METODOLOGIA DE SINTONIA PID MULTI-MALHA PARA …palhares/cba2012-1.pdf · neira: na Se¸cao 2 sera...
8
358 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. ISBN: 978-85-8001-069-5 METODOLOGIA DE SINTONIA PID MULTI-MALHA PARA VE ´ ICULOS A ´ EREOS N ˜ AO TRIPULADOS: DIN ˆ AMICA LONGITUDINAL Gon¸ calo D. Thums ∗ , Leonardo A. B. Torres † , Reinaldo M. Palhares † ∗ ProgramadeP´os-gradua¸c˜aoemEngenhariaEl´ etrica, Universidade Federal de Minas Gerais, Av. Antonio Carlos 6627, 31270-010 Belo Horizonte, MG, Brasil † Departamento de Engenharia Eletrˆ onica, Universidade Federal de Minas Gerais, Av. Antonio Carlos 6627, 31270-010 Belo Horizonte, MG, Brasil Emails: [email protected], [email protected], [email protected] Abstract— This paper presents a methodology for tuning PID controllers for multi-loop processes considering parametric uncertainties. The main objective is to design controllers to Unmanned Aerial Vehicles (UAVs) for which cascade PID controllers are currently widely used, despite the fact that there is a lack of systematic and consistent control gains tuning procedures, even for commercial products. In the developed methodology, the optimal gains for the PID controllers are obtained via a genetic algorithm by minimizing properly chosen cost functions that incorporate local linear robust stability, together with performance evaluation considering the nonlinear system model. Simulated results indicate the effectiveness of the proposed methodology. Keywords— UAVs; PID Controllers; Multi-loop Systems; Genetics Algorithms; D-stability. Resumo— Este artigo apresenta uma metodologia para a sintonia de controladores PID para processos multi- malha considerando as incertezas param´ etricas do modelo obtido. O foco do trabalho ´ e na sintonia de controlado- res para Ve´ ıculos A´ ereos N˜ ao Tripulados (VANTs), para os quais controladores PID em cascata s˜ ao amplamente utilizados, apesar da aparente falta de procedimentos sistem´aticos e consistentes de sintonia, mesmo em produtos comerciais. Na metodologia desenvolvida, os melhores ganhos para os controladores PID s˜ao obtidos por meio de um algoritmo gen´ etico com fun¸c˜oes de custo adequadamente escolhidas, tais que s˜ao incorporados estabilidade linear local robusta, al´ em de avalia¸c˜ao de desempenho considerando o modelo n˜ao linear do sistema. Resultados desimula¸c˜ ao indicam a efic´acia da metodologia proposta. Palavras-chave— VANTs; Controladores PIDs; Sistemas multi-malha; Algoritmo Gen´ etico; D-estabilidade. 1 Introdu¸c˜ ao Em sistemas de controle comerciais de uso ge- ral para Ve´ ıculos A´ ereos N˜ ao Tripulados – VANT, tamb´ em conhecidos como Unmanned Aerial Ve- hicles – UAV, ´ e comum encontrar-se controlado- res PID utilizados para aumento de estabilidade (Stability Augmentation System – SAS), melhoria de desempenho para certas manobras do ve´ ıculo (Control Augmentation System– CAS), e funcio- nalidades de Piloto Autom´ atico (Autopilot ). Nes- ses casos os controladores PID tˆ em sido utiliza- dos em configura¸ c˜ oes multi-malha e em cascata, de forma a se tentar estabelecer rela¸c˜ oes desejadas em malha fechada para certos pares de vari´ aveis, em princ´ ıpio ignorando-se os muitos acoplamen- tos que de fato existem entre as malhas (Chao et al., 2007). Nos sistemas comerciais pesquisa- dos; e.g. (MicroPilot, 2012), (Technologies, 2012) e (Technology, 2012); os m´ etodos de sintonia dos controladores PID, em alguns casos, baseiam-se na utiliza¸ c˜ ao de valores iniciais dos ganhos PID para que o usu´ ario, com a aeronave em voo, modifi- que estes ganhos at´ e que se obtenha uma resposta em malha fechada satisfat´ oria, de forma iterativa. Em outros casos o usu´ ario pode inserir o modelo de sua aeronave em um simulador e tentar ajustar os ganhos, tamb´ em de forma iterativa. Tais estra- t´ egias geralmente implicam em um grande gasto de tempo para a sintonia das malhas PID, com risco de se obter valores que n˜ ao garantem estabi- lidade e desempenho para o sistema real. Embora os controladores PID j´ a confiram al- gumas caracter´ ısticas de robustez ` a malha fechada na presen¸ca de incertezas no modelo do processo e perturba¸ c˜ oes existentes, h´ a um grande esfor¸co no meio acadˆ emico para integra¸c˜ ao da Teoria de Controle Robusto e algoritmos de otimiza¸ c˜ ao no projeto de controladores PID, objetivando garan- tias formais de robustez (Hwang and Hsiao, 2002), (Gon¸ calves et al., 2008) e (Zhao et al., 2011). Em rela¸ c˜ ao ao problema de projeto de contro- ladores para VANT, em (Bennett, 2009) os ajus- tes dos ganhos dos controladores PIDs s˜ ao reali- zados por meio de um algoritmo de otimiza¸ c˜ ao, mas ´ e necess´ ario que a aeronave esteja em voo para que seja ajustada uma malha por vez. O tempo gasto para ajuste de cada malha foi des- crito como sendo de aproximadamente 20 minutos. Logo, o processo de sintonia de parˆ ametros demo- raria v´ arias horas e n˜ ao se consideraria, no ajuste dos parˆ ametros, o acoplamento entre as malhas. Em (Santosor et al., 2008), a partir de um mo- delo matem´ atico de uma aeronave, utiliza-se o m´ e- todo do lugar das ra´ ızes (Dorf and Bishop, 2008) para o sintonia das malhas PID. Mas, tamb´ em, o ajuste ´ e realizado malha por malha, sem conside- rar o acoplamento entre as malhas. Em (Paw and Balas, 2011) ´ e proposto o projeto de controladores robustos para um mini VANT, considerando incer-
Transcript of METODOLOGIA DE SINTONIA PID MULTI-MALHA PARA …palhares/cba2012-1.pdf · neira: na Se¸cao 2 sera...

358
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
METODOLOGIA DE SINTONIA PID MULTI-MALHA PARA VEICULOS AEREOSNAO TRIPULADOS: DINAMICA LONGITUDINAL
Goncalo D. Thums∗, Leonardo A. B. Torres†, Reinaldo M. Palhares†
∗Programa de Pos-graduacao em Engenharia Eletrica, Universidade Federal de Minas Gerais,Av. Antonio Carlos 6627, 31270-010 Belo Horizonte, MG, Brasil
†Departamento de Engenharia Eletronica, Universidade Federal de Minas Gerais,Av. Antonio Carlos 6627, 31270-010 Belo Horizonte, MG, Brasil
Emails: [email protected], [email protected], [email protected]
Abstract— This paper presents a methodology for tuning PID controllers for multi-loop processes considering
parametric uncertainties. The main objective is to design controllers to Unmanned Aerial Vehicles (UAVs) for
which cascade PID controllers are currently widely used, despite the fact that there is a lack of systematic and
consistent control gains tuning procedures, even for commercial products. In the developed methodology, the
optimal gains for the PID controllers are obtained via a genetic algorithm by minimizing properly chosen cost
functions that incorporate local linear robust stability, together with performance evaluation considering the
nonlinear system model. Simulated results indicate the effectiveness of the proposed methodology.
Keywords— UAVs; PID Controllers; Multi-loop Systems; Genetics Algorithms; D-stability.
Resumo— Este artigo apresenta uma metodologia para a sintonia de controladores PID para processos multi-
malha considerando as incertezas parametricas do modelo obtido. O foco do trabalho e na sintonia de controlado-
res para Veıculos Aereos Nao Tripulados (VANTs), para os quais controladores PID em cascata sao amplamente
utilizados, apesar da aparente falta de procedimentos sistematicos e consistentes de sintonia, mesmo em produtos
comerciais. Na metodologia desenvolvida, os melhores ganhos para os controladores PID sao obtidos por meio de
um algoritmo genetico com funcoes de custo adequadamente escolhidas, tais que sao incorporados estabilidade
linear local robusta, alem de avaliacao de desempenho considerando o modelo nao linear do sistema. Resultados
de simulacao indicam a eficacia da metodologia proposta.
Palavras-chave— VANTs; Controladores PIDs; Sistemas multi-malha; Algoritmo Genetico; D-estabilidade.
1 Introducao
Em sistemas de controle comerciais de uso ge-ral para Veıculos Aereos Nao Tripulados – VANT,tambem conhecidos como Unmanned Aerial Ve-hicles – UAV, e comum encontrar-se controlado-res PID utilizados para aumento de estabilidade(Stability Augmentation System – SAS), melhoriade desempenho para certas manobras do veıculo(Control Augmentation System– CAS), e funcio-nalidades de Piloto Automatico (Autopilot). Nes-ses casos os controladores PID tem sido utiliza-dos em configuracoes multi-malha e em cascata,de forma a se tentar estabelecer relacoes desejadasem malha fechada para certos pares de variaveis,em princıpio ignorando-se os muitos acoplamen-tos que de fato existem entre as malhas (Chaoet al., 2007). Nos sistemas comerciais pesquisa-dos; e.g. (MicroPilot, 2012), (Technologies, 2012)e (Technology, 2012); os metodos de sintonia doscontroladores PID, em alguns casos, baseiam-se nautilizacao de valores iniciais dos ganhos PID paraque o usuario, com a aeronave em voo, modifi-que estes ganhos ate que se obtenha uma respostaem malha fechada satisfatoria, de forma iterativa.Em outros casos o usuario pode inserir o modelode sua aeronave em um simulador e tentar ajustaros ganhos, tambem de forma iterativa. Tais estra-tegias geralmente implicam em um grande gastode tempo para a sintonia das malhas PID, com
risco de se obter valores que nao garantem estabi-lidade e desempenho para o sistema real.
Embora os controladores PID ja confiram al-gumas caracterısticas de robustez a malha fechadana presenca de incertezas no modelo do processoe perturbacoes existentes, ha um grande esforcono meio academico para integracao da Teoria deControle Robusto e algoritmos de otimizacao noprojeto de controladores PID, objetivando garan-tias formais de robustez (Hwang and Hsiao, 2002),(Goncalves et al., 2008) e (Zhao et al., 2011).
Em relacao ao problema de projeto de contro-ladores para VANT, em (Bennett, 2009) os ajus-tes dos ganhos dos controladores PIDs sao reali-zados por meio de um algoritmo de otimizacao,mas e necessario que a aeronave esteja em voopara que seja ajustada uma malha por vez. Otempo gasto para ajuste de cada malha foi des-crito como sendo de aproximadamente 20 minutos.Logo, o processo de sintonia de parametros demo-raria varias horas e nao se consideraria, no ajustedos parametros, o acoplamento entre as malhas.Em (Santosor et al., 2008), a partir de um mo-delo matematico de uma aeronave, utiliza-se o me-todo do lugar das raızes (Dorf and Bishop, 2008)para o sintonia das malhas PID. Mas, tambem, oajuste e realizado malha por malha, sem conside-rar o acoplamento entre as malhas. Em (Paw andBalas, 2011) e proposto o projeto de controladoresrobustos para um mini VANT, considerando incer-

359
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
tezas no modelo da dinamica latero-direcional doveıculo. Porem, o foco do trabalho e o projeto decontroladores atraves de µ-sıntese e DK-iteracao,e como consequencia o controlador obtido possuiordem dinamica maior do que a ordem do modelodo VANT, tornando difıcil a adaptacao do pro-cedimento para o problema especıfico de sintoniamulti-malha PID.
O principal objetivo desse trabalho e a pro-posicao de um procedimento sistematico para seobter os parametros dos controladores PID uti-lizados nas malhas de controle para VANT, nasconfiguracoes multi-malha e em cascata, com ga-rantia de satisfacao de criterios pre-estabelecidosde desempenho e estabilidade linear local robustaa incertezas no modelo do veıculo. E importantenotar que a busca pelos parametros otimos doscontroladores PID, obedecendo a condicoes pre-especificadas de estabilidade e desempenho robus-tos, e na maioria dos casos um problema nao-convexo, de forma que metodos evolucionarios temsido utilizados em varios trabalhos para se tentarresolver os problemas de otimizacao corresponden-tes obtidos na analise e sıntese dos controlado-res (Chen et al., 1995), (Chen and Cheng, 1998),(Jang Ho and Shu, 2004) e (Zhao et al., 2011).
Este artigo esta organizado da seguinte ma-neira: na Secao 2 sera formalizado o problema desintonia de controladores PID para VANT, em to-pologias multi-malha e em cascata, considerandoa dinamica longitudinal do veıculo. Na Secao 3a metodologia proposta neste trabalho sera deta-lhada, enfatizando as hipoteses e tecnicas adota-das em sua implementacao. Um exemplo de sinto-nia PID multi-malha para um VANT desenvolvidona UFMG sera apresentado na Secao 6, junta-mente com alguns resultados de simulacao de voodo veıculo. Finalmente, na Secao 7 consideracoesfinais e conclusoes sobre a metodologia propostaserao registrados.
2 Visao Geral do Problema
A topologia de controladores PID consideradaneste trabalho e a mesma utilizada no sistema co-mercial Micropilot (MicroPilot, 2012), conformeestrutura mostrada na Fig. 1. As malha de con-trole de altitude h e angulo de arfagem θ sao colo-cadas em cascata para melhor desempenho dina-mico da aeronave. A malha interna θ e responsa-vel pela estabilizacao da aeronave atraves de co-mandos uelev realizados no profundor, enquanto amalha de velocidade e controlada atraves das va-riacoes dos comandos de potencia uthr aplicadosao motor. O ganho de acao direta (feedforward)KF antecipa um aumento ou diminuicao de poten-cia no motor em funcao do erro no rastreamentoda altitude desejada href (Iscold et al., 2010). Aprincipal dificuldade em se obter um ajuste ade-quado das malhas PID mostradas na Fig. 1 e o
Aeronave
PID
PID
PID
KF
uelev
uthr
h
θ
VT
+
++
+
+--
-
href θref
VTref
Figura 1: Topologia de controladores PID para a di-namica longitudinal de VANTs.
forte acoplamento entre as variaveis h e VT . Nessecontexto, uma metodologia de sintonia automa-tica visa reduzir significativamente ou eliminar onumero de iteracoes para ajuste dos ganhos PID,que geralmente sao feitas por meio de ensaios emvoo. Em contrapartida, faz-se necessario conhe-cer um modelo da aeronave em conjunto com asespecificacoes de limites para as incertezas para-metricas associadas a esse modelo. Como formade alcancar o objetivo principal da metodologiade sintonia dos ganhos PID, buscou-se garantir aestabilidade robusta linear local da malha fechadado sistema (Secao 3.3). Alem disso, considerandorespostas em malha fechada a degraus nos sinaisde referencia, e com base nas evolucoes das varia-veis angulo de arfagem θ, velocidade da aeronaveem relacao a atmosfera VT e altitude h, definiu-se parametros mınimos de desempenho a serematendidos como resultado da simulacao do modelonao-linear da aeronave em malha fechada (Secao3.4). Para resolver o problema especıfico de sin-tonia multi-malha PID para controle longitudinalde um VANT, duas etapas sao necessarias. Naprimeira etapa, representada na Fig. 1 pelos ele-mentos que estao dentro dos limites da linha tra-cejada, sao determinados os ganhos das malhasPID relativas a θ e VT (Secao 4). Em seguida ocontrolador PID da malha de altitude, bem comoo ajuste do ganho KF , sao realizados (Secao 5).
2.1 Modelo da Dinamica Longitudinal
O movimento longitudinal realizado pela ae-ronave pode ser descrito pelas seguintes equacoes(Iscold et al., 2004):
h = VZ ;
θ = q;
˙VX =1
m
L sin η −D cos η + LT sin γ + FT cos θ
;
VZ =1
m
− L cos η −D sin η − LT cos γ
− FT sin θ + P
;
q =1
J
M + L lA cosα− LT lT cosαT
; (1)

360
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
em que: h e a altitude de voo; θ e o angulo de ar-fagem; α e o angulo de ataque; η e o angulo entreVX e VZ ; αT e o angulo de ataque na empena-gem horizontal; γ = αT - θ; VX e a velocidade nadirecao horizontal; VZ e a velocidade na direcaovertical; q e a taxa de variacao de θ; J e o mo-mento de inercia em torno do eixo longitudinal;m e a massa total; lA e a distancia entre o centroaerodinamico e o c.g. (centro de gravidade); lT ea distancia entre o ponto de atuacao da forca desustentacao LT na empenagem horizontal e o c.g.;P e a forca peso. A velocidade total em relacao aatmosfera e dada por
VT =(VX)2 + (VZ)2. (2)
As forcas e os momentos aerodinamicos saodeterminados por:
L = 12ρS(CL0 + CLα)V 2
T,
D = 12ρSCDαV
2T,
M = 12ρSc(CM0 + CMα)V 2
T,
LT = 12ρST (CLEHα + CLδelev
)V 2RT
,
(3)
sendo ρ a densidade do ar, que varia com a alti-tude de acordo com o modelo de Atmosfera Pa-drao (Stevens and Lewis, 2003); S a area totalde superfıcie da asa; ST e VRT sao area e a veloci-dade relativa do estabilizador horizontal da cauda,respectivamente; c e a corda media da asa. Oscoeficientes aerodinamicos CLα, CL0, CDα, CMα,CM0, CLEHα CLδelev
sao adimensionais, sendo queo valor de CLδelev
e determinado pela entrada decontrole uelev. A forca de propulsao FT e dadapor:
FT = ρCT (VT ,uthr)Ω(VT ,uthr)2D4P; (4)
em que CT e o coeficiente de tracao; Ω e velocidadede rotacao da helice conectada ao motor; uthr euma variavel de controle da potencia do motor,com valor mınimo de 0 e maximo de 1; e DP e odiametro da helice.
As equacoes (1) a (4) foram usadas em um di-agrama de simulacao MATLAB/Simulink repre-sentando o modelo nao-linear da dinamica de vooda aeronave. A partir desse diagrama, o modelolinear local do sistema foi obtido em duas etapas,a saber: i) determinacao numerica da condicaode equilıbrio; ii) calculo numerico das matrizes A,B, C e D da representacao em espaco de estados,por meio de aproximacoes por diferencas finitaspara as correspondentes derivadas parciais. Emi) define-se os valores desejados de equilıbrio heq eVTeq
para as variaveis h e VT ; obtendo-se por meiode um algoritmo de otimizacao os demais valoresde θeq, VXeq
, VZeq, qeq, ueleveq
, e uthreq .
2.2 Descricao e Representacao de Incertezas
Os modelos incertos sao obtidos a partir de va-riacoes em torno dos valores nominais dos parame-tros CLα, CL0, CDα, CMα, CM0, CLEHα CLδelev
,
CT , usados em (3). As variacoes sao realizadas demaneira estocastica, seguindo distribuicoes unifor-mes com limites determinados de acordo com aTabela 1.
Tabela 1: Percentuais maximos e mınimos considera-dos para as incertezas parametricas.
CLα CL0 CDα CMα CM0
+2 +10 +10 +2 +2-2 -10 -2 -2 -2
CLEHα CLδelevCT Ω
+10 +4 +15 +10-10 -4 -15 -10
Para cada conjunto de variacoes sorteado, ummodelo do sistema e obtido apos serem realizadasas etapas i) e ii) descritas ao final da Secao 2.1.Desta maneira sao obtidos modelos lineares locais,representados por matrizes Ai, Bi, Ci e Di, com1 ≤ i ≤ N ; em que N e o numero de modelosutilizados posteriormente para representar os ver-tices do politopo correspondente ao modelo linearlocal incerto do sistema (Secao 3.3).
Salienta-se que a abordagem mais utilizadapara projeto de controladores incorporando in-certezas parametricas parece ser a tecnica base-ada nos conceitos de Valor Singular Estruturadoµ e de Transformacao Linear Fraccional (LFT)(Skogestad and Postlethwaite, 2007). Porem, emtestes preliminares essa abordagem mostrou-semuito conservadora. Isto e, percentuais peque-nos de incertezas nos parametros do modelo vi-olaram a restricao de estabilidade robusta linearlocal para quaisquer ganhos das malhas PID es-colhidos. Diante dessa limitacao, essa abordagemfoi abandonada e utilizou-se a representacao po-litopica de incertezas no domınio do tempo paraverificar a estabilidade robusta do sistema, sendoo politopo formado pelos vertices:
ACLi =
(Ai −BiDcCi) BiCc
−BcCi Ac
, (5)
em que 0 ≤ i ≤ N , sendo que i = 0 representao modelo nominal; ACLi sao as matrizes dinami-cas de malha fechada; e as matrizes Ac, Bc, Cc eDc sao representacoes em espaco de estados dosconjuntos controladores PID utilizados. O pro-cedimento de verificacao da estabilidade robustasera melhor detalhado na Secao 3.3.
2.3 Estrutura do controlador PID
A Funcao de Transferencia de um controladorPID pode ser dada por (Astrom and Hagglund,2006):
U(s)
E(s)= Kc
1 +
1
Tis+
Tds
ρTds+ 1
, (6)

361
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
com uma possıvel representacao em espaco de es-tados dada por
APID BPID
CPID DPID
=
0 0 Kc
Ti
0 −1
ρTd
Kcρ2Td
1 −1 Kc(1 +1ρ)
,
(7)em que Kc e o ganho proporcional, Ti e o tempointegral, e Td e o tempo derivativo. Utiliza-se otermo ρ para limitar a acao derivativa em altasfrequencias, e nesse trabalho escolheu-se ρ = 0,1.Entretanto, salienta-se que em casos praticos ou-tras estruturas sao adicionadas a estrutura PIDbasica, como mostrado na Fig. 2, onde foram in-cluıdos os efeitos de saturacao e de limitacao dataxa maxima de variacao da acao de controle. Aexistencia de saturacao conduz a necessidade deimplementacao de uma estrategia anti-windup nodiagrama de simulacao do modelo nao-linear dosistema, a qual consistiu, no presente trabalho, emse paralizar o processo de integracao do erro sem-pre que os limites de saturacao foram atingidos.
1Tis
1/ρρTds+1
Kc
E(s) U(s)
+
+
+x1(s)
x2(s)-
1ρ
atuador1
+
Figura 2: Estrutura de um controlador PID utilizadoem aplicacoes reais.
3 Metodologia de Sintonia PIDMulti-malha
A metodologia proposta e baseada na utiliza-cao de um algoritmo genetico para a busca dosganhos dos controladores PID. Para tanto, deve-se obter os modelos lineares locais em torno dascondicoes de voo (Secoes 2.1 e 2.2), de forma queas novas condicoes de equilıbrio sao obtidas paracada modelo perturbado, mantendo-se inalteradossomente os valores de velocidade e altitude de re-ferencia. Apos a execucao dessa etapa, o algo-ritmo genetico e inicializado com a geracao de umapopulacao inicial de npop indivıduos (Secao 3.2).Os indivıduos representam o conjunto de ganhosPID das malhas que se deseja sintonizar, e cadaum deles e avaliado em relacao a estabilidade ro-busta linear local da malha fechada do sistema(Secao 3.3). Se confirmada esta estabilidade ro-busta local, as funcoes de custo sao avaliadas emconjunto com os criterios de desempenho para o
kger = 1kpop = 0
Determinacao das
faixas dos ganhos PID
Inicializacao
NSGA-II
kpop = kpop + 1
nao
Obtem ganhos
PID individuo
kpop < npop ?
Localmente robus-
mente estavel?
Avaliacoes das
funcoes de custos
sim
kger = kger + 1
sim
nao
kpop = 0
nao
Criterio de parada:
kger > nger?
Selecao, cruzamento
e mutacao individuos
sim
Criterio escolha
conjunto PID
Desempenho minimo
foi obtido ?
Individuo mantido
na populacao
sim
nao
Obter modelos
lineares locais
Figura 3: Fluxograma das etapas do algoritmo de sin-tonia multi-malha PID.
sistema nao-linear em malha fechada (Secao 3.4).O individuo e armazenado como sendo uma so-lucao valida somente se os criterios mınimos dedesempenho forem alcancados. A cada nova ge-racao formada, os operadores de cruzamento, se-lecao e mutacao sao aplicados aos indivıduos dapopulacao. O criterio de parada do algoritmo ge-netico e alcancar a ultima geracao de evolucao dapopulacao nger. Como e utilizado um algoritmode otimizacao para busca dos ganhos dos contro-ladores PID, e necessario a determinacao de umafaixa adequada de valores para cada termo ondesera realizada esta busca (Secao 3.1). As etapasenvolvidas na determinacao dos ganhos PID dosistema estao representadas no fluxograma da Fig.3. O procedimento e executado duas vezes: umavez para as malhas mais internas de θ e VT (Secao4), e outra vez para a malha mais externa de h
(Secao 5), vide Fig.1.
3.1 Determinacao das Faixas de Busca
Foram definidas algumas regras simples paraa determinacao das faixas de busca dos parame-

362
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
tros dos controladores PID. Para o ganho pro-porcional, definiu-se que o valor maximo e deKcmax
= 10umax
emax, sendo que umax e o valor ma-
ximo permitido para a acao de controle e emax eerro maximo na malha de controle. Para o tempode integracao, definiu-se que o valor maximo e deTimax
= 1min(R(λ)) , em que λ representa os auto-
valores da matriz dinamica de malha aberta dosistema. Para o tempo derivativo, definiu-se queo valor maximo e de Tdmax
= 0,1min(R(λ)) . Para o
ganho KF , definiu-se que o valor maximo e deKFmax
= Kcmax
10 . Foi considerado que o valor mı-nimo de cada faixa e igual a zero.
3.2 Algoritmo de otimizacao NSGA-II
Os autores acreditam que a escolha do tipo dealgoritmo evolucionario nao influencia significati-vamente a qualidade dos resultados finais obtidos,ja que todos possuem caracterısticas estocasticasde busca do otimo global. Alem disso, nao ha res-tricao de tempo de execucao do codigo, uma vezque o procedimento e offline. Para este trabalhofoi escolhido o algoritmo NSGA-II. As implemen-tacoes dos algoritmos geneticos sao baseadas nosmecanismos de evolucao das especies que ocorrematraves das realizacoes de reproducoes, cruzamen-tos e mutacoes nos genes dos indivıduos ao longode geracoes. Uma solucao e gerada aleatoriamentepara cada individuo no inıcio do procedimento deotimizacao, e ao final, os valores sao modificadosde forma a se obter melhores indivıduo na popu-lacao, selecionados de acordo com as funcoes decustos avaliadas (Deb, 2001). As principais carac-terısticas do NSGA-II utilizado neste trabalho sao:codificacao real, elitismo e espalhamento uniformedas solucoes. Os parametros definidos para o al-goritmo genetico foram: probabilidade de ocorrermutacao pm = 0,1, e cruzamento pc = 0,9.
3.3 Dinamica Linear Local – Analise de Estabi-lidade Robusta
A verificacao da estabilidade robusta linearlocal foi realizada atraves da analise de D-estabilidade. Esta refere-se a verificacao de estabi-lidade robusta no sentido de se testar as possıveislocalizacoes de autovalores, considerando incerte-zas politopicas, em uma sub-regiao pre-definidado semi-plano esquerdo aberto do plano complexo(Peaucelle et al., 2000). Define-se P como sendoo subespaco definido pelo politopo formado portodas as combinacoes convexas entre os verticesACLi , definidos em (5). Desta forma, tem-se que:
P ACL ∈ Rn×n : ACL =
N
i=0
αiACLi ,
N
i=0
αi = 1,αi ≥ 0, ∀i
, (8)
em que n e a quantidade de estados do sistema emmalha fechada, e N e quantidade de modelos in-certos. O algoritmo utilizado para a analise de D-estabilidade do sistema e o descrito em (Goncalveset al., 2006). Nesse algoritmo e utilizado o Teo-rema 4 apresentado em (Peaucelle et al., 2000),no qual utilizam-se Desigualdades Matriciais Li-neares (Linear Matrix Inequalities – LMIs), parase verificar se o politopo P e D-estavel. Caso naoseja, o politopo P e subdividido iterativamente ateque todos os sub-politopos gerados sejam robus-tamente D-estaveis, ou e encontrada uma instan-cia do politopo que nao e D-estavel. Neste tra-balho, nao foi definido nenhum requisito para amalha fechada do sistema atraves da analise deD-estabilidade, de forma que a regiao-D conside-rada e todo o semi-plano esquerdo aberto do planocomplexo.
3.4 Dinamica Nao Linear – Criterios de Desem-penho
O desempenho em malha fechada do sistemaem malha fechada foi avaliado atraves da simula-cao do modelo nao-linear nominal da aeronave emconjunto com a estrutura de controladores PIDdescrita na Fig. 2. Nas simulacoes do sistemaescolheu-se condicoes iniciais adequadas para osestados internos dos controladores para evitar aocorrencia de sobressaltos transitorios antes daaplicacao de variacoes nas referencias.
Os criterios de desempenho foram definidoscomo: a) tempo de acomodacao para respostaa um degrau pre-especificado; b) sobre-elevacaopara a resposta ao degrau; e c) tempo de aco-modacao para uma pertubacao de carga pre-especificada, sendo que a pertubacao de carga eo efeito que a variacao na referencia em uma ma-lha ocasiona na outra. Os criterios de desempenhoforam escolhidos de forma que seja possıvel obtera maior velocidade de resposta em decorrencia demudancas nos valores das referencias, mantendoo erro em estado estacionario nulo, e uma sobre-elevacao moderada.
Conforme ilustrado na Fig.3, as metricas dedesempenho supracitadas devem atender a requi-sitos mınimos pre-especificados, para que o indi-vıduo controlador seja mantido na populacao.
4 Sintonia dos ganhos PID das malhas θ
e VT
Definiu-se, para este caso, duas funcoes obje-tivo:
min∆uk =M
2
∆uelev +M
2
∆uthr[k],
min ISE =M
1
eθ[k]2 +
M
1
eVT [k]2, (9)
363
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
em que ∆uelev = uelev[k] - uelev[k − 1]; ∆uthr[k]= uthr[k] - uthr[k− 1]; M e o numero de amostrasdos sinais discretos obtidos em simulacao; eθ e eVT
sao os erros nas malhas θ e VT respectivamente.Com isso, ao final da execucao do algoritmo
genetico, um conjunto de Pareto foi obtido. As-sim, pode-se escolher o conjunto de controlado-res PID atraves de algum criterio de decisao queseja mais adequado para a aplicacao realizada peloVANT.
5 Sintonia dos ganhos PID malha dealtitude e do ganho KF
Nesse caso definiu-se apenas um objetivo:
min f(k) =M
1
eh[k]t[k] +
M
1
eVT [k], (10)
em que M e quantidade de amostras dos sinaisdiscretos obtidos em simulacao; e eh e eVT saoos erros nas malhas h e VT , respectivamente.O primeiro somatorio representa o indice ITAE(Astrom and Hagglund, 2006) da malha de alti-tude, enquanto que o segundo somatorio repre-senta o erro na malha de velocidade para o ajustedo ganho KF . Ao final da execucao do algoritmogenetico, escolheu-se o indivıduo com menor valorde f(k) dentre a populacao gerada.
Um observacao importante e o fato de ser ne-cessario incluir uma acao integral no controladorde altitude, apesar de o modelo linearizado da di-namica de altitude possuir uma acao integrativanatural. A acao integral adicional possibilita aestimacao indireta do valor de equilıbrio θeq = 0que conduz ao erro nulo no problema de regula-cao, i.e. no problema de manutencao da altitudeconstante.
6 Resultados de Simulacao
O tempo total de execucao do algoritmopara obtencao dos ganhos PID multi-malha paraVANTs foi de 230min em um computador Pen-tium i3, 2,1MHz, com 4Gb de memoria RAM.
O modelo de simulacao do VANT correspondea aeronave AqVS (Iscold et al., 2010), conce-bido na Universidade Federal de Minas Gerais –UFMG. Para esse modelo, a condicao de equilı-brio definida para voo nivelado e de Heq = 750me VTeq = 16m/s. As incertezas presentes nos para-metros do modelo da aeronave AqVS foram aque-las indicadas pelos percentuais maximos e mıni-mos mostrados na Tabela 1.
O procedimento de obtencao dos modelos line-ares incertos, descrito na secao 2.2, foi realizadoescolhendo-se N = 128 modelos. Porem, nao segarante que todas as combinacoes possıveis en-tre os limites das incertezas estarao presentes naobtencao desses modelos incertos. O motivo da
nao utilizacao de um numero maior de modelosincertos foi o aumento do custo computacional,ao mesmo tempo em que se verificou resultadossemelhantes ao final do procedimento para variasrealizacoes. Na Tabela 2 estao os requisitos es-colhidos para os criterios de desempenho defini-dos na secao 3.4, sendo que t.a.r.d e a abreviacaode tempo de acomodacao a resposta ao degrau, et.a.p.c e a abreviacao de tempo de acomodacao apertubacao de carga.
Tabela 2: Criterios de desempenho definidos para aaeronave AqVS.
malha t.a.r.d t.a.p.c sobresinalVT ≤ 15,0s ≤ 10,0s ≤ 15,0%θ ≤ 5,0s ≤ 5,0s ≤ 15,0%h ≤ 20,0s - ≤ 15,0%
Apos a execucao do procedimento descrito nasecao 3 para as malhas θ e VT (Secao 4), em quese utilizou npop = 110 e ngen = 70 como parame-tros do algoritmo NSGA-II, foi obtido o conjuntode Pareto mostrado na Fig. 4. Para fins de ilus-tracao, adotou-se como criterio de escolha dentreos indivıduos do conjunto de Pareto aquele queapresentou a menor norma Euclidiana para o ve-tor formado pelos ındices em (9).
200 400 600 800 1000 1200 1400 1600 18003
3.5
4
4.5
5
5.5
6
6.5
7
7.5PARETO
ISE
Δ u
k
Figura 4: Pareto das Funcoes de custos dos conjuntosde ganhos PID das malhas θ e VT .
Com a definicao dos ganhos das malhas θ eVT , executou-se o procedimento descrito na secao3 para a malha h e ganho feedforward (Secao 5),usando-se npop = 40 e ngen = 25 para a otimiza-cao estocastica baseada no algoritmo NSGA-II.
Na Tabela 3 estao as faixas de busca dos ga-nhos PID para a aeronave AqVS, obtidos con-forme procedimento descrito na secao 3.1.
Na Tabela 4 estao os ganhos PID obtidos paraas malhas de controle da aeronave AqVS apos aexecucao completa do procedimento de sintonia.
Como forma de se avaliar o desempenho dosistema em malha fechada para os ganhos PID
364
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
Tabela 3: Faixa dos ganhos PID para a aeronaveAqVS.
VT θ h
Kcmin0,00 -2,70 0,00
Kcmax2,50 0,00 0,70
Timin0,00 0,00 0,00
Timax20,40 20,40 4,65
Tdmin- 0,00 0,47
Tdmax- 2,04 0,47
KFmin0,00 - -
KFmax0,25 - -
Tabela 4: Ganhos PID sintonizados para a aeronaveAqVS.
malha Kc Ti Td KF
VT 1,21 4,84 - 0,04θ -0,95 1,58 0,15 -h 0,26 1,13 0,15 -
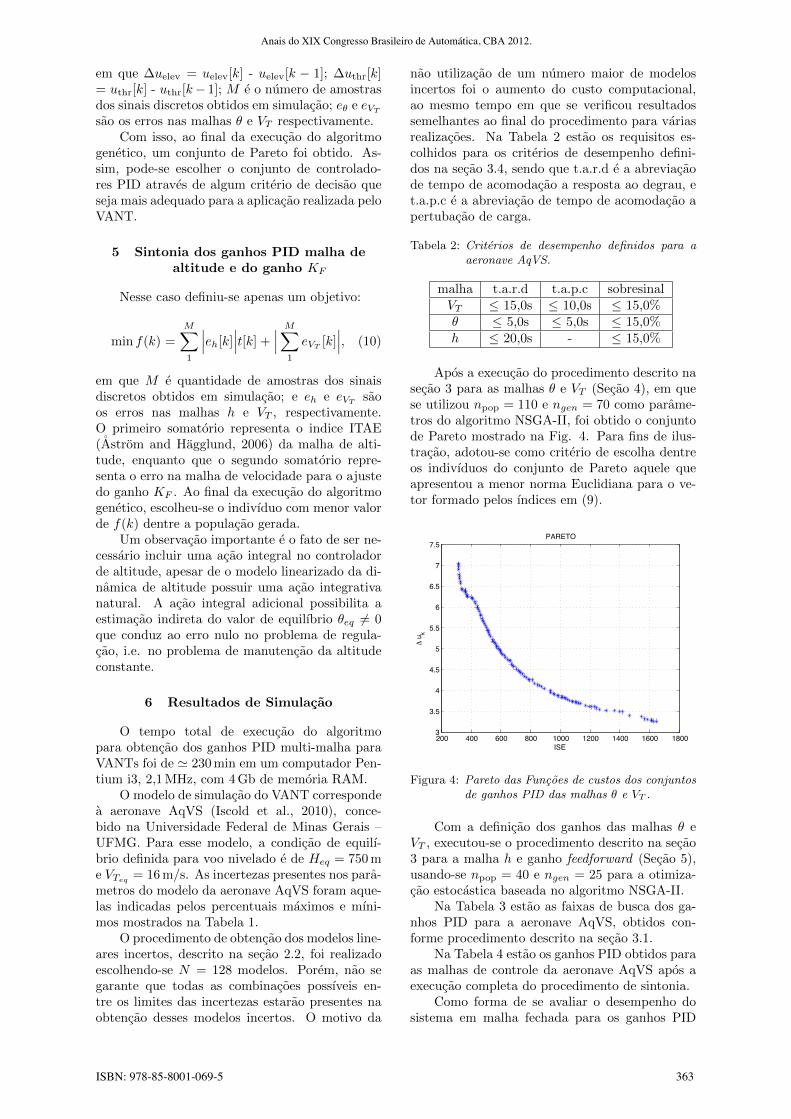
da tabela 4, foram aplicados degraus positivos enegativos em momentos distintos nas malhas dealtitude e velocidade. Na Fig. 5 sao mostradasas respostas das malhas de altitude, velocidade eangulo de arfagem, tanto para o modelo nao-linearnominal, quanto para os modelos nao-lineares comparametros perturbados.
Os desempenhos das malhas fechadas, mos-trados na Fig. 5, atenderam a todos os requisitosdefinidos na Tabela 2. Apesar de o desempenhodo sistema e as funcoes de custos serem avaliadasapenas para o modelo nominal, as respostas dasmalhas fechadas para os modelos incertos apresen-taram comportamentos semelhantes ao do modelonominal.
7 Conclusoes
Uma metodologia sistematica de sintonia paracontroladores PID multi-malha para VANTs foidesenvolvida. Atraves de um modelo da dinamicalongitudinal de uma aeronave, considerando suasincertezas parametricas, foi possıvel garantir esta-bilidade robusta linear local, e desempenho nomi-nal, para o sistema nao-linear em malha fechada.
A estabilidade robusta linear local do sistemafoi avaliada atraves da analise de D-estabilidade.Salienta-se que embora a estabilidade regional ouglobal nao tenham sido comprovadas para o sis-tema nao-linear, a estabilidade assintotica linearlocal garante a estabilidade local do sistema nao-linear em torno de seus pontos de equilıbrio.
O algoritmo genetico NSGA-II se mostrouuma ferramenta adequada para a busca do con-junto otimo dos ganhos PID para as malhas decontrole θ, VT e h. O principal benefıcio na utili-zacao de um algoritmo de otimizacao para a ava-liacao de desempenho do sistema e a possibilidade
0 20 40 60 80 100 120 140 160735
740
745
750
755
760
765
Altit
ude
(m)
tempo (s)
referênciamodelos nominal e incertos
(a) resposta da malha fechada para a variavel h - note que
ha 129 tracos contınuos acima praticamente sobrepostos.
0 20 40 60 80 100 120 140 160−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
θ (ra
d)
tempo (s)
referênciamodelos nominal e incertos
(b) resposta da malha fechada para a variavel θ - note que
ha 129 tracos contınuos acima praticamente sobrepostos.
0 20 40 60 80 100 120 140 16014.5
15
15.5
16
16.5
17
17.5
V T (m/s
)
tempo (s)
referênciamodelos nominal e incertos
(c) resposta da malha fechada para a variavel VT - note que
ha 129 tracos contınuos acima praticamente sobrepostos.
Figura 5: Respostas aos degraus realizados nas malhash e VT nos 128 modelos incertos e nominalem simulacao do modelo nao-linear da ae-ronave AqVS.
disto ser realizado de forma automatica por meioda direta simulacao do modelo nao-linear, redu-

365
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
zindo o numero de ensaios em voo. Resultadosde simulacao apresentados para os modelos nomi-nal e incertos da aeronave AqVS indicam que ametodologia desenvolvida e valida.
Os autores estao modificando o procedimentopara incluir tambem a dinamica latero-direcional.Alem disso, serao realizados testes da metodologiadesenvolvida em uma aeronave real.
Agradecimentos
Os autores agradecem ao Conselho Nacio-nal de Desenvolvimento Cientıfico e Tecnologico– CNPq pelo apoio na realizacao das pesquisasrelacionadas a este trabalho. O primeiro autoragradece a Coordenacao de Aperfeicoamento dePessoal de Ensino Superior – CAPES pelo apoiofinanceiro.
Referencias
Bennett, M. (2009). Development of technologiesfor low-cost oceanographic unmanned aero-nautical vehicles, Master’s thesis, Universityof Southampton.
Chao, H., Cao, Y. and Chen, Y. (2007). Autopi-lots for small fixed-wing unmanned air vehi-cles: A survey, International Conference onMechatronics and Automation 46(1): 3144–3149.
Chen, B. and Cheng, Y. (1998). A structure-specified H∞ optimal control design for pra-tical applications: A genetic approach, IEEETransactions on Control Systems Technology6(6): 707–718.
Chen, B., Cheng, Y. and Lee, C. (1995). Agenetic approach to mixed H2/H∞ optimalPID control., IEEE Control Systems Maga-zine 15(1): 51–60.
Deb, K. (2001). Multi-Objective Optimizationusing Evolutionary Algorithms, 1st edn, JohnWiley and Sons, LTD.
Dorf, R. C. and Bishop, R. H. (2008). ModernControl Systems, 8th edn, John Wiley andSons Ltd.
Goncalves, E. N., Palhares, R. M. and Takahashi,R. H. C. (2008). A novel approach for H2 /H∞ robust PID synthesis for uncertain sys-tems., Journal of Process Control 18(1): 19–26.
Goncalves, E. N., Palhares, R. M., Takahashi,R. H. C. and Mesquita, R. C. (2006).New approach to robust D-stability analysispolytope-bounded uncertainty., IEEE Tran-sactions on Automatic Control 51(10): 1709–1714.
Hwang, C. and Hsiao, C. (2002). A new approachto mixedH2 /H∞ optimal PI/PID controllerdesign., Industrial and Engineering Chemis-try Research 41(24): 6107–6119.
Iscold, P. H. A. O., Pereira, G. and Torres, L.(2010). Development of a hand-launchedsmall UAV for ground reconnaissance, EEETransactions on Aerospace and ElectronicSystems 46(1): 335 –348.
Iscold, P. H. A. O., Utsch, R. L. F. P. and Lima,K. N. (2004). Lei de controle para loop acro-batico Otimo, Society of Automotive Engine-ers .
Jang Ho, S. and Shu, L. (2004). Osa: Orthogonalsimulated annealing algorithm and its appli-cation to designing mixed H2 e H∞ optimalcontrollers, IEEE Transactions on Systems,Man, and Cybernetics Part A: Systems andHumans 34(5): 588–600.
MicroPilot (2012). Micropilot miniature UAV au-topilot, http://www.micropilot.com/.
Paw, Y. C. and Balas, G. J. (2011). Developmentand application of an integrated frameworkfor small uav flight control development, Me-chatronics 21(5): 789–802.
Peaucelle, D., Arzelier, D., Bachelier, O. and Ber-nussou, J. (2000). A new robust D-stabilitycondition for real convex polytopic uncer-tainty., Systems & Control Letters 40(1): 21–30.
Santosor, F., Liu, M. and Egan, G. (2008).Root locus based autopilot PIDs parameterstuning for a flying wing unmanned aerialvehicle, ITB Journal of Engineering Science40(1): 14–39.
Skogestad, S. and Postlethwaite, I. (2007). Multi-variable Feedback Control, 2nd edn, John Wi-ley and Sons Ltd.
Stevens, B. L. and Lewis, F. L. (2003). AircraftControl and Simulation, 2nd edn, John Wiley& Sons.
Astrom, K. J. and Hagglund, T. (2006). AdvancedPID control, 1st edn, ISA - Instrumentation,Systems, and Automation Society.
Technologies, P. (2012). Kestrel autopilot,http://www.procerusuav.com/.
Technology, C. (2012). Piccolo autopilot system,http://www.cloudcaptech.com/.
Zhao, S.-Z., Willjuice Iruthayarajan, M., Baskar,S. and Suganthan, P. (2011). Multi-objectiverobust PID controller tuning using two lbestsmulti-objective particle swarm optimization,Information Sciences 181(1): 3323–3335.



![[Teoria de Controle] Projeto Sintonia de Controlador PID](https://static.fdocumentos.tips/doc/165x107/577cc4ef1a28aba7119acf20/teoria-de-controle-projeto-sintonia-de-controlador-pid.jpg)