
Mecânismos - niltonferruzzi.files.wordpress.com · persiste durante o tempo em que o movimento...
20
Mecânismos Prof. Nilton Ferruzzi Prof. Nilton Ferruzzi 1 A06
Transcript of Mecânismos - niltonferruzzi.files.wordpress.com · persiste durante o tempo em que o movimento...
Mecânismos
Prof. Nilton Ferruzzi
Prof. Nilton Ferruzzi 1
A06
Prof. Nilton Ferruzzi 2
Definição de Vibração Mecânica:
É qualquer movimento que se repete, regular ouirregularmente, depois de um intervalo de tempo. Omovimento de um pêndulo e da corda de um violãosão exemplos simples de vibrações no mundo real. Emengenharia estes movimentos ocorrem em elementosde máquinas e nas estruturas, quando estes estãosubmetidos a ações dinâmicas.
Prof. Nilton Ferruzzi 3
Classificação das Vibrações:
Vibração livre: é aquela produzida por uma perturbaçãoinicial que não persiste durante o movimento vibratório.Como exemplo tem-se a vibração do pêndulo simples.Depois de deslocado de sua posição de equilíbrio, opêndulo simples permanece em movimento oscilatóriosem que nenhum efeito externo intervenha.
Vibração forçada: é provocada por um efeito externo quepersiste durante o tempo em que o movimento vibratórioexistir. O movimento de um rotor desbalanceado é típicode uma vibração forçada.
Prof. Nilton Ferruzzi 4
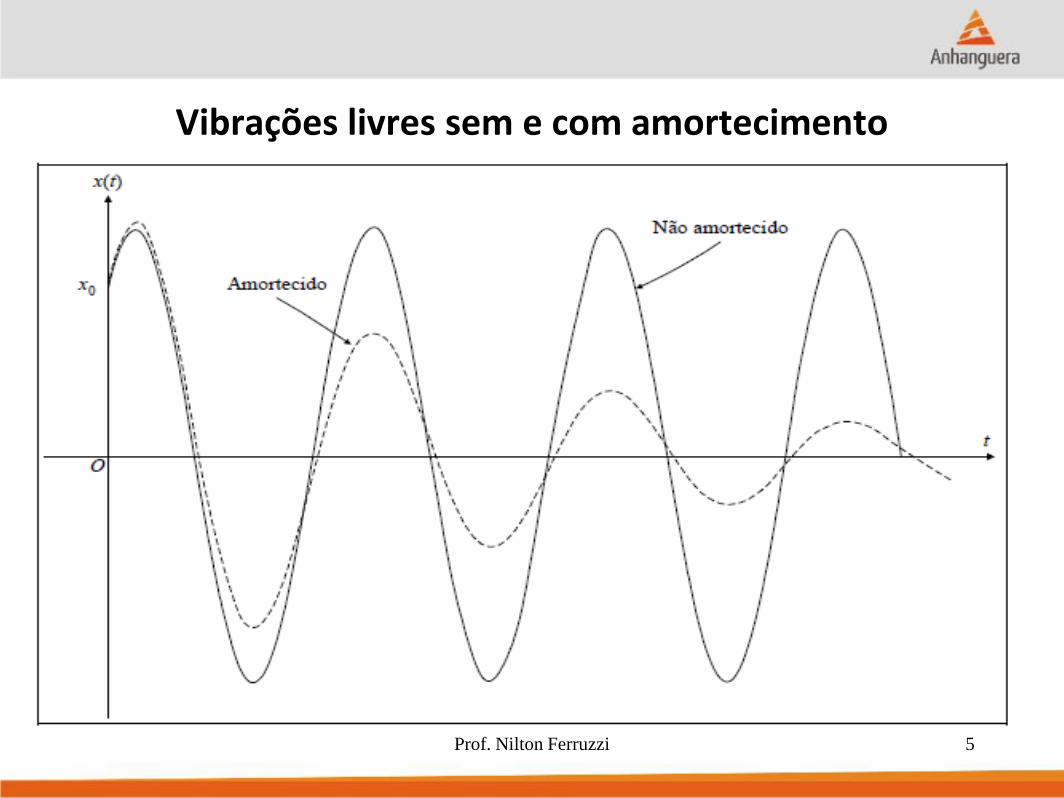
Vibração Amortecida e Não Amortecida
Vibração amortecida: é aquela em que a energia vibratória se dissipa como transcorrer do tempo de forma que os níveis vibratórios diminuemprogressivamente.
Vibração não amortecida: é aquela em que a energia vibratória não sedissipa de forma que o movimento vibratório permanece imutável com opassar do tempo. Os sistemas em que ocorre a vibração não amortecidasão sistemas ideais, pois sempre alguma energia será dissipada em umsistema físico. Entretanto, em muitos casos, o amortecimento é tãopequeno que é possível desprezá-lo, pois os níveis vibratórios diminuemmuito pouco durante o tempo em que o movimento é observado e aanálise do problema se torna matematicamente mais simples. Em setratando de um sistema real, as resistências passivas estão semprepresentes fazendo com que a energia oscilatória se dissipe. Estadissipação de energia é representada pela característica chamadaamortecimento.
Prof. Nilton Ferruzzi 5
Vibrações livres sem e com amortecimento
Prof. Nilton Ferruzzi 6
Vibração Linear e Não Linear
Vibração linear: é aquela que ocorre em um sistema cujoscomponentes atuam linearmente (a força de mola éproporcional ao deslocamento, a força de amortecimento éproporcional à velocidade e a força de inércia é proporcionalà aceleração).
Vibração não linear: é aquela em que um ou maiscomponentes do sistema não se comporta linearmente, ouseja a força produzida não apresenta uma relação linear coma variável cinemática a que se associa (relações quadráticas,cúbicas, logarítmicas, exponenciais, senoidais, etc.).
Prof. Nilton Ferruzzi 7
Vibração Determinística e Aleatória
Vibração determinística: é aquela em que se podeprever todas as características do movimentovibratório em qualquer instante de tempo.
Vibração aleatória: ou não determinística é aquela emque não é possível prever o que irá acontecer nomovimento vibratório.
Prof. Nilton Ferruzzi 8
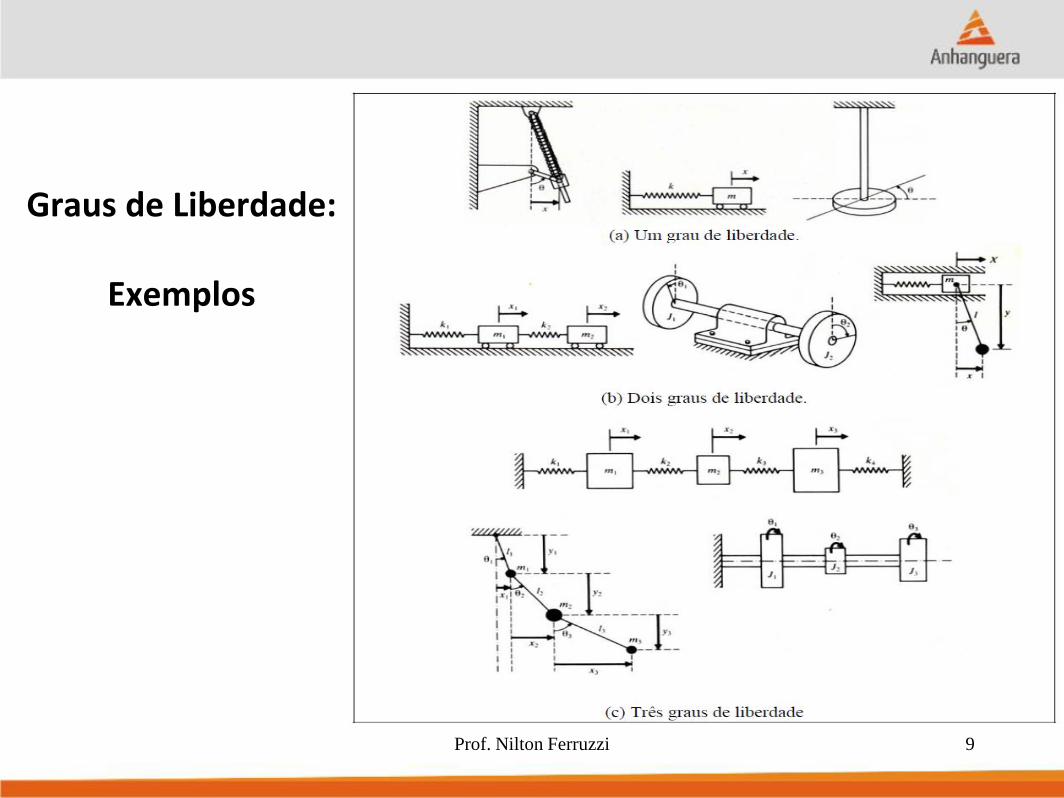
Graus de Liberdade
É o número mínimo de coordenadas independentesnecessárias a descrever completamente o movimentode todas as partes que compõem um sistema vibratório.A Fig. mostra exemplos esquemáticos de sistemas comum, dois e três graus de liberdade. Se um sistema possuipelo menos um grau de liberdade, os valores dasvariáveis que descrevem o estado do sistema (posição,velocidade, aceleração) devem ser especificados. Paraisto é necessário que se escolha um sistema decoordenadas. Esta escolha é arbitrária: pode-se escolherqualquer sistema de coordenadas para descrever ummovimento.
Prof. Nilton Ferruzzi 9
Graus de Liberdade:
Exemplos
Prof. Nilton Ferruzzi 10
Sistemas Contínuos e Discretos
Sistemas que podem ser separados em partes de formaque cada uma delas possua um determinado númerode graus de liberdade e o sistema global tenha umnúmero finito de graus de liberdade são sistemasdiscretos, sendo também chamados de sistemas comparâmetros concentrados. Um sistema contínuo nãopode ser dividido, possuindo um número infinito degraus de liberdade sendo também conhecidos comosistemas com parâmetros distribuídos.
Prof. Nilton Ferruzzi 11
Movimento Harmônico
O movimento harmônico é a forma mais simples com que umavibração se apresenta. Podendo ser representadomatematicamente pela equação:
x = A senω t
ou, se a origem do movimento não coincidir com senωt = 0
x = A sen(ω t +φ )
A forma do movimento harmônico não muda se ao invés de senose utilizar cosseno ou uma soma de seno e cosseno com o mesmoargumento. Estas formas apenas provocam um deslocamento dafunção no tempo, refletida no valor de φ .
Prof. Nilton Ferruzzi 12
As principais características do movimento harmônico são:
Amplitude “A”: É o máximo valor atingido por x. A unidadeutilizada é a mesma da variável x. Na literatura, muitasvezes encontra-se os termos “amplitude de pico”significando o que aqui se chama simplesmente deamplitude e “amplitude pico a pico” significando a diferençaentre o valor máximo e o valor mínimo de x, sendo, para omovimento harmônico, o dobro da amplitude A.
Período “T”: É o tempo transcorrido até que o movimentose repita. O período é expresso por uma unidade de tempo,normalmente segundo.

Prof. Nilton Ferruzzi 13
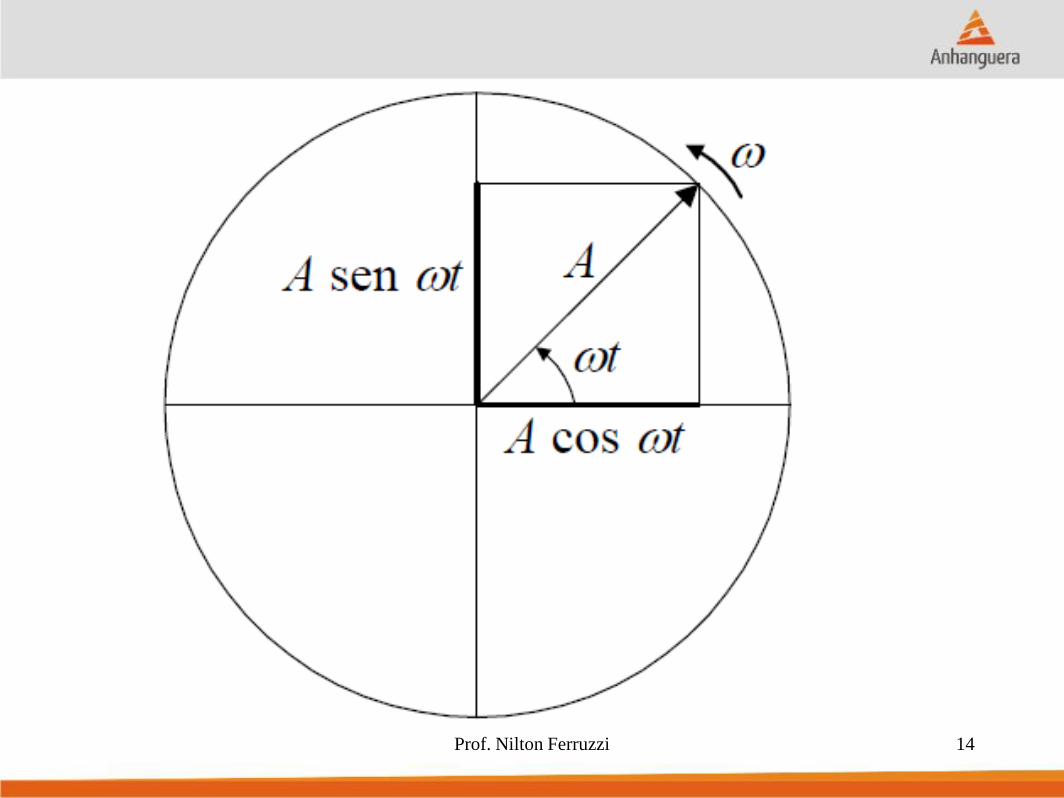
Frequência angular “ω”: É a velocidade angular com queum vetor de amplitude A gira (Fig. 1.9), de forma quesuas projeções horizontal e vertical são movimentosharmônicos. Relaciona-se com a frequência f por:
ω = 2πf
uma vez que um período de oscilação corresponde auma volta completa do vetor o que equivale a um ângulode 2π rad. É, portanto, medida em rad/seg.
Prof. Nilton Ferruzzi 14
Prof. Nilton Ferruzzi 15
Ângulo de fase “φ”: É o ângulo inicial do argumento dafunção senoidal que descreve o movimento harmônico.Deve ser normalmente representado em radianos. Oângulo de fase começa a se tornar importante quando secompara dois movimentos harmônicos não coincidentesno tempo. Ao se estabelecer um movimento como básico,uma escolha adequada do início da observação domovimento fará com que o ângulo de fase represente oquanto um movimento está adiantado ou atrasado emrelação ao outro. O ângulo de fase é normalmente medidoem radianos (outra unidade que permite a medição deângulo também é possível).
Prof. Nilton Ferruzzi 16
Prof. Nilton Ferruzzi 17
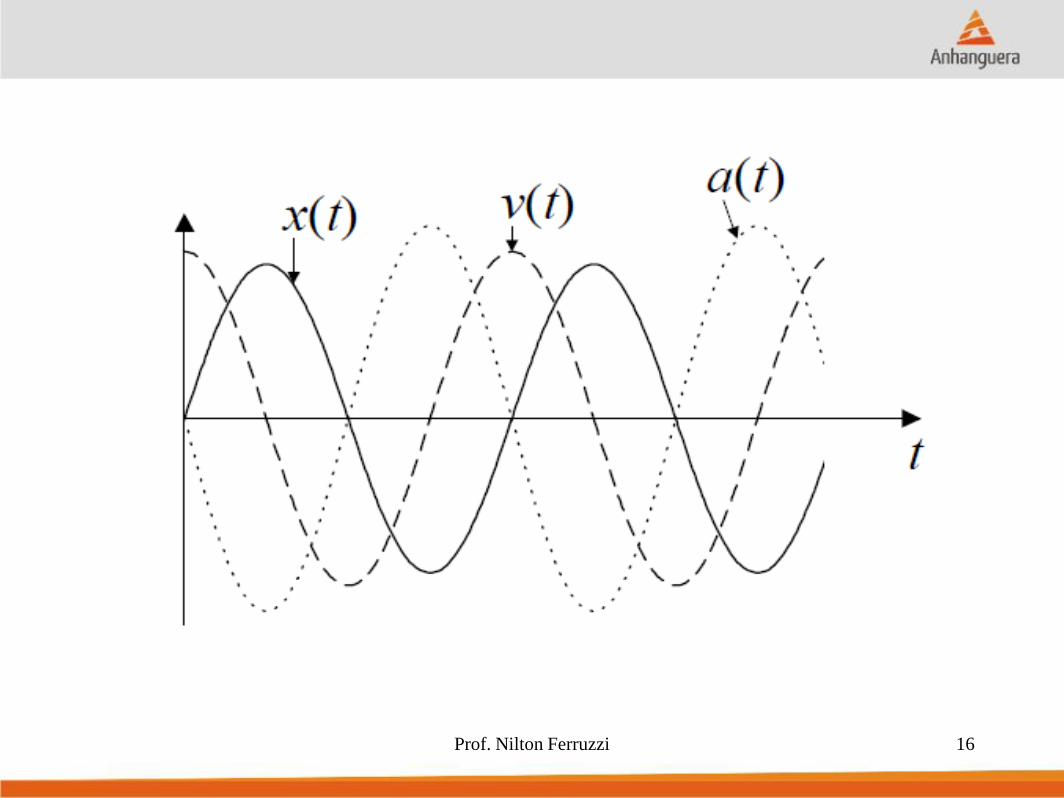
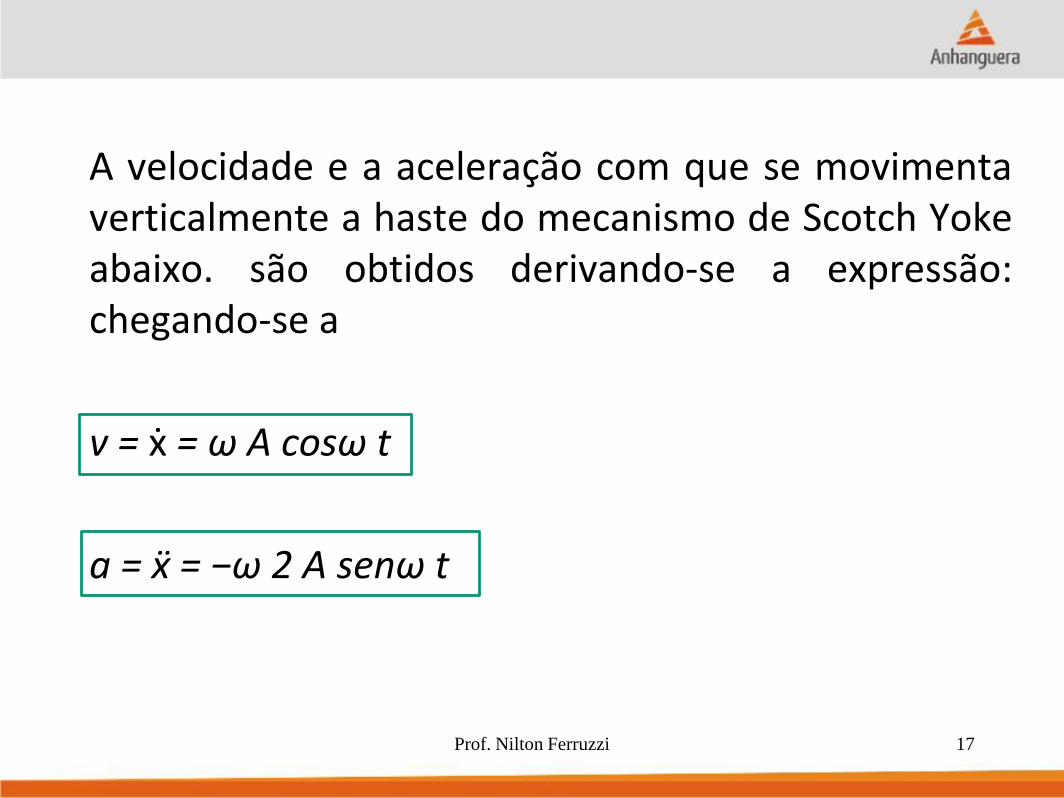
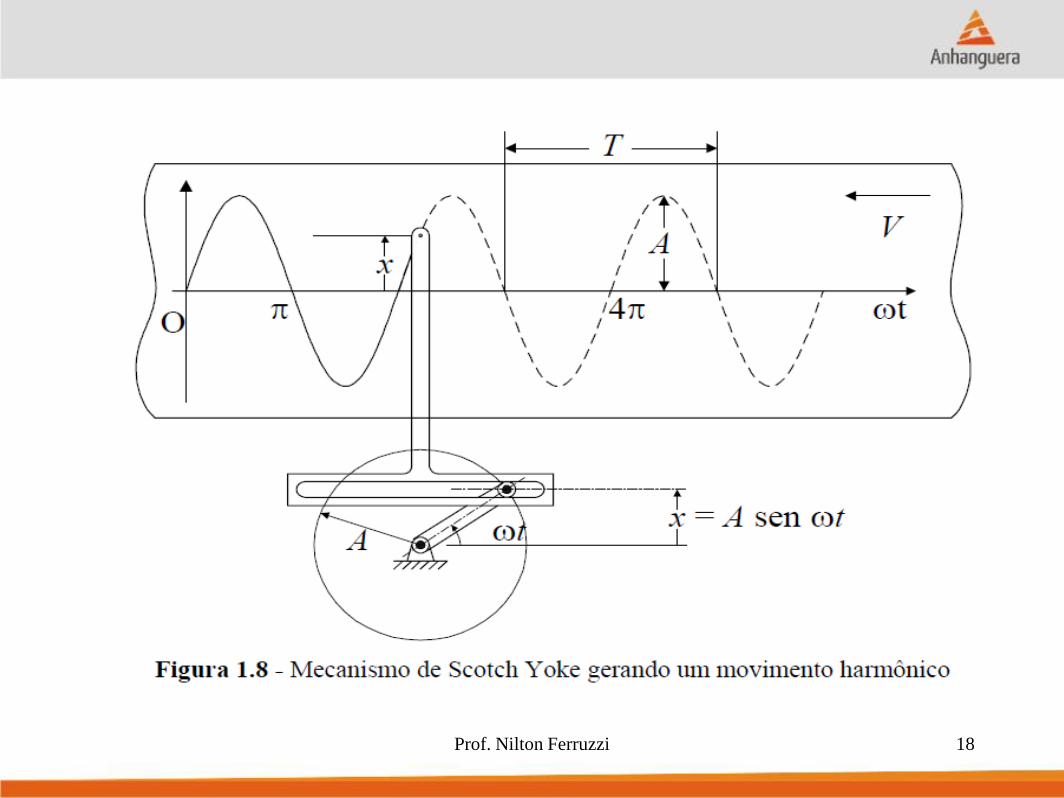
A velocidade e a aceleração com que se movimentaverticalmente a haste do mecanismo de Scotch Yokeabaixo. são obtidos derivando-se a expressão:chegando-se a
v = ẋ = ω A cosω t
a = ẍ = −ω 2 A senω t
Prof. Nilton Ferruzzi 18
Prof. Nilton Ferruzzi 19
Exercício:
Uma peneira vibratório de 10 Kg está sustentada por duas molas,
cada mola possuí uma elasticidade de 50N/m, Determine a
amplitude de Vibração das molas.
Resposta:
A rigidez do sistema todo de duas molas é K = 2 x (50N/m) =
100N/m, portanto a frequência natural (Wn) será:
Wn = K = 100 = 10,0 rad/s.
m 10
Prof. Nilton Ferruzzi 20
OBRIGADO PELA ATENÇÃO

![Instituto Militar de Engenharia - IME (PT)moniz/pdf/prof_dom_pg258_274.pdfitriz das massas: [Ml ltriz dinâmica: [D] = [Ml-I [K] = x uaçöes do movimento vibratório livre: {f} +](https://static.fdocumentos.tips/doc/165x107/5f0f7aa37e708231d4445dc8/instituto-militar-de-engenharia-ime-pt-monizpdfprofdompg258274pdf-itriz.jpg)
















