DEFINIÇÃO DE ROBÔ - joinville.udesc.br · DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da...
20
Transcript of DEFINIÇÃO DE ROBÔ - joinville.udesc.br · DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da...
Prof. Silas do Amaral - UDESC 2
Robotic Industries Association - RIA
Robô Industrial: É um manipulador multifuncional reprogramável, projetado para movimentar materiais, partes, ferramentas ou peças especiais, através de diversosmovimentos programados, para o desempenho de uma variedade de tarefas.
Norma ISO 10218
Robô Industrial: É uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente, reprogramável, multifuncional, que pode ter base fixaou móvel para utilização em aplicações de automaçãoindustrial.
DEFINIÇÃO DE ROBÔ
A palavra robô deriva-se da palavra eslava robota, que significa trabalhadorforçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek.
Prof. Silas do Amaral - UDESC 3
Calor excessivo
Ruído elevado e constante
Gases tóxicos e ou poeira
Risco de contaminação química ou radioativa
Esforço físico extremo e continuado
Processos sem interrupção, longos e contínuos
Tarefas que exigem vários movimentos simultâneos
Operações que requerem grande precisão na sua execução
Necessidade de uniformidade na produção
Trabalhos monótonos, repetitivos, “chatos”
Risco de morte
QUANDO USAR ROBÔS
Quando for necessário substituir o ser humano em tarefas que ele não pode realizar, em função de suas limitações físicas, ou por envolverem condições desagradáveis ou extremas, caracterizadas por:
Prof. Silas do Amaral - UDESC 4
ROBÔ X SER HUMANO
O O RobôRobô …… nnão se cansa
… não necessita de salário… não tira férias e nem licença maternidade… pode manter uma qualidade uniforme na produção… não necessita de condições ambientais especiais… não corre o risco de morrer… possui precisão em seus movimentos
O Ser O Ser humanohumano … possui capacidade de aprender e de criar
… aprende com a experiência… pode realizar movimentos complexos… possui memória superior a dos robôs… realiza simultaneamente diversas tarefas… seus sensores ainda não foram superados… toma decisões frente a situações inesperadas
Prof. Silas do Amaral - UDESC 5
LIMITAÇÕES DE CUSTO
O maior fator que impede a adoção em massa de robôs nasindústrias é seu alto custo.
O tempo que se leva para se recuperar o investimento em um robô depende dos custos de compra, instalação e manutenção, além do treinamento e qualificação de pessoal.
Este tempo não é fixo, depende da fábrica ou indústria onde o robô será instalado e de sua aplicação.
Para avaliar o custo, devem ser considerados os seguintes fatores:
Número de empregados substituídos pelo robôNúmero de turnos por diaProdutividade comparada a seu custoCusto de projeto e manutençãoCusto dos equipamentos periféricosEnfim: a sua relação custo / benefício
Prof. Silas do Amaral - UDESC 6
Tipo A: Manipulador com controle manual ou telecomando
Tipo B: Manipulador automático com ciclos pré-ajustadosRegulação com chaves fim-de-cursoControle por CLP
Tipo C: Robô programável com trajetória contínuaou ponto a ponto
Não adquire conhecimentos do ambiente
Tipo D: Robô capaz de adquirir dados do ambienteReadapta sua tarefa em função deles
CLASSIFICAÇÃO DOS ROBÔ MANIPULADORES

Prof. Silas do Amaral - UDESC 7
Manipulador MecânicoUma cadeia cinemática aberta de elos conectados através juntas
Elos: elementos rígidos de aço ou alumínioJuntas ou Articulações: conectam dois elos e são responsáveis pelo movimento rotacional ou translacional entre elesSistema de transmissão: transmite potência mecânica aos elos; engrenagens, correias, fusos, redutores harmônicos, etc.
Elemento Terminal ou Efetuador FinalElemento de ligação entre o robô e o meio que o cerca
Tipo Garra: pega objeto transporta soltaTipo Ferramenta: realiza um trabalho sobre uma peça
Sensores: posição, velocidade, força, torque, visão, etc.
ELEMENTOS DE UM ROBÔ INDUSTRIAL
Prof. Silas do Amaral - UDESC 8
AtuadoresResponsáveis pela produção de potência mecânica
Hidráulicos: elevada potência mecânicaPneumáticos: movimento ponto a pontoElétricos: os mais usados (motores cc, ca e de passo)
Unidade de ControleRealiza todo o comando do sistema robótico através de computador,
CLP, placas, usando informações de sensores
Unidade de PotênciaFornece energia aos atuadores
ELEMENTOS DE UM ROBÔ INDUSTRIAL
Prof. Silas do Amaral - UDESC 9
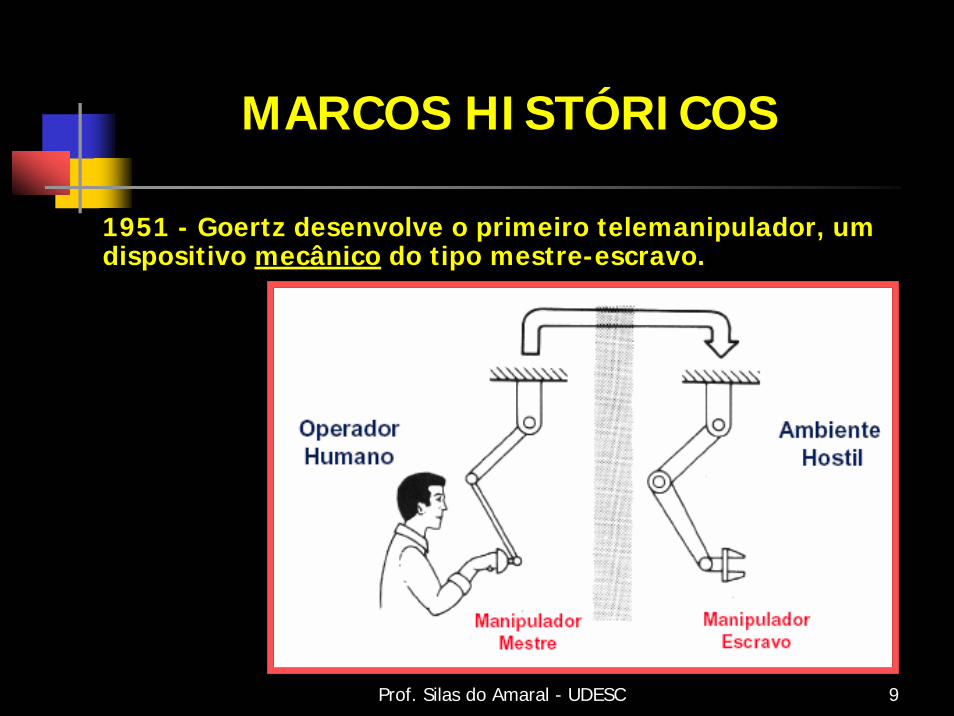
MARCOS HISTÓRICOS
1951 - Goertz desenvolve o primeiro telemanipulador, um dispositivo mecânico do tipo mestre-escravo.

Prof. Silas do Amaral - UDESC 10
1954 - Devol desenvolve o disposistivo programmed articulated transferdevice, para executar uma seqüência de operações programadas.
1958 - Mosher da GE desenvolve um dispositivo teleoperado, denominadoHandyMan.
MARCOS HISTÓRICOS

Prof. Silas do Amaral - UDESC 11
FIM DOSÉCULO
XX
MANIPULADORESMESTRE-ESCRAVO
Prof. Silas do Amaral - UDESC 12
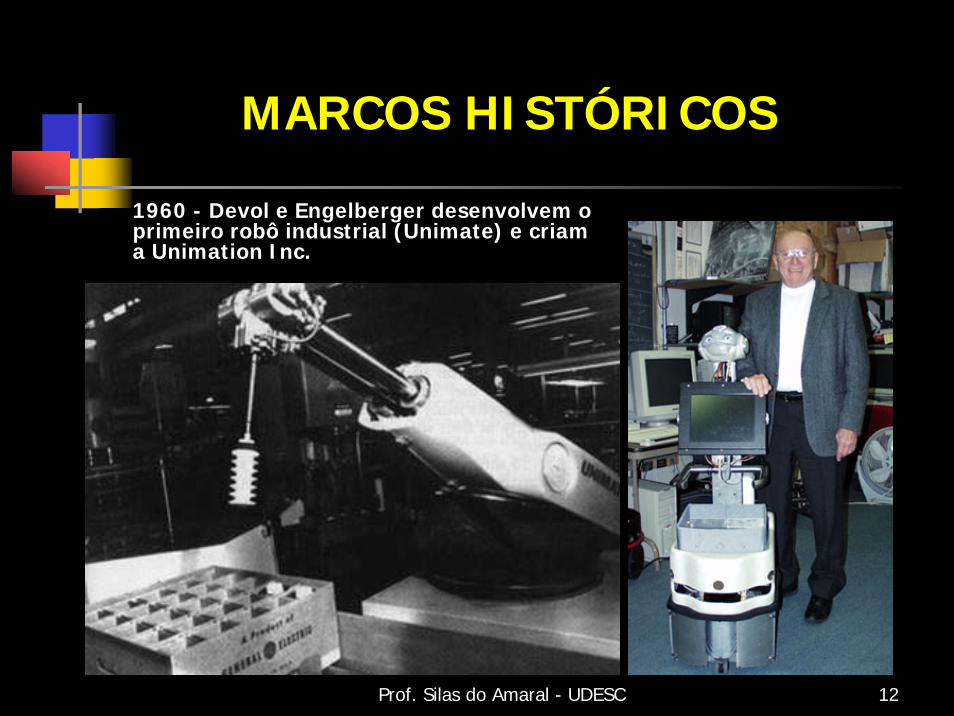
1960 - Devol e Engelberger desenvolvem o primeiro robô industrial (Unimate) e criama Unimation Inc.
MARCOS HISTÓRICOS
Prof. Silas do Amaral - UDESC 13
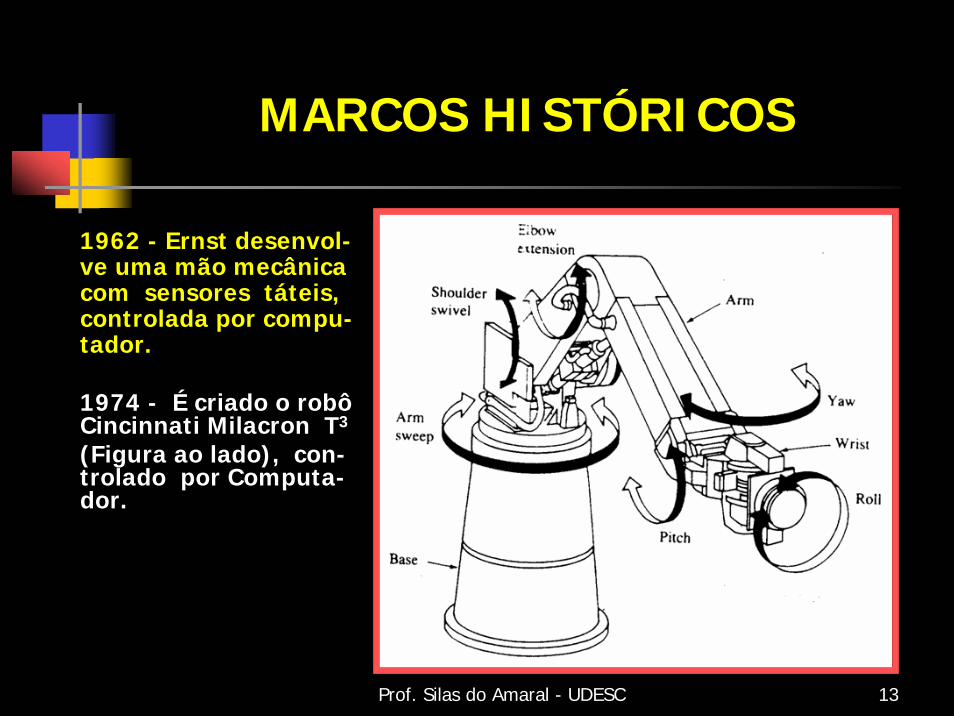
MARCOS HISTÓRICOS
1962 - Ernst desenvol-ve uma mão mecânicacom sensores táteis, controlada por compu-tador.
1974 - É criado o robôCincinnati Milacron T3
(Figura ao lado), con-trolado por Computa-dor.
Prof. Silas do Amaral - UDESC 14
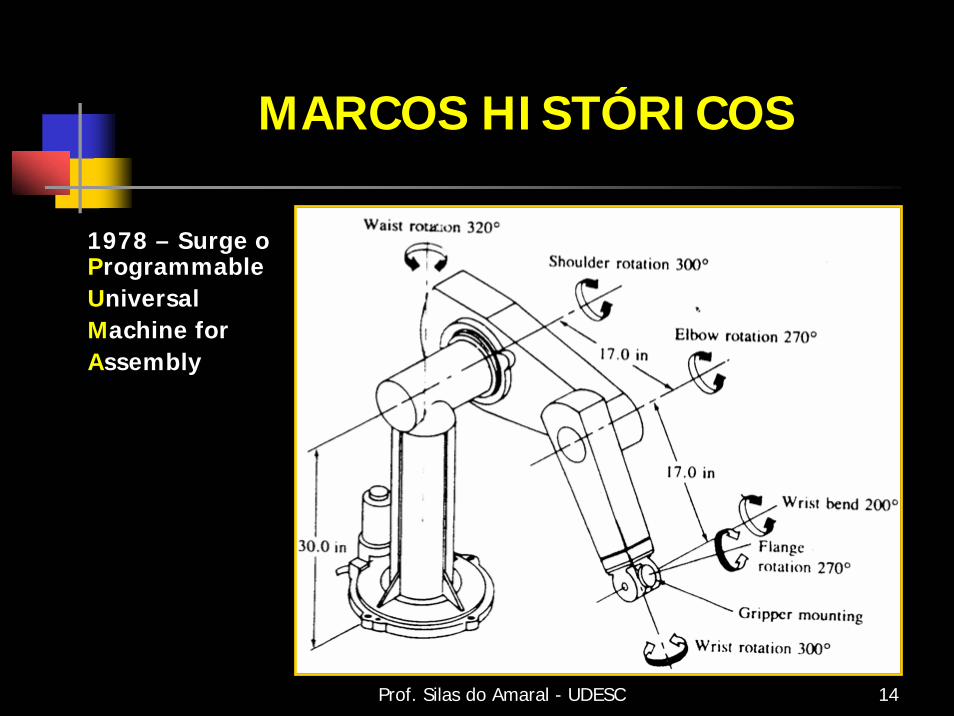
MARCOS HISTÓRICOS
1978 – Surge o ProgrammableUniversalMachine forAssembly

Prof. Silas do Amaral - UDESC 15
MARCOS HISTÓRICOS
1979 – A Universidade Yamanishi no Japão desenvolve o SCARA (Selective Compliant Assembly Robot Arm)

Prof. Silas do Amaral - UDESC 16
Serviços de: prensas,máquinas-ferramentamáquinas de moldar, fornos, forjas e fundições
Transferência de peças para montagensMicromanipulação de circuitosManipulação de micromecânicaMontagem e inserção de peçasManipulação de cargas pesadasSolda a arco ou a pontoPosicionamento de peças para soldaManipulação com controle visualSolda com controle visual
APLICAÇÕES INDUSTRIAIS
Controle de qualidadeAcabamento de peçasRebitagemPaletizaçãoPintura
Prof. Silas do Amaral - UDESC 17
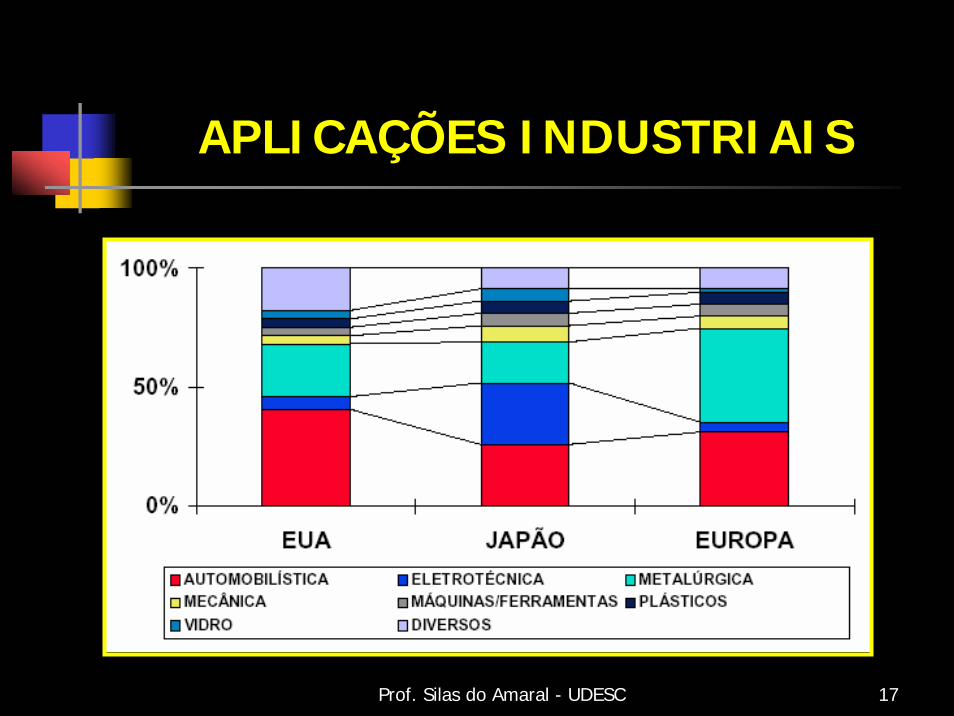
APLICAÇÕES INDUSTRIAIS
Prof. Silas do Amaral - UDESC 18
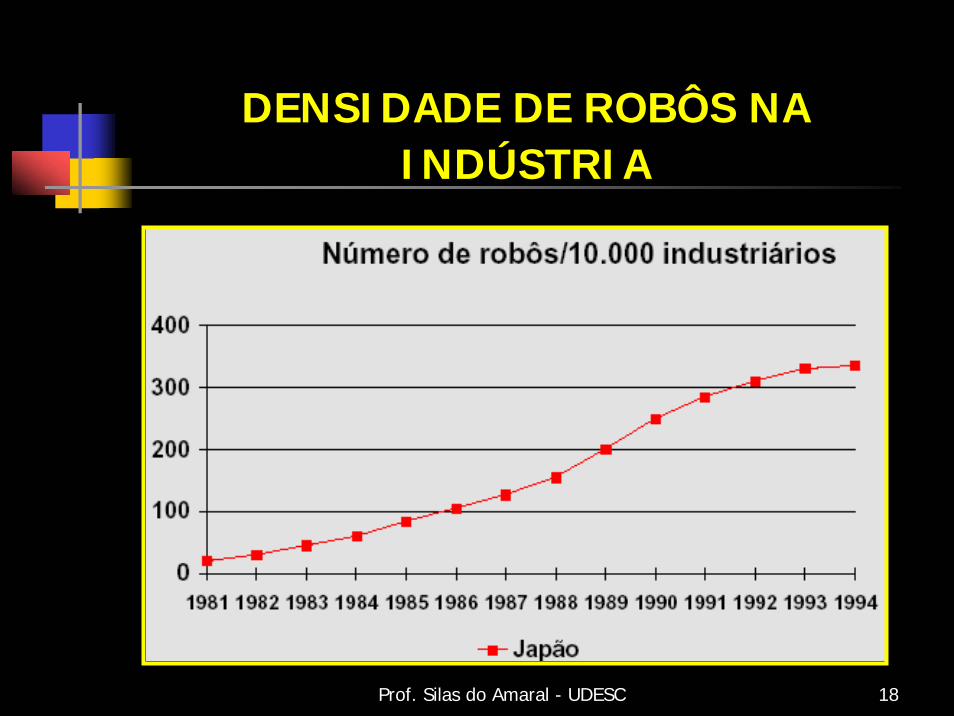
DENSIDADE DE ROBÔS NA INDÚSTRIA
Prof. Silas do Amaral - UDESC 19
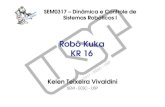
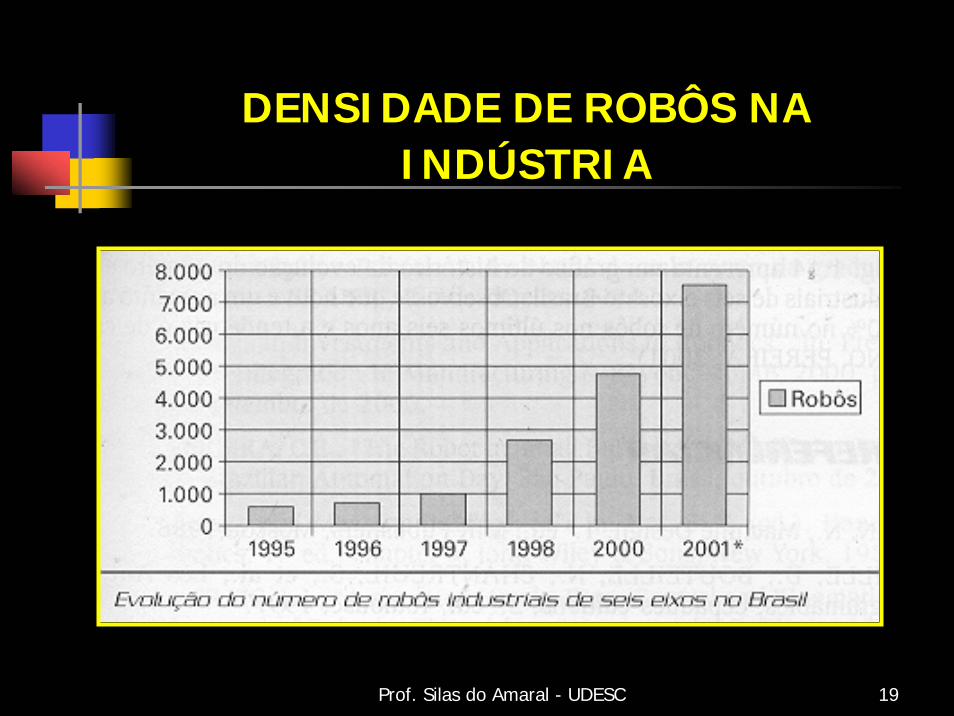
DENSIDADE DE ROBÔS NA INDÚSTRIA
Prof. Silas do Amaral - UDESC 20
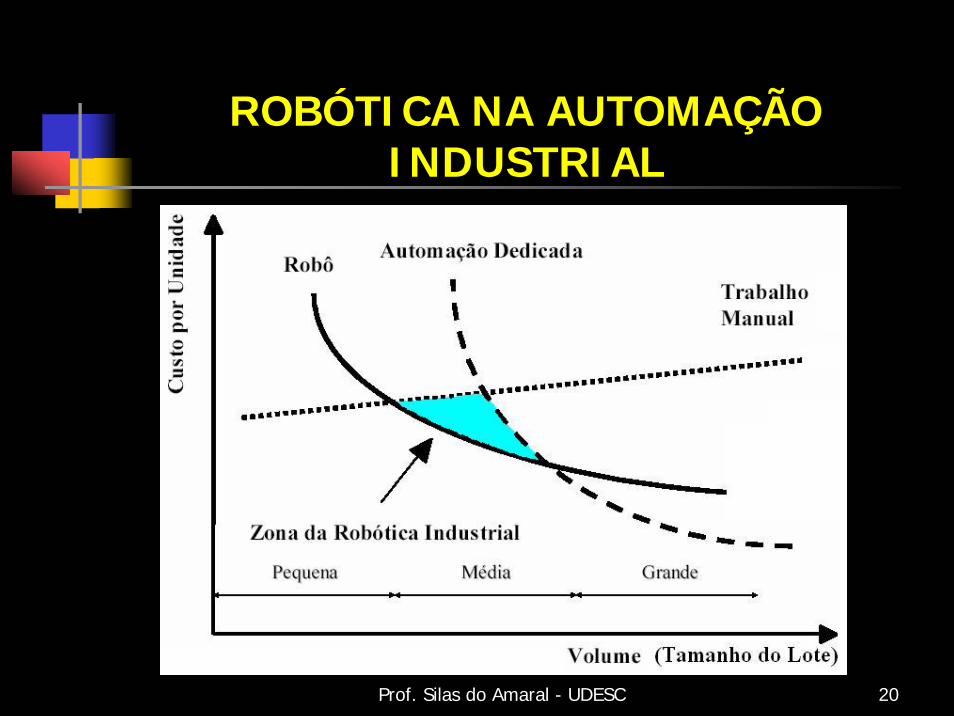
ROBÓTICA NA AUTOMAÇÃO INDUSTRIAL