FACULDADE DE ENGENHARIA DE ILHA SOLTEIRA … · 3.7.1 Transformada de Fourier de seno e co-seno...
169
UNIVERSIDADE ESTADUAL PAULISTA "JÚLIO DE MESQUITA FILHO" FACULDADE DE ENGENHARIA DE ILHA SOLTEIRA DEPARTAMENTO DE ENGENHARIA ELÉTRICA ELE 0331 PRINCÍPIOS DE COMUNICAÇÕES SINAIS E SISTEMAS Ricardo Tokio Higuti & Cláudio Kitano ISA Julho/2003
Transcript of FACULDADE DE ENGENHARIA DE ILHA SOLTEIRA … · 3.7.1 Transformada de Fourier de seno e co-seno...
UNIVERSIDADE ESTADUAL PAULISTA "JÚLIO DE MESQUITA FILHO"
FACULDADE DE ENGENHARIA DE ILHA SOLTEIRA DEPARTAMENTO DE ENGENHARIA ELÉTRICA
ELE 0331 PRINCÍPIOS DE COMUNICAÇÕES
SINAIS E SISTEMAS
Ricardo Tokio Higuti &
Cláudio Kitano
ISA Julho/2003

SINAIS E SISTEMAS
Versão 1.0: 1997 Versão 1.1: 2003
Ricardo Tokio Higuti &
Cláudio Kitano
Departamento de Engenharia Elétrica da Faculdade de Engenharia de Ilha Solteira
UNESP
Todos os direitos reservados. Reprodução por quaisquer meios proibida sem autorização dos autores. Prof. Ricardo Tokio Higuti e-mail: [email protected] 0xx18 3743 1128 Prof. Cláudio Kitano e-mail: [email protected] 0xx18 3743 1226 DEE-FEIS-UNESP Av. Brasil Norte, 364 - Caixa Postal 31 15 385 000 - Ilha Solteira – SP

SINAIS E SISTEMAS
RTH/CK i
Índice: PG.
CAPÍTULO 1: REPRESENTAÇÃO DE SINAIS 11.1 CLASSIFICAÇÃO DOS SINAIS 1 1.1.1 Sinais unidimensionais e multidimensionais 3 1.1.2 Sinais de tempo contínuo e de tempo discreto 3 1.1.3 Sinais determinísticos e aleatórios 3 1.1.4 Sinais reais e complexos 4 1.1.5 Sinais limitados no tempo 4 1.1.6 Sinais limitados em amplitude 5 1.1.7 Sinais fisicamente realizáveis 51.2. TRANSFORMAÇÕES DA VARIÁVEL INDEPENDENTE 5 1.2.1 Rebatimento ou espelhamento 5 1.2.2 Compressão e expansão 6 1.2.3 Deslocamento no tempo 6 1.2.4 Relações de simetria 7 1.2.5 Sinais periódicos 71.3. SINAIS ELEMENTARES 8 1.3.1. Sinais senoidais eternos 8 1.3.2. Exponencial real 9 1.3.3. Exponencial complexa periódica 9 1.3.4. Exponencial complexa - caso geral 11 1.3.5. Função sinc 12 1.3.6. Função pulso triangular 12 1.3.7. Função pulso Gaussiano de área unitária 131.4 FUNÇÕES DESCONTÍNUAS 13 1.4.1 Função degrau unitário 13 1.4.2. Função sinal 14 1.4.3. Função porta ou pulso unitário 14 1.4.4. Função impulso 15 1.4.5 Sobre a existência do impulso 17 1.4.6 Impulsos no limite 181.5 CONVOLUÇÃO DE SINAIS 201.6 SINAIS DE ENERGIA E SINAIS DE POTÊNCIA 26 1.6.1 Sinais de Energia 27 1.6.2 Sinais de Potência 281.7. FUNÇÕES DE BESSEL DE PRIMEIRA ESPÉCIE 301.8 EXERCÍCIOS 32
CAPÍTULO 2: ANÁLISE DE SINAIS PERIÓDICOS : SÉRIE DE FOURIER 352.1 FASORES GIRANTES 35 2.1.1 Espectro de linhas unilateral 36 2.1.2 Espectro de linhas bilateral 38 2.2. PRODUTO ESCALAR – SEMELHANÇA ENTRE SINAIS 392.3 SÉRIE DE FUNÇÕES 43 2.3.1 Ortogonalidade de funções reais 43 2.3.2 Ortogonalidade de Funções Complexas 48 2.3.3 Série trigonométrica de Fourier 50

ÍNDICE
RTH/CK ii
2.3.4 Série de Fourier-Legendre 51 2.3.5 A Série exponencial de Fourier 52 2.3.6 Representação de uma função periódica pela série de Fourier 522.4 ESPECTRO DE FREQUÊNCIA DISCRETO 552.5 EXISTÊNCIA DA SÉRIE DE FOURIER 592.6- FÓRMULA DE PARSEVAL E DISTRIBUIÇÃO DE POTÊNCIA 622.7 EXERCÍCIOS 63 CAPÍTULO 3: ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO 653.1 A TRANSFORMADA DE FOURIER 67 3.1.1. Pulso retangular de duração (função porta) 69 3.1.2. Impulso de área unitária 713.2 CONVERGÊNCIA DA TRANSFORMADA DE FOURIER 713.3 RELAÇÕES DE SIMETRIA 733.4 TEOREMA DE PARSEVAL 753.5 LARGURA DE BANDA ESPECTRAL 763.6. RELAÇÃO ENTRE A TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO E SINAIS PERIÓDICOS 783.7. TRANSFORMADA DE FOURIER DE SINAIS PERIÓDICOS 78 3.7.1 Transformada de Fourier de seno e co-seno eternos 803.8. PROPRIEDADES DA TRANSFORMADA DE FOURIER 81 3.8.1 Linearidade 82 3.8.2 Deslocamento no tempo 82 3.8.3 Teorema da dualidade 83 3.8.4 Translação em frequência 84 3.8.5 Escalonamento no tempo e frequência 85 3.8.6 Propriedade das áreas 85 3.8.7 Diferenciação e integração no tempo 85 3.8.8 Diferenciação e integração em frequência 87 3.8.9 Convolução e multiplicação 87 3.8.10 Modulação real 883.9 TRANSFORMADAS NO LIMITE 90 3.9.1. Função sinal 90 3.9.2. Função constante 91 3.9.3. Degrau unitário 923.11 EXERCÍCIOS 93 CAPÍTULO 4: ANÁLISE DE SISTEMAS 994.1. INTRODUÇÃO 994.2. CARACTERÍSTICAS DE SISTEMAS 100 4.2.1 Sistemas com e sem memória 100 4.2.2. Inversibilidade e sistemas inversos 101 4.2.3. Causalidade (ou realizabilidade) 102 4.2.4. Estabilidade 102 4.2.5. Invariância no tempo 103 4.2.6. Linearidade 1054.3 RESPOSTA EM FREQUÊNCIA 1084.4 RESPOSTA PARA SINAIS ARBITRÁRIOS 1114.5 RESPOSTA IMPULSIVA E RESPOSTA EM FREQUÊNCIA 113
SINAIS E SISTEMAS
RTH/CK iii
4.5.1 Associação de SLITs 118 4.5.2 Resposta impulsiva, estabilidade e causalidade 1194.6 TRANSMISSÃO SEM DISTORÇÃO 120 4.6.1 Distorção linear e não-linear 121 4.6.2 Equalização 1214.7 FILTROS IDEAIS 1234.8 TRANSFORMADA DE HILBERT 1254.9 EXERCÍCIOS 130 CAPÍTULO 5: AMOSTRAGEM DE SINAIS 1335.1. AMOSTRAGEM DE SINAIS 133 5.1.1 Amostragem ideal 134 5.1.2 Efeito de subamostagem sobre sinais senoidais 1405.2 RECONSTRUÇÃO DO SINAL 1415.3 AMOSTRAGEM POR PULSOS 1425.4 EXERCÍCIOS 147 CAPÍTULO 6: CORRELAÇÃO DE SINAIS 1496.1. DENSIDADES ESPECTRAIS DE POTÊNCIA E DE ENERGIA 1496.2. CORRELAÇÃO ENTRE SINAIS DE POTÊNCIA 150 6.2.1. Valor médio temporal 150 6.2.2. Produto escalar 150 6.2.3. Função de correlação cruzada 151 6.2.4. Função de autocorrelação 1516.3. CORRELAÇÃO ENTRE SINAIS DE ENERGIA 1536.4. CORRELAÇÃO ENTRE ENTRADA E SAÍDA EM SLIT 1556.5. TEOREMA DE WIENER-KINCHINE 1576.6. EXERCÍCIOS 158 BIBLIOGRAFIA 161

SINAIS E SISTEMAS
1
CAPÍTULO 1: REPRESENTAÇÃO DE SINAIS
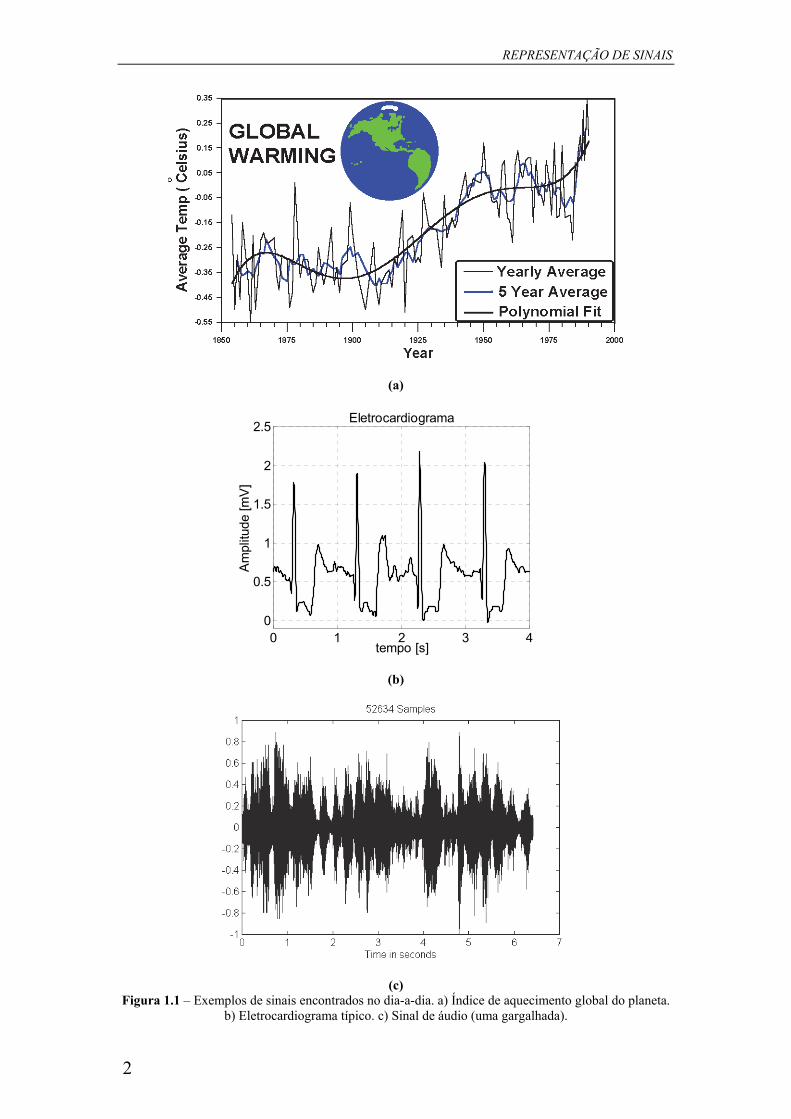
No dia-a-dia, quase que constantemente nos deparamos com sinais. Um sinal geralmente contém informação sobre algum fenômeno ou acontecimento. Quando falamos ao telefone, a voz, que é um sinal acústico, é convertida em sinais elétricos pelo microfone. Este sinal elétrico é transmitido, por exemplo, por um sistema de satélites e recebido do outro lado da Terra, e convertido novamente num sinal de voz. Quando alguém se submete a um exame de eletrocardiograma, o resultado, que é um indicativo da atividade elétrica do coração, é um sinal que, analisado, mostra as condições cardiológicas do paciente. O índice mensal de inflação ao longo do ano também pode ser considerado um sinal. A energia elétrica que é distribuída para as residências é um sinal senoidal com determinada amplitude e frequência.
Na Fig.1, são ilustrados alguns exemplos de sinais, a saber: a) O índice de aquecimento global do planeta entre os anos de 1850 e 2000; b) Um sinal típico de eletrocardiograma (ECG ou EKG); c) Um trecho de alguns segundos de um sinal de áudio.
Nesta e em outras disciplinas do curso de graduação em engenharia elétrica será de interesse a manipulação desses sinais, quer analógica ou digitalmente. O tipo de processamento que pode ser executado depende muito do tipo do sinal [1]. Na análise do aquecimento global do planeta, por exemplo, objetiva-se extrair informações dos registros de temperatura média medidas ao longo dos anos a fim de detectar tendências. Então, pode-se perguntar: os dados são cíclicos ou periódicos? Normalmente tendem a crescer monotonicamente? Podem ser ajustados por retas ou polinômios? Podem ser estabelecidas previsões futuras com certo grau de confiança? É possível prever medidas de controle de forma a alterar a sua variação temporal de alguma forma?
No caso dos gráficos de ECG pode-se perguntar: qual a forma específica do padrão de ECG? Como ele se desvia daquilo que é conhecido como “característica normal”? E, para os sinais de áudio, pergunta-se, por exemplo se é possível executar o reconhecimento automático da voz? Como executar a conversão de áudio para texto num certo idioma? E quanto a tradução automática de um idioma para outro?
Neste texto pretende-se fornecer as ferramentas básicas para que o leitor possa iniciar os primeiros estudos nas áreas de processamento de sinais, bem como, em instrumentação eletrônica, telecomunicações, dentre outras disciplinas que são abordadas no curso de engenharia elétrica. Neste capítulo inicia-se apresentando-se os sinais, cuja análise será realizada no demais capítulos, juntamente com o estudo de sistemas lineares invariantes no tempo. 1.1 CLASSIFICAÇÃO DOS SINAIS
A seguir são feitas algumas considerações básicas [2] que serão utilizadas posteriormente na análise dos sinais de interesse deste curso:
REPRESENTAÇÃO DE SINAIS
2
(a)
0 1 2 3 40
0.5
1
1.5
2
2.5Eletrocardiograma
tempo [s]
Am
plitu
de [m
V]
(b)
(c) Figura 1.1 – Exemplos de sinais encontrados no dia-a-dia. a) Índice de aquecimento global do planeta.
b) Eletrocardiograma típico. c) Sinal de áudio (uma gargalhada).
SINAIS E SISTEMAS
3
1.1.1 Sinais unidimensionais e multidimensionais
Os sinais citados anteriormente possuem apenas uma variável independente (ano, tempo, etc) e são chamados de unidimensionais. Por outro lado, uma imagem de vídeo é um sinal bidimensional, que indica uma função (luminosidade) com duas variáveis independentes de posição. Uma projeção holográfica ou um diagrama de irradiação de uma antena são sinais tridimensionais com três variáveis de posição. E assim por diante, para o caso de sinais multidimensionais. Neste texto, trabalha-se eminentemente com sinais unidimensionais em função do tempo. 1.1.2 Sinais de tempo contínuo e de tempo discreto
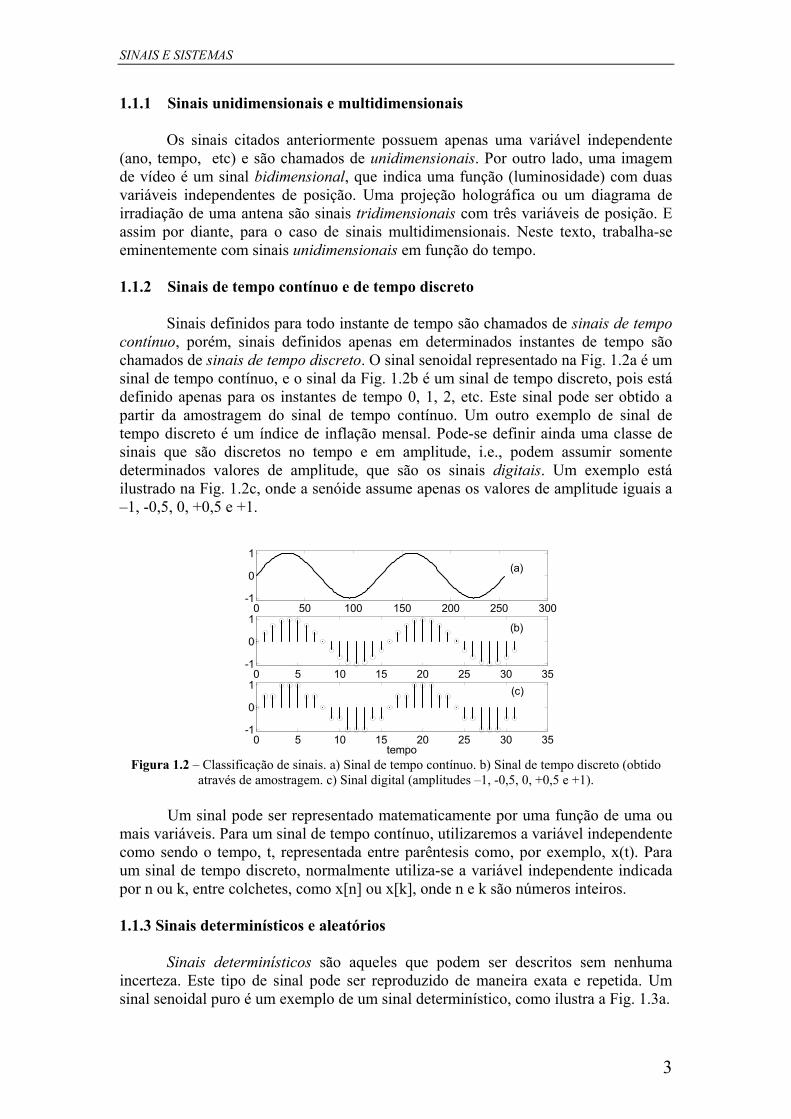
Sinais definidos para todo instante de tempo são chamados de sinais de tempo contínuo, porém, sinais definidos apenas em determinados instantes de tempo são chamados de sinais de tempo discreto. O sinal senoidal representado na Fig. 1.2a é um sinal de tempo contínuo, e o sinal da Fig. 1.2b é um sinal de tempo discreto, pois está definido apenas para os instantes de tempo 0, 1, 2, etc. Este sinal pode ser obtido a partir da amostragem do sinal de tempo contínuo. Um outro exemplo de sinal de tempo discreto é um índice de inflação mensal. Pode-se definir ainda uma classe de sinais que são discretos no tempo e em amplitude, i.e., podem assumir somente determinados valores de amplitude, que são os sinais digitais. Um exemplo está ilustrado na Fig. 1.2c, onde a senóide assume apenas os valores de amplitude iguais a –1, -0,5, 0, +0,5 e +1.
0 50 100 150 200 250 300-1
0
1(a)
0 5 10 15 20 25 30 35-1
0
1(b)
0 5 10 15 20 25 30 35-1
0
1 (c)
tempo Figura 1.2 – Classificação de sinais. a) Sinal de tempo contínuo. b) Sinal de tempo discreto (obtido
através de amostragem. c) Sinal digital (amplitudes –1, -0,5, 0, +0,5 e +1). Um sinal pode ser representado matematicamente por uma função de uma ou
mais variáveis. Para um sinal de tempo contínuo, utilizaremos a variável independente como sendo o tempo, t, representada entre parêntesis como, por exemplo, x(t). Para um sinal de tempo discreto, normalmente utiliza-se a variável independente indicada por n ou k, entre colchetes, como x[n] ou x[k], onde n e k são números inteiros. 1.1.3 Sinais determinísticos e aleatórios
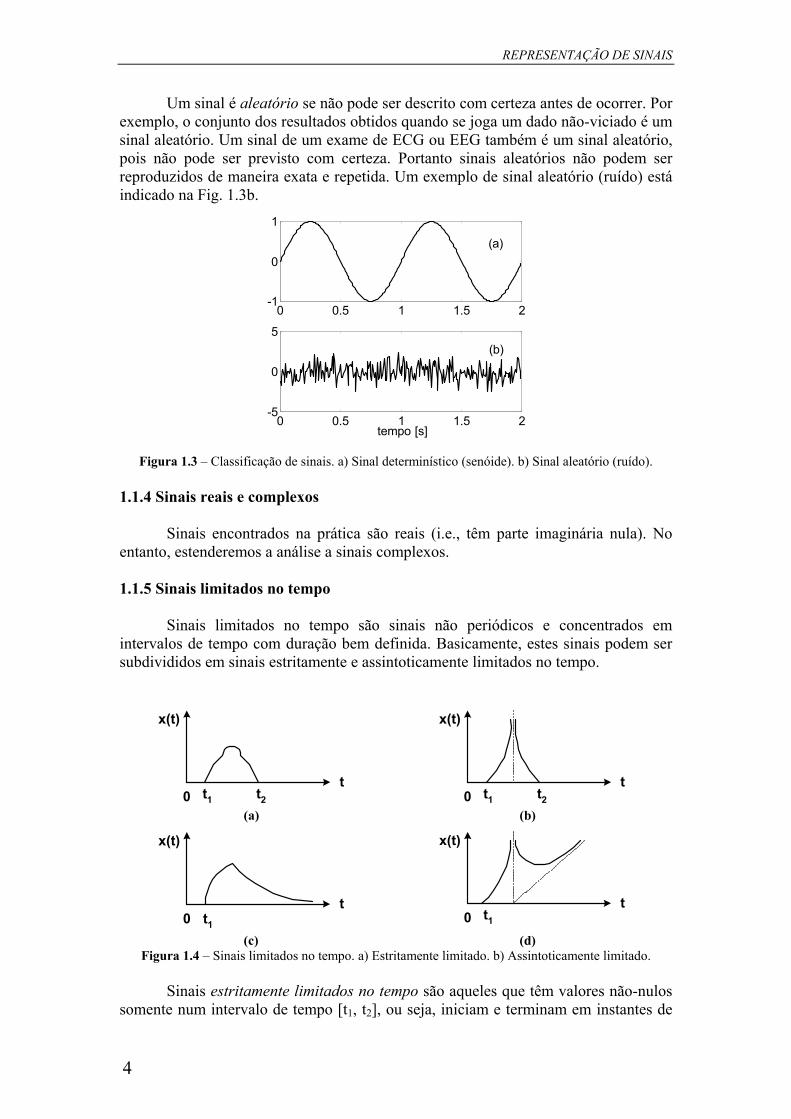
Sinais determinísticos são aqueles que podem ser descritos sem nenhuma incerteza. Este tipo de sinal pode ser reproduzido de maneira exata e repetida. Um sinal senoidal puro é um exemplo de um sinal determinístico, como ilustra a Fig. 1.3a.
REPRESENTAÇÃO DE SINAIS
4
Um sinal é aleatório se não pode ser descrito com certeza antes de ocorrer. Por exemplo, o conjunto dos resultados obtidos quando se joga um dado não-viciado é um sinal aleatório. Um sinal de um exame de ECG ou EEG também é um sinal aleatório, pois não pode ser previsto com certeza. Portanto sinais aleatórios não podem ser reproduzidos de maneira exata e repetida. Um exemplo de sinal aleatório (ruído) está indicado na Fig. 1.3b.
0 0.5 1 1.5 2-1
0
1
(a)
0 0.5 1 1.5 2-5
0
5
tempo [s]
(b)
Figura 1.3 – Classificação de sinais. a) Sinal determinístico (senóide). b) Sinal aleatório (ruído).
1.1.4 Sinais reais e complexos
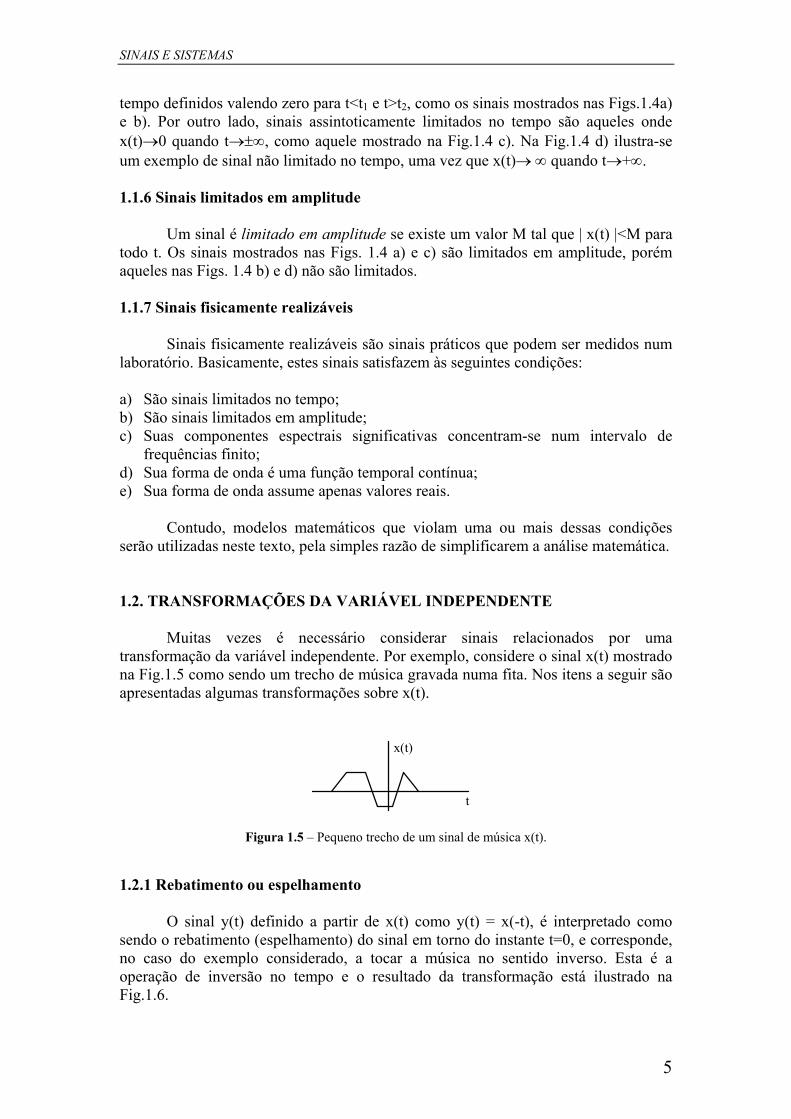
Sinais encontrados na prática são reais (i.e., têm parte imaginária nula). No entanto, estenderemos a análise a sinais complexos. 1.1.5 Sinais limitados no tempo Sinais limitados no tempo são sinais não periódicos e concentrados em intervalos de tempo com duração bem definida. Basicamente, estes sinais podem ser subdivididos em sinais estritamente e assintoticamente limitados no tempo.
0t
t1 t2
x(t)
0t
t1 t2
x(t)
(a) (b)
0t
t1
x(t)
0t
t1
x(t)
(c) (d)
Figura 1.4 – Sinais limitados no tempo. a) Estritamente limitado. b) Assintoticamente limitado.
Sinais estritamente limitados no tempo são aqueles que têm valores não-nulos somente num intervalo de tempo [t1, t2], ou seja, iniciam e terminam em instantes de
SINAIS E SISTEMAS
5
tempo definidos valendo zero para t<t1 e t>t2, como os sinais mostrados nas Figs.1.4a) e b). Por outro lado, sinais assintoticamente limitados no tempo são aqueles onde x(t)0 quando t, como aquele mostrado na Fig.1.4 c). Na Fig.1.4 d) ilustra-se um exemplo de sinal não limitado no tempo, uma vez que x(t) quando t+. 1.1.6 Sinais limitados em amplitude
Um sinal é limitado em amplitude se existe um valor M tal que | x(t) |<M para todo t. Os sinais mostrados nas Figs. 1.4 a) e c) são limitados em amplitude, porém aqueles nas Figs. 1.4 b) e d) não são limitados. 1.1.7 Sinais fisicamente realizáveis Sinais fisicamente realizáveis são sinais práticos que podem ser medidos num laboratório. Basicamente, estes sinais satisfazem às seguintes condições: a) São sinais limitados no tempo; b) São sinais limitados em amplitude; c) Suas componentes espectrais significativas concentram-se num intervalo de
frequências finito; d) Sua forma de onda é uma função temporal contínua; e) Sua forma de onda assume apenas valores reais.
Contudo, modelos matemáticos que violam uma ou mais dessas condições serão utilizadas neste texto, pela simples razão de simplificarem a análise matemática. 1.2. TRANSFORMAÇÕES DA VARIÁVEL INDEPENDENTE
Muitas vezes é necessário considerar sinais relacionados por uma transformação da variável independente. Por exemplo, considere o sinal x(t) mostrado na Fig.1.5 como sendo um trecho de música gravada numa fita. Nos itens a seguir são apresentadas algumas transformações sobre x(t).
t
x(t)
Figura 1.5 – Pequeno trecho de um sinal de música x(t). 1.2.1 Rebatimento ou espelhamento
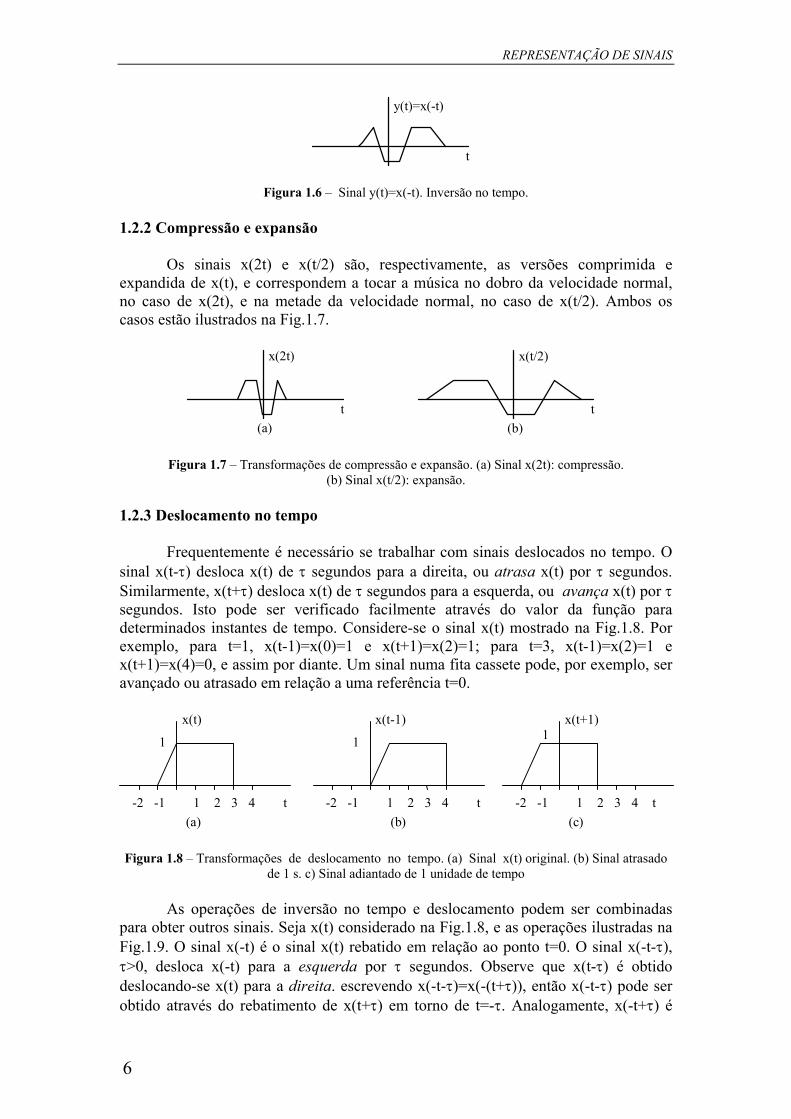
O sinal y(t) definido a partir de x(t) como y(t) = x(-t), é interpretado como sendo o rebatimento (espelhamento) do sinal em torno do instante t=0, e corresponde, no caso do exemplo considerado, a tocar a música no sentido inverso. Esta é a operação de inversão no tempo e o resultado da transformação está ilustrado na Fig.1.6.
REPRESENTAÇÃO DE SINAIS
6
t
y(t)=x(-t)
Figura 1.6 – Sinal y(t)=x(-t). Inversão no tempo. 1.2.2 Compressão e expansão
Os sinais x(2t) e x(t/2) são, respectivamente, as versões comprimida e expandida de x(t), e correspondem a tocar a música no dobro da velocidade normal, no caso de x(2t), e na metade da velocidade normal, no caso de x(t/2). Ambos os casos estão ilustrados na Fig.1.7.
t
x(2t)
t
x(t/2)
(a) (b)
Figura 1.7 – Transformações de compressão e expansão. (a) Sinal x(2t): compressão.
(b) Sinal x(t/2): expansão. 1.2.3 Deslocamento no tempo
Frequentemente é necessário se trabalhar com sinais deslocados no tempo. O sinal x(t-) desloca x(t) de segundos para a direita, ou atrasa x(t) por segundos. Similarmente, x(t+) desloca x(t) de segundos para a esquerda, ou avança x(t) por segundos. Isto pode ser verificado facilmente através do valor da função para determinados instantes de tempo. Considere-se o sinal x(t) mostrado na Fig.1.8. Por exemplo, para t=1, x(t-1)=x(0)=1 e x(t+1)=x(2)=1; para t=3, x(t-1)=x(2)=1 e x(t+1)=x(4)=0, e assim por diante. Um sinal numa fita cassete pode, por exemplo, ser avançado ou atrasado em relação a uma referência t=0.
-2 -1 1 2 3 4 t
x(t)
1
-2 -1 1 2 3 4 t
x(t-1)
1
-2 -1 1 2 3 4 t
x(t+1)1
(a) (b) (c)
Figura 1.8 – Transformações de deslocamento no tempo. (a) Sinal x(t) original. (b) Sinal atrasado de 1 s. c) Sinal adiantado de 1 unidade de tempo
As operações de inversão no tempo e deslocamento podem ser combinadas
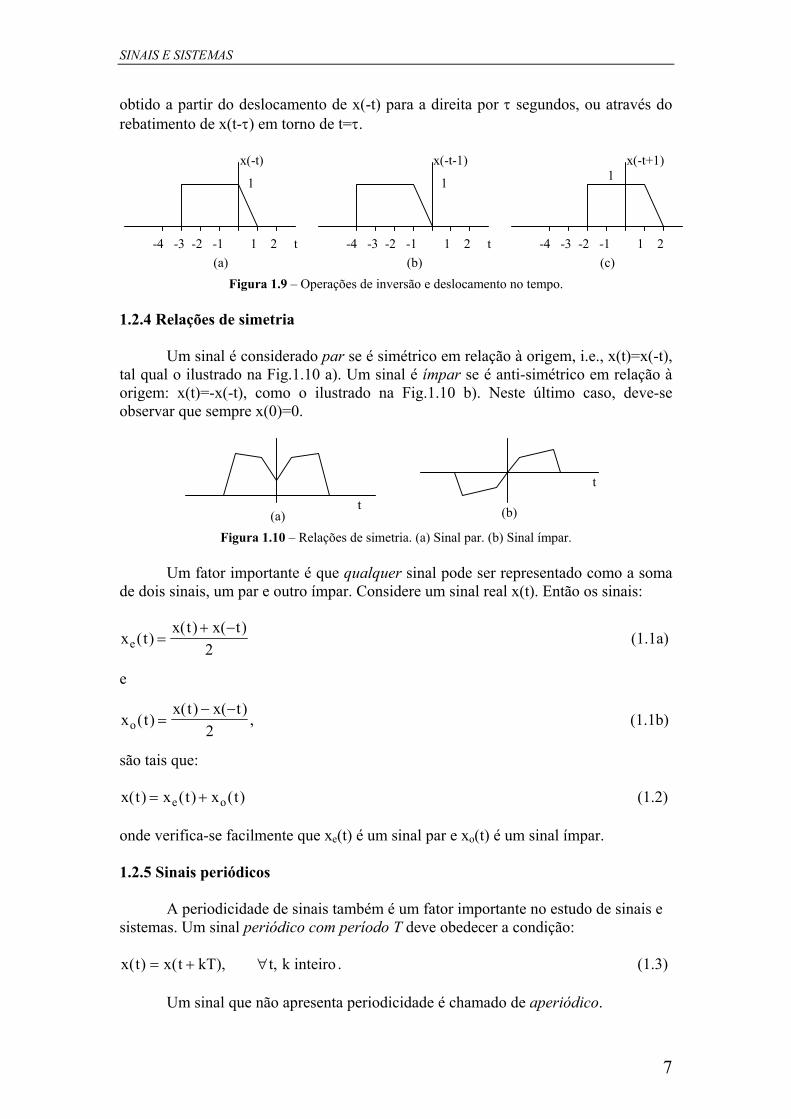
para obter outros sinais. Seja x(t) considerado na Fig.1.8, e as operações ilustradas na Fig.1.9. O sinal x(-t) é o sinal x(t) rebatido em relação ao ponto t=0. O sinal x(-t-), >0, desloca x(-t) para a esquerda por segundos. Observe que x(t-) é obtido deslocando-se x(t) para a direita. escrevendo x(-t-)=x(-(t+)), então x(-t-) pode ser obtido através do rebatimento de x(t+) em torno de t=-. Analogamente, x(-t+) é
SINAIS E SISTEMAS
7
obtido a partir do deslocamento de x(-t) para a direita por segundos, ou através do rebatimento de x(t-) em torno de t=.
-4 -3 -2 -1 1 2 t
x(-t-1)
1
(b)
-4 -3 -2 -1 1 2 t
x(-t)
1
(a)
-4 -3 -2 -1 1 2
x(-t+1)1
(c)
Figura 1.9 – Operações de inversão e deslocamento no tempo. 1.2.4 Relações de simetria
Um sinal é considerado par se é simétrico em relação à origem, i.e., x(t)=x(-t), tal qual o ilustrado na Fig.1.10 a). Um sinal é ímpar se é anti-simétrico em relação à origem: x(t)=-x(-t), como o ilustrado na Fig.1.10 b). Neste último caso, deve-se observar que sempre x(0)=0.
t(a) (b)
t
Figura 1.10 – Relações de simetria. (a) Sinal par. (b) Sinal ímpar.
Um fator importante é que qualquer sinal pode ser representado como a soma
de dois sinais, um par e outro ímpar. Considere um sinal real x(t). Então os sinais:
x tx t x t
e( )( ) ( )
2
(1.1a)
e
x tx t x t
o( )( ) ( )
2
, (1.1b)
são tais que: x t x t x te o( ) ( ) ( ) (1.2) onde verifica-se facilmente que xe(t) é um sinal par e xo(t) é um sinal ímpar. 1.2.5 Sinais periódicos
A periodicidade de sinais também é um fator importante no estudo de sinais e sistemas. Um sinal periódico com período T deve obedecer a condição: x t x t kT( ) ( ), t, k inteiro . (1.3)
Um sinal que não apresenta periodicidade é chamado de aperiódico.
REPRESENTAÇÃO DE SINAIS
8
Um exemplo de um sinal periódico encontra-se ilustrado na Fig.1.11, onde nota-se que o sinal também é periódico com 2T, 3T,...
t
......
T 2T-T
x(t)
Figura 1.11 - Sinal periódico com período T.
1.3. SINAIS ELEMENTARES
Os sinais básicos apresentados a seguir são importantes isoladamente, na representação de sinais mais complexos e no estudo de sistemas em geral [3], [4]. 1.3.1. Sinais senoidais eternos
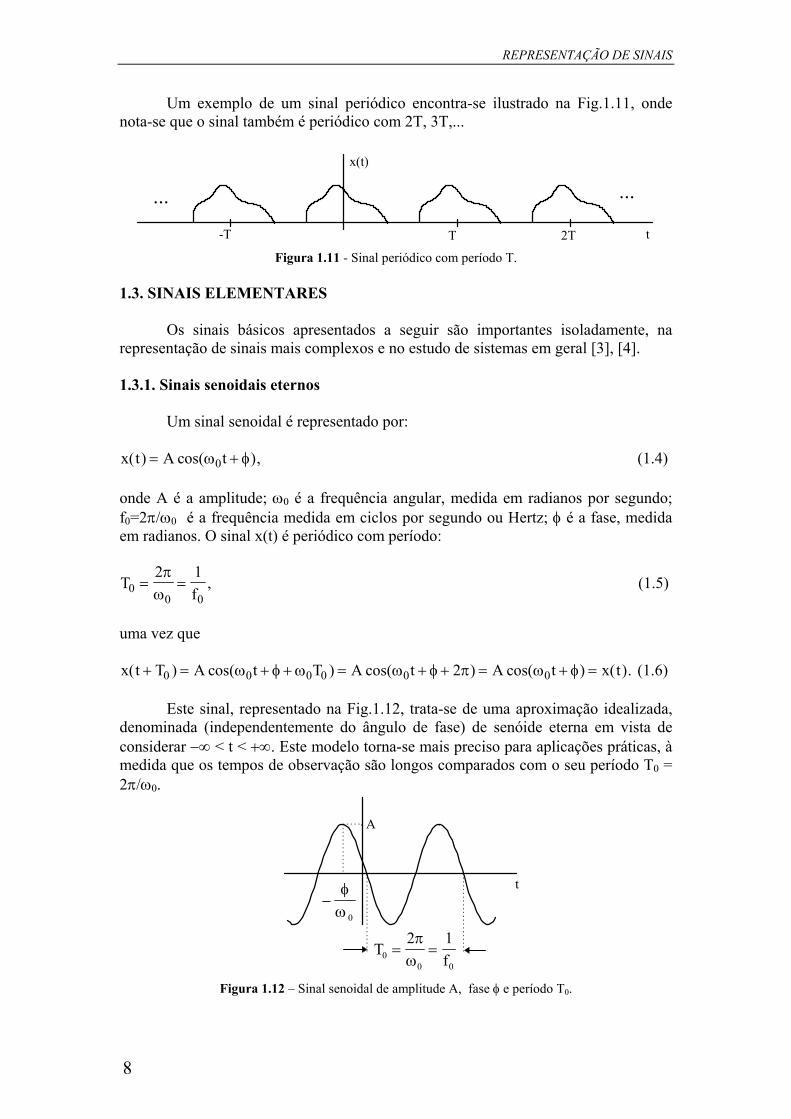
Um sinal senoidal é representado por: x t A t( ) cos( ) 0 , (1.4) onde A é a amplitude; 0 é a frequência angular, medida em radianos por segundo; f0=2/0 é a frequência medida em ciclos por segundo ou Hertz; é a fase, medida em radianos. O sinal x(t) é periódico com período:
Tf0
0 0
2 1
, (1.5)
uma vez que x t T A t T A t A t x t( ) cos( ) cos( ) cos( ) ( ) 0 0 0 0 0 02 . (1.6)
Este sinal, representado na Fig.1.12, trata-se de uma aproximação idealizada, denominada (independentemente do ângulo de fase) de senóide eterna em vista de considerar < t < . Este modelo torna-se mais preciso para aplicações práticas, à medida que os tempos de observação são longos comparados com o seu período T0 = 2/0.
t
A
Tf0
0 0
2 1
0
Figura 1.12 – Sinal senoidal de amplitude A, fase e período T0.

SINAIS E SISTEMAS
9
1.3.2. Exponencial real
A função exponencial real é definida por:
x t A e A a reaisat( ) , , . (1.7) Com a=0, tem-se x(t)=A, que é uma função constante. A função exponencial real está ilustrada na Fig.1.13. Para valores de “a” positivos, a função x(t) é crescente com o tempo, e se “a” for negativo, x(t) é uma função decrescente com t.
t
A
(a)
t
A
(b)
Figura 1.13 – Exponencial real. (a) Para a>0. (b) Para a<0.
A taxa de crescimento ou decaimento de x(t) depende da magnitude de “a”. Para a<0, quando t=0, x(0)=A. Quando t=1/|a| , x(t)=Ae-1 0.37A, ou seja, a função cai a aproximadamente 37% do valor em t=0. Esse valor t=1/|a| é chamado de constante de tempo. Quanto maior a constante de tempo (menor o valor de a), mais tempo a função leva para crescer ou decrescer, e vice-versa. 1.3.3. Exponencial complexa periódica
Os sinais descritos até agora são representados por funções reais no tempo. Uma classe importante de sinais são as exponenciais complexas periódicas:
x t e realj t( ) , 00 . (1.8)
Utilizando a fórmula de Euler:
x t e t jsin t jj t( ) cos , 00 0 1. (1.9)
Assim, aplicando-se a propriedade (1.9) quando t = 0), ocorre x(t)= ejcos(+j.sen(jOutros valores importantes da exponencial complexa estão listados na Tab.1.1
Nota-se que x(t) é um sinal complexo cuja parte real é cos 0t e a parte imaginária é sin 0t, e portanto é um sinal periódico com período T0=2/0 . Isto pode ser verificado com mais propriedade, observando-se que )]Tt(jexp[ 00
)tjexp()2jexp().tjexp()]/2t(jexp[ 0000 .

REPRESENTAÇÃO DE SINAIS
10
Tabela 1.1 – Alguns valores particulares da exponencial complexa.
Forma Exponencial (polar) Forma retangular 0je 1
2/je j je -1
2/3je -j 2je 1
Podemos representar x(t) em função do tempo num gráfico tridimensional, com eixos representando as partes real e imaginária em função do tempo, conforme mostrado na Fig.1.14:
0-1
0
1
-1
-0.5
0
0.5
1
tRe
Im
Figura 1.14 - Representação da exponencial complexa num gráfico tridimensional.
No entanto, é mais comum representar o sinal complexo num plano complexo, parametrizado pelo tempo t, conforme a Fig.1.15:
0t
-0tRe
Im
1
ejot , 0>0
ejot , 0<0
Figura 1.15 - Representação da exponencial complexa num plano.
Neste caso, a magnitude do fasor é sempre unitária, pois:
e t sin t tj t 0 20
20
1 21 cos ,
/ (1.10)
e o ângulo é dado por:
0
0
0t
sin t
t atan
cos. (1.11)

SINAIS E SISTEMAS
11
No caso de 0 ser positivo, à medida que o tempo evolui, o fasor gira no sentido anti-horário, e quando completa uma volta, 0t=2, ou t=2/0, que é o período. A partir desse instante, tudo volta a se repetir, explicitando a periodicidade do sinal.
No caso de 0 ser negativo, à medida que o tempo passa, o fasor gira no sentido horário. Como 0 é chamada de frequência angular, uma frequência negativa indicaria apenas um sentido de rotação diferente para o fasor que representa o sinal.
Da fórmula de Euler (1.9), pode-se mostrar que:
cos( )( ) ( )
0
0 0
2t
e ej t j t
(1.12)
e
sin te e
j
j t j t
( )( ) ( )
0
0 0
2
(1.13)
E ainda, pode-se representar sinais senoidais em função de exponenciais
complexas, aplicando-se os operadores real, Re{ . }, e imaginário, Im{ . }:
cos( ) Re ( ) 0
0t e j t (1.14)
e
sin t e j t( ) Im ( ) 0
0 . (1.15)
1.3.4. Exponencial complexa - caso geral
Um caso mais geral de exponencial complexa é:
x t A ea t( ) , (1.16) com A e “a” complexos: A = |A| e j , a = r + j 0.
|A| ert
, r<0
t
|A| ert
, r>0
t
Figura 1.16 – Exponenciais complexas. (a) r<0. (b) r>0.
Assim, fica-se com:
x t A e e e A e eA e t j A e sin t
j rt j t rt j t
rt rt( ) | | | |
| | cos( ) | | ( )
( )
0 0
0 0, (1.17)

REPRESENTAÇÃO DE SINAIS
12
onde nota-se que, se r<0, as partes real e imaginária de x(t) são senóides amortecidas, ou que têm amplitudes crescentes, caso r>0. Na Fig.1.16 ilustram-se essas observações.
Nota-se pelas figuras que |A|ert é a magnitude da exponencial complexa, e é chamada de envoltória. Este tipo de sinal aparece na análise de circuitos RLC e da suspensão de automóveis, por exemplo. 1.3.5. Função sinc
A função sinc é definida por:
x t sinc tsin t
t( ) ( )
( )
, (1.18)
sendo o seu gráfico mostrado na Fig.1.17.
-5 -4 -3 -2 -1 0 1 2 3 4 5-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Figura 1.17 – Função sinc(t).
Uma atenção especial deve ser dada ao cálculo de sinc(t) em t=0, o qual deve ser executado com o auxílio da regra de L’Hospital, obtendo-se sinc(0)=1 (o leitor deve verificar isto !). 1.3.6. Função pulso triangular O pulso triangular de amplitude unitária e largura , conforme desenhado na Fig.1.18, é definido através de
2/t,0
2/t,t2
1)/t(tri . (1.19)
tri(t)
t0
1
Figura 1.18 – Função pulso triangular.
SINAIS E SISTEMAS
13
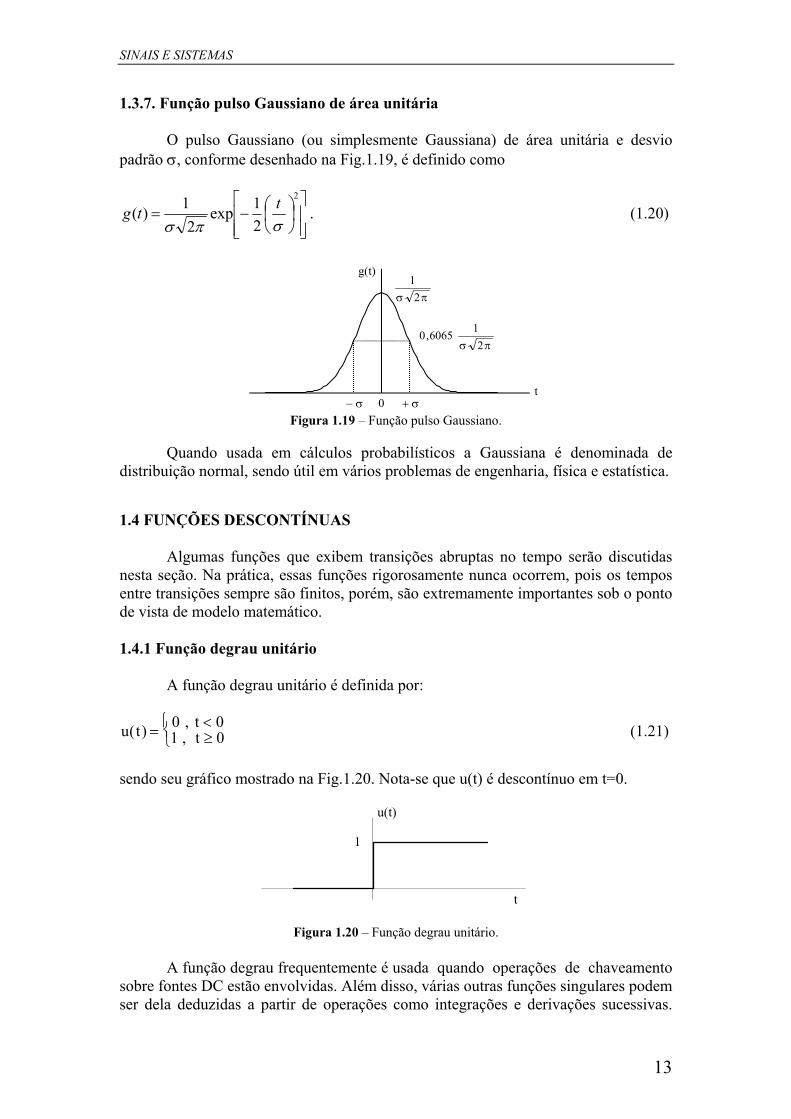
1.3.7. Função pulso Gaussiano de área unitária O pulso Gaussiano (ou simplesmente Gaussiana) de área unitária e desvio padrão , conforme desenhado na Fig.1.19, é definido como
2
2
1exp
2
1)(
t
tg . (1.20)
2
1
2
16065,0
0 t
g(t)
Figura 1.19 – Função pulso Gaussiano. Quando usada em cálculos probabilísticos a Gaussiana é denominada de distribuição normal, sendo útil em vários problemas de engenharia, física e estatística. 1.4 FUNÇÕES DESCONTÍNUAS Algumas funções que exibem transições abruptas no tempo serão discutidas nesta seção. Na prática, essas funções rigorosamente nunca ocorrem, pois os tempos entre transições sempre são finitos, porém, são extremamente importantes sob o ponto de vista de modelo matemático. 1.4.1 Função degrau unitário
A função degrau unitário é definida por:
u ttt( )
,,
0 01 0 (1.21)
sendo seu gráfico mostrado na Fig.1.20. Nota-se que u(t) é descontínuo em t=0.
u(t)
1
t
Figura 1.20 – Função degrau unitário. A função degrau frequentemente é usada quando operações de chaveamento sobre fontes DC estão envolvidas. Além disso, várias outras funções singulares podem ser dela deduzidas a partir de operações como integrações e derivações sucessivas.

REPRESENTAÇÃO DE SINAIS
14
Finalmente, é muito útil na representação de sinais práticos, que existem apenas para t0. 1.4.2. Função sinal
A função sinal fornece o sinal do argumento t, ou seja:
0t,1
0t,0
0t,1
)tsgn( (1.22)
sendo seu gráfico mostrado na Fig.1.21.
-1
1
t
sgn(t)
Figura 1.21 – Função sinal.
Conforme se observa, as funções degrau e sinal podem ser relacionadas por
1)t(u.2)tsgn( . (1.23) 1.4.3. Função porta ou pulso retangular
A função porta (ou pulso) de duração T e amplitude unitária é representada por:
T
t
T
ttx rect)( (1.24)
e encontra-se desenhada na Fig.1.22. A representação como rect(t/T) ou (t/T) depende muito da referência bibliográfica utilizada.
T/2-T/2
1
t
rect(t/T)
Figura 1.22 – Função porta de duração T.
A função porta pode ser relacionada com a função degrau através de:
)2
Tt(u)
2
Tt(u)T/t(rect . (1.25)

SINAIS E SISTEMAS
15
1.4.4. Função impulso de Dirac
Outro sinal de extrema importância é a função impulso de área unitária ou delta de Dirac, (t), relacionada com o degrau unitário por:
( )( )
td u t
dt (1.26)
e portanto,
u t dt
( ) ( ) . (1.27)
No entanto, como u(t) é descontínua em t=0, formalmente não é diferenciável
nesse ponto. Vamos interpretar a função degrau unitário como uma aproximação da função u(t), tal qual definida na Fig.1.23, para 0:
u(t)
1
t Figura 1.23 – Função u(t).
A função (t) corresponde à derivada de u(t), e é mostrada na Fig.1.24:
(t)
1/
t Figura 1.24 – Função (t).
onde nota-se que (t) tem área unitária, e é zero fora do intervalo 0 t . À medida que 0, (t) fica mais estreito e com maior amplitude, mas a área continua igual a 1. Assim, no limite: ( ) lim ( )t t
0 (1.28)
e a representação gráfica da função impulso de área unitária é dada na Fig.1.25:
t
(t)
1
Figura 1.25 – Impulso de área unitária.

REPRESENTAÇÃO DE SINAIS
16
Isto sugere que (t)=0 para todo t, exceto para t=0, onde exibe uma singularidade. O número 1 ao lado do impulso indica a área sob a função. Inclusive é mais correto se dizer que (t) é um impulso de área unitária.
Exemplo 1.1: Representar graficamente a função v(t)=A.(t-T). Solução: Trata-se de um impulso de valor A, cuja representação é mostrada na Fig.1.26.
A
Tt
v(t)
0
Figura 1.26 – Impulso de valor A aplicado no instante T.
Ressalta-se, novamente, que a frase “de valor A” não se refere à amplitude do impulso, que é infinita, mas à sua área e à amplitude do degrau cuja derivada ele representa.
Uma propriedade importante da função impulso é a seguinte: considere x(t) uma função contínua em t=0, então a integral
x t t dt x( ) ( ) ( )
0 . (1.29)
A prova é dada a seguir. Seja
I x t t dt x t t dt x t dt
( ) ( ) lim ( ) ( ) lim ( )
0 00
1.
Utilizando o teorema do valor médio:
x t dt x c b a c a ba
b
( ) ( ).( ) , ( , ) .
Logo,
),0(x
),0(,)(xlim)0()(x1
limI00
pois como x(t) é contínua em t=0, x(0-)=x(0)=x(0+). Portanto,
x t t dt x( ) ( ) ( )
0 .

SINAIS E SISTEMAS
17
Em particular, se x(t)=1, obtém-se o importante resultado
( )t dt
1 (1.30)
ou seja, (t) é uma função de área unitária.
Num caso mais geral, para um impulso em t=,
x t t dt x( ) ( ) ( )
. (1.31)
ou seja, a função x(t)(t-) tem área x(), área esta que é igual ao valor da função x(t) no instante t=. Isto é equivalente a se ter um impulso de área x(). Portanto pode-se escrever também: x t t x t( ) ( ) ( ) ( ) (1.32) A equação (1.31) corresponde à propriedade de amostragem do impulso, ou seja, quando se multiplica uma função x(t) por um impulso de área unitária num instante t=, a área sob a função resultante equivale ao valor da função x(t) no instante t=. Uma propriedade adicional do impulso refere-se à mudança de escala:
0),t(1
)t(
, (1.33)
o qual pode ser demonstrado integrando-se ambos os lados em - < t <. Se = -1, então, (-t)=(t), evidenciando que o impulso tem simetria par. 1.4.5 Sobre a existência do impulso O impulso unitário prova ser muito útil e, às vezes, essencial, na análise de sinais e sistemas. O impulso não é uma função no sentido matemático estrito [5]. Ao contrário, a integral definida de uma função que é nula em todos os pontos, exceto um, deveria ter um valor nulo. Por outro lado, x(t) será uma função de “t” se, e somente se, ela puder ser completamente descrita por uma relação ponto-a-ponto, ou seja, atribuindo-se a “x” um valor único para cada valor de “t” dentro da faixa de interesse. Assim, por exemplo, uma afirmativa de que x(t) é zero para t0, e não existe em t=0, até que definiria uma função satisfatória em todos os pontos. Embora algumas equações, inclusive integrais, possam ser usadas para definir indiretamente uma função, elas não podem conter informação que não possa ser deduzida da descrição direta, ponto-a-ponto da função. A afirmativa de que (t) tem área igual à unidade é portanto inadmissível sob o ponto de vista da matemática convencional. Observe também que as equações (1.26) e (1.27) resultam de
dt/)t(du)t( e d.)()t(ut
devido a que as funções u(t) e (t) se
REPRESENTAÇÃO DE SINAIS
18
tornam u(t) e (t), respectivamente, quando se aproxima de zero. Esta hipótese é correta, entretanto, somente se
)t(ulimdt
d
dt
)t(dulim
00
e
t
0
t
0d)].(lim[d).(lim .
Como as definições de diferenciação e integração envolvem um processo limite, o que foi feito, de fato, foi trocar a ordem de dois processos limites, o que nem sempre é justificável. Uma maneira de justificar rigorosamente os resultados dessa seção pode ser executada recorrendo-se à teoria das distribuições, a qual considera o impulso unitário como função generalizada ou distribuição, o que inclui as funções ordinárias da matemática convencional como casos particulares. Entretanto, isto está fora do escopo deste texto. 1.4.6 Impulsos no limite Embora um impulso não exista fisicamente, várias funções convencionais possuem as propriedades de (t) no limite, quando algum parâmetro tende a zero. Em particular, se a função (t) for tal que
)0(vdt).t().t(vlim0
(1.34)
então, é dito que
)t()t(lim0
. (1.35)
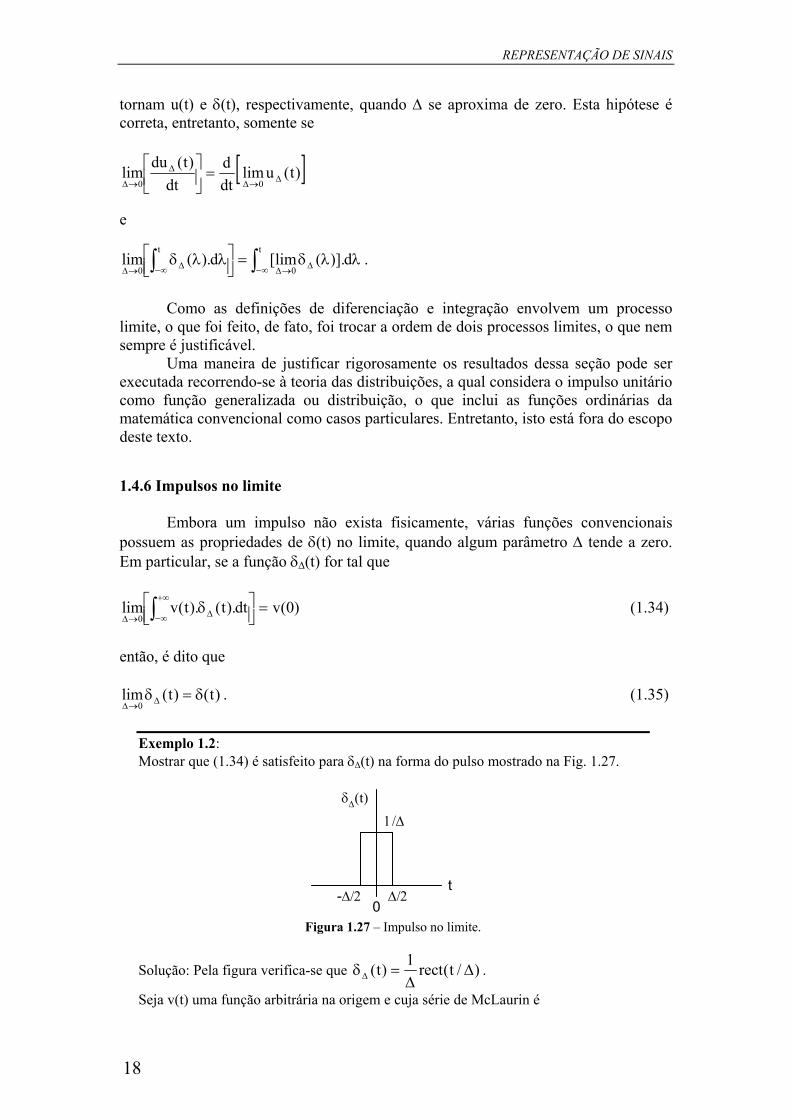
Exemplo 1.2: Mostrar que (1.34) é satisfeito para (t) na forma do pulso mostrado na Fig. 1.27.
- t
(t)
0Figura 1.27 – Impulso no limite.
Solução: Pela figura verifica-se que )/t(rect1
)t(
.
Seja v(t) uma função arbitrária na origem e cuja série de McLaurin é
SINAIS E SISTEMAS
19
...t!2
)0(vt).0(v)0(v)t(v 2
Então,
)0(v...12
.!2
)0(v0.
)0(v)0(vlim
...dtt!2
)0(vdt.t
)0(vdt
)0(vlimdt).t().t(vlim
3
0
2/
2/
22/
2/
2/
2/00
o que conclui a demonstração.
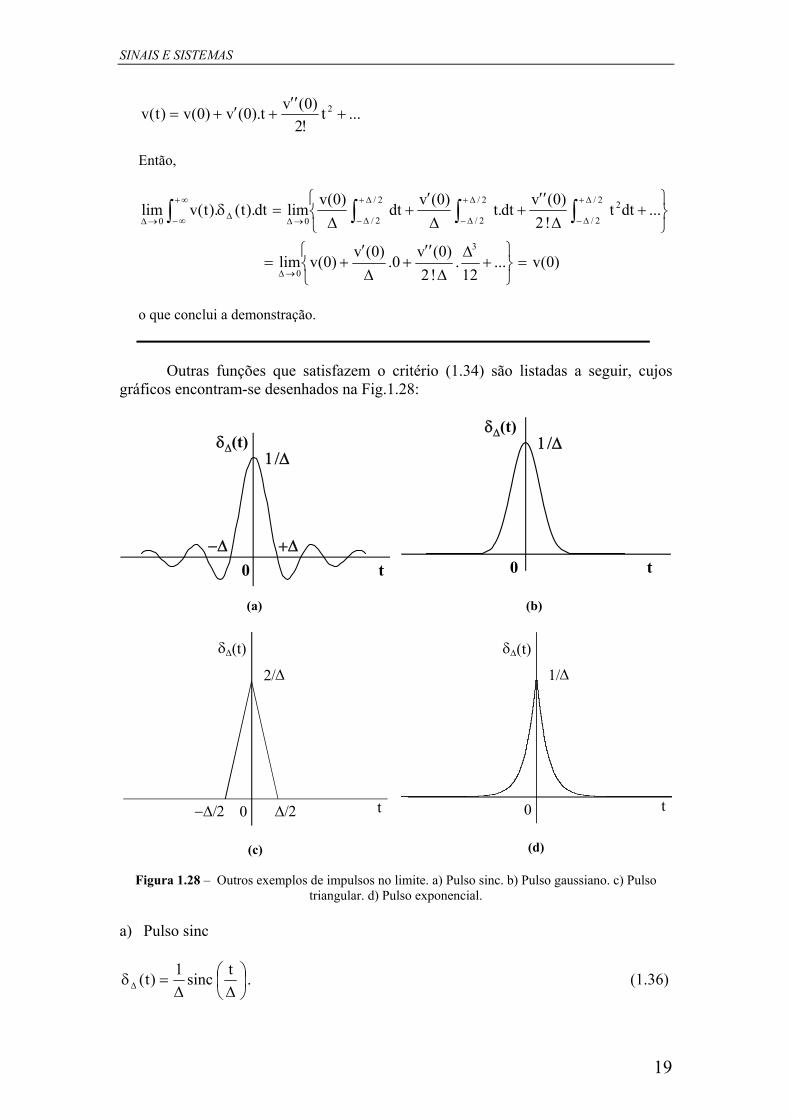
Outras funções que satisfazem o critério (1.34) são listadas a seguir, cujos
gráficos encontram-se desenhados na Fig.1.28:
0
t
(t)
0 t
(t)
(a) (b)
t
(t)
0
2/
(c)
t
(t)
0
1/
(d)
Figura 1.28 – Outros exemplos de impulsos no limite. a) Pulso sinc. b) Pulso gaussiano. c) Pulso
triangular. d) Pulso exponencial. a) Pulso sinc
t
sinc1
)t( . (1.36)

REPRESENTAÇÃO DE SINAIS
20
b) Pulso Gaussiano
2t
exp1
)t( . (1.37)
c) Pulso triangular
t
tri2
)t( . (1.38)
d) Pulso exponencial
texp
2
1)t( . (1.39)
2.5 CONVOLUÇÃO DE SINAIS
A convolução entre dois sinais x1(t) e x2(t) é definida pela integral
d)t(x)(x)t(x)t(x 2121 . (1.40)
A integral de convolução é executada em relação à variável muda , sendo t considerada como constante. O resultado da convolução sempre resulta numa função temporal, por isso, em certos livros utiliza-se a notação simplificada x1(t)*x2(t) = x1*x2(t) para indicar que a função resultante x1*x2 depende de t [3]. Considere as funções x1(t), x2(t) e x3(t). A partir da definição (1.40), podem ser demonstradas as seguintes propriedades: a) Propriedade comutativa
d)t(x)(x)t(x*)t(x)t(x*)t(x 121221 . (1.41)
b) Propriedade associativa
321321 x*)x*x()x*x(*x . (1.42)
c) Propriedade distributiva
)x*x()x*x()xx(*x 3121321 . (1.43)
d) Derivada do produto
212
121 x*dt
dx
dt
dx*x)x*x(
dt
d . (1.44)
SINAIS E SISTEMAS
21
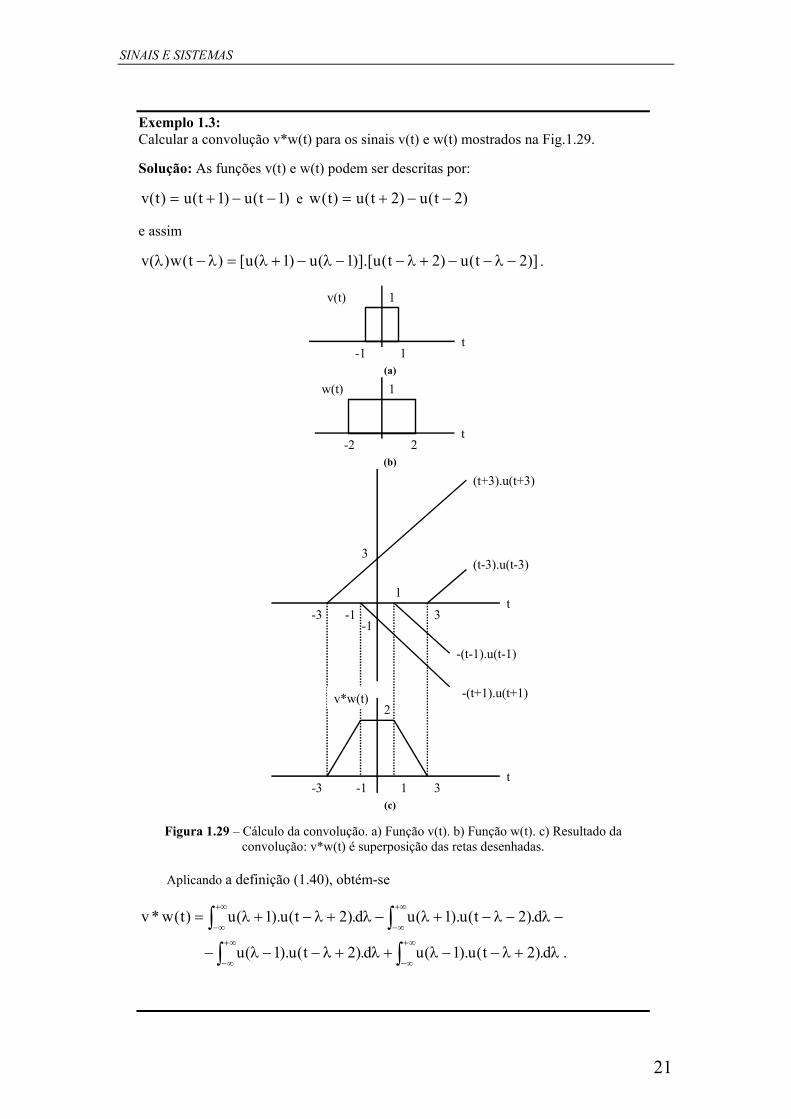
Exemplo 1.3: Calcular a convolução v*w(t) para os sinais v(t) e w(t) mostrados na Fig.1.29.
Solução: As funções v(t) e w(t) podem ser descritas por:
)1t(u)1t(u)t(v e )2t(u)2t(u)t(w
e assim
)]2t(u)2t(u)].[1(u)1(u[)t(w)(v .
-1 1t
1v(t)
(a)
1
t2-2
w(t)
(b)
1
3-3 -1t
(t+3).u(t+3)
(t-3).u(t-3)
-(t-1).u(t-1)
-(t+1).u(t+1)
3-3 -1 1t
3
-1
v*w(t)2
(c)
Figura 1.29 – Cálculo da convolução. a) Função v(t). b) Função w(t). c) Resultado da convolução: v*w(t) é superposição das retas desenhadas.
Aplicando a definição (1.40), obtém-se
.d.)2t(u).1(ud.)2t(u).1(u
d.)2t(u).1(ud.)2t(u).1(u)t(w*v

REPRESENTAÇÃO DE SINAIS
22
Como
1,1
1,0)1(u e
1,1
1,0)1(u , então
d.)2t(u
d.)2t(ud.)2t(ud.)2t(u)t(w*v
1
111
Também
2t,1
2t,0)2t(u e
2t,1
2t,0)2t(u , e então
3tdd).2t(u2t
11
desde que t+2>-1, i.e., t >-3,
3tdd).2t(u2t
11
desde que t-2>1, i.e., t >1,
3tdd).2t(u2t
11
desde que t+2>1, i.e., t >-1 e
3tdd).2t(u2t
11
desde que t-2>1, i.e., t >3.
Portanto, a expressão final da convolução é
)3t(u).3t()1t(u).1t()1t(u).1t()3t(u).3t()t(w*v
e cujo gráfico está desenhado na Fig.1.29 c).
Conforme se observa pelo exemplo anterior, o gráfico da convolução v*w(t) tem largura final igual à soma das larguras das funções individuais v(t) e w(t). Este resultado também se aplica para funções v(t) e w(t) arbitrárias, indicando que a operação de convolução implica num alargamento temporal. Além disso, a função resultante torna-se mais “suave” que as funções individuais [6].
Embora esta operação possa ser executada analiticamente (em alguns poucos casos e com certa dificuldade) ou numericamente, torna-se interessante discutir o processo de determinação gráfica, o qual pode simplificar sensivelmente os cálculos.
Exemplo 1.4: Convolução gráfica Executar a convolução dos sinais x(t) e y(t) mostrados na Fig.1.30:
-3 -2 -1 1 2 3 4 t
2
1
x(t)
-3 -2 -1 1 2 3 4 t
2
1
y(t)
Figura 1.30 – Sinais x(t) e y(t).
SINAIS E SISTEMAS
23
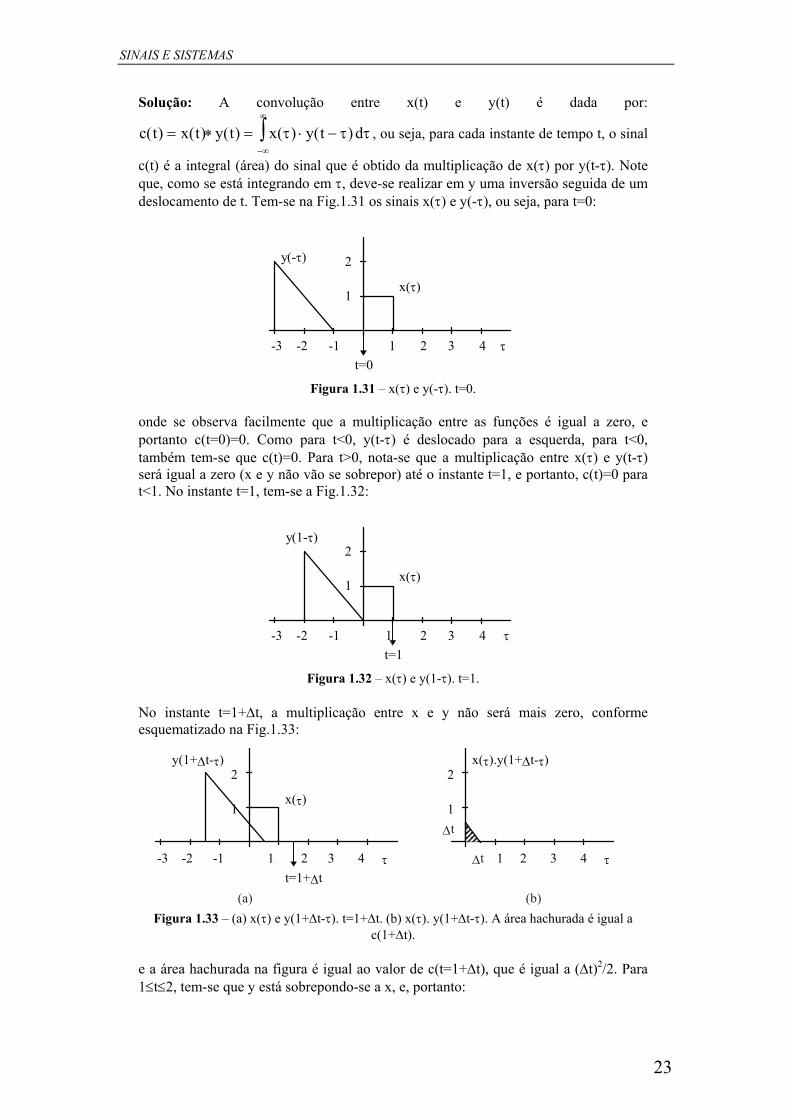
Solução: A convolução entre x(t) e y(t) é dada por:
c t x t y t x y t d( ) ( ) ( ) ( ) ( )
, ou seja, para cada instante de tempo t, o sinal
c(t) é a integral (área) do sinal que é obtido da multiplicação de x() por y(t-). Note que, como se está integrando em , deve-se realizar em y uma inversão seguida de um deslocamento de t. Tem-se na Fig.1.31 os sinais x() e y(-), ou seja, para t=0:
-3 -2 -1 1 2 3 4
2
1
y(-)
x()
t=0
Figura 1.31 – x() e y(-). t=0. onde se observa facilmente que a multiplicação entre as funções é igual a zero, e portanto c(t=0)=0. Como para t<0, y(t-) é deslocado para a esquerda, para t<0, também tem-se que c(t)=0. Para t>0, nota-se que a multiplicação entre x() e y(t-) será igual a zero (x e y não vão se sobrepor) até o instante t=1, e portanto, c(t)=0 para t<1. No instante t=1, tem-se a Fig.1.32:
-3 -2 -1 1 2 3 4
2
1
y(1-)
x()
t=1
Figura 1.32 – x() e y(1-). t=1. No instante t=1+t, a multiplicação entre x e y não será mais zero, conforme esquematizado na Fig.1.33:
-3 -2 -1 1 2 3 4
2
1
y(1+t-)
x()
t=1+t
1 2 3 4
2
1
x().y(1+t-)
t
t
(a) (b) Figura 1.33 – (a) x() e y(1+t-). t=1+t. (b) x(). y(1+t-). A área hachurada é igual a
c(1+t). e a área hachurada na figura é igual ao valor de c(t=1+t), que é igual a (t)2/2. Para 1t2, tem-se que y está sobrepondo-se a x, e, portanto:
REPRESENTAÇÃO DE SINAIS
24
c t tt
t( ) , 12
0 12
ou, na variável t:
c tt
t( )( )
,
1
21 2
2
.
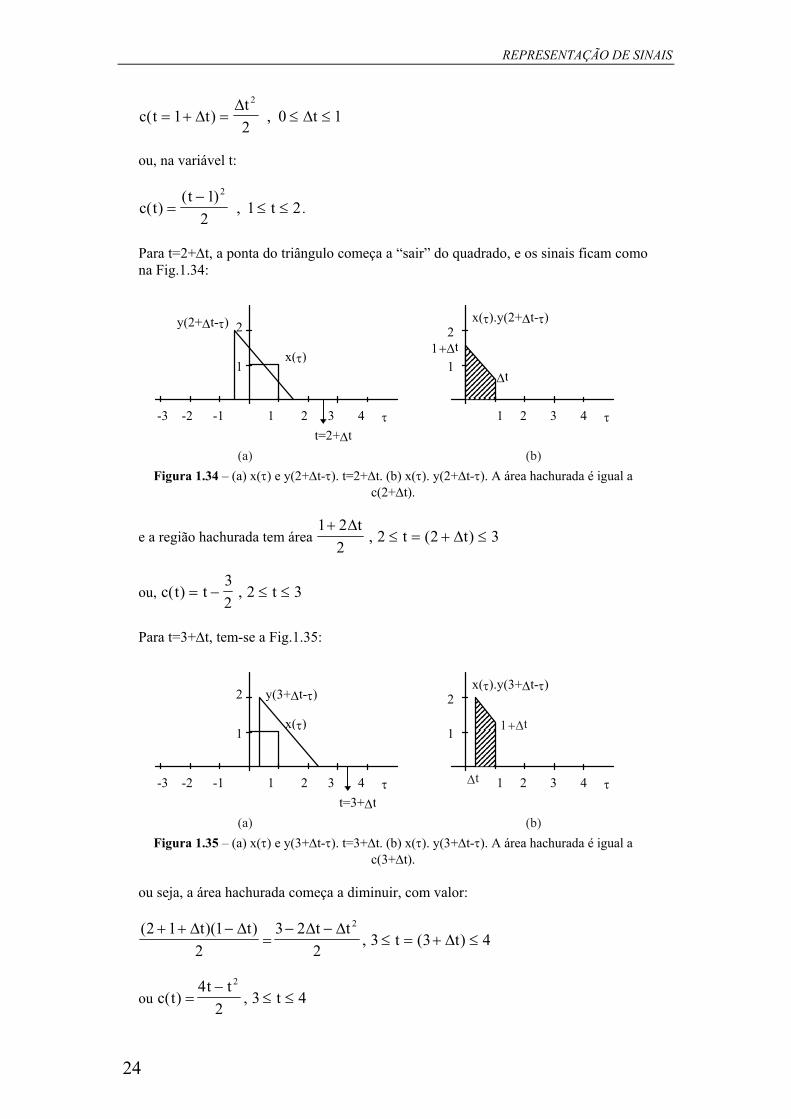
Para t=2+t, a ponta do triângulo começa a “sair” do quadrado, e os sinais ficam como na Fig.1.34:
-3 -2 -1 1 2 3 4
2
1
y(2+t-)
x()
t=2+t
1 2 3 4
2
1
x().y(2+t-)
t
t
(a) (b) Figura 1.34 – (a) x() e y(2+t-). t=2+t. (b) x(). y(2+t-). A área hachurada é igual a
c(2+t).
e a região hachurada tem área 1 2
22 2 3
tt t, ( )
ou, c t t t( ) , 3
22 3
Para t=3+t, tem-se a Fig.1.35:
-3 -2 -1 1 2 3 4
2
1
y(3+t-)
x()
t=3+t
1 2 3 4
2
1
x().y(3+t-)
t
t
(a) (b) Figura 1.35 – (a) x() e y(3+t-). t=3+t. (b) x(). y(3+t-). A área hachurada é igual a
c(3+t). ou seja, a área hachurada começa a diminuir, com valor: ( )( )
, ( )2 1 1
2
3 2
23 3 4
2
t t t tt t
ou c tt t
t( ) ,
4
23 4
2
SINAIS E SISTEMAS
25
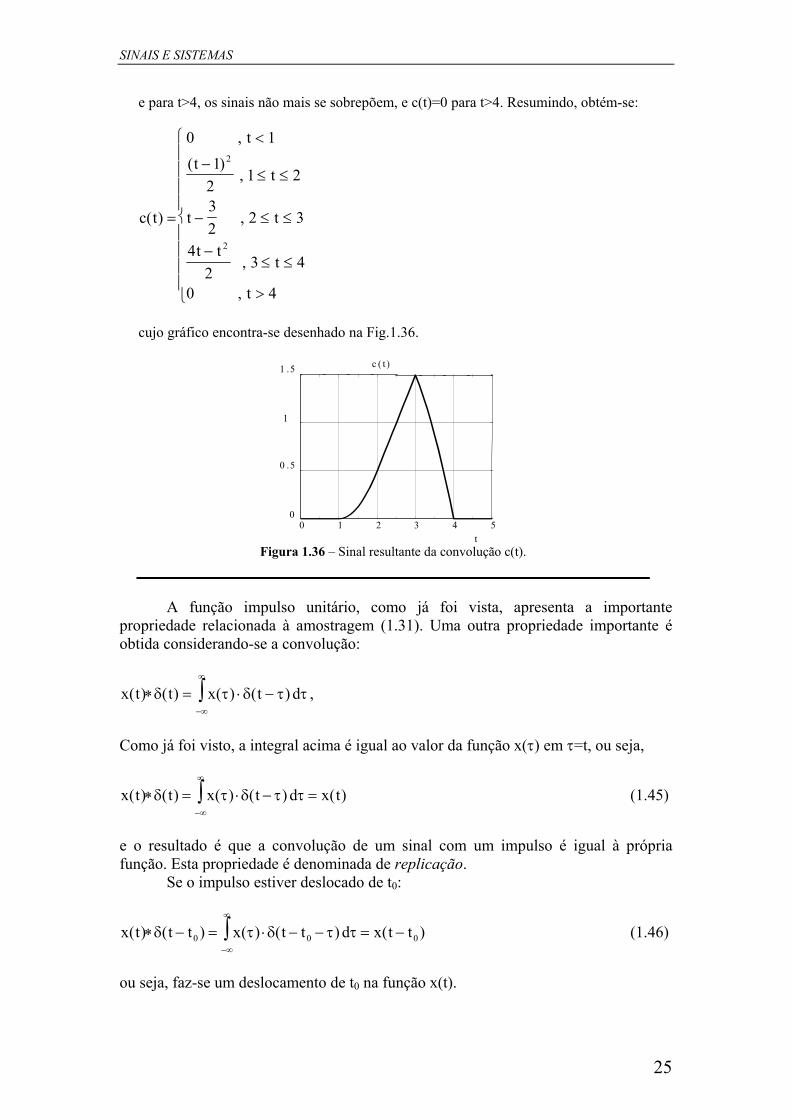
e para t>4, os sinais não mais se sobrepõem, e c(t)=0 para t>4. Resumindo, obtém-se:
c t
t
tt
t t
t tt
t
( )
,
( ),
,
,
,
0 1
1
21 2
3
22 3
4
23 4
0 4
2
2
cujo gráfico encontra-se desenhado na Fig.1.36.
0 1 2 3 4 50
0 .5
1
1 .5
t
c ( t )
Figura 1.36 – Sinal resultante da convolução c(t).
A função impulso unitário, como já foi vista, apresenta a importante
propriedade relacionada à amostragem (1.31). Uma outra propriedade importante é obtida considerando-se a convolução:
x t t x t d( ) ( ) ( ) ( )
,
Como já foi visto, a integral acima é igual ao valor da função x() em =t, ou seja,
x t t x t d x t( ) ( ) ( ) ( ) ( )
(1.45)
e o resultado é que a convolução de um sinal com um impulso é igual à própria função. Esta propriedade é denominada de replicação.
Se o impulso estiver deslocado de t0:
x t t t x t t d x t t( ) ( ) ( ) ( ) ( )
0 0 0 (1.46)
ou seja, faz-se um deslocamento de t0 na função x(t).

REPRESENTAÇÃO DE SINAIS
26
Exemplo 1.5: a) Esboçar o gráfico da função trem de impulsos definida por
n
T )nTt()]t([rep , para n inteiro
b) Esboçar o gráfico de )]t([rep*)t(v)]t(v[rep TT , onde )/t(rect.A)t(v ,
para <T. Solução: a) O gráfico de repT[(t)] encontra-se desenhado na Fig. 1.37 a) b) Usando-se a propriedade de replicação, obtém-se
n
n
nT
)nTt(v
)nTt(*)t(v
)nTt(*)t(v)]t(v[rep
cujo gráfico encontra-se desenhado na Fig.1.37 b).
......
0 T 2T-T-2T
repT(t)
t
(a)
......
0 T 2T-T-2T
v(t)
t
A
(b)
Figura 1.37 – Trem de funções. a) Trem de impulsos. b) Trem de pulsos.
1.6 SINAIS DE ENERGIA E SINAIS DE POTÊNCIA
Em sistemas elétricos, geralmente se trabalha com correntes e tensões. Se uma tensão v(t) é aplicada num resistor de 1, a corrente que passa por ele é i(t)=v(t) e a potência dissipada é igual a p(t)=v(t).i(t)=v2(t). Assim, a energia fornecida pelo sinal v(t) num intervalo de tempo [t1, t2] é:
Energia = v t dtt
t2
1
2
( ) .

SINAIS E SISTEMAS
27
De maneira similar, se uma corrente i(t) passa por um resistor de 1, a tensão sobre ele é v(t)=i(t), e a potência dissipada igual a p(t)=v(t).i(t)=i2(t). Assim, a energia fornecida pelo sinal i(t) num intervalo de tempo [t1, t2] é:
Energia = i t dtt
t2
1
2
( ) .
1.6.1 Sinais de energia
Estendendo-se a discussão para um sinal x(t) real ou complexo, sua energia (Ex) no intervalo [t1, t2] é definida como:
Ex = x t x t dt x t dtt
t
t
t
( ). ( ) | ( )| 1
2
1
22 (1.47)
onde, se x(t) for real, x(t).x*(t)=x2(t).
Um sinal é chamado de sinal de energia, se tem energia finita (E) no intervalo (-, ):
E x t dt
| ( )|2 . (1.48)
Exemplo 1.6: Avaliar se o sinal v(t)= e-2|t| é um sinal de energia Solução: Valos avaliar a integral
e dt e dt et t t
2 2 4
0
40
22
4
1
2| |
e portanto, v(t) é um sinal de energia.
Antes de prosseguir, vamos lembrar que uma função x(t) é estritamente
limitada no tempo se tem valores não-nulos somente num intervalo de tempo [t1, t2], sendo nula para t<t1 e t>t2. As funções porta e pulso triangular são exemplos de funções estritamente limitadas no tempo. Já uma função x(t) é dita assintoticamente limitada no tempo se x(t)0 quando t. Esses dois tipos de funções são de duração finita. Como contra-exemplo, cita-se a senóide eterna que, como o próprio nome especifica, não tem duração finita. Por outro lado, um sinal é limitado se existe um valor M tal que | x(t) |<M para todo t. A função degrau, por exemplo, é limitada pois u(t)<M, para qualquer M>1, e para todo t. Por outro lado, o delta de Dirac e a função exponencial real não são limitadas.
Assim, pode-se afirmar que se um sinal for limitado e de duração finita ele será um sinal de energia, pois

REPRESENTAÇÃO DE SINAIS
28
| ( )| | ( )| ( )x t dt x t dt M dt M t tt
t
t
t2 2 2 2
2 1
1
2
1
2
.
A maioria dos sinais encontrados na prática são limitados e de duração finita, e portanto são sinais de energia. 1.6.2 Sinais de potência
A potência média (Pm) de um sinal x(t) num intervalo [t1, t2] é definida como
Pt t
x t dtmt
t
1
2 1
2
1
2
| ( )| . (1.49)
Um sinal é chamado de sinal de potência se a potência média definida por
PT
x t dt x tT
T
T
lim | ( )| ( )1
22 2
(1.50)
for diferente de zero e finita.
Definindo-se então:
E x t dtTT
T
| ( )|2 , (1.51)
observa-se que E E
TT
lim (1.52)
para sinais de energia, e
PT
ET
T
lim1
2 . (1.53)
para sinais de potência. Para um sinal de energia, a energia total é finita, e portanto P=0.
A energia total de um sinal de potência deve ser infinita, pois senão a potência seria nula. Logo, um sinal pode ser um sinal de potência ou um sinal de energia, mas não ambos simultaneamente. No entanto, um sinal pode não ser um sinal de energia nem de potência.
Exemplo 1.7: Considere o sinal v(t)=e-2t . Verificar se v(t) é um sinal de energia ou de potência. Solução: A energia do sinal é:

SINAIS E SISTEMAS
29
E e dt e dt e eTt
T
T
t
T
T
T T
2 2 4 4 421
4( )
e para T, ET. A potência média do sinal é:
PT
Ee e
T
e
T
eT
TT
T
T T
T
T
T
T
lim lim lim lim
1
2 8 8
4
8
4 4 4 4
e portanto e-2t não é um sinal de energia nem de potência.
Para sinais periódicos, com período T0 , o cálculo da potência média pode ser simplificado:
P PT
x t dtT
x t dtT
x t dtmT T
T
T
T T
lim | ( )| | ( )| | ( )|/
/1
2
1 12
0
2
2
2
0
2
00
0 0
(1.54)
Se o sinal periódico x(t) for limitado, então ele é um sinal de potência.
Exemplo 1.8: Considere o sinal senoidal x(t)=A cos(0t + ). Calcular sua potência média. Solução: Aplicando-se (1.53)
2
A
T16
)2T2(sinA)2T2(sinA
2
Alim
4
)2T2(sin)2T2(sinT2
T4
Alim
dt2
)t(2cos
2
1
T2
Alimdt)t(cosA
T2
1limP
2
0
02
022
T
0
002
T
T
T
02
T
T
T
022
T
Pode ser verificado que, integrando num período, chega-se no mesmo resultado.
Um sinal de frequência modulada, FM, com sinal modulante senoidal de amplitude Am e frequência m , é representado por ]tsenAtcos[.A)t(v mmpp
= ]tsenAcos[.tcosA mmpp ]tsenAsen[.tsen mmp , onde Ap e p são as
amplitude e frequência da portadora [3]. Este sinal envolve termos do tipo cos[cos(x)] e sen[sen(x)], os quais podem ser adequadamente expandidos em série de funções de Bessel. Devido à importância desse tipo de função, tal tópico será analisado na próxima seção.

REPRESENTAÇÃO DE SINAIS
30
1.7. FUNÇÕES DE BESSEL DE PRIMEIRA ESPÉCIE
Existe uma classe de funções da física matemática, denominada de funções especiais, que se prestam a descrever soluções para equações diferenciais específicas como, por exemplo, a equação diferencial de Bessel [7]. São soluções dessa equação as funções de Bessel de primeira espécie, de segunda espécie (ou funções de Neumann) e de terceira espécie (ou funções de Hankel). Outros exemplos de funções especiais são a função gama, a função beta, a função erro, os polinômios de Legendre, os polinômios de Hermite, os polinômios de Jacobi, os polinômios de Gegenbauer, etc. Neste texto nos limitaremos a estudar as funções de Bessel de primeira espécie, devido à sua importância na teoria de comunicações. A função de Bessel de primeira espécie e ordem n pode ser definida através da série de potências
0k
k2nk
n )1kn(!k
)2/x()1()x(J (1.55)
onde (n) é a função gama. Se n for inteiro, então, (n+1)=n!, e assim,
...)4n2)(2n2(4.2
x
)2n2(2
x1
!n2
x)x(J
42
n
n
n . (1.56)
Na Fig. 1.38 são ilustradas as 4 primeiras funções de Bessel, evidenciando o comportamento oscilatório e decrescente à medida que o argumento x aumenta.
Figura 1.38 - Funções de Bessel de primeira espécie.
A partir de (1.55) pode-se mostrar que, se n for inteiro, então
)x(J)1()x(J nn
n . (1.57) Além disso, com o auxílio de séries de potências, pode-se mostrar que a função geratriz para Jn(x), onde n é inteiro, é

SINAIS E SISTEMAS
31
n
nn
t
1t
2
x
t)x(Je . (1.58)
A partir de (1.58) é possível demonstrar as seguintes relações de recorrência:
a) )x(J)x(Jx
n2)x(J 1nn1n (1.59a)
b) )]x(J)x(J[2
1
dx
)x(dJ1n1n
n (1.59b)
c) )x(Jx)]x(Jx[dx
d1n
nn
n (1.59c)
d) )x(Jx)]x(Jx[dx
d1n
nn
n
(1.59c)
Exemplo 1.9: A partir da função geratriz mostrar que a) ...2cos).x(J2)x(J)senxcos( 20
b) ...3cos).x(J2sen).x(J2)senxsen( 31
Solução: Basta fazer jet em (1.58)
...}3sen)]x(J)x(J[sen)]x(J)x(J{[j
...}2cos)]x(J)x(J[)]x(J)x(J[)x(J{
]nsenjn[cos)x(Je)x(Je)]ee(x2
1exp[
2211
22110
nn
n
jnn
senjxjj
a partir da qual mostra-se o desejado.
A partir desse exemplo, podem ser extraídas as importantes relações:
...2cos).x(J2)x(J)senxcos( 20 (1.60a)
...3cos).x(J2sen).x(J2)senxsen( 31 (1.60b)
n
jnn
senjx e)x(Je (1.60c)
usadas com grande frequência na teoria de comunicações.
Exemplo 1.10:
Mostrar a seguinte relação integral:
0n )nsenxcos(
1)x(J
Solução: Vamos lembrar que
REPRESENTAÇÃO DE SINAIS
32
nm,2/
nm,0dncos.mcos
0
nm,2/
nm,0dnsen.msen
0
Assim, multiplicando-se a expressão (1.60a) por cos(n) e a expressão (1.60b) por sen(n), e integrando-se entre 0 e , obtém-se (mostrar isto !)
ímparn,0
zeroouparn),x(Jdncos.)senxcos( n
0
ímparn),x(J
zeroouparn,0dnsen.)senxsen(
n0
Executando-se a soma no caso onde n é zero ou par, obtém-se
d.)]nsenx[cos(1
d.]nsen).senxsen(ncos).senx[cos(1
)x(J
0
0n
A mesma relação se mantém quando n é ímpar, ou seja, é válida para qualquer n inteiro.
Vamos observar que, para )nsenxsen()(f , então, f(-) = - f(), ou
seja, é uma função ímpar. Portanto, sua integral no intervalo deve ser nula. Assim, utilizando-se o exemplo anterior, conclui-se que
de2
1)x(J )nsenx(j
n (1.61)
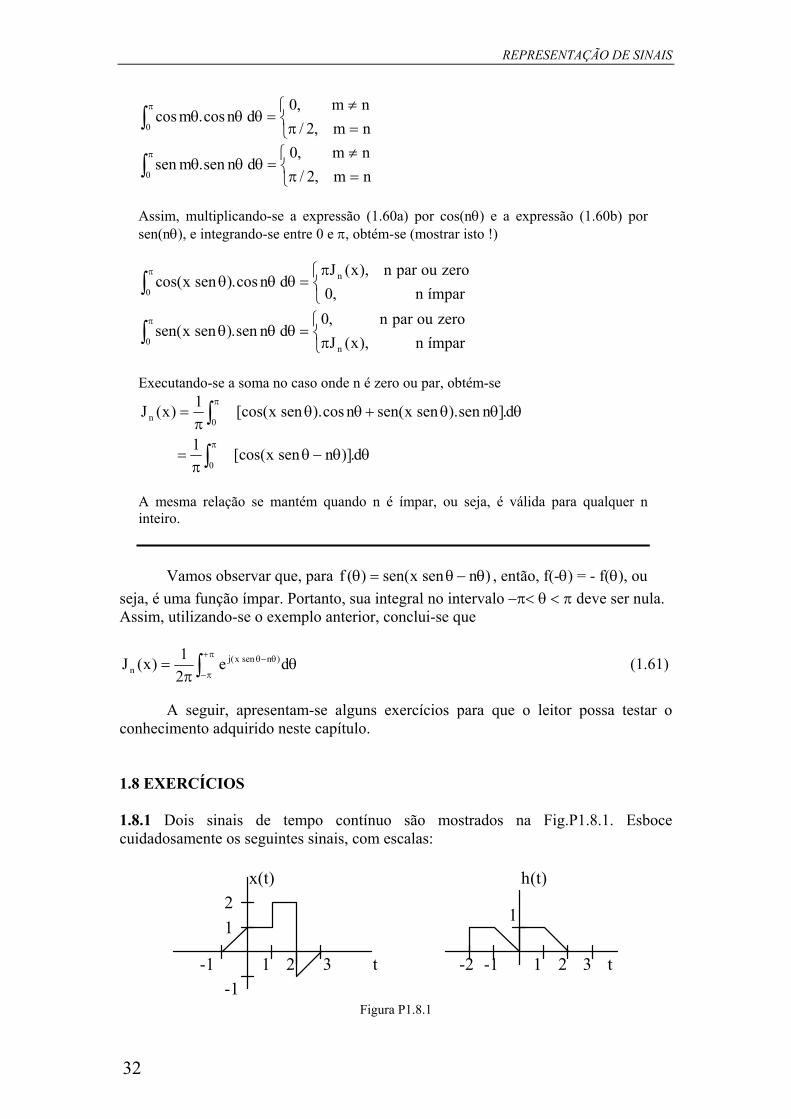
A seguir, apresentam-se alguns exercícios para que o leitor possa testar o conhecimento adquirido neste capítulo. 1.8 EXERCÍCIOS 1.8.1 Dois sinais de tempo contínuo são mostrados na Fig.P1.8.1. Esboce cuidadosamente os seguintes sinais, com escalas:
x(t)
t t
h(t)
2
1
-1
-1 1 2 3 1 2 3-1-2
1
Figura P1.8.1

SINAIS E SISTEMAS
33
i) x t( ) 2 ii) x t( )1 iii) x t( )2 2 iv) x t( / )2 3
v) x t x t u t( ) ( ) ( ) 2 1
vi) x t t t( ) ( / ) ( / ) 3 2 3 2 vii) x t h t( ) ( ) 1 viii) x t h t( ) ( ) 1 1 ix) x t h t( / ) ( )2 2 4 x) x te ( ) (parte par) xi) x to ( ) (parte ímpar) 1.8.2 A soma de duas ou mais senóides pode ou não ser periódica dependendo da relação entre as frequências. Considere a soma de duas senóides com frequências f1 e f2 . Para a soma ser periódica, f1 e f2 devem ser comensuráveis, i.e., deve existir um número f0 contido um número inteiro de vezes em f1 e f2. Se f0 é esse número, então: f1=n1f0 e f2=n2f0 onde n1 e n2 são inteiros, e f0 é a frequência fundamental. Para os sinais abaixo, determine quais são periódicos e o período, quando aplicável. a) x t t sin t( ) cos( ) (5 ) 2 2 3 b) x t t t( ) cos(5 ) cos( ) 5 15 c) x t sin t sin t( ) ( ) ( ) 3 10 12 d) x t t t sin t( ) cos( ) cos( ) ( ) 4 2 3 4 5 26
1.8.3 Mostre que: ( ) ( )21
2t t
Sugestão: Examine a função ( )2t
1.8.4 Considere-se a função )T/t(rect.2
1
T
t.A)t(f
, para A e T constantes.
a) Esboçar o gráfico de f(t). b) Obter analiticamente o resultado de f(t)*repT[(t)]. c) Esboçar o gráfico de f(t)*repT[(t)]. Qual o nome usual dessa função ? 1.8.5 Calcular o valor das seguintes integrais definidas
a)
dt).1t).(t( 2 d)
2
1
2 dt).1t).(1t(
b)
1
1
2 dt).1t).(t( e) 5
3
3 dt).2t4t).(1t(
c) 5
3
2 dt).1t).(t( f)
dt).2t).(t1( 4
REPRESENTAÇÃO DE SINAIS
34
1.8.6 Mostre que x t u t x t dtt
( ) ( ) ( )
1.8.7 Executar a convolução, graficamente, das funções )t(ue.A)t(v t e
)]Tt(u)t(u[T
t)t(w .
Sugestão: Consultar o livro do Carlson [3].
SINAIS E SISTEMAS
35
CAPÍTULO 2: ANÁLISE DE SINAIS PERIÓDICOS : SÉRIE DE FOURIER
Um dos principais objetivos de se analisar sinais é o de determinar o conteúdo de frequência ou a faixa de frequência de sinais. Isto é de extrema importância em diversos campos de aplicação. Em comunicações, sinais transmitidos por estações AM são limitados na faixa de 535 kHz a 1650 kHz [3], [4]. Sinais de estações FM ocupam a faixa de frequência entre 88 MHz a 108 MHz, as de televisão UHF ocupam faixas entre 470 MHz e 890 MHz, e assim por diante, para os demais tipos de serviços. Um sinal de voz típico ocupa uma faixa de 200 Hz a 4 kHz. Através da análise de sinais é possível entender como um sinal de voz ou de música é transmitido em outra faixa de frequência (através de modulação).
Na área médica, por exemplo, a análise de um sinal resultante de um exame de eletrocardiograma (ECG) ou eletroencefalograma (EEG) pode indicar se o paciente possui alguma anomalia cardíaca ou na atividade elétrica cerebral. Um submarino emite um sinal acústico próprio dependendo da rotação dos propulsores e vibração dos motores. Este sinal pode ser utilizado em detecção submarina. Abelhas africanizadas (ou "assassinas") e domésticas são quase idênticas em tamanho e aparência, e uma das maneiras de diferenciá-las é com a ajuda de um microscópio. No entanto, descobriu-se que elas batem as asas em frequências diferentes, e, consequentemente, geram sinais diferentes. Estes sinais, detectados, podem ser utilizados para identificar as abelhas assassinas e controlar sua disseminação. Uma outra aplicação importante de análise de sinais é a eliminação de certos tipos de ruídos como o de máquinas, transformadores de potência, ventiladores industriais, etc. Estes tipos de equipamentos geram sinais periódicos, que podem ser decompostos em vários sinais. Um microfone pode captar esse ruído e um sistema computadorizado analisar este sinal e gerar um outro sinal que é a imagem do ruído (um anti-ruído). Isto cancela o ruído, não afetando a conversa normal entre as pessoas que estejam no ambiente, por exemplo, dentro de um avião. Neste capítulo aborda-se a primeira parte da análise dos sinais de tempo contínuo, enfatizando-se os sinais periódicos, através da série de Fourier. No Capítulo 3, serão analisados em detalhes os sinais aperiódicos, com o auxílio da transformada de Fourier. Antes, porém, pretende-se discutir alguns conceitos preliminares sobre espectros de linhas, produto vetorial e similaridades entre sinais variáveis no tempo. 2.1 FASORES GIRANTES Considere, inicialmente, o problema do regime permanente senoidal, tal qual estudado na teoria de circuitos elétricos. Nesse caso, os sinais são constituídos por senóides eternas e têm representação temporal como ilustrado na Fig.2.1, e conforme discutido na Capítulo 1. Assim, se x(t) for um sinal senoidal, então
)tcos(.A)t(x 0 (2.1)
ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
36
onde A é o valor de pico ou amplitude, 0 é a frequência angular e é o ângulo de fase.
A
-A
x(t)
0-/0
A cos
t
T=20
... ...
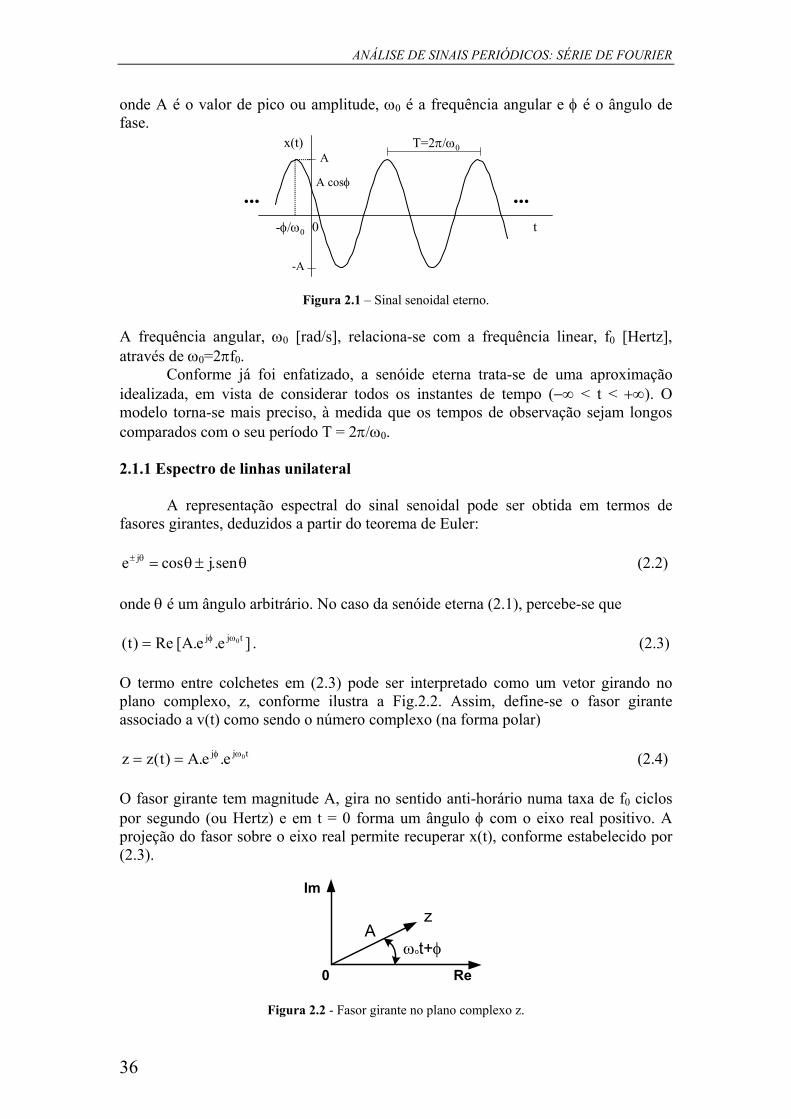
Figura 2.1 – Sinal senoidal eterno.
A frequência angular, 0 [rad/s], relaciona-se com a frequência linear, f0 [Hertz], através de 0=2f0. Conforme já foi enfatizado, a senóide eterna trata-se de uma aproximação idealizada, em vista de considerar todos os instantes de tempo ( < t < ). O modelo torna-se mais preciso, à medida que os tempos de observação sejam longos comparados com o seu período T = 2/0. 2.1.1 Espectro de linhas unilateral
A representação espectral do sinal senoidal pode ser obtida em termos de fasores girantes, deduzidos a partir do teorema de Euler:
sen.jcose j (2.2) onde é um ângulo arbitrário. No caso da senóide eterna (2.1), percebe-se que
]e.e.A[Re)t( tjj 0 . (2.3) O termo entre colchetes em (2.3) pode ser interpretado como um vetor girando no plano complexo, z, conforme ilustra a Fig.2.2. Assim, define-se o fasor girante associado a v(t) como sendo o número complexo (na forma polar)
tjj 0e.e.A)t(zz (2.4) O fasor girante tem magnitude A, gira no sentido anti-horário numa taxa de f0 ciclos por segundo (ou Hertz) e em t = 0 forma um ângulo com o eixo real positivo. A projeção do fasor sobre o eixo real permite recuperar x(t), conforme estabelecido por (2.3).
Az
ot+
Re
Im
0
Figura 2.2 - Fasor girante no plano complexo z.
SINAIS E SISTEMAS
37
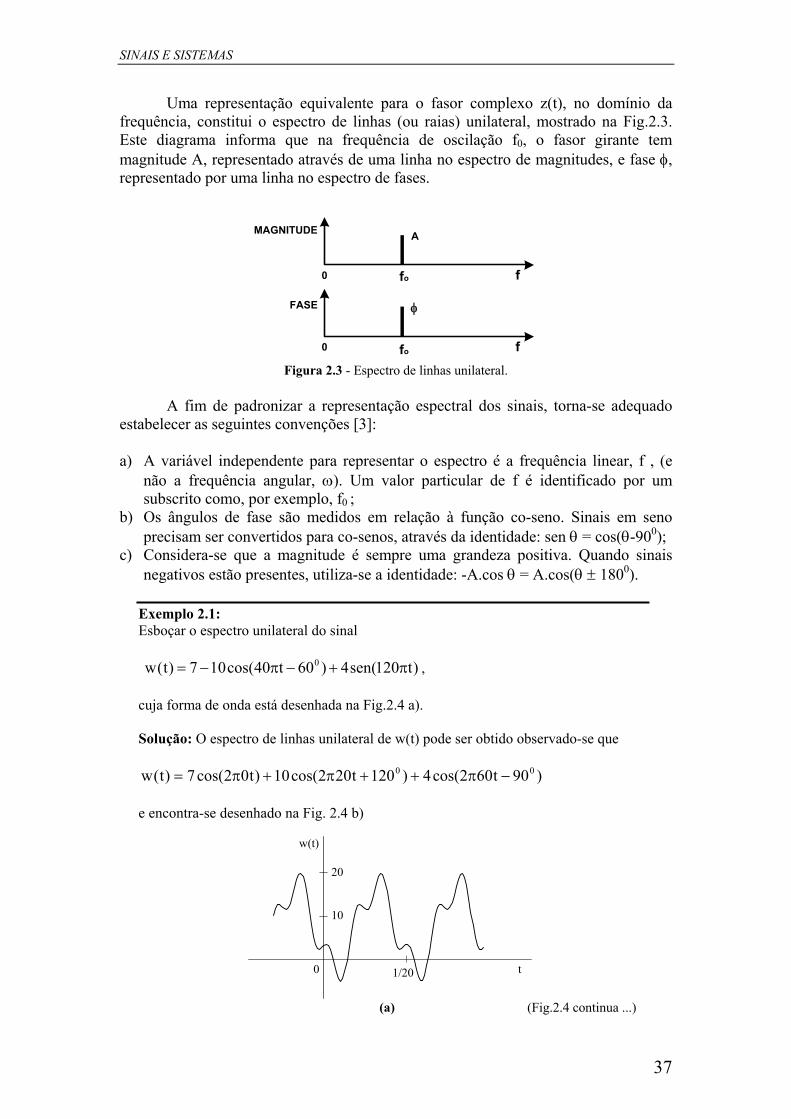
Uma representação equivalente para o fasor complexo z(t), no domínio da frequência, constitui o espectro de linhas (ou raias) unilateral, mostrado na Fig.2.3. Este diagrama informa que na frequência de oscilação f0, o fasor girante tem magnitude A, representado através de uma linha no espectro de magnitudes, e fase , representado por uma linha no espectro de fases.
MAGNITUDE
FASE
0
0
fo
fo
f
f
A
Figura 2.3 - Espectro de linhas unilateral.
A fim de padronizar a representação espectral dos sinais, torna-se adequado estabelecer as seguintes convenções [3]: a) A variável independente para representar o espectro é a frequência linear, f , (e
não a frequência angular, ). Um valor particular de f é identificado por um subscrito como, por exemplo, f0 ;
b) Os ângulos de fase são medidos em relação à função co-seno. Sinais em seno precisam ser convertidos para co-senos, através da identidade: sen = cos(-900);
c) Considera-se que a magnitude é sempre uma grandeza positiva. Quando sinais negativos estão presentes, utiliza-se a identidade: -A.cos = A.cos( 1800).
Exemplo 2.1: Esboçar o espectro unilateral do sinal
)t120sen(4)60t40cos(107)t(w 0 , cuja forma de onda está desenhada na Fig.2.4 a). Solução: O espectro de linhas unilateral de w(t) pode ser obtido observado-se que
)90t602cos(4)120t202cos(10)t02cos(7)t(w 00 e encontra-se desenhado na Fig. 2.4 b)
20
10
0 1/20 t
w(t)
(a) (Fig.2.4 continua ...)

ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
38
MAGNITUDE
FASE
0
0
100
20
f
f
120
20
100
o
-90o
710
4
(b) Figura 2.4 - Análise espectral de w(t). a) Sinal temporal w(t). b) Espectro de w(t).
O exemplo anterior é muito ilustrativo pois evidencia que uma superposição de senóides com diferentes frequências e fases pode dar origem a uma forma de onda não- senoidal, embora ainda periódica. Assim, pode-se indagar se uma outra forma de onda arbitrária (porém periódica) como uma dente-de-serra, por exemplo, poderia ser sintetizada a partir da superposição de senóides. Nas próximas seções esta conjectura será confirmada, através do estudo da série de Fourier. 2.1.2 Espectro de linhas bilateral
As representações espectrais unilaterais podem não ser tão interessantes e genéricas quanto a representação denominada espectro bilateral, que envolve frequências positivas e negativas. Nesse caso, recorre-se à propriedade dos números
complexos *)zz(2
1]zRe[ , onde z é uma grandeza complexa e z* é o seu
complexo conjugado. Assim, a partir de (2.3) e (2.4), para tjj e.e.Az , obtém-se
tjjtjj0
00 ee2
Aee
2
A)tcos(.A)t(x (2.5)
onde 0=2f0. O par de fasores conjugados em (2.5) encontra-se desenhado, no plano complexo, conforme a Fig.2.5
z
ot+Re
Im
0 ot+
z*
A
A
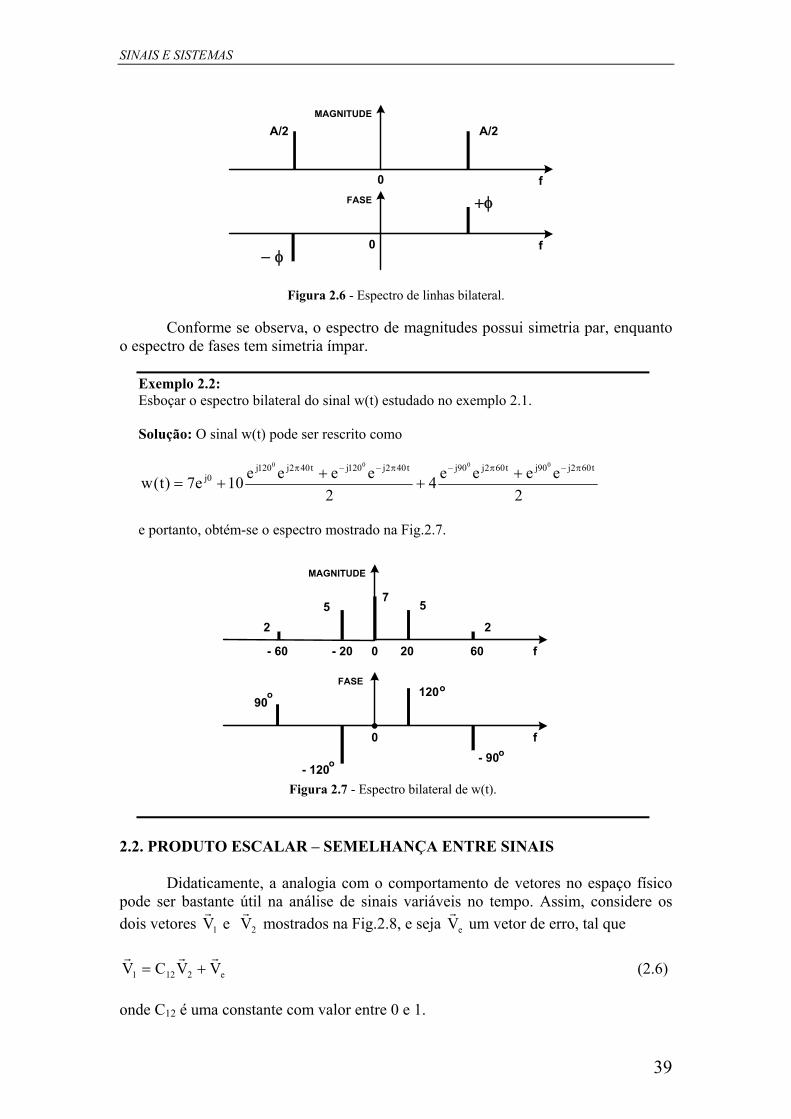
Figura 2.5 - Fasores girantes conjugados. Por sua vez, o espectro de linhas bilateral, encontra-se registrado na Fig.2.6, a qual inclui informações sobre ambos os fasores: o fasor normal, associado à frequência positiva (+f0), e o fasor conjugado, correspondente à frequência negativa (f0), a fim de especificar a direção de rotação negativa (no sentido horário).
SINAIS E SISTEMAS
39
MAGNITUDE
FASE
0
0
A/2A/2
f
f
Figura 2.6 - Espectro de linhas bilateral.
Conforme se observa, o espectro de magnitudes possui simetria par, enquanto o espectro de fases tem simetria ímpar.
Exemplo 2.2: Esboçar o espectro bilateral do sinal w(t) estudado no exemplo 2.1. Solução: O sinal w(t) pode ser rescrito como
2
eeee4
2
eeee10e7)t(w
t602j90jt602j90jt402j120jt402j120j0j
0000
e portanto, obtém-se o espectro mostrado na Fig.2.7.
MAGNITUDE
FASE
0
0
7
f
f
55
22
20 60- 60 - 20
120
- 120
o
o - 90
90
o
o
Figura 2.7 - Espectro bilateral de w(t).
2.2. PRODUTO ESCALAR – SEMELHANÇA ENTRE SINAIS Didaticamente, a analogia com o comportamento de vetores no espaço físico pode ser bastante útil na análise de sinais variáveis no tempo. Assim, considere os
dois vetores 1V
e 2V
mostrados na Fig.2.8, e seja eV
um vetor de erro, tal que
e2121 VVCV
(2.6)
onde C12 é uma constante com valor entre 0 e 1.

ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
40
1V
2V
eV
C12 2V
(a)
1V
2V
eV
C12 2V
(b)
1V
2V
eV
C12 2V
(c)
Figura 2.8 - Análise da “semelhança” entre vetores. A magnitude do vetor erro em b) é menor que nos
casos a) e c). Por inspeção da figura, torna-se evidente que o menor valor do vetor de erro
ocorre no caso b), quando C12 2V
corresponde à projeção ortogonal de 1V
na direção
de 2V
. Nesse caso, costuma-se dizer que C12 2V
corresponde à componente de 1V
na
direção de 2V
, onde C12 é escolhido de modo que o vetor de erro seja mínimo. Uma outra conclusão pode ser extraída, em situações de projeção ortogonal como no caso da Fig.2.8b), observando-se que quanto maior a componente de um vetor na direção do outro, mais “semelhante” serão esses vetores e menor será o vetor de erro [4]. Então, C12 pode ser interpretado como uma medida da “semelhança” entre
1V
e 2V
. Se C12=0, então, 1V
não tem componente na direção de 2V
, sendo os vetores perpendiculares entre si e denominados vetores ortogonais. Neste caso, não existe qualquer relação de dependência entre os vetores, os quais são chamados de vetores independentes. Recorrendo-se a álgebra vetorial, pode-se especificar o fator constante C12 aplicando-se a definição de produto escalar:
2
21212
V
VVVC
(2.7)
onde 2V
é o módulo de 2V
. A partir daí, obtém-se
22
212
2
2112
VV
VV
V
VVC
(2.8)
Observa-se que, se 1V
e 2V
são ortogonais, então, 0VV 21
e C12=0. A seguir, extrapola-se esses conceitos para o caso de sinais. Considere-se f1(t) e f2(t) dois sinais sobre os quais deseja-se estabelecer o grau de similaridade (ou semelhança) através de um fator C12, ou seja, deseja-se estabelecer a aproximação f1(t) C12.f2(t). Para isso, C12 deve ser tal que minimize a função erro fe(t),
)t(fC)t(f)t(f 2121e (2.9) Um critério bastante usado para minimizar fe(t) constitui na minimização do erro quadrático médio, , ou seja, na minimização de

SINAIS E SISTEMAS
41
2
1
t
t
2e
12
dt).t(ftt
1 (2.10)
onde (t2-t1) é um intervalo de observação dentro do qual deseja-se efetuar a comparação dos sinais. Assim, torna-se necessário estabelecer o valor de C12 que satisfaça a condição:
0dC
d
12
(2.11)
ou, substituindo (2.10), que satisfaça a
0dt).t(fC2dt).t(f)t(f2dt.dC
)t(df
tt
1 2
1
2
1
2
1
t
t
22
t
t 1221
t
t12
21
12
(2.12)
Como f1(t) não depende de C12, a primeira integral em (2.12) é nula e, portanto, obtém-se que
2
1
2
1
t
t
22
t
t 21
12
dt)t(f
dt)t(f).t(fC (2.13)
Ressalta-se a semelhança entre a expressão (2.13), para sinais, e (2.8), para
vetores. Assim, por analogia com vetores, C12f2(t) representa a componente de f1(t) sobre o sinal f2(t). Além disso, define-se o produto escalar entre as funções,
)t(f).t(f 21 , num intervalo (t1,t2) por
2
1
t
t 2112
21 dt).t(f).t(ftt
1)t(f).t(f , t1 t t2 (2.14)
de tal forma que (2.13) pode ser escrita como
)t(f
)t(f).t(fC
22
2112 (2.15)
Se C12=0, então, é dito que o sinal f1(t) não contém nenhuma componente do sinal f2(t), e, que as duas funções são ortogonais no intervalo (t1, t2).
Exemplo 2.3: Mostrar que )tnsen()t(f 01 e )tmsen()t(f 02 são ortogonais em qualquer
intervalo (t0, t0+20), para valores de m e n inteiros, mn. Solução: Deve ser mostrado que

ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
42
00
0
/2t
t 000
21 dt).tmsen().tnsen(/2
1)t(f).t(fI
é igual a zero. De fato, desenvolvendo
00
o
00
0
/2t
t00
/2t
t 000
t)mnsen(mn
1t)mnsen(
mn
1
2
1
dt].t)mncos(t)mn[cos(2
1
/2
1I
Uma vez que n e m são inteiros, (n-m) e (n+m) também o são, e assim, I=0 (incentiva-se o leitor a comprovar isto !).
O resultado do exemplo anterior evidencia que )tnsen( 0 e )tmsen( 0 são
funções ortogonais. Pode-se demonstrar que )tncos( 0 e )tmcos( 0 , bem como
)tnsen( 0 e )tmcos( 0 , também são funções ortogonais.
Exemplo 2.4:
Aproximar a função retangular
2/3t
rect2/t
rect)t(f1 pela função
tsen)t(f 2 , no intervalo (0,2), de forma que o erro quadrático médio seja mínimo. Solução: Deseja-se aproximar )t(fC)t(f 2121 , tal que C12 conduza ao erro mínimo. O gráfico de f1(t) está desenhado na Fig. 2.9 (em linha pontilhada).
f(t)
t
Figura 2.9 - Aproximação da função retangular por uma senóide.
Assim, aplicando-se (2.13), obtém-se
4
dt).t(sen
dt.tsen)1(dt.tsenC
2
0
2
2
012
e, portanto,
tsen4
)t(f1 , 0t2
SINAIS E SISTEMAS
43
representa a melhor aproximação de f1(t) por uma função sen t. O desenho de f1(t) também encontra-se na Fig.2.9. Por outro lado, diz-se que a função f1(t) tem uma componente da função sen t cuja magnitude é 4/.
2.3 SÉRIE DE FUNÇÕES
Discute-se nesta seção, a expansão de trechos de funções em séries de funções
ortogonais como, por exemplo, a série de Fourier trigonométrica. Antes, porém, o conceito de ortogonalidade de funções deve ser detalhado.
2.3.1 Ortogonalidade de funções reais
Considere-se, novamente, o caso dos vetores num plano xy, e cujos vetores unitários são xa e ya , conforme esquematizado na Fig.2.10.
F
xa
ya
x
y
x0
y0
0
Figura 2.10 - Vetores no plano xy.
Um vetor F
, com componentes x0 e y0 nas direções x e y, respectivamente, pode ser expresso como
y0x0 ayaxF
(2.16)
Qualquer vetor nesse plano pode ser expresso em termos de xa e ya , vetores
unitários que satisfazem a
nm,1
nm,0aa nm (2.17)
onde m e n correspondem a x e y, respectivamente. Assim, os vetores unitários são ortogonais entre si. Contudo, observa-se que este sistema de coordenadas bidimensional é
inadequado para expressar um vetor F
espacial, sendo necessário haver três eixos de coordenadas. Portanto, para expressar um vetor F
tridimensional é necessário que o
sistema de coordenadas seja completo. O eixo adicional é o eixo z, cujo vetor unitário é za . E assim, um vetor no espaço tridimensional será representado por
z0y0x0 azayaxF
(2.18)
onde xa , ya e za são ortogonais entre si.

ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
44
No caso geral, hipoteticamente n-dimensional, o conjunto completo de vetores unitários deve possuir “n” componentes ortogonais designadas por 1x , 2x , ..., nx , e
assim, um vetor geral F
tem componentes C1 , C2, ..., Cn, tais que
nn2211 xC...xCxCF
(2.19) A condição de ortogonalidade implica que
nm,1
nm,0xx nm (2.20)
O conjunto ( 1x , 2x , ..., nx ) constitui um espaço vetorial ortogonal, onde 1x , 2x , ...,
nx são vetores de base. Em geral, contudo, o produto nm xx pode ser qualquer constante km ao invés da unidade:
nm,k
nm,0xx
mnm (2.21)
Quando km é igual à unidade o conjunto é chamado espaço ortogonal normalizado, ou então, é dito tratar-se de um conjunto ortogonal normalizado ou espaço vetorial ortonormal. Os valores dos componentes, Cr , podem ser obtidos a partir de (2.19), calculando-se inicialmente o produto escalar
...xxC...xxCxxCxF rrrr22r11r
(2.22) e aplicando-se (2.21), a fim de obter
rrr kCxF
(2.23) e portanto
r
r
rr
rr k
xF
xx
xFC
(2.24)
A seguir, extrapola-se esses conceitos para o caso de sinais. Considere-se, então, um conjunto de “n” funções g1(t), g2(t), ..., gn(t) ortogonais entre si, num intervalo t1 a t2, ou seja
kj,k
kj,0dt).t(g).t(g
j
t
t kj
2
1
(2.25)
Uma função arbitrária f(t) pode ser aproximada (sintetizada) num intervalo (t1, t2) pela combinação linear dessa n funções ortogonais:

SINAIS E SISTEMAS
45
21
n
1rrr
nn2211
ttt,)t(gC
)t(gC...)t(gC)t(gC)t(f
(2.26)
A melhor aproximação corresponde àquela onde C1, C2, ..., Cn são tais que
minimizam o erro quadrático médio de fe(t), tal qual em (2.10), o qual será repetido por conveniência:
2
1
t
t
2e
12
dt).t(ftt
1 (2.27)
onde
n
1rrre )t(gC)t(f)t(f (2.28)
Para isto, torna-se necessário impor que
0C
...C
...CC nr21
. (2.29)
Procedendo aos cálculos algébricos em (2.29), pode-se mostrar que o erro
mínimo acontecerá quando
2
12
1
2
1t
t rr
t
t
2r
t
t r
r dt).t(g).t(fk
1
dt).t(g
dt).t(g).t(fC (2.30)
(encoraja-se o leitor a verificar isto). Novamente, é interessante comparar essa expressão com (2.24), e concluir que
r
r
rr
rr k
)t(g).t(f
)t(g).t(g
)t(g).t(fC , t1 t t2 (2.31)
usando-se a definição de produto escalar (2.14). Utilizando-se (2.27), (2.28) e (2.31), o erro quadrático médio será
n
1r
t
t
n
1r
t
t rr2r
2r
t
t
2
12
2
1
2
1
2
1
dt).t(g).t(fC2dt).t(gCdt).t(ftt
1
n
1rr
2r
t
t
2
12
n
1rr
2r
2r
n
1r
2r
t
t
2
12
kCdt).t(ftt
1
kC2kCdt).t(ftt
1
2
1
2
1
(2.32)

ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
46
Torna-se evidente que o erro quadrático médio diminui à medida que aumenta-se n, ou seja, quando f(t) é aproximada por um número maior de funções ortogonais. No limite, quando n, o erro tende a zero e f(t) converge para a soma infinita:
1r
rr )t(gC)t(f , t1 t t2 (2.33)
desde que {gr(t)} constitua um conjunto de funções ortogonais (obedecem a (2.25)) no intervalo (t1, t2) e os coeficientes Cr obedecem a (2.30) ou (2.31).
Exemplo 2.5: Considere-se novamente a função retangular f1(t) estudada no exemplo 2.4, que foi aproximada por uma única função sen(t). Discutir como a aproximação melhora quando se usa um número grande de funções ortogonais tnsen 0 e tmsen 0 , para
m e n inteiros. Solução: A função retangular f1(t) será aproximada por
ntsenC...t2senCtsenC)t(f n211 , 0 t 2 onde
0
2
2
0
2
2
0 1
r
dt.rtsendt.rtsen1
dt.rtsen
dt.rtsen).t(fC
e daí
parr,0
ímparr,r
4Cr
Portanto,
...]t5sen5
1t2sen
3
1t[sen
4)t(f1
, 0 t 2
conforme mostrado na Fig.2.11, considerando-se um, dois, três e quatro termos.
O erro nessa aproximação é dado por (2.32):
2
1
t
t 2221
21
21
12
...kCkCdt).t(ftt
1
onde t2-t1=2 e
2
0
21 2dt).t(f . Também,
2
0
21r dt).t(fk
2
0
2 dt).t(rtsen =.
SINAIS E SISTEMAS
47
t
)t(sen4
(a)
t
)t3sen3
1t(sen
4
(b)
t
)t5sen5
1t3sen
3
1t(sen
4
(c)
t
)t7sen7
1t5sen
5
1t3sen
3
1t(sen
4
(d)
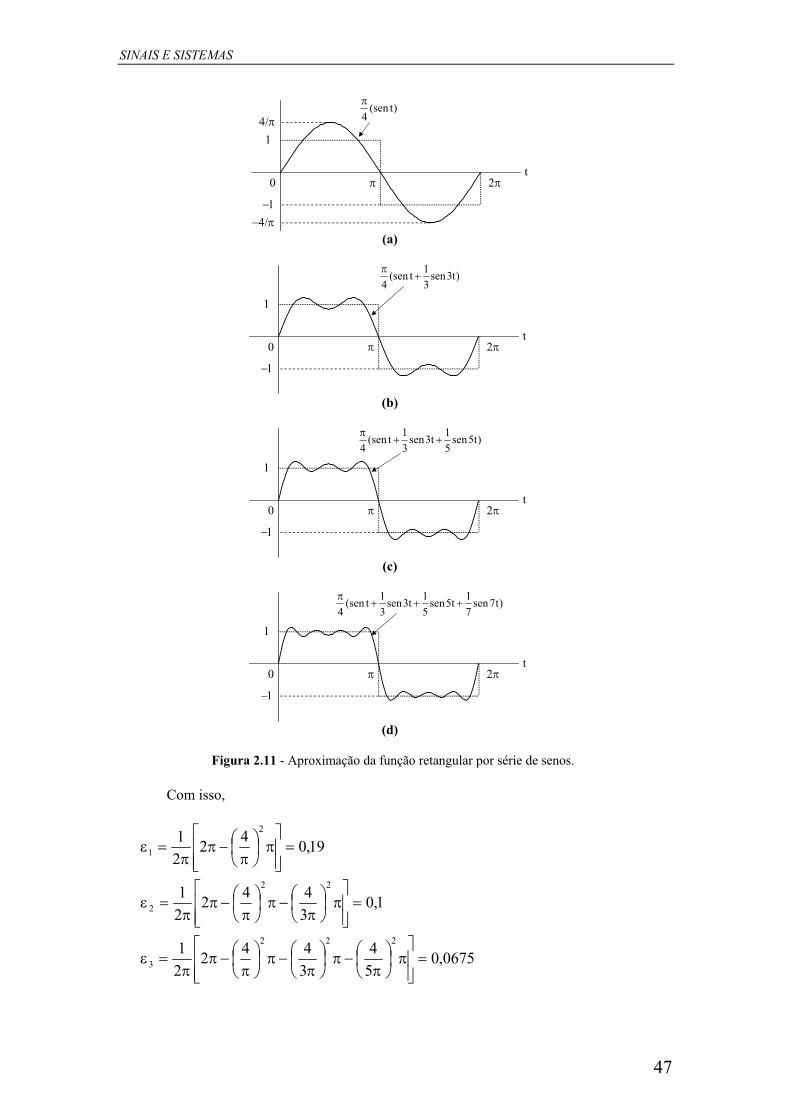
Figura 2.11 - Aproximação da função retangular por série de senos.
Com isso,
19,04
22
12
1
1,03
442
2
122
2
0675,05
4
3
442
2
1222
3
ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
48
051,07
4
5
4
3
442
2
12222
4
evidenciando que, à medida que o número de termos aumenta, o erro diminui e a série se aproxima da função.
2.3.2 Ortogonalidade de funções complexas Nas discussões anteriores, considerou-se apenas funções reais de variáveis reais. Se f1(t) e f2(t) são funções complexas da variável t, pode-se mostrar que f1(t) ainda pode ser representada por C12. f2(t) no intervalo (t1, t2):
)t(f.C)t(f 2121 (2.34) porém, o valor ótimo de C12 que minimiza a magnitude do erro quadrático médio é
2
1
2
1
t
t
*22
t
t
*21
12
dt).t(f).t(f
dt).t(f).t(fC (2.35)
onde * indica complexo conjugado. Por outro lado, mostra-se que f(t) pode ser expressa como
.....)t(gC...)t(gC)t(gC)t(f rr2211 (2.36) em termos de um conjunto {gr(t)} de funções ortogonais, isto é
nm,k
nm,0dt).t(g).t(g
n
t
t
*nm
2
1
(2.37)
desde que
2
1
t
t
*r
rr dt).t(g).t(f
k
1C (2.38)
a fim de minimizar a magnitude do erro quadrático médio. Constituem exemplos de funções ortogonais as funções trigonométricas (como visto em exemplos anteriores), as exponenciais complexas, os polinômios de Legendre, os polinômios de Jacobi, as funções de Bessel, etc [4].
Exemplo 2.6:
Mostrar que as exponenciais complexas ,e)t( tjnn
0 para n = 0, 1, 2, ..., constituem um conjunto de funções ortogonais.

SINAIS E SISTEMAS
49
Solução: Para cada valor inteiro de n, a função n(t) é uma função periódica com frequência angular fundamental n0 e período Tn=2/n0. Como T0=2/0, então
T0=n Tn, e cada intervalo de duração T0 contém n ciclos completos de e jn t0 . A integral
e dt n t jsin n t dtT n
njn t
t
t T
t
t T
0
0
0 0
0
0 0
0 0
0 0
0 0
(cos ),
,
pois para n=0, e jn t0 1 e a integral equivale ao período de integração T0. Com n diferente de zero, o intervalo de integração possui um número de ciclos completos de seno e coseno, cuja integral se anula.
Se tomarmos o complexo conjugado da função e jn t0 , tem-se:
njn t jn tt e n t jsin n t n t jsin n t e( ) (cos ) (cos )0 0
0 0 0 0
Assim, vamos avaliar a integral:
00
0
00/2t
t
*tjmtjn dt)e).(e(I
Se n=m, resulta
0
/2t
t
2dtI
00
0
Se nm, resulta
]1e[e)mn(j
1
e)mn(j
1I
)mn(2jt)mn(j
0
/2t
t
t)mn(j
0
0
00
0
0
Como (n-m) também é um inteiro, resulta I=0. Portanto,
m
Tn
j m n t
t
t T
t t dt e dtT m n
m n( ). ( ),,
( )
0
0
0
0 0
00
Esta é a propriedade de ortogonalidade do conjunto de exponenciais complexas n(t).
2.3.3 Série trigonométrica de Fourier Foi mostrado no exemplo 2.3, que tsen 0 , t2sen 0 , etc., formam um
conjunto ortogonal em qualquer intervalo (t0, t0+20). Entretanto, esse conjunto não
ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
50
é completo, pois também deveriam ser incluídas as funções co-seno. Assim, uma expansão mais geral seria
...t2senbtsenb...t2cosatcosaa)t(f 020102010 (2.39)
para t0 t t0+20. Usando-se uma notação mais compacta,
])t.nsen(b)t.ncos(a[a)t(f1n
0n0n0
(2.40)
para t0 t t0+T, onde T=20. Os coeficientes an e bn devem obedecer a (2.38), valendo então
Tt
t0
0
0
dt).t(fT
1a (2.41)
Tt
t 02
Tt
t 0
n0
0
0
0
dt).tn(cos
dt)tncos().t(fa (2.42)
Tt
t 02
Tt
t 0
n0
0
0
0
dt).tn(sen
dt)tnsen().t(fb (2.43)
O valor a0 corresponde ao valor médio ou componente DC de f(t) no intervalo (t0, t0+T). Como as integrais nos denominadores valem T/2 (verificar isto !), então
Tt
t 0n
0
0
dt)tncos().t(fT
2a (2.44)
Tt
t 0n
0
0
dt)tnsen().t(fT
2b (2.45)
É possível mostrar ainda (vide exercícios) que a série trigonométrica de
Fourier (2.40) também pode ser escrita na forma:
0n
n0n )t.ncos(c)t(f (2.46)
onde
2n
2nn bac (2.47a)
n
n1n a
btg (2.47b)

SINAIS E SISTEMAS
51
É importante ressaltar que a expansão que se apresenta é garantida somente dentro do intervalo (t0, t0+T0), nada sendo afirmado quanto ao comportamento da série fora do intervalo, a não ser no caso de funções periódicas, conforme discutido adiante. 2.3.4 Série de Fourier-Legendre Um conjunto de polinômios de Legendre {Pn(x)}, forma um conjunto completo de funções no intervalo (-1 t +1). Tais polinômios são [4] P0(t) = 1 (2.48a) P1(t) = t (2.48b)
2
1t
2
3)t(P 2
2 (2.48c)
t2
3t
2
5)t(P 3
3 (2.48d)
os quais obedecem à relação
n2n
n
nn )1t(dt
d
!n2
1)t(P (2.49)
Pode ser verificado que
nm,1m2
2nm,0
dt).t(P).t(P1
1 nm (2.50)
Então, f(t) pode ser expressa em termos da série de polinômios de Legendre no
intervalo (-1 t +1):
0n
nn1100 )t(PC...)t(PC)t(PC)t(f (2.51)
onde Cn obedece a (2.38):
1
1
2r
1
1 r1
r
dt).t(P
dt).t(P).t(fC
e finalmente
1
1 r1r dt).t(P).t(f2
1r2C (2.52)
2.3.5 A Série exponencial de Fourier Conforme visto no exemplo (2.6), as funções exponenciais complexas também formam um conjunto, }e{ tjn 0 , para (n = 0, 1, 2, ...), que é ortogonal e completo no

ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
52
intervalo t0 t t0+20. Ou seja
mn,0
mn,T2
dt)e).(e(0
/2t
t
*tjmtjn00
0
00 (2.53)
Portanto, uma função f(t) pode ser expandida como série
tjn
nn
t2j2
tj1
t2j2
tj10
0
0000
e.C
...e.Ce.C...e.Ce.CC)t(f
(2.54)
para t0 < t < t0+20, onde
Tt
t
tjn
Tt
t
*tjntjn
Tt
t
*tjn
n
0
0
0
0
0
00
0
0
0
dte).t(fT
1
dt.)e).(e(
dt)e).(t(fC
(2.55)
Antes de prosseguir, cita-se que as notações T Tt
t
0
0
dt{.} ou T
dt{.} , para
representar uma integral ao longo de um dado intervalo de tempo T serão usadas indistintamente, conforme a conveniência. 2.3.6 Representação de uma função periódica pela série de Fourier Em seções anteriores representou-se a função f(t) pela série de Fourier no intervalo t0 < t < t0+T. Fora desse intervalo, f(t) e a série correspondente não precisam ser iguais, conforme ilustra a Fig.2.12 a), onde t0=0.
Entretanto, se uma função x(t) for periódica, conforme esquematizado na Fig.2.12 b), pode-se mostrar que a representação da série complexa (2.54), por exemplo, se aplica para todo o intervalo < t < . Neste caso, basta observar o comportamento de
n
tjnn
0e.C)t(x para t0 t t0+T (2.56)
sendo x(t) periódica com período T=1/f0.
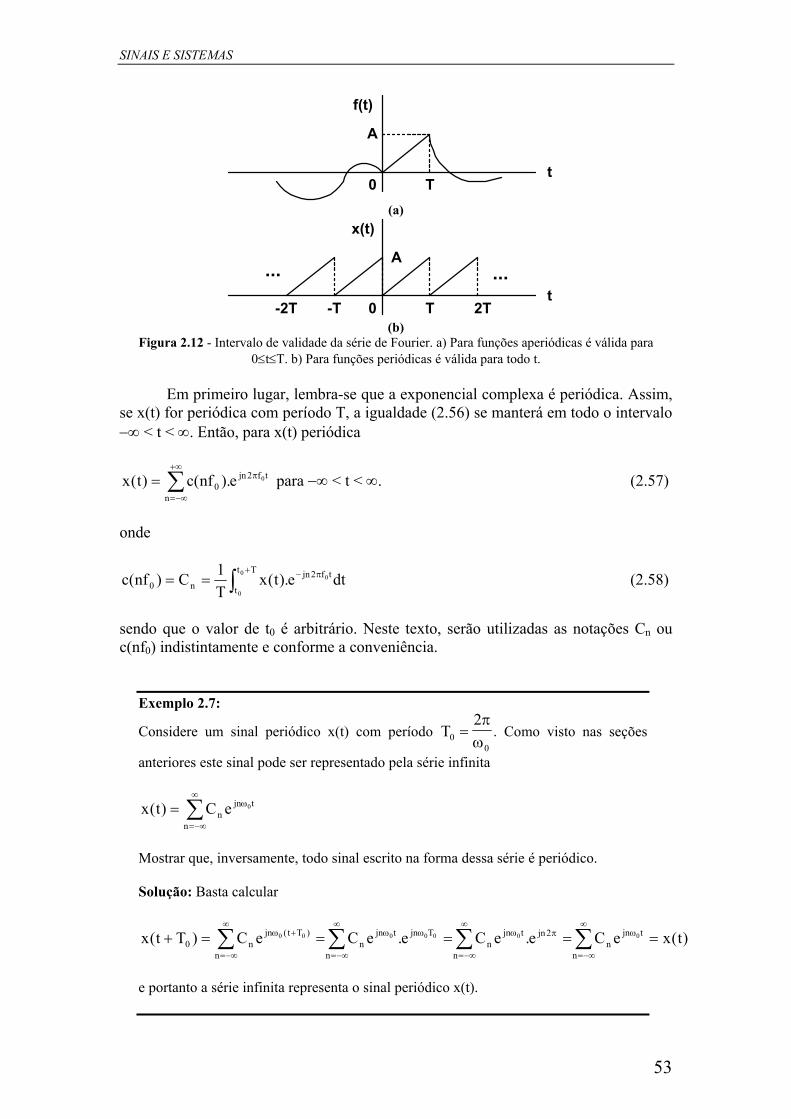
SINAIS E SISTEMAS
53
T0t
f(t)
A
(a)
......
T-T 2T-2T 0t
x(t)
A
(b)
Figura 2.12 - Intervalo de validade da série de Fourier. a) Para funções aperiódicas é válida para 0tT. b) Para funções periódicas é válida para todo t.
Em primeiro lugar, lembra-se que a exponencial complexa é periódica. Assim,
se x(t) for periódica com período T, a igualdade (2.56) se manterá em todo o intervalo < t < . Então, para x(t) periódica
n
tf2jn0
0e).nf(c)t(x para < t < . (2.57)
onde
Tt
t
tf2jnn0
0
0
0 dte).t(xT
1C)nf(c (2.58)
sendo que o valor de t0 é arbitrário. Neste texto, serão utilizadas as notações Cn ou c(nf0) indistintamente e conforme a conveniência.
Exemplo 2.7:
Considere um sinal periódico x(t) com período T00
2
. Como visto nas seções
anteriores este sinal pode ser representado pela série infinita
n
tjnn
0eC)t(x
Mostrar que, inversamente, todo sinal escrito na forma dessa série é periódico. Solução: Basta calcular
n
tjnn
n
2jntjnn
n
Tjntjnn
n
)Tt(jnn0 )t(xeCe.eCe.eCeC)Tt(x 0000000
e portanto a série infinita representa o sinal periódico x(t).

ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
54
Note que, até agora não se fez nenhuma consideração em relação à forma do sinal periódico, ou seja, em princípio a representação (2.57) se aplicaria a qualquer sinal periódico. Esta é a Série de Fourier Exponencial Complexa, ou simplesmente Série de Fourier Complexa do sinal x(t). Veremos mais à frente que nem todos os sinais periódicos podem ser representados por meio da série de Fourier, mas que ela é aplicável na maioria dos casos práticos.
Exemplo 2.8: Foi visto na teoria, que se os coeficientes da série de Fourier obedecem a (2.58), então, o erro entre x(t) e a série será mínimo. Sob outro ponto de vista, mostrar que se (2.57) for satisfeita com exatidão, então, os coeficientes devem obrigatoriamente satisfazer a (2.58). Solução: Os coeficientes da série, Ck , onde k=0, 1, 2, ..., que podem assumir valores complexos, são obtidos através de:
x t C ekjk t
k
( )
0
multiplicando ambos os lados por e jn t 0 e integrando num intervalo de tempo de duração T0 :
x t e dt C e e dt C e dtT
jn tk
jk t jn t
kTk
k
j k n t
T
( ). ( )
0
0 0 0
0
0
0
Como a integral, já vista anteriormente, tem valor:
e dtT k n
k nj k n t
t
t T( ) ,
,
0
0
0 00
0
a somatória para k variando de - a + só terá um valor diferente de zero quando k=n. Portanto:
x t e dt C TT
jn tn( ).
0
00
e os coeficientes são dados por:
dte.)t(xT
1C tjn
T0n
0
0
Neste ponto da análise é importante antecipar a importância da série de Fourier complexa na representação de sinais periódicos. Ao contrário das demais funções ortogonais, as exponenciais complexas exibem propriedades únicas, que as tornam apropriadas para atuarem como funções de base para expansões em série de funções: derivadas e integrais de exponenciais complexas também resultam em exponenciais complexas; o produto (ou divisão) de exponenciais complexas envolve tão somente a

SINAIS E SISTEMAS
55
soma (ou subtração) de seus argumentos; exponenciais complexas têm íntima relação com as funções seno e co-seno trigonométricas e hiperbólicas, dentre outras. 2.4 ESPECTRO DE FREQUÊNCIA DISCRETO
Os coeficientes Ck são os coeficientes da série de Fourier do sinal periódico x(t), também chamados de coeficientes espectrais de x(t). Eles medem a contribuição de cada exponencial complexa nas frequências múltiplas (harmônicas) da frequência fundamental 0. A fim de enfatizar suas expressões, repetem-se as equações da série de Fourier complexa de síntese e de análise de sinais:
n
tf2jn0
0e)nf(c)t(x (equação de síntese) (2.59)
dte.)t(xT
1C)nf(c tf2jn
T0n0
0
0
(equação de análise) (2.60)
onde f0 é a frequência fundamental e os coeficientes Cn, n=0, 1, 2, ... são unicamente determinados a partir de x(t), utilizando a equação de análise. Para n=0, tem-se:
dt)t(xT
1C)0(c
0T00
(2.61)
que é o valor médio do sinal x(t). Num sistema elétrico, isso equivaleria ao nível DC do sinal.
Com exceção de eventuais descontinuidades, e admitindo que x(t) obedece às condições de Dirichlet, a serem vistas na seção 2.5, pode-se dizer que os coeficientes determinam a função x(t) de maneira única. Assim, há uma correspondência entre x(t) e o conjunto de coeficientes {Cn}. Como cada Cn revela o conteúdo de x(t) em cada frequência n.f0, o conjunto {Cn} é chamado de espectro de linhas ou espectro de frequência discreto de x(t).
Os coeficientes são, em geral, funções complexas de n ou n.f0. Algumas propriedades dos coeficientes são desenvolvidas a seguir.
Se a função x(t) é real, então x*(t)=x(t). Assim, (2.60) conduz a:
ntf2jn
T0
*
tf2jn
T0
*n Cdte.)t(x
T
1dte.)t(x
T
1C 0
0
0
0
Portanto para x(t) real:
n*n CC c*(nf0) = c(-nf0) (2.65)
que é a chamada simetria conjugada ou simetria Hermitiana.
Se Cn é representado por sua forma retangular ou polar:
ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
56
]Carg[jnnnn
ne|C|jC (2.66) onde n e n correspondem às partes real e imaginária de Cn, respectivamente, e Cn = c(nf0) e arg[Cn] = arg [c(nf0)] correspondem ao módulo (ou magnitude) e argumento (ou fase) de Cn , respectivamente, com
2/12n
2nn )(|C| (2.67)
n
n1k tan]Carg[
(2.68)
então
nn*nnnn jCjC (2.69)
logo
nn
nn
(2.70)
e
|C||C| nn |)nf(c||)nf(c| 00 (2.71a)
]Carg[]Carg[ nn )]nf(carg[)]nf(carg[ 00 (2.71b)
O gráfico de |Cn| em função de n, ou nf0, é chamado de espectro de magnitudes
de x(t), que no caso de x(t) ser real, é uma função par. O gráfico de arg[Cn] em função de n, ou nf0, é o espectro de fase, que no caso de x(t) ser real, é uma função ímpar.
Exemplo 2.9: Obter os coeficientes da série de Fourier complexa de a) t3cos3tsen1)t(x 00
b) t1.2cost2.1sin2t6.0cos31)t(x Solução: a) Usando a fórmula de Euler:
x te e
j
e e
eje
je e
j t j t j t j t
j t j t j t j t
( )
12
32
3
2
1
21
1
2
3
2
0 0 0 0
0 0 0 0
3 3
3 3
a qual já se encontra na forma de soma de exponenciais complexas e, portanto

SINAIS E SISTEMAS
57
C C
C Cj
C
3 3
1 1
0
3
21
2
1
Os gráficos do módulo e da fase dos coeficientes da série são mostrados na
Fig.2.13:
|Cn| 1
1/2
3/2
1/2
3/2
... -4 -3 -2 -1 0 1 2 3 4 ... n
arg [Cn]
... -4 -3 -2 -1 0 1 2 3 4 ... n
90
-90
180
-180
Figura 2.13 - Espectro de magnitude e fase de x(t).
Nota-se que o módulo é uma função par e a fase uma função ímpar.
b) No caso de t1.2cost2.1sin2t6.0cos31)t(x , devemos primeiro verificar se x(t) é um sinal periódico. Observando as frequências dos sinais, chega-se à conclusão que a frequência fundamental é igual a 0=0.3, e as componentes senoidais correspondem àquelas nas frequências 20,40 e 70. Logo tem-se: x t t sin t t( ) cos cos 1 3 2 2 4 70 0 0 , e
C C
C Cj
C C
C
7 7
4 4
2 2
0
1
21
3
21
Devido à simplicidade dos sinais do exemplo anterior, não houve a necessidade de aplicar (2.60) para determinar os coeficientes da série. O próximo exemplo ilustra o cálculo desses coeficientes para um sinal mais elaborado.

ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
58
Exemplo 2.10: Obter a série de Fourier e desenhar o espectro de frequências da forma de onda retangular mostrada na Fig.2.14.
A
- T0-T0tT0/2-T0/2
x(t)
Figura 2.14 – Forma de onda retangular periódica.
Solução: Num período, entre -T0/2 e T0/2, tem-se que:
.c.c,0
2/t2/,A)t(x
Logo,
00
0
00
0
0
2/jn2/jn
0
2/
2/
tjn
0n Tn
)2/n(sinA2
Tjn
)2/n(sinjA2
jn
ee
T
AdteA
T
1C
00
0
onde 00
0 f2T
2
Portanto,
)nf(sincAf)nf(sincT
A
nf
)nf(sin
T
A
T/2n
]2/).T/2(n[sin.
T
A2C 000
00
0
00
0
0n
onde
sinc xsin x
x( )
( )
O gráfico da função sinc(x) foi estudado no Capítulo 1. Para o caso particular de
uma onda na qual T0=1/f0= 4, fica-se com:
)4
n(sinc
4
ACk
e o gráfico dos coeficientes da série encontra-se desenhado na Fig.2.15 a).
Contudo, sendo rigoroso e seguindo a convenção adotada no início deste capítulo,
na qual considera-se que a magnitude seja uma grandeza positiva, sendo o sinal negativo levado em conta através do ângulo de fase de 1800, obtém-se os gráficos de módulo e fase mostrados nas Figs. 2.15b) e c).
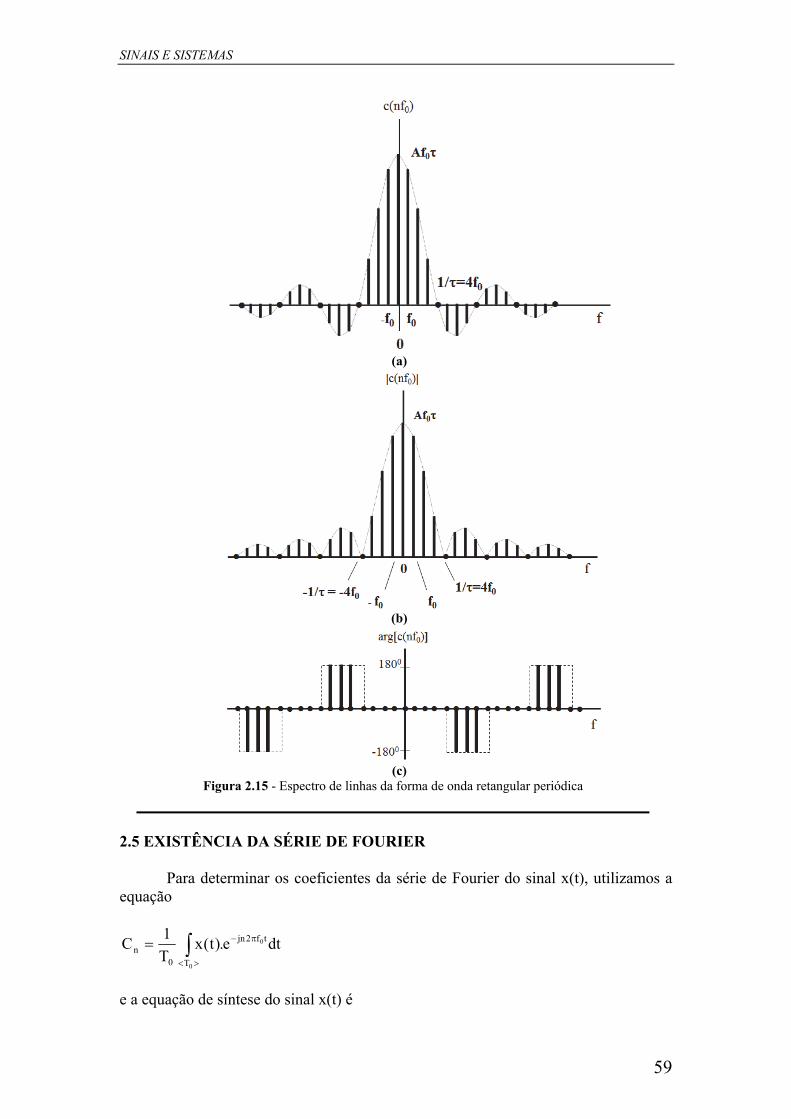
SINAIS E SISTEMAS
59
(a)
(b)
(c)
Figura 2.15 - Espectro de linhas da forma de onda retangular periódica
2.5 EXISTÊNCIA DA SÉRIE DE FOURIER
Para determinar os coeficientes da série de Fourier do sinal x(t), utilizamos a equação
dte.)t(xT
1C tf2jn
T0n
0
0
e a equação de síntese do sinal x(t) é
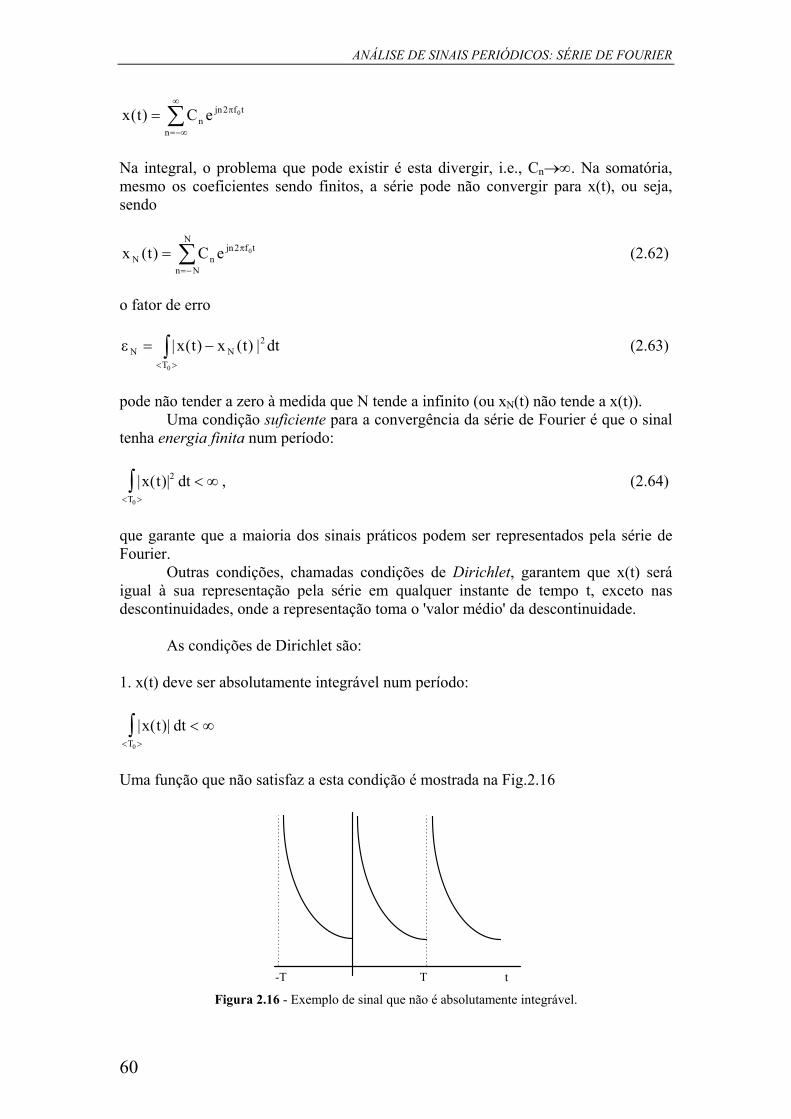
ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
60
n
tf2jnn
0eC)t(x
Na integral, o problema que pode existir é esta divergir, i.e., Cn. Na somatória, mesmo os coeficientes sendo finitos, a série pode não convergir para x(t), ou seja, sendo
N
Nn
tf2jnnN
0eC)t(x (2.62)
o fator de erro
dt|)t(x)t(x| 2N
T
N
0
(2.63)
pode não tender a zero à medida que N tende a infinito (ou xN(t) não tende a x(t)).
Uma condição suficiente para a convergência da série de Fourier é que o sinal tenha energia finita num período:
| ( )| T
x t dt0
2 , (2.64)
que garante que a maioria dos sinais práticos podem ser representados pela série de Fourier.
Outras condições, chamadas condições de Dirichlet, garantem que x(t) será igual à sua representação pela série em qualquer instante de tempo t, exceto nas descontinuidades, onde a representação toma o 'valor médio' da descontinuidade.
As condições de Dirichlet são: 1. x(t) deve ser absolutamente integrável num período:
| ( )| T
x t dt0
Uma função que não satisfaz a esta condição é mostrada na Fig.2.16
tT-T
Figura 2.16 - Exemplo de sinal que não é absolutamente integrável.
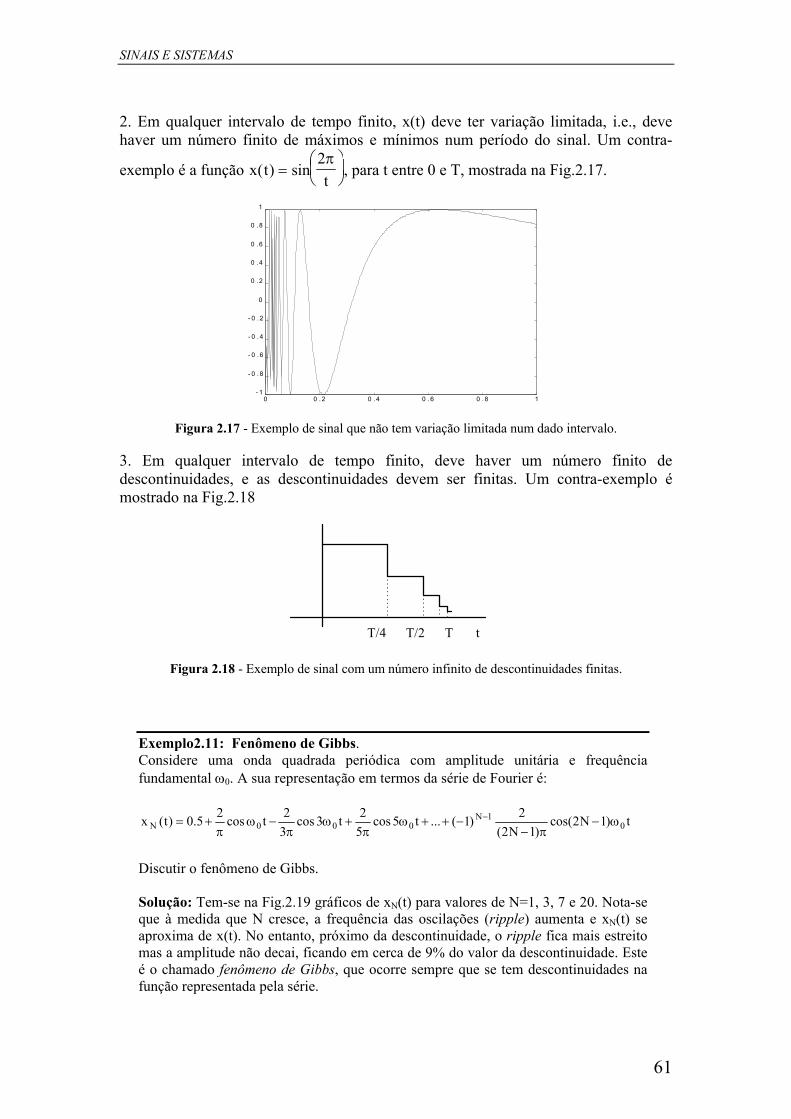
SINAIS E SISTEMAS
61
2. Em qualquer intervalo de tempo finito, x(t) deve ter variação limitada, i.e., deve haver um número finito de máximos e mínimos num período do sinal. Um contra-
exemplo é a função x t sint
( )
2, para t entre 0 e T, mostrada na Fig.2.17.
0 0 . 2 0 . 4 0 . 6 0 . 8 1- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
Figura 2.17 - Exemplo de sinal que não tem variação limitada num dado intervalo.
3. Em qualquer intervalo de tempo finito, deve haver um número finito de descontinuidades, e as descontinuidades devem ser finitas. Um contra-exemplo é mostrado na Fig.2.18
T/4 T/2 T t
Figura 2.18 - Exemplo de sinal com um número infinito de descontinuidades finitas. Exemplo2.11: Fenômeno de Gibbs. Considere uma onda quadrada periódica com amplitude unitária e frequência fundamental 0. A sua representação em termos da série de Fourier é:
t)1N2cos()1N2(
2)1(...t5cos
5
2t3cos
3
2tcos
25.0)t(x 0
1N000N
Discutir o fenômeno de Gibbs. Solução: Tem-se na Fig.2.19 gráficos de xN(t) para valores de N=1, 3, 7 e 20. Nota-se que à medida que N cresce, a frequência das oscilações (ripple) aumenta e xN(t) se aproxima de x(t). No entanto, próximo da descontinuidade, o ripple fica mais estreito mas a amplitude não decai, ficando em cerca de 9% do valor da descontinuidade. Este é o chamado fenômeno de Gibbs, que ocorre sempre que se tem descontinuidades na função representada pela série.
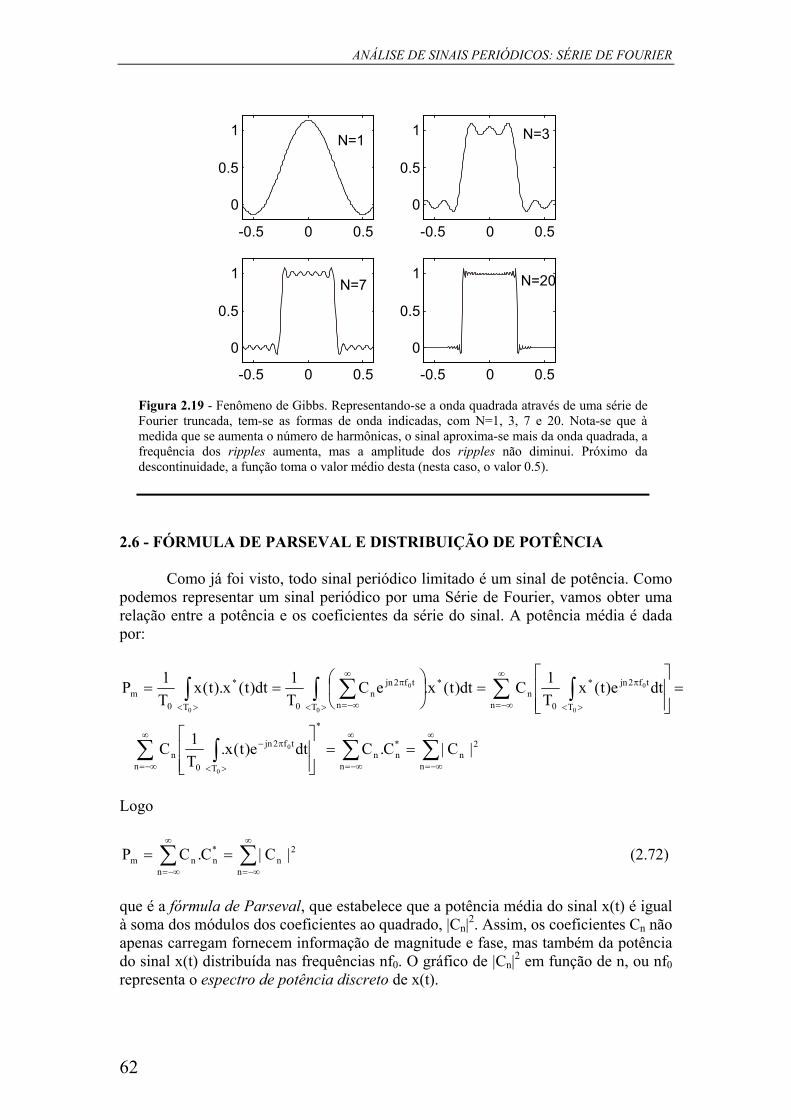
ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
62
-0.5 0 0.5
0
0.5
1N=1
-0.5 0 0.5
0
0.5
1 N=3
-0.5 0 0.5
0
0.5
1N=7
-0.5 0 0.5
0
0.5
1 N=20
Figura 2.19 - Fenômeno de Gibbs. Representando-se a onda quadrada através de uma série de Fourier truncada, tem-se as formas de onda indicadas, com N=1, 3, 7 e 20. Nota-se que à medida que se aumenta o número de harmônicas, o sinal aproxima-se mais da onda quadrada, a frequência dos ripples aumenta, mas a amplitude dos ripples não diminui. Próximo da descontinuidade, a função toma o valor médio desta (nesta caso, o valor 0.5).
2.6 - FÓRMULA DE PARSEVAL E DISTRIBUIÇÃO DE POTÊNCIA
Como já foi visto, todo sinal periódico limitado é um sinal de potência. Como podemos representar um sinal periódico por uma Série de Fourier, vamos obter uma relação entre a potência e os coeficientes da série do sinal. A potência média é dada por:
n
2n
n
*nn
*
n T
tf2jn
0n
n T
tf2jn*
0n
T
*
n
tf2jnn
0T
*
0m
|C|C.Cdte)t(x.T
1C
dte)t(xT
1Cdt)t(x.eC
T
1dt)t(x).t(x
T
1P
0
0
0
0
0
0
0
Logo
n
2n
n
*nnm |C|C.CP (2.72)
que é a fórmula de Parseval, que estabelece que a potência média do sinal x(t) é igual à soma dos módulos dos coeficientes ao quadrado, |Cn|
2. Assim, os coeficientes Cn não apenas carregam fornecem informação de magnitude e fase, mas também da potência do sinal x(t) distribuída nas frequências nf0. O gráfico de |Cn|
2 em função de n, ou nf0 representa o espectro de potência discreto de x(t).
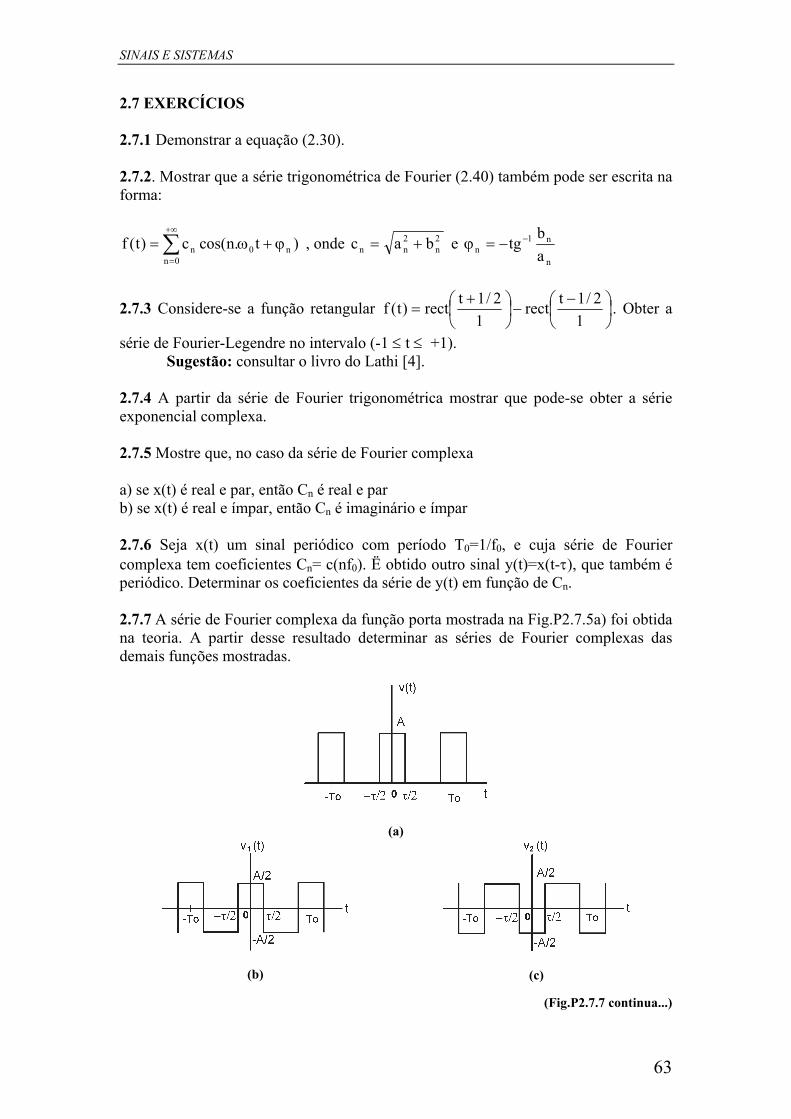
SINAIS E SISTEMAS
63
2.7 EXERCÍCIOS 2.7.1 Demonstrar a equação (2.30). 2.7.2. Mostrar que a série trigonométrica de Fourier (2.40) também pode ser escrita na forma:
0n
n0n )t.ncos(c)t(f , onde 2n
2nn bac e
n
n1n a
btg
2.7.3 Considere-se a função retangular
1
2/1trect
1
2/1trect)t(f . Obter a
série de Fourier-Legendre no intervalo (-1 t +1). Sugestão: consultar o livro do Lathi [4].
2.7.4 A partir da série de Fourier trigonométrica mostrar que pode-se obter a série exponencial complexa. 2.7.5 Mostre que, no caso da série de Fourier complexa a) se x(t) é real e par, então Cn é real e par b) se x(t) é real e ímpar, então Cn é imaginário e ímpar 2.7.6 Seja x(t) um sinal periódico com período T0=1/f0, e cuja série de Fourier complexa tem coeficientes Cn= c(nf0). Ë obtido outro sinal y(t)=x(t-), que também é periódico. Determinar os coeficientes da série de y(t) em função de Cn. 2.7.7 A série de Fourier complexa da função porta mostrada na Fig.P2.7.5a) foi obtida na teoria. A partir desse resultado determinar as séries de Fourier complexas das demais funções mostradas.
(a)
(b)
(c)
(Fig.P2.7.7 continua...)
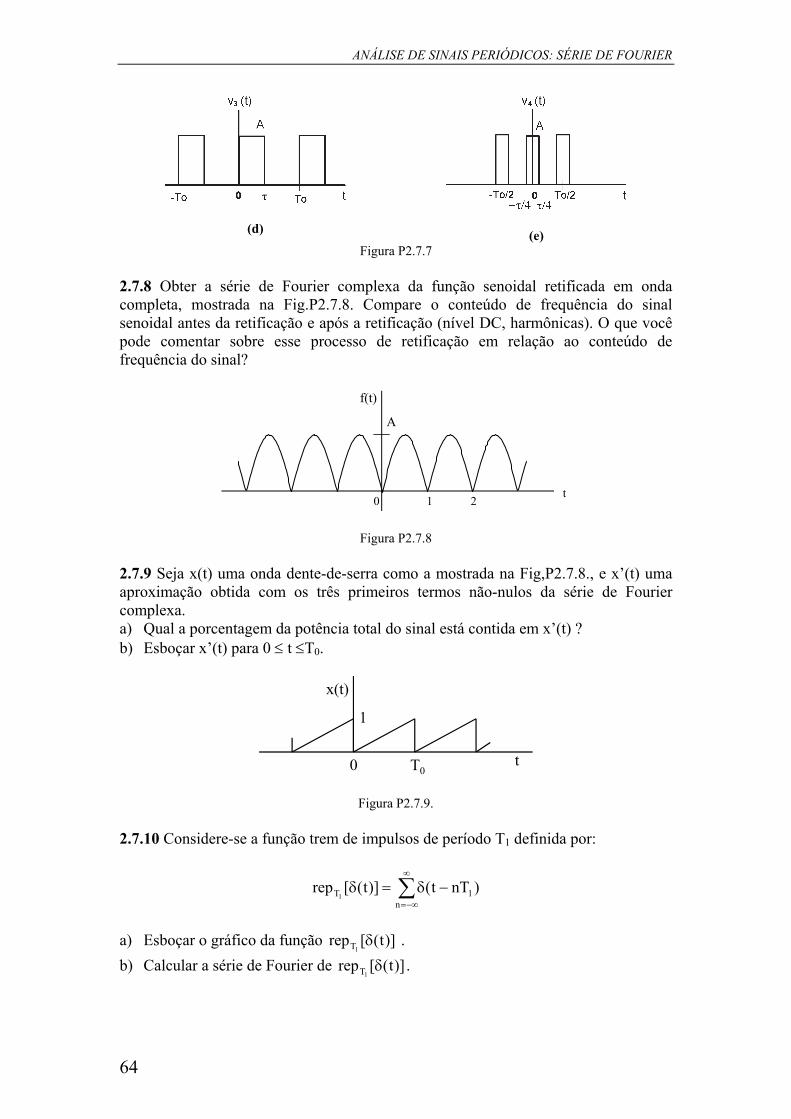
ANÁLISE DE SINAIS PERIÓDICOS: SÉRIE DE FOURIER
64
(d)
(e) Figura P2.7.7
2.7.8 Obter a série de Fourier complexa da função senoidal retificada em onda completa, mostrada na Fig.P2.7.8. Compare o conteúdo de frequência do sinal senoidal antes da retificação e após a retificação (nível DC, harmônicas). O que você pode comentar sobre esse processo de retificação em relação ao conteúdo de frequência do sinal?
t
f(t)
0 1 2
A
Figura P2.7.8 2.7.9 Seja x(t) uma onda dente-de-serra como a mostrada na Fig,P2.7.8., e x’(t) uma aproximação obtida com os três primeiros termos não-nulos da série de Fourier complexa. a) Qual a porcentagem da potência total do sinal está contida em x’(t) ? b) Esboçar x’(t) para 0 t T0.
0 T0
1
x(t)
t
Figura P2.7.9.
2.7.10 Considere-se a função trem de impulsos de período T1 definida por:
n
1T )nTt()]t([rep1
a) Esboçar o gráfico da função )]t([rep
1T .
b) Calcular a série de Fourier de )]t([rep1T .
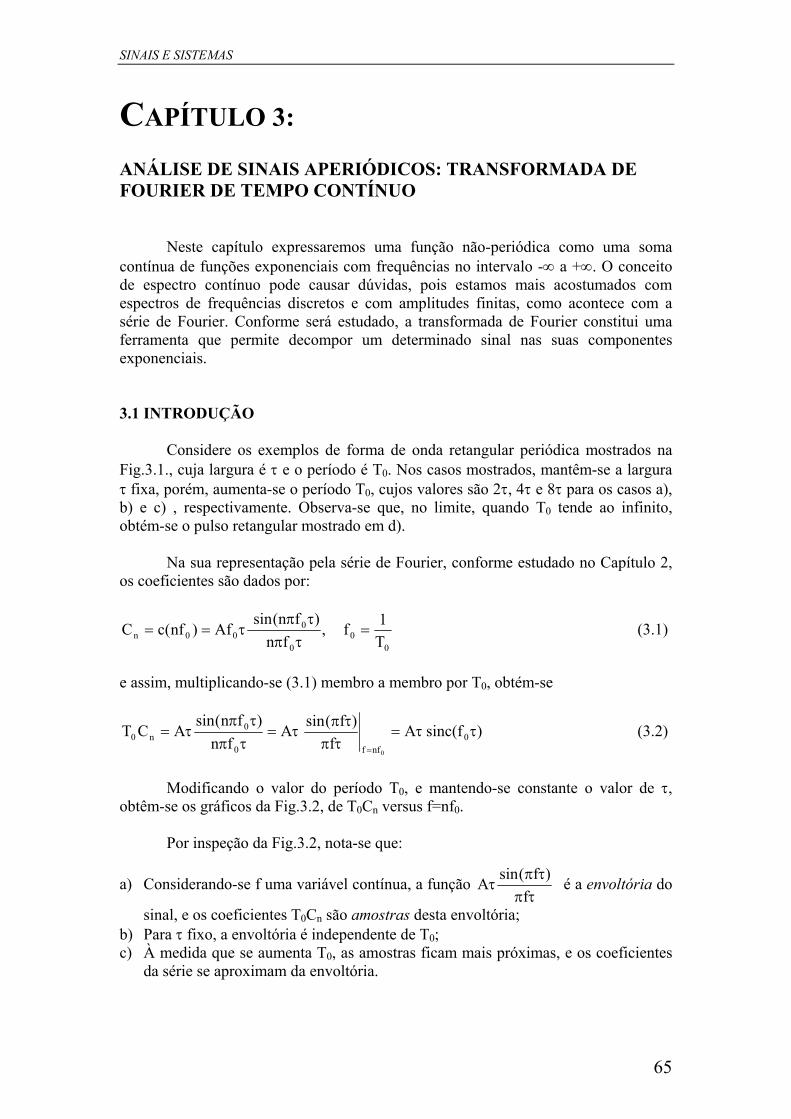
SINAIS E SISTEMAS
65
CAPÍTULO 3: ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
Neste capítulo expressaremos uma função não-periódica como uma soma contínua de funções exponenciais com frequências no intervalo - a +. O conceito de espectro contínuo pode causar dúvidas, pois estamos mais acostumados com espectros de frequências discretos e com amplitudes finitas, como acontece com a série de Fourier. Conforme será estudado, a transformada de Fourier constitui uma ferramenta que permite decompor um determinado sinal nas suas componentes exponenciais.
3.1 INTRODUÇÃO
Considere os exemplos de forma de onda retangular periódica mostrados na Fig.3.1., cuja largura é e o período é T0. Nos casos mostrados, mantêm-se a largura fixa, porém, aumenta-se o período T0, cujos valores são 2, 4 e 8 para os casos a), b) e c) , respectivamente. Observa-se que, no limite, quando T0 tende ao infinito, obtém-se o pulso retangular mostrado em d).
Na sua representação pela série de Fourier, conforme estudado no Capítulo 2,
os coeficientes são dados por:
00
0
000n T
1f,
fn
)fn(sinAf)nf(cC
(3.1)
e assim, multiplicando-se (3.1) membro a membro por T0, obtém-se
)f(sincAf
)f(sinA
fn
)fn(sinACT 0
nff0
0n0
0
(3.2)
Modificando o valor do período T0, e mantendo-se constante o valor de ,
obtêm-se os gráficos da Fig.3.2, de T0Cn versus f=nf0. Por inspeção da Fig.3.2, nota-se que:
a) Considerando-se f uma variável contínua, a função
f
)f(sinA é a envoltória do
sinal, e os coeficientes T0Cn são amostras desta envoltória; b) Para fixo, a envoltória é independente de T0; c) À medida que se aumenta T0, as amostras ficam mais próximas, e os coeficientes
da série se aproximam da envoltória.
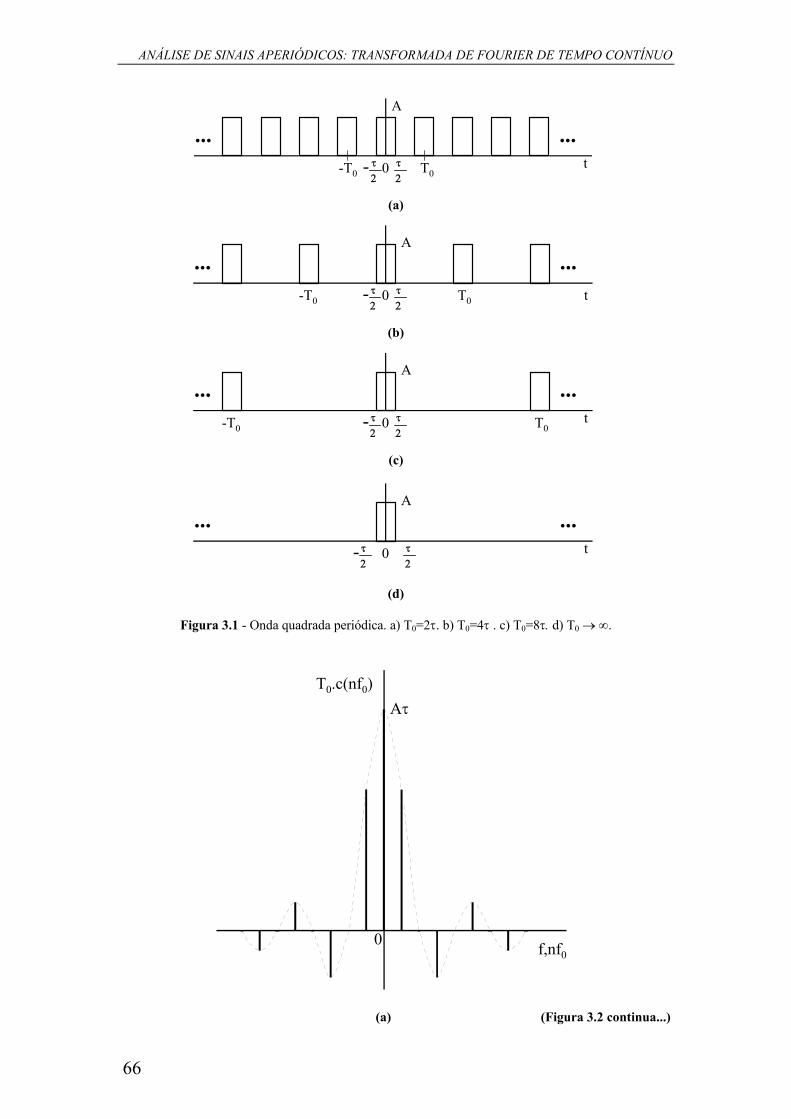
ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
66
0 T0-T0t
-
... ...
A
(a)
T0 -T0 0
-
......t
A
(b)
0
- T0 -T0
......t
A
(c)
0
-
......t
A
(d)
Figura 3.1 - Onda quadrada periódica. a) T0=2. b) T0=4 . c) T0=8d) T0 .
f,nf0
T0.c(nf0)
A
0
(a) (Figura 3.2 continua...)
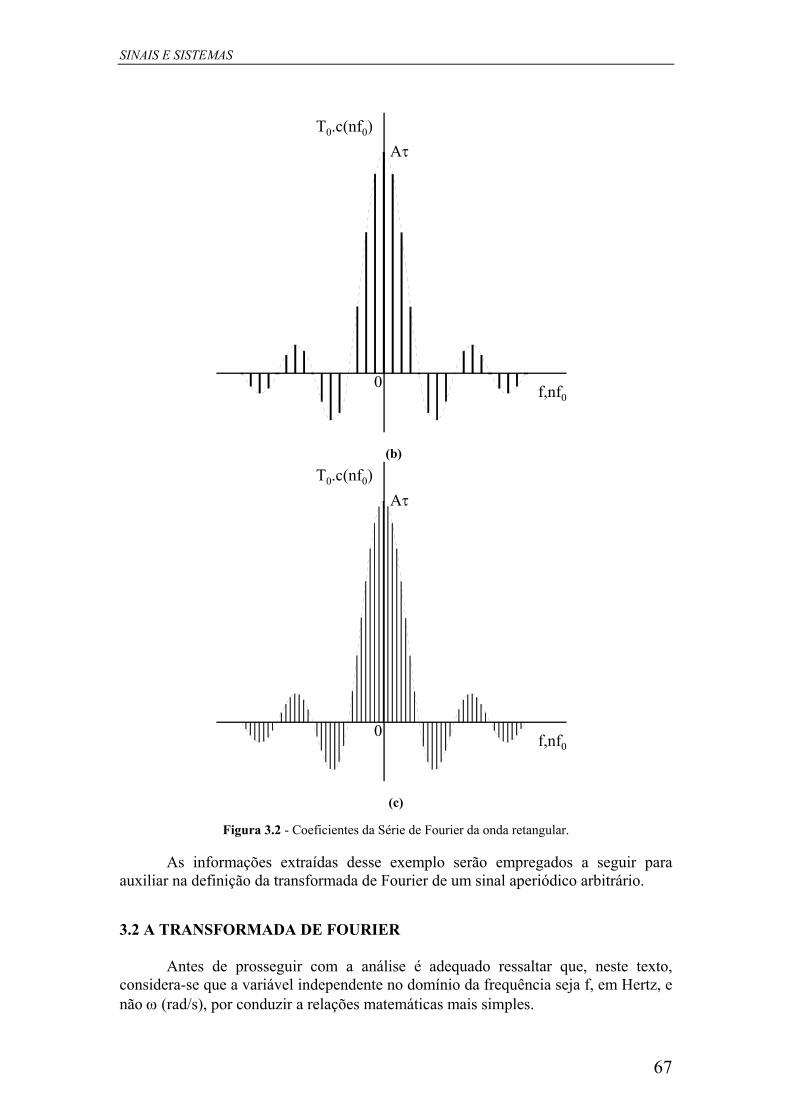
SINAIS E SISTEMAS
67
A
f,nf0 0
T0.c(nf0)
(b)
A
f,nf0 0
T0.c(nf0)
(c)
Figura 3.2 - Coeficientes da Série de Fourier da onda retangular.
As informações extraídas desse exemplo serão empregados a seguir para auxiliar na definição da transformada de Fourier de um sinal aperiódico arbitrário.
3.2 A TRANSFORMADA DE FOURIER
Antes de prosseguir com a análise é adequado ressaltar que, neste texto, considera-se que a variável independente no domínio da frequência seja f, em Hertz, e não (rad/s), por conduzir a relações matemáticas mais simples.
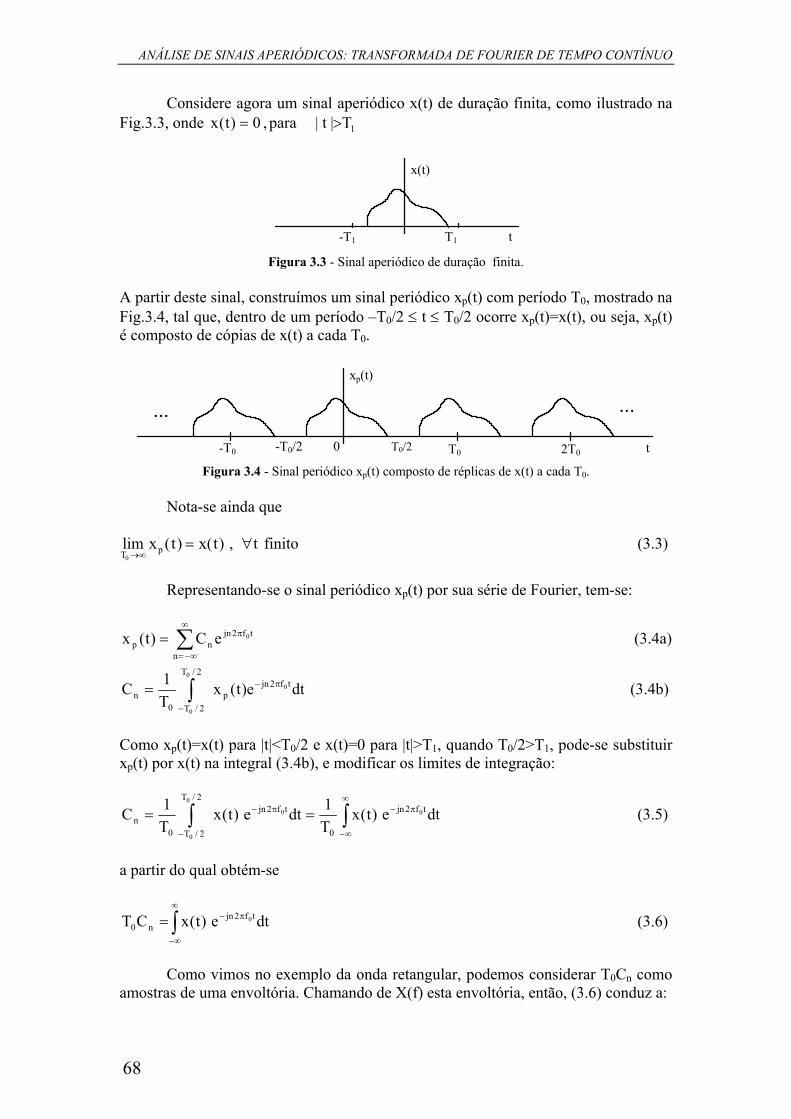
ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
68
Considere agora um sinal aperiódico x(t) de duração finita, como ilustrado na Fig.3.3, onde 1T|t|para,0)t(x
t
x(t)
T1-T1
Figura 3.3 - Sinal aperiódico de duração finita. A partir deste sinal, construímos um sinal periódico xp(t) com período T0, mostrado na Fig.3.4, tal que, dentro de um período –T0/2 t T0/2 ocorre xp(t)=x(t), ou seja, xp(t) é composto de cópias de x(t) a cada T0.
t
......
T0 2T0-T0
xp(t)
T0/2-T0/2 0
Figura 3.4 - Sinal periódico xp(t) composto de réplicas de x(t) a cada T0.
Nota-se ainda que lim ( ) ( ) ,T
px t x t t finito0
(3.3)
Representando-se o sinal periódico xp(t) por sua série de Fourier, tem-se:
n
tf2jnnp
0eC)t(x (3.4a)
2/T
2/T
tf2jnp
0n
0
0
0 dte)t(xT
1C (3.4b)
Como xp(t)=x(t) para |t|<T0/2 e x(t)=0 para |t|>T1, quando T0/2>T1, pode-se substituir xp(t) por x(t) na integral (3.4b), e modificar os limites de integração:
dte)t(xT
1dte)t(x
T
1C tf2jn
0
2/T
2/T
tf2jn
0n
0
0
0
0 (3.5)
a partir do qual obtém-se
dte)t(xCT tf2jnn0
0 (3.6)
Como vimos no exemplo da onda retangular, podemos considerar T0Cn como
amostras de uma envoltória. Chamando de X(f) esta envoltória, então, (3.6) conduz a:

SINAIS E SISTEMAS
69
dte)t(x)f(X tf2j (3.7)
cujos coeficientes Cn em (3.5) tornam-se:
)nf(XT
1C 0
0n (3.8)
e, de (3.4a):
n
tf2jn0
0n
tf2jnnp
00 e)nf(XT
1eC)t(x (3.9)
Como 00 T/1f , (3.9) se converte em
0n
tf2jn0p fe)nf(X)t(x 0
(3.10)
Fazendo o limite para T0 tendendo a infinito, tem-se que:
a) xp(t) tende a x(t); b) f0 tende a df; c) nf0 tende a f; d) a somatória tende a uma integral. e, portanto, (3.10) conduz a:
dfe)f(X)t(x ft2j (3.11)
onde
dte)t(x)f(X ft2j (3.12)
A equação (3.12) é a equação de análise da transformada de Fourier, ou
simplesmente a transformada de Fourier do sinal x(t), enquanto que (3.11) é a equação de síntese da transformada de Fourier, ou a transformada de Fourier inversa. Tem-se portanto um par transformado, normalmente representado simbolicamente por:
)f(X)t(x (3.13)
A transformada de Fourier X(f) fornece a informação da contribuição de cada componente de frequência, em módulo e fase, para o sinal x(t). Na série de Fourier,
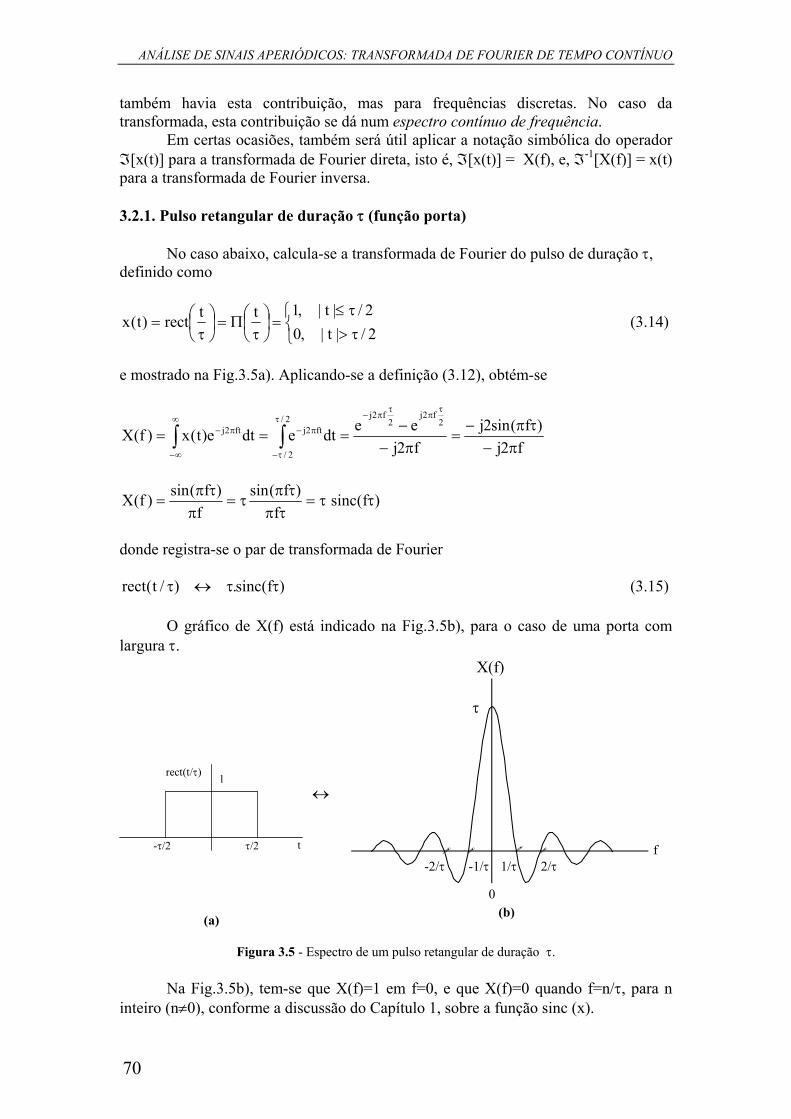
ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
70
também havia esta contribuição, mas para frequências discretas. No caso da transformada, esta contribuição se dá num espectro contínuo de frequência.
Em certas ocasiões, também será útil aplicar a notação simbólica do operador [x(t)] para a transformada de Fourier direta, isto é, [x(t)] = X(f), e, -1[X(f)] = x(t) para a transformada de Fourier inversa. 3.2.1. Pulso retangular de duração (função porta) No caso abaixo, calcula-se a transformada de Fourier do pulso de duração , definido como
2/|t|,0
2/|t|,1ttrect)t(x (3.14)
e mostrado na Fig.3.5a). Aplicando-se a definição (3.12), obtém-se
f2j
)f(sin2j
f2j
eedtedte)t(x)f(X
2f2j
2f2j2/
2/
ft2jft2j
)f(sincf
)f(sin
f
)f(sin)f(X
donde registra-se o par de transformada de Fourier
)f(sinc.)/t(rect (3.15)
O gráfico de X(f) está indicado na Fig.3.5b), para o caso de uma porta com largura .
/2-/2
1
t
rect(t/)
(a)
X(f)
0
1/-1/ 2/-2/f
(b)
Figura 3.5 - Espectro de um pulso retangular de duração .
Na Fig.3.5b), tem-se que X(f)=1 em f=0, e que X(f)=0 quando f=n/, para n
inteiro (n0), conforme a discussão do Capítulo 1, sobre a função sinc (x).
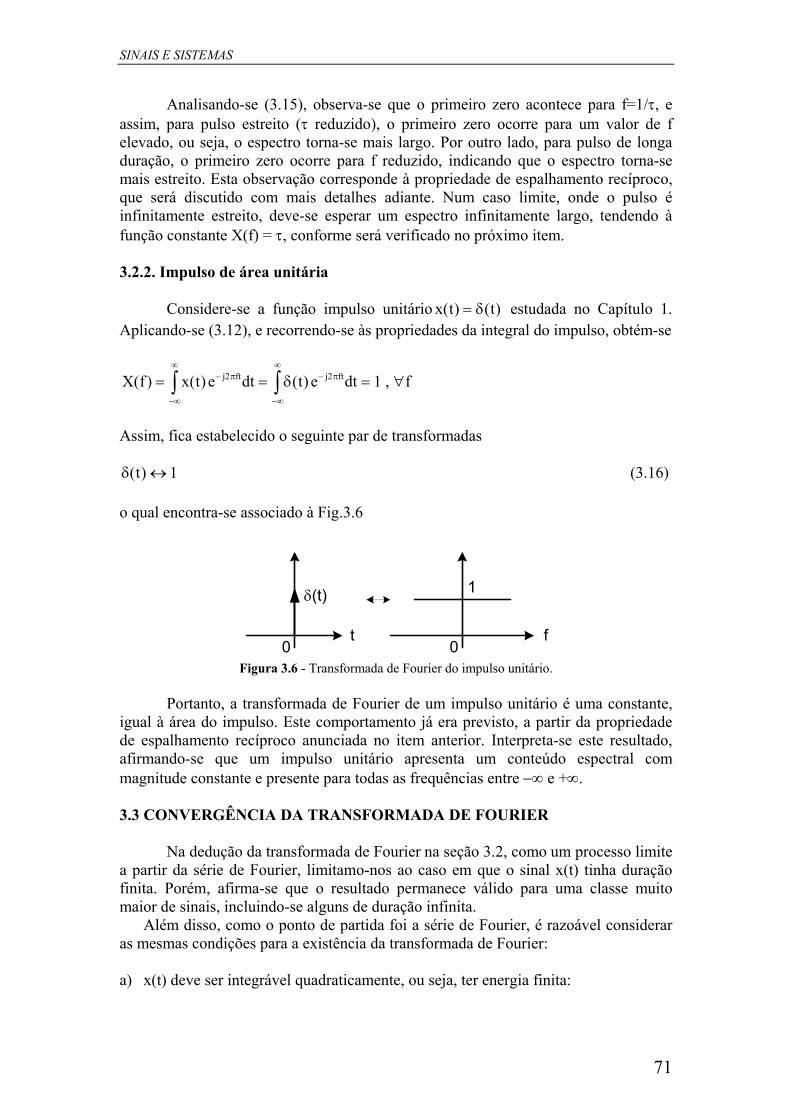
SINAIS E SISTEMAS
71
Analisando-se (3.15), observa-se que o primeiro zero acontece para f=1/, e assim, para pulso estreito ( reduzido), o primeiro zero ocorre para um valor de f elevado, ou seja, o espectro torna-se mais largo. Por outro lado, para pulso de longa duração, o primeiro zero ocorre para f reduzido, indicando que o espectro torna-se mais estreito. Esta observação corresponde à propriedade de espalhamento recíproco, que será discutido com mais detalhes adiante. Num caso limite, onde o pulso é infinitamente estreito, deve-se esperar um espectro infinitamente largo, tendendo à função constante X(f) = , conforme será verificado no próximo item.
3.2.2. Impulso de área unitária
Considere-se a função impulso unitário x t t( ) ( ) estudada no Capítulo 1. Aplicando-se (3.12), e recorrendo-se às propriedades da integral do impulso, obtém-se
X f x t e dt t e dt fj ft j ft( ) ( ) ( ) ,
2 2 1
Assim, fica estabelecido o seguinte par de transformadas
1)t( (3.16) o qual encontra-se associado à Fig.3.6
t f0 0
1(t)
Figura 3.6 - Transformada de Fourier do impulso unitário.
Portanto, a transformada de Fourier de um impulso unitário é uma constante, igual à área do impulso. Este comportamento já era previsto, a partir da propriedade de espalhamento recíproco anunciada no item anterior. Interpreta-se este resultado, afirmando-se que um impulso unitário apresenta um conteúdo espectral com magnitude constante e presente para todas as frequências entre e +. 3.3 CONVERGÊNCIA DA TRANSFORMADA DE FOURIER
Na dedução da transformada de Fourier na seção 3.2, como um processo limite a partir da série de Fourier, limitamo-nos ao caso em que o sinal x(t) tinha duração finita. Porém, afirma-se que o resultado permanece válido para uma classe muito maior de sinais, incluindo-se alguns de duração infinita.
Além disso, como o ponto de partida foi a série de Fourier, é razoável considerar as mesmas condições para a existência da transformada de Fourier: a) x(t) deve ser integrável quadraticamente, ou seja, ter energia finita:
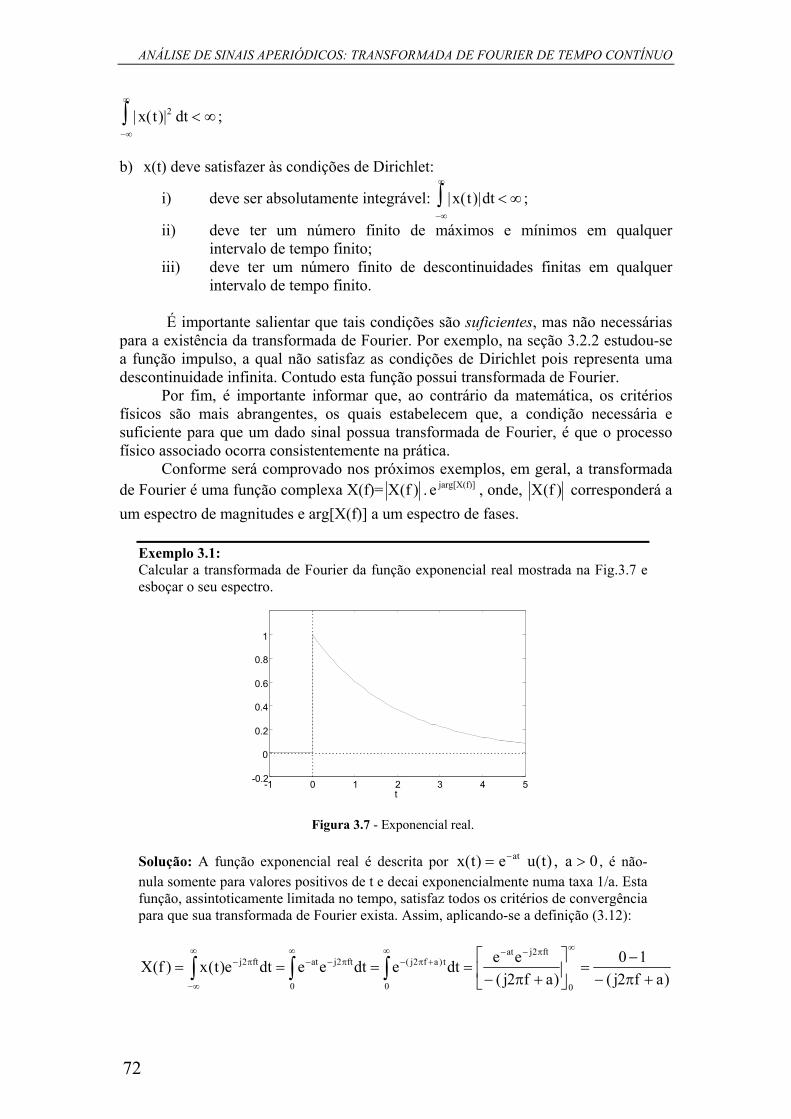
ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
72
| ( )|x t dt2
;
b) x(t) deve satisfazer às condições de Dirichlet:
i) deve ser absolutamente integrável: | ( )|x t dt
;
ii) deve ter um número finito de máximos e mínimos em qualquer intervalo de tempo finito;
iii) deve ter um número finito de descontinuidades finitas em qualquer intervalo de tempo finito.
É importante salientar que tais condições são suficientes, mas não necessárias
para a existência da transformada de Fourier. Por exemplo, na seção 3.2.2 estudou-se a função impulso, a qual não satisfaz as condições de Dirichlet pois representa uma descontinuidade infinita. Contudo esta função possui transformada de Fourier.
Por fim, é importante informar que, ao contrário da matemática, os critérios físicos são mais abrangentes, os quais estabelecem que, a condição necessária e suficiente para que um dado sinal possua transformada de Fourier, é que o processo físico associado ocorra consistentemente na prática.
Conforme será comprovado nos próximos exemplos, em geral, a transformada de Fourier é uma função complexa X(f)= )f(X . arg[X(f)]je , onde, )f(X corresponderá a
um espectro de magnitudes e arg[X(f)] a um espectro de fases. Exemplo 3.1: Calcular a transformada de Fourier da função exponencial real mostrada na Fig.3.7 e esboçar o seu espectro.
-1 0 1 2 3 4 5-0.2
0
0.2
0.4
0.6
0.8
1
t
Figura 3.7 - Exponencial real.
Solução: A função exponencial real é descrita por x t e u t aat( ) ( ) , 0, é não-nula somente para valores positivos de t e decai exponencialmente numa taxa 1/a. Esta função, assintoticamente limitada no tempo, satisfaz todos os critérios de convergência para que sua transformada de Fourier exista. Assim, aplicando-se a definição (3.12):
)af2j(
10
)af2j(
eedtedteedte)t(x)f(X
0
ft2jat
0
t)af2j(
0
ft2jatft2j
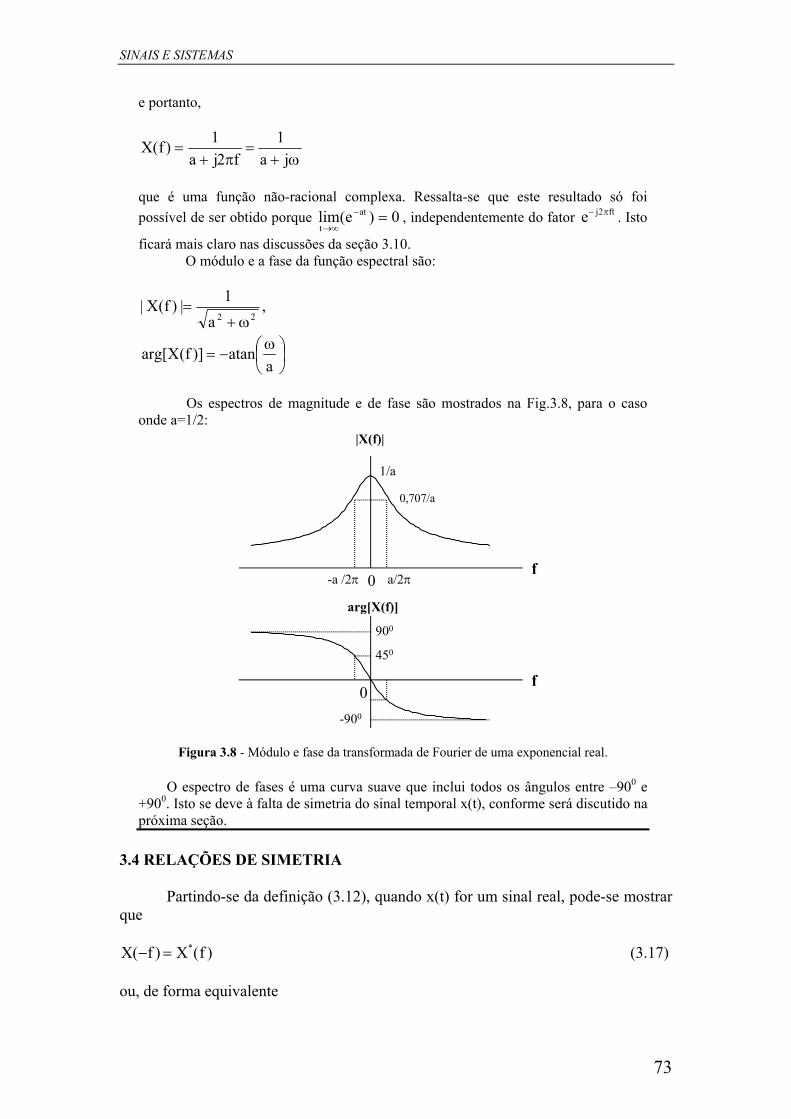
SINAIS E SISTEMAS
73
e portanto,
X fa j f a j
( )
1
2
1
que é uma função não-racional complexa. Ressalta-se que este resultado só foi
possível de ser obtido porque 0)e(lim at
t
, independentemente do fator ft2je . Isto
ficará mais claro nas discussões da seção 3.10. O módulo e a fase da função espectral são:
,a
1|)f(X|
22
aatan)]f(Xarg[
Os espectros de magnitude e de fase são mostrados na Fig.3.8, para o caso
onde a=1/2: |X(f)|
1/a
f
f
0
0
-900
900
arg[X(f)]
450
a/2-a /2
0,707/a
Figura 3.8 - Módulo e fase da transformada de Fourier de uma exponencial real. O espectro de fases é uma curva suave que inclui todos os ângulos entre –900 e +900. Isto se deve à falta de simetria do sinal temporal x(t), conforme será discutido na próxima seção.
3.4 RELAÇÕES DE SIMETRIA
Partindo-se da definição (3.12), quando x(t) for um sinal real, pode-se mostrar que X f X f( ) ( )* (3.17) ou, de forma equivalente

ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
74
X f X f*( ) ( ) (3.18) isto é, a transformada de Fourier (ou seja, o espectro) exibe simetria Hermitiana.
Se X(f) for expresso em termos de suas partes real e imaginária, obtém-se: X f X f j X f( ) Re{ ( )} Im{ ( )} (3.19) então X f X f j X f*( ) Re{ ( )} Im{ ( )} (3.20) ou seja Re{ ( )} Re{ ( )}Im{ ( )} Im{ ( )}
X f X fX f X f
(3.21)
Observa-se, portanto, que a parte real da transformada de Fourier é uma função par, enquanto que a parte imaginária é uma função ímpar na variável f.
Por outro lado, expressando X(f) na forma polar:
)]f(Xarg[je|)f(X|)f(X (3.22) observa-se que
| ( )| Re{ ( )} Im{ ( )} | ( )|/
X f X f X f X f 2 2 1 2 (3.23)
)]f(Xarg[)}f(XRe{
)}f(XIm{atan)]f(Xarg[ (3.24)
Como
)]f(Xarg[j* e|)f(X|)f(X (3.25) conclui-se que o espectro de magnitudes (módulo) é uma função par e o espectro de fases é uma função ímpar.
Considera-se agora um sinal x(t) arbitrário (pode ser complexo). Do Capítulo 1 sabemos que este sinal pode ser expresso como soma de uma função par (xe) e de uma função ímpar (xo) de t: x t x t x te o( ) ( ) ( ) (3.26) onde
x tx t x t
e ( )( ) ( )*
2 (3.27a)
x tx t x t
o ( )( ) ( )*
2 (3.27b)

SINAIS E SISTEMAS
75
Assim, têm-se as seguintes relações
)}f(XRe{)f(X)t(x ee (3.28a)
)}f(XIm{j)f(X)t(x oo (3.28b)
Porém, a partir de (3.12), para sinais x(t) reais
dt)ft2sen().t(xjdt)ft2cos().t(x)f(X
=Re{X(f)}+ j Im{X(f)}
e, com isso,
dt)ft2cos().t(x)f(X)t(x ee
(3.29a)
d)ft2sen().t(xj)f(X)t(x oo
(3.29b)
No caso onde x(t) tem simetria par, tal que x(-t)=x(t), então, x(t).cos(2ft) é par, enquanto que x(t).sen(2ft) é ímpar e, portanto, Xo(f)=0, e
dt)ft2cos().t(x2)f(X)f(X0e
(3.30)
Conclui-se que, se x(t) for par e puramente real, seu espectro X(f) também será puramente real. Este resultado está de acordo com o espectro obtido para a função porta.
Por outro lado, se x(t) tem simetria ímpar, tal que x(-t) = - x(t), então, Xe(f)=0, e
dt)ft2sen().t(x2j)f(X)f(X0o
(3.31)
Assim, se x(t) for ímpar e puramente real, seu espectro X(f) será puramente imaginário.
Em casos onde x(t) não for nem par nem ímpar, o espectro X(f) terá partes real e imaginária simultaneamente, conforme aquele obtido no exemplo 3.1.
3.5 TEOREMA DE PARSEVAL O teorema de Parseval estabelece que, se x1(t) e x2(t) são sinais de energia arbitrários, com transformadas de Fourier X1(f) e X2(f), respectivamente, então
x t x t dt X f X f df1 2 1 2( ) ( ) ( ) ( )* *
(3.32)
sendo a prova do teorema deixada como exercício para o leitor.
No caso particular, onde x1(t)=x2(t)=x(t), então (3.32) conduz a

ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
76
| ( )| | ( )|x t dt E X f dfx2 2
(3.33)
onde Ex é a energia de x(t), como visto no Capítulo 1. Ou seja, sendo x(t) um sinal de energia, sua energia pode ser obtida através da integração de |x(t)|2, no domínio do tempo, ou de |X(f)|2, no domínio da frequência, conforme seja mais conveniente.
A função |X(f)|2 é chamada de densidade espectral de energia de x(t), e fornece a informação da energia por unidade de frequência ao longo do espectro de X(f). Uma análise detalhada da função densidade espectral de energia será apresentada no Capítulo 4.
Exemplo 3.2: Obter a densidade espectral de energia do pulso retangular de largura e amplitude A, x(t)=A.rect(t/). Solução: Utilizando-se o resultado da seção 3.2.1, verifica-se que o espectro desse pulso retangular é dado por )f(sincA)f(X . Na Fig.3.9 ilustra-se o gráfico de de |X(f)|2.
0 1/-1/ 2/-2/f
|X(f)|2
2
Figura 3.9 - Densidade espectral de energia do pulso retangular.
A Fig. 3.9 revela que a maior parte da energia do pulso encontra-se dentro da banda f < 1/. De fato, calculando-se a energia nessa banda, tem-se
/1
/1
222/1
/1
2.A92,0df).f(sinc)A(df)f(X
cujo resultado demanda um cálculo numérico.
O gráfico da Fig.3.5 indica que, em princípio, a largura espectral do pulso retangular de largura é infinita, uma vez que X(f) existe entre e +, embora sua amplitude decaia gradativamente com f. Contudo, o exemplo anterior mostrou que a energia do pulso, calculada na banda f < 1/ , vale 0,92 A2. Por outro lado, a energia total do pulso é
22x Adt|)t(x|E
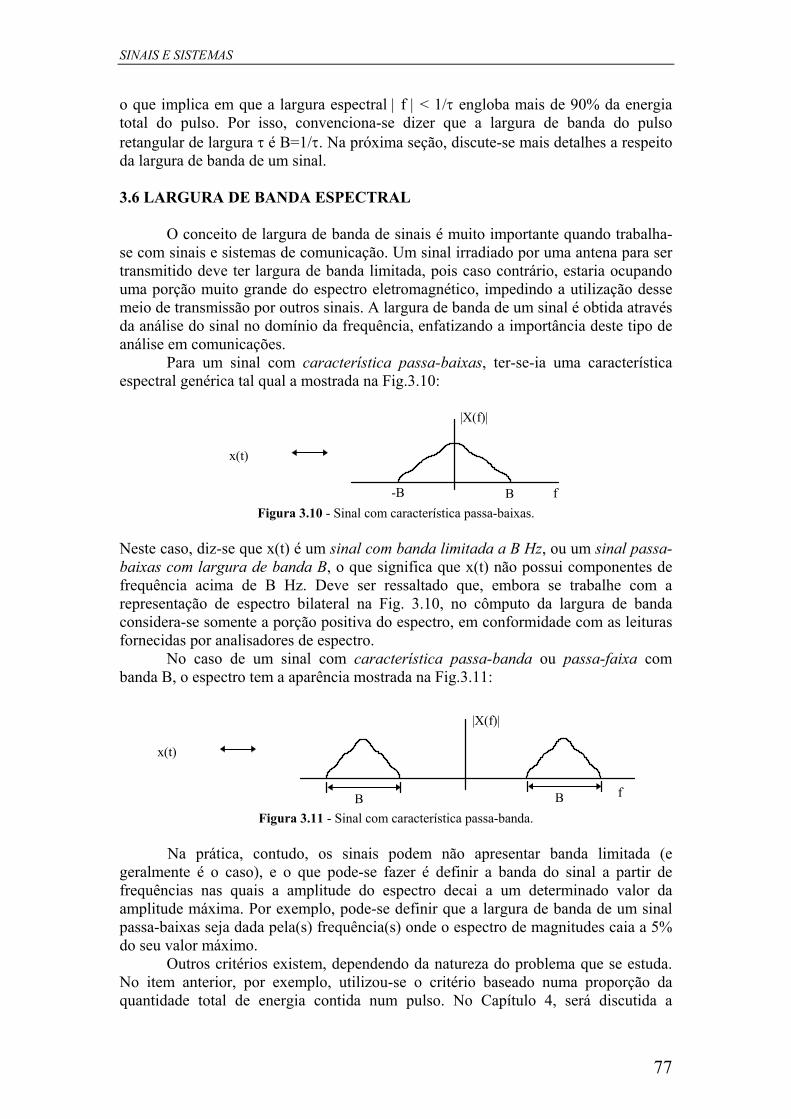
SINAIS E SISTEMAS
77
o que implica em que a largura espectral f < 1/ engloba mais de 90% da energia total do pulso. Por isso, convenciona-se dizer que a largura de banda do pulso retangular de largura é B=1/. Na próxima seção, discute-se mais detalhes a respeito da largura de banda de um sinal. 3.6 LARGURA DE BANDA ESPECTRAL
O conceito de largura de banda de sinais é muito importante quando trabalha-se com sinais e sistemas de comunicação. Um sinal irradiado por uma antena para ser transmitido deve ter largura de banda limitada, pois caso contrário, estaria ocupando uma porção muito grande do espectro eletromagnético, impedindo a utilização desse meio de transmissão por outros sinais. A largura de banda de um sinal é obtida através da análise do sinal no domínio da frequência, enfatizando a importância deste tipo de análise em comunicações.
Para um sinal com característica passa-baixas, ter-se-ia uma característica espectral genérica tal qual a mostrada na Fig.3.10:
B-B f
|X(f)|
x(t)
Figura 3.10 - Sinal com característica passa-baixas.
Neste caso, diz-se que x(t) é um sinal com banda limitada a B Hz, ou um sinal passa-baixas com largura de banda B, o que significa que x(t) não possui componentes de frequência acima de B Hz. Deve ser ressaltado que, embora se trabalhe com a representação de espectro bilateral na Fig. 3.10, no cômputo da largura de banda considera-se somente a porção positiva do espectro, em conformidade com as leituras fornecidas por analisadores de espectro.
No caso de um sinal com característica passa-banda ou passa-faixa com banda B, o espectro tem a aparência mostrada na Fig.3.11:
B f
|X(f)|
x(t)
B Figura 3.11 - Sinal com característica passa-banda.
Na prática, contudo, os sinais podem não apresentar banda limitada (e
geralmente é o caso), e o que pode-se fazer é definir a banda do sinal a partir de frequências nas quais a amplitude do espectro decai a um determinado valor da amplitude máxima. Por exemplo, pode-se definir que a largura de banda de um sinal passa-baixas seja dada pela(s) frequência(s) onde o espectro de magnitudes caia a 5% do seu valor máximo.
Outros critérios existem, dependendo da natureza do problema que se estuda. No item anterior, por exemplo, utilizou-se o critério baseado numa proporção da quantidade total de energia contida num pulso. No Capítulo 4, será discutida a
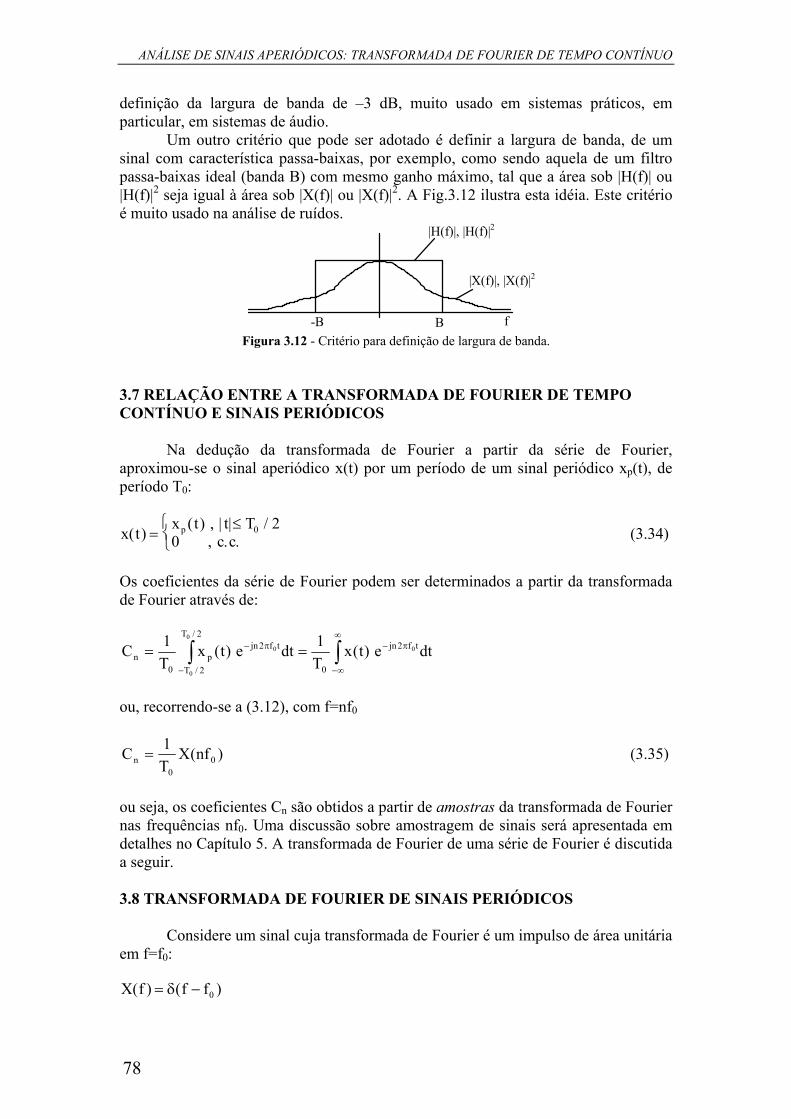
ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
78
definição da largura de banda de –3 dB, muito usado em sistemas práticos, em particular, em sistemas de áudio.
Um outro critério que pode ser adotado é definir a largura de banda, de um sinal com característica passa-baixas, por exemplo, como sendo aquela de um filtro passa-baixas ideal (banda B) com mesmo ganho máximo, tal que a área sob |H(f)| ou |H(f)|2 seja igual à área sob |X(f)| ou |X(f)|2. A Fig.3.12 ilustra esta idéia. Este critério é muito usado na análise de ruídos.
B-B f
|H(f)|, |H(f)|2
|X(f)|, |X(f)|2
Figura 3.12 - Critério para definição de largura de banda.
3.7 RELAÇÃO ENTRE A TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO E SINAIS PERIÓDICOS
Na dedução da transformada de Fourier a partir da série de Fourier, aproximou-se o sinal aperiódico x(t) por um período de um sinal periódico xp(t), de período T0:
x tx t t| T
c cp( )( ) , | /
, . .
0 20 (3.34)
Os coeficientes da série de Fourier podem ser determinados a partir da transformada de Fourier através de:
dte)t(xT
1dte)t(x
T
1C tf2jn
0
2/T
2/T
tf2jnp
0n
0
0
0
0
ou, recorrendo-se a (3.12), com f=nf0
)nf(XT
1C 0
0n (3.35)
ou seja, os coeficientes Cn são obtidos a partir de amostras da transformada de Fourier nas frequências nf0. Uma discussão sobre amostragem de sinais será apresentada em detalhes no Capítulo 5. A transformada de Fourier de uma série de Fourier é discutida a seguir. 3.8 TRANSFORMADA DE FOURIER DE SINAIS PERIÓDICOS
Considere um sinal cuja transformada de Fourier é um impulso de área unitária em f=f0: X f f f( ) ( ) 0

SINAIS E SISTEMAS
79
então o sinal no tempo, x(t), é obtido a partir da equação de síntese (3.11):
x t f f e df e t jsin tj f t j f t( ) ( ) cos
0
2 20 0
0
ou seja, x(t) é um sinal periódico com período T0=1/f0. Este resultado permite estabelecer mais um par de transformada de Fourier:
)ff(e 0tf2j 0 (3.36)
Generalizando para uma combinação de impulsos de áreas Cn, localizados em
f=nf0:
n
0n )nff(C)f(X
fica-se com
n
tnf2jn
0eC)t(x
e, consequentemente, com um novo par de transformada de Fourier
)nff(CeC 0n
nn
tnf2jn
0
(3.37)
Identifica-se no lado esquerdo de (3.37) como a representação em termos da série de Fourier do sinal periódico x(t). Assim, a transformada de Fourier de um sinal periódico, cujos coeficientes da série de Fourier são iguais a Cn , é igual a um trem de impulsos de áreas Cn localizados nas frequências nf0.
Conforme visto no Capítulo 2, associado à série de Fourier tem-se um espectro de linhas (unilateral ou bilateral), o qual constitui uma representação de frequências discretas. Por exemplo, entre a componente espectral em f0, com amplitude C1=c(f0), e a componente em 2.f0, com amplitude C2=c(2f0), simplesmente não se define o espectro. O resultado (3.37) informa que esse espectro de linhas deve ser automaticamente convertido num espectro compostos por impulsos, segundo uma representação de “frequências contínuas”. Assim, ao longo de todo o intervalo entre a frequência f0, onde existe um impulso com área C1=c(f0), e a frequência 2.f0, onde existe um impulso com área C2=c(2f0), considera-se que o espectro seja definido, porém, que tenha amplitude igual a zero.
Exemplo 3.3: Considere uma onda quadrada de frequência f0, tal qual aquela mostrada na Fig.3.1, e cujos coeficientes Cn da série de Fourier são dados por:
2
1f,
n
)fn(sinC 0
0n
Determinar a transformada de Fourier da sua série de Fourier

ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
80
Solução: Os coeficiente da série de Fourier podem ser rescritos como
)2n(sinc
2
1
n2
nsinCn
e portanto, basta aplicar (3.37) para obter a transformada de Fourier:
n
0 )nff()2n(sinc
2
1)f(X
Exemplo 3.4: Obter a transformada de Fourier do trem de impulsos com período T0 cuja série de Fourier é dada por
n
tnf2j
0n0T
0eT
1)nTt()t(rep)t(x
Solução: Aplicando-se (3.37), com Cn=1, e sabendo-se que T0=1/f0, obtém-se
X fT
f kf f f kfk k
( ) ( ) ( ) 1
00 0 0
onde os gráficos de x(t) e X(f) estão na Fig.3.13
f0-f0 f2f0-2f0
...... f0
T0-T0 t2T0-2T0
...... 1
Figura 3.13 - Transformada de Fourier de um trem de impulsos.
Portanto a transformada de Fourier de um trem de impulsos de áreas unitárias
espaçados de T0 é igual a outro trem de impulsos, com áreas f0=1/T0 e espaçados de f0. Este sinal será importante quando estudarmos a amostragem de sinais.
3.8.1 Transformada de Fourier de seno e co-seno eternos
Considere o sinal senoidal eterno, definido por tcos.A)t(x 0 . Recorrendo-
se à representação em termos de exponenciais complexas:
2
e.A
2
e.A
2
ee.A]tcos.A[)f(X
tjtjtjtj
0
0000
e assim, aplicando-se (3.36) e (3.37) obtém-se
)ff()ff(2
A)f(X 00 (3.38)
cujo diagrama espectral encontra-se desenhado na Fig.3.14

SINAIS E SISTEMAS
81
f0-f0
A/2A/2
f
A cos 0 t
Figura 3.14 - Diagrama espectral da função co-seno
Intuitivamente, este resultado era previsível, pois o espectro de um co-seno de
frequência f0 é composto por uma única linha em f0, a qual deve ser substituída por um impulso no diagrama espectral de frequências contínuas.
Por outro lado, no caso da função seno, ou seja, tsin.A)t(x 0 , tem-se
j2
ee.A]tsin.A[)f(X
tjtj
0
00
a partir da qual, determina-se que
)ff()ff(j2
A)f(X 00 (3.39)
e cujo diagrama espectral encontra-se desenhado na Fig.3.15. Como o espectro é imaginário puro, excepcionalmente, não desenhamos o espectro na forma de magnitude e fase.
f0
-f0
-A/2j
A/2j
f
A sin 0 t
Figura 3.15 - Diagrama espectral da função seno.
3.9 PROPRIEDADES DA TRANSFORMADA DE FOURIER
A transformada de Fourier é uma ferramenta muito valiosa na análise de sinais e sistemas no domínio da frequência, fornecendo a informação de como é a dependência do sinal com a frequência. Às vezes, nos deparamos com sinais ou funções cujas transformadas de Fourier segundo (3.12) são difíceis de serem calculadas, devido à complexidade da integral envolvida. As propriedades descritas a seguir são muito úteis para auxiliar no cálculo de transformadas de Fourier diretas e inversas de sinais mais complexos, facilitando portanto a observação das relações entre os sinais nos domínios do tempo e frequência. A maior parte delas serão apenas enunciadas, deixando-se suas demonstrações por conta do leitor, como exercícios de fixação.
Para a discussão dos próximos itens, considere os pares transformados abaixo: x t X f( ) ( ) (3.40a) x t X f1 1( ) ( ) (3.40b) x t X f2 2( ) ( ) (3.40c)
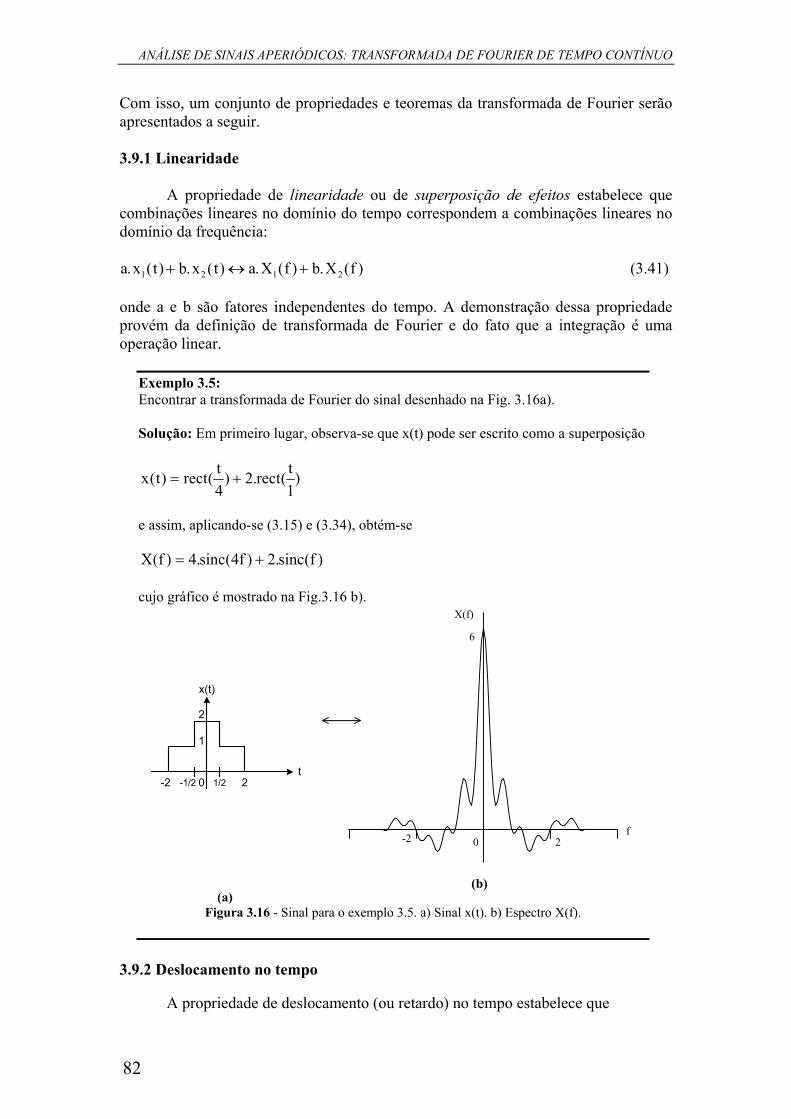
ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
82
Com isso, um conjunto de propriedades e teoremas da transformada de Fourier serão apresentados a seguir. 3.9.1 Linearidade A propriedade de linearidade ou de superposição de efeitos estabelece que combinações lineares no domínio do tempo correspondem a combinações lineares no domínio da frequência: a x t b x t a X f b X f. ( ) . ( ) . ( ) . ( )1 2 1 2 (3.41) onde a e b são fatores independentes do tempo. A demonstração dessa propriedade provém da definição de transformada de Fourier e do fato que a integração é uma operação linear.
Exemplo 3.5: Encontrar a transformada de Fourier do sinal desenhado na Fig. 3.16a). Solução: Em primeiro lugar, observa-se que x(t) pode ser escrito como a superposição
)1
t(rect.2)
4
t(rect)t(x
e assim, aplicando-se (3.15) e (3.34), obtém-se
)f(sinc.2)f4(sinc.4)f(X cujo gráfico é mostrado na Fig.3.16 b).
0 2-2t
x(t)
1
2
1/2-1/2
(a)
6
0 2-2f
X(f)
(b)
Figura 3.16 - Sinal para o exemplo 3.5. a) Sinal x(t). b) Espectro X(f).
3.9.2 Deslocamento no tempo A propriedade de deslocamento (ou retardo) no tempo estabelece que

SINAIS E SISTEMAS
83
x t t e X fj ft( ) ( ) 0
2 0 (3.42) Ou seja, à um deslocamento no tempo está associado um deslocamento de fase linear do espectro do sinal original. A magnitude do espectro, porém, não é alterada.
Exemplo 3.6: Calcular a transformada de Fourier do sinal mostrado na Fig.3.17
A
-A 0
t
z(t)
Figura 3.17 - Sinal z(t) para o exemplo 3.6. Solução: Esse cálculo pode ser realizado com facilidade empregando-se as propriedades apresentadas e a transformada de Fourier da porta de largura ,
)/t(rect.A)t(x analisada na seção 3.2.1. Para isto, basta verificar que
)2/t(x)2/t(x)t(z Portanto, aplicando-se as propriedades de linearidade e deslocamento no tempo
)f(X).fsen(.2j
e).f(Xe).f(X)f(Z 2/tf2j2/tf2j
Recorrendo-se à expressão da transformada de Fourier de x(t), equação (3.15), e procedendo às simplificações, obtém-se
)f(sinc.A).f2j()f(Z 2 .
3.9.3 Teorema da dualidade ou da simetria O teorema da dualidade provém da similaridade das integrais das transformadas de Fourier direta e inversa, e estabelece que, se x t X f( ) ( ) , então X t x f( ) ( ) (3.43) Ou seja, existe uma dualidade entre os domínios do tempo e da frequência. O teorema se prova permutando-se t e f nas integrais de Fourier (3.10) e (3.12).
Exemplo 3.7: Obter a transformada de Fourier de )wt2(sinc.A)t(z , onde A e w são constantes, e cujo gráfico está mostrado na Fig.3.18 a).
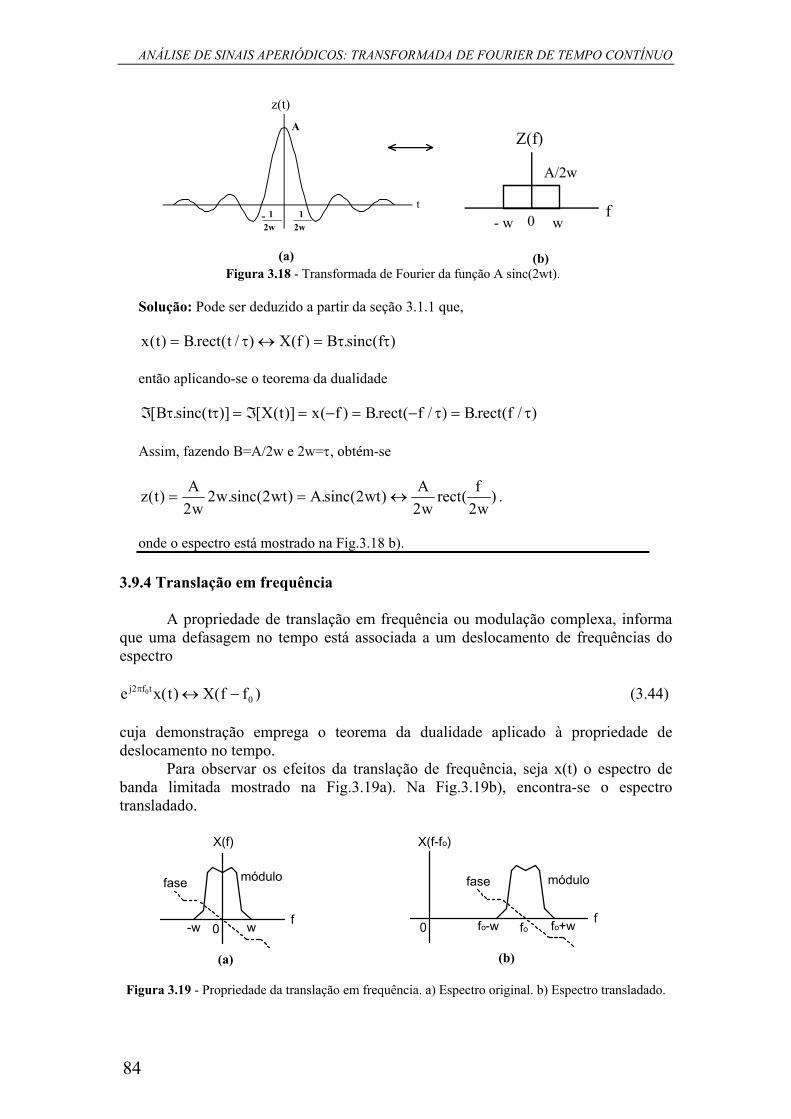
ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
84
z(t)
A
t
2w
1
2w
1-
(a)
A/2w
0f
Z(f)
w- w
(b)
Figura 3.18 - Transformada de Fourier da função A sinc(2wt). Solução: Pode ser deduzido a partir da seção 3.1.1 que,
)f(sinc.B)f(X)/t(rect.B)t(x então aplicando-se o teorema da dualidade
)/f(rect.B)/f(rect.B)f(x)]t(X[)]t(sinc.B[ Assim, fazendo B=A/2w e 2w=, obtém-se
)w2
f(rect
w2
A)wt2(sinc.A)wt2(sinc.w2
w2
A)t(z .
onde o espectro está mostrado na Fig.3.18 b).
3.9.4 Translação em frequência A propriedade de translação em frequência ou modulação complexa, informa que uma defasagem no tempo está associada a um deslocamento de frequências do espectro e x t X f fj f t2
00 ( ) ( ) (3.44)
cuja demonstração emprega o teorema da dualidade aplicado à propriedade de deslocamento no tempo. Para observar os efeitos da translação de frequência, seja x(t) o espectro de banda limitada mostrado na Fig.3.19a). Na Fig.3.19b), encontra-se o espectro transladado.
X(f)
fw-w 0
módulofase
(a)
X(f-fo)
ffo+wfo-w0
módulofase
fo
(b)
Figura 3.19 - Propriedade da translação em frequência. a) Espectro original. b) Espectro transladado.

SINAIS E SISTEMAS
85
Conforme se observa, embora X(f) tenha largura espectral igual a w, o espectro transladado X(f-f0) tem largura 2w: a porção de frequência negativa de X(f) agora aparece como frequências positivas em X(f-f0). Além disso, como o sinal temporal não é mais real, o espectro X(f-f0) não exibe mais a simetria Hermitiana. 3.9.5 Escalonamento no tempo e frequência A propriedade de mudança de escala estabelece que
x a ta
Xf
a( )
| |
1 , para “a” constante (3.45)
a qual reflete a fenômeno de espalhamento recíproco discutido em seções anteriores. Assim, sinais de curta duração temporal possuem espectros com elevadas larguras de banda, e vice-versa. 3.9.6 Propriedade das áreas Partindo-se das transformadas de Fourier direta e inversa, obtém-se as propriedades das áreas:
X f x t e dt X x t dtj f t( ) ( ) ( ) ( )
2 0 (3.46a)
e
x t X f e df x X f dfj f t( ) ( ) ( ) ( )
2 0 (3.46b)
Isto implica que X(0) corresponde à área sob a função x(t), um resultado
equivalente àquele no caso periódico, onde c(0) é igual ao valor médio de x(t). Por outro lado, que x(0) corresponde à área líquida do espectro X(f). 3.9.7 Diferenciação e Integração no tempo Os efeitos da diferenciação ou integração de um sinal sobre o seu espectro são indicados pelas relações:
)f(X)f2j(dt
)t(xd nn
n
(3.47)
e
)f(2
)0(X)f(X
f2j
1d)(x
t
(3.48)
respectivamente. Como se percebe, a diferenciação enriquece os componentes de altas frequências de um sinal, enquanto a integração suprime os componentes de alta frequência. Isto concorda com observações no domínio do tempo, que estabelecem

ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
86
que a diferenciação acentua as variações no tempo, enquanto as integrações as amenizam.
Exemplo 3.8:
Obter a transformada de Fourier da função pulso triangular )2
t(tri.A)t(w
conforme estudado no Capítulo 1. Solução: O gráfico da função w(t) encontra-se na Fig.3.20 a). Recorrendo-se à função z(t) utilizada no exemplo 3.6, observa-se que
td).(z
1)t(w
w(t)
t0
A
(a)
0 1/-1/ 2/-2/f
X(f)
(b)
Figura 3.20 - Transformada de Fourier do pulso triangular.
Com o auxílio do teorema da integração e do resultado obtido no exemplo 3.6, ou seja,
)f(sinc.A).f2j()f(Z 2 , tem-se
)f(sinc.A)f(Zf2j
11)f(W 2
cujo gráfico está desenhado na Fig.3.20 b).
A transformada de Fourier de certas funções x(t) podem ser determinadas diferenciando-se esta função uma ou mais vezes, até que apareça uma descontinuidade do tipo degrau pela primeira vez. A próxima derivada deverá incluir um impulso nessa descontinuidade. A aplicação da propriedade da diferenciação permitirá a determinação de X(f).
Exemplo 3.9: Avaliar a transformada de Fourier do trapézio x(t) mostrado na Fig.3.21 a).
Solução: Nas Figs. 3.21 b) e c) são mostrados os gráficos das derivadas dx(t)/dt e d2x(t)/dt2 (verificar isto !). Por inspeção, nota-se que
)]bt()at()at()bt([ab
A
dt
xd2
2
e assim, aplicando-se (3.47)
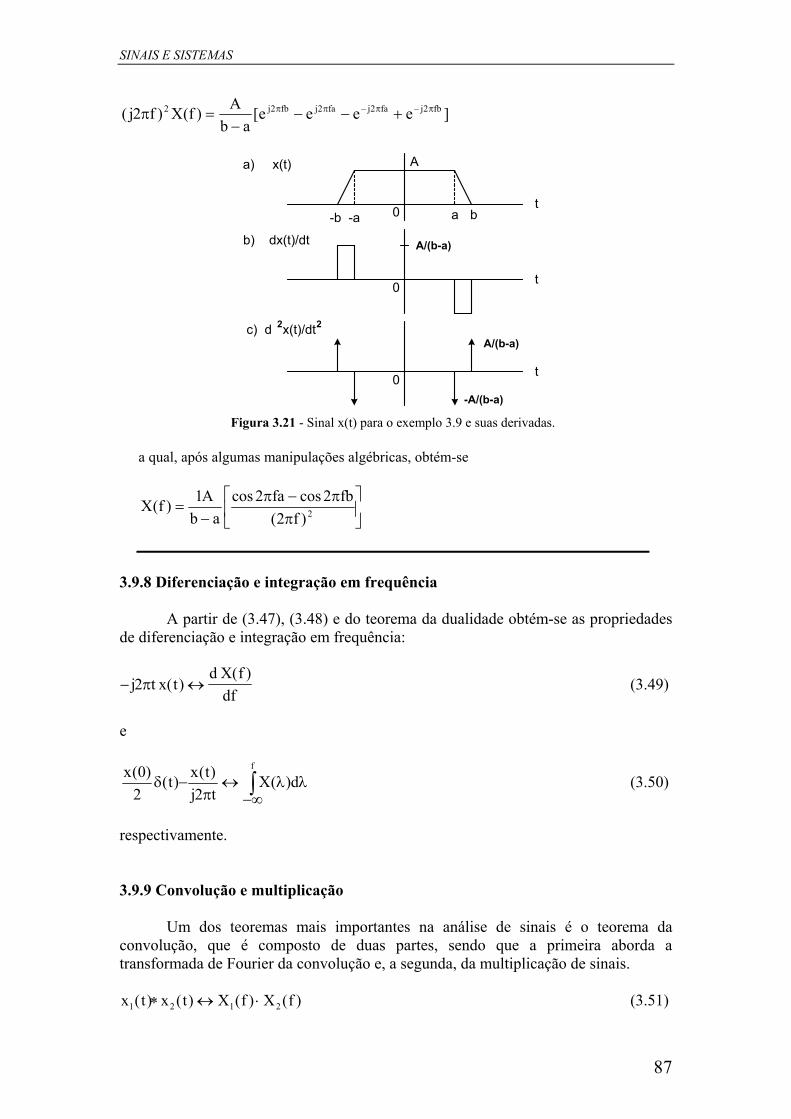
SINAIS E SISTEMAS
87
]eeee[ab
A)f(X)f2j( fb2jfa2jfa2jfb2j2
t
t
t
a) x(t)
b) dx(t)/dt
d x(t)/dt2 2
A
A/(b-a)
A/(b-a)
-A/(b-a)
c)
ba-b -a
0
0
0
Figura 3.21 - Sinal x(t) para o exemplo 3.9 e suas derivadas. a qual, após algumas manipulações algébricas, obtém-se
2)f2(
fb2cosfa2cos
ab
A1)f(X
3.9.8 Diferenciação e integração em frequência A partir de (3.47), (3.48) e do teorema da dualidade obtém-se as propriedades de diferenciação e integração em frequência:
j t x td X f
df2 ( )
( ) (3.49)
e
d)(Xt2j
)t(x)t(
2
)0(x f
(3.50)
respectivamente. 3.9.9 Convolução e multiplicação Um dos teoremas mais importantes na análise de sinais é o teorema da convolução, que é composto de duas partes, sendo que a primeira aborda a transformada de Fourier da convolução e, a segunda, da multiplicação de sinais. x t x t X f X f1 2 1 2( ) ( ) ( ) ( ) (3.51)
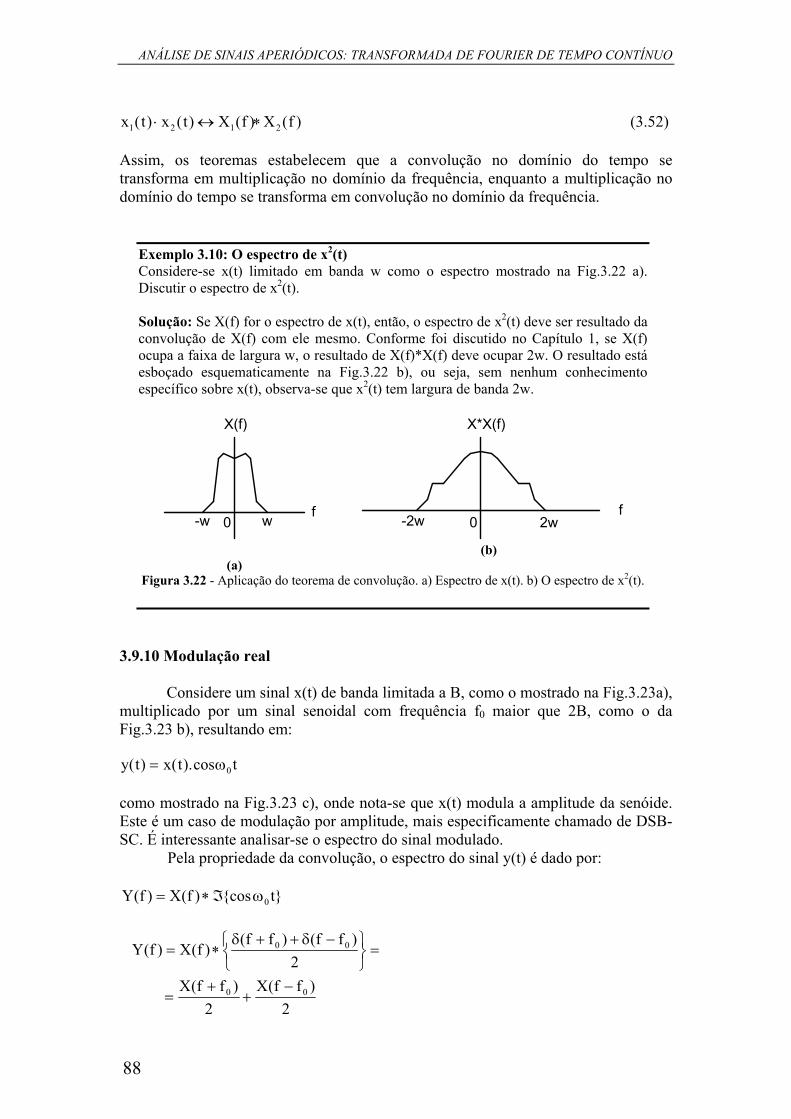
ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
88
x t x t X f X f1 2 1 2( ) ( ) ( ) ( ) (3.52) Assim, os teoremas estabelecem que a convolução no domínio do tempo se transforma em multiplicação no domínio da frequência, enquanto a multiplicação no domínio do tempo se transforma em convolução no domínio da frequência.
Exemplo 3.10: O espectro de x2(t) Considere-se x(t) limitado em banda w como o espectro mostrado na Fig.3.22 a). Discutir o espectro de x2(t). Solução: Se X(f) for o espectro de x(t), então, o espectro de x2(t) deve ser resultado da convolução de X(f) com ele mesmo. Conforme foi discutido no Capítulo 1, se X(f) ocupa a faixa de largura w, o resultado de X(f)*X(f) deve ocupar 2w. O resultado está esboçado esquematicamente na Fig.3.22 b), ou seja, sem nenhum conhecimento específico sobre x(t), observa-se que x2(t) tem largura de banda 2w.
X(f)
fw-w 0
(a)
X*X(f)
f2w-2w 0
(b)
Figura 3.22 - Aplicação do teorema de convolução. a) Espectro de x(t). b) O espectro de x2(t).
3.9.10 Modulação real
Considere um sinal x(t) de banda limitada a B, como o mostrado na Fig.3.23a), multiplicado por um sinal senoidal com frequência f0 maior que 2B, como o da Fig.3.23 b), resultando em: y t x t t( ) ( ).cos 0 como mostrado na Fig.3.23 c), onde nota-se que x(t) modula a amplitude da senóide. Este é um caso de modulação por amplitude, mais especificamente chamado de DSB-SC. É interessante analisar-se o espectro do sinal modulado.
Pela propriedade da convolução, o espectro do sinal y(t) é dado por:
}t{cos)f(X)f(Y 0
2
)ff(X
2
)ff(X
2
)ff()ff()f(X)f(Y
00
00
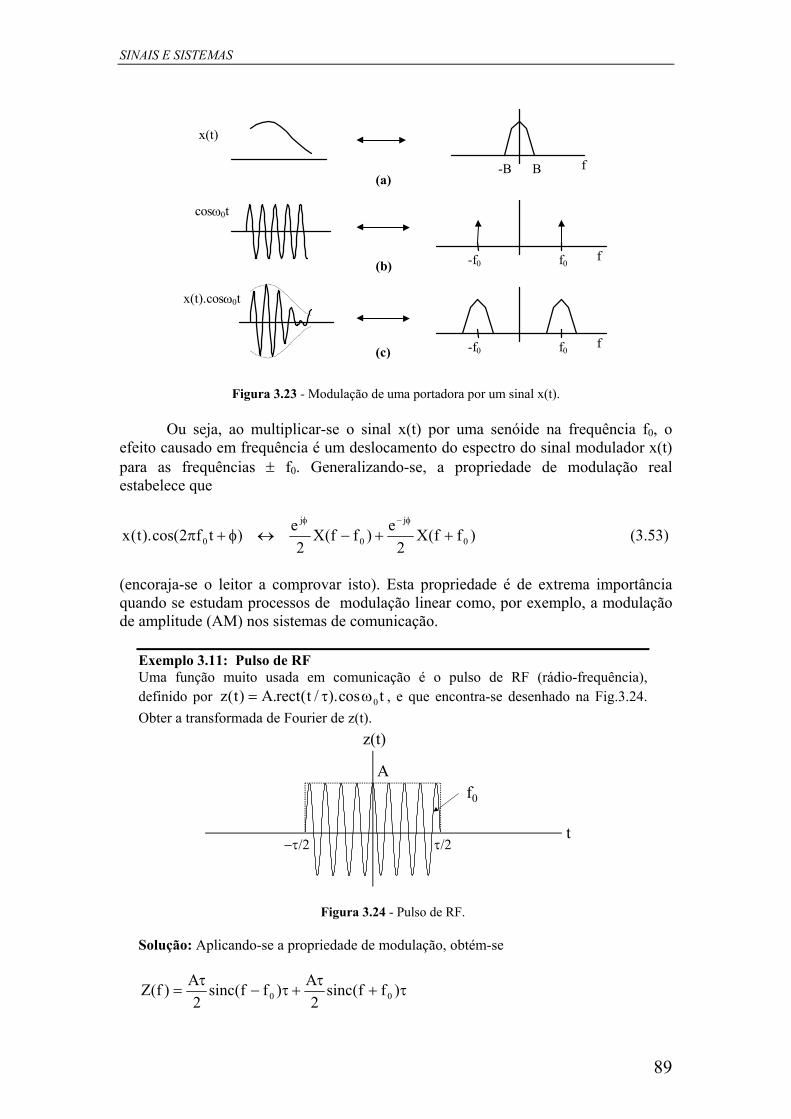
SINAIS E SISTEMAS
89
f
ff0-f0
B-B
ff0-f0
x(t)
cos0t
x(t).cos0t
(a)
(b)
(c)
Figura 3.23 - Modulação de uma portadora por um sinal x(t).
Ou seja, ao multiplicar-se o sinal x(t) por uma senóide na frequência f0, o
efeito causado em frequência é um deslocamento do espectro do sinal modulador x(t) para as frequências f0. Generalizando-se, a propriedade de modulação real estabelece que
)ff(X2
e)ff(X
2
e)tf2cos().t(x 0
j
0
j
0
(3.53)
(encoraja-se o leitor a comprovar isto). Esta propriedade é de extrema importância quando se estudam processos de modulação linear como, por exemplo, a modulação de amplitude (AM) nos sistemas de comunicação.
Exemplo 3.11: Pulso de RF Uma função muito usada em comunicação é o pulso de RF (rádio-frequência), definido por tcos)./t(rect.A)t(z 0 , e que encontra-se desenhado na Fig.3.24.
Obter a transformada de Fourier de z(t).
z(t)
t/2/2
Af0
Figura 3.24 - Pulso de RF. Solução: Aplicando-se a propriedade de modulação, obtém-se
)ff(sinc2
A)ff(sinc
2
A)f(Z 00
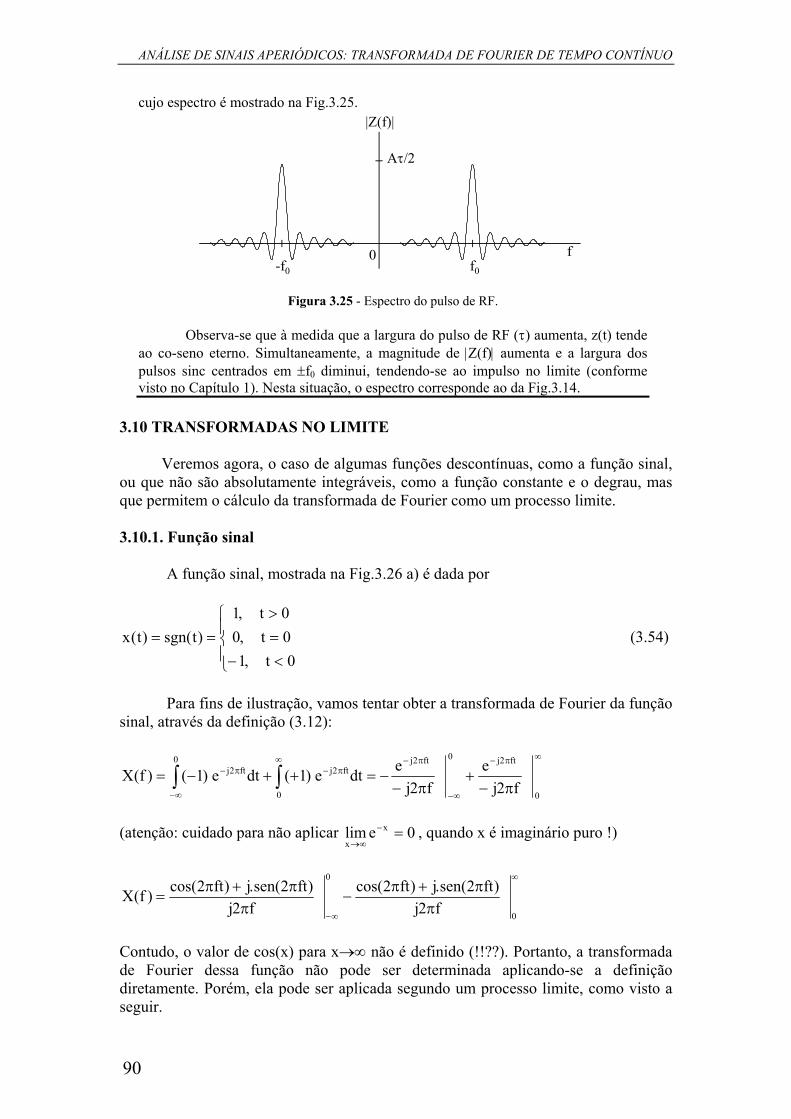
ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
90
cujo espectro é mostrado na Fig.3.25.
f0-f0
0
A/2
|Z(f)|
f
Figura 3.25 - Espectro do pulso de RF.
Observa-se que à medida que a largura do pulso de RF () aumenta, z(t) tende ao co-seno eterno. Simultaneamente, a magnitude de Z(f) aumenta e a largura dos pulsos sinc centrados em f0 diminui, tendendo-se ao impulso no limite (conforme visto no Capítulo 1). Nesta situação, o espectro corresponde ao da Fig.3.14.
3.10 TRANSFORMADAS NO LIMITE
Veremos agora, o caso de algumas funções descontínuas, como a função sinal, ou que não são absolutamente integráveis, como a função constante e o degrau, mas que permitem o cálculo da transformada de Fourier como um processo limite. 3.10.1. Função sinal A função sinal, mostrada na Fig.3.26 a) é dada por
0t,1
0t,0
0t,1
)tsgn()t(x (3.54)
Para fins de ilustração, vamos tentar obter a transformada de Fourier da função
sinal, através da definição (3.12):
0
ft2j0ft2j
0
ft2j0
ft2j
f2j
e
f2j
edte)1(dte)1()f(X
(atenção: cuidado para não aplicar 0elim x
x
, quando x é imaginário puro !)
0
0
f2j
)ft2sen(.j)ft2cos(
f2j
)ft2sen(.j)ft2cos()f(X
Contudo, o valor de cos(x) para x não é definido (!!??). Portanto, a transformada de Fourier dessa função não pode ser determinada aplicando-se a definição diretamente. Porém, ela pode ser aplicada segundo um processo limite, como visto a seguir.

SINAIS E SISTEMAS
91
Para o cálculo do espectro da função sinal, vamos considerar o seguinte pulso exponencial g(t), desenhado na Fig.3.26b): g t e u t e u t aat at( ) ( ) ( ) , 0 (3.55)
-1
1
t
sgn(t)
(a)
0t
g(t)
1
-1
e-atu(t)
-eatu(-t)
(b)
Figura 3.26 - Cálculo da transformada da função sinal. a) Função sinal. b) Funções exponenciais
usadas para obter a função sinal no limite, quando “a” tende a zero.
Pode-se observar que, à medida que “a” tende a zero, g(t) em (3.55) tende à função sinal (3.20), mostrado na Fig. 3.26 a), isto é
)t(glim)tsgn()t(x0a
e portanto
)f(Glim)]t(g[lim)]t(glim[)f(X)]t(x[0a0a0a
Como
G f g t e dt e e dt e e dta j f a j f
j ft at j ft at j ft( ) ( )( ) ( )
2 20
2
0
1
2
1
2
G fj
a( )
2
2 2
,
fica-se com
X f G fj
aj
a a( ) lim ( ) lim
0 0 2 2
2 2
Portanto, obtém-se mais um par de transformada de Fourier:
f
1j)tsgn(
(3.56)
3.10.2. Função constante Apesar de corresponder a um sinal extremamente simples, a função constante x(t)=A não é absolutamente integrável e nem permite que seu espectro seja determinado a partir de (3.12) (verificar isto !). Assim, deve-se aplicar o processo

ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
92
limite conforme visto no item anterior. Para isto, vamos considerar o par de transformadas de Fourier: )f(sinA)/t(rect.A . No limite, quando a largura do pulso de amplitude A tende ao infinito e, portanto, podemos afirmar que
)/t(rect.Alim)t(x
Considerando-se a transformada de Fourier de ambos os lados
)]f(sin.A[lim)]/t(rect.A[lim)]/f(sinc.Alim[)f(X)]t(x[
Chamando-se /1 , observa-se que
)]f
(sinc1.
[limA)f(X0
e assim, a partir de resultados do Capítulo 1, observa-se que o termo entre colchetes é um impulso no limite. Portanto, obtém-se finalmente, um novo par de transformada de Fourier:
)f(.AA (3.57) cujos gráficos estão esboçados na Fig.3.27.
ft00
A
Figura 3.27 - Transformada de Fourier da função constante.
Este resultado já devia ser esperado pois informa, simplesmente, que o espectro da função constante (só apresenta componente DC) é constituído por um impulso na origem (é não-nulo apenas em f=0).
Exemplo 3.12:
Calcular a integral imprópria
dye xy2j
Solução: Basta recorrer à definição de transformada de Fourier (3.12), com x(t)=1, e empregar (3.57) com A=1:
)f(dte.1]1[)f(X ft2j
,
e assim,
)x(dye xy2j

SINAIS E SISTEMAS
93
3.10.3. Degrau unitário O degrau unitário é definido por
x t u tt
t( ) ( )
,
,
1 0
0 0 (3.58)
e também não é absolutamente integrável. O leitor deve tentar calcular a transformada de Fourier do degrau usando a definição (3.12), a fim de concluir que ela não conduz a resultado definido. Porém, deve-se notar que
x t u tt
( ) ( )sgn( )
1
2 (3.59)
Assim, usando a propriedade de linearidade e o resultado (3.56), obtém-se
1j
2
)f(
2
)tsgn(
2
1)f(X
ou seja
f2
1j
2
)f()t(u
(3.60)
O espectro da função degrau é mostrado na Fig.3.28.
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
-150
-100
-50
0
50
100
150
f
arg{X(f)}
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.80
0.5
1
1.5
2
2.5
f
|X(f)|
Figura 3.28 - Módulo e fase do espectro de um degrau unitário.
Como o leitor perceberá, o conceito de transformada de Fourier e de suas propriedades constituirão ferramentas poderosas para análise de sistemas lineares invariantes no tempo (Capítulo 4) e amostragem de sinais (Capítulo 5).

ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
94
3.11 EXERCÍCIOS 3.11.1. Na transformada de Fourier, com v(t)V(f): a). Mostre que se:
i) v(t) for real e par, V(f) é real e par; ii) v(t) for real e ímpar, V(f) é imaginário e ímpar; iii) v(t) for imaginário e par, V(f) é imaginário e par; iv) v(t) for complexo e par, V(f) é complexo e par; v) v(t) for complexo e ímpar, V(f) é complexo e ímpar;
b) Demonstre as seguintes relações:
i) v(-t) V(-f); ii) v*(t) V*(-f); iii) v*(-t) V*(f); iv) v(t-) V(f)exp(-j2f); v) v(-t+) V(-f) exp(-j2f); vi) v*(-t+) V*(f) exp(-j2f);
3.11.2. A partir da definição, determinar a transformada de Fourier da função
exponencial bilateral tae)t(v . 3.11.3. Demonstrar o teorema de Parseval (3.32). 3.11.4. Demonstrar os seguintes teoremas da transformada de Fourier: a) Dualidade; b) Retardo no tempo; c) Mudança de escala; d) Modulação complexa; e) Diferenciação.
Sugestão: Consultar o livro do Carlson [3]. 3.11.5. Demonstrar que é necessário acrescentar um impulso unitário ao teorema da Integração para sinais cujas áreas líquidas são não nulas, isto é
t
)f(2
1
f2j
1)f(Vd)(v
3.11.6. Dado )2/t
(Arect)2/t
(Arect)t(z b
calcular a transformada de
Fourier de
t
b 0
),/1(Ad)(z
1)t(w .
Desenhar os gráficos de zb(t), w(t) e seu espectro. 3.11.7. Demonstrar os teoremas da convolução
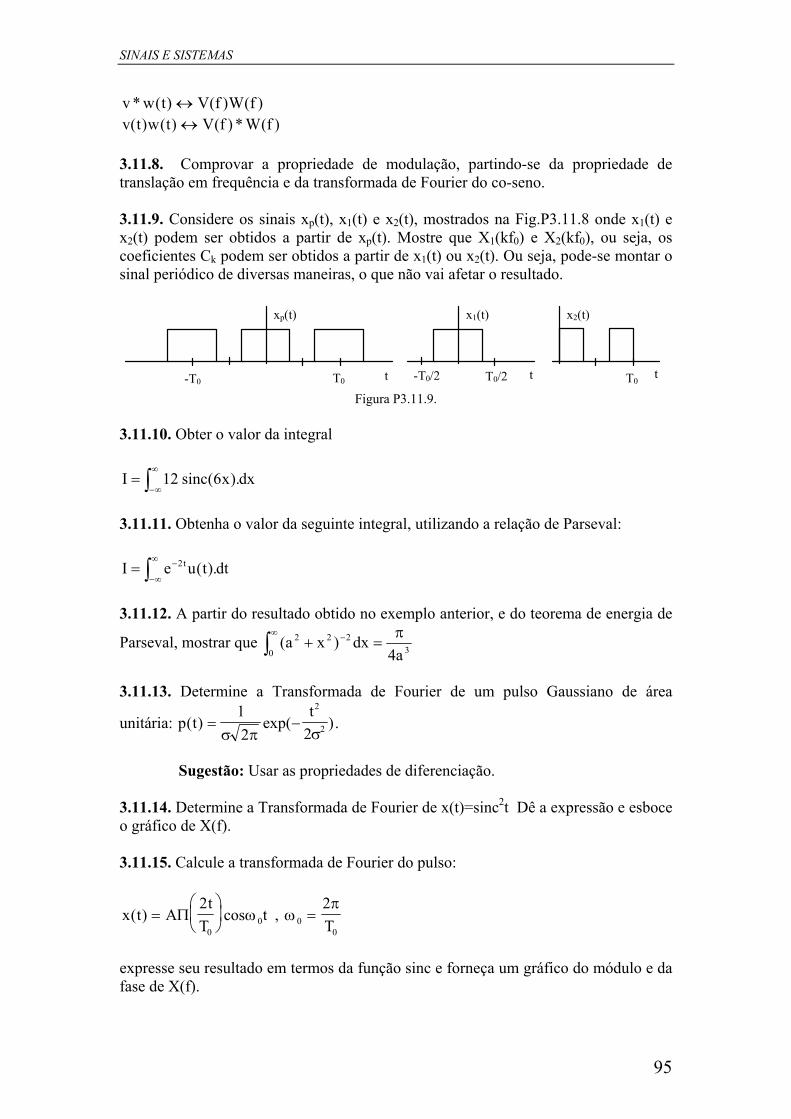
SINAIS E SISTEMAS
95
)f(W)f(V)t(w*v )f(W*)f(V)t(w)t(v
3.11.8. Comprovar a propriedade de modulação, partindo-se da propriedade de translação em frequência e da transformada de Fourier do co-seno. 3.11.9. Considere os sinais xp(t), x1(t) e x2(t), mostrados na Fig.P3.11.8 onde x1(t) e x2(t) podem ser obtidos a partir de xp(t). Mostre que X1(kf0) e X2(kf0), ou seja, os coeficientes Ck podem ser obtidos a partir de x1(t) ou x2(t). Ou seja, pode-se montar o sinal periódico de diversas maneiras, o que não vai afetar o resultado.
T0-T0 t
xp(t)
T0/2-T0/2 t
x1(t)
T0t
x2(t)
Figura P3.11.9.
3.11.10. Obter o valor da integral
dx).x6(sinc12I
3.11.11. Obtenha o valor da seguinte integral, utilizando a relação de Parseval:
dt).t(ueI t2
3.11.12. A partir do resultado obtido no exemplo anterior, e do teorema de energia de
Parseval, mostrar que 30
222
a4dx)xa(
3.11.13. Determine a Transformada de Fourier de um pulso Gaussiano de área
unitária: p tt
( ) exp( ) 1
2 2
2
2 .
Sugestão: Usar as propriedades de diferenciação.
3.11.14. Determine a Transformada de Fourier de x(t)=sinc2t Dê a expressão e esboce o gráfico de X(f). 3.11.15. Calcule a transformada de Fourier do pulso:
x t At
Tt
T( ) cos ,
2 2
00 0
0
expresse seu resultado em termos da função sinc e forneça um gráfico do módulo e da fase de X(f).
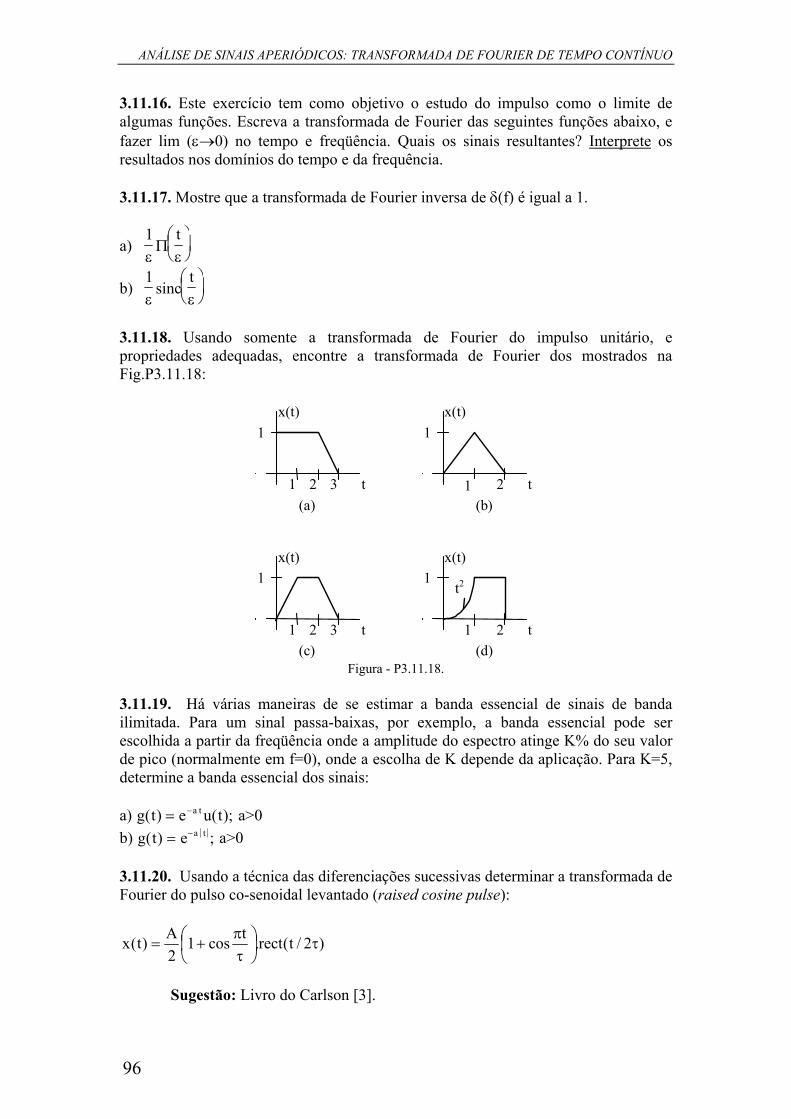
ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
96
3.11.16. Este exercício tem como objetivo o estudo do impulso como o limite de algumas funções. Escreva a transformada de Fourier das seguintes funções abaixo, e fazer lim (0) no tempo e freqüência. Quais os sinais resultantes? Interprete os resultados nos domínios do tempo e da frequência. 3.11.17. Mostre que a transformada de Fourier inversa de (f) é igual a 1.
a) 1
t
b) 1
sinc
t
3.11.18. Usando somente a transformada de Fourier do impulso unitário, e propriedades adequadas, encontre a transformada de Fourier dos mostrados na Fig.P3.11.18:
x(t)
t
1
1 2 3
x(t)
t
1
1 2
x(t)
t
1
1 2 3
x(t)
t
1
21
t2
(a) (b)
(c) (d) Figura - P3.11.18.
3.11.19. Há várias maneiras de se estimar a banda essencial de sinais de banda ilimitada. Para um sinal passa-baixas, por exemplo, a banda essencial pode ser escolhida a partir da freqüência onde a amplitude do espectro atinge K% do seu valor de pico (normalmente em f=0), onde a escolha de K depende da aplicação. Para K=5, determine a banda essencial dos sinais: a) g t e u ta t( ) ( ); a>0
b) g t e a t( ) ; a>0 3.11.20. Usando a técnica das diferenciações sucessivas determinar a transformada de Fourier do pulso co-senoidal levantado (raised cosine pulse):
)2/t(rect.t
cos12
A)t(x
Sugestão: Livro do Carlson [3].

SINAIS E SISTEMAS
97
3.11.21. Calcular a transformada de Fourier de (este é um sinal de FM, modulado por uma porta) t2cos)./t(rect.Atcos)./t(rect.AtcosA)f(v ccc , onde =2/fc.
Desenhar os gráficos de v(t) e seu espectro. 3.11.22. Calcular a transformada de Fourier da senóide amortecida:
)t(u.tsene)t(w 0at .
Desenhar os gráficos de v(t) e seu espectro. 3.11.23. Considere-se a função trem de impulsos no tempo definida por:
n
1T )nTt()]t([rep1
c) Esboçar o gráfico da função )]t([rep1T .
d) Calcular a Série de Fourier de )]t([rep1T .
e) Mostrar que a Transformada de Fourier de )]t([rep1T é dada por
)]f([repT
1)]}t([rep{
11 T/11
T .
f) Calcular graficamente e desenhar o resultado da convolução do trem de impulsos
)]t([rep1T com uma função pulso retangular )T/t(rect 2 , isto é,
v(t)= )T/t(rect 2 * )]t([rep
1T , para T1>>T2,
onde:
2/Ttpara0
2/Ttpara1)T/t(rect
2
22 .
g) Mostrar analiticamente que a Transformada de Fourier da função v(t) é dada por
)T
nf(.
T
nTsinc
T
T)]t(v[
1n 1
2
1
2
.
3.11.24. Uma análise grosseira do espectro do sinal de vídeo (TV em preto e branco) pode ser realizada adotando-se um modelo simplificado para tal sinal, conforme ilustrado na Fig.P3.11.21:
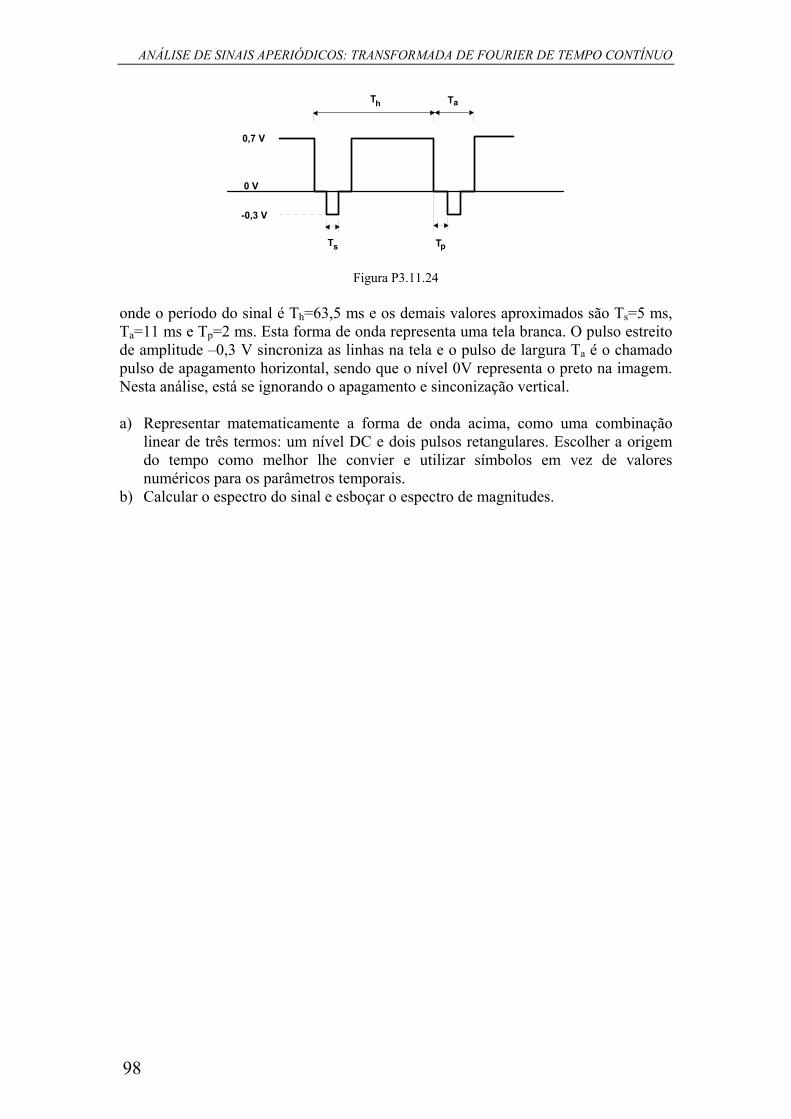
ANÁLISE DE SINAIS APERIÓDICOS: TRANSFORMADA DE FOURIER DE TEMPO CONTÍNUO
98
0 V
0,7 V
-0,3 V
Th Ta
Ts Tp
Figura P3.11.24 onde o período do sinal é Th=63,5 ms e os demais valores aproximados são Ts=5 ms, Ta=11 ms e Tp=2 ms. Esta forma de onda representa uma tela branca. O pulso estreito de amplitude –0,3 V sincroniza as linhas na tela e o pulso de largura Ta é o chamado pulso de apagamento horizontal, sendo que o nível 0V representa o preto na imagem. Nesta análise, está se ignorando o apagamento e sinconização vertical. a) Representar matematicamente a forma de onda acima, como uma combinação
linear de três termos: um nível DC e dois pulsos retangulares. Escolher a origem do tempo como melhor lhe convier e utilizar símbolos em vez de valores numéricos para os parâmetros temporais.
b) Calcular o espectro do sinal e esboçar o espectro de magnitudes.
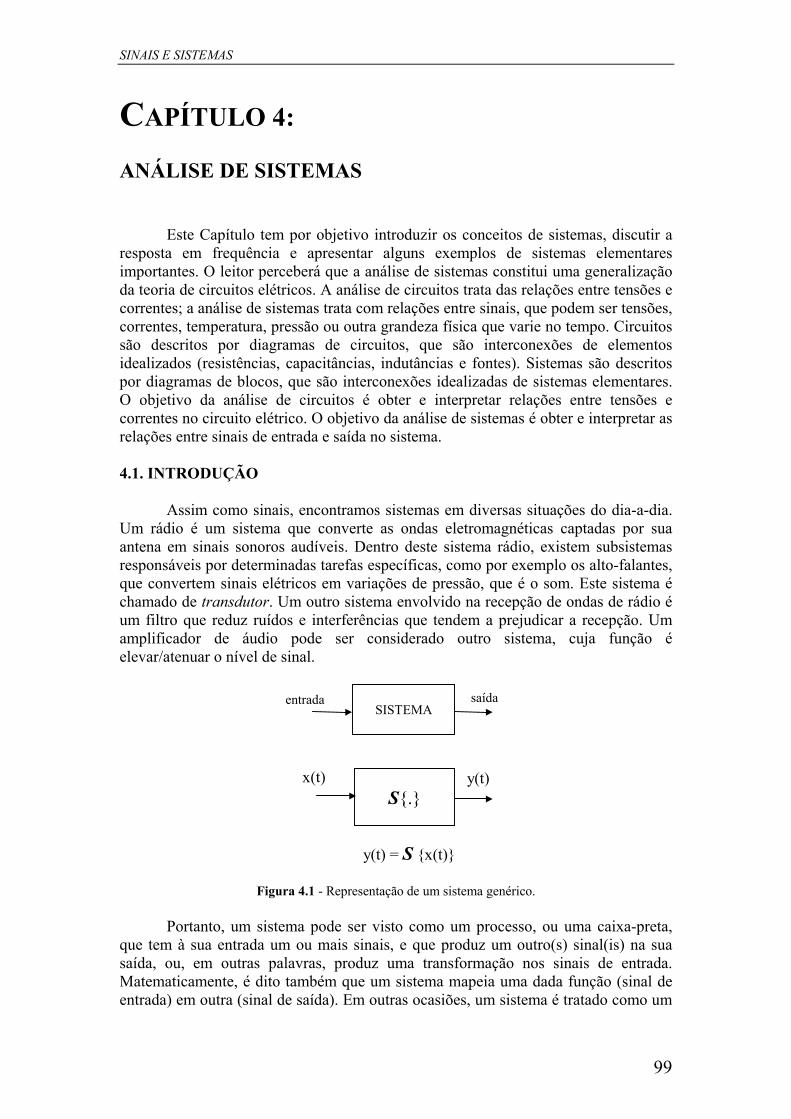
SINAIS E SISTEMAS
99
CAPÍTULO 4: ANÁLISE DE SISTEMAS
Este Capítulo tem por objetivo introduzir os conceitos de sistemas, discutir a
resposta em frequência e apresentar alguns exemplos de sistemas elementares importantes. O leitor perceberá que a análise de sistemas constitui uma generalização da teoria de circuitos elétricos. A análise de circuitos trata das relações entre tensões e correntes; a análise de sistemas trata com relações entre sinais, que podem ser tensões, correntes, temperatura, pressão ou outra grandeza física que varie no tempo. Circuitos são descritos por diagramas de circuitos, que são interconexões de elementos idealizados (resistências, capacitâncias, indutâncias e fontes). Sistemas são descritos por diagramas de blocos, que são interconexões idealizadas de sistemas elementares. O objetivo da análise de circuitos é obter e interpretar relações entre tensões e correntes no circuito elétrico. O objetivo da análise de sistemas é obter e interpretar as relações entre sinais de entrada e saída no sistema. 4.1. INTRODUÇÃO
Assim como sinais, encontramos sistemas em diversas situações do dia-a-dia. Um rádio é um sistema que converte as ondas eletromagnéticas captadas por sua antena em sinais sonoros audíveis. Dentro deste sistema rádio, existem subsistemas responsáveis por determinadas tarefas específicas, como por exemplo os alto-falantes, que convertem sinais elétricos em variações de pressão, que é o som. Este sistema é chamado de transdutor. Um outro sistema envolvido na recepção de ondas de rádio é um filtro que reduz ruídos e interferências que tendem a prejudicar a recepção. Um amplificador de áudio pode ser considerado outro sistema, cuja função é elevar/atenuar o nível de sinal.
SISTEMA
S{.}
y(t) = S {x(t)}
entrada saída
x(t) y(t)
Figura 4.1 - Representação de um sistema genérico.
Portanto, um sistema pode ser visto como um processo, ou uma caixa-preta, que tem à sua entrada um ou mais sinais, e que produz um outro(s) sinal(is) na sua saída, ou, em outras palavras, produz uma transformação nos sinais de entrada. Matematicamente, é dito também que um sistema mapeia uma dada função (sinal de entrada) em outra (sinal de saída). Em outras ocasiões, um sistema é tratado como um

ANÁLISE DE SISTEMAS
100
operador matemático S{ . }, que atua sobre o sinal de entrada para constituir a saída. Esquematicamente, pode-se representar um sistema como na Fig.4.1. De maneira genérica considera-se que a entrada do sistema é x(t) e a saída é y(t). 4.2. CARACTERÍSTICAS DE SISTEMAS
Nesta seção são apresentadas as principais características de sistemas, e é dada especial atenção aos sistemas ditos lineares e invariantes no tempo (SLIT). Os sistemas considerados neste texto terão uma única entrada e uma única saída (SISO - Single Input Single Output). 4.2.1 Sistemas com e sem memória
Um sistema é chamado sem memória [2] ou estático [8] se a saída y(t), num determinado instante, depende da entrada x(t) apenas naquele instante, i.e., não depende de entradas anteriores nem posteriores. No caso contrário, o sistema é dito com memória ou dinâmico.
Exemplo 4.1: Citar um exemplo de sistema sem memória e um com memória Solução: O sistema identidade y(t) = x(t), é um exemplo de sistema sem memória pois uma saída num determinado instante t0, y(t0), depende apenas do valor da entrada nesse mesmo instante, isto é, de x(t0). Por outro lado, um sistema especificado por y(t) = x(t -1) + 2x(t + 2) , constitui um sistema com memória, pois a saída no instante t2 = 2 s, por exemplo, depende das entradas em t1 = 1 s e em t3 = 3 s. Exemplo 4.2: Citar um exemplo prático de sistema sem memória e outro com memória Solução: Um divisor de tensão resistivo é um exemplo prático de um sistema sem memória:
x(t)
R1
R2 y(t)=x(t).R2/(R1+R2)
Figura 4.2 - Exemplo de sistema sem memória
Por outro lado, a relação entre a tensão e a corrente num capacitor representa um sistema com memória, pois a tensão depende não só da corrente no instante atual t, mas também de todos os valores de correntes desde - até t:
C
x(t)y t
Cx d
t
( ) ( )
1
Figura 4.3 - Exemplo de sistema com memória
Os exemplos anteriores são bastante ilustrativos pois permitem introduzir o conceito de estado/condições iniciais. A resposta de um sistema sem memória

SINAIS E SISTEMAS
101
depende apenas da entrada x(t), ou seja, dada a entrada, a saída é determinada. Para um sistema com memória, a saída depende não só da entrada, mas das chamadas condições iniciais, ou estado do sistema.
A resposta y(t) de um sistema com memória para t t 0 é determinada por [2]: condições iniciais em t t t 0 0, ( )v entrada para t t 0 ou esquematicamente v( )
( ) ,( )
t
x t t ty t
0
0 (4.1)
A resposta do sistema pode ser dividida em duas partes:
Uma devida às condições iniciais considerando a entrada zero. Esta, às vezes, é
chamada de resposta a entrada zero ou resposta homogênea, yh(t). Uma devida somente à entrada, considerando condições iniciais nulas. Esta pode
ser chamada de resposta forçada, yf(t).
Dessa forma: y(t)=yf(t)+yh(t), e o mesmo sistema pode ter diferentes respostas à mesma entrada, dependendo das condições iniciais. Muitas vezes, considera-se que as condições iniciais são nulas.
Exemplo 4.3: Especificar a resposta do sistema capacitor do exemplo 4.2, considerando-se as condições iniciais. Solução: Completando a análise do sistema com memória dado no exemplo 4.2, a tensão num capacitor depende da sua carga inicial (ou tensão inicial) no instante t t 0:
y tC
x d y tt
t
( ) ( ) ( ) 1
0
0
onde y(t) é a tensão e x(t) a corrente pelo capacitor.
4.2.2. Inversibilidade e sistemas inversos
Um sistema é chamado inversível se entradas distintas levam a saídas distintas. Em outras palavras, conhecendo-se a saída, pode-se determinar a entrada de maneira única.
Exemplo 4.4: Citar um exemplo de sistema inversível e outro não inversível. Solução: Um exemplo de sistema inversível é: y(t) = 2x(t) , cujo sistema inverso é z(t) = y(t) / 2 = x(t)
ANÁLISE DE SISTEMAS
102
Um exemplo de sistema não-inversível é:y(t) = x (t) 2 , pois, dada uma saída, existe uma ambiguidade de sinal em relação à entrada. Por exemplo, à saída y=4, podem ser associadas as entradas x=-2 ou x=+2.
4.2.3. Causalidade (ou Realizabilidade)
Um sistema é causal [2]-[4] ou realizável [8] se a saída no instante t depende apenas de valores da entrada para instantes de tempo menores ou igual a t, ou seja, a saída não pode depender de valores futuros da entrada.
Exemplo 4.5: Citar um exemplo de ambos, um sistema causal e um não causal. Solução: Um sistema causal é y(t) = x(t) + x(t - 2) pois todas as entradas atuais (no instante t) dependem apenas de entradas atuais (nos instantes t) ou passadas (nos instantes t-2). Por outro lado, um sistema não-causal é y(t) = x(t +1) pois uma saída avaliada no instante atual t segundos , depende da entrada em (t+1) segundos, e que portanto ainda não aconteceu.
Todos os sistemas físicos são causais. Conforme será visto adiante, um filtro
ideal é um sistema não-causal ou não-realizável fisicamente, e portanto não pode ser implementado com componentes reais. No projeto de um filtro prático, procura-se uma aproximação para um filtro ideal, mas respeitando-se o princípio da causalidade. A causalidade é importante quando trabalha-se com sistemas que operam em tempo real, como em sistemas de comunicações e sistemas de controle. Em aplicações onde não se necessita o processamento em tempo real, podem aparecer sistemas não-causais [10]. Por exemplo, em sinais gravados (voz, geofísicos, imagem), pode-se utilizar toda a informação armazenada para determinar uma saída num determinado instante, o que pode ser considerado uma operação não-causal. 4.2.4. Estabilidade
Um sistema estável é aquele onde pequenas entradas (de baixa amplitude) produzem saídas que não divergem. Uma outra definição é que entradas limitadas produzam saídas limitadas (BIBO - Bounded Input Bounded Output).
Exemplo 4.6: Citar um exemplo de ambos, um sistema estável e um não estável. Solução: Um exemplo de sistema estável é:
SINAIS E SISTEMAS
103
y(t) = 2x(t)
pois, se x(t) é limitada, então, existe um número Mx, tal que, xM)t(x para
todo t e, portanto, ocorre xM2)t(x2)t(y , independentemente de t.
Um exemplo de um sistema instável é o acumulador, definido por:
td)(x)t(y . Assim, por exemplo, se x t u t( ) ( ) (degrau unitário), a qual é
limitada (pois u(t)1 para todo t), observa-se que o resultado da integral, quando t, diverge e tende para +. Exemplo 4.7: Citar um exemplo prático de sistema estável e outro instável. Solução: Um sistema de som em um auditório (com microfone, amplificadores e caixa de som) é um exemplo de sistema estável, pois a saída do sistema é uma versão amplificada da voz do cantor.
Por outro lado, o sistema pode tornar-se instável se um cantor em movimento ficar muito próximo ao alto-falante, e gerar o efeito de microfonia.
Conforme percebe-se no exemplo anterior, é muito mais fácil provar que um sistema não é estável, do que o contrário, uma vez que basta apresentar um único contra-exemplo para comprovar a negação. Porém, para provar que um dado sistema é estável (ou sem memória, ou inversível, ou causal, etc), devem-se apresentar argumentos que valham para todos os instantes de tempo e para todos os sinais de entrada possíveis e imagináveis. 4.2.5. Invariância no tempo
Um sistema é dito invariante no tempo se um atraso na entrada produz o mesmo atraso na saída. Um sistema variante no tempo é um sistema cujas características são alteradas com o tempo como, por exemplo, as alterações das propriedades de um circuito eletrônico quando a temperatura em torno dele varia significativamente [5].
Se uma entrada x(t) produz uma saída y(t), então, se o sistema é invariante no tempo, ocorrem )tt(y)tt(x
)t(y)t(x
00
S
S (4.3)
Como veremos a seguir, quando a invariância de um sistema é associada a linearidade permite-se estabelecer uma análise matemática extremamente elegante.
Exemplo 4.8: Citar um exemplo de ambos, um sistema invariante e um não invariante. Solução: Como exemplo de sistema invariante, considere
y t sin x t( ) ( ) Chamando a saída y1(t) como a resposta a uma entrada x1(t), tem-se

ANÁLISE DE SISTEMAS
104
y t sin x t1 1( ) ( ) Seja agora a entrada x2(t) x t x t t2 1 0( ) ( ) cuja correspondente saída é
y t sin x t sin x t t2 2 1 0( ) ( ) ( ) e como
y t t sin x t t1 0 1 0( ) ( ) tem-se que y t y t t2 1 0( ) ( ) e o sistema é invariante no tempo.
Por outro lado, considere agora o sistema y t t x t( ) ( ) e para uma entrada x t y t t x t1 1 1( ) , ( ) ( ) . Para uma entrada x t x t t2 1 0( ) ( ) , tem-se a saída y t t x t t x t t2 2 1 0( ) ( ) ( ) Como y t t t t x t t y t1 0 0 1 0 2( ) ( ) ( ) ( ) e portanto o sistema não é invariante no tempo. Exemplo 4.9: Um sistema diferenciador é um dispositivo caracterizado pela relação y(t)=dx(t)/dt. Avaliar se o diferenciador é invariante no tempo.
Solução: Vamos avaliar a resposta do diferenciador à uma entrada x1(t):
dt
)t(dx)t(y 1
1 .
A resposta à x2(t) = x1(t-t0) será
)tt(y
)]01)(tt(y[dt
)tt(d.
)tt(d
)tt(dx
dt
)tt(dx
dt
)t(dx)t(y
01
010
0
010122

SINAIS E SISTEMAS
105
que evidencia que o sistema é invariante no tempo.
4.2.6. Linearidade
Um sistema linear é aquele onde vale o princípio da superposição: se a entrada é uma combinação linear de diversos sinais, a saída será a combinação linear das respostas do sistema a cada um dos sinais de entrada. a) Linearidade para sistemas sem memória
Para um sistema sem memória, a saída y(t) depende apenas da entrada x(t). Se as respostas às entradas x1(t) e x2(t) são y1(t)=S{x1(t)} e y2(t)=S{x2(t)}, respectivamente, então o sistema é linear se )t(y)t(y)}t(y{)}t(y{)t(x)t(x 212121 SSS (aditividade) (4.4)
e )t(y.a)}t({y.a)t(x.a 111 SS (homogeneidade) (4.5)
As duas condições acima, combinadas numa só, são o que se chama de princípio da superposição, que pode ser rescrito de maneira mais sucinta como )t(ya)t(ya)t(xa)t(xa)t(xa)t(xa 221122112211 SSS (4.6)
Exemplo 4.10: Avaliar se os sistemas abaixo são ou não lineares: a) x(t)sin=y(t)
b) tsin).t(x)t(y
c) constantesba,,b)t(ax)t(y Solução: a) Fazendo )t(xa)t(xa)t(x 2211 , tem-se que
)t(xa)t(xasin)t(xa)t(xa
e
)t(xasin)t(xa,)t(xasin)t(xa
22112211
22221111
S
SS
Como )t(xasin)t(xasin)t(xa)t(xasin 22112211 , tem-se que o sistema é não-linear. b) Neste caso calculam-se:

ANÁLISE DE SISTEMAS
106
)t(sin)t(xa)t(xa)t(xa)t(xa
e
)t(sin)t(xa)t(xa,)t(sin)t(xa)t(xa
22112211
22221111
S
SS
e observa-se facilmente que )t(xa)t(xa)t(xa)t(xa 22112211 SSS
e portanto o sistema é linear. c) No caso onde ,b)t(ax)t(y para a e b contantes, tem-se
)t(y)t(yb)t(ax)t(ax)t(x)t(x
b)t(ax)t(y
b)t(ax)t(y
212121
22
11
S
e, portanto, o sistema é não-linear.
Sistemas de modulação em frequência (FM) respondem conforme o caso a) do
exemplo 4.10 e, portanto, o processo de FM é não-linear. Sistemas de modulação em amplitude (AM) respondem conforme o caso b) e são, portanto, lineares. Sistemas como o descrito no caso c) são ditos incrementalmente lineares, pois respondem linearmente a diferenças na entrada, ou seja,
)t(x)t(xa)t(ax)t(ax)t(y)t(y 212121 a diferença na resposta entre duas entradas é uma função linear da diferença das entradas.
Exemplo 4.11: Avaliar se o diferenciador y(t)=dx/dt é um sistema linear. Solução: Sejam y1(t) e y2(t) as respostas às entradas x1(t) e x2(t), respectivamente, de maneira que
dt
)t(dx)t(y 1
1 e dt
)t(dx)t(y 2
2
A resposta à entrada a1.x1(t) e a2.x2(t) é
)t(ya)t(yadt
)t(dxa
dt
)t(dxa)t(xa)t(xa
dt
d2211
22
112211
o que concorda com (4.6); portanto, o sistema é linear.

SINAIS E SISTEMAS
107
b) Linearidade para sistemas com memória
Para um sistema com memória, a saída não depende apenas da entrada, mas também das condições iniciais. Assim, as condições de aditividade e homogeneidade devem ser aplicadas também para as condições iniciais.
Considere a saída yi(t), i=1, 2, para tt0, devido às condições iniciais vi(t0) e entradas xi(t) para tt0. Então para o sistema ser linear devem valer:
0i0i
0 tt),t(ytt,)t(x
)t(
iv
(4.7)
Para condições iniciais )t()t( 0201 vv e entrada )t(x)t(x 21 , deve-se ter a
saída )t(y)t(y)t(y 21 para tt0 (condição de aditividade)
011011
0201 tt),t(y)t(ytt),t(x)t(x
)t()t(
vv
(4.8)
A condição de homogeneidade, para uma constante “a”, fica: av1 ( )
( ) ,( ),
t
ax t t tay t t t
0
1 01 0
(4.9)
Combinando numa só condição, a
aa
1
11
v v1 2( ) ( )
( ) ( ) ,( ) ( ),
t a t
x t a x t t ty t a y t t t
0 2 0
1 2 2 01 2 2 0
(4.10)
Exemplo 4.12: Considere o sistema RC série a seguir, com corrente de entrada x(t), e tensão de saída y(t).
x(t)
y(t)R
C
Figura 4.4 - Circuito RC série com condição inicial não-nula.
Neste caso , a tensão de saída é )t(vd)(xC
1)t(Rx)t(y 0c
t
t0
e, a condição
inicial é a tensão no capacitor em t=t0. Avaliar se esse sistema é linear. Solução: Fazendo a análise para entradas a x t1 1( ) e a x t2 2 ( ) e condições iniciais a v tc1 01
( ) e a v tc2 02( ), tem-se:
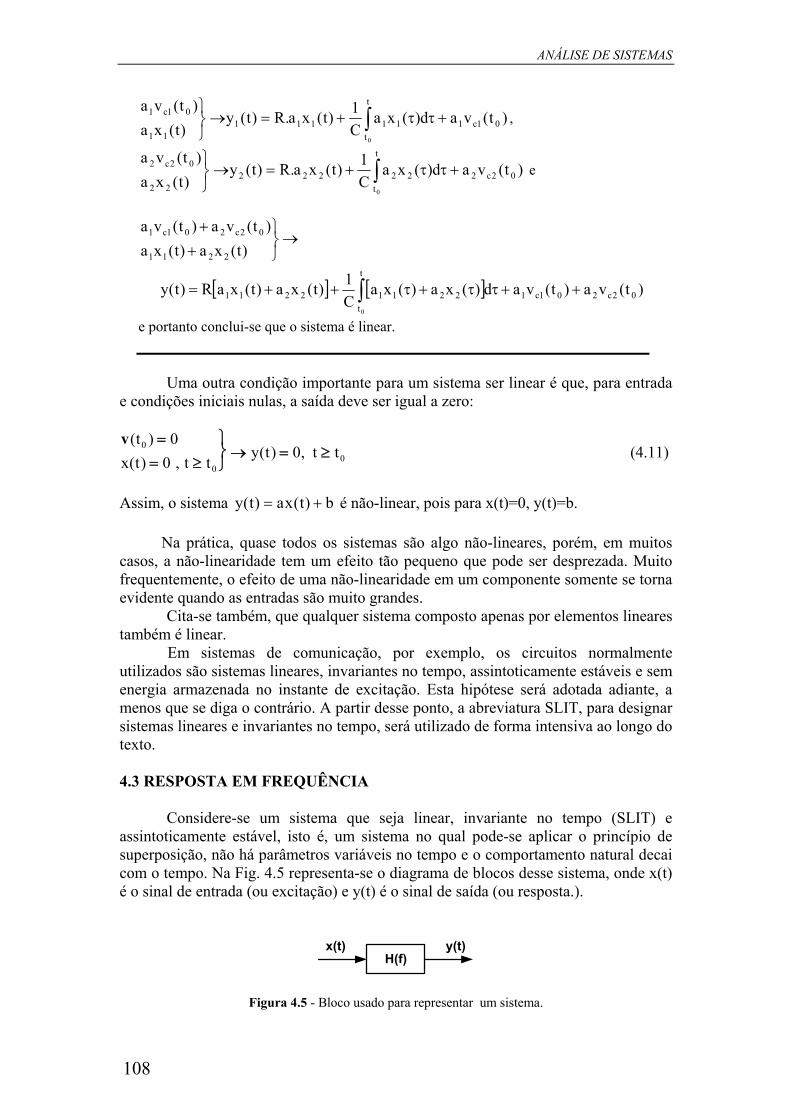
ANÁLISE DE SISTEMAS
108
)t(vad)(xaC
1)t(xa.R)t(y
)t(xa
)t(va01c1
t
t
1111111
01c1
0
,
)t(vad)(xaC
1)t(xa.R)t(y
)t(xa
)t(va02c2
t
t
2222222
02c2
0
e
)t(va)t(vad)(xa)(xaC
1)t(xa)t(xaR)t(y
)t(xa)t(xa
)t(va)t(va
02c201c1
t
t
22112211
2211
02c201c1
0
e portanto conclui-se que o sistema é linear.
Uma outra condição importante para um sistema ser linear é que, para entrada
e condições iniciais nulas, a saída deve ser igual a zero: v( )
( ) ,( ) ,
t
x t t ty t t t
0
00
0
00
(4.11)
Assim, o sistema b)t(xa)t(y é não-linear, pois para x(t)=0, y(t)=b.
Na prática, quase todos os sistemas são algo não-lineares, porém, em muitos casos, a não-linearidade tem um efeito tão pequeno que pode ser desprezada. Muito frequentemente, o efeito de uma não-linearidade em um componente somente se torna evidente quando as entradas são muito grandes. Cita-se também, que qualquer sistema composto apenas por elementos lineares também é linear.
Em sistemas de comunicação, por exemplo, os circuitos normalmente utilizados são sistemas lineares, invariantes no tempo, assintoticamente estáveis e sem energia armazenada no instante de excitação. Esta hipótese será adotada adiante, a menos que se diga o contrário. A partir desse ponto, a abreviatura SLIT, para designar sistemas lineares e invariantes no tempo, será utilizado de forma intensiva ao longo do texto. 4.3 RESPOSTA EM FREQUÊNCIA Considere-se um sistema que seja linear, invariante no tempo (SLIT) e assintoticamente estável, isto é, um sistema no qual pode-se aplicar o princípio de superposição, não há parâmetros variáveis no tempo e o comportamento natural decai com o tempo. Na Fig. 4.5 representa-se o diagrama de blocos desse sistema, onde x(t) é o sinal de entrada (ou excitação) e y(t) é o sinal de saída (ou resposta.).
H(f)x(t) y(t)
Figura 4.5 - Bloco usado para representar um sistema.
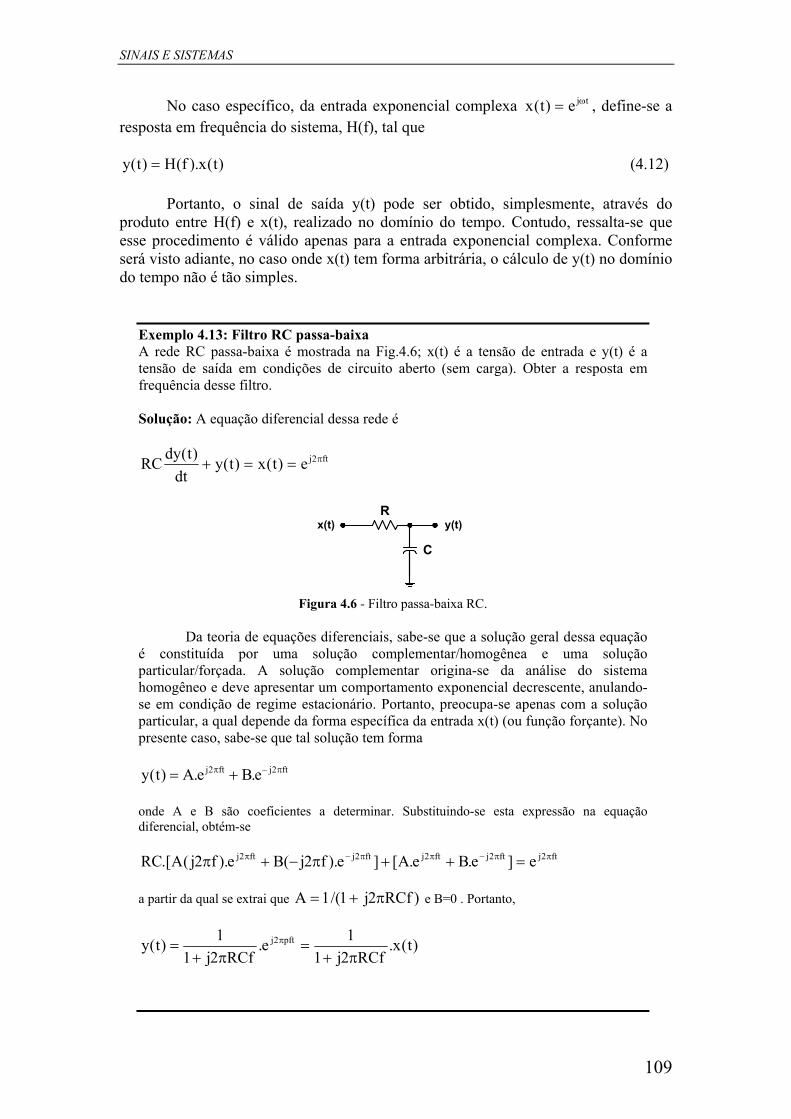
SINAIS E SISTEMAS
109
No caso específico, da entrada exponencial complexa tje)t(x , define-se a resposta em frequência do sistema, H(f), tal que
)t(x).f(H)t(y (4.12) Portanto, o sinal de saída y(t) pode ser obtido, simplesmente, através do produto entre H(f) e x(t), realizado no domínio do tempo. Contudo, ressalta-se que esse procedimento é válido apenas para a entrada exponencial complexa. Conforme será visto adiante, no caso onde x(t) tem forma arbitrária, o cálculo de y(t) no domínio do tempo não é tão simples.
Exemplo 4.13: Filtro RC passa-baixa A rede RC passa-baixa é mostrada na Fig.4.6; x(t) é a tensão de entrada e y(t) é a tensão de saída em condições de circuito aberto (sem carga). Obter a resposta em frequência desse filtro. Solução: A equação diferencial dessa rede é
ft2je)t(x)t(ydt
)t(dyRC
R
C
y(t)x(t)
Figura 4.6 - Filtro passa-baixa RC.
Da teoria de equações diferenciais, sabe-se que a solução geral dessa equação é constituída por uma solução complementar/homogênea e uma solução particular/forçada. A solução complementar origina-se da análise do sistema homogêneo e deve apresentar um comportamento exponencial decrescente, anulando-se em condição de regime estacionário. Portanto, preocupa-se apenas com a solução particular, a qual depende da forma específica da entrada x(t) (ou função forçante). No presente caso, sabe-se que tal solução tem forma
ft2jft2j e.Be.A)t(y onde A e B são coeficientes a determinar. Substituindo-se esta expressão na equação diferencial, obtém-se
ft2jft2jft2jft2jft2j e]e.Be.A[]e).f2j(Be).f2j(A.[RC
a partir da qual se extrai que )RCf2j1/(1A e B=0 . Portanto,
)t(x.RCf2j1
1e.
RCf2j1
1)t(y pft2j

ANÁLISE DE SISTEMAS
110
Finalmente, obtém-se a resposta em frequência
RCf2j1
1
)t(x
)t(y)f(H
para ft2je)t(x .
Conforme visto nesse exemplo, em geral, a resposta em frequência é uma
grandeza complexa e, portanto, pode ser expressa na forma
)]f(Harg[je.)f(H)f(H (4.13)
onde H(f) é o módulo e arg[H(f)] é o ângulo de fase. No exemplo a seguir, mostra-se que H(f) apresenta simetria Hermitiana em relação a f, isto é
)f(Harg.je.)f(H)f(*H)f(H (4.14)
a qual indica que o gráfico do módulo H(f) tem simetria par e, o da fase arg[H(f)], tem simetria ímpar.
Exemplo 4.14: O regime permanente senoidal Determinar a resposta de um SLIT à excitação )tcos(A)t(x x0x .
Solução: Usando-se a identidade de Euler, observa-se que x(t) pode ser escrito como
tjjxtjjx 0x0x e.e2
Ae.e
2
A)t(x
donde percebe-se que cada parcela de x(t) constitui uma exponencial complexa, uma na frequência f0 e outra em –f0, cuja resposta pode ser obtida a partir de (4.12)
tjjx0
tjjx0
0x0x e.e2
A)f(He.e
2
A)f(H)t(y
Embora H(f0) seja uma função complexa, em circuitos práticos, y(t) deve ser uma função real no tempo pois x(t) é real. Entretanto, isto será verdadeiro se, e somente se, H(f) for Hermitiana, conforme (4.14). Assim, substituindo-se (4.13), pode-se obter
]ee[2
A)f(H)t(y ))f(Hargt(j))f(Hargt(jx
00x00x0
e, portanto, usando novamente a identidade de Euler, obtém-se a solução final
)tcos(A)t(y y0y
onde
x0y A.)f(HA e )]f(H[arg 0xy

SINAIS E SISTEMAS
111
Apesar de ser um caso particular, o resultado do exemplo anterior, informando
que a função H(f) é Hermitiana, pode ser estendido para qualquer rede real. Demonstrou-se que o sinal de saída de um SLIT, para uma excitação senoidal
também é senoidal, na mesma frequência de entrada e diferindo somente na amplitude e no ângulo de fase, conforme é regularmente estudado em circuitos elétricos. Além disso, trabalhando-se apenas com as senóides de entrada e de saída, podem ser determinadas as características H(f) e arg[H(f)]. A partir desta propriedade, justifica-se o procedimento de levantar experimentalmente a resposta em frequência de sistemas usando-se sinais senoidais, mesmo que o sistema se destine a operar com sinais de natureza arbitrária.
Nesta seção estudou-se o procedimento para obter o sinal de saída e a resposta em frequência de SLITs quando as entradas são exponenciais complexas ou sinais senoidais. Na próxima seção, estuda-se como obter esses sinais de saída para entradas arbitrárias. 4.4 RESPOSTA PARA SINAIS ARBITRÁRIOS
Considere agora um sistema linear invariante no tempo (SLIT), com condições iniciais nulas em t=0. Aplicando à entrada um impulso unitário, (t), tem-se uma saída h(t), conforme o esquema da Fig.4.7:
SLIT(t) h(t)
Figura 4.7 - Sistema Linear invariante no Tempo com entrada impulsiva.
A função h(t) é a resposta do sistema a um impulso unitário, ou simplesmente resposta impulsiva do sistema, ou seja
)t()t(h
S (4.15) Além disso, como o sistema é invariante no tempo
)t()t(h S (4.16)
Como foi visto no Capítulo 1, qualquer sinal x(t) pode ser escrito como a seguinte convolução com o impulso: )t()t(x)t(x
A resposta do sistema S{ . } para a entrada x(t) é, portanto,
d)t()(x
)t()t(x)t(x)t(y
S
SS
(4.17)

ANÁLISE DE SISTEMAS
112
Como o presente sistema é linear, vale o princípio de superposição, e assim, pode-se permutar a ordem entre o operador S{ . } e a integral (somatório contínuo)
d)t()(x)t(y S (4.18)
e portanto, a resposta do SLIT depende somente do conhecimento da resposta impulsiva. Por outro lado, aplicando-se (4.16)
d)t(h)(x)t(y
que é a integral de convolução:
)t(h)t(xd)t(h)(x)t(y
(4.19)
Assim, chega-se ao importante resultado que, para se obter a saída de um SLIT
a uma entrada x(t) qualquer, basta conhecer sua resposta impulsiva h(t) e efetuar a convolução indicada em (4.19). Em outras palavras, num SLIT (causal), a resposta impulsiva caracteriza completamente o sistema.
Como a convolução é uma propriedade comutativa, também é possível escrever
)t(x)t(hd)t(x)(h)t(y
(4.20)
Em geral, a resposta ao degrau é um resultado mais utilizado na prática que a
resposta impulsiva. Chamando a resposta ao degrau de um SLIT de g(t):
d)t(u)(h
)t(u)t(h)t(h)t(u
)t(u)t(g S
(4.21)
Considerando agora a derivada da resposta ao degrau:
d)t(udt
d)(h
d)t(u)(hdt
d
dt
)t(gd
Como d u t
dtt
( )( ) ,
SINAIS E SISTEMAS
113
)t(h)t()t(hd)t()(hdt
)t(gd
e portanto
dt
)}t(u{d
dt
)t(gd)t(h
S (4.22)
ou seja, pode-se obter a resposta impulsiva a partir da derivada no tempo da resposta ao degrau. 4.5 RESPOSTA IMPULSIVA E RESPOSTA EM FREQUÊNCIA
Considere novamente um sistema linear invariante no tempo (SLIT), excitado por ft2je)t(x . Aplicando-se (4.20) obtém-se
ft2jf2j)t(f2j e.de).(hde).(h)t(x)t(h)t(y
porém, o termo entre chaves é a transformada de Fourier de h(t), e assim
ft2je)].t(h[)t(y (4.23)
Por outro lado, discutimos na seção 4.3 que a resposta em frequência H(f) é tal que
ft2je).f(H)t(y (4.24) Assim, comparando-se as expressões (4.23) com (4.24) conclui-se que a
resposta em frequência de um SLIT é dada pela transformada de Fourier da sua resposta impulsiva h(t):
dte)t(h)]t(h[)f(H ft2j (4.25)
Portanto, fica estabelecido mais um par de transformada de Fourier, a saber:
)f(H)t(h (4.26)
Como a saída y(t) de um SLIT, com entrada x(t) e resposta impulsiva h(t), é
)t(h)t(x)t(y , aplicando-se o teorema da convolução discutido no Capítulo 3, tem-se em frequência, Y f X f H f( ) ( ) ( ) (4.27)
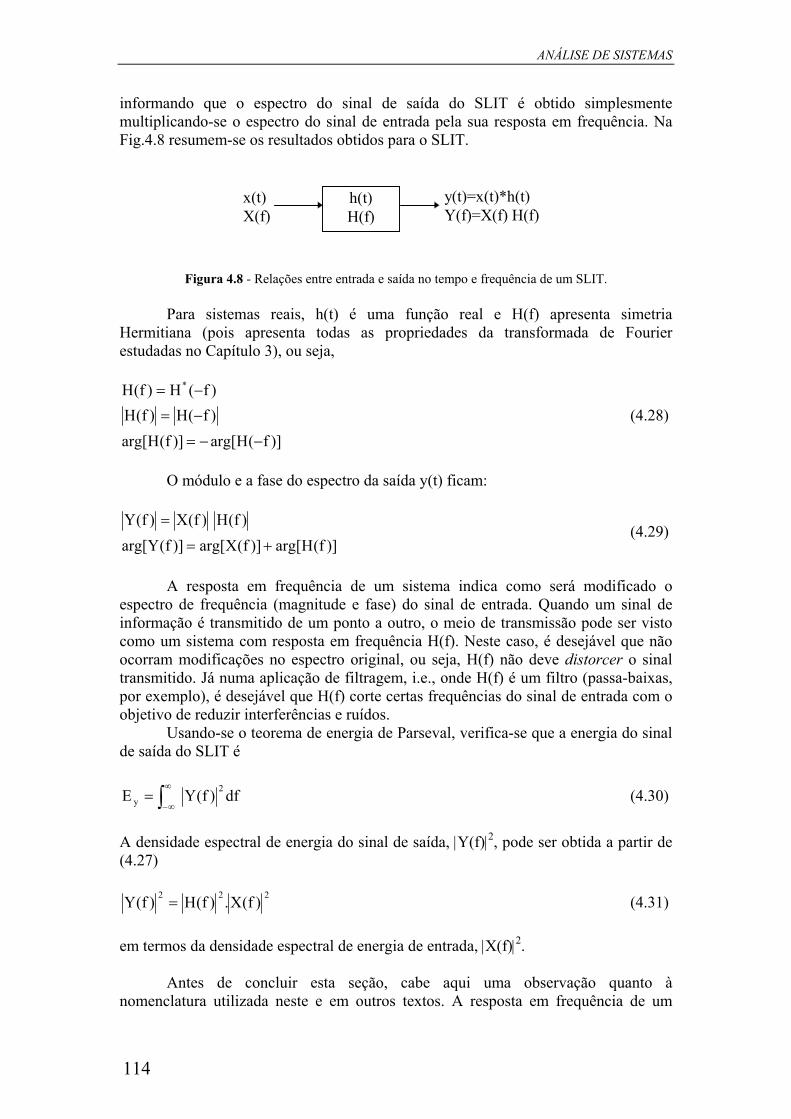
ANÁLISE DE SISTEMAS
114
informando que o espectro do sinal de saída do SLIT é obtido simplesmente multiplicando-se o espectro do sinal de entrada pela sua resposta em frequência. Na Fig.4.8 resumem-se os resultados obtidos para o SLIT.
h(t)H(f)
x(t)X(f)
y(t)=x(t)*h(t)Y(f)=X(f) H(f)
Figura 4.8 - Relações entre entrada e saída no tempo e frequência de um SLIT.
Para sistemas reais, h(t) é uma função real e H(f) apresenta simetria Hermitiana (pois apresenta todas as propriedades da transformada de Fourier estudadas no Capítulo 3), ou seja,
)]f(Harg[)]f(Harg[
)f(H)f(H
)f(H)f(H *
(4.28)
O módulo e a fase do espectro da saída y(t) ficam:
)]f(Harg[)]f(Xarg[)]f(Yarg[
)f(H)f(X)f(Y
(4.29)
A resposta em frequência de um sistema indica como será modificado o
espectro de frequência (magnitude e fase) do sinal de entrada. Quando um sinal de informação é transmitido de um ponto a outro, o meio de transmissão pode ser visto como um sistema com resposta em frequência H(f). Neste caso, é desejável que não ocorram modificações no espectro original, ou seja, H(f) não deve distorcer o sinal transmitido. Já numa aplicação de filtragem, i.e., onde H(f) é um filtro (passa-baixas, por exemplo), é desejável que H(f) corte certas frequências do sinal de entrada com o objetivo de reduzir interferências e ruídos. Usando-se o teorema de energia de Parseval, verifica-se que a energia do sinal de saída do SLIT é
df)f(YE
2
y (4.30)
A densidade espectral de energia do sinal de saída, Y(f)2, pode ser obtida a partir de (4.27)
222)f(X.)f(H)f(Y (4.31)
em termos da densidade espectral de energia de entrada, X(f)2. Antes de concluir esta seção, cabe aqui uma observação quanto à nomenclatura utilizada neste e em outros textos. A resposta em frequência de um
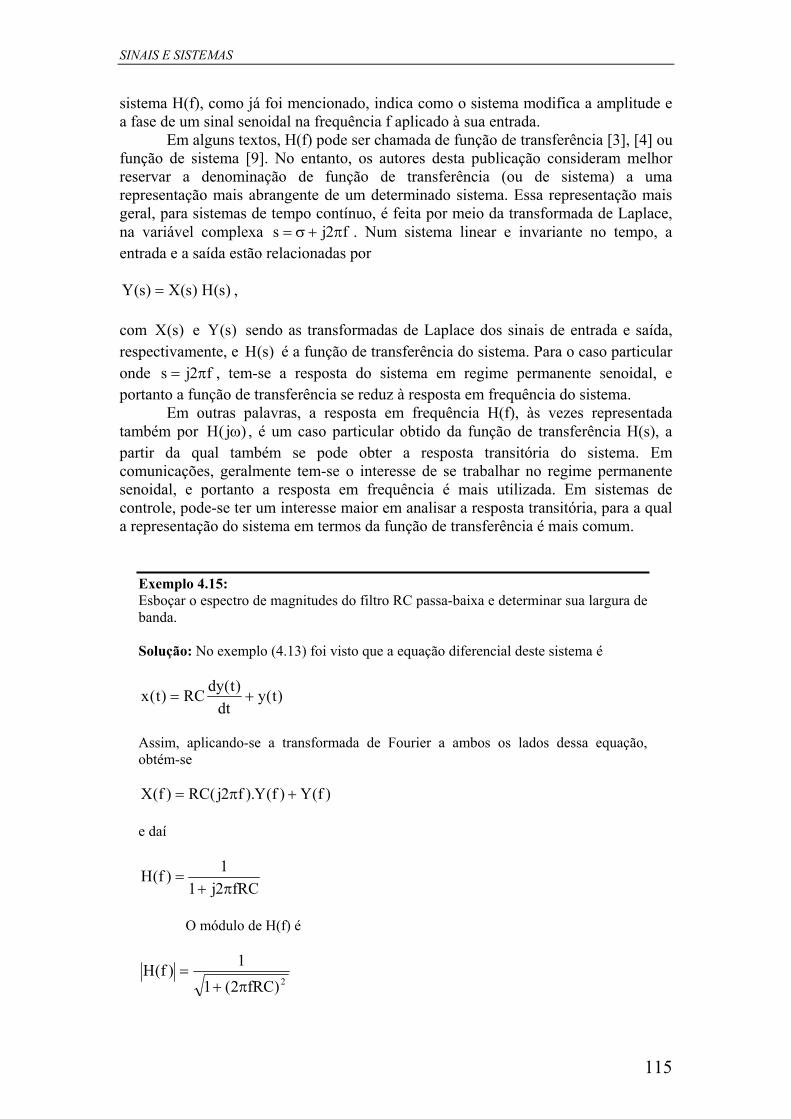
SINAIS E SISTEMAS
115
sistema H(f), como já foi mencionado, indica como o sistema modifica a amplitude e a fase de um sinal senoidal na frequência f aplicado à sua entrada. Em alguns textos, H(f) pode ser chamada de função de transferência [3], [4] ou função de sistema [9]. No entanto, os autores desta publicação consideram melhor reservar a denominação de função de transferência (ou de sistema) a uma representação mais abrangente de um determinado sistema. Essa representação mais geral, para sistemas de tempo contínuo, é feita por meio da transformada de Laplace, na variável complexa f2js . Num sistema linear e invariante no tempo, a entrada e a saída estão relacionadas por
)s(H)s(X)s(Y , com )s(X e )s(Y sendo as transformadas de Laplace dos sinais de entrada e saída, respectivamente, e )s(H é a função de transferência do sistema. Para o caso particular onde f2js , tem-se a resposta do sistema em regime permanente senoidal, e portanto a função de transferência se reduz à resposta em frequência do sistema.
Em outras palavras, a resposta em frequência H(f), às vezes representada também por )j(H , é um caso particular obtido da função de transferência H(s), a partir da qual também se pode obter a resposta transitória do sistema. Em comunicações, geralmente tem-se o interesse de se trabalhar no regime permanente senoidal, e portanto a resposta em frequência é mais utilizada. Em sistemas de controle, pode-se ter um interesse maior em analisar a resposta transitória, para a qual a representação do sistema em termos da função de transferência é mais comum.
Exemplo 4.15: Esboçar o espectro de magnitudes do filtro RC passa-baixa e determinar sua largura de banda. Solução: No exemplo (4.13) foi visto que a equação diferencial deste sistema é
)t(ydt
)t(dyRC)t(x
Assim, aplicando-se a transformada de Fourier a ambos os lados dessa equação, obtém-se
)f(Y)f(Y).f2j(RC)f(X e daí
fRC2j1
1)f(H
O módulo de H(f) é
2)fRC2(1
1)f(H
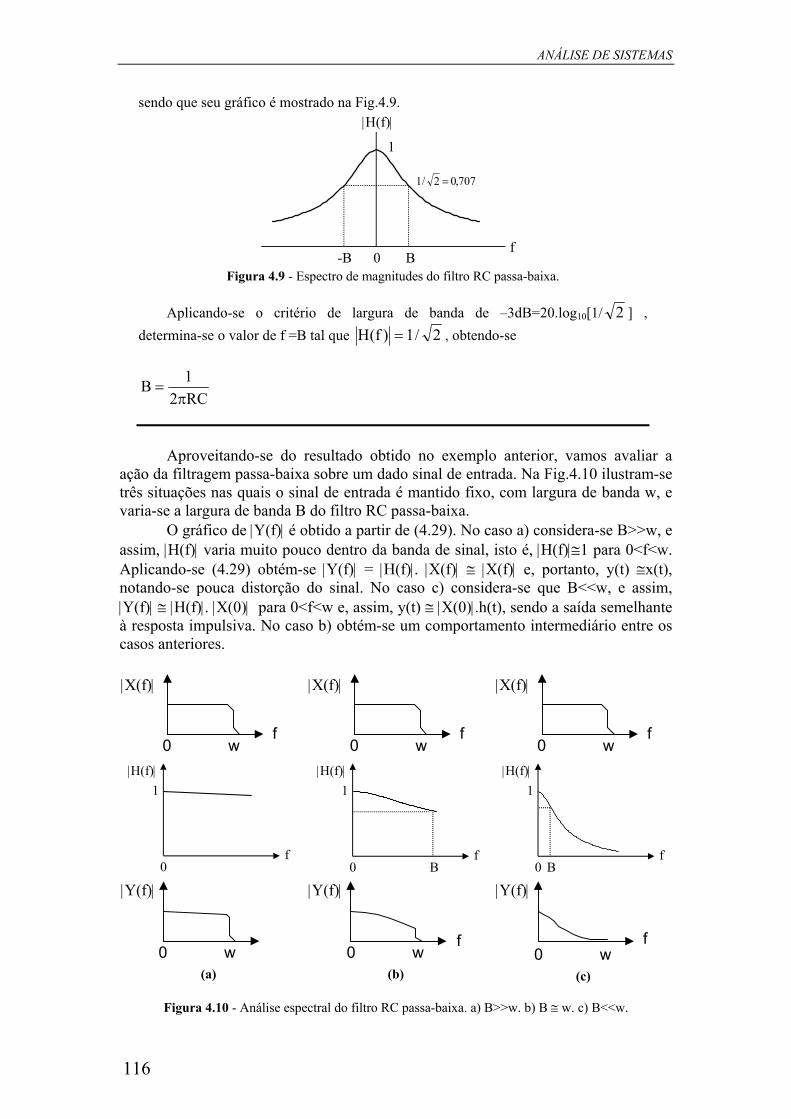
ANÁLISE DE SISTEMAS
116
sendo que seu gráfico é mostrado na Fig.4.9. H(f)
f0 B-B
1
707,02/1
Figura 4.9 - Espectro de magnitudes do filtro RC passa-baixa.
Aplicando-se o critério de largura de banda de –3dB=20.log10[1/ 2 ] ,
determina-se o valor de f =B tal que 2/1)f(H , obtendo-se
RC2
1B
Aproveitando-se do resultado obtido no exemplo anterior, vamos avaliar a ação da filtragem passa-baixa sobre um dado sinal de entrada. Na Fig.4.10 ilustram-se três situações nas quais o sinal de entrada é mantido fixo, com largura de banda w, e varia-se a largura de banda B do filtro RC passa-baixa.
O gráfico de Y(f) é obtido a partir de (4.29). No caso a) considera-se B>>w, e assim, H(f) varia muito pouco dentro da banda de sinal, isto é, H(f)1 para 0<f<w. Aplicando-se (4.29) obtém-se Y(f) = H(f). X(f) X(f) e, portanto, y(t) x(t), notando-se pouca distorção do sinal. No caso c) considera-se que B<<w, e assim, Y(f) H(f). X(0) para 0<f<w e, assim, y(t) X(0).h(t), sendo a saída semelhante à resposta impulsiva. No caso b) obtém-se um comportamento intermediário entre os casos anteriores.
X(f)
f0 w
X(f)
f0 w
X(f)
f0 w
H(f)
f0
1
H(f)
f0
1
B
H(f)
f0
1
B
0 w
Y(f)
(a)
f0 w
Y(f)
(b)
f0 w
Y(f)
(c)
Figura 4.10 - Análise espectral do filtro RC passa-baixa. a) B>>w. b) B w. c) B<<w.

SINAIS E SISTEMAS
117
Exemplo 4.16: Esboçar o sinal de saída do filtro RC passa-baixa quando o sinal de entrada for a porta
2/t
rect.A)t(x
Solução: Em primeiro lugar calcula-se a resposta impulsiva desse filtro, invertendo-se a transformada de Fourier H(f) obtida no exemplo 4.15. O leitor poderá verificar que
)t(ueRC
1
fRC2j1
RC.
RC
1)t(h RC/t1
sendo os gráficos de x(t) e h(t) mostrados na Fig.4.11.
x(t)
A
0t
(a)
h(t)
1/RC
0t
(b)
Figura 4.11 - Sinais para análise do filtro RC passa-baixa. a) Sinal de entrada. b) Resposta impusiva.
A partir de (4.19) sabe-se que o sinal de saída desse filtro é dado pela
convolução entre os sinais mostrados na Fig.4.11.
d)t(h)(x)t(h*)t(x)t(y
Encoraja-se o leitor a verificar que o resultado dessa convolução é
t,e).e1(A
t0),e1(A
0t,0
)t(yRC/)t(RC/t
RC/t
A título de ilustração, apresentam-se na Fig.4.12 alguns gráficos do sinal de saída, quando a constante RC é mantida fixa e varia-se a largura da porta .
y(t)
A
0 t
(a)
y(t)
A
0 t
(b)
y(t)
A
0 t
(c)
Figura 4.12 - Análise temporral do filtro RC passa-baixa. a) >> RC. b) RC. c) << RC.
Pela figura 4.12 a) percebe-se que, quando o valor da largura da porta for >> RC, o sinal de saída mantém alguma semelhança com o sinal de entrada original,
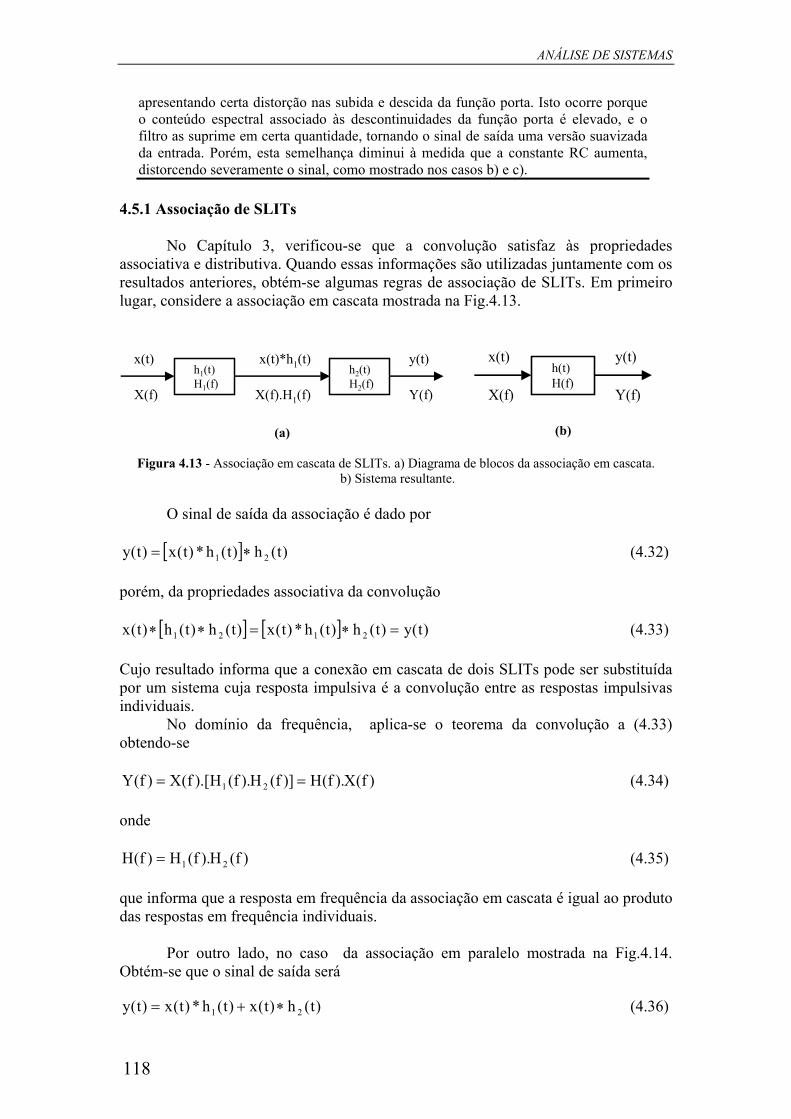
ANÁLISE DE SISTEMAS
118
apresentando certa distorção nas subida e descida da função porta. Isto ocorre porque o conteúdo espectral associado às descontinuidades da função porta é elevado, e o filtro as suprime em certa quantidade, tornando o sinal de saída uma versão suavizada da entrada. Porém, esta semelhança diminui à medida que a constante RC aumenta, distorcendo severamente o sinal, como mostrado nos casos b) e c).
4.5.1 Associação de SLITs
No Capítulo 3, verificou-se que a convolução satisfaz às propriedades associativa e distributiva. Quando essas informações são utilizadas juntamente com os resultados anteriores, obtém-se algumas regras de associação de SLITs. Em primeiro lugar, considere a associação em cascata mostrada na Fig.4.13.
h1(t)H1(f)
h2(t)H2(f)
x(t)
X(f)
x(t)*h1(t)
X(f).H1(f)
y(t)
Y(f)
(a)
h(t)H(f)
x(t)
X(f)
y(t)
Y(f)
(b)
Figura 4.13 - Associação em cascata de SLITs. a) Diagrama de blocos da associação em cascata.
b) Sistema resultante.
O sinal de saída da associação é dado por
)t(h)t(h*)t(x)t(y 21 (4.32) porém, da propriedades associativa da convolução
)t(y)t(h)t(h*)t(x)t(h)t(h)t(x 2121 (4.33) Cujo resultado informa que a conexão em cascata de dois SLITs pode ser substituída por um sistema cuja resposta impulsiva é a convolução entre as respostas impulsivas individuais. No domínio da frequência, aplica-se o teorema da convolução a (4.33) obtendo-se
)f(X).f(H)]f(H).f(H).[f(X)f(Y 21 (4.34) onde
)f(H).f(H)f(H 21 (4.35) que informa que a resposta em frequência da associação em cascata é igual ao produto das respostas em frequência individuais.
Por outro lado, no caso da associação em paralelo mostrada na Fig.4.14. Obtém-se que o sinal de saída será
)t(h)t(x)t(h*)t(x)t(y 21 (4.36)
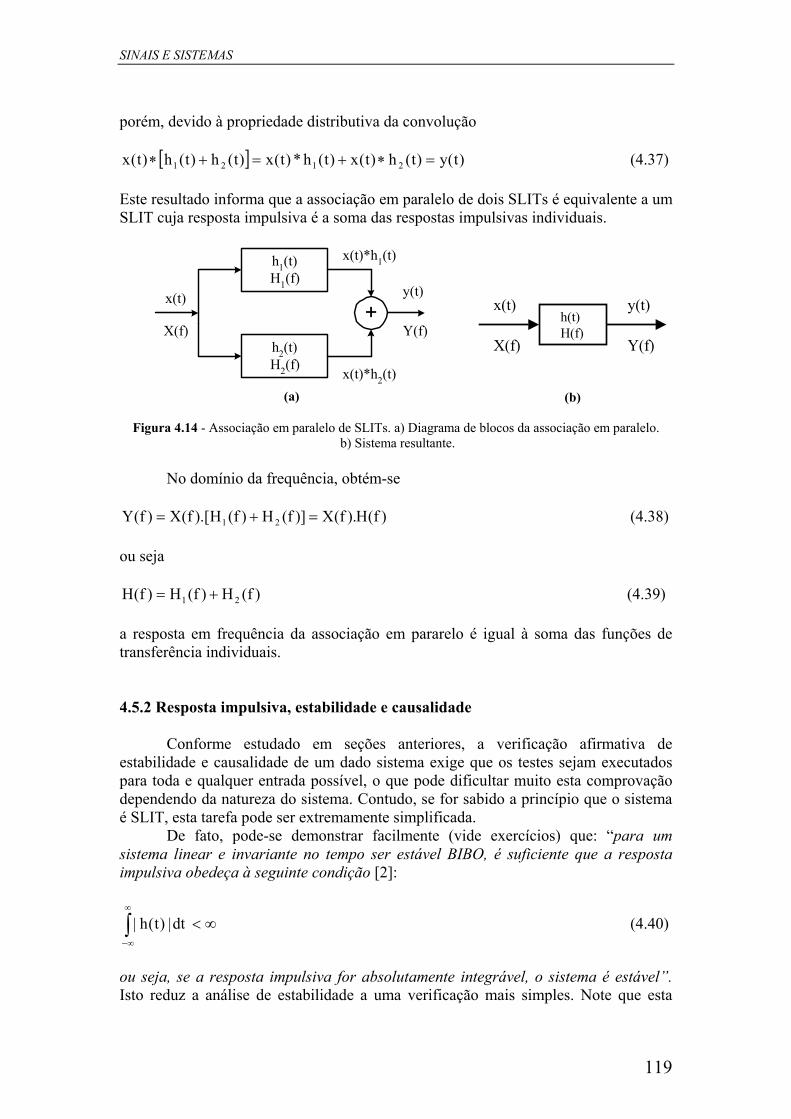
SINAIS E SISTEMAS
119
porém, devido à propriedade distributiva da convolução
)t(y)t(h)t(x)t(h*)t(x)t(h)t(h)t(x 2121 (4.37) Este resultado informa que a associação em paralelo de dois SLITs é equivalente a um SLIT cuja resposta impulsiva é a soma das respostas impulsivas individuais.
h1(t)H1(f)
h2(t)H2(f)
+
x(t)*h1(t)
x(t)*h2(t)
x(t)
X(f)
y(t)
Y(f)
(a)
h(t)H(f)
x(t)
X(f)
y(t)
Y(f)
(b)
Figura 4.14 - Associação em paralelo de SLITs. a) Diagrama de blocos da associação em paralelo. b) Sistema resultante.
No domínio da frequência, obtém-se
)f(H).f(X)]f(H)f(H).[f(X)f(Y 21 (4.38) ou seja
)f(H)f(H)f(H 21 (4.39) a resposta em frequência da associação em pararelo é igual à soma das funções de transferência individuais. 4.5.2 Resposta impulsiva, estabilidade e causalidade Conforme estudado em seções anteriores, a verificação afirmativa de estabilidade e causalidade de um dado sistema exige que os testes sejam executados para toda e qualquer entrada possível, o que pode dificultar muito esta comprovação dependendo da natureza do sistema. Contudo, se for sabido a princípio que o sistema é SLIT, esta tarefa pode ser extremamente simplificada.
De fato, pode-se demonstrar facilmente (vide exercícios) que: “para um sistema linear e invariante no tempo ser estável BIBO, é suficiente que a resposta impulsiva obedeça à seguinte condição [2]:
dt|)t(h| (4.40)
ou seja, se a resposta impulsiva for absolutamente integrável, o sistema é estável”. Isto reduz a análise de estabilidade a uma verificação mais simples. Note que esta

ANÁLISE DE SISTEMAS
120
também é uma condição suficiente para a existência da transformada de Fourier de )t(h .
Relativamente à causalidade, pode ser demonstrado que: “a condição necessária e suficiente para que um SLIT seja causal é que sua resposta impulsiva, h(t), seja zero para t<0.” Ressalta-se que, a aplicação desta propriedade exige que h(t) possa ser determinada ou que seja conhecida previamente. Entretanto, nos casos onde h(t) é de difícil obtenção, porém, H(f) é conhecida, pode-se aplicar o critério de Paley-Wiener, que estabelece que: “a condição necessária para que um SLIT seja causal é que H(f) satisfaça a
0df)f2(1
)f(H2
ln e
df)f(H
2. ” (4.41)
Observe que este critério não satisfaz à condição de suficiência, uma vez que
não leva em conta a fase de H(f), mas apenas o módulo H(f). Assim, podemos ter valores de H(f) idênticos, porém, com fases diferentes, sendo que um conduz a um sistema causal e outro não. 4.6 TRANSMISSÃO SEM DISTORÇÃO
Considere o caso em que se deseja transmitir um sinal x(t) de um ponto a outro, através de um SLIT, sem distorção. Isto significa que a saída do sistema deve ter o mesmo formato da entrada, ou seja: y t K x t t d( ) ( ) (4.42) onde K é uma constante e td um atraso. Analisando a expressão no domínio da frequência: Y f K X f e j f td( ) ( ) 2 de onde se conclui que a resposta em frequência de um SLIT que não introduz distorção é:
H fY f
X fK e j f t d( )
( )
( ) 2 (4.43)
e
dtf2)]f(Harg[
K)f(H
(4.44)
ou seja, H(f) é um sistema com amplitude constante e fase linear. Na Fig.4.15 estão especificadas as características espectrais, de módulo e fase, de um sistema sem distorção.
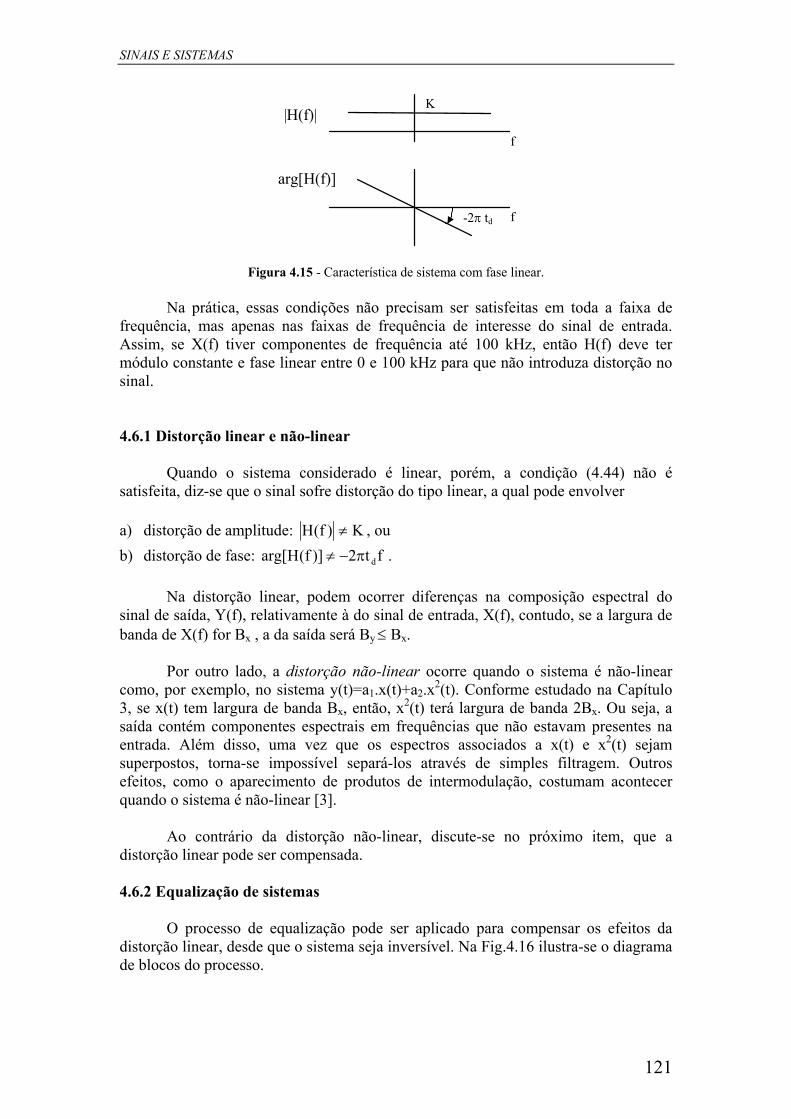
SINAIS E SISTEMAS
121
|H(f)|K
arg[H(f)]
f
f-2 td
Figura 4.15 - Característica de sistema com fase linear.
Na prática, essas condições não precisam ser satisfeitas em toda a faixa de frequência, mas apenas nas faixas de frequência de interesse do sinal de entrada. Assim, se X(f) tiver componentes de frequência até 100 kHz, então H(f) deve ter módulo constante e fase linear entre 0 e 100 kHz para que não introduza distorção no sinal. 4.6.1 Distorção linear e não-linear Quando o sistema considerado é linear, porém, a condição (4.44) não é satisfeita, diz-se que o sinal sofre distorção do tipo linear, a qual pode envolver a) distorção de amplitude: K)f(H , ou
b) distorção de fase: ft2)]f(Harg[ d .
Na distorção linear, podem ocorrer diferenças na composição espectral do
sinal de saída, Y(f), relativamente à do sinal de entrada, X(f), contudo, se a largura de banda de X(f) for Bx , a da saída será By Bx.
Por outro lado, a distorção não-linear ocorre quando o sistema é não-linear
como, por exemplo, no sistema y(t)=a1.x(t)+a2.x2(t). Conforme estudado na Capítulo
3, se x(t) tem largura de banda Bx, então, x2(t) terá largura de banda 2Bx. Ou seja, a saída contém componentes espectrais em frequências que não estavam presentes na entrada. Além disso, uma vez que os espectros associados a x(t) e x2(t) sejam superpostos, torna-se impossível separá-los através de simples filtragem. Outros efeitos, como o aparecimento de produtos de intermodulação, costumam acontecer quando o sistema é não-linear [3].
Ao contrário da distorção não-linear, discute-se no próximo item, que a
distorção linear pode ser compensada. 4.6.2 Equalização de sistemas O processo de equalização pode ser aplicado para compensar os efeitos da distorção linear, desde que o sistema seja inversível. Na Fig.4.16 ilustra-se o diagrama de blocos do processo.
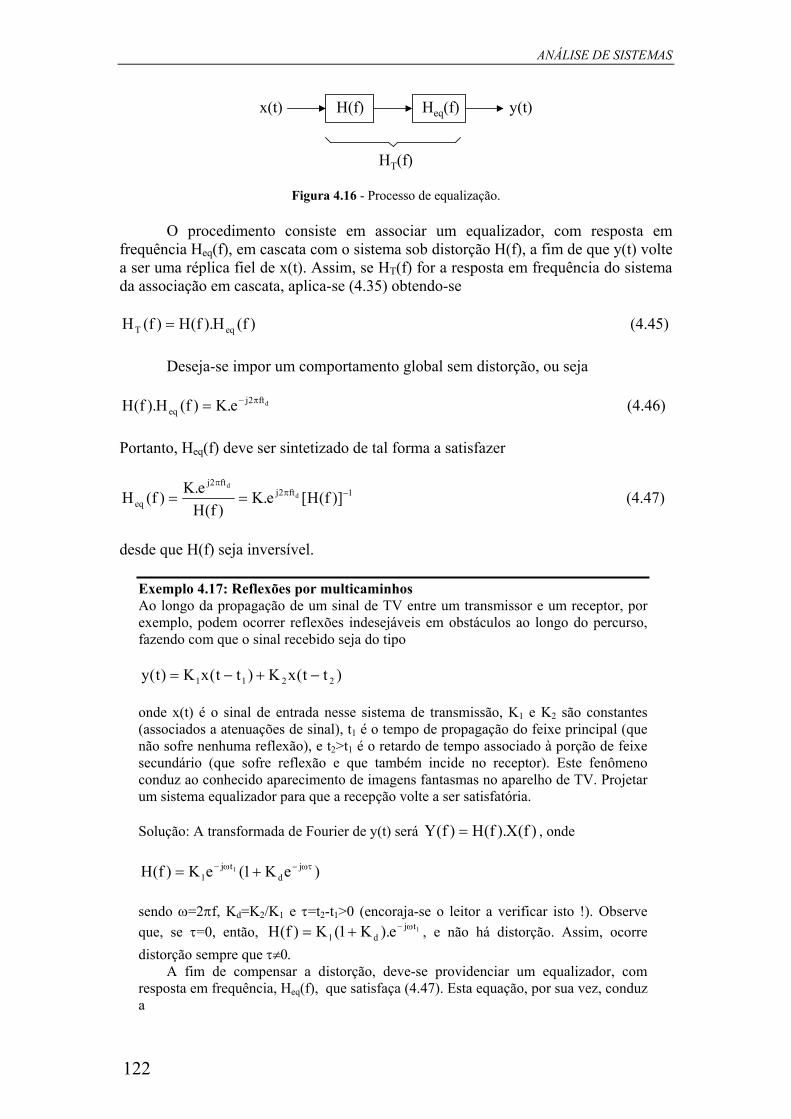
ANÁLISE DE SISTEMAS
122
H(f) Heq(f) y(t)x(t)
HT(f)
Figura 4.16 - Processo de equalização.
O procedimento consiste em associar um equalizador, com resposta em frequência Heq(f), em cascata com o sistema sob distorção H(f), a fim de que y(t) volte a ser uma réplica fiel de x(t). Assim, se HT(f) for a resposta em frequência do sistema da associação em cascata, aplica-se (4.35) obtendo-se
)f(H).f(H)f(H eqT (4.45)
Deseja-se impor um comportamento global sem distorção, ou seja
dft2j
eq e.K)f(H).f(H (4.46)
Portanto, Heq(f) deve ser sintetizado de tal forma a satisfazer
1ft2jft2j
eq )]f(H[e.K)f(H
e.K)f(H d
d
(4.47)
desde que H(f) seja inversível.
Exemplo 4.17: Reflexões por multicaminhos Ao longo da propagação de um sinal de TV entre um transmissor e um receptor, por exemplo, podem ocorrer reflexões indesejáveis em obstáculos ao longo do percurso, fazendo com que o sinal recebido seja do tipo
)tt(xK)tt(xK)t(y 2211 onde x(t) é o sinal de entrada nesse sistema de transmissão, K1 e K2 são constantes (associados a atenuações de sinal), t1 é o tempo de propagação do feixe principal (que não sofre nenhuma reflexão), e t2>t1 é o retardo de tempo associado à porção de feixe secundário (que sofre reflexão e que também incide no receptor). Este fenômeno conduz ao conhecido aparecimento de imagens fantasmas no aparelho de TV. Projetar um sistema equalizador para que a recepção volte a ser satisfatória. Solução: A transformada de Fourier de y(t) será )f(X).f(H)f(Y , onde
)eK1(eK)f(H jd
tj1
1
sendo =2f, Kd=K2/K1 e =t2-t1>0 (encoraja-se o leitor a verificar isto !). Observe
que, se =0, então, 1tjd1 e).K1(K)f(H , e não há distorção. Assim, ocorre
distorção sempre que A fim de compensar a distorção, deve-se providenciar um equalizador, com resposta em frequência, Heq(f), que satisfaça (4.47). Esta equação, por sua vez, conduz a

SINAIS E SISTEMAS
123
)f(H
1e.K)f(H
eq
tj d
Assim, comparando-se as duas expressões de H(f) acima, verifica-se que a compensação acontecerá desde que K=K1, td=t1 e
jd
eq eK1
1)f(H
Nos casos onde a intensidade da reflexão seja baixa (K2<<K1), ocorre Kd<<1,
e Heq(f) pode ser expandida numa série binomial: 1a...,aa1a1
1 2
,
gerando-se
]e.KKe[e
e.Ke.K1)f(Hj2
ddjj
2j2d
jdeq
onde utilizou-se apenas os três primeiros termos da série. Na Fig.4.17 ilustra-se uma forma de sintetizar Heq(f) descrito acima, usando-se blocos elementares, cuja estrutura é conhecida como filtro ou equalizador transversal.
e-j e-j
-Kd Kd
+ +
DEFASADOR DEFASADOR
AMPLIFICADOR NÃO-INVERSOR
2 AMPLIFICADOR INVERSOR
EQUALIZADOR
Figura 4.17 - Diagrama de blocos do equalizador transversal. Neste exemplo, trabalhou-se com apenas três elementos da série de potência. Para uma maior equalização, pode-se trabalhar com mais elementos, o que implica em acrescentar mais defasadores, amplificadores e somadores no diagrama da Fig.4.17, segundo a seguinte relação de recorrência: o próximo amplificador, deve ser inversor
com ganho 3dK , o próximo tem ganho 4
dK , e assim por diante.
4.7 FILTROS IDEAIS Em seções anteriores já se comentou sobre o papel dos filtros no processamento de sinais como, por exemplo, o filtro RC passa-baixa. De modo geral, filtros são sistemas (ou redes) que exibem características seletivas em frequência. O estudo de filtros deve ser realizado em disciplinas específicas do curso de engenharia elétrica, por isso, não serão enfatizados neste texto. Contudo, uma classe de filtros que merece grande atenção é a dos filtros ideais, que possuem características de transmissão sem distorção ao longo da banda
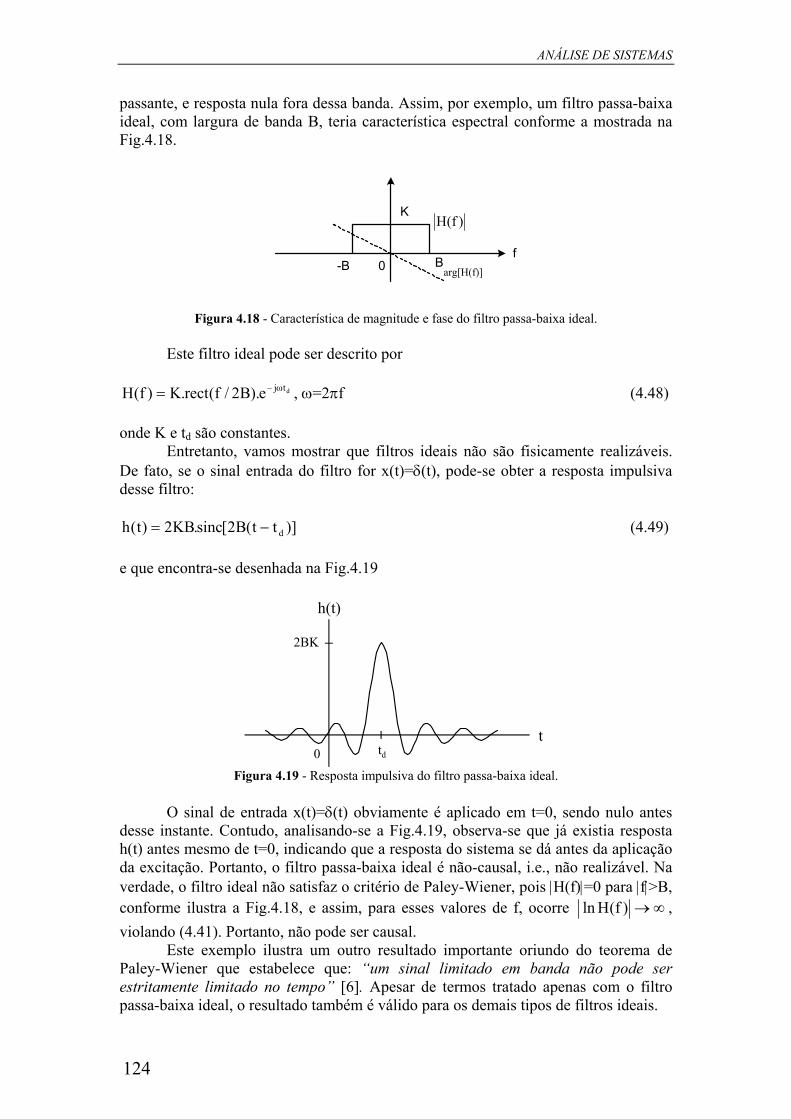
ANÁLISE DE SISTEMAS
124
passante, e resposta nula fora dessa banda. Assim, por exemplo, um filtro passa-baixa ideal, com largura de banda B, teria característica espectral conforme a mostrada na Fig.4.18.
B-B
K)f(H
arg[H(f)]0f
Figura 4.18 - Característica de magnitude e fase do filtro passa-baixa ideal.
Este filtro ideal pode ser descrito por
dtje).B2/f(rect.K)f(H , =2f (4.48) onde K e td são constantes. Entretanto, vamos mostrar que filtros ideais não são fisicamente realizáveis. De fato, se o sinal entrada do filtro for x(t)=(t), pode-se obter a resposta impulsiva desse filtro:
)]tt(B2[sinc.KB2)t(h d (4.49)
e que encontra-se desenhada na Fig.4.19
0 td
t
h(t)
2BK
Figura 4.19 - Resposta impulsiva do filtro passa-baixa ideal. O sinal de entrada x(t)=(t) obviamente é aplicado em t=0, sendo nulo antes desse instante. Contudo, analisando-se a Fig.4.19, observa-se que já existia resposta h(t) antes mesmo de t=0, indicando que a resposta do sistema se dá antes da aplicação da excitação. Portanto, o filtro passa-baixa ideal é não-causal, i.e., não realizável. Na verdade, o filtro ideal não satisfaz o critério de Paley-Wiener, pois H(f)=0 para f>B, conforme ilustra a Fig.4.18, e assim, para esses valores de f, ocorre )f(Hln ,
violando (4.41). Portanto, não pode ser causal. Este exemplo ilustra um outro resultado importante oriundo do teorema de Paley-Wiener que estabelece que: “um sinal limitado em banda não pode ser estritamente limitado no tempo” [6]. Apesar de termos tratado apenas com o filtro passa-baixa ideal, o resultado também é válido para os demais tipos de filtros ideais.
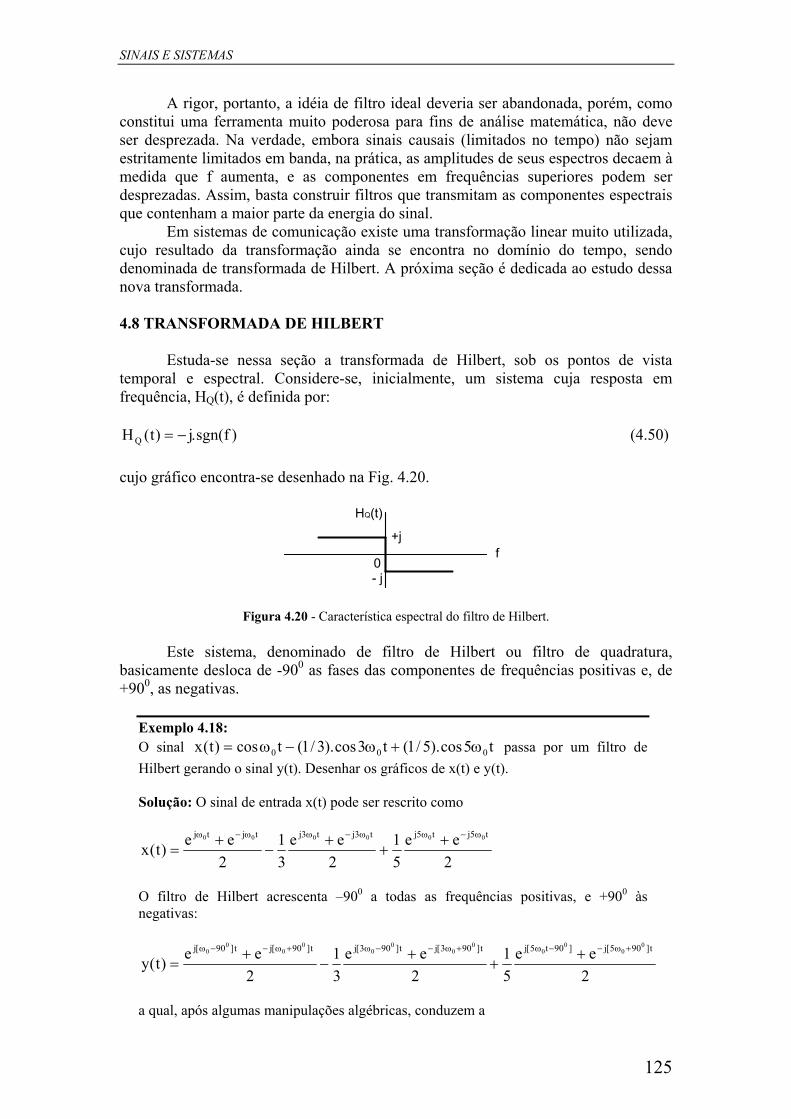
SINAIS E SISTEMAS
125
A rigor, portanto, a idéia de filtro ideal deveria ser abandonada, porém, como constitui uma ferramenta muito poderosa para fins de análise matemática, não deve ser desprezada. Na verdade, embora sinais causais (limitados no tempo) não sejam estritamente limitados em banda, na prática, as amplitudes de seus espectros decaem à medida que f aumenta, e as componentes em frequências superiores podem ser desprezadas. Assim, basta construir filtros que transmitam as componentes espectrais que contenham a maior parte da energia do sinal. Em sistemas de comunicação existe uma transformação linear muito utilizada, cujo resultado da transformação ainda se encontra no domínio do tempo, sendo denominada de transformada de Hilbert. A próxima seção é dedicada ao estudo dessa nova transformada. 4.8 TRANSFORMADA DE HILBERT Estuda-se nessa seção a transformada de Hilbert, sob os pontos de vista temporal e espectral. Considere-se, inicialmente, um sistema cuja resposta em frequência, HQ(t), é definida por:
)fsgn(.j)t(HQ (4.50)
cujo gráfico encontra-se desenhado na Fig. 4.20.
HQ(t)
+j
- j0
f
Figura 4.20 - Característica espectral do filtro de Hilbert. Este sistema, denominado de filtro de Hilbert ou filtro de quadratura, basicamente desloca de -900 as fases das componentes de frequências positivas e, de +900, as negativas.
Exemplo 4.18: O sinal t5cos).5/1(t3cos).3/1(tcos)t(x 000 passa por um filtro de
Hilbert gerando o sinal y(t). Desenhar os gráficos de x(t) e y(t). Solução: O sinal de entrada x(t) pode ser rescrito como
2
ee
5
1
2
ee
3
1
2
ee)t(x
t5jt5jt3jt3jtjtj 000000
O filtro de Hilbert acrescenta –900 a todas as frequências positivas, e +900 às negativas:
2
ee
5
1
2
ee
3
1
2
ee)t(y
t]905[j]90t5[jt]903[jt]903[jt]90[jt]90[j 00
00
00
00
00
00
a qual, após algumas manipulações algébricas, conduzem a

ANÁLISE DE SISTEMAS
126
t5sen).5/1(t3sen).3/1(tsen)t(y 000
cujo gráfico encontra-se desenhado na Fig.4.21.
-1.00
-0.50
0.00
0.50
1.00
x(t)
t
(a)
-2.00
-1.00
0.00
1.00
2.00
y(t)
(b)
Figura 4.21 - Ação do filtro de Hilbet sobre um sinal. a) Sinal de entrada x(t).
b) Sinal de saída y(t). Como se observa através da figura, o filtro de Hilbert introduz uma distorção linear sobre o sinal de entrada, fazendo com que a uma onda aproximadamente quadrada se transforme numa onda aproximadamente triangular. De fato, pode ser mostrado que o filtro de Hilbert introduz picos na sua saída sempre que na entrada ocorram descontinuidades do tipo degrau.
A transformada de Fourier inversa de HQ(f) corresponde à resposta impulsiva do filtro de Hilbert, e pode ser obtida recorrendo-se aos teoremas da diferenciação e da dualidade. Assim, se X(f) é a transformada de Fourier de x(t), conclui-se que
df
)f(dx
df
)f(dx)]t(tX2j[
(4.51)
a partir da qual obtém-se
]df
)f(dx[
t2
j)t(X 1
(4.52)
A seguir, efetua-se uma mudança no nome da função temporal X(t) para hQ(t). Assim, torna-se natural trocar o nome de x(f) para HQ(f), tal que hQ(t) e HQ(f) formem um par de transformadas de Fourier. Portanto,

SINAIS E SISTEMAS
127
]df
)f(dH[
t2
j)t(h Q1
Q
(4.53)
Escrevendo-se HQ(f) mostrada na Fig.4.20, numa forma mais adequada:
j)f(u2j)fsgn(.j)f(HQ (4.54)
e substituindo-se (4.54) em (4.53), obtém-se
)t(.2jt2
j
df
)f(du2j
t2
j)t(h 11
Q
(4.55)
e daí, finalmente
t
1)t(hQ (4.56)
é a resposta impulsiva do filtro de Hilbert. Considere-se, agora, a resposta de um sistema cuja resposta impulsiva é hQ(t), a uma entrada arbitrária v(t). Se )t(v corresponder a esta saída, sabe-se, da teoria de sistemas lineares invariantes no tempo, que
)t(v*)t(h)t(v Q (4.57)
Substituindo-se hQ(t) e explicitando a integral de convolução, obtém-se
d
t
)(v1)t(v (4.58)
A integral (4.58) corresponde à transformada de Hilbert ou conjugada
harmônica da função v(t), e também constitui uma função no domínio do tempo. Com uma mudança de variável, de t- para , (4.58) converte-se em
d
)t(v1)t(v (4.59)
uma forma alternativa para calcular a transformada de Hilbert.
Exemplo 4.19: Calcular a transformada de Hilbert da função )tcos(.A)t(v Solução: Aplicando-se a definição (4.59) e desenvolvendo o seno da soma,
d.
sen).tsen(cos).tcos(A)t(v
Esta integral pode ser avaliada, lembrando-se que

ANÁLISE DE SISTEMAS
128
0 2
dx.x
xsen
e que f(x)=cos(x)/x é uma função ímpar, e assim, sua integral entre - e + é nula. Portanto,
)tsen(.A)t(v
A partir desse exemplo, conclui-se que a transformada de Hilbert de uma co-senóide equivale simplesmente a acrescentar –900 ao seu argumento, isto é:
A cost = A cos(t) = A sen (t) (4.60)
Este resultado já devia ser esperado no caso da função senoidal, em vista da
própria definição da função de resposta em frequência, e da definição de HQ(t), que defasa de –900 as componentes de frequência positivas. Entretanto, ressalta-se que esta propriedade não é válida para sinais arbitrários, os quais devem obedecer a (4.58) ou (4.59).
Exemplo 4.20: Calcular a transformada de Hilbert da função )tsen(.A)t(v Solução: Utilizando-se o resultado do exemplo 4.19, obtém-se
A sent = A cos(t) = - A cos (t)= Acost
A seguir, apresentam-se algumas propriedades da transformada de Hilbert, cujas demonstrações são deixadas a cargo do leitor, como exercício: a)
v(t) = - v(t)
(4.61a)
b) v(t)+.w(t) = v(t) + . w(t)
(4.61b)
c) vtvt ^
(4.61c)
d) )t(v
dt
d
dt
)t(vdn
n
n
n
(4.61d)
Além dessas, também é importante a propriedade de otogonalidade entre v(t) e
)t(v , que estabelece que
0dt)t(v).t(v
(4.62 a)
0dt)t(v).t(vT
1lim
2/T
2/TT
(4.62 b)

SINAIS E SISTEMAS
129
para sinais de energia e de potência, respectivamente. Pode-se demonstrar também, que a energia pode ser avaliada, alternativamente, em termos da transformada de Hilbert:
dt)t(vdt)t(vE
22
v (4.63)
Na Tabela 4.1 são apresentados pares de transformada de Hilbert para algumas funções consideradas relevantes:
Tabela 4.1. Pares de transformada de Hilbert
Função
Transformada de Hilbert
A 0
t
1
)t(
)tsen( 0 )tcos( 0
)t(sin )t(sinc.t
2
1 2
tj 0e tj 0ej
(t)
t
1
)t( 22
)t(
t22
)1/t(rect
1t2
1t2ln
1
Por fim, cita-se o importante teorema da transformada de Hilbert para o produto de duas funções: “Se v(t) e w(t) são sinais disjuntos em frequência, onde w(t) é passa-baixa e v(t) é passa-alta, então
w(t).v(t) )t(v).t(w
(4.64)
Exemplo 4.21: Transformada de Hilbert do sinal modulado Dado w(t) um sinal passa-baixa com W)f)=0 para f > , calcular a transformada de Hilbert do sinal modulado )tcos().t(w p , para fp>.
Solução: Na Fig. 4.22 foram esboçados os espectros de w(t) e de cos(pt), evidenciando que são disjuntos em frequência desde que fp>.
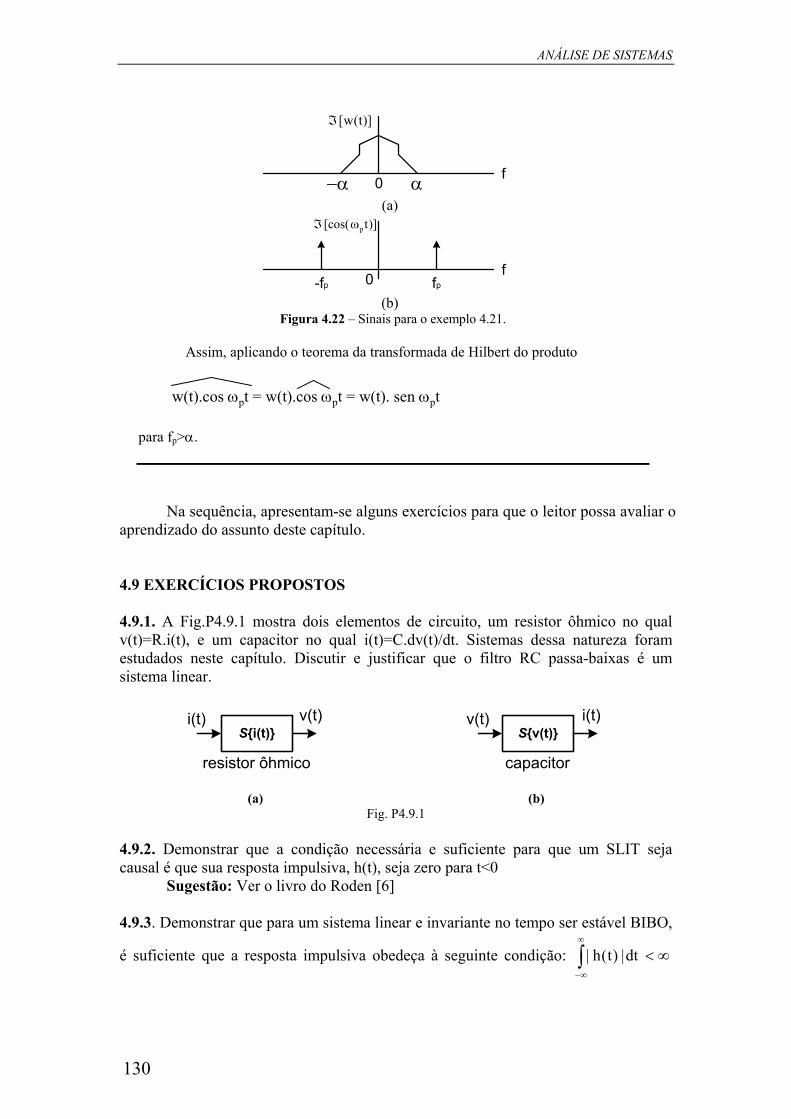
ANÁLISE DE SISTEMAS
130
f0
)]t(w[
(a)
f0 fp-fp
)]t[cos( p
(b)
Figura 4.22 – Sinais para o exemplo 4.21.
Assim, aplicando o teorema da transformada de Hilbert do produto
w(t).cos pt = w(t).cos pt = w(t). sen pt para fp>.
Na sequência, apresentam-se alguns exercícios para que o leitor possa avaliar o aprendizado do assunto deste capítulo.
4.9 EXERCÍCIOS PROPOSTOS 4.9.1. A Fig.P4.9.1 mostra dois elementos de circuito, um resistor ôhmico no qual v(t)=R.i(t), e um capacitor no qual i(t)=C.dv(t)/dt. Sistemas dessa natureza foram estudados neste capítulo. Discutir e justificar que o filtro RC passa-baixas é um sistema linear.
S{i(t)}i(t) v(t)
resistor ôhmico
(a)
S{v(t)}v(t) i(t)
capacitor
(b) Fig. P4.9.1
4.9.2. Demonstrar que a condição necessária e suficiente para que um SLIT seja causal é que sua resposta impulsiva, h(t), seja zero para t<0 Sugestão: Ver o livro do Roden [6] 4.9.3. Demonstrar que para um sistema linear e invariante no tempo ser estável BIBO,
é suficiente que a resposta impulsiva obedeça à seguinte condição:
dt|)t(h|
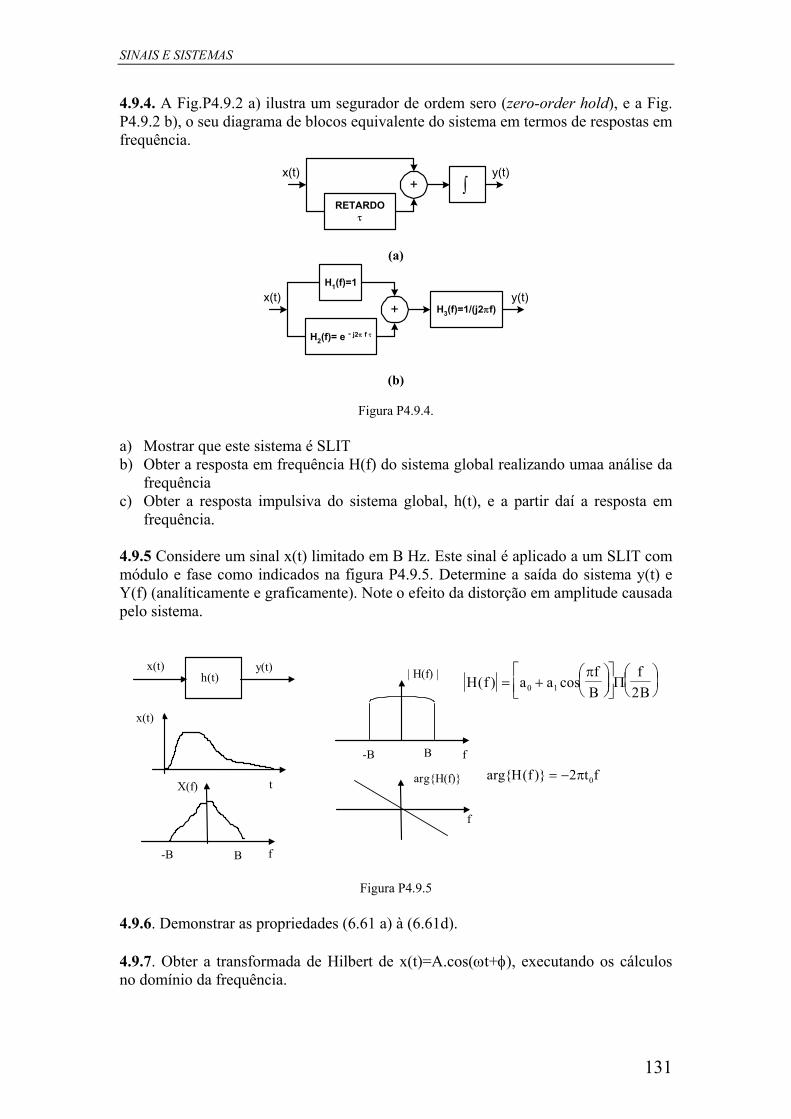
SINAIS E SISTEMAS
131
4.9.4. A Fig.P4.9.2 a) ilustra um segurador de ordem sero (zero-order hold), e a Fig. P4.9.2 b), o seu diagrama de blocos equivalente do sistema em termos de respostas em frequência.
RETARDO
+ x(t) y(t)
(a)
H2(f)= e - j2 f
+ H3(f)=1/(j2f)x(t) y(t)
H1(f)=1
(b)
Figura P4.9.4.
a) Mostrar que este sistema é SLIT b) Obter a resposta em frequência H(f) do sistema global realizando umaa análise da
frequência c) Obter a resposta impulsiva do sistema global, h(t), e a partir daí a resposta em
frequência. 4.9.5 Considere um sinal x(t) limitado em B Hz. Este sinal é aplicado a um SLIT com módulo e fase como indicados na figura P4.9.5. Determine a saída do sistema y(t) e Y(f) (analíticamente e graficamente). Note o efeito da distorção em amplitude causada pelo sistema.
x(t) y(t)h(t)
x(t)
X(f) t
-B B f
-B B f
f
| H(f) |
arg{H(f)}
H f a af
B
f
B( ) cos
0 1 2
arg{ ( )}H f t f 2 0
Figura P4.9.5
4.9.6. Demonstrar as propriedades (6.61 a) à (6.61d). 4.9.7. Obter a transformada de Hilbert de x(t)=A.cos(t+), executando os cálculos no domínio da frequência.

ANÁLISE DE SISTEMAS
132
4.9.8. Demonstrar o teorema da transformada de Hilbert (4.64) do produto de duas funções disjuntas em frequência. 4.9.9. Seja a função retangular )]t(u)t(u[A)t(v a) Esboçar o gráfico de v(t);
b) Usando a definição, demonstrar que t
tln
A)t(v
;
c) Esboçar o gráfico de )t(v . Sugestão: Ver o livro do Carlson [3].
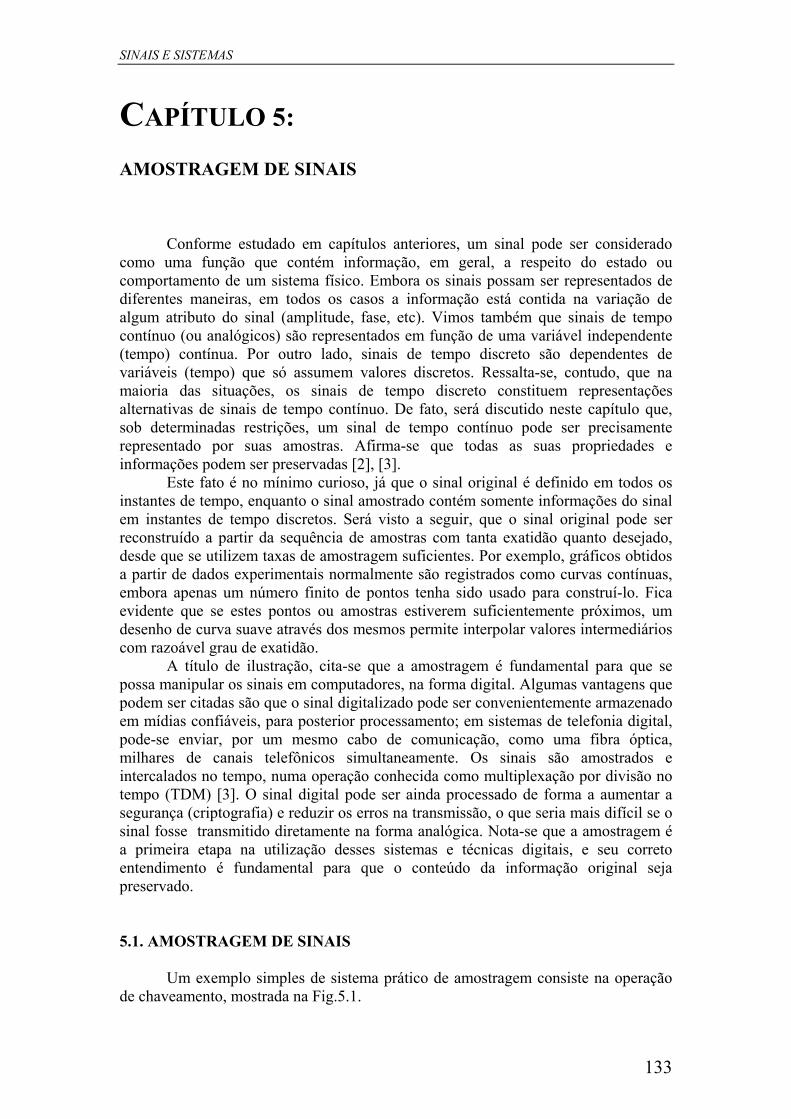
SINAIS E SISTEMAS
133
CAPÍTULO 5: AMOSTRAGEM DE SINAIS Conforme estudado em capítulos anteriores, um sinal pode ser considerado como uma função que contém informação, em geral, a respeito do estado ou comportamento de um sistema físico. Embora os sinais possam ser representados de diferentes maneiras, em todos os casos a informação está contida na variação de algum atributo do sinal (amplitude, fase, etc). Vimos também que sinais de tempo contínuo (ou analógicos) são representados em função de uma variável independente (tempo) contínua. Por outro lado, sinais de tempo discreto são dependentes de variáveis (tempo) que só assumem valores discretos. Ressalta-se, contudo, que na maioria das situações, os sinais de tempo discreto constituem representações alternativas de sinais de tempo contínuo. De fato, será discutido neste capítulo que, sob determinadas restrições, um sinal de tempo contínuo pode ser precisamente representado por suas amostras. Afirma-se que todas as suas propriedades e informações podem ser preservadas [2], [3]. Este fato é no mínimo curioso, já que o sinal original é definido em todos os instantes de tempo, enquanto o sinal amostrado contém somente informações do sinal em instantes de tempo discretos. Será visto a seguir, que o sinal original pode ser reconstruído a partir da sequência de amostras com tanta exatidão quanto desejado, desde que se utilizem taxas de amostragem suficientes. Por exemplo, gráficos obtidos a partir de dados experimentais normalmente são registrados como curvas contínuas, embora apenas um número finito de pontos tenha sido usado para construí-lo. Fica evidente que se estes pontos ou amostras estiverem suficientemente próximos, um desenho de curva suave através dos mesmos permite interpolar valores intermediários com razoável grau de exatidão. A título de ilustração, cita-se que a amostragem é fundamental para que se possa manipular os sinais em computadores, na forma digital. Algumas vantagens que podem ser citadas são que o sinal digitalizado pode ser convenientemente armazenado em mídias confiáveis, para posterior processamento; em sistemas de telefonia digital, pode-se enviar, por um mesmo cabo de comunicação, como uma fibra óptica, milhares de canais telefônicos simultaneamente. Os sinais são amostrados e intercalados no tempo, numa operação conhecida como multiplexação por divisão no tempo (TDM) [3]. O sinal digital pode ser ainda processado de forma a aumentar a segurança (criptografia) e reduzir os erros na transmissão, o que seria mais difícil se o sinal fosse transmitido diretamente na forma analógica. Nota-se que a amostragem é a primeira etapa na utilização desses sistemas e técnicas digitais, e seu correto entendimento é fundamental para que o conteúdo da informação original seja preservado. 5.1. AMOSTRAGEM DE SINAIS
Um exemplo simples de sistema prático de amostragem consiste na operação de chaveamento, mostrada na Fig.5.1.
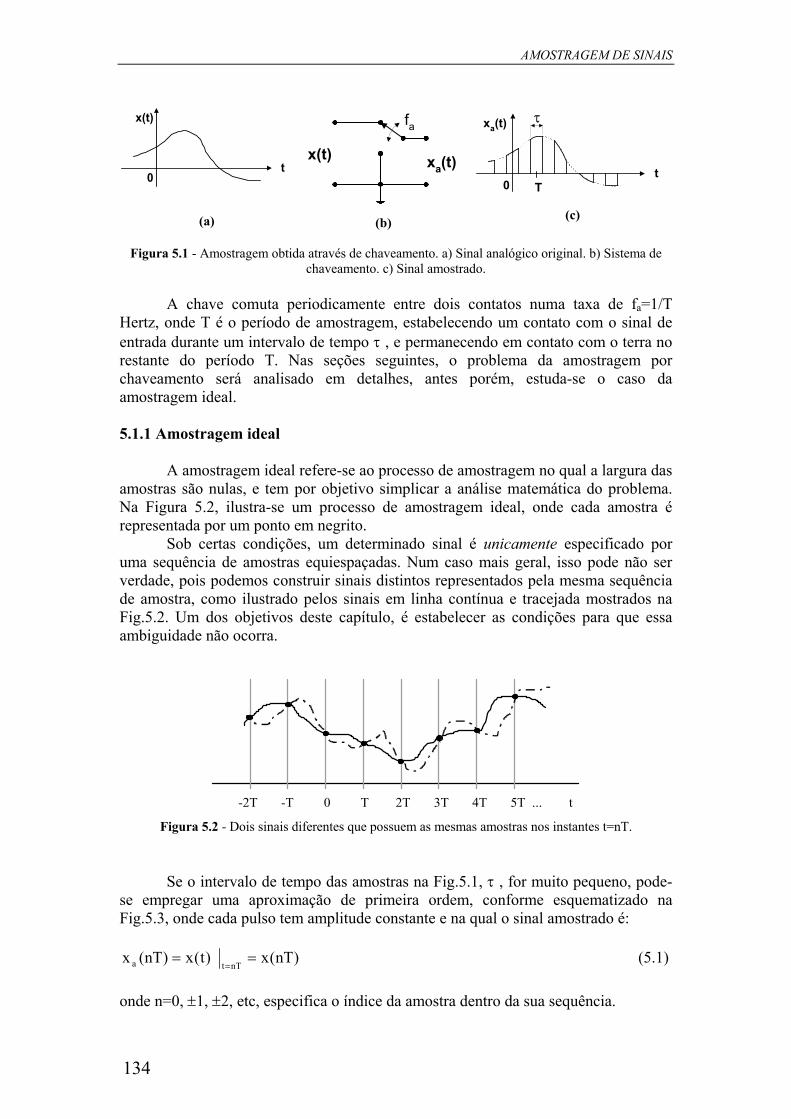
AMOSTRAGEM DE SINAIS
134
x(t)
t0
(a)
x(t) xa(t)
fa
(b)
xa(t)
t0
T
(c)
Figura 5.1 - Amostragem obtida através de chaveamento. a) Sinal analógico original. b) Sistema de
chaveamento. c) Sinal amostrado.
A chave comuta periodicamente entre dois contatos numa taxa de fa=1/T Hertz, onde T é o período de amostragem, estabelecendo um contato com o sinal de entrada durante um intervalo de tempo , e permanecendo em contato com o terra no restante do período T. Nas seções seguintes, o problema da amostragem por chaveamento será analisado em detalhes, antes porém, estuda-se o caso da amostragem ideal. 5.1.1 Amostragem ideal
A amostragem ideal refere-se ao processo de amostragem no qual a largura das amostras são nulas, e tem por objetivo simplicar a análise matemática do problema. Na Figura 5.2, ilustra-se um processo de amostragem ideal, onde cada amostra é representada por um ponto em negrito.
Sob certas condições, um determinado sinal é unicamente especificado por uma sequência de amostras equiespaçadas. Num caso mais geral, isso pode não ser verdade, pois podemos construir sinais distintos representados pela mesma sequência de amostra, como ilustrado pelos sinais em linha contínua e tracejada mostrados na Fig.5.2. Um dos objetivos deste capítulo, é estabelecer as condições para que essa ambiguidade não ocorra.
-2T -T 0 T 2T 3T 4T 5T ... t
Figura 5.2 - Dois sinais diferentes que possuem as mesmas amostras nos instantes t=nT. Se o intervalo de tempo das amostras na Fig.5.1, , for muito pequeno, pode-
se empregar uma aproximação de primeira ordem, conforme esquematizado na Fig.5.3, onde cada pulso tem amplitude constante e na qual o sinal amostrado é:
)nT(x)t(x)nT(xnTta
(5.1)
onde n=0, 1, 2, etc, especifica o índice da amostra dentro da sua sequência.

SINAIS E SISTEMAS
135
xa(t)
t
n0 1 2 3 4-1
T
Figura 5.3 - Aproximação em primeira ordem para o sinal amostrado. Cada amostra está associada ao
índice n=0, 1, 2, etc.
Por outro lado, vale lembrar que cada pulso estreito de largura pode ser escrito como um impulso no limite, e assim:
)nTt(nTt
rect1
lim)t(0
ou seja, na amostragem ideal, cada pulso de amostra pode ser considerada como um impulso unitário. O valor da amostra, que antes era a amplitude do pulso, agora deve ser substituída pela área do impulso.
Para estabelecer as condições de amostragem eficiente, consideremos a amostragem de um sinal x(t) por um trem de impulsos p(t): x t x t p ta ( ) ( ) ( ) (5.3) onde
n
T )nTt()]t([rep)t(p (5.4)
e T é o período de amostragem. Substituindo-se (5.4) em (5.3) obtém-se
nnn
a )nTt().nT(x)nTt().t(x)nTt().t(x)t(x (5.5)
A fim de observar os sinais x(t), p(t) e xa(t) no domínio do tempo, têm-se os gráficos mostrados na Fig.5.4.
Portanto, o sinal amostrado é um trem de impulsos cujas áreas são dadas pelos valores de x(t) nos instantes de amostragem, t=nT. Obviamente, qualquer impulso tem amplitude infinita, assim, a representação da Fig.5.4 d), na qual as amplitudes dos impulsos são moduladas por uma envoltória correspondente a x(t), é meramente esquemática e com objetivo pedagógico.
Vamos agora à análise desses sinais no domínio da frequência, utilizando-se da transformada de Fourier dos sinais.

AMOSTRAGEM DE SINAIS
136
x(t)
p(t)
xa(t)
t
x(t)
p(t)
t-2T -T 0 T 2T 3T
-2T -T 0 T 2T 3T4T
t
xa(t)
x(0) x(T)
x(-T) x(2T)
1
(a)
(b)
(c)
(d)
Figura 5.4 - Sinal amostrado no domínio do tempo.
Analisando os sinais no domínio da frequência, vamos assumir que o sinal x(t) tenha banda limitada a B Hz, e que as amostras estejam suficientemente próximas. Como no domínio do tempo tem-se a multiplicação entre x(t) e p(t), utilizando a propriedade da convolução para (5.3), no domínio da frequência tem-se: X f X f P fa ( ) ( ) ( ) (5.6) onde a transformada de Fourier do trem de impulsos (5.4) é: P f f f nfa a
n
( ) ( ) (5.7)
e
fTa 1
(5.8)
é a frequência de amostragem.
Portanto, substituindo-se (5.7) em (5.6), fica-se com: X f X f f f nf f X f nfa a a
na a
n
( ) ( ) * ( ) ( ) (5.9)
Graficamente têm-se os diagramas, mostrados na Fig.5.5, para X(f), P(f) e
Xa(f):

SINAIS E SISTEMAS
137
B-B
1
f
X(f)
fa fa fa
fa 2fa
fafa
-fa-2fa f
P(f)
fa
fa 2fa-fa-2fa f
Xa(f)=X(f)*P(f)
......
......
fa+Bfa-B-fa-B -fa+B B-B
(a)
(b)
(c)
Figura 5.5 - Sinais amostrados. Representação em frequência. a) Espectro do sinal x(t), b) Espectro do trem de impulsos. c) Espectro do sinal amostrado.
B-B
1
f
X(f)
fa
fa 2fa-fa-2fa f
Xa(f)
......
B-B
fa
fa 2fa-fa-2fa f
Xa(f)
......
B-B
fa
fa 2fa-fa-2fa f
Xa(f)
......
2fa
fa 2fa-fa-2fa f
Xa(f)
......
fa > 2B
fa = 2B
fa < 2B
fa = B
Figura 5.6 - Espectros de sinais amostrados com diferentes taxas de amostragem.

AMOSTRAGEM DE SINAIS
138
Nota-se que o espectro do sinal amostrado é composto por cópias do espectro de x(t), multiplicado por fa=1/T, e espaçadas de fa.
Observando o gráfico do espectro do sinal amostrado, Xa(f), nota-se que se
f B B ou f Ba a , 2 então o espectro do sinal x(t) pode ser recuperado passando-se o sinal amostrado por um filtro passa-baixas com ganho T e frequência de corte entre B e fa-B, conforme mostrado em linha tracejada na Fig.5.5. c).
Já se alguma dessas condições não for satisfeita, ou seja, se o sinal não tiver banda limitada ou se as amostras não estiverem suficientemente próximas, não se consegue mais recuperar o sinal original. Num sinal com banda limitada e variando-se a frequência de amostragem, podem ocorrer as situações mostradas na Fig.5.6, para fa>2B, fa=2B, fa<2B e fa=B.
Nota-se que, em situações onde fa2B, como na Figs. 5.6 d) e e), não é mais possível recuperar o espectro original devido à sobreposição causada pela subamostragem. Este é o efeito de "aliasing", onde frequências do espectro que deveriam ser elevadas acabam por aparecer em regiões de frequência mais baixa. Portanto, existe uma frequência de amostragem mínima a partir da qual o processo toma consistência. Isso dá origem ao consagrado teorema da amostragem, citado a seguir.
O Teorema da Amostragem é o seguinte:
Seja um sinal de banda limitada, com X(f)=0 para |f|>B. Então x(t) é unicamente determinado por suas amostras x(nT), n=0, 1, 2, 3, ... se
f B onde fTa a 21
O sinal x(t) pode ser recuperado passando-se o sinal amostrado por um filtro passa-baixas ideal com frequência de corte fc:
B f f Bc a A frequência fa é a frequência de amostragem ou frequência de Nyquist, enquanto que a frequência 2B é comumente chamada de taxa de Nyquist.
Os sinais utilizados na prática em geral são limitados no tempo e, portanto,
não são limitados em frequência, o que à primeira vista impossibilitaria a utilização do teorema acima. Quando um tal sinal é amostrado, ocorre uma inevitável sobreposição de espectro, como mostrado esquematicamente na Fig.5.7. Apesar de não estar explicitado na Fig.5.7 (por motivo exclusivamente didático), nas regiões onde ocorre sobreposição de espectro os gráficos deveriam ser somados. Na reconstrução, as frequências originalmente fora da banda de mensagem aparecerão na saída do filtro, afetando uma porção significativa de espectro do sinal.
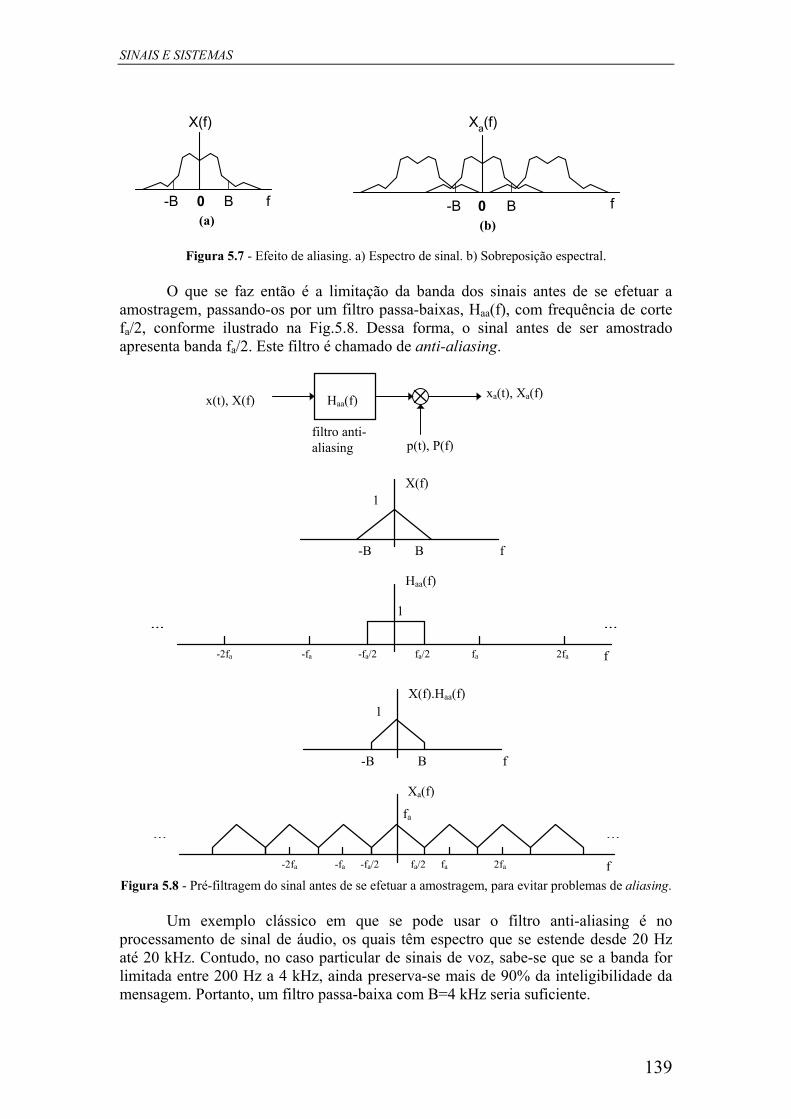
SINAIS E SISTEMAS
139
0
X(f)
fB-B (a)
0
Xa(f)
fB-B (b)
Figura 5.7 - Efeito de aliasing. a) Espectro de sinal. b) Sobreposição espectral.
O que se faz então é a limitação da banda dos sinais antes de se efetuar a
amostragem, passando-os por um filtro passa-baixas, Haa(f), com frequência de corte fa/2, conforme ilustrado na Fig.5.8. Dessa forma, o sinal antes de ser amostrado apresenta banda fa/2. Este filtro é chamado de anti-aliasing.
B-B
1
f
X(f)
1
fa 2fa-fa-2fa f
Haa(f)
......
fa/2-fa/2
B-B
1
f
X(f).Haa(f)
fa
fa 2fa-fa-2fa f
Xa(f)
......
fa/2-fa/2
Haa(f)x(t), X(f)xa(t), Xa(f)
p(t), P(f)filtro anti-aliasing
Figura 5.8 - Pré-filtragem do sinal antes de se efetuar a amostragem, para evitar problemas de aliasing.
Um exemplo clássico em que se pode usar o filtro anti-aliasing é no processamento de sinal de áudio, os quais têm espectro que se estende desde 20 Hz até 20 kHz. Contudo, no caso particular de sinais de voz, sabe-se que se a banda for limitada entre 200 Hz a 4 kHz, ainda preserva-se mais de 90% da inteligibilidade da mensagem. Portanto, um filtro passa-baixa com B=4 kHz seria suficiente.

AMOSTRAGEM DE SINAIS
140
Assim, se o conteúdo espectral do sinal, acima de uma certa frequência B, for reduzido ou sem importância, é aconselhável suprimi-lo. Mesmo numa situação genérica, afirma-se que a supressão da porção de espectro para f B causa menos dano ao sinal recuperado, do que se permitir que o aliasing ocorra [3].
Como na prática, contudo, não se pode implementar filtros ideais, deve-se estabelecer especificações para o filtro de modo a ter-se uma atenuação mínima em fa/2, por exemplo igual a 60 dB. Assim, o efeito do aliasing não é eliminado, mas bastante reduzido. 5.1.2 Efeito de subamostagem sobre sinais senoidais
Considere o sinal senoidal x t t( ) cos 2 0 , com frequência angular 0=2f0. Amostrando este sinal com uma frequência de amostragem fa, vamos observar o que acontece com o espectro do sinal amostrado e do sinal reconstruído, segundo os diagramas mostrados na Fig.5.9. Nota-se que, à medida que se reduz a frequência de amostragem, as imagens em |fa-f0| vão se aproximando-se dos impulsos em f0 . Quando fa<2f0, ocorre o efeito de aliasing, onde a linha que deveria representar uma frequência (fa-f0)>f0, está sendo vista como uma frequência menor que f0.
fa-fa f0-f0
f0-f0 f
f
fa
fa
-fa
-fa
fa-f0-(fa-f0) fa+f0-(fa+f0)
fa fa fafafafa
11
fa-fa
f
f
f
X(f)
Xa(f)
Xa(f)
Xa(f)
Xa(f)
fafa
fafa
2fa2fa
fa/2-fa/2
(a)fa=4f0
(b)fa=3f0
(c)fa=1,5f0
(d)fa=f0
Figura 5.9 - Espectro do sinal x(t); Espectro do sinal amostrado com diferentes frequências de
amostragem.
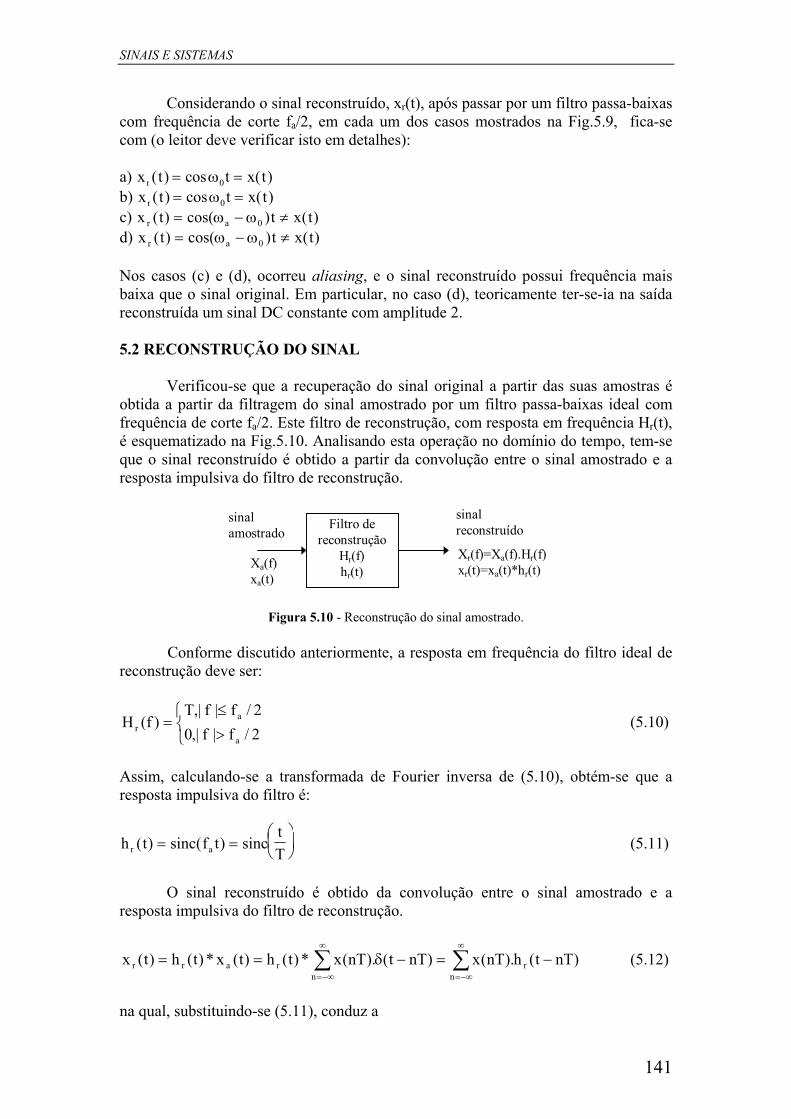
SINAIS E SISTEMAS
141
Considerando o sinal reconstruído, xr(t), após passar por um filtro passa-baixas com frequência de corte fa/2, em cada um dos casos mostrados na Fig.5.9, fica-se com (o leitor deve verificar isto em detalhes): a) x t t x tr ( ) cos ( ) 0 b) x t t x tr ( ) cos ( ) 0 c) x t t x tr a( ) cos( ) ( ) 0 d) x t t x tr a( ) cos( ) ( ) 0 Nos casos (c) e (d), ocorreu aliasing, e o sinal reconstruído possui frequência mais baixa que o sinal original. Em particular, no caso (d), teoricamente ter-se-ia na saída reconstruída um sinal DC constante com amplitude 2. 5.2 RECONSTRUÇÃO DO SINAL
Verificou-se que a recuperação do sinal original a partir das suas amostras é obtida a partir da filtragem do sinal amostrado por um filtro passa-baixas ideal com frequência de corte fa/2. Este filtro de reconstrução, com resposta em frequência Hr(t), é esquematizado na Fig.5.10. Analisando esta operação no domínio do tempo, tem-se que o sinal reconstruído é obtido a partir da convolução entre o sinal amostrado e a resposta impulsiva do filtro de reconstrução.
Filtro dereconstrução
Hr(f)hr(t)
Xa(f)xa(t)
Xr(f)=Xa(f).Hr(f)xr(t)=xa(t)*hr(t)
sinalamostrado
sinalreconstruído
Figura 5.10 - Reconstrução do sinal amostrado.
Conforme discutido anteriormente, a resposta em frequência do filtro ideal de reconstrução deve ser:
2/f|f|,0
2/f|f|,T)f(H
a
ar (5.10)
Assim, calculando-se a transformada de Fourier inversa de (5.10), obtém-se que a resposta impulsiva do filtro é:
h t sinc f t sinct
Tr a( ) ( )
(5.11)
O sinal reconstruído é obtido da convolução entre o sinal amostrado e a
resposta impulsiva do filtro de reconstrução.
n
rn
rarr )nTt(h).nT(x)nTt().nT(x*)t(h)t(x*)t(h)t(x (5.12)
na qual, substituindo-se (5.11), conduz a
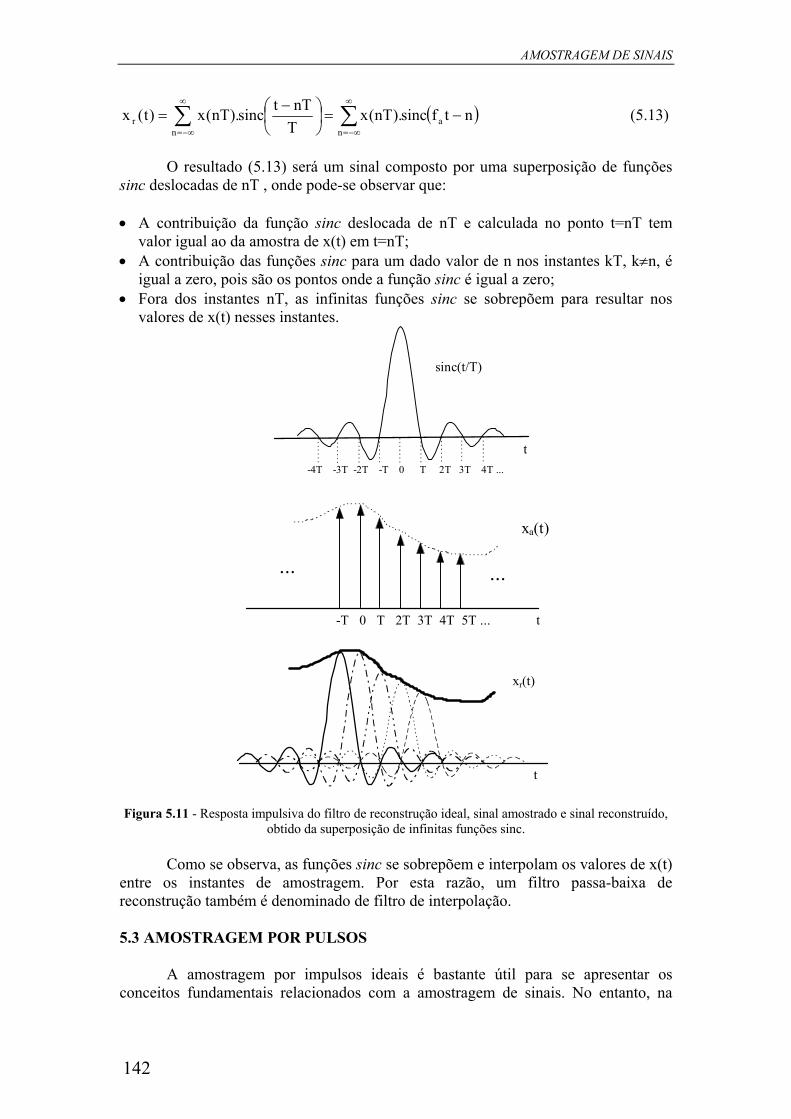
AMOSTRAGEM DE SINAIS
142
n
an
r ntfsinc).nT(xT
nTtsinc).nT(x)t(x (5.13)
O resultado (5.13) será um sinal composto por uma superposição de funções
sinc deslocadas de nT , onde pode-se observar que: A contribuição da função sinc deslocada de nT e calculada no ponto t=nT tem
valor igual ao da amostra de x(t) em t=nT; A contribuição das funções sinc para um dado valor de n nos instantes kT, kn, é
igual a zero, pois são os pontos onde a função sinc é igual a zero; Fora dos instantes nT, as infinitas funções sinc se sobrepõem para resultar nos
valores de x(t) nesses instantes.
......
-T 0 T 2T 3T 4T 5T ... t
xa(t)
xr(t)
t
-4T -3T -2T -T 0 T 2T 3T 4T ...
sinc(t/T)
t
Figura 5.11 - Resposta impulsiva do filtro de reconstrução ideal, sinal amostrado e sinal reconstruído, obtido da superposição de infinitas funções sinc.
Como se observa, as funções sinc se sobrepõem e interpolam os valores de x(t) entre os instantes de amostragem. Por esta razão, um filtro passa-baixa de reconstrução também é denominado de filtro de interpolação. 5.3 AMOSTRAGEM POR PULSOS
A amostragem por impulsos ideais é bastante útil para se apresentar os conceitos fundamentais relacionados com a amostragem de sinais. No entanto, na

SINAIS E SISTEMAS
143
prática não se consegue implementar circuitos que produzam impulsos, mas sim pulsos de duração finita.
Considere um sinal x(t) de banda limitada a B Hz (ou que tenha passado por um filtro anti-aliasing) e um trem de pulsos de amostragem com duração e período T=1/fa, como mostrado na Fig.5.12. O sinal amostrado xa(t) pode ser expresso matematicamente pela multiplicação dos dois sinais x(t) e p(t) na figura:
x(t)
p(t)
xa(t)
T
t
t
t
Figura 5.12 - Sinal x(t) de banda limitada, trem de pulsos de amostragem e sinal amostrado.
Note que o sinal amostrado é composto por pulsos cujas amplitudes acompanham a amplitude de x(t) durante segundos. Esta é a amostragem sem retenção. Analisando os sinais no domínio da frequência, tem-se: x t X f
p t P f f sinc f k f kf
x t x t p t X f X f P f f sinc f k X f kf
a a ak
a a a a ak
( ) ( )
( ) ( ) ( ). ( )
( ) ( ). ( ) ( ) ( ) ( ) ( ). ( )
(5.14)
onde os espectros X(f), P(f) e Xa(f) são mostrados na Fig.5.13.
B-B
1
f
X(f)
fa
fa 2fa-fa-2fa f
P(f)
fa 2fa-fa-2fa f
Xa(f)=X(f)*P(f)
......
......
fa+Bfa-B-fa-B -fa+B B-B
fa sinc( fa) fa sinc(2 fa)
fa
Figura 5.13 - Espectro do sinal amostrado com um trem de pulsos.
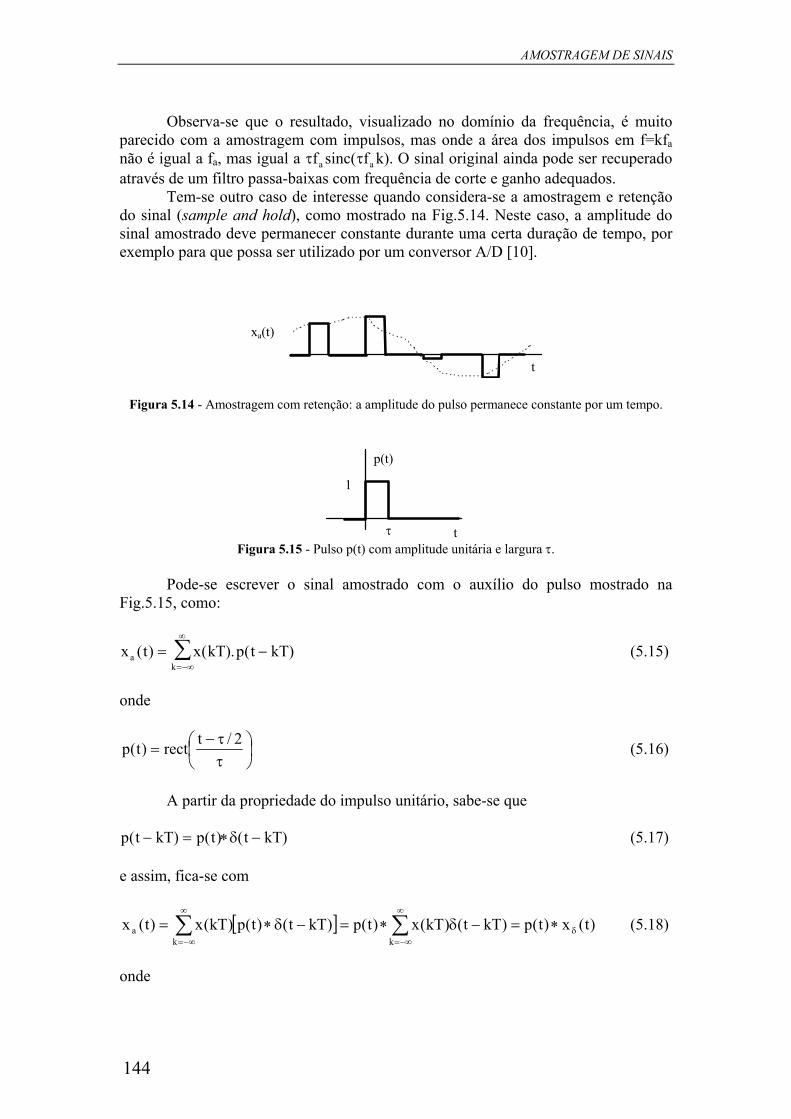
AMOSTRAGEM DE SINAIS
144
Observa-se que o resultado, visualizado no domínio da frequência, é muito
parecido com a amostragem com impulsos, mas onde a área dos impulsos em f=kfa não é igual a fa, mas igual a fa sinc(fa k). O sinal original ainda pode ser recuperado através de um filtro passa-baixas com frequência de corte e ganho adequados.
Tem-se outro caso de interesse quando considera-se a amostragem e retenção do sinal (sample and hold), como mostrado na Fig.5.14. Neste caso, a amplitude do sinal amostrado deve permanecer constante durante uma certa duração de tempo, por exemplo para que possa ser utilizado por um conversor A/D [10].
xa(t)
t
Figura 5.14 - Amostragem com retenção: a amplitude do pulso permanece constante por um tempo.
1
p(t)
t Figura 5.15 - Pulso p(t) com amplitude unitária e largura .
Pode-se escrever o sinal amostrado com o auxílio do pulso mostrado na
Fig.5.15, como:
x t x kT).p t kT)ak
( ) ( (
(5.15)
onde
2/t
rect)t(p (5.16)
A partir da propriedade do impulso unitário, sabe-se que
p t kT) p t t kT)( ( ) ( (5.17) e assim, fica-se com
)t(x)t(p)kTt()kT(x)t(p)kTt()t(p)kT(x)t(xkk
a
(5.18)
onde
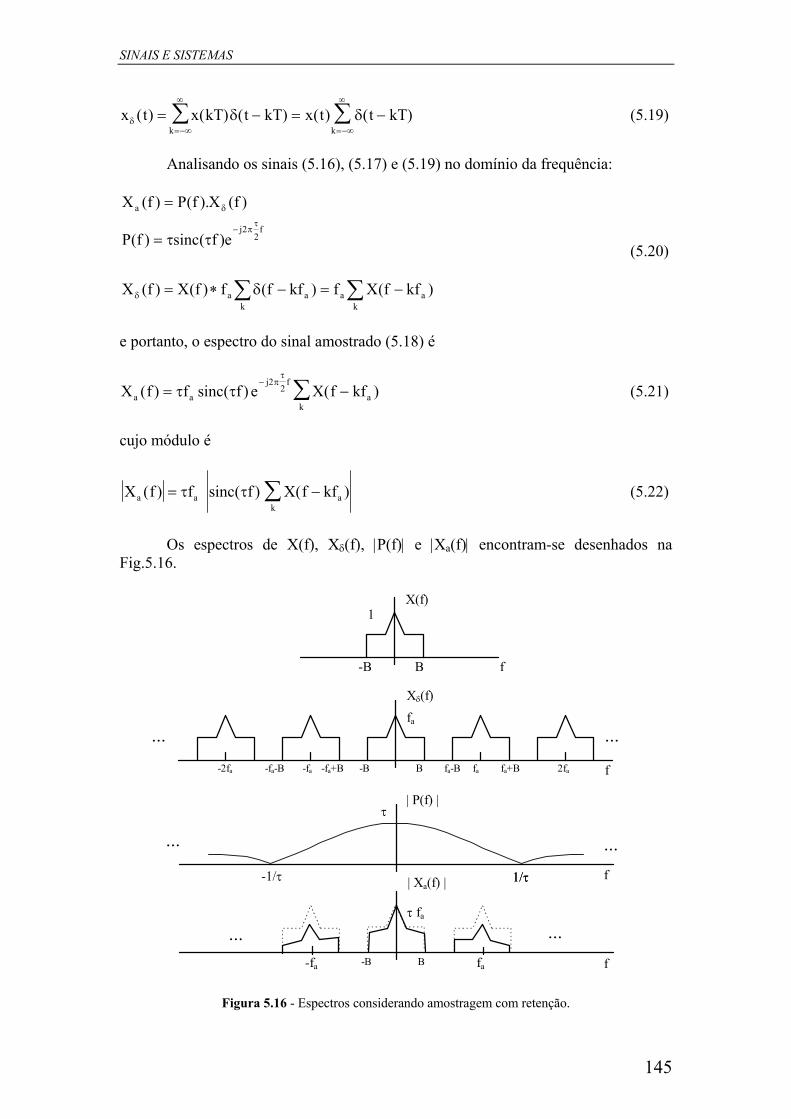
SINAIS E SISTEMAS
145
x t x kT) t kT) x t t kT)k k
( ) ( ( ( ) (
(5.19)
Analisando os sinais (5.16), (5.17) e (5.19) no domínio da frequência:
kaa
kaa
f2
2j
a
)kff(Xf)kff(f)f(X)f(X
e)f(sinc)f(P
)f(X).f(P)f(X
(5.20)
e portanto, o espectro do sinal amostrado (5.18) é
X f f sinc f e X f kfa a
j f
ak
( ) ( ) ( )
22 (5.21)
cujo módulo é
X f f sinc f X f kfa a ak
( ) ( ) ( ) (5.22)
Os espectros de X(f), X(f), P(f) e Xa(f) encontram-se desenhados na Fig.5.16.
B-B
1
f
X(f)
fa
fa 2fa-fa-2fa f
X(f)
......
fa+Bfa-B-fa-B -fa+B B-B
| P(f) |
1/1/-1/
f
f
| Xa(f) |
fa
...
......
...
B-B fa-fa
Figura 5.16 - Espectros considerando amostragem com retenção.
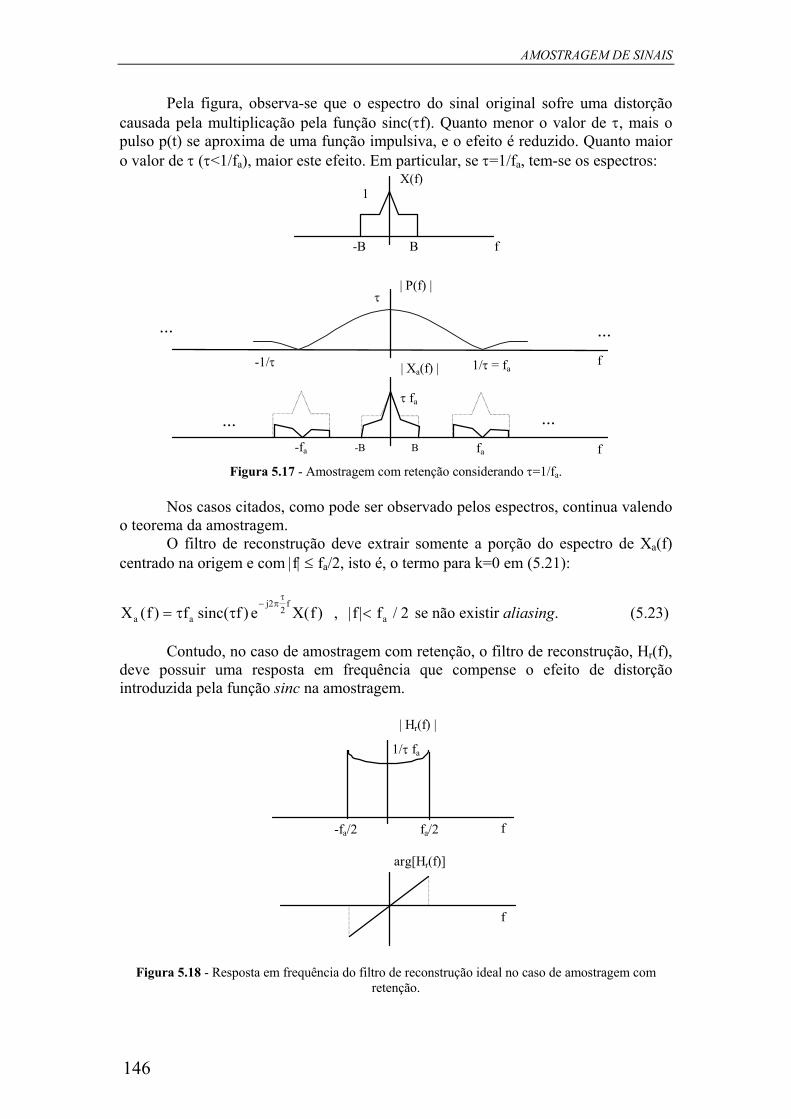
AMOSTRAGEM DE SINAIS
146
Pela figura, observa-se que o espectro do sinal original sofre uma distorção causada pela multiplicação pela função sinc(f). Quanto menor o valor de , mais o pulso p(t) se aproxima de uma função impulsiva, e o efeito é reduzido. Quanto maior o valor de (<1/fa), maior este efeito. Em particular, se =1/fa, tem-se os espectros:
B-B
1
f
X(f)
| P(f) |
1/ = fa-1/
f
f
| Xa(f) |
fa
...
......
...
B-B fa-fa
Figura 5.17 - Amostragem com retenção considerando =1/fa.
Nos casos citados, como pode ser observado pelos espectros, continua valendo o teorema da amostragem.
O filtro de reconstrução deve extrair somente a porção do espectro de Xa(f) centrado na origem e com f fa/2, isto é, o termo para k=0 em (5.21):
X f f sinc f e X f f fa a
j f
a( ) ( ) ( ) , | | /
22 2 se não existir aliasing. (5.23)
Contudo, no caso de amostragem com retenção, o filtro de reconstrução, Hr(f),
deve possuir uma resposta em frequência que compense o efeito de distorção introduzida pela função sinc na amostragem.
| Hr(f) |
arg[Hr(f)]
fa/2-fa/2 f
f
1/ fa
Figura 5.18 - Resposta em frequência do filtro de reconstrução ideal no caso de amostragem com retenção.

SINAIS E SISTEMAS
147
O sinal reconstruído deve ser obtido por: X f X f H f X fr a r( ) ( ). ( ) ( ) e portanto
H fe
f sinc ff fr
j f
aa( )
( ), | | /
22
2
(5.24)
cujas características de módulo e fase encontram-se mostradas na Fig.5.18. 5.4 EXERCÍCIOS 5.4.1. A amostragem corresponde ao processo de representação de um sinal contínuo no tempo por meio de amostras (sinal de tempo discreto), e é muito utilizada no processamento digital de sinais como, por exemplo, no armazenamento, transmissão e tratamento digital de voz e imagem, sistemas digitais de controle, sensoriamento remoto e outros. Dado um sinal analógico x(t), o sinal de tempo discreto é obtido fazendo-se
)]t([rep).t(x)t(v To ,
onde repTo[(t)] é um trem de impulsos com período T0. Para uma função genérica w(t), estritamente limitada no tempo, define-se um trem de funções w(t) com período T0, pela relação:
n
0To )nTt(w)]t(w[rep .
Mostrar que a Transformada de Fourier do sinal amostrado v(t) é
)]f(X[repT
1)f(V
To
10
,
onde X(f) é o espectro de x(t). 5.4.2. Há várias maneiras de se estimar a banda essencial de sinais de banda ilimitada. Para um sinal passa-baixas, por exemplo, a banda essencial pode ser escolhida a partir da freqüência onde a amplitude do espectro atinge K% do seu valor de pico (normalmente em f=0), onde a escolha de K depende da aplicação. Para K=5, determine a banda essencial dos sinais: a) g t e u ta t( ) ( ); a>0 b) g t e a t( ) ; a>0 Qual a mínima freqüência de amostragem que poderia ser utilizada nos casos acima?
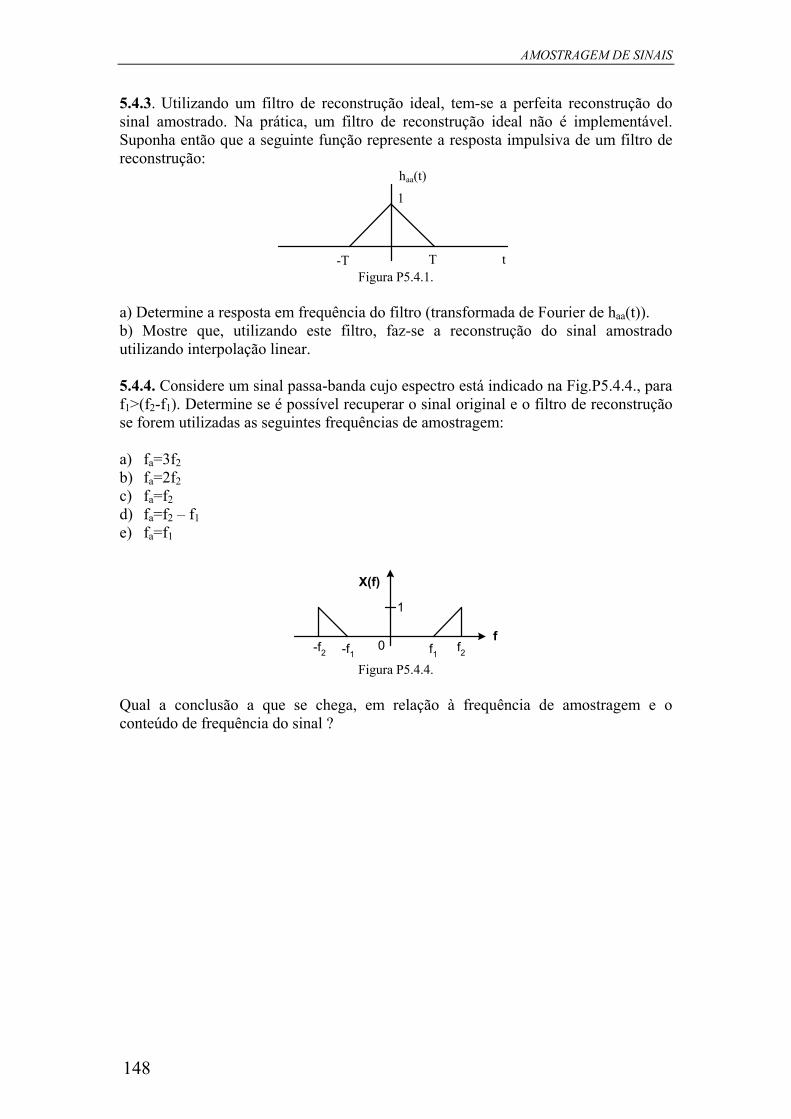
AMOSTRAGEM DE SINAIS
148
5.4.3. Utilizando um filtro de reconstrução ideal, tem-se a perfeita reconstrução do sinal amostrado. Na prática, um filtro de reconstrução ideal não é implementável. Suponha então que a seguinte função represente a resposta impulsiva de um filtro de reconstrução:
-T T
1
t
haa(t)
Figura P5.4.1.
a) Determine a resposta em frequência do filtro (transformada de Fourier de haa(t)). b) Mostre que, utilizando este filtro, faz-se a reconstrução do sinal amostrado utilizando interpolação linear. 5.4.4. Considere um sinal passa-banda cujo espectro está indicado na Fig.P5.4.4., para f1>(f2-f1). Determine se é possível recuperar o sinal original e o filtro de reconstrução se forem utilizadas as seguintes frequências de amostragem: a) fa=3f2 b) fa=2f2 c) fa=f2 d) fa=f2 – f1 e) fa=f1
f1 f2f
X(f)
1
0-f1-f2
Figura P5.4.4.
Qual a conclusão a que se chega, em relação à frequência de amostragem e o conteúdo de frequência do sinal ?
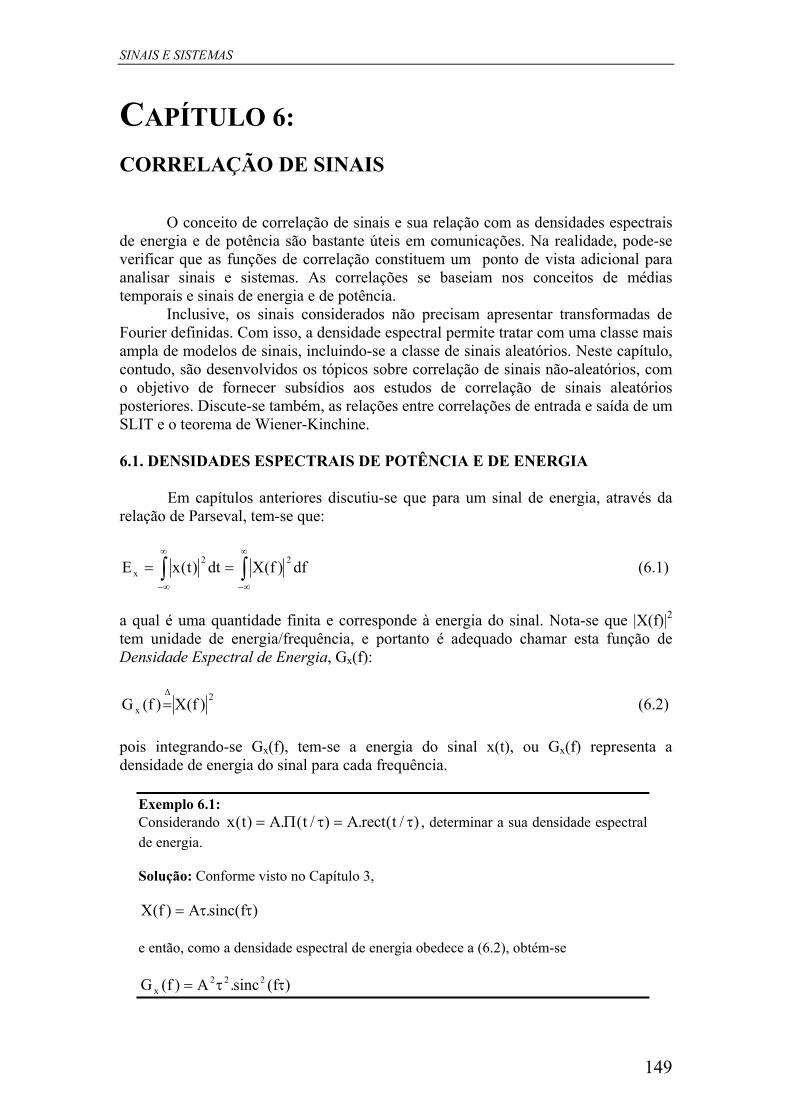
SINAIS E SISTEMAS
149
CAPÍTULO 6:
CORRELAÇÃO DE SINAIS
O conceito de correlação de sinais e sua relação com as densidades espectrais de energia e de potência são bastante úteis em comunicações. Na realidade, pode-se verificar que as funções de correlação constituem um ponto de vista adicional para analisar sinais e sistemas. As correlações se baseiam nos conceitos de médias temporais e sinais de energia e de potência.
Inclusive, os sinais considerados não precisam apresentar transformadas de Fourier definidas. Com isso, a densidade espectral permite tratar com uma classe mais ampla de modelos de sinais, incluindo-se a classe de sinais aleatórios. Neste capítulo, contudo, são desenvolvidos os tópicos sobre correlação de sinais não-aleatórios, com o objetivo de fornecer subsídios aos estudos de correlação de sinais aleatórios posteriores. Discute-se também, as relações entre correlações de entrada e saída de um SLIT e o teorema de Wiener-Kinchine. 6.1. DENSIDADES ESPECTRAIS DE POTÊNCIA E DE ENERGIA
Em capítulos anteriores discutiu-se que para um sinal de energia, através da relação de Parseval, tem-se que:
df)f(Xdt)t(xE22
x (6.1)
a qual é uma quantidade finita e corresponde à energia do sinal. Nota-se que |X(f)|2 tem unidade de energia/frequência, e portanto é adequado chamar esta função de Densidade Espectral de Energia, Gx(f):
2
x )f(X)f(G
(6.2)
pois integrando-se Gx(f), tem-se a energia do sinal x(t), ou Gx(f) representa a densidade de energia do sinal para cada frequência.
Exemplo 6.1: Considerando )/t(rect.A)/t(.A)t(x , determinar a sua densidade espectral de energia. Solução: Conforme visto no Capítulo 3,
)f(sinc.A)f(X e então, como a densidade espectral de energia obedece a (6.2), obtém-se
)f(sinc.A)f(G 222x

CORRELAÇÃO DE SINAIS
150
Para um sinal de potência, é razoável falar em termos de Densidade Espectral de Potência, Sx(f), que representa a distribuição de potência em função da frequência. Assim, se
2/T
2/T
*
Txx dt)t(x)t(x
T
1limdf)f(SP (6.3)
for finito, Px corresponderá à potência do sinal. Entretanto, ao contrário da densidade espectral de energia, Gx, cujo cálculo já encontra-se bem estabelecido através de (6.2), a determinação da densidade espectral de potência, Sx, ainda precisa ser mais detalhadamente discutida.
Neste ponto do texto, vamos alertar que, para fins de simplificar a notação, usaremos a mesma representação Gx(f), tanto para a densidade espectral de energia quanto para a de potência, a menos que se diga o contrário.
Nas seções seguintes são definidas as funções de correlação cruzada e de autocorrelação. Como existe uma distinção entre sinais de potência e de energia, estuda-se um caso de cada vez.
6.2. CORRELAÇÃO DE SINAIS DE POTÊNCIA
Antes de prosseguir, é conveniente discutir alguns tópicos preliminares como a definição de valor médio no tempo e de produto escalar de funções. O leitor poderá perceber, que trata-se da generalização dos conceitos vistos no Capítulo 2.
6.2.1. Valor médio temporal O valor médio de um sinal de potência é calculado através da seguinte integral:
2/T
2/TTdt).t(x
T
1lim)t(x (6.4)
Sendo x(t), x1(t) e x2(t) sinais de potência, pode-se verificar que a operação de
valor médio temporal possui as seguintes propriedades
a) ** )t(x)t(x (6.5a)
b) )t(x)tt(x d (6.5b)
c) )t(xa)t(xa)t(xa)t(xa 22112211 (6.5c)
6.2.2. Produto escalar Se v(t) e w(t) são sinais de potência, define-se o produto escalar de v(t) e w(t) pela integral de valor médio:
2/T
2/T
*
T
* dt).t(w).t(vT
1lim)t(w).t(v (6.6)

SINAIS E SISTEMAS
151
a qual fornece uma indicativa sobre o grau de similaridade entre v(t) e w(t), conforme já foi detalhadamente discutido no Capítulo 2. Recorrendo-se à desigualdade de Schwarz, da física matemática, verifica-se que o produto escalar obedece a [2]-[4]:
wv
2* PP)t(w).t(v (6.7)
onde a condição de igualdade nesta relação ocorre quando v(t) e w(t) são proporcionais, ou seja, v(t) = K.w(t), onde K é constante. Isto informa que o produto escalar é máximo quando os sinais são proporcionais ou similares, o que concorda com resultados de capítulos anteriores. Em termos de produto escalar, a potência do sinal de potência (6.3) pode ser rescrita como:
2*2/T
2/T
*
Txx )t(x)t(x)t(xdt)t(x)t(x
T
1limdf)f(GP
(6.8)
6.2.3. Função de Correlação cruzada A correlação cruzada dos sinais v(t) e w(t) é definida através do seguinte produto escalar:
)t(w).t(v)t(w).t(v)(R **vw (6.9)
resultando numa função de , uma vez que a variável muda t desaparece da análise após o cálculo da integral de média temporal. Ao contrário do produto escalar simples, a correlação cruzada tem um grau a mais de utilidade, pois informa sobre similaridades (ou diferenças) entre os sinais v(t) e w(t-), sendo este último deslocado continuamente no tempo. A seguir, são apresentadas algumas propriedades importantes da correlação cruzada:
a) wv
2
vw PP)(R (6.10a)
b) )(R)(R *vwwv (6.10b)
Em particular, o resultado em b) informa que as funções Rvw e Rwv não são iguais. 6.2.4. Função de autocorrelação A função de autocorrelação do sinal v(t) ou w(t) é definida como um caso particular da correlação cruzada, quando v(t)=w(t), isto é
)t(v).t(v)t(v).t(v)(R)(R **vvv (6.11)

CORRELAÇÃO DE SINAIS
152
e informa sobre a variação temporal de v(t), pelo menos em termos de média temporal. Assim, se )(R v é elevado, pode-se inferir que v(t-) é bastante similar a
v(t), para um dado valor de . Algumas propriedades importantes da autocorrelação são: a) vv P)0(R (6.12a)
b) )0(R)(R vv (6.12b)
c) )(R)(R *vv (6.12c)
d) Se v(t) é real, então Rv() é real e par (6.12d) e) Se v(t) é periódica, então Rv() é periódica. (6.12e) A propriedade a) informa que o valor da autocorrelação na origem corresponde à potência do sinal. A propriedade b) implica em que a função de autocorrelação apresenta seu valor máximo na origem. A propriedade c) informa que a autocorrelação exibe simetria Hermitiana. Uma propriedade adicional, e que também tem grande importância, refere-se à autocorrelação da superposição de duas funções. Assim, se z(t) for
)t(w)t(v)t(z (6.13) então, sua autocorrelação obedece a
)](R)(R[)(R)(R)(R wvvwwvz (6.14)
cuja demonstração deixa-se a cargo do leitor [3]. No caso em que v(t) e w(t) são descorrelacionados para todo , ou seja, quando Rvw()=Rwv()=0, a propriedade (6.14) conduz a
)(R)(R)(R wvz (6.15)
Neste caso, fazendo =0 e usando (6.12 a), obtém-se
wvz PPP (6.16)
Isto permite concluir que numa superposição de sinais v(t) e w(t), a superposição de potências só ocorre para sinais descorrelacionados.
Exemplo 6.2:
Considere-se os sinais tjv
veC)t(v e tjw
weC)t( , onde Cv e Cw são constantes
complexas. Calcular a correlação cruzada de v(t) e w(t) e a autocorrelação de v(t). Solução: Aplicando-se (6.9), calcula-se
tjtjj*wv
*)t(jw
tjvvw
wvwwv e.eeCC]eC].[eC[)(R

SINAIS E SISTEMAS
153
Antes de prosseguir, vamos avaliar a seguinte relação de ortogonalidade entre fasores:
2
T)(sinclimdt.e
T
1lime.e wv
T
2/T
2/T
t)(j
T
tjtj wvwv
a partir da qual se conclui que
vw
vwtjtj
se,1
se,0e.e wv
Substituindo-se essa informação na expressão para Rvw() acima, conclui-se que
vw
j*wv
vwvw se,eCC
se,0)(R
v
Isto evidencia que os fasores são descorrelacionados, a menos que tenham
mesma frequência. A função de autocorrelação de v(t) pode ser deduzida desta última:
vvv j2
v*)t(j
vtj
vv eC]eC].[eC[)(R
Exemplo 6.3: Calcular a função autocorrelação do sinal co-senoidal: )tcos(.A)t(z 0 .
Solução: Vamos rescrever z(t) na forma de somas de funções exponenciais complexas
)t(w)t(vee2
Aee
2
A)t(z tjjtjj 00
Então, podemos aplicar os resultados do exemplo 6.2 para avaliar a autocorrelação de z(t). Como vw, as correlações cruzadas Rvw()=Rwv()=0. Assim, aplicando-se os resultados obtidos para autocorrelação de exponenciais complexas (fasores):
tjjj2
tjjj2
wvvwwvz00 eee
4
Aeee
4
A)(R)(R)(R)(R)(R
0
2
z cos2
A)(R
que constitui uma função real, par e periódica. A potência contida em z(t) é
2/A)0(RP 2zz , como já era esperado.
6.3. CORRELAÇÃO ENTRE SINAIS DE ENERGIA No caso de sinais de energia, o valor médio do sinal como definido em (6.4) resulta nulo, e a definição de produto escalar deve ser alterada. Assim, define-se o produto escalar entre os sinais de energia v(t) e w(t) como

CORRELAÇÃO DE SINAIS
154
dt).t(w).t(v)t(w).t(v ** (6.17)
Isto posto, definem-se as funções de correlação cruzada e de autocorrelação entre os sinais de energia, v(t) e w(t), de forma similar ao caso de sinais de potência:
dt).t(w).t(v)t(w).t(v)(R **
vw (6.18a)
dt).t(v).t(v)t(v).t(v)(R)(R **
vvv (6.18b)
Como a operação de integração
dt).t(v apresenta as mesmas propriedades
matemáticas da operação de média temporal em (6.5), todas as propriedades deduzidas para a correlação de sinais de potência se mantêm, bastando substituir a potência Pv pela energia Ev.
a) wv
2
vw EE)(R (6.19a)
b) )(R)(R *vwwv (6.19b)
c) vv E)0(R (6.19c)
d) )0(R)(R vv (6.19d)
e) )(R)(R *vv (6.19e)
f) Se v(t) é real, então Rv() é real e par (6.19f) c) )](R)(R[)(R)(R)(R wvvwwvz (6.19g)
Em particular, o caso da propriedade (6.19c), permite concluir que a área sob a
curva de Gv(f), a qual sabe-se que corresponde à energia Ev, também corresponde a Rv(0).
Algumas propriedades exclusivas podem ser citadas para os sinais de energia, comparando-se a função de correlação com a operação de convolução. Partindo-se de (6.18 a), e fazendo-se as trocas: z(t)=w*(-t) e t=, resulta
)(z*)(vd).(z).(v)(R vw
(6.20)
já que a integral acima corresponde à convolução entre v(t) e z(t). Portanto, apresentam-se as seguintes propriedades adicionais, válidas para sinais de energia:
)(w*)(v)(R *vw (6.21a)
)(v*)(v)(R *v (6.21b)
Além disso, recorrendo-se ao teorema de Parseval, mostra-se também:
df.)f(W).f(Vdt.)t(w).t(v)0(R **vw
(6.22a)
df.)f(Vdt.)t(vE)0(R22
vv
(6.22b)

SINAIS E SISTEMAS
155
Inserindo-se as informações Ev=Rv(0) e Ew=Rw(0) em (6.19 a), pode-se obter versão do teorema de Schwarz no domínio da frequência:
df)f(W.df)f(Vdf.)f(W).f(V
222
* (6.23)
A condição de igualdade na relação acima só ocorre quando V(f) e W(f) forem proporcionais. Este teorema é muito útil no estudo de filtros casados em comunicações digitais. 6.4. CORRELAÇÃO ENTRE ENTRADA E SAÍDA EM SLIT
Os resultados que serão apresentados nesta seção serão válidos tanto para sinais de energia quanto de potência. Porém, pela facilidade de notação, algumas demonstrações serão executadas apenas para o caso de sinais de energia.
Seja um sistema linear, invariante no tempo (SLIT) e estável, com entrada x(t), saída y(t) e resposta impulsiva h(t), como aquele ilustrado na Fig.6.1.
h(t)H(f)
x(t)X(f)
y(t)=x(t)*h(t)Y(f)=X(f) H(f)
Figura 6.1 - Relações entre entrada e saída de um SLIT.
Empregando-se resultados do Capítulo 4, sobre análise de SLITs, calcula-se a densidade espectral de energia/potência associada ao sinal de saída
2
x
2222
y )f(H)f(G)f(H)f(X)f(H)f(X)f(Y)f(G (6.24)
ou seja, a energia/potência do sinal de saída depende da energia do sinal de entrada e da resposta em frequência do sistema.
Portanto as relações de energia e potência num SLIT podem ser representadas como na Fig.6.2:
H(f)X(f)
Gx(f)
Y(f)=X(f).H(f)
Gy(f)=Gx(f).|H(f)|2
Figura 6.2 - Relações de energia e potência entre entrada e saída em frequência de um SLIT. Aplicando-se a propriedade descrita em (6.19c) para o sinal y(t), e contando
com o auxílio de (6.24) obtém-se que
df).f(G.)f(Hdf).f(G)0(R x
2
yy (6.25)
Nos itens a seguir, procede-se à análise temporal das correlações de entrada e
saída do SLIT, conforme esquematizado na Fig.6.3. Vamos assumir que x(t) e y(t) são sinais de energia, tal que possamos usar a notação compacta de produto escalar (6.17).

CORRELAÇÃO DE SINAIS
156
A condição de sistema estável assegura que y(t) será do mesmo tipo que x(t), ou seja, outro sinal de energia. Conforme já foi observado, os resultados obtidos também poderão ser aplicados para sinais de potência.
h(t)H(f)
x(t)Rx()
y(t) Ry()
Figura 6.3 - Relação entre autocorrelação de entrada e saída do SLIT.
Vamos, então, proceder ao cálculo da correlação cruzada de x(t) e y(t):
)t(x)].t(x*)t(h[)t(x).t(y)(R **yx (6.26)
Substituindo-se a integral de convolução em (6.26) obtém-se
d.)t(x).t(x).(h)t(x.d).t(x).(h)(R **
yx (6.27)
Como )t(v)t(v para qualquer o produto escalar em (6.27) torna-se
)(R)](t[x).t(x)t(x).t(x)t(x).t(x x***
(6.28) e portanto
d.)(R).(h)(R xyx (6.29)
a qual corresponde a uma integral de convolução na variável , isto é
)(R*)(h)(R xyx (6.30)
Ressalta-se que uma convolução no domínio- é executada de forma similar
àquelas para o domínio-t, bem como, goza de todas as propriedades dessas últimas. Procedendo de forma semelhante, mostra-se que
d.)t(x).t(y)(h)t(y).t(y)(R ***
y (6.31)
donde deduz-se também que
)(R)t(x).t(y yx* (6.32)
Efetuando-se a mudança de variável: , obtém-se que (6.31) e (6.32)
conduzem a

SINAIS E SISTEMAS
157
d).(R).(h)(R yx
*y (6.33)
ou seja
)(R*)(h)(R yx
*y (6.34)
Portanto, substituindo-se (6.30) em (6.34), tem-se
)(R*)(h*)(h)(R x*
y (6.35)
que estabelece a relação entre as autocorrelações de entrada e saída. Na próxima seção, investiga-se um teorema de extrema importância na análise de sinais, em particular, no estudo de ruído, denominado de teorema de Wiener-Kinchine. 6.5 O TEOREMA DE WIENER-KINCHINE O teorema de Wiener-Kinchine estabelece uma importante relação entre a densidade espectral de energia/potência e a função de autocorrelação. Objetivamente, o teorema estabelece que:
de).(R)](R[)f(G f2jvvv (6.36a)
e
dfe).f(G)]f(G[)(R f2j
vv1
v (6.36b)
onde ].[ atua como a transformada de Fourier aplicada a funções no domínio-. Ou
seja, o teorema estabelece mais um par de transformada de Fourier:
)f(G)(R vv (6.37)
A demonstração do teorema pode ser realizada rapidamente, para sinais de energia. Assim, vamos avaliar a transformada de Fourier inversa:
)f(V)f(V)f(V)f(V)f(G *11*1v
1 (6.38)
onde se empregou (6.2) e o teorema da convolução. A partir das propriedades da transformada de Fourier, (6.38) se converte em
)(Rd)(v)(v)(v)(v)}f(G{ vv1
(6.39)
onde a integral de convolução também corresponde à definição de autocorrelação, o que conclui a demonstração.

CORRELAÇÃO DE SINAIS
158
Exemplo 6.4: Aplicar o teorema de Wiener-Kinchine para obter o espectro de potência de
)tcos(.A)t(z 0 .
Solução: Conforme foi visto no exemplo 6.2, 0
2
z cos2
A)(R , e assim
)ff(2
A)ff(
2
Acos
2
A)f(G 0
2
0
2
0
2
v
cujo gráfico encontra-se desenhado na Fig.6.4. Este resultado obviamente já era esperado.
A2/4A2/4
Gz(f)
f0 f0-f0
Figura 6.4 - Espectro de potência do sinal z(t).
6.6. EXERCÍCIOS 6.6.1. Prove (6.10 b). 6.6.2 Demonstrar a equação (6.14) do texto. Sugestão: Ver o livro do Carlson [3]. 6.6.3. Use (6.2) para calcular a densidade espectral, a autocorrelação e a energia de sinal quando )]tt.(W2[sinc.A)t(x d
6.6.4. Considere o filtro “comb” (pente) mostrado na Fig. P6.6.4. Pede-se determinar a) Sua resposta impulsiva h(t) b) Sua resposta em frequência H(f)
c) Esboçar o gráfico de 2
)f(H
d) A expressão da autocorrelação de saída em função da autocorrelação de entrada Rx() usando (6.35)
e) A expressão da energia/potência de saída.
+
atraso
+
-
x(t) y(t)
Figura P6.6.4.

SINAIS E SISTEMAS
159
6.6.5. Se )t(gA)t(x , onde a média temporal de g(t) é zero, ou seja,
2/T
2/TT0dt).t(g
T
1lim)t(g , então:
a) O sinal x(t) é um sinal de energia ou de potência? b) Calcule a função de autocorrelação )(R x ;
c) Calcule a densidade espectral de energia/potência de )f(G x ; d) A energia/potência de x(t). 6.6.6. Obter a densidade espectral, a autocorrelação e a potência de sinal quando
)t2cos(A)tcos(A)t(x 202101 .
6.6.7. Um sinal binário aleatório x(t) é mostrado na Fig. P6.6.7. Um bit 1 é transmitido por um pulso p(t), que tem amplitude A e largura T0/2, e, um bit 0 é transmitido na ausência de pulso. Os bits 1’s e 0’s ocorrem aleatoriamente, e a ocorrência de 1 e 0 é igualmente provável. Determinar Rx() e a densidade espectral de potência Gx(f) se um dígito binário é transmitido a cada T0 segundos.
1 11 1 1 10 00
t
0
T0 T0/2
Figura P6.6.7. 6.6.8. Obter o valor quadrático médio da tensão de saída y(t) da rede RC mostrada na Fig.P6.6.8. se a tensão de entrada tem uma densidade espectral de potência Gx(f) dada por: a) Gx(f)=K; b) Gx(f)=rect(f/) c) Gx(f)=[ff]] Em cada caso, identifique a natureza do sinal de entrada e calcule a potência (valor quadrático médio) do sinal de entrada.
2
2 1 Fx(t) y(t)
Figura P6.6.8.

CORRELAÇÃO DE SINAIS
160
SINAIS E SISTEMAS
161
Bibliografia: [1] Schwartz, M. & Shaw, L., Signal Processing: Discrete Spectral Analysis,
Detection, and Estimation, McGraw-Hill, 1975.
[2] Oppenheim, A.V. , Willsky, A.S. and Young, I.T., Signals and Systems, Prentice- Hall Signal Processing Series, 1983.
[3] Carlson, A.B., Communication Systems – An Introduction to Signal and Noise in Electrical Communication, Third edition, McGraw-Hill, 1986.
[4] Lathi, B.P., Sistemas de Comunicação, Editora Guanabara, 1979
[5] Close, C.M., Circuitos Lineares, vol.1, Ed da Universidade de São Paulo e Livros Técnicos e Científicos Ed. S.A., 1975.
[6] Roden, M.S., Analog and Digital Communication Systems, Fourth edition, Prentice Hall, 1996.
[7] Spiegel, M.R., Análise de Fourier, McGraw-Hill, 1976.
[8] Glisson, T.H., Introduction to System Analysis, McGraw-Hill, 1985.
[9] Papoulis, A., Signal Analysis, McGraw-Hill International Editions, 1984.
[10] Oppenheim, A.V. & Schafer, R.W., Discrete-Time Signal Processing, Second Edition, Prentice Hall, USA, 1999.
![Transformada Discreta de Fourier. Análise espectral no ... · Transformada Discreta de Fourier - DFT onde e (3) Sendo conhecido o sinal [𝑛], os coeficientes de Fourier podem ser](https://static.fdocumentos.tips/doc/165x107/60c6af669080ba62d8513fce/transformada-discreta-de-fourier-anlise-espectral-no-transformada-discreta.jpg)