
Executivos (kernels) de tempo-realppedreiras.av.it.pt/resources/str1314/docs/STR-3.pdf · A fila é...
23
Aula 3 Executivos (kernels) de tempo-real Os estados de uma tarefa Arquitetura genérica de um executivo de tempo-real Estruturas e funções típicas do executivo Sistemas de Tempo-Real Adaptado dos slides desenvolvidos pelo Prof. Doutor Luís Almeida para a disciplina “Sistemas de Tempo-Real” Revisto em 24.Set.2013 por Paulo Pedreiras
Transcript of Executivos (kernels) de tempo-realppedreiras.av.it.pt/resources/str1314/docs/STR-3.pdf · A fila é...

Aula 3
Executivos (kernels) de tempo-real
Os estados de uma tarefa Arquitetura genérica de um executivo de tempo-real
Estruturas e funções típicas do executivo
Sistemas de Tempo-Real
Adaptado dos slides desenvolvidos pelo Prof. Doutor Luís Almeida para a disciplina “Sistemas de Tempo-Real”Revisto em 24.Set.2013 por Paulo Pedreiras

DETI - STR 13/14 2
Aula anterior (2)
• Modelos computacionais (modelo de tempo-real)
• Tarefas de tempo-real: periódicas, esporádicas e aperiódicas
• Restrições temporais do tipo deadline, janela, sincronismo e distância
• Implementação de tarefas e utilização de um kernel multitasking
• Controlo lógico e controlo temporal
• Tarefas event-triggered e time-triggered
DETI - STR 13/14 3
Estados de uma tarefa
Criação de uma tarefa
associação do código (e.g. função em linguagem “C”) a um espaço de variáveis privado (private stack) e a uma estrutura de gestão (task control block – TCB)
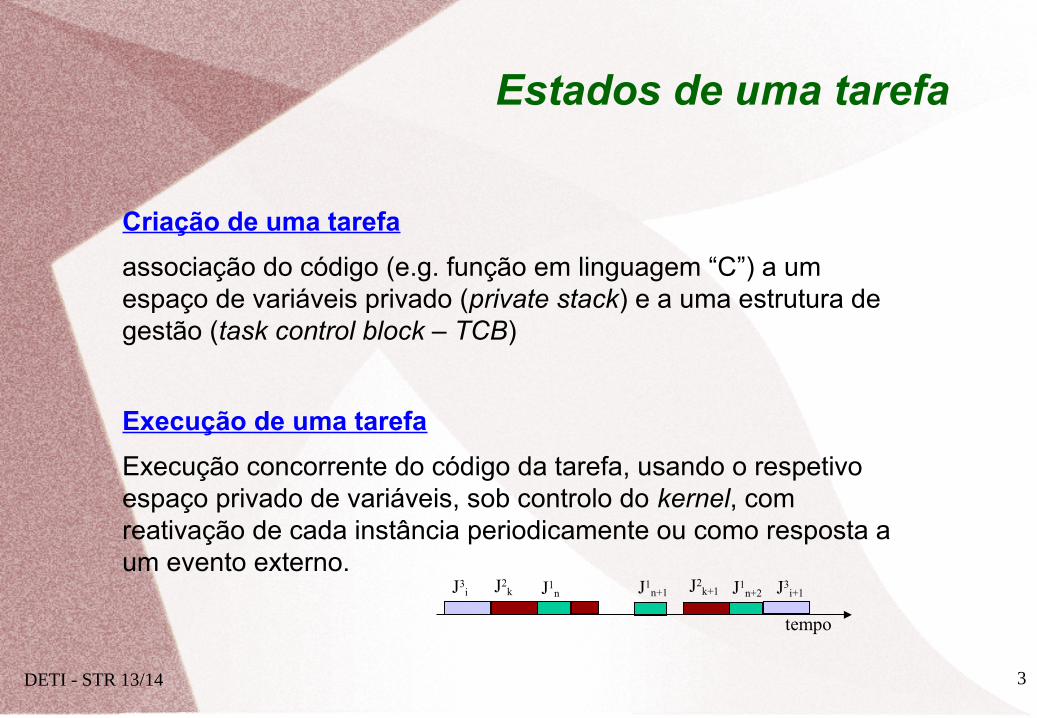
Execução de uma tarefa
Execução concorrente do código da tarefa, usando o respetivo espaço privado de variáveis, sob controlo do kernel, com reativação de cada instância periodicamente ou como resposta a um evento externo.
tempo
J1n J1
n+1 J1n+2J2
k J2k+1J3
i J3i+1
DETI - STR 13/14 4
Estados de uma tarefa
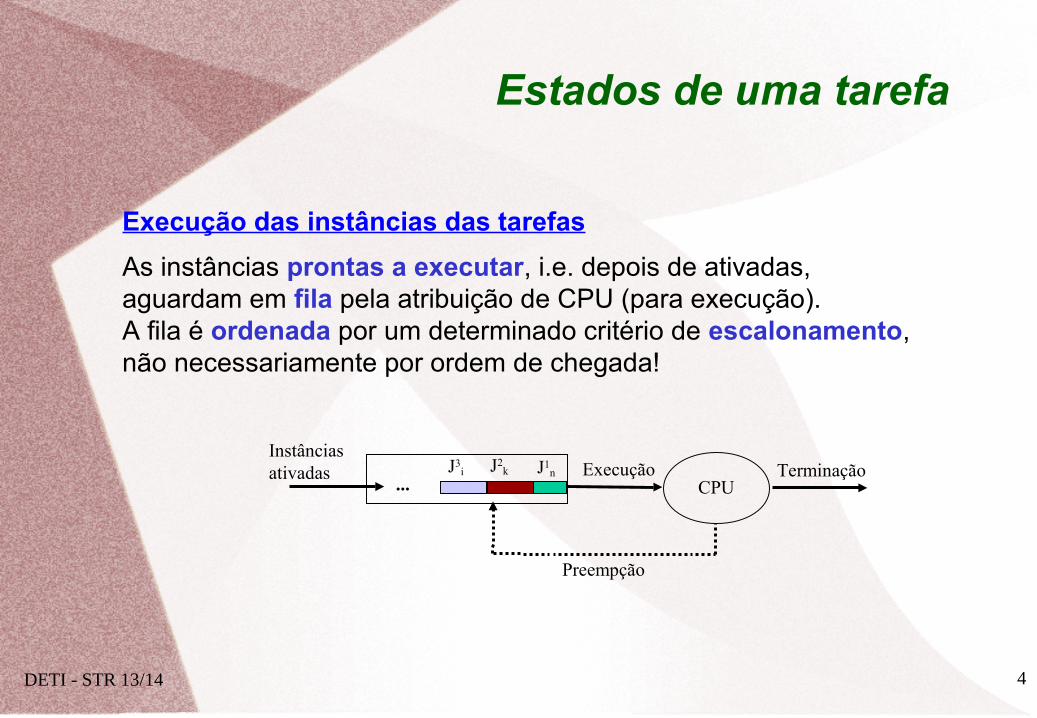
Execução das instâncias das tarefas
As instâncias prontas a executar, i.e. depois de ativadas, aguardam em fila pela atribuição de CPU (para execução).A fila é ordenada por um determinado critério de escalonamento, não necessariamente por ordem de chegada!
J1n
...J2
k
Instâncias ativadas J3
i ExecuçãoCPU
Preempção
Terminação
DETI - STR 13/14 5
Estados de uma tarefa
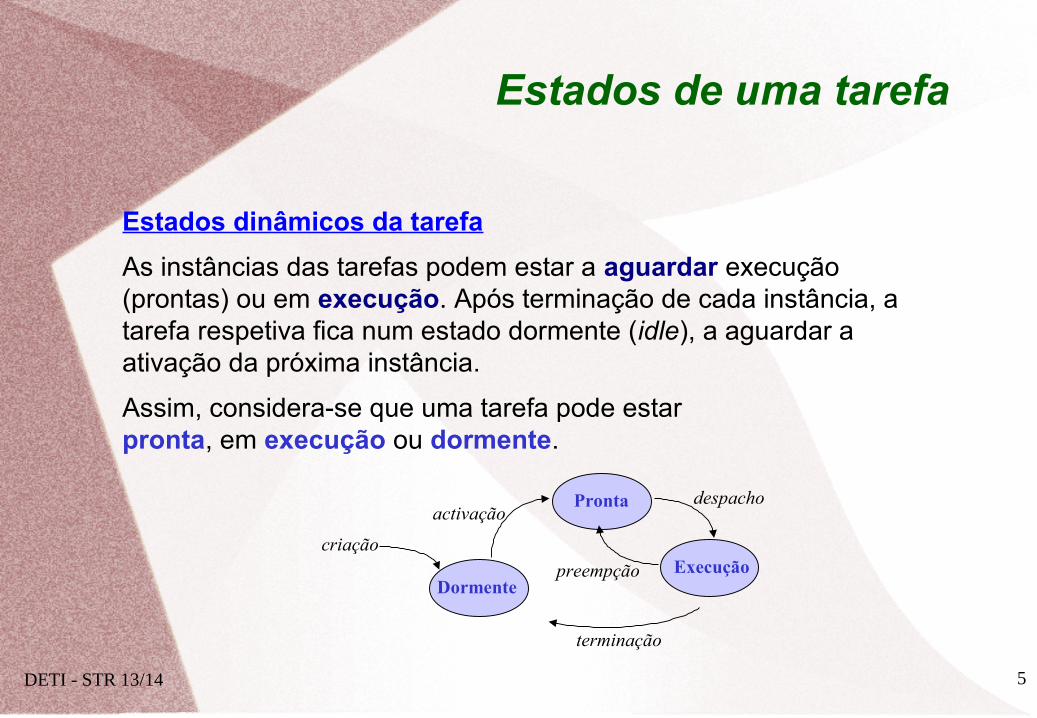
Estados dinâmicos da tarefa
As instâncias das tarefas podem estar a aguardar execução (prontas) ou em execução. Após terminação de cada instância, a tarefa respetiva fica num estado dormente (idle), a aguardar a ativação da próxima instância.
Assim, considera-se que uma tarefa pode estarpronta, em execução ou dormente.
Pronta
terminação
DormenteExecução
activaçãodespacho
preempção
criação
DETI - STR 13/14 6
Estados de uma tarefa
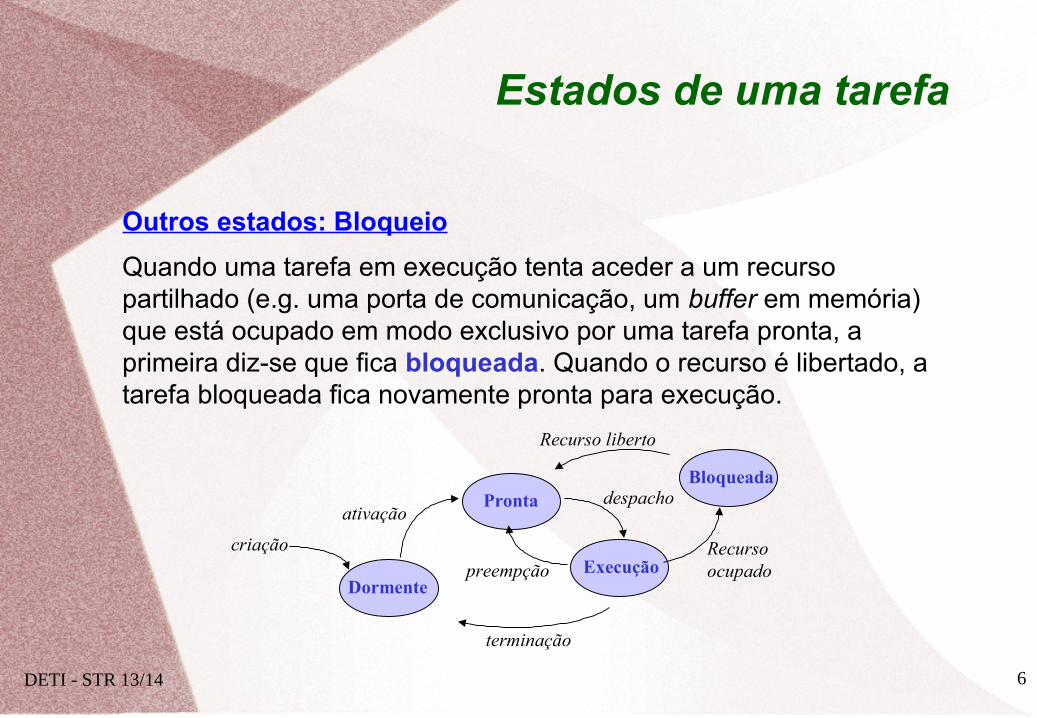
Outros estados: Bloqueio
Quando uma tarefa em execução tenta aceder a um recurso partilhado (e.g. uma porta de comunicação, um buffer em memória) que está ocupado em modo exclusivo por uma tarefa pronta, a primeira diz-se que fica bloqueada. Quando o recurso é libertado, a tarefa bloqueada fica novamente pronta para execução.
Pronta
terminação
DormenteExecução
ativaçãodespacho
preempção
criação
Bloqueada
Recurso liberto
Recurso ocupado
DETI - STR 13/14 7
Estados de uma tarefa
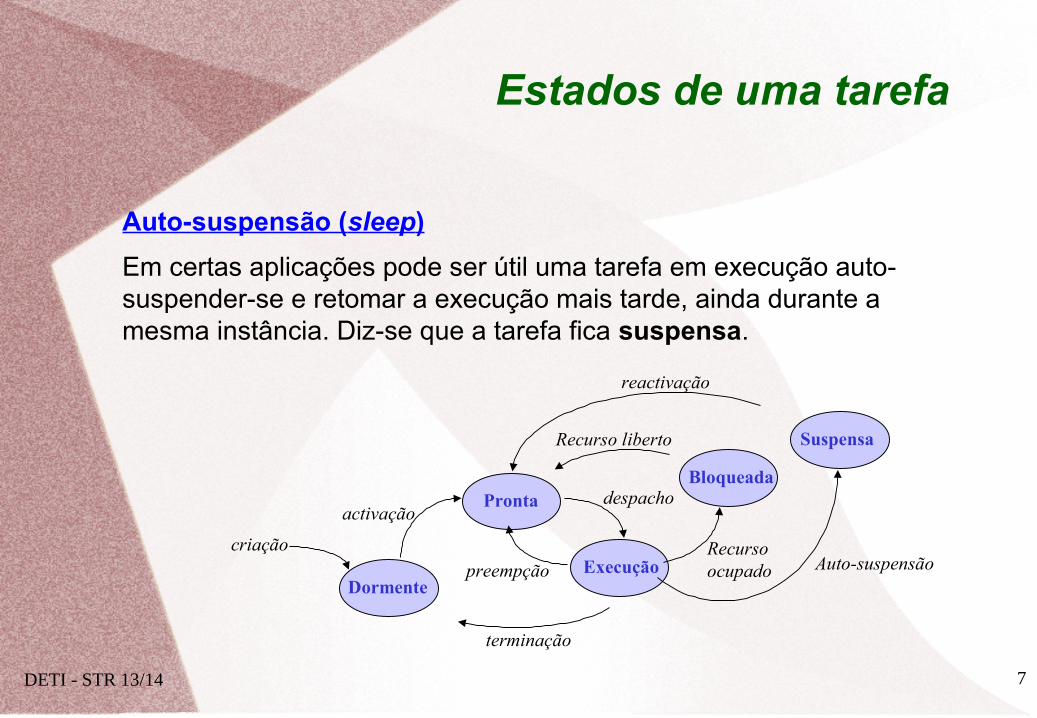
Auto-suspensão (sleep)
Em certas aplicações pode ser útil uma tarefa em execução auto-suspender-se e retomar a execução mais tarde, ainda durante a mesma instância. Diz-se que a tarefa fica suspensa.
Pronta
terminação
DormenteExecução
activaçãodespacho
preempção
criação
Bloqueada
Recurso liberto
Recurso ocupado
Suspensa
Auto-suspensão
reactivação
DETI - STR 13/14 8
Arquitetura de um kernel tempo-real
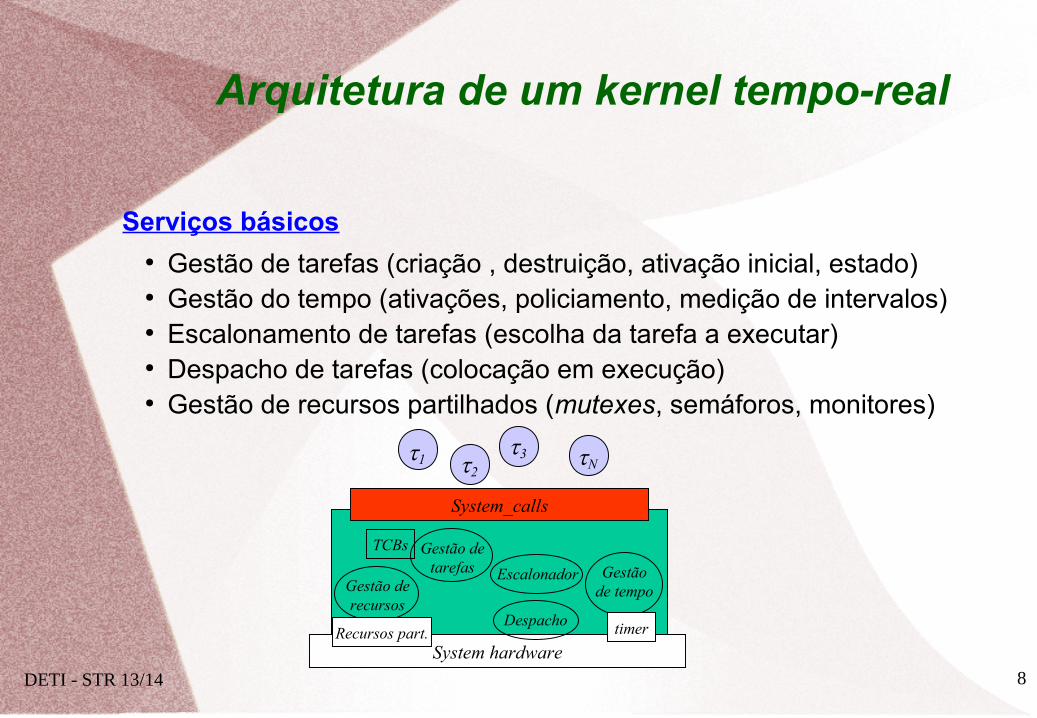
Serviços básicos● Gestão de tarefas (criação , destruição, ativação inicial, estado)● Gestão do tempo (ativações, policiamento, medição de intervalos)● Escalonamento de tarefas (escolha da tarefa a executar)● Despacho de tarefas (colocação em execução)● Gestão de recursos partilhados (mutexes, semáforos, monitores)
1
System_calls
System hardware
2N
3
Gestão de tempo
timerDespacho
Escalonador
Gestão de tarefas
Gestão de recursos
Recursos part.
TCBs
DETI - STR 13/14 9
Estruturas de gestão
TCB (task control block)
Esta estrutura é fundamental num kernel e serve para caracterizar a tarefa, bem como para gerir a respetiva execução.
Alguns campos usuais:● Identificador● Ponteiro para o código a ser executado● Ponteiro para o stack privado (salvaguarda do contexto)● Atributos de ativação (periódica, (fase inicial), esporádica,
aperiódica)● Atributos de criticalidade (hard, soft, não real-time)● Outros atributos (deadline, prioridade)● Estado dinâmico de execução e outras variáveis para controlo de
ativação (timers de SW, deadline absoluta)
DETI - STR 13/14 10
Estruturas de gestão
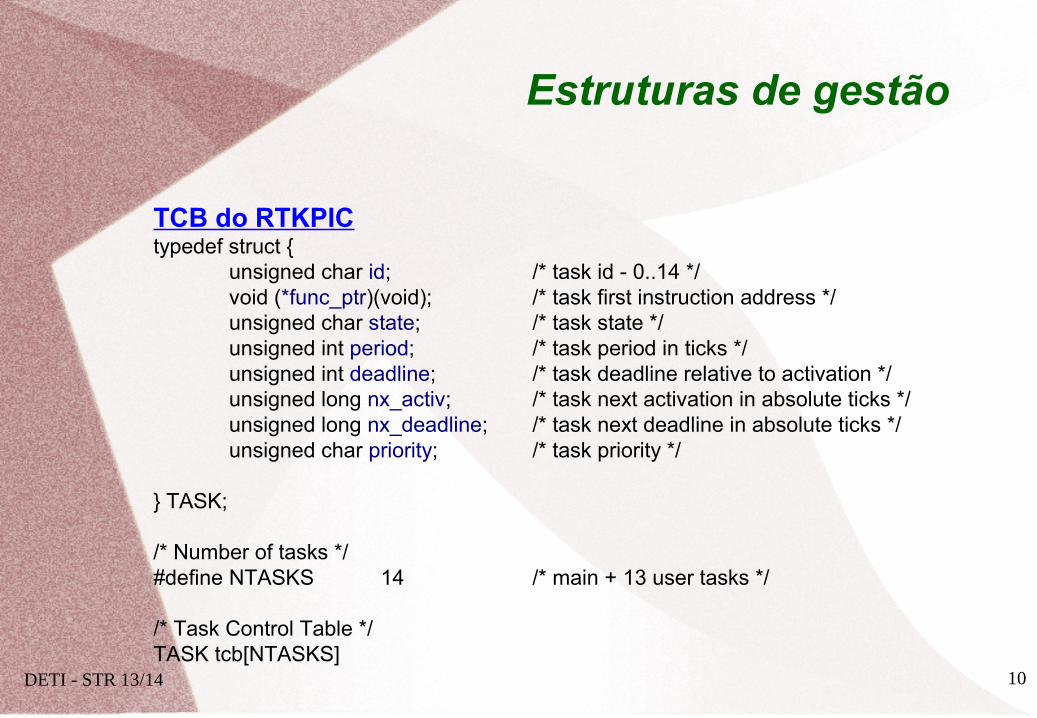
TCB do RTKPICtypedef struct {
unsigned char id; /* task id - 0..14 */void (*func_ptr)(void); /* task first instruction address */unsigned char state; /* task state */unsigned int period; /* task period in ticks */unsigned int deadline; /* task deadline relative to activation */unsigned long nx_activ; /* task next activation in absolute ticks */unsigned long nx_deadline; /* task next deadline in absolute ticks */ unsigned char priority; /* task priority */
} TASK;
/* Number of tasks */#define NTASKS 14 /* main + 13 user tasks */
/* Task Control Table */TASK tcb[NTASKS]

DETI - STR 13/14 11
Estruturas de gestão
Estrutura de TCBs
Normalmente, os TCBs estão definidos num array estático mas estruturados segundo uma lista ligada para facilitar buscas sobre o conjunto das tarefas (poderá haver mais TCBs que tarefas!)
Qualquer lista ordenada (e.g. das tarefas prontas – ready queue) pode ser facilmente realizada sobre a estrutura de TCBs através de um ponteiro (pode ser um índice) para o próximo TCB na lista.
TCB 1
TCB 2
TCB 3
TCB N
...TCB 4
Topo da lista de tarefas
Apenas 3 TCBs usados1,2 e 4
TCB 1
TCB 2
TCB 3
TCB N
...TCB 4
Topo da lista de tarefas prontas
Tarefas 2 e 4 prontas

DETI - STR 13/14 12
Estruturas de gestão
Estrutura de TCBs no RTKPIC18O RTKPIC18 foi concebido para aplicações com pequeno número de tarefas. Neste caso optou-se por não realizar as filas de tarefas com listas. Sempre que é necessário fazer uma busca, e.g. para efetuar a ativação de tarefas, percorre-se todo o array !
/* Secção do “tick handler” */for (temporary_i = 1; temporary_i < n_task; temporary_i++){
temporary_task_i = tcb + temporary_i;if (temporary_task_i->nx_activ == system_clock){ /* new activation */
if ((temporary_task_i->state == READY) || (temporary_task_i->state == RUN)) deadline_miss |= (0x01 << temporary_i); /* deadline missing */
temporary_task_i->state = READY;temporary_task_i->nx_activ += temporary_task_i->period;
if ((preempt_sys == PREEMPT) || (run_task_id == 0))Call_scheduler = 1; /* New task READY: Call scheduler */
if (sch_alg == EDF)Call_EDF = 1; /* Call EDF priority set */
}
Percorre todo o array
Testa se deve activar
Testa se ocorreu
violação de deadline
Altera o estado e invoca o escalonador

DETI - STR 13/14 13
Estruturas de gestão
Acesso a recursos partilhados
Os recursos partilhados com acesso exclusivo (regiões críticas) têm, tal como o CPU, de ser geridos de forma apropriada de modo a serem acedidos por uma tarefa de cada vez. Uma forma comum de efetuar este controlo é recorrer a flags atómicas (mutexes), monitores (execução não preemptiva) ou semáforos.
No caso de se utilizarem semáforos, deverá haver uma estrutura por semáforo que indique o respetivo estado bem como a lista de tarefas a aguardar acesso – SCB (semaphore control block)
No RTKPIC apenas existe apenas controlo da preempção, a qual pode ser inibida.
Contador (estado)Lista de tarefas à espera
SCB
DETI - STR 13/14 14
Funções de gestão
Gestão do tempo
A gestão do tempo num kernel é fundamental e serve para:
● Ativar as tarefas periódicas
● Verificar cumprimento de restrições temporais
● Medir intervalos de tempo (inclusive para auto-suspensão)
É efetuada com recurso a um timer do sistema. O timer pode ser programado como:
● Periodic tick: gerar interrupções periódicas (ticks). O respetivo handler faz a gestão do tempo. Os atributos temporais são múltiplos inteiros do tick.
● Single-shot/One-shot/tickless: o timer é programado para gerar interrupções apenas nos precisos instantes em que existe ativação de uma ou mais tarefas.
DETI - STR 13/14 15
Funções de gestão
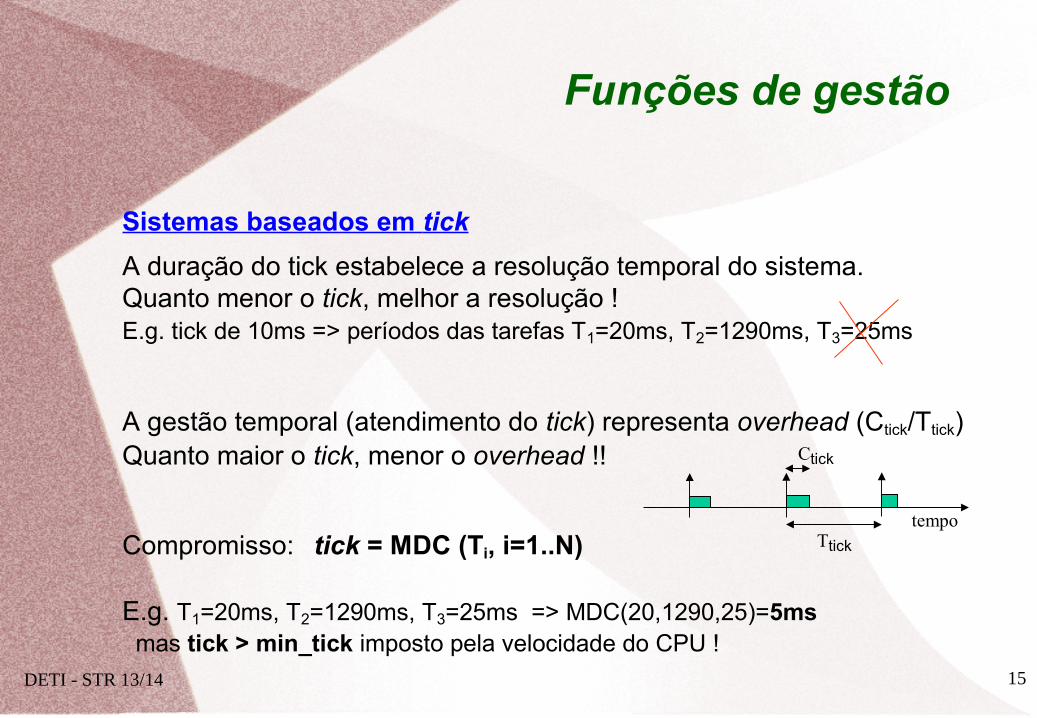
Sistemas baseados em tick
A duração do tick estabelece a resolução temporal do sistema.Quanto menor o tick, melhor a resolução ! E.g. tick de 10ms => períodos das tarefas T1=20ms, T2=1290ms, T3=25ms
A gestão temporal (atendimento do tick) representa overhead (Ctick/Ttick)Quanto maior o tick, menor o overhead !!
Compromisso: tick = MDC (Ti, i=1..N)
E.g. T1=20ms, T2=1290ms, T3=25ms => MDC(20,1290,25)=5ms mas tick > min_tick imposto pela velocidade do CPU !
tempoTtick
Ctick
DETI - STR 13/14 16
Funções de gestão
Medição de intervalos de tempo
Em sistemas com ticks, o kernel mantém uma variável que conta o nº de ticks desde a respetiva ativação
• e.g. no RTKPIC “unsigned long system_clock”, lida pela macro get_sys_time()
• com tick=10ms, esta variável faz wrap around após 1,6 anos
Para maior precisão é necessário ler diretamente o timer. Para maior longevidade é necessário usar outro contador suplementar.
Em CPUs Pentium, com um relógio de 1GHz, o TSC faz wrap around após 486 anos !!!
DETI - STR 13/14 17
Funções de gestão
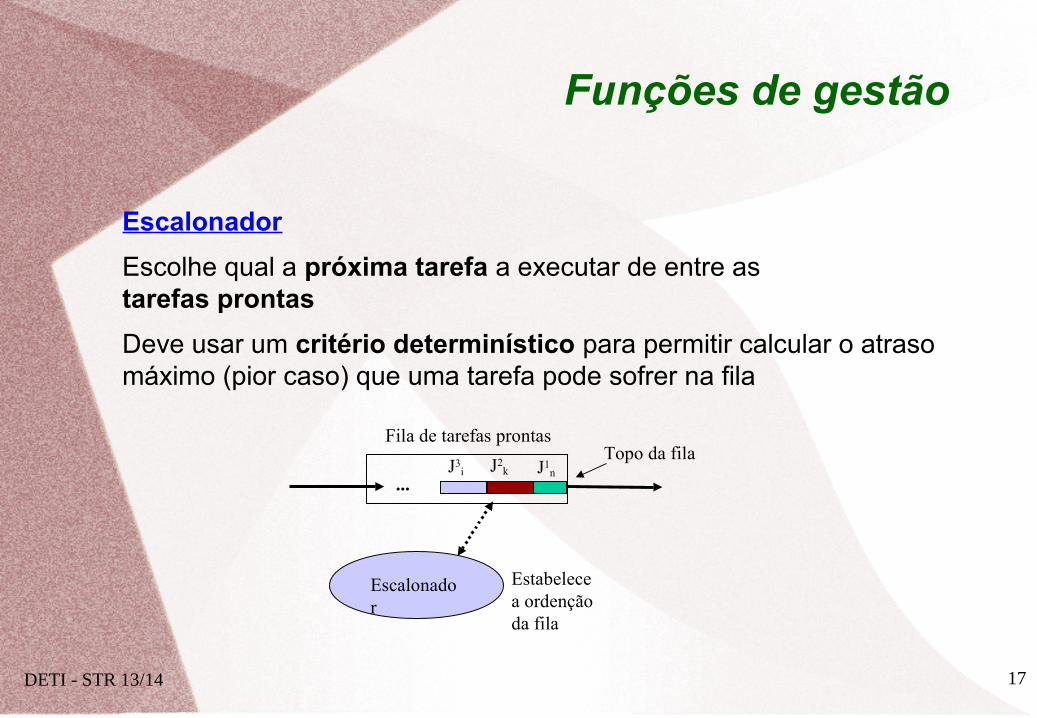
Escalonador
Escolhe qual a próxima tarefa a executar de entre as tarefas prontas
Deve usar um critério determinístico para permitir calcular o atraso máximo (pior caso) que uma tarefa pode sofrer na fila
J1n
...J2
k
Fila de tarefas prontas
J3i
Topo da fila
Escalonador
Estabelece a ordenção da fila
DETI - STR 13/14 18
Funções de gestão
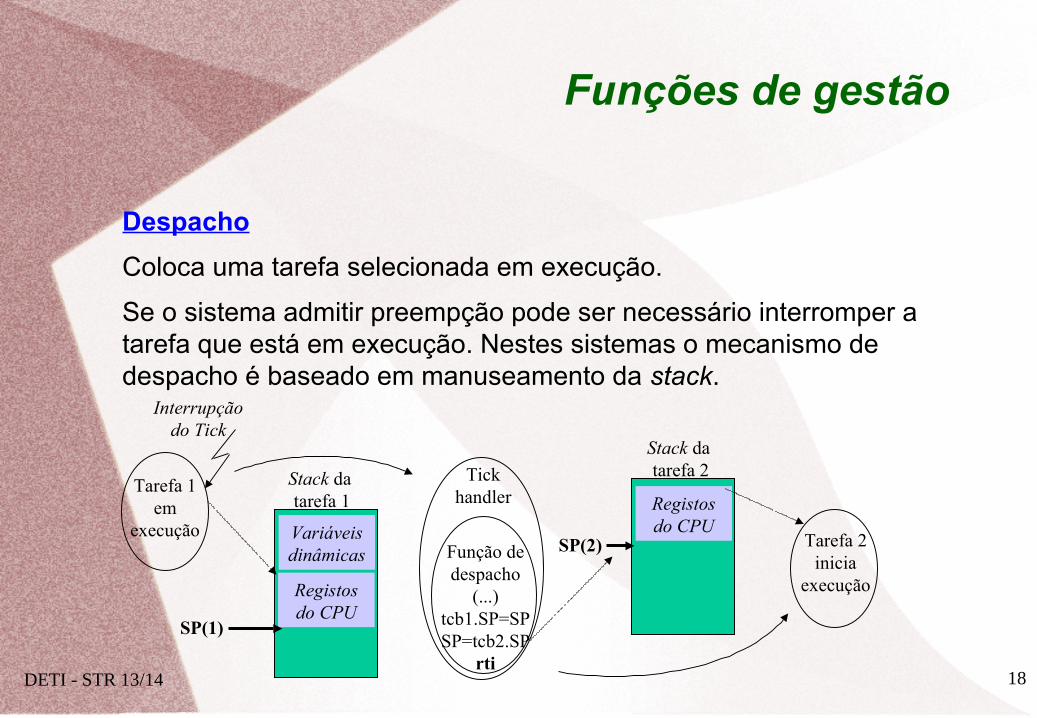
Despacho
Coloca uma tarefa selecionada em execução.
Se o sistema admitir preempção pode ser necessário interromper a tarefa que está em execução. Nestes sistemas o mecanismo de despacho é baseado em manuseamento da stack.
Tarefa 1 em
execução
Stack da tarefa 1
Tarefa 2 inicia
execução
Stack da tarefa 2
Função de despacho
(...)tcb1.SP=SPSP=tcb2.SP
rti
Variáveis dinâmicas
Registos do CPU
Interrupção do Tick
Tick handler Registos
do CPU
SP(1)
SP(2)
DETI - STR 13/14 19
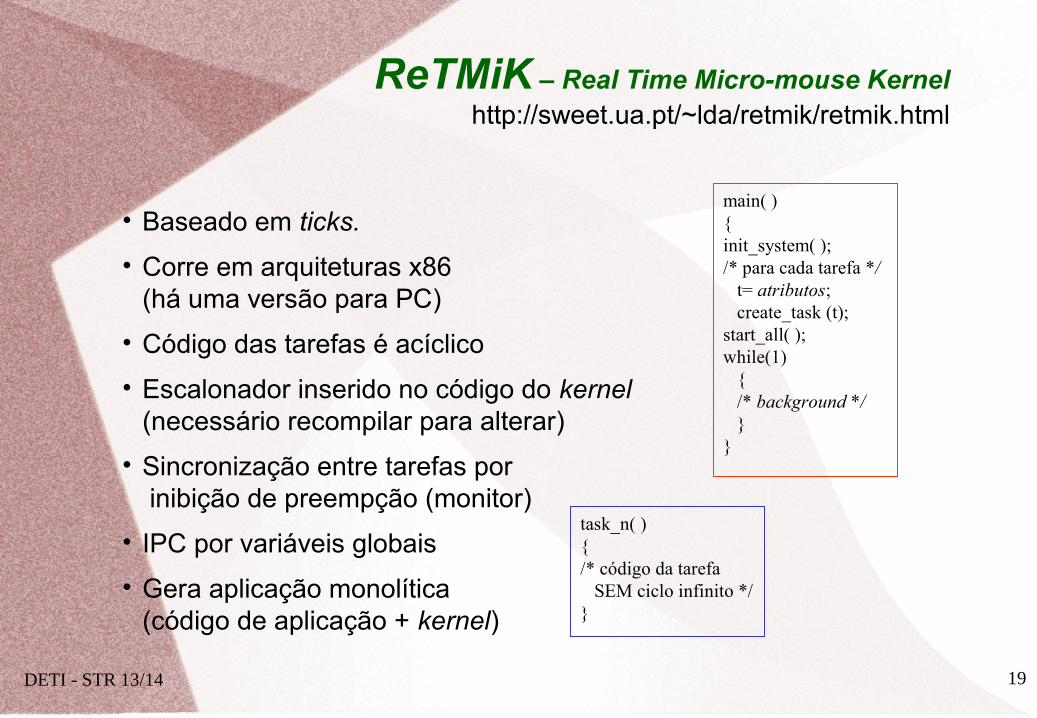
ReTMiK – Real Time Micro-mouse Kernel http://sweet.ua.pt/~lda/retmik/retmik.html
• Baseado em ticks.
• Corre em arquiteturas x86(há uma versão para PC)
• Código das tarefas é acíclico
• Escalonador inserido no código do kernel (necessário recompilar para alterar)
• Sincronização entre tarefas por inibição de preempção (monitor)
• IPC por variáveis globais
• Gera aplicação monolítica(código de aplicação + kernel)
main( ){init_system( );/* para cada tarefa */ t= atributos; create_task (t);start_all( );while(1) { /* background */ }}
task_n( ){/* código da tarefa SEM ciclo infinito */}

DETI - STR 13/14 20
RTKPIC – Real-Time Kernel for PIC18
main( ){ create_system(... ); /* para cada tarefa */ create_task (...);
config_system(); release_system( ); while(1) { /* background */ }}
task_n( ){
task_init();
while(1) { /* código da tarefa*/ }
}
Baseado no ReTMiK• Baseado em ticks
• Corre em processadores PIC18FXXX
• Código das tarefas é cíclico
• Escalonador inserido no código do kernel (necessário recompilar para alterar)
• Controlo de preempção
• IPC por variáveis globais
• Gera aplicação monolítica(código de aplicação + kernel)

DETI - STR 13/14 21
SHaRK – Soft and Hard Real Time Kernelhttp://shark.sssup.it/
• Objetivo principal de obter flexibilidade na modificação das políticas de escalonamentoquer para CPU quer para recursos partilhados
• POSIX (parcial/ compatível)
• Arquiteturas x86 >= i386
• Código das tarefas cíclico
• Variados métodos de IPC
• Conceito de Task Model(HRT, SRT, NRT, per, aper) e de Scheduling Module
• Policiamento, controlo de admissão
• Gera aplicação monolítica
0
Dados globais
hardware
N
Kernel genérico
livrariasEDF
OSLib
RM
TBS
DS
PCP
PIP
SRP
void * TaskBody (void *arg){/* inicialização */while (cond) { /* código da tarefa */ (...) task_endcycle( );}/* termina com “cond” */return my_val;}
NRT
InitFile(declaração dos módulos)
tarefa __init__(inicializações e chama main( ) )
int main ( ){/* outras inicializações *//* definir tarefas de acordo com o Task Model */ task_create ( ); task_activate ( );/* pode terminar ou esperar para fechar o sistema */while (keyb_getchar( )!=ESC);sys_end ( );}
DETI - STR 13/14 22
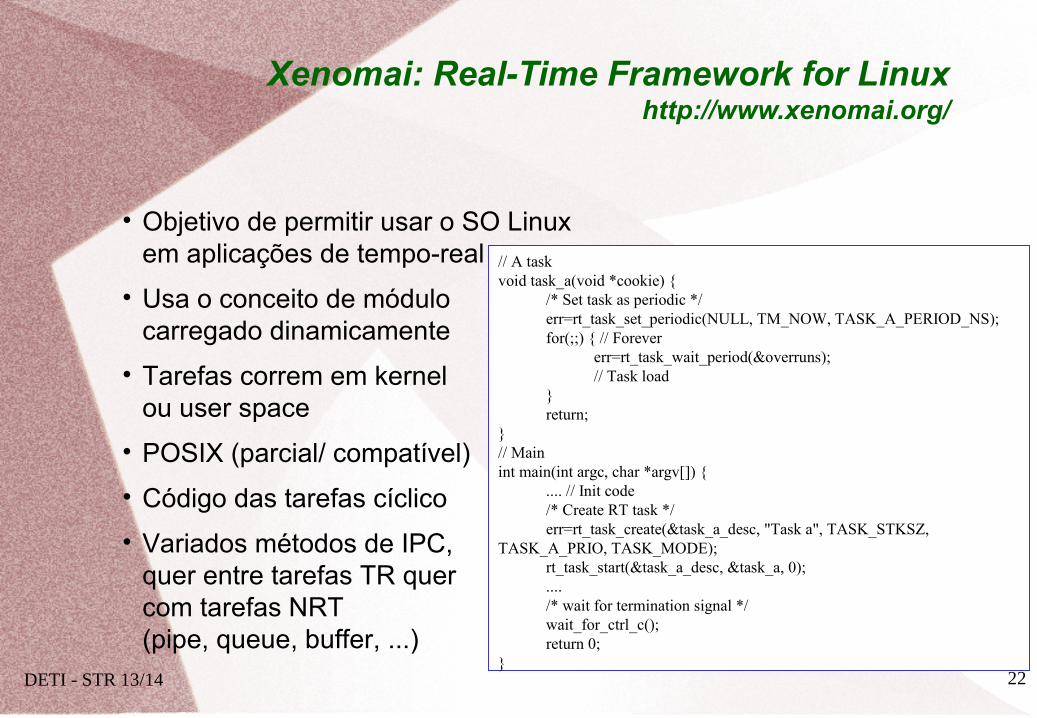
Xenomai: Real-Time Framework for Linuxhttp://www.xenomai.org/
• Objetivo de permitir usar o SO Linuxem aplicações de tempo-real
• Usa o conceito de módulocarregado dinamicamente
• Tarefas correm em kernel ou user space
• POSIX (parcial/ compatível)
• Código das tarefas cíclico
• Variados métodos de IPC, quer entre tarefas TR quer com tarefas NRT(pipe, queue, buffer, ...)
// A taskvoid task_a(void *cookie) {
/* Set task as periodic */err=rt_task_set_periodic(NULL, TM_NOW, TASK_A_PERIOD_NS);for(;;) { // Forever
err=rt_task_wait_period(&overruns);// Task load
}return;
}// Mainint main(int argc, char *argv[]) {
.... // Init code/* Create RT task */err=rt_task_create(&task_a_desc, "Task a", TASK_STKSZ,
TASK_A_PRIO, TASK_MODE);rt_task_start(&task_a_desc, &task_a, 0);..../* wait for termination signal */wait_for_ctrl_c();return 0;
}
DETI - STR 13/14 23
Resumo da Aula 3
• Os estados de execução de uma tarefa
– diagrama de transição de estados
• A arquitetura genérica de um kernel de tempo-real
• Os componentes básicos de um kernel de tempo-real, estruturas de dados e funções
• Exemplos: ReTMiK, RTKPIC18, SHaRK e XENOMAI









![Escalonamento de Sistemas de Tempo Real Sergio Cavalcante Centro de Informática – UFPE str-l@cin.ufpebrsvc@cin.ufpe.br Assunto: [str] 8835095034254714.](https://static.fdocumentos.tips/doc/165x107/570638651a28abb8239021b0/escalonamento-de-sistemas-de-tempo-real-sergio-cavalcante-centro-de-informatica.jpg)





![Escalonamento de Sistemas de Tempo Real Sergio Cavalcante Centro de Informática – UFPE str-l@cin.ufpe.brsvc@cin.ufpe.br Assunto: [str] 8835095034254714.](https://static.fdocumentos.tips/doc/165x107/552fc14f497959413d8e3071/escalonamento-de-sistemas-de-tempo-real-sergio-cavalcante-centro-de-informatica-ufpe-str-lcinufpebrsvccinufpebr-assunto-str-8835095034254714.jpg)

![Introdução aos Sistemas de Tempo Real Sergio Cavalcante Centro de Informática – UFPE str-l@cin.ufpe.brsvc@cin.ufpe.br Assunto: [str] 8835095034254714.](https://static.fdocumentos.tips/doc/165x107/552fc14f497959413d8e306d/introducao-aos-sistemas-de-tempo-real-sergio-cavalcante-centro-de-informatica-ufpe-str-lcinufpebrsvccinufpebr-assunto-str-8835095034254714.jpg)
