EXTRAÇÃO SEMI - AUTOMÁTICA DE FEIÇÕES LINEARES E A ... · usp – universidade de sÃo paulo...
20
USP – UNIVERSIDADE DE SÃO PAULO EP – ESCOLA POLITÉCNICA LEONARDO ERCOLIN FILHO AGOSTO/2006 EXTRAÇÃO SEMI - AUTOMÁTICA DE FEIÇÕES LINEARES E A CALIBRAÇÃO DOS PARÂMETROS INTRÍNSECOS DE CÂMERAS Projeto de Pesquisa PIBIC/CNPq (2000 - 2001)
Transcript of EXTRAÇÃO SEMI - AUTOMÁTICA DE FEIÇÕES LINEARES E A ... · usp – universidade de sÃo paulo...

USP – UNIVERSIDADE DE SÃO PAULOEP – ESCOLA POLITÉCNICA
LEONARDO ERCOLIN FILHO
AGOSTO/2006
EXTRAÇÃO SEMI - AUTOMÁTICA DE FEIÇÕES LINEARES E A
CALIBRAÇÃO DOS PARÂMETROS INTRÍNSECOS DE CÂMERAS
Projeto de Pesquisa PIBIC/CNPq (2000 - 2001)
TÓPICOS DA APRESENTAÇÃO
� DEFINIÇÕES PRELIMINARES� APLICAÇÕES E TÉCNICAS� ETAPAS DO PROJETO� ETAPA I – EXTRAÇÃO DE FEIÇÕES� ETAPA II – CALIBRAÇÃO� RESULTADOS OBTIDOS� CONCLUSÕES

� CALIBRAÇÃO: Procedimento utilizado para obtenção dos parâmetros intrínsecos de câmeras, sejam elas analógicas, digitais ou de vídeo.
� PARÂMETROS INTRÍNSECOS: coeficientes de distorção do sistema ótico da câmera que são:
� Deslocamento do Ponto Principal: (X0, Y0): Provocado pela não coincidência do eixo ótico de lentes com o centro da fotografia.
� Distorção Radial Simétrica (K1, K2, K3): Provocada devido à geometria da lente.
� Distorção Descentrada (P1, P2): Provocada pelo não alinhamento do eixo ótico das lentes.
DEFINIÇÕES PRELIMINARES

APLICAÇÕES E TÉCNICAS
� APLICAÇÕES: Este procedimento é necessário principalmente quando se pretende utilizar imagens em aplicações de natureza métrica, como por exemplo, em mapeamento utilizando Fotogrametria.
� TÉCNICAS: Nos métodos de calibração existentes, as medidas são efetuadas em:
� Alvos Pontuais.� Feições lineares extraídas em imagens digitais (*).
� HIPÓTESE (*): Na ausência de distorção ótica, as feições lineares são projetadas como segmentos de reta no plano imagem.
ETAPAS DO PROJETO
� ETAPA I: Desenvolvimento de um algoritmo para extração de feições lineares (retas) de modo semi-automático.
� ETAPA II: Desenvolvimento de um algoritmo de calibração com modelo matemático baseado no método de feições lineares para obtenção dos parâmetros intrínsecos.
ETAPA I – EXTRAÇÃO DE FEIÇÕES
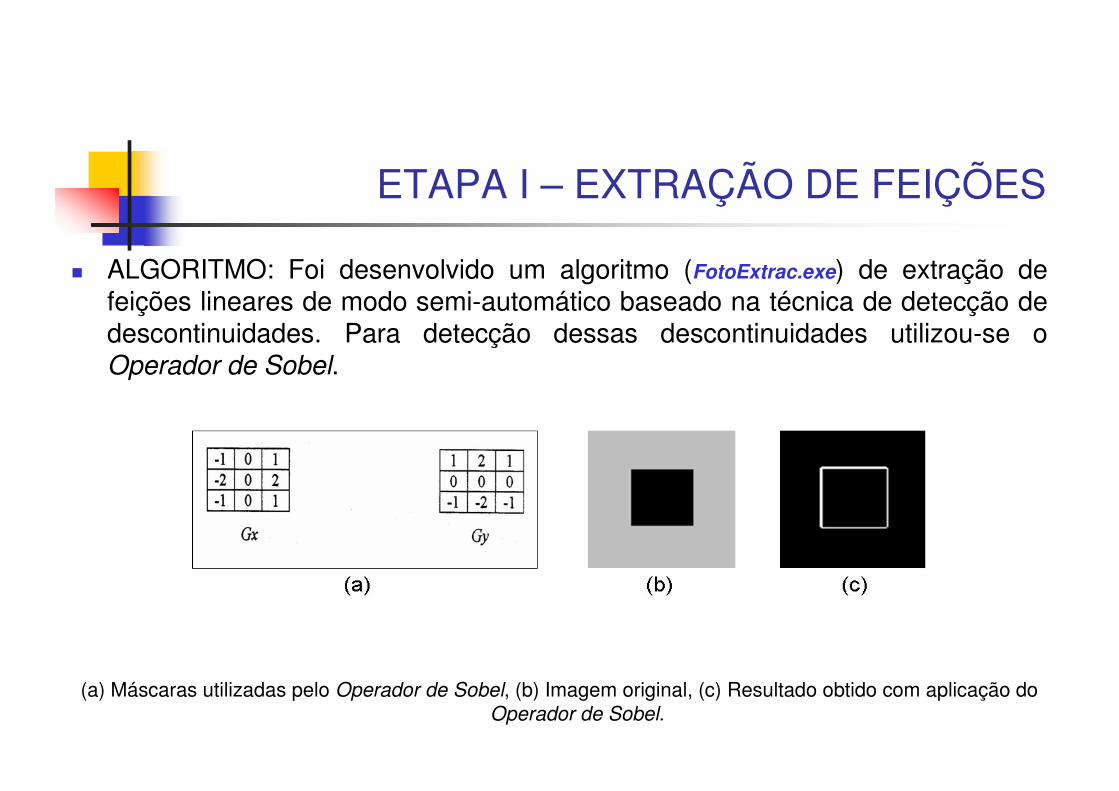
� ALGORITMO: Foi desenvolvido um algoritmo (FotoExtrac.exe) de extração de feições lineares de modo semi-automático baseado na técnica de detecção de descontinuidades. Para detecção dessas descontinuidades utilizou-se o Operador de Sobel.
(a) Máscaras utilizadas pelo Operador de Sobel, (b) Imagem original, (c) Resultado obtido com aplicação do Operador de Sobel.
ETAPA I – EXTRAÇÃO DE FEIÇÕES
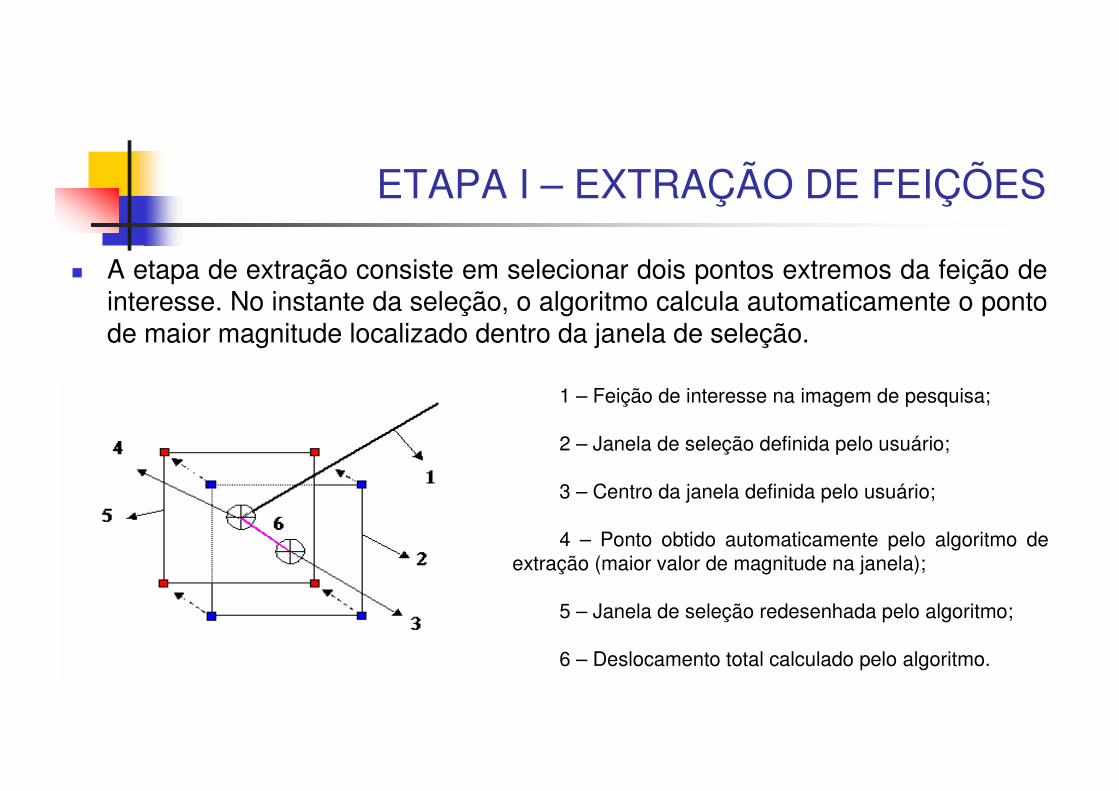
� A etapa de extração consiste em selecionar dois pontos extremos da feição de interesse. No instante da seleção, o algoritmo calcula automaticamente o ponto de maior magnitude localizado dentro da janela de seleção.
1 – Feição de interesse na imagem de pesquisa;
2 – Janela de seleção definida pelo usuário;
3 – Centro da janela definida pelo usuário;
4 – Ponto obtido automaticamente pelo algoritmo de extração (maior valor de magnitude na janela);
5 – Janela de seleção redesenhada pelo algoritmo;
6 – Deslocamento total calculado pelo algoritmo.
ETAPA I – EXTRAÇÃO DE FEIÇÕES
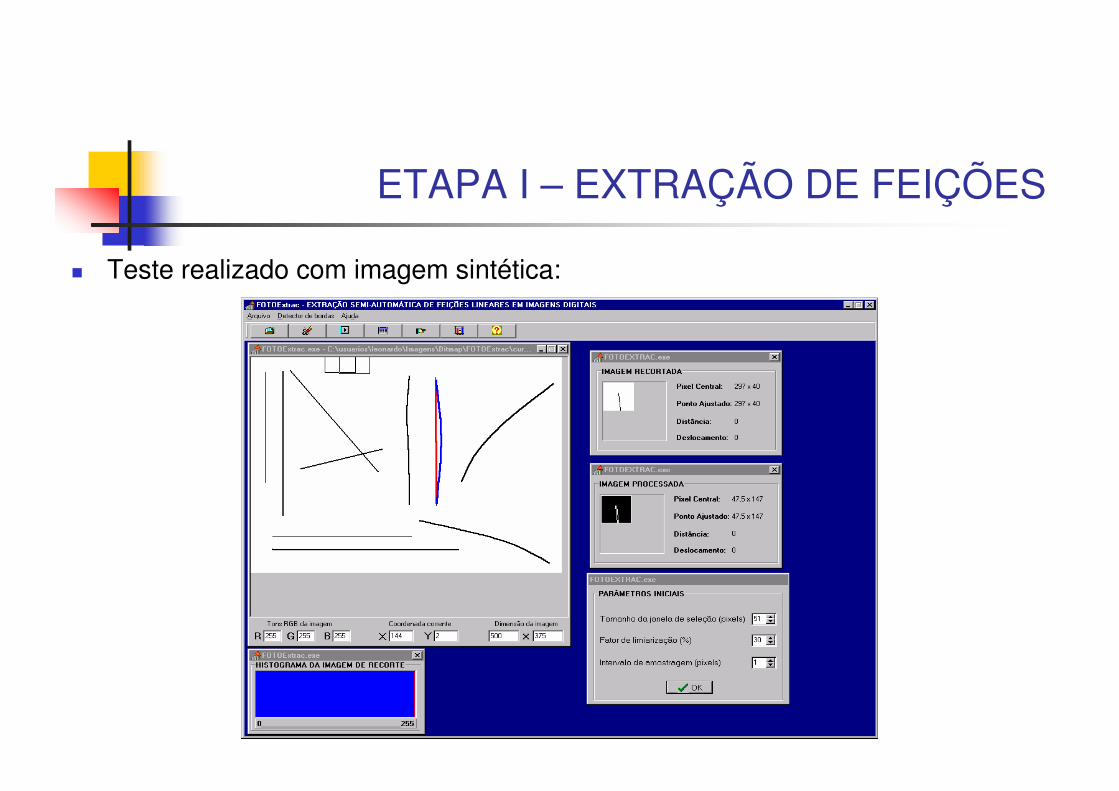
� Teste realizado com imagem sintética:
ETAPA I – EXTRAÇÃO DE FEIÇÕES
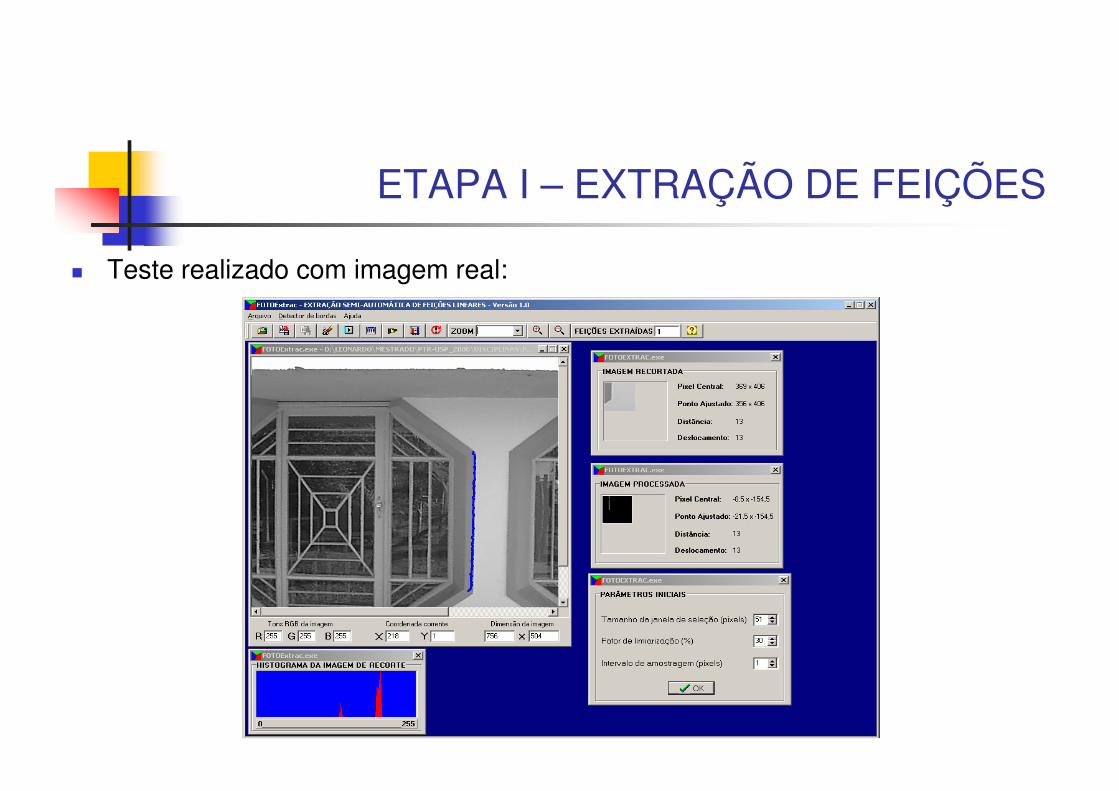
� Teste realizado com imagem real:
ETAPA II – CALIBRAÇÃO
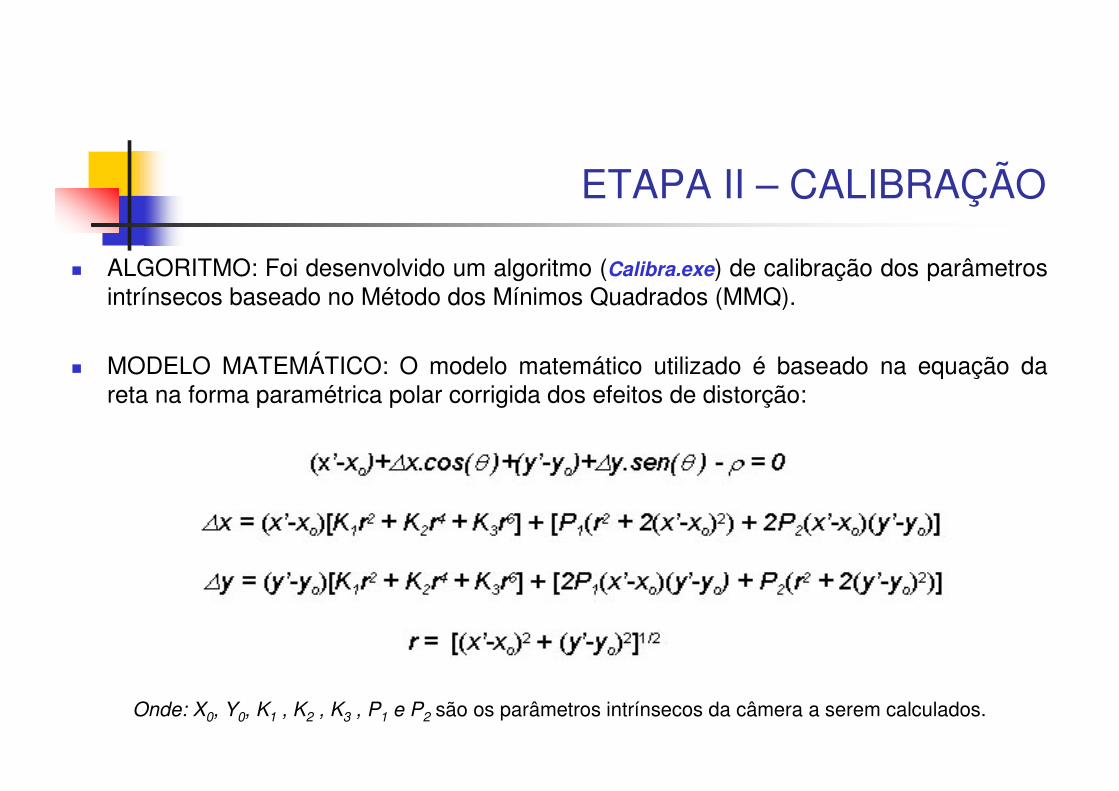
� ALGORITMO: Foi desenvolvido um algoritmo (Calibra.exe) de calibração dos parâmetros intrínsecos baseado no Método dos Mínimos Quadrados (MMQ).
� MODELO MATEMÁTICO: O modelo matemático utilizado é baseado na equação da reta na forma paramétrica polar corrigida dos efeitos de distorção:
Onde: X0, Y0, K1 , K2 , K3 , P1 e P2 são os parâmetros intrínsecos da câmera a serem calculados.
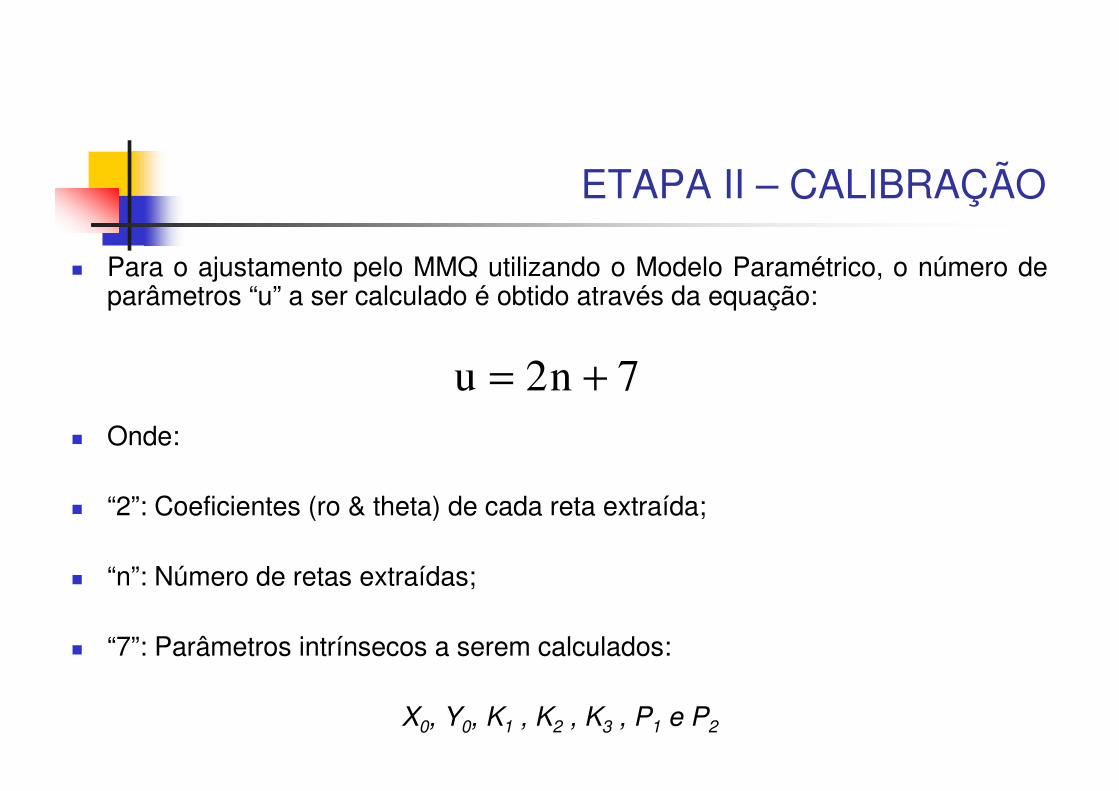
� Para o ajustamento pelo MMQ utilizando o Modelo Paramétrico, o número de parâmetros “u” a ser calculado é obtido através da equação:
� Onde:
� “2”: Coeficientes (ro & theta) de cada reta extraída;
� “n”: Número de retas extraídas;
� “7”: Parâmetros intrínsecos a serem calculados:
X0, Y0, K1 , K2 , K3 , P1 e P2
ETAPA II – CALIBRAÇÃO
7n2u +=
� Os elementos que compõe o ajustamento pelo Modelo Paramétrico são:
� nxuA: Matriz das Derivadas Parciais das “n” equações por “u” parâmetros.
� nx1L0: Vetor das observações iniciais (pontos extraídos sobre as retas).
� nxnP: Matriz “Peso” considerando as observações como “não correlacionadas”, ou seja: P = I (Diagonal “1”).
� ux1Xa: Vetor dos Parâmetros Ajustados.
ETAPA II – CALIBRAÇÃO

ETAPA II – CALIBRAÇÃO
� Estrutura da Matriz A e do Vetor L0:
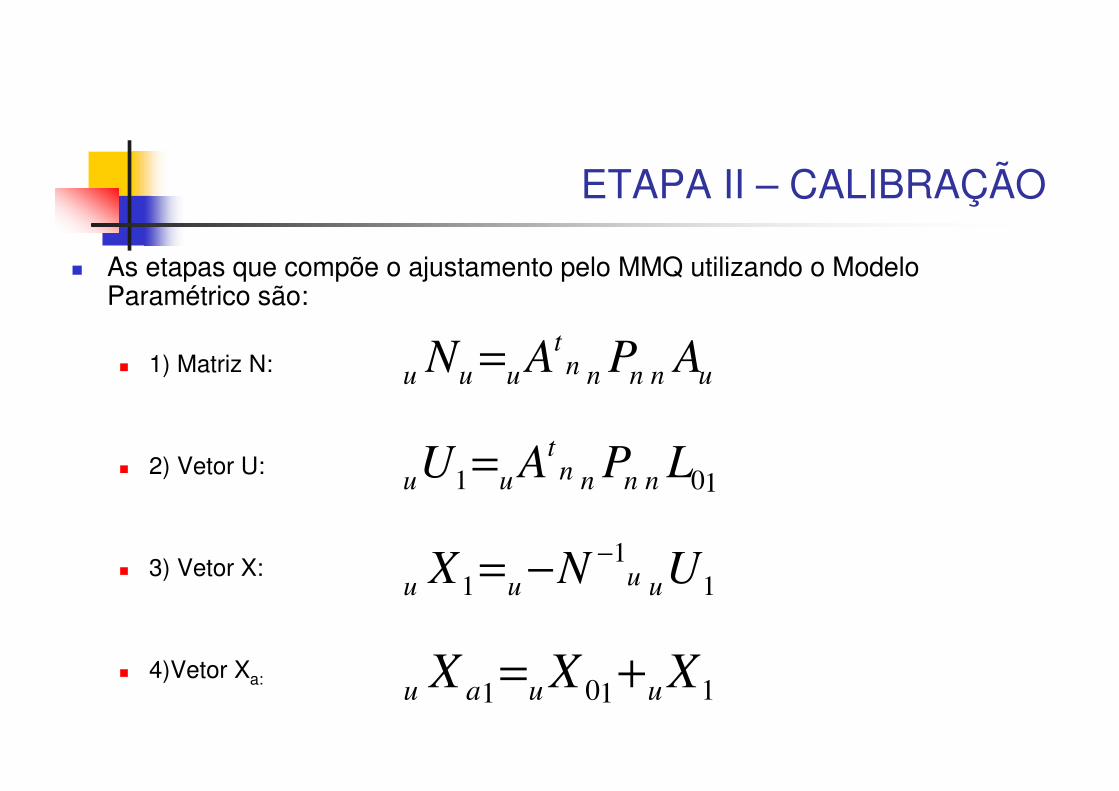
� As etapas que compõe o ajustamento pelo MMQ utilizando o Modelo Paramétrico são:
� 1) Matriz N:
� 2) Vetor U:
� 3) Vetor X:
� 4)Vetor Xa:
ETAPA II – CALIBRAÇÃO
unnnnt
uuu APAN =
101 LPAU nnnnt
uu =
11
1 UNX uuuu−−=
1101 XXX uuau +=

RESULTADOS OBTIDOS
� ETAPA I: Foram realizados testes com o algoritmo de extração de feições utilizando imagens sintéticas (simuladas) e reais afim de se avaliar a precisão do algoritmo implementado.
(a) Resultado obtido para uma imagem sintética, (b) Resultado obtido para uma imagem real.
RESULTADOS OBTIDOS
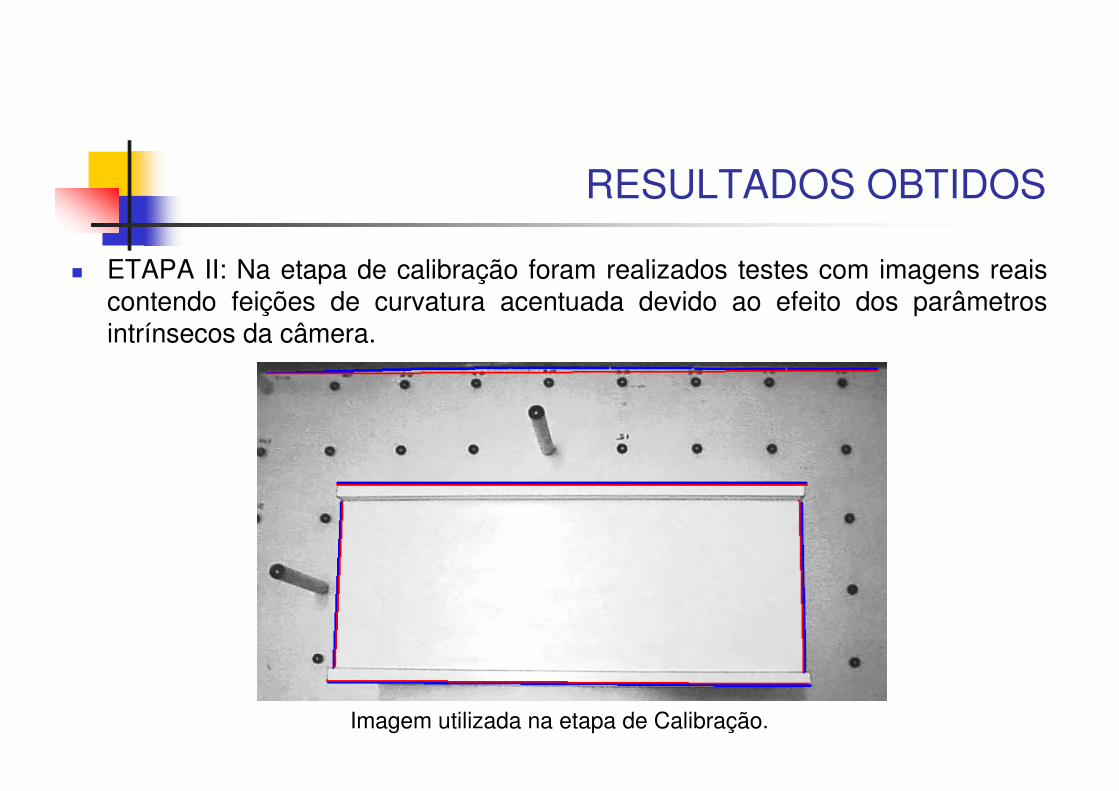
� ETAPA II: Na etapa de calibração foram realizados testes com imagens reais contendo feições de curvatura acentuada devido ao efeito dos parâmetros intrínsecos da câmera.
Imagem utilizada na etapa de Calibração.

RESULTADOS OBTIDOS
� Relatório de Calibração do programa Calibra.exe.
CONCLUSÕES
� Através dos resultados obtidos foi possível verificar que o método utilizado é confiável e viabiliza o processo de calibração utilizando o método de feições lineares.
� O método oferece vantagens pois não necessita de pontos no espaço objeto com coordenadas conhecidas, reduzindo assim o tempo entre coleta e o processamento final, além de eliminar a possibilidade de eventuais erros provenientes da fase de medição.

REFERÊNCIAS
� GONZALEZ, R. C.; WOODS, R. E., Digital Image Processing, Addison Wesley, New York, 1993.
� ARTERO, A. O. (1999) Técnicas para extração automática de feições retas em imagens digitais. Dissertação de Mestrado, Curso de Pós-Graduação em Ciências Cartográficas, UNESP, 117p., Presidente Prudente/SP.
� JAIN, R.; KASTURI, R.; SCHUNK, B. G. (1995) Machine Vision. McGraw - Hill International Editions, Computer Science Series, 549p..
� GALO, M. (1993). Calibração e aplicação de câmaras digitais; Dissertação de Mestrado, Curso de Pós-graduação em Ciências Geodésicas da Universidade Federal do Paraná, 151p., Curitiba PR.
� PRESCOTT, B., McLean, G. F. (1997). Line-based correction of radial lens distortion. Graphical model and image processing, Vol 59, N°1, January, pp. 39-47.
DÚVIDAS, COMENTÁRIOS ?
OBRIGADO !
LEONARDO ERCOLIN FILHOGraduação em Engenharia Cartográfica (1997-2001) – Universidade Estadual Paulista/UNESPPós – Graduação em Engenharia de Transportes (2006) – Universidade de São Paulo/[email protected]@yahoo.com.br