode já causar danos permanentes. (Adapt. A.McCormick e A Elliot, 2001).
25. Elementos de óptica geométrica As características dos componentes ópticos habitualmente utilizados, tais
como espelhos e lentes, podem ser completamente obtidas a partir das propriedades das ondas anteriormente referidas. No entanto, esses cálculos são geralmente bastante complexos, de modo que na maioria das aplicações, assume-se que: as dimensões desses componentes são muito maiores do que o comprimento de onda da luz (o que é verdade para a maior parte dos casos) e que é possível aproximar um feixe luminoso a um conjunto de raios que se mantêm perpendiculares à frente de onda (ver Figura 89). Nestas condições, admite-se que um raio luminoso num meio homogéneo tem sempre uma trajectória rectilínea, só apresentando desvios quando encontra uma interface

108
entre dois meios. Aos cálculos realizados utilizando estas aproximações dá-se o nome de óptica geométrica.
Figura 89 - Representação da aproximação feita em óptica geométrica, onde as frentes de onda
de um feixe luminoso são descritas através de um conjunto de raios que se propagam perpendicularmente à frente de onda. (Adapt. de P. Davidovits, 2001).
25.1 Índices de refracção, Lei de Snell e ângulo crítico
Como já se referiu anteriormente, o modo de propagação de uma onda altera-se quando atravessa uma interface entre dois meios. Nomeadamente, altera a sua velocidade de propagação. Tomando o caso da luz, como é sabido, no vácuo, a velocidade de propagação tem o valor 3 x 108 m s-1. No entanto, em qualquer outro meio material, a velocidade da luz toma um valor menor e que cumpre a relação:
n
cv = ,
equação 87
onde v é a velocidade da luz no meio considerado, c a velocidade da luz no vazio e n o índice de refracção do meio, necessariamente maior do que 1. Definido o índice de refracção de um material é possível estabelecer as relações existentes entre o ângulo de incidência, θ1, de um raio numa interface e o ângulo de refracção, θ2, através da Lei de Snell:
1
2
2
1
sen
sen
n
n=
θθ
,
equação 88
n1 tem o significado de índice de refracção do primeiro meio e n2 o índice de refracção do segundo meio. Na Figura 90 encontram-se representadas duas situações distintas. Na alínea a) um caso em que o índice de refracção do meio 2 e maior do que o índice de refracção do meio 1 (por exemplo, um raio de luz que atravessa uma interface ar/água). Já na alínea b) a situação ilustrada é a de no meio 2 existir um índice de refracção menor do que no meio 1, verificando-se, portanto, θ1 menor do que θ2. Neste segundo caso, observa-se que existe um ângulo de incidência a partir do qual deixa de existir refracção. Ou seja, para esse ângulo crítico, a refracção é tangente à interface e para valores superiores a esse ângulo existe reflexão total do raio.

109
a) b)
Figura 90 - a) Representação do raio incidente, reflectido e refractado quando passa de um meio com um índice de refracção menor para outro com um índice de refracção maior. b)
Representação da trajectória dos raios quando o índice de refracção do meio 1 é maior do que o índice de refracção do meio 2. A tracejado encontra-se o raio incidente e o raio refractado numa situação em que o ângulo de incidência é menor do que o ângulo crítico. A cheio a situação em que o ângulo de incidência é maior do que o ângulo crítico. (Adapt. de P. Davidovits, 2001).
25.2 Lentes
Existem, basicamente, dois tipos de lentes: as convergentes e as divergentes. Relativamente à sua geometria, as primeiras são convexas e as segundas côncavas. Nas lentes convexas verifica-se que, quando um feixe de raios paralelos passa pela lente, converge num único ponto o foco a uma determinada distância da lente distância focal, f (ver Figura 91). Invertendo a situação, verifica-se que se a lente for atravessada por um conjunto de raios provenientes de uma fonte pontual colocada num ponto à distância focal da lente, esse feixe transforma-se num conjunto de raios paralelos.
Figura 91 - Representação da trajectória de um feixe de luz a) paralelo, b) proveniente de uma fonte pontual ao atravessar uma lente convergente. Ilustração do conceito de distância focal.
(Adapt. de P. Davidovits, 2001).

110
No caso das lentes divergentes, verifica-se que, quando um feixe de raios paralelos atinge a lente, estes passam a ser divergentes, aparentando provirem de uma fonte pontual (ver Figura 92). Neste caso, chama-se foco a essa fonte virtual e, analogamente ao que se passa com as lentes convergentes, denomina-se distância focal à distância entre esse ponto e a lente.
Figura 92 - Representação da trajectória de um feixe de luz paralelo ao atravessar uma lente
divergente com indicação da sua distância focal. (Adapt. de P. Davidovits, 2001).
A distância focal de uma lente é determinada através do índice de refracção do
material de que é constituída e do seu raio de curvatura. Convencionando-se que a luz se propaga da esquerda para a direita e que uma lente apresenta um raio de curvatura positivo quando a superfície com que o raio se depara é convexa e negativo quando essa superfície é côncava, a distância focal, f, de uma lente fina é dada por:
( )
−−=
21
111
1
RRn
f,
equação 89
onde n é o índice de refracção da lente, R1 o raio de curvatura da primeira superfície e R2 o raio de curvatura da segunda (repare-se que no caso de uma lente convexa como a apresentada na Figura 91, R1 é positivo, enquanto que R2 é negativo).
A potência de uma lente é tanto maior quanto menor for a distância focal, sendo definida através da expressão:
f
1focalpoder = ,
e expressa em dioptrias (m-1). Em muitas situações práticas são utilizadas várias lentes em série. Quando as
lentes se encontram encostadas, é possível obter a distância focal do conjunto através da expressão:
21
111
fffT
+= .
Quando uma fonte pontual (objecto) é colocada num ponto a uma distância de uma lente convergente maior do que a distância focal, os raios de luz, após atravessarem a lente, convergem para um ponto ao qual chamamos imagem real (ver Figura 93 a)). Quando o objecto é colocada num ponto mais próximo da lente do que o foco, os raios provenientes do objecto divergem e a imagem diz-se virtual, uma vez que aparece do lado onde o próprio objecto se encontra (ver Figura 93 b)).

111
Figura 93 - Representação da trajectória de um feixe de luz proveniente de uma fonte pontual ao atravessar uma lente convergente, quando a) a distância do objecto à lente é superior à distância focal (imagem real), b) a distância do objecto à lente é menor do que a distância focal (imagem
virtual). (Adapt. de P. Davidovits, 2001).
Numa lente fina é possível relacionar a distância entre o objecto e a lente, p, a
distância entre a imagem e a lente, q, e a distância focal, f, através da relação:
qpf
111+= .
Por convenção, q é considerado positivo quando a imagem é formada do lado da lente contrário ao lado do objecto e negativo quando o objecto e a imagem se encontram do mesmo lado da lente.
É também de enorme interesse prático perceber o que é que acontece quando o objecto é colocado não sobre o eixo da lente, como nos casos dos esquemas da Figura 93, mas a uma determinada distância desse eixo, como mostra a Figura 94. Neste caso, a razão entre a distância ao eixo da imagem, y, e a distância ao eixo do objecto, x, é igual à razão entre a distância da imagem à lente, q, e a distância do objecto à lente, p:
p
q
x
y= .
Figura 94 - Representação da trajectória de um feixe de luz proveniente de uma fonte pontual que se encontra a uma determinada distância do eixo óptico. (Adapt. de P. Davidovits, 2001).

112
Apesar de, até agora, as situações abordadas corresponderem apenas a
objectos pontuais, é muito simples generalizar para os casos em que os objectos são extensos. Na verdade, basta pensarmos que cada ponto do objecto se comporta como uma fonte pontual. Desta forma, o formalismo descrito anteriormente é aplicável a qualquer objecto, cumprindo-se, obviamente:
p
q−=
objecto do altura
imagem da altura.
Para terminar esta breve introdução à óptica geométrica, parece-nos oportuno discutir o que acontece quando uma lente, ao invés de estar mergulhada no ar66, se encontra mergulhada em dois meios distintos, como o representado na Figura 9567. Sejam n1 o índice de refracção do meio de onde provêm os raios de luz, n2 o índice de refracção do meio do outro lado da lente, nL o índice de refracção do material constituinte da lente, R1 e R2, respectivamente o primeiro e o segundo raios de curvatura da lente, p a distância do objecto à lente e q a distância da imagem à lente, então, é válida a expressão:
2
2
1
121
R
nn
R
nn
q
n
p
n LL −−
−=+ .
Para a mesma situação, é possível definir a distância focal efectiva, f, da lente, através da relação:
2
2
1
121
R
nn
R
nn
f
L −−−
= .
Figura 95 - Representação de uma lente convergente mergulhada entre dois meios de diferentes
índices de refracção. (Adapt. de P. Davidovits, 2001).
26. A visão humana A visão é, indubitavelmente, um sentido de extrema importância para observar
o que nos rodeia. Estima-se que 70% da informação sensorial recolhida por um indivíduo seja através da visão. Em traços gerais, é possível dividir a visão em três componentes distintas: o estímulo, que consiste nos raios de luz que atingem o olho; os elementos ópticos que constituem o próprio olho e o sistema nervoso que processa e interpreta a informação recolhida.
66 Note-se que em todos os casos discutidos nesta secção se presume que as lentes se encontram no ar, ou seja, assume-se que o índice de refracção do meio onde a lente está mergulhada é 1. 67 É de referir que esta situação se reveste de especial interesse, uma vez que representa com rigor o que se passa ao nível do olho.

113
Além do mais, é interessante realçar algumas das mais notáveis potencialidades do olho humano: 1) combina a possibilidade de observar eventos numa larga gama de ângulos, com uma extrema acuidade no que respeita a um objecto que se encontre exactamente à sua frente; 2) apresenta a possibilidade de adaptar a distância focal e proceder à limpeza da lente de um modo rápido e automático; 3) consegue operar numa extensa gama de intensidades luminosas (cerca de 7 ordens de grandeza diferentes); 4) a córnea possui uma enorme capacidade de reparação dos tecidos de que é constituída; 5) regula de um modo extremamente eficiente a pressão no seu interior; 6) ao nível do processamento cerebral, a informação recolhida por cada um dos olhos é utilizada para fornecer informação tri-dimensional. Por estes motivos, o estudo do funcionamento do olho humano tem ocupado tanto os cientistas, permanecendo algumas das funções mais sofisticadas, principalmente, ao nível do processamento, ainda por explicar.
26.1 Estrutura e funcionamento do olho
Através de um esquema simples do olho humano (Figura 96), é possível distinguir as suas principais estruturas. A sua forma é praticamente esférica e possui um diâmetro com cerca de 2.4 cm. A luz atravessa a córnea que é um tecido transparente que se encontra na parte anterior do olho. A córnea apresenta um índice de refracção muito diferente do correspondente ao ar (ver Tabela 5), pelo que impõe aos raios luminosos uma significativa refracção. Em seguida, a luz atravessa uma região no interior da qual se encontra o humor aquoso, formado maioritariamente por água, na qual se encontram dissolvidos alguns sais. Neste compartimento encontra-se a íris (região colorida do olho) que delimita um orifício (a pupila) por onde passam os feixes luminosos e que pode ter diâmetros que vão desde 2 mm até 8 mm. É, pois, a íris que controla a quantidade de luz que o olho recebe, determinando as dimensões da pupila que funciona como diafragma. Os raios luminosos atravessam, então, a lente ou cristalino que se encontra protegida por uma cápsula e que é responsável pela focagem dos objectos na retina. Esse processo de focagem, ou acomodação, que, como se observou anteriormente, é automático está a cargo dos músculos ciliares que se encontram ligados à lente através de ligamentos. Quando estes músculos se encontram relaxados a lente apresenta-se com o seu máximo diâmetro e menor espessura, estando na posição apropriada para focar na retina objectos provenientes de grandes distâncias (assume-se que neste caso os raios provenientes desses objectos são paralelos uns aos outros). Pelo contrário, quando os músculos ciliares se contraem, os ligamentos exercem menor pressão sobre a lente, esta relaxa e apresenta um menor diâmetro e uma maior espessura, ou seja, torna-se apta a focar na retina objectos que se encontrem próximos do indivíduo.
Componentes do olho humano Índice de refracção Córnea 1.37 Humor aquoso 1.33 Superfície das lentes 1.38 Interior das lentes 1.41 Humor vítreo 1.33
Tabela 5 - Índices de refracção de diversas componentes do olho humano. (Adapt. A.McCormick e A Elliot, 2001).

114
Figura 96 - Esquema da estrutura do olho humano. (Adapt. A.McCormick e A Elliot, 2001).
Após atravessar o cristalino, a luz propaga-se através de uma cavidade cheia
de humor vítreo, que é uma substância gelatinosa que confere a geometria esférica ao olho. Uma vez chegada à retina, região posterior do olho e onde se encontram os receptores da luz) os raios luminosos são transformados em sinais eléctricos através dos bastonetes e dos cones, células nervosas que funcionam como transdutores. Os primeiros são especializados em detectar diferentes quantidades de luz e encontram-se principalmente na periferia da retina. Os cones são sensíveis a três cores: vermelho, verde e azul, e permitem-nos ter a percepção de todas as restantes, através de combinações pesadas de cada uma destas três. Estão densamente distribuídos na região central da retina, mais próxima do eixo óptico do olho (analisar a Tabela 6).
Propriedades Bastonetes Cones Respondem a: luz fraca luz intensa Apresentam a sua máxima sensibilidade ao comprimento de onda:
azul-verde (500 nm)
verde-amarelo (560 nm)
Apresentam uma resolução espacial: baixa alta Quanto à visão a cores: não apresentam são necessários, pelo menos, dois
tipos de cones Tempo de adaptação à escuridão: cerca de 15 minutos cerca de 5 minutos
Tabela 6 - Algumas propriedades apresentadas pelos bastonetes e pelos cones. (Adapt. A.McCormick e A Elliot, 2001).
No que respeita à estrutura da retina é importante referir ainda dois aspectos: o
primeiro é a existência de uma manha amarela, a mácula lútea, situada no eixo óptico e no centro da qual se encontra uma importante área à qual se dá o nome de fóvea. A fóvea é a região da retina com maior densidade de cones, permitindo, por isso, uma extrema clareza da imagem projectada nessa zona. Para ilustrar a acuidade desta região, basta chamar a atenção para a densidade de cones na área central da fóvea que é cerca de 150 000 cones por mm2. O segundo aspecto, é a existência de uma região da córnea que não possui bastonetes ou cones, e, por esse motivo, denominada de região cega, uma vez que é nesse local que se reúnem todas as fibras nervosas provenientes da retina para formar o nervo óptico, que, por sua vez, envia, para o cérebro, toda a informação visual recolhida.

115
BIBLIOGRAFIA
Livro seguido: Physics in Biology and Medicine (2001) Paul Davidovits, 2ª edição, Harcourt Academic Press. Outros livros essenciais: Physics for Scientists and Engineers with Modern Physics (1996), Raymond A. Serway, 4ª edição, Sauders College Publishing. General Physics with Bioscience Essays (1985), Jerry B. Marion e William F. Hornyak, 2ª edição, John Wiley & Sons, Inc.
Physics (1988), Kane e Sternheim, 3ª edição, John Wiley & Sons, Inc.
Contemporary College Physics (1992) Edwin R. Jones e Richard L. Childers, 2ª edição, Addison-Wesley Publishing Company
Fundamentals of Physics (1993) David Halliday, Robert Resnick e Jearl Walker, 4ª edição, John Wiley & Sons, Inc.
Physics Principles with Applications (1991) Douglas C. Giancoli, 3ª edição, Prentice_Hall International, Inc.
College Physics (1995) Vincent P. Coletta, Mosby.
Outra bibliografia consultada: Processamento de Dados Electroencefalográficos - aplicações à epilepsia (1998) Carla Silva, tese de Doutoramento apresentada à Universidade de Lisboa. Essentials of Neural Science and Behavior (1995) E.R. Kandel, J.H. Schwartz e T.M. Jessell, Appleton & Lange. Principles of Neural Science (1985) E.R. Kandel e J.H. Schwartz, 2ª edição, Elsevier. Clinical electroencephalography and event-related potentials. In: Functional Brain Imaging (1995), J.D. Lewine e W.W. Orrison Jr. Editores: W.W. Orrison Jr., J.D. Lewine, A.J. Sanders e M.F. Hartshorne, Mosby. Le Cerveau (1984) vários autores, Bibliothèque pour la Science. Principles of Anatomy and Physiology (1996) G.J. Torotora e S.R. Grabowski, Harper Collins College Publishers. Principles of Behavioral Neuroscience (1995) J. Beatty, Brown & Benchmark. Textbook of Medical Physiology (1996) A.C. Guyton e J.E. Hall, 9ª edição, Saunders.

116
Human Physiology (1998) A. Vander, J. Sherman e Dorothy Luciano, 7ª edição, WCB McGraw-Hill. Medical Imaging Physics (1979), William R. Hendee e E. Russell Ritenour, 3ª edição, Mosby Year Book. Health Physics (2001), A. McCormick e A. Elliot, Editor: David Sang, Cambridge University Press.

117
Z
X
Y
Az
Ax
Ay
θ
ϕ
ANEXO A – Revisão de alguns conceitos de cálculo vectorial
Como foi estudado em anteriores níveis de escolaridade Um vector é caracterizado por uma amplitude, uma direcção e um sentido, ao contrário de um escalar que é definido apenas por um número (amplitude e, eventualmente, uma unidade). Ou seja, a distância percorrida, a temperatura e a massa são exemplos de escalares, enquanto que o deslocamento, a velocidade e a força são exemplos de vectores.
Sempre que é necessário localizar pontos no espaço, é necessário usar um sistema de coordenadas que envolve: uma origem (ponto fixo); um sistema de eixos e instruções para definir um ponto relativamente à origem e aos eixos. No sistema de coordenadas cartesianas (que é aquele que se torna mais intuitivo aos nossos sentidos)
é possível descrever um vector Ar
esquematicamente:
Figura 97 – Representação de um vector no espaço.
Ou analiticamente: zzyyxx uAuAuAArrrr
++= , onde xA , yA e zA são as
coordenadas do vector e estão representadas na Figura 97. Relativamente às características dos vectores é ainda essencial lembrar que
dois vectores são iguais se tiverem a mesma amplitude, direcção e sentido e que a adição de dois vectores BAR
rrr+= segue as regras gráficas do triângulo ou do
paralelograma (ver Figura 98, que podem ser usadas indiscriminadamente, consoante o gosto do aluno.
Regra do triângulo: Regra do paralelograma:
Figura 98 – Representação gráfica da regra do triângulo e da regra do paralelograma na adição de vectores
rA
rR
rA
rB
rR
rA
rB

118
É também sabido que a adição de vectores é comutativa, ou seja:
ABBArrrr+=+ e associativa: )()( CBACBA
rrrrrr++=++ . E que o vector A
r− é o vector
que tem a mesma amplitude e direcção que Ar
, mas sentido contrário:
Ar A
r−
Figura 99 – Representação do simétrico de um vector.
Esta última definição permite usar na subtracção as mesmas regras que na
soma. Ainda com o objectivo de recapitular algumas noções sobre vectores, refira-se
que multiplicar um escalar por um vector equivale a multiplicar a sua amplitude por esse escalar (se o escalar for negativo, o vector resultante tem o sentido contrário ao do vector inicial). E que, atendendo a que um vector pode ser expresso através das suas componentes:
zzyyxx uAuAuAArrrr
++= ,
equação 90 a soma (subtracção) de A
r com B
r pode ser calculada através da expressão:
zzzyyyxxx uBAuBAuBARrrrr
)()()( ±+±+±=
equação 91
O produto interno entre dois vectores é um escalar dado por:
ϑcos. ABBA =rr
equação 92 sendo, A e B, as amplitudes dos vectores e ϑ o menor ângulo entre eles. Ou seja, o
produto interno de Ar
com Br
é a amplitude de Ar
multiplicada pela projecção de Br
em Ar
. Tendo em conta a sua definição é possível demonstrar facilmente que o produto interno é comutativo: ABBA
rrrr.. = , associativo: )..()..( CBACBA
rrrrrr= e distributivo
relativamente à soma: CABACBArrrrrrr
..).( +=+ . Além disso, como facilmente se verifica, o produto interno entre dois vectores paralelos é o produto das suas amplitudes e o produto interno entre dois vectores perpendiculares é zero:

119
BABABA ..// =⇒rrrr
0. =⇒⊥ BABArrrr
.
Temos também que se Ar
e Br
forem descritos como:
zzyyxx uAuAuAArrrr
++= zzyyxx uBuBuBBrrrv
++=
o produto interno ente esses dois vectores é calculado através da expressão:
zzyyxx BABABABA ++=rr
.
equação 93
Um outro conceito importante é o de versor que é definido como o vector unitário relativo a uma dada direcção. Ou seja, o versor do vector A
r tem a expressão:
zz
y
y
xx u
A
Au
A
Au
A
A
A
AA
rr
rr
rrr
rr
vers ++==
equação 94
onde as quantidades A
A
A
A
A
A zyxrrr ; ; são os chamados cossenos directores do vector
Ar
(cosα, cosβ, cosγ).
Quanto ao produto externo de dois vectores é um vector cuja amplitude é dada por:
ϑsenABBA =×rr
equação 95
sendo, A e B, as amplitudes dos vectores e ϑ o menor ângulo entre eles.
Quanto à sua direcção sabe-se que se: BACrrr×= , então: BAC
rrr e ⊥
Como propriedades importantes do produto vectorial pode apontar-se:
1. )( ABBArrrr×−=×
2. 0// =×⇒ BABArrrr
3. BABABA .=×⇒⊥rrrr
4. É distributivo relativamente à soma:
CABACBArrrrrrr×+×=+× )(

120
Para estabelecer o produto externo entre dois vectores arbitrários é útil ter-se presente que as coordenadas cartesianas cumprem as seguintes regras:
yzxxz
xyzzy
zxyyx
zzyyxx
uuuuu
uuuuu
uuuuu
uuuuuu
rrrrr
rrrrr
rrrrr
rrrrrr
=×−=×
=×−=×
=×−=×
=×=×=× 0
Existindo uma regra prática, bastante útil no cálculo do produto externo entre dois vectores que se representa da seguinte forma:
zyxyxyzxxzxyzzy
zyx
zyx
zyx
uABBAuBABAuBABA
BBB
AAA
uuu
BA
rrr
rrr
rr
)()()( −+−+−=
==×

121
ANEXO B – Revisão de alguns conceitos de Mecânica
Cinemática
Nesta revisão sobre os conceitos e as Leis da Mecânica começaremos por incidir o nosso estudo na descrição do movimento, pondo de parte a origem desse movimento, ou seja, iremos abordar apenas a cinemática. Ir-se-á ainda considerar objectos pontuais, iniciando o estudo a uma dimensão. Comece-se por recordar a definição de algumas grandezas importantes.
Dá-se o nome de deslocamento (∆x) de uma partícula num determinado intervalo ∆t à diferença entre a sua posição final e a sua posição inicial: ∆x = xf – xi. A uma dimensão o deslocamento não é mais do que a distância entre os dois pontos, ou seja, a distância entre o ponto de chegada (xi) e o ponto de partida (xf), sendo, obviamente, a sua unidade de SI o metro (m). Quanto à velocidade média define-se como a razão do deslocamento pelo intervalo de tempo, ( v ):
if
if
tt
xx
t
xv
−
−=
∆∆= ,
equação 96
tendo unidades de m s-1. Tendo em conta esta definição, é de notar que a velocidade média é independente do percurso. Deste modo, se a posição final for igual à posição inicial, a velocidade média é nula, ainda que se possa ter percorrido um determinado caminho. De facto, a grandeza que contém informação sobre o caminho percorrido é a
celeridade (ou rapidez) média ( cel ), também em unidades m s-1:
totaltempo
percorrido caminhocel ≡ .
equação 97
Repare-se, no entanto, que tanto a velocidade média, como a celeridade média, não dão informação sobre as variações de velocidade (ou celeridade) ao longo do percurso. Por este motivo, surge a necessidade de introduzir uma nova grandeza à qual se dá o nome de velocidade instantânea, definida matematicamente através da expressão:
dt
dx
t
xv
t=
∆∆
≡→∆ 0
lim .
equação 98
Ou seja, num gráfico em que a posição segundo a direcção de x for representada em função do tempo, a velocidade instantânea será a tangente a esse gráfico, ver Figura 100. Quanto à celeridade instantânea será definida pelo valor absoluto da velocidade instantânea.

122
Figura 100 – Representação gráfica da posição de uma partícula em função do tempo, considerando um movimento a uma dimensão. Encontram-se representados o deslocamento, a
velocidade instantânea (a cheio) e a velocidade média (a tracejado).
Uma outra grandeza importante em cinemática é a aceleração, ou seja, a taxa com que a velocidade se altera. Também neste contexto é possível definir aceleração média, a , (em m s-2 no SI):
if
if
tt
vv
t
va
−
−=
∆∆= ,
equação 99
onde vf tem o significado de velocidade final (no instante tf) e vi tem o significado de velocidade inicial (no instante ti)
Quanto à aceleração instantânea, a, é dada por:
2
2
0lim
dt
xd
dt
dv
t
va
t==
∆∆
≡→∆
,
equação 100
que será a tangente ao gráfico velocidade instantânea em função do tempo. Neste ponto é de referir um movimento especial como aquele em que a aceleração é constante, ou seja, aquele em que a aceleração média coincide com a aceleração instantânea. Nesse caso, tem-se:
atvvt
vva
t
vaaa if
if +=⇔−
=⇔∆∆=⇔= .
equação 101
Nestas condições de aceleração constante, a velocidade varia uniformemente e, portanto, a velocidade média, pode ser dada por:
P
Q
v v
X
t
∆x

123
2fi vv
v+
= .
equação 102
Sendo a expressão do deslocamento dada por:
2
2
1)(
2
1)(
2
1attvxxtatvvtvvtvx iiiifi ++=⇔++=+=∆=∆
equação 103
Eliminando a variável tempo através das equação 101 e equação 103, obtém-se a expressão:
)(222iif xxavv −=− .
equação 104
É ainda desejável referir-se como é que, nestas condições, estas grandezas são representadas no tempo: num gráfico de aceleração em função do tempo, esta é representada como uma linha horizontal, a velocidade (que varia uniformemente), através de uma linha oblíqua e o deslocamento (que depende do quadrado do tempo) é representado por uma parábola. Um outro caso interessante de se discutir é aquele em que a aceleração é nula. Nestas condições, as equações anteriores tomam aspectos mais simples:
tvxxvcv ii
te +=== i e .
equação 105 Uma das aplicações mais imediatas ao formalismo que foi introduzido anteriormente é o de descrever o movimento de corpos em queda livre. Como é sabido desde Galileu, os corpos em queda livre são animados de uma aceleração constante, assumindo-se que esta é aproximadamente g = 9.8m/s2, embora seja ligeiramente dependente da altitude e da latitude.
Assim, adaptando as equações já obtidas para o caso da aceleração constante e assumindo que o sentido positivo dos eixos é de baixo para cima (ou seja, a aceleração é negativa), obtém-se:
2
2
1gttvx i −=∆ e gtvv i −= .
equação 106
Usando estas equações, facilmente se prova que, quando um corpo é lançado de baixo para cima com uma velocidade v0 demora v0/g a atingir a altura máxima, h, que é dada por:

124
g
vh
2
20= .
equação 107
Ou seja, demora 2v0/g a regressar ao solo com uma velocidade – v0. Como última nota relativamente a movimentos apenas a uma dimesão, deve ter-se presente que o deslocamento de uma partícula pode ser calculado a partir de um gráfico de velocidade/tempo, determinando a sua área, ou, o que é o mesmo, calculando o seu integral:
∫=∆f
i
t
t
dttvx )( .
equação 108
Todos os conceitos até agora referidos podem ser generalizados para o espaço tridimensional, ou seja, considerando os três eixos cartesianos. Neste caso, o deslocamento, r
r∆ , a velocidade media, v
r, a velocidade instantânea, v
r, a aceleração
média, ar
, e a aceleração instantânea, ar
, são quantidades vectoriais e têm que ser reescritas como tal:
if rrrrrr−≡∆
if
if
tt
rr
t
rv
−
−=
∆∆≡
rrrr
dt
rd
t
rv
t
rrr
=∆∆
≡→∆ 0
lim dt
vd
tt
vva
if
if
rrrr
=−
−≡
dt
vd
t
va
rrr
=∆∆
≡→∆ 0t
lim .
Tendo em conta estas definições repare-se em algumas questões: 1) ∆rr tem
que ser, necessariamente menor ou igual ao caminho percorrido; 2) se ra for nulo, a
amplitude e sentido de rv têm que ser necessariamente constantes; 3) e se
ra for
constante, temos:
seja: zyx uzuyuxrrrrr
++= ,
então: zzyyxxzyx uvuvuvudt
dzu
dt
dyu
dt
dx
dt
rdv
rrrrrrr
r++=++== .
Ora admitindo que ar
é constante, significa que cada uma das suas
componentes é constante: xa = conste, ya = conste e za = conste. E, portanto, podemos
aplicar as leis da cinemática anteriormente deduzidas, a cada uma das dimensões:
tavvtavvtavv zzizyyiyxxix +=+=+= .
Ou seja:
( ) ( ) ( )( ) ( ) tavvtuauauauvuvuv
utavutavutavv
izzyyxxzziyyixxi
zzziyyyixxxi
rrrrrrrrr
rrrr
+=⇔+++++
=+++++=,
equação 109

125
que é uma extensão da expressão deduzida anteriormente para uma dimensão. Do mesmo modo, para a equação da posição é válido:
222
2
1
2
1
2
1tatvzztatvyytatvxx zziiyyiixxii ++=++=++=
. Ou, em formalismo vectorial:
200 2
1tatvrrrrrr
++= .
equação 110
Dinâmica
Nesta segunda parte deste anexo, admitindo que já se está familiarizado com a forma de descrever movimentos tanto a uma como a três dimensões, passar-se-á para a parte da Mecânica que procura compreender a origem dos movimentos: a Dinâmica. E neste âmbito, as três Leis de Newton são inevitáveis para cumprir esses objectivos. Comece-se por definir força como uma grandeza vectorial responsável pelas alterações de velocidade a que os objectos são sujeitos ou pelas deformações nos corpos (permanentes ou não), sendo a sua unidade SI o Newton (N ≡ kg m s-2). A forma mais simples de medir forças é utilizando molas que respeitam a Lei de Hooke, ou seja, aquelas cuja deformação é directamente proporcional à força que lhe é aplicada, dando-se o nome de dinamómetro a estes dispositivos. As Leis de Newton, como é do conhecimento geral, estabelecem precisamente os efeitos da aplicação de forças em corpos não deformáveis. E a primeira delas, também chamada Lei da Inércia enuncia que um objecto em repouso ou com velocidade constante mantém-se no seu estado de movimento, a menos que lhe seja aplicada uma força. I.e. a tradução matemática da Primeira Lei de Newton resume-se à expressão:
∑ =⇒= 00rrrr
aF .
Equação 111
Neste ponto é importante compreender que a resistência que cada objecto opõe à mudança do seu estado de movimento (inércia) é uma característica individual e é mensurável. Na verdade, a massa é uma medida da inércia e tem como unidade SI o kilograma (kg). De facto, verifica-se que quanto maior é a massa de um objecto, maior é a sua oposição à alteração do estado de movimento (alterações na velocidade), ou seja, menor será a aceleração adquirida ao lhe ser aplicada uma força. É de fazer notar que, por vezes, na linguagem comum, elabora-se na confusão entre as grandezas massa e peso. Deve-se ter sempre em atenção que o peso de um corpo é a força que a Terra exerce sobre esse corpo (é, portanto, uma grandeza vectorial e que depende do corpo e da própria Terra), enquanto que a massa é uma grandeza escalar e dependente apenas do corpo. Estas elucubrações acerca da massa conduzem à Segunda Lei de Newton que afirma que a aceleração adquirida por um objecto é directamente proporcional à força que lhe está aplicada e inversamente proporcional à massa desse objecto. Ou, matematicamente:

126
=
=
=
⇔=
∑∑∑
∑z
i
iz
y
i
iy
x
i
ix
i
i
maF
maF
maF
amF
,
,
,
rr
.
Equação 112
Na sequência desta discussão, repare-se em duas questões pertinentes: a primeira é que matematicamente a primeira Lei de Newton torna-se uma consequência da segunda lei; a segunda questão prende-se com a definição de peso que, aplicando esta lei à queda de graves, se obtém através da expressão:
gmPrr
= .
Equação 113
Por fim, a Terceira Lei de Newton, rege a forma como um corpo reage à aplicação de uma força por parte de outro. Esta lei afirma que se dois corpos interagem, a força exercida no corpo 1 pelo corpo 2 é igual em amplitude e tem o sentido oposto à força exercida pelo corpo 2 no corpo1:
1,22,1 FFrr−= .
Equação 114
Uma das curiosidades desta lei é o facto de não existirem forças isoladas, ocorrendo sempre aos pares, ainda que aplicadas em corpos diferentes.
Repare-se que até este momento tem-se ignorado a resistência ao movimento devido à interacção de um corpo com o seu ambiente. A este tipo de força dá-se o nome de força de fricção ou de atrito. Na verdade, relativamente às forças de atrito distinguem-se dois tipos: o atrito estático, fe, (aquele que corresponde à situação em que o corpo ainda não iniciou o seu movimento) e o atrito dinâmico ou cinético, fd, (aquele cujos efeitos surgem após o corpo ter iniciado o movimento). Em ambos os casos se observou experimentalmente que, para velocidades consideradas baixas (pelo menos da ordem de grandeza das que estão presentes nos laboratórios de Física Básica), a força de atrito é proporcional à força normal, N, que actua sobre o corpo, cumprindo-se:
NfNf ddee µµ == e ,
equação 115
a µe dá-se o nome de coeficiente de atrito estático, enquanto que a µd o de coeficiente de atrito dinâmico ou cinético, ambos adimensionais. Verifica-se ainda que, em geral:
de µµ > ,

127
e assume-se que nos exemplos estudados estes coeficientes são independentes da área de contacto do objecto com a superfície entre a qual existe atrito. Embora o formalismo newtoniano seja muitíssimo poderoso para resolver a maioria dos problemas simples que envolvem forças, mesmo situações pouco complexas, são, por vezes, mais facilmente explicadas através de uma abordagem energética. Por este motivo, irão introduzir-se alguns tipos de energia mecânica, cuja unidade é o joule, J (N m).
Principie-se por definir trabalho, W, realizado por uma força constante, Fr
, ao longo de um percurso r
r através da expressão:
cos. ϑFrWrFW =⇔=rr
,
equação 116
sendo ϑ é o ângulo entre Fr
e rr
. Repare-se que o trabalho pode ser encarado como transferência de energia para um determinado sistema (positivo quando se trata de transferência para esse sistema, negativo quando se trata de transferência do sistema para a sua vizinhança). Generalizando o conceito de trabalho segundo um determinado percurso segundo x realizado por uma força que pode ser variável, obtém-se a expressão:
W F dxx
x
x
i
f
= ∫ ,
equação 117
que é a área do gráfico Fx em função de x:
x
Fx
Figura 101 – Ilustração do conceito de trabalho como a área subjacente ao gráfico da força segundo uma dada direcção em função da distância percorrida nessa direcção.
Se se considerar uma força constante aplicada a uma partícula, prova-se que é
válida a expressão:

128
( )W m v vf i
= −1
22 2
,
equação 118
onde vf e vi têm o significado de velocidade final e inicial, respectivamente. E se se definir energia cinética como a quantidade:
E mvc ≡1
22
.
equação 119
Então, a equação 118 pode ser escrita sob a forma:
W E E Ecf ci c
= − = ∆ ,
equação 120
onde os índices f e i denotam, novamente, o estado final e inicial.
Aliás, pode verificar-se que a equação 120 é válida também para forças variáveis aplicadas a partículas. Além disso, repare-se que o trabalho transferido para uma partícula é totalmente transformado em energia cinética porque a partícula não tem massa e, portanto, não pode ser transferido, por exemplo, para deformar o corpo. E porque não foram consideradas forças de atrito.
Uma grandeza importante nesta discussão é a taxa a que o trabalho é realizado potência. A potência média é definida como (com unidades de watt - W):
PW
t≡∆
.
equação 121
Enquanto que a potência instantânea é dada por:
vFdt
rdF
dt
dW
t
WP
t
rrr
r.lim
0===
∆=
→∆.
equação 122
Finalmente, falta referir uma importante forma de energia: a energia potencial. A energia potencial mecânica de um objecto está relacionada com a sua posição e é uma energia latente que pode, a qualquer momento, ser transformada numa outra forma de energia (como aliás, todas as outras formas de energia…).
Facilmente se observa que o trabalho realizado pela força gravítica quando um objecto de massa, m, cai de uma altura yi para uma altura yf é dada por:
W mgy mgyf i
= − .
equação 123

129
Se, analogamente ao que fizemos com a energia cinética definirmos energia potencial através da expressão:
E mgyp≡ ,
equação 124
a equação 123 pode tomar a forma:
W Ep
= −∆ .
equação 125
Repare-se que a variação da energia potencial só depende da altura inicial e da
altura final (é independente da inclinação do percurso). E esta constatação conduz a um outro conceito importante que é o de força conservativa. As forças dizem-se conservativas se o trabalho realizado por elas for independente do percurso. Por exemplo, a força gravítica ou a força realizada por uma mola são conservativas. Já as forças de atrito são não conservativas. Na verdade, as energias potenciais (mecânicas ou outras) só são definidas para forças conservativas e, nesse caso, é válida a equação 125: A noção de força conservativa permite enunciar uma importante lei da Mecânica: “Num sistema isolado em que os objectos só interajam através de forças
conservativas, é válida a conservação da energia mecânica”. Em que a energia mecânica é a soma da energia cinética e da energia potencial. Traduzindo matematicamente:
E E E cM c p
te= + = .
equação 126
Há ainda um conjunto de situações, nomeadamente aquelas que dizem respeito às colisões entre objectos, em que as leis de Newton não são facilmente aplicáveis, por este motivo, desenvolveu-se uma outra abordagem que se baseia na definição de momento linear ou quantidade de movimento, p
r, com unidades de kg m s-1:
vmprr
= ,
equação 127
onde m é a massa da partícula e rv a sua velocidade.
Aplicando a segunda lei de Newton e utilizando esta definição, verificamos que:
r rr r
F ma mdv
dt
dp
dt= = =
equação 128

130
o que significa que o momento linear de uma partícula se mantém constante quando a resultante das forças que lhe estão aplicadas é nula. Além disso, aplique-se também a terceira lei de Newton a um sistema isolado constituído por duas partículas. Neste caso obtém-se:
r r r r r rF F
d
dtp p p p c te
12 21 1 2 1 20= − ⇔ + = ⇔ + =( ) ,
equação 129
o que significa que o momento linear se mantém constante quando duas partículas isoladas não carregadas, interagem.

131
ANEXO C – Cálculo de um ângulo de um triângulo conhecendo dois lados e um outro ângulo Num triângulo qualquer de lados a, b e c e ângulos α, β e γ, como mostra a figura: Cumprem-se as relações, conhecidas pela Lei dos Cossenos:
γ
β
α
cos2
cos2
cos2
222
222
222
baabc
caacb
bccba
−+=
−+=
−+=
Seja a, por exemplo, o comprimento do braço (30 cm), b a distância entre a articulação e o ponto de contacto do músculo (4 cm) e γ o ângulo entre o braço e o antebraço, usando a 3ª relação, obtém-se, c, o comprimento do músculo na posição indicada:
cm 95.30º100cos3042304cos2 2222 =×××−+=−+= γbaabc .
Em seguida, com base neste resultado, é possível encontrar o ângulo α, que corresponde ao ângulo θ da figura 6, ou seja, o ângulo formado pelo antebraço e o músculo, através da 1ª relação:
º7.7295.3042
3095.304arcos
2arcos
2coscos2
222
222222222
=
××−+
=
−+=⇔
−+=⇔−+=
α
αααbc
acb
bc
acbbccba
.
a
b c α
β γ

132
ANEXO D – Alguns conceitos essenciais sobre a estrutura atómica da matéria
Breve contextualização histórica do aparecimento dos modelos atómicos
No dealbar do século XX, poder-se-á afirmar que existiam quatro grandes áreas na Física, que se encontravam bem fundamentadas e que, por isso, chegaram até à actualidade sem sofrerem alterações significativas: A Mecânica Clássica, tal como a conhecemos hoje, e que foi magistralmente estabelecida pelas três leis de Newton (1643-1727). O Electromagnetismo, com a sua elegante formulação sugerida por Maxwell (1831-1879). A Termodinâmica, cujo desenvolvimento contou com cientistas como Thomson (1753-1814), Joule (1818-1889) ou Kelvin (1824-1907), e permitiu o surgimento de duas das mais importantes leis que regem o Universo a 1ª Lei da Termodinâmica, que estabelece a conservação da energia e a 2ª Lei que estabelece as regras segundo as quais ocorrem transformações de energia. E a Física Estatística, que terá aparecido fundamentalmente na segunda metade do século XIX com o objectivo de compreender os fenómenos termodinâmicos com base nos efeitos macroscópicos do comportamento das partículas invisíveis constituintes da matéria. Na verdade, no final do século XIX pouco mais se sabia sobre a estrutura da matéria à excepção da existência de partículas negativas (e, consequentemente, de partículas positivas, uma vez que a matéria era neutra) de modo que os primeiros modelos atómicos eram bastante especulativos. No entanto, incrivelmente, tendo em conta o equipamento da época e os recursos existentes, depressa se convergiu para modelos que, na sua essência têm muitos pontos em comum com os actuais modelos aceites pela Ciência.
Os modelos atómicos O modelo de “Pudim de Passas” de Thomson - O primeiro modelo atómico deste século foi imaginado por Thomson e ficou conhecido como o modelo de “pudim de passas”, uma vez que era constituído por uma pequena esfera de carga positiva uniformemente distribuída e nesta esfera se encontravam incrustados os electrões (partículas de carga negativa) que possuíam uma massa e um volume muito menor do que a esfera ao qual se encontravam ligados (ver Figura 102). A carga dos electrões compensava completamente a carga positiva da esfera, de modo que o átomo era, no seu todo, neutro. Esta descrição é compatível com os dados que se possuíam acerca do átomo. Ou seja, que tinha dimensões muito pequenas (∼0.1x10-9m), era estável (não se dividia nem colapsava espontaneamente), era neutro, embora tivesse na sua constituição partículas negativas (os electrões) e era capaz de emitir e absorver radiação.
A estabilidade do modelo de Thomson devia-se ao equilíbrio entre a força de atracção que a esfera exercia sobre os electrões e a força de repulsão que estes exerciam uns sobre os outros. De qualquer forma, numa abordagem clássica deste sistema, os electrões manter-se-iam em movimento oscilatório em torno de um ponto de equilíbrio o que conduziria à emissão de radiação (uma partícula carregada e em movimento, segundo a teoria clássica, emite radiação electromagnética). Na verdade, esta começou por ser a primeira debilidade deste modelo, pois, embora se soubesse já que, em determinadas condições, a matéria poderia emitir radiação, as características da radiação emitida (nomeadamente o seu comprimento de onda) não coincidiam com

133
as previstas pelo modelo. No entanto, foi a conhecida experiência de Rutherford que colocou, definitivamente, de parte o modelo de Thomson.
O modelo de Rutherford - Rutherford projectou uma experiência no seu
laboratório em que uma folha metálica era bombardeada com pequenas partículas carregadas positivamente (partículas α) e em que se media a radiação após a interacção destas partículas com a matéria. Nesta experiência verificou-se que a grande maioria das partículas ou não era desviada, ou sofria desvios caracterizados por ângulos muito pequenos. No entanto, observou-se que algumas das partículas sofriam desvios muito grandes (superiores a 90º) o que não era compatível com o modelo de Thomson em que a massa estava uniformemente distribuída por todo o átomo. Assim, Rutherford sugeriu que a massa do átomo estaria praticamente toda concentrada no seu centro, introduzindo, pela primeira vez, a noção de núcleo. É importante enfatizar que, apesar deste modelo continuar a não explicar o tipo de radiação absorvida e emitida pelos átomos, conseguiu prever quantitativamente a forma de dispersão da radiação quando esta interage com a matéria. Previu, nomeadamente, a dependência da intensidade da radiação segundo um determinado ângulo, em função da espessura da folha metálica, do seu material, da energia cinética das partículas que eram projectadas e desse mesmo ângulo. O modelo de Böhr – Mantinha-se, pois, em aberto a questão relacionada com a emissão e absorção de radiação pelos átomos. Alguns estudos baseados em descargas eléctricas em gases ou na incidência de feixes luminosos através de gases, mostraram que, nestas condições, se produziam espectros68 caracterizados pelo aparecimento de riscas estreitas, bem definidas e que apresentavam uma certa regularidade. É de notar, que se verificava que os espectros de emissão não coincidiam,em geral, com os de absorção.
68 Obtém-se um espectro quando se sujeita um determinado meio a radiação e se mede a radiação absorvida ou transmitida por esse meio para diferentes frequências.
Figura 102 - Esquema do modelo atómico de Thomson (modelo de “Pudim de Passas”). Neste modelo toda a carga positiva se encontra uniformemente distribuída numa esfera (a cinzento), na qual se encontram incrustados os electrões (a branco). Deste modo, assume-se que a massa
está, em primeira aproximação, igualmente distribuída por todo o espaço.

134
Böhr propôs, então, um modelo para o átomo de hidrogénio69 baseado na geometria do sistema solar. Ou seja, o átomo seria formado por um núcleo central de carga positiva e onde se concentraria a maior parte da massa. Em redor deste giraria o electrão descrevendo órbitas circulares (ver Figura 103). Mais uma vez a estabilidade do átomo era conseguida através do equilíbrio de forças, desta feita, entre as forças de atracção que se estabelecem entre o núcleo e o electrão, e a força centrípeta associada ao movimento circular do electrão (similarmente ao sistema solar, onde a força de atracção é a força gravítica). Mais uma vez, segundo a teoria clássica, o contínuo movimento do electrão estaria associado à emissão de radiação. Pelo que perderia energia e precipitar-se-ia sobre o núcleo.
Para contornar esta questão, Böhr postulou a existência de estados estacionários, nos quais o electrão não emitiria radiação e que correspondiam às suas órbitas, caracterizadas por determinados raios. De facto, Böhr estipula que o momento angular dessas órbitas é múltiplo de h70 e determina o raio das mesmas a partir deste novo postulado. Além disso, como a energia total do sistema (soma da energia cinética com a potencial) é inversamente proporcional à distância do electrão ao núcleo, a quantização dos raios implica necessariamente a quantização da energia. Desta forma, surgiu a noção de estados energéticos quantizados, ou seja, a existência de um sistema atómico caracterizado por uma energia que não podia tomar qualquer valor, mas que, pelo contrário, apenas admitia valores discretos bem determinados. Este modelo previu quantitativamente a energia de cada nível, sendo o seu valor dado pela expressão:
2
2
6.13n
ZEn −=
equação 130 69 O átomo de hidrogénio não só é o mais simples para se trabalhar, como, precisamente por esse motivo, também era o átomo do qual se possuía melhor informação referente aos seus espectros (de emissão e de absorção). 70 h é definido como: h = h/2π, sendo h a constante de Plank, que toma o valor 6.63x10-34Js (unidades do SI).
Figura 103 - Esquema do modelo de Böhr para o átomo de hidrogénio. Neste modelo o electrão descreve órbitas circulares em redor do núcleo, correspondendo cada uma dessas órbitas a um
estado estacionário, caracterizado por um determinado raio e uma determinada energia.

135
Onde, Z é o número atómico do átomo71 e n é um número inteiro positivo que corresponde a uma das órbitas. Assim, como se poderá observar a partir da análise da equação, os estados caracterizados por maiores valores de n, que correspondem a maiores raios das órbitas, estão associados a maiores valores energéticos72, sendo no limite de n→∞ a energia considerada nula. Além disso, o valor 13.6 é uma constante que depende de várias grandezas físicas, como a massa do electrão (m), a carga do electrão (e), a constante dieléctrica no vazio (εo) e a constante de Plank (h). Desta forma, estavam reunidas as condições para compreender a existência de riscas nos espectros dos átomos, que correspondem a transições dos electrões entre diferentes níveis de energia. Segundo esta perspectiva, a passagem do electrão de um nível mais energético para outro menos energético dá origem à emissão de radiação, enquanto que a passagem de um nível menos energético para um nível mais energético, ocorre com absorção de energia (ver Figura 104).
A energia emitida ou absorvida nesta situação, cumpre a relação de Plank73: νhE =∆
equação 131
Onde ∆E é a diferença de energia entre os estados, h é a constante de Plank e ν é a frequência da radiação. Com esta teorização, Böhr consegue explicar quantitativamente as riscas dos espectros do átomo de hidrogénio. Inclusivamente consegue explicar porque motivo o espectro de emissão não coincide com o espectro de absorção. De facto, embora no
71 Refira-se, a este propósito, que o modelo do átomo de Böhr, apesar de ter sido desenvolvido para o átomo de hidrogénio, pode facilmente ser estendido a iões com apenas um electrão, mas com maior massa nuclear. Relembrar que o número atómico de um átomo é modernamente definido como o número de protões existentes no seu núcleo. 72 Reparar que a expressão contém um sinal negativo que faz com que quanto maior for a relação Z2/n2, menor seja a energia. 73 Plank tinha já estabelecido que a energia transportada por um fotão (partícula associada à radiação electromagnética) é proporcional à frequência da radiação, sendo a constante de proporcionalidade a constante de Plank, anteriormente referida.
Figura 104 - Esquema do mecanismo de emissão e absorção de radiação, atendendo ao modelo atómico de Böhr.

136
processo de emissão possam existir transições entre todos os níveis74, no processo de absorção os níveis diferentes do primeiro têm um tempo de vida médio tão curto que é virtualmente impossível ocorrerem transições, com ganho de energia, entre níveis que não envolvam o primeiro (é, por exemplo, impossível ocorrer uma transição do nível 2 para o nível 3, embora já seja mais provável ocorrer uma transição do nível 3 para o nível 2). Assim, apesar do modelo atómico de Böhr ser bastante consistente com os resultados obtidos até esse momento, apresenta, ainda, algumas debilidades, sendo as mais importantes: só ser válido para partículas mono-electrónicas e não explicar o facto de algumas das riscas do espectro, quando eram utilizados equipamentos mais sofisticados, serem desdobradas em várias. Os actuais modelos atómicos – Actualmente, para além de as partículas elementares constituintes dos átomos serem bem conhecidas e estudadas, alguns dos conceitos introduzidos por Böhr para explicar o átomo de hidrogénio foram desenvolvidos e sujeitos a um formalismo matemático abrangente que suporta toda a mecânica quântica actual. No que respeita aos constituintes dos átomos sabe-se agora que existem dois tipos de partículas que formam o núcleo: os protões e os neutrões, em que os primeiros possuem carga positiva de 1.60x10-19C e massa igual a 1.67x10-24g e os segundos são electricamente neutros e possuem uma massa próxima da do protão. Quanto aos electrões, aceita-se que apresentam movimento em redor do núcleo, têm uma massa muito menor (9.11x10-28g) e apresentam carga negativa com o mesmo valor absoluto da carga do protão.
Relativamente às características essenciais dos átomos introduzidas pelo formalismo da mecânica quântica há a destacar: 1) A substituição do termo órbita pelo termo orbital; uma orbital é também caracterizada por um nível de energia bem definido, mas em vez de associar ao electrão uma trajectória bem determinada, associa ao electrão uma probabilidade de se encontrar em determinado ponto do espaço (ver Figura 105). 2) Associado ao termo orbital, surge então o de nuvem electrónica, como sendo o lugar geométrico associado à probabilidade de se encontrar o electrão. 3) Cada electrão passa a ser caracterizado por quatro números quânticos (n
– número quântico principal; l – número quântico secundário; ml – número quântico magnético e ms – número quântico de spin). O número quântico principal determina a camada onde o electrão se encontra e está intimamente relacionada com a constante n 74 Embora a este nível se possa afirmar que as transições são todas possíveis, a mecânica quântica indicará algumas restrições nessas transições, nomeadamente quando prevê a existências de níveis de energia intermédios, entre os quais, nem todas as transições são permitidas.
Figura 105 – Representação de uma orbital atómica. As regiões associadas a uma cor mais escura representam uma maior probabilidade de encontrar o electrão.

137
encontrada por Böhr na fórmula que fornece a energia das órbitas. O número quântico secundário permite associar à orbital níveis mais finos de energia75, estando relacionado com a geometria da nuvem electrónica que está associada a essa orbital (ver Figura 106). O número quântico magnético relaciona-se com a orientação da orbital. Enquanto que o número quântico de spin, numa interpretação clássica, é considerado como estando relacionado com um movimento de precessão do electrão em torno de um eixo imaginário e, portanto, só pode tomar dois valores (digamos 1/2 e –1/2). 4) Criação de critérios de preenchimento das orbitais pelos electrões. Estes critérios determinam, entre outras coisas, que: as orbitais menos energéticas sejam primeiramente preenchidas; que só possam existir dois electrões em cada orbital e que o seu número quântico de spin seja diferente; que orbitais de níveis energéticos iguais sejam primeiramente preenchidas com um único electrão (tendo todos eles iguais spins) e só depois vão sendo completamente preenchidas.
Uma questão que, a este respeito, deve ser referida é o facto de, tendo em consideração o modo de preenchimento das orbitais pelos electrões, se verificar que, no estado fundamental (de menor energia) apenas as últimas orbitais (correspondentes a estados de maior energia) podem ficar semi-preenchidas. Esta constatação confere aos electrões destas últimas orbitais um papel preponderante nas características da matéria, uma vez que são eles que determinam essencialmente as suas propriedades eléctricas, mecânicas, térmicas e químicas, sendo particularmente relevantes na explicação da maior ou menor reactividade dos elementos.
75 Na mesma camada, podemos encontrar diferentes níveis de energia que, embora próximos, são distintos e correspondem a diferentes números quânticos secundários.
orbital tipo s orbital tipo p
Figura 106 - Esquema de duas orbitais com diferentes números quânticos principais (a do lado direita é uma orbital s e a do lado esquerdo é uma p). A figura coloca em evidência as diferentes
geometrias de cada uma delas.

138
ANEXO E – Tópicos sobre alguns conceitos de relativos a fenómenos eléctricos Qualquer introdução que se faça acerca do Electromagnetismo pressupõe a existência de cargas eléctricas diferentes: umas positivas, outras negativas. Além dessas propriedades, observa-se ainda que as cargas se conservam, que existem forças de atracção e de repulsão entre as cargas, caso sejam de sinais contrários ou do mesmo sinal, respectivamente; e que essas forças são proporcionais ao inverso do quadrado da distância entre as cargas, o que se traduz matematicamente pela expressão:
2
1
dF ∝
Quanto à capacidade de transportar cargas eléctricas, os materiais dividem-se em: condutores, aqueles que possuem cargas eléctricas livres, capazes de se deslocarem facilmente; isolantes, aqueles que apresentam dificuldade em transportar carga eléctrica e semicondutores, que se comportam electricamente de forma complexa, mas que a este nível, basta admitir que possuem propriedades intermédias entre os condutores e os isolantes, dependentes das condições em que se encontram. O estado de electrização de um corpo, ou seja, a sua carga total ou mesmo a sua distribuição de cargas pode ser alterado de diversas formas, nomeadamente, por contacto, quando dois corpos são postos em contacto físico entre eles e as cargas de um se transferem para o outro. Ou por indução onde é possível carregar um condutor, inicialmente neutro, da forma como está representado na Figura 107: começa-se por aproximar um objecto carregado negativamente, por exemplo, de um condutor. Como as cargas nesse condutor são livres de se moverem, as forças de atracção entre elas fazem com que perto do objecto se encontrem as cargas positivas, enquanto que no outro extremo fiquem as cargas negativas – a). Se, continuando com o objecto carregado negativamente nas proximidades do corpo a electrizar, este for ligado à massa (a um reservatório neutro de carga eléctrica), as cargas negativas movem-se em direcção à massa – b), ficando, então, o objecto carregado positivamente – c) e d).
Figura 107 – Ilustração de como se pode alterar o estado de electrização de corpos por indução no caso de condutores (à esquerda) e no caso de isolantes à direita. (Raymond A. Serway, 4ª
edição, 1996).

139
No caso de isolantes a proximidade de um objecto carregado, apenas redistribui as suas cargas eléctricas, polarizando-o. A Lei de Coulomb é a lei que regulamenta a força que se estabelece entre duas cargas pontuais e foi encontrada graças aos seguintes dados experimentais: a) a força eléctrica entre duas cargas pontuais tem a direcção da linha que as une, b) é inversamente proporcional ao quadrado da distância entre elas, c) é proporcional ao produto das cargas e d) é atractiva quando as cargas têm sinais contrários e repulsiva, quando têm sinais iguais (ver Figura 108).
Figura 108 – Representação as forças eléctricas exercidas entre duas cargas do mesmo sinal (em
cima) e entre cargas de sinal contrário (em baixo). (Raymond A. Serway, 4ª edição, 1996). Matematicamente, a lei de Coulomb é expressa através da relação:
re ur
qqkF
rr
221
eléc = ,
equação 132
com ke a constante de Coulomb: 229
0
C/Nm109875.84
1×==
πεek , sendo ε0 a
permissividade do vazio: 22-120 Nm/C108.8542×=ε .
Como seria previsível pelo cálculo vectorial, também as forças eléctricas cumprem o princípio da sobreposição das forças. De modo que a força que actua sobre uma partícula é a soma de todas as forças exercidas sobre ela. Uma outra grandeza eléctrica de extrema importância é o campo eléctrico. A necessidade de definir esta grandeza nasceu, de certa maneira, com o objectivo de compreender o que se passa no meio na presença de uma carga. Repare-se no seguinte: se num determinado espaço existirem duas cargas, sabemos que existe uma determinada força entre elas, tal como se acabou de referir. O que significa que, se existir apenas uma carga, as propriedades do meio deverão ser alteradas de tal forma que uma segunda carga será actuada pela referida força (a qual não existiria se a primeira não se encontrasse já nas imediações). Então pode concluir-se que a primeira

140
carga modificou o meio à volta, modificação essa à qual se dá o nome de campo eléctrico e que é definido pela razão entre a força eléctrica que actua sobre uma carga de prova positiva colocada num determinado ponto do espaço e o valor dessa carga. Ou seja, matematicamente:
re ur
Qk
q
FE
rr
r
20
eléc == ,
equação 133
sendo a sua unidade N C-1. Ora, tendo em conta esta definição, facilmente se conclui, conforme está ilustrado na Figura 109 que: a) O campo tem sempre a direcção e sentido da força, b) o campo é independente da partícula de prova (uma vez que esta se considera sempre positiva), dependendo apenas das cargas que lhe dão origem, c) O campo existe mesmo na ausência da carga de prova, d) a carga de prova deve ser tão pequena quanto possível, para que não interfira no campo que está estabelecido.
Figura 109 – Representação do campo eléctrico criado no ponto P, na posição de uma partícula de prova q0, na presença a) de uma carga positiva ou b) de uma carga negativa. (Raymond A.
Serway, 4ª edição, 1996).
Uma forma de representar o campo eléctrico é através das chamadas linhas de campo, que têm as seguintes propriedades, conforme se pode observar na Figura 110: a) o vector campo eléctrico é tangente às linhas de campo; b) o nº de linhas de campo por unidade de área que atravessam uma superfície perpendicular ao campo é proporcional à amplitude do campo nessa região, c) as linhas começam nas cargas positivas e terminam nas negativas (ou então começam ou acabam no infinito se a carga total não for nula), d) o nº de linhas que chegam ou partem de uma carga é proporcional à sua amplitude, e) as linhas não se cruzam.
Verifique-se que esta forma de desenhar as linhas de campo é compatível com a lei de Coulomb, uma vez que é fácil provar que:
24 r
NE
πα ,
desde que se considere uma esfera centrada numa carga pontual e onde N é o nº de linhas de campo que atravessam a superfície da esfera.

141
Figura 110 – Representação de linhas de campo. (Raymond A. Serway, 4ª edição, 1996).
Deve ter-se em conta que esta representação do campo eléctrico apresenta algumas debilidades: dão a ilusão de que o campo eléctrico é descontínuo, o que não é verdade, e aparecem como uma representação bi-dimensional de uma realidade tri-dimensional. Na Figura 111 encontram-se alguns exemplos de distribuição de linhas de campo devido a várias conformações de carga.
a) b) c)
d) e)
Figura 111 – Representação das linhas de campo para diferentes distribuições de carga. (Raymond A. Serway, 4ª edição, 1996).
Repare-se que uma carga que seja colocada num campo eléctrico uniforme
(com a mesma intensidade, direcção e sentido), fica sujeita a uma força, pelo que terá um movimento uniformemente acelerado, com aceleração dada por:
m
Eqa
rr=
equação 134

142
Neste périplo pelas principais grandezas eléctricas, uma das incontornáveis é o potencial eléctrico. Esta grandeza permite uma abordagem energética acerca das grandezas eléctricas. Comece-se por calcular o trabalho, WFe realizado por uma força
eléctrica, eFr
, sobre uma carga, q0, sujeita a um campo eléctrico, Er
, que se desloca do
ponto A para o ponto B, através dos caminhos infinitesimais sdr
:
∫∫ ==B
A
B
A
eF sdEqsdFWe
rrrr.. 0
equação 135
Se, tal como se fez na área da Mecânica, a este trabalho for associada uma variação de energia potencial ∆U, é possível fazer-se a seguinte dedução:
∫∫
∫∫
−=∆⇔−=−
⇔
⇔−=−⇔−=∆⇔∆−=
B
A
B
A
if
B
A
if
B
A
F
sdEVsdEq
UU
sdEqUUsdEqUUWe
rrrr
rrrr
..
..
0
00
,
onde a quantidade U/q0 é definida como a função potencial eléctrico.
Repare-se que o potencial eléctrico é dependente do campo, mas independente da carga, enquanto a energia eléctrica depende de ambos. Ou seja, o potencial eléctrico pode ser visto como uma espécie de energia em potência, ou seja, se uma carga for colocada num ponto onde está estabelecido um determinado potencial eléctrico, essa carga adquire uma energia potencial eléctrica. Repare-se ainda que o potencial eléctrico é definido através de uma diferença, o que pressupõe a existência de uma referência. Deste modo, por convenção, o potencial num ponto infinito é nulo. Pelo que a sua definição é: “ O potencial eléctrico num qualquer ponto P é o trabalho por unidade de carga realizado sobre uma partícula positiva para a fazer mover do infinito até esse ponto.” A sua unidade é o volt (V), equivalendo a 1 J C-1. Dada a definição de diferença de potencial é fácil verificar que a diferença de potencial entre os pontos A e B (pertencentes à mesma linha de campo) criada por um campo uniforme, vem dada por:
EdV −=∆ ,
equação 136
sendo d a distância entre os dois pontos. Enquanto que a variação de energia potencial, vem dada por:
EdqU 0−=∆ .
equação 137
Repare-se como é uma situação análoga ao que acontece com uma massa sob a acção de um campo gravítico (ver Figura 112).

143
Figura 112 – Representação da analogia do que se passa entre uma carga que se move no interior de um campo eléctrico e o que se passa com uma massa sob a acção de um campo gravítico.
(Raymond A. Serway, 4ª edição, 1996).
Se o deslocamento não acontecer segundo a direcção do campo, como no caso
da Figura 113, então a diferença de potencial entre o ponto A e B virá dado por :
EdsEV −=−=∆rr
.
equação 138
onde d é o comprimento do segmento de recta AC.
Figura 113 – Representação das linhas de um campo eléctrico uniforme e de um deslocamento de
uma carga que não ocorre segundo a direcção dessas linhas. (Raymond A. Serway, 4ª edição, 1996).
Donde resulta que, qualquer plano perpendicular a um campo eléctrico
uniforme se encontra ao mesmo potencial. A este propósito pode definir-se superfície equipotencial como o lugar geométrico que se encontra ao mesmo potencial eléctrico. E, por fim, é ainda de referir que a diferença de potencial criada por uma carga pontual, q, entre um ponto A e B, vem dada por:
−=∆
AB
err
qkV11
equação 139

144
onde rA é a distância do ponto A à carga q e rB é a distância do ponto B à carga q. Se se pretender saber qual o potencial eléctrico num determinado ponto, criado por uma carga pontual deve pensar-se que no infinito (r = ∞) V = 0 e então:
r
qkV e= .
equação 140
Donde resulta, para um conjunto de partículas carregadas, um potencial eléctrico dado por:
∑=i i
ie
r
qkV ,
equação 141
e a energia potencial referente à interacção de duas partículas carregadas, q1 e q2 :
2,1
21
r
qqkU e=
equação 142
Uma última grandeza importante para o estudo dos fenómenos eléctrico é a corrente eléctrica. A qual é definida como a carga eléctrica, q, que atravessa uma dada superfície por unidade de tempo, t. Matematicamente, toma a forma:
dt
dqI =
equação 143
e a sua unidade é o ampere (A), ou C s-1 e é a grandeza física que dá a medida da quantidade de cargas que se encontram em movimento num dado o material, num determinado intervalo de tempo.

145
ANEXO F – Alguns conceitos essenciais relacionados com calor e temperatura
A noção de calor é muito intuitiva, uma vez que faz parte das nossas experiências diárias tocar em objectos a diferentes temperaturas e entender que, quando estes são colocados em contacto, é transferido calor do objecto a temperatura mais elevada para aquele que se encontra a temperatura mais baixa. Neste processo, quando o equilíbrio é alcançado, ambos os objectos atingem a mesma temperatura, cujo valor se encontra entre os valores das temperaturas iniciais. O que já não é tão imediato é compreender que o calor é uma forma de energia. De facto, uma análise histórica demonstra que, inicialmente, o que fluía entre objectos a diferentes temperaturas era tido como algo de natureza distinta das restantes formas de energia. E apenas quando se percebeu que o calor se podia transformar em trabalho, se estabeleceu que o calor seria uma nova forma de energia.
Escalas de temperatura
Um conceito de extrema importância em termodinâmica é, indubitavelmente, a temperatura. Esta grandeza mede, macroscopicamente a maior ou menor agitação das moléculas constituintes de um determinado objecto. Os termómetros são, pois, dispositivos que medem a temperatura de um objecto tendo como base a variação de uma determinada propriedade desse objecto com a temperatura. Cedo os cientistas perceberam que a maioria dos materiais se expande com a temperatura, não sendo de admirar que uma grande parte dos termómetros se baseie neste facto, como o caso do termómetro de mercúrio que foi, durante muito tempo, utilizado em aplicações clínicas.
Um procedimento que continua a ser importante na construção de qualquer termómetro é a sua calibração. Neste processo são considerados dois pontos de referência: por exemplo, o ponto de ebulição da água e o seu ponto de fusão (Figura 114). No caso dos termómetros de mercúrio observa-se qual a altura do líquido em cada uma destas temperaturas e, em seguida, estabelece-se uma escala em que cada divisão corresponde à mesma variação de temperatura.
Figura 114 - Esquema da calibração de um termómetro, com base no ponto de fusão e de
ebulição da água. (Adapt. R.A. Serway, 1996).

146
Como facilmente se compreende, para que este procedimento esteja correcto será essencial que iguais aumentos de volume do líquido correspondam exactamente às mesmas variações de temperatura na gama considerada. Ou seja, é necessário garantir que a propriedade do material que varia com a temperatura tenha uma dependência linear com esta. O que em termos gráficos se traduz por uma recta quando nas ordenadas se representa a temperatura e nas abcissas a outra propriedade (expansão volúmica, por exemplo, como no caso da Figura 115).
Volume de um material em função da sua temperatura
0 50 100 150
Temperatura (ºC)
Volume de um corpo
Figura 115 - Esquema de um gráfico do volume de um material arbitrário em função da
temperatura a que este se encontra. A linearidade apresentada revela-se, neste caso, como excelente para construir termómetros nesta gama de temperaturas.
Existem várias escalas de temperatura. A mais utilizada continua a ser a de
Celsius (ºC), que corresponde àquela em que ao ponto de fusão da água se associa a origem da escala (0 ºC) e ao ponto de ebulição se associa 100 ºC. A escala de Fahrenheit continua também a ser utilizada, particularmente nos Estados Unidos da América e relaciona-se com na de Celsius através da seguinte relação:
325
9+= CF TT ,
equação 144
onde TF é a temperatura em graus Fahrenheit e FC a temperatura em graus Celsius. A unidade de temperatura no S.I. não é, porém, nenhuma destas, mas sim o
kelvin. Esta escala de temperaturas é também conhecida por escala de temperatura absoluta (similarmente, a origem desta escala é também chamada o zero absoluto). A passagem da escala de temperatura absoluta para a escala de Celsius é feita atendendo a que o zero absoluto corresponde a -273.15 ºC e que um grau Celsius corresponde a um kelvin. Assim, é válida a expressão:
273.15+= CK TT ,
equação 145
sendo TK a temperatura em kelvin e TC a temperatura em graus Celsius. Uma questão a realçar é o facto de diferenças de temperatura serem iguais querem estejam em graus Celsius, quer estejam em kelvin, o que resulta de a variação de um grau Celsius corresponder à variação de um kelvin.

147
Expansão térmica de corpos Tal como já foi referido anteriormente, a maioria dos materiais aumenta as
suas dimensões com a temperatura. Chamando-se a este fenómeno dilatação térmica dos corpos (ver Figura 116).
Figura 116 - Ilustração do fenómeno da dilatação térmica. (Adapt. R.A Serway, 1996).
A justificação microscópica desta observação está relacionada com o facto de ao aumentar a temperatura não só as vibrações das partículas se tornarem mais amplas como o seu ponto de equilíbrio se afasta, aumentando a distância entre elas. Um exemplo bem conhecido de um comportamento distinto deste é o que se passa com a água a temperaturas próximas do seu ponto de fusão. O gráfico da densidade da água em torno de 4 ºC sofre uma inflexão (ver Figura 117), começando a diminuir conforme diminui a temperatura. Ou seja, com a diminuição da temperatura, a água passa a ocupar um volume superior. De facto, se observarmos a estrutura da água no estado sólido, verificamos que apresenta uma geometria muito aberta, resultando num volume superior ao ocupado pelas moléculas de água no estado líquido.
Figura 117 - Gráfico da densidade da água em função da temperatura na gama entre 0ºC e 10ºC.
(Adapt. E.R. Jones e R.L. Childers, 1993).
Esta particularidade da água é a responsável por continuar a existir vida na hidrosfera, mesma em regiões muito frias. Repare-se que conforme a água vai arrefecendo e aproximando-se de 0 ºC a sua densidade diminui e, portanto, a água mais fria sobe. Por este motivo, a água começa a gelar à superfície, preservando-se em estado líquido nas camadas mais profundas e, permitindo, assim, a continuação de vida.

148
ANEXO G – Tópicos sobre teoria cinética dos gases e transferências de calor
Tópicos de teoria cinética O comportamento termodinâmico dos materiais é fortemente condicionado
pelo seu estado físico, uma vez que, tal como já se referiu, a temperatura dos corpos depende dos movimentos das moléculas que os constituem e o movimento das moléculas depende muito do estado físico em que se encontram. Basta recordar que as moléculas de um gás são fracamente ligadas entre si, mantendo-se em permanente movimento errático; que as dos sólidos têm os seus movimentos muito condicionados pela forte interacção que estabelecem com as moléculas vizinhas e que as de um líquido têm um comportamento entre estes dois extremos.
Formalmente, a situação em que é mais fácil estabelecer um paralelismo entre o que se passa ao nível molecular e o que se observa ao nível macroscópico é a correspondente aos gases. Considere-se as moléculas de um gás como pequenas partículas que apenas interagem entre si através de colisões elásticas76. Nestas condições, a energia cinética vai-se transferindo de molécula para molécula, embora em média, ela se mantenha constante77. A energia cinética média de cada partícula é dada por:
2
2
1vmEc = ,
equação 146
onde m é a massa de cada uma das moléculas constituintes do gás (que se consideram iguais entre si) e v é a sua velocidade média quadrática. Se ignorarmos os movimentos de rotação e de vibração das moléculas, esta energia multiplicada pelo número de moléculas existentes no gás, será a sua energia interna. Ora verifica-se que a energia interna de um gás ideal monoatómico, U, é proporcional à sua temperatura, T; cumprindo-se a expressão:
nRTU2
3= ,
equação 147
sendo n o número de moles presentes no gás e R a constante dos gases perfeitos, que toma o valor 8.314 J mol-1 K-1.
Caso se pretenda considerar os movimentos de rotação das moléculas do gás78, a equação 147 tomará a forma:
76 Uma colisão diz-se elástica quando não só o momento linear se mantém constante, mas também a energia cinética do sistema. 77 Desde, evidentemente, que a temperatura se mantenha constante. 78 Enquanto que os gases ideais monoatómicos apresentam apenas movimentos de translação, os gases ideais diatómicos apresentam também movimentos de rotação (que podem ser segundo duas direcções e, por isso, apresentam dois graus de liberdade) e, caso a temperatura seja suficientemente alta, deve ainda atender-se aos movimentos de vibração (aos quais correspondem também dois graus de liberdade).

149
nRTU2
5= ,
quando não são considerados movimentos de vibração. E:
nRTU2
7= ,
no caso em que também os movimentos de vibração sejam englobados.
Um outro resultado muito importante no estudo dos gases é a conhecida Lei
dos Gases Ideais79 (ver Figura 118). Nesta lei estabelece-se que existe uma proporcionalidade directa entre o volume, V, e a temperatura de um gás, T, (Lei de Charles e Gay-Lussac) e que a pressão, P, e o volume são inversamente proporcionais (Lei de Boyle). O que matematicamente se traduz através da expressão:
nRTPV = , equação 148
sendo n o número de moles do gás.
a) b)
Figura 118- Ilustração da Lei dos Gases Ideais. a) Proporcionalidade directa entre o volume e a temperatura; b) proporcionalidade inversa entre a pressão e o volume. (Adapt. de
http://cwx.prenhall.com/bookbind/pubbooks/hillchem3/medialib/media_portfolio/05.html, Setembro de 2004).
79 É interessante referir que esta Lei, embora tenha sido estabelecida experimentalmente, consegue ser deduzida a partir da análise do comportamento cinético das moléculas de gás.

150
Transferência de calor
Em geral, associamos à transferência de calor um aumento de temperatura, no entanto, esta não é a única consequência de um transporte de calor. Na verdade, o calor transferido de um corpo para outro pode ser utilizado: 1) num aumento de temperatura; 2) na ocorrência de uma mudança de estado ou 3) na conversão deste num outro tipo de energia. Nesta secção iremos discutir alguns conceitos associados aos dois primeiros mecanismos (o terceiro será discutido mais tarde) e referir as diversas formas sob as quais o calor pode ser transferido.
Associado à maior ou menor tendência de um corpo alterar a sua temperatura quando recebe ou liberta calor, está uma grandeza à qual damos o nome de calor específico. O calor específico de uma substância, C, corresponde ao calor que é necessário fornecer a um kg dessa substância para que a sua temperatura aumente de 1 K. Em termos formais, seja Q o calor transferido (recebido) para (de) um dado corpo de massa, m, e seja ∆T a variação de temperatura a que esse corpo fica sujeito, é possível escrever:
TmCQ ∆= . equação 149
Embora a unidade do S.I. de calor seja, obviamente, o joule (uma vez que se trata de uma forma de energia), durante muito tempo foi utilizada uma unidade, que, aliás, não caiu ainda em desuso, que é a caloria (cal). A definição da unidade caloria está intimamente relacionada com a equação 149, uma vez que uma caloria define-se como o calor necessário para fazer subir um grama de água pura de 14.5 ºC para 15.5 ºC. Ou seja, o calor específico da água pura, dado em cal g-1 C-1 é 1. Atendendo a que 1 cal corresponde a 4.186 J, facilmente se verifica que o calor específico da água em S.I. é 4.186 x 103 J kg-1 K-1. Na Tabela 7 estão indicados alguns valores de calor específico.
Substâncias Calor específico (cal g-1 ºC) Água 1 Gelo 0.480 Corpo humano (média) 0.83 Solo (dependendo da % de água) 0.2-0.8 Alumínio 0.214 Proteínas 0.4
Tabela 7 - Calor específico de algumas substâncias. (Adapt. de P. Davidovits, 2001).
A título ilustrativo examine-se o que se passa com o corpo humano. Os seus constituintes são fundamentalmente água (cerca de 75%) e proteínas (cerca de 25%), conjuntamente com alguma gordura e minerais. O seu calor específico é reflexo desta composição. Repare-se que, se considerarmos apenas a contribuição da água e das proteínas, obtém-se um valor muito próximo do valor medido experimentalmente:
85.04.025.0175.025.075.0_ =×+×=+= proteínaságuahumanocorpo CCC cal g-1 C-1.

151
Uma outra grandeza importante para esta discussão é o calor latente. Conforme se referiu anteriormente a transferência de calor de (ou para) um sistema pode implicar uma mudança de estado e o calor latente mede a maior ou menor extensão de massa que fica sujeita a essa mudança de fase quando existe transferência de calor. Como facilmente se compreende, cada substância apresenta dois valores de calor latente: o calor latente de fusão, Lf (que tem o mesmo valor que o calor latente de solidificação) e o calor latente de evaporação, Le, (que tem o mesmo valor que o calor latente de condensação). Matematicamente são definidos através das expressões:
ou fmLQ = emLQ = ,
equação 150
onde m é a massa de substância e Q o calor transferido. A unidade de calor latente no S.I. é J kg-1. A transferência de calor poderá ser feita através de três processos: por condução, convecção e radiação (ver Figura 119).
Figura 119 - Representação dos diferentes tipos de transporte de calor: a) condução, b)
convecção e c) radiação. (Adap. de P. Davidovits, 2001).
Quando as extremidades de um mesmo objecto se encontram a temperaturas distintas, ao fim de algum tempo, todo o objecto se encontra à mesma temperatura, tendo havido transferência de calor por condução de um extremo para o outro. Este tipo de transporte de energia térmica envolve a vibração dos átomos que se encontram ligados e o movimento de electrões livres que existe em alguns materiais. O movimento de vibração dos átomos é transferido aos átomos adjacentes, conduzindo, dessa forma, o calor. No entanto, como os átomos num sólido se encontram bastante ligados, esta forma de transferência de energia é bastante lenta. Já os electrões livres de alguns materiais, nomeadamente, dos metais, por terem uma grande mobilidade no interior do sólido transferem calor de um modo muito mais eficiente. Por este motivo, os metais são, geralmente, bons condutores de calor. Matematicamente, a taxa de calor conduzido, Q, por unidade de tempo, ∆t, é dada por:

152
( )21 TTL
AK
t
Q c −=∆
,
equação 151
onde Kc é o coeficiente de condutividade térmica, característico do material, A é a área do secção recta do bloco (ver Figura 120), L é o seu comprimento e (T1-T2) é a diferença de temperaturas entre os extremos do objecto.
Figura 120 - Fluxo de calor por condução num bloco de área A, comprimento L e sujeito a uma
diferença de temperaturas: (T1-T2). (Adap. de P. Davidovits, 2001).
Se nos sólidos a forma mais eficiente de transferência de calor é através da condução, nos fluidos o mecanismo mais relevante é a convecção. Quando uma determinada região de um fluido é aquecida, este tende a tornar-se menos denso (ver secção 8.2.) e, portanto, geram-se correntes de fluido que vão aquecer outras regiões. Quando um fluido se encontra em contacto com um sólido, uma parte da energia é transferida para este, aquecendo-o. Mais uma vez é possível quantificar a taxa de transferência de calor, Q, por unidade de tempo, ∆t, através de convecção com base na expressão:
( )21' TTAK
t
Qc −=
∆,
equação 152
em que '
cK é o coeficiente de convecção, função da velocidade do fluido, A é a área
exposta às correntes de convecção e (T1-T2) a diferença de temperaturas entre a superfície e as correntes convectivas. Falta abordar a última forma de transferência de calor que corresponde à emissão de radiação electromagnética, fundamentalmente na gama entre o infravermelho e o visível. Como já se referiu, o aumento da temperatura implica um aumento da amplitude dos movimentos das partículas constituintes da matéria. Quando essas partículas são carregadas (como é o caso dos electrões e dos núcleos atómicos) passam a emitir radiação electromagnética. Na realidade, uma vez que os electrões são muito mais leves do que os núcleos, este mecanismo ocorre prioritariamente devido à vibração electrónica. Além disso, a energia irradiada é tanto maior quanto maior for a temperatura do objecto emissor. Neste caso, a taxa de calor perdido, Q, por unidade de área do objecto, A, é dada por:

153
4TeA
Qσ= ,
equação 153
onde e é a emissividade da superfície (e depende da temperatura, da natureza da superfície e pode variar de 0 a 1), σ é a constante de Stefan-Bolzmann (5.67 x 10-8 W m2 K4) e T é a temperatura absoluta do corpo. A equação anterior revela dois factos importantes: 1) que este tipo de transferência de calor é particularmente importante para temperaturas muito elevadas (repare-se na dependência da perda de calor com a quarta potência da temperatura); 2) que qualquer que seja a temperatura de um objecto, ele perde calor através deste mecanismo. Um outro ponto importante nesta discussão é o facto de a equação 153 ser também válida para descrever a energia absorvida por um corpo. Deste modo, um corpo à temperatura T1, e num meio à temperatura T2, liberta energia térmica por radiação, com uma taxa de:
( )42
41 TTe
A
Q−= σ ,
equação 154
uma vez que o parâmetro e, é igual quer o corpo esteja a libertar, quer esteja a absorver radiação.