inetmatica del robot metodos geometrico y mth

of 16
-
Upload
isaac-aquino -
Category
Documents
-
view
214 -
download
0
Transcript of inetmatica del robot metodos geometrico y mth
-
8/15/2019 inetmatica del robot metodos geometrico y mth
1/16
UNIVERSIDAD CATOLICA DE SANTA MARIAFACULTAD DE CIENCIAS E INGENIERIAS FISICAS Y
FORMALES.ESCUELA PROFESIONAL DE INGENIERIA MECANICA,
MECANICA ELECTRICA Y MECATRONICA
ING JUAN CARLOS CUADROS MACHUCA11 de mayo de 2016
GUIA DE PR CTICA N° 6CINEMÁTICA DEL ROBOT
PCD– MÉTODOS GEO y MTH ROBOTICA I
PRESENTADO POR:
ISAAC AQUINO CUTI
ROBERTH MACHACA GALLEGOS
-
8/15/2019 inetmatica del robot metodos geometrico y mth
2/16
1
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
GUIA DE PRÁCTICA N° 6CINEMÁTICA DEL ROBOT
PCD MÉTODOS GEO y MTH ROBOTICA I
Contenido1. OBJETIVO................................................................................................................ 2 2. MARCO TEÓRICO...................................................................................................... 2 3. MATERIALES............................................................................................................. 4 4. DESARROLLO DE LA PRÁCTICA. ...................................................................................... 5 5. CUESTIONARIO. ...................................................................................................... 15
6. CONCLUSIONES. ..................................................................................................... 15 7. BIBLIOGRAFÍA. ........................................................................................................ 15
-
8/15/2019 inetmatica del robot metodos geometrico y mth
3/16
2
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
1 Objetivo
I.1. Resolver el problema cinemático directo de robots articulares por metodologíasgeométricas y por medio de matrices de transformación homogéneas.
2 Marco teórico
Cinemática Directa
Se utiliza fundamentalmente el álgebra vectorial y matricial para representar y describir la localizaciun objeto en el espacio tridimensional con respecto a un sistema de referencia fijo. Dado que un robpuede considerar como una cadena cinemática formada por objetos rígidos o eslabones unidos entremediante articulaciones, se puede establecer un sistema de referencia fijo situado en la base del robodescribir la localización de cada uno de los eslabones con respecto a dicho sistema de referencia.
De esta forma, el problema cinemático directo se reduce a encontrar una matriz homogénea detransformación T que relacione la posición y orientación del extremo del robot respecto del sistema referencia fijo situado en la base del mismo. Esta matriz T será función de las coordenadas articulare
-
8/15/2019 inetmatica del robot metodos geometrico y mth
4/16
3
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
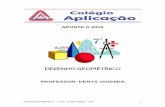
Cadena cinemática. Conjunto de elementos rígidos unidos por articulaciones.
Numeración de elementos (enlaces) y articulaciones: Elementos. Desde 0 hasta n, empezando en la b(elemento 0). Articulaciones. Desde 1 hasta n.
-
8/15/2019 inetmatica del robot metodos geometrico y mth
5/16
4
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
Parámetros Cinemáticos
Parámetros de Enlace
Eje articular. Línea en el espacio alrededor de la cual el enlace i rota referido al enlace i-1.Longitud del enlace (a i-1). Distancia entre los ejes articulares i e i-1.Número de líneas que definen la longitud:
Ejes paralelos: ∞ Ejes no paralelos: 1Signo: positivo
Ángulo del enlace (α i-1). Ángulo medido entre los ejes articulares i e i-1. Proyección sobre plano.
Signo: Regla de la mano derecha
3 Materiales Una PC con SO Windows XP y MATLAB
-
8/15/2019 inetmatica del robot metodos geometrico y mth
6/16
-
8/15/2019 inetmatica del robot metodos geometrico y mth
7/16
6
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
[ ]
[ ]
=
[ ][ ][
]
[
]
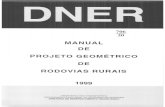
clear all , close all ,clc disp( 'PROBLEMA IV.1' ) disp( 'Por el metodo geometrico se tiene: ' ) disp( 'x=L1*cos(q1)+L2*cos(q1+q2)' ) disp( 'y=L1*sin(q1)+L2*sin(q1+q2)' ) disp( ' ' ) %dando valores a L1 y L2 L1=1 L2=1 figure(1) for q1=0:0.1:pi %q1 por ser considerado un servomotor tiene comomaximo un giro de 180°
for q2=0:0.1:pi %q2 por ser considerado un servomotor tiene comomaximo un giro de 180°
x=L1*cos(q1)+L2*cos(q1+q2); y=L1*sin(q1)+L2*sin(q1+q2); plot(x,y, '*b' ) hold on end
end title( '\it Localizaciones alcanzables por el robot(Geometrico).' ) grid on
-
8/15/2019 inetmatica del robot metodos geometrico y mth
8/16
7
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
disp( 'Por MTH se tiene: ' ) T=rotsym( 'z' , 'q1' )*trasym( 'L1' , '0' , '0' )*rotsym( 'z' , 'q2' )*trasym( 'L2' ,'0' , '0' )*rotsym( 'z' , 'q3' ); disp(T) disp( ' ' ) disp( 'Entonces:' )
disp( 'x=L2*(cos(q1)*cos(q2) - sin(q1)*sin(q2)) + L1*cos(q1)' ) disp( 'y=L2*(cos(q1)*sin(q2) + cos(q2)*sin(q1)) + L1*sin(q1)' ) figure(2) for q1=0:0.1:pi %q1 por ser considerado un servomotor tiene comomaximo un giro de 180°
for q2=0:0.1:pi %q2 por ser considerado un servomotor tiene comomaximo un giro de 180°
x=L2*(cos(q1)*cos(q2) - sin(q1)*sin(q2)) + L1*cos(q1); y=L2*(cos(q1)*sin(q2) + cos(q2)*sin(q1)) + L1*sin(q1); plot(x,y, '*b' ) hold on end
end title( '\it Localizaciones alcanzables por el robot(MTH).' ) grid on
-
8/15/2019 inetmatica del robot metodos geometrico y mth
9/16
8
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
IV.2 Se tiene un robot RR en 2 dimensiones como el de la figura. Resuelva el PCD, usando MTH.Si además se tiene una cámara relacionada con el sistema de referencia base mediante la matrizRO T CA, determinar (y razonar) los valores de las variables del robotθ1 yθ2 para alcanzar un objetodetectado por la cámara en el punto rCA = (0.25, 0.25, 0), con L1 = L2 = 1.
Resolver el problema por Métodos Geométricos y contrastar los resultados con los obtenidos por el
método de las MTH. Dibujar la localización espacial del robot en las circunstancias planteadas en eproblema.
Por el método geométrico:
-
8/15/2019 inetmatica del robot metodos geometrico y mth
10/16
9
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
Por MTH:
Programa en Matlab:
% Modelo cinemático mediante MTHclc, clear all , close all ;
syms L1 L2 th1 th2 A01=trotz(th1)*transl(L1,0,0); A12=trotz(th2)*transl(L2,0,0); A02=A01*A12; T=simplify(A02); disp( 'T=' ); disp(T); x=T(1,4); y=T(2,4); z=T(3,4); disp( 'x=' ); disp(x); disp( 'y=' ); disp(y); disp( 'z=' ); disp(z);
Resultado:
T=[ cos(th1 + th2), -sin(th1 + th2), 0, L2*cos(th1 + th2) + L1*cos(th1)][ sin(th1 + th2), cos(th1 + th2), 0, L2*sin(th1 + th2) + L1*sin(th1)][ 0, 0, 1, 0][ 0, 0, 0, 1]
x=L2*cos(th1 + th2) + L1*cos(th1)
y=L2*sin(th1 + th2) + L1*sin(th1)
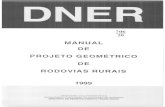
z=0Visualización gráfica de los puntos de la trayectoria que recorre el efector final del robot RR (convalores de longitud L1 = L2 = 1), cuando las dos variables rotacionalesθ 1 y θ 2 varíanuniformemente de 0 a pi/2:
Programa en Matlab
%Graficando el espacio de trabajo del robot clear all L1=1; L2=1; figure(3) for teta1=0:0.1:pi %teta1 por ser considerado un servomotortiene como maximo un giro de 180°
for teta2=0:0.1:pi %teta2 por ser considerado un servomotortiene como maximo un giro de 180°
x=L1*cos(teta1) + L2*cos(teta1+teta2);y=L1*sin(teta1) + L2*sin(teta1+teta2); plot(x,y, '*r' ) hold on end
end title( 'Trayectoria que recorre el robot RR (Para L1 = L2 = 1)' ) grid on
-
8/15/2019 inetmatica del robot metodos geometrico y mth
11/16
10
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
Resultado:
Determinar los valores deθ1 yθ2 para alcanzar un objeto detectado por la cámara en el punto rCA =(0.25, 0.25, 0), con L1 = L2 = 1.
-
8/15/2019 inetmatica del robot metodos geometrico y mth
12/16
11
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
{
{
( )
() () () ()
() ( )
-
8/15/2019 inetmatica del robot metodos geometrico y mth
13/16
-
8/15/2019 inetmatica del robot metodos geometrico y mth
14/16
13
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
Representación esquemática:
Por el método geométrico:
-
8/15/2019 inetmatica del robot metodos geometrico y mth
15/16
14
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
Por MTH:
0 T 3 = 0 T 1* 1 T 2* 2 T 3
0 T 1
1 T 2
2 T 3
0 T 3
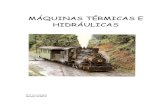
Determinar los límites mínimo y máximo de los actuadores
- Servomotores de 180º- Movimiento máximo por articulación: 180º
%------------------PROBLEMA IV.3-------------------- clear all L1=10; L2=10; L3=10; figure(4) for q1=0:0.2:pi %q1 por ser considerado un servomotor tiene comomaximo un giro de 180°
for q2=0:0.2:pi %q2 por ser considerado un servomotor tienecomo maximo un giro de 180°
for q3=0:0.2:pi %q3 por ser considerado un servomotortiene como maximo un giro de 180°
r=L2*cos(q2)+L3*cos(q2+q3); x=r*cos(q1); y=r*sin(q1); z=L1+L2*sin(q2)+L3*sin(q2+q3); plot3(x,y,z, '.r' ) hold on
end end
end xlabel( ' x ' ); ylabel( ' y ' ); zlabel( ' z ' ); title( 'Volumen de trabajo del robot' ) grid on
-
8/15/2019 inetmatica del robot metodos geometrico y mth
16/16
15
G U I A
D E P R
Á C T I C A N ° 6
C I N E M
Á T I C A D E L R O B O T
P C D
– M
É T O D O S G E O y
M T H | 1 1 / 0 5 / 2 0 1 6
5 Cuestionario
V.1. Realice todo el procedimiento anteriormente descrito y presente en un informe detallael desarrollo de todos los pasos indicados.
6 Conclusiones
Para encontrar el modelo cinemático directa de un robot, se utilizan los métodos geométricolos métodos basados en cambios de base MTH.
El extremo del robot es el punto objetivo en el cual se basa todo el cálculo, ya sea utilizandométodo geométrico o el método por matrices de rotación.
Para usar el método de MTH se tiene que tomar en cuenta el orden al multiplicar las matricde rotación o traslación.
En el caso de los robots que tengan más de tres grados de libertad, es necesario utilizar método de Denavit Hartenberg, porque realizarlos mediante el método geométrico o el métod
MTH resultaría muy complejo.
7 Bibliografía http://www.kramirez.net/Robotica/Material/Presentaciones/Cinematica
DirectaRobot.pdf http://www.esi2.us.es/~vivas/ayr2iaei/CIN_ROB.pdf
http://www.kramirez.net/Robotica/Material/Presentaciones/CinematicaDirectaRobot.pdfhttp://www.kramirez.net/Robotica/Material/Presentaciones/CinematicaDirectaRobot.pdfhttp://www.kramirez.net/Robotica/Material/Presentaciones/CinematicaDirectaRobot.pdfhttp://www.kramirez.net/Robotica/Material/Presentaciones/CinematicaDirectaRobot.pdfhttp://www.kramirez.net/Robotica/Material/Presentaciones/CinematicaDirectaRobot.pdfhttp://www.kramirez.net/Robotica/Material/Presentaciones/CinematicaDirectaRobot.pdf