JULIO ESTEFANO A. ROSA FILHO · Rosa e Marilene Serpeloni Rosa, que sempre me incentivaram a ir em...
40
JULIO ESTEFANO A. ROSA FILHO CONTRIBUIÇÕES DE CONTROLE ÓTIMO Londrina 2011
Transcript of JULIO ESTEFANO A. ROSA FILHO · Rosa e Marilene Serpeloni Rosa, que sempre me incentivaram a ir em...
-
JULIO ESTEFANO A. ROSA FILHO
CONTRIBUIÇÕES DE CONTROLE ÓTIMO
Londrina2011
-
JULIO ESTEFANO A. ROSA FILHO
CONTRIBUIÇÕES DE CONTROLE ÓTIMO
Trabalho de Conclusão de Curso apresentado ao Curso de Graduação em Engenharia Elétrica da Universidade Estadual de Londrina como requisito parcial da conclusão do curso.
Orientador: Ruberlei Gaino
Londrina2011
-
JULIO ESTEFANO A. ROSA FILHO
CONTRIBUIÇÕES DE CONTROLE ÓTIMO
Trabalho de Conclusão de Curso apresentado ao Curso de Graduação em Engenharia Elétrica da Universidade Estadual de Londrina como requisito parcial da conclusão do curso.
BANCA EXAMINADORA
____________________________________Prof. Ruberlei Gaino
Universidade Estadual de Londrina
____________________________________Prof. Márcio Roberto Covacic
Universidade Estadual de Londrina
____________________________________Prof. Osni Vicente
Universidade Estadual de Londrina
Londrina, 24 de outubro de 2011.
-
Dedico este trabalho a meus pais Julio
Rosa e Marilene Serpeloni Rosa, que
sempre me incentivaram a ir em frente
e não desistir do curso.
-
AGRADECIMENTOS
A Deus pela saúde e perspicácia que tive durante todos esses anos
de curso.
À minha família, pais, irmã, irmão, que sempre ficaram do meu lado,
me fortalecendo para vencer mais essa etapa de minha vida.
Aos meus colegas da faculdade de Matemática, e principalmente aos
colegas da Engenharia Elétrica que me serviram como exemplo para concluir o
curso.
Ao meu orientador, Ruberlei Gaino, pelo seu apoio, orientação,
dedicação e o incentivo que me deu durante esse trabalho.
Ao professor Osni Vicente que além de contribuir com o
conhecimento acadêmico, também passou suas experiências de vida.
Ao professor Túlio que me auxiliou durante o projeto de iniciação
científica.
Ao professor Ulisses que sempre estava pronto para ajudar a
qualquer dificuldade que eu pudesse ter.
Ao professor Mangili por ser meu orientador de estágio, e pelo
conhecimento e experiências passados.
À professora Bernadete por estar sempre presente durante todo o
nosso curso, e principalmente por ter me auxiliado no primeiro ano de engenharia
com os aproveitamentos de disciplinas realizadas no curso de matemática.
-
RESUMO
A partir de um modelo real pré-definido de um sistema de cadeira de rodas
controlada por sopro e sucção, será realizada uma análise de técnicas de controle
por meio de um controlador ótimo quadrático. O trabalho visa desenvolver e alcançar
modelos de controles que possam oferecer aos deficientes físicos uma locomoção
com segurança e ao mesmo tempo oferecer uma melhor qualidade de vida. Os
procedimentos baseiam-se em análises, condições matemáticas e simulações
computacionais utilizando o software Matlab.
Palavras-chave: Cadeira de Rodas, Índice de desempenho, análise matemáticas, simulações.
-
ABSTRACT
From a real model of pre-defined system of a wheelchair controlled by blowing and
sucking, there will be a technical analysis of control by means of a quadratic optimal
controller. The work aims to develop and achieve control models that can provide the
disabled with a mobility and safety while offering a better quality of life. The
procedures are based on analysis, computer simulations and mathematical
conditions using the Matlab software.
Key words: Wheelchair, performance index, analysis, mathematical simulations.
-
LISTA DE ILUSTRAÇÕES
Figura 1 – Solução global de um sistema de cadeira de rodas ...............................10
Figura 2 – Sistema de controle da cadeira de rodas ...............................................25
Figura 3 – Curva dos motores R e L considerando V=1 e Omega=0......................26
Figura 4 – Curva dos motores R e L considerando V=0 e Omega=1......................27
Figura 5 – Curva dos motores R e L considerando V=0 e Omega=0......................28
Figura 6 – Gráfico da resposta do sistema para 2et s e 0.58 ..........................28
Figura 7 – Gráfico da resposta do sistema para 2et s e 0.56 ..........................29
-
SUMÁRIO
1- INTRODUÇÃO.........................................................................................................09
2- MODELO DE UM CONTROLE DE CADEIRA DE RODAS COM TÉCNICAS DE
CONTROLE INTELIGENTES E AVANÇADA.............................................................10
3- SISTEMAS REGULADORES QUADRÁTICOS ÓTIMOS.......................................12
3.1- CONCEITOS DE CONTROLE LQR...........................................................................12
4- REPRESENTAÇÃO DA FUNÇÃO DE TRASNFERÊNCIA DO MOTOR DA
CADEIRA DE RODAS................................................................................................16
4.1-ENCONTRANDO AS RAÍZES DO SISTEMA.................................................................17
4.2 -MATRIZ DE CONTROLABILIDADE...........................................................................17
5- CONTRIBUIÇÕES DE CONTROLE.......................................................................18
5.1 -DETERMINAÇÃO DO GANHO K E MINIMIZAÇÃO DO ÍNDICE DE DESEMPENHO J........18
5.2-ENCONTRANDO 1K e 2K PELO MÉTODO DE ALOCAÇÃO DE PÓLOS.......................20
5.3- OBTENÇÃO DA MATRIZ Q POR MEIO DE 1K e 2K ................................................24
5.4-SIMULAÇÕES E RESULTADOS...............................................................................25
5.4.1-Análise das Curvas de Saída dos motores em resposta ao degrau
unitário......................................................................................................................25
6-ANÁLISE DO ÍNDICE DE DESEMPENHO J ATRAVÉS DA MATRIZ DE GANHO
K................................................................................................................................30
CONCLUSÃO............................................................................................................36
REFERÊNCIAS BIBLIOGRÁFICAS.........................................................................37
APÊNDICE................................................................................................................38
APÊNDICE A- Matrizes Definidas Positivas..........................................................39
-
9
1- INTRODUÇÃO
Atualmente são muitas as organizações no mundo que estão
interessadas em desenvolver cadeiras de rodas capazes de recuperar as
habilidades perdidas e restrições devido à deficiência física.
Com o recente avanço tecnológico, muitas das pessoas portadoras
de deficiência já podem agora ocupar e ter sua capacidade profissional parcialmente
restabelecida.
Graças a avanços na aplicação de técnicas de controle inteligente
para o controle da movimentação e sistemas de rastreamento de trajetória em
cadeiras de rodas, até mesmo pessoas com alto grau de deficiência podem ter uma
qualidade de vida melhor. (adaptado de Sobrinho (2003) e Mazzo (2000)).
O projeto aqui apresentado é baseado no desenvolvimento e análise
de um controle ótimo u(t), descrito segundo uma formulação em variáveis de
estado.
O projeto deve ser baseado na minimização de um índice de
desempenho definido aqui como0
( )T TJ x Qx u Ru dt
.
Usando a técnica conhecida por controle ótimo quadrático, e através
da equação no espaço de estados definida por .
x Ax Bu deve se encontrar um
possível vetor de controle u(t) que trasfira o estado para a região do espaço de
estados desejada e para o qual o índice de desempenho seja minimizado.
-
10
2-MODELO DE UM CONTROLE DE CADEIRA DE RODAS COM TÉCNICAS DE
CONTROLE INTELIGENTES E AVANÇADAS.
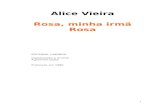
O diagrama de blocos da Figura 1 apresenta uma visão de como
seria uma solução global de um controle aplicado a uma cadeira de rodas
inteligente.
Figura 1- Solução global de um sistema de cadeira de rodas
(adaptado de (Spinosa et. al., 2001)).
Resumidamente as principais vantagens deste projeto (adaptado de
Spinosa et.al.,2001) são:
1-Controle adaptativo com uma linha de identificação de parâmetros
do bloco da trajetória-motor-tacômetro que permite o controle ser atualizado para
responder a mudanças nas condições de operação, tais como transporte de cargas
e suas distribuições no veículo, assimetria e rugosidade do chão.
2-O controle ótimo permite que limitações de projeto, como máximo
nível elétrico de entrada e saída que movem o motor, passem a ser inclusos na
teoria de controle, possibilitando melhorar o comportamento do sistema de controle
de feedback.
3-O controle ótimo adaptativo, projetado corretamente, permite que
as duas vantagens anteriores possam ser incorporadas. Assim os parâmetros do
projeto envolvidos na teoria de controle são atualizados de acordo com a linha de
mudanças detectadas.
-
11
4-Erros de orientação no rastreamento da trajetória são corrigidos
com um controle ótimo que estabelece os valores apropriados para a velocidade
angular do veículo.
5-A velocidade linear V do veículo é calculada por meio do controle
fuzzy de acordo com a distância a percorrer e o raio de curvatura do caminho
estabelecido.
6-Os itens 4 e 5 contribuem para reduzir o risco de derrapagem.
O sistema conta ainda com sensores de posicionamento global
(infravermelho e ultra-sônico) que proporcionam duas importantes melhorias:
1- Adaptar o controle de movimento da inércia dos usuários, às
limitações físicas dos motores elétricos e com as características do piso.
2-Permitir orientação autônoma caso o usuário sofra de um alto grau
de deficiência, de forma que somente os pontos iniciais e finais precisam ser
indicados à cadeira de rodas.
A solução encontrada concentra-se na incorporação de técnicas
avançadas e inteligentes de controle digital que melhoram as características da
cadeira.
O veículo é caracterizado por um sistema de tração diferencial com
duas rodas traseiras e duas dianteiras livres.
O sistema de locomoção funciona com um motor de corrente
contínua de imã permanente.
A estratégia de orientação autônoma é suportada pelos seguintes
subsistemas: a) captura do ambiente, b) interface usuário cadeira, c) integração de
multi-sensores, geração de trajetória e caminho, d) controle dos atuadores de
movimento.
As variáveis envolvidas no controle são: velocidade angular da roda
direita ωr e velocidade angular da roda esquerda ωl, posições x-y e orientação da
cadeira no sistema de referência cartesiana, e as velocidades linear V e angular Ω.
-
12
3-SISTEMAS REGULADORES QUADRÁTICOS ÓTIMOS
Em projetos de sistemas de controle automático, é desejável que o
projeto atinja o desempenho operacional desejado para determinada situação. Em
sistemas de controle ótimo esse desempenho pode ser formulado diretamente em
termos de índices de desempenho no domínio do tempo. Exemplos típicos a serem
citados são o valor máximo de ultrapassagem e o tempo de subida da resposta para
uma entrada em degrau.
Os sistemas que são ajustados de modo a proporcionar um índice
de desempenho mínimo são freqüentemente chamados de sistemas de controle
ótimo. Segundo OGATA, (2003):
“Embora o controlador possa em muitas aplicações práticas,
não ter nada a ver com a ‘característica ótima’, o ponto
importante é que o projeto baseado no índice quadrático de
desempenho resulte em um sistema de controle estável”.
Neste trabalho será considerado o projeto de um sistema de controle
ótimo descrito segundo uma formulação em variáveis de estado e um sinal de
controle ótimo u(t), de modo que o desempenho do sistema seja otimizado.
3.1 CONCEITOS DE CONTROLE LQR
Conforme a teoria desenvolvida em OGATA, (2003), o controle LQR,
conhecido como controle ótimo quadrático apresenta a vantagem de que o sistema a
ser projetado sempre será estável exceto no caso em que o sistema não seja
controlável.
Através de um estado inicial 0( )x t qualquer, o problema do regulador
ótimo é encontrar o vetor u(t) que realize a transferência de um estado para outra
região do espaço de estado desejada. O desempenho desejado pode ser formulado
diretamente em termos de índices de desempenho no domínio do tempo. Os
sistemas que são ajustados de modo a fornecer um índice de desempenho mínimo
são frequentemente chamados de sistemas de controle ótimo.
-
13
Considere-se agora um sistema de controle definido da seguinte
forma:
.
x Ax Bu [3.1]
Onde, x= vetor de estado (n-dimensional)
u=vetor de controle (r-dimensional)
A=matriz constante (nxn)
B=matriz constante (nxr)
Será escolhido um controlador com retroação de modo que u seja
alguma função das variáveis de estado x, em conseqüência:
u(t)=-Kx(t) [3.2]
É possível encontrar a matriz K do vetor de controle ótimo.
Ao projetar o sistema de controle, é interessante escolher o vetor de
controle u(t) de modo que um dado índice de desempenho seja minimizado.
0
( )T TJ x Qx u Ru dt
[3.3]
Onde
Q=matriz hermitiana definida positiva ou real simétrica
R=é uma matriz hermitiana definida positiva ou real simétrica
O papel da matriz Q e R é definir o peso relativo que o estado e o
sinal do controle têm no cálculo do critério J. As matrizes Q e R determinam o
consumo de energia dos sinais de controle.
Para encontrar a otimização desejada é necessário substituir a
equação (3.2) na (3.1) obtendo:
( )x Ax BKx A BK x
[3.4]
Considerando que a matriz A-BK seja estável, substituindo agora a
equação (3.2) na (3.3) tem-se:
0
( )T T TJ x Qx x K RKx dt
[3.5]
0
( )T Tx Q K RK xdt
[3.6]
-
14
Para obter o valor mínimo de J será assumido e postulado da
existência de uma equação diferencial exata tal que:
( ) ( )T T Td
x Q K RK x x Pxdt
[3.7]
Onde P é uma matriz hermitiana definida positiva a ser determinada.
Sem perda de generalidade será usada uma matriz simétrica P,
P12=P21 para simplificar o tratamento algébrico.
Do lado direito da equação (3.7) temos:
( ) [( ) ( )]T T T T Td
x Px x Px x Px x A BK P P A BK xdt
[3.8]
( ) [( ) ( )]T T T Tx Q K RK x x A BK P P A BK x [3.9]
Comparando as duas equações e para que a igualdade seja
verdadeira devemos ter que:
( ) [( ) ( )]T TQ K RK A BK P P A BK [3.10]
Se A-BK for uma matriz estável, então existirá uma matriz definida
positiva P que satisfaça à equação (3.10).
Assim devemos apenas determinar os elementos da matriz P a partir
da equação (3.10). Como o sistema é estável sempre existirá uma matriz P positiva
que satisfaça a equação (3.10).
Portanto se resolvermos a equação (3.10) e encontrarmos uma
matriz positiva P, o sistema será estável.
O índice de desempenho é calculado por:
00
( ) | ( ) ( ) (0) (0)T T T T TJ x Q K RK xdt x Px x Px x Px
[3.11]
Para o cálculo do limite superior da integral de J em t=∞ temos que
( ) 0x .
Obtendo assim,
(0) (0)TJ x Px [3.12]
Portanto o índice de desempenho pode agora ser calculado em
termos da condição inicial x(0) e P.
Supondo agora que R seja uma matriz hermitiana definida positiva
ou real simétrica, onde
-
15
TR T T [3.13]
Onde T é uma matriz não singular. Então temos da equação (3.10):
( ) ( ) 0T T T T TA K B P P A BK Q K T TK [3.14]
Que pode ser reescrita como:
1 1 1[ ( ) ] [ ( ) ] 0T T T T T T TA P PA TK T B P TK T B P PBR B P Q [3.15]
Para J ser minimizado em relação a K devemos minimizar a
expressão
1 1[ ( ) ] [ ( ) ]T T T T T Tx TK T B P TK T B P x , em relação a K.
O mínimo ocorre quando ela é zero ou quando
1( )T TTK T B P [3.16]
Isolando K temos:
1 1 1( )T T TK T T B P R B P [3.17]
A expressão (3.17) fornece a matriz ótima K
Assim o índice de controle é dado por:
1( ) ( ) ( )Tu t Kx t R B Px t [3.18]
A matriz P deve satisfazer a seguinte equação reduzida:
1 0T TA P PA PBR B P Q [3.19]
A equação (3.19) é denominada equação reduzida de Riccati.
-
16
4-REPRESENTAÇÃO DA FUNÇÃO DE TRANSFERÊNCIA DO MOTOR DA
CADEIRA DE RODAS
Neste trabalho será considerado um projeto de um sistema de
controle ótimo descrito segundo uma formulação em variáveis de estado. No caso
de Mazzo (2000) e Spinosa (2001), eles identificaram uma função de primeira ordem
do motor CC.
Para nosso projeto de controle é possível supor que a função de
transferência de segunda ordem para o motor DC da cadeira de rodas seja dada
por:
2
( ) 10
( ) 1 10
Y s
R s s s
[4.1]
Considerando ainda, segundo OGATA, (2003), que uma função de
transferência possa ser representada por:
1
0 1 11
1 1
( ) ...
( ) ...
n nn n
n nn n
Y s b s b s b s b
U s s a s a s a
[4.2]
A representação dessa função no espaço de estados na forma
canônica controlável é obtida por:
1 1
2 2
1 1
1 2 1
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
1n n
n n n n n
x x
x x
u
x x
x a a a a x
[4.3]
e
1
20 1 1 0 1 1 0 0n n n n
n
x
xy b a b b a b b a b b u
x
[4.4]
Portanto para a função (4.1):
1 1
2 2
( ) ( )0 1 0( )
( ) ( )10 1 1
x t x tu t
x t x t
[4.5]
12
( )( ) 10 0
( )
x ty t
x t
[4.6]
-
17
4.1-ENCONTRANDO AS RAÍZES DO SISTEMA
Para encontrar as raízes do sistema fazemos:
1,21 39
0.5 3.1222
s j
[4.7]
Como as partes reais das raízes são negativas, o sistema é estável.
4.2 -MATRIZ DE CONTROLABILIDADE
Segundo OGATA, (2003) um sistema será dito controlável no
instante 0t se for possível, por meio de um vetor de controle, transferir o sistema de
qualquer estado inicial 0 ( )x t para qualquer outro estado, em um intervalo de tempo
finito. A controlabilidade tem o papel importante no projeto de sistemas de controle
no espaço de estados, é ela quem dita a existência de uma solução completa para
um problema.
Por definição, para saber se o sistema é controlável é necessário
calcular a matriz de controlabilidade por:
C B AB [4.8]Se det (C) for diferente de zero, o sistema é controlável
No sistema em estudo a matriz de controlabilidade será dada por:
0 0 1 0 0 1
1 10 1 1 1 1C
[4.9]
Como det (C)=-1 , temos que o sistema é controlável.
Com as matrizes A e B é possível escrever as equações no espaço
de estado.
-
18
5-CONTRIBUIÇÕES DE CONTROLE
Neste capítulo será utilizada a equação de Riccati para obter a
matriz de ganho K, em função da matriz Q.
Para isso será analisada qual a melhor matriz Q que pode ser
utilizada neste projeto. Primeiramente utilizando a equação de Riccati, será
analisada qual a faixa de valores que podem ser aceitos para compor os elementos
da matriz Q.
Através do sinal de controle ( )u Kx t , será montado um projeto
com um controle ótimo, que por sua vez utilizará a técnica de projeto LQR. O
objetivo é encontrar a matriz 1 2K K K de modo a minimizar o índice de desempenho
0
( )T TJ x Qx u Ru dt
. [5.0]
5.1 -DETERMINAÇÃO DO GANHO K E MINIMIZAÇÃO DO ÍNDICE DE DESEMPENHO J
Considerando que as matrizes Q e R da equação (3.19) sejam
dadas por:
0
0Q
e R=1 [5.1]
Através da equação reduzida de Riccati, (OGATA, 2003), tem-se
que:
1 0T TA P PA PBR B P Q [5.2]
Inserindo os valores das matrizes,
11 12 11 12 11 12 11 1212 22 12 22 12 22 12 22
0 10 0 1 0 01 0 1
1 1 10 1 1 0
P P P P P P P P
P P P P P P P P
0 0
0 0
[5.3]
-
19
12 22 12 11 12 12 11 12
11 12 12 22 22 12 22 22 12 22
10 10 10 0 0 0 0
10 0 0 0 0
P P P P P P P P
P P P P P P P P P P
[5.4]
212 11 12 22 12 12 22
211 12 22 12 22 12 22 22
20 10 0 0 0
10 2 2 0 0 0
P P P P P P P
P P P P P P P P
[5.5]
Obtém-se as seguintes equações:
212 1220 0P P [5.6]
11 12 22 12 2210 0P P P P P [5.7]
212 22 222 2 0P P P [5.8]
De (5.6)
2
12
20 20 410 100
2P
[5.9]
Como 12P e 22P constituem os elementos da matriz de ganho K,
estes por sua vez deverão serem positivos.
Para que 12P seja positivo deve-se ter:
100 10 [5.10]
0 [5.11]
De (5.8) temo-se que:
222 22 122 2 0P P P [5.12]
Substituindo (5.9) em (5.12):
22 222 20 2 100 0P P [5.13]
22
2 4 4(20 2 100 )1 19 2 100
2P
[5.14]
Para que 22P seja positivo deve-se ter:
1 19 2 100 0 [5.15]
20 2 100 [5.16]
Conforme OGATA, (2003) a matriz de ganho K é dada por:
1 TK R B P [5.17]
-
20
11 12 12 2212 22
0 1P P
K P PP P
[5.18]
10 100 1 19 2 100K [5.19]
A equação característica desse sistema é dada por:
1 20 0 1 0
00 10 1 1
ssI A BK K K
s
[5.20]
1 2
0 010
10 1
s
K Ks
[5.21]
1 2
10
10 1
s
K s K
[5.22]
2 2 1(1 ) 10 0s s K K [5.23]
2
2 2 11,2
(1 ) (1 ) 40 4
2
K K Ks
[5.24]
Para que o sistema seja estável deve-se ter que as raízes de 1,2s
tenham partes reais negativas, ou seja:
2(1 ) 0K [5.25]
2 1K [5.26]
Substituindo o valor de 2K , equação (5.19) na equação (5.26) tem-
se:
1 19 2 100 1 [5.27]
19 2 100 [5.28]
Resumindo:
Para a matriz Q ser positiva deve-se ter, 0 e 0 .
Para 12P positivo 0
Para 22P positivo 20 2 100
Para o sistema ser estável deve-se ter 19 2 100
Portanto, quaisquer valores de α e β maiores que zero poderão ser
escolhidos para o projeto.
-
21
5.2-ENCONTRANDO 1K e 2K PELO MÉTODO DE ALOCAÇÃO DE PÓLOS
Através dos resultados obtidos anteriormente serão analisadas quais
as conseqüências para a realização de um projeto com alocação de pólos, e sua
viabilidade.
Para o nosso projeto adotaremos como tempo de amortecimento o
valor de te=2s e iremos avaliar quais os valores ou faixa em que o coeficiente de
amortecimento viabiliza a obtenção de K1 e K2 para a realização do projeto por
meio de alocação de pólos.
Em projetos normais, dada as especificações de desempenho
calcula-se através da equação (5.29) o valor do coeficiente de amortecimento:
21
pM e
[5.29]
Encontrado o valor do coeficiente de amortecimento é possível obter
então a freqüência natural não amortecida por meio da equação do tempo de
acomodação (5.30), levando em consideração o critério de 2%.
4
en
t
[5.30]
Substituindo os valores de acordo com o desejado para o tempo de
acomodação e o valor obtido para o coeficiente de amortecimento, obtém-se a
freqüência natural não amortecida.
Com isso chega-se aos pólos dominantes em malha fechada, que
pode ser expressos pela seguinte equação:
21.2 1n ns [5.31]
Para o nosso projeto, conforme encontrado anteriormente tem-se
pela equação (5.24) que o valor de 1,2s é dado por:
2
2 2 11,2
(1 ) (1 ) 40 4
2
K K Ks
[5.32]
Comparando as equações (5.31) e (5.32) obtém-se da primeira
igualdade que:
21 2 nK [5.33]
Da segunda igualdade temos que:
-
22
2 22 12 1 (1 ) 40 4n K K [5.34]
2 2 2 2 2 14 4 4 40 4n n n K [5.35]
21 10nK [5.36]
Da equação (5.36) vemos que 1K é função somente de n , e
através dessa mesma equação obtém-se a primeira condição para a alocação de
pólos, no projeto LQR, pois deve-se ter que:
1 0K [5.37]
ou
2 10 0n [5.38]
Isolando n da equação (5.30) e substituindo na equação (5.38) tem-
se:
2
410
et
[5.39]
22 1.6et [5.40]
0.632 [5.41]
Pela equação (5.19) tem-se ainda que 2K é dado por:
2 1 19 2 100K [5.42]
Rearranjando essa equação temos:
22 1 19 2 100K [5.43]
Para que seja positivo e não gere valores negativos para
deve-se ter que:
222 100 1 19K [5.44]
Substituindo a equação (5.33) em (5.44)
2 22 100 4 19n [5.45]
Pela equação (5.19) pode-se escrever que:
1 10 100K [5.46]
Substituindo (5.46) em (4.45)
2 212 1 4 nK [5.47]
-
23
Substituindo agora a equação (5.36) em (5.47) e rearranjando tem-
se:
2 2(4 2) 19 0n [5.48]
Essa equação do segundo grau nos fornece os seguintes valores de
n :
2
19
4 2n
[5.49]
Para que n assuma valores reais deve-se ter ainda que:
24 2 0 [5.50]
ou que
0.840 [5.51]
Pela equação (5.48) o coeficiente de n será negativo, portanto a
equação do segundo grau terá sua concavidade voltada para baixo, assim para a
equação (5.48) ser positiva deve-se ter que:
5.56 5.56n [5.52]
Substituindo n e considerando somente o intervalo de 0n , tem-
se:
4
5.56et [5.53]
Portanto tem-se:
0.719
et [5.54]
Para um valor de 2et s tem-se:
0.359 [5.55]
Pelas equações (5.41), (5.51) e (5.55) tem-se que o intervalo
apropriado para é dado por:
0.359 0.632 [5.56]
Portanto para realização da alocação de pólos deve-se tomar o
cuidado na escolha do tempo de amortecimento, e do máximo valor de
ultrapassagem. Esse tipo de método quando aplicado para o controle ótimo
-
24
quadrático, fornece alguns valores que são incompatíveis com o projeto, portanto
devem ser analisados previamente.
Mostra-se através de simulações com o controle da figura 2, pag. 26,
que o melhor valor para com uma escolha de 2et s , que proporciona uma
melhor resposta de saída ao degrau de entrada, é o valor de 0.573 .
Com esses valores, 0.573 e 2et s encontra-se que
3.48n [5.57]
Substituindo na equação (5.36) tem-se:
1 2.15K [5.58]
Pela equação (5.33) tem-se:
2 3K [5.59]
Através da equação (5.29) tem-se que o máximo valor de
ultrapassagem é dado por:
11.1%pM [5.60]
5.3- OBTENÇÃO DA MATRIZ Q POR MEIO DE 1K e 2K
Através do método de Riccati, os valores encontrados de 1K e 2K na
matriz de ganho da equação (5.19) são dados por:
1 10 100K [5.61]
2 1 19 2 100K [5.62]
Substituindo o valor de 1K na equação (5.61) obtém-se o valor de
47.61 . [5.63]
Da mesma forma inserindo o valor de 2K na equação (5.62) obtém-
se um valor de:
10.70 [5.64]
Com esses valores em mãos, é possível montar a matriz Q que será
dada por:
-
25
47.61 0
0 10.70Q
[5.65]
Como 11q é maior que 22q temos que o sistema apresentará também
uma resposta um pouco mais rápida.
5.4-SIMULAÇÕES E RESULTADOS
Para se chegar ao melhor valor de 1K e 2K para o projeto prático, serão
realizadas algumas simulações para o valor de 2et s e 0.359 0.632 .
A idéia é levantar experimentalmente algumas curvas de resposta de saída do
motor em função da aplicação de um degrau unitário na figura 2, descrita a seguir.
5.4.1-Análise das Curvas de Saída dos motores em resposta ao degrau unitário
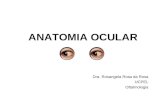
O sistema de controle da cadeira de rodas é representado pelo
seguinte diagrama de blocos:
-
26
Figura 2- Sistema do controle da cadeira de rodas (adaptado de Sobrinho
(2003) e Mazzo (2000))
Experimentalmente foi obtido que um valor de 0.573 fornece um
ganho 1 2.15K e 2 3K . Com esses valores ao se aplicar um degrau nas entradas
V e Ohm da figura 2, obtém-se os seguintes gráficos para a resposta de saídas dos
motores direito e esquerdo:
Considerando V=1 e Ohm=0, os motores da direita e da esquerda
andam em linha reta.
Figura 3- Curva dos motores R e L considerando V=1 e Ohm=0
Para V=0 e Ohm=1 os motores apresentam curvas opostas fazendo
a rotação da cadeira de rodas.
-
27
Figura 4- Curva dos motores R e L considerando V=0 e Ohm=1
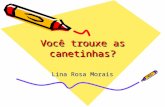
Para V=0 e Ohm=0 os motores ficam parados.
Figura 5- Curva dos motores R e L considerando V=0 e Omega=0
Para se ter uma idéia da influência de na obtenção da matriz Q e
K e conseqüentemente na resposta de saída dos motores, foram feitas duas
simulações para um bem próximo ao encontrado anteriormente.
-
28
Nas duas simulações, foram consideradas apenas a resposta para o
motor da direita.
Figura 6 - Gráfico da resposta do sistema para 2et s e 0.58
Pela figura 6 vemos que para maior que 0.573 a resposta de saída
do motor se estabiliza um pouco abaixo do valor 1.
-
29
Figura 7-Gráfico da resposta do sistema para 2et s e 0.56 0
De forma semelhante à análise feita anteriormente se diminuirmos o
valor de teremos que a resposta de saída do motor ao degrau de entrada se
estabiliza acima do valor 1. Nota-se que apenas variações de décimos de
centésimos em já proporcionam uma diferença considerável no valor de saída.
-
30
6-ANÁLISE DO ÍNDICE DE DESEMPENHO J ATRAVÉS DA MATRIZ DE GANHO
K
Neste capítulo apresenta-se uma análise de como se obter a
minimização do índice de desempenho através da diferenciação da função de J em
relação a 1K e 2K . Com isso ao encontrar a função de J minimizada, encontra-se os
valores de 1K e 2K com valores ótimos.
Para isso considerando as mesmas matrizes do projeto proposto
anteriormente:
0 1
10 1A
, 0
0Q
, 0
1B
, 1R [6.1]
Utilizando um procedimento parecido ao OGATA, 2003 até a
equação (6.15) formulam-se os seguintes resultados:
Considerando agora a seguinte equação no espaço de estado:
x Ax Bu
[6.2]
e o seguinte sinal de controle:
( )u Kx t [6.3]
Para o projeto LQR deve-se encontrar a matriz 1 2K K K de forma a minimizar o índice de desempenho:
0
( )T TJ x Qx u Ru dt
[6.4]
Fazendo (6.3) em (6.2)
( )x Ax B Kx
[6.5]
( )x A BK x
[6.6]
Fazendo agora (6.3) em (6.4) obtém-se:
0
TTJ x Qx Kx R Kx dt
[6.7]
0
T T TJ x Qx x K RKx dt
[6.8]
0
T TJ x Q K RK xdt
[6.9]
-
31
Substituindo R=1
0
T TJ x Q K K xdt
[6.10]
Fazendo T T Tdx Q K K x x Pxdt
[6.11]
Temos:
( )T T T Tx Q K K x x Px x Px [6.12]
= [( ) ] ( )T TA BK x Px x P A BK x [6.13]
[( ) ( )]T Tx A BK P P A BK x [6.14]
Logo:
( ) ( ) ( )T TQ K K A BK P P A BK [6.15]
Substituindo as matrizes na equação [6.15]
1 1 22
0
0
KK K
K
11 12 11 121 2 1 212 22 12 22
0 1 0 0 1 0
10 1 1 10 1 1
tP P P P
K K K KP P P P
[6.16]
21 1 2
21 2 2
0
0
K K K
K K K
11 12 11 12
1 2 12 22 12 22 1 2
0 0 0 00 1 0 1
10 1 10 1
tP P P P
K K P P P P K K
[6.17]
21 1 2
21 2 2
K K K
K K K
11 12 11 12
1 2 12 22 12 22 1 2
0 1 0 1
10 1 10 1
tP P P P
K K P P P P K K
[6.18]
21 11 12 12 1 11 12 21 1 2
22 12 22 22 1 12 22 21 2 2
0 10 (10 ) (1 )
1 1 (10 ) (1 )
K P P P K P P KK K K
K P P P K P P KK K K
[6.19]
212 1 12 1 22 1 11 12 21 1 2
222 1 11 12 2 12 22 2 12 22 21 2 2
(10 ) (10 ) (10 ) (1 )
(10 ) (1 ) (1 ) (1 )
P K P K P K P P KK K K
P K P P K P P K P P KK K K
[6.20]
-
32
Pela igualdade da matriz anterior tem-se que:
21 12 1 12 110 10K P K P K [6.21] 1 2 22 1 11 12 210 1K K P K P P K [6.22]
22 12 22 2 12 22 21 1K P P K P P K [6.23]
Da equação (6.21) obtém-se:
2
112
120 2
KP
K
[6.24]
Substituindo agora o valor de 12P na equação (6.23) obtém-se:
2
2 12 22 2
1
( ) 2 2 (1 )20 2
KK P K
K
[6.25]
O que fornece:
2 2
1 222
2 1 2(1 )(20 2 ) 2(1 )
K KP
K K K
[6.26]
Substituindo agora 12P e 22P na equação (6.22) tem-se:
2 2 2
1 2 11 2 1 11 2
2 1 2 1
( ) ( )( ) 10 (1 )
(1 )(20 2 ) 2(1 ) (20 2 )
K K KK K K P K
K K K K
[6.27]
Obtendo:
2 2 2
1 2 1 1 211 1 2
2 2 1
( ) ( )(10 ) ( )(1 )
2(1 ) 2(1 ) (20 2 )
K K K K KP K K
K K K
[6.28]
Segundo OGATA, (2003), o índice de desempenho J é dado por
(0) (0)TJ x Px .
Então se escrevermos J na forma matricial tem-se que:
11 12 11 212 22 2
(0)(0) (0)
(0)
P P xJ x x
P P x
[6.29]
11 11 2 12 1 12 2 222
(0)(0) (0) (0) (0)
(0)
xx P x P x P x P
x
[6.30]
2 21 11 1 2 12 1 2 12 2 22(0) (0) (0) (0) (0) (0)x P x x P x x P x P [6.31]
Substituindo os valores de ijP obtém-se:
2 2 2 221 2 1 2 1 1 2
1 2 12 1
10 10 ( )(1 )(0)
2 2 20 2
K K K K K K KJ K K x
K K
+
-
33
+ 2 2 2
21 1 21 2 2
1 2 1 2
(0) (0) (0)10 (1 )(20 2 ) 2 2
K K Kx x x
K K K K
[6.32]
Para minimizar o valor de J e encontrar o valor de 1K e 2K faz-se
1
J
K
=2
0J
K
21 2 2
11 2
( 2 )(2 2 ) (0)
(2 2 )
J K K Kx
K K
221 2 1 1 2
2 121
(2 )(1 )(20 2 ) 2( )(1 )(0)
(20 2 )
K K K K KK x
K
21 1 1
1 221
2 (10 ) ( )(0) (0)
(10 )
K K Kx x
K
2
21 2 1 2 122 2
2 1
2 (1 )(20 2 ) (1 )2( )(0)
(1 ) (20 2 )
K K K K Kx
K K
[6.33]
Como todos os termos devem ser nulos, escolhe-se por simplicidade
o coeficiente de 1 2(0) (0)x x , lembrando que para qualquer coeficiente escolhido o
valor de K1 seria o mesmo, então:
2
1 1 12
1
2 (10 ) ( )0
(10 )
K K K
K
[6.34]
O que fornece a seguinte equação do segundo grau:
21 120 0K K [6.35]
Obtendo:
2
1
20 20 4
2K
[6.36]
Como 1K deve ser positivo temos:
1 10 100K [6.37]
Que representa a mesma equação (5.19) encontrada anteriormente
Da mesma forma calcula-se2
J
K
como sendo:
-
34
2
J
K
2 2 222 1 2 2 1 2 1 2 112
2
( 20 2 )(2 2 ) 2( 10 10 )(0)
(2 2 )
K K K K K K K K Kx
K
221 1
1 121
( )(20 2 )(0)
(20 2 )
K KK x
K
2 2 21 1 2 2 222 2 2
2 1 2
(20 2 )( ) 2 (2 2 ) 2( )(0)
(1 ) (20 2 ) (2 2 )
K K K K Kx
K K K
[6.38]
2
J
K
2 2 2 222 1 2 1 2 1 2 1 1
1 122 2 1
( 10 ) 2( 10 10 ) ( )(0)
1 (2 2 ) 20 2
K K K K K K K K KK x
K K K
2 2
21 2 222 2
2 1 2 2
( ) 2( )(0)
(1 ) (20 2 ) 1 (2 2 )
K K Kx
K K K K
[6.39]
Novamente igualando qualquer coeficiente da equação (6.39) a zero
para obter k2, e escolhendo por exemplo o segundo termo de 22 (0)x temos:
2 2
1 2 22 2
2 1 2 2
( ) ( )2 0
(1 ) (20 2 ) (1 ) 4(1 )
K K K
K K K K
[6.40]
Multiplicando por 2(1 )K em ambos os lados temos:
2 21 2
2 21
( ) ( )(1 ) 0
2(10 ) 2
K KK K
K
[6.41]
Rearranjando encontra-se a seguinte equação do segundo grau:
2 21 2 1 2 1 1(10 ) (20 2 ) ( 10 ) 0K K K K K K [6.42]
Substituindo 1 2.15K tem-se:
2 22 212.15 2 12.15 (2.15 10 2.15 ) 0K K [6.43]
Resolvendo para 2K tem-se:
2 2
2
2 12.15 (2 12.15) 4(12.15 ( (2.15 10 2.15 )))
2(12.15)K
[6.44]
Como 2K não pode assumir valores negativos desconsideramos o
sinal negativo do segundo termo. Rearranjando a equação tem-se:
-
35
22 2
2
12.152 12.15 4 12.15 4 (2.15 12.15 )
12.15
2(12.15)K
[6.45]
2
2
2.151 1
12.15K
[6.46]
Substituindo 47.61 e 10.70 temos:
2 3K [6.47]
Novamente encontra-se o mesmo valor 2K conforme obtido
anteriormente na equação (5.33).
Note que a expressão obtida para 2K em (6.47) é diferente da
encontrada na equação (5.19), mas, no entanto, fornece o mesmo valor.
Assim mostra-se que realmente os valores de 1 2.15K e 2 3K
minimizam o projeto de LQR.
-
36
CONCLUSÃO
Este trabalho apresentou uma técnica de controle que minimiza o
índice de desempenho quadrático selecionado. Este controle por sua vez é definido
como ótimo, e pode também ser obtido pelo método de alocação de pólos de malha
fechada desejados, desde que sejam respeitadas as condições matemáticas do
projeto LQR.
Mesmo que o projeto de controle ótimo através do uso de alocação
de polos não tenha fornecido valores de K1 e K2 que proporcionam respostas da
saída do motor da cadeira próximas ao ideal, pode-se, mesmo assim realizar
simulações tendo como base os valores obtidos teoricamente e a partir deles
encontrar a melhor curva que se ajuste ao projeto proposto. Pois como foi mostrado
algebricamente, a alocação de polos se restringe a uma certa faixa de valores finita,
ou seja, escolhendo-se um valor de te=2s encontra-se um intervalo de em que a
alocação de pólos fica bem definida matematicamente.
Provavelmente, o ponto mais importante é que o projeto baseado no
índice de desempenho resulte em um sistema de controle estável com a obtenção
do vetor de controle u(t).
Para finalizar, mostrou-se também que através da diferenciação do
índice de desempenho J, é possível para quaisquer condições inclusive condições
iniciais das variáveis de estado 1(0)x e 2(0)x , obter um sistema de controle ótimo.
-
37
REFERÊNCIAS BIBLIOGRÁFICAS
[1] OGATA, Katsuhiko. Engenharia de controle Moderno. 4ª Ed. São Paulo,
Pearson Prentice Hall, 2003.
[2] ESPINOSA, F. et al. Advanced and Intelligent Control Techniques Applied to the
Drive Control and Path Tracking Systems on Robotic Wheelchair, Electronics
Department, University of Alcalá, 2001.
[3] MAZZO M. at al. Electronic Control of a Wheelchair Guided by Voice Commands,
Electronics Department, University of Alcalá, 2000.
[4] Sobrinho, Prado, Felizardo, Germanovix, Gaino, Sistemas de Controle para
Cadeira de Rodas Comandados por Sopro e Sucção, Universidade Estadual de
Londrina/ DEEL: Departamento de Engenharia Elétrica, 2003 SBAI.
[5] Matrizes hermitianas e unitárias. Disponível em: http://www.nacad.ufrj.br/
~amit/alglin/aula7.pdf
[6] Matriz definida positiva. Disponível em: http://wiki.ued.ipleiria.pt/wikiEngenharia/
index.php/Matriz_definida_positiva.
[7] Formas quadráticas Disponível em: http://www.isa.utl.pt/dm/algebra/
material_apoio /teorico/fq_t.pdf
-
38
APÊNDICE
APÊNDICE A
-
39
Matrizes Definidas Positivas
Uma matriz simétrica A de ordem nxn é definida positiva se para
qualquer vetor tem-se a relação
0Tx Ax
em que Tx Ax é sempre real.
A matriz A é definida positiva se todos os seus autovalores são
maiores que zero.
A matriz A é semi-definida positiva se pelo menos um autovalor é
zero e os outros são positivos.
Exemplo:
2 1
1 2A
det(A-λI)= 2 4 3 0
Tem-se 1 3 e 2 1 , logo a matriz A é definida positiva
9
Julio estefano a. rosa filho
contribuições de controle ótimo
Londrina
2011
julio estefano a. rosa filho
contribuições de controle ótimo
Trabalho de Conclusão de Curso apresentado ao Curso de Graduação em Engenharia Elétrica da Universidade Estadual de Londrina como requisito parcial da conclusão do curso.
Orientador: Ruberlei Gaino
Londrina
2011
julio estefano a. rosa filho
contribuições de controle ótimo
Trabalho de Conclusão de Curso apresentado ao Curso de Graduação em Engenharia Elétrica da Universidade Estadual de Londrina como requisito parcial da conclusão do curso.
BANCA EXAMINADORA
____________________________________
Prof. Ruberlei Gaino
Universidade Estadual de Londrina
____________________________________
Prof. Márcio Roberto Covacic
Universidade Estadual de Londrina
____________________________________
Prof. Osni Vicente
Universidade Estadual de Londrina
Londrina, 24 de outubro de 2011.
Dedico este trabalho a meus pais Julio Rosa e Marilene Serpeloni Rosa, que sempre me incentivaram a ir em frente e não desistir do curso.
AGRADECIMENTOS
A Deus pela saúde e perspicácia que tive durante todos esses anos de curso.
À minha família, pais, irmã, irmão, que sempre ficaram do meu lado, me fortalecendo para vencer mais essa etapa de minha vida.
Aos meus colegas da faculdade de Matemática, e principalmente aos colegas da Engenharia Elétrica que me serviram como exemplo para concluir o curso.
Ao meu orientador, Ruberlei Gaino, pelo seu apoio, orientação, dedicação e o incentivo que me deu durante esse trabalho.
Ao professor Osni Vicente que além de contribuir com o conhecimento acadêmico, também passou suas experiências de vida.
Ao professor Túlio que me auxiliou durante o projeto de iniciação científica.
Ao professor Ulisses que sempre estava pronto para ajudar a qualquer dificuldade que eu pudesse ter.
Ao professor Mangili por ser meu orientador de estágio, e pelo conhecimento e experiências passados.
À professora Bernadete por estar sempre presente durante todo o nosso curso, e principalmente por ter me auxiliado no primeiro ano de engenharia com os aproveitamentos de disciplinas realizadas no curso de matemática.
RESUMO
A partir de um modelo real pré-definido de um sistema de cadeira de rodas controlada por sopro e sucção, será realizada uma análise de técnicas de controle por meio de um controlador ótimo quadrático. O trabalho visa desenvolver e alcançar modelos de controles que possam oferecer aos deficientes físicos uma locomoção com segurança e ao mesmo tempo oferecer uma melhor qualidade de vida. Os procedimentos baseiam-se em análises, condições matemáticas e simulações computacionais utilizando o software Matlab.
Palavras-chave: Cadeira de Rodas, Índice de desempenho, análise matemáticas, simulações.
abstract
From a real model of pre-defined system of a wheelchair controlled by blowing and sucking, there will be a technical analysis of control by means of a quadratic optimal controller. The work aims to develop and achieve control models that can provide the disabled with a mobility and safety while offering a better quality of life. The procedures are based on analysis, computer simulations and mathematical conditions using the Matlab software.
Key words: Wheelchair, performance index, analysis, mathematical simulations.
LISTA DE ILUSTRAÇÕES
Figura 1 – Solução global de um sistema de cadeira de rodas10
Figura 2 – Sistema de controle da cadeira de rodas25
Figura 3 – Curva dos motores R e L considerando V=1 e Omega=026
Figura 4 – Curva dos motores R e L considerando V=0 e Omega=127
Figura 5 – Curva dos motores R e L considerando V=0 e Omega=028
Figura 6 – Gráfico da resposta do sistema para e 28
Figura 7 – Gráfico da resposta do sistema para e 29
SUMÁRIO
1- INTRODUÇÃO.........................................................................................................09
2- MODELO DE UM CONTROLE DE CADEIRA DE RODAS COM TÉCNICAS DE CONTROLE INTELIGENTES E AVANÇADA.............................................................10
3- SISTEMAS REGULADORES QUADRÁTICOS ÓTIMOS.......................................12
3.1- Conceitos de controle LQR...........................................................................12
4- REPRESENTAÇÃO DA FUNÇÃO DE TRASNFERÊNCIA DO MOTOR DA CADEIRA DE RODAS................................................................................................16
4.1-Encontrando as Raízes do Sistema.................................................................17
4.2 -Matriz de Controlabilidade...........................................................................17
5- CONTRIBUIÇÕES DE CONTROLE.......................................................................18
5.1 -Determinação do Ganho K e Minimização do Índice de Desempenho J........18
5.2-Encontrando e Pelo Método de Alocação de Pólos.......................20
5.3- Obtenção da Matriz Q por meio de e ................................................24
5.4-Simulações e Resultados...............................................................................25
5.4.1-Análise das Curvas de Saída dos motores em resposta ao degrau unitário......................................................................................................................25
6-ANÁLISE DO ÍNDICE DE DESEMPENHO J ATRAVÉS DA MATRIZ DE GANHO K................................................................................................................................30
CONCLUSÃO............................................................................................................36
REFERÊNCIAS BIBLIOGRÁFICAS.........................................................................37
APÊNDICE................................................................................................................38
APÊNDICE A- Matrizes Definidas Positivas..........................................................39
1- INTRODUÇÃO
Atualmente são muitas as organizações no mundo que estão interessadas em desenvolver cadeiras de rodas capazes de recuperar as habilidades perdidas e restrições devido à deficiência física.
Com o recente avanço tecnológico, muitas das pessoas portadoras de deficiência já podem agora ocupar e ter sua capacidade profissional parcialmente restabelecida.
Graças a avanços na aplicação de técnicas de controle inteligente para o controle da movimentação e sistemas de rastreamento de trajetória em cadeiras de rodas, até mesmo pessoas com alto grau de deficiência podem ter uma qualidade de vida melhor. (adaptado de Sobrinho (2003) e Mazzo (2000)).
O projeto aqui apresentado é baseado no desenvolvimento e análise de um controle ótimo u(t), descrito segundo uma formulação em variáveis de estado.
O projeto deve ser baseado na minimização de um índice de desempenho definido aqui como .
Usando a técnica conhecida por controle ótimo quadrático, e através da equação no espaço de estados definida por deve se encontrar um possível vetor de controle u(t) que trasfira o estado para a região do espaço de estados desejada e para o qual o índice de desempenho seja minimizado.
2-MODELO DE UM CONTROLE DE CADEIRA DE RODAS COM TÉCNICAS DE CONTROLE INTELIGENTES E AVANÇADAS.
O diagrama de blocos da Figura 1 apresenta uma visão de como seria uma solução global de um controle aplicado a uma cadeira de rodas inteligente.
Figura 1- Solução global de um sistema de cadeira de rodas (adaptado de (Spinosa et. al., 2001)).
Resumidamente as principais vantagens deste projeto (adaptado de Spinosa et.al.,2001) são:
1-Controle adaptativo com uma linha de identificação de parâmetros do bloco da trajetória-motor-tacômetro que permite o controle ser atualizado para responder a mudanças nas condições de operação, tais como transporte de cargas e suas distribuições no veículo, assimetria e rugosidade do chão.
2-O controle ótimo permite que limitações de projeto, como máximo nível elétrico de entrada e saída que movem o motor, passem a ser inclusos na teoria de controle, possibilitando melhorar o comportamento do sistema de controle de feedback.
3-O controle ótimo adaptativo, projetado corretamente, permite que as duas vantagens anteriores possam ser incorporadas. Assim os parâmetros do projeto envolvidos na teoria de controle são atualizados de acordo com a linha de mudanças detectadas.
4-Erros de orientação no rastreamento da trajetória são corrigidos com um controle ótimo que estabelece os valores apropriados para a velocidade angular do veículo.
5-A velocidade linear V do veículo é calculada por meio do controle fuzzy de acordo com a distância a percorrer e o raio de curvatura do caminho estabelecido.
6-Os itens 4 e 5 contribuem para reduzir o risco de derrapagem.
O sistema conta ainda com sensores de posicionamento global (infravermelho e ultra-sônico) que proporcionam duas importantes melhorias:
1- Adaptar o controle de movimento da inércia dos usuários, às limitações físicas dos motores elétricos e com as características do piso.
2-Permitir orientação autônoma caso o usuário sofra de um alto grau de deficiência, de forma que somente os pontos iniciais e finais precisam ser indicados à cadeira de rodas.
A solução encontrada concentra-se na incorporação de técnicas avançadas e inteligentes de controle digital que melhoram as características da cadeira.
O veículo é caracterizado por um sistema de tração diferencial com duas rodas traseiras e duas dianteiras livres.
O sistema de locomoção funciona com um motor de corrente contínua de imã permanente.
A estratégia de orientação autônoma é suportada pelos seguintes subsistemas: a) captura do ambiente, b) interface usuário cadeira, c) integração de multi-sensores, geração de trajetória e caminho, d) controle dos atuadores de movimento.
As variáveis envolvidas no controle são: velocidade angular da roda direita ωr e velocidade angular da roda esquerda ωl, posições x-y e orientação da cadeira no sistema de referência cartesiana, e as velocidades linear V e angular Ω.
3-SISTEMAS REGULADORES QUADRÁTICOS ÓTIMOS
Em projetos de sistemas de controle automático, é desejável que o projeto atinja o desempenho operacional desejado para determinada situação. Em sistemas de controle ótimo esse desempenho pode ser formulado diretamente em termos de índices de desempenho no domínio do tempo. Exemplos típicos a serem citados são o valor máximo de ultrapassagem e o tempo de subida da resposta para uma entrada em degrau.
Os sistemas que são ajustados de modo a proporcionar um índice de desempenho mínimo são freqüentemente chamados de sistemas de controle ótimo. Segundo OGATA, (2003):
“Embora o controlador possa em muitas aplicações práticas, não ter nada a ver com a ‘característica ótima’, o ponto importante é que o projeto baseado no índice quadrático de desempenho resulte em um sistema de controle estável”.
Neste trabalho será considerado o projeto de um sistema de controle ótimo descrito segundo uma formulação em variáveis de estado e um sinal de controle ótimo u(t), de modo que o desempenho do sistema seja otimizado.
3.1 Conceitos de controle LQR
Conforme a teoria desenvolvida em OGATA, (2003), o controle LQR, conhecido como controle ótimo quadrático apresenta a vantagem de que o sistema a ser projetado sempre será estável exceto no caso em que o sistema não seja controlável.
Através de um estado inicial qualquer, o problema do regulador ótimo é encontrar o vetor u(t) que realize a transferência de um estado para outra região do espaço de estado desejada. O desempenho desejado pode ser formulado diretamente em termos de índices de desempenho no domínio do tempo. Os sistemas que são ajustados de modo a fornecer um índice de desempenho mínimo são frequentemente chamados de sistemas de controle ótimo.
Considere-se agora um sistema de controle definido da seguinte forma:
[3.1]
Onde, x= vetor de estado (n-dimensional)
u=vetor de controle (r-dimensional)
A=matriz constante (nxn)
B=matriz constante (nxr)
Será escolhido um controlador com retroação de modo que u seja alguma função das variáveis de estado x, em conseqüência:
u(t)=-Kx(t) [3.2]
É possível encontrar a matriz K do vetor de controle ótimo.
Ao projetar o sistema de controle, é interessante escolher o vetor de controle u(t) de modo que um dado índice de desempenho seja minimizado.
[3.3]
Onde
Q=matriz hermitiana definida positiva ou real simétrica
R=é uma matriz hermitiana definida positiva ou real simétrica
O papel da matriz Q e R é definir o peso relativo que o estado e o sinal do controle têm no cálculo do critério J. As matrizes Q e R determinam o consumo de energia dos sinais de controle.
Para encontrar a otimização desejada é necessário substituir a equação (3.2) na (3.1) obtendo:
[3.4]
Considerando que a matriz A-BK seja estável, substituindo agora a equação (3.2) na (3.3) tem-se:
[3.5]
[3.6]
Para obter o valor mínimo de J será assumido e postulado da existência de uma equação diferencial exata tal que:
[3.7]
Onde P é uma matriz hermitiana definida positiva a ser determinada.
Sem perda de generalidade será usada uma matriz simétrica P, P12=P21 para simplificar o tratamento algébrico.
Do lado direito da equação (3.7) temos:
[3.8]
[3.9]
Comparando as duas equações e para que a igualdade seja verdadeira devemos ter que:
[3.10]
Se A-BK for uma matriz estável, então existirá uma matriz definida positiva P que satisfaça à equação (3.10).
Assim devemos apenas determinar os elementos da matriz P a partir da equação (3.10). Como o sistema é estável sempre existirá uma matriz P positiva que satisfaça a equação (3.10).
Portanto se resolvermos a equação (3.10) e encontrarmos uma matriz positiva P, o sistema será estável.
O índice de desempenho é calculado por:
[3.11]
Para o cálculo do limite superior da integral de J em t=∞ temos que.
Obtendo assim,
[3.12]
Portanto o índice de desempenho pode agora ser calculado em termos da condição inicial x(0) e P.
Supondo agora que R seja uma matriz hermitiana definida positiva ou real simétrica, onde
[3.13]
Onde T é uma matriz não singular. Então temos da equação (3.10):
[3.14]
Que pode ser reescrita como:
[3.15]
Para J ser minimizado em relação a K devemos minimizar a expressão
, em relação a K.
O mínimo ocorre quando ela é zero ou quando
[3.16]
Isolando K temos:
[3.17]
A expressão (3.17) fornece a matriz ótima K
Assim o índice de controle é dado por:
[3.18]
A matriz P deve satisfazer a seguinte equação reduzida:
[3.19]
A equação (3.19) é denominada equação reduzida de Riccati.
4-REPRESENTAÇÃO DA FUNÇÃO DE TRANSFERÊNCIA DO MOTOR DA CADEIRA DE RODAS
Neste trabalho será considerado um projeto de um sistema de controle ótimo descrito segundo uma formulação em variáveis de estado. No caso de Mazzo (2000) e Spinosa (2001), eles identificaram uma função de primeira ordem do motor CC.
Para nosso projeto de controle é possível supor que a função de transferência de segunda ordem para o motor DC da cadeira de rodas seja dada por:
[4.1]
Considerando ainda, segundo OGATA, (2003), que uma função de transferência possa ser representada por:
[4.2]
A representação dessa função no espaço de estados na forma canônica controlável é obtida por:
[4.3]
e
[4.4]
Portanto para a função (4.1):
[4.5]
[4.6]
4.1-Encontrando as Raízes do Sistema
Para encontrar as raízes do sistema fazemos:
[4.7]
Como as partes reais das raízes são negativas, o sistema é estável.
4.2 -Matriz de Controlabilidade
Segundo OGATA, (2003) um sistema será dito controlável no instante se for possível, por meio de um vetor de controle, transferir o sistema de qualquer estado inicial para qualquer outro estado, em um intervalo de tempo finito. A controlabilidade tem o papel importante no projeto de sistemas de controle no espaço de estados, é ela quem dita a existência de uma solução completa para um problema.
Por definição, para saber se o sistema é controlável é necessário calcular a matriz de controlabilidade por:
[4.8]
Se det (C) for diferente de zero, o sistema é controlável
No sistema em estudo a matriz de controlabilidade será dada por:
[4.9]
Como det (C)=-1 , temos que o sistema é controlável.
Com as matrizes A e B é possível escrever as equações no espaço de estado.
5-CONTRIBUIÇÕES DE CONTROLE
Neste capítulo será utilizada a equação de Riccati para obter a matriz de ganho K, em função da matriz Q.
Para isso será analisada qual a melhor matriz Q que pode ser utilizada neste projeto. Primeiramente utilizando a equação de Riccati, será analisada qual a faixa de valores que podem ser aceitos para compor os elementos da matriz Q.
Através do sinal de controle , será montado um projeto com um controle ótimo, que por sua vez utilizará a técnica de projeto LQR. O objetivo é encontrar a matriz de modo a minimizar o índice de desempenho
. [5.0]
5.1 -Determinação do Ganho K e Minimização do Índice de Desempenho J
Considerando que as matrizes Q e R da equação (3.19) sejam dadas por:
e R=1 [5.1]
Através da equação reduzida de Riccati, (OGATA, 2003), tem-se que:
[5.2]
Inserindo os valores das matrizes,
[5.3]
[5.4]
[5.5]
Obtém-se as seguintes equações:
[5.6]
[5.7]
[5.8]
De (5.6)
[5.9]
Como e constituem os elementos da matriz de ganho K, estes por sua vez deverão serem positivos.
Para que seja positivo deve-se ter:
[5.10]
[5.11]
De (5.8) temo-se que:
[5.12]
Substituindo (5.9) em (5.12):
[5.13]
[5.14]
Para que seja positivo deve-se ter:
[5.15]
[5.16]
Conforme OGATA, (2003) a matriz de ganho K é dada por:
[5.17]
[5.18]
[5.19]
A equação característica desse sistema é dada por:
[5.20]
[5.21]
[5.22]
[5.23]
[5.24]
Para que o sistema seja estável deve-se ter que as raízes de tenham partes reais negativas, ou seja:
[5.25]
[5.26]
Substituindo o valor de , equação (5.19) na equação (5.26) tem-se:
[5.27]
[5.28]
Resumindo:
Para a matriz Q ser positiva deve-se ter, e .
Para positivo
Para positivo
Para o sistema ser estável deve-se ter
Portanto, quaisquer valores de α e β maiores que zero poderão ser escolhidos para o projeto.
5.2-Encontrando e Pelo Método de Alocação de Pólos
Através dos resultados obtidos anteriormente serão analisadas quais as conseqüências para a realização de um projeto com alocação de pólos, e sua viabilidade.
Para o nosso projeto adotaremos como tempo de amortecimento o valor de te=2s e iremos avaliar quais os valores ou faixa em que o coeficiente de amortecimento viabiliza a obtenção de K1 e K2 para a realização do projeto por meio de alocação de pólos.
Em projetos normais, dada as especificações de desempenho calcula-se através da equação (5.29) o valor do coeficiente de amortecimento:
[5.29]
Encontrado o valor do coeficiente de amortecimento é possível obter então a freqüência natural não amortecida por meio da equação do tempo de acomodação (5.30), levando em consideração o critério de 2%.
[5.30]
Substituindo os valores de acordo com o desejado para o tempo de acomodação e o valor obtido para o coeficiente de amortecimento, obtém-se a freqüência natural não amortecida.
Com isso chega-se aos pólos dominantes em malha fechada, que pode ser expressos pela seguinte equação:
[5.31]
Para o nosso projeto, conforme encontrado anteriormente tem-se pela equação (5.24) que o valor de é dado por:
[5.32]
Comparando as equações (5.31) e (5.32) obtém-se da primeira igualdade que:
[5.33]
Da segunda igualdade temos que:
[5.34]
[5.35]
[5.36]
Da equação (5.36) vemos que é função somente de , e através dessa mesma equação obtém-se a primeira condição para a alocação de pólos, no projeto LQR, pois deve-se ter que:
[5.37]
ou
[5.38]
Isolando da equação (5.30) e substituindo na equação (5.38) tem-se:
[5.39]
[5.40]
[5.41]
Pela equação (5.19) tem-se ainda que é dado por:
[5.42]
Rearranjando essa equação temos:
[5.43]
Para que seja positivo e não gere valores negativos para deve-se ter que:
[5.44]
Substituindo a equação (5.33) em (5.44)
[5.45]
Pela equação (5.19) pode-se escrever que:
[5.46]
Substituindo (5.46) em (4.45)
[5.47]
Substituindo agora a equação (5.36) em (5.47) e rearranjando tem-se:
[5.48]
Essa equação do segundo grau nos fornece os seguintes valores de :
[5.49]
Para que assuma valores reais deve-se ter ainda que:
[5.50]
ou que
[5.51]
Pela equação (5.48) o coeficiente de será negativo, portanto a equação do segundo grau terá sua concavidade voltada para baixo, assim para a equação (5.48) ser positiva deve-se ter que:
[5.52]
Substituindo e considerando somente o intervalo de , tem-se:
[5.53]
Portanto tem-se:
[5.54]
Para um valor de tem-se:
[5.55]
Pelas equações (5.41), (5.51) e (5.55) tem-se que o intervalo apropriado para é dado por:
[5.56]
Portanto para realização da alocação de pólos deve-se tomar o cuidado na escolha do tempo de amortecimento, e do máximo valor de ultrapassagem. Esse tipo de método quando aplicado para o controle ótimo quadrático, fornece alguns valores que são incompatíveis com o projeto, portanto devem ser analisados previamente.
Mostra-se através de simulações com o controle da figura 2, pag. 26, que o melhor valor para com uma escolha de , que proporciona uma melhor resposta de saída ao degrau de entrada, é o valor de .
Com esses valores, e encontra-se que
[5.57]
Substituindo na equação (5.36) tem-se:
[5.58]
Pela equação (5.33) tem-se:
[5.59]
Através da equação (5.29) tem-se que o máximo valor de ultrapassagem é dado por:
[5.60]
5.3- Obtenção da Matriz Q por meio de e
Através do método de Riccati, os valores encontrados de e na matriz de ganho da equação (5.19) são dados por:
[5.61]
[5.62]
Substituindo o valor de na equação (5.61) obtém-se o valor de
. [5.63]
Da mesma forma inserindo o valor de na equação (5.62) obtém-se um valor de:
[5.64]
Com esses valores em mãos, é possível montar a matriz Q que será dada por:
[5.65]
Como é maior que temos que o sistema apresentará também uma resposta um pouco mais rápida.
5.4-Simulações e Resultados
Para se chegar ao melhor valor de e para o projeto prático, serão realizadas algumas simulações para o valor de e.
A idéia é levantar experimentalmente algumas curvas de resposta de saída do motor em função da aplicação de um degrau unitário na figura 2, descrita a seguir.
5.4.1-Análise das Curvas de Saída dos motores em resposta ao degrau unitário
O sistema de controle da cadeira de rodas é representado pelo seguinte diagrama de blocos:
Figura 2- Sistema do controle da cadeira de rodas (adaptado de Sobrinho (2003) e Mazzo (2000))
Experimentalmente foi obtido que um valor de fornece um ganho e . Com esses valores ao se aplicar um degrau nas entradas V e Ohm da figura 2, obtém-se os seguintes gráficos para a resposta de saídas dos motores direito e esquerdo:
Considerando V=1 e Ohm=0, os motores da direita e da esquerda andam em linha reta.
Figura 3- Curva dos motores R e L considerando V=1 e Ohm=0
Para V=0 e Ohm=1 os motores apresentam curvas opostas fazendo a rotação da cadeira de rodas.
Figura 4- Curva dos motores R e L considerando V=0 e Ohm=1
Para V=0 e Ohm=0 os motores ficam parados.
Figura 5- Curva dos motores R e L considerando V=0 e Omega=0
Para se ter uma idéia da influência de na obtenção da matriz Q e K e conseqüentemente na resposta de saída dos motores, foram feitas duas simulações para um bem próximo ao encontrado anteriormente.
Nas duas simulações, foram consideradas apenas a resposta para o motor da direita.
Figura 6 - Gráfico da resposta do sistema para e
Pela figura 6 vemos que para maior que 0.573 a resposta de saída do motor se estabiliza um pouco abaixo do valor 1.
Figura 7-Gráfico da resposta do sistema para e 0
De forma semelhante à análise feita anteriormente se diminuirmos o valor de teremos que a resposta de saída do motor ao degrau de entrada se estabiliza acima do valor 1. Nota-se que apenas variações de décimos de centésimos em já proporcionam uma diferença considerável no valor de saída.
6-ANÁLISE DO ÍNDICE DE DESEMPENHO J ATRAVÉS DA MATRIZ DE GANHO K
Neste capítulo apresenta-se uma análise de como se obter a minimização do índice de desempenho através da diferenciação da função de J em relação a e . Com isso ao encontrar a função de J minimizada, encontra-se os valores de e com valores ótimos.
Para isso considerando as mesmas matrizes do projeto proposto anteriormente:
, , , [6.1]
Utilizando um procedimento parecido ao OGATA, 2003 até a equação (6.15) formulam-se os seguintes resultados:
Considerando agora a seguinte equação no espaço de estado:
[6.2]
e o seguinte sinal de controle:
[6.3]
Para o projeto LQR deve-se encontrar a matriz de forma a minimizar o índice de desempenho:
[6.4]
Fazendo (6.3) em (6.2)
[6.5]
[6.6]
Fazendo agora (6.3) em (6.4) obtém-se: