Proposta de um Sistema Aberto de Controle em Hardware e ... · path and safe delivery with...
7
Proposta de um Sistema Aberto de Controle em Hardware e Software para VANT Direcionado à Entrega Confiável de Cargas Luiz Carlos Querino Filho 1 , Kalinka R. L. J. C. Branco 2 1 FATEC - Faculdade de Tecnologia de Garça Av. Presidente Vargas, 2331 – Garça – SP - Brasil 2 USP - ICMC - Instituto de Ciências Matemáticas e de Computação Av. Trabalhador Sãocarlense, 400 - São Carlos - SP - Brasil [email protected], [email protected] Abstract. As a consequence of the evolutionary process of the miniaturization of electronic components, sensors and wireless communication devices, UAVs (Unmanned Aerial Vehicles) have become more accessible and present in several types of applications. One of the recent possibilities of use for these kind of devices is the delivery of parcels and cargo, and such use have began to be tested by retail and transportation companies. This paper presents a proposal of a UAV model using open hardware and softwares components, allowing the transport and delivery of parcels in a quadcopter with route planning, payload coupling, obstacle avoidance, package tracking during the path and safe delivery with confirmation of identity of the receptor. Resumo. Como consequência do processo evolucionário da miniaturização de componentes eletrônicos, sensores e dispositivos de comunicação sem fio, os VANTs (Veículos Aéreos Não Tripulados) se tornaram mais acessíveis e presentes em diversos tipos de aplicações. Uma das mais recentes possibilidades de uso para esses equipamentos é na entrega de pacotes e encomendas, e tal utilização já começa a ser testada por empresas de varejo e transportes. Este artigo apresenta uma proposta de um modelo de VANT com uso de componentes de hardware e software abertos, proporcionando o transporte e entrega de pacotes em um quadricóptero com planejamento de rota, acoplamento de carga, desvio de obstáculos, rastreamento do pacote durante o trajeto e entrega segura com confirmação da identidade do receptor. 1. Introdução Os VANTs (Veículos Aéreos Não Tripulados) são aeronaves que não necessitam de um piloto a bordo para seu controle e que são construídas geralmente em escala menor que as tradicionalmente tripuladas [Braga et al. 2011]. Podem ser elaborados como aviões, dirigíveis e helicópteros, sendo que para este último há as variações com mais de dois rotores, os chamados multirotores [Balas 2007]. Com a miniaturização dos componentes eletrônicos que equipam esses veículos, e seu consequente barateamento, sua utilização nos mais diversos campos de atividade aumentou significativamente. Vigilância, análise ambiental e missões militares são Anais do II Workshop de Comunicação em Sistemas Embarcados Críticos - WoCCES 2014 17
Transcript of Proposta de um Sistema Aberto de Controle em Hardware e ... · path and safe delivery with...
-
Proposta de um Sistema Aberto de Controle em Hardware e Software para VANT Direcionado Entrega Confivel de
Cargas Luiz Carlos Querino Filho1, Kalinka R. L. J. C. Branco2
1FATEC - Faculdade de Tecnologia de Gara Av. Presidente Vargas, 2331 Gara SP - Brasil
2USP - ICMC - Instituto de Cincias Matemticas e de Computao Av. Trabalhador Socarlense, 400 - S o Carlos - SP - Brasil [email protected], [email protected]
Abstract. As a consequence of the evolutionary process of the miniaturization of electronic components, sensors and wireless communication devices, UAVs (Unmanned Aerial Vehicles) have become more accessible and present in several types of applications. One of the recent possibilities of use for these kind of devices is the delivery of parcels and cargo, and such use have began to be tested by retail and transportation companies. This paper presents a proposal of a UAV model using open hardware and softwares components, allowing the transport and delivery of parcels in a quadcopter with route planning, payload coupling, obstacle avoidance, package tracking during the path and safe delivery with confirmation of identity of the receptor. Resumo. Como consequncia do processo evolucionrio da miniaturizao de componentes eletrnicos, sensores e dispositivos de comunicao sem fio, os VANTs (Veculos Areos No Tripulados) se tornaram mais acessveis e presentes em diversos tipos de aplicaes. Uma das mais recentes possibilidades de uso para esses equipamentos na entrega de pacotes e encomendas, e tal utilizao j comea a ser testada por empresas de varejo e transportes. Este artigo apresenta uma proposta de um modelo de VANT com uso de componentes de hardware e software abertos, proporcionando o transporte e entrega de pacotes em um quadricptero com planejamento de rota, acoplamento de carga, desvio de obstculos, rastreamento do pacote durante o trajeto e entrega segura com confirmao da identidade do receptor.
1. Introduo Os VANTs (Veculos Areos No Tripulados) so aeronaves que no necessitam de um piloto a bordo para seu controle e que so construdas geralmente em escala menor que as tradicionalmente tripuladas [Braga et al. 2011]. Podem ser elaborados como avies, dirigveis e helicpteros, sendo que para este ltimo h as variaes com mais de dois rotores, os chamados multirotores [Balas 2007]. Com a miniaturizao dos componentes eletrnicos que equipam esses veculos, e seu consequente barateamento, sua utilizao nos mais diversos campos de atividade aumentou significativamente. Vigilncia, anlise ambiental e misses militares so
Anais do II Workshop de Comunicao em Sistemas Embarcados Crticos - WoCCES 2014
17
-
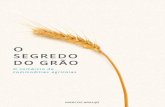
alguns dos campos nos quais os VANTs so empregados atualmente [Branco et al. 2011]. Uma nova possiblidade de utilizao para os VANTs passou a ganhar ateno recentemente: o transporte e entrega de pacotes e encomendas. Como exemplo, a Amazon, um dos principais nomes do varejo mundial, anunciou ao mundo o desenvolvimento do servio Amazon Prime Air, que utilizar multirotores para entrega de encomendas aos seus clientes [Amazon 2014]. De modo semelhante, a DHL, empresa de transportes, tambm j anunciou pesquisas nessa rea, utilizando VANTs para entrega de medicamentos [DailyMail 2014].
Figura 1. VANT do servio Amazon Prime Air [Amazon 2014]
A perspectiva do uso de VANTs nesse ramo de atividade levanta uma srie de questes sobre o modelo de funcionamento de um sistema desse tipo - esse o tema abordado na seo 2 deste artigo. Posteriormente, na seo 3, apresentado o modelo conceitual do sistema, composto de um VANT e outros recursos de suporte necessrios atividade de entrega, como uma estao de controle e planejamento da misso, um servidor Web para intermediar a comunicao entre o veculo, remetente e destinatrio do pacote, e aplicativos mveis voltados ao acompanhamento e recepo da carga. A seo 4 contm as consideraes finais sobre a proposta e a possibilidade de implementaes futuras. Por fim, a seo 5 traz as referncias bibliogrficas consultadas para elaborao deste artigo.
2. Objetivos, consideraes gerais e funcionamento do sistema A possibilidade do uso de um Veculo Areo No Tripulado na entrega de encomendas tradicionais (como aquelas realizadas em lojas de varejo) traria consequncias bvias na rapidez e economia do processo de transporte. Fora do ramo tradicional de vendas, VANTs tambm podem ser utilizados para transporte rpido de documentos e pequenos objetos dentro de grandes cidades, no sendo afetados diretamente por problemas tpicos de servios de entrega tradicionais (como aqueles realizados por motoboys e transportadoras), como trnsito intenso e furto. Quando se estende a rea de atuao desses veculos, pode-se considerar tambm seu uso na entrega de medicamentos, alimentos e outros bens em reas de difcil acesso ou sob condies insalubres. Contudo, algumas questes importantes para o uso prtico de um VANT na rea de transporte devem ser consideradas, uma vez que essa modalidade de uso para esses veculos comeou a ganhar ateno apenas recentemente. Uma das questes iniciais trata a respeito da regulamentao do uso de
Anais do II Workshop de Comunicao em Sistemas Embarcados Crticos - WoCCES 2014
18
-
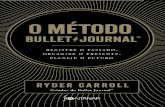
um VANT dentro do espao areo do pas. Nos casos anteriormente citados, tanto a Amazon quanto a DHL aguardam ainda a deciso de rgos governamentais sobre as condies necessrias para uso comercial desses veculos. Uma vez no esquecida a necessidade de regulamentao, estudos que viabilizaro o uso desses equipamentos para a realizao dessa tarefa de entrega devem ser realizados para permitir que, assim que as normas e regulamentaes estejam prontas os mesmos possam ser utilizados. Assim, alm da questo legal, o projeto de um VANT destinado entrega dever possuir recursos que garantam a confiabilidade do servio, bem como meios de autenticao e confirmao do recebimento, tanto por parte do remetente quanto por parte do destinatrio. Quanto ao veculo utilizado, este dever possuir capacidade de reter a carga no momento da decolagem, assim como liber-la aps o pouso. Dessa maneira, faz-se necessrio o uso de um dispositivo mecnico (controlado eletronicamente) adequado ao acoplamento da carga, como o exemplo apresentado em [Thomas et al. 2013]. Consequentemente, o veculo tambm dever ter as caractersticas que facilitem sua decolagem e pouso em ambientes com espao limitado; dessa forma, VANTs multirotores (como quadricpteros) seriam ideais para essa tarefa, dada sua capacidade para decolagem e aterrissagem vertical. Aps o acoplamento do pacote e decolagem, o VANT dever seguir o caminho at o destinatrio obedecendo uma rota ideal pr-definida, visando realizar a entrega no menor tempo possvel. Durante o trajeto (incluindo decolagem e pouso), ser necessrio detectar e evitar possveis obstculos, como prdios, postes, fios, rvores, entre outros. O veculo deve contar com recursos de transmisso de dados e telemetria, para que o remetente e o destinatrio do pacote possam rastre-lo durante o transporte. Esse rastreamento pode ser realizado com o uso de um aplicativo mvel, por exemplo. No momento da chegada ao destino, o VANT poder simplesmente aterrissar em um ponto pr-determinado e liberar o pacote, acionando o dispositivo mecnico de reteno/liberao. Porm, para casos em que seja necessria uma confirmao da identidade do receptor, preciso que exista um meio de autenticao. O diagrama exibido na Figura 2 ilustra o funcionamento em conjunto dos recursos existentes na arquitetura proposta do sistema.
Anais do II Workshop de Comunicao em Sistemas Embarcados Crticos - WoCCES 2014
19
-
Figura 2. Diagrama de funcionamento do sistema de entregas por VANT
Inicialmente, o remetente do pacote (1) estabelece a misso de entrega para o veculo, utilizando para tanto um tablet ou computador conectado Internet. Nesse momento, o pacote acoplado ao VANT. Todas as informaes relativas rota de entrega e destinatrio so gerenciadas pelo Web Service existente em (2). O VANT, equipado com um mdulo de transmisso de dados em rede GSM (3), recebe os dados da rota por meio do Web Service e inicia o trajeto ao destinatrio (4). Durante o percurso, tanto o destinatrio (4) quanto o remetente (1) podem acompanhar o trajeto do veculo. Os dados relativos posio e estado do veculo (3) so transmitidos ao Web Service (2), que os retransmite aos dispositivos usados por remetente e destinatrio. Quando o VANT se aproxima da rea de entrega (definida pelo controle de misso, em (1)), um aviso emitido ao Web Service, que o repassa ao destinatrio. Nesse momento, caso seja necessrio, pode ser realizada uma validao do receptor. Essa validao poder ser realizada por meio do uso de chaves criptogrficas e tokens de identificao (tanto para o receptor quanto para o emissor), gerenciados e transmitidos de forma segura pelo Web Service. O ponto exato de aterrissagem do VANT em (4) poder ser estabelecido previamente ou por meio de clculos relativos ao posicionamento do smartphone/tablet do destinatrio, considerando para tanto o uso de sensores de proximidade instalados no veculo para que no ocorram colises. Os componentes necessrios para implementao do sistema de entrega descrito abrangem um conjunto de hardware e software abertos que, como um objetivo mais especfico desta proposta, podero servir futuramente como plataforma de teste e validao de outras pesquisas dentro da rea de veculos areos no tripulados. Cabe ainda ressaltar que todas as conjecturas levantadas levam em conta um capacidade de energia renovvel para que o veculo possa percorrer todo o trajeto de entrega e retornar a base.
Anais do II Workshop de Comunicao em Sistemas Embarcados Crticos - WoCCES 2014
20
-
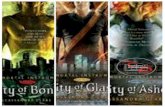
3. Estrutura do sistema No centro do sistema, encontra-se um VANT utilizado para o transporte de cargas, como o demonstrado em [Yakimenko et al. 2011]. Como citado anteriormente, veculos multirotores como quadricpteros so particularmente adequados a essa finalidade, em virtude da capacidade de VTOL (Vertical Take-Off and Landing). Em outro ponto do sistema, necessrio um conjunto de servios RESTful, que juntos formaro uma API de monitoramento e controle da misso de entrega. A especificao de uma API do tipo RESTful, semelhante proposta em [Ruppen et al. 2011], padronizada facilitar o desenvolvimento de aplicaes em diversas plataformas para uso do sistema de entrega. O diagrama exibido na Figura 3 ilustra a relao entre os elementos do sistema: a estrutura bsica do VANT equipado com microcontrolador e sensores; o servidor Web onde ser realizada a telemetria dos dados do veculo e autenticao do destinatrio do pacote; e os aplicativos mveis para controle da misso e rastreamento.
Figura 3.Diagrama simplificado do sistema de entrega
A arquitetura de implementao do VANT poder utilizar microcontroladores de padro aberto (como o Arduino), assim como seus sensores e mdulos de transmisso de dados (Figura 3). Para acoplamento da carga, ser necessrio o uso de servos conectados a algum tipo de mecanismo de reteno, como por exemplo uma garra robtica. Estudos recentes demonstram a viabilidade do acoplamento de dispositivo semelhante em um VANT. importante ressaltar que, em uma implementao prtica, devero ser considerados os pesos de todos os componentes em relao capacidade de carga til do VANT. Tais clculos devero ser realizados para o correto dimensionamento da potncia dos motores e tamanho das hlices do quadricptero. Os dados transmitidos entre o servidor, o VANT e os aplicativos (controle da misso e rastreador) seguiro o padro JSON, comumente usado em Web Services. Tais dados devero ser resumidos e com baixa complexidade, uma vez que a latncia existente em certos pontos da rede GSM de dados podem ser alta. A comunicao do transmissor GSM existente no VANT com os Web Services poder ser implementada de forma segura, usando o protocolo HTTPS.
Anais do II Workshop de Comunicao em Sistemas Embarcados Crticos - WoCCES 2014
21
-
No caso de perda de sinal da rede de transmisso de dados, o VANT poder ser programado (antes do incio da misso) para (a) retornar base ou (b) seguir o caminho at o destinatrio (caso ainda possua sinal do GPS ativo e no necessite dos recursos de autenticao). Tambm possvel agregar ao veculo outros recursos de transmisso de dados sem-fio para que o VANT possa ser controlado manualmente em casos imprevistos. A metodologia de desenvolvimento do piloto automtico do VANT [Neris 2001] [Trindade et al. 2010] e mdulos de controle e navegao seguir o padro MDD (Model Driven Development), com implementao inicial e testes feitos pelo MATLAB/Simulink, como realizado em [Bouabdallah e Siegwart 2007], [Neris 2001], [Ribeiro e Oliveira 2010], [Trindade et al. 2010], utilizando o toolbox Aerospace Blockset. O aplicativo utilizado pelo destinatrio, alm de possuir os recursos para rastreabilidade do VANT, poder tambm atuar como validador de sua identidade. No momento do confirmao do envio, o destinatrio enviar ao aplicativo do usurio (devidamente autenticado com login e senha) um token identificador, que dever ser confrontado com o mesmo valor obtido pelo VANT. Toda essa comunicao ser transmitida em um canal criptografado. Os Web Services podero ser definidos como servios RESTful usando as funcionalidades do Java EE 7. A aplicao de controle de misso, assim como o aplicativo de rastreamento utilizado pelo destinatrio, podero ser implementados para as principais plataformas mveis do mercado (iOS, Android ou Windows Phone), pois dependero unicamente do acesso aos servios RESTful. Toda a API disponibilizada pelos Web Services (e consumida pelo VANT e aplicativos mveis) dever ser padronizada para facilitar sua extenso e uso em diversas plataformas.
4. Consideraes Finais Este artigo apresentou uma proposta de um sistema de entrega de pacotes usando Veculos Areos No Tripulados, aliado recursos de arquitetura orientada a servios e aplicativos mveis. A implementao dever ser baseada no desenvolvimento baseado em modelos (MDD - Model Driven Development), como indicado em [Branco et al. 2011], e na utilizao de padres abertos de hardware e software. A implementao dessa arquitetura tambm poder abrir caminho para a implementao prtica de diversos modelos cientficos propostos, assim como agregao de nova tecnologias arquitetura. Como exemplo, pode ser citado o uso de chips de identificao por rdio frequncia (RFID) para proporcionar maior preciso na localizao do ponto de entrega (aterrissagem) do VANT, alm de oferecer outras formas de autenticao [Lehtonen et al. 2008].
5. Referncias Amazon Prime Air, Disponvel em:
Acesso em: 28 Fev 2014 Balas, C. Modelling and Linear Control of a Quadrotor. Master Thesis. Cranfield
University. 2007
Anais do II Workshop de Comunicao em Sistemas Embarcados Crticos - WoCCES 2014
22
-
Bouabdallah, S., Siegwart, R. Full Control of a Quadrotor. In:. IEEE/RSJ international conference on Intelligent robots and systems, 2007. IROS 2007. IEEE, 2007. p. 153-158.
Braga, R. T. V., Branco, K. R. C., Trindade Jr, O., Gimenes, I. M. S. Evolving Tiriba Design towards a Product line of Small Electric-Powered UAVs, In: 1a Conferncia Brasileira de Sistemas Embarcados Crticos, 2011, So Carlos. Anais do 1 CBSEC. So Paulo, EDUSP, 2011. p. 67-72.
Branco, K. R. L. J. C. ; Pelizzoni, J. ; Neris, L O ; Trindade, O. Jr ; Osrio, F S ; Wolf, D. F. Tiriba: A New Approach of UAV based on Model Driven Development and Multiprocessors. In: IEEE International Conference on Robotics and Automation - ICRA Communications, 2011, Shangai. IEEE International Conference on Robotics and Automation - ICRA Communications, 2011. p. 1-4.
DailyMail. "DHL tests delivery drone as airborne robots could be used to deliver medicine", Disponvel em: Acesso em 28 Fev 2014
Lehtonen, M., Staake, T., Michahelles, F. and Fleisch, E. "From Identification to Authentication A Review of RFID Product Authentication Techniques", In: Networked RFID Systems and Lightweight Cryptography, Edited by Peter H. Cole and Damith C. Ranasinghe, Springer Berlin Heidelberg, 2008 p. 169-187
Neris, L. O. Um Piloto Automtico para as Aeronaves do Projeto ARARA. Dissertao de Mestrado. Universidade de So Paulo. Dezembro, 2001.
Ribeiro, L. R., Oliveira, N. M. F. UAV Autopilot Controllers Test Platform Using Matlab/Simulink and X-Plane. In: 40th ASEE/IEEE Frontiers in Education Conference. Washington, DC. 2010.
Ruppen, A., Pasquier, J., & Hrlimann, T. A RESTful architecture for integrating decomposable delayed services within the web of things. International Journal of Internet Protocol Technology, 6(4), 247-259. 2011.
Thomas, J., Polin, J., Sreenath, K., & Kumar, V. Avian-inspired grasping for quadrotor micro UAVs. In ASME International Design Engineering Technical Conference (IDETC), Portland, Oregon. 2013.
Trindade Jr., O., Neris, L. O., Barbosa, L., Branco, K. R. L. J. C. . A Layered Approach to Design Autopilots. In: IEEE-ICIT 2010 International Conference on Industrial Technology, 2010, Via del Mar. IEEE-ICIT 2010 International Conference on Industrial Technology. Santiago do Chile: IEEE Press, 2010. v. v1. p. 1395-1400.
Yakimenko, O. A., Bourakov, E. A., Hewgley, C. W., Slegers, N. J., Jensen, R. P., Robinson, A. B., ... & Heidt, P. E. Autonomous Aerial Payload Delivery System "Blizzard". In: Proceedings of the 21st Aerodynamic Delivery Systems Technology Conference, AIAA, Dublin, Ireland (pp. 23-26). 2011.
Anais do II Workshop de Comunicao em Sistemas Embarcados Crticos - WoCCES 2014
23