DETECÇÃO DE FALHA EM MOTORES DE INDUÇÃO … · Figura 1: Representação de um enrolamento...
8
1 DETECÇÃO DE FALHA EM MOTORES DE INDUÇÃO TRIFÁSICOS POR MEIO DE INSTRUMENTO VIRTUAL ANA PAULA L. SANTOS*, LÍVIA DE FÁTIMA SILVA MENDES*, MÁRCIO F. S. BARROSO*, LANE RABELO BACCARINI*, * Programa de Pós Graduação em Engenharia Elétrica, Universidade Federal de São João del-Rei Praça Frei Orlando 170, Centro, 36307-352, São João del-Rei, MG, Brasil E-mails:[email protected], [email protected], [email protected], [email protected] Abstract This paper presents the application of identified NARX models in the recursive parameter estimation of a Three Phase Induction Motor (MIT) for the detection of electrical failure. The methodology is used to build a virtual instrument, which aims to adjust the variable gain model and detect the situation of initial short-circuit at MIT by the variation of the values of model parameters. Keywords Fault Detection; System Identification; Recursive Parameter Estimation; Three Phase Induction Motor. Resumo Este artigo apresenta a aplicação de modelos NARX identificados na estimação recursiva de parâmetros de um Mo- tor de Indução Trifásico (MIT) para a detecção de falha elétrica. A metodologia é utilizada na construção de um instrumento vir- tual, o qual objetiva ajustar o ganho variável do modelo e detectar a situação de curto-circuito inicial no MIT através da variação nos valores dos parâmetros do modelo. Palavras-chave Detecção de Falhas; Identificação de Sistemas; Estimação Recursiva de Parâmetros; Motor de Indução Trifá- sico. 1 Introdução Os motores de indução trifásicos e monofásicos são as máquinas rotativas mais utilizadas atualmen- te, sendo responsáveis por aproximadamente do total de motores instalados (Massirer, 2007). Suas características operacionais garantem confiabi- lidade, robustez, simplicidade de construção e baixo custo. A importância dos motores de indução nas plantas industriais torna a confiabilidade da opera- ção destas máquinas um ponto crítico, devido ao alto custo de uma parada no processo produtivo, os quais podem representar de a do custo total de muitos produtos (Avelar et al., 2011). Uma vez que é economicamente inviável man- ter máquinas sobressalentes, o monitoramento on- line das máquinas de indução é importante para uma operação segura e qualidade da produção, (Baccarini et al., 2010). A busca por técnicas de detecção e diagnóstico de falhas receberam grande atenção da comunidade científica nos últimos anos, destacando-se: Filippetti et al., 1998; Thomson and Fenger, 2001; Boqiang et al., 2003; Tan and Hong Huo, 2005; Tallam et al., 2007; Bellini et al., 2008; Baccarini et al., 2010; Martins et al., 2010; Pezzani et al., 2010; Razik et al., 2010; Avelar et al., 2011; Brito et al., 2012. Os objetivos de tais estudos são interpretar pre- cocemente a falha incipiente e definir um correto diagnóstico, para que não ocorra uma manutenção não programada e uma parada no processo produti- vo (Santos et al., 2012). Os fatores que afetam o comportamento do mo- tor podem ser agrupados em problemas de origem magnética ou elétrica e problemas de origem mecâ- nica (Baccarini et al., 2010). As falhas podem ser internas: barras quebradas e/ou trincadas, rolamen- tos danificados, curto circuito entre espiras, excen- tricidade, desalinhamento, desbalanceamento de massa; ou externas: sobrecarga mecânica, desequilí- brio de fases, subtensão, sobretensão e presença de harmônicos. De acordo com (Thomson and Fenger, 2001), os percentuais de falhas relacionados aos compo- nentes dos motores de indução são de aproximada- mente: 38% no estator, 10% no rotor, 40% nos ro- lamentos e 12% nos demais. O enrolamento de estator de uma máquina de indução está sujeito às tensões induzidas por uma variedade de fatores, que incluem picos térmicos de sobrecarga, vibrações e picos de tensão. Sua deterio- ração geralmente começa com uma falha entre espi- ras envolvendo poucas voltas do enrolamento. No entanto, se mantida, essa situação pode evoluir para falta para a terra, o que resultaria em danos irrever- síveis ao núcleo da máquina (Boqiang et al., 2003). Atualmente, existem métodos diversificados pa- ra detectar curto-circuito nas espiras do estator, porém muitos deles se mostram de elevado cus- to/benefício, ineficazes ou mesmo de difícil aplica- ção em processos reais (Avelar et al., 2011). A de- tecção da baixa isolação, segundo (Brito et al., 2012), pode ser realizada através de testes como o teste de corrente contínua, o megômetro e o teste de impulso aplicado em motores (Surge Test), os quais Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 2954
Transcript of DETECÇÃO DE FALHA EM MOTORES DE INDUÇÃO … · Figura 1: Representação de um enrolamento...

1
DETECÇÃO DE FALHA EM MOTORES DE INDUÇÃO TRIFÁSICOS POR MEIO DE
INSTRUMENTO VIRTUAL
ANA PAULA L. SANTOS*, LÍVIA DE FÁTIMA SILVA MENDES*, MÁRCIO F. S. BARROSO*, LANE RABELO
BACCARINI*,
* Programa de Pós Graduação em Engenharia Elétrica, Universidade Federal de São João del-Rei
Praça Frei Orlando 170, Centro, 36307-352, São João del-Rei, MG, Brasil
E-mails:[email protected], [email protected],
[email protected], [email protected]
Abstract This paper presents the application of identified NARX models in the recursive parameter estimation of a Three
Phase Induction Motor (MIT) for the detection of electrical failure. The methodology is used to build a virtual instrument, which aims to adjust the variable gain model and detect the situation of initial short-circuit at MIT by the variation of the values of
model parameters.
Keywords Fault Detection; System Identification; Recursive Parameter Estimation; Three Phase Induction Motor.
Resumo Este artigo apresenta a aplicação de modelos NARX identificados na estimação recursiva de parâmetros de um Mo-
tor de Indução Trifásico (MIT) para a detecção de falha elétrica. A metodologia é utilizada na construção de um instrumento vir-
tual, o qual objetiva ajustar o ganho variável do modelo e detectar a situação de curto-circuito inicial no MIT através da variação nos valores dos parâmetros do modelo.
Palavras-chave Detecção de Falhas; Identificação de Sistemas; Estimação Recursiva de Parâmetros; Motor de Indução Trifá-
sico.
1 Introdução
Os motores de indução trifásicos e monofásicos
são as máquinas rotativas mais utilizadas atualmen-
te, sendo responsáveis por aproximadamente
do total de motores instalados (Massirer, 2007).
Suas características operacionais garantem confiabi-
lidade, robustez, simplicidade de construção e baixo
custo.
A importância dos motores de indução nas
plantas industriais torna a confiabilidade da opera-
ção destas máquinas um ponto crítico, devido ao
alto custo de uma parada no processo produtivo, os
quais podem representar de a do custo
total de muitos produtos (Avelar et al., 2011).
Uma vez que é economicamente inviável man-
ter máquinas sobressalentes, o monitoramento on-
line das máquinas de indução é importante para uma
operação segura e qualidade da produção, (Baccarini
et al., 2010).
A busca por técnicas de detecção e diagnóstico
de falhas receberam grande atenção da comunidade
científica nos últimos anos, destacando-se: Filippetti
et al., 1998; Thomson and Fenger, 2001; Boqiang et
al., 2003; Tan and Hong Huo, 2005; Tallam et al.,
2007; Bellini et al., 2008; Baccarini et al., 2010;
Martins et al., 2010; Pezzani et al., 2010; Razik et
al., 2010; Avelar et al., 2011; Brito et al., 2012.
Os objetivos de tais estudos são interpretar pre-
cocemente a falha incipiente e definir um correto
diagnóstico, para que não ocorra uma manutenção
não programada e uma parada no processo produti-
vo (Santos et al., 2012).
Os fatores que afetam o comportamento do mo-
tor podem ser agrupados em problemas de origem
magnética ou elétrica e problemas de origem mecâ-
nica (Baccarini et al., 2010). As falhas podem ser
internas: barras quebradas e/ou trincadas, rolamen-
tos danificados, curto circuito entre espiras, excen-
tricidade, desalinhamento, desbalanceamento de
massa; ou externas: sobrecarga mecânica, desequilí-
brio de fases, subtensão, sobretensão e presença de
harmônicos.
De acordo com (Thomson and Fenger, 2001),
os percentuais de falhas relacionados aos compo-
nentes dos motores de indução são de aproximada-
mente: 38% no estator, 10% no rotor, 40% nos ro-
lamentos e 12% nos demais.
O enrolamento de estator de uma máquina de
indução está sujeito às tensões induzidas por uma
variedade de fatores, que incluem picos térmicos de
sobrecarga, vibrações e picos de tensão. Sua deterio-
ração geralmente começa com uma falha entre espi-
ras envolvendo poucas voltas do enrolamento. No
entanto, se mantida, essa situação pode evoluir para
falta para a terra, o que resultaria em danos irrever-
síveis ao núcleo da máquina (Boqiang et al., 2003).
Atualmente, existem métodos diversificados pa-
ra detectar curto-circuito nas espiras do estator,
porém muitos deles se mostram de elevado cus-
to/benefício, ineficazes ou mesmo de difícil aplica-
ção em processos reais (Avelar et al., 2011). A de-
tecção da baixa isolação, segundo (Brito et al.,
2012), pode ser realizada através de testes como o
teste de corrente contínua, o megômetro e o teste de
impulso aplicado em motores (Surge Test), os quais
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2954

2
necessitam do desligamento do motor para serem
realizados.
Considerando os métodos não invasivos e que
não necessitam do desligamento do motor, sistemas
de diagnóstico de falhas têm sido desenvolvidos
com base em modelos determinísticos, neste contex-
to, modelos matemáticos de sistemas dinâmicos
permitem, dentre as diversas possibilidades, a detec-
ção de falhas no sistema (Troch, 1984). Tais mode-
los são capazes de considerar diferentes condições
de operação e tipos de falhas, (Bellini et al., 2008).
A maioria dos sistemas reais são não lineares
por natureza. Como objetiva-se obter um modelo
que represente os diversos pontos de operação do
MIT (Motor de Indução Trifásico), será utilizado o
modelo NARX (Nonlinear Autoregressive Model
with Exogenous Variables), o qual é um modelo
paramétrico não linear e discreto no tempo.
Contudo, os sistemas variantes no tempo, como
os sistemas com falha, constituem uma forte razão
para a utilização, na prática, de métodos recursivos
de identificação, porque é necessário que o algorit-
mo de estimação acompanhe a variação temporal
dos parâmetros (Aguirre et al., 2002).
Devido à necessidade de um diagnóstico não
invasivo e simples de ser aplicado, mesmo em plan-
tas industriais, surge a motivação deste trabalho. No
qual é proposto uma metodologia para a detecção de
curto-circuito com a aplicação de um instrumento
virtual, o qual detectará a situação de falha através
da variação nos valores dos parâmetros do modelo
dinâmico do MIT. A utilização de instrumento vir-
tual para detecção de falhas pode ser vista no traba-
lho de (Heredia and Hollero, 2010).
Para a aplicação da metodologia proposta é ne-
cessário, primeiramente, a obtenção de um modelo
que represente a operação normal do MIT. Os dados
para obtenção do modelo podem ser dados reais, se
houver disponibilidade para a realização dos testes,
ou dados simulados. Neste trabalho, os dados serão
obtidos através da simulação do modelo simétrico
do MIT, pois para a coleta de dados reais seria ne-
cessária a interrupção da operação do MIT, o que
numa planta industrial causaria parada na produção.
Posteriormente é implementada a estimação re-
cursiva dos parâmetros, na qual atualizam-se os
valores dos parâmetros e a curva estática a cada
período de amostragem, (Aguirre et al., 2002), o que
pode ser realizado on-line. Dessa maneira, o ganho
do modelo será variável de acordo com cada ponto
de operação do MIT e a variação nos valores dos
parâmetros ocorrerá apenas quando o MIT operar
com falha.
O restante do artigo está organizado como se-
gue. Na seção 2 encontram-se os conceitos prelimi-
nares. A seção 3 apresenta a metodologia utilizada
para a obtenção dos resultados. A análise e discus-
são dos resultados são tratadas pela seção 4. Final-
mente, na seção 5 é apresentada a conclusão e as
propostas para futuras pesquisas.
2 Conceitos Preliminares
2.1 Modelo Simétrico do MIT
O modelo dinâmico simétrico do motor de in-
dução trifásico é bem conhecido da literatura e per-
mite simular o comportamento do motor frente às
diversas condições de operação. Tal modelo utiliza a
Transformada Park para simplificar as equações da
máquina, sendo também conhecido como modelo
simétrico dq do MIT
Neste modelo, podem ser obtidas informações
sobre as tensões de alimentação, correntes de esta-
tor, torque e a velocidade desenvolvida pela máqui-
na em condições simétricas de operação, ou seja,
ausência de falhas.
2.2 Modelo Assimétrico do MIT
O modelo assimétrico proposto por (Baccarini
et al., 2010) possibilita a simulação das principais
falhas que podem ocorrer durante a operação do
MIT. Este modelo é derivado do modelo simétrico
da máquina e, para a simulação de curto circuito,
são adotados os procedimentos a seguir.
Na Figura 1 estão representados os enrolamen-
tos trifásicos concentrados de um motor de indução,
o qual possui uma falha de curto-circuito, sendo
o número de espiras em curto, a resistência
de falha e o número total de espiras por
fase.
Figura 1: Representação de um enrolamento trifásico do estator
de uma máquina de indução, na qual representa o número de
espiras em curto-circuito e a resistência de falha. Fonte: (Bac-
carini, 2005).
Considera-se o percentual de espiras em curto-
circuito da seguinte forma:
(1)
Dessa forma, a matriz de resistência do estator
depende do fator :
(2)
A estimativa utilizada para as indutâncias de
dispersão é dada como proposto por (Tallam et al.,
2000):
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2955

3
(3)
As tensões são dadas pelas equações a
seguir:
(4)
(5)
(6)
As equações para a determinação dos enlaces
de fluxo dos estator e rotor nos eixos dq0 são as
seguintes:
(7)
(8)
(9)
(10)
(11)
O conjugado em função das componentes de
eixo dq é dado por:
(12)
na qual: representa a corrente de falha, é o ân-
gulo de defasamento entre os eixos abc e dq, é a
indutância mútua, é a indutância de dispersão e
é o número de polos. Os subíndices r e s represen-
tam parâmetros do rotor e do estator, respectivamen-
te.
2.3 Identificação de Sistemas
Para se realizar a identificação de um sistema é
necessário que estejam disponíveis os dados de
entrada, , e os dados de saída, , desse sis-
tema.
O procedimento consiste em se obter um mo-
delo matemático que explique, da forma mais apro-
ximada possível, as características de interesse do
sistema.
As principais etapas num processo de identifi-
cação são (Aguirre, 2007):
Testes dinâmicos e coletas de dados;
Escolha da representação matemática a ser
usada;
Determinação da estrutura do modelo;
Estimação de Parâmetros;
Validação do modelo.
2.4 Modelo NARX
De acordo com (Billings, 1980), modelos
NARX descrevem sistemas não lineares em equa-
ções de diferenças, relacionando a entrada atual em
combinação das saídas e entradas passadas.
A representação NARX polinomial possui
pontos positivos, como o fato de permitir a incorpo-
ração de informações que se tem a priori do sistema
no modelo, como curva e ganho estático, por exem-
plo, (Martins et al., 2011). Tais informações podem
não estar contidas nos dados dinâmicos, a utilização
dessas informações podem acrescentar qualidade ao
modelo e maior representatividade.
Os modelos NARX polinomiais possuem pon-
tos fixos ou pontos de equilíbrio. Neste contexto, o
conceito de agrupamento de termos é adequado para
determinar o número de pontos fixos dos modelos,
sua localização e simetria. Essa informação será útil
na recuperação de características estáticas do siste-
ma original (Aguirre, 2007), o que será visto na
seção 2.6.2.
Em particular o modelo NARX polinomial pode
ser representado por:
(13)
em que: é a saída, é a entrada exógena e
é o sinal de ruído. representa o erro de
predição. , e são os atrasos máximos da
saída, entrada e da média móvel, respectivamente.
Neste trabalho, representa a função polinomial
não linear e não é considerado.
Os parâmetros do modelo são estimados por
Mínimos Quadrados Estendidos para garantir a não
polarização destes (Chen et al., 1989).
Para evitar mau condicionamento da matriz de
regressores é utilizado o critério de detecção de
estrutura denominado ERR (Error Reduction Ratio)
(Mendes and Billings, 2001). O número de regresso-
res é definido pelo Critério de Informação de Akai-
ke (Akaike, 1974).
2.5 Validação dinâmica do Modelo
A validação dinâmica consiste em verificar se
o modelo estimado é capaz de recuperar a dinâmica
do sistema em questão.
Para validar um modelo dinamicamente, pode-
se usar a simulação livre do mesmo, que consiste em
usar o conjunto de dados de validação do sistema e
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2956

4
as predições passadas da saída da matriz de regres-
sores. Além disso, será usada a análise da correlação
dos resíduos de identificação um passo a frente
(Aguirre, 2007).
Deseja-se que os resíduos de identificação se-
jam ruído branco, ou seja, que a sua autocorrelação
seja estatisticamente zero. Desta maneira, é possível
conjecturar que o modelo foi capaz de explicar os
dados dinâmicos sem incorporar dinâmicas espúrias.
2.6 Instrumento Virtual
Instrumentos virtuais são softwares que utili-
zam sinais medidos a fim de construir um sinal de
interesse, os quais são muito úteis na substituição de
sensores físicos e na detecção de falhas (Heredia e
Hollero, 2010). Tal procedimento torna a detecção
de falhas menos invasiva.
Neste trabalho, o instrumento virtual será cons-
truído através de um algoritmo recursivo, o qual
estima recursivamente os valores dos parâmetros e
do ganho variável do modelo a cada período de
amostragem.
2.6.1 Estimação Recursiva de Parâmetros
Enquanto os algoritmos de estimação em bate-
lada processam as amostras da massa de dados si-
multaneamente, obtendo uma única estimativa dos
parâmetros do modelo, os métodos de estimação
recursiva processam os dados experimentais se-
quencialmente, atualizando os parâmetros do mode-
lo a cada período de amostragem (Ljung, 1999).
Seja um sistema dado por , no qual e . De
acordo com (Aguirre, 2007), um modelo para este
sistema pode ser escrito da seguinte maneira:
, (14)
no qual: é formado na iteração
com informação disponível até a iteração ,
além disso, a estrutura do vetor de regressores é
previamente conhecida.
Na estimação recursiva, o vetor de parâmetros
no instante é expresso como uma combinação
linear do seu valor no instante anterior e do valor da
medição no instante .
Quando o sistema varia no tempo, as observa-
ções (dados) mais recentes precisam ser mais influ-
entes na estimação dos parâmetros, pois a informa-
ção que estes contêm está mais atualizada. Dessa
forma, é inserida no estimador uma razão entre
pesos consecutivos para os dados, o que é conhecido
como fator de esquecimento .
As equações utilizadas para implementar o es-
timador recursivo são como descritas em (Aguirre,
2007):
(15)
(16)
(17)
em que: é o ganho de Kalman, é a matriz de
covariância dos parâmetros, é o vetor de regres-
sores e é o vetor de parâmetros estimados.
2.6.2 Estimação de não linearidades estáticas
A estimação da característica estática não line-
ar será utilizada para ajustar o ganho do modelo do
MIT de acordo com o ponto de operação do motor,
ou seja, o ganho do modelo será variável.
Para um sistema variante no tempo, pode-se u-
tilizar a informação a priori sobre as não linearida-
des estáticas presentes no sistema original. Se a
estrutura escolhida para o modelo for adequada, é
possível estimar as características estáticas de inte-
resse utilizando os conceitos de agrupamentos de
termos, (Aguirre et al., 2002).
Os agrupamentos de termos são úteis para es-
crever expressões gerais de como o ganho do mode-
lo varia com o ponto de operação (Aguirre, 2007).
Para um modelo quadrático, o ponto fixo pode-
rá ser determinado pela equação (18):
(18)
em que: , , , e são os coeficientes de
agrupamentos de termos.
A equação (18) mostra que a determinação do
ponto fixo dependerá do valor da entrada do siste-
ma, caracterizando uma curva estática. Dessa forma,
a curva estática pode ser estimada a partir de um
modelo dinâmico.
3 Metodologia
3.1 Coleta de dados simulados para a Identificação
Os dados utilizados na identificação do modelo
nominal do MIT foram obtidos simulando-se o
modelo simétrico do MIT, considerando-se a difi-
culdade da realização de testes para coleta de dados
numa planta industrial.
O sistema foi simulado em um período de 4s,
com um intervalo de integração de . Os
dados foram decimados por .
A dizimação é realizada de forma que o período
de amostragem ( ) esteja no seguinte intervalo:
(19)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2957

5
em que: é a constante mínima
de tempo do sistema e, ainda, e são as auto-
correlações da saída, linear e não linear, respectiva-
mente.
A utilização da técnica descrita para a obtenção
do período de amostragem para os dados deste tra-
balho retornou que o valor mínimo do período de
amostragem deveria ser de
.
Como o período de integração utilizado nas simula-
ções foi de , a dizimação é dada por
, justificando, então, a escolha de 4.
Para realizar a identificação de um sistema, o
sinal de entrada deve ser tal que excite a dinâmica
da planta. Características dinâmicas que não forem
excitadas não aparecerão nos dados e não poderão
ser identificadas.
Portanto, a tensão de linha utilizada na simula-
ção do modelo simétrico do MIT foi um sinal PRBS
(sinal binário pseudo-aleatório), o qual não é um
sinal genuinamente aleatório, mas satisfaz à propri-
edade , a qual garante que a
matriz de covariância de seja diagonal e traz
vantagens numéricas na solução das equações.
A função de autocorrelação da tensão de fase
utilizada na simulação do modelo simétrico do MIT
é mostrada na Figura 2:
Figura 2: Autocorrelação da entrada . As faixas indicadas
são os intervalos de confiança de .
A Figura 2 indica que o sinal de excitação po-
de ser considerado aleatório com 95% de certeza.
Figura 3: Tensão de fase aplicada ao MIT e corrente de estator
resultante.
Os dados dinâmicos utilizados como entrada e
saída na modelagem foram tensão e corrente de
estator. O MIT recebe alimentação trifásica, no
entanto, toda análise apresentada é realizada utili-
zando-se as medições de uma única fase. Os dados
são mostrados na Figura 3.
3.2 Coleta de dados experimentais para a estimação
recursiva
A obtenção dos dados experimentais utilizados
na estimação recursiva de parâmetros foi realizada
através do monitoramento das componentes de
das correntes , e e das tensões de ali-
mentação , e , em condições de operação
normal e de curto-circuito, de um motor de indução
trifásico de , , , 4 polos e rotor do
tipo gaiola, o qual é um motor modificado para
possibilitar o teste de falhas elétricas.
A Figura 4 mostra a composição da bancada de
testes:
Figura 4: Bancada de testes experimentais.
Foram realizados sete ensaios para cada condi-
ção de operação considerada:
Motor operando em regime permanente,
corrente de linha . Após aproxi-
madamente do inicio da coleta dos da-
dos, um curto-circuito é fechado nas espi-
ras do estator, com cerca de das espiras
em curto-circuito;
Motor operando em regime permanente
com uma corrente de linha de .
Após aproximadamente do inicio da co-
leta dos dados, a carga é aumentada, tal que
a corrente de linha solicitada muda para
.
4 Resultados e Discussão
4.1 Estimação em Batelada
No processo de identificação através dos dados
de entrada e saída do MIT, e , representa-
dos na Figura 3, o número de termos do modelo foi
sugerido pelo Critério de Akaike, . Os atra-
sos do modelo foram encontrados por tentativa e são
, e .
O modelo NARX encontrado é representado na
equação (20):
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2958
6
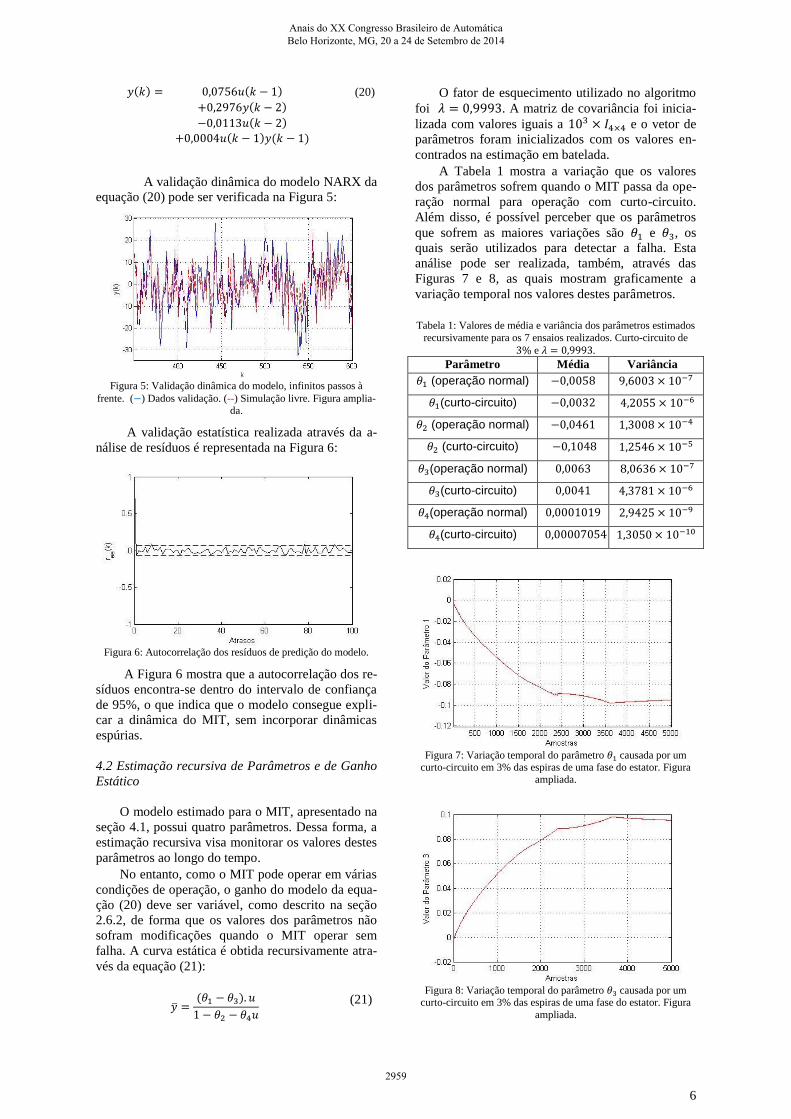
(20)
A validação dinâmica do modelo NARX da
equação (20) pode ser verificada na Figura 5:
Figura 5: Validação dinâmica do modelo, infinitos passos à
frente. ( ) Dados validação. (--) Simulação livre. Figura amplia-da.
A validação estatística realizada através da a-
nálise de resíduos é representada na Figura 6:
Figura 6: Autocorrelação dos resíduos de predição do modelo.
A Figura 6 mostra que a autocorrelação dos re-
síduos encontra-se dentro do intervalo de confiança
de 95%, o que indica que o modelo consegue expli-
car a dinâmica do MIT, sem incorporar dinâmicas
espúrias.
4.2 Estimação recursiva de Parâmetros e de Ganho
Estático
O modelo estimado para o MIT, apresentado na
seção 4.1, possui quatro parâmetros. Dessa forma, a
estimação recursiva visa monitorar os valores destes
parâmetros ao longo do tempo.
No entanto, como o MIT pode operar em várias
condições de operação, o ganho do modelo da equa-
ção (20) deve ser variável, como descrito na seção
2.6.2, de forma que os valores dos parâmetros não
sofram modificações quando o MIT operar sem
falha. A curva estática é obtida recursivamente atra-
vés da equação (21):
(21)
O fator de esquecimento utilizado no algoritmo
foi . A matriz de covariância foi inicia-
lizada com valores iguais a e o vetor de
parâmetros foram inicializados com os valores en-
contrados na estimação em batelada.
A Tabela 1 mostra a variação que os valores
dos parâmetros sofrem quando o MIT passa da ope-
ração normal para operação com curto-circuito.
Além disso, é possível perceber que os parâmetros
que sofrem as maiores variações são e , os
quais serão utilizados para detectar a falha. Esta
análise pode ser realizada, também, através das
Figuras 7 e 8, as quais mostram graficamente a
variação temporal nos valores destes parâmetros.
Tabela 1: Valores de média e variância dos parâmetros estimados
recursivamente para os 7 ensaios realizados. Curto-circuito de
e .
Parâmetro Média Variância
(operação normal)
(curto-circuito)
(operação normal)
(curto-circuito)
(operação normal)
(curto-circuito)
(operação normal)
(curto-circuito)
Figura 7: Variação temporal do parâmetro causada por um
curto-circuito em 3% das espiras de uma fase do estator. Figura ampliada.
Figura 8: Variação temporal do parâmetro causada por um curto-circuito em 3% das espiras de uma fase do estator. Figura
ampliada.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2959
7
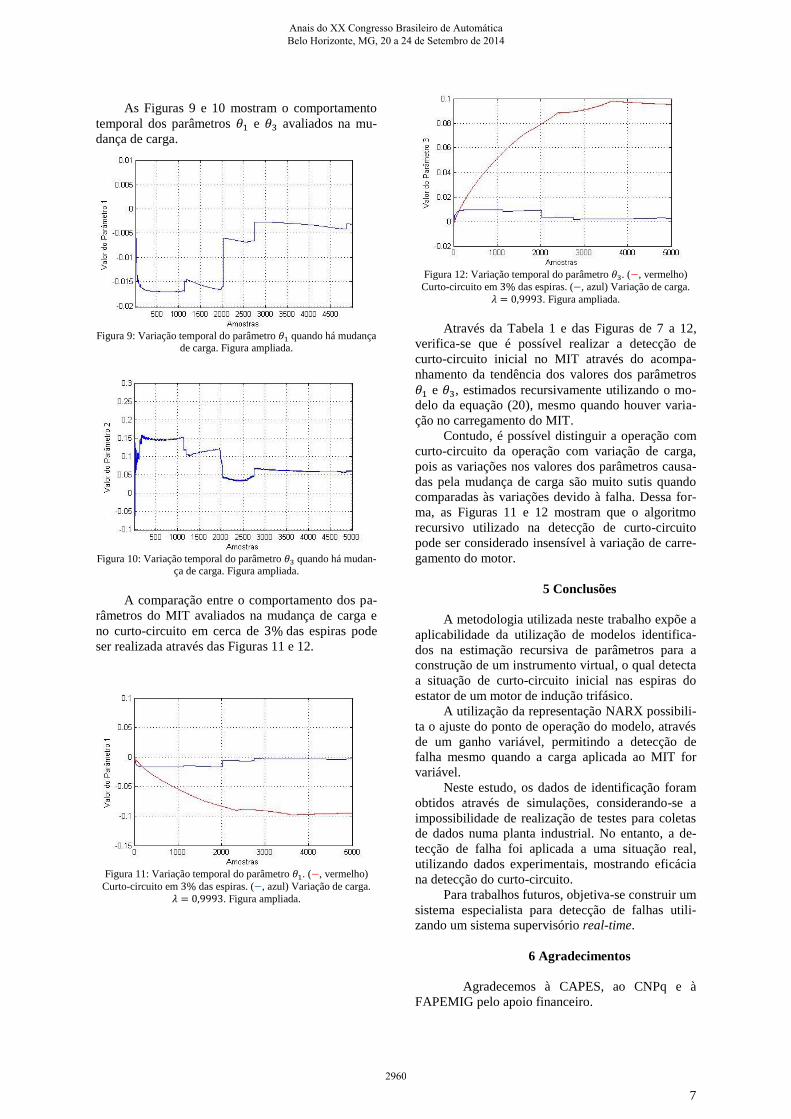
As Figuras 9 e 10 mostram o comportamento
temporal dos parâmetros e avaliados na mu-
dança de carga.
Figura 9: Variação temporal do parâmetro quando há mudança de carga. Figura ampliada.
Figura 10: Variação temporal do parâmetro quando há mudan-
ça de carga. Figura ampliada.
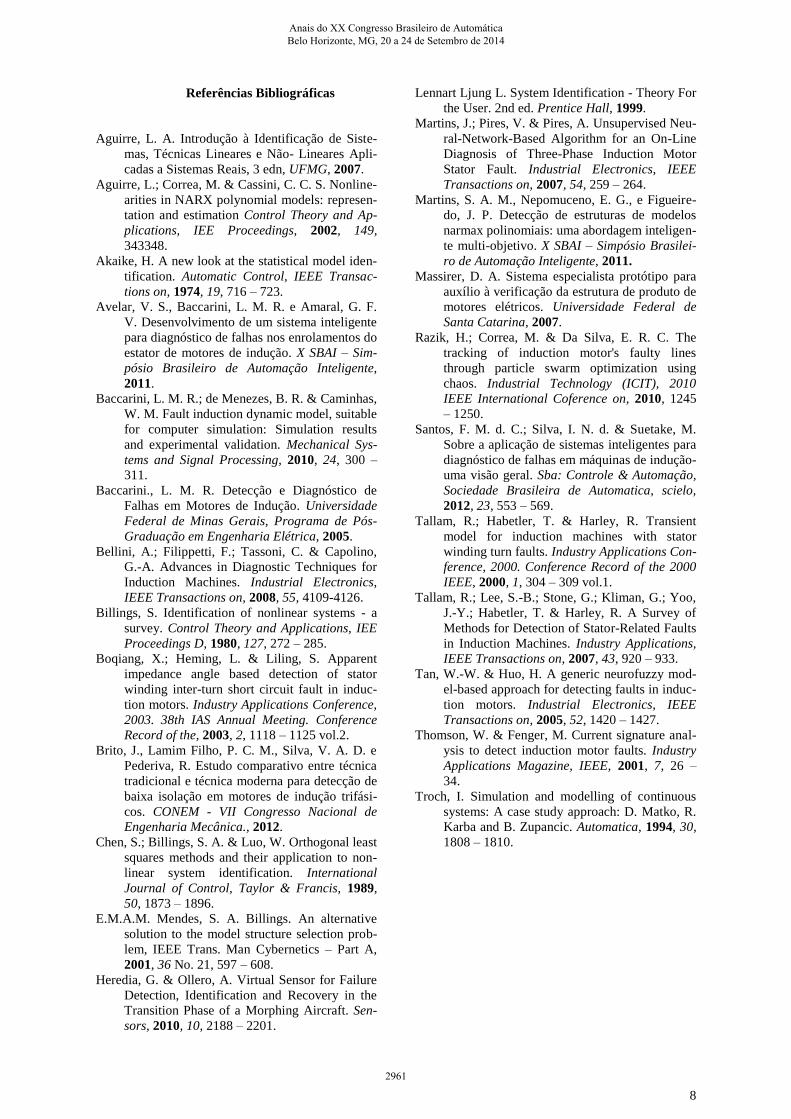
A comparação entre o comportamento dos pa-
râmetros do MIT avaliados na mudança de carga e
no curto-circuito em cerca de das espiras pode
ser realizada através das Figuras 11 e 12.
Figura 11: Variação temporal do parâmetro . ( , vermelho)
Curto-circuito em das espiras. ( , azul) Variação de carga.
. Figura ampliada.
Figura 12: Variação temporal do parâmetro . ( , vermelho)
Curto-circuito em das espiras. ( , azul) Variação de carga.
. Figura ampliada.
Através da Tabela 1 e das Figuras de 7 a 12,
verifica-se que é possível realizar a detecção de
curto-circuito inicial no MIT através do acompa-
nhamento da tendência dos valores dos parâmetros
e , estimados recursivamente utilizando o mo-
delo da equação (20), mesmo quando houver varia-
ção no carregamento do MIT.
Contudo, é possível distinguir a operação com
curto-circuito da operação com variação de carga,
pois as variações nos valores dos parâmetros causa-
das pela mudança de carga são muito sutis quando
comparadas às variações devido à falha. Dessa for-
ma, as Figuras 11 e 12 mostram que o algoritmo
recursivo utilizado na detecção de curto-circuito
pode ser considerado insensível à variação de carre-
gamento do motor.
5 Conclusões
A metodologia utilizada neste trabalho expõe a
aplicabilidade da utilização de modelos identifica-
dos na estimação recursiva de parâmetros para a
construção de um instrumento virtual, o qual detecta
a situação de curto-circuito inicial nas espiras do
estator de um motor de indução trifásico.
A utilização da representação NARX possibili-
ta o ajuste do ponto de operação do modelo, através
de um ganho variável, permitindo a detecção de
falha mesmo quando a carga aplicada ao MIT for
variável.
Neste estudo, os dados de identificação foram
obtidos através de simulações, considerando-se a
impossibilidade de realização de testes para coletas
de dados numa planta industrial. No entanto, a de-
tecção de falha foi aplicada a uma situação real,
utilizando dados experimentais, mostrando eficácia
na detecção do curto-circuito.
Para trabalhos futuros, objetiva-se construir um
sistema especialista para detecção de falhas utili-
zando um sistema supervisório real-time.
6 Agradecimentos
Agradecemos à CAPES, ao CNPq e à
FAPEMIG pelo apoio financeiro.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2960
8
Referências Bibliográficas
Aguirre, L. A. Introdução à Identificação de Siste-
mas, Técnicas Lineares e Não- Lineares Apli-
cadas a Sistemas Reais, 3 edn, UFMG, 2007.
Aguirre, L.; Correa, M. & Cassini, C. C. S. Nonline-
arities in NARX polynomial models: represen-
tation and estimation Control Theory and Ap-
plications, IEE Proceedings, 2002, 149,
343348.
Akaike, H. A new look at the statistical model iden-
tification. Automatic Control, IEEE Transac-
tions on, 1974, 19, 716 – 723.
Avelar, V. S., Baccarini, L. M. R. e Amaral, G. F.
V. Desenvolvimento de um sistema inteligente
para diagnóstico de falhas nos enrolamentos do
estator de motores de indução. X SBAI – Sim-
pósio Brasileiro de Automação Inteligente,
2011.
Baccarini, L. M. R.; de Menezes, B. R. & Caminhas,
W. M. Fault induction dynamic model, suitable
for computer simulation: Simulation results
and experimental validation. Mechanical Sys-
tems and Signal Processing, 2010, 24, 300 –
311.
Baccarini., L. M. R. Detecção e Diagnóstico de
Falhas em Motores de Indução. Universidade
Federal de Minas Gerais, Programa de Pós-
Graduação em Engenharia Elétrica, 2005.
Bellini, A.; Filippetti, F.; Tassoni, C. & Capolino,
G.-A. Advances in Diagnostic Techniques for
Induction Machines. Industrial Electronics,
IEEE Transactions on, 2008, 55, 4109-4126.
Billings, S. Identification of nonlinear systems - a
survey. Control Theory and Applications, IEE
Proceedings D, 1980, 127, 272 – 285.
Boqiang, X.; Heming, L. & Liling, S. Apparent
impedance angle based detection of stator
winding inter-turn short circuit fault in induc-
tion motors. Industry Applications Conference,
2003. 38th IAS Annual Meeting. Conference
Record of the, 2003, 2, 1118 – 1125 vol.2.
Brito, J., Lamim Filho, P. C. M., Silva, V. A. D. e
Pederiva, R. Estudo comparativo entre técnica
tradicional e técnica moderna para detecção de
baixa isolação em motores de indução trifási-
cos. CONEM - VII Congresso Nacional de
Engenharia Mecânica., 2012.
Chen, S.; Billings, S. A. & Luo, W. Orthogonal least
squares methods and their application to non-
linear system identification. International
Journal of Control, Taylor & Francis, 1989,
50, 1873 – 1896.
E.M.A.M. Mendes, S. A. Billings. An alternative
solution to the model structure selection prob-
lem, IEEE Trans. Man Cybernetics – Part A,
2001, 36 No. 21, 597 – 608.
Heredia, G. & Ollero, A. Virtual Sensor for Failure
Detection, Identification and Recovery in the
Transition Phase of a Morphing Aircraft. Sen-
sors, 2010, 10, 2188 – 2201.
Lennart Ljung L. System Identification - Theory For
the User. 2nd ed. Prentice Hall, 1999.
Martins, J.; Pires, V. & Pires, A. Unsupervised Neu-
ral-Network-Based Algorithm for an On-Line
Diagnosis of Three-Phase Induction Motor
Stator Fault. Industrial Electronics, IEEE
Transactions on, 2007, 54, 259 – 264.
Martins, S. A. M., Nepomuceno, E. G., e Figueire-
do, J. P. Detecção de estruturas de modelos
narmax polinomiais: uma abordagem inteligen-
te multi-objetivo. X SBAI – Simpósio Brasilei-
ro de Automação Inteligente, 2011. Massirer, D. A. Sistema especialista protótipo para
auxílio à verificação da estrutura de produto de
motores elétricos. Universidade Federal de
Santa Catarina, 2007.
Razik, H.; Correa, M. & Da Silva, E. R. C. The
tracking of induction motor's faulty lines
through particle swarm optimization using
chaos. Industrial Technology (ICIT), 2010
IEEE International Coference on, 2010, 1245
– 1250.
Santos, F. M. d. C.; Silva, I. N. d. & Suetake, M.
Sobre a aplicação de sistemas inteligentes para
diagnóstico de falhas em máquinas de indução-
uma visão geral. Sba: Controle & Automação,
Sociedade Brasileira de Automatica, scielo,
2012, 23, 553 – 569.
Tallam, R.; Habetler, T. & Harley, R. Transient
model for induction machines with stator
winding turn faults. Industry Applications Con-
ference, 2000. Conference Record of the 2000
IEEE, 2000, 1, 304 – 309 vol.1.
Tallam, R.; Lee, S.-B.; Stone, G.; Kliman, G.; Yoo,
J.-Y.; Habetler, T. & Harley, R. A Survey of
Methods for Detection of Stator-Related Faults
in Induction Machines. Industry Applications,
IEEE Transactions on, 2007, 43, 920 – 933.
Tan, W.-W. & Huo, H. A generic neurofuzzy mod-
el-based approach for detecting faults in induc-
tion motors. Industrial Electronics, IEEE
Transactions on, 2005, 52, 1420 – 1427.
Thomson, W. & Fenger, M. Current signature anal-
ysis to detect induction motor faults. Industry
Applications Magazine, IEEE, 2001, 7, 26 –
34. Troch, I. Simulation and modelling of continuous
systems: A case study approach: D. Matko, R.
Karba and B. Zupancic. Automatica, 1994, 30,
1808 – 1810.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2961