PRIMITIVAS PARA A MODELAGEM E ANÁLISE DE SISTEMAS … · -conjunto de alternativas viáveis com...
12
PRIMITIVAS PARA A MODELAGEM E ANÁLISE DE SISTEMAS DE MANUFATURA M. Tazza Curso de Pós-Graduação em Engenharia Elétrica e Informática Industrial CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DO PARANÁ Av. Sete de Setembro. 3165 CEP 80.230-901. Curitiba - PR Resumo: O trabalho descreve primitivas de modelagem e análise comportamental de Sistemas Flexíveis de Manufatura . As primitivas estão baseadas em redes de Petri temporizadas. permitindo modelar padrões comportamentais simples de alocação. utilização e liberação de recursos no sistema de manufatura: estações de trabalho. paletes. elementos de trans- porte e de armazenamento. A sobreposição de primitivas segundo regras sintáticas e semânticas definidas permite a modelagem de padrões complexos de utilização de recursos. A associação de equações de fluxo de marcas na rede estabelece a relação entre a estrutura, marcação inicial e tempos de permanência das marcas em lugares da rede e os parâmetros quantitativos relevantes: desempenho. índices de utilização de recursos. gargalos, tempos de espera e população média no sistema. Palavras-Chave: Sistemas F/ex{veis de Manufatura. Modela- gem, Análise. Redes de Petri Abstract: The paper descrihes a set of primitives for the modeling and analysis of Flexible Manufacturing Systems. Simple pattems for lhe allocation. utilization and release of resources in a produetion environrnent are modeled by timed Petri nets primitives. Bach primitive is interpreted in terms of the hehavioral pattern and is associated to a set of equation lhat descrihes theflow of tokens in lhe net The equations relate lhe structure, initial marking and permanence time of tokens in lhe net to the performance pararneters of lhe system: lhrough- put, utilization rates, bottlenecks. induced wait times and population at relevant points in the system. • Artigo submetido em 28s0BI9O l' revisão em 24109192: 2 1 revisão em 26104194; Aceito sob recomendação do Ed.Cons. PretOr Fernando A.Gomlde. Key-words: F/exib/e Manufacturing Systems, Modeling, Ana/ysis. Petri Nets. 1 • INTRODUÇÃO Um Sistema Flexível de Manufatura (SFM) é definido corno um sistema de fabricação formado por estações de trabalho que compartilham um sistema de transporte e controle de forma a permitir a manufatura de um determinado espectro de peças sem necessidade de interromper o processo para a reconfigura- ção (Masif,1988). Os custos de projeto. implantação e operação de um SFM ditam a necessidade de avaliação de alternativas de projeto/implantação. O objetivo da avaliação é reduzir o -conjunto de alternativas viáveis com base em parâmetros de avaliação pré-definidos. Os parâmetros de avaliação podem ser financeiros (custo de instalaçã%peração. de movimentação de peças e ferramentas, etc.) e de desempenho (número de peças manufaturadas por unidade de tempo, índice de utilização de estações e transportadores, população média nos meios de armazenamentos, etc.). De forma geral, os parâmetros de desempenho fornecem urna descrição quantitativa do comporta- mento do sistema. O processo de avaliação de alternativas pode ser realizado em dois passos (Looveren et am. 1986). No primeiro. denominado screening, alternativas são avaliadas em alto nível de abstração. buscando a identificação das mais promissoras sob os critérios colocados. Avaliam-se aspectos gerais do projeto. levando em conta a interação entre os principais componentes do sistema (parte operativa, transporte, armazenamento). Num segundo passo (selection) as alternativas promissoras são detalhadas e a avaliação leva em conta aspectos de layout. controle. limitações sobre o número de paletes, planos de processos das peças, planos de produção. capacidades de buffers locais, estratégias SBA Controle & Automação Nol.6 n' 1fjaneiro-fevereiro 1995
Transcript of PRIMITIVAS PARA A MODELAGEM E ANÁLISE DE SISTEMAS … · -conjunto de alternativas viáveis com...
PRIMITIVAS PARA A MODELAGEM E ANÁLISE DESISTEMAS DE MANUFATURA
M. Tazza
Curso de Pós-Graduação em Engenharia Elétrica e Informática IndustrialCENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DO PARANÁ
Av. Sete de Setembro. 3165 CEP 80.230-901. Curitiba - PR
Resumo: O trabalho descreve primitivas de modelagem eanálise comportamental de Sistemas Flexíveis de Manufatura .As primitivas estão baseadas em redes de Petri temporizadas.permitindo modelar padrões comportamentais simples dealocação. utilização e liberação de recursos no sistema demanufatura: estações de trabalho. paletes. elementos de transporte e de armazenamento. A sobreposição de primitivassegundo regras sintáticas e semânticas definidas permite amodelagem de padrões complexos de utilização de recursos. Aassociação de equações de fluxo de marcas na rede estabelecea relação entre a estrutura, marcação inicial e tempos depermanência das marcas em lugares da rede e os parâmetrosquantitativos relevantes: desempenho. índices de utilização derecursos. gargalos, tempos de espera e população média nosistema.Palavras-Chave: Sistemas F/ex{veis de Manufatura. Modelagem, Análise. Redes de Petri
Abstract: The paper descrihes a set of primitives for themodeling and analysis of Flexible Manufacturing Systems.Simple pattems for lhe allocation. utilization and release ofresources in a produetion environrnent are modeled by timedPetri nets primitives. Bach primitive is interpreted in terms ofthe hehavioral pattern and is associated to a set of equationlhat descrihes theflow of tokens in lhe net The equations relatelhe structure, initial marking and permanence time of tokens inlhe net to the performance pararneters of lhe system: lhroughput, utilization rates, bottlenecks. induced wait times andpopulation at relevant points in the system.
• Artigo submetido em 28s0BI9Ol' revisão em 24109192: 21 revisão em 26104194;Aceito sob recomendação do Ed.Cons. PretOr Fernando A.Gomlde.
Key-words: F/exib/e Manufacturing Systems, Modeling,Ana/ysis. Petri Nets.
1 • INTRODUÇÃO
Um Sistema Flexível de Manufatura (SFM) é definido corno umsistema de fabricação formado por estações de trabalho quecompartilham um sistema de transporte e controle de forma apermitir a manufatura de um determinado espectro de peçassem necessidade de interromper o processo para a reconfiguração (Masif,1988). Os custos de projeto. implantação e operaçãode um SFM ditam a necessidade de avaliação de alternativasde projeto/implantação. O objetivo da avaliação é reduzir o-conjunto de alternativas viáveis com base em parâmetros deavaliação pré-definidos. Os parâmetros de avaliação podemser financeiros (custo de instalaçã%peração. de movimentaçãode peças e ferramentas, etc.) e de desempenho (número depeças manufaturadas por unidade de tempo, índice de utilizaçãode estações e transportadores, população média nos meios dearmazenamentos, etc.). De forma geral, os parâmetros dedesempenho fornecem urna descrição quantitativa do comportamento do sistema.O processo de avaliação de alternativas pode ser realizado emdois passos (Looveren et am. 1986). No primeiro. denominadoscreening, alternativas são avaliadas em alto nível de abstração.buscando a identificação das mais promissoras sob os critérioscolocados. Avaliam-se aspectos gerais do projeto. levando emconta a interação entre os principais componentes do sistema(parte operativa, transporte, armazenamento). Num segundopasso (selection) as alternativas promissoras são detalhadas e aavaliação leva em conta aspectos de layout. controle. limitaçõessobre o número de paletes, planos de processos das peças,planos de produção. capacidades de buffers locais, estratégias
SBA Controle & Automação Nol.6 n' 1fjaneiro-fevereiro 1995
de escalonamento. etc. Enquanto o processo de screening podeser suportado por modelos analfticos. a complexidade envolvidano processo de selection requer, atualmente. o uso de simuladores.O objetivo do trabalho é apresentar um conjunto de primitivasbaseadas em redes de Petri temporizadas. voltadas à modelagem e análise de SFM. A seção 2 detalha o padrão fundamentai de modelagem. A seção 3 mostra as regras sintáticas para asobreposição de ocorrências do padrão fundamental visando amodelagem de padrões de posse simultãnea de recursos. Aseção 4 apresenta os detalhes de um estudo de caso.
2 - O PADRÃO FUNDAMENTAL
Detalham-se as características estruturais e comportamentais dopadrão fundamental de modelagem. Definem-se as equaçõesque descrevem o fluxo de marcas na rede. As equaçõesrelacionam a rede, sua marcação inicial e os tempos depermanência de marcas nos lugares da rede com os parãmetrosquantitativos de desempenho. A definição das característicasestruturais do padrão requer a introdução de conceitos básicosem Redes de Petri (Reisig.1985).
2.1 - Conceitos Básicos em Redes de Petri
Def-l: Uma tripla N = (S, T; F) é chamada de rede se esomente se
i) S e T são conjuntos disjuntosii) F ç ( S x T ) u ( T x S ) é a relação binária que define arelação de fluxo de N.
Os elementos de S e T são representados graficamente porcírculos e retãngulos, respectivamente. A relação de fluxo érepresentada por arcos dirigidos entre os círculos e retãngulosrespectivos. Os elementos de S são denominados lugares e oselementos de T são denominados transições. Por x E Ndesigna-se um lugar ou uma transição de N.
Def·2: Seja N uma rede. Para x E N
°X = ( y Iy F x ) é denominado o pré-conjunto de xx o = { x I x F y I é denominado o pós-conjunto de x
Def-3: Uma 6-upla N = (S. T; F. K. M. B ) é chamada umarede de lugar I transição (rede-PIT. Place/Transition·net) se esomente se:
i) (S. T; F) é uma rede finita.ii) K: S -+ N u {w } estabelece uma capacidade possivelmente ilimitada para cada lugar da rede.iii) B: F -+ N \ { O } atribui um peso a cada arco da redeiv) M: S -+ N u { w } é a marcação inicial dos lugares darede, respeitando a capacidade ( M (s) $ K(s) para todo SES)
A definição a seguir estabelece a regra de ocorrência detransições em uma rede-PIT.
Oef-4: Seja N uma rede-PIT.
2 SBA Controle & Automação Nol.6 n' lfjaneiro-fevereiro 1995
i) Um mapeamento M: S -+ N u ( w I é uma marcação deN se e somente se M(s) $ K(s) para todo SES.
Seja M uma marcação de N.
ii) Uma transição t ET é M-habilitada sss:
'd s E °t : M(s) ~ B (s. t)'d s E to: M(s) $ K(s) - B (t. s)
iii) Uma transição t E T M-habilitada pode gerar umamarcação seguinte a M. M' para cada SES:
M'(s) = M (s) - B (s. t) sss S E ot \ toM'(s) = M (s) + B (s. t) sss S E to \ otM'(s) = M(s) - B(s. t) + B (t. s) sss s E ot n to
A ocorrência da transição t que leva de M a M' é representadapor M [I> M·. Na representação gráfica de redes-PIT os arcosf E F são rotulados por B (f) se B(f) > I. A capacidade de umlugar SES é representada por k = K(s). A inscrição k = wcapacidade ilimitada) será omitida. Uma marcação M érepresentada desenhando M(s) marcas (pontos) ou O símbolo"+". simbolizando a marcação infinita, no lugar S.
2.2· Caracteristicas Estruturais do Padrão
Oef-5: Seja N = ( S. T; F ) uma rede. N é denominada decadeia aberta se e somente se:
i) S=(sO,sl.s2•...• sn}ii) T = ( tO. tI. 12•...• tn-I I
iii) F = ( ( si. ti) I O $ i $ n-I } u{ ( ti, si+l) I O $ i $ n-I I
A definição acima estabelece uma relação de ordem total. <o.sobre os elementos de S e T. Seja O $ i e j < n então si<o sj e ti <o tj se i < j. Numa cadeia aberta I S I = I T I +I. A Fig-I exemplifica cadeias abertas com I S I = 3, 4 e 5.
A inclusão de um novo lugar r e de dois arcos (r, tO) e (ln-I,r) origina a rede que define o escopo de aplicação do padrãofundamental:
Oef-6: Seja N= (S'. T; F') uma rede onde:
i) S· = S u { r }ii) F' = F u ( (r, tO). (ln-I, r) }A rede N define as características estruturais da primitivafundamental de modelagem se e somente se (S. T; F) é umacadeia aberta O padrão fundamental de modelagem é obtidopela adição de um lugar r e dois arcos (r. tO) e (ln-I. r) a umacadeia aberta. A Fig 2 mostra os padrões gerados a partir dascadeias abertas da Fig- J.
2.3· Caracteristicas Comportamentais doPadrão
Oef-7: Seja N = ( S. T; F. K. B. M ) uma rede-PIT. Ndefine uma primitiva quantitativa de modelagem se e somentese:

A marcação do lugar r é interpretada como a quantidade derecursos disponíveis. A marcação do lugar sO (infinita) modelaas infinitas solicitações à espera de atendimento. Os lugares dacadeia aberta modelam a utilização dos recursos. O peso dosarcos (r. tO) e (ln-I. r) modela a quantidade de recursosnecessários para o atendimento de uma solicitação.O tempo de utilização do recurso em um lugar s é visto comoum período de permanência de marcas em s. durante o qual aocorrência da transição em s' é inibida. O modelo temporalque define a permanência de marcas em um lugar está descritoem RichterO.
iv) M: S -+ N u { w }, a marcação inicial dos lugares darede. satisfaz:a- M (sO) = +b- M ( r) ~ B ( r. tO )c-M(s)= Opara todo J E (S \( sO})
Der-8: Seja a 6-upla ( S. T; F. K. B. M ) uma primitivaquantitativa de modelagem. A 7-upla N = (S. T; F. K. B. M. Z)é dita primitiva temporal de modelagem se e somente se
50 50 50
tO tO tO
51 51 51
tI tI tI
52 52 52
t2 t2
53 53
t3
Figura 1- Cadeias abertas com 3. 4 e 5 lugaresZ : S \ {sO. sn. r } -+ 9t+
Figura 2-Primitivas estruturais de modeiagem
i) ( S. T; F ) é uma primitiva estrutural
tO tO tO
u uI uI
tI tl tI
• u2 u2
t2 t2
• u1
t1
•.) b) c)
O mapeamento Z associa um tempo de permanência de marcas( real positivo) a cada lugar (excetuando o primeiro e último) da cadeia aberta de uma primitiva quantitativa de modelagem. Note-se que a marcação do primeiro lugar. M(sO). dacadeia modela as infinitas solicitações de recursos à espera deatendimento e o último lugar (sn) modela as solicitações jáatendidas. Para facilitar a associação dos lugares e transiçõesà interpretação dada. o lugar sO será rotulado como wo e olugar sn como e. Os outros lugares da cadeia são rotuladoscomo ui (utilização). i = 1.2..... n-l.
50 50 50
tO tO tO
51 51 51
ti ti ti
52 52 52
t2 t2
.3 .3
t3
ii) K: S -+ N u { w } associa uma capacidade ilimitada para cada lugar s da rede.
Figura 3-Primitivas temporais de modelagem
Uma primitiva temporal de modelagem define o padrão deutilização de recursos. A marcação inicial M(wO)= + estabeleceum número infinito de solicitações à espera de atendimento. A
B ( r. tO ) =B (tn-l. r ) =b • b E NB (s. t ) = B (t. s ) = 1 para todo arco nacadeia aberta de N
B: F -+ N \ { O I atribui um peso a cada arco da redetal que:a-b-
iii)
SBA Controle & Automação No1.6 n' 1fjanelro-fevereiro 1995 3
(3)
------,,: r,
õ----+- -I,_I
II
I MoW
,
-----_1r-- Ii ~o(r)
LMo(r)IBh.jDo(N) Io(d
IR(./): IR(N'):- --
J.l(wl =Do(N).Z(w')
1IJ(ui) ~ Do(N) • Z(Ul}
0.2 _
0,8 -
o,. -
o.• -
1.6 1.4
ta 1.0 _
0.8 0.6
0.4 -
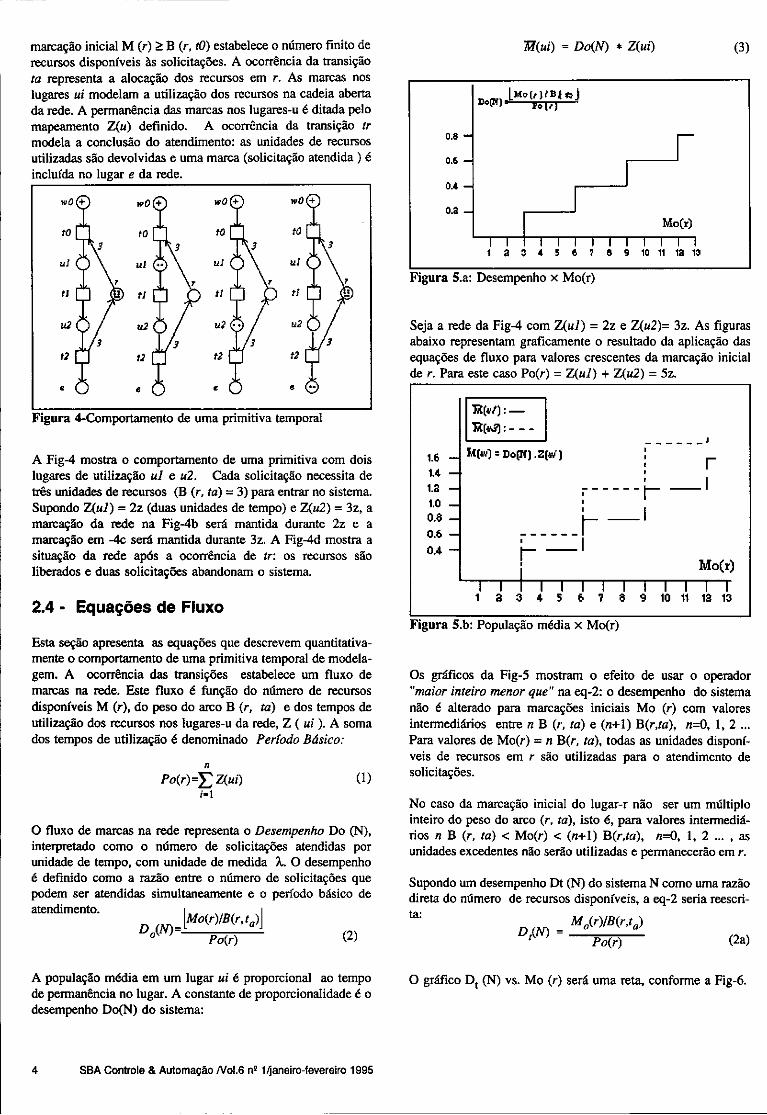
Figura S.a: Desempenho x Mo(r)
Seja a rede da Fig-4 com Z(ul) = 2z e Z(u2)= 3z. As figurasabaixo representam graficamente o resultado da aplicação dasequações de fluxo para valores crescentes da marcação inicialde r. Para este caso Po(r) = Z(ul) + Z(u2) = 5z.
tO
tJ
.2
uI
•
u2
tO
tJ
.2
uI
•
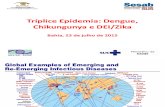
A Fig-4 mostra o comportamento de uma primitiva com doislugares de utilização uI e u2. Cada solicitação necessita detrês unidades de recursos (B (r, ta) = 3) para entrar no sistema.Supondo Z(ul) = 2z (duas unidades de tempo) e Z(u2) = 3z, amarcação da rede na Fig-4b será mantida durante 2z e amarcação em -4c será mantida durante 3z. A Fig-4d mostra asituação da rede após a ocorrência de tr: os recursos sãoliberados e duas solicitações abandonam o sistema.
Figura 4-Comportamento de uma primitiva temporal
marcação inicial M (r) ~ B (r, tO) estabelece o número finito derecursos disponíveis às solicitações. A ocorrência da transiçãota representa a alocação dos recursos em r. As marcas noslugares ui modelam a utilização dos recursos na cadeia abertada rede. A permanência das marcas nos lugares-u é ditada pelomapeamento Z(u) definido. A ocorrência da transição trmodela a conclusão do atendimento: as unidades de recursosutilizadas são devolvidas e uma marca (solicitação atendida) éincluída no lugar e da rede.
2.4· Equações de FluxoFigura S.b: População média x Mo(r)
Esta seção apresenta as equações que descrevem quantitativamente o comportamento de uma primitiva temporal de modelagem. A ocorrência das transições estabelece um fluxo demarcas na rede. Este fluxo é função do número de recursosdisponíveis M (r), do peso do arco B (r, ta) e dos tempos deutilização dos recursos nos lugares-u da rede, Z ( ui ). A somados tempos de utilização é denominado Perlodo Básico:
o fluxo de marcas na rede representa o Desempenho Do (N),interpretado como o número de solicitações atendidas porunidade de tempo, com unidade de medida À. O desempenhoé definido como a razão entre o número de solicitações quepodem ser atendidas simultaneamente e o período básico de
atendimento. l )jMo(r)IB(r,ta
D a(N)~ Po(r) (2) (2a)
M a(r)IB(r,ta)
Po(r)D,(N) ~
No caso da marcação inicial do lugar-r não ser um múltiplointeiro do peso do arco (r, ta), isto é, para valores intennediários n B (r, ta) < Mo(r) < (n+ I) B(r,ta), n=O, I, 2 ... , asunidades excedentes não serão utilizadas e pennanecerão em r.
Os gráficos da Fig-5 mostram o efeito de usar o operador"maior inteiro menor que" na eq-2: o desempenho do sistemanão é alterado para marcações iniciais Mo (r) com valoresintennediários entre n B (r, ta) e (n+l) B(r,ta), n=O, 1,2 ...Para valores de Mo(r) = n B(r, ta), todas as unidades disponfveis de recursos em r são utilizadas para o atendimento desolicitações.
Supondo um desempenho DI (N) do sistema N como uma razãodireta do número de recursos disponfveis, a eq-2 seria reescrita:
(1)n
Po(r)~E Z(ui)i-I
A população média em um lugar ui é proporcional ao tempode permanência no lugar. A constante de proporcionalidade é odesempenho Do(N) do sistema:
O gráfico Dt (N) vs. Mo (r) será uma reta, conforme a Fig-6.
4 SBA Cont.ole & Automação Nol.6 n' l~aneiro-fevereiro1995

Ct(N1 • "" (r )
A Fig-S plota o tempo induzido de espera no lugar r, Zw(r),em função da marcação Mo(r).
A Fig-6 mostra a diferença entre o máximo teórico D, (N) e ovalor real Do(N) para valores de Mo(r) não iguais a múltiplosinteiros do peso do arco B(r, ta). Neste caso as unidadesexcedentes estarão sempre disponíveis em no lugar r, originando um Indice de subutilização S (N) dos recursos.
(6)
1. 11
I""t)- "01,},'8t.) .""tllDo(N)
M(r) = Do(N) o B(r,ta) o Zw(r)
ZW()3.5
3.0
2.5
2.01.
1.5
1.0
0.5
A indução de um tempo de espera implica uma populaçãomédia diferente de zero no lugar r.
Figura 8 - Zw(r) xMo(r)
1 2 3 4 5 e 7 8 9 10 11 12 13
(4)
Mo(r)
(N)
·····::··:::·······r:-·::::······:~:·r:·::·:·t········..................--1--..------------ .. '...iL=------!
! !! '
..................o...;L:.*----L.....!:.....j l"
0.8
0.8
0.4
0.2
Figura 6 - D, (N) x Mo(r)
o índice de subutilização varia de zero (nos pontos em que D,(N) ; Do(N) ) a um valor limite de \.0 (nos casos em queDo(N) =O ou D, (N) » Do(N)). A Fig-7 mostra o gráfico S(N)vs. Mo(r) para o caso em estudo.
A Fig-9 mostra o valor médio das marcações nos luga"l,S deutilização ui e u2 e no lugar r. Para a determinação de M foiusado o valor do tempo de espera induzido em r, Zw ( r ).
M(r) x Mo(r)
S(N) - 1 • -Do(N)-
-I-__~OI(N)
1.0
0.8
0.6
0.4
0.2Mo(r)
1 2 3 4 S o 7 8 8 10 11 12 13
Figura 7 - S(N) x Mo(r)
2.0
1.&1.0IA1.2
1.00.&0.8
OA
M(uI) - Do(N) • ZJ.u/ IM(r) • Do(N) • zw(r ).I!( l/I )
~..~ ~..~._~_.
i
1 2 3 4 5 e 7 8 9 10 11 12 13
Mo(r)
Para Mo(r) < B(r, ta) o índice de subutilização é igual a \.0:não existem recursos suficientes e as unidades disponíveis sãocompletamente subutilizadas. Nos outros valores de Mo(r) oíndice de subutilização S(N) multiplicado pelo valor damarcação inicial Mo(r) indica quantas unidades de recursospodem ser eliminadas sem alterar o valor de Do(N).
Figura 9 - M(r) x Mo(r)
As equações apresentadas descrevem o fluxo de marcas numarede primitiva de modelagem. Cada equação foi interpretada emtennos de um parâmetro quantitativo de desempenho. Apróxima seção aborda a modelagem de padrões de utilizaçãode recursos mais complexos.
Um índice de subutilização maior que zero implica que asmarcas excedentes pennanecerão. não utilizadas, durante umcerto período de tempo, no lugar r. O valor do tempo depermanência é tal a "puxar" o valor de Dt(N) para o valor realDo(N). Este tempo de permanência induzido no lugar r devidoà subutilização é denominado tempo induzido de espera erepresentado por Zw(r).
Mo(r)/B(r, ta)
D o(N) = P ,lr)+Z (r) (5a)Mo(r{!B(r,t;f
Zw(r) = - Po(r)Do(N) (5b)
3· POSSE SIMULTÂNEA DE RECURSOS
A sobreposição de diversas ocorrências do padrão fundamentalpermite a modelagem e análise de padrões complexos dealocaçã<>-utilização-Iiberação de recursos. A seção 3.1 descrevea modelagem da posse simultãoea de recursos.
SBA Controle & Automação Nol.S nll 1~aneiro-fevereiro 1995 5
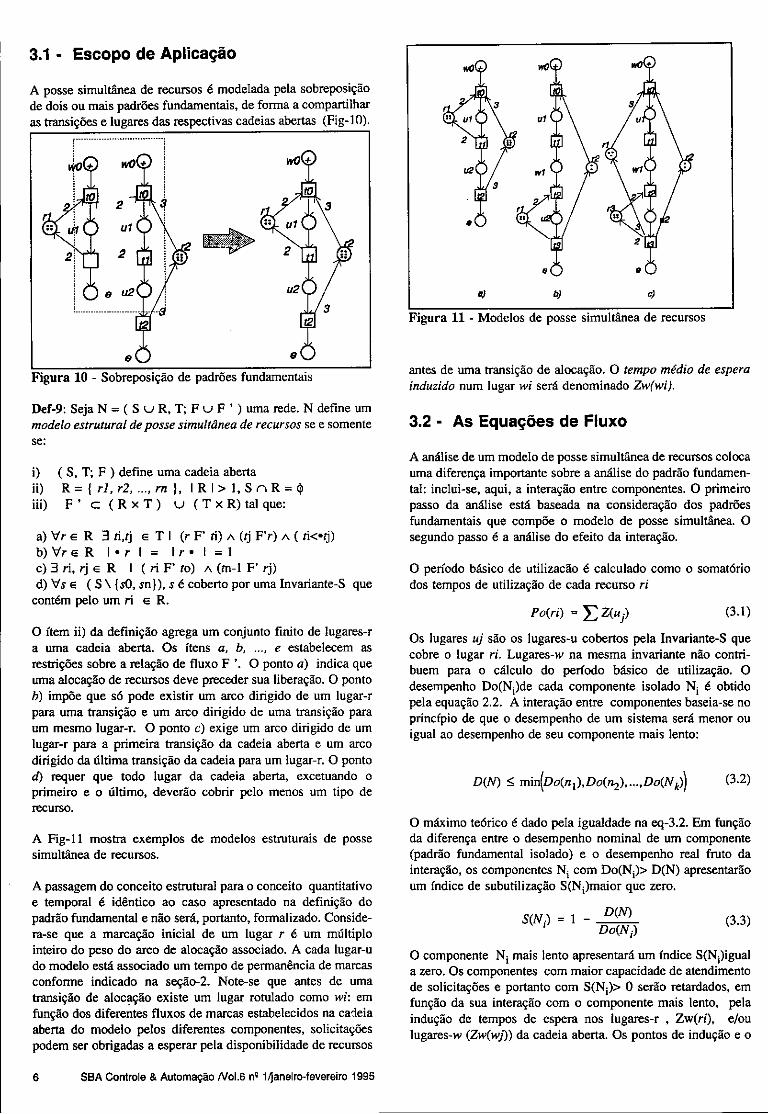
Figura 11 - Modelos de posse simultânea de recursos
clbl
antes de uma transição de alocação. O tempo médio de esperainduzido num lugar wi será denominado Zw(wi).
r--·--······ __················-_···
Figura 10 - Sobreposição de padrões fundamentais
A posse simultânea de recursos é modelada pela sobreposiçãode dois ou mais padrões fundamentais, de forma a compartilharas transições e lugares das respectivas cadeias abertas (Fig-lO).
3.1· Escopo de Aplicação
Def·9: Seja N ; ( S u R, T; F u F ' ) uma rede. N define ummodelo estrutural de posse simultânea de recursos se e somentese:
3.2· As Equações de Fluxo
O período básico de utilizacão é calculado como o somat6riodos tempos de utilização de cada recurso ri
A análise de um modelo de posse simultânea de recursos colocauma diferença importante sobre a análise do padrão fundamental: inclui-se, aqui, a interação entre componentes. O primeiropasso da análise está baseada na consideração dos padrõesfundamentais que compõe o modelo de posse simultânea. Osegundo passo é a análise do efeito da interação.
Os lugares uj são os lugares-u cobertos pela Invariante-S quecobre o lugar ri. Lugares-w na mesma invariante não contribuem para o cálculo do período básico de utilização. Odesempenho Do(Nj)de cada componente isolado Nj é obtidopela equação 2.2. A interação entre componentes baseia-se noprincípio de que o desempenho de um sistema será menor ouigual ao desempenho de seu componente mais lento:
(3.1)Po(ri) ~ L Z(u}
a) Vr E R 3 ri,lj E T I (r F' ti) A (Ij F'r) A ( ti<olj)b) Vr E R I o r I; I r o I ; Ic) 3 ri, rj E R I (ri F' lO) A (m-I F' rj)d) VS E (S \ {sO, sn)), s é coberto por uma Invariante-S que
contém pelo um ri E R.
i) ( S, T; F ) define uma cadeia abertaii) R = { rI, r2, ..., rn}, I R I > I, S n R; <I>
iii) F' C (R X T) u (T X R) tal que:
o ítem ii) da definição agrega um conjunto finito de lugares-ra uma cadeia aberta. Os ítens a, b, ..., e estabelecem asrestrições sobre a relação de fluxo F'. O ponto a) indica queuma alocação de recursos deve preceder sua liberação. O pontob) impõe que s6 pode existir um arco dirigido de um lugar-rpara uma transição e um arco dirigido de uma transição paraum mesmo lugar-r. O ponto c) exige um arco dirigido de umlugar-r para a primeira transição da cadeia aberta e um arcodirigido da última transição da cadeia para um lugar-r. O pontoti) requer que todo lugar da cadeia aberta, excetuando oprimeiro e o último, deverão cobrir pelo menos um tipo derecurso.
(3.3)
A Fig-li mostra exemplos de modelos estruturais de possesimultânea de recursos.
A passagem do conceito estrutural para o conceito quantitativoe temporal é idêntico ao caso apresentado na definição dopadrão fundamental e não será, portanto, formalizado. Considera-se que a marcação inicial de um lugar r é um múltiplointeiro do peso do arco de alocação associado. A cada lugar-udo modelo está associado um tempo de permanência de marcasconforme indicado na seção-2. Note-se que antes de umatransição de alocação existe um lugar rotulado como wi: emfunção dos diferentes fluxos de marcas estabelecidos na caieiaaberta do modelo pelos diferentes componentes, solicitaçõespodem ser obrigadas a esperar pela disponibilidade de recursos
O máximo te6rico é dado pela igualdade na eq-3.2. Em funçãoda diferença entre o desempenho nominal de um componente(padrão fundamental isolado) e o desempenho real fruto dainteração, os componentes Nj com Do(Nj» D(N) apresentarãoum índice de subutilização S(Nj)maior que zero.
S(N.) ~ I _ D(N)I Do(N)
O componente Nj mais lento apresentará um índice S(Nj)iguala zero. Os componentes com maior capacidade de atendimentode solicitações e portanto com S(Nj» O serão retardados, emfunção da sua interação com o componente mais lento, pelaindução de tempos de espera nos lugares-r , Zw(ri), e/oulugares-w (Zw(wj}) da cadeia aberta. Os pontos de indução e o
6 SBA Controle & Automação Nol.6 nQ 1ljaneiro·fevereiro 1995

3.3· Exemplo
Com este valor de espera no lugar wl o componente N2 irátrabalhar à mesma taxa do componente mais lento N3. Ocomponente NI interagindo com N2 será forçado a trabalhar àtaxa ditada por N2. tomada igual a 0.333Ã pela sua interaçãocom N3. Será induzido um tempo de espera Zw(rl) com valortal a trazer Do(N I) para o patamar de desempenho do sistema,D(N) = 0.333Ã.
Zw(rt) = [(Mo(r j ) / B(r\,lt )) / D(N)] - Po(rt )
Zw(rt ) = [1 / 0.333] - 2 = 1.0zDeterminado o valor D(N) para o sistema e os valores dostempos induzidos de espera é possível aplicar as equações parao cálculo da população média nos lugares da rede.
Jll(u j ) = D(N) * Z(u j ) = 0.333 * 2 = 0.666
Jll(u2) = D(N) * Z(u2) = 0.3333 * 3 = 1.0
Jll(wl) = D(N) * ZW(Wt) = 0.3333 * I = 0.3333
Jll(r\) = D(N) * B(r l • II) * Zw(r1) = 0.333 * 3 * I = 1.0
A próxima seção apresenta a aplicação das equações a umsistema de manufatura simples. A aplicação direta da equaçõespermitirá a deteminação do comportamento para o melhor epior caso do sistema. Finalmente, descreve-se a detenninaçãodo caso esperado comparam-se os resultados com os obtidospor simulação e com os obtidos pela aplicação de um modelosemi-Markoviano exato.
Como não há indução de tempo de espera em r2 e r3. apopulação média nestes dois lugares é zero.
Os componentes N Ie N2 são retardados pela indução de umtempo de espera. NI e N2 tentam trabalhar à própria taxa de0.5Ã e ·OAÃ. Inicialmente as solicitações são retiradas de wOa uma taxa de OAÃ e são colocadas em wl à taxa de OAÂ. Ocomponente N3 retira marcas de wl à taxa de 0.333Ã, induzindo um tempo de espera Zw(wl). O valor do tempo induzidoserá tal a trazer o desempenho de N2. Do(N2) para o patamarD(N).
Zw(wt ) = [(Mo(r2) / B(r2'/1)) / D(N)] - Po(r2)
Zw(wl) =[2 / 0.333] - 5 = 1.0z
O componente N3 é o componente mais lento. dita o comportamento do todo e apresentará um índice de subutilização S(N3)= O. Os componentes NI e N2 apresentarão um índice desubutilização de recursos maior que zero. expresso pela eq-3.3.S(Nt ) = I - D(N) / Do(NI ) = I - 0.333 / 0.5 = 0.333
S(N2) = I - D(N) / Do(N2) = I - 0.333 / 004 = 0.166
(3Aa)
(3Ac)
(3Ab)
Considera-se Z(ul) = 2z e Z(u2) = 3z. A disponibilidade inicialde cada tipo de recursos está representada pela marcação inicialdos lugares-r: Mo(rl) = 3. Mo(r2) =2 e Mo(r3) = 2. O pesodos arcos de alocação indica o número de unidades para umasolicitação. O periodo básico de utilização de cada recurso édado pela eq-3.1:
Po(rt ) = Z(ut ) = 2z
Po(r3) = Z("2) = 3z
Po(r2) = Z(ut ) + Z(u2) = 5z
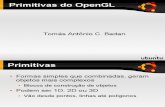
Figura 12 - Componentes de um modelo de posse simultâneade recursos
Seja o modelo de posse simultânea de recursos da Fig-12d. Oscomponentes N j do modelo são os padrões fundamentais daFig-12.a•.b e .c.
valor dos tempos induzidos dependem da estrutura de utilização dos recursos. A população média nos lugares da rede édada por
O desempenho de cada componente isolado é calculado embase à equação-2.2. 4· ESTUDO DE CASODo(Nt ) = (Mo(rt ) / B(rt.lt)) / Po(rt ) = 0.5ÃDo(N2) = (Mo(r2) Mr2.lt )) / Po(r2) = OAÃDo(N3) = (Mo(r3) / B(r3,13)) / Po(r3) = 0.333Ã 4.1· Descrição do Sistema
O desempenho do sistema, levando em conta a interação entreos componentes. é dado pela equação-3.2D(N) $ min(O.5. 004, 0.333) = 0.3331..
Considera-se um SFM composto por um conjunto de células detrabalho. numeradas I. 2..... m. Existe uma estação central comárea comum de armazenamento. C. com capacidade para Jjobs no sistema.
SBA Controle & Automação Nol.e nll 1Ijaneiro·fevereiro 1995 7
iii) Existe um número fixo. A. de AGVs no sistema.
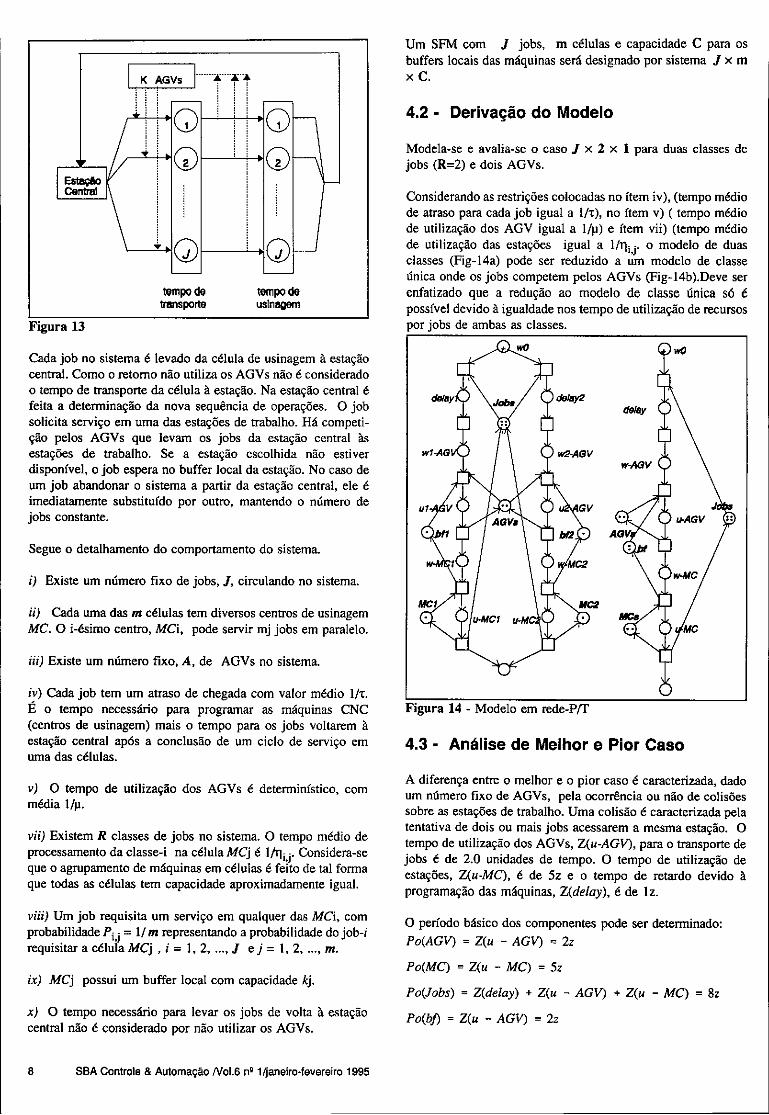
Um SFM com J jobs. m células e capacidade C para osbuffers locais das máquinas será designado por sistema J x mxC.
Figura 14 - Modelo em rede-Ptr
4.2· Derivação do Modelo
Modela-se e avalia-se o caso J x 2 x I para duas classes dejobs (R=2) e dois AGVs.
Considerando as restrições colocadas no ítem iv). (tempo médiode atraso para cada job igual a l/~). no ítem v) ( tempo médiode utilização dos AGV igual a I/Jl) e ítem vii) (tempo médiode utilização das estações igual a I/lli,j' o modelo de duasclasses (Fig-14a) pode ser reduzido a um modelo de classeúnica onde os jobs competem pelos AGVs (Fig-I4b).Deve serenfatizado que a redução ao modelo de classe única só épossível devido à igualdade nos tempo de utilização de recursospor jobs de ambas as classes.
4.3· Análise de Melhor e Pior Caso
19mpodeuslnogom
wmpodetransporta
Figura 13
Cada job no sistema é levado da célula de usinagem à estaçãocentral. Como o retorno não utiliza os AGVs não é consideradoo tempo de transporte da célula à estação. Na estação central éfeita a detenninação da nova sequência de operações. O jobsolicita serviço em uma das eslações de trabalho. Há competição pelos AGVs que levam os jobs da estação central àsestações de trabalho. Se a estação escolhida não estiverdisponível. o job espera no buffer local da estação. No caso deum job abandonar o sistema a partir da estação central. ele éimediatamente substituído por outro. mantendo o número dejobs constante.
Segue o detalhamento do comportamento do sistema
i) Existe um número fixo de jobs. J. circulando no sistema.
AGVs Inmn~ nf'"
r*-+---i-+lQ i i Q~+-->IG) f-------'-+->IG)
iv) Cada job tem um atraso de chegada com valor médio I/~.
É o tempo necessário para programar as máquinas CNC(centros de usinagem) mais o tempo para os jobs voltarem àestação central após a conclusão de um ciclo de serviço emuma das células.
ii) Cada uma das m células tem diversos centros de usinagemMC. O i-ésimo centro. MCi. pode servir mj jobs em paralelo.
v) O tempo de utilização dos AGVs é detenninístico. commédia W.
vii) Existem R classes de jobs no sistema. O tempo médio deprocessamento da classe-i na célula MCj é l/rli,j' Considera-seque o agrupamento de máquinas em células é feito de tal fonnaque todas as células tem capacidade aproximadamente igual.
A diferença entre o melhor e o pior caso é caracterizada. dadoum número fixo de AGVs, pela ocorrência ou não de colisõessobre as estações de trabalho. Uma colisão é caracterizada pelatentativa de dois ou mais jobs acessarem a mesma estação. Otempo de utilização dos AGVs. Z(u-AGV). para o transporte dejobs é de 2.0 unidades de tempo. O tempo de utilização deestações. Z(u-MC). é de 5z e o tempo de retardo devido àprogramação das máquinas. Z(delay). é de lz.
viii) Um job requisita um serviço em qualquer das MCi, comprobabilidade P jj = II m representando a probabilidade do job-irequisitar a célula MCj • i = 1,2, .... J e j = 1,2, .... m.
ix) MCj possui um buffer local com capacidade kj.
x) O tempo necessário para levar os jobs de volta à estaçãocentral não é considerado por não utilizar os AGVs.
O período básico dos componentes pode ser detenninado:Po(AGV) = Z(u - AGV) = 2z
Po(MC) = Z(U - MC) = 5z
Po(Jobs) = Z(delay) + Z(u - AGV) + Z(u - MC) = 8z
Po(bJ) = Z(u - AGV) = 2z
8 SBA Controle & Automação Nol.6 n' 1/janeiro-fevereiro 1995

o período básico das posições no buffer das máquinas englobao transporte: um job s6 é levado à máquina se o buffer estiverdisponível.
a) Análise do Melhor Caso
o melhor caso corresponde à situação em que sempre que doisjobs tentarem o acesso às máquinas, eles endereçam máquinasdistintas. A nlvel do modelo da Fig-14b, significa uma disponibilidade permanente de duas máquinas, representada por umamarcação inicial Mo (MC)=2. A tab-l mostra a curva dedesempenho do sistema em função do número de jobs nosistema. As entradas da tabela representam uma aplicaçãodireta da eq-3.2.
AO
.36
.31
.22
.1.
13
llosorr<>on'" (jobsIun-_)
D(N)~ --"~",,,,º---
• Slmuleçio• Alam et ali (8J rnodK) tJ2+ Mo&.IIO ter'I"lI-NlII1covIano 0XIlt0A 111.':-"'; f1
Tabela 1 - O(N)mc x J
J Do(Jobs) Do(AGV) Do(bf) Do(MC) D(N)mc
1 o.,,,, I.U 1.0 0.4 0.1252 0.25 1.0 1.0 U.' U.'"
3 0.3/' LU 1.<r 0.4 0.3754 0.5 1.0 '.0 u" U.'
5 0.020 LU 1.0' 0.4 0.4
;m ~.75 1.0 1.0 O•• O..
o número de jobs no sistema representa o recurso crítico paraMo(Jobs) :;; 3. Para 4 ou mais jobs no sistema o recurso crIticoé representado pelas duas estações de trabalho que colocam opatanlar de desempenho em O(N)= 0.411..
b) Análise do Pior Coso
o pior caso corresponde à situação de colisão permanente sobreum das estações de trabalho. É representada por uma marcaçãoMo(MC)=\. no modelo da Fig-14b.
Tabela 2 - D(N)pc x J
J Do(lobs) Do(AOV) Do(bO Do(MC) D{N)po
I O.H> U LU 0.2 u.m2 "" LU J.O) 0.2 u-'3 o:m 1.0 LO 0.2 0-'-. -,,:,- 1.0 . 1.0 -QT
--,- --=- 1.0 . LO
;o 0.615 \.0 LO u.2 U"
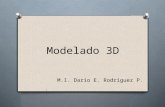
No pior caso o comportamento é ditado pelas células já a partirde dois jobs no sistema. A Fig-IS compara os resultadosobtidos por diversos métodos com os de melhor e pior casocalculados.
o cálculo de melhor e pior caso permite situar, a um custocomputacional muito baixo, os limites de desempenho dosistema. Na próxima seção descreve-se o refinamento dasolução onde, aumentando o custo computacional envolvido. épossivel determinar O caso esperado para o sistema.
Figura 15 - Comparação de resultados
4.4 - Análise do Caso Esperado
o refinanlento da solução está baseado na possibilidade deO(N) < min (Do (Ni» na eq-3.2. Esta possibilidade é decorrenteda existência de uma probabilidade determinável de queocorranl situações de colisão sobre o recurso endereçável Me.Em outras palavras, o sistema oscilará entre diversos estados,correspondentes a situações sem colisão, colisão parcial ecolisão total sobre as máquinas. A análise do caso esperadoconsidera que O sistema tenta trabalhar à taxa máxima (semcolisões) e introduz então o efeito das perturbações (colisõessobre os recursos endereçáveis) que trazem o sistema ao casoesperado.
o método de aproximação será detalhado no Algoritmo deaproximação.
Algoritmo de Aproximação
[1] Determinação do número médio de jobs competindo pelosrecursos endereçáveis
lfJ = iH(w - MC) = D(N) . Zw(w - MC)
A determinação do número médio de jobs em competiçãoimplica o cálculo do tempo de espera induzido em w-MC.
[2] Expressão de /fJ como uma soma ponderada de inteirosque satisfazem
qo * O + ql * I + q2 * 2 + ... + qn * n = If.
n
}:>i = 1.0i=O
O :;; qi :;; 1.0
o sistema acima tem infinitas soluções. Escolhe-se a soluçãoonde os qj'S siganl uma distribuição binomial privilegiando
valores em tomo do valor médio lfJ = n • p,
SBA Controle & Automação Nol.6 n' l~aneiro-fevereiro1995 9

bn,p(k){:) * pk * (l_p)n-konde n é o número máximo de jobs concorrendo pelos recursoscompartilhados, k E {O, 1, 2, ooo,n} é o número de jobs emcompetição numa detenninada situação, p é a probabilidade dovalor médio e
ln) n!k ~ k!(n k)!
[3]ldentijü:alião das situações de conflito e determinalião dopeso de cada situaçãoo
Seja c(k,m) a colisão de k jobs sobre m células. A probabilidadede ocorrência da situação de colisão, função da probabilidadede referência dos jobs a cada recurso endereçavel é w(c(k.m)).O cálculo de w(c(k,m)) é efetuado, de fonna direta, sobre amatriz de probabilidade de referência dos jobs às máquinas.
[4] Cálculo do valor esperada de desempenho D(N) do siste-
ma na:resença de (c~~~:g )D(N) ~ E bn, p(k) o E w(c(k,m)) o D(N)k.m
k'() m·I
onde D(Nh.m representa o desempenho do sistema com k jobscompetindo por m células e D(N) o valor esperado com Mo(Jobs) no sistema.
O algoritmo de valor esperado será aplicado em detalhes paravalores crescentes de jobs no sistema. Os dados invariantes sãoPo(Jobs)=8z, Do(AGV) = I.OÀ, Do(MC)sc = O.4À eDo(MC)cc= 0.2À. A probabilidade de referência dos jobs àsduas células é 0.5.
Passo [1 JDe~rmlnação do número médio dejobs #J em competição.
No melhor caso (sem colisão) não há indução de tempo deespera em w-MC (Zw(w-MC)mc=O). No pior caso, os componentes Jobs e Bt, que cobrem o lugar w-MC serão retardadospela indução de um tempo de espera (Zw(w-MC)pc>O). Nasequações abaixo Zw(w-MCINj)representa o tempo de esperainduzido pela interação do componente MC com o componenteNi·
Zw(w-MC/J) ~ Mo(Jobs) - Po(Jobs)D(N)pc
Zw(w-MC/B) ~ Mo(BfJ - Po(BfJD(N)pc
Zw(w-MC)pc ~ min(zw(w - MC/J), Zw(W - MC/BfJ)
O tempo final Zw(w-MC)f será a soma ponderada dos doisvalores.
Zw(w-MC)f ~ 0.5 o Zw(w - MC)mc + 0.5 o Zw(w-MC)pc
10 SBA Controle & Automação Nol.6 n' 1~aneiro-fevereiro1995
ºnúmero de jobs em competição é dado pela marcação médiaM(w . MC) calculada usando a eq-3.4b com o valor de desempenho dado pela ponderação do melhor e pior caso:
D(N) ~ 0.5 o D(N)cc + 0.5 o D(N)sc
J=I:Com um job no sistema não há competição pelos recursos. Odesempenho é ditado pelo componente mais lento, Do(jobs) =0.125À.
J=2: As equações fornecem:
Zw(w -MC/J) ~ .2... - 8 = 2z0.2
IZw(w-MC/BfJ ~ _ - 2 ~ 3z0.2
Zw(w - MC)pc ~ min(2, 3) ~ 2z
Zw(w-MC)f ~ 0.5 . O + 0.5 . 2 ~ Iz
D(N) ~ 0.5 o 0.2 + 0.5 o 0.25 ~ 0.225À
M(w - MC) ~ 0.225 . I ~ 0.225
A tabela-3 resume os valores calculados. Deve ser observadoque para J = 2 e 3 o desempenho máximo do sistema é dadopelo componente Jobs com valores respectivos de 0.25À e0.375À.
TABELA-3:
J Zw(w- Me), D(N) M(w-MC)
1 0.0 0.125 0.0
< 1.U u.<<:, u.<<:,3 1.5 U.<O/O u....,,<O4 1.' u.~ u.4>o 1.0 u.~ U.4'
" 1.' U.~ 0.4'
.U 1., o.~ 0.4>
O valor da marcação média em w-MC.!epresenta o número dejobs em competição pelos recursos /tJ.
Passo [2J Expressão de #J como uma somaPQnderada segundo a distribuiçãobinomial.
Esta expressão significa que um dado valor médio (real) de jobsem competição será expresso como uma soma de inteiros k E
(O, I, ... }. O valor máximo, 2, é colocado em função darestrição sobre a capacidade dos annazéns associados àsestações de trabalho, confonne o modelo da Fig-14b.

Passo [3] Determinação do peso das situações de conflito.
e 0.56875 . [0.0 . 0.2 + 1.0 . 0.375]
+ 0043125 . [0.5 . 0.2 + 0.5 . 0.3755]
e 0.33726Â.
e 0.600625 • [0.0'0.2 + 1.0'004]+ 0.34875 . [0.5 '0.2 + 0.5 '004]+ 0.050625 . [0.5 '0.2 + 0.5 '004]e 0.36Â.
J= 4:
D(Ni e bt.p(O) • [w(c(O,I)) . D(Niee + w(c(0,2)) . D(Nise]
+ bei l ) . [w(c(l,l)) . D(Niee + w(c(l,2)) . D(Nise]
+ b1.p(2) • [w(c(2,1)) • D(Niee + w(c(2,2)) • D(Nise]
J= 3:
D(Ni e b),p(O) . [w(c(O,I)) . D(Nice + w(c(0.2)) • D(Nise]
+ b1•p(l) . [w(c(I,I)) • D(Nice + w(c(I,2)) . D(Nise]
-
J #J P k bn n(k)
O 0.110
2 0.225 0.225 1 0.225O 0.56875
3 0.43125 0.43125 1 0.43125O U.OUUO<"
4 0.45 0.225 1 0.348752 0050625O 0.600625
5 0.45 0.225 1 0.348752 0050625
Para J ~ 5 não há alteração nos valores de bn.P{k). Note-se quepara J ; 2 e 3 não há possibilidade de M(w-MC);2 e aexpressão deste valor médio como soma ponderada não leva emconta o valor de k;2. Em função deste fato o cálculo daprobabilidade do valor médio, p, é feita sobre um job e nãosobre dois ou !rés.
2
TABELA-4: lfJ e }:> . bn.p(k)k.,(J
2830
I
.......
'"I , I
18
I
1284
I ' I , I
_1__)D(N)
~---------"""""-"""'-
0.27
0,31
0.30
0.22
0.18 i'- i
i0.13 I
O...
0.04
OAO
A Fig-16 mostra os valores do desempenho para o casoesperado.,
com semJ k colisão w(c(k,m)) colisão w(c(k,m))
c (k,m) c (k,m)2 Ir C(lI,1 ) O
~(;O,:i ' .01 c(I,1 ) 0.5 0.5
3 O C(0,1) O c (0,<) l.U1 c(I.1 ) 0.5 c (1,2) 0.5U C(0,11 U c (U,<) LU
4 1 c(I,1 ) 0.5 c (1,2) 0.52 c (2,1) 0.5 c (2,2) 0.5O C(0,11 o c (0,<) l.U
5 1 c(1,1) 0.5 c (1,2) 0.52 c (2,1) 0.5 c (2.2) 0.5
TA"dELA-S: w(c(k m))
Passo [4]
Para N ~ 6 a situação é idêntica à descrita para N;5.
Figura 16 - Plotagem do caso esperado
J; 1:Com um job no sistema não existem situações de colisão. Odesempenho do sistema é ditado por D(N);Q.125À.
5 - CONCLUSÃO
J; 2:
D(Ni e bt,p(O) • [w(c(O,I)) • D(Niee + w(c(0,2)) . D(Ni.,e]
+ bj,pO) • [w(C(I,I)) • D(Niee + w(c(l,2)) . D(Nise]
e 0.775 . [0.0 • 0.2 + 1.0 . 0.225]
+ 0.225 • [0.5 . 0.2 + 0.5 . 0.225]
e 0.2109375Â.
Apresentou-se um conjunto de primitivas baseadas em Redes dePetri temporizadas para a modelagem da utilização de recursosem sistemas flexíveis de manufatura. Equações de fluxoestabelecem a relação entre a rede (estrutura, marcação iniciale tempo de permanência de marcas) e os parâmetros quantitativos do sistema modelado: desempenho, gargalos, índices deutilização e população média. A um custo computacional baixopode ser detenninado o melhor e o pior caso para o sistemaRefinando a análise e elevando o custo computacional épossível determinar o caso esperado.
A determinação dos limites de desempenho (melhor e pior caso)tem valor prático limitado se o número de recursos endereçáveis for significativo. Dentro do processo de screening de
SBA Controte & Automação Nol.6 nll 1/janeiro-fevereiro 1995 11
alternativas os valores limites permitem eliminar as alternativascatastróficas ~ onde o melhor caso para ~ está pr6ximo aopior caso de outras alternativas. Ainda no processo de sereening, o método de aproximação para o caso esperado permiteuma ulterior redução no número de alternativas remascentes. Noprocesso de selection a limitação dos modelos analíticos éditada pelo número de recursos endereçáveis a serem modeladospara obter uma descrição mais ou menos fiel da realidade.
A análise quantitativa de sistemas com posse simultânea derecursos foi abordada pelo método dos surrogates por Jacobsonet a/li (1982). O problema não é crítico se as unidades derecursos de um mesmo tipo forem indistinguíveis. O problemasurge quando jobs solicitam ocorrências de um tipo de recursosegundo uma matriz de probabilidade de referência Mesmoneste caso, se matriz de referência das solicitações aos recursosendereçáveis for equiprovável, o problema do custo computacional é contornável pelo uso dos números de Stirling nocálculo das probabilidades das colisões. No caso estudado, seas duas estações forem indistinguíveis para os jobs que assolicitam, não haverá situação de colisão e a análise restringe-sea um estado com desempenho D(N) = 0.41... Por outro lado,num sistema com quatro estações endereçáveis e distinguíveis,a análise deve levar em conta quatro estados básicos: colisãototaI, colisão sobre duas máquinas, colisão sobre trés e nãocolisão. Ainda, se a capacidade dos armazéns locais dasestações for maior que um, há a explosão de estados: cadasituação de colisão deverá ser analisada para o conlunto devalores que originam um determinado valor médio #J de jobsenvolvidos na concorrência.
REFERÊNCIAS BIBLIOGRÁFICAS
Alam, M. et alii. (1985), Performance Modeling and Evaluationof Flexible Manufacturing Systems using Semi-Markow Approach, in Raouf, A. & Ahmed, S.l. eds,Flexible Manufacturing Res. andTechnology, Elsevier,Amsterdam, 87-118.
Jacobson, P. A & E. D. L3zowska (1982), Analysingqueueing networks with simultaneous resource possession, Comm. ACM 25, 142-151.
Looveren, AJ. et alii, (1986), A Review of FMS PlanningModels, in Kusiak, A (ed.) Modeling and Design DfFMS. Elsevier.
Masip, R.F. (1988) La Fábrica Flexible, Marcombo, BoixareuEditores, Barcelona
Reisig, W.(l985) Petri Nets: an Introduction, Springer Verlag,Berlin.
Richter, G. O, Clocks and their use for time modeling, ln:Sernadas, A. et alii eds. Information Systems, Theoretieal and Formal Aspeets, North-Holland, Amsterdam,pp 9-66.
12 SBA Controle & Automação Nol.6 n' l~aneiro-fevereiro1995
Tazza, M., (1987) Quantitative analysis of a resource allocationproblem: a net theory based proposal, in Voss, Genrich& Lautenbach (eds.) Advances on Petri Nets APN87,Sringer Verlag, Berlin.
Tazza, M.,(jan. 1988) Análise Quantitativa de Sistemas, EdiçãoEBAJ. Curitiba
Taiza, M., (sel/out 1991), Modelagem e Análise de uma Célulade Manufatura. Controle & Automação, Revista daSBA, vaI. 3 , n. 2, pp 352-369.
Apoio Financeiro:
CNPq, proc. 305504/85-1FlNEP, conv. 52.90.0165.00CNPq/PCDT, proc. 680019/92-0