Funcionalização de superfícies de silício por radiação ... · A implantação iónica anulou...
75
Funcionalização de superfícies de silício por radiação laser e implantação iónica: Estudo da molhabilidade Bruno Miguel Fernandes Nunes Dissertação para obtenção do Grau de Mestre em Engenharia de Materiais Júri Presidente: Doutor Luís Manuel Guerra da Silva Rosa Orientador: Doutor Rogério Anacleto Cordeiro Colaço Co-Orientador: Doutor Eduardo Jorge da Costa Alves Vogais: Doutora Benilde de Jesus Vieira Saramago Doutora Ana Paula Valagão Amadeu do Serro Novembro 2008
Transcript of Funcionalização de superfícies de silício por radiação ... · A implantação iónica anulou...

Funcionalização de superfícies de silício por radiação laser e
implantação iónica: Estudo da molhabilidade
Bruno Miguel Fernandes Nunes
Dissertação para obtenção do Grau de Mestre em
Engenharia de Materiais
Júri
Presidente: Doutor Luís Manuel Guerra da Silva Rosa
Orientador: Doutor Rogério Anacleto Cordeiro Colaço
Co-Orientador: Doutor Eduardo Jorge da Costa Alves
Vogais: Doutora Benilde de Jesus Vieira Saramago
Doutora Ana Paula Valagão Amadeu do Serro
Novembro 2008

ii
Agradecimentos
Durante estes últimos seis meses foram várias as pessoas que contribuiriam e ajudaram na
elaboração desta tese.
Começo por expressar o meu mais sincero e profundo agradecimento ao Professor Rogério
Colaço, orientador desta tese, pela oportunidade concedia e por todo o apoio manifestado desde o
primeiro dia, por toda a sua disponibilidade e incentivo que tornaram esta tese uma realidade. Por ter
estado sempre presente, e ter estendido sempre a sua mão em todos os momentos, mesmo nos mais
difíceis. Por tudo isto obrigado.
Quero também agradecer ao co-orientador desta tese Doutor Eduardo Alves, por ter
apadrinhado o meu mini estágio no ITN, por todo apoio, pela disponibilização de recursos adequados
para a obtenção de resultados importantes para o desenvolvimento desta tese, e por todo o tempo
dispendido no esclarecimento de dúvidas.
À Doutora Ana Paula Serro, por todas as horas dispendidas no auxílio das medições de
molhabilidade, por todos os seus bons conselhos, pela sua sinceridade, boa disposição, paciência e
por todo o incentivo e palavras de coragem que ajudaram a ultrapassar os momentos mais difíceis.
À Professora Benilde Saramago, pelo interesse e incentivo manifestados, pela
disponibilização do seu laboratório e dos seus recursos sem os quais não era possível a elaboração
da presente tese.
Ao Doutor e amigo Vítor Oliveira, por todo o apoio, por todo o tempo dispendido no
esclarecimento de dúvidas, por nunca ter negado um pedido de ajuda, por todo o auxílio prestado na
fase inicial deste projecto e excelentes discussões cientificas que ajudaram na elaboração do
presente trabalho.
Ao Sérgio Graça, por todo o apoio dado desde o primeiro dia, pelas suas longas sessões de
esclarecimento de AFM, Photoshop, Office etc. Por todo o incentivo e por todos os seus bons
conselhos
Ao Sérgio Magalhães pelo apoio dado durante o mini estágio no ITN, por ter ajudado a minha
integração nesse centro de excelência de investigação, pelas longas horas de discussão que me
ajudaram a perceber melhor certos conceitos físicos e certas técnicas experimentais.
Aos meus colegas de curso e amigos, a quem eu quero agradecer todo o apoio e palavras de
incentivo, não só respectivos a estes últimos seis meses, mas também durante todo o meu percurso
académico.
Aos meus pais e irmão, por terem estado lá sempre que necessitei, e por todo o seu incentivo
e pelas palavras de coragem.
Por fim, quero também agradecer à FCT a disponibilização de recursos, e pela oportunidade
de ter integrado o projecto PTDC/CTM/68142/2006 – “NANOFFAWN – Funcionalização, atrito adesão
e desgaste à escala nanométrica”

iii
Resumo
Superfícies de silício funcionalizadas por radiação LASER e implantação iónica foram
investigadas para solucionar um dos actuais problemas tribológicos associados ao funcionamento
dos MEMS/NEMS: adesão por capilaridade. A caracterização das superfícies funcionalizadas foi
realizada com base em ensaios de molhabilidade, espectroscopia de fotoelectrões (XPS),
espectrometria de retrodispersão de Rutherford (RBS), microscopia de força atómica (AFM) e
microscopia de electrónica de varrimento (SEM). A texturização de superfícies de silício com LASER
iniciou-se com optimização dos parâmetros do LASER, de forma a obter amostras com dimensões
adequadas para ensaios de molhabilidade. Estudos de molhabilidade sobre as superfícies texturadas,
já optimizadas, indicaram valores de ângulo de contacto compreendidos entre 90 – 130º após limpeza
com ácidos. Todavia, verificou-se que estes valores não se mantinham constantes com tempo,
sofrendo uma redução de 30-40% um mês após processamento. Análises de XPS mostraram um
crescimento da camada de óxido, que conduz a uma alteração dos valores do ângulo de contacto. A
análise RBS revelou que o processamento LASER diminui a qualidade cristalina das amostras
processadas. Através da implantação iónica de Silício (Si+) em silício não possibilitou a obtenção de
ângulos de contacto superiores a 80º. A implantação iónica anulou em parte o efeito da texturização
das amostras, reduzindo ângulos de contacto de 120º para aproximadamente 80º. Através de RBS foi
possível verificar que o processo de implantação iónica induz a formação de uma camada amorfa à
superfície com uma espessura aproximada de 213 nm, o que poderá estar na origem da redução dos
ângulos de contacto.
Palavras-Chave: Texturização LASER, Molhabilidade, Implantação Iónica, Silício.

iv
Abstract
Functionalized silicon surfaces by LASER irradiation and ion implantation were investigated in
order to solve one of major tribological issues of MEMS/NEMS: capillarity adhesion. The
characterization of the surfaces was based on various techniques like wettability measurements,
photoelectron spectroscopy (XPS), Rutherford backscattered spectrometry (RBS), atomic force
microscopy (AFM) and scanning electron microscopy (SEM). The LASER texturing of the silicon
surfaces was initiated with the optimization of LASER parameters, in order to have samples with
proper dimensions to make wettability measurements. Wettability measurements done on samples
produced by the optimized parameters revealed contact angles between 90 – 130º after the cleaning
treatment with acids. However these values did not maintain constant with time: one month later the
values decreased 30 – 40 %. XPS analysis revealed that oxide the native oxide layer keeps growing
after the cleaning process, influencing the contact angle values. RBS analysis showed that the
crystallinity quality of the samples decreased with LASER processing. By means of ion implantation of
Si+ into silicon, contact angles never raised above 80º. In fact LASER textured samples submitted to
ion implantion revealed a reduction of contact angle from average 120º to approximately 80º. The
implantation seemed to have decreased the effect of laser texturing on the contact angles. RBS
analysis showed that the process of implantation induced an amorphous surface layer of
approximately 213 nm, which could explain this fact.
Key Words: LASER Texturing, Wettability, ion implantation, Silicon.

v
Índice Agradecimentos ........................................................................................................................................ ii
Resumo ................................................................................................................................................... iii
Abstract .................................................................................................................................................... iv
Índice ........................................................................................................................................................ v
Lista de Figuras ....................................................................................................................................... vi
Lista de Tabelas ...................................................................................................................................... ix
Lista de Abreviaturas ............................................................................................................................... ix
Capítulo I – Introdução ............................................................................................................................ 1
1.1 MEMS/NEMS ................................................................................................................................. 1
1.2 Problemas Tribológicos dos MEMS ............................................................................................... 3
1.3 Abordagens Utilizadas para Eliminação dos Problemas dos MEMS de Silício – Visão Global .... 4
1.4 Texturização de superfícies de silício com radiação LASER pulsada – revisão bibliográfica ...... 6
Capítulo II - Materiais e Técnicas Experimentais .................................................................................. 11
2.1 Materiais ...................................................................................................................................... 11
2.2 Técnicas de processamento ........................................................................................................ 11
2.2.1 LASER de Femtosegundo de Ytérbio ................................................................................... 11
2.2.2 Implantação Iónica ................................................................................................................ 13
2.3 Técnicas de Caracterização ........................................................................................................ 16
2.3.1 Microscopia Electrónica de Varrimento ................................................................................ 16
2.3.2 Microscopia de Força Atómica .............................................................................................. 18
2.3.3 Ensaios de Molhabilidade ..................................................................................................... 20
2.3.3.1 Teoria da Molhabilidade ................................................................................................. 20
2.3.3.2 Efeito da Rugosidade no Ângulo de Contacto ............................................................... 21
2.3.3.3 Medição de Ângulos de Contacto .................................................................................. 22
2.3.3.4 Procedimento de Limpeza .............................................................................................. 24
2.3.4 Espectroscopia de Fotoelectrões .......................................................................................... 25
2.3.5 Espectrometria de retrodispersão de Rutherford .................................................................. 26
2.3.5.1 Canalização Iónica ......................................................................................................... 30
Capítulo III - Resultados e Discussão ................................................................................................... 32
3.1 Processamento de amostras de silício por LASER ..................................................................... 32
3.1.1 Optimização de Parâmetros de Processamento por LASER. .................................................. 32
3.1.1.1 Efeito da Distância ao Foco ............................................................................................ 32
3.1.1.2 Efeito da Velocidade ....................................................................................................... 34
3.1.1.3 Efeito da Potência .......................................................................................................... 35
3.1.1.4 Efeito da Sobreposição Entre Varrimentos .................................................................... 36
3.1.1.5 Efeito da Utilização do Diafragma .................................................................................. 37
3.1.1.6 Efeito da Variação da Potência com Diafragma ............................................................. 38
3.1.1.7 Efeito da Variação da Distância ao Foco Diafragma...................................................... 39

vi
3.1.1.8 Efeito da Velocidade com Diafragma ............................................................................. 39
3.1.1.9 Conclusão ....................................................................................................................... 40
3.1.2 Texturização de Superfícies de Silício por laser com Parâmetros Optimizados. ................. 41
3.1.2.1 Condições Experimentais ............................................................................................... 41
3.1.3 Implantação Iónica ................................................................................................................ 47
3.2 Medidas de Molhabilidade ........................................................................................................... 48
3.2.1 Efeito do processamento por LASER e da implantação iónica ............................................ 48
3.2.2 Efeito do Envelhecimento ..................................................................................................... 51
3.3 Resultados de Espectrometria de Superfícies ............................................................................ 54
3.3.1 Espectroscopia de fotelectrões ............................................................................................. 54
3.3.2 Espectrometria de Retrodispersão de Rutherford ................................................................ 57
Capitulo IV - Conclusões e Trabalho Futuro ......................................................................................... 60
4.1 Conclusões .................................................................................................................................. 60
4.2 Trabalho a Realizar no Futuro ..................................................................................................... 61
Referências ........................................................................................................................................... 62
Lista de Figuras Figura 1. (a) Comparação de tamanho entre uma micro engrenagem de um micro motor com um grão
de pólen e um conjunto de células de glóbulos vermelhos coaguladas [3], (b) micro engrenagem
constituído por 6 elementos [3]. .............................................................................................................. 1
Figura 2. (a) Microestrutura da flor de Lótus, (b) microestrutura obtida por litografia (soft lithography),
adaptado [21] ........................................................................................................................................... 5
Figura 3.Micrografias (inclinadas 45º) de silício processado com laser de ArF, exibindo a evolução de
formação de colunas desde a formação de depressões (a) até fase final (f), adaptada de [37]. ........... 8
Figura 4. (a) Estruturas obtidas em atmosferas de N2-O2, (b) Estruturas obtidas com em atmosfera de
SF6, adaptada de [38] ............................................................................................................................. 9
Figura 5. Esquema simplificado de formação de feixe LASER, adaptada de [40] ............................... 11
Figura 6. Representação esquemática do processo de emissão estimulada, [41]............................... 12
Figura 7. Esquema experimental utilizado no processamento LASER. ............................................... 13
Figura 8. Representação esquemática da variação do poder de paragem electrónico Se e nuclear Sn
em função da energia reduzida, adaptada de [52] ................................................................................ 14
Figura 9. Esquema de um microscópio electrónico de varrimento (SEM), adaptada de [55] ............... 16
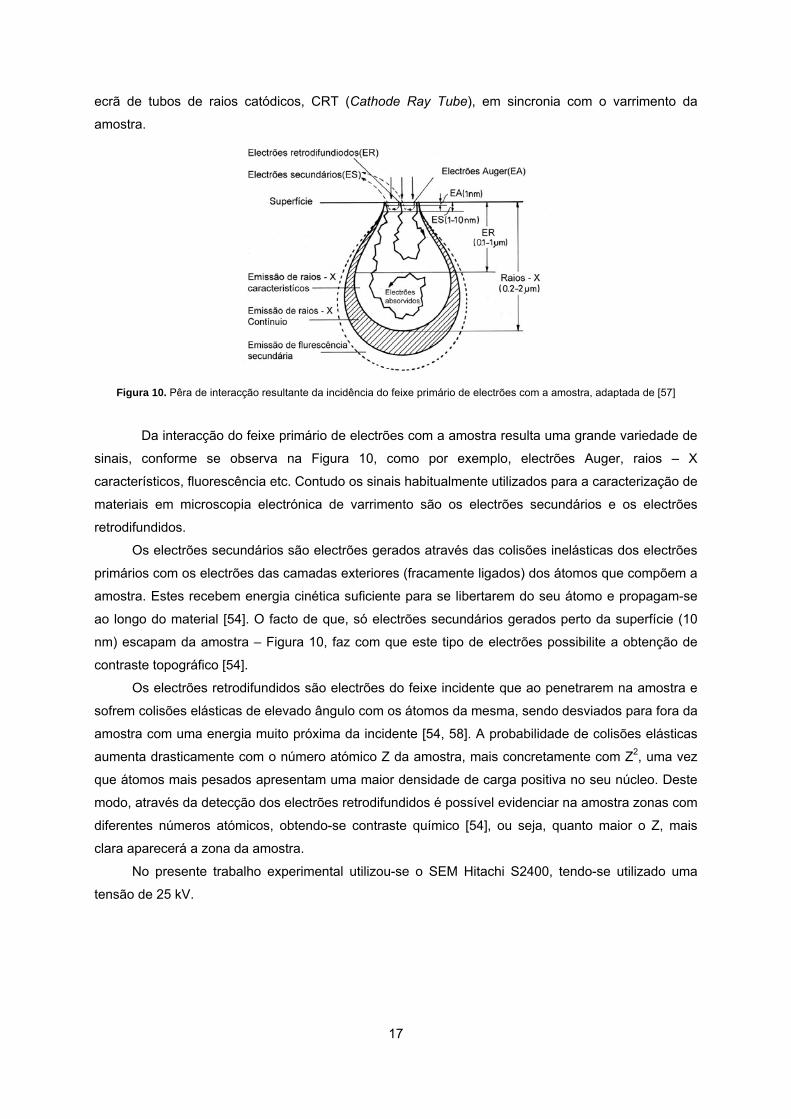
Figura 10. Pêra de interacção resultante da incidência do feixe primário de electrões com a amostra,
adaptada de [57] .................................................................................................................................... 17
Figura 11. Esquema de funcionamento do microscópio de força atómica, [60] ................................... 18
Figura 12. Variação das forças interatómicas (forças de van der Waals) com a distância da ponta em
relação à amostra, [60] .......................................................................................................................... 19
Figura 13. Ângulo de contacto de equilíbrio entre um líquido e uma superfície sólida ideal, [63] ........ 20
Figura 14. Superfície hidrofílica (a) θ<90º, superfície hidrofóbica (b) θ>90º, [63] ................................. 21

vii
Figura 15. (a) Forma da gota segundo o modelo de Wenzel (b) forma da gota segundo modelo de
Cassie-Baxter, adaptado de [66] ........................................................................................................... 21
Figura 16. Esquema experimental de medição ângulos de contacto, adaptado de [68] ...................... 23
Figura 17. Diagrama esquemático do processo de XPS, fotoionização de um átomo por remoção de
um electrão 1s, [77] ............................................................................................................................... 25
Figura 18. Esquema representativo de um espectrómetro de fotoelectrões, [79] ................................ 26
Figura 19. Representação esquemática da trajectória de uma partícula no seio de um dado alvo. .... 28
Figura 20. Representação esquemática do efeito de canalização de uma partícula α, ........................ 30
Figura 21. Variação da distância da amostra ao LASER com energia 700 µJ, 100 impulsos e
frequência de 1 kHz. a)56.500 µm, b)56.000 µm, c)55.500 µm, d)55.000 µm, e)54.500 µm, f)51.000
µm, g)50.500 µm, h)50.000 µm, i)49.500 µm j)49.000 µm k)48.500 µm l)47.500 µm. ......................... 33
Figura 22. Micrografias de SEM dos varrimentos efectuados com diferentes velocidades a)500 µm/s,
b)500 µm/s inclinada 45º, c)250 µm/s, d)100 µm/s ............................................................................... 34
Figura 23. Varrimentos com diferentes potências a)770 mW, b)580 mW, c)490 mW, d)Três
varrimentos sucessivos com 490 mW. .................................................................................................. 35
Figura 24. Variação da distância entre varrimentos a)50 µm, b) 100 µm, c)150 µm, d)200 µm .......... 36
Figura 25. Varrimentos com diferentes distâncias entre os mesmos a)45µm, b)ampliação da figura a)
inclinada 45º, c)75 µm, d)ampliação da figura c), e)100 µm, f)125 µm ................................................ 37
Figura 26. Varrimentos efectuados com diferentes potências e distância constante de 75 µm a) 590
mW b) 688 mW c)790 mW d)2.505 W com frequência de 10 kHz ....................................................... 38
Figura 27. Varrimentos efectuados com variação da velocidade a)450µm/s. b)200µm/s. ................... 39
Figura 28. Efeito da velocidade com diafragma, para valores inferiores a 200 µm/s, (a) 150 µm/s,
(b)100 µm/s, (c)160 µm/s, (d)190 µm/s ................................................................................................. 40
Figura 29. Observação dos dois tipos de rugosidade, tipo A e B, para diferentes condições
experimentais, (a) e (b) amostra A1 obtida com velocidade de 500 µm/s, e (c) e (d) amostra produzida
com 200 µm/s. ....................................................................................................................................... 42
Figura 30. Variação da potência durante os varrimentos da amostra A2, (a) zona de menor potência,
(b) zona de maior potência. ................................................................................................................... 43
Figura 31. Imagem de AFM da amostra A1 (a) imagem 3D, (b) Imagem de 5x5µm2 correspondente a
uma ampliação da Figura (a). ............................................................................................................... 44
Figura 32. Perfis de altura da Figura 31(cima) Segundo a direcção da rugosidade do tipo A, (abaixo)
Segundo uma direcção perpendicular à rugosidade do tipo A. ............................................................ 44
Figura 33. (a) Imagem de AFM 3D da amostra A3 15x15 um2, representativa das restantes amostras,
(b) imagem de AFM 10x10µm2 ampliada da Figura(a) ......................................................................... 45
Figura 34. Perfis de altura da Figura 33(b) (a) segundo a direcção da rugosidade do tipo B, (b)
segundo a direcção da rugosidade do tipo A. ....................................................................................... 45
Figura 35. Micrografia de SEM da amostra processada por laser depois de implantada. ................... 47
Figura 36.Comparação de resultados de ensaios de molhabilidade entre o processo de texturização a
LASER e implantação iónica ao fim de 30 segundos. .......................................................................... 48

viii
Figura 37. Comparação da forma da gota obtida em diferentes amostras (a) amostra virgem (62º), (b)
amostra A4 (120º), (c) amostra A2 após implantação (75º). ................................................................. 49
Figura 38. Variação do ângulo de contacto com tempo para a amostra A3, A4 e A5. ......................... 49
Figura 39. Efeito do tempo sobre as medidas de molhabilidade. ......................................................... 52
Figura 40. Comparação de ângulos de contacto da amostra 6 e amostra lisa obtidas com diferentes
tratamentos ............................................................................................................................................ 53
Figura 41. Espectro de XPS da amostra texturada a LASER limpa com ácidos (a) espectro na gama
dos [95-110] eV, (b) espectro na gama dos [525-540] eV. ................................................................... 54
Figura 42. Espectro de XPS da texturada por LASER e limpa com ácidos um mês antes da análise de
XPS (a) espectro na gama dos [95-110] eV, (b) espectro na gama dos [525-540] eV. ....................... 54
Figura 43. Espectro de XPS da amostra texturada a LASER sem limpeza com ácidos antes dos
ensaios de XPS (a) espectro na gama dos [95-110] eV, (b) espectro na gama dos [525-540] eV. ..... 55
Figura 44. (a) Gota obtida sobre a amostra texturada e analisada em XPS sem ácidos, (b) gota obtida
sobre a amostra texturada e analisda em XPS tratada com ácidos. .................................................... 56
Figura 45. Espectro de retrodispersão de Rutherford de uma amostra virgem obtido com um feixe de 4He+ de 2 MeV de energia .................................................................................................................... 57
Figura 46. Espectro de retrodispersão de Rutherford da amostra 3 processada a LASER obtido com
feixe de 4He+ de 2 MeV de energia ...................................................................................................... 57
Figura 47. Espectro de retrodispersão de Rutherford de uma amostra virgem implantada obtido com
um feixe de 4He+ de 2 MeV de energia ................................................................................................ 58
Figura 48. Espectro de retrodispersão de Rutherford de uma amostra implantada e posteriormente
processada a LASER obtido com um feixe de 4He+ de 2 MeV de energia .......................................... 58

ix
Lista de Tabelas Tabela 1. Texturização de superfícies de silício com radiação LASER pulsada. ................................... 6
Tabela 2. Condições experimentais utilizadas para a realização das amostras em área .................... 41
Tabela 3. Dados experimentais retirados da análise das amostras processadas em área por AFM ... 46
Tabela 4. Identificação dos picos e percentagens atómicas obtidas por XPS. .................................... 55
Lista de Abreviaturas NEMS – Nanoelectricalmechanical Systems.
MEMS – Microelectricalmechanical Systems.
RF – Rádio frequências.
PMMA – Polimetilmetacrilato.
DLC - Diamond like carbon.
SAM - Self assambled monolayers.
LASER - Light Amplification by Stimulated Emission of Radiation.
SEM – Scanning electron microscope.
AFM – Atomic force microscopy.
XPS - X – Ray Photoelectron Spectroscopy.
RBS – Rutherford backscatterd spectroscopy

1
Capítulo I – Introdução
1.1 MEMS/NEMS
Os MEMS/NEMS (Micro/Nanoelectricalmechanical Systems) são sistemas micro fabricados
que apresentam um comprimento característico inferior a 1 mm mas superior a 1 μm, no caso dos
MEMS, e da ordem dos nanómetros no caso dos NEMS. Estes sistemas combinam estruturas
eléctricas e mecânicas e tem diversas funcionalidades [1, 2]: podem ser componentes micro
mecânicos, como por exemplo, micro engrenagens e micro alavancas, ou componentes micro
eléctricos que controlam o movimento ou recolhem informação. Para ter uma ideia do tamanho e da
extrema complexidade dos MEMS observe-se a Figura 1a), onde é possível comparar o tamanho de
uma engrenagem de um micro motor com pólen e células de glóbulos vermelhos. A Figura 1b) mostra
uma engrenagem constituída por 6 elementos.
Figura 1. (a) Comparação de tamanho entre uma micro engrenagem de um micro motor com um grão de pólen e um conjunto
de células de glóbulos vermelhos coaguladas [3], (b) micro engrenagem constituído por 6 elementos [3].
Os primeiros dispositivos micromaquinados surgiram entre a década de 60 e 70, consistiam em
barras/hastes de silício monocristalino que desempenhavam funções de medição de extensão
quando sujeitos a tensão [4]. Com o desenvolvimento das técnicas de produção tornou-se possível a
obtenção de dispositivos mais complexos e aptos para o desempenho de outro tipo de funções.
Actualmente existem vários tipos de MEMS que podem ser classificados em 6 categorias com base
nas suas aplicações. Essas categorias são [5]:
• Sensores: dispositivos desenhados para sentirem alterações no meio ambiente, como por
exemplo, alterações químicas, ópticas, térmicas ou de movimento.
• Actuadores: dispositivos que estimulam e transmitem potência para outros MEMS com base
em estímulos electrostáticos ou térmicos.

2
• MEMS de rádio frequência (RF): transmitem, filtram ou manipulam RF. São dispositivos
constituídos por interruptores de contacto metálico, antenas e filtros ajustáveis.
• MEMS ópticos que reflectem filtram e amplificam luz: normalmente constituídos por
interruptores ópticos e reflectores.
• MEMS de micro fluidos: concebidos para interactuar com sistemas de fluidos. São
constituídos por bombas, válvulas e canais, desenhados com o intuito de transporte, ejecção
e mistura de pequenas quantidades de fluidos.
• BioMEMS concebidos para interactuarem com amostras biológicas: são desenvolvidos para
interagir com proteínas, células biológicas, reagentes médicos, podendo ser usados para
análises médicas in-situ.
Os MEMS/NEMS encontram-se presentes em diversas aplicações: na indústria automóvel são
usados acelerómetros, MEMS do tipo sensor que accionam os air-bags; nas impressoras são usados
MEMS de micro fluidos; MEMS biológicos são usados em reactores para efectuar separação de
células biológicas; MEMS ópticos constituídos por micro espelhos para obtenção de imagens de alta
definição e micro permutadores de calor para arrefecimento de circuitos electrónicos [2].
A indústria dos NEMS/MEMS representa actualmente um valor superior a 1.000 milhões de
euros [6], e estimativas apontam que até ao final desta década o seu valor possa atingir os 100.000
milhões de euros [1].
A tecnologia utilizada no processamento dos dispositivos MEMS e NEMS está relativamente
bem estabelecida. Em geral, baseiam-se na tecnologia dos circuitos integrados, tendo estes
processos sido optimizados para a produção de MEMS/NEMS. O facto da produção dos MEMS ser
baseada na tecnologia de produção de circuitos integrados, possibilita a obtenção de centenas a
milhares de diapositivos micro mecânicos no seu estado final em apenas alguns centímetros de uma
bolacha de silício (micro maquinação de superfície) [7]. Como consequência o silício foi tomado como
material de eleição para o fabrico MEMS e NEMS.
No entanto, o silício, como material, tem diversas limitações, nomeadamente, baixo valor de
módulo de Young, baixo valor de tenacidade à fractura, baixa dureza, coeficiente de atrito elevado,
elevada taxa de desgaste e um elevado valor de energia superficial. Estas propriedades tornam o
silício uma má opção como material para aplicações tribológicas [8]. Como tal, nos últimos anos tem
sido desencadeado um esforço de investigação visando a diminuição (ou eliminação) dos problemas
tribológicos descritos do silício [1]. O presente trabalho enquadra-se nessa linha de investigação e
visa contribuir para a compreensão do efeito da topografia da superfície no comportamento à adesão
capilar do silício.

3
1.2 Problemas Tribológicos dos MEMS
São diversos os mecanismos que podem tornar os MEMS inaptos para o desempenho das
suas funções. Estes mecanismos podem variar desde fadiga, fluência, desgaste, descargas
electrostáticas, delaminação, adesão e contaminação [9]. Todos estes mecanismos são dependentes
do tipo de material utilizado no dispositivo, do meio envolvente e da sua função [9]. Contudo vai se
apenas focar de forma sumária os principais problemas tribológicos subjacentes aos MEMS
constituídos por partes móveis, e que funcionam com base no contacto com outros dispositivos [1].
Os principais problemas tribológicos dos MEMS que funcionam com base no contacto são a
adesão/colagem (stiction), e a força de atrito e o desgaste [1, 7]. Em primeira análise, todos estes
problemas derivam dos efeitos de escala. A elevada razão área - volume, característica destes tipos
de dispositivos, tem como consequência o predomínio das forças de superfície, (forças de Van der
Waals, de capilaridade e electrostáticas) sobre as forças volúmicas ou de inércia que induzem o
movimento do dispositivo. Deste modo, quando duas superfícies microscópicas entram em contacto,
existe uma forte probabilidade de adesão permanente entre as mesmas. Este problema é designado
de colagem (stiction) e pode induzir o colapso das estruturas.
Existem duas categorias de adesão, a adesão de remoção e adesão de funcionamento. A
adesão de remoção pode ocorrer durante a última etapa de fabrico destes dispositivos, em que se
utiliza uma solução química, tipicamente ácido fluorídrico, para a remoção da última camada
sacrificial do dispositivo microestruturado, seguindo-se uma etapa de secagem onde forças de
capilaridade podem emergir devido à natureza hidrófila da superfície [10, 11]. Estas forças são
suficientemente elevadas para induzir colagem do dispositivo com o substrato. Outro tipo de
adesão/colagem, adesão de funcionamento, como o nome indica, ocorre enquanto o dispositivo
desempenha as suas funções, sendo este tipo de adesão o mais crítico.
A força de atrito e o desgaste são outros dois grandes problemas no funcionamento dos
MEMS que operam em modo de contacto. Dispositivos como micro motores, micro engrenagens e
micro bombas não são ainda comercializados devido ao enorme desgaste a que estão sujeitos
subsequente da sua utilização. Concretizando, existem dados da literatura que referem que micro
motores de silício operam somente durante alguns minutos, se não segundos, antes de cessarem o
seu movimento devido a um colapso tribológico [8]: as forças adesivas induzem um aumento da força
de atrito entre as partes que estabelecem contacto, conduzindo a um desgaste excessivamente
rápido dos componentes [11]. Em determinados tipos de micro motores, já foi possível registar
valores de coeficiente de atrito da ordem de 1,1 [1].

4
36 dHAFVdW π
−=
1.3 Abordagens Utilizadas para Eliminação dos Problemas dos MEMS de Silício – Visão Global
Até ao momento foram tentadas duas abordagens diferentes para optimização das
propriedades tribológicas do silício: métodos químicos e métodos físicos [11].
Os métodos químicos consistem no tratamento ou alteração das propriedades químicas das
superfícies. Vários tipos de revestimentos têm sido testados, como por exemplo, revestimentos
poliméricos, como o PMMA (polimetilmetacrilato) e o S8 (uma resina usada geralmente como
photoresist) que apresentam baixos valores de energia de superfície, evitando a adesão dos MEMS
[12]. Outro tipo de revestimento testado são os DLC´s (diamond like carbon). Este tipo de
revestimento apresentam baixo coeficiente de atrito, na ordem de [0,02 – 0,1] baixas taxas de
desgaste, resistência a altas temperaturas, elevada dureza (100 GPa) e módulo de Young (1100
GPa) [1]. Revestimentos do tipo de DLC´s já foram testados em alguns micro motores, tendo-se
verificado um aumento de mais de 300 vezes em termos do número de ciclos, comparativamente a
materiais não revestidos [8]. Contudo é importante realçar que as propriedades deste tipo de filmes
são dependentes da espessura, o que limita a sua aplicação a situações onde não possam ser
usados revestimentos com elevada espessura. [1]. Monocamadas auto-organizadas ou SAM´s (Self
Assambled Monolayers) são outro tipo de revestimentos estudados. Os SAM´s são monocamadas de
compostos orgânicos, tipicamente, organosilanos, que vão conferir à superfície propriedades
hidrofóbicas, eliminando problemas de adesão e colagem por capilaridade. As propriedades destas
monocamadas dependem dos grupos funcionais de que são constituídos e do respectivo
comprimento da cadeia. Certas cadeias podem inclusivamente diminuir a fricção a seco entre
superfícies devido ao baixo valor de energia de superfície [13]. No entanto este tipo de revestimento
tende a ser removido à medida que as superfícies contactam, perdendo-se o seu efeito. Por fim, tem-
se verificado que a implantação de certos iões sobre o silício tem melhorado as suas propriedades
mecânicas e tribológicas à escala nanométrica [14], o que pode também representar uma abordagem
aos problemas tribológicos dos componentes baseados em silício.
Os métodos físicos consistem em efectuar alterações da topografia da superfície. Uma
superfície rugosa poderá reduzir a área de contacto, entre superfícies. Assim sendo, e de acordo com
a Equação 1 em que H é a constante de Hamaker, A é área partilhada entre superfícies e d a
distância entre as mesmas.
Equação 1
Verifica-se que uma redução da área de contacto, A, conduz a uma redução das forças de Van der
Waals.

5
Vários métodos têm sido utilizados para efectuar alterações topográficas, o differential etching
que consiste num ataque químico anisotrópico de superfícies com soluções químicas é um desses
métodos. No entanto não se tem revelado a melhor solução, pois há formação de estruturas com
formas irregulares e fragmentadas que apresentam várias escalas de rugosidade aleatórias, o que
limita a sua aplicação em MEMS [15]. Outro método estudado é a texturização a LASER. Através
deste método é possível não só diminuir a área de contacto entre superfícies devido à formação de
estruturas do tipo cones ou colunas organizadas, como pode conduzir a altercações nas propriedades
de molhabilidade das superfícies tornando-as hidrofóbicas, e diminuindo a componente de
capilaridade da força de adesão [16]. A texturização de superfícies é também possível através da
utilização de feixes de iões. As colisões entre os iões e a superfície originam a remoção de átomos,
sendo possível a obtenção de texturas do tipo ondas ou pontos (dots) [17-19]. Recentemente um
novo método tem sido desenvolvido para induzir rugosidade sobre superfícies. Este método consiste
em revestir as superfícies de silício com polímeros (tipicamente PMMA), processá-los com base em
técnicas litográficas [1, 20, 21] e assim produzir um padrão semelhante ao da flor de lótus (Figura 2a).
Este tipo de revestimento exibe melhores propriedades tribológicas que os revestimentos não
texturados.
Figura 2. (a) Microestrutura da flor de Lótus, (b) microestrutura obtida por litografia (soft lithography), adaptado [21]
a) b)

6
1.4 Texturização de superfícies de silício com radiação LASER pulsada – revisão bibliográfica
O processamento de silício com radiação LASER tem sido objecto de um intenso estudo
desde há mais de uma década. A constatação de que, sobre uma sobre uma superfície de silício é
possível a obtenção de estruturas regulares periódicas do tipo cone/coluna, e percepção de eventuais
aplicações deste tipo de estruturas, por exemplo, aplicações no campo da óptica tais como, aumento
de absorção na gama do comprimento de onda do infravermelho [22], emissão de campo [23], ou
alteração das propriedades de superfície foram alguns dos vários motivos impulsionadores deste
estudo.
A Tabela 1 apresenta um conjunto de trabalhos realizados no processamento de silício com
LASER, onde foram estudados a variação dos mais diversos parâmetros, desde tipo de LASER,
energia de processamento (fluência), número de impulsos e condições atmosféricas de modo a
perceber efectivamente o mecanismo de crescimento e controlo das estruturas obtidas, bem como da
sua morfologia. Tabela 1. Texturização de superfícies de silício com radiação LASER pulsada.
LASER Fluência (J/cm2) Atmosfera Ano Referência
ArF 193nm (23ns) 0,7 - 6 ar 1996 Sánchez et al [24]
ArF 193nm (23ns) 2 ar 1997 Sánchez et al [24]
Ti – Safira 800nm (150 fs) 1 SF6 1998 Her et al [25]
KrF 248nm (25ns) 2,7 – 3,3 HCl, SF6 1999 Lowndes et al [26]
KrF 248nm (34ns) 2 ar 1999 Sánchez et al [27]
Ti – Safira 800nm (150 fs) 1 SF6 2000 Her et al [28]
KrF 248nm (25 ns) 3 O2 2000 Pedraza et al [29]
KrF 248nm (25 ns) 2,7-3,8 O2, SF6 2000 Pedraza et al [30]
KrF 248nm (25 ns) 2,5 He, SF6 2002 Jesse et al [31]
KrF 248 nm (25 ns) 0,5 - 1 He 2003 Pedraza et al [31]
Ti – Safira 800nm (100fs) 0,6 SF6 2003 Shen et al[32]
Ti – Safira 400nm (100 fs) - Água 2004 Shen et al [32]
Ti – Safira 795 nm (190-350 fs) 1,4 - 6 He 2005 Hommes et
al[33] 800nm (100 fs) 0,8 SF6 2006 Tull et al [34]
Ti – safira 800nm (150 fs) 0,17 - 18 SF6 2006 Zorba et al [16]
Ti – Safira 800nm (100 fs) 8 Água 2008 Sheen et al [35]

7
Dos diversos estudos efectuados decorreram diversos modelos de formação de estruturas cónicas e
colunares que podem ser classificados em dois tipos:
• Mecanismo em que o crescimento da coluna/cone é efectuado através da remoção
preferencial da matéria situada na vizinhança do cone.
• Mecanismo em que o crescimento de dos cones/colunas é efectuado através do transporte de
material da base para a extremidade do cone/coluna.
Estes mecanismos diferem na posição das estruturas formadas relativamente à superfície
original. As estruturas do primeiro mecanismo situam-se abaixo da superfície inicial, enquanto as
estruturas do segundo mecanismo se desenvolvem acima da superfície inicial [36].
O primeiro mecanismo, também conhecido por mecanismo de efeito de sombra, considera que
na superfície do material processado existem regiões (impurezas, partículas ou fases) que
apresentam um limiar de ablação superior à fluência utilizada, que actuam como escudo protegendo
o material presente na sua zona inferior, enquanto o material não protegido é removido. Este
mecanismo surgiu para explicar a formação de estruturas em materiais cerâmicos e poliméricos [36],
razão pela qual não será desenvolvido no presente trabalho.
O mecanismo crescimento baseado no transporte de material, por sua vez, explica a formação
de estruturas cónicas/colunares em silício e em outros materiais homogéneos. O mecanismo de
transporte de matéria pode ser dividido em dois mecanismos diferentes: mecanismos hidrodinâmicos
e mecanismo de transporte de massa por vapor.
Os mecanismos hidrodinâmicos foram propostos por Sánchez [24] para explicar a formação
de colunas em silício irradiado com laser de ArF pós várias centenas de impulsos com uma fluência
de compreendida entre 1,5 e 2,5 J/cm2. As estruturas obtidas, colunas, exibiam uma altura de cerca
20 µm acima da superfície inicial, e uma largura da ordem 1 – 2 µm. A teoria de Sánchez foi
consolidada com um trabalho posterior [37]. A superfície inicialmente lisa depois de alguns impulsos,
começa a formar algumas crateras Figura 3a), posteriormente depois de formadas, aumentam o seu
diâmetro com o número de impulsos à medida que se formam novas crateras Figura 3b)c). Com o
aumento do número de impulsos começa a ocorrer concentração de material em alguns pontos
Figura 3d), formando umas protuberâncias que evoluem de seguida para colunas. Segundo Sánchez
e seus colaboradores, a formação das crateras está associada às propriedades térmicas e ópticas do
silício. O coeficiente de absorção do silício para o comprimento de onda utilizado (193 nm) é elevado.
Esta situação faz com que a radiação seja absorvida numa camada superficial muito reduzida, da
ordem dos 10 nm. O calor gerado nesta pequena camada vai gerar uma camada fundida da ordem
dos 0,4-0,7 µm. Como a densidade do silício líquido (2,54 g/cm3) é superior à do silício sólido (2,32
g/cm3), o líquido será sujeito a uma força ascendente. Uma plausível explicação para a formação de
crateras seria o facto da interface sólido - líquido não ser plana, o que resultaria numa variação da
espessura de líquido em determinadas zonas. Enquanto o processo de solidificação decorre, a
interface sólido chega primeiro à superfície nas zonas onde a espessura de líquido é menor. As
zonas em redor solidificam mais tarde permanecendo sobre as zonas que solidificaram inicialmente.

8
A evolução presente entre a Figura 3e) e f) resulta do fluxo de líquido da base para a extremidade do
cone, consequência das forças termo-capilares resultantes de uma distribuição não uniforme da
temperatura, e da força ascensional oriunda da expansão associada à solidificação [37]
Figura 3.Micrografias (inclinadas 45º) de silício processado com laser de ArF, exibindo a evolução de formação de colunas
desde a formação de depressões (a) até fase final (f), adaptada de [37].
O mecanismo de transporte de massa em forma gasosa explica a formação de colunas,
através da deposição na sua extremidade de material removida das zonas entre colunas. Este
mecanismo foi proposto por Pedraza e seus colaboradores [38], após a irradiação de amostras de
silício com laser de KrF em atmosferas controladas de O2 e SF6. Verificaram que para ambas as
atmosferas testadas se obtinham estruturas diferentes - Figura 4, e que as mesmas se desenvolviam
acima da superfície inicial. Em atmosferas de O2 a formação das colunas inicia-se com a formação de
fissuras sobre as superfícies, estas fissuras com aumento do número de impulsos vão se intersectar
e formar depressões ou cavidades. As cavidades passam a ser locais preferenciais de remoção de
silício devido à concentração de radiação (nessas depressões) ocorrendo posteriormente a deposição
do material vaporizado nas extremidades das cavidades, formando pequenos cones que crescem
com número de impulsos. Em atmosferas de SF6 a formação de colunas inicia-se de forma diferente,
nos primeiros impulsos ocorre uma remoção de silício da superfície de forma homogénea, depois
começam-se a formar estruturas do tipo anéis (ondulações) que se intersectam levando à formação
de cones. Tal como no caso anterior o crescimento dos cones estará associado à deposição de
material removido entre as colunas (locais onde haverá concentração de radiação). Em ambas as
situações, apesar da diferença de morfologia existe um factor comum que é a presença de uma ponta
redonda na extremidade, local onde ocorre a deposição. O facto de o processamento ser realizado
com atmosferas de SF6 e O2, facilita a remoção de silício da das zonas entre colunas, concretizando,

9
o SF6 reage com silício durante o processamento formando SiF2 gasoso que se decompõe na
extremidade das colunas, segundo a reacção:
2SiF2(g) → SiF4(g) + Si(s)
No caso do processamento em atmosfera com O2, haverá formação de SiO nos vales e depressões,
sendo a sua deposição na extremidade descrita com base na seguinte equação:
2SiO(g) → SiO2(g) +Si(s)
Figura 4. (a) Estruturas obtidas em atmosferas de N2-O2, (b) Estruturas obtidas com em atmosfera de SF6, adaptada de [38]
Os modelos anteriormente mencionados formam propostos para explicar a formação de
colunas/cones de silício na década de 90, sobre acção de radiação LASER pulsada de nanosegundo.
A presente tese foi desenvolvida com base na texturização de superfícies de silício com radiação de
femtosegundo. Embora as estruturas obtidas por LASER de femto/nanosegundos se assemelhem
entre si, alguns autores apontam que as diferenças nas condições de formação, bem como de
morfologia, indicam que o mecanismo de formação das estruturas é diferente [39]. As estruturas de
silício obtidas sob radiação de femtosegundo tendem a conter a sua ponta (tip) ao nível da superfície,
enquanto as estruturas obtidas sob condições de nanosegundos, tal como vimos nos modelos
anteriormente descritos, tendem a permanecer com as suas pontas (tips) acima da superfície inicial.
Sobre as mesmas condições de experimentais, atmosfera de SF6, as estruturas obtidas com impulsos
de femtosegundo estão cobertas de nanopartículas com dimensões características compreendidas
entre os 10 e 50 nm. As estruturas obtidas com impulsos de nanosegundos, comparativamente às
anteriores, apresentam uma superfície mais lisa contudo é possível a observação de protuberâncias
com dimensões próximas dos 500 nm, que crescem sobre a superfície [39]. O mecanismo de
formação das estruturas sobre condições de impulso de femtosegundo ainda não se encontra
completamente revelado. No entanto, Tull [34] propôs um possível mecanismo geral de formação
para estas estruturas com base na observação da evolução das mesmas em função do número de
impulsos. Segundo este autor a formação das estruturas cónicas encontra-se dividida em duas fases,
fase inicial, correspondente aos primeiros impulsos (no caso observado 10 impulsos), e a segunda
fase correspondente aos impulsos posteriores. Na primeira fase, observa-se a formação de dois

10
padrões na superfície, primeiro, a formação de uma ondulação periódica com comprimento de onde
próximo da do laser e orientada perpendicularmente à polarização do mesmo, estrutura conhecida
por LIPSS (laser induced periodic surface structure), atribuída a fenómenos de interferência entre a
radiação incidente e a radiação dispersa pelos defeitos presentes na superfície. Com o aumento do
número de impulsos, forma-se uma nova ondulação, mais grosseira e que se orienta
perpendicularmente à anteriormente mencionada. As LIPSS desaparecem e a nova ondulação
começa a ser destruída, formando-se uma estrutura de esferas, segunda a direcção da mesma
ondulação, com um comprimento de onda superior ao do LASER. A partir deste ponto o autor
considera a o inicio da segunda fase. Formadas as estruturas do tipo esferas, estas, vão concentrar e
reflectir a radiação para os vales em seu redor, promovendo a ablação de material. À medida que
este processo vai ocorrendo, formam-se estruturas inclinadas, nomeadamente cones. No fim da
evolução, a ponta dos cones começa a ficar mais larga, fruto de alguma deposição de algum do
material ablado sobre a ponta (tip) fundida.
A obtenção de estruturas com LASER´s de nanosegundo também apresenta a formação de
estruturas com ponta arredondada. Mas neste caso, as estruturas crescem acima da superfície inicial,
dando a entender que neste caso o mecanismo de formação dominante é a deposição e crescimento,
enquanto para os LASER de femtosegundo o mecanismo dominante é a ablação.

11
Capítulo II - Materiais e Técnicas Experimentais
2.1 Materiais
No presente trabalho utilizou-se exclusivamente bolachas (waffers) de silício <100>
monocrsitalino dopado do tipo P (Boro), com espessura de 500 ± 50 µm, diâmetro de 100 ± 1 mm e
resistividade eléctrica de 100-50 Ωm.
Para a realização da etapa de limpeza mencionada na secção 2.3.3.4 foram utilizados os
seguintes reagentes: ácido fluorídrico (HF) quimicamente puro 40% (Panreac), ácido sulfúrico
(H2SO4) 95-97% para análise (Merck KGaA) e peróxido de oxigénio (H2O2) para análise 30% (p/v)
(Panreac).
2.2 Técnicas de processamento
2.2.1 LASER de Femtosegundo de Ytérbio
LASER é o acrónimo de Light Amplification by Stimulated Emission of Radiation. O laser
utiliza processos que aumentam ou amplificam sinais de luz depois de estes terem sido gerados por
uma determinada fonte. Estes processos de emissão estimulada, efeito natural explicado por
considerações de equilíbrio termodinâmica, e rialimentação óptica (presente na maioria dos lasers)
são obtido através utilização de espelhos [40] - Figura 5.
Figura 5. Esquema simplificado de formação de feixe LASER, adaptada de [40]
A emissão estimulada de luz consiste num processo quântico necessário para o
funcionamento do laser. A emissão é conseguida através da inversão do estado energético da
população. Uma grande parte dos átomos do meio amplificador vai receber uma determinada
quantidade de energia e são excitados para um estado de energia mais elevado – Figura 6a).

12
áreaPF
.υ=
Figura 6. Representação esquemática do processo de emissão estimulada, [41]
Posteriormente os átomos excitados vão decair para o seu estado fundamental, libertando um
fotão com energia correspondente à diferença entre níveis – Figura 6b). Os átomos que permanecem
no estado excitado na presença dos fotões emitidos pelos seus vizinhos, originados pelo decaimento,
vão ser estimulados a voltar ao seu estado fundamental emitindo um fotão exactamente com as
mesmas características que o fotão que promoveu a estimulação, mesma fase e energia [40, 42]–
Figura 6c). Este fenómeno é designado por emissão estimulada.
O laser utilizado no presente trabalho experimental pertence à família de lasers do estado
sólido. O meio activo deste laser, local onde ocorre o processo de multiplicação de fotões devido à
emissão estimulada, é um cristal de potássio, ytria e óxido de tungsténio (WO4) – KYW (potassium
yttrium tungstate) dopado com ytérbio. O ytérbio exibe uma forte gama de absorção na gama dos 940
a 980 nm, o que apresenta como vantagem a possibilidade de utilização de laser de díodo para o seu
bombeamento. Outra vantagem de utilização de ytérbio como elemento dopante consiste na sua
larga banda de emissão compreendida entre os 1020 e 1100nm.
A Figura 7 representa o esquema experimental utilizado no processamento das amostras com
LASER. O feixe LASER depois de gerado é direccionado para um espelho que o reflecte segundo
uma direcção perpendicular. Antes de incidir sobre a amostra, o feixe é focado por uma lente. O
controlo dos varrimentos sobre as amostras foi realizado através da utilização de uma mesa XYZ, que
possibilitava a movimentação das amostras nas três direcções do espaço (XYZ).
O LASER utilizado na presente tese apresenta um comprimento de onda de 1030 nm,
consiste num LASER pulsado, em que a duração de cada impulso é 600 fs. A frequência utilizada
durante os respectivos processamentos foi 1kHz. A fluência (J/cm2), ou densidade de energia,
consiste na quantidade de energia transferida em cada impulso num dado ponto ou “spot”. A fluência
é função da potência, P, da frequência, υ, e da área transversal do feixe, sendo dada pela seguinte
equação:
Equação 2
A distribuição de energia no laser utilizado é Gaussiana.

13
Figura 7. Esquema experimental utilizado no processamento LASER.
2.2.2 Implantação Iónica
A implantação iónica, tal como o próprio nome indica, consiste em implantar iões de uma
determinada espécie num dado material. Este processo surgiu há mais de 30 anos na indústria dos
semicondutores para efeitos de dopagem, tendo-se tornado numa ferramenta indispensável na
indústria dos circuitos integrados [43]. A implantação é efectuada através de feixes ionizados de
partículas que são acelerados com energias que podem variar entre os keV´s e os MeV´s. Através
deste processo é possível alterar as propriedades de um determinado sólido, por exemplo, alteração
de propriedades tribológicas como o desgaste ou dureza [44-46], biocompatibilidade [47-49], aumento
da resistência à corrosão [50, 51] entre muitas aplicações. A implantação iónica é independente dos
limites de solubilidade química, temperatura e da concentração de dopante presente na superfície
[52].
Durante a interacção de feixe de partículas carregadas com o alvo, podem ocorrer vários
fenómenos que param ou dispersam as partículas incidentes. Os principais são [52]:
• Colisões inelásticas com os electrões de ligação do meio, em que a energia perdida na
colisão é direccionada para a excitação ou ionização de átomos ou moléculas.
• Colisões inelásticas com os núcleos, que podem promover excitações e reacções nucleares.
• Colisões elásticas com os electrões de ligação.
• Colisões elásticas com os núcleos, onde a energia é transferida para as partículas que
absorvem o impacto.
As colisões inelásticas nucleares e elásticas com os electrões desempenham um papel
insignificante na paragem de partículas, comparativamente com as colisões inelásticas com os
electrões (poder de paragem electrónico) e elásticas com os núcleos (poder de paragem nuclear). A
prevalência de um dado mecanismo de paragem, nuclear ou electrónico, é função da energia e
massa da partícula acelerada, bem como da massa atómica do meio.

14
enen dx
dEN
S,
,1
⎟⎠⎞
⎜⎝⎛−=
)()( ESESNdxdE
en +=−
∫ +=
E
en ESESdER
0 )()(
en SSS +=
Para efeitos de cálculo, pode-se definir a secção eficaz de paragem nuclear, Sn e electrónica Se
através da seguinte expressão [52]:
Equação 3
Sendo N a densidade atómica do meio e dE/dx a perda de energia em função da distância. O poder
de paragem total será dado por:
Equação 4
A Figura 8 representa variação de ambos os poderes de paragem em função da energia
reduzida. Através da Figura 8 é possível verificar que para baixas energias (tipicamente na ordem dos
keV´s) predomina o efeito paragem nuclear, enquanto para valores de energias mais elevados (da
ordem dos MeV´s) o poder de paragem nuclear torna-se pouco significativo em relação ao poder de
paragem electrónico.
Figura 8. Representação esquemática da variação do poder de paragem electrónico Se e nuclear Sn em função da energia
reduzida, adaptada de [52]
O regime de energias utilizado para o processo de implantação iónica, tipicamente, obriga-
nos a considerar os dois efeitos paragem. Assumindo que ambos os processos são independentes
entre si, podemos definir a perda de energia por unidade de distância por [52]:
Equação 5
Caso os valores de Sn(E) e Se(E) sejam conhecidos, é possível integrar a Equação 5 e obter o
percurso dos iões implantados [52]
Equação 6
Em que R será a distância média percorrida por uma partícula de energia E, num meio amorfo.

15
⎥⎥⎦
⎤
⎢⎢⎣
⎡
Δ
−−
Δ= 2
2
2)(
exp2
)(p
p
p
i
RRx
RNxNπ
p
iMAX R
NNΔ
=π2
O perfil de concentração em função da distância, resultante do processo de implantação iónica
segue aproximadamente uma distribuição Gaussiana, com valor médio de distância percorrida dos
iões Rp, desvio padrão ΔRp e dose implantada Ni, sendo dado pela seguinte equação [52]:
Equação 7
Em que a concentração máxima de dopagem será dada por [52]:
Equação 8
Na presente tese a implantação iónica foi realizada com incidência normal, com 1015
átomos/cm2 de Si+, tendo-se utilizados dois valores energia diferentes. Na primeira fase utilizou-se
uma energia de 150 KeV e posteriormente 100 KeV. As amostras foram todas implantadas em
simultâneo à temperatura de ebulição do azoto líquido.

16
2.3 Técnicas de Caracterização
2.3.1 Microscopia Electrónica de Varrimento
O microscópio electrónico de varrimento (SEM – Scanning electron microscope) é um dos
mais versáteis instrumentos de análise da morfologia de microestruturas [53]. A utilização de
electrões para obtenção de imagens faz com esta técnica apresente algumas vantagens em relação à
microscopia óptica, nomeadamente, possibilidade de obtenção de imagens tridimensionais (maior
profundidade de campo), elevada gama de ampliações (10-10.000x) e a possibilidade de obter
informação topográfica [54].
O princípio de funcionamento do microscópio electrónico de varrimento encontra-se
esquematizado na Figura 9.
Figura 9. Esquema de um microscópio electrónico de varrimento (SEM), adaptada de [55]
Os electrões são emitidos a partir de um filamento por efeito termiónico ou efeito de campo, e
acelerados por uma diferença de potencial (1 - 50 kV) que se estabelece entre o cátodo (filamento) e
o ânodo - Figura 9. O feixe de electrões formado é focado por um conjunto de lentes condensadoras
que reduzem o feixe de dimensão inicial compreendido entre 10 a 50 µm, para valores da ordem dos
10 a 100 nm [56]. A dimensão final do feixe antes de incidir sobre a amostra é controlada por um
diafragma. Um sistema de bobines de deflexão varre o feixe de electrões sobre a amostra, o sinal
resultante da interacção do feixe com a amostra é utilizado para a reprodução de uma imagem no
17
ecrã de tubos de raios catódicos, CRT (Cathode Ray Tube), em sincronia com o varrimento da
amostra.
Figura 10. Pêra de interacção resultante da incidência do feixe primário de electrões com a amostra, adaptada de [57]
Da interacção do feixe primário de electrões com a amostra resulta uma grande variedade de
sinais, conforme se observa na Figura 10, como por exemplo, electrões Auger, raios – X
característicos, fluorescência etc. Contudo os sinais habitualmente utilizados para a caracterização de
materiais em microscopia electrónica de varrimento são os electrões secundários e os electrões
retrodifundidos.
Os electrões secundários são electrões gerados através das colisões inelásticas dos electrões
primários com os electrões das camadas exteriores (fracamente ligados) dos átomos que compõem a
amostra. Estes recebem energia cinética suficiente para se libertarem do seu átomo e propagam-se
ao longo do material [54]. O facto de que, só electrões secundários gerados perto da superfície (10
nm) escapam da amostra – Figura 10, faz com que este tipo de electrões possibilite a obtenção de
contraste topográfico [54].
Os electrões retrodifundidos são electrões do feixe incidente que ao penetrarem na amostra e
sofrem colisões elásticas de elevado ângulo com os átomos da mesma, sendo desviados para fora da
amostra com uma energia muito próxima da incidente [54, 58]. A probabilidade de colisões elásticas
aumenta drasticamente com o número atómico Z da amostra, mais concretamente com Z2, uma vez
que átomos mais pesados apresentam uma maior densidade de carga positiva no seu núcleo. Deste
modo, através da detecção dos electrões retrodifundidos é possível evidenciar na amostra zonas com
diferentes números atómicos, obtendo-se contraste químico [54], ou seja, quanto maior o Z, mais
clara aparecerá a zona da amostra.
No presente trabalho experimental utilizou-se o SEM Hitachi S2400, tendo-se utilizado uma
tensão de 25 kV.

18
2.3.2 Microscopia de Força Atómica
A microscopia de força atómica (AFM – Atomic Force Microscopy) faz parte de um conjunto
de técnicas que estudam e caracterizam superfícies recorrendo a uma sonda, designadas
microscopias de varrimento por sonda (SPM – Scanning Probe Microscopy). A microscopia de força
atómica surgiu na década de 80, pondo termo à limitação da microscopia de efeito de túnel de
analisar apenas amostras condutoras [59].
O microscópio de força atómica é constituído por três elementos principais -Figura 11: um
piezoeléctrico que se move amostra nas três direcções do espaço (x,y,z) em relação a uma ponta (ou
vice-versa dependendo do modelo do microscópio), uma ponta afiada que interactua com a amostra
na extremidade de um braço e um sistema de detecção da posição do braço.
Figura 11. Esquema de funcionamento do microscópio de força atómica, [60]
A ponta afiada, denominada de tip, com um raio de curvatura compreendido entre os 5 e 40
nm, presente na extremidade do braço/haste designado de catilever, efectua o varrimento sobre a
superfície. Durante este varrimento o braço que contém a ponta vai deflectir alterando a sua posição
inicial, derivado das forças atractivas ou repulsivas que se estabelecem entre a ponta e a amostra. As
deflexões induzidas no braço são medidas através de um feixe LASER que incide sobre o braço e é
reflectido para um fotodetector [59].
A relação entre a distância e a intensidade das forças de van der Waals estabelecidas entre a
ponta e a superfície – Figura 12, permite três modos principais de operação em microscopia de força
atómica, o modo contacto, contacto intermitente e por fim modo de não contacto [61]. O modo de
contacto pode ser classificado como sendo estático, no sentido em que não há oscilação do braço
durante o varrimento. Os restantes modos de operação, não contacto e contacto intermitente há uma

19
oscilação permanente do braço durante o varrimento, pelo que são classificados como modos
dinâmicos.
Figura 12. Variação das forças interatómicas (forças de van der Waals) com a distância da ponta em relação à amostra, [60]
No modo de contacto (força constante), a ponta é colocada a uma curta distância em relação
à superfície. Esta aproximação faz com que haja uma deflexão do braço devido às forças de repulsão
presentes entre a ponta e superfície. Neste modo de imagem o varrimento é efectuado com força
constante. Esta condição é obtida através de um sistema de feedback ligado a um piezoeléctrico, que
corrige a posição em z da ponta sempre que se verifique uma variação da deflexão em relação ao
valor inicial no fotodetector. A variação de sinal dado pelo piezoeléctrico em função da posição (x,y) é
convertida em dados topográficos [59]. Este modo de imagem apresenta como principais vantagens a
possibilidade de medir com uma elevada resolução não só a topografia da superfície, bem como
outras características em simultâneo como a força lateral.
Nos modos dinâmicos, em oposição ao modo anteriormente descrito, o braço oscila
continuamente sobre a superfície. Ao aproximar o braço da superfície a uma distância inferior a 10
nm, vai ocorrer uma diminuição de amplitude de vibração devido à presença de um gradiente de
forças atractivas originado pela superfície. Estabelecida a nova amplitude ou frequência de vibração,
efectua-se o varrimento da superfície mantendo este valor de amplitude constante. Esta condição é
obtida através de um sistema de feedback idêntico ao do modo contacto. Qualquer variação no valor
de amplitude ou frequência detectada pelo fotodetector, faz com que o piezoeléctrico mova a amostra
verticalmente até que se estabeleça novamente o valor de frequência ou amplitude. As imagens
topográficas são obtidas, tal como no modo anterior, através dos deslocamentos verticais em cada
ponto (x,y). As vantagens são uma menor interacção entre a ponta e a superfície, menor desgaste da
ponta e obtenção de imagens de diferença de fase e amplitude.
Na presente tese, utilizou-se um AFM da Veeco, modelo CP-II. As imagens de AFM foram
todas obtidas em modo contacto, com utilização de uma ponta, tip, de silício.

20
SLSVLV γγθγ −=cos
2.3.3 Ensaios de Molhabilidade
2.3.3.1 Teoria da Molhabilidade
Quando uma gota de líquido é colocada sobre uma superfície sólida forma-se uma interface
tripla entre o sólido, o líquido e o vapor, cuja posição de equilíbrio depende das forças associadas às
três tensões interfaciais. A situação encontra-se ilustrada na Figura 13, que mostra uma gota de
líquido (L) sobre uma superfície sólida (S), com o vapor (V) como a terceira fase. O ângulo θ, entre a
superfície sólida e a tangente à superfície do líquido num ponto da linha de contacto com o sólido é
designado de ângulo de contacto [62].
Figura 13. Ângulo de contacto de equilíbrio entre um líquido e uma superfície sólida ideal, [63]
Se a superfície sólida for lisa, plana, homogénea e não deformável, a equação que descreve
o equilíbrio das forças que actuam na linha tripla onde se encontram em simultâneo a fase sólida,
líquida e vapor é:
Equação 9
Esta equação é denominada de equação de Young, sendo LV
γ a tensão superficial do líquido
em equilíbrio com o seu vapor, SV
γ a energia livre superficial do sólido em equilíbrio com o vapor do
líquido e SLγ a tensão interfacial entre o sólido e o líquido [64]. A aplicabilidade da equação de Young
a sistemas reais apresenta algumas limitações, devido ao afastamento das condições de equilíbrio e
pelo facto das superfícies sólidas não serem em geral ideais. Contudo existe a possibilidade de
introduzir correcções empíricas na equação de Young para uma melhor aproximação às condições
reais.
Caso a energia livre superficial do sólido em equilíbrio com o vapor do líquido seja superior à
tensão interfacial entre o sólido e o líquido ( SVγ > SLγ ), na equação de Young, cos(θ) será positivo e
o ângulo de contacto será inferior a 90º - Figura 14a). Nesta situação diz-se que o líquido molha
parcialmente o sólido, obtendo-se uma superfície hidrofílica. A situação inversa ( SVγ < SLγ ) origina

21
θθ coscos rW =
valores de cos(θ) negativos, pelo que o ângulo de contacto nesta situação será superior a 90º. Neste
caso diz-se que o líquido não molha o sólido [65] – Figura 14b), obtendo-se uma superfície
hidrofóbica. Deste modo, o valor do ângulo de contacto θ permite classificar as superfícies quanto à
sua molhabilidade.
Figura 14. Superfície hidrofílica (a) θ<90º, superfície hidrofóbica (b) θ>90º, [63]
2.3.3.2 Efeito da Rugosidade no Ângulo de Contacto
A molhabilidade de uma superfície sólida é afectada por dois factores: a estrutura química da
superfície e a rugosidade. Entre os modelos teóricos que descrevem o efeito da rugosidade no valor
do ângulo de contacto, os mais conhecidos são os de Wenzel (1936) e Cassie-Baxter (1944). A teoria
ou modelo de Wenzel assume que o líquido estabelece contacto com toda a superfície rugosa,
preenchendo as suas depressões – Figura 15a), sendo o aumento do ângulo de contacto originado
pelo aumento da área de superfície associada a uma maior rugosidade.
Figura 15. (a) Forma da gota segundo o modelo de Wenzel (b) forma da gota segundo modelo de Cassie-Baxter, adaptado de
[66]
Segundo Wenzel [67], o ângulo de contacto de equilíbrio entre um líquido e de uma superfície
rugosa θW, é dado pela seguinte expressão:
Equação 10
sendo r o factor de rugosidade definido como a razão entre a área real e a área projectada e θ o
ângulo equivalente medido numa superfície lisa. Dado que r é sempre maior que 1, este modelo
prevê que o ângulo de contacto observado quando um líquido molha uma superfície (θ<90º) vai
decrescer quando essa superfície se tornar rugosa (θW<θ). Da mesma maneira, o ângulo de contacto

22
)cos1(1cos θφθ ++−= SCB
observado quando o líquido não molha a superfície (θ>90º) vai aumentar quando essa superfície se
tornar rugosa (θW>θ) [68].
Em oposição ao modelo anterior, o modelo de Cassie-Baxter [69] assume que o líquido não
molha completamente a superfície rugosa, devido à permanência de ar entre as depressões da
superfície Figura 15b). Neste caso o líquido vai interagir com uma superfície que pode ser
aproximada a um compósito de material do substrato e ar. Segundo esta configuração, o ângulo de
contacto medido numa superfície rugosa é dado por:
Equação 11
Sendo ΦS a fracção de sólido em contacto com o líquido e θ, o ângulo medido numa superfície
equivalente lisa. Quanto mais reduzido for o valor de ΦS, menor vai ser a área de contacto entre o
sólido e o líquido e maiores serão os ângulos de contacto medidos. Uma vez que ΦS é sempre menor
que 1, este modelo ao contrário do anterior prevê sempre um aumento de θCB independentemente do
valor de θ na superfície lisa [70].
As equações de ambos os modelos, Wenzel e Cassie-Baxter, foram deduzidas minimizando a
energia de superfície de gotas hemisféricas depositadas em superfícies rugosas e são usadas na
maioria dos estudos em que se investiga o efeito da rugosidade, visto constituírem aproximações
aceitáveis face aos resultados experimentais [71].
No entanto estes dois modelos prevêem ângulos de contacto diferentes para a mesma
superfície rugosa. Estudos de molhabilidade realizados com superfícies processadas de forma
controlada, com geometria próxima da apresentada na Figura 15 confirmam este facto. As gotas
inicialmente com ângulos de contacto próximos dos previstos por um dos modelos passam a
apresentar ângulos de contacto concordantes com o outro, quando sujeitas a uma acção externa [71,
72]. Segundo Patankar a observação de dois ângulos de contacto diferentes na mesma superfície é
devida à presença de dois estados com energia mínima local que dependem dos parâmetros
geométricos da superfície. Segundo este autor, a forma que a gota adopta na superfície, nem sempre
pode corresponder ao estado mínimo de energia do sistema. A metaestabilidade está associada à
existência de uma barreira energética que, quando ultrapassada, permite o estado de menor energia.
O processo de formação da gota na superfície é muito importante na forma que a gota adopta [66,
72]. O ângulo de contacto correspondente ao estado metaestável é muitas vezes observado quando
as gotas são depositadas de forma suave sobre as superfícies rugosas [71].
2.3.3.3 Medição de Ângulos de Contacto
Existem diversos métodos para a medição de ângulos de contacto estáticos. O método
escolhido no presente trabalho experimental foi o da gota séssil, face à sua simplicidade. O
procedimento para a medição dos ângulos consiste na deposição de uma de uma gota de líquido
sobre a superfície do substrato, colocado na horizontal, determinando-se directa ou indirectamente o

23
⎟⎟⎠
⎞⎜⎜⎝
⎛+=Δ
21
11RR
p LVγ
ângulo de contacto entre as duas fases. No presente trabalho a determinação foi realizada de modo
indirecto. A determinação indirecta do ângulo de contacto baseia-se na equação de Laplace da
capilaridade, que relaciona a forma da gota com a tensão superficial do líquido LVγ .
Equação 12
Esta equação representa a diferença de pressão, ∆p, através da interface gás/líquido, sendo
R1 e R2 os raios de curvatura principais da interface. A equação de Laplace pode ser descrita em
termos de um conjunto de equações diferenciais de 1ª ordem, que dependem da tensão superficial do
líquido, do ângulo de contacto, da aceleração gravítica e por fim da diferença entre densidades da
fase líquida e gasosa. O ajuste teórico de uma curva de Laplace ao perfil de uma gota séssil
observada experimentalmente permite a determinação analítica do ângulo de contacto. Neste caso,
em concreto, o ajuste foi efectuado através do software ADSA – P (Axisymetric Drop Shape Analysis
– Profile), desenvolvido por Neumann e seus colaboradores [73, 74]. O esquema experimental
encontra-se representado na figura 3. Utilizando uma microseringa, deposita-se uma gota do líquido
sobre o substrato colocado numa câmara fechada, com janelas de quartzo que permitem evitar a
distorção óptica. A medição das gotas foi efectuada à temperatura ambiente em atmosfera saturada
com o líquido utilizado, de forma a minimizar a evaporação das gotas. A câmara de ensaio é
iluminada por luz proveniente de uma fonte, atravessando a luz à saída da mesma, um filtro difusor. A
utilização do filtro garante uma uniformização de luminosidade e em simultâneo evita o aquecimento
da gota. As imagens são adquiridas através de uma câmara de vídeo (JAI CV – A50) com sistema
óptico (microscópio Wild M3Z) incorporado, que regista imagens em função do tempo pretendido.
Figura 16. Esquema experimental de medição ângulos de contacto, adaptado de [68]

24
2.3.3.4 Procedimento de Limpeza
Previamente à medição dos ângulos de contacto, todas as amostras, excepto quando
mencionado, foram sujeitas a uma etapa de limpeza, que é descrita na seguinte sequência [75]:
1) Imersão da amostra numa solução de H2O2(1):H2SO4(1) durante 10 minutos.
2) Imersão numa solução de HF(1):H2O2(9) durante 30 segundos.
3) Imersão numa solução de H2SO4 durante 10 minutos.
4) Imersão na solução de HF acima mencionada durante 30 segundos.
Entre todas as etapas, as amostras foram lavadas com água destilada e desionizada. Depois da
última lavagem as amostras foram secas com azoto gasoso, e colocadas posteriormente num forno
vácuo durante um período mínimo de 2 horas, de forma a remover a humidade.

25
2.3.4 Espectroscopia de Fotoelectrões
A espectroscopia de fotelectrões ou XPS (X – Ray Photoelectron Spectroscopy) consiste
numa técnica de análise de electrões emitidos de um dado material como resultado da sua interacção
com radiação X. A técnica de espectroscopia fotoelectrões é uma das técnicas mais utilizadas para a
análise de superfícies, permitindo examinar a composição elementar de uma superfície sólida e obter
informação relativa ao estado químico dos elementos [76].
A incidência de raios - X sobre uma amostra promove a libertação de electrões das suas
camadas mais internas. Os electrões emitidos são designados de fotoelectrões e apresentam uma
energia que é característica do nível energético de origem. A análise espectral destes electrões
possibilita a identificação do átomo donde provém o electrão, bem como a caracterização do seu
estado energético [36].
Figura 17. Diagrama esquemático do processo de XPS, fotoionização de um átomo por remoção de um electrão 1s, [77]
O processo de fotoemissão encontra-se representado na Figura 17, em que um electrão do
nível K é removido do átomo. A energia do fotão incidente é υh , e a energia cinética do fotoelectrão
ejectado será dada por EC = hυ – EL – Φ, sendo EL a energia de ligação do fotoelectrão e Φ a função
de trabalho do material. Apenas os fotoelectrões cuja energia seja superior à função de trabalho do
material,Φ, é que conseguem escapar da superfície do material. Assim que o electrão é emitido se
forma uma lacuna num dado nível energético, podem ocorrer dois fenómenos de relaxação para o
átomo voltar ao seu estado de menor energia. Um electrão de uma camada superior preenche a
lacuna com a respectiva emissão de um fotão de raio – X correspondente à transição electrónica, ou
depois de preenchida a lacuna há emissão de um electrão de uma camada superior, designado de
electrão Auger [78]. Um equipamento de espectroscopia de fotelectrões é constituído por uma
câmara de ultra alto vácuo, onde são colocadas as amostras, uma fonte de raio – X, um analisador
electrostático e por fim um detector – Figura 18. Os picos de XPS são identificados utilizando a
notação química que descreve o nível de energia do electrão detectado.
Na presente tese as análises de XPS foram realizadas com o recurso do sistema MICROLAB
310 F (Vg Scientific). Os espectros de XPS foram obtidos para uma pressão de 5x10-9 mbar, com a
utilização de uma fonte de raios-X de magnésio (não monocromática), em modo constante de análise
de energia (CAE = 30 eV). Todos os picos obtidos foram corrigidos relativamente ao carbono C1s,
285 eV.

26
( )2
21
12
122
12
2 cossin⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
++−
=MM
MMMK θθ
01 KEE =
Figura 18. Esquema representativo de um espectrómetro de fotoelectrões, [79]
2.3.5 Espectrometria de retrodispersão de Rutherford
A espectrometria de retrodispersão de Rutherford (RBS – Rutherford backscatterd
spectroscopy) baseia-se na medição de energia de partículas retrodispersas de um dado feixe
incidente, que sofrem colisões elásticas com um determinado alvo. Com base nesta informação é
possível determinar a massa atómica e concentração dos elementos da amostra bem como perfis de
concentração elementares.
A técnica de retrodispersão de Rutherford assenta em quatro conceitos [80], que são os
seguintes:
1 - A transferência parcial de energia de uma partícula incidente para uma partícula do alvo.
Esta quantidade de energia transferida é dada pelo factor de cinemática, K, que relaciona a energia
da partícula incidente E0, com a energia E1 após colisão. O factor de cinemática pode ser obtido com
base em no principio de conservação de momento e de energia cinética, sendo dado por [80]:
Equação 13
Em que M1 e M2 são as massas da partícula incidente e do alvo, e θ o ângulo de retrodispersão da
partícula. A energia da partícula retrodispersa após s sua colisão será dada por [80]:
Equação 14
A identificação do elemento retrodisperso é realizada com base nas equações anteriores. A energia
da partícula após retrodispersão bem como o seu ângulo, são dados obtidos experimentalmente.
Conhecendo o valor da energia da partícula incidente E0 e com base na Equação 14, obtêm-se o

27
σΩ= NQtA
ΩΩΩ
= ∫Ωd
ddσσ 1
EN dxdE
dxdE
dxdE
+=
( )( )( )( )[ ] 2/12
22
12
4
2221
sin211
cossin211
sin4
4 θ
θθ
θσ
MM
MM
EeZZ
dd
−
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
+⎥⎦⎤
⎢⎣⎡ −
⎟⎟⎠
⎞⎜⎜⎝
⎛=
Ω
valor do factor de cinemática, que é substituído posteriormente na Equação 13 onde se determina o
valor de M2, único parâmetro desconhecido.
2 - A probabilidade de uma colisão entre as partículas do feixe e o alvo gerarem um evento
dispersivo para um dado ângulo θ específico, é dado pelo conceito de secção eficaz diferencial dσ/dΩ
[80]
Equação 15
Onde Z1 e Z2 são os números atómicos da partícula incidente e da amostra. A Equação 15 mostra
que a secção eficaz diferencial é directamente proporcional a Z2, o que revela a maior sensibilidade
desta técnica para elementos mais pesados. Pela mesma equação também se verifica que a secção
eficaz diferenciável é inversamente proporcional a E2.
O número total de partículas detectadas pelo detector A, é dado pela Equação 16, em que N
é a densidade atómica da amostra, t a espessura da mesma, Q o número total de partículas e Ω o
ângulo sólido [81]
Equação 16
Sendo σ a secção eficaz dada por [80]:
Equação 17
3 - A perda de energia de uma partícula do feixe incidente durante o seu percurso na
amostra.
A perda de energia por unidade de comprimento é designada de poder de paragem do alvo. A
medição e estudo da energia perdida em função da distância percorrida, permite a determinação da
concentração em função da profundidade.
A perda de energia de uma partícula no seio do material pode ocorrer através de interacções
electrónicas ou nucleares com os elementos presentes do alvo. O poder de paragem total resulta da
soma destas duas contribuições
Equação 18

28
inX EEE Δ−= 0
outxout EKEE Δ−=
outin EKEE Δ+=Δ
10 EKEE −=Δ
Contudo a contribuição do poder de paragem nuclear é apenas significativo para valores de baixas
energias de partículas incidentes, como foi visto anteriormente. Assim na espectroscopia de
retrodispersão de Rutherford, podemos só considerar o poder de paragem electrónico.
Figura 19. Representação esquemática da trajectória de uma partícula no seio de um dado alvo.
Através de considerações energéticas é possível estabelecer uma relação entre a
profundidade à qual uma partícula é retrodispersa e a sua energia com esta é detectada - Figura 19.
A energia de uma partícula incidente à profundidade x de um dado material é definida através da
seguinte expressão:
Equação 19
Em que Ex é a energia à profundidade x, E0 a energia do feixe e ΔEin a energia perdida pelo feixe ao
percorrer ao percorrer a distância x – Figura 19. De forma análoga é possível determinar a energia
com que as partículas abandonam o material, com base na seguinte equação:
Equação 20
Em que ΔEout KEx é a energia imediatamente a seguir à colisão e ΔEout a energia da perdida pela
partícula até à sua saída do meio.
A diferença de energia, ΔE, entre uma partícula retrodispersa à superfície e a retrodispersa à
uma dada profundidade x é dada por:
Equação 21
Com base nas equações anteriores, Equação 19 e Equação 20 pode-se exprimir a mesma variação
de energia através de
Equação 22

29
( )
∫−=1cos(
00
θx
x dxdxdEEE
( )1cos0
0 θx
dxdEEE
Ex −=
( )1cos0
θx
dxdEE
Ein =Δ
( )2cos0
θx
dxdEE
KEOut =Δ
xdxdE
dxdEKE
KEE
.)2cos(
1)1cos(
00 ⎥⎥⎦
⎤
⎢⎢⎣
⎡+=Δ
θθ
[ ]xSE =Δ
Segundo [80], a energia de uma dada partícula à profundidade x, cujo valor, segundo a Figura 19
será x/cos(θ1), é:
Equação 23
Considerando o valor de dxdE constante, aproximação válida para a análise em RBS uma vez que
se trata de uma técnica de superfície, obtém-se o valor de energia dado por
Equação 24
Através de um raciocínio semelhante pode-se efectuar o cálculo para a energia de saída. Das
equações resultantes vamos obter ΔEin e ΔEOut dados por:
Equação 25
Equação 26
Conhecidos estes valores, substituímos na Equação 22, da qual retiramos
Equação 27
Equação 28
Onde [S] é o poder de paragem do alvo ou factor S, e x a profundidade à qual ocorre retrodispersão.
Com base na Equação 28, é possível determinar experimentalmente a profundidade à qual ocorre
retrodispersão.
4 - O último conceito no qual assenta esta técnica experimental está associado à dispersão
da energia das partículas do feixe.
A enorme aleatoriedade das colisões, isto é, do seu número, e pelo facto das perdas de
energia não se manterem constantes para cada colisão, origina um aumento da dispersão da energia
do feixe. Um feixe de partículas monoenergético transforma-se numa distribuição de energias após

30
[ ]21
221
44))2ln(8(( NxZZeE Zes πδ =
221min 18,18 −+= ζχ Ndu
atravessar um material homogéneo. Este fenómeno é função do número atómico da amostra, bem
como da sua espessura. Uma vez que a identificação de elementos e determinação de perfis de
concentração dependem da determinação de energia, a dispersão vai afectar a resolução em termos
de massa e profundidade. A contribuição da dispersão pode ser contabilizada através da
aproximação de Bagg, dada por [80]:
Equação 29
Com se verifica nesta aproximação a dispersão em energia do feixe é independente da energia das
partículas.
2.3.5.1 Canalização Iónica
A canalização consiste na condução de feixe de iões energéticos através dos espaços livres de
filas ou planos atómicos (canais) num cristal. As partículas sentem o potencial criado pela rede
cristalina sendo a sua condução resultado de uma série de interacções de baixo ângulo com o
potencial criado nos átomos, iões que formam o canal. Uma vez que as partículas carregadas são
sensíveis à estrutura cristalina, é possível inferir acerca da qualidade cristalina do meio, tendo em
conta que o rendimento de retrodispersão segundo uma direcção de canalização é resultado da
colisão com átomos fora das suas posições de equilíbrio [81].
Figura 20. Representação esquemática do efeito de canalização de uma partícula α,
Com base no efeito de canalização iónica é possível obter informação acerca da qualidade a
partir do rendimento mínimo (χmin), definido como sendo a razão entre a taxa de contagens de
retrodispersão ao longo da direcção de canalização e a taxa de contagens ao longo de uma direcção
aleatória [81]
Equação 30
Em que N é a densidade atómica do meio, e ζ = (126u1/Ψ1/2) com u1 definido como a amplitude de
vibração dos átomos da rede cristalina e Ψ1/2 a largura a meia altura das curvas de descanalização
obtidas a partir de [81]

31
dEeZZ
00
221
21 4
2πε
=Ψ
Equação 31
Quanto maior for o valor de (χmin) maior será a taxa de “descanalização”, pelo que será indicativo da
presença de um maior número de átomos fora das suas posições de equilíbrio, ou seja um cristal com
maior número de defeitos.

32
Capítulo III - Resultados e Discussão
3.1 Processamento de amostras de silício por LASER
3.1.1 Optimização de Parâmetros de Processamento por LASER.
A parte experimental da presente tese inicia-se com a optimização dos parâmetros de
tratamento do silício com LASER de femtosegundo. Pretendia-se obter estruturas regulares que
apresentassem potencialmente capacidade para tornar o silício hidrofóbico, começou-se por fazer a
análise da distância focal, seguindo-se a velocidade de varrimento do LASER, a potência e a
sobreposição de pistas ou varrimentos.
3.1.1.1 Efeito da Distância ao Foco
A fase de optimização iniciou-se com variação da distância da amostra ao LASER [56.500 –
47.00] µm, com energia constante de 700 µJ e com dois valores de frequência 1 e 100 kHz. Para
cada distância foram utilizados aproximadamente 100 impulsos. Os resultados obtidos encontram-se
resumidos na Figura 21. É possível observar que os parâmetros escolhidos para o primeiro conjunto
de experiências conseguem efectivamente induzir uma certa textura no silício. A Figura 21a) revela
um conjunto de estruturas já bem desenvolvidas semelhante a pilares ou colunas rodeadas de micro
buracos. À medida que a distância ao foco diminui, mais concretamente no intervalo [55.500-54.500]
µm é possível observar que em vez de estruturas obtemos crateras, devido ao aumento da densidade
de energia. Neste intervalo a energia em cada ponto é superior aos pontos anteriores. A partir dos
54.500 µm deixa-se de se obter crateras e passamos novamente a obter estruturas rodeadas de
pequenos buracos. As estruturas reaparecem devido ao afastamento da amostra relativamente à
posição do foco do LASER, o que corresponde a uma diminuição da densidade de energia em cada
ponto, visível a partir da Figura 21g) e figuras posteriores. A Figura 21l), obtida com menor densidade
de energia, visto ser a que se encontra mais afastada do foco, apresenta na sua superfície a
presença de uma estrutura regular periódica semelhante a ondas, que se assemelha a instabilidades
hidrodinâmicas.
Para uma frequência de 100 kHz os resultados obtidos foram essencialmente crateras, não
se tendo observado nada de interessante com o aumento da frequência.

33
Figura 21. Variação da distância da amostra ao LASER com energia 700 µJ, 100 impulsos e frequência de 1 kHz. a)56.500
µm, b)56.000 µm, c)55.500 µm, d)55.000 µm, e)54.500 µm, f)51.000 µm, g)50.500 µm, h)50.000 µm, i)49.500 µm j)49.000 µm
k)48.500 µm l)47.500 µm.

34
3.1.1.2 Efeito da Velocidade
Após obtidos os pontos representados na Figura 21 iniciou-se o estudo dos parâmetros mais
adequados para a obtenção de áreas com dimensões superiores. Recorrendo ao movimento da mesa
XYZ, efectuaram-se varrimentos com diferentes velocidades. A primeira fase do estudo foi a variação
da velocidade entre 2000 - 500 µm/s e entre 500 - 50 µm/s com uma distância fixa de 55.500 µm e
uma potência de 500 mW.
O primeiro conjunto de velocidades estudado (2000, 1000, 750, 500 µm/s) apresentou
resultados pouco positivos. As velocidades eram excessivas, pelo que apenas havia formação das
estruturas mesmo no centro do varrimento efectuado. O segundo de conjunto de velocidades testado
(500, 250, 100, 50 µm/s) encontra-se representado na Figura 22. As velocidades testadas para
valores inferiores a 500 µm/s revelam-se más opções. Na Figura 22c) é possível ver que o feixe é
demasiado lento, e que deste modo as estruturas recebem demasiados impulsos, o que se observa
não ser particularmente benéfico para o desenvolvimento das mesmas. Para 100 e 50 µm/s
basicamente observa-se crateras. As estruturas obtidas com velocidade de 500 µm/s apresentam
uma morfologia idêntica à Figura 21h). A Figura 22b) inclinada 45º permite obter uma melhor
percepção da mesma. Deste modo decidiu-se continuar a optimização dos restantes parâmetros
utilizando uma velocidade constante de 500 µm/s.
Figura 22. Micrografias de SEM dos varrimentos efectuados com diferentes velocidades a)500 µm/s, b)500 µm/s inclinada 45º,
c)250 µm/s, d)100 µm/s
a) b)
c) d)

35
3.1.1.3 Efeito da Potência
Com uma velocidade fixa de 500 µm/s e uma distância do LASER à amostra constante de
55.500 µm, efectuaram-se varrimentos com diferentes potências, entre os 490 e 770 mW. Os
resultados encontram-se resumidos na Figura 23. Verifica-se que com o aumento de potência
encontram-se mais estruturas. Para a Figura 23a) com varrimento efectuado com maior potência, já
não é possível observar estruturas do tipo ondas, pois as estruturas encontram-se individualizadas. O
mesmo não se verifica para os restantes varrimentos com menores potência. Para além da variação
da potência também se efectuou uma sucessão de três varrimentos na mesma direcção. O resultado
obtido encontra-se na Figura 23d). As estruturas pretendidas encontram-se presentes, no entanto, a
excessiva quantidade de material depositado nas margens do varrimento efectuado tornam esta
abordagem pouco eficaz para a reprodução de áreas de maior dimensão.
Este conjunto de experiências permitiu concluir que, com potências iguais ou superiores a
500 mW e com velocidade de varrimento constante de 500 µm/s é possível obter as estruturas
homogéneas com elevado potencial para reduzir a molhabilidade do silício.
Figura 23. Varrimentos com diferentes potências a)770 mW, b)580 mW, c)490 mW, d)Três varrimentos sucessivos com 490
mW.
a) b)
c) d)

36
3.1.1.4 Efeito da Sobreposição Entre Varrimentos
De forma a obter superfícies tratadas efectuaram-se varrimentos com diferentes taxas de
sobreposição entre pistas. Os resultados obtidos com uma potência de 520 mW, distância 55.500 µm
e velocidade de 500 µm/s, encontram-se resumidos na Figura 24.
Figura 24. Variação da distância entre varrimentos a)50 µm, b) 100 µm, c)150 µm, d)200 µm
É possível observar que, se o desvio entre pistas for inferior a 100 µm estas encontram-se
demasiado sobrepostas Figura 24 a)b). Para distâncias entre varrimentos superiores a 150 µm,
observa-se a presença de varrimentos completamente diferenciados Figura 24 c)d). Contudo as
zonas referentes às margens apresentam-se bastante defeituosas.
A partir deste ponto decidiu-se efectuar os varrimentos com um diafragma ou limitador de
feixe. A justificação para tal, prende-se pelo facto de o LASER apresentar uma distribuição de energia
Gaussiana. Com a utilização de um limitador de feixe obter-se-á uma distribuição de energia mais
uniforme, o que poderá solucionar o problema fronteiras demasiado irregulares.
a) b)
c) d)

37
3.1.1.5 Efeito da Utilização do Diafragma
As experiências foram efectuadas nas mesmas condições de potência, distância e velocidade
varrimentos com diferentes espaçamentos mas com o auxílio de um diafragma.
Figura 25. Varrimentos com diferentes distâncias entre os mesmos a)45µm, b)ampliação da figura a) inclinada 45º, c)75 µm,
d)ampliação da figura c), e)100 µm, f)125 µm
A utilização do diafragma introduz alterações profundas na topografia das áreas varridas cujo
efeito pode ser observado na Figura 25. As estruturas obtidas não são tão desenvolvidas como nos
a) b)
c)
e) f)
d)

38
casos anteriores, dando a entender que se encontram num estado muito primário de
desenvolvimento, consequência da limitação do feixe que induziu uma súbita redução da densidade
de energia. No entanto, verifica-se que a utilização do diafragma com os parâmetros utilizados
permite a obtenção de superfícies tratadas mais homogéneas, para distâncias entre varrimentos
inferiores as 100 µm, Figura 25b)d). Para distâncias superiores a 100 µm, Figura 25 e)f), o mesmo já
não se verifica. Nas Figura 25b)d), de maior ampliação é possível observar a presença de uma
segunda rugosidade, com menor comprimento de onda e perpendicular às ondas. Face ao estado
incipiente de desenvolvimento das estruturas, decidiu-se continuar o reajuste dos parâmetros com
diafragma.
3.1.1.6 Efeito da Variação da Potência com Diafragma
Face aos resultados obtidos anteriormente, optou-se por realizar varrimentos com distância
constante de 55.500 µm e uma velocidade de 500 µm/s com variação da potência. O objectivo deste
conjunto de experiências consiste em tentar obter estruturas mais desenvolvidas que as anteriores.
Os varrimentos foram efectuados com um espaçamento de 75 µm. Os resultados encontram
presentes na Figura 26.
Com o aumento da potência observa-se um claro desenvolvimento das estruturas, no
entanto, esse mesmo aumento de potência introduz um maior afastamento entre os varrimentos, o
que não se pretende.
Figura 26. Varrimentos efectuados com diferentes potências e distância constante de 75 µm a) 590 mW b) 688 mW c)790 mW
d)2.505 W com frequência de 10 kHz
a) b)
c) d)

39
3.1.1.7 Efeito da Variação da Distância ao Foco Diafragma
Mantendo uma potência e uma velocidade constante de 500 mW e 500 µm/s
respectivamente, efectuaram-se varrimentos com variação da distância da amostra ao LASER. A
distância inicial de 55.500 µm foi-se reduzindo a de 1000 µm até aos 50.500 µm. Os resultados
obtidos mostram que com a aproximação ao foco, não ocorreram praticamente alterações em relação
às estruturas iniciais.
3.1.1.8 Efeito da Velocidade com Diafragma
Com os mesmos valores de potência 520 mW, e distância em relação ao LASER de 55.500
µm, efectuaram-se varrimentos com distância fixa de 75 µm mas com variação da velocidade de 450
a 200 µm/s. Os resultados obtidos encontram-se presentes na Figura 27 e como se verifica apenas
são visíveis os varrimentos obtidos com velocidades de 450 e 200 µm/s, não sendo as diferenças não
são muito significativas. O varrimento obtido com menor velocidade apresenta estruturas mais
desenvolvidas do tipo onda, devido ao maior número de impulsos em cada instante. Nos restantes
varrimentos efectuados, as estruturas mantêm-se idênticas à da Figura 27a).
Figura 27. Varrimentos efectuados com variação da velocidade a)450µm/s. b)200µm/s.
Com base nos resultados obtidos decidiu-se continuar a estudar o efeito da velocidade com
diafragma, tendo sido realizados estudos com velocidades inferiores a 200 µm/s. Numa primeira fase
os varrimentos foram efectuados com 150;100; 50 µm/s. Os resultados encontram-se resumidos na
Figura 28a)b). Verifica-se que as velocidades escolhidas eram excessivamente baixas, pelo que, os
varrimentos efectuados apresentam zonas irregulares, derivadas talvez, de fusão e resolidificação.
Quanto menor a velocidade, maior a notoriedade dessas mesmas zonas. Para uma velocidade de 50
µm/s os varrimentos encontravam-se completamente obstruídos por material ablado e redepositado e
por zonas de fusão e resolidificação. Na segunda fase efectuou-se a variação da velocidade de
velocidade no intervalo 160 – 190 µm/s com incrementos de 10 µm/s. Os resultados encontram-se
resumidos na Figura 28c)d). Durante esta variação foi possível observar em todos os varrimentos
b)a) b)

40
zonas irregulares tal como as anteriormente mencionadas. Com o aumento da velocidade estas
tendem a tornar-se menos expressivas.
Figura 28. Efeito da velocidade com diafragma, para valores inferiores a 200 µm/s, (a) 150 µm/s, (b)100 µm/s, (c)160 µm/s,
(d)190 µm/s
A partir deste ponto foram efectuados mais dois conjuntos de experiências, ainda dentro da
optimização do parâmetro velocidade. Com uma potência de 620 mW, e uma distância entre
varrimentos de 85 µm, variou-se a velocidade a velocidade de 200 a 350 µm/s. Os resultados desta
vez não permitiram retirar informação relevante. A potência utilizada foi de tal forma excessiva que
para velocidades baixas encontravam-se presentes as zonas irregulares mencionadas anteriormente,
e para velocidades mais altas, os varrimentos encontravam-se demasiado espaçados.
3.1.1.9 Conclusão
De uma forma geral verifica-se uma grande dificuldade na obtenção de estruturas
desenvolvidas e reprodução das mesmas de forma uniforme ao longo dos varrimentos. Todavia
decidiu-se efectuar a produção de áreas com dimensões de 1.5x1 cm2 com os parâmetros que
indiciaram melhores resultados, nomeadamente potências próximas dos 500 mW, distância entre
varrimentos de 75 µm, distância do LASER em relação à amostra de 55.500 µm e uma velocidade de
b)
c) d)
a)

41
200 µm/s. Condições semelhantes à utilizada na produção das estruturas representadas na Figura
27b).
3.1.2 Texturização de Superfícies de Silício por laser com Parâmetros Optimizados.
3.1.2.1 Condições Experimentais
As condições experimentais optimizadas com as quais se realizaram as amostras submetidas
a caracterização topográfica, química, estrutural e de comportamento a molhabilidade, encontram-se
na Tabela 2.
Tabela 2. Condições experimentais utilizadas para a realização das amostras em área
Amostra Potência (*) Inicial (mW)
Potência (*) Final (mW)
Velocidade (µm/s)
Distância entre Varrimentos (µm)
Distância em relação à amostra
(µm) A 1 520 - 500 75 55.500 A 2 523 610 200 75 55.500 A 3 610 625 200 75 55.500 A 4 580 600 200 75 55.500 A 5 510 610 200 75 55.500 A 6 595 600 200 75 55.500 A 7 592 608 200 75 55.500
*Com base nos valores da Tabela 2 verifica-se que nas condições utilizadas para a produção de amostras existem alguns
desvios dos valores de potência, relativamente aos valores optimizados. A razão de ser desta situação prende-se com o facto
de haver flutuações de potência no equipamento utilizado impossíveis de controlar.
3.1.2.2 Caracterização Topográfica de Áreas Tratadas por Microscopia de Electrónica de Varrimento
A observação das amostras tratadas em área possibilitou detectar de dois tipos de topografia
distintos:
a) Ondulação definida perpendicularmente à direcção do varrimento do feixe, com comprimento
de aproximadamente 500 nm.
b) Ondulação irregular de maior amplitude e comprimento de onda do que o anterior, com
aproximadamente 3 µm, alinhado paralelamente à direcção de varrimento do feixe.
Estes tipos de rugosidade, a partir de agora denominados do tipo A e B, estão presentes para
todas as amostras processadas em área. A Figura 29a) e Figura 29b) são referentes à amostra A1,
enquanto a Figura 29c) e Figura 29d) são referentes à amostra A3, representativa das restantes
amostras processadas em área. Com base nos valores da Tabela 2, verifica-se que os parâmetros
são ligeiramente diferentes, mais concretamente a velocidade de varrimento. Na Figura 29a) é
possível observar a rugosidade do tipo A, de forma nítida, e também a rugosidade do tipo B,
perpendicular à anterior. Na Figura 29b), de menor ampliação a rugosidade do tipo A, é ainda visível

42
mas um pouco menos perceptível, esta figura permite ter uma melhor observação da rugosidade do
tipo B. Em relação à Figura 29c), observa-se uma grande diferença comparativamente à Figura 29a).
Na Figura 29c) observa-se novamente os dois tipos de rugosidade, sendo notório o desenvolvimento
da rugosidade do tipo B. A rugosidade do tipo A apresenta-se menos visível. Na Figura 29d) é
observa-se que nas zonas entre varrimentos, correspondentes a zonas de sobreposição de feixe,
observa-se uma estrutura idêntica à da Figura 29a)b), isto é, rugosidade do tipo B pouco
desenvolvida cruzada com rugosidade do tipo A. Quando nos direccionamos para a periferia do
varrimento, observa-se uma rugosidade do tipo B mais desenvolvida. Esta observação juntamente
com facto de que uma redução de velocidade de varrimento originou uma transição de uma estrutura
igual à da Figura 29a) para uma estrutura idêntica à da Figura 29c), prova que as estruturas da Figura
29a) representam um estágio embrionário das estruturas presentes na Figura 29c). A diminuição da
velocidade garantiu um maior número de impulsos, o que possibilitou um maior desenvolvimento da
das estruturas, nomeadamente da rugosidade do tipo B.
Figura 29. Observação dos dois tipos de rugosidade, tipo A e B, para diferentes condições experimentais, (a) e (b) amostra A1
obtida com velocidade de 500 µm/s, e (c) e (d) amostra produzida com 200 µm/s.
d)
b)
c)
a)

43
Com base em observações de SEM, foi possível compreender o efeito da variação da potência
sobre a qualidade dos varrimentos. A Figura 30 mostra a microestrutura obtida da amostra A2. A
Figura 30a) é representativa da zona onde se iniciaram os varrimentos, zona de menor potência, a
estrutura apresentada é idêntica à pretendida, da Figura 27b). Contudo, durante a elaboração da
amostra ocorreu uma variação de potência de aproximadamente 90 mW. A Figura 30b) é
representativa dos varrimentos efectuados nas zonas finais correspondentes à zona de maior
potência. A variação de potência trouxe algumas variações face à morfologia inicial, as estruturas
tornaram-se mais desenvolvidas, contudo formaram-se zonas irregulares ao logo dos varrimentos. O
espaçamento entre varrimentos aumentou.
Figura 30. Variação da potência durante os varrimentos da amostra A2, (a) zona de menor potência, (b) zona de maior
potência.
3.1.2.3 Caracterização Topográfica de Áreas Tratadas por Microscopia de Força Atómica
Através da análise das amostras tratadas em área por microscopia de força atómica, foi
possível observar as estruturas de forma pormenorizada, e determinar a periodicidade das mesmas.
A Figura 31a) corresponde às estrutura da amostra A1, onde é possível observar os dois tipos de
rugosidade anteriormente mencionados, tipo A e B. A Figura 31b), obtida com maior ampliação
(imagem de 5x5µm2), mostra que a rugosidade do tipo A, também se encontra dividido por uma outra
rugosidade. Sobre Figura 31b) com base no programa de análise de imagem de AFM, Image
Analysis, foi possível determinar o comprimento de onda da rugosidade do tipo A, tendo-se obtido
valores compreendidos entre 720 e 820 nm, Figura 32a), e comprimento de onda rugosidade que
divide a rugosidade anteriormente mencionada, tendo-se obtido um valor próximo dos 330 nm Figura
32b). Em relação à rugosidade do tipo B, determinou-se que esta apresentava uma amplitude
compreendida entre 260 e 330 nm, e um comprimento de onda de compreendido entre 2 e 3 µm.
b)a)

44
Figura 31. Imagem de AFM da amostra A1 (a) imagem 3D, (b) Imagem de 5x5µm2 correspondente a uma ampliação da Figura
(a).
Figura 32. Perfis de altura da Figura 31(cima) Segundo a direcção da rugosidade do tipo A, (abaixo) Segundo uma direcção
perpendicular à rugosidade do tipo A.
Foram também obtidas imagens de AFM referentes às restantes amostras A2 - A7. A Figura
33a) é representativa das imagens obtidas. Nesta, é possível observar novamente a presença dos
dois tipos de rugosidade, encontrando-se mais desenvolvida a rugosidade do tipo B. Neste tipo de
amostras a rugosidade do tipo A apresenta uma amplitude variável compreendida entre os 80 e 200
nm e um comprimento de onda de aproximadamente 700 nm,
a) b)

45
Figura 34b). O comprimento de onda encontra-se dentro do mesmo intervalo do mencionado
acima. A rugosidade do tipo B apresenta uma amplitude que varia entre 700 nm e 1µm com
comprimento de onda de compreendido entre 3 e 4 µm,
Figura 34a).
Figura 33. (a) Imagem de AFM 3D da amostra A3 15x15 um2, representativa das restantes amostras, (b) imagem de AFM
10x10µm2 ampliada da Figura(a)
Figura 34. Perfis de altura da Figura 33(b) (a) segundo a direcção da rugosidade do tipo B, (b) segundo a direcção da
rugosidade do tipo A.
b)
a)
a) b)

46
Foi determinado com base nas imagens de AFM o parâmetro r, definido como sendo cociente
entre a área real e a área projectada, as amplitudes e comprimentos de onda típicos. Os resultados
encontram-se presentes na Tabela 3.
Tabela 3. Dados experimentais retirados da análise das amostras processadas em área por AFM
Amostra
r(5x5µm2)
r(15x15µm2)
c.d.o (nm) tipo A
Amplitude (nm) tipo A
c.d.o (µm) tipo B
Amplitude (nm) tipo B
A1 1,108 1,134 700 - 800 80 - 180 3 - 4 260- 350 A2 1,187 1,169 740 - 820 90 -150 3,25 – 3,73 780 – 1350 A3 1,259 1,281 720 - 840 120 - 220 3,2 – 3,85 820 - 940 A4 1,297 1,331 680 -780 130 - 240 3,4 – 4,2 740 - 980 A6 1,290 1,282 * * * * A7 1,199 1,343 740 - 850 80 - 280 3,1 – 4,2 690 - 940
Comparando os valores experimentais apresentados na Tabela 3, observa-se que as
amostras processadas em área são semelhantes entre si. A amostra A1 apresenta o menor valor de r
e de amplitude da rugosidade do tipo B, o que seria de esperar, uma vez que o seu processamento
foi realizado sob condições diferentes das restantes. No entanto os restantes parâmetros encontram-
se na mesma gama das outras amostras.
Estruturas idênticas às da Figura 29a) foram observadas em trabalhos experimentais anteriores
com processamento LASER de femtosegundo [82, 83]. As estruturas obtidas por estes autores, tal
qual as obtidas experimentalmente, apresentam os dois tipos de rugosidades previamente
mencionados. A rugosidade de menor comprimento de onda, tipo A, parece pertencer a um conjunto
de estruturas denominadas de LIPSS (Laser-induced periodical surface structure) estudadas há
algumas décadas, observadas em diversos materiais como semicondutores, dieléctricos e metais
[84]. A formação deste tipo de estruturas permanece ainda uma incógnita [84]. A teoria clássica [83,
84], a mais conhecida, atribui a formação deste tipo de estrutura a fenómenos de interferência entre
entra radiação incidente, e a radiação dispersada ou difractada da superfície, devido à presença de
defeitos ou à própria rugosidade superficial. Esta situação irá gerar uma distribuição de energia
heterogénea sobre a superfície que provocará as ondulações. Segundo esta teoria, para uma
incidência normal, a periodicidade das ondulações é próxima do comprimento de onda do LASER, e
perpendicular à polarização do LASER em metais e semicondutores. No entanto, verifica-se que esta
teoria não explica todos os resultados experimentais, nomeadamente para o processamento de
amostras com LASERs de femtosegundo [82, 83].
Em relação ao segundo tipo de rugosidade, tipo B, estas têm sido pouco estudadas e é difícil
encontrar bibliografia referente. A forma deste tipo de rugosidade parece idêntica às ondas
observadas por Dolgaev [85], no entanto este tipo de estrutura foi observada para processamento
com LASER de nanosegundo, não sendo possível comparar directamente as estruturas obtidas no
presente trabalho. Singh et al. [86], descrevem também estruturas semelhantes. No entanto, nos
poucos trabalhos encontrados, os mecanismos de formação destas estruturas ainda são muito mal
compreendidos.

47
3.1.3 Implantação Iónica
A implantação iónica foi realizada em dois conjuntos de amostras diferentes: amostras lisas
sem qualquer tipo prévio de tratamento e amostras processadas com LASER, mais concretamente
sobre a amostra A2 e A4.
As amostras implantadas foram posteriormente analisadas em microscopia electrónica de
varrimento e microscopia de força atómica. As imagens obtidas para as amostras 2 e 4 exibem
exactamente as mesmas estruturas antes e pós implantação e o mesmo se pode dizer em relação às
amostras lisas sem processamento LASER. Desse modo, podemos concluir que, as condições de
utilizadas no processamento por implantação iónica, não promovem alterações topográficas nas
superfícies.
Uma das amostras lisas implantada foi processada a LASER posteriormente. Os parâmetros
utilizados de velocidade, distância entre varrimentos, distância em relação ao LASER são os mesmos
que foram utilizados para o fabrico das amostras A2 - A7. Os varrimentos iniciaram-se com uma
potência de 436 mW e terminaram com 478 mW. A variação de potência não foi significativa, contudo
foi inferior ao pretendido, 500mW. A Figura 35a) e b) mostram as estruturas obtidas. São em tudo
idênticas às estruturas anteriormente descritas.
Figura 35. Micrografia de SEM da amostra processada por laser depois de implantada.

48
3.2 Medidas de Molhabilidade
3.2.1 Efeito do processamento por LASER e da implantação iónica
Para efeito de comparação de processos realizaram-se medidas de molhabilidade para todas
as áreas processadas a LASER e/ou implantadas. Os resultados apresentados na Figura 36 resultam
da média de 3 - 4 medidas do ângulo de contacto com água. Os ângulos de contacto foram medidos
ao fim de 30 segundos após a deposição da gota sobre as respectivas amostras. Antes da medição,
as amostram foram sujeitas à etapa de limpeza e secagem mencionada anteriormente, tendo as
medições sido efectuadas sempre num período inferior a 24h após a limpeza.
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
A.Im
p. +
L
A.2
Imp
A.4
Imp
A.Vi
r. Im
p
A7A6A5A4A3A2A1
A. V
irgem
Ângu
lo d
e C
onta
cto
(θ)
A. de Referência A. Texturadas a LASER A. Implantadas
Figura 36.Comparação de resultados de ensaios de molhabilidade entre o processo de texturização a LASER e implantação
iónica ao fim de 30 segundos.
Efectuando uma comparação entre os resultados obtidos nas amostras texturadas por
LASER e as amostras implantadas, com a amostra de referência, observa-se uma expressiva
diferença. Verifica-se que o processo de texturização por LASER resulta num aumento do ângulo de
contacto de 62º (amostra de referência) para valores entre 90º (amostras A1 e A5) e 120º (amostra
A6), isto é, o tratamento por LASER torna as amostras de silício hidrofóbicas. Por outro lado, as
amostras submetidas ao processamento por LASER apresentam valores de ângulo de contacto

49
sempre superiores aos das amostras implantadas. A Figura 37 permite observar directamente a
diferença nos ângulos de contacto entre os processos de texturização a LASER e implantação iónica,
comparando uma amostra de cada um destes com a amostra de referência.
Figura 37. Comparação da forma da gota obtida em diferentes amostras (a) amostra virgem (62º), (b) amostra A4 (120º), (c)
amostra A2 após implantação (75º).
Das amostras texturadas por LASER, a amostra A1 e A5 apresentam os piores resultados.
Sobre algumas das amostras texturadas a LASER foram também realizadas algumas medidas de
molhabilidade para tempos mais longos em certas amostras, nomeadamente 1800s, para observação
da variação do ângulo de contacto com o tempo. A Figura 38 representa alguns dos resultados
obtidos. Nesta figura é possível verificar que em algumas amostras (A3 e A4) não foram visíveis
praticamente alterações dos ângulos de contacto com o tempo. Contudo, observa-se para a amostra
A5 a situação inversa, em 1800s, verifica-se uma variação de aproximadamente 30º em relação ao
valor inicial. Esta variação estará associada eventualmente a contaminação superficial, ou à variação
de potência durante o seu processo, embora não se tenha verificado uma alteração significativa em
termos dos varrimentos.
0 200 400 600 800 1000 1200 1400 1600 1800 200060
70
80
90
100
110
120
130
Ângu
lo d
e co
ntac
to(θ
)
tempo(s)
Amostra A3 Amostra A5 Amostra A4
Figura 38. Variação do ângulo de contacto com tempo para a amostra A3, A4 e A5.
a) c) b)

50
Em relação aos resultados nas amostras implantadas, verifica-se que o processo de
implantação permite obter ângulos de contacto superiores aos da amostra de referência
(aproximadamente 10º), excepto no caso da amostra A4. Esta diferença não é tão acentuada como a
que foi obtida nas superfícies tratadas por LASER. Nas amostras texturadas por LASER e sujeitas a
implantação, observa-se um acentuado decréscimo no seu valor de ângulo de contacto quando
comparado com a amostra simplesmente texturada. Ou seja, o processo de implantação parece
anular ou diminuir o efeito de texturização. No caso da amostra A2, verifica-se uma redução do
ângulo de contacto de 110º para aproximadamente 77º, após implantação. É possível observar o
mesmo comportamento para a amostra A4, em que se observa uma redução do ângulo de contacto
de 118º para 60º após implantação.
Por fim, uma das amostras lisas implantadas foi posteriormente processada a LASER.
Embora exibisse o mesmo tipo de estrutura que as restantes amostras texturadas a LASER, o seu
valor de ângulo de contacto, 77º, representa o valor mais baixo diante das amostras texturadas, valor
aproximadamente 20º inferior em relação aos piores resultados das amostras texturadas a LASER,
A1 e A5.
Todos estes factos dão a entender que o processo de implantação induz alterações das
propriedades de superfície que aumentam até acerto ponto o ângulo de contacto comparativamente à
amostra de referência virgem, mas que de alguma forma anulam o efeito de texturização.
Com base na Figura 36 verifica-se o processo de texturização a LASER, apresenta em
algumas amostras (A5, A6 e A3) uma elevada dispersão em termos de barra de erro, enquanto no
processo de implantação esses valores tendem a permanecer um pouco mais constantes. Esta
situação pode derivar de vários factores, nomeadamente, reduzido número de ensaios, contaminação
da superfície e erro do operador na deposição de gotas sobre as amostras.
Não foi possível comparar os ângulos de molhabilidade medidos com valores da literatura de
forma directa, na medida que não se encontrou medidas de molhabilidade sobre estruturas
semelhantes às obtidas. No entanto, encontram-se na literatura estudos de molhabilidade realizados
sobre superfícies texturadas com LASER de femtosegundo [16, 70, 87]. Para todas as referências as
amostram foram processadas em atmosfera controlada, apresentando estruturas do tipo cones na
superfície. Em [16] foram obtidos ângulos contacto da ordem dos 130º, superiores à maioria das
amostras obtidas experimentalmente. No entanto a amostra A6 chega a atingir este valor numa das
suas medições. A diferença entre os ângulos estará associada eventualmente à diferença de
estruturas. Em relação a [70, 87], os ângulos obtidos nestes trabalhos foram sempre inferiores: estes
autores mediram ângulos de 150º sobre as superfícies de silício texturadas a LASER. No entanto,
não é possível comparar os ângulos, uma vez que sobre as superfícies texturadas foram depositados
compostos orgânicos, que baixam o valor da energia de superfície, e como tal vão influenciar as
medições dos ângulos de contacto.
Em relação ao modelo que melhor descreve o comportamento da molhabilidade das amostras
processadas, é possível, de certa forma, pôr de parte o modelo de Wenzel puro, pois, tal como foi
visto na secção 2.3.3.2, para este modelo, caso o ângulo de contacto da superfície lisa (amostra de
referência) fosse inferior a 90º (cerca de 60º no presente caso), o aumento da rugosidade não se iria

51
traduzir num aumento do ângulo, mas sim numa redução, situação contrária à observada
experimentalmente. Assim é plausível assumir que o modelo de Cassie-Baxter possa descrever o
comportamento da molhabilidade das amostras processadas. Medidas de histerese ou ângulos de
deslizamento, não realizadas na presente tese, poderiam contribuir para a confirmação desta
hipótese [70, 87].
Em relação às amostras implantadas, também não se encontrou dados bibliográficos relativos
a estudos de implantação de silício sobre silício. Contudo, é possível encontrar alguns estudos de
molhabilidade sobre superfícies de silício implantada com alguns iões, nomeadamente, azoto (N) e
carbono (C) utilizando o processo de implantação iónica por imersão em plasma. Em relação ao
carbono [88], verifica-se que a sua implantação diminui a molhabilidade em relação a uma amostra de
referência com 52º, possibilitando ângulos de 72º, ângulos próximos aos obtidos experimentalmente.
Em relação ao efeito do azoto em termos de implantação, verifica-se que este pode aumentar ou
diminuir a molhabilidade das amostras, Ueda [88] verificou um aumento do ângulo de contacto de
aproximadamente 50º (amostra de referência) para 85º, enquanto outros autores [89] observaram que
a implantação deste mesmo ião com diferentes condições experimentais produzia superfícies de
silício hidrofílicas com ângulos de 30, 40, 50 e 60º. Os ângulos experimentais obtidos referentes as
amostras implantadas, foram sempre superiores a 60º (excepto na amostra A4 implantada) e
inferiores a 85º.
3.2.2 Efeito do Envelhecimento
De modo a analisar a reprodutibilidade e estabilidade dos ângulos de molhabilidade medidos
imediatamente após o processamento e limpeza das amostras, tornaram a ser efectuadas medidas
sobre as amostras A3, A6 e A7 cerca de um mês depois. É importante mencionar que antes das
novas medições de ângulos de molhabilidade, as amostras não foram sujeitas à etapa de limpeza
com ácidos mencionada anteriormente, mas foram limpas de forma cuidadosa com água destilada e
desionizada. Os resultados presentes na Figura 39 mostram uma evidente diferença entre os
resultados iniciais e os resultados posteriores. Todas as amostras ensaiadas passam de um estado
hidrofóbico (ângulo de contacto θ>90º) para um estado hidrófilo (ângulo de contacto θ<90º). A redução
dos ângulos de contacto após um mês anda na ordem dos 30 - 40% aproximadamente. Outro
aspecto interessante que é possível observar na Figura 39, consiste na redução do valor das barras
de erro entre os ensaios iniciais e os realizados posteriormente.

52
0
20
40
60
80
100
120
140 Ângulos Iniciais Ângulos Passado um Mês
A7A6 A3 A7 A6
Âng
ulo
de C
onta
cto(
θ)
A3
Figura 39. Efeito do tempo sobre as medidas de molhabilidade.
Esta situação de redução tanto do ângulo de contacto como da dispersão associada aos
resultados, sugerem que de alguma forma a superfície sofreu algum tipo alteração. A situação mais
esperada será um crescimento progressivo por parte da camada de óxido a partir do momento em
que se executa a etapa de limpeza com ácidos. A utilização de ácido fluorídrico parece remover a
camada superficial de óxido, deste modo, assim que o processo de limpeza termina, inicia-se
novamente o seu crescimento a partir do contacto da superfície com oxigénio, vapor de água e água
de lavagem [90]. Para avaliar a hipótese da influência da camada de óxido sobre as medidas de
molhabilidade, seleccionou-se a amostra A6 e mais duas amostras lisas. Umas das amostras lisas
juntamente com a amostra A6 foram submetidas novamente à etapa de limpeza com ácido, enquanto
a outra amostra lisa foi sujeita a uma etapa de limpeza com água destilada e desionizada e
detergente apropriado. Os resultados encontram-se presentes na figura seguinte

53
0
20
40
60
80
100
120
140
Amostra 6limpa novamente com ácidos
Amostra 61 mês depois
Amostra 6inicialmente
A. Lisasem ácidos
A. Lisacom ácidos
Âng
ulo
de C
onta
cto(
θ)
Amostras Lisas Amostra 6
Figura 40. Comparação de ângulos de contacto da amostra 6 e amostra lisa obtidas com diferentes tratamentos
Observando a Figura 40, é possível constatar que o valor de ângulo de contacto para a
amostra limpa com ácidos é superior ao da amostra lisa que não sofreu tratamento com ácidos. Os
resultados relativos à amostra A6 revelam que há efectivamente um acréscimo do valor do ângulo de
contacto após um novo tratamento de limpeza com ácidos. O ângulo de contacto subiu de 80º para
110º, tornado esta amostra novamente hidrofóbica.
Estes resultados mostram dois aspectos muito importantes. O primeiro, a influência da
limpeza com ácido fluorídrico sobre a molhabilidade das amostras. O segundo aspecto diz respeito ao
facto de, um novo tratamento com ácidos reverter a amostra envelhecida ao seu estado inicial,
eliminado em parte o efeito do envelhecimento da mesma.
A explicação para a discrepância de valores associada á utilização de ácido fluorídrico
durante a etapa de limpeza, prende-se aparentemente com a formação de ligações de hidrogénio (Si
- H) na superfície de silício, que baixam o valor de energia de superfície do silício, tornando-o mais
hidrofóbico [12, 91]. Contudo este estado de superfície é apenas estável entre algumas horas e
centenas de dias [91].
De modo a caracterizar em detalhe o efeito do envelhecimento das superfícies de silício bem
como o efeito de limpeza com ácidos, foram realizadas medidas de espectroscopia de fotoelectrões.
Para efeito de comparação entre processos, processamento LASER e implantação iónica, foram
realizadas medidas de espectrometria de retrodispersão de Rutherford. Os resultados encontram-se
presentes na secção seguinte.

54
3.3 Resultados de Espectrometria de Superfícies
3.3.1 Espectroscopia de fotelectrões
De modo a caracterizar o efeito de envelhecimento sobre as amostras processadas, realizou-
se análise de XPS. Foram preparadas duas amostras processadas por LASER dois dias antes da
análise em questão. Os parâmetros experimentais utilizados foram os da Tabela 2. As amostras
processadas tinham uma dimensão de 5x5 mm2. Para a análise de XPS, uma das amostras foi
submetida à etapa de limpeza com ácidos enquanto a outra não. A terceira amostra analisada foi um
fragmento sujeito à etapa de limpeza com ácidos mais de um mês antes da análise de XPS. As
Figura 41, Figura 42 e Figura 43 apresentam os espectros de XPS obtidos para estas amostras.
Figura 41. Espectro de XPS da amostra texturada a LASER limpa com ácidos (a) espectro na gama dos [95-110] eV, (b)
espectro na gama dos [525-540] eV.
Figura 42. Espectro de XPS da texturada por LASER e limpa com ácidos um mês antes da análise de XPS (a) espectro na
gama dos [95-110] eV, (b) espectro na gama dos [525-540] eV.

55
Figura 43. Espectro de XPS da amostra texturada a LASER sem limpeza com ácidos antes dos ensaios de XPS (a) espectro
na gama dos [95-110] eV, (b) espectro na gama dos [525-540] eV.
Os espectros de XPS presentes nas Figura 41, Figura 42, e Figura 43 encontram-se cortados
em termos de escala segundo o eixo das energias de ligação, adoptou-se esta medida para se obter
uma melhor visualização dos picos presentes. Não se encontram presentes os picos referentes ao
carbono, considerou-se que eram referentes a contaminações. A Tabela 4 apresenta a identificação
dos picos para cada uma das amostras.
Tabela 4. Identificação dos picos e percentagens atómicas obtidas por XPS.
Amostra Pico Presente
Pico de Energia de
Ligação (eV)
Identificação do Pico
% Atómica
R = (%SiO2(Si))/%Si)
A. Texturada c/ ácidos
Si 2P 99,46 Si0 56,82 Si 2P A 102,1 Si (SiO2) 7,22 0,127
O1s C1s
532,6 285
O (SiO2) C (cont)
16,7 19,25
A. Texturada c/ ácidos um mês antes
Si 2P 99,28 Si0 26,51 Si 2P A 102,72 Si (SiO2) 13,09 0,493
O1s C1s
C1s A
532,92 285
286,73
O (SiO2) C (cont) C (cont)
35,92 15,84 8,64
A. Texturada s/ ácidos
Si 2P Si 2P A O1s A O1s C1s
C1s A
99,23 104,83 532,88 534,98 287,12
285
Si0
Si (SiO2) O (SiO2)
O-C(cont) C(cont) C(cont)
3,1 26,56 13,54 39,96 10,2 6,64
8,575
Os espectros das Figura 41, Figura 42 e Figura 43 mostram três picos comuns a todas as
amostras. O pico presente na gama dos 99 eV é referente à presença de silício metálico. Os

56
restantes picos presentes, na gama dos 102 eV e dos 532 eV são referentes à sílica presente na
amostra (o pico do 102eV corresponde à detecção de um electrão removido do silício da sílica, por
sua vez o pico o dos 533-532eV corresponde à remoção de um electrão do oxigénio que compõe a
sílica). Para a amostra recentemente tratada sem ácidos, observa-se a presença de um pico a mais
em relação às restantes amostras, na gama de energias de 534,98 eV referente ao oxigénio. Com
base na referência [92] verifica-se que para esta gama de energias, está associada a compostos de
hidrocarbonetos do tipo C-O ou água. Estes resultados sugerem que a amostra apresenta a sua
superfície alterada, quer por contaminações quer por absorção química ou física de água, uma vez
que a amostra em questão não foi sujeita à etapa de limpeza com ácidos.
Com base nos valores da última coluna da Tabela 4, correspondentes à razão entre
percentagens do pico de silício referente ao óxido e o pico referente ao silício metálico, é possível
estabelecer uma comparação em termos qualitativos acerca da taxa da oxidação superficial. Deste
modo, com base nos valores dos quocientes da Tabela 4, verifica-se que a amostra recentemente
processada a LASER e tratada com ácidos apresenta o menor valor entre as amostras, o que parece
corresponder a uma superfície menos oxidada, seguindo-se a amostra envelhecida e a amostra
recente que não sofreu tratamento com ácidos, apresentando maior valor de quociente. Estes dados
indiciam fortemente que o tratamento com ácidos promove efectivamente uma redução da quantidade
de óxido superficial, reduzindo o valor do quociente de 8,57 para 0,127. Em relação ao valor do
quociente para a amostra texturada sem ácidos, 8,57, será necessário ter em conta que, uma vez que
existe aproximadamente 40% de oxigénio atribuído a contaminações e ou água adsorvida à
superfície, será plausível que este valor de certa forma se encontre inflacionado, uma vez que a
presença destes compostos pode diminuir a detecção de silício metálico (Si0), tendo em conta a
profundidade de análise desta técnica.
O efeito da remoção da camada de óxido sobre o comportamento à molhabilidade das
amostras foi posteriormente comprovado com a realização de medidas de molhabilidade sobre as
amostras processadas por LASER recentemente, com e sem ácidos, analisadas anteriormente em
XPS. Sobre estas amostras realizou-se uma medida de molhabilidade, tendo-se obtido no caso da
amostra tratada com ácidos um ângulo de 125º, Figura 44b) enquanto para a amostra tratada sem
ácidos o seu ângulo foi de 57º, Figura 44a), ficando comprovada a influência da camada de óxido (e
de eventuais contaminações da superfície) sobre o comportamento à molhabilidade do silício.
Figura 44. (a) Gota obtida sobre a amostra texturada e analisada em XPS sem ácidos, (b) gota obtida sobre a amostra
texturada e analisda em XPS tratada com ácidos.
a) b)

57
3.3.2 Espectrometria de Retrodispersão de Rutherford
Foram efectuados espectros de RBS de algumas amostras processadas por LASER, de uma
amostra implantada e da amostra implantada e posteriormente processada a LASER, de forma a
entender os efeitos dos processos sobre as amostras de silício. Realizou-se em simultâneo um
espectro de uma amostra virgem (sem qualquer tipo de tratamento) para termos comparativos. Os
resultados obtidos encontram-se presentes nos seguintes gráficos:
100 200 300 400 500 6000
500
1000
Con
tage
ns
Canal
<110> Random
Si
Amostra Virgemχ
ΜΙΝ=2,78%
450 600 750 900 1050 1200
Energia(KeV)
Figura 45. Espectro de retrodispersão de Rutherford de uma amostra virgem obtido com um feixe de 4He+ de 2 MeV de
energia
100 200 300 400 500 6000
500
1000
Con
tage
ns
Canais
<110> Random(θ=50º)
400 600 800 1000 1200
Energia (Kev)
Amostra A3
Si
χΜΙΝ
=25,7%
Figura 46. Espectro de retrodispersão de Rutherford da amostra 3 processada a LASER obtido com feixe de 4He+ de 2 MeV
de energia

58
100 200 300 400 500 6000
2000
4000400 600 800 1000 1200
Con
tage
ns
Canal
Random(θ=50º) <110>
Amostra implantada Si+
Energia(KeV)
Si
Figura 47. Espectro de retrodispersão de Rutherford de uma amostra virgem implantada obtido com um feixe de 4He+ de 2
MeV de energia
100 200 300 400 500 6000
500
1000
1500400 600 800 1000 1200
Con
tage
ns
Canal
Random(θ=46.6º) <110>
Amostra Implantada + Laserχ
ΜΙΝ= 30,7%
Energia(keV)
Figura 48. Espectro de retrodispersão de Rutherford de uma amostra implantada e posteriormente processada a LASER
obtido com um feixe de 4He+ de 2 MeV de energia
Para todas as amostras foram obtidos espectros de retrodispersão segunda uma direcção
aleatória, random, e segundo uma direcção de canalização, mais concretamente o eixo <110>. Os
espectros obtidos de todas as amostras evidenciam a presença de um único elemento para um canal
próximo de 440, correspondente ao silício. Em relação ao espectro da amostra virgem Figura 45, foi
calculado para um intervalo de canais correspondente a [351 – 376] o valor de χmin, tendo-se obtido
um valor de 2,5%. Este valor é ligeiramente superior ao valor teórico, aproximadamente 1%, o que
indica que foi utilizado um cristal de silício de boa qualidade.
Em relação às amostras processadas a LASER, apenas se apresenta o espectro relativo à
amostra 3. Os restantes espectros eram em tudo semelhantes ao apresentado, não acrescentando

59
nada de novo. Observando a Figura 46, referente ao espectro da amostra 3, verifica-se que não
existe sobreposição entre o espectro alinhado e aleatório, o que mostra que após o processamento
LASER o material ainda se encontra num estado cristalino. Contudo comparando o valor de χmin é
bastante ao superior ao de χmin da amostra de referência o que indica que o processamento LASER
alterou de forma significativa a qualidade inicial do cristal.
Em relação ao processo de implantação iónica, observa-se a existência de uma zona de
sobreposição entre os respectivos espectros alinhado e aleatório - Figura 47. Verifica-se portanto,
que o processo de implantação iónica induziu a formação de uma camada amorfa na superfície das
amostras. Através da Equação 28, com base na largura a meia altura (ΔE), e o poder de paragem do
silício é possível determinar uma espessura para a camada amorfa da ordem dos 213 nm. Uma vez
que todas as amostras foram implantadas em simultâneo, ou seja, com os mesmos parâmetros,
podemos esperar a mesma espessura de camada amorfa nas restantes amostras implantadas.
Este facto poderá explicar em alguma parte a variação de resultados observados na Figura
36. A redução dos ângulos de contacto das amostras texturadas e a seguir implantadas estará
associada à presença da camada amorfa, visto ser o elemento diferenciador entre as mesmas. É
plausível assumir que a variação do grau de cristalinidade terá alterado o valor da tensão superficial
do silício, o que explicaria uma redução dos ângulos das amostras A2 e A4. No entanto, o facto de a
redução ser demasiado acentuada, e pela observação do aumento do valor do ângulo de contacto da
amostra virgem após implantação, pode ser indiciador que a variação da tensão superficial poderá
não ser o único mecanismo a exercer efeito sobre as medidas de molhabilidade, posteriormente à
implantação, sendo necessária mais investigação neste campo.
Em relação ao espectro correspondente à amostra implantada e posteriormente processada a
LASER, Figura 48, observa-se a presença de um pico de “descanalização” de superfície.
Comparando com o espectro anterior, Figura 47, verifica-se que o processamento LASER promoveu
a recristalização da superfície amorfa, mas não completamente, visto ser ainda visível na Figura 47 a
presença de um pico, segundo o espectro alinhado correspondente a uma superfície não perfeita. O
valor de χmin desta amostra é de 30 %, valor próximo do obtido da amostra 3 (25%).
O valor do ângulo de contacto desta amostra é o mais baixo diante das amostras texturadas,
embora exiba o mesmo tipo de estruturas que as restantes processadas a LASER, sendo esperado
portanto um ângulo de contacto superior. A diferença para as restantes amostras texturadas reside na
superfície, que se encontra mais defeituosa. A explicação para a obtenção de um valor tão baixo de
ângulo de contacto, estará associada á diminuição da qualidade cristalina da superfície, sendo
necessário tal como anteriormente, mais investigação.

60
Capitulo IV - Conclusões e Trabalho Futuro
4.1 Conclusões
Durante a realização do presente trabalho de Dissertação de Mestrado em Engenharia de
Materiais foram estudados dois diferentes mecanismos para funcionalização de superfícies de silício:
texturização a LASER e implantação iónica. O principal objectivo era o de tornar as superfícies de
silício o mais hidrofóbicas possíveis após a funcionalização.
Os resultados obtidos através da texturização e implantação permitiram retirar as seguintes
conclusões:
1. A texturização de superfícies de silício por laser revelou-se em primeira análise um excelente
processo para o efeito pretendido. Enquanto que o silício não processado apresenta ângulos
de contacto de cerca 60º, as amostras processadas por LASER apresentam ângulos de
contacto compreendidos entre os 90 e aproximadamente 130º após tratamento com ácidos.
2. No entanto, medidas de molhabilidade realizadas sobre os mesmos substratos algum tempo
depois, revelaram um decréscimo do valor de ângulo de contacto de cerca 30 - 40 %. Uma
análise de espectroscopia de fotoelectrões revelou que a camada de óxido vai crescendo
progressivamente após a etapa de limpeza, factor explicativo da diminuição do valor do
ângulo de contacto. Deste modo é possível concluir que, uma vez que as superfícies
texturadas não apresentam um comportamento estável, esta metodologia, por si só, não será
eficaz para a resolução dos problemas de adesão por capilaridade de componentes
fabricados em Si.
3. Em relação ao segundo processo utilizado, implantação iónica, os resultados apresentam
uma natureza antagónica. Por um lado, obteve-se um aumento do ângulo do contacto em
relação à amostra de referência (embora pequeno: 10º), por outro lado verifica-se que a
implantação de silício sobre silício texturado anula o efeito da texturização no ângulo de
contacto.
4. As amostras texturadas e posteriormente implantadas revelaram um decréscimo acentuado
no valor do ângulo de contacto, passando de valores da ordem dos 115 - 120º para valores
de 60 - 80º. Mesmo a texturização de uma amostra de referência implantada, apesar de
apresentar o mesmo tipo de estruturas que as restantes amostras texturadas a LASER,
apresentou um baixo valor de ângulo de contacto de 80º. Uma análise de espectroscopia de
retrodispersão de Rutherford revelou que a implantação iónica criou uma superfície amorfa
com uma espessura de aproximadamente 213 nm.
5. A alteração dos valores dos ângulos de contacto das amostras implantadas estará associada
eventualmente à modificação do grau de cristalinidade do silício, sendo necessário
aprofundar mais este estudo. Nenhuma das amostras implantadas possibilitou a obtenção de
superfícies hidrofóbicas (θ > 90º). Deste modo é plausível concluir que a implantação de
silício sobre silício não é uma boa opção para efeitos de hidrofobização de superfícies.
61
4.2 Trabalho a Realizar no Futuro
No campo da texturização de superfícies com LASER, existem ainda um conjunto de
trabalhos que podem ser realizados de modo permitir compreender melhor os efeitos da morfologia
das superfícies e do observado efeito de envelhecimento. Uma abordagem seria a realização de
medições diárias de ângulos de contacto, durante um período longo, aproximadamente um mês, e
observar a evolução diária dos ângulos de contacto. Juntamente com esta análise, seria interessante
medir a espessura de óxido em função do mesmo tempo. Em relação às análises de XPS realizadas,
seria interessante realizar novamente as mesmas medidas, e verificar a sua reprodutibilidade, mais
concretamente, verificar se o segundo pico do oxigénio se mantém sobre as amostras texturas sem
limpeza com ácidos. Outro aspecto interessante a estudar seria estudar o efeito do processo de
limpeza sobre a tensão superficial das amostras. Ainda dentro do campo da texturização LASER será
interessante explorar outras abordagens, por exemplo, o revestimento do silício com compostos mais
estáveis como polímeros, e processar esses mesmos revestimentos, obviando assim problema do
envelhecimento.
Em relação ao processo de implantação iónica, existe ainda um grande “gap” que necessita
de ser preenchido. Falo concretamente da inexistência de estudos molhabilidade relacionados com
implantação iónica. Será necessário alargar o reduzido espectro de iões implantados. Dentro do
campo da implantação iónica, será interessante também estudar mais aprofundadamente o efeito da
amorfização, com realização de medições de molhabilidade e estudo da variação da tensão
superficial, algo não realizado na presente tese mas que poderia ter possibilitado uma melhor
caracterização das superfícies amorfas obtidas.

62
Referências 1. Achanta, S. and J.P. Celis, Nanotribology of MEMS/NEMS, . Fundamentals of Friction and
Wear on the Nanoscale, Meyer, E. Gnecco, E. 2006: Springer-Verlag. 2. Gad-el-Hak, M., MEMS Applications. Second Edition ed. The MEMS Handbook. 2006: Taylor
& Francis Group. 3. [cited 02/08/08]; Available from: http://mems.sandia.gov/gallery/images/sg6.jpg. 4. Peterson, K. New age for MEMS. in Solid-State Sensores, Actuators and Mycrosystems.
2005. Seoul, Korea: IEEE. 5. Walraven, J.A., Failure Mechanisms in MEMS. Proceddings of ITC international conference,
IEEE, papper 33.1, 2003. 6. Bhushan, B., Tribology Issues and Opportunities in MEMS. 1998, Dordrecht: Kluwer
Academic Publishers. 7. Sniegowski, J.J., Tribological Issues of Polysilicon Surface-Micromachining. Tribology Issues
and Opportunities in MEMS,Bhushan, B. 1998, Dordrecht: Kluwer Academic Publishers. 8. Luo, J.K., et al., Diamond and diamond-like carbon MEMS. Journal of Micromechanics and
Microengineering, 2007. 17(7): p. S147-S163. 9. Spengen, W.M., MEMS reliability from a failure mechanisms prespective. Microelectronics
Reliability, 2003(43): p. 1049-1060. 10. Zou, M., L. Cai, and H. Wang, Adhesion and friction studies of a nano-textured surface
produced by spin coating of colloidal silica nanoparticle solution. Tribology Letters, 2006. 21(1): p. 25-30.
11. Tayebi, N. and A.A. Polycarpou, Reducing the effects of adhesion and friction in
microelectromechanical systems (MEMSs) through surface roughening: Comparison between theory and experiments. Journal of Applied Physics, 2005. 98(7): p. -.
12. Zhuang, Y.X. and A. Menon, On the stiction of MEMS materials. Tribology Letters, 2005.
19(2): p. 111-117. 13. Zhuang, Y.X., et al., Vapor-phase self-assembled monolayers for anti-stiction applications in
MEMS. Journal of Microelectromechanical Systems, 2007. 16(6): p. 1451-1460. 14. Sun, R., T. Xu, and Q.J. Xue, Effect of Ar+ ion implantation on the nano-mechanical properties
and microstructure of single crystal silicon. Applied Surface Science, 2005. 249(1-4): p. 386-392.
15. Zou, M., et al., Adhesion and friction studies of a selectively micro/nano-textured surface
produced by UV assisted crystallization of amorphous silicon. Tribology Letters, 2005. 20(1): p. 43-52.
16. Zorba, V., et al., Making silicon hydrophobic: wettability control by two-lengthscale
simultaneous patterning with femtosecond laser irradiation. Nanotechnology, 2006. 17(13): p. 3234-3238.
17. Kahng, B., H. Jeong, and A.L. Barabasi, Quantum dot and hole formation in sputter erosion.
Applied Physics Letters, 2001. 78(6): p. 805-807.
63
18. Frost, F., et al., Surface engineering with ion beams: from self-organized nanostructures to ultra-smooth surfaces. Applied Physics a-Materials Science & Processing, 2008. 91(4): p. 551-559.
19. Groenendijk, M.N.W. and J. Meijer, Surface microstructures obtained by femtosecond laser
pulses. Cirp Annals-Manufacturing Technology, 2006. 55(1): p. 183-186. 20. Murillo, R., et al., Fabrication of patterned magnetic nanodots by laser interference
lithography. Microelectronic Engineering, 2005. 78-79: p. 260-265. 21. Yoon, E.S., et al., Tribological properties of bio-mimetic nano-patterned polymeric surfaces on
silicon wafer. Tribology Letters, 2006. 21(1): p. 31-37. 22. Younkin, R., et al., Infrared absorption by conical silicon microstructures made in a variety of
background gases using femtosecond-laser pulses. Journal of Applied Physics, 2003. 93(5): p. 2626-2629.
23. Zorba, V., et al., Laser microstructuring of Si surfaces for low-threshold field-electron
emission. Thin Solid Films, 2004. 453-54: p. 492-495. 24. Sanchez, F., et al., Whiskerlike structure growth on silicon exposed to ArF: Excimer laser
irradiation. Applied Physics Letters, 1996. 69(5): p. 620-622. 25. Her, T.H., et al., Microstructuring of silicon with femtosecond laser pulses. Applied Physics
Letters, 1998. 73(12): p. 1673-1675. 26. Lowndes, D.H., J.D. Fowlkes, and A.J. Pedraza, Early stages of pulsed-laser growth of silicon
microcolumns and microcones in air and SF6. Applied Surface Science, 2000. 154: p. 647-658.
27. Sanchez, F., J.L. Morenza, and V. Trtik, Characterization of the progressive growth of
columns by excimer laser irradiation of silicon. Applied Physics Letters, 1999. 75(21): p. 3303-3305.
28. Her, T.H., et al., Femtosecond laser-induced formation of spikes on silicon. Applied Physics a-
Materials Science & Processing, 2000. 70(4): p. 383-385. 29. Pedraza, A.J., J.D. Fowlkes, and D.H. Lowndes, Laser ablation and column formation in
silicon under oxygen-rich atmospheres. Applied Physics Letters, 2000. 77(19): p. 3018-3020. 30. Pedraza, A.J., et al., Surface micro-structuring of silicon by excimer-laser irradiation in reactive
atmospheres. Applied Surface Science, 2000. 168(1-4): p. 251-257. 31. Jesse, S., et al., Etching-enhanced ablation and the formation of a microstructure in silicon by
laser irradiation in an SF6 atmosphere. Journal of Materials Research, 2002. 17(5): p. 1002-1013.
32. Shen, M.Y., et al., Femtosecond laser-induced formation of submicrometer spikes on silicon in
water. Applied Physics Letters, 2004. 85(23): p. 5694-5696. 33. Hommes, V., M. Miclea, and R. Hergenroder, Silicon surface morphology study after exposure
to tailored femtosecond pulses. Applied Surface Science, 2006. 252(20): p. 7449-7460. 34. Tull, B.R., et al., Silicon surface morphologies after femtosecond laser irradiation. Mrs Bulletin,
2006. 31(8): p. 626-633. 35. Shen, M., et al., High-density regular arrays of nanometer-scale rods formed on silicon
surfaces via femtosecond laser irradiation in water. Nano Letters, 2008. 8(7): p. 2087-2091.

64
36. Oliveira, V.M.B., Estruturas e Propriedades de Materiais Cerâmicos Micromaquinados por Laser. 2002, Instituto Superior Técnico.
37. Sanchez, F., et al., Dynamics of the hydrodynamical growth of columns on silicon exposed to
ArF excimer-laser irradiation. Applied Physics a-Materials Science & Processing, 1998. 66(1): p. 83-86.
38. Pedraza, A.J., J.D. Fowlkes, and D.H. Lowndes, Silicon microcolumn arrays grown by
nanosecond pulsed-excimer laser irradiation. Applied Physics Letters, 1999. 74(16): p. 2322-2324.
39. Crouch, C.H., et al., Comparison of structure and properties of femtosecond and nanosecond
laser-structured silicon. Applied Physics Letters, 2004. 84(11): p. 1850-1852. 40. Silfvast, W.T., Laser Fundamentals. 1996: Cambridge University Press. 41. [cited 15/07/08]; Available from:
http://www.paultownsend.co.uk/research/fundamentals/laser-fundamentals/. 42. Luxon, J.T. and D.E. Parker, Industrial Lasers and Their Applications. 1992: Prentice – Hall. 43. Williams, J.S., Ion implantation of semiconductors. Materials Science and Engineering a-
Structural Materials Properties Microstructure and Processing, 1998. 253(1-2): p. 8-15. 44. Liu, Y.Z., et al., Improvement of tribological behavior of a Ti-Al-Zr alloy by nitrogen ion
implantation. Nuclear Instruments & Methods in Physics Research Section B-Beam Interactions with Materials and Atoms, 2006. 248(1): p. 42-46.
45. Foerster, C.E., et al., Carbon ion implantation into aluminium: Mechanical and tribological
properties. Surface & Coatings Technology, 2006. 200(18-19): p. 5210-5219. 46. Werner, Z., et al., The effect of ion implantation on the wear of Co-Cr-Mo alloy. Vacuum, 2007.
81(10): p. 1191-1194. 47. Zhao, Q., et al., Reduction of bacterial adhesion on ion-implanted stainless steel surfaces.
Medical Engineering & Physics, 2008. 30(3): p. 341-349. 48. Baszkiewicz, J., et al., The effect of sodium-ion implantation on the properties of titanium.
Journal of Materials Science-Materials in Medicine, 2008. 19(9): p. 3081-3091. 49. Shabalovskaya, S., J. Anderegg, and J. Van Humbeeck, Critical overview of Nitinol surfaces
and their modifications for medical applications. Acta Biomaterialia, 2008. 4(3): p. 447-467. 50. da Silva, L.L.G., et al., Corrosion behavior of Ti-6Al-4V alloy treated by plasma immersion ion
implantation process. Surface & Coatings Technology, 2007. 201(19-20): p. 8136-8139. 51. Wang, X.M., et al., The corrosion behavior of Ce-implanted magnesium alloys. Materials
Characterization, 2008. 59(5): p. 618-623. 52. Ryssel, H. and I. Ruge, Ion implantaion. Vol. 1: John Wiley & Sons Lda. 53. Zhou, W., et al., Fundamentals of Scanning Electron Microscopy. 2007, New York: Springer. 54. G. Joseph, et al., Electron Microscopy and X – Ray Microgranalysis. 2003, New York:
Springer. 55. Nogueira, I.C.R.D., Falhas de Empilhamento Complexas e de Super-Rede Num Sistema
Hexagonal Ordenado Um Estudo de Microscopia Electrónica de Transmissão. 2004.

65
56. Ludwing, R., Scanning Electron Microscopy, Physics of Image Formation and Microanalysis. Spinger Series in Optical Sciences, ed. P.W. Hawkes. 1985, Berlin: Springer – Verlag.
57. Cahn, R.W. and P. Haasen, Physical Metallurgy. 4 ed. Vol. 2. 1996: Ed., North-Holland,
Amsterdam. 58. Goodhew, P.J. and F.J. Humphreys, Electron Microscopy and Analysis. Second ed. 1988:
Taylor & Francis. 59. Wiesendanger, R., Scanning Probe Microscopy and Spectrometry. 1994: Cambridge
University Press. 60. [cited 03/06/08]; Available from: http://www.ntmdt.com/spm-principles/view/non-contact-
techniques. 61. [cited 8/9/2008]; Available from: http://www.ntmdt.com/spm-basics/view/probe-sample-
interaction-potential. 62. Barnes, G.T. and I.R. Gentle, Interfacial Science an Introduction. 2005: Oxford University
Press. 63. [cited 05/06/08]; Available from: http://www.ramehart.com/goniometers/contactangle.htm. 64. Serro, A.P.V.A., Biomineralização de materiais de implante: estudos de molhabilidade. 2001,
Instituto Superior Técnico. 65. Butt, H.J., K. Graf, and M. Kappl, Physics and Chemistry of Interfaces. 2006: WILEY – VCH. 66. Patankar, N.A., On the modeling of hydrophobic contact angles on rough surfaces. Langmuir,
2003. 19(4): p. 1249-1253. 67. Wenzel, R.N., Resistance of solid surfaces to wetting by water. Industrial and Engineering
Chemistry, 1936. 28: p. 988-994. 68. Adamson, A.W. and A.P. Gast, Physical Chemistry of Surfaces. 6 ed. 1990: John Wiley &
Sons, Inc. 69. Cassie, A.B.D. and S. Baxter, Wettability of porous surfaces. Transactions of the Faraday
Society, 1944. 40: p. 0546-0550. 70. Baldacchini, T., et al., Superhydrophobic surfaces prepared by microstructuring of silicon
using a femtosecond laser. Langmuir, 2006. 22(11): p. 4917-4919. 71. Barbieri, L., E. Wagner, and P. Hoffmann, Water wetting transition parameters of
perfluorinated substrates with periodically distributed flat-top microscale obstacles. Langmuir, 2007. 23(4): p. 1723-1734.
72. He, B., N.A. Patankar, and J. Lee, Multiple equilibrium droplet shapes and design criterion for
rough hydrophobic surfaces. Langmuir, 2003. 19(12): p. 4999-5003. 73. Cheng, P., et al., Automation of Axisymmetric Drop Shape-Analysis for Measurement of
Interfacial-Tensions and Contact Angles. Colloids and Surfaces, 1990. 43(2-4): p. 151-167. 74. Cheng, P. and A.W. Neumann, Computational Evaluation of Axisymmetrical Drop Shape
Analysis-Profile (Adsa-P). Colloids and Surfaces, 1992. 62(4): p. 297-305. 75. Gomes, M.C., et al., Influence of the Wettability of Silicon Substrates on the Thickness of Sol-
Gel Silica Films. Journal of Materials Science, 1995. 30(15): p. 3893-3896. 76. Wachatman, J.B., Characterization of Materials. 1993: Butterworth – Heinemann.
66
77. [cited 10/07/08]; Available from:
http://www.tut.fi/index.cfm?MainSel=10775&Sel=11345&Show=14209&Siteid=119. 78. ASM Metals Handbook, volume 10 Characterization of Materials 9ª ed. Vol. volume 10
Characterization of Materials. 79. [cited 10/06/08]; Available from: http://nsr.mij.mrs.org/10/5/complete.html. 80. Chu, W.-K., M. Nicolet, and J.V. Mayer, Backscattering Spectrometry. 1978: Academic Press. 81. Magalhães, S.N., Estudo de ilhas quânticas semicondutoras. 2007, intituto Superior
Técnico/Instituto Tecnológico Nuclear: Lisboa. 82. Guillermin, M., et al., Single- and multi-pulse formation of surface structures under static
femtosecond irradiation. Applied Surface Science, 2007. 253(19): p. 8075-8079. 83. Tan, B. and K. Venkatakrishnan, A femtosecond laser-induced periodical surface structure on
crystalline silicon. Journal of Micromechanics and Microengineering, 2006. 16(5): p. 1080-1085.
84. Young, J.F., et al., Laser-Induced Periodic Surface-Structure .2. Experiments on Ge, Si, Al,
and Brass. Physical Review B, 1983. 27(2): p. 1155-1172. 85. Dolgaev, S.I., et al., Formation of conical microstructures upon laser evaporation of solids.
Applied Physics a-Materials Science & Processing, 2001. 73(2): p. 177-181. 86. Singh, A.P., et al., Laser damage studies of silicon surfaces using ultra-short laser pulses.
Optics and Laser Technology, 2002. 34(1): p. 37-43. 87. Zorba, V., et al., Tailoring the wetting response of silicon surfaces via fs laser structuring, DOI
10.1007/s00339-008-4757-y. Applied Physics a-Materials Science & Processing, 2008. 88. Ueda, M., et al., Nanohardness and contact angle of Si wafers implanted with N and C and Al
alloy with N by plasma ion implantation. Surface & Coatings Technology, 2002. 156(1-3): p. 190-194.
89. Wan, G.J., et al., Surface wettabilly of nitrogen plasma-implanted silicon. Nuclear Instruments
& Methods in Physics Research Section B-Beam Interactions with Materials and Atoms, 2006. 242(1-2): p. 296-299.
90. Morita, M., et al., Growth of Native Oxide on a Silicon Surface. Journal of Applied Physics,
1990. 68(3): p. 1272-1281. 91. Scherge, M., X. Li, and J.A. Schaefer, The effect of water on friction of MEMS. Tribology
Letters, 1999. 6(3-4): p. 215-220. 92. 2008 [cited 7/09/08]; Available from: http://www.lasurface.com/database/liaisonxps.php.