ROBÓTICA (ROB74) –AULA 2 - joinville.ifsc.edu.brmichael.klug/ROB74/Aulas/aula2_trans... ·...
27
ROBÓTICA (ROB74) – AULA 2 TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS PROF.: Michael Klug
Transcript of ROBÓTICA (ROB74) –AULA 2 - joinville.ifsc.edu.brmichael.klug/ROB74/Aulas/aula2_trans... ·...
ROBÓTICA (ROB74) – AULA 2
TRANSFORMAÇÕES GEOMÉTRICAS E COORDENADAS HOMOGÊNEAS
PROF.: Michael Klug
PROGRAMA
• Transformações Geométricas e Coordenadas Homogêneas– Notações Introdutórias
• Vetores, matrizes, pontos e referenciais
– Transformações Geométricas Elementares– Coordenadas Homogêneas–Matrizes de Transformação a 3 dimensões– Orientação e Ângulos de Euler (RPY)
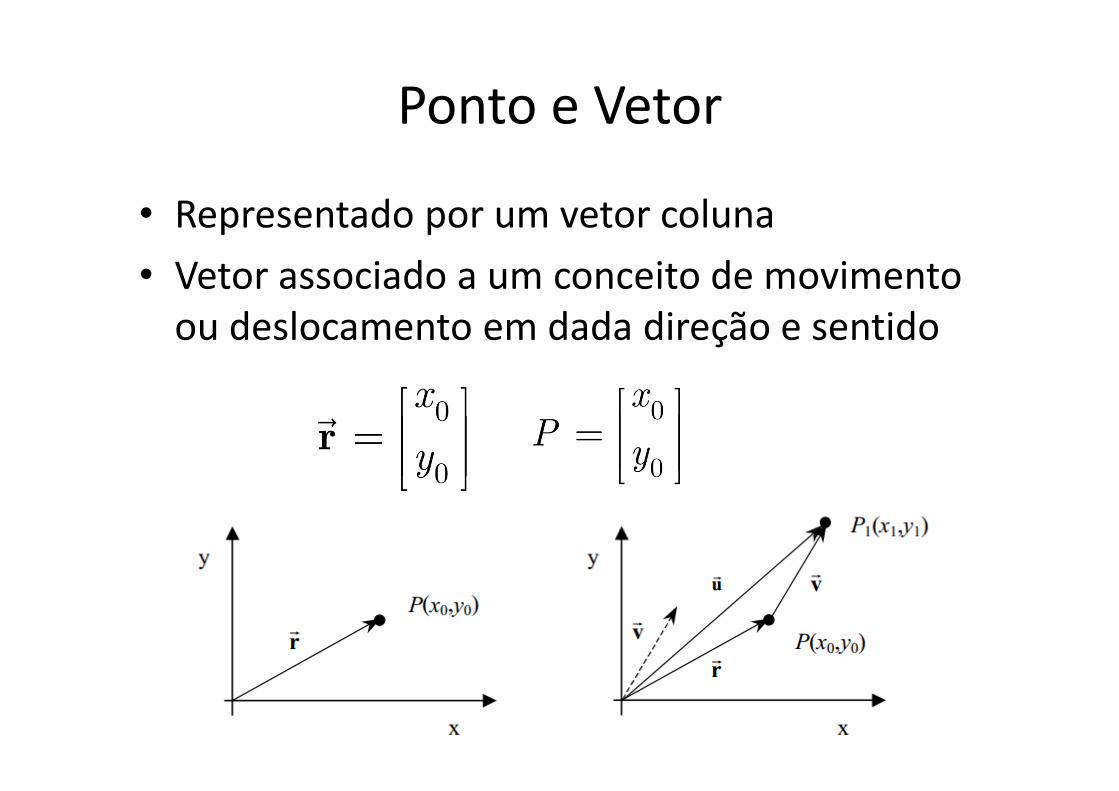
Ponto e Vetor
• Representado por um vetor coluna• Vetor associado a um conceito de movimento ou deslocamento em dada direção e sentido
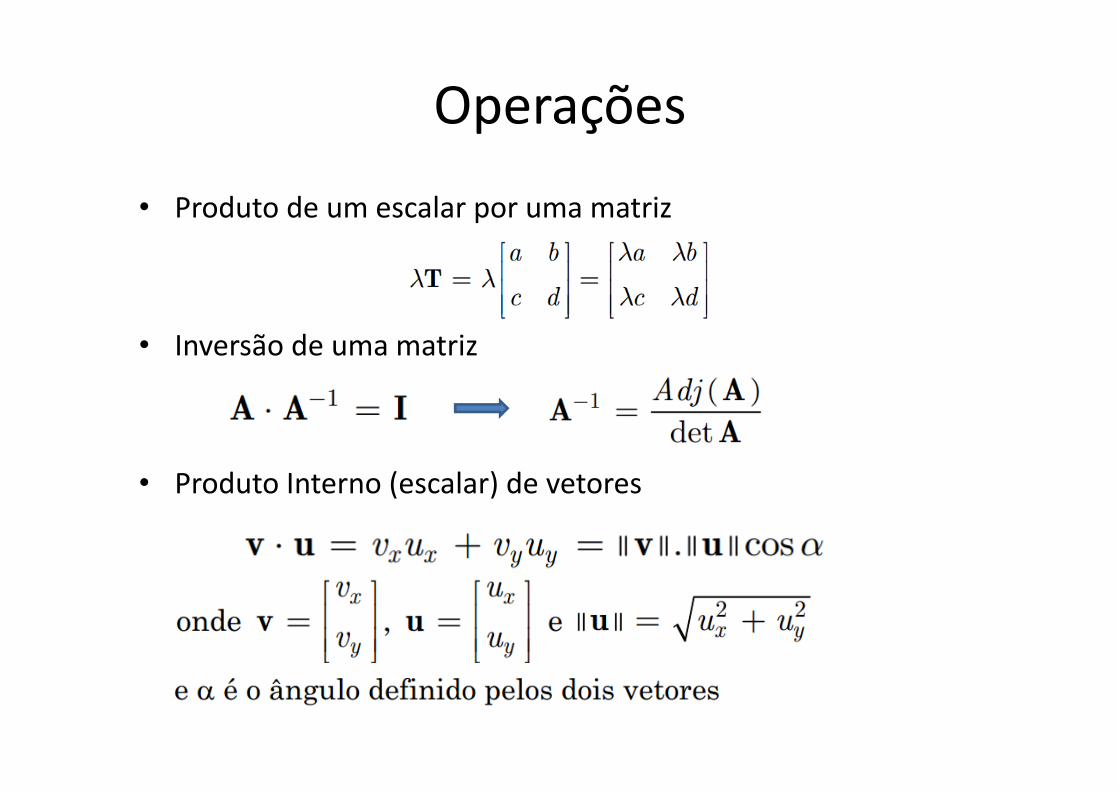
Operações
• Produto de um escalar por uma matriz
• Inversão de uma matriz
• Produto Interno (escalar) de vetores
Operações
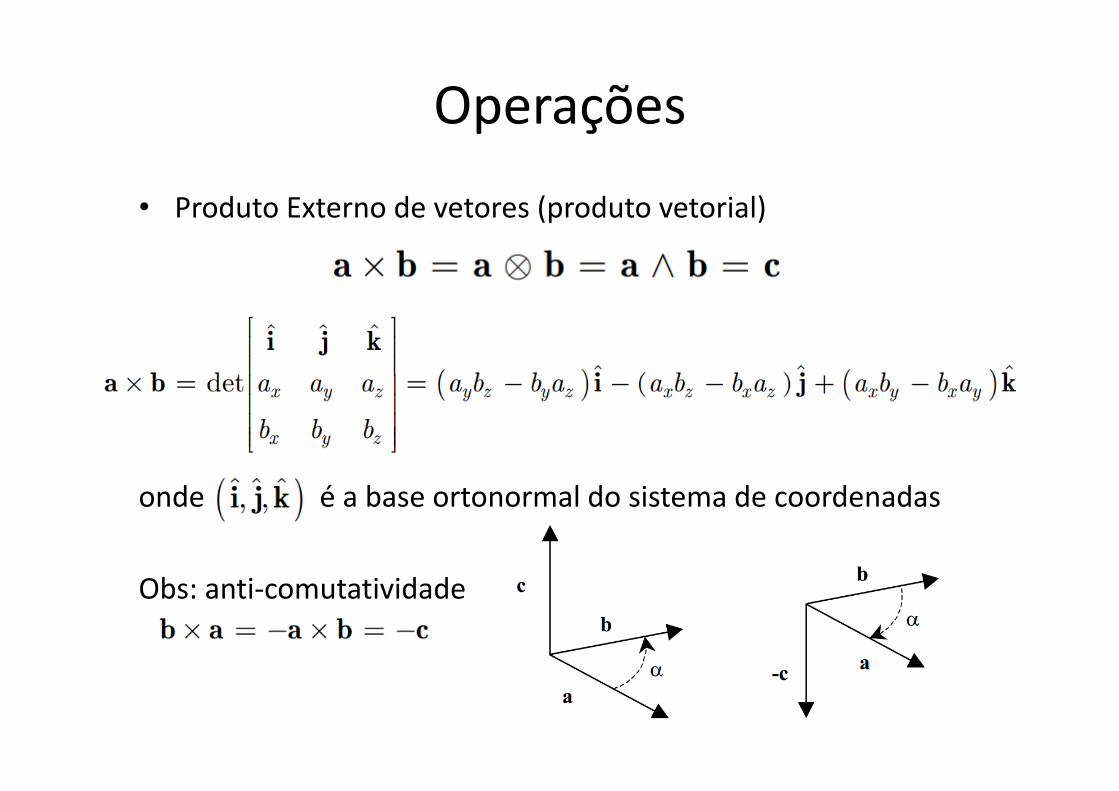
• Produto Externo de vetores (produto vetorial)
onde é a base ortonormal do sistema de coordenadas
Obs: anti‐comutatividade
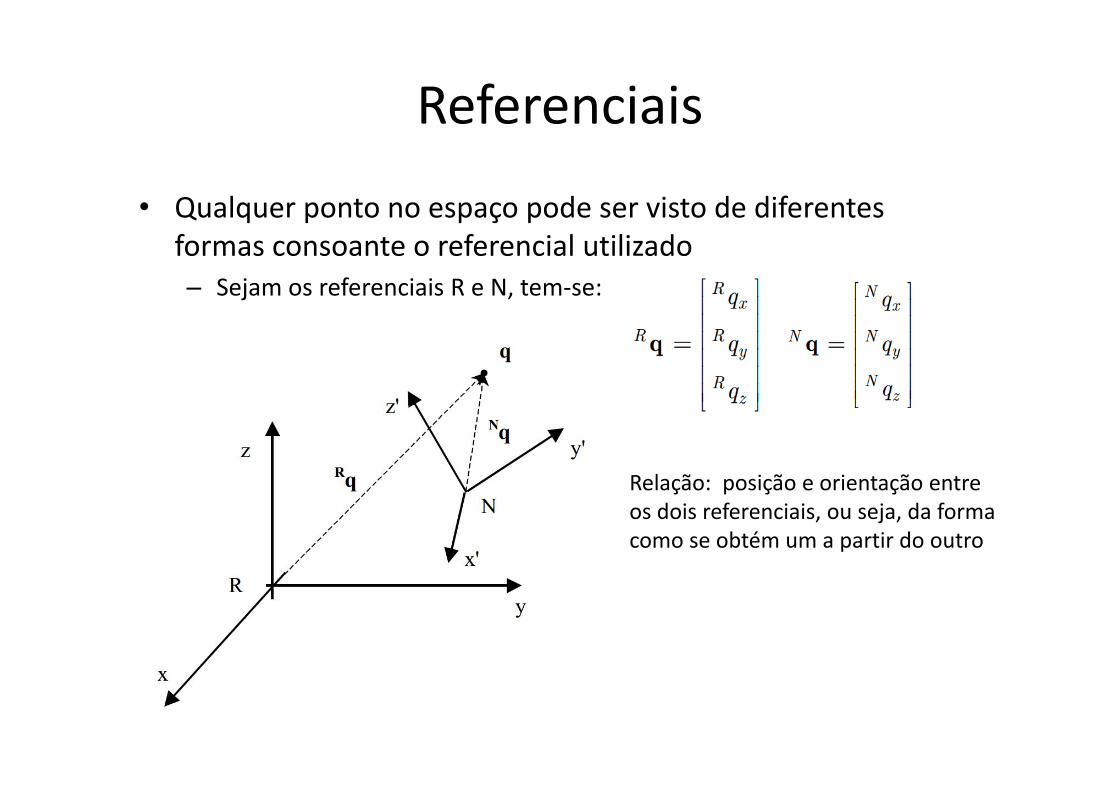
Referenciais
• Qualquer ponto no espaço pode ser visto de diferentes formas consoante o referencial utilizado– Sejam os referenciais R e N, tem‐se:
Relação: posição e orientação entre os dois referenciais, ou seja, da forma como se obtém um a partir do outro
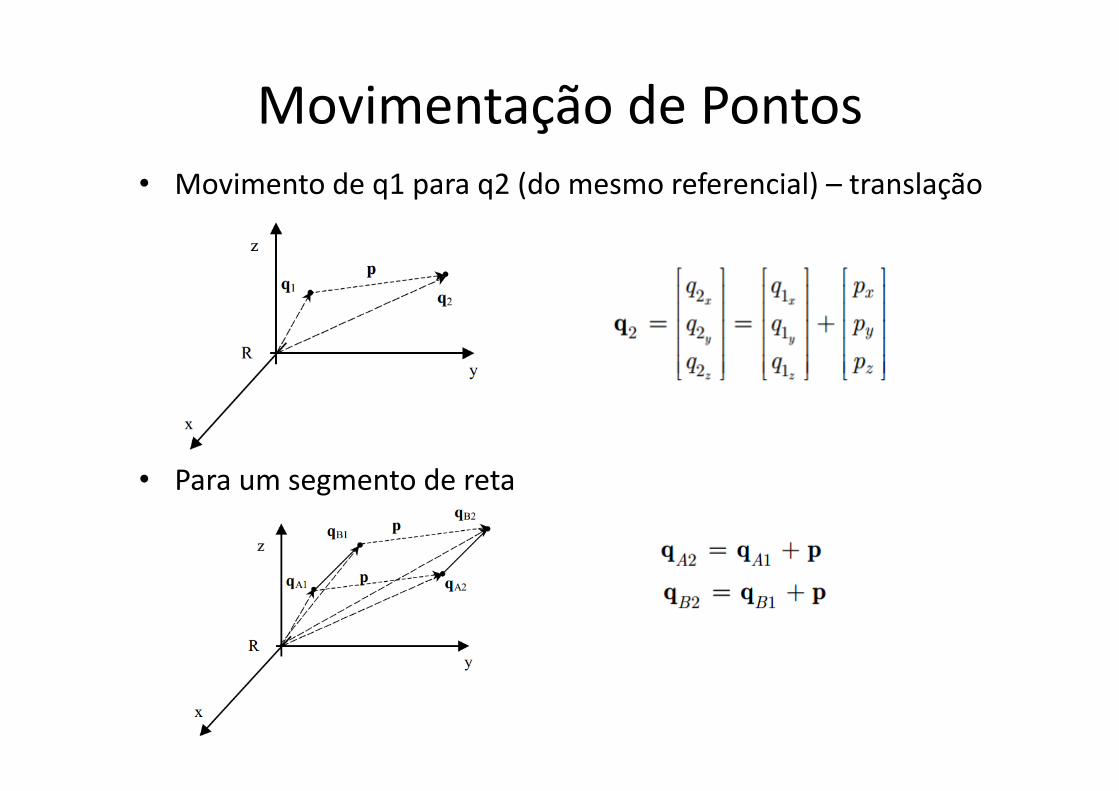
Movimentação de Pontos• Movimento de q1 para q2 (do mesmo referencial) – translação
• Para um segmento de reta
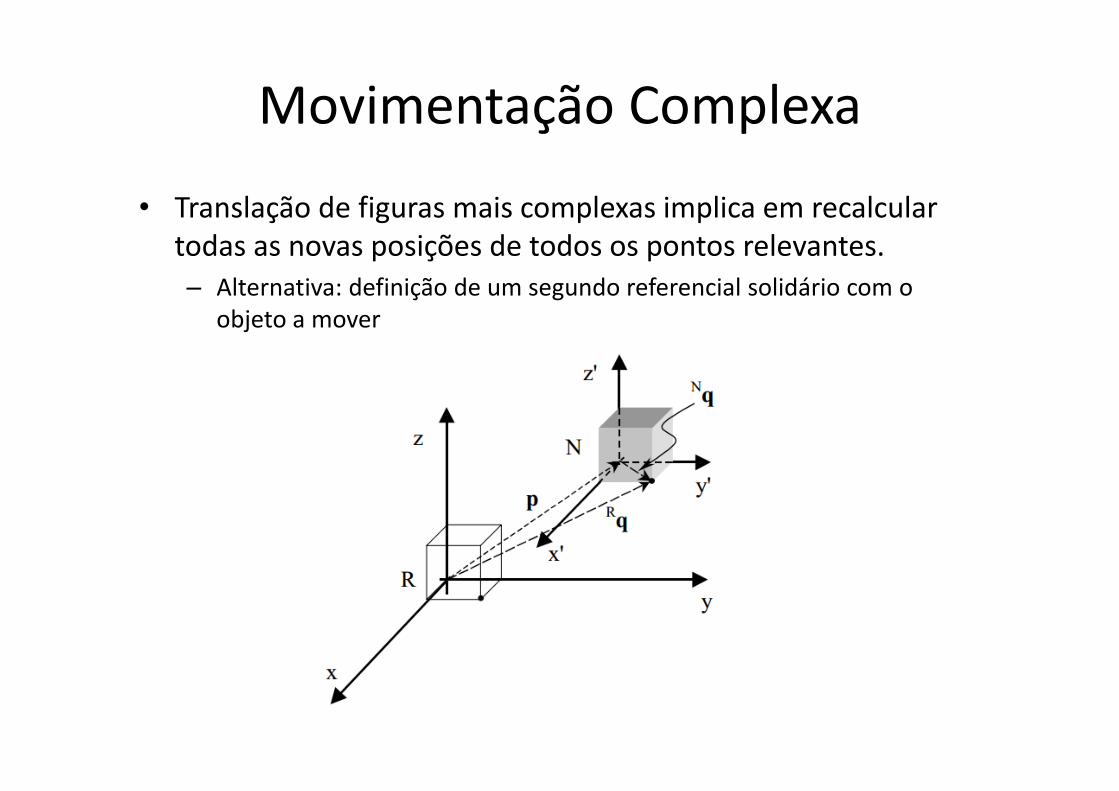
Movimentação Complexa
• Translação de figuras mais complexas implica em recalcular todas as novas posições de todos os pontos relevantes. – Alternativa: definição de um segundo referencial solidário com o
objeto a mover
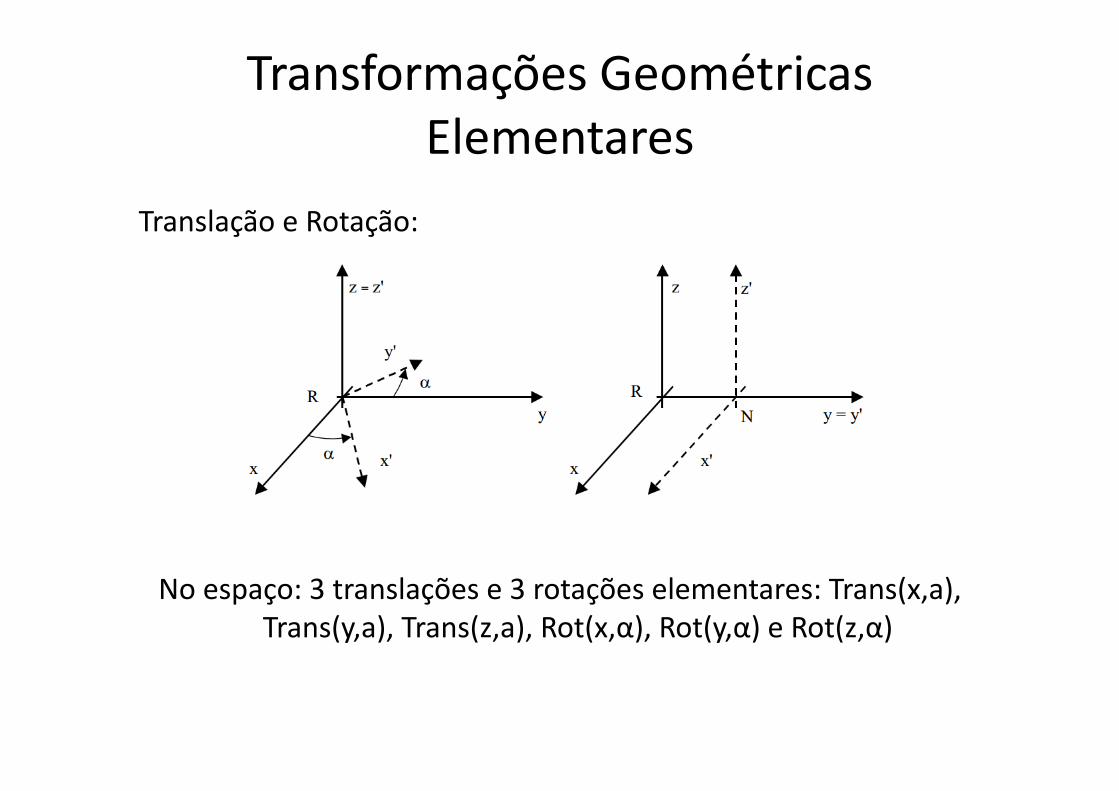
Transformações Geométricas Elementares
Translação e Rotação:
No espaço: 3 translações e 3 rotações elementares: Trans(x,a), Trans(y,a), Trans(z,a), Rot(x,α), Rot(y,α) e Rot(z,α)
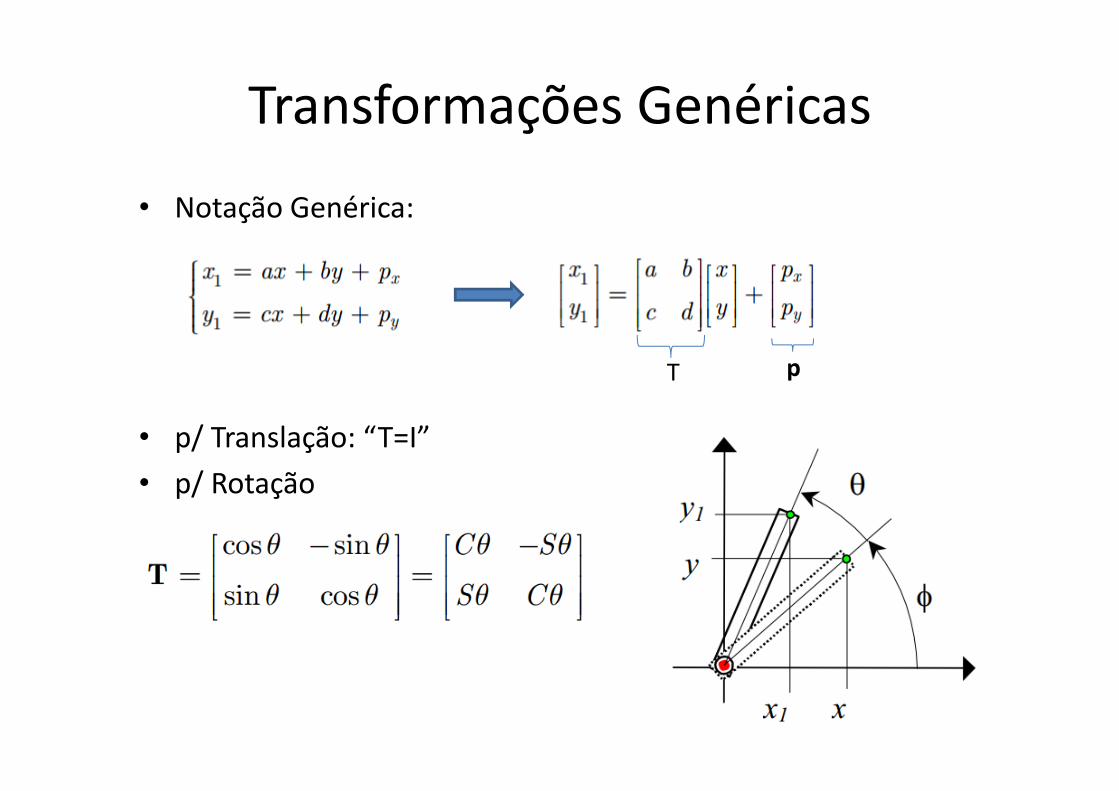
Transformações Genéricas
• Notação Genérica:
• p/ Translação: “T=I”• p/ Rotação
T p
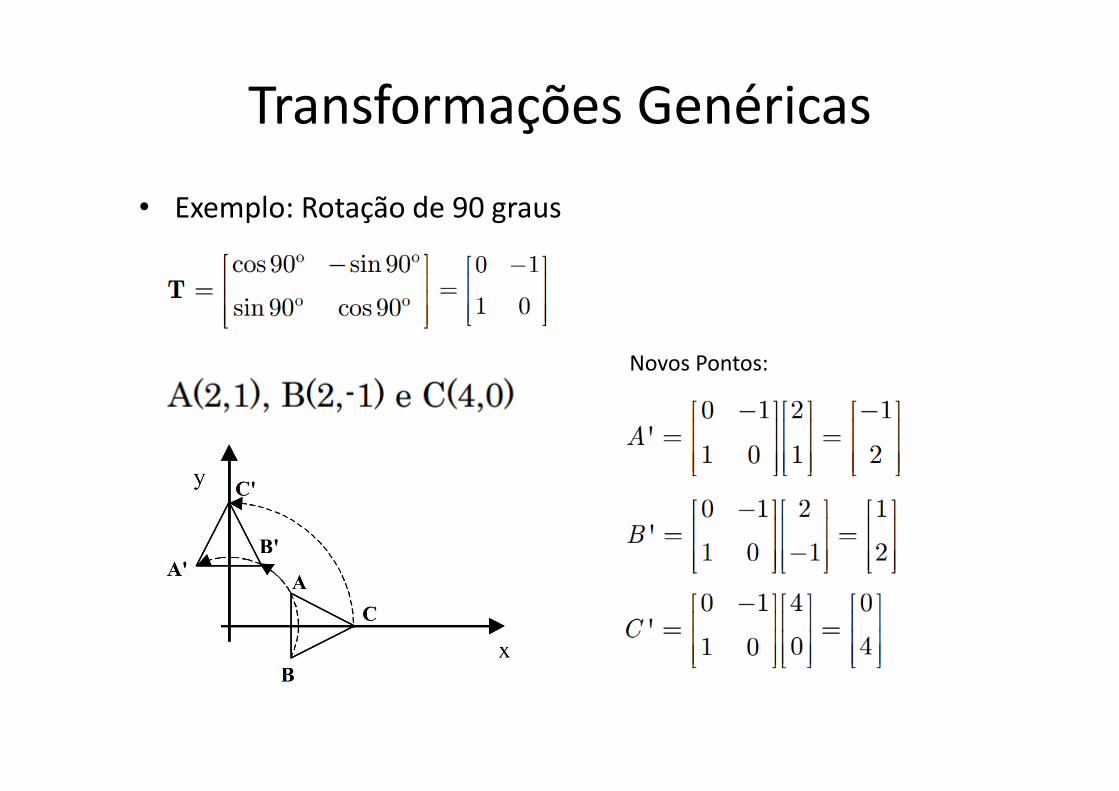
• Exemplo: Rotação de 90 graus
Transformações Genéricas
Novos Pontos:
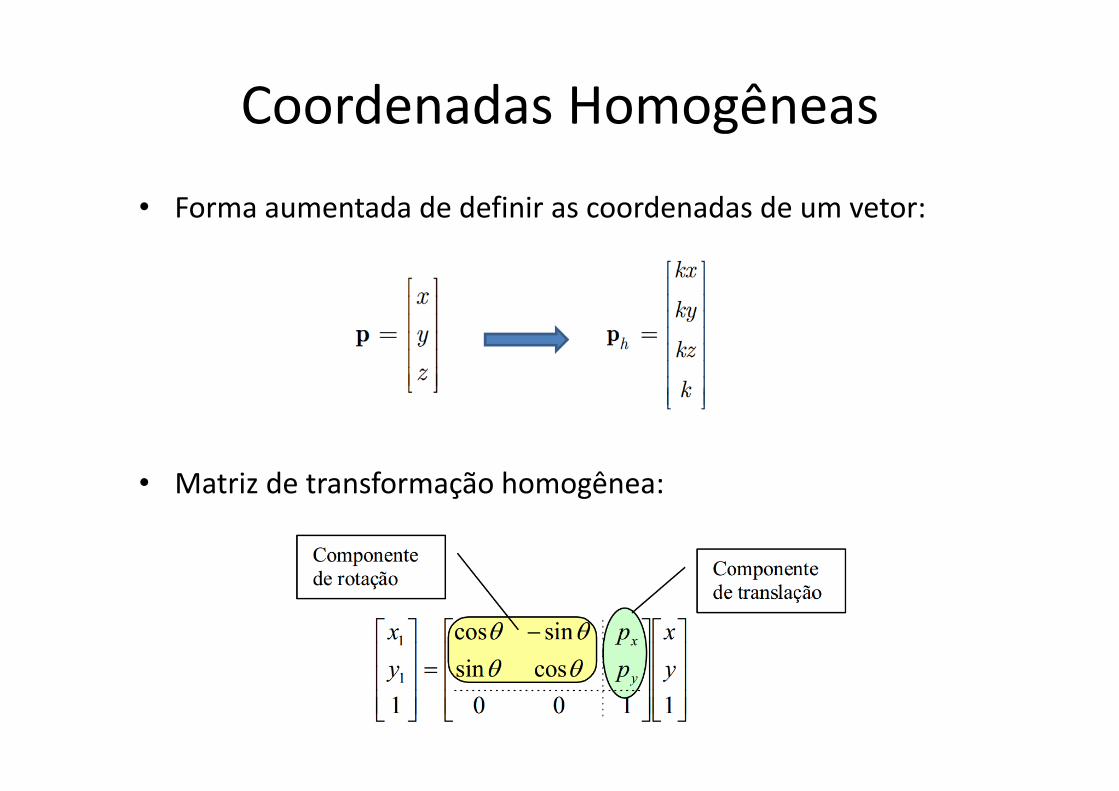
• Forma aumentada de definir as coordenadas de um vetor:
• Matriz de transformação homogênea:
Coordenadas Homogêneas

• Uma sucessão de transformações traduz‐se na multiplicação das diversas transformações
• IMPORTANTE!!! A ordem das multiplicações (operação das transformações) não é necessariamente comutativa (apenas para os casos de translações e rotações puras)
Transformações Compostas
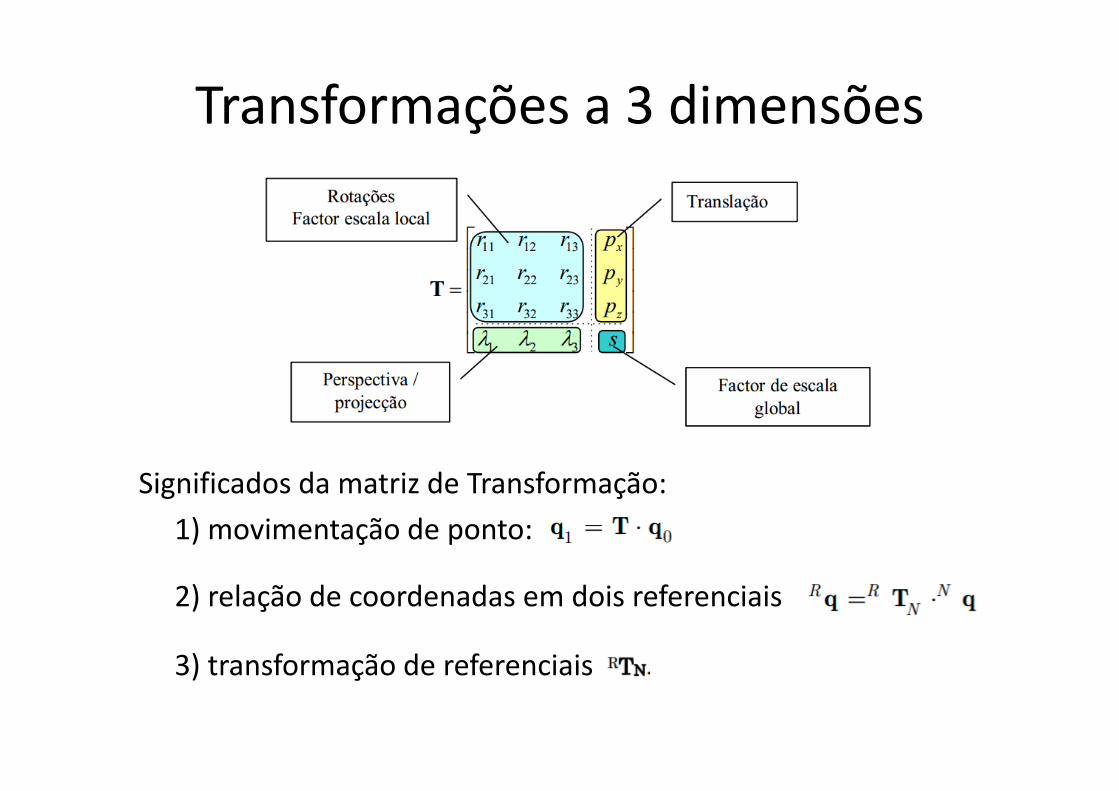
Significados da matriz de Transformação:1) movimentação de ponto:
2) relação de coordenadas em dois referenciais
3) transformação de referenciais
Transformações a 3 dimensões
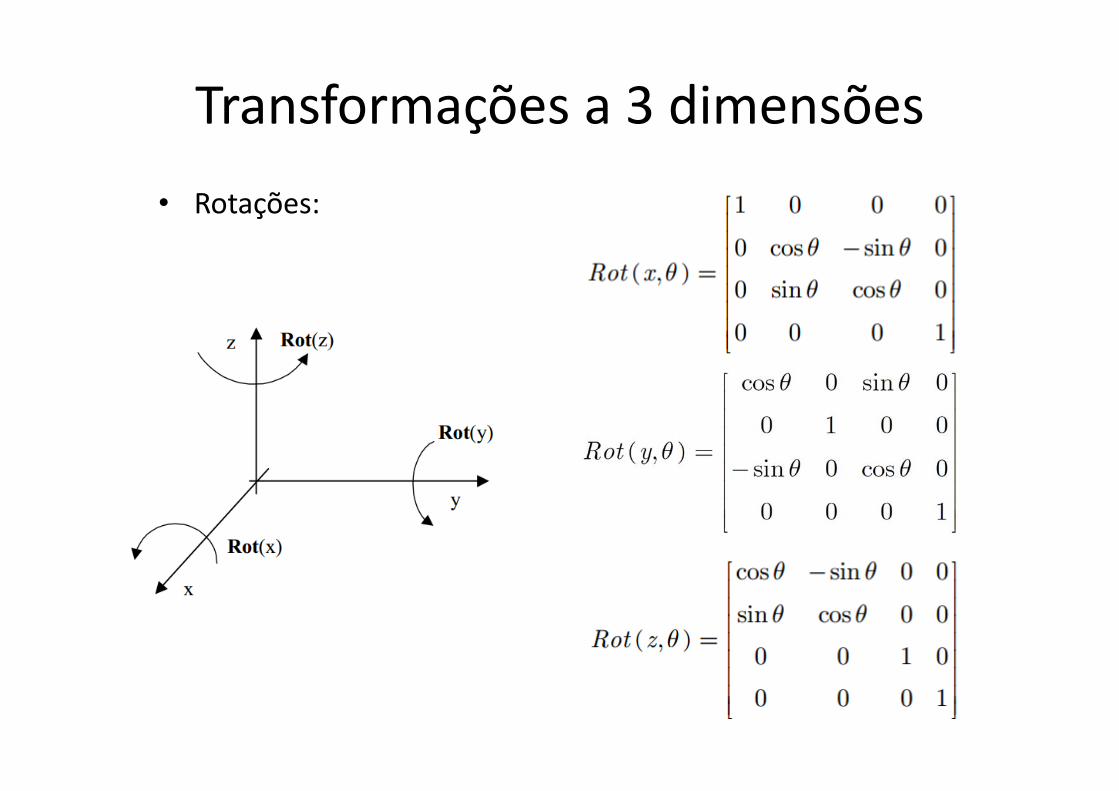
• Rotações:
Transformações a 3 dimensões
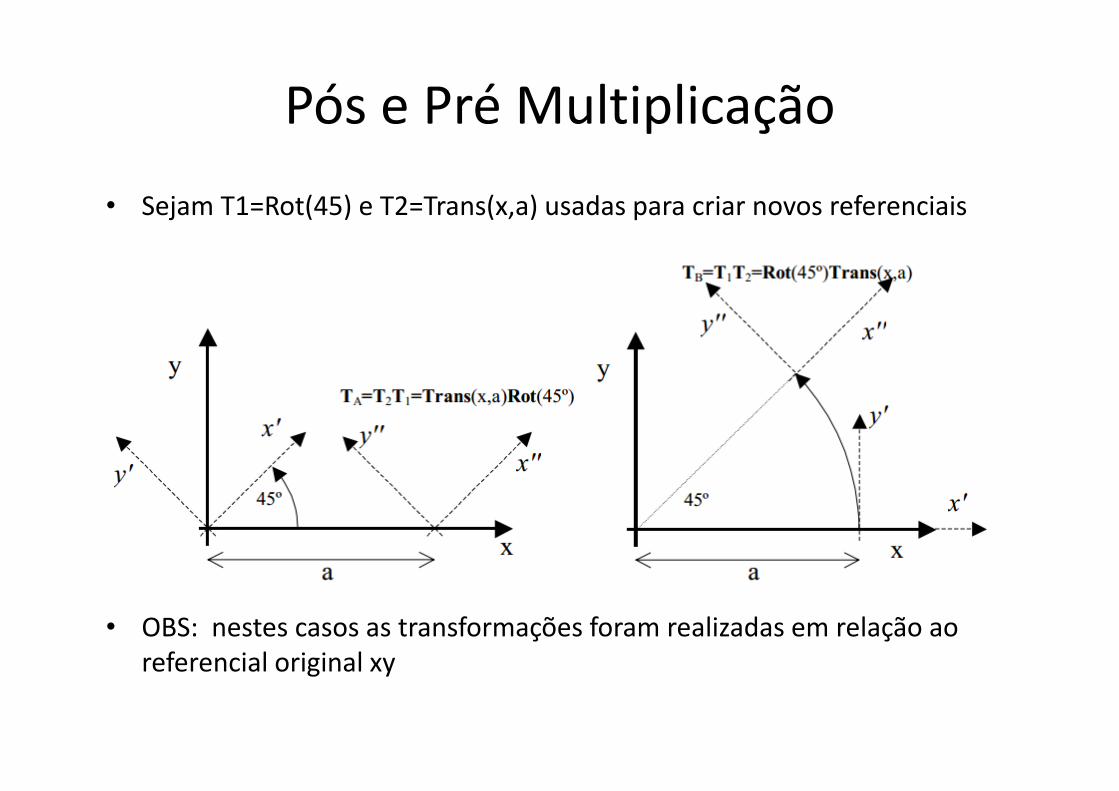
• Sejam T1=Rot(45) e T2=Trans(x,a) usadas para criar novos referenciais
• OBS: nestes casos as transformações foram realizadas em relação ao referencial original xy
Pós e Pré Multiplicação

• Alternativa: aplicar as transformações em relação a cada referencial recém‐criado. Ex: aplicar a rotação e depois a translação ao longo do referencial resultante da rotação
• Conclusão:– Pré: equivale a aplicar a segunda transformação no referencial global– Pós: equivale a aplicar a segunda no novo referencial
Pós e Pré Multiplicação
Coincide com o segundo caso anterior, Tb.
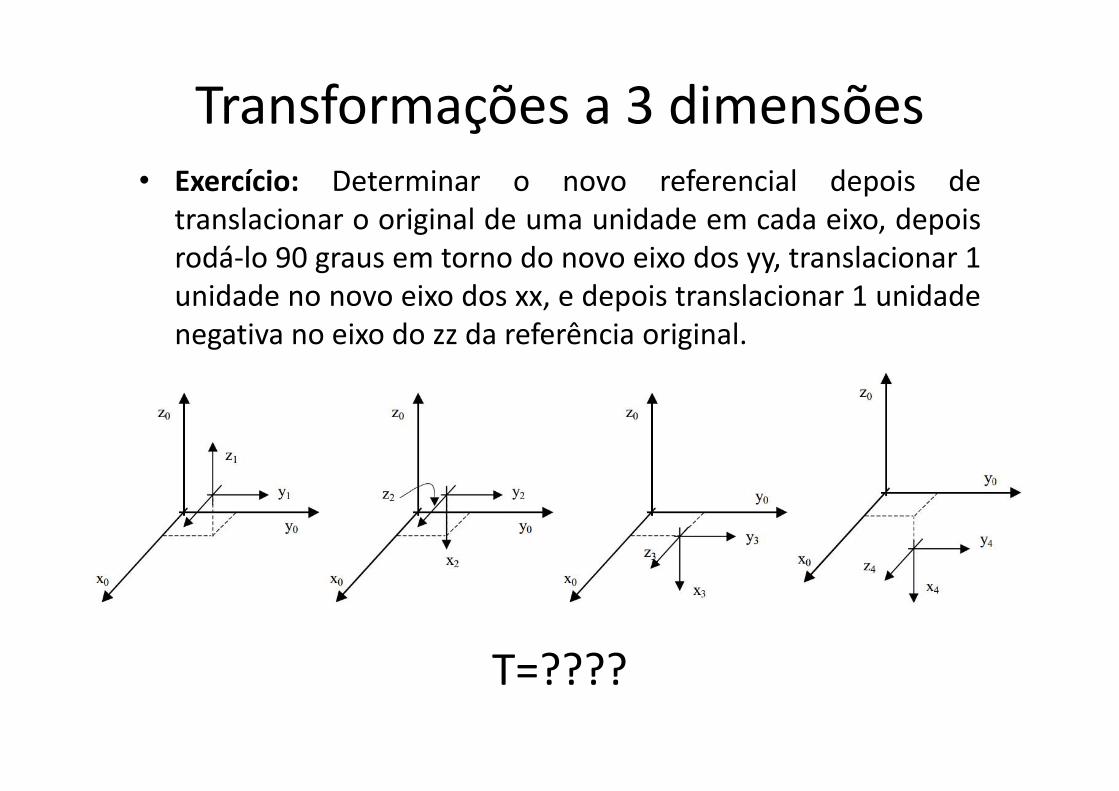
• Exercício: Determinar o novo referencial depois detranslacionar o original de uma unidade em cada eixo, depoisrodá‐lo 90 graus em torno do novo eixo dos yy, translacionar 1unidade no novo eixo dos xx, e depois translacionar 1 unidadenegativa no eixo do zz da referência original.
T=????
Transformações a 3 dimensões
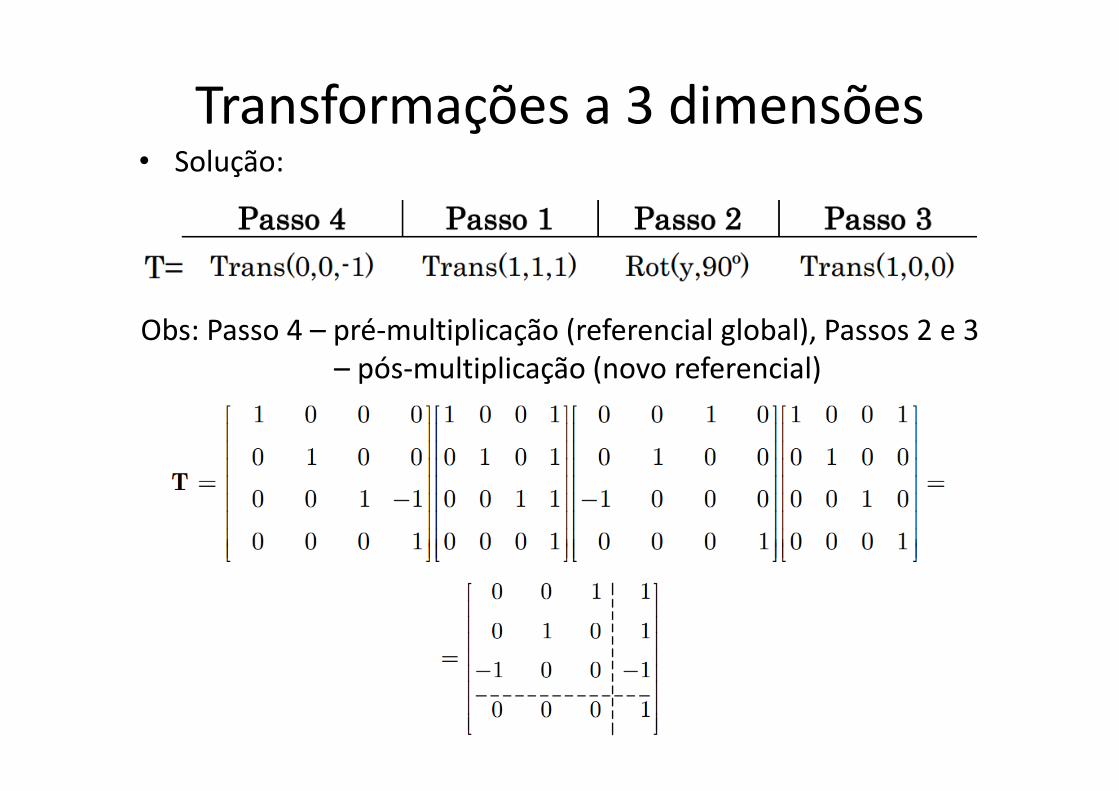
• Solução:
Obs: Passo 4 – pré‐multiplicação (referencial global), Passos 2 e 3 – pós‐multiplicação (novo referencial)
Transformações a 3 dimensões
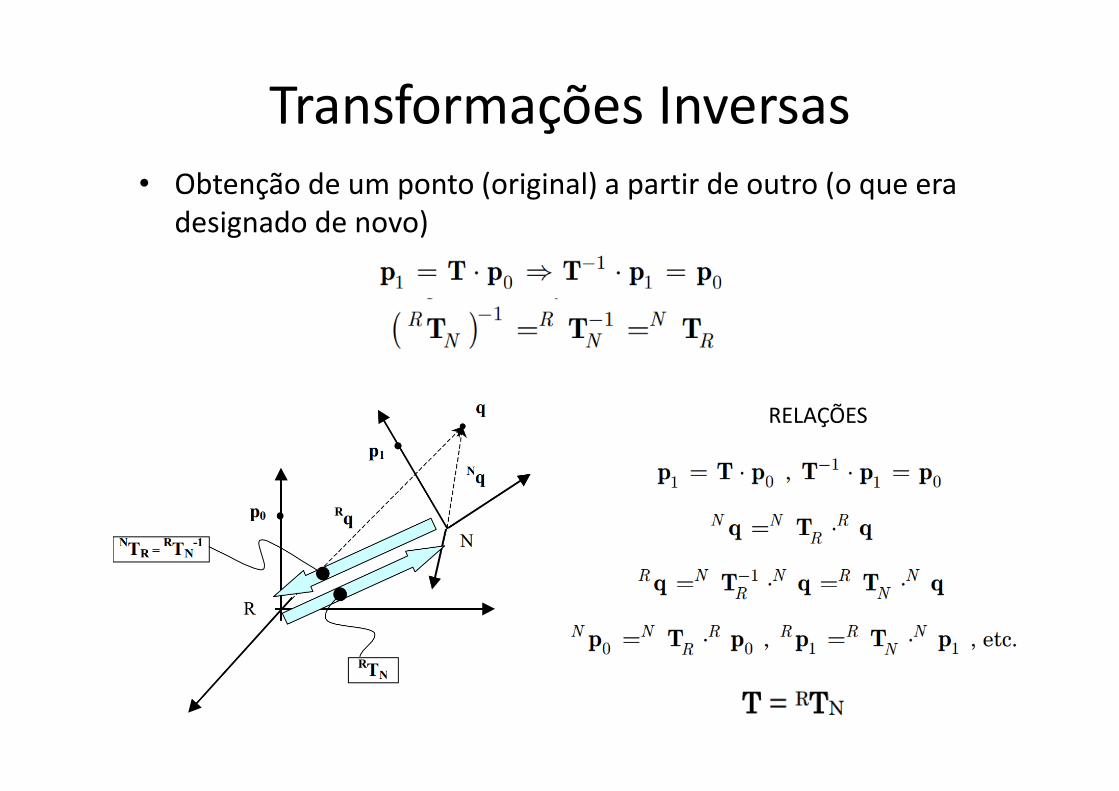
• Obtenção de um ponto (original) a partir de outro (o que era designado de novo)
Transformações Inversas
RELAÇÕES
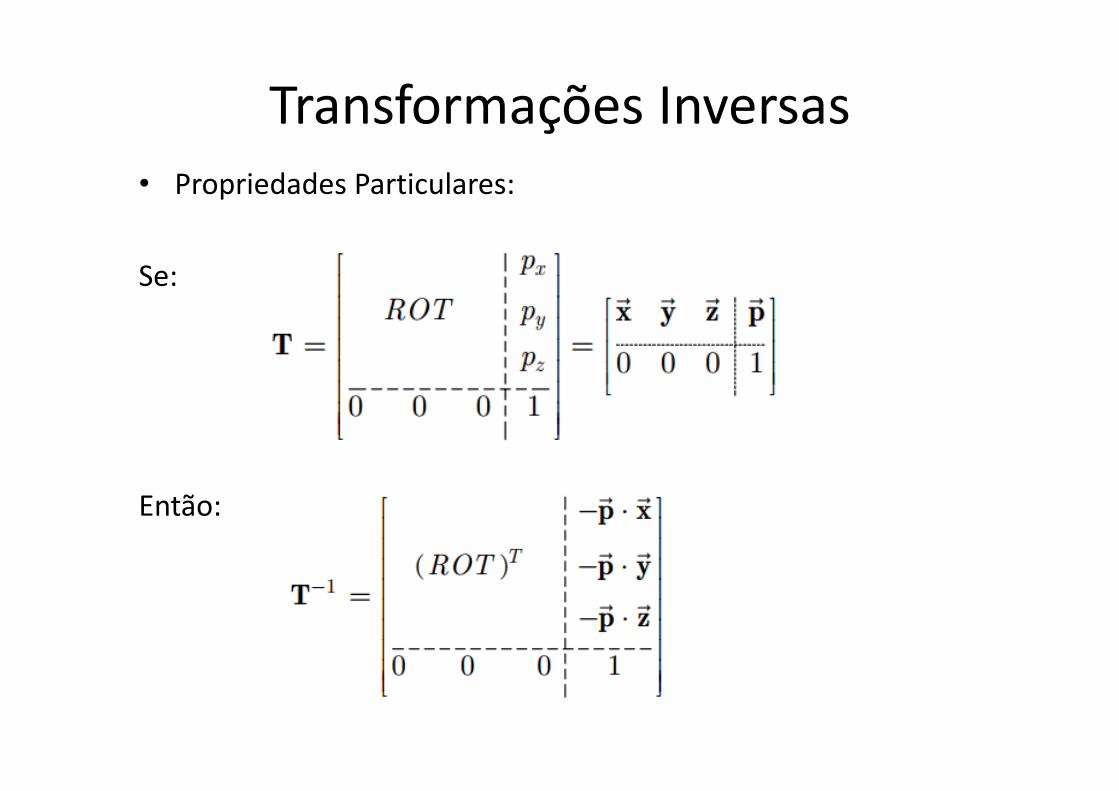
• Propriedades Particulares:
Se:
Então:
Transformações Inversas
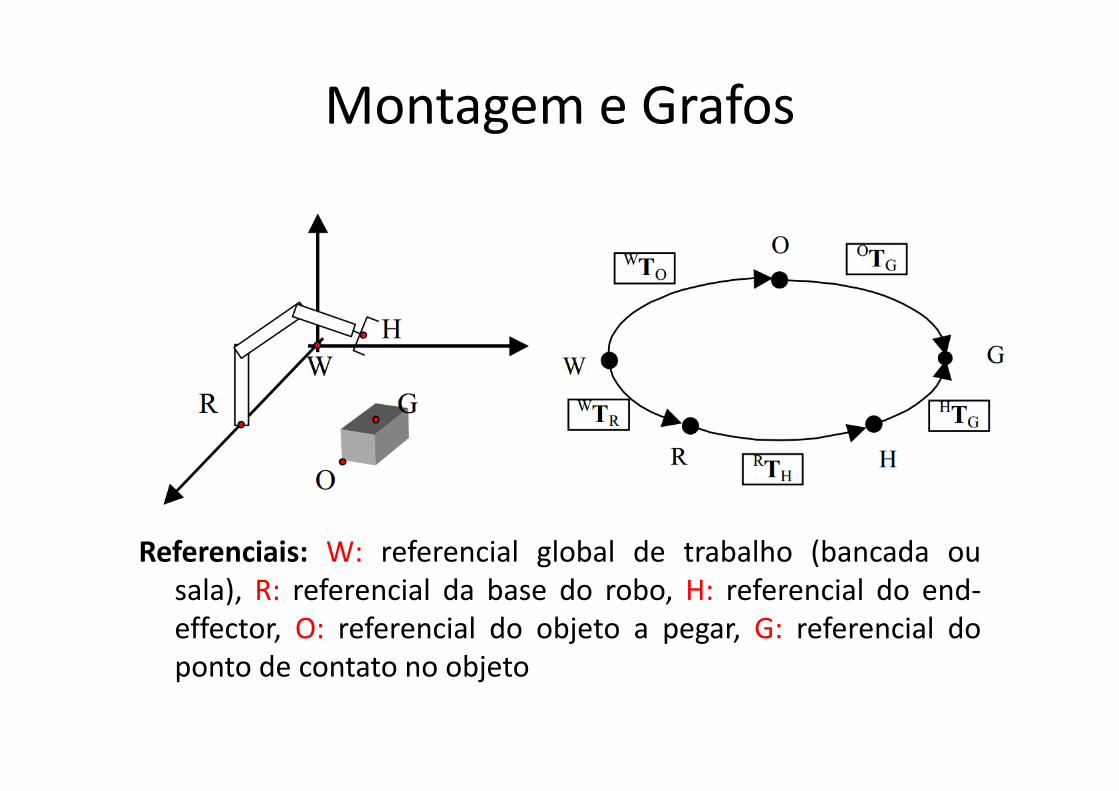
Referenciais: W: referencial global de trabalho (bancada ousala), R: referencial da base do robo, H: referencial do end‐effector, O: referencial do objeto a pegar, G: referencial doponto de contato no objeto
Montagem e Grafos
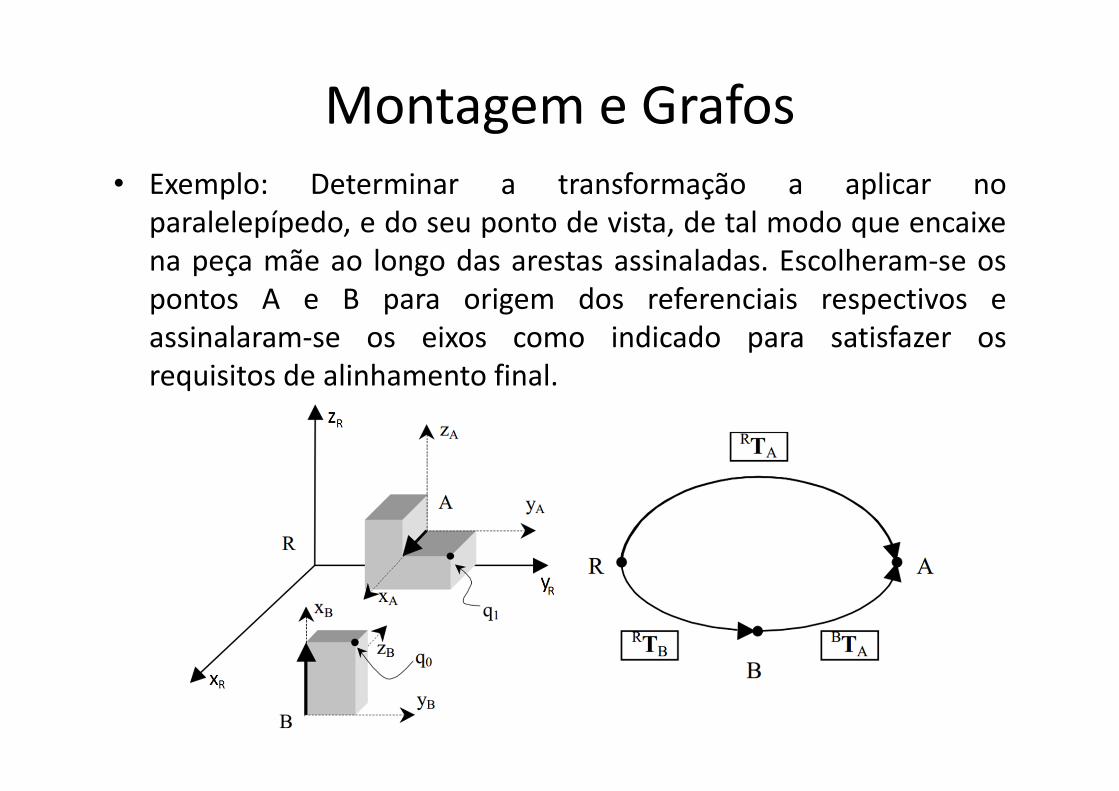
Montagem e Grafos• Exemplo: Determinar a transformação a aplicar no
paralelepípedo, e do seu ponto de vista, de tal modo que encaixena peça mãe ao longo das arestas assinaladas. Escolheram‐se ospontos A e B para origem dos referenciais respectivos eassinalaram‐se os eixos como indicado para satisfazer osrequisitos de alinhamento final.
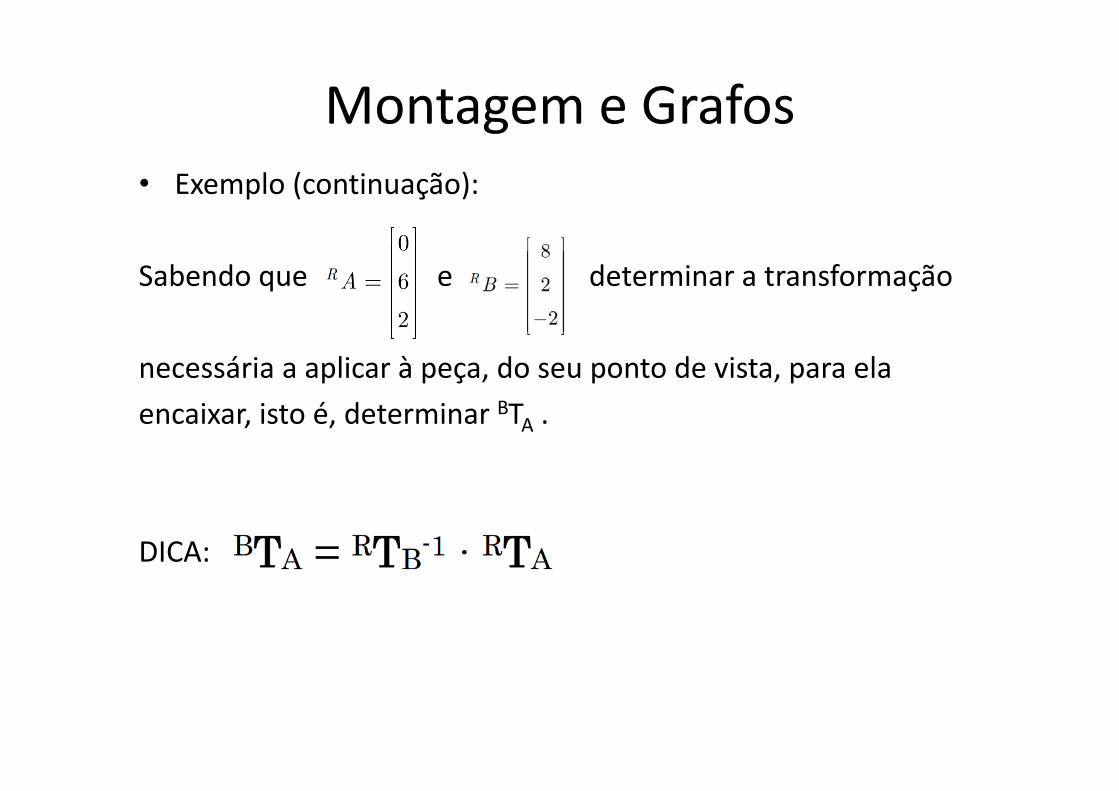
Montagem e Grafos• Exemplo (continuação):
Sabendo que e determinar a transformação
necessária a aplicar à peça, do seu ponto de vista, para elaencaixar, isto é, determinar BTA .
DICA:
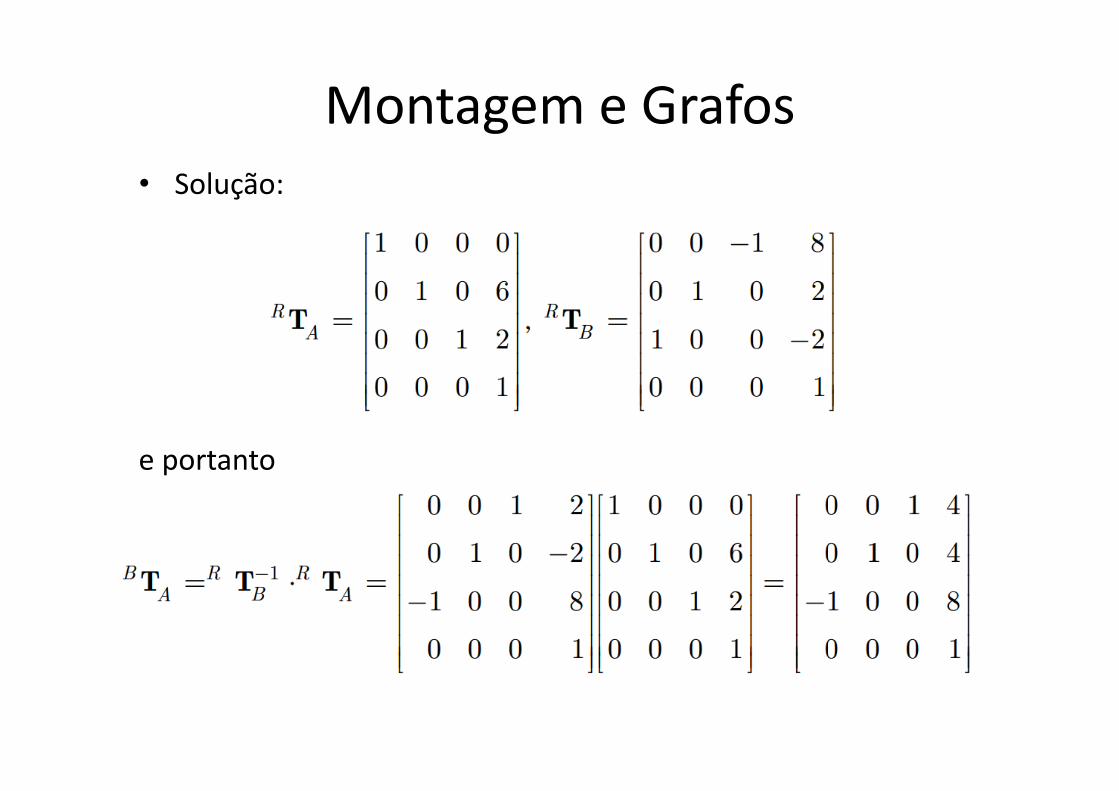
Montagem e Grafos• Solução:
e portanto
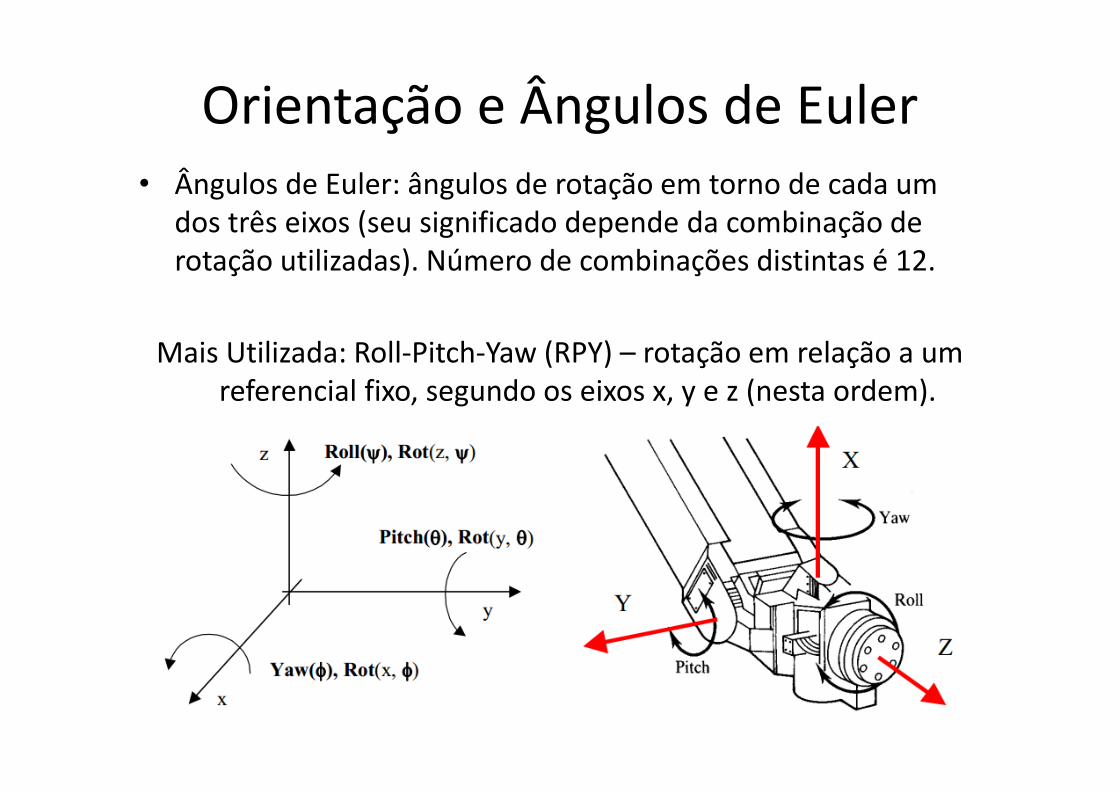
Orientação e Ângulos de Euler• Ângulos de Euler: ângulos de rotação em torno de cada um
dos três eixos (seu significado depende da combinação de rotação utilizadas). Número de combinações distintas é 12.
Mais Utilizada: Roll‐Pitch‐Yaw (RPY) – rotação em relação a um referencial fixo, segundo os eixos x, y e z (nesta ordem).
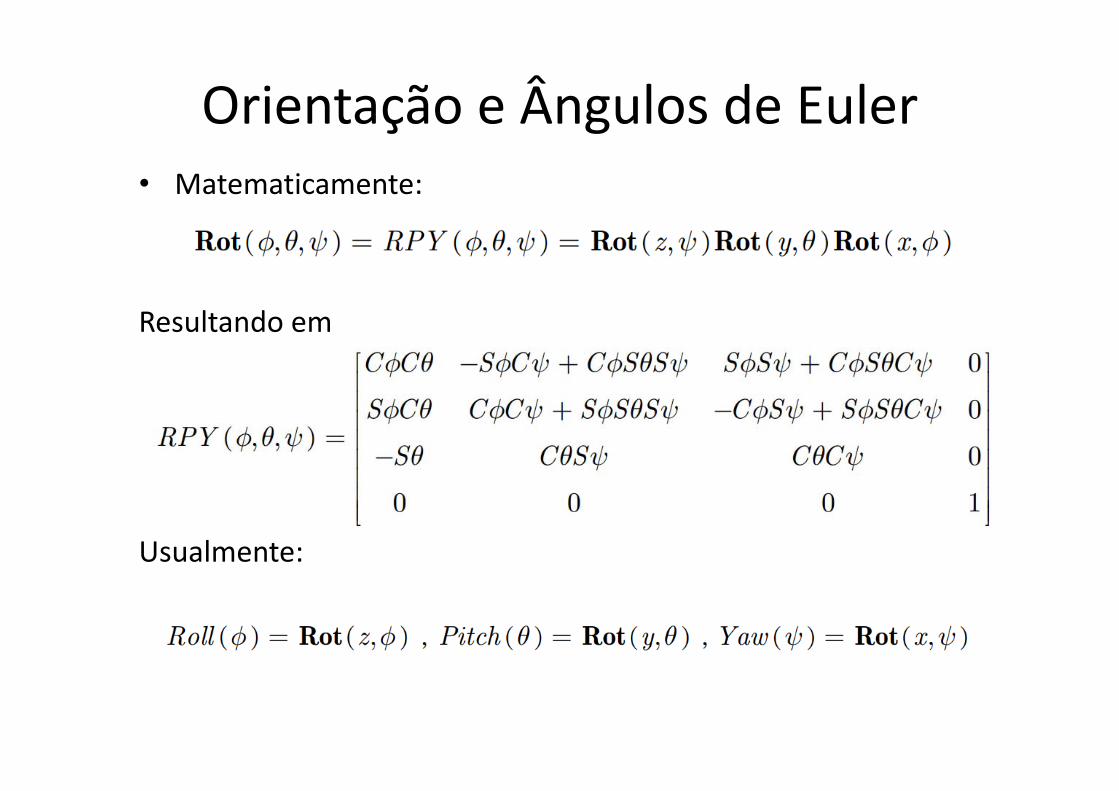
Orientação e Ângulos de Euler• Matematicamente:
Resultando em
Usualmente: