Métodos Avançados em Sistemas de Energia Eletrônica de...
21
Departamento de Engenharia Elétrica Métodos Avançados em Sistemas de Energia Eletrônica de Potência para Geração Distribuída Transformadas de Park – Compensador de Corrente Prof. João Américo Vilela [email protected]
-
Upload
duongquynh -
Category
Documents
-
view
213 -
download
0
Transcript of Métodos Avançados em Sistemas de Energia Eletrônica de...
Departamento de Engenharia Elétrica
Métodos Avançados em Sistemas de Energia
Eletrônica de Potência para Geração Distribuída
Transformadas de Park – Compensador de Corrente
Prof. João Américo Vilela
Eletrônica de Potência para Geração Distribuída
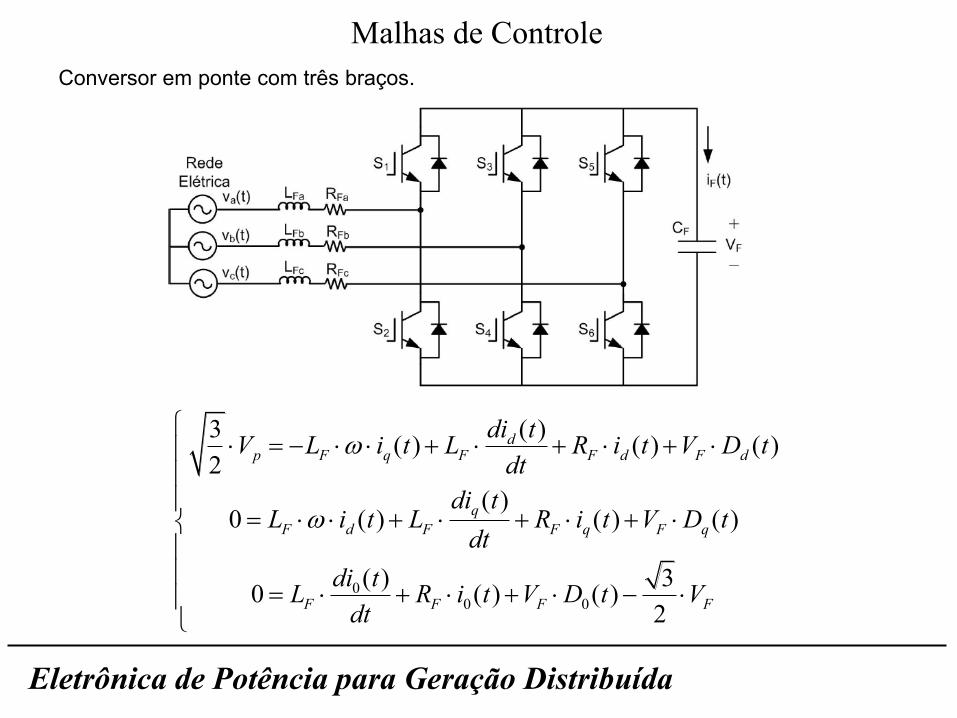
Malhas de Controle
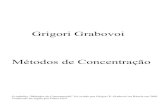
Conversor em ponte com três braços.
00 0
3 ( )( ) ( ) ( )
2
( )0 ( ) ( ) ( )
( ) 30 ( ) ( )
2
dp F q F F d F d
q
F d F F q F q
F F F F
di tV L i t L R i t V D t
dt
di tL i t L R i t V D t
dt
di tL R i t V D t V
dt
Eletrônica de Potência para Geração Distribuída
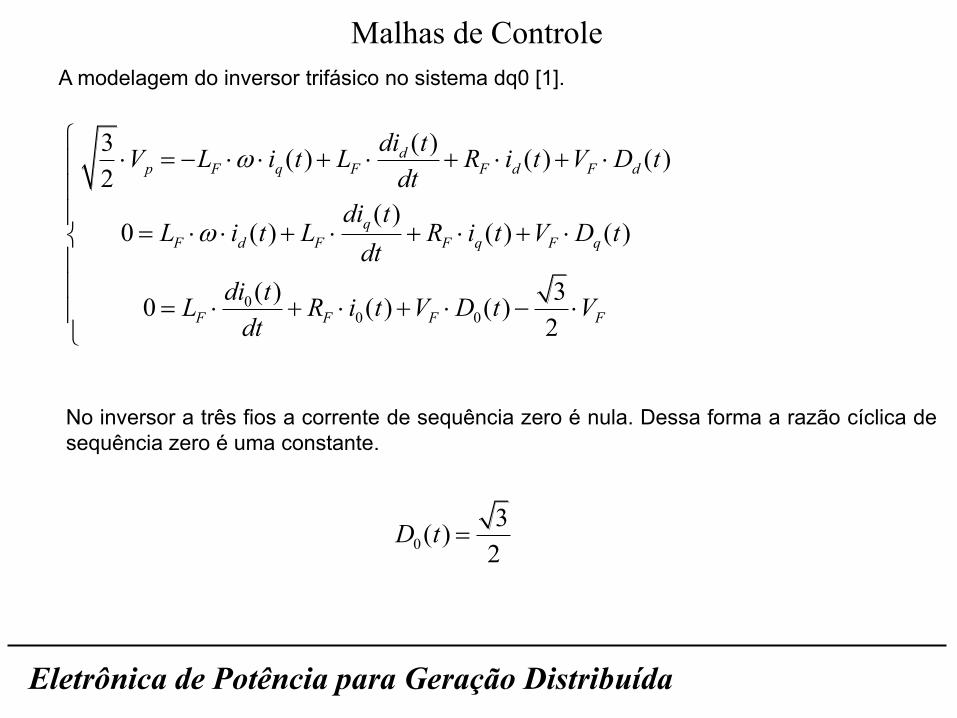
Malhas de Controle
A modelagem do inversor trifásico no sistema dq0 [1].
00 0
3 ( )( ) ( ) ( )
2
( )0 ( ) ( ) ( )
( ) 30 ( ) ( )
2
dp F q F F d F d
q
F d F F q F q
F F F F
di tV L i t L R i t V D t
dt
di tL i t L R i t V D t
dt
di tL R i t V D t V
dt
No inversor a três fios a corrente de sequência zero é nula. Dessa forma a razão cíclica de
sequência zero é uma constante.
0
3( )
2D t
Eletrônica de Potência para Geração Distribuída
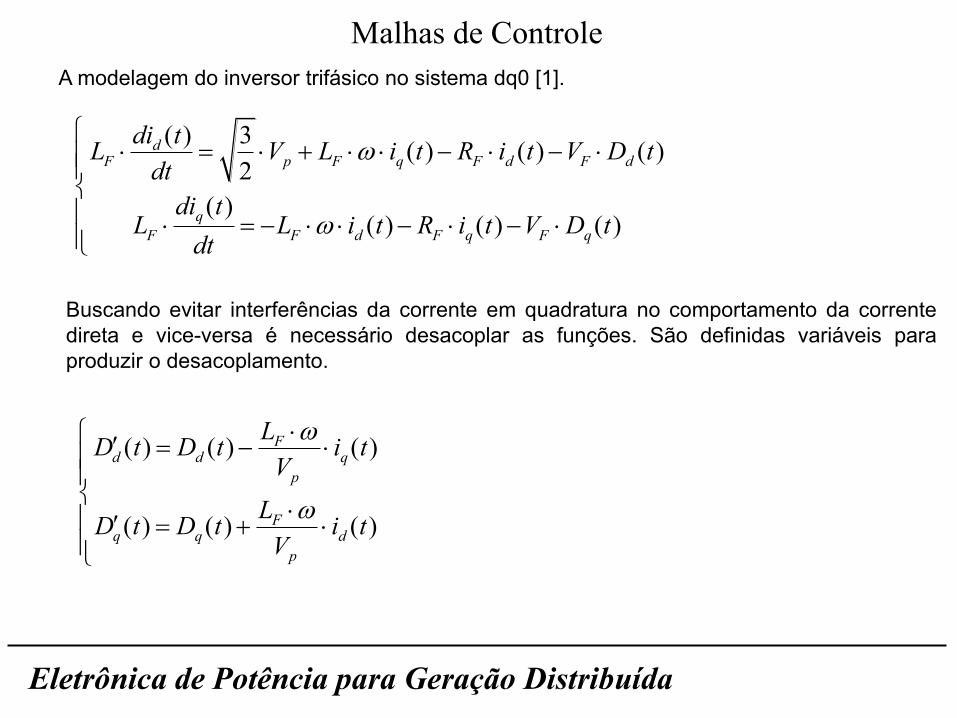
Malhas de Controle
A modelagem do inversor trifásico no sistema dq0 [1].
( ) 3( ) ( ) ( )
2
( )( ) ( ) ( )
dF p F q F d F d
q
F F d F q F q
di tL V L i t R i t V D t
dt
di tL L i t R i t V D t
dt
Buscando evitar interferências da corrente em quadratura no comportamento da corrente
direta e vice-versa é necessário desacoplar as funções. São definidas variáveis para
produzir o desacoplamento.
( ) ( ) ( )
( ) ( ) ( )
Fd d q
p
Fq q d
p
LD t D t i t
V
LD t D t i t
V
Eletrônica de Potência para Geração Distribuída
Malhas de Controle
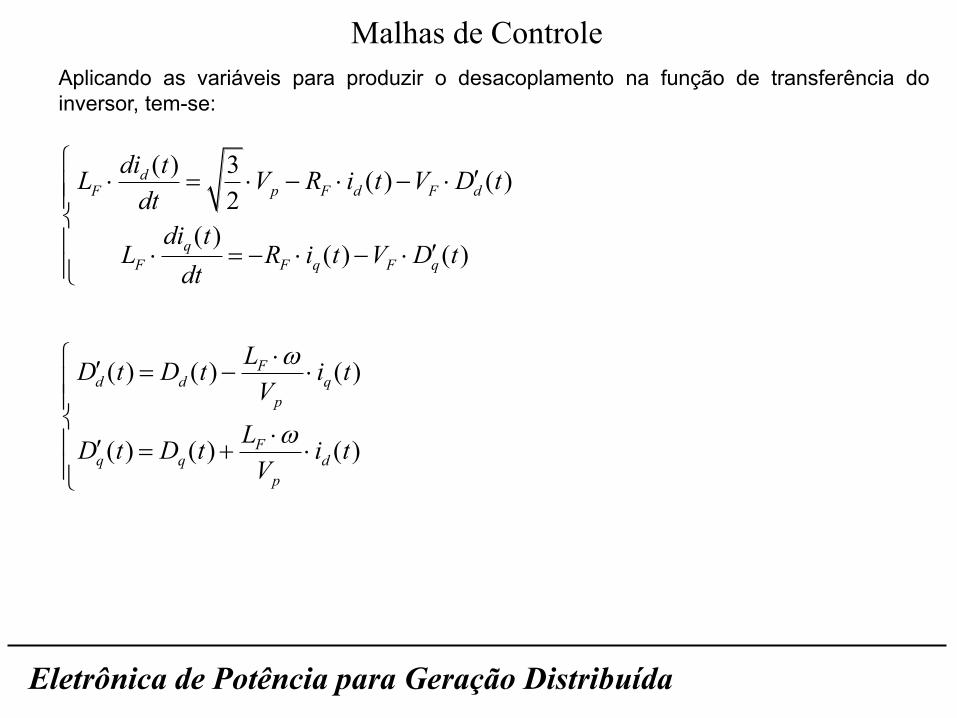
Aplicando as variáveis para produzir o desacoplamento na função de transferência do
inversor, tem-se:
( ) 3( ) ( )
2
( )( ) ( )
dF p F d F d
q
F F q F q
di tL V R i t V D t
dt
di tL R i t V D t
dt
( ) ( ) ( )
( ) ( ) ( )
Fd d q
p
Fq q d
p
LD t D t i t
V
LD t D t i t
V
Eletrônica de Potência para Geração Distribuída
Malhas de Controle
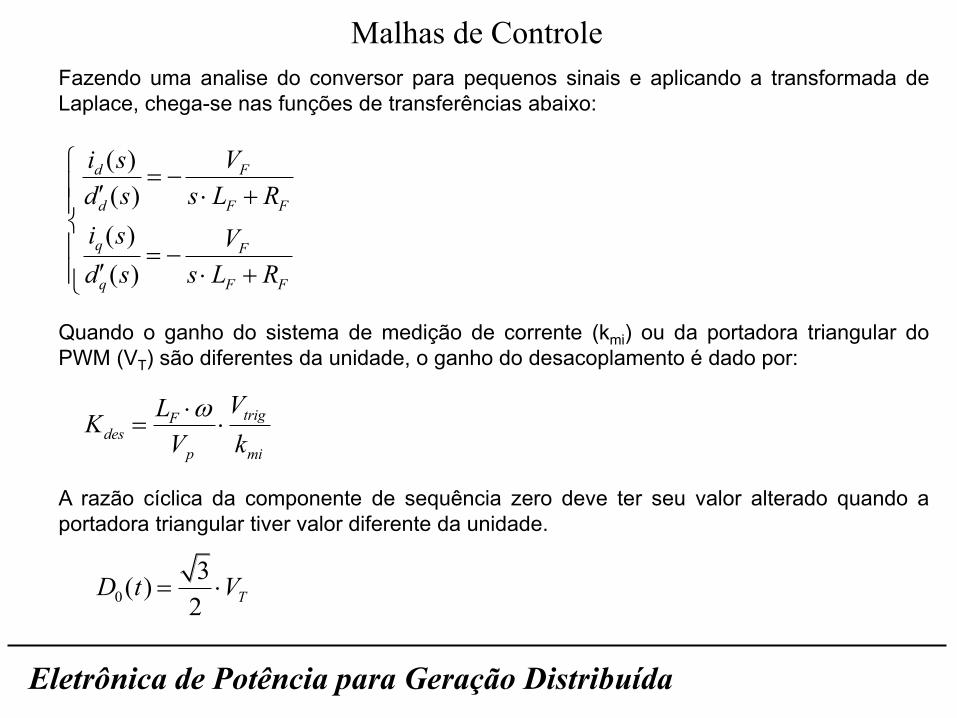
Fazendo uma analise do conversor para pequenos sinais e aplicando a transformada de
Laplace, chega-se nas funções de transferências abaixo:
( )
( )
( )
( )
d F
d F F
q F
q F F
i s V
d s s L R
i s V
d s s L R
Quando o ganho do sistema de medição de corrente (kmi) ou da portadora triangular do
PWM (VT) são diferentes da unidade, o ganho do desacoplamento é dado por:
trigFdes
p mi
VLK
V k
A razão cíclica da componente de sequência zero deve ter seu valor alterado quando a
portadora triangular tiver valor diferente da unidade.
0
3( )
2TD t V
Eletrônica de Potência para Geração Distribuída
Malhas de Controle
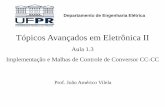
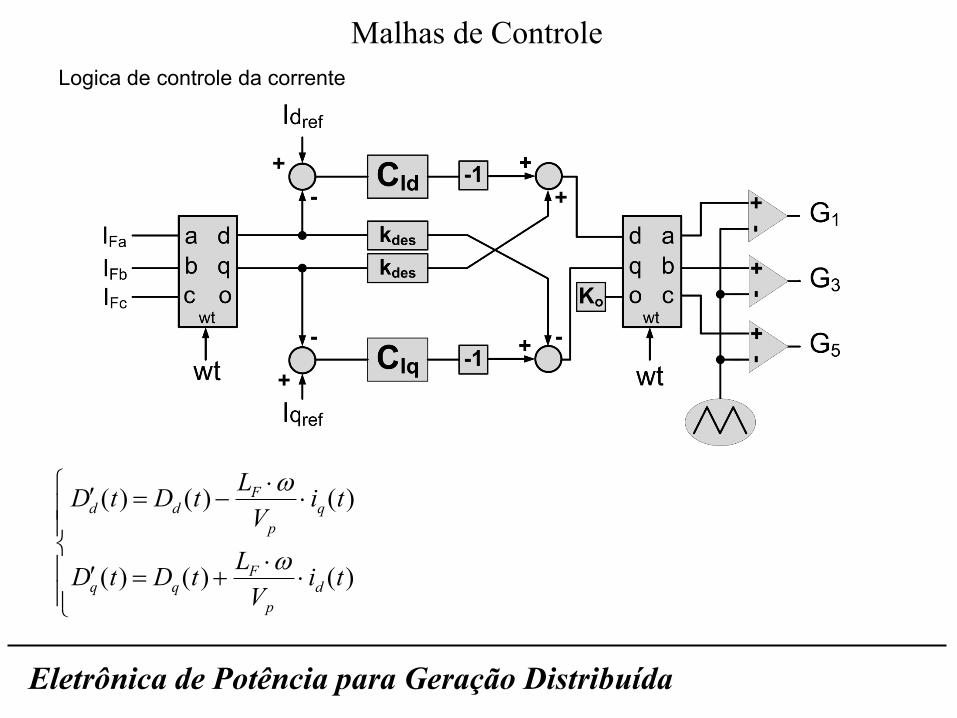
Logica de controle da corrente
( ) ( ) ( )
( ) ( ) ( )
Fd d q
p
Fq q d
p
LD t D t i t
V
LD t D t i t
V

Eletrônica de Potência para Geração Distribuída
Malhas de Controle
Logica de controle da corrente
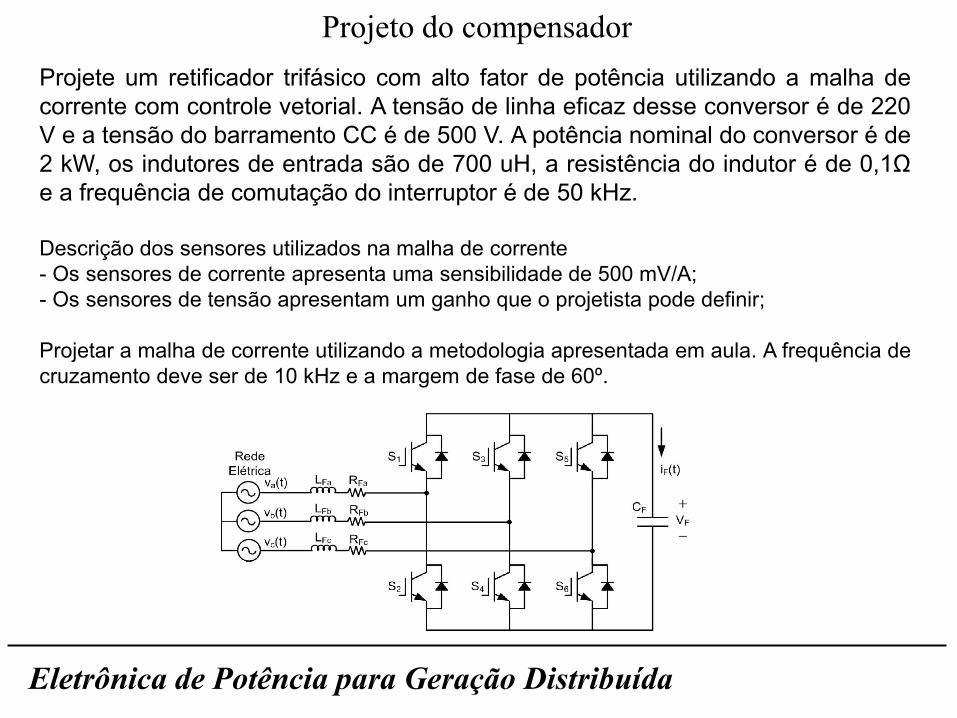
Projete um retificador trifásico com alto fator de potência utilizando a malha de
corrente com controle vetorial. A tensão de linha eficaz desse conversor é de 220
V e a tensão do barramento CC é de 500 V. A potência nominal do conversor é de
2 kW, os indutores de entrada são de 700 uH, a resistência do indutor é de 0,1Ω
e a frequência de comutação do interruptor é de 50 kHz.
Descrição dos sensores utilizados na malha de corrente
- Os sensores de corrente apresenta uma sensibilidade de 500 mV/A;
- Os sensores de tensão apresentam um ganho que o projetista pode definir;
Projetar a malha de corrente utilizando a metodologia apresentada em aula. A frequência de
cruzamento deve ser de 10 kHz e a margem de fase de 60º.
Eletrônica de Potência para Geração Distribuída
Projeto do compensador
Eletrônica de Potência para Geração Distribuída
Fazendo uma analise do conversor para pequenos sinais e aplicando a transformada de
Laplace, chega-se nas funções de transferências abaixo:
( )
( )
( )
( )
d F
d F F
q F
q F F
i s V
d s s L R
i s V
d s s L R
Projeto do compensador
Realizando o projeto do compensador no eixo direto.
( )
( )
d F
d F F
i s V
d s s L R
500
0.0007 0.1s
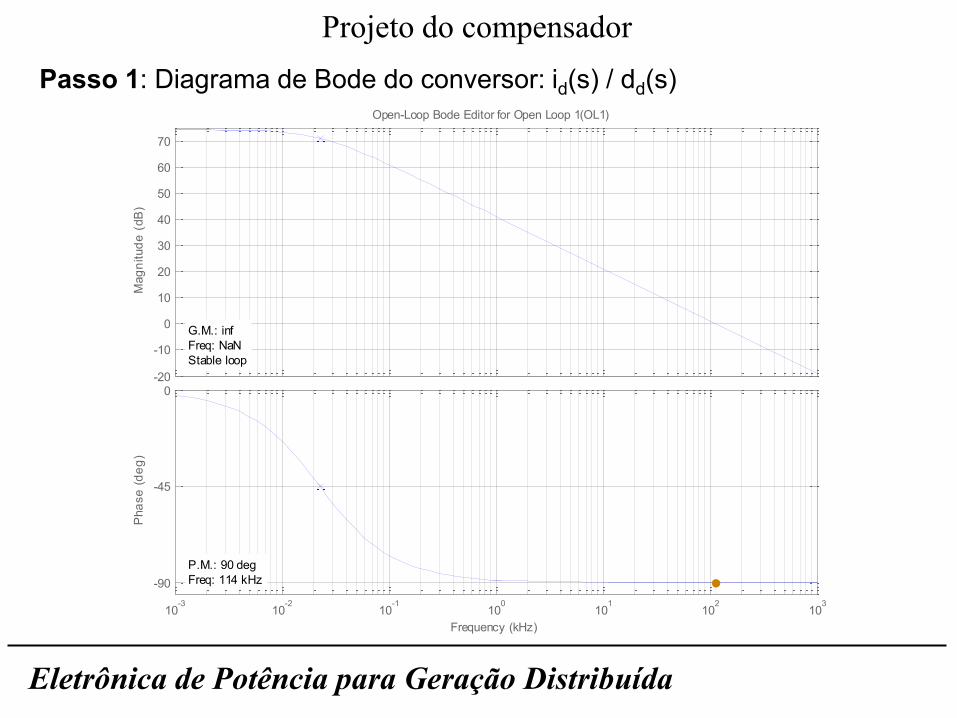
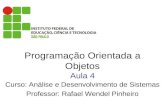
Passo 1: Diagrama de Bode do conversor: id(s) / dd(s)
Eletrônica de Potência para Geração Distribuída
Projeto do compensador
10-3
10-2
10-1
100
101
102
103
-90
-45
0
P.M.: 90 deg
Freq: 114 kHz
Frequency (kHz)
Pha
se
(d
eg
)
-20
-10
0
10
20
30
40
50
60
70
G.M.: inf
Freq: NaN
Stable loop
Open-Loop Bode Editor for Open Loop 1(OL1)
Mag
nitud
e (
dB
)
Passo 2: Escolher a frequência de corte em malha fechada desejada.
Quanto maior está frequência, melhor a resposta dinâmica do
sistema. No entanto, para evitar os efeitos do chaveamento sobre o sinal
de controle, tal frequência deve ser inferior a 1/5 da frequência de
chaveamento dos circuito de potência.
fc = 10kHz;
Eletrônica de Potência para Geração Distribuída
Projeto do compensador
10-3
10-2
10-1
100
101
102
103
-90
-45
0
P.M.: 90 deg
Freq: 114 kHz
Frequency (kHz)
Pha
se
(d
eg
)-20
-10
0
10
20
30
40
50
60
70
G.M.: inf
Freq: NaN
Stable loop
Open-Loop Bode Editor for Open Loop 1(OL1)
Mag
nitud
e (
dB
)
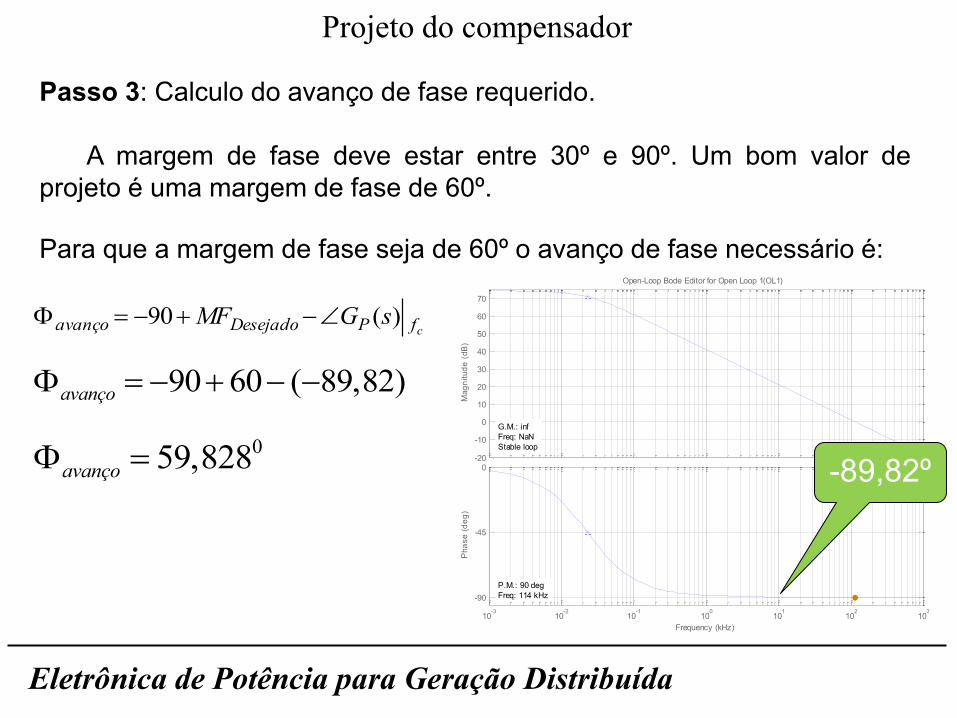
Passo 3: Calculo do avanço de fase requerido.
A margem de fase deve estar entre 30º e 90º. Um bom valor de
projeto é uma margem de fase de 60º.
Para que a margem de fase seja de 60º o avanço de fase necessário é:
cfPDesejadoavanço sGMF )(90
90 60 ( 89,82)avanço
059,828avanço -89,82º
Eletrônica de Potência para Geração Distribuída
Projeto do compensador
Passo 4: Determinação do ganho do compensador.
Conhecida a frequência de corte e o ganho do sistema de potência
na frequência de corte (Gp(s)), o ganho do controle deve ser tal que leve,
nesta frequência, a um ganho unitário em malha fechada.
ksGsGsGsGcccc fPfPWMfCfFTMA )()()()(
1)( cf
FTMA sG
1)()()( ksGsGsGccc fPfPWMfC
Eletrônica de Potência para Geração Distribuída
Projeto do compensador
10-3
10-2
10-1
100
101
102
103
-90
-45
0
P.M.: 90 deg
Freq: 114 kHz
Frequency (kHz)
Pha
se
(d
eg
)
-20
-10
0
10
20
30
40
50
60
70
G.M.: inf
Freq: NaN
Stable loop
Open-Loop Bode Editor for Open Loop 1(OL1)
Mag
nitud
e (
dB
)
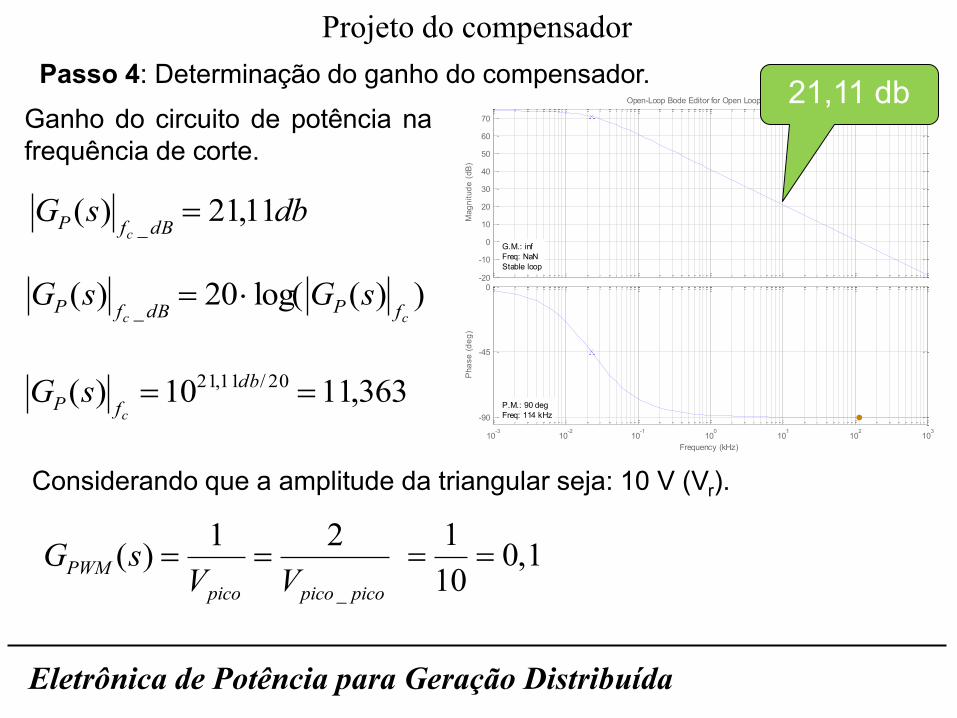
Passo 4: Determinação do ganho do compensador. 21,11 db
Ganho do circuito de potência na
frequência de corte.
Considerando que a amplitude da triangular seja: 10 V (Vr).
))(log(20)(_ cc fPdBfP sGsG
Eletrônica de Potência para Geração Distribuída
Projeto do compensador
dbsGdBfP
c
11,21)(_
363,1110)( 20/11,21 db
fPc
sG
_
1 2( )PWM
pico pico pico
G sV V
1
0,110

Passo 4: Determinação do ganho do compensador.
1)()()( ksGsGsGccc fPfPWMfC
Assim:
Eletrônica de Potência para Geração Distribuída
Projeto do compensador
( ) 0,1 11,363 0,5 1c
C fG s
( ) 1,76c
C fG s
ksGH PWM )( 0,1 0,5 0,05
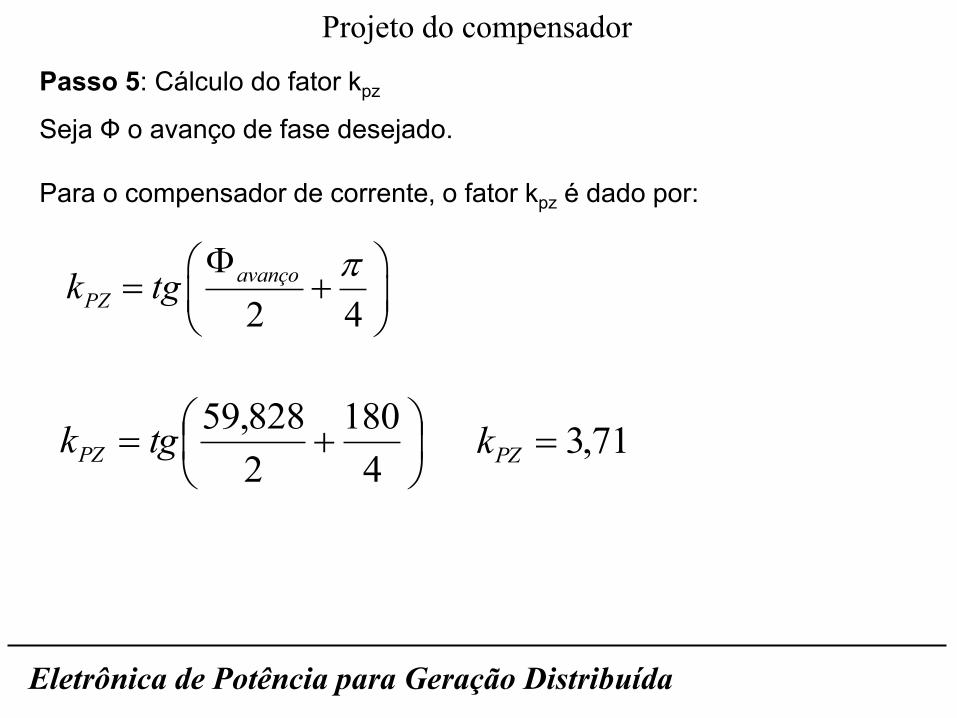
Seja Ф o avanço de fase desejado.
Para o compensador de corrente, o fator kpz é dado por:
2 4
avanço
PZk tg
Passo 5: Cálculo do fator kpz
Eletrônica de Potência para Geração Distribuída
4
180
2
828,59tgkPZ 71,3PZk
Projeto do compensador
Projeto do compensador
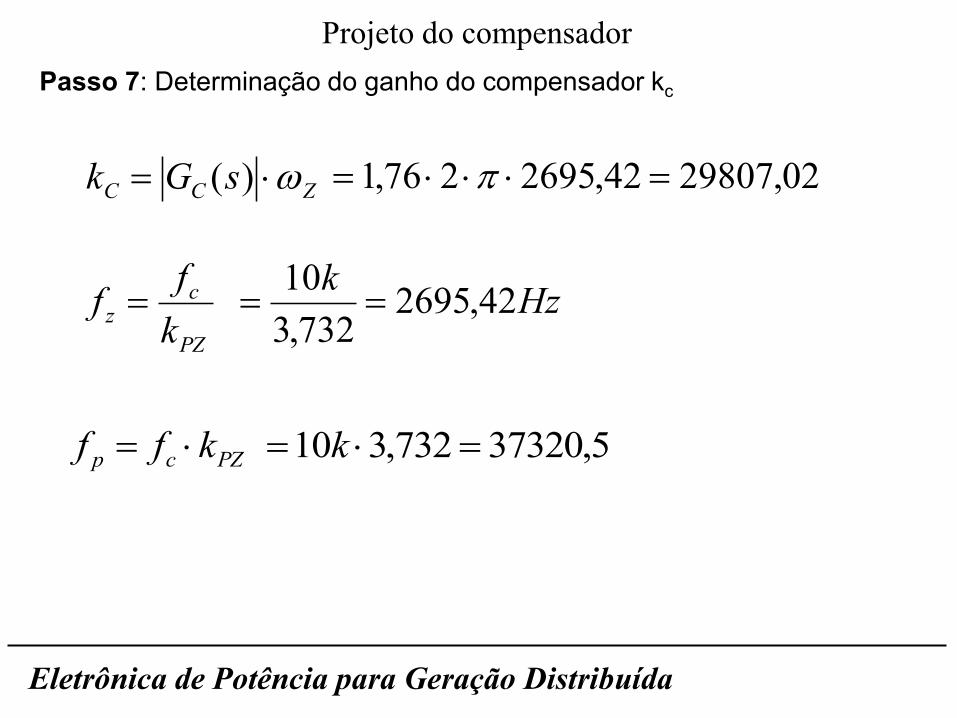
Passo 7: Determinação do ganho do compensador kc
PZ
czk
ff
Eletrônica de Potência para Geração Distribuída
PZcp kff 5,37320732,310 k
Hzk
42,2695732,3
10
ZCC sGk )( 02,2980742,2695276,1

Determinação da função de transferência do compensador.
1
( )
1
zcC
p
s
wkC s
s s
w
Projeto do compensador
5,3732021
42,269521
02,29807
s
s
s
ss
ssCC
2610265,4
02,2980776,1)(
Eletrônica de Potência para Geração Distribuída
Eletrônica de Potência para Geração Distribuída
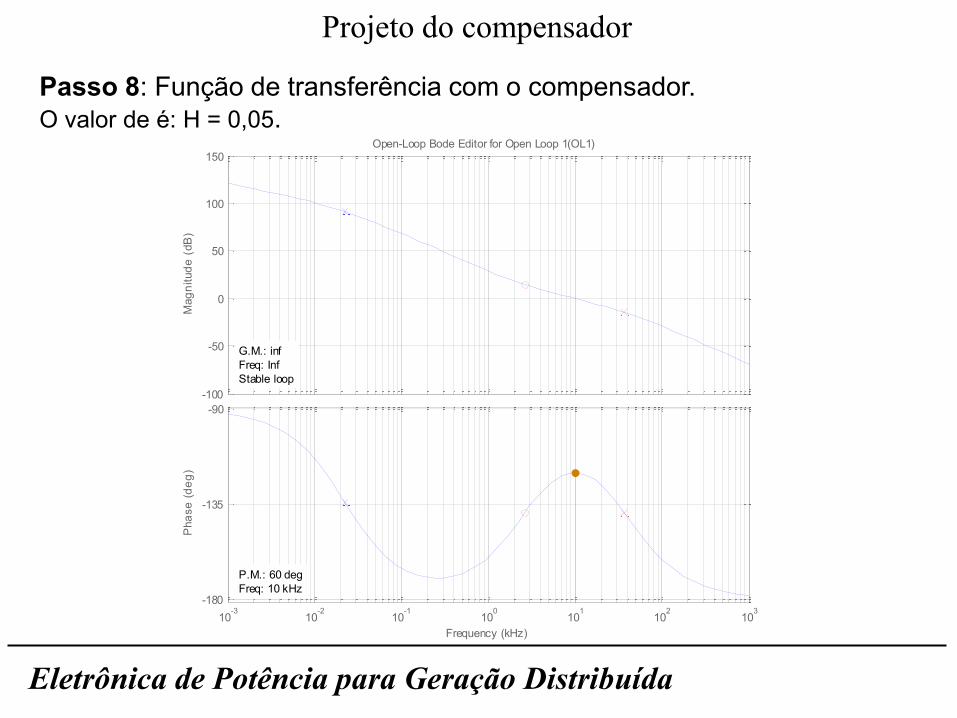
Passo 8: Função de transferência com o compensador.
O valor de é: H = 0,05.
Projeto do compensador
10-3
10-2
10-1
100
101
102
103
-180
-135
-90
P.M.: 60 deg
Freq: 10 kHz
Frequency (kHz)
Pha
se
(d
eg
)
-100
-50
0
50
100
150
G.M.: inf
Freq: Inf
Stable loop
Open-Loop Bode Editor for Open Loop 1(OL1)
Mag
nitud
e (
dB
)
Eletrônica de Potência para Geração Distribuída
Quando o ganho do sensor de corrente (kmi) ou o valor de pico (pico-pico/2) da portadora
triangular do PWM (VT) são diferentes da unidade, o ganho do desacoplamento é dado por:
F Tdes
F mi
L VK
V k
A razão cíclica da componente de sequência zero deve ter seu valor alterado quando a
portadora triangular tiver valor diferente da unidade.
0
3( )
2TD t V
Projeto do compensador
005278,05,0
10
500
60210700 6
66,8102
3