frieos
36
CURSO DE ENGENHARIA INDUSTRIAL MECÂNICA DISCIPLINA PROJETO FINAL II DIMENSIONAMENTO DE FREIOS A DISCO PARA APLICAÇÃO AUTOMOBILÍSTICA TRABALHO DE CONCLUSÃO DE CURSO CURITIBA 2010 DIMENSIONAMENTO DE FREIOS A DISCO PARA APLICAÇÃO AUTOMOBILÍSTICA Monografia apresentada à disciplina Projeto Final II, do Curso de Engenharia Industrial Mecânica da Universidade Tecnológica Federal do Paraná, Campus Curitiba, como requisito parcial para aprovação. Orientador: Prof. CURITIBA 2010 TERMO DE ENCAMINHAMENTO Orientador: Prof. Curitiba, 17 de Novembro de 2010. RESUMO Um item obrigatório em todos os veículos automotivos é o freio, pois sua função de frenagem em uso normal e de emergência faz parte do sistema de segurança dos ocupantes desses carros. Dessa forma é necessário um dimensionamento adequado do sistema de freio levando em consideração todos os parâmetros envolvidos na construção e utilização de um veículo. Nota-se uma carência no estudo detalhado desse tema na grade curricular do curso de Engenharia Industrial Mecânica da UTFPR. Igualmente consta-se a falta de informações para o dimensionamento de sistemas de freios nos projetos BAJA e Fórmula SAE da UTFPR. Assim neste trabalho foi apresentada uma metodologia de dimensionamento de freios a disco e gerado um programa de computador que realiza esse dimensionamento e outros cálculos relevantes. Para isso foi realizada uma revisão bibliográfica desse conteúdo e estudos de caso focando principalmente os protótipos do BAJA e formula SAE. Com os resultados obtidos foi possível confirmar os dados obtidos na teoria com a prática. Além disso, a possibilidade de realizar uma série de cálculos rapidamente utilizando o programa de computador, alcançou os objetivos propostos deste projeto.
-
Upload
leonardo-melo -
Category
Documents
-
view
197 -
download
3
Transcript of frieos

CURSO DE ENGENHARIA INDUSTRIAL MECÂNICA
DISCIPLINA PROJETO FINAL II
DIMENSIONAMENTO DE FREIOS A DISCO PARA APLICAÇÃO
AUTOMOBILÍSTICA
TRABALHO DE CONCLUSÃO DE CURSO
CURITIBA
2010
DIMENSIONAMENTO DE FREIOS A DISCO PARA APLICAÇÃO
AUTOMOBILÍSTICA
Monografia apresentada à disciplina Projeto Final II, do Curso de Engenharia Industrial
Mecânica da Universidade Tecnológica Federal do Paraná, Campus Curitiba, como
requisito parcial para aprovação.
Orientador: Prof.
CURITIBA
2010
TERMO DE ENCAMINHAMENTO
Orientador: Prof.
Curitiba, 17 de Novembro de 2010.
RESUMO
Um item obrigatório em todos os veículos automotivos é o freio, pois sua função de
frenagem em uso normal e de emergência faz parte do sistema de segurança dos
ocupantes desses carros. Dessa forma é necessário um dimensionamento adequado do
sistema de freio levando em consideração todos os parâmetros envolvidos na construção
e utilização de um veículo. Nota-se uma carência no estudo detalhado desse tema na
grade curricular do curso de Engenharia Industrial Mecânica da UTFPR. Igualmente
consta-se a falta de informações para o dimensionamento de sistemas de freios nos
projetos BAJA e Fórmula SAE da UTFPR. Assim neste trabalho foi apresentada uma
metodologia de dimensionamento de freios a disco e gerado um programa de
computador que realiza esse dimensionamento e outros cálculos relevantes. Para isso foi
realizada uma revisão bibliográfica desse conteúdo e estudos de caso focando
principalmente os protótipos do BAJA e formula SAE. Com os resultados obtidos foi
possível confirmar os dados obtidos na teoria com a prática. Além disso, a possibilidade
de realizar uma série de cálculos rapidamente utilizando o programa de computador,
alcançou os objetivos propostos deste projeto.

Palavras-chave: Freio. Dimensionamento. Metodologia. Programa de computador.
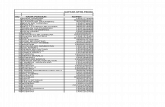
SUMÁRIO
SUMÁRIO
1 INTRODUÇÃO 11
1.1 Contexto 12
1.2 Problema 12
1.3 Objetivos 13
1.4 Justificativa 13
1.5 Conteúdo do trabalho 13
2 METODOLOGIA 14
2.1 Descrição da metodologia 14
2.2 Justificativa da metodologia 14
2.3 Produtos do projeto 15
2.4 Etapas do projeto 15
2.5 Cronograma 18
3 fundamentação teórica 20
3.1 Sistemas de frenagem automotiva 23
3.2 Análise do Acionamento do Sistema Hidráulico 27
3.2.1 Ganho de força por via hidráulica. 30
3.2.2 Interface pastilha/disco. 32
3.2.3 Interface pneu / solo. 33
3.3 Reta real da distribuição das forças de frenagem promovidas pelo sistema
hidráulico: 35
3.4 Mecânica da frenagem 37
3.4.1 Força de frenagem, contrário ao movimento de translação do veículo. 37
3.4.2 Resistência Aerodinâmica 44
3.4.3 Resistência ao arrasto 46
3.4.4 Força de sustentação aerodinâmica (força de levantamento para veículos) 49
3.4.5 Resistência ao Rolamento 50
3.4.6 Resistência ao Aclive 53
3.5 Curva ideal de distribuição de forcas generalizadas durante a frenagem 56
3.6 Gráfico da distribuição das forças de frenagem nos eixos dianteiros e traseiros: 62
3.7 Relação entre a curva real versus ideal: 64
4 Resultados 66
4.1 Desenvolvimento do Algoritmo. 66
4.2 Programa 69
4.2.1 Apresentação do programa 70
5 CONCLUSÕES 100
REFERÊNCIA 101
LISTA DE FIGURAS
Figura 2.1 Cilindro-mestre do BAJA 2010 UTFPR 16
Figura 2.2 - Pedal do BAJA 2010 UTFPR 17
Figura 2.3 - Disco de freio do BAJA 2010 UTFPR. 18
Figura 3.1 Diagrama de corpo livre do pneu em contato com a pista 21
Figura 3.2 Sistema de freio a tambor [BOSCH, 2010] 23
Figura 3.3 Visão geral do sistema de frenagem [LAWRENCE,1997] 24
Figura 3.4 Pedal de freio 24
Figura 3.5 Cilindro-mestre [BOSCH, 2010] 25

Figura 3.6 Pinça e disco de freio [BOSCH, 2010] 25
Figura 3.7 Disco de freio [BOSCH, 2010] 26
Figura 3.8 Pastilhas de freio [BOSCH, 2010] 26
Figura 3.9 Diagrama de corpo livre do pedal 27
Figura 3.10 Razão de proporção do pedal de freio do BAJA UTFPR 2010 28
Figura 3.11 Diagrama de corpo livre no interior do sistema formado pelo cilindro
mestre 29
Figura 3.12 Corte transversal do sistema de frenagem a disco. 31
Figura 3.13 Ponto de aplicação da força normal sobre o disco 33
Figura 3.14 Deformação do pneu durante contato com o solo 35
Figura 3.15 Relação solo-pneu para condição de adesão de
escorregamento [GILLESPIE, 1992] 38
Figura 3.16 Comportamento de um pneu sem perfil, em diferentes velocidades, em uma
pista com lâmina de água [NICOLAZZI, 2008] 43
Figura 3.17 Diagrama de corpo livre das forças aerodinâmicas em um veículo 45
Figura 3.18 Coeficiente de arrasto em função da geometria [GILLESPIE, 1992] 48
Figura 3.19 Coeficiente de arrasto e sustentação em função da geometria
[GILLESPIE,1992] 50
Figura 3.20 Diagrama de corpo livre das forças de resistência ao rolamento em um
veículo. 51
Figura 3.21 Diagrama de corpo livre das reações de apoio do contato pneu/solo em um
veículo. 53
Figura 3.22 Diagrama de corpo livre de um carro sob uma rampa [NICOLAZZI,2008]
55
Figura 3.23 Definição de aclive de 40% (tangente(α)=0,4) [NICOLAZZI,2008] 56
Figura 3.24 Diagrama de corpo livre das forças atuantes no veículo [NICOLAZZI,
2008] 57
Figura 4.1 Janela Parâmetro De Dimensionamento 70
Figura 4.2 Janela “Dados do veículo” 71
Figura 4.3 Janela “Resultados” da mecânica da frenagem 71
Figura 4.4 Janela escolha do parâmetro para dimensionamento 72
Figura 4.5 Janela dados do sistema de frenagem aba pedal 73
Figura 4.6 Janela dados do sistema de frenagem aba cilindro-mestre 74
Figura 4.7 Janela dados do sistema de frenagem aba pinça de freio 75
Figura 4.8 Janela dados do sistema de frenagem aba pastilha de freio 75
Figura 4.9 Janela dados do sistema de frenagem aba disco de freio 76
Figura 4.10 Janela dados do sistema de frenagem aba pneu 77
Figura 4.11 Janela resultados e gráfico de distribuição de forças de frenagem 78
Figura 4.12 Tela de abertura do programa de dimensionamento do freio. 80
Figura 4.13 Tela para preenchimento de dados obrigatórios para o cálculo da força de
frenagem devido a interação entre o solo e o pneu. 81
Figura 4.14 Exemplificação após clicar botão “Ok” sem ter feito o preenchimento
correto dos campos obrigatórios. 81
Figura 4.15 Campo para o cálculo das distância entre os eixos e o ponto onde esta
localizado o centro de gravidade do veículo. 82
Figura 4.16 Mostra os valores dos resultados obtidos através dos dados fornecidos pela
janela anterior. 82
Figura 4.17 Escolha do parâmetro para dimensionamento. 83
Figura 4.18 Visualização da aba “Pedal” na janela dos dados do sistema de frenagem.
85

Figura 4.19 Mostruário do campo a ser dimensionado na Aba Pedal 85
Figura 4.20 Aviso de cuidado no preenchimento do campo correspondente a razão de
proporção. 86
Figura 4.21 Mostruário do campo obrigatório a ser preenchido. 86
Figura 4.22 Janela Dados do Sistema de Frenagem Aba Cilindro-Mestre 87
Figura 4.23 Mostruário do dado de entrada e do dado de saída da aba Cilindro-mestre
87
Figura 4.24 Janela Dados do sistema de frenagem,aba Pinça de Freio 88
Figura 4.25 Mostruário do campo Ganho de força 88
Figura 4.26 Campo coeficiente de atrito entre o par disco/pastilha. 89
Figura 4.27 Mostruário da aba disco de freio da janela de dados do sistema de frenagem.
90
Figura 4.28 Campo obrigatório para ser calculada a força do motorista sobre o pedal. 90
Figura 4.29 Mostruário da aba “Pneu” da janela de dados do sistema de frenagem. 91
Figura 4.30 Campo Raio dinâmico do pneu. 91
Figura 4.31 Aba aberta após o acionamento do botão “Calcular”. 92
Figura 4.32 Aba aberta após o acionamento do botão “Calcular” após constados todos
os valores devidamente informados. 93
Figura 4.33 Aba aberta após o acionamento do botão “Calcular”, após constados todos
os valores devidamente informados. 94
Figura 4.34 Mostruário de reprovação do sistema de frenagem aplicado em um BAJA
sendo utilizado por um veículo de grande porte. 94
Figura 4.35 Gráfico gerado pelo programa 95
Figura 4.36 Campo dos selecionadores. 95
Figura 4.37 Mostruário das forças obtidas através do gráfico 3.24. 96
4.38 Relatório total oferecido pelo programa. 97
Figura 4.39 Mostruário dos valores a serem preenchidos para cálculos referente a
pastilha 98
Figura 4.40 Mostruário da seleção de critério e das incógnitas de saída. 99
Figura 4.41 Mostruário dos dados de saída para uma determinada configuração de
pastilha. 99
LISTA DE TABELAS
Tabela 3.1 Coeficiente de atrito para automóveis em vários tipos de
pista [NICOLAZZI, 2008] 42
Tabela 3.2 Coeficiente de atrito para pistas em diversos estados [NICOLAZZI, 2008].
44
Tabela 3.3 Coeficiente de arrasto para alguns veículos nacionais 48
Tabela 3.4 Coeficientes de atrito de rolamento [NICOLAZZI,2008] 52
INTRODUÇÃO
O crescente desenvolvimento e aumento da produção de automóveis no Brasil e
especificamente no pólo automotivo de Curitiba e região metropolitana requer formação
de mão de obra qualificada e desenvolvimento técnico pela engenharia automobilística
para atender a demanda exigida por toda essa cadeia industrial. Atualmente existem
cinco cursos de graduação em Engenharia Mecânica em Curitiba que formam
engenheiros para as empresas envolvidas direta e indiretamente na produção dos
veículos nessa região e não existe um curso específico de engenheiro automotivo. Esses
cursos de graduação são ministrados pela Universidade Tuiuti do Paraná, Universidade

Positivo, Universidade Federal do Paraná, Universidade Tecnológica Federal do Paraná
(UTFPR) e Pontifícia Universidade Católica do Paraná (PUC).
A UTFPR participa em duas competições nacionais de projetos e construção de veículos
que são a Fórmula SAE e BAJA. A Fórmula SAE consiste em uma competição na qual
alunos universitários desenvolvem um pequeno protótipo automotor. O veículo é
projetado, construído e testado de acordo com regras cujo propósito é a manutenção da
integridade tanto do piloto, do veículo e também garantir a sua viabilidade de uso. O
BAJA é outro projeto da UTFPR em que se projeta um veículo automotor para rodar em
terrenos de chão batido mais conhecidos como off-roads. São projetos movidos pelo
interesse dos próprios alunos cabendo aos estudantes a modelagem via protótipo,
escolher os processos de fabricação envolvidos e os desempenhos dos motores. O BAJA
é o mais antigo destes projetos mostrando o interesse dos estudantes em pesquisas no
segmento automotivo. Como estas duas competições divulgam o nome da instituição
para todo o país e representam o trabalho de professores e alunos da UTFPR, é
fundamental se obter um bom desempenho .
O projeto automobilístico está cada vez mais avançado, com novas técnicas de produção
e de desenvolvimento de produtos, produzindo cada vez mais veículos com um melhor
desempenho, eficiência, segurança e questões relacionadas ao meio ambiente.
Contexto
Segundo [NICOLAZZI, 2008], historicamente o uso da roda para transporte de cargas
começou por volta do ano 4000 antes de Cristo, concomitamente ao emprego da roda
era preciso buscar dispositivos que controlassem o movimento das cargas sobre as rodas
e as fizessem parar na hora e local desejado, assim apareceram os primeiros freios.
Somente no ano de 1923 a indústria automotiva passou a utilizar freios nas quatro rodas
e devido à dificuldade de equalizar a frenagem nos eixos dianteiros e traseiros dos
veículos dotados com freios de acionamento mecânico, desenvolveram-se os sistemas
de acionamento hidráulicos e pneumáticos, até hoje utilizados nos veículos comerciais.
De acordo com os dados divulgados pelo jornal Folha de São Paulo atualmente a
produção de veículos no Brasil está se consolidando entre as cinco maiores do mundo.
Desta forma todo o pólo automobilístico instalado e sua cadeia produtiva necessitam de
profissionais qualificados para garantir a competitividade dessa indústria nacional.
Nesse contexto, com o objetivo de evitar acidentes automobilísticos e salvar vidas o
CONTRAN (Conselho Nacional de Trânsito) sancionou projetos de lei a fim de
implementar novas tecnologias de segurança nos veículos produzidos no Brasil, assim
gradativamente até o ano de 2014 serão obrigatórios os equipamentos AIRBAG (Bolsas
Infláveis) e ABS (Anti-lock Braking System) instalados em todos os carros novos
produzidos.
.
Problema
Contrastando com um panorama de pólo automobilístico na região da grande Curitiba e
com excelência da formação de Engenharia Mecânica não se encontra na ementa
curricular desses cursos de graduação um conhecimento específico sobre engenharia
automobilística.
Ao chegarem ao mercado de trabalho os estudantes podem sentir uma lacuna de
conhecimento na área automotiva. Com isso os projetos de Fórmula SAE e BAJA da
UTFPR podem ser beneficiados pela metodologia de dimensionamento de freios
utilizando o programa de computador gerado capaz de dimensionar os seus
componentes de freios.
Objetivos

Os objetivos deste trabalho são:
* Aplicar e apresentar uma metodologia de dimensionamento de freios a disco para
veículos e protótipos.
* Gerar um programa computacional para cálculos e dimensionamento de freios a
disco.
Justificativa
Para preencher a ausência de conhecimento específico sobre o tema dimensionamento
de freios a disco para veículos na instituição, no curso de graduação em Engenharia
Mecânica e apoiar os futuros projetos de competições como o BAJA e o Fórmula SAE
foi apresentada uma metodologia de dimensionamento de freios a disco e gerado um
software baseado nela. Com isso também foi trazido e deixado conhecimento corrente
sobre o tema para o curso de Engenharia Mecânica da UTFPR.
O tema proposto é relacionado a várias disciplinas obrigatórias do curso de Engenharia
Industrial Mecânica em especial a de elementos de máquinas. A motivação particular
dos alunos é devida ao mercado de trabalho.
Conteúdo do trabalho
No capítulo 2 é detalhada a metodologia utilizada para a geração do software e os seus
limitantes.
No capítulo 3 está apresentada toda a fundamentação teórica do assunto.
No capítulo 4 é exemplificado um dimensionamento de freios a disco utilizando o
programa de computador gerado neste projeto,bem como as restrições do programa, e
sugestões para futuros projetos.
No capítulo 5 é feito uma conclusão geral de todo o trabalho.
METODOLOGIA
Descrição da metodologia
Para este projeto a equipe realizou a seguinte metodologia:
* Realizou-se uma análise da bibliografia existente a respeito de freios a disco
automotivo e o seu dimensionamento. Foi utilizado como referência o método de
dimensionamento de freios proposto por [NICOLAZZI, 2008] e [LAWRENCE,1997],
manuais de fabricantes de freios, publicações independentes como revistas
especializadas em veículos automotores, livros sugeridos pela banca de avaliação e
materiais complementares.
* Realizou-se uma consulta com estudantes que estão envolvidos com competições
como o BAJA e a Fórmula SAE, tanto da UFPR quanto da UTFPR. Assim
caracterizado o levantamento da necessidade dos projetistas.
* Selecionou-se um critério de cálculo que melhor se adaptava as necessidades
apresentadas pelos projetos do BAJA e Fórmula SAE e que também garanta resultados
mais precisos no dimensionamento.
* Realizou-se um dimensionamento para testar a validade dos cálculos que foram pré-
determinados no critério de cálculo adotado, e assim puderam ser aplicados no software
de dimensionamento de disco.
* Gerou-se um algoritmo para realizar o dimensionamento utilizando dados de entrada
tanto do veículo quanto dos elementos que estão presentes no sistema de frenagem,
utilizando os dados de saída que atendem satisfatoriamente os projetistas e que tem uma
fundamentação teórica bem embasada.
* Foi gerado um software em linguagem “C++” utilizando como base o algoritmo.
Justificativa da metodologia

Para apresentar uma metodologia de dimensionamento de freios a disco que garantisse
resultados reais e coerentes foi realizada uma revisão bibliográfica em diversas fontes e
comparado o resultado encontrado com o existente em carros fabricados. Com a
metodologia definida foi gerado um algoritmo em linguagem computacional “C++”
para dimensionamento de freios a disco levando em consideração todos os parâmetros
mínimos de entrada necessários para os cálculos e todos os resultados de saída do
programa. Foram estabelecidos alguns critérios específicos de dimensionamento para o
BAJA porque o mesmo possui características distintas em relação aos carros de passeio
como, por exemplo, a relação do tamanho do pedal e a força aplicada pelo usuário.
Produtos do projeto
Foi realizada uma monografia embasada nas informações obtidas mediante a pesquisa e
desenvolvimento. Também foi gerado um programa computacional para o
dimensionamento de freios a disco automotivo, o programa além de devolver uma
resposta satisfatória atendendo aos requisitos solicitados, gera um relatório no bloco de
notas com os cálculos que são realizados de acordo com o algoritmo de programação.
Etapas do projeto
As etapas que foram seguidas juntamente com os produtos que os procedem estão de
acordo com a seqüência abaixo.
1ª Revisão Bibliográfica:
Pesquisa de materiais e artigos referentes ao tema, uma revisão bibliográfica da
metodologia de dimensionamento de freios de NICOLAZZI (2008) e de LAWRENCE
(1997), e assim servindo para a composição de um tutorial que configurou o subproduto
desta primeira etapa.
2ª Especificações do dimensionamento:
Devido a falta de espaço observada na figura 2.1 para um servo-freio, que deveria se
localizar antes do êmbolo do cilindro-mestre (também chamado de “burrinho”). O
servo-freio tem por função aliviar o esforço do motorista aplicado no pedal e com isso o
dimensionamento do disco em função da força no pedal se tornou uma necessidade
imprescindível para o projeto do BAJA.
Figura [ 2 ].1 Cilindro-mestre do BAJA 2010 UTFPR
É relevante informar ao projetista que ao utilizar o software desenvolvido pela equipe é
necessário limitar o tamanho do pedal para não ultrapassar os limites físicos do BAJA.
Na figura 2.2 é possível observar a limitação de espaço que o pedal de freio tem em um
protótipo do BAJA, também deve ser levado em consideração que este mesmo espaço
deve também acomodar o piloto.
Figura [ 2 ].2 - Pedal do BAJA 2010 UTFPR
Durante o levantamento de dados de todos os elementos mecânicos que compõem o
sistema de frenagem, em especial do BAJA, foi observado que as pinças de freio,
cilindro-mestre, pastilhas e pneus são comprados diretamente com os fabricantes e

nenhum destes elementos mencionados é fabricado pelos estudantes que fazem parte
desta competição. Por outro lado o pedal e os discos de freio são dimensionados pela
própria equipe de projetista, portanto são estes elementos que poderão ser manipulados
de forma a atender os requisitos básicos de desempenho da frenagem.
Outro aspecto limitador utilizado pela equipe foi o diâmetro do disco de freio
dimensionado que não deve ultrapassar um valor próximo ao diâmetro interno das rodas
como mostra em um BAJA como mostra a figura 2.3.
Figura [ 2 ].3 - Disco de freio do BAJA 2010 UTFPR.
3ª Programação:
Foi realizado um fluxograma de forma simples contendo todas as variáveis de entrada
necessárias levantadas anteriormente através da pesquisa bibliográfica a qual serviu de
base para o desenvolvimento do software. Estas variáveis foram a força do pé sobre o
pedal que deve ser compatível valores de conforto retirados da literatura, o tamanho de
pedal que também deve ser coerente com o espaço que este elemento mecânico dividirá
com o piloto, e o tamanho do disco que deve ser compatível com o diâmetro interno da
roda. As forças de arrasto aerodinâmico e resistência ao aclive são desprezíveis, pois
tanto o BAJA quanto a formula SAE desenvolvem velocidades muito baixas e assim sua
influência pode ser desconsiderada.
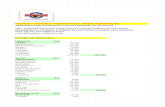
Cronograma
O cronograma do projeto final pode ser visualizado através do Quadro 2.1 mostrado
abaixo. Este cronograma sofreu adaptações no decorrer do tempo de acordo com prazos
estipulados pela coordenação da disciplina ou acerto com o professor orientador.
Quadro 2.1 – Exemplo de Cronograma do Projeto
| Quinzena |
Atividades | J1 | J2 | F1 | F2 | M1 | M2 | A1 | A2 | M1 | M2 | J1 | J2 | J1 | J2 | A1 | A2 | S1
| S2 | O1 | O2 | N1 | N2 | D1 | D2 |
Definição do tema e orientador | | | | x | x | | | | | | | | | | | | | | | | | | | |
Entrega da proposta | | | | | | x | | | | | | | | | | | | | | | | | | |
Defesa da proposta | | | | | | | x | | | | | | | | | | | | | | | | | |
Entrega de aprovação da proposta | | | | | | | x | | | | | | | | | | | | | | | | | |
Pesquisa Bibliográfica | | | | | | | x | x | X | x | x | x | | | | | | | | | | | | |
Atividade aulas de computação | | | | | | | | x | X | x | x | x | | | | | | | | | | | | |
Entrega da monografia parcial | | | | | | | | | | | | x | | | | | | | | | | | | |
Defesa da monografila parcial | | | | | | | | | | | | x | x | | | | | | | | | | | |
Entrega da versão final da monografia parcial e cronograma atualizado | | | | | | | | | | | | | | |
x | | | | | | | | | |
Programação do dimensionamento | | | | | | | | | | | | | | | x | x | x | | | | | | | |
Acompanhamento do projeto,reuniões com Professor Orientador | | | | | | | | | | | | | | | x | x |
x | x | x | x | | | | |
Avaliação do programa e artigo | | | | | | | | | | | | | | | | | | | x | x | | | | |
Entrega da monografia | | | | | | | | | | | | | | | | | | | | | x | | | |
Ajustes finais de programa e artigo | | | | | | | | | | | | | | | | | | | | x | x | | | |
Defesa da monografia | | | | | | | | | | | | | | | | | | | | | | | x | |
Entrega da versão final da monografia | | | | | | | | | | | | | | | | | | | | | | | x | |
fundamentação teórica
Frenagem

Ao se estudar um sistema de frenagem se faz necessário diferenciar a frenagem de um
veículo automotor e a frenagem de uma máquina rotativa. Esta diferença está no fato de
que o sistema de frenagem automobilístico apresenta uma cinemática mais complexa,
pois o movimento total é decomposto em uma parcela rotacional e em outra parcela
referente ao movimento de translação do próprio veículo. No sistema de frenagem
industrial o sistema se encontra em repouso diferentemente do sistema de frenagem
automotivo que encontra em movimento.
Desta forma, frear um automóvel por meio de um freio a disco significa diminuir a
velocidade de translação do veículo enquanto frear uma máquina significa diminuir a
rotação do seu eixo motor.
Portanto, dentro desta condição, o processo de frenagem de um veículo é muito mais
complexo do que uma máquina, envolvendo diversos fatores tais como a resistência ao
rolamento, resistência aerodinâmica e resistência ao aclive.
Os freios automobilísticos diferem também pela forma que são acionados, enquanto que
nos sistemas de freios industriais o usuário é visto como um controlador à parte e
externo ao sistema, no freio automobilístico o usuário é parte integrante do próprio
sistema sendo ele sujeito aos esforços de frenagem, e também os elementos que fazem
parte do sistema de frenagem. Assim todos estão sujeitos a frenagem causada pela força
de atrito do par pneu/solo que está fora desse sistema e com isso atuando contra o
movimento de translação do automóvel.
Observam-se na figura 3.1 as componentes das velocidades no ponto de contato entre o
pneu e o solo:
Figura [ 3 ].1 Diagrama de corpo livre do pneu em contato com a pista
Ao acionar o sistema hidráulico mediante ao esforço aplicado no pedal, a porção de
fluido hidráulico presente no cilindro-mestre transforma a força aplicada sobre ela em
pressão Esta pressão por sua vez será transmitida no fluido e reconvertida em força no
contato pinça/fluido, conseqüentemente as pastilhas de freio atreladas a pinça serão
deslocadas e friccionadas contra o disco. O atrito do par pastilha/disco de freio
diminuirá a rotação do disco de freio que será transmitido para o pneu, que em contato
com a pista freará o veículo. A total imobilização do veículo ocorre juntamente com a
redução de rotação do disco de freio, para o caso ideal de frenagem.
Em uma situação de frenagem diferente do caso ideal ocorre o travamento das rodas e
com isso a velocidade referente à rotação é suprimida, enquanto que a componente de
velocidade referente a translação ainda existe.
A falta de controle sentida pelo motorista está ligada justamente pela diferença entre o
tempo de queda de velocidade de rotação dos discos acionados pelo sistema hidráulico e
o tempo de queda de velocidade de translação do veículo atrelada aos fatores externos
(atrito do par pneu/solo). A fim de contornar esta situação indesejável, a força de
frenagem (força de atrito presente no par pista/pneu) que se opõe ao movimento de
translação do veículo deve ser compatível com o torque produzido pela força de atrito
do par disco/pastilha, pois desta forma a medida que o automóvel perde velocidade
translacional o disco perde velocidade angular.
Portanto os esforços que o disco de freio estará sendo submetido dependem, mesmo que
indiretamente, dos parâmetros externos, que são os fatores preponderantes do
dimensionamento do disco automotivo. Forças de resistência ao rolamento, ao
movimento em aclive e resistência ao arrasto aerodinâmico influenciam no valor da
força de frenagem, que influencia diretamente no torque do disco para o caso ideal, ao
contrario dos discos industriais que são justamente os fatores internos e diretos aos

elementos rotativos. (coeficiente de atrito par pastilha/disco) que irão determinar os seus
parâmetros de dimensionamento.
Existem dois tipos mais comuns de freios utilizados nos veículos, além do freio a disco
que já foi abordado seu princípio de funcionamento existe o freio a tambor que apesar
de possuir maior número de peças e ser menos eficiente possui um custo de produção
mais baixo. Além disso, ao seu sistema pode ser incorporado um mecanismo de freio de
estacionamento. Por isso no Brasil a grande maioria dos veículos fabricados utiliza
freios a disco nas rodas dianteiras e freios a tambor nas rodas traseiras. Veículos mais
esportivos e/ou sofisticados utilizam freios a disco nas quatro rodas para assim
aumentar a eficiência da frenagem. O freio a tambor é constituído de duas sapatas que
são empurradas pelos pistões contra o tambor, com isso as lonas existentes entre as
sapatas atritam com o tambor e diminuem a rotação da roda.
A figura 3.2 mostra um típico freio a tambor.
Figura [ 3 ].2 Sistema de freio a tambor [BOSCH, 2010]
Sistemas de frenagem automotiva
O acionamento do sistema de frenagem nos automóveis é feito mediante a força
hidráulica que tem por responsabilidade amplificar a força que o motorista aplica no
pedal, e transformando-a em esforço de fricção no contato pastilha disco, que irá atuar
tanto nos discos dianteiros quanto nos tambores traseiros, vale a pena frisar que neste
trabalho o limite de força aplicado pelo motorista será de 100 lbf (aproximadamente
444,82 N) [LAWRENCE,1997].
O motorista através do deslocamento do pedal aciona o êmbolo do cilindro-mestre
forçando o escoamento do fluído de frenagem pela tubulação. Logo em seguida os
fluídos acionam os êmbolos das pinças, que estão acoplados as pastilhas, as quais irão
atuar contra os discos. A frenagem ocorre mediante a atuação da força de atrito causada
pela interação do material do disco com a pastilha.
A figura 3.3 representa o mecanismo de acionamento do sistema de frenagem em um
automóvel de forma simplificada. Onde se observa o esforço que o motorista aplica
sobre o pedal, tendo como resultado o deslocamento do fluido de freio presente no
cilindro-mestre dentro do tubo hidráulico, para próximo do disco, mais
especificadamente dentro da própria pinça, de modo a preencher o cilindro interno
vazado deste elemento mecânico.
Figura [ 3 ].3 Visão geral do sistema de frenagem [LAWRENCE,1997]
Os elementos que fazem parte do sistema de frenagem são:
* Pedal de freio: Transmite a força aplicada pelo pé do motorista ao sistema hidráulico
de frenagem como mostra a figura 3.4.
Figura [ 3 ].4 Pedal de freio
* Cilindro-mestre e reservatório de fluído: O reservatório é o item que armazena o
fluído de freio e é acoplado ao cilindro-mestre com finalidade de abastecer o sistema de
frenagem hidráulico do veículo. O cilindro mestre se localiza a frente do motorista junto

ao motor podendo ser composto por uma ou duas câmaras separadas, denominado
simples e duplo respectivamente para os dois casos mencionados. O fluído de freio para
o caso do cilindro-mestre simples irá alimentar simultaneamente o sistema de frenagem
nas quatro rodas, enquanto que no cilindro-mestre duplo cada câmara será responsável
por duas rodas presente nos eixos dianteiros e traseiros. A figura 3.5 mostra um
cilindro-mestre típico de um carro de passeio.
Figura [ 3 ].5 Cilindro-mestre [BOSCH, 2010]
* Tubulação (tubo hidráulico): Uma parte da tubulação é constituída de mangueira de
borracha nas partes flexíveis perto das rodas e outra parte da tubulação é constituída de
aço. A função da tubulação é o transporte do fluído de freio do reservatório até as pinças
de freio [BOSCH, 2010].
* Pinça. É o local onde irá ocorrer a transformação de pressão de fluído parcialmente
incompressível em força de contato promovendo o deslocamento do êmbolo na qual
estão acopladas as pastilhas que irão atuar contra o disco de freio. A figura 3.6 mostra
um conjunto com pinça e disco de freio:
Figura [ 3 ].6 Pinça e disco de freio [BOSCH, 2010]
* Disco. É o elemento mecânico conectado a roda responsável pela frenagem do
veículo. A frenagem ocorre pela interação entre o material do disco e as pastilhas de
freios. O disco também é o elemento mecânico responsável pela dissipação de calor
ocasionado durante a frenagem. Na figura 3.7 é exemplificado um disco de freio
comum:
Figura [ 3 ].7 Disco de freio [BOSCH, 2010]
* Pastilhas de freio: Elementos mecânicos que atuam aos pares sobre cada disco (face
esqueda e face direita) . As pastilhas de freio juntamente com o disco são os elementos
responsáveis pela transmissão de força de frenagem para o pneu através da força de
atrito que atua entre a interface pastilha-disco. A pressão do fluído de freio atua sobre as
pastilhas que por sua vez fricciona contra o disco causando a frenagem. A figura 3.8
apresenta um exemplo de pastilhas de freio.
Figura [ 3 ].8 Pastilhas de freio [BOSCH, 2010]
Análise do Acionamento do Sistema Hidráulico
O sistema de frenagem é acionado mediante estímulo do motorista pela aplicação de
força sobre o pedal que se deslocará como conseqüência. O balanço de forças será feito,
tendo em vista o equilíbrio dos momentos, o braço de momento são medido em relação
à extremidade inferior do pedal nas quais as cotas estão referenciadas. A figura 3.9
apresenta o diagrama de corpo livre do pedal.
Figura [ 3 ].9 Diagrama de corpo livre do pedal
Sendo:

Fpé - Força do pé sobre o pedal.
Fem - Força do pedal sobre o embolo do cilindro mestre.
δxpé - Deslocamento do pedal.
δxem - Deslocamento do êmbolo no cilindro mestre.
Lp - Distância entre o ponto de articulação e o ponto de aplicação da força do pé.
Le - Distância entre o ponto de articulação e a força de aplicaçao no êmbolo do
cilindro.
Existe uma relação direta entre as forças e as distâncias tendo em vista o equilíbrio dos
momentos, portanto tem-se:
Fem=GmFpé Eq. 3.1
Sendo:
Gm=LpLe Eq. 3.2
Gm - Razão de proporção do pedal.
Na figura 3.10 pode-se observar a razão de proporção de um pedal de freio em um
protótipo do BAJA.
Figura [ 3 ].10 Razão de proporção do pedal de freio do BAJA UTFPR 2010
A mesma razão de proporção do pedal utilizado para o ganho de força é válido para o
deslocamento do pé a fim de obter o deslocamento de êmbolo.
Portanto:
δxem=δxpéGm Eq. 3.3
A força máxima aplicada pelo pé do motorista sobre o pedal será de 100 lbf,
aproximadamente 444,82N. O dimensionamento do disco será feito em função desta
informação.
O deslocamento do êmbolo do cilindro mestre, popularmente também chamado de
burrinho, atua sobre o fluído, portanto o sinal de entrada é o deslocamento do pé do
motorista e o sinal de saída para este estágio do sistema de frenagem é o deslocamento
do fluído presente na câmara do cilindro mestre.
A figura 3.11 apresenta o diagrama de corpo livre de um cilindro mestre.
Figura [ 3 ].11 Diagrama de corpo livre no interior do sistema formado pelo cilindro
mestre
As porções de fluído presente nas câmaras tanto do cilindro-mestre quanto a do pistão
da pinça estarão submetidas a uma mesma pressão conforme a equação 3.4:
δP=FemAem Eq. 3.4
Sendo:
Aem - Área da câmara do cilindro mestre.
δP - Diferencial de pressão aplicado no fluído do êmbolo.
Fem - Força sobre o êmbolo da câmara do cilindro mestre.
Ganho de força por via hidráulica.
A princípio a força será aplicada sobre o fluído pelo comando do motorista, gerando
pressão sobre o fluído. Posteriormente a pressão, será transmitida no fluído, até a pinça.
Na pinça se localiza as pastilhas de freio. Nas regiões onde o fluído tem contato com

algum elemento mecânico surge uma força sobre este mesmo elemento. Estas forças
serão uma função das áreas onde o fluído atuará (nas áreas da base dos cilindros
internos das pinças) e será atuado (na câmara do cilindro mestre).
A equação 3.5 mostra a força promovida, pelo fluído dentro do cilindro do pistão,
sobre o elemento mecânico que a pastilha esta acoplada:
Fd=δP.2.Acd Eq. 3.5a
Ft=δP.2.Act Eq. 3.5b
Sendo:
Acd - Área do pistão da pinça para disco dianteiro.
Act - Área do pistão da pinça para disco traseiro.
Fd - Força do fluído sobre as duas pinças no contato fluído/pinça, para eixo dianteiro.
Ft - Força do fluído sobre as duas pinças no contato fluído/pinça, para eixo traseiro.
A figura 3.12, mostra um diagrama em corte do interior da pinça, na qual se observa que
à medida que o cilindro interno é preenchido por fluido de freio o pistão a qual em sua
extremidade a pastilha de disco está acoplada também se desloca de modo a friccionar a
pastilha contra o disco.
Diâmetro do pistão da pinça
Figura [ 3 ].12 Corte transversal do sistema de frenagem a disco.
O ganho de forças por via hidráulica será definido como:
Gpd=2AcdAem Eq. 3.6a
Gpt=2ActAem Eq. 3.6b
Sendo:
Gpd- Ganho de força por via hidráulica para eixo dianteiro.
Gpt - Ganho de força por via hidráulica para eixo traseiro.
Interface pastilha/disco.
O valor do torque no disco é igual a força de atrito (força normal multiplicado pelo
coeficiente de atrito da iteração pastilha-disco) multiplicado pelo braço de alavanca (no
caso metade do diâmetro menos a distância entre o próprio raio e o ponto de aplicação
da força). Para discos nas rodas dianteiras e traseiras:
Td=2Acdµ(Ddd2-dod) δP Eq. 3.7a
Tt=2Actµ(Ddt2-dot) δP Eq. 3.7b
Sendo:
Ddd - Diâmetro do disco dianteiro.
Ddt - Diâmetro do disco traseiro.
dod - Distância entre o contorno da periferia externa do disco e o ponto de aplicação da
força normal devido à pressão (disco dianteiro).
dot - Distância entre o raio do disco e o ponto de aplicação da força normal devido à
pressão (disco traseiro).
Td - Torque no disco dianteiro.
Tt - Torque no disco traseiro.
µ - Coeficiente de atrito da pastilha de freio sobre o disco.
Acd - Área do pistão da pinça para disco dianteiro.
Act - Área do pistão da pinça para disco traseiro.
A figura 3.13 mostra um ponto hipotético de aplicação da força normal no disco pela
pastilha durante a frenagem, a fim de mostrar que o ponto de aplicação da força não será

no perímetro externo do disco.
Figura [ 3 ].13 Ponto de aplicação da força normal sobre o disco
No presente trabalho, para futuros dimensionamentos, serão utilizados os valores de
coeficiente de atrito do par pastilha / disco de acordo com o gráfico 3.1.
Gráfico 3. [ 1 ] Curva que representa o coeficiente de atrito do par pastilha disco de
freio x velocidade do veículo [bosch, 2010]
Interface pneu / solo.
Os torques gerados pela força de atrito no par pastilha/disco serão transferidos para os
pneus que por sua vez atuarão no contato dos próprios pneus com a pista:
Tem-se:
Fd=TdDpneud/2 Eq. 3.8a
Ft=TtDpneut/2 Eq. 3.8b
Sendo:
Fd - Força sobre o pneu dianteiro.
Dpneud - Diâmetro do pneu dianteiro.
Ft - Força sobre o pneu traseiro.
Dpneut - Diâmetro do pneu traseiro.
O presente trabalho utiliza o raio dinâmico de pneu, devido a deformação do pneu em
contato com a pista de acordo com a figura 3.14, para o cálculo do torque, através das
equações:
re=0,47.D Eq. 3.9
rd=1,02.re Eq. 3.10
Sendo:
re - Raio estático.
D- Diâmetro externo do pneu.
rd - Raio dinâmico.
O raio dinâmico será devidamente substituído nas variáveis: (Dpneut/2 e Dpneud/2)
para futuros dimensionamentos.
Figura [ 3 ].14 Deformação do pneu durante contato com o solo
Reta real da distribuição das forças de frenagem promovidas pelo sistema hidráulico:
De acordo com a equação 3.8a e 3.8b, e fazendo as devidas substituições nos torques de
acordo com a equação 3.7a 3.7b tem-se:
Fd=TdDpneud/2=2Acdµ(Ddd2-dod) δPDpneud/2 Eq.
3.11a
Ft=TtDpneut/2=2Actµ(Ddt2-dod) δPDpneud/2 Eq.
3.11b
Admitindo o diâmetro do pneu traseiro igual ao dianteiro, e que a pressão transmitida do
cilindro mestre para as pinças dianteira e traseira sejam iguais, dividindo as equações
3.11b e 3.11a entre si tem-se:
FtFd=TtTd=Acdµ(Ddt2-dod)Actµ(Ddd2-dod)=J Eq.
3.12

Ft=J. Fd Eq. 3.13
J – Coeficiente angular
Apesar da força que causa a redução de velocidade tangencial do pneu, ser distinta da
força de atrito presente na interface solo pneu, ambas são denominadas de força de
frenagem, pois atuam contra as velocidades do diagrama de velocidades apresentadas
pela figura 3.1.
A força de frenagem promovido pelo sistema hidráulico atua sobre a velocidade
tangencial do pneu, devido a redução da velocidade angular do disco,e a força de
frenagem devido ao atrito do par solo/pneu irá reduzir a zero a velocidade de translação
do veículo.
A reta de distribuição de forças de frenagem segundo a equação 3.13, evidencia a
relação de forças do eixo traseiro em função do eixo dianteiro onde o coeficiente
angular da reta é determinado pelos valores das dimensões dos elementos mecânicos
que fazem parte do sistema de frenagem.
Pode-se alterar o coeficiente angular da reta da equação 3.13, mudando a regulagem da
área do pistão da pinça, tanto quanto alterando o raio do disco.
O gráfico 3.2 mostra o comportamento das forças de frenagem ao longo dos dois eixos,
promovido pelo sistema hidráulico além de evidenciar os efeitos do dimensionamento
dos elementos mecânicos sobre a inclinação da reta.
Aumentando o raio do disco traseiro, para um mesmo conjunto de pinça tanto para eixo
traseiro e dianteiro, aumenta-se o coeficiente angular da reta.
Maior área do pistão da pinça traseiro e/ou raio do disco traseiro
Menor área do pistão da pinça traseiro e/ou raio do disco traseiro
Gráfico 3. [ 2 ] Distribuição das forças sobre os pneus dianteiros e traseiros
Mecânica da frenagem
Força de frenagem, contrário ao movimento de translação do veículo.
A força de atrito do par pneu/pista atua contra a velocidade de translação presente na
roda, ver figura 3.1.
Existem outras forças que atuam contra o movimento de veículo, portanto favoráveis a
frenagem do automóvel, estas forças são: arrasto aerodinâmico e resistência ao
rolamento.
Porém é a força de atrito que irá de fato parar o veículo devido a sua própria natureza de
se opor ao movimento de translação.
Como a força de frenagem é dependente do coeficiente de atrito, o item 3.4.1.1 irá
analisar as variáveis que influenciam no coeficiente de atrito.
Variáveis que influenciam o coeficiente de atrito solo/pista.
As variáveis que influenciam o coeficiente de atrito são basicamente duas: o índice de
escorregamento entre a superfície do pneu com a pista de rolagem e a natureza do
contato pneu/pista de rolagem.
O coeficiente de atrito presente entre o solo e o pneu, também é influenciado pelo
estado na qual se encontra a pista de rolagem, em especial para pistas molhadas situação
comum em dias de chuva.
A aderência de acordo com GILLESPIE (1992) pode-ser explicada como a interação em
nível microscópios entre o pneu e o solo, na qual o material do pneu irá preencher os
sulcos do solo de tal modo que haverá uma interpenetração entre as duas superfícies.

Observa-se através da figura 3.15 a continuidade de forma em alguns pontos de
contato entre o solo e o pneu:
Figura [ 3 ].15 Relação solo-pneu para condição de adesão de
escorregamento [GILLESPIE, 1992]
A adesão entre as superfícies será maior à medida que a componente de velocidade
relativa à translação do veículo, no ponto de contato no par pneu/solo, se iguale à
componente relativa à velocidade tangencial causada pela rotação do pneu, ver figura
3.1.
Durante o movimento relativo das superfícies do par pneu/solo, surge uma força de
contato oposta ao movimento nos pontos onde ocorre interpenetração das superfícies
(adesão), caracterizada de força de atrito. Portanto quanto maior a deformação do pneu,
de forma a preencher os sulcos presente na pista (mais aderida à superfície) maior a
resistência ao movimento relativo entre elas.
Portanto existe uma relação entre adesão e coeficiente de atrito, pois o coeficiente de
atrito presente na equação 3.14 mede justamente a resistência, na forma de força, ao
movimento relativo entre as superfícies.
Fat=μ.N Eq. 3.14
Sendo:
Fat - Força de atrito.
μ – Coeficiente de atrito entre pneu/solo.
N - Força normal à superfície.
O índice de escorregamento é definido como a relação entre a velocidade relativa do par
pneu/pista, com a velocidade do veiculo. O índice de escorregamento mede justamente a
liberdade de movimento relativo de uma superfície em relação à outra no ponto de
contato.
e=V-rωV Eq. 3.15
Sendo:
V – Velocidade tangencial do pneu.
r – Raio do pneu.
ω - Velocidade angular do pneu.
e – Índice de escorregamento.
Casos particulares de escorregamento:
e = 1 Escorregamento máximo (100% de travamento de rodas).
e = 0 Aderência,não ocorre escorregamento (valor teórico).
e < 0 Ocorre patinação,não existe velocidade de translação.
Conforme mostra o gráfico 3.3 obtido a partir de dados experimentais, observa-se a
variação do coeficiente de atrito em função do escorregamento entre as superfícies de
contato no par pneu/pista.
Embora seja esperado, conforme a teoria, que no escorregamento nulo, ocorra aderência
e conseqüentemente maior coeficiente de atrito no par pneu/pista. Observa-se por
motivos que fogem o escopo do presente trabalho que o maior valor de coeficiente de
atrito, ocorre em uma situação de escorregamento, mesmo que pequeno. O ponto onde

ocorre o maior valor de coeficiente de atrito será o ponto de aderência, pois os valores
experimentais são preponderantes sobre os valores teóricos.
Os coeficientes de atrito acompanhados com subscrito (μa e μe) são utilizados para
identificar os coeficientes em casos particulares de escorregamento, que são: a aderência
e escorregamento máximo.
Gráfico 3. [ 3 ] do coeficiente de atrito com o escorregamento [NICOLAZZI,2008]
O coeficiente de atrito pode não estar somente relacionado com aspectos de
continuidades geométricas entre as superfícies de contato, mas também com a natureza
que constituem estas superfícies. O gráfico 3.4 relaciona o coeficiente de atrito entre o
pneu em função do escorregamento contra variados tipos pistas de rolagem:
Gráfico 3.4 Coeficiente de aderência para pneus em alguns tipos de pistas em variadas
condições [NICOLAZZI,2008]
Em alternativa ao gráfico 3.4, para dados mais precisos dos coeficientes de atrito para
uma situação de aderência, e conseqüentemente os utilizar para dimensionamento dos
freios foi proposto a tabela 3.1:
Tabela 3.1 Coeficiente de atrito para automóveis em vários tipos de
pista [NICOLAZZI, 2008]
Outro aspecto a ser estudado com relação ao coeficiente de atrito é a sua dependência
com superfícies molhadas, inevitável em situação de chuva.
Sobre estas condições observa-se a situação de aquaplanagem que é definido como
situação de deslizamento que ocorre quando o coeficiente de atrito cai a um valor de 0,1
devido à formação de um filme de água que isola a superfície de contato do pneu com o
solo.
A aquaplanagem é uma situação especial que ocorre necessariamente em altas
velocidades, dependendo do estado que se encontram os pneus do veículo
Pneus com sulcos drenam de forma eficiente a película de água, evitando a situação de
aquaplanagem, pois o fluído líquido concentra-se nos próprios sulcos.
A figura 3.16 mostra a queda do coeficiente de atrito em uma superfície molhada para
pneus com sulcos e pneus carecas em função da velocidade do veículo. No caso de
pneus com sulcos observa-se uma faixa de valores para coeficientes de atrito, que
depende da qualidade do pneu.
Na figura 3.16 as ilustrações embaixo do gráfico representam o grau de penetração do
filme de água em pneus carecas em função da velocidade
Figura [ 3 ].16 Comportamento de um pneu sem perfil, em diferentes velocidades, em
uma pista com lâmina de água [NICOLAZZI, 2008]
A tabela 3.2 representa os valores dos coeficientes de atrito para diversos tipos de piso
sob diversas condições:
Tabela 3.2 Coeficiente de atrito para pistas em diversos estados [NICOLAZZI, 2008].
Resistência Aerodinâmica
As forças de resistência aerodinâmica são a de sustentação, que influi diretamente na

força normal aliviando as reações de apoio, nos pontos de contato pneu/solo e a força de
arrasto aerodinâmico que se opõe ao movimento de translação do veículo.
As reações de apoio do contato pneu/pista de rolagem são numericamente iguais ao
peso do veículo sobre a pista menos o levantamento aerodinâmico devido a interação
entre o veículo em movimento, e o ar. Conseqüentemente a força de sustentação atua
indiretamente na força de atrito, dependente da reação de apoio do par pneu/solo. Outra
força de natureza aerodinâmica é a força de arrasto que atua contrária ao movimento,
demandando um percentual a mais da potência do motor a fim de ser vencida.
As forças aerodinâmicas não ocorrem no contato do par pneu / pista, mas sim em ponto
particular do veiculo, levantado mediante analise experimental, e computação gráfica, e
estão presente ao longo de todo o movimento do automóvel.
A figura 3.17 mostra um ponto hipotético CP onde ocorre a atuação das forças de
origem aerodinâmica, bem como a reposição destas mesmas forças no centro de
gravidade CG, demandando o surgimento de um momento equivalente a transposição
das forcas aerodinâmicas.
Figura [ 3 ].17 Diagrama de corpo livre das forças aerodinâmicas em um veículo
Sendo:
h - Altura do centro de gravidade em relação ao solo.
ha - Altura do ponto de aplicação das forças aerodinâmicas, (CP), em relação ao solo.
a1 - Distância entre o centro de gravidade e o eixo dianteiro.
a2 - Distância entre o centro de gravidade e o eixo traseiro.
u1 - Distância entre o CP e o eixo dianteiro.
u2 - Distância entre o CP e o eixo traseiro.
ev - Distância vertical entre o CP e o centro de gravidade.
eh - Distância horizontal entre o CP e o centro de gravidade.
Fz - Força de sustentação.
Ml- Momento causado pela força de sustentação e arrasto no ponto do centro de
gravidade.
O momento causado pelas forças de sustentação e arrasto, devido a distância entre o
CP e o CG, pode ser calculado como:
Ml=Fzeh+Qaev Eq. 3.16
Sendo:
Fz- Força de sustentação aerodinâmica.
Qa- Força de arrasto aerodinâmico.
Ao longo da frenagem, a força de resistência aerodinâmica atua favoravelmente a
frenagem do veículo, traduzindo em menores esforços a ser vencido pelo sistema de
frenagem.
Alguns automóveis utilizam aerofólios reguláveis, que aproveitam a resistência ao
arrasto, para melhorar a eficiência da frenagem.
Resistência ao arrasto
A resistência ao arrasto aerodinâmico, é uma força de contato que atua sobre o veículo
devido a velocidade relativa entre o próprio automóvel e o ar atmosférico.
Atualmente os carros mais modernos possuem um design arrojado com baixo
coeficiente de atrito aerodinâmico onde as forças de arrasto são minimizadas,
significando maior potência do motor atrelada à economia de combustível, porém ainda
o desperdício para vencer a resistência aerodinâmica encontra-se na ordem de 30 % da

potência do motor de acordo com NICOLAZZI (2008).
O cálculo da força aerodinâmica de arrasto depende das condições atmosféricas, dados
como temperatura e pressão serão os fatores que determinarão a massa específica do ar,
ver equação 3.18 que é uma das variáveis que formam a equação da resistência ao
arrasto aerodinâmica. Outras variáveis são: a velocidade relativa do fluído em relação
ao veículo, a área de secção transversal do veículo em relação ao escoamento (projeção
da área perpendicular contraria as de linhas de fluxo), e o coeficiente de arrasto.
O coeficiente de arrasto pode ser definido segundo a equação 3.17:
Qa=1/2ρV2CdA Eq. 3.17
Sendo:
ρ - Massa específica do ar nas condições atmosféricas onde o veículo está submetido.
V - Velocidade relativa entre o veículo e o ar atmosférico.
A - Projeção da área do veículo.
Cd - Coeficiente de arrasto aerodinâmico.
Qa - Força de arrasto aerodinâmico.
Para cálculo da massa específica usa-se:
ρ=0,4647PT Eq.
3.18
Sendo:
P - A pressão atmosférica em mm de Hg.
T - Temperatura absoluta em K.
De acordo com GILLESPIE (1992) obtém-se o coeficiente de arrasto para diversas
geometrias de veículos apresentados na figura 3.18.
Figura [ 3 ].18 Coeficiente de arrasto em função da geometria [GILLESPIE, 1992]
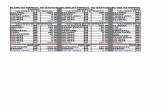
Na tabela 3.3 são apresentados alguns coeficientes de arrasto para diversos carros:
Tabela 3.3 Coeficiente de arrasto para alguns veículos nacionais
Carro | C |
Opel Insígnia | 0,27 |
Audi A3 | 0,32 |
Audi A6 | 0,28 |
Opel Kadett | 0,38 |
BMW Série 1 | 0,31 |
Citröen CX | 0,36 |
Citröen C4 coupe | 0,28 |
Opel Astra | 0,32 |
Peugeot 807 | 0,33 |
Renault Espace | 0,36 |
Renault Espace | 0,35 |
Renault Vel Satis | 0,33 |
Fiat Uno | 0,35 |
Fiat 147 | 0,5 |
VW Golf | 0,31 |

VW Parati | 0,41 |
Força de sustentação aerodinâmica (força de levantamento para veículos)
Assim como no caso de força de arrasto a força de sustentação aerodinâmica depende
das condições do fluído para o qual o veículo esta atravessando.
A força de sustentação aerodinâmica tende a levantar o carro diminuindo a carga
representada pelo peso imposta à pista de rolagem, no contato entre o pneu e o solo, a
força normal sobre o veículo devido o contato com o solo passa a ser igual a força
devido ao próprio peso menos a força de sustentação aerodinâmica, e conseqüentemente
diminuindo a força de atrito, conferindo menor estabilidade ao veículo. A fim de
corrigir o problema deve-se alterar formato do veículo.
Em competições com altas velocidades, os veículos possuem aerofólios nas partes
traseiras, que são elementos mecânicos que devido ao seu formato deslocam a massa de
ar de tal forma que surge uma reação oposta, que empurram o veículo ao solo dando
maior estabilidade e conseqüentemente maior controle de frenagem.
Segue a equação 3.19:
Qz=1/2ρV2ClA Eq. 3.19
Sendo:
ρ - Massa específica do ar nas condições atmosféricas onde o veículo está submetido.
V - Velocidade relativa entre o veículo e o ar atmosférico.
A - Projeção da área.
Cl- Coeficiente de sustentação aerodinâmica.
Qz- Força de sustentação aerodinâmica.
A Figura 3.19 mostra dois valores para os coeficientes de sustentação aerodinâmica em
um mesmo automóvel, na parte dianteira e traseira.
Carros de alta velocidade para fins esportivos possuem alto coeficiente de levantamento
na parte traseira, o que justifica o aerofólio nestas regiões.
Figura [ 3 ].19 Coeficiente de arrasto e sustentação em função da geometria
[GILLESPIE,1992]
Resistência ao Rolamento
A resistência ao rolamento confere a resistência que o par pista/pneu impõe ao
rolamento do pneu.
A figura 3.20 mostra um diagrama de corpo livre das forças de resistência ao rolamento
e onde estas forças são aplicadas:
Figura [ 3 ].20 Diagrama de corpo livre das forças de resistência ao rolamento em um
veículo.
A equação 3.20 para a resistência ao rolamento é definida como:
Qr=fGcosα Eq. 3.20
Sendo:
f - Coeficiente de resistência ao rolamento.
G – Força peso do veículo.

α - Inclinação da pista.
Qr - Força de resistência ao rolamento.
A equação 3.21 mostra o valor do coeficiente de resistência ao rolamento em função da
velocidade em m/s:
f=0,015+0,052(v100)2 Eq. 3.21
As variáveis como pressão de inflagem, velocidade do veículo, além do tipo de piso irão
influenciar no coeficiente de resistência ao rolamento como pode ser observado no
gráfico 3.5.
Gráfico 3. [ 5 ] Variação do coeficiente de atrito de rolamento com a pressão, para um
pneu diagonal [NICOLAZZI, 2008]
A tabela 3.4 mostra a influência do tipo de pista no valor do coeficiente de resistência
ao rolamento:
Tabela 3.4 Coeficientes de atrito de rolamento [NICOLAZZI,2008]
Os efeitos da resistência aerodinâmica ao movimento do veículo são apenas notórios a
partir 50 a 60 milhas por hora, quanto que os efeitos indesejáveis da resistência ao
rolamento se encontram presente durante todo movimento e que grande parte da energia
despendida para vencer tal resistência está sob forma de calor reduzindo
substancialmente a força de abrasão da borracha do pneu sob o solo bem como
causando a fadiga térmica GILLESPIE (1992).
Resistência ao Aclive
A figura 3.21 mostra a distribuição da força peso, sob condição de repouso do veículo,
nos contatos entre o pneu e a pista. Os valores das cargas presentes nos contatos
dependem da distância entre cada eixo e o centro de gravidade. Os valores das cargas
podem ser obtidos através do somatório dos momentos e igualando-os a zero,sendo
aplicados em relação ao ponto de contato pneu pista no eixo dianteiro e posteriormente
no eixo traseiro.
Figura [ 3 ].21 Diagrama de corpo livre das reações de apoio do contato pneu/solo em
um veículo.
Sendo:
a2 - Distância entre o centro de gravidade e o eixo traseiro.
a1 - Distância entre o centro de gravidade e o eixo traseiro.
h - Altura do centro de gravidade em relação ao solo.
l - Distância entre o eixo dianteiro e traseiro.
Gcosα – Componente da força peso perpendicular a pista.
Pd- Carga estática, devido ao peso do veículo em repouso, no contato pneu pista para o
eixo dianteiro.
Pt- Carga estática, devido ao peso do veículo em repouso, no contato pneu pista para o
eixo traseiro
A equação 3.22 é derivada do somatório dos momentos em relação ao eixo dianteiro, e
igualando a zero :
Ptl=a1Gcosα Eq.3.22

A equação 3.23 é derivada do somatório dos momentos em relação ao eixo traseiro, e
igualando a zero:
Pdl=a2Gcosα Eq.3.23
Através da figura 3.21 pode-se observar que:
a1+a2=l Eq.3.24
Normalizando tem-se:
a1+a2l=1
Eq.3.25
Separando as variáveis e renomeando-as tem-se:
a1l=γ Eq.3.26
Logo:
a2=1-γ Eq.3.27
Da figura 3.21, para um ângulo α diferente de zero sobre o veículo surgirá uma força
denominada de resistência ao aclive, que é a força que a própria gravidade gera e atua
sobre o veículo quando este se encontre em um plano inclinado. Deve-se observar que
quando o veículo se movimenta contra a componente de sua força peso em paralelo em
relação ao plano inclinado tem-se um movimento resistente ao aclive. O caso oposto à
própria força peso atua como uma ajudante do movimento. A resistência ao aclive pode
ser expressa como:
Qs=G senα Eq. 3.28
Sendo:
Qs- Resistência ao aclive.
G - Peso do veículo.
α - Ângulo de aclive.
Observa-se através da figura 3.22 o diagrama de corpo livre de um automóvel em um
plano inclinado:
Figura [ 3 ].22 Diagrama de corpo livre de um carro sob uma rampa
[NICOLAZZI,2008]
A figura 3.23 demonstra a definição de aclive que é a elevação da pista por metro de
distância percorrido pelo veículo:
Figura [ 3 ].23 Definição de aclive de 40% (tangente(α)=0,4) [NICOLAZZI,2008]
Curva ideal de distribuição de forcas generalizadas durante a frenagem
Durante a frenagem, as forças de atrito do par pneu/pista também denominadas de
forças de frenagem, devem vencer principalmente a inércia do veículo (velocidade
multiplicado pela massa do veículo no instante de acionamento do sistema de frenagem)
durante o intervalo de tempo que vai desde o acionamento do sistema hidráulico até a
imobilização total do veículo.
Resistência ao rolamento do pneu, resistência aerodinâmica, resistência ao aclive, atuam
contra a inércia do veículo, favorecendo a frenagem do automóvel.
Como as forças de frenagem devem cobrir o movimento do automóvel, representada
pela inércia do veículo, e as forças resistentes a inércia favorece a frenagem, pois atuam
contra o movimento do automóvel. Pode-se deduzir matematicamente que:

Ff=FI-( Qs+ Qr+ Qa) Eq. 3.29
Sendo:
Ff- Força de frenagem.
FI - Força de inércia.
Qs - Resistência ao aclive.
Qa - Resistência aerodinâmica.
Qr - Resistência ao rolamento.
A figura 3.24 mostra o diagrama de corpo livre de um automóvel durante a frenagem:
Figura [ 3 ].24 Diagrama de corpo livre das forças atuantes no veículo [NICOLAZZI,
2008]
Sendo:
a2 - Distância entre o centro de gravidade e o eixo traseiro.
a1 - Distância entre o centro de gravidade e o eixo traseiro.
h - Altura do centro de gravidade em relação ao solo.
l - Distância entre os eixos dianteiro e traseiro.
Gcosα – Componente da força peso perpendicular a pista.
Fz - Força de levantamento aerodinâmico.
FI- Força relacionado a inércia.
Ff- Força de frenagem.
Ff1 - Força de frenagem no eixo dianteiro.
Ff2 - Força de frenagem no eixo traseiro.
Qa - Resistência aerodinâmica.
Qr - Resistência ao rolamento.
Qr1 - Resistência ao rolamento do eixo dianteiro.
Qr2 - Resistência ao rolamento do eixo traseiro.
Qs - Resistência ao aclive.
Ml- Momento causado pela força de sustentação e arrasto no ponto do centro de
gravidade.
A Força de frenagem total é igual a soma das forças de frenagem em cada eixo
(dianteiro e traseiro)
Ff=Ff1+Ff2 Eq. 3.30
A Força de resistência ao rolamento total é igual a soma das forças de resistência ao
rolamento em cada eixo (dianteiro e traseiro)
Qr =Qr1 +Qr2 Eq. 3.31
Da figura 3.24 aplicando o somatório dos momentos em relação ao ponto de contato
entre o pneu traseiro, e igualando a zero, e repetindo o mesmo procedimento para o
contato entre o pneu dianteiro, obtêm-se a reação de apoio de carga dinâmica entre o
pneu e a pista presente ao longo da frenagem,para os dois eixos conforme:
Pd'l=a2Gcosα-Fz-( Qs+ Qa-FI)h-MI Eq. 3.32a
Pt'l=a1Gcosα-Fz+( Qs+ Qa-FI)h+ MI Eq. 3.32b
Sendo:
Pd' - reação de apoio de carga dinâmica entre o pneu e a pista no eixo dianteiro
Pt' - reação de apoio de carga dinâmica entre o pneu e a pista no eixo traseiro.

Admitindo que a força de sustentação bem como o momento devido às forças de
natureza aerodinâmica e a força de arrasto aerodinâmico, sejam desprezíveis, as
equações 3.32a e 3.32b podem ser reescritas como:
Pd'l=a2Gcosα-( Qs+ Qa-FI)h Eq. 3.33a
Pt'l=a1Gcosα+( Qs+ Qa-FI)h Eq. 3.33b
Organizando a equação 3.29 de modo a separar as forças que atuam no pneu das forças
que atuam no centro de gravidade obtêm-se:
( Qs+ Qa-FI)=-( Ff+Qr) Eq. 3.34
Da divisão de cargas estáticas conforme as equações 3.22 e 3.23 e lembrando-se das
relações obtidas através das equações 3.26 e 3.27, fazendo as devidas substituições na
segunda parcela da soma das equações 3.33 a,b conforme a separação de variáveis da
equação 3.34, obtém-se:
Pd' =(1 – γ) Gcosα+( Ff+Qr)X Eq. 3.35a
Pt'= γ Gcosα-( Ff+Qr)X Eq. 3.35b
Sendo:
X - fator de forma.
X=hl Eq. 3.36
Fazendo um comparativo entre a equação 3.35a com a equação 3.23, observa-se um
adicional devido a transferência de carga durante a frenagem, do eixo traseiro para o
eixo dianteiro. Este adicional é então:
ΔG=( Ff+Qr)X Eq. 3.37
A força de frenagem no eixo dianteiro é calculada multiplicando a força normal,
representada pela reação da carga dinâmica do contato pneu / solo sobre a roda
dianteira, pelo coeficiente de atrito do par pneu / solo:
Ff1=µPd' Eq. 3.38
Substituindo a reação de apoio dinâmico sofrido pela roda dianteira conforme a equação
3.35a na equação 3.38 obtém-se:
Ff1=µ[(1-γ) Gcosα+( Ff+Qr)X] Eq. 3.39
Para o cálculo da força de frenagem no eixo traseiro, o procedimento é idêntico ao
aplicado no eixo dianteiro.
Portanto a força de frenagem no eixo traseiro pode ser expressa conforme a equação
3.40:
Ff2=µPt' Eq. 3.40
Substituindo a reação de apoio dinâmico sofrido pela roda traseira conforme a equação
3.35b e na equação 3.40 obtém-se:
Ff2=µ[γ Gcosα-( Ff+Qr)X] Eq. 3.41
Somando-se os efeitos para as quatro rodas, tem-se:
Ff=µ(Pd'+Pt') Eq. 3.42
A força de frenagem total é igual ao peso do próprio veículo multiplicado pelo
coeficiente de atrito do par pneu/pista de rolagem:
Ff=µGcosα Eq. 3.43
A força de frenagem total também pode ser escrita como a soma das forças frenagens
nos eixos dianteiro e traseiro:

Ff=Ff1+Ff2 Eq. 3.44
Portanto relacionando a equação 3.43 com 3.44 a força de frenagem total também pode
ser escrita como:
µGcosα=Ff1+Ff2 Eq. 3.45
Para um determinado coeficiente de atrito e um veículo em particular, isolando a força
de frenagem na traseira evidenciada pela incógnita Ff2 da equação 3.45 obtém-se uma
reta, onde a força de frenagem na traseira será uma função da força de frenagem na
dianteira para um determinado peso de veículo, e um determinado coeficiente de atrito
do par veículo/pista.
As reações de apoio para o eixo dianteiro quanto para o eixo traseiro podem ser obtidas
através das equações 3.35a e 3.35b e fazendo as devidas modificações na segunda
parcela da soma, conforme as equações: Ff=µGcosα e Qr=fGcosα, resultam:
Pd'=Gcosα[1-γ+µ+fhl] Eq. 3.46a
Pt'= Gcosα[γ-µ+fhl] Eq. 3.46b
Multiplicando os valores das reações de apoio das equações 3.46a, 3.46b pelo
coeficiente de atrito do par pneu/pista se deduz as forças de frenagem que irão reduzir a
zero a componente da velocidade de translação presente na figura 3.1, portanto vale a
pena enfatizar que é justamente esta queda de velocidade que reside o interesse real do
motorista.
Gráfico da distribuição das forças de frenagem nos eixos dianteiros e traseiros:
A curva denominada de curva de aderência presente no gráfico 3.6, na cor vermelha,
representa a distribuição de forças de frenagem sobre as rodas do eixo dianteiro versus
eixo traseiro, sendo obtida da seguinte forma: Para um determinado coeficiente de
atrito, e um determinado veículo, no qual os valores do centro de gravidade já são
valores conhecidos, fazem-se as devidas substituições nas equações 3.47 (a,b); Esta
fórmula é derivada 3.46 (a,b) onde a resistência ao rolamento é desprezado e ambas
reações de apoio devido a carga dinâmica.é multiplicado pelo coeficiente de atrito do
par solo / pista. Os resultados das equações 3.47 a, e b geram um par de valores, sendo o
primeiro o valor da força de frenagem para eixo dianteiro e o segundo para eixo
traseiro:
Ff1=µGcosα[1-γ+µhl] Eq. 3.47a
Ff2= µGcosα[γ-µhl] Eq.
3.47b
Logo após é feito o mesmo procedimento para um diferente valor de coeficiente de
atrito, fazendo uma varredura do coeficiente de atrito entre 0 e 0,9,sendo gerando
múltiplos pares de valores.
Cada par de valores, gerado pelas equações 3.47 a,b , é plotado em um gráfico onde as
coordenadas X e Y representam as forças de frenagem no eixo dianteiro e traseiro
respectivamente , o mesmo é feito para todos os pares, surgindo então a curva
denominada de curva de aderência.
A variável hl e a distribuição das distâncias entre os eixos e o centro de gravidade
representado pela variável γ são constantes, pois são grandezas relacionadas aos
fatores construtivos e conseqüentemente independem da dinâmica da frenagem.
As retas que cruzam a curva de aderência são regidas pela equação 3.48 que deriva
da equação 3.45, e são denominadas de retas de distribuição da frenagem traseira em
função da frenagem na dianteira:

Ff2=Ff1+µGcosα Eq. 3.48
Uma reta em particular possui o segundo termo da equação 3.48, µGcosα ,
constante.E intercepta a curva de aderência para um coeficiente de atrito em comum
entre ambas curvas.
Portanto para um veículo em particular com um determinado peso, variando o
coeficiente de atrito, de 0,1 em 0,1, obtém-se uma família de retas.
O gráfico 3.6 mostra a curva de aderência de um determinado veículo e a família de
retas que são regidas pela equação 3.48.
Gráfico 3.6 Curva de aderência
Relação entre a curva real versus ideal:
A curva de aderência representa um caso ideal de distribuição de esforços, a ser
cumprido pelo sistema hidráulico, ou seja, se o sistema hidráulico atuar de forma a
surgir esforços que reduzem a componente de velocidade tangencial no contato pneu /
pista, conforme a distribuição de esforços da curva de aderência, presente no gráfico
3.6, a velocidade de translação seria reduzida simultaneamente com a redução da
velocidade tangencial, traduzindo em controle do automóvel.
Para uma condição ideal a velocidade de translação do automóvel, seria igual à
velocidade tangencial do pneu, não ocorrendo escorregamento conforme a equação 3.15
, o que justifica o nome de curva de aderência.
Porém como a característica das curvas de distribuição de forças nos eixos traseiros e
dianteiros, promovido pelo sistema hidráulico é linear, conforme o gráfico 3.2, muito
diferente do aspecto da curva de aderência. A reta de distribuição real de forças de
frenagem pode cruzar apenas em um único ponto, a curva de aderência, para tanto o
sistema de frenagem é dimensionado de forma a atuar como um sistema ideal somente
para o maior valor de coeficiente de atrito, evidenciado pelo ponto em comum entre
ambas as curvas, pois são sobre circunstâncias limítrofes que o sistema de frenagem
deve atuar de forma segura.
O gráfico 3.7 representa uma circunstância ideal (também denominada de curva de
aderência) de distribuição de frenagem, teoricamente a ser cumprido pelo sistema
hidráulico, juntamente com uma reta real que demonstra exatamente como o sistema
hidráulico se comporta.
A curva de aderência cruza com a reta real de distribuição de frenagem, no ponto onde a
curva de aderência também cruza com a reta que representa o coeficiente de atrito
máximo.
Gráfico 3.7 Distribuição das forças sobre o pneu
Resultados
Desenvolvimento do Algoritmo.
O algoritmo foi desenvolvido na forma de fluxograma com base nas informações
levantadas mediante a um questionário feito pela equipe sendo este aplicado para um
piloto da equipe BAJA da Universidade Federal do Paraná, e para um projetista
experiente da equipe BAJA da Universidade Tecnológica Federal do Paraná, além de
projetistas da equipe de Fórmula SAE da Universidade Tecnológica Federal do Paraná.
Dimensionamento de freio a disco para projetos BAJA e Fórmula SAE
Tamanho do Disco

Peso do Disco
Material do Disco
Item de maior preocupação, o programa deve solucionar de forma eficiente se o
tamanho do disco é compatível com as necessidades dos projetistas.
Irrelevante, pois seu valor é muito inferior ao peso do pneu cheio junto com a roda.
Materiais já pré-determinados.
Logo em seguida a equipe particularizou o item tamanho do disco e fez uma série de
questionamentos aos mesmos entrevistados e assim foram obtidos os seguintes
resultados:
Variáveis das quais dependem o tamanho do disco.
Pedal
O esforço do piloto sobre o pedal deve seguir normas de ergonomia, tendo em vista a
duração longa da própria competição.
Tamanho deve ser compatível com o espaço que este elemento mecânico irá dividir com
o piloto.
Inexistência de servo-freio devido a falta de espaço e devido a restrições financeiras.
Resultando em um maior peso de importância a força que o piloto aplica sobre o pedal
Cilindro-mestre comprado através de fabricantes especializados e assim não é
fabricado pela própria equipe.
O programa deve oferecer o valor da pressão do fluído de freio.
Alguns fabricantes de pinça de freio, possuem características próprias, como número
múltiplos de pistões por pinça além de possuir um único pistão com diâmetro diferente
dos demais, então o programa deve cobrir casos de projetos que venham utilizar estas
pinças.
O programa deve oferecer catálogos de pastilhas de freio, além de um valor aproximado
para o coeficiente de atrito do par disco/pastilha.
Os valores devem ser o mais preciso possível, para tanto, no caso do pneu, o programa
faz o dimensionamento em função do raio dinâmico.
Fluxograma 4.1 Levantamento das necessidades dos projetistas.
Programa
Tendo em vista o número de gráficos que o programa deverá executar a fim de que se
possa cobrir de forma eficiente todo o conteúdo apresentado pelos livros, dos quais
foram feitas a fundamentação teórica, a equipe optou por fazer o programa em
linguagem “C++”, utilizando o software da Borland chamado “Builder”.
O objetivo do software é dinamizar o processo de dimensionamento de disco, de forma
a oferecer ao projetista uma resposta que seja ao mesmo tempo clara, e principalmente
viável tendo em vista as necessidades levantadas mediante ao questionário apresentado
pelo fluxograma 4.1.

Os dados de entrada são as dimensões dos elementos mecânicos que fazem parte do
sistema de frenagem, além de dados mais específicos sobre o próprio veiculo como a
localização do centro de massa, e o peso do automóvel.
Os dados de saída poderão ser o esforço que o motorista aplica sobre o pedal, ou para
um dado esforço e sob a limitação do diâmetro interno da roda, o diâmetro do disco, o
software também oferece ao projetista um gráfico retratando a divisão de forças durante
a frenagem para um coeficiente de atrito diferente do desejado, podendo desta forma
analisar e prever o comportamento da roda, sob diversas condições.
Outro dado de saída do software é um relatório no qual constam os cálculos que o PC
executa interiormente, oferecendo assim ao projetista a rotina executada pela máquina.
Apresentação do programa
Como mostra a figura 4.1, inicialmente nesta primeira tela chamada de tela principal o
usuário do programa tem somente opção de escolha de clicar no botão “Mecânica Da
Frenagem” para preenchimento de dados:
Figura [ 4 ].1 Janela Parâmetro De Dimensionamento
Ao clicar no botão “Mecânica da Frenagem” será aberta a tela de dados do veículo onde
o usuário irá preencher os dados obrigatórios do veículo como mostra a figura 4.2.
Figura [ 4 ].2 Janela “Dados do veículo”
Se todos dados forem corretamente preenchidos ao clicar o botão “Ok” aparecerá uma
nova tela com os primeiros resultados obtidos como mostra figura 4.3.
Figura [ 4 ].3 Janela “Resultados” da mecânica da frenagem
Ao clicar no botão “Sistema de Frenagem”, na Janela “Parâmetros de
dimensionamento” será aberta a Janela “Escolha do parâmetro de dimensionamento”.
Nesse momento o usuário deve decidir se realiza o dimensionamento do diâmetro do
disco em função de um valor de força aplicada no pedal fornecida por ele, ou se ele
fornece o diâmetro do disco para o programa fornecer um valor da força necessária a ser
aplicada no pedal para a frenagem como mostra a figura 4.4.
.
Figura [ 4 ].4 Janela escolha do parâmetro para dimensionamento
Ao escolher a primeira opção e clicar no botão “Ok” será aberta a próxima tela referente
aos dados do pedal de freio onde o usuário deve obrigatoriamente preencher os campos
onde existe a janela em preto e vermelho “Dado obrigatório” como mostra a figura 4.5.
Observa-se também que o programa avisa a restrição que o usuário deverá observar ao
preencher a razão de proporção do pedal devido ao espaço limitado que o pedal deverá
dividir com o motorista. Foi estabelecido que o valor fornecido pela força do motorista
sobre o pedal não pode ultrapassar o valor de 100 lbf (444,82N) para garantir assim a
segurança e conforto do motorista.
Figura [ 4 ].5 Janela dados do sistema de frenagem aba pedal
Na segunda escolha os dados são referentes ao cilindro-mestre e ao preencher o

diâmetro da pinça o programa calcula automaticamente a área da câmara interna do
cilindro-mestre como mostra a figura 4.6.
Figura [ 4 ].6 Janela dados do sistema de frenagem aba cilindro-mestre
Na terceira opção os dados são referentes a pinça de freio como mostra a figura 4.7.
Alguns fabricantes de pinça de freio utilizam não apenas um único pistão por pinça, mas
múltiplos, e até mesmo um com diâmetro diferente dos demais. Para que o programa
possa calcular a área total utilizada foi projetada esta janela. Porém como a grande
maioria das pinças nos projetos da UTFPR tem somente um único pistão por pinça, foi
deixado como um valor de default 1(um) para o número de pistões e 0 (zero) como o
diâmetro de pistão diferente dos pistões múltiplos presentes na pinça.
Figura [ 4 ].7 Janela dados do sistema de frenagem aba pinça de freio
Na quarta opção os dados são referentes a pastilha de freio como mostra a figura 4.8.
Nesta tela é necessário o preenchimento do valor coeficiente de atrito entre o disco e a
pastilha.
Figura [ 4 ].8 Janela dados do sistema de frenagem aba pastilha de freio
Na quinta opção os dados são referentes ao disco de freio, o diâmetro interno da roda
deve ser informado para que o programa julgue a viabilidade do diâmetro do disco
dimensionado, como mostra a figura 4.9.
Figura [ 4 ].9 Janela dados do sistema de frenagem aba disco de freio
Na sexta opção os dados são referentes ao pneu como mostra a figura 4.10.
Figura [ 4 ].10 Janela dados do sistema de frenagem aba pneu
Os dados resultados dos valores informados são plotados de acordo com o gráfico
presente na tela “Gráfico da distribuição de força de frenagem entre eixos”,de acordo
com a figura 4.11:
Figura [ 4 ].11 Janela resultados e gráfico de distribuição de forças de frenagem
4.3 Validação do programa.
Para validação do conteúdo da revisão bibliográfica e o algoritmo usado no programa
será utilizado um exemplo de dimensionamento de freio a disco para um protótipo
BAJA da UTFPR em 2009.
1º Passo
O primeiro passo a ser tomado será o levantamento de dados total do projeto, todos os
dados que serão obrigatórios, afim de poder preencher de forma correta os campos
obrigatórios presente no programa.
Massa do veículo | 275 Kg |
Altura do centro de gravidade do veículo | 0,63 m |
Distância entre CG e eixo dianteiro (a1) | 0,95 m |
Distância entre CG e eixo traseiro a2 | 0,78 m |
Distância total entre os eixos (l) | 1,73 m |
Raio dinâmico do pneu | 25,4cm |

Diâmetro do disco | 198 mm |
Coeficiente de atrito do pneu/pista | 0,5 |
Diâmetro do embolo do cilindro-mestre | 20 mm |
Diâmetro do pistão da pinça | 30 mm (1UNIDADE POR PINÇA) |
Razão de proporção | 7:1 |
Tabela 4.1 Levantamento de dados
2º Passo
Ao abrir o programa, o projetista depara com a primeira tela,ver figura 4.12, vale a pena
frisar neste momento que o maior propósito da cinemática de frenagem é a redução da
velocidade de translação do veículo, portanto serão os dados referente a mecânica de
frenagem que irão determinar todos os demais parâmetros envolvidos na frenagem do
veículo,inclusive os que fazem parte do sistema de frenagem.
Portanto o usuário terá de obrigatoriamente clicar no botão chamado mecânica da
frenagem.
Figura [ 4 ].12 Tela de abertura do programa de dimensionamento do freio.
3º Passo
Para o cálculo da força de frenagem que irá atuar contra a velocidade de translação do
sistema será necessário preencher todos os campos obrigatórios presentes no campo
chamado valores obrigatórios,da janela dados do veículo,ver figura 4.13. Caso algum
valor obrigatório não ser devidamente preenchido, aparecerá um indicador no devido
campo que não foi preenchido a fim de orientar o projetista da necessidade deste valor,
ver figura 4.14, Caso o projetista não tenha os valores do centro de massa, com exceção
da altura, mas possua os valores dos pesos obtidos mediante ao uso de balança nas
quatro rodas, ao preencher estes dados dos pesos lidos pela balança nos respectivos
campos referentes a localização destas balanças , ao clicar no botão calcular centro de
gravidade, o programa preencherá automaticamente os valores dos centros de massa,ver
figura 4.15 ,nos campos distância entre o eixo dianteiro e o centro de massa e distância
entre o eixo traseiro e centro de massa.
Figura [ 4 ].13 Tela para preenchimento de dados obrigatórios para o cálculo da força
de frenagem devido a interação entre o solo e o pneu.
Figura [ 4 ].14 Exemplificação após clicar botão “Ok” sem ter feito o preenchimento
correto dos campos obrigatórios.
Figura [ 4 ].15 Campo para o cálculo das distâncias entre os eixos e o ponto onde esta
localizado o centro de gravidade do veículo.
4º Passo
Logo após o preenchimento de todos os dados obrigatórios presentes na janela Dados
do veículo, ao clicar o botão “Ok”, aparecerá uma janela com nome Resultados nas
quais estarão impressos os valores das forças de frenagem, nos respectivos eixos,
devido a interação pneu solo. Conforme a figura 4.16.
Figura [ 4 ].16 Mostra os valores dos resultados obtidos através dos dados fornecidos
pela janela anterior.

Ao clicar o botão “Ok” da janela “Resultados”, todos os campos serão limpos e as
variáveis serão guardadas na memória RAM do PC, ao clicar o botão “Voltar” será
exibido a tela Dados do Veículo e o usuário terá liberdade de alterar as variáveis que
desejar e verificar a influência desta alteração nos resultados que serão impressos na
“Tela Resultados”.
5º Passo
Como serão os valores da mecânica de frenagem os valores preponderantes em toda a
cinemática da frenagem, é obrigatório que os primeiros valores a serem preenchidos
devam ser acessados pelo primeiro botão da tela que é o botão “Mecânica da frenagem,
ver figura 4.1.
Ao clicar em sistema de frenagem, na janela inicial, abrirá a janela “Escolha do
parâmetro para dimensionamento” que solicitará ao projetista se ele possui de antemão,
o tamanho de um disco, e quer como resultado a força necessária a ser aplicada no
pedal, ou para uma dada força aplicada pelo motorista sobre o pedal qual será o disco
necessário a vir a suprir a frenagem. A figura 4.17 mostra a janela Escolha do Parâmetro
para Dimensionamento.
Figura [ 4 ].17 Escolha do parâmetro para dimensionamento.
Para o exemplo inicial como temos o raio do disco, o projetista deve selecionar pela
opção “Dimensionamento do pedal em função do raio do disco”. Se clicar o botão
“Voltar” o programa abre a janela inicial..
6º Passo
Em seguido o projetista informará os dados referentes aos elementos mecânicos que
fazem parte do sistema de frenagem, sendo o primeiro deles o pedal, ver figura 4.18.
Para a aba “Pedal” observa-se que o campo referente a força do pé do motorista sobre o
pedal, não esta habilitado para preenchimento, pois este será um dado a ser
dimensionado conforme o aviso ao lado do campo Força do pé sobre o pedal,ver figura
4.19. Observa-se um comentário nesta janela referente a razão de proporção do pedal
uma vez que este parâmetro foi informado como um limitante a ser observado devido a
acomodação do motorista no BAJA, ver figura 4.20
Nesta janela observa-se também a necessidade de se preencher obrigatoriamente a razão
de proporção do pedal, que é que a razão entre a distância do ponto de aplicação da
forca em relação ao apoio fixo do pedal, e o tamanho do próprio pedal,ver figura 4.21
Figura [ 4 ].18 Visualização da aba “Pedal” na janela dos dados do sistema de
frenagem.
Figura [ 4 ].19 Mostruário do campo a ser dimensionado na Aba Pedal
Figura [ 4 ].20 Aviso de cuidado no preenchimento do campo correspondente a razão
de proporção.
Figura [ 4 ].21 Mostruário do campo obrigatório a ser preenchido.
Ao abrir a aba de nome “Cilindro- Mestre” o projetista deverá ter o valor do diâmetro
do cilindro-mestre,ver figura 4.22.
O programa oferece ao projetista os valores dos diâmetros dos cilindros-mestre
presentes em um catálogo da Bosch, ao clicar no botão chamado catálogo. Uma vez que

os valores dos diâmetros presentes no catálogo estão em polegadas, o programa oferece
ao projetista a possibilidade de uma conversão automática, para o sistema métrico, ao
preencher devidamente o numerador e denominador, correspondente ao sistema de
polegadas, e clicar em conversão de “pol” para “mm” o campo diâmetro do cilindro-
mestre será preenchido com a medida já convertida, caso o projetista já tenha o valor do
diâmetro em milímetros o programa calcula a área do cilindro mestre em milímetros
quadrados automaticamente.
Outra observação importante da aba do “Cilindro-Mestre” é o campo que oferece o
valor da pressão que o fluído de freio está submetido, este valor será fornecido pelo
programa somente quando os valores de todos elementos mecânicos do sistema de
frenagem forem devidamente preenchidos pelo usuário e o botão “Calcular” ser clicado,
ver figura 4.23.
Figura [ 4 ].22 Janela Dados do Sistema de Frenagem Aba Cilindro-Mestre
Figura [ 4 ].23 Mostruário do dado de entrada e do dado de saída da aba Cilindro-
mestre
A aba “Pinça de Freio” deverá ser preenchida com os valores dos diâmetros dos pistões
presentes em cada pinça, o sistema calcula a área total por pinça, algumas pinças
presentes no mercado além de oferecerem vários pistões por pinça oferecem algum com
diâmetros diferentes dos demais, em uma mesma pinça.
Portanto o projetista deve preencher o diâmetro do pistão da pinça, e se houver mais de
uma pinça em um pistão deve preencher quantos pistões a pinça possui, no campo
referente a número de pistões. Além disto, o usuário deverá informar o diâmetro do
pistão da pinça que possua diâmetro diferente dos demais, ver figura 4.24.
Nesta aba devido a multiplicidade de tipos de pinça se faz necessário logo após o
preenchimento de todos os campos, exceto o campo referente a ganho de força, clicar o
botão chamado “Calcular Ganho/Área Total dos Cilindros”.
O campo ganho de força mede o ganho devido a pressão hidráulica. Como a pressão é
constante em todo o fluído, espera-se um ganho que seja diretamente proporcional as
áreas, ver equação 3.6(a,b) , ver figura 4.25.
Figura [ 4 ].24 Janela Dados do sistema de frenagem,aba Pinça de Freio
Figura [ 4 ].25 Mostruário do campo Ganho de força
A aba “Pastilha de Freio” para o dimensionamento, tanto do disco de freio
quanto para a força do usuário sobre o pedal, terá apenas um campo relevante que é o
coeficiente de atrito da pastilha /disco, ver figura 4.26.
Figura [ 4 ].26 Campo coeficiente de atrito entre o par disco/pastilha.
A aba disco de freio contém um unico campo que deverão ser preenchidos
obrigatoriamente informados pelos avisos ao lado, o projetista ao informar o tamanho
do disco do diâmetro do disco o campo, raio para o cálculo de torque sobre o disco de
freio, é preenchido automaticamente, ver figura 4.27, e ver figura 4.28, apesar de não
obrigatório seria interessante o usuário preencher o campo diâmetro interno da roda
afim de comparar com o diâmetro que ele próprio esta oferecendo.

Figura [ 4 ].27 Mostruário da aba disco de freio da janela de dados do sistema de
frenagem.
Figura [ 4 ].28 Campo obrigatório para ser calculada a força do motorista sobre o
pedal.
A aba Pneu requer do usuário o preenchimento do campo “Diâmetro do Pneu”, ao
informar este dado o programa preenche automaticamente o campo referente ao raio
dinâmico do pneu, ver figura 4.29 e figura 4.30.
Figura [ 4 ].29 Mostruário da aba “Pneu” da janela de dados do sistema de frenagem.
Figura [ 4 ].30 Campo Raio dinâmico do pneu.
7º Passo
Após o preenchimento de todos os campos obrigatórios ao clicar o botão “Calcular” a
aba onde se encontra o campo a ser dimensionado é aberta, ver figura 4.32. No caso de
existir um dado faltante ao clicar o botão “Calcular” o programa procura a aba onde se
encontra o item faltante e abre-a para o usuário, ver figura 4.31. Vale a pena frisar que
os dados obrigatórios para o presente dimensionamento que está sendo realizado segue
com precisão os valores retirados da tabela. .
Figura [ 4 ].31 Aba aberta após o acionamento do botão “Calcular”.
Figura [ 4 ].32 Aba aberta após o acionamento do botão “Calcular” após constados
todos os valores devidamente informados.
No campo de observações aparecerá um aviso contendo aprovação ou reprovação da
força do motorista aplicada ao pedal, para o presente exemplo com o valor do tamanho
do disco informado o programa aprovou os valores informados, ver figura 4.33.
Foi feito o mesmo teste constando os valores de um veículo de grande porte sujeito aos
elementos mecânicos de um BAJA, e foi obtido o resultado de reprovação, conforme
visto na figura 4.34
Figura [ 4 ].33 Aba aberta após o acionamento do botão “Calcular”, após constados
todos os valores devidamente informados.
Figura [ 4 ].34 Mostruário de reprovação do sistema de frenagem
8º Passo
Afim de que se possam analisar as forças de frenagem promovidas pelo sistema de
frenagem e compará-los com os valores das forças de frenagem promovidos pelo
contato pneu-pista, fora da condição ideal, (condição na qual a força de frenagem
promovida pelo sistema hidráulico se iguala a força de frenagem promovida pelo
contato pneu-pista). O programa oferece ao usuário o gráfico mostrado na figura 4.35
Figura [ 4 ].35 Gráfico gerado pelo programa
A curva em azul é denominada de curva de aderência ou curva ideal. Pois ocorreria a
aderência do pneu com a pista se a curva do sistema de frenagem (curva em
vermelho),fosse coincidente com a curva de aderência, porém como o aspecto das
curvas é diferente,e as duas terão somente um único valor igual que foi para o presente

exemplo determinado para um valor de coeficiente de atrito do par pneu/pista na ordem
de 0,5 (curva em verde).
As curvas em negrito são curvas de distribuição de forças de frenagem e para uma única
reta tem-se o coeficiente de atrito do par solo-pista constante e para todas retas um
mesmo valor de peso do veículo, portanto os pontos em que a curva em negrito cruza
tanto com a curva de aderência quanto com a curva fornecida pelo sistema hidráulico
possuem o mesmo valor de atrito do par pneu/solo.
A fim de que se possa avaliar como são distribuídas as forças para um veículo não mais
na condição ideal o programa oferece um grupo de selecionadores conforme a figura
4.36
Figura [ 4 ].36 Campo dos selecionadores.
A fim de que se possa exemplificar toma-se um valor de atrito para o pneu/pista de 0.4
diferentemente de 0.5 (onde o sistema se comporta de forma ideal),ver figura 4.37
Figura [ 4 ].37 Mostruário das forças obtidas através do gráfico 3.24.
Observa-se através da figura 4.37 que para esta circunstância o valor da força real
promovida pelo sistema de frenagem excede a força ideal, para o eixo dianteiro, se a
força promovida pelo sistema de frenagem fosse igual a força ideal ocorreria aderência
entre o pneu e a pista. Como a força do sistema de frenagem atua sobre o movimento de
rotação excede o valor da força que o solo aplica sobre a velocidade de translação do
carro, via coeficiente de atrito do par pneu/pista, para esta circunstancia em particular,
com o coeficiente de atrito do par pneu/pista diferente do valor de projeto, observa-se o
travamento da roda e por conseqüência o escorregamento do pneu dianteiro. No caso
contrário onde a força real é menor que a força ideal ocorre a queda abrupta da
velocidade de translação do veículo com as rodas ainda girando, este efeito é conhecido
como patinação e suas conseqüências estão atreladas ao desgaste do pneu.
9º Passo
Depois de feito todos os devidos cálculos o programa oferece ao usuário um relatório no
qual constam os dados de entrada, bem como os dados de saída devolvidos pelo
programa. No relatório constam todos os cálculos que a máquina executou em sua
programação. Ver figura 4.38
[ 4 ].38 Relatório total oferecido pelo programa.
4.4 Limitações do software
Devido a falta de informação a respeito do compartimento que o piloto terá de dividir
com o pedal, não foi possível quantificar um dado valor na qual o programa informaria
como um valor impróprio, em resposta ao preenchimento indevido do campo razão de
proporção do pedal na aba pedal da janela dados do sistema de frenagem, portanto a
única saída foi avisar o projetista quanto ao cuidado no momento de informar os dados
referentes ao pedal, para tanto foi posto uma warning, que avisa ao usuária atenção na
hora do preenchimento dos dados.
4.5 Sugestões para projetos futuros
Tendo em vista futuros projetos, que possam ser destinado a um estudo mais especifico
na área de pastilhas de freio, que possa incluir uma pesquisa a respeito do desgaste que
ocorre na frenagem e seleção de material para pastilha, o software possui na aba

pastilha
De acordo com a figura 4.39, pode-se observar que o usuário para ter mais informações
sobre a pastilha entra com os valores do raio interno, raio externo, e ângulo de abertura
e número de faces de contato.
Figura [ 4 ].39 Mostruário dos valores a serem preenchidos para cálculos referente a
pastilha
De acordo com a figura 4.40 ,pode-se observar que para um momento já pré-
determinado pelos requisitos do projeto,o usuário pode escolher entre o critério de
pressão uniforme ou desgaste uniforme, logo em seguido faz-se a escolha de que
incógnita a ser calculada.
Figura [ 4 ].40 Mostruário da seleção de critério e das incógnitas de saída.
De acordo com a figura 4.41, mostra os campos que o programa irá preencher para a
incógnita selecionada:
Figura [ 4 ].41 Mostruário dos dados de saída para uma determinada configuração de
pastilha.
*
*
*
*
CONCLUSÕES
O objetivo deste trabalho foi alcançado quanto que o verdadeiro intuito era o
dimensionamento do disco de freio para competições que a UTFPR, se faz presente,
foram feitos uma extensa pesquisa nos livros que apresentaram o tema de frenagem,
bem como feita uma pesquisa tanto com projetista e piloto, para levantar todos os dados
que são importantes,para ter como resultado um bom projeto.
O projeto atende tanto as necessidades dos projetistas pois além de serem feitos cálculos
rápido e mostrar como eles foram feito dando uma maior segurança ao usuários,o
programa é baseado em literaturas competentes e confiáveis, de forma que devolve ao
usuário a credibilidade de estar sendo feito cálculos não apenas coerentes,mas como os
que mais se aproxima da realidade.
O presente trabalho gerou um software que calcula de forma rápida e organizada as
forças de frenagem causada pela interação solo/pneu, separa a interferência do solo
sobre o sistema automotivo, do próprio sistema de frenagem sobre o disco, pois
fisicamente são fatores realmente distintos.
O projeto deixa brechas para novas pesquisas, pois abrange todos elementos que fazem
parte do sistema de frenagem, futuros projetos podem discriminar um único elemento e
fazer um estudo amplo e mais profundo a respeito daquele elemento em especifico.A
exemplo do campo pastilha de freio, onde pode-se calcular vários requisitos,de forma a
dinamizar estudos a respeito dos materiais utilizados para a confecção da pastilha por
exemplo.
REFERÊNCIA

ALVAREZ,C.V; IZQUIERDO,F.A; MINDAN,J.F; LÓPEZ,V.D. Diseño y Calculo Del
Sistema de Frenos em Automoviles. Madri: 1995.
GILLESPIE, T.D. Fundamentals of Vehicle Dynamics. USA: SAE - Inc. 1992.
NICOLAZZI,L.C.; ROSA,E.Da; LEAL L.C.M. Uma introdução a modelagem quase-
estática de veículos automotores. Florianópolis: Publicação interna,2008.
PETER, J. B. Applications of Friction Technology. p285-334.
BOSCH. Site comercial da empresa, seção de autopeças.
Disponível em:<http://www.bosch.com.br> Acesso em 01 de maio de 2010.
LAWRENCE K.L ;WOODS,R.L. Modeling and Simulation of Dynamic Systems. New
Jersey: Prentice Hall, 1997.