Relatorio Vibrações Pedro Trindade

of 24
-
Upload
pedro-trindade -
Category
Documents
-
view
216 -
download
1
Transcript of Relatorio Vibrações Pedro Trindade
-
8/18/2019 Relatorio Vibrações Pedro Trindade
1/24
CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICACELSO SUCKOW DA FONSECA – CEFET/RJ
TRABALHO DE VIBRAÇÕES MECÂNICASModelagem e análise dinâmica de veículos
Pedro Trindade
Rio de JaneiroDezembro de 2015
-
8/18/2019 Relatorio Vibrações Pedro Trindade
2/24
1. Introdução
1.1. Posicionamento
Grande parte das atividades humanas envolva vibração de alguma forma. Porexemplo, ouvimos porque nossos tímpanos vibram, e vemos porque as ondas de luzsofrem vibração. Os primeiros estudiosos da área de vibração concentraram seusesforços no entendimento dos fenômenos naturais e no desenvolvimento de teoriasmatemáticas para descrever a vibração de sistemas físicos. Atualmente, muitasinvestigações foram motivadas pelas aplicações da vibração na área de engenharia,como projeto de máquinas, fundações, estruturas, motores, turbinas e sistemas decontrole.
Até 40 anos atrás, estudos de vibrações, mesmo os que tratavam decomplexos sistemas de engenharia, eram realizados com a utilização de modelosgrosseiros, com apenas alguns graus de liberdade. Todavia, o advento de
computadores de alta velocidade possibilitou o tratamento de sistemas demoderada complexidade e a geração de soluções aproximadas em forma de soluçõesaproximadas.
O desenvolvimento do método de elementos finitos habilitou os engenheirosa usar computadores para realizar análises numericamente detalhadas de vibraçõesde sistemas mecânicos, veiculares e estruturais complexos que apresentammilhares de graus de liberdade.
O número mínimo de coordenadas independentes requeridas paradeterminar completamente as posições de todas as partes de um sistema a qualquerinstante define o grau de liberdade do sistema. No caso desse trabalho, será descrito
um modelo com 3 graus de liberdade.
1.2. Objetivo
Esse trabalho tem o objetivo de analisar o comportamento de um veículo planocom motorista e suspensões independentes passando por obstáculo, utilizando osoftware Matlab para a simulação numérica.
Existem outros softwares de simulação numérica especializados em veículoscomo o CarSim e o Adams.
Figura 1 - Simulação feita no Adams
-
8/18/2019 Relatorio Vibrações Pedro Trindade
3/24
Esse veículo plano corresponde a uma simplificação do modelo de metade de umveículo, vista lateral, e desconsiderando as massas não suspensas e alguns outrosfatores. Se tornando um sistema com 3 graus de liberdade.
Na análise será observado a resposta de algumas variáveis de importância doprojeto e o que acontece com o comportamento do veículo com a variação de alguns
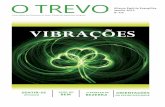
valores.Essas variáveis de importância são o deslocamento vertical do veículo, a rotação
do veículo em relação eixo y da imagem abaixo (Pitch) e o deslocamento vertical dopiloto do veículo.
Figura 2 - Sistema de coordenadas de um veículo da SAE
2. Equacionamento
2.1.
Modelo Físico
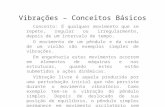
O modelo físico é descrito por um veículo plano com motorista e suspensõesindependentes passando por um obstáculo.
Esse modelo de ½ do veículo é composto por 3 graus de liberdade. Sendo eles odeslocamento vertical do veículo (), o deslocamento vertical do piloto () e odeslocamento angular do veículo ().
Figura 3- Modelo Plano com 3 graus de liberdade
-
8/18/2019 Relatorio Vibrações Pedro Trindade
4/24
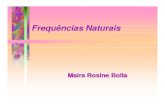
2.2. Diagrama de Corpo Livre
Foram definidas as variáveis do modelo, como mostrado na figura 4.Sendo,
,
e
3 as constantes elásticas das molas dianteira, traseira e do piloto,
respectivamente. E sendo, e as constantes de amortecimento dosamortecedores dianteiro e traseiro, respectivamente.
Figura 4 - Graus de liberdade do modelo
Após definidos as variáveis do modelo, foi feito o diagrama de corpo livre doscorpos presentes no modelo, demonstrado a figura 5.
Figura 5 - Diagrama de Corpo Livre do Modelo
Sendo, = − − ; = ̇ − ̇ − ̇;3 = − − ;4 = ̇ − ̇ − ̇;5 = 6 = 3 − − ;7 = ;8 =
;
-
8/18/2019 Relatorio Vibrações Pedro Trindade
5/24
2.3.
Modelo Matemático
Com o diagrama de corpo livre, consegue-se chegar as equações de movimentodo veículo e do piloto, a seguir.
̈ + ̇ + = 0 ̈ = − − − − − − + 3 − − − (̇ − ̇ − ̇) − (̇ − ̇ − ̇) − ̈ = − − − − − + 3 − − − (̇ − ̇ − ̇) + (̇ − ̇ − ̇)
̈ = −3 − − − O ponto de referência quanto ao movimento de pitch é o centro de gravidade da
barra. Sendo o angulo θ pequeno, foi considerado que sin = .Na forma matricial, temos:
= [ 0 00 00 0 ]
= + + 3 − + 3 −3 − + 3 + + 3 −3−3 −3 3
= [ + − 0 − + 00 0 0] No Brasil, as lombadas devem obedecer à resolução 39/98 do CONTRAN,
podendo ser de dois tipos de tamanho. No tipo 1 devem ter as medidas de 8 cm dealtura por 1,5m de largura, no tipo 2 devem ter 10 cm de altura por 3m de largura,ambos com o comprimento igual à largura da rua.
Figura 6 - Geometria da Lombada
-
8/18/2019 Relatorio Vibrações Pedro Trindade
6/24
Independente da altura e da largura da lombada, foi definido que a mesma terásua forma baseada na seguinte função:
= 2
1 − cos Onde, = e = Sendo, – Altura da Lombada – Frequência da passagem pela lombada – Tempo de passagem – Velocidade do veículo
– Comprimento da lombada
Foi definido também que o veículo está uma distância e da lombada. Issofacilitará a visualização da lombada sendo atingida no gráfico.
Devido a distância entre as duas rodas, elas encontraram a lombada em temposdiferentes. Essa diferença de tempo é definida pela distância entre as rodas sobre avelocidade do veículo. O mesmo é feito para achar o tempo até o impacto do veículoaté a lombada, só que substituindo a distância entre as rodas pela distância entre oveículo e a lombada.
Esses dois tempos foram adicionados na função da lombada para cada roda.
2.4.
Parâmetros Utilizados
Os parâmetros utilizados foram vários, para um melhor entendimento doimpacto de cada variável de importância no projeto. Foi decidido também trazer osparâmetros para dados mais palpáveis para o autor, por isso foi utilizadoparâmetros do projeto Baja SAE do CEFET/RJ.
Figura 7 - MudRunner Baja SAE - CEFET/RJ
-
8/18/2019 Relatorio Vibrações Pedro Trindade
7/24
O primeiro conjunto de parâmetros é o classificado como genérico. Nesseconjunto de parâmetros, as constantes elásticas e de amortecimento da suspensãoserão consideradas iguais. O piloto se encontra no CG, portanto será considerado
c=0. Valores da constante de amortecimento do piloto e do momento de inercia doveículo são fantasiosos. As dimensões da lombada serão as indicadas peloCONTRAN.
Tabela 1 - Parâmetros Genéricos
Variável Letra Valor Unidade
Distância do Veículo até a lombada e 40 m
Largura da Lombada d 1,5 m
Altura da Lombada yo 0,08 m
Distância do CG ao Amortecedor-Mola Dianteiro b 0,7374 m
Distância do CG ao Amortecedor-Mola Traseiro a 0,5196 m
Velocidade do veículo v 5 m/s
Distância do CG ao Passageiro c 0 m
Massa do Veículo m 200 kg
Massa do Piloto mp 70 kg
Constante Elástica Mola Dianteira k1 19380 N/m
Constante Elástica Mola Traseira k2 19380 N/m
Constante Elástica Piloto k3 8000 N/m
Constante de Amortecimento Diateira B1 3290 Ns/m
Constante de Amortecimento Traseiro B2 3290 Ns/mMomento de Inércia do Veículo J 24 Kg/m²
Gravidade g 9,81 N/s²
Agora, os parâmetros seguintes apenas as variáveis de interesse da análise serãomodificadas. Portanto, no conjunto de parâmetros seguintes, a variável de interessedo conjunto de parâmetros anterior volta a ser a genérica.
No segundo conjunto de parâmetros, será avaliado a influência da gravidade nomodelo.
Tabela 2 - Conjunto de parâmetros 2
Variável Letra Valor Unidade
Gravidade g 0 N/s²
No terceiro conjunto de parâmetros, será avaliado a mudança da geometria dalombada. Se aproximando de um obstáculo enfrentado pelo projeto baja nascompetições.
Tabela 3 - Conjunto de Parâmetros 3
Variável Letra Valor Unidade
Largura da Lombada d 1,5 m
Altura da Lombada yo 2 m
-
8/18/2019 Relatorio Vibrações Pedro Trindade
8/24
No quarto conjunto de parâmetros, será avaliado a mudança dos coeficienteselásticos, deixando eles diferentes entre si. De acordo com a literatura, coeficienteselásticos menores na dianteira e mais rígidos na traseira, proporcionam uma menorvariação tanto no eixo x, quanto no pitch.
Tabela 4 - Conjunto de Parâmetros 4
Variável Letra Valor Unidade
Constante Elástica Mola Dianteira k1 12000 N/m
Constante Elástica Mola Traseira k2 20000 N/m
No quinto conjunto de parâmetros, será avaliado a influência da constanteelástica do piloto. Essa constante pode ser relacionada a constante elástica do bancoem que o piloto está sentado, ou algum mecanismo para o controle dessa constante.O resultado esperado é que, aumentando a constante elástica do piloto, o sistemacomo um todo vibre menos e durante menos tempo. Em compensação, o piloto sofremaiores amplitudes, mas durante menos tempo também.
Tabela 5 - Conjunto de Parâmetros 5
Variável Letra Valor Unidade
Constante Elástica Piloto k3 15000 N/m
No sexto conjunto de parâmetros, será avaliado a influência da mudança doscoeficientes de amortecimentos. Para saber a real influencia será testado 2configurações diferentes, já que uma das configurações já está no conjunto de
parâmetros genéricos. Uma com o dianteiro maior que o traseiro e uma com otraseiro maior que o dianteiro. Só uma dessas duas configurações será mostradaabaixo na tabela e nos resultados. A escolha se dará pela configuração que der omelhor resultado.
Tabela 6 - Conjunto de Parâmetros 6
Variável Letra Valor Unidade
Constante de Amortecimento Dianteira B1 3290 Ns/m
Constante de Amortecimento Traseiro B2 6290 Ns/m
-
8/18/2019 Relatorio Vibrações Pedro Trindade
9/24
3.
Resultado da Simulação
A seguir serão mostrados os resultados das simulações. Eles só serão analisadosno próximo tópico. Como o objetivo é diminuir ao máximo a amplitude e a duraçãodas oscilações, a metodologia da demonstração dos resultados será através de 4gráficos. Um com o deslocamento do veículo, um com o deslocamento do piloto, umcom os três gráficos anteriores juntos.
Parâmetros Genéricos
-
8/18/2019 Relatorio Vibrações Pedro Trindade
10/24
-
8/18/2019 Relatorio Vibrações Pedro Trindade
11/24
Conjunto de Parâmetros 2
-
8/18/2019 Relatorio Vibrações Pedro Trindade
12/24
-
8/18/2019 Relatorio Vibrações Pedro Trindade
13/24
Conjunto de Parâmetros 3
-
8/18/2019 Relatorio Vibrações Pedro Trindade
14/24
-
8/18/2019 Relatorio Vibrações Pedro Trindade
15/24
Conjunto de Parâmetros 4
-
8/18/2019 Relatorio Vibrações Pedro Trindade
16/24
-
8/18/2019 Relatorio Vibrações Pedro Trindade
17/24
Conjunto de Parâmetros 5
-
8/18/2019 Relatorio Vibrações Pedro Trindade
18/24
-
8/18/2019 Relatorio Vibrações Pedro Trindade
19/24
Conjunto de Parâmetros 6
-
8/18/2019 Relatorio Vibrações Pedro Trindade
20/24
-
8/18/2019 Relatorio Vibrações Pedro Trindade
21/24
3.1.
Análises dos resultados no domínio do tempo
A seguir serão analisados cada caso em comparação com o genérico. Masinicialmente será feita a análise dos resultados da simulação com o conjunto deparâmetros genéricos.
Parâmetro Genérico
Primeiramente nota-se a ação da gravidade e o veículo se estabilizando antes deencontrar a lombada, nos oito (8) primeiros segundos. Pode-se ver que o piloto é oque mais oscila.
Graus de Liberdade Genérico
Deslocamento Positivo Máximo Piloto 0,10 m
Deslocamento Positivo Máximo Veículo 0,08 m
Angulação do Veículo 2,86°
Parâmetro Genérico x Parâmetro 2
Sem a força da gravidade, o comportamento do sistema não muda muito. Masos valores encontrados mostram uma modificação no deslocamento do piloto e naangulação do veículo.
Graus de Liberdade Genérico P 2
Deslocamento Positivo Máximo Piloto 0,10m 0,11 m
Deslocamento Máximo Veículo 0,08m 0,08m
Angulação do Veículo 2,86° 1,7°
Parâmetro Genérico x Parâmetro 3
Mudando a geometria da lombada pra um exemplo de obstáculo exagerado.Provavelmente esses dados são irreais, pois essas condições o pneu perderiacontato com o solo, o que não é previsto pelo modelo.
Graus de Liberdade Genérico P 3Deslocamento Positivo Máximo Piloto 0,10m 2,2 m
Deslocamento Máximo Veículo 0,08m 1,5 m
Angulação do Veículo 2,86° 45,8°
-
8/18/2019 Relatorio Vibrações Pedro Trindade
22/24
Parâmetro Genérico x Parâmetro 4
Nesse caso, o resultado ficou como o esperado. Houve uma diminuiçãonotável no deslocamento do piloto e no ângulo de pitch.
Graus de Liberdade Genérico P 4
Deslocamento Positivo Máximo Piloto 0,10m 0,04 m
Deslocamento Máximo Veículo 0,08m 0,08 m
Angulação do Veículo 2,86° 0,86°
Parâmetro Genérico x Parâmetro 5
Nesse caso, o resultado ficou como o esperado. Houve um aumento nodeslocamento do piloto. Mas o fator mais interessante nesse caso é a diminuição do
tempo da oscilação. Passou de 8 segundos de oscilação para aproximadamente 4segundos. Essa ferramenta é utilizada para diminuir a oscilação em equipamentosadicionando uma massa acoplada a uma mola com uma alta constante elástica.
Graus de Liberdade Genérico P 5
Deslocamento Positivo Máximo Piloto 0,10m 0,12 m
Deslocamento Máximo Veículo 0,08m 0,075 m
Angulação do Veículo 2,86° 1,72°
Parâmetro Genérico x Parâmetro 6
Nesse caso, houve uma diminuição no deslocamento do piloto e do veículo.Mas o tempo da oscilação aumentou bastante. Não dá para visualizar quando osistema se equilibra, tanto o piloto quanto o veículo.
Graus de Liberdade Genérico P 6
Deslocamento Positivo Máximo Piloto 0,10m 0,09 m
Deslocamento Máximo Veículo 0,08m 0,06 m
Angulação do Veículo 2,86° 1,72°
3.2. Frequências e modos naturais de vibração
As frequências naturais só modificam se alguma constante elástica formodificada, como nos casos 4 e 5.
Frequência Natural Genérico P1 P2 P3 P4 P5 P6
w1 5,63 5,63 5,63 5,63 5,52 6,91 5,63
w2 8,75 8,75 8,75 8,75 7,7 8,87 8,75
w3 15,63 15,63 15,63 15,63 14,49 17,21 15,63
-
8/18/2019 Relatorio Vibrações Pedro Trindade
23/24
4. Comentários Finais
Esse estudo serviu ao propósito de investigar a influência de cada variável deimportância do projeto. Mas essa análise foi feita separadamente. A sugestão depróximos trabalhos seria a análise com todos os fatores modificados juntos. Eutilizando o próprio Matlab para otimizar a solução. Outra simulação interessanteseria a utilização de mais de uma lombada na mesma simulação.
Outro fator é a programação no Matlab. O programa desenvolvido apresentoualguns erros. Como por exemplo, a modificação da variável velocidade do veículopara uma velocidade um pouco acima de 8 m/s casou perda dos resultados,deixando todos os gráficos com os dados fixos em 0.
É necessário então o aprimoramento na linguagem de programação do Matlabpara produzir uma solução confiável.
5.
Anexos
Programa utilizado
clear close all global a b bb d da db e g kb m mp yo vc ngl=3; m=200;
m2=24;
mp=70;
k1=19380;
k2=19380;k3=8000;
B1=3290;
B2=3290;
da=0.5196;
db=0.7374;
dc=0;
e=40;
vc=5;
yo=0.08;
d=1.5;
M=[m,0,0;0,m2,0;0,0,mp];
g=9.81;
k=[k2+k1+k3,k1*db-k2*da+k3*dc,-k3;k1*db-k2*da+k3*dc,k2*da*da+k1*db*db+k3*dc*dc,-k3*dc;-k3,-k3*dc,k3];
B=[B1+B2,B1*db-B2*da,0;B1*db-B2*da,B2*da*da+B2*db*db,0;0,0,0];
kb=[k2,k1;-k2*da,k1*db;0,0];
bb=[B2,B1;-B2*da,B1*db;0,0];
a=[zeros(ngl,ngl) eye(ngl,ngl);-inv(M)*k B*-inv(M)]; b=[zeros(ngl,ngl);inv(M)]; tspan=[0,20];
y0=[0;0;0;0;0;0];
[t,y]=ode45('equacao',tspan,y0); n=length(t); x1=y(1:n,1); teta=y(1:n,2);
x3=y(1:n,3); w1=m^(-0.5); kt=w1*k*w1;
-
8/18/2019 Relatorio Vibrações Pedro Trindade
24/24
[p,q]=eig(kt); omega=sqrt(q); for l=1:ngl fprintf('Frequencia Natural w%g=%g.\n',l,omega(l,l)) end figure(1)
plot(t,x1) grid xlabel('Tempo (s)') ylabel('Deslocamento veículo (m)') figure(2) plot(t,x3) grid xlabel('Tempo (s)') ylabel('Deslocamento piloto (m)') figure(3) plot(t,teta) grid xlabel('Tempo (s)') ylabel('Pitch (rad)') figure(4) plot(t,teta,t,x3,t,x1) grid xlabel('Tempo (s)') ylabel('(m/m/rad)')
Função Lombada
function yp=equacao(t,y)
global a b bb d da db e g kb m mp yo vc t1 = e/vc; t2 = t1 + d/vc;
if t