
Servo sistema para perturbação controlada do …lars.mec.ua.pt/public/LAR...
33
Servo sistema para perturbação controlada do equilíbrio postural Dissertação de Mestrado João Filipe Torres Valente Universidade de Aveiro – Departamento de Engenharia Mecânica Orientador – Prof. Dr. Vítor Manuel Ferreira dos Santos Coorientador – Prof. Dr. António José Monteiro Amaro Junho 2016
Transcript of Servo sistema para perturbação controlada do …lars.mec.ua.pt/public/LAR...
Servo sistema para perturbação controlada do equilíbrio postural
Dissertação de Mestrado
João Filipe Torres Valente
Universidade de Aveiro – Departamento de Engenharia Mecânica
Orientador – Prof. Dr. Vítor Manuel Ferreira dos Santos
Coorientador – Prof. Dr. António José Monteiro Amaro
Junho 2016
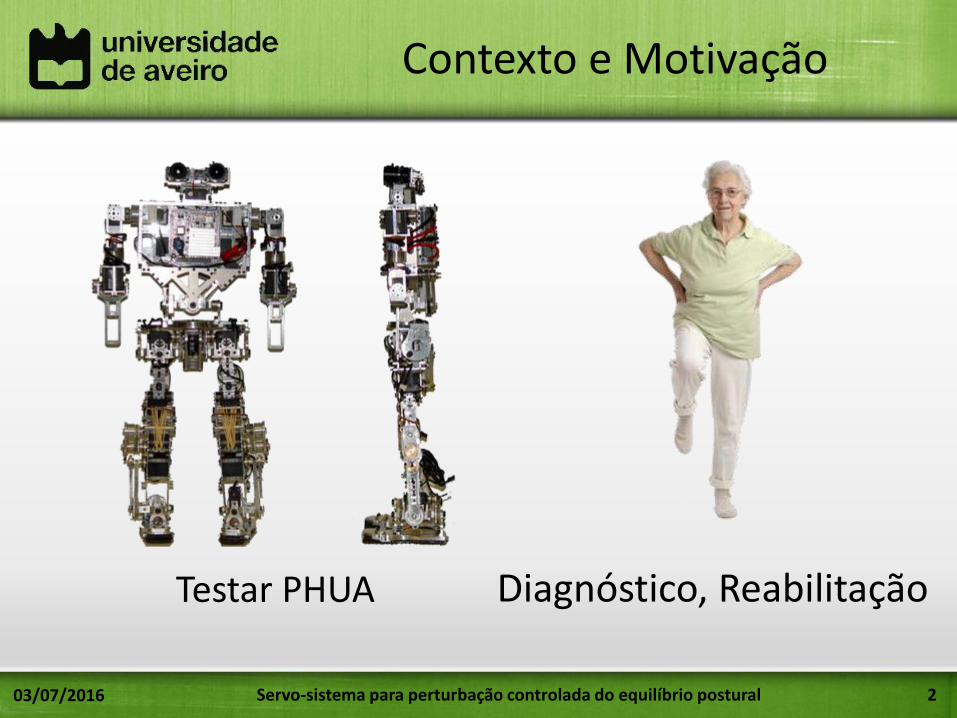
Contexto e Motivação
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 2
Testar PHUA Diagnóstico, Reabilitação
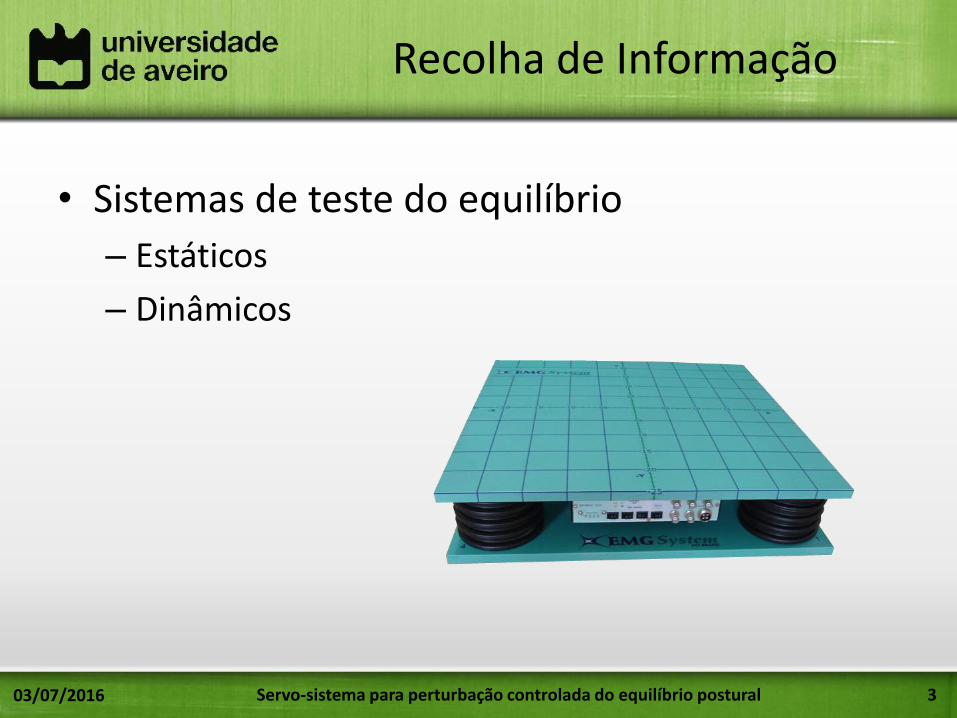
Recolha de Informação
• Sistemas de teste do equilíbrio
– Estáticos
– Dinâmicos
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 3

Recolha de Informação
• Estimulo aplicado sob o pé
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 4
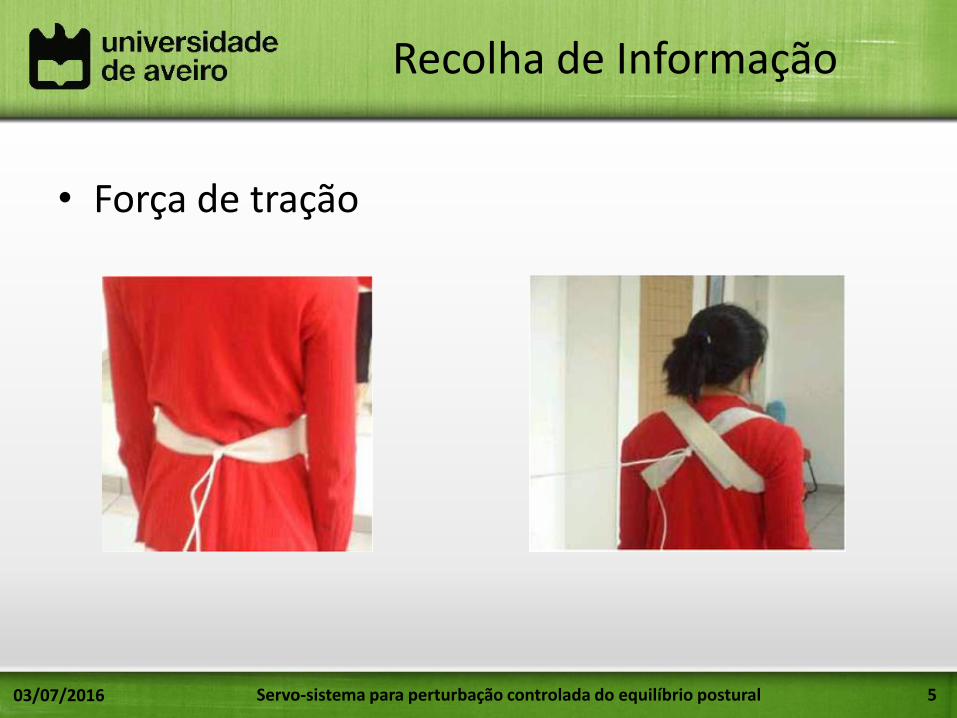
Recolha de Informação
• Força de tração
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 5
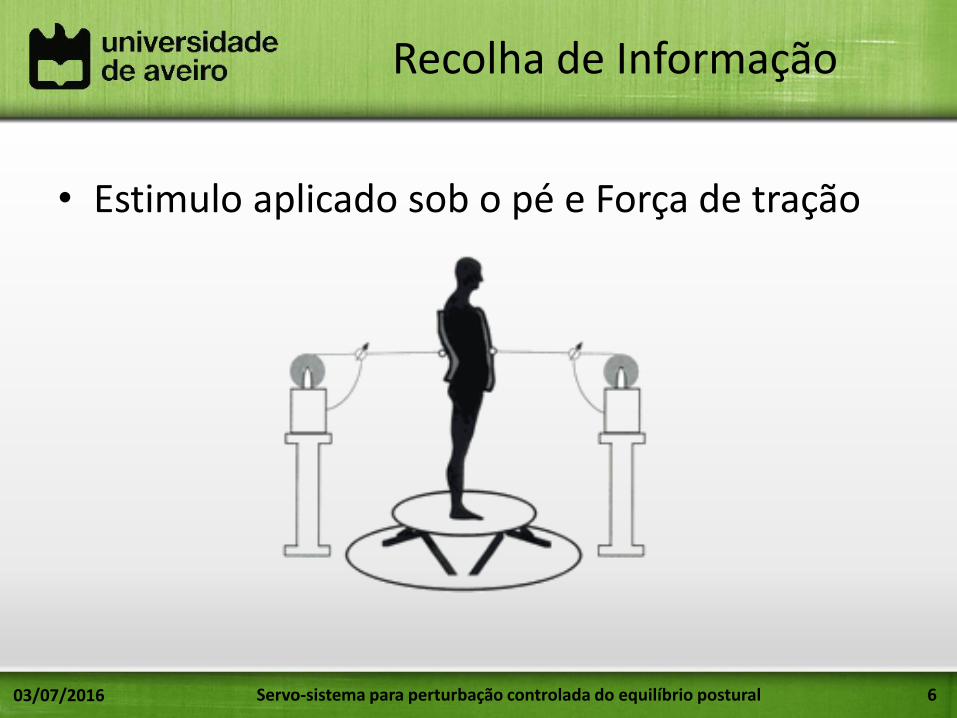
Recolha de Informação
• Estimulo aplicado sob o pé e Força de tração
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 6
Descrição do Problema
• Aplicar perturbação de equilíbrio
– Repetível
– Automática
– Mesurável
– Segura
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 7
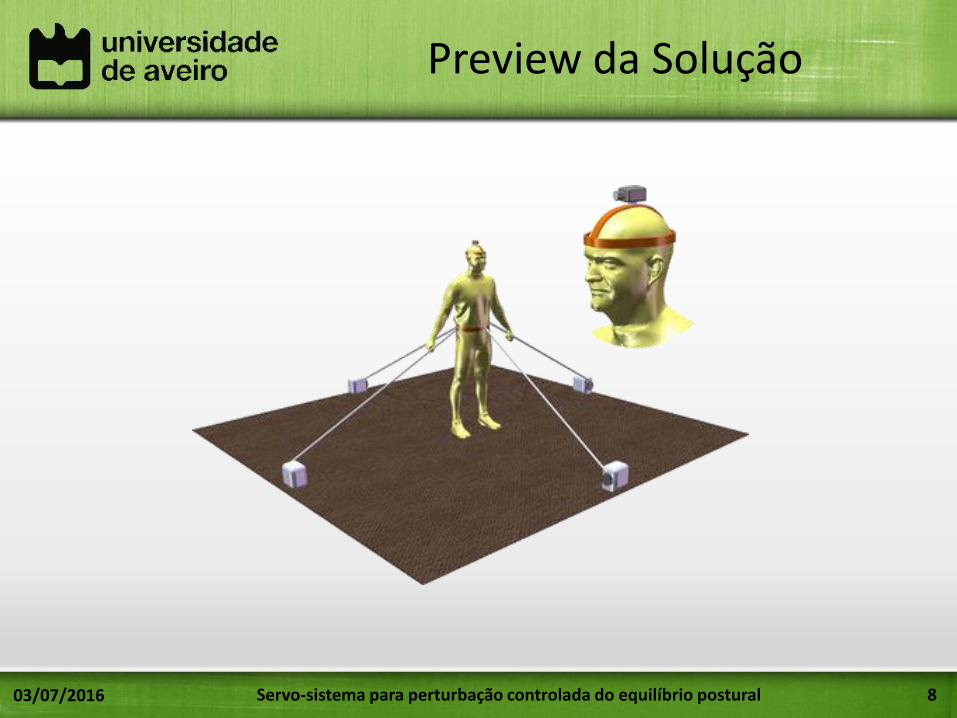
Preview da Solução
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 8
Objectivos
• Desenvolver um mecanismo para testar o conceito.
• Desenvolver e aplicar estímulos no sistema mecânico para avaliar a consistência do conceito.
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 9

Servomotor
• RX-64
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 10
• Deti Dynamixel Interface
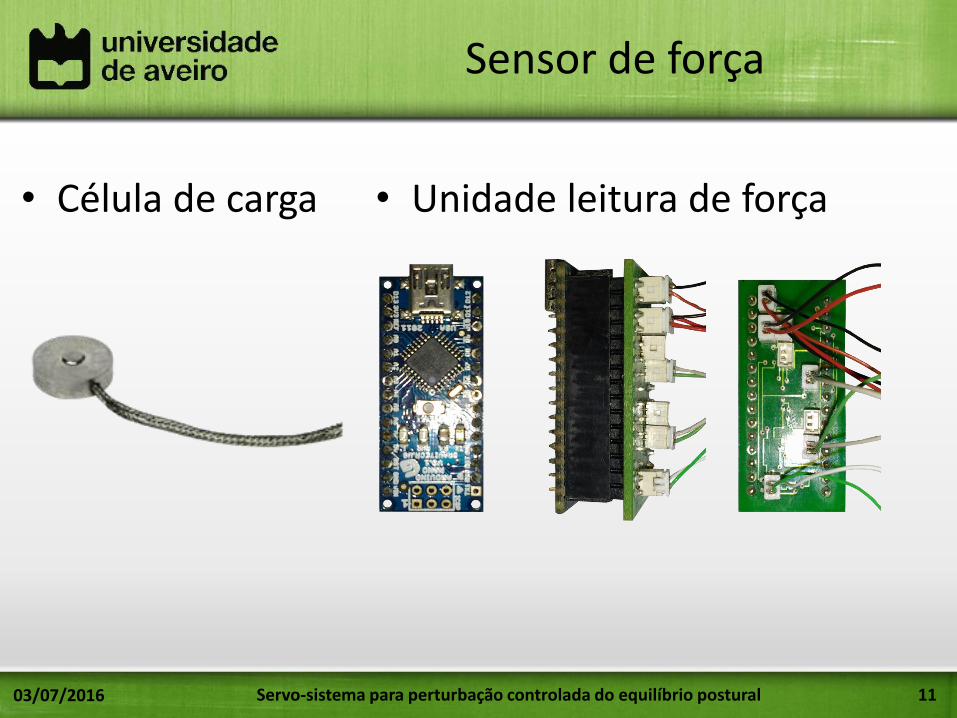
Sensor de força
• Célula de carga
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 11
• Unidade leitura de força
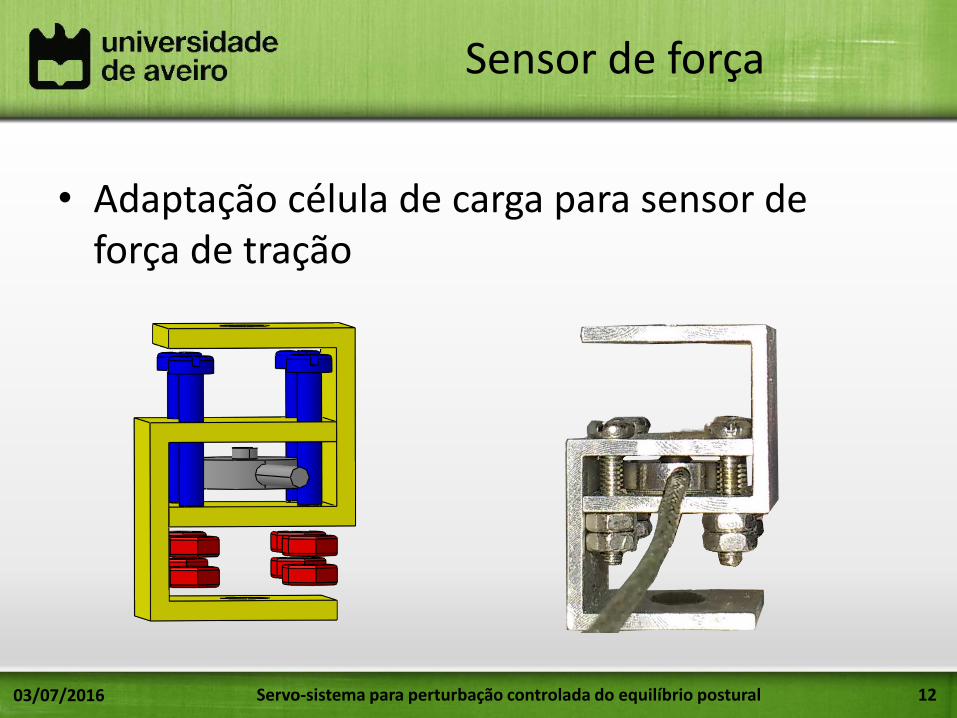
Sensor de força
• Adaptação célula de carga para sensor de força de tração
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 12

Sensor de força
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 13
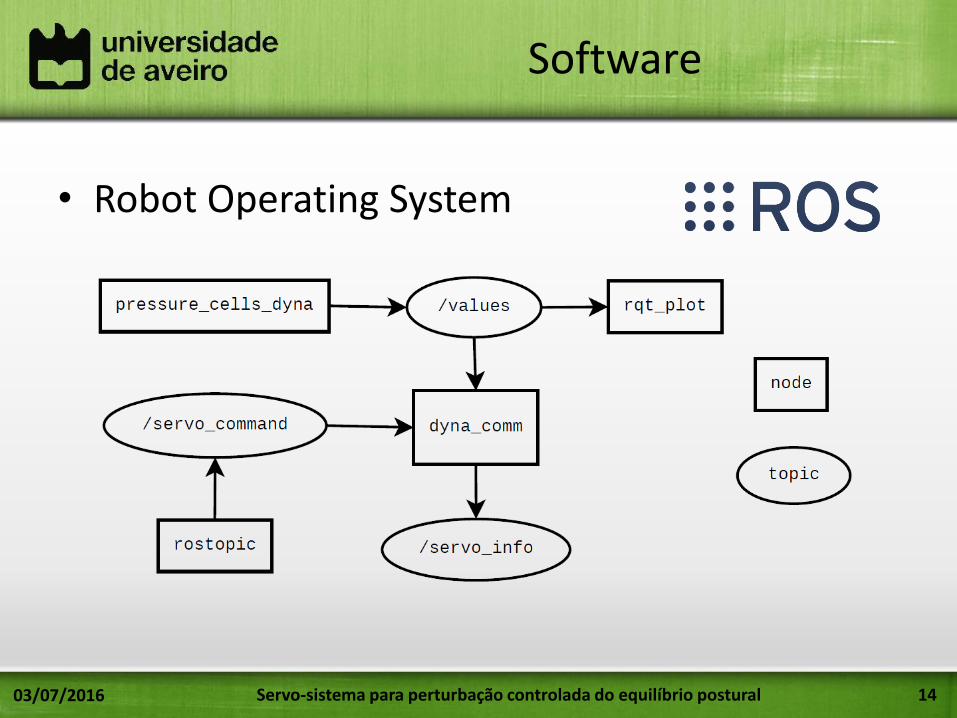
Software
• Robot Operating System
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 14

Experiências com um Pêndulo Invertido
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 15
Servomotor Roldana
Elástico Corda
Sensor força Massa
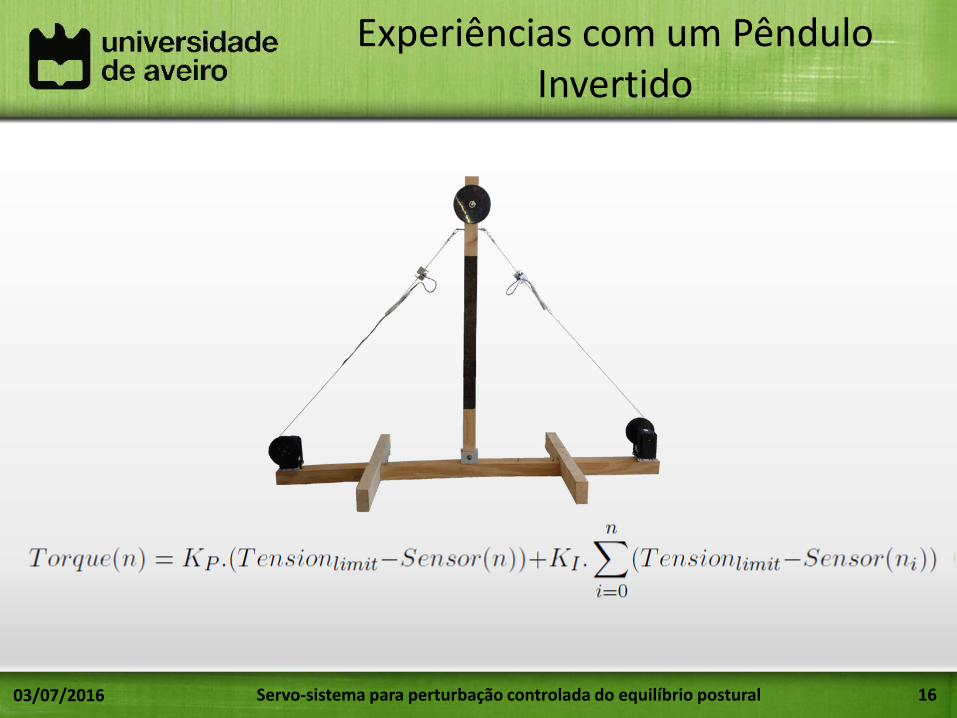
Experiências com um Pêndulo Invertido
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 16
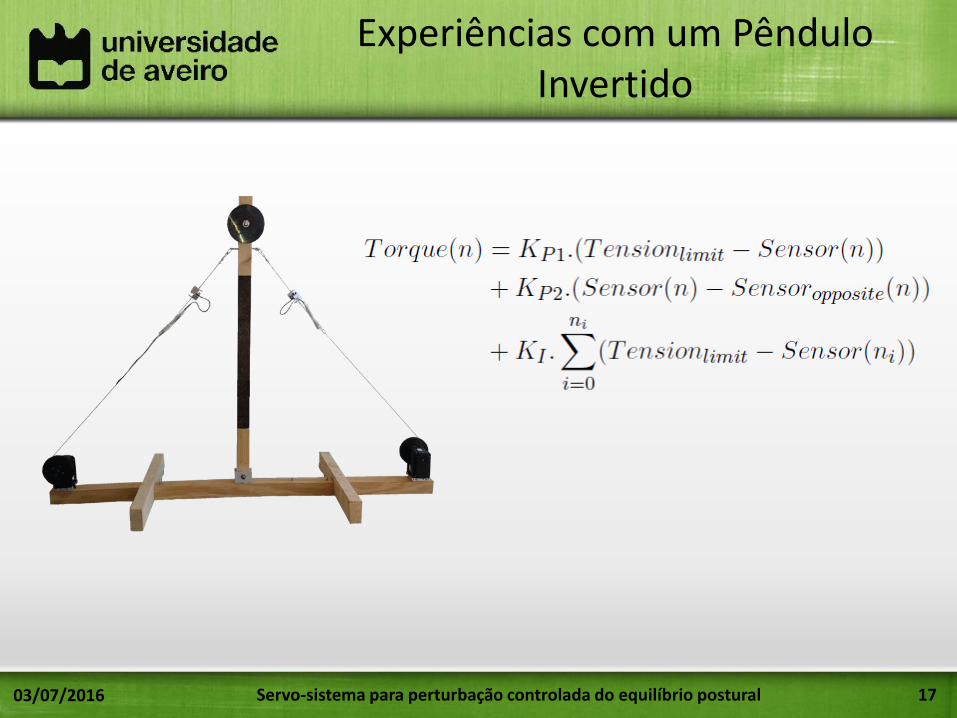
Experiências com um Pêndulo Invertido
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 17
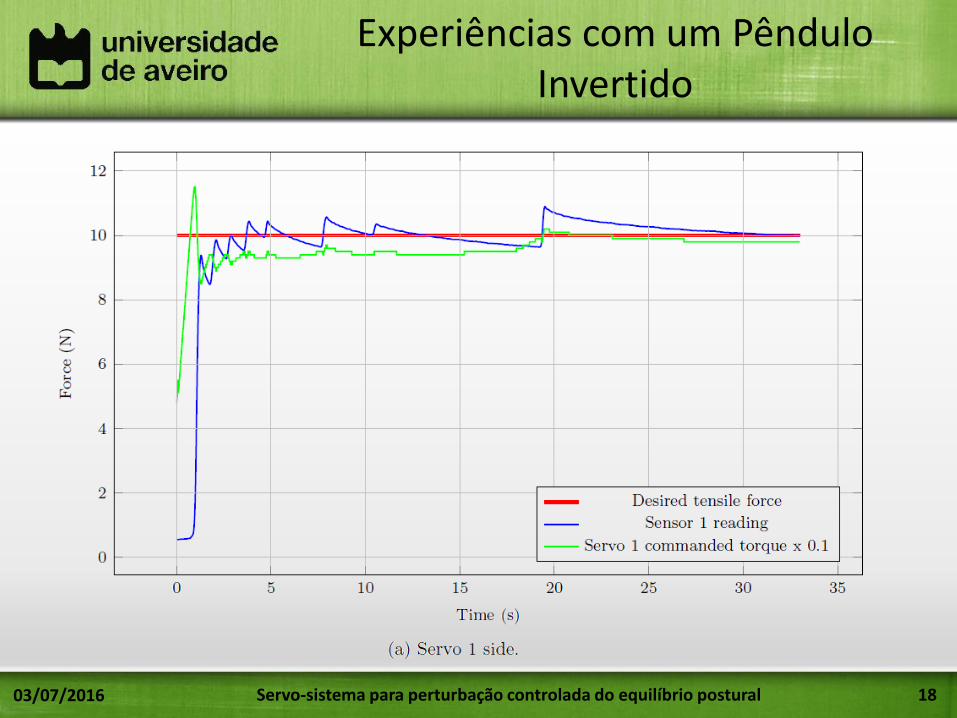
Experiências com um Pêndulo Invertido
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 18
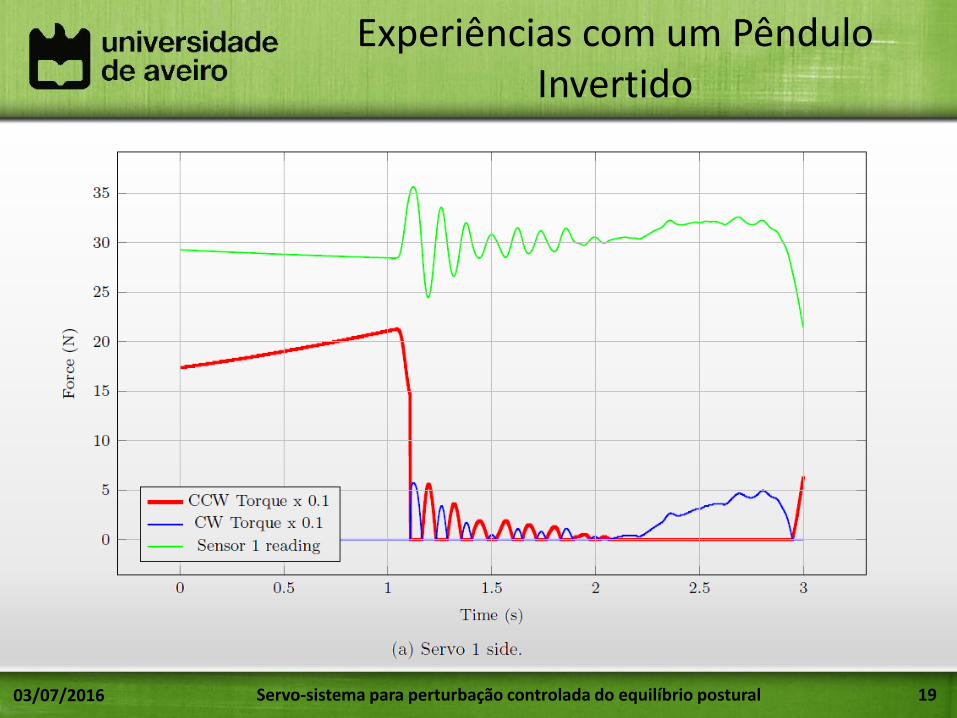
Experiências com um Pêndulo Invertido
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 19

Experiências com um Pêndulo Invertido
• Mais Binário
• Melhor Resolução
• Mais Modos de Controlo
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 20
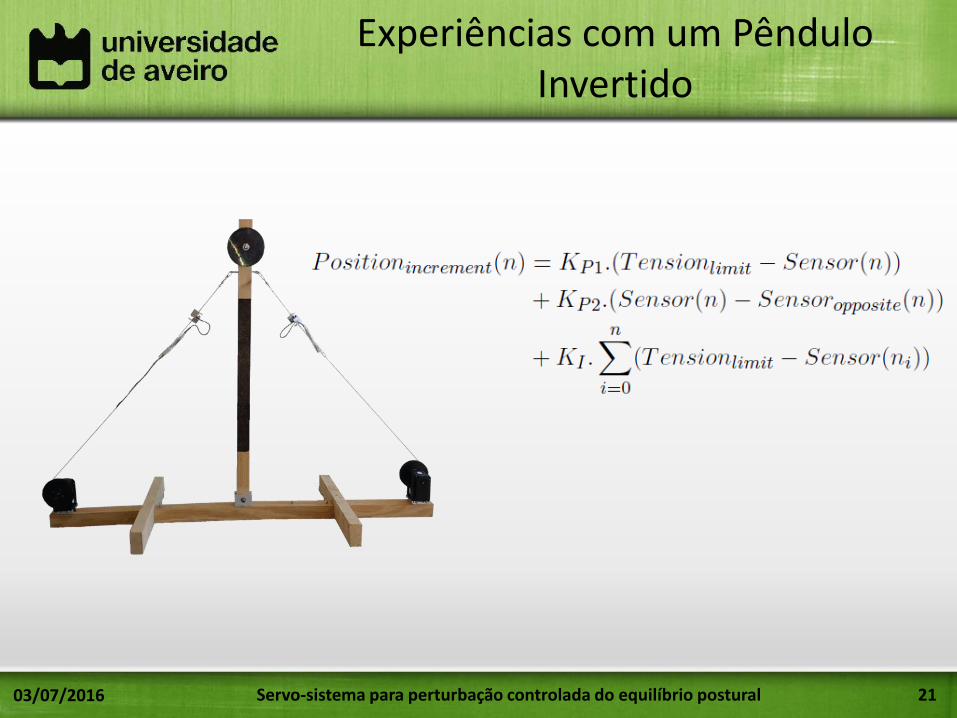
Experiências com um Pêndulo Invertido
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 21
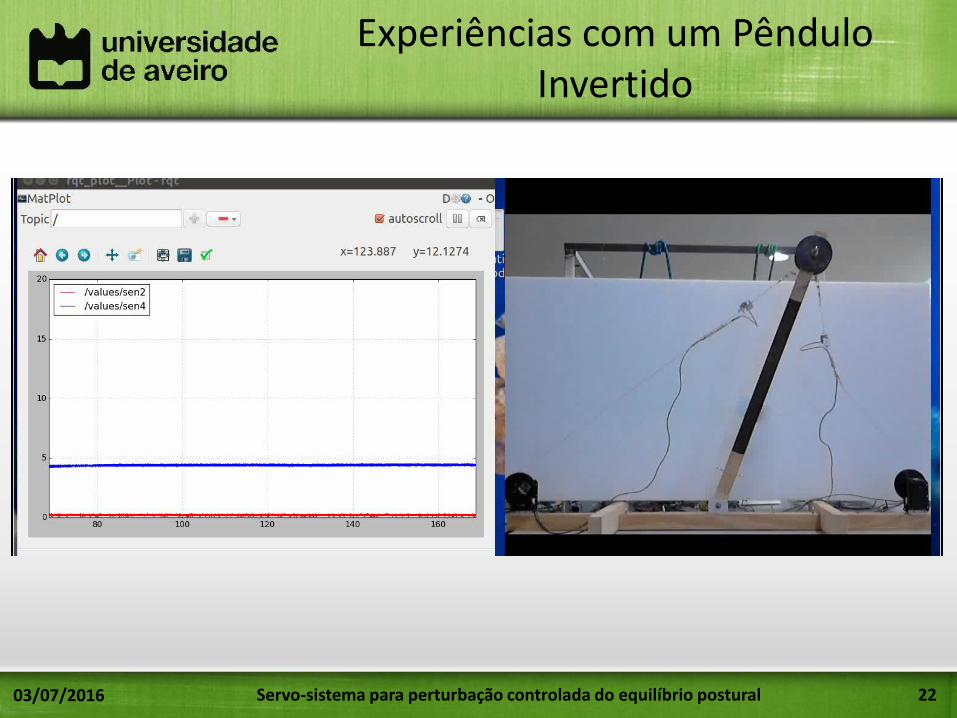
Experiências com um Pêndulo Invertido
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 22

Aplicação de Estímulos
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 23
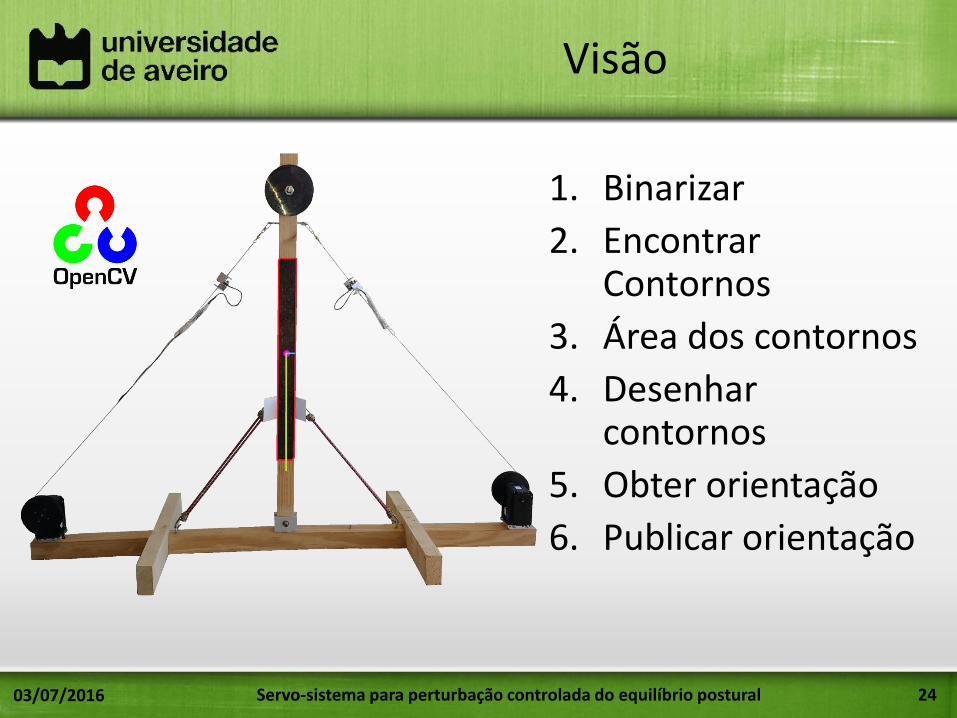
Visão
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 24
1. Binarizar
2. Encontrar Contornos
3. Área dos contornos
4. Desenhar contornos
5. Obter orientação
6. Publicar orientação
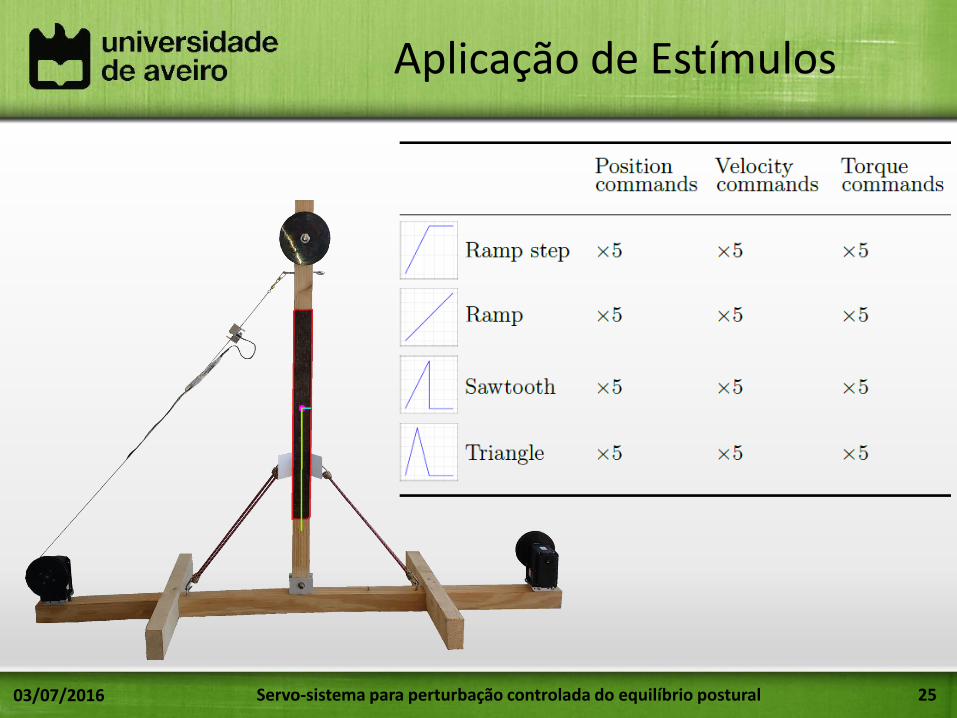
Aplicação de Estímulos
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 25
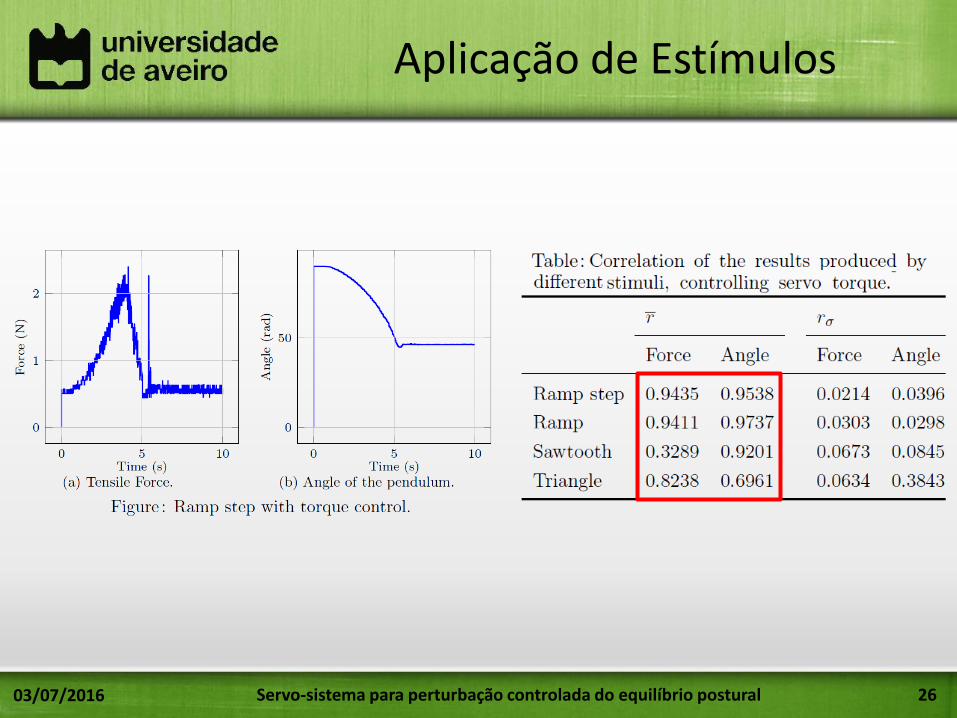
Aplicação de Estímulos
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 26
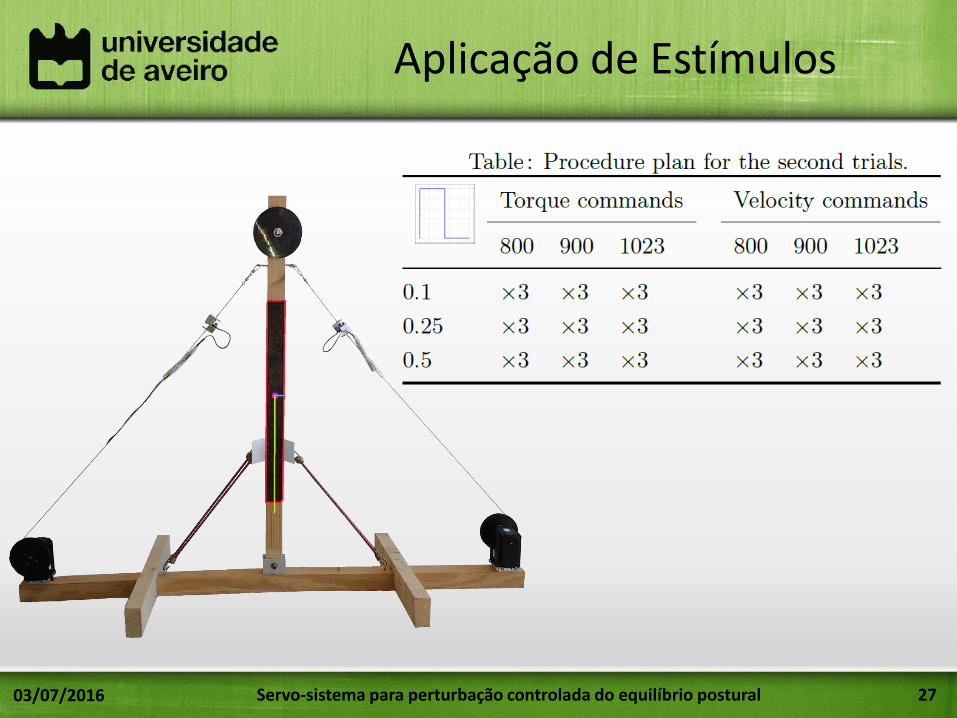
Aplicação de Estímulos
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 27
Aplicação de Estímulos
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 28
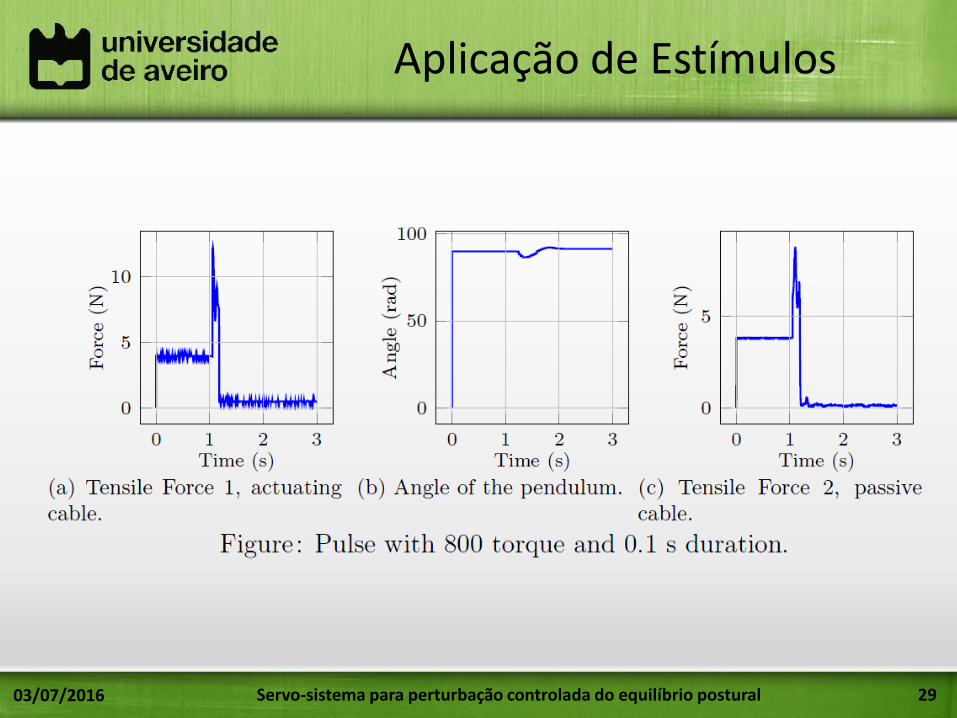
Aplicação de Estímulos
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 29
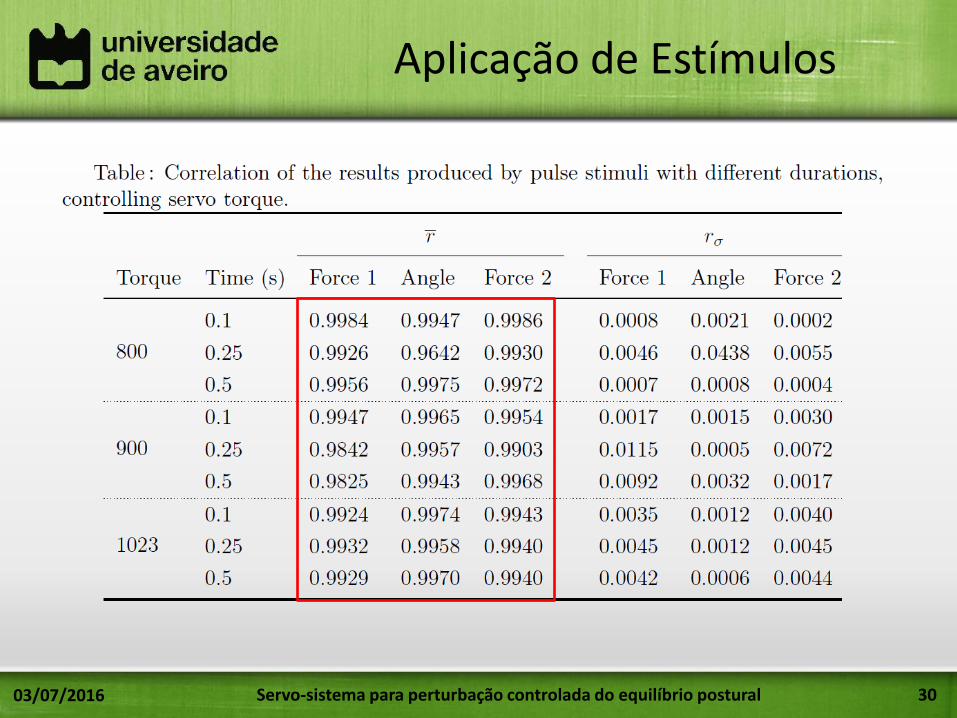
Aplicação de Estímulos
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 30
Conclusões
• Hardware e software desenvolvido e implementado
– Mecanismo tração compressão
– Controlo servomotores
– Visão
– Aquisição e tratamento de dados
• Mecanismo para testar o conceito foi desenvolvido
• Foram aplicados estímulos que demonstraram a consistência do conceito
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 31
Trabalho Futuro
• Influência das condições iniciais
• Simular e equacionar o sistema
• Testar mais estímulos
• Modo de controlo dos servos ou outros motores
• Considerar tornar o sistema mais lento
• Criar uma interface gráfica para controlar e monitorar o sistema
• Criar uma estrutura física para aplicar estímulos utilizando quatro servos
03/07/2016 Servo-sistema para perturbação controlada do equilíbrio postural 32
Servo sistema para perturbação controlada do equilíbrio postural
Dissertação de Mestrado
João Filipe Torres Valente
Universidade de Aveiro – Departamento de Engenharia Mecânica
Orientador – Prof. Dr. Vítor Manuel Ferreira dos Santos
Coorientador – Prof. Dr. António José Monteiro Amaro
Junho 2016


















