RELATÓRIO 2- Método de Identificação Dos Mínimos Quadrados
9
LABORATÓRIO DE CONTROLE DIGITAL: Prática 03: Método de identificação dos Mínimos Quadrados Componentes: Juremir da Silva Ramos, Raniere Lira de Sousa Martins, Robson Moreira de Freitas, Allan Silva, Lucas Sousa. Resumo. . Palavras-chave: 1. INTRODUÇÃO Os algoritmos recursivos (MQR) utilizam pouca memória e pequeno esforço computacional. A cada período de amostragem, novas medidas dos sinais de entrada e saída tornam-se disponíveis e são processadas de forma on-line, em tempo real, fornecendo-se assim estimativas dos parâmetros de cada período de amostragem. Isso é útil quando os parâmetros do processo variam lentamente em função de não linearidades, desgastes, aquecimentos, falhas, dentre outros. Tais algoritmos são também úteis na resolução de problemas numéricos cujo processamento de todos os dados de uma só vez seria difícil. A denominação on-line refere- se ao fato de o processamento ocorrer suficientemente rápido de maneira que o resultado esteja disponível para influenciar o processo sendo monitorado ou controlado. Em cada período de amostragem novas medidas tornam-se disponíveis e são utilizadas com o modelo atual para gerar um novo erro de modelagem (new fitting error), ε ( t) (mede a qualidade do modelo estimado). Por exemplo, no instante de tempo (t + 1), novas medidas u(t+1), y(t+1) ocorrem. Em vez de recalcular o estimador dos mínimos quadrados é interessante atualizar as estimativas anteriormente calculadas no instante t, θ ( t), para obter as novas estimativas θest( t +1). Para o desenvolvimento das equações do estimador dos MQR
-
Upload
ranieresystem -
Category
Documents
-
view
33 -
download
8
description
Método de identificação dos mínimos quadrados.
Transcript of RELATÓRIO 2- Método de Identificação Dos Mínimos Quadrados
LABORATRIO DE CONTROLE DIGITAL: Prtica 03: Mtodo de identificao dos Mnimos Quadrados
Componentes: Juremir da Silva Ramos, Raniere Lira de Sousa Martins, Robson Moreira de Freitas, Allan Silva, Lucas Sousa.
Resumo..
Palavras-chave:
1. INTRODUO
Os algoritmos recursivos (MQR) utilizam pouca memria e pequeno esforo computacional. A cada perodo de amostragem, novas medidas dos sinais de entrada e sada tornam-se disponveis e so processadas de forma on-line, em tempo real, fornecendo-se assim estimativas dos parmetros de cada perodo de amostragem. Isso til quando os parmetros do processo variam lentamente em funo de no linearidades, desgastes, aquecimentos, falhas, dentre outros. Tais algoritmos so tambm teis na resoluo de problemas numricos cujo processamento de todos os dados de uma s vez seria difcil.A denominao on-line refere-se ao fato de o processamento ocorrer suficientemente rpido de maneira que o resultado esteja disponvel para influenciar o processo sendo monitorado ou controlado.
Em cada perodo de amostragem novas medidas tornam-se disponveis e so utilizadas com o modelo atual para gerar um novo erro de modelagem (new fitting error), (mede a qualidade do modelo estimado). Por exemplo, no instante de tempo (t + 1), novas medidas u(t+1), y(t+1) ocorrem. Em vez de recalcular o estimador dos mnimos quadrados interessante atualizar as estimativas anteriormente calculadas no instante t, , para obter as novas estimativas .Para o desenvolvimento das equaes do estimador dos MQR deve-se comparar a estimativa baseada nas medidas em instantes que variam de 1 (um)at t com a estimativa baseada nas medidas nos instantes de 1 (um)at (t+1).Conforme mostrado na seo anterior, o estimador dos mnimos quadrados calculado por(16)onde(17)
Supor que no instante (t+1) obtm-se nova medida do sistema, ento os vetores de medida e sada so reescritos como(18)(15)
(19)(16)
As estimativas no instante de tempo t so(17)
(20)enquanto que no instante (t+1) so dadas por(18)
(21)onde(22)
Uma vez conhecido (t+1) pode-se atualizar a matriz anterior das correlaes T (t)(t) para obter as matriz atual T(t+1)(t+1). Entretanto, necessrio encontrar uma maneira de atualizar a inversa de T(t)(t) sem calcular a matriz inversa em cada instante de tempo.
1.1 METODOLOGIA
Nesta seo sero apresentados sistemas simulados que foram programados com as tcnicas de controle vistas neste relatrio, seguida de uma discusso sobre a resposta desses sistemas para cada tipo de controle.
1.2 INSTRUES PARA A SIMULAO
O trabalho foi escrito no editor de programas do software MATLAB e simulado os sistemas no Simulink com auxlio da placa de desenvolvimento MCLAB2.
2. EXEMPLO DE SIMULAO
sysd = 0.335 z + 0.2531 -------------------------- z^3 - 1.314 z^2 + 0.4317 z
Nesta seo foi feita a estimao dos parmetros da - funo de transferncia discreta (FT), para a entrada degrau e para uma entrada aleatria, usando o estimador dos mnimos quadrados recursivo (MQR). Este mtodo semelhante ao anterior, a diferena que no h armazenamento de um grande numero de amostras, e a estimao feita recursivamente. O quadro 4 apresenta o programa que estima a FT recursivamente de acordo com o exposto na seo 2.Aqui colocou-se um rudo e(k) na sada y(k) do processo para tornar a simulao mais prxima de um sistema real. Se estima o sistema usando um modelo discreto de segunda ordem. A ordem do modelo deve ser definido primeiramente para os mtodos dos mnimos quadrados recursivo e no recursivo. Se a ordem do sistema no for adequada para o modelo aproximado, deve-se tentar utilizar um modelo de maior ordem.
Quadro : programao em MATLAB para os mnimos quadrados recursivo
clear all; clc; nit=80; % NUMERO DE INTERAES% GERA SINAIS DE ENTRADA E RUIDOfor k=1:nit u(k) = 10*rand(); %entrada randomica e(k) = u(k)*0.01;end% -- Condies iniciais: matriz de covarinciap = 1000*eye(4,4);% -- Condies iniciais: parmetros e sadateta = [0;0;0;0];for k = 1:4 y(k) = 0; erro(k) = 0; a1(k) = teta(1); a2(k) = teta(2); b0(k) = teta(3); b1(k) = teta(4);end% INTERAES DA ESTIMAOfor k = 4:nit % ----- Calcular a sada atual y(k)= 1.314*y(k-1) - 0.4317*y(k-2) + 0.335*u(k-1) + 0.2531*u(k-2) + e(k);% Atualizar Fi(t) com novas medidas no tempo 't' fi = [-y(k-1);-y(k-2);u(k-1);u(k-2)]; % Calcular o erro de estimao erro(k) = y(k)-teta'*fi; % Calcular o vetor de ganho K = p*fi/(1+fi'*p*fi); % Calcular o novo vetor de estimao de parmetros teta = teta+K*erro(k); % Atualizar a matriz de covarincia p = (p-K*fi'*p); % Armazenar parmetros a1(k) = teta(1); a2(k) = teta(2); b0(k) = teta(3); b1(k) = teta(4);end%RESULTADOSparametros = teta't = 1:nit;subplot(221),plot(t,a1(t)),title('a1'),xlabel('amostragem');subplot(222),plot(t,a2(t)),title('a2'),xlabel('amostragem');subplot(223),plot(t,b0(t)),title('b0'),xlabel('amostragem');subplot(224),plot(t,b1(t)),title('b1'),xlabel('amostragem');figure(2)plot(t,u(t)),title('u'),xlabel('entrada');
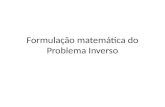
Figura 4: Entrada u sinal aleatrio
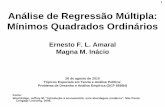
Figura 5: Estimao do modelo recursivamente.
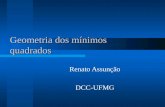
Como pode ser observado na figura acima, os parmetros estimados variam com o tempo. Inicialmente eles foram configurados nulos e mudam bastante no inicio da estimao. Nese caso, em que o rudo de apenas 1% da entrada, os parmetros estabilizaram em menos de 10 segundos, no entanto pode ser verificado que para um rudo maior a estimao ser mais lenta e o valor dos parmetros ficar mudando continuamente com maior intensidade. Em um sistema real no h apenas rudos, mas tambm pode haver mudanas na dinmica do processo com o tempo, e a estimao recursiva pode acompanhar essas mudanas. A figura abaixo mostra a estimao dos parmetros para um rudo de 10% da entrada.
Figura 6: Estimao do modelo recursivamente.
2.2 IMPLEMENTAO PRTICA PROCESSO DE VELOCIDADE DO MOTOR CC
Nesta seo foi implementado o cdigo para o processo de velocidade do ventilador da placa Mclab2 disponvel em laboratrio.Depois de se implementar o estimador dos mnimos quadrados no recursivo para o ventilador ser verificado a validade do modelo estimado comparando a resposta real do sistema com a resposta do modelo aproximado na forma grfica.Deve-se primeiro escolher um perodo de amostragem adequado para o sistema. Ser escolhido um tempo de amostragem 4 vezes inferior ao tempo de subida da resposta do sistema ao degrau. A figura abaixo mostra a resposta do sistema em malha aberta do sistema para a entrada degrau unitrio. Observe que o tempo de subida est em torno de 2 segundos e, portanto, ser escolhido um tempo de amostragem de . Esse o maior tempo de amostragem recomendado (COELHO, 2004), que de 4 vezes menor que o tempo de subida.
Quadro 7: Resposta ao degrau em malha aberta em MATLAB
clc; clear allnpts = 15;%numer de interaesfor k=1:npts y(k)= velocidade_ventilador();%obtem velocidade do ventilador set_pwm_duty(1,1);%aplica degrau unitrio pause(1)%espera 1 segundoend%==================PLOTA SAIDA===================================plot(y)
Figura 7: Resposta ao degrau em malha abertaEscolhido o tempo de amostragem do sistema ser rodado os mnimos quadrados para se obter o modelo desejado. O quadro 8 apresenta o programa para que realiza esta funo. A sada do programa mostrada logo em seguida ao cdigo.
Quadro 8: Estimador dos Mnimos Quadrados no Recursivo aplicado no Ventilador
%Sequncia Binria Psuedo-Aleatriaclearclose alltf=49;delta=1;nit=100;t=[0:delta:nit];npts=length(t);u=rand(size(t)); %entrada aleatriaalfa=0.5; for i=1:length(t), if u(i)