Slide sem títulopaginapessoal.utfpr.edu.br/msergio/portuguese/ensino-de-fisica/...1.4. Tipos de...
32
DAFIS/DAQBI - PPGFCET Sistemas Complexos Prof. Mário Sérgio Freitas, Dr. - UTFPR/DAFIS [email protected] [ M.S. Freitas / UTFPR ]
Transcript of Slide sem títulopaginapessoal.utfpr.edu.br/msergio/portuguese/ensino-de-fisica/...1.4. Tipos de...

DAFIS/DAQBI - PPGFCET
Sistemas Complexos
Prof. Mário Sérgio Freitas, Dr. - UTFPR/DAFIS
[ M.S
. Freitas / U
TF
PR
]
Ementa0 – INTRODUÇÃO 1 – REDES BOOLEANAS E AUTÔMATOS CELULARES2 – AUTOSSIMILARIDADE E GEOMETRIA FRACTAL3 – EQUAÇÕES A DIFERENÇAS FINITAS ( “MAPAS” )4 – MAPAS BIDIMENSIONAIS5 – EQUAÇÕES DIFERENCIAIS BIDIMENSIONAIS
texto-base: D.Kaplan, L.Glass Understanding Nonlinear Dynamics
(Springer, N.Y, 1995).

CAP 3 - EQUAÇÕES A DIFERENÇAS FINITAS ( “MAPAS” )
1.1. Exemplo para motivação: Contagem em um ecossistema
*população de moscas de uma floresta
[ M.S
. Freitas / U
TF
PR
]

*amostra coletada sempre no mesmo dia do ano*duração do levantamento: 25 anos [fig. 1.1]
série temporal como ajustar um modelo matemático?
variáveis: * t tempo, dado pelo ANO da contagem (variável DISCRETA)* N t número de moscas no ano t ( “ESTADO” do sistema, variável CONTÍNUA)
primeira simplificação contagem num dado ano:depende apenas da contagem no ano anterior
N t +1 = f ( N t )
( equação a diferenças finitas, ou “mapa” )
“DINÂMICA” do sistema:evolução temporal do estado do sistema
1.2. Tipos de comportamento dinâmico num mapa linear
suposição mais simples para o exemplo das moscas :
N t +1 = R N t (mapa linear)
significado de R:relacionado ao número médio de ovosbem-sucedidos postos por mosca
“solução” do mapa obter N t para qualquer t
* sendo conhecidos:R (PARÂMETRO) e N 0 (CONDIÇÃO INICIAL)
determinar N 1 , N 2 , N 3 , etc (SÉRIE TEMPORAL)
caso linear admite resolução analítica(expressão literal, genérica)
N 1 = R N 0
N 2 = R N1 = R (R N 0 ) = R2 N 0
N 3 = . . . = R3 N 0
. . .N t = Rt N 0
(válido para quaisquer valores de R e N 0 )
influência do valor de R na série temporal :* no exemplo das moscas: só fazem sentido valores de R positivos
0 < R < 1 decaimento [fig 1.2 ]R > 1 crescimento [fig. 1.3 ]
R = 1 estado estacionário [fig. 1.4 ]
* outros exemplos: R<0 pode ter uma interpretação relevante
-1 < R < 0 decaimento alternado [fig. 1.5 ]R < -1 crescimento alternado [fig. 1.6 ]
R = -1 ciclo periódico [fig. 1.7 ]
1.3. Métodos de iteração para mapas
casos não-lineares: solução analítica pouco viável série temporal: obtida graficamente ou numericamente
*sendo conhecida a equação a diferenças finitas
para cada:valor numérico do parâmetrovalor numérico da condição inicialobter:uma solução particular do mapa
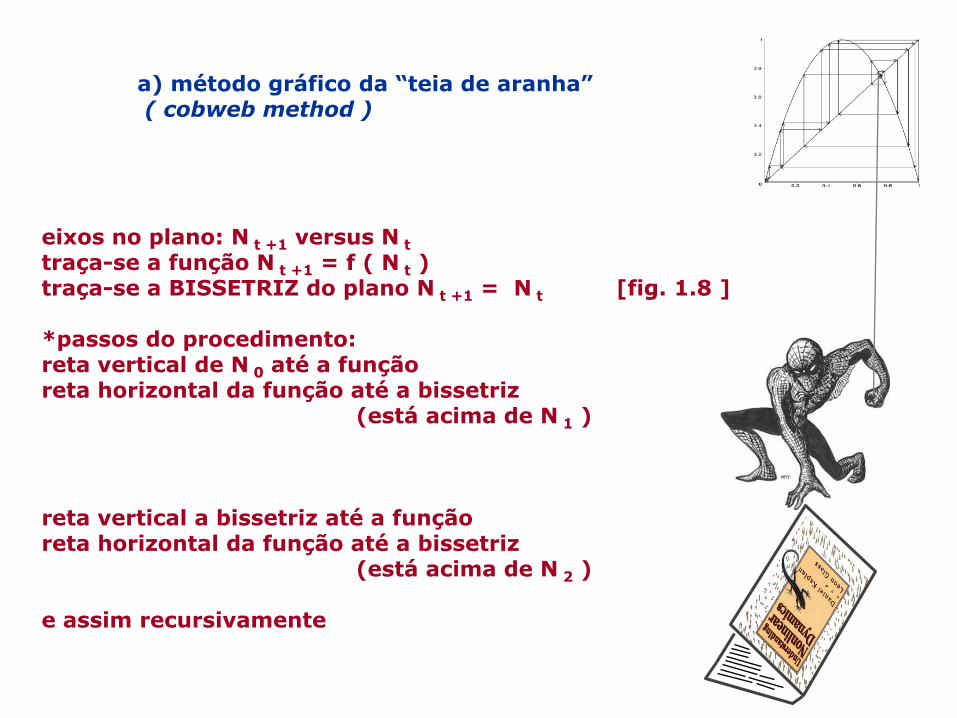
a) método gráfico da “teia de aranha”( cobweb method )
eixos no plano: N t +1 versus N t
traça-se a função N t +1 = f ( N t )traça-se a BISSETRIZ do plano N t +1 = N t [fig. 1.8 ]
*passos do procedimento:reta vertical de N 0 até a funçãoreta horizontal da função até a bissetriz
(está acima de N 1 )
reta vertical a bissetriz até a funçãoreta horizontal da função até a bissetriz
(está acima de N 2 )
e assim recursivamente
b) método de iteração numérica
apropriado para programar em computador ou calculadora* série temporal obtida recursivamente
exemplo: N t +1 = R N t com R = 0.9 e N 0 = 100
N 0 = 100N 1 = 0.9 x 100 = 90N 2 = 0.9 x 90 = 81
N 3 = 0.9 x 81 = 72.9
. . .
vantagem do método da “teia de aranha”:
* fácil visualização e compreensão da dinâmica
vantagem do método de iteração numérica:
* a precisão não é limitada por recursos gráficos
1.4. Tipos de dinâmica num mapa não-linear
* voltando às medidas no exemplo das moscas: não se ajustam a nenhum comportamento de mapa linear
a equação linear só vale para valores pequenos de N t
* taxa de crescimento: deve diminuir com o aumento de N t
(regida por um novo parâmetro b)
* o novo modelo estará levando em conta: competição por alimento perda de fertilidade por subnutrição aumento da taxa de predação, etc
N t +1 = (R – b N t ) N t
ouN t +1 = R N t – b N t
2
(mapa não-linear)
modelo normalizado pela mudança de variáveisx t = ( b N t / R )
resultax t + 1 = R x t ( 1 – x t )
(“mapa quadrático” ou “mapa logístico”)
intervalo de variação de x: 0.0 < x < 1.0intervalo de variação de R: 0.0 < R < 4.0
* investigação dos tipos de comportamento:
fixa um valor para R arbitra um valor para x0
aplica o método da “teia de aranha” esquematiza a série temporal N = N (t)
a) R= 1.5x t + 1 = 1.5 x t ( 1 – x t )
traça a curva com os eixos x t+1 e x t
traça a bissetriz do plano x t+1 = x t
[fig. 1.9 ]arbitra x 0 = 0.1constrói as iterações (teia de aranha)resultado depois de algumas iterações: estado do sistema:aproxima-se cada vez mais de x t = 0.33
[fig. 1.10] tipo de comportamento final para R = 1.5:
estado estacionário (aproximação monotônica)
obs: o estado final independe da escolha de x0
(para este mapa)

b) R = 2.9x t + 1 = 2.9 x t ( 1 – x t )
repetindo o mesmo procedimento(com x 0 = 0.1) estado do sistema:aproxima-se cada vez mais de x t = 0.65
[fig. 1.11]
tipo de comportamento final para R = 2.9:estado estacionário (aproximação alternada)
c) R = 3.3x t + 1 = 3.3 x t ( 1 – x t )
teia de aranha com x 0 = 0.2:[fig. 1.12 ]
estado do sistema:tende a se alternar em 2 valores (0.48 ; 0.82)
[fig. 1.13 ] tipo de comportamento final para R = 3.3:
ciclo periódico (duração de 2 iterações)
d) R = 3.52x t + 1 = 3.52 x t ( 1 – x t )
teia de aranha com x 0 = 0.2: estado do sistema:tende a se alternar em 4 valores(0.51; 0.88; 0.37; 0.82)
[fig. 1.14 ] tipo de comportamento final para R = 3.52:
ciclo periódico (duração de 4 iterações)
e) R = 4.0x t + 1 = 4.0 x t ( 1 – x t )
teia de aranha com x 0 = 0.2:[fig. 1.16]
estado do sistema:tende a visitar valores de forma irregular
[fig. 1.15 ] tipo de comportamento final para R = 4.0:
caos (nunca se repete, é aperiódico)

1.5. Estados Estacionários: Estabilidade
* propriedade de um estado estacionário: x t +1 = x t
caracterização matemática: para a equação a diferenças x t +1 = f (x t ) propriedade de um ponto fixo x* : x*t = f ( x*t )
questões relevantes para um dado mapa:
existe algum ponto fixo x* ? dado um estado próximo de x*, as iterações seguintes se aproximamde x* ?
( nesse caso, x* é dito localmente estável ) dado um estado qualquer, as iterações se aproximam de x* ?
( nesse caso, x* é dito globalmente estável )

COMO ENCONTRAR PONTOS FIXOS?
num mapa linear: x*t = R x*t
solução única (para R 1): x*t = 0( zero moscas num ano, zero no ano seguinte! )
num mapa não-linear: x*t = f ( x*t ) podem coexistir vários pontos fixos algebricamente: raízes da equação x*t = f ( x*t )
ex: mapa logístico x t = 0 ; x t = (R – 1)/R
graficamente: interseções da curva do mapa com a bissetrizexs: mapa logístico com R = 2.9 e R = 3.52
[fig. 1.17] e [fig. 1.18](nível auto-sustentável da população de moscas)

ESTABILIDADE LOCAL DE UM PONTO FIXO
num mapa linear: x*t = R x*t
critério de estabilidade local:valor da inclinação R da reta x t +1 = R x t
* iterações de um estado próximo de x*t = 0:para R < 1 aproximam-se de x*t
para R > 1 afastam-se de x*t
num mapa não-linear: x*t = f ( x*t ) critério de estabilidade local:valor m da derivada de x t +1 = f ( x t ) em x*
mdx
df
xt
*
análise local:por mudança de variável y t = x t – x*
no gráfico y t +1 versus y t : o ponto fixo x* aparece na origem traça a bissetriz e constrói a teia de aranha
casos possíveis:
a) m > 1 (ex: m = 1.9) [fig. 1.19 ]tipo de comportamento local:
crescimento monotônico
b) 0 < m < 1 (ex: m = 0.5) [ fig 1.20 ]tipo de comportamento local:
decaimento monotônico
c) - 1 < m < 0 (ex: m = -0.5) [ fig 1.21 ]tipo de comportamento local:
decaimento alternado
d) m < - 1 (ex: m = -1.9) [ fig 1.22 ]tipo de comportamento local:
crescimento alternado

resumo:
* encontra os pontos fixos do mapa;* para cada ponto fixo: calcula a derivada do mapa no ponto interpreta a inclinação m da derivada
m > 0 m < 0
m > 1 INSTÁVEL
crescimento monotônico
INSTÁVEL
crescimento oscilatório
m < 1 ESTÁVEL
decaimento monotônico
ESTÁVEL
decaimento oscilatório
OBS:estabilidade local: x x* para t
(a aproximação para o ponto fixo é assintótica)
x* : dinâmica ASSINTÓTICAx0 , x1 , x2 ,... : dinâmica TRANSIENTE
ex: [fig 1.10]série temporal p/ x 0 = 0.1 (transiente):x10=0.33128; x11=0.33230; x12=0.33282; etcestado assintótico:
x* = 1/3 = 0.33333...
ESTABILIDADE GLOBAL
(o estado inicial pode não ser próximo de x*)
num mapa linear: x*t = R x*t
ponto fixo único: x* = 0se x*=0 for localmente estável: será também globalmente estável
num mapa não-linear: x*t = f ( x*t ) se houver mais de um ponto fixo* nenhum deles poderá ser globalmente estável* se mais de um deles for localmente estável: sistema dinâmico MULTIESTÁVEL
* para cada ponto fixo localmente estável:conjunto de condições iniciais que levam a ele BACIA DE ATRAÇÃO do ponto fixo
http://fisica.ufpr.br/plasma/

1.6. Ciclos Periódicos: Estabilidade
ciclo = padrão repetitivo de estados
condição: x t +n = x t
se x t+j x t para j < n : n é o PERÍODO do ciclo
CORRESPONDÊNCIA ENTRECICLOS PERIÓDICOS E PONTOS FIXOS
ex: mapa logístico com R = 3.3; ciclo com n = 2x t +2 = f ( x t +1 ) = f ( f ( x t ) )
( polinômio do quarto grau 4 raízes )[fig. 1.24 ]
a curva x t +2 = f (x t ) intercepta a bissetriz pontos fixos do mapa de segundo retorno : 2 pontos fixos do mapa de primeiro retorno : 2
estabilidade de um ciclo de período n:*pontos fixos do mapa de n-ésimo retorno (mesmo m para todos) se m < 1: ciclo localmente estável se m > 1: ciclo localmente instável
ex: mapa logístico com R = 4
x t +1 = f ( xt ) só tem pontos fixos instáveis [ fig. 1.16 ]x t +2 = f ( xt ) só tem pontos fixos instáveis [ fig. 1.27 ]x t +3 = f ( xt ) só tem pontos fixos instáveis [ fig. 1.28 ]x t +4 = f ( xt ) só tem pontos fixos instáveis [ fig. 1.29 ]conclusão: não existem ciclos periódicos estáveis
como fica então o comportamento dinâmico?

1.7. Caos
conceito : “dinâmica limitada e aperiódica em um sistema determinístico,com dependência sensível às condições iniciais”
ex mapa logístico com R = 4 [fig. 1.30 ]
duas inicializações ligeiramente diferentes:x0= 0.523423 (pontos); x’0= 0.523424 (círculos)
“APERIÓDICO” os estados do sistema nunca se repetem
“LIMITADO” a dinâmica nunca tende a infinito
“DETERMINÍSTICO” cada estado é absolutamente determinado pelo anterior
“SENSIBILIDADE ÀS CONDIÇÕES INICIAIS” obstrução da previsibilidade a longo prazo
TRANSIÇÃO PARA O CAOS POR DUPLICAÇÕES DE PERÍODO( “rota de Feigenbaum” )
conceito de “bifurcação”: mudança qualitativa no comportamento
causada por variação de um parâmetro
num mapa linear: x t +1 = R x t
* ocorre bifurcação para R = 1 (decaimento crescimento)
num mapa não-linear:* ocorrem diversos tipos de bifurcação duplicação de período num valor R:* um ciclo de período n perde estabilidade* um ciclo de período 2n ganha estabilidade cascata de duplicações de período:* seqüência de valores de R* a dinâmica tende a um “ciclo infinito” (caos)
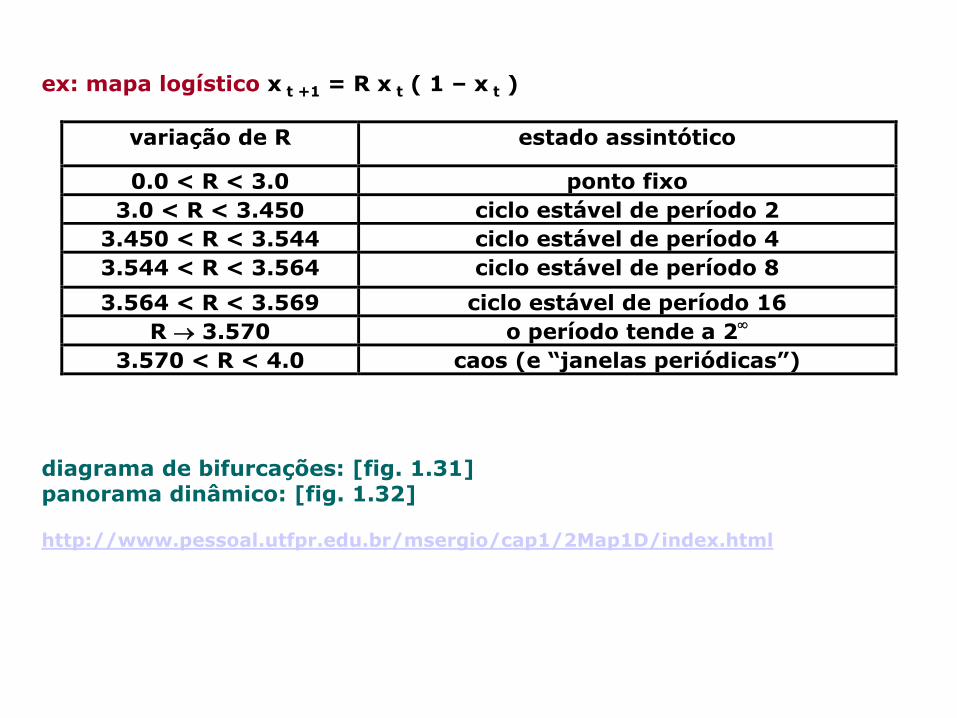
ex: mapa logístico x t +1 = R x t ( 1 – x t )
variação de R estado assintótico
0.0 < R < 3.0 ponto fixo
3.0 < R < 3.450 ciclo estável de período 2
3.450 < R < 3.544 ciclo estável de período 4
3.544 < R < 3.564 ciclo estável de período 8
3.564 < R < 3.569 ciclo estável de período 16
R 3.570 o período tende a 2
3.570 < R < 4.0 caos (e “janelas periódicas”)
diagrama de bifurcações: [fig. 1.31]panorama dinâmico: [fig. 1.32]
http://www.pessoal.utfpr.edu.br/msergio/cap1/2Map1D/index.html
Mitchell Feigenbaum (1944 - ...)
* identificação de uma “cascata de bifurcações”
* determinação de uma
constante de universalidade (1978)
[ http://www.kuodesign.com/klog/1975/]
[ http://aetherwavetheory.info/backup/Fyzika11/]
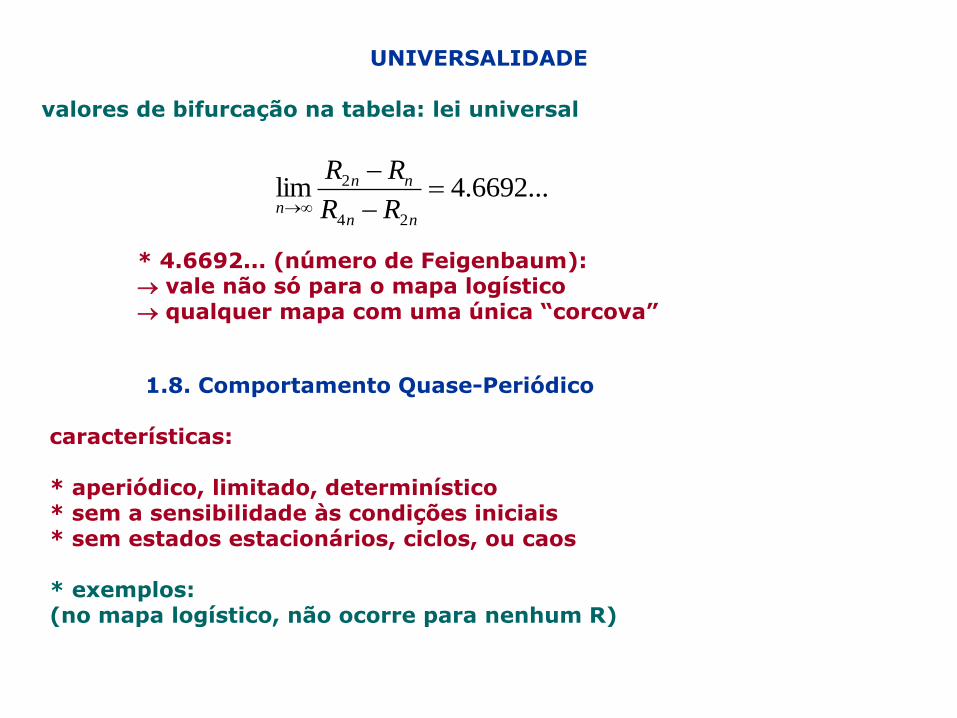
UNIVERSALIDADE
valores de bifurcação na tabela: lei universal
...6692.4lim24
2
nn
nn
n RR
RR
1.8. Comportamento Quase-Periódico
características:
* aperiódico, limitado, determinístico* sem a sensibilidade às condições iniciais* sem estados estacionários, ciclos, ou caos
* exemplos:(no mapa logístico, não ocorre para nenhum R)
* 4.6692... (número de Feigenbaum): vale não só para o mapa logístico qualquer mapa com uma única “corcova”
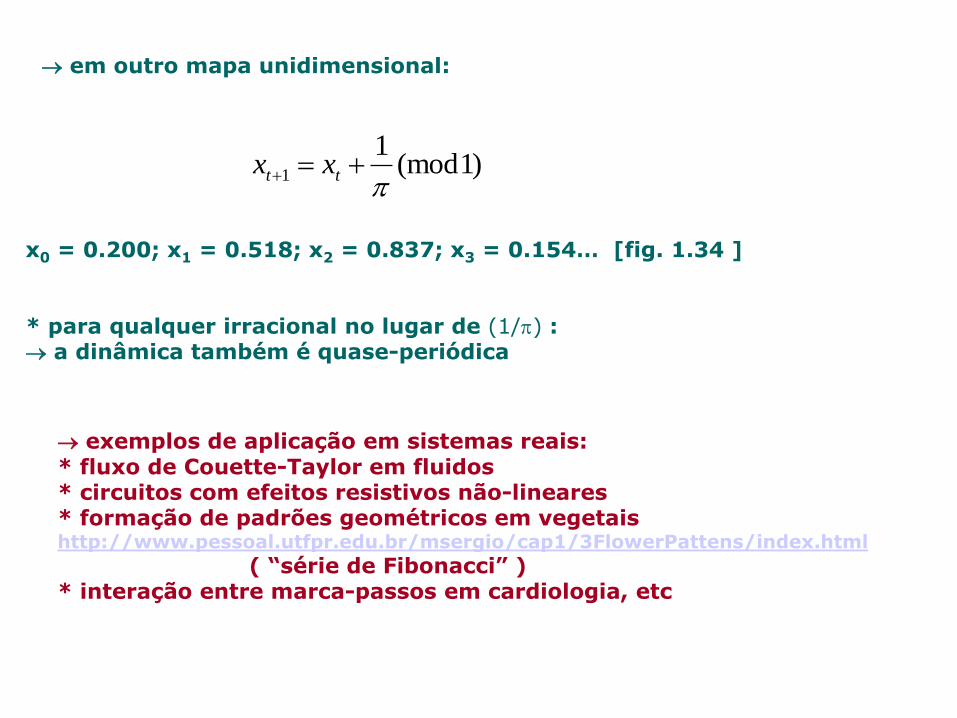
exemplos de aplicação em sistemas reais:* fluxo de Couette-Taylor em fluidos* circuitos com efeitos resistivos não-lineares* formação de padrões geométricos em vegetaishttp://www.pessoal.utfpr.edu.br/msergio/cap1/3FlowerPattens/index.html
( “série de Fibonacci” )* interação entre marca-passos em cardiologia, etc
x0 = 0.200; x1 = 0.518; x2 = 0.837; x3 = 0.154… [fig. 1.34 ]
* para qualquer irracional no lugar de (1/) : a dinâmica também é quase-periódica
)1(mod1
1
tt xx
em outro mapa unidimensional:

terminologia associada a essa dinâmica:( para ocasião de um estudo mais minucioso )
travamento de freqüências ( mode-locking )
número de rotação ( winding number )
toros irracionais
bifurcação de Hopf
rota para o caos de Ruelle-Takens-Newhouse
línguas de Arnold
escada do diabo
atrator estranho não-caótico, etc

produzido na UTFPR!
(PIBIC-JR 2009)
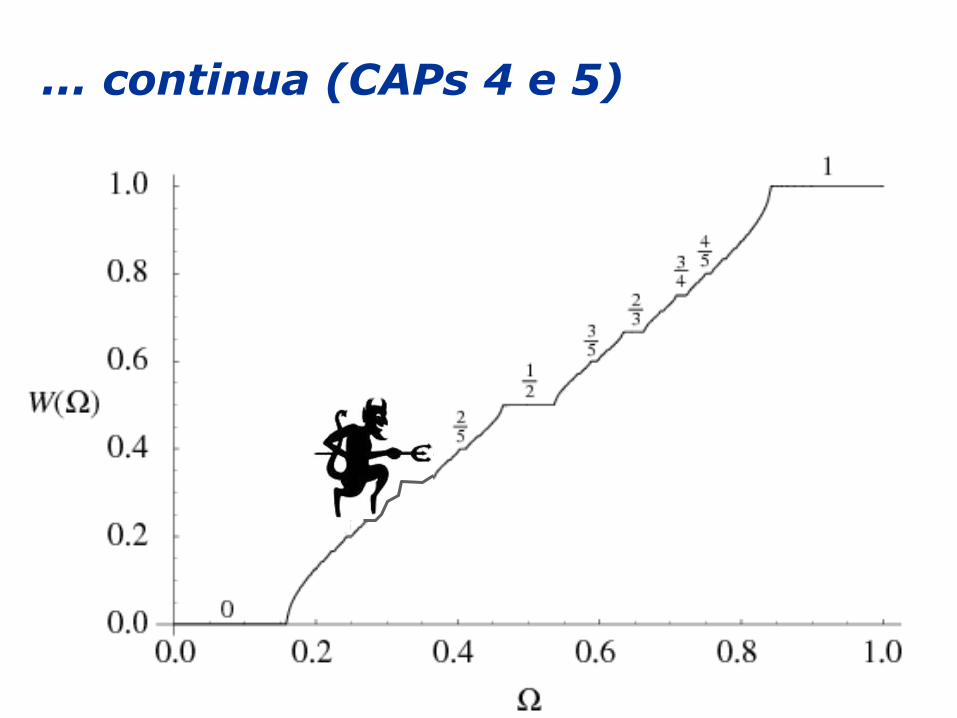
... continua (CAPs 4 e 5)