Controle e Determinação de Orbita e...
33
Determinação e Controle de Orbita e Atitude 20:50 CTEE 1
Transcript of Controle e Determinação de Orbita e...
Determinação e Controle de Orbita e Atitude
20:50CTEE 1
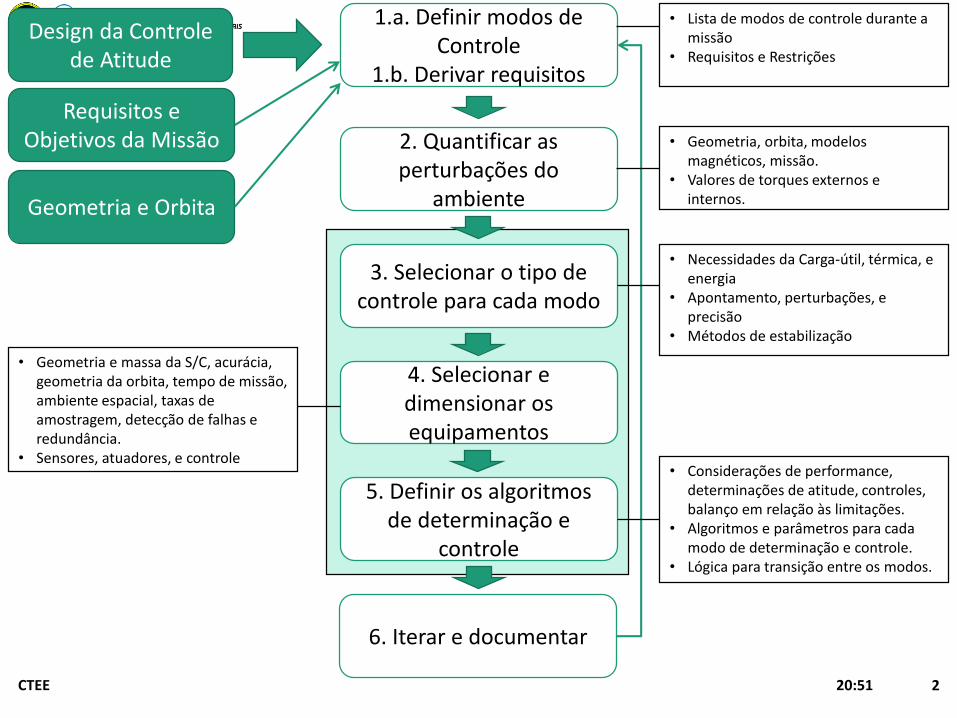
1.a. Definir modos de Controle
1.b. Derivar requisitos
Requisitos e Objetivos da Missão
Geometria e Orbita
Design da Controle de Atitude
2. Quantificar as perturbações do
ambiente
• Lista de modos de controle durante a missão
• Requisitos e Restrições
3. Selecionar o tipo de controle para cada modo
4. Selecionar e dimensionar os equipamentos
5. Definir os algoritmos de determinação e
controle
6. Iterar e documentar
• Geometria, orbita, modelos magnéticos, missão.
• Valores de torques externos e internos.
• Necessidades da Carga-útil, térmica, e energia
• Apontamento, perturbações, e precisão
• Métodos de estabilização
• Geometria e massa da S/C, acurácia, geometria da orbita, tempo de missão, ambiente espacial, taxas de amostragem, detecção de falhas e redundância.
• Sensores, atuadores, e controle• Considerações de performance,
determinações de atitude, controles, balanço em relação às limitações.
• Algoritmos e parâmetros para cada modo de determinação e controle.
• Lógica para transição entre os modos.
20:51CTEE 2
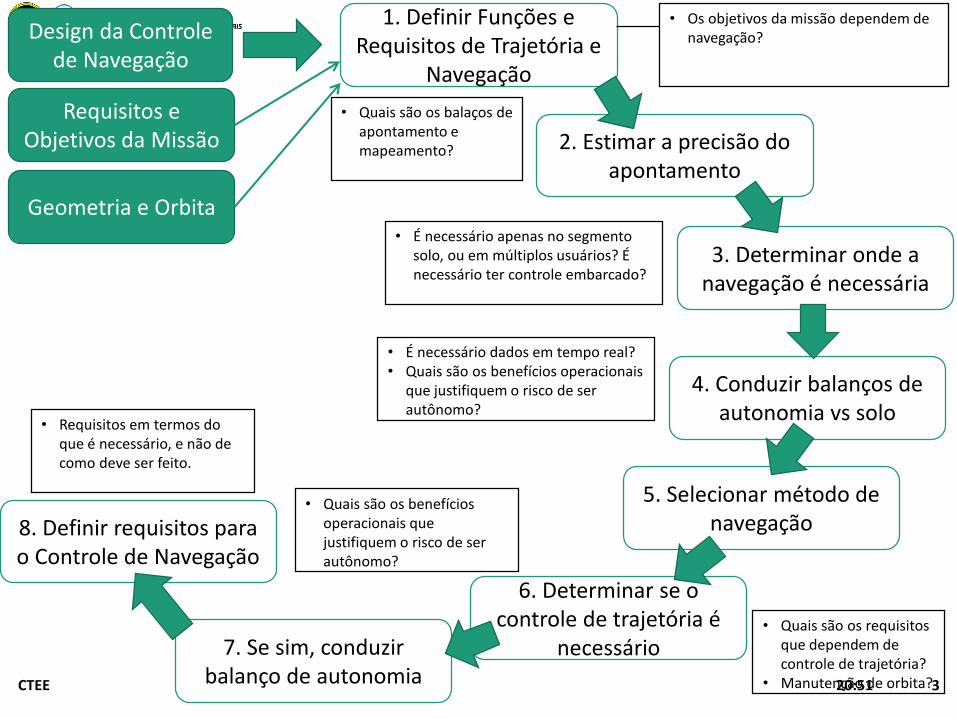
1. Definir Funções e Requisitos de Trajetória e
Navegação
Requisitos e Objetivos da Missão
Geometria e Orbita
Design da Controle de Navegação
2. Estimar a precisão do apontamento
• Os objetivos da missão dependem de navegação?
3. Determinar onde a navegação é necessária
4. Conduzir balanços de autonomia vs solo
5. Selecionar método de navegação
6. Determinar se o controle de trajetória é
necessário7. Se sim, conduzir balanço de autonomia
8. Definir requisitos para o Controle de Navegação
• Quais são os balaços de apontamento e mapeamento?
• É necessário apenas no segmento solo, ou em múltiplos usuários? É necessário ter controle embarcado?
• É necessário dados em tempo real?• Quais são os benefícios operacionais
que justifiquem o risco de ser autônomo?
• Quais são os requisitos que dependem de controle de trajetória?
• Manutenção de orbita?
• Quais são os benefícios operacionais que justifiquem o risco de ser autônomo?
• Requisitos em termos do que é necessário, e não de como deve ser feito.
20:51CTEE 3

Controle
Sistema A
Sistema B
-x(t) y(t)
Sinal de Referência Saída medida
20:51CTEE 4
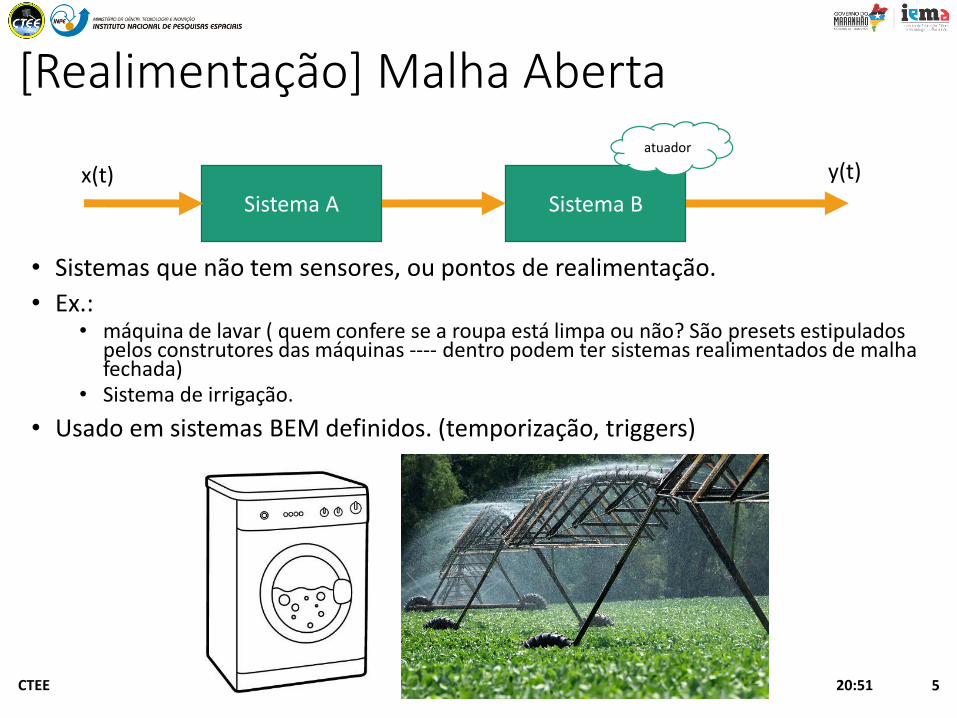
[Realimentação] Malha Aberta
• Sistemas que não tem sensores, ou pontos de realimentação.
• Ex.: • máquina de lavar ( quem confere se a roupa está limpa ou não? São presets estipulados
pelos construtores das máquinas ---- dentro podem ter sistemas realimentados de malha fechada)
• Sistema de irrigação.
• Usado em sistemas BEM definidos. (temporização, triggers)
Sistema BSistema Ax(t) y(t)
atuador
20:51CTEE 5

[Realimentação] Malha Fechada
• Sistemas com sensores, pontos de observação, e sinais que retroalimentam com dados para ajuste do funcionamento.
• Ex.: controles de torque, movimento, níveis químicos, biológicos, etc..
• Usado em sistemas que precisam de ajustes. (sensores, “inteligência”, atuadores)
• Exemplo clássico: Controle (mecânico) de velocidade de uma caldeira a vapor.
Sistema A
Sistema B
-x(t) y(t)
revolução industrial no século XVIII
sensores
atuador
20:51CTEE 6
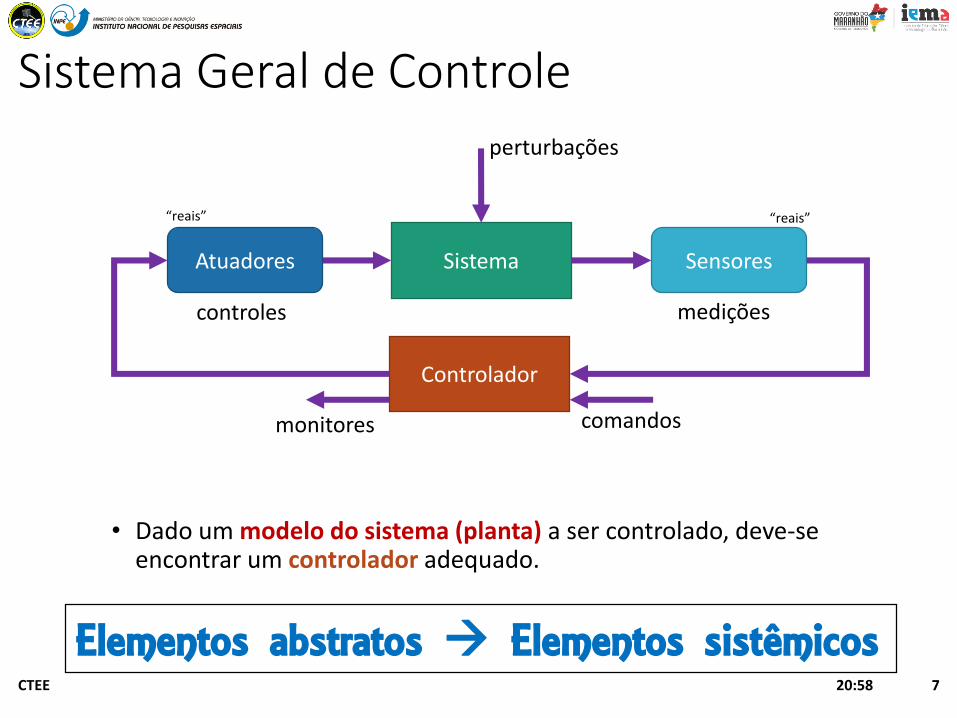
Sistema Geral de Controle
• Dado um modelo do sistema (planta) a ser controlado, deve-se encontrar um controlador adequado.
Sistema
Controlador
SensoresAtuadores
perturbações
monitores comandos
controles medições
“reais” “reais”
Elementos abstratos Elementos sistêmicos20:58CTEE 7
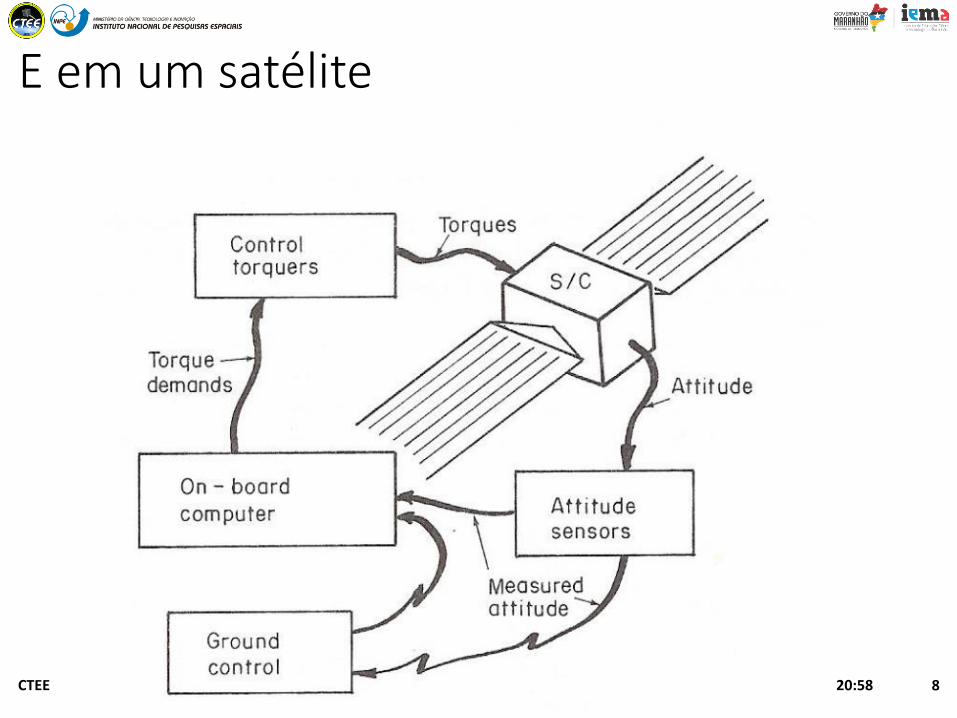
E em um satélite
20:58CTEE 8

3 Eixos Spin
Tipos de Estabilização
20:58CTEE 9

Magnetômetro• A magnetometer can also be
used by satellites like GOESto measure both the magnitude and direction of the magnetic field of a planet or moon.
20:58CTEE 10
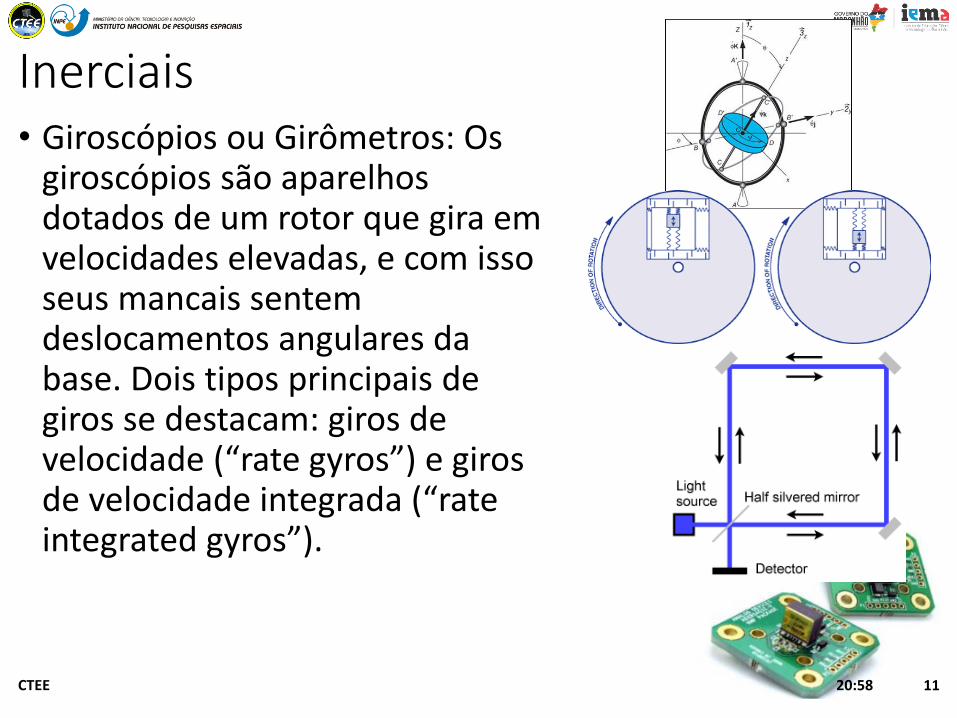
Inerciais• Giroscópios ou Girômetros: Os
giroscópios são aparelhos dotados de um rotor que gira em velocidades elevadas, e com isso seus mancais sentem deslocamentos angulares da base. Dois tipos principais de giros se destacam: giros de velocidade (“rate gyros”) e giros de velocidade integrada (“rate integrated gyros”).
20:58CTEE 11
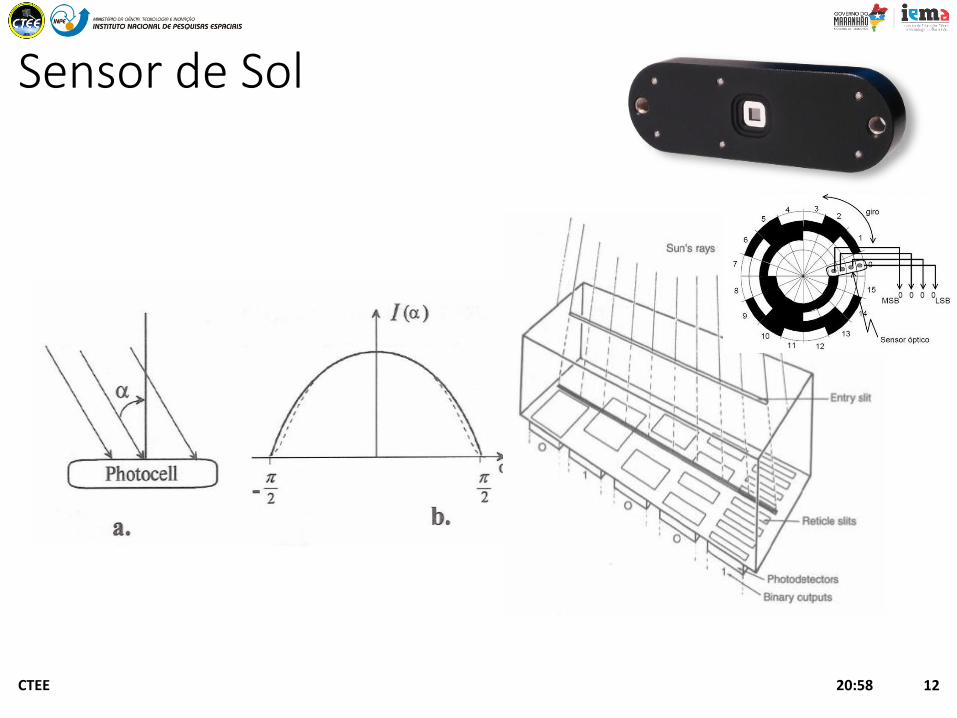
Sensor de Sol
20:58CTEE 12

Sensor de Horizonte (Terra)
* IR refletido 20:58CTEE 13
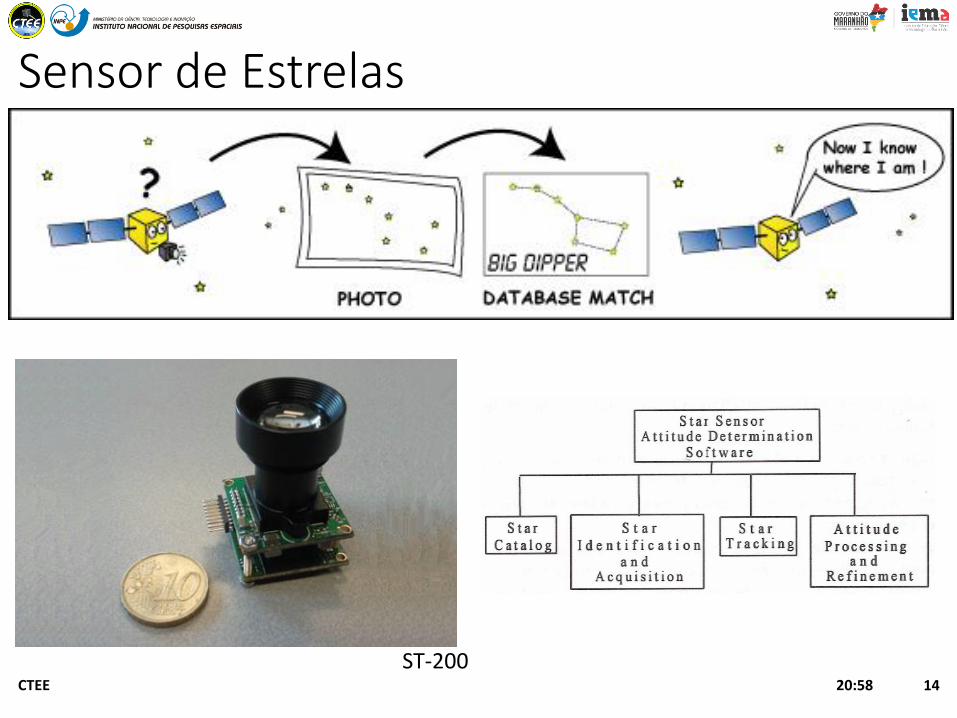
Sensor de Estrelas
ST-20020:58CTEE 14

Bobina de Torque Magnético• Por serem leves, de custo reduzido e
por consumirem energia renovável(energia elétrica provinda dos painéissolares), são largamente utilizadas emsatélites artificiais. As bobinas, devidoà interação do campo magnéticogerado por elas com o campo magnético da Terra, geram um torque.
20:58CTEE 15
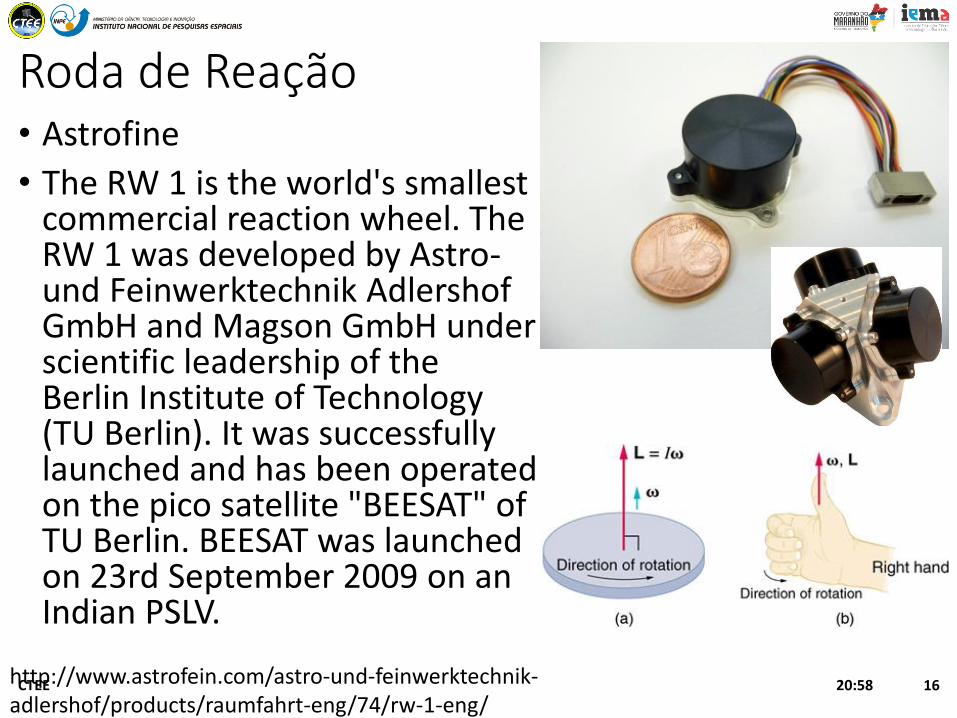
Roda de Reação• Astrofine
• The RW 1 is the world's smallest commercial reaction wheel. The RW 1 was developed by Astro-und Feinwerktechnik AdlershofGmbH and Magson GmbH under scientific leadership of the Berlin Institute of Technology (TU Berlin). It was successfully launched and has been operated on the pico satellite "BEESAT" of TU Berlin. BEESAT was launched on 23rd September 2009 on an Indian PSLV.
http://www.astrofein.com/astro-und-feinwerktechnik-adlershof/products/raumfahrt-eng/74/rw-1-eng/
20:58CTEE 16

Propulsor a gás frio
20:58CTEE 17
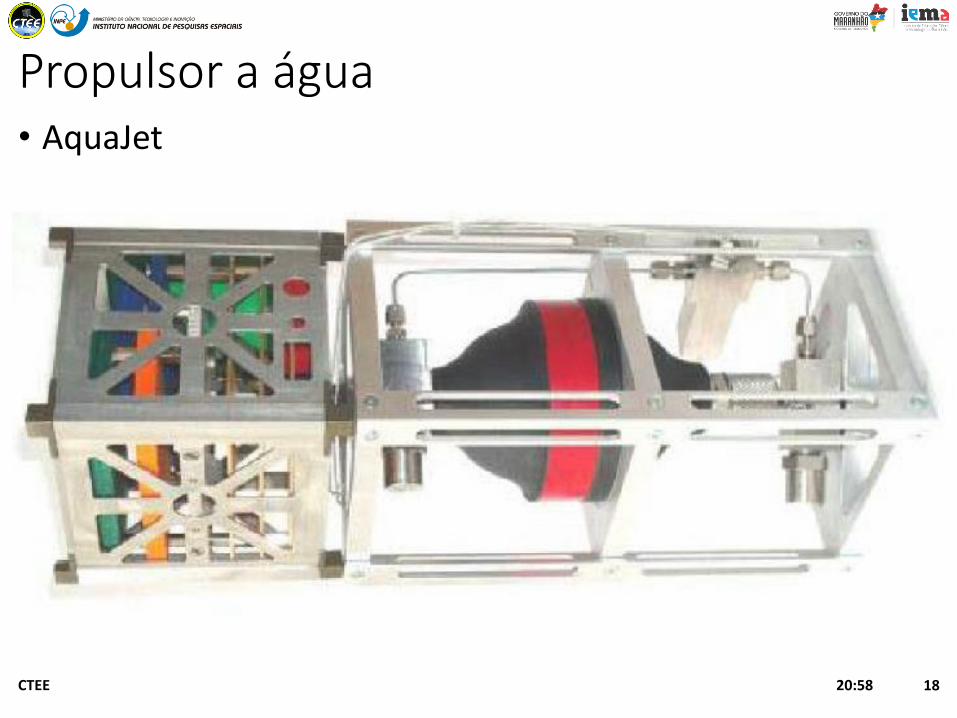
Propulsor a água• AquaJet
20:58CTEE 18

Propulsor Elétrico• ArcJet
https://www.nasa.gov/centers/ames/research/technology-onepagers/arcjetcomplex.html
20:58CTEE 19
Modelos
20:58CTEE 20
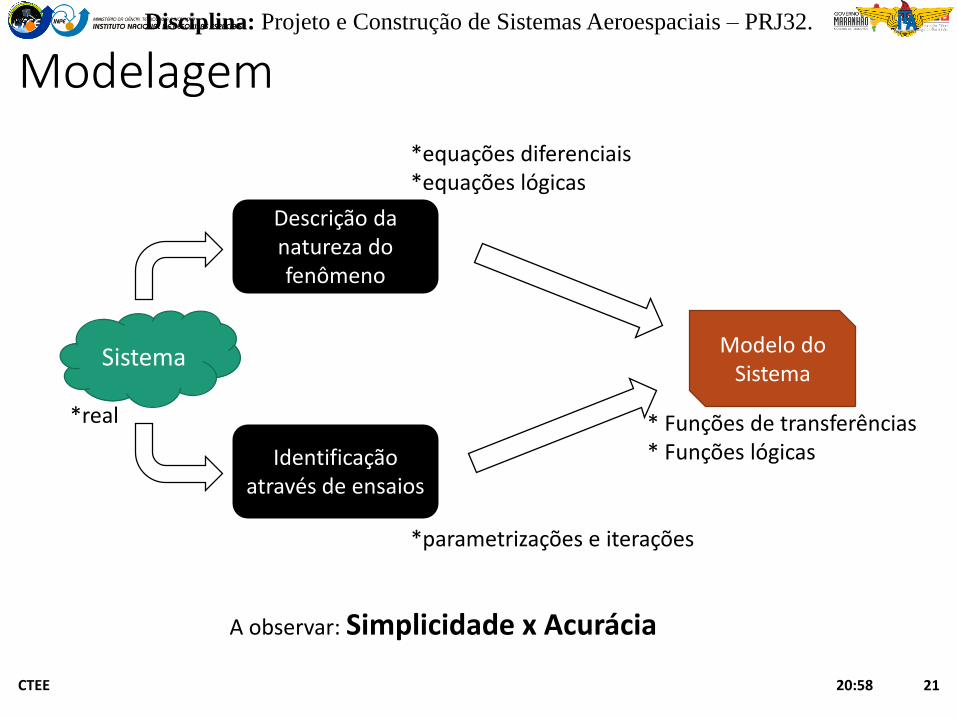
ModelagemDisciplina: Projeto e Construção de Sistemas Aeroespaciais – PRJ32.
Sistema
Descrição da natureza do fenômeno
Identificação através de ensaios
*equações diferenciais *equações lógicas
*parametrizações e iterações
Modelo do Sistema
A observar: Simplicidade x Acurácia
*real * Funções de transferências* Funções lógicas
20:58CTEE 21
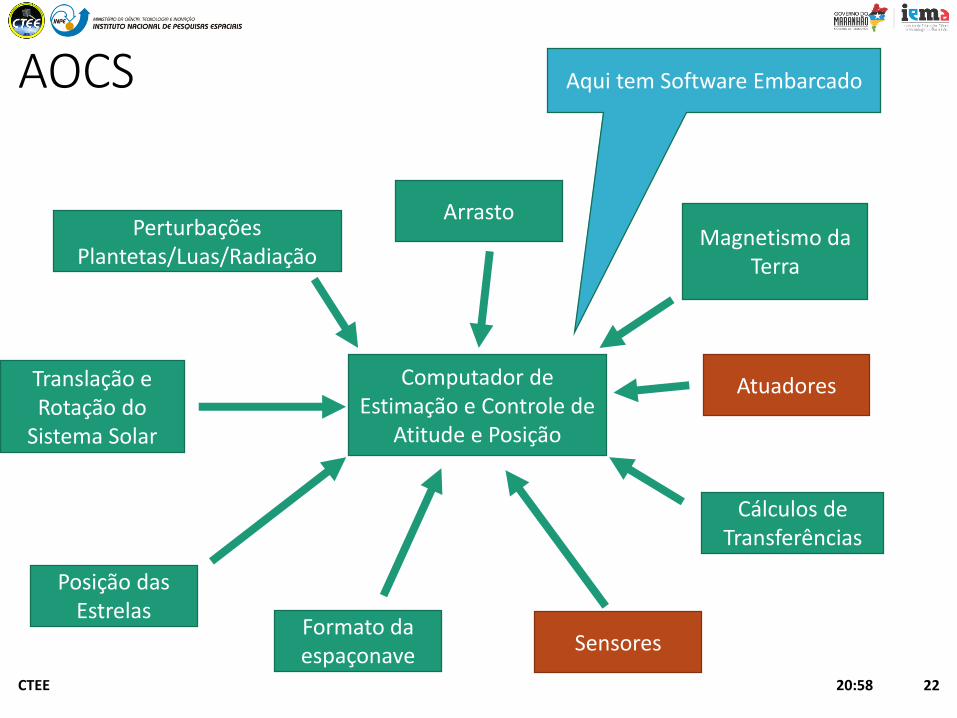
AOCS
Computador de Estimação e Controle de
Atitude e Posição
Perturbações Plantetas/Luas/Radiação
ArrastoMagnetismo da
Terra
Translação e Rotação do
Sistema Solar
Posição das Estrelas
Formato da espaçonave
Sensores
Atuadores
Cálculos de Transferências
Aqui tem Software Embarcado
20:58CTEE 22
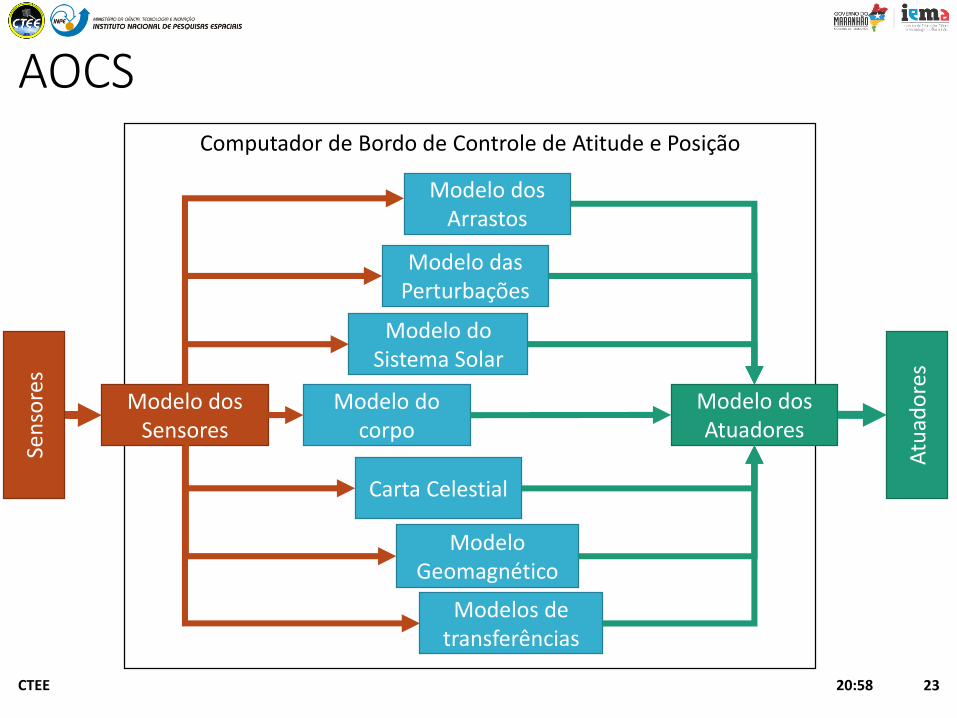
AOCSComputador de Bordo de Controle de Atitude e Posição
Modelo das Perturbações
Modelo dos Arrastos
Modelo Geomagnético
Modelo do Sistema Solar
Carta Celestial
Modelo do corpo
Modelo dos Sensores
Modelo dos Atuadores
Modelos de transferências
Sen
sore
s
Atu
ado
res
20:58CTEE 23
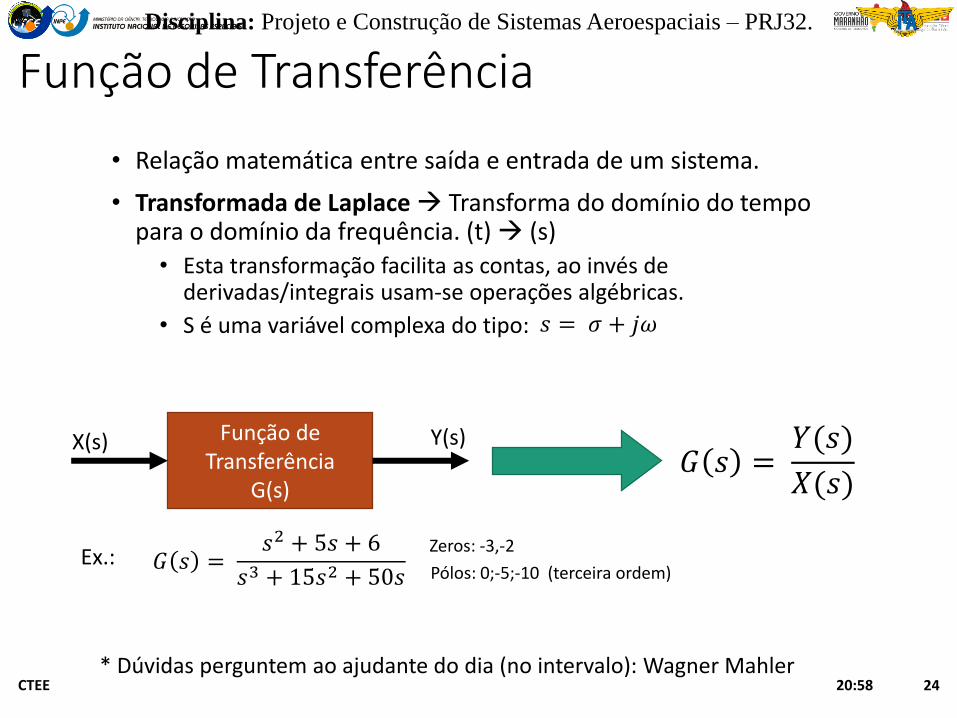
Função de Transferência
• Relação matemática entre saída e entrada de um sistema.
• Transformada de Laplace Transforma do domínio do tempo para o domínio da frequência. (t) (s)
• Esta transformação facilita as contas, ao invés de derivadas/integrais usam-se operações algébricas.
• S é uma variável complexa do tipo:
Disciplina: Projeto e Construção de Sistemas Aeroespaciais – PRJ32.
Função de Transferência
G(s)
X(s) Y(s)𝐺 𝑠 =
𝑌(𝑠)
𝑋(𝑠)
𝑠 = 𝜎 + 𝑗𝜔
* Dúvidas perguntem ao ajudante do dia (no intervalo): Wagner Mahler
𝐺 𝑠 =𝑠2 + 5𝑠 + 6
𝑠3 + 15𝑠2 + 50𝑠Ex.:
Pólos: 0;-5;-10 (terceira ordem)
Zeros: -3,-2
20:58CTEE 24
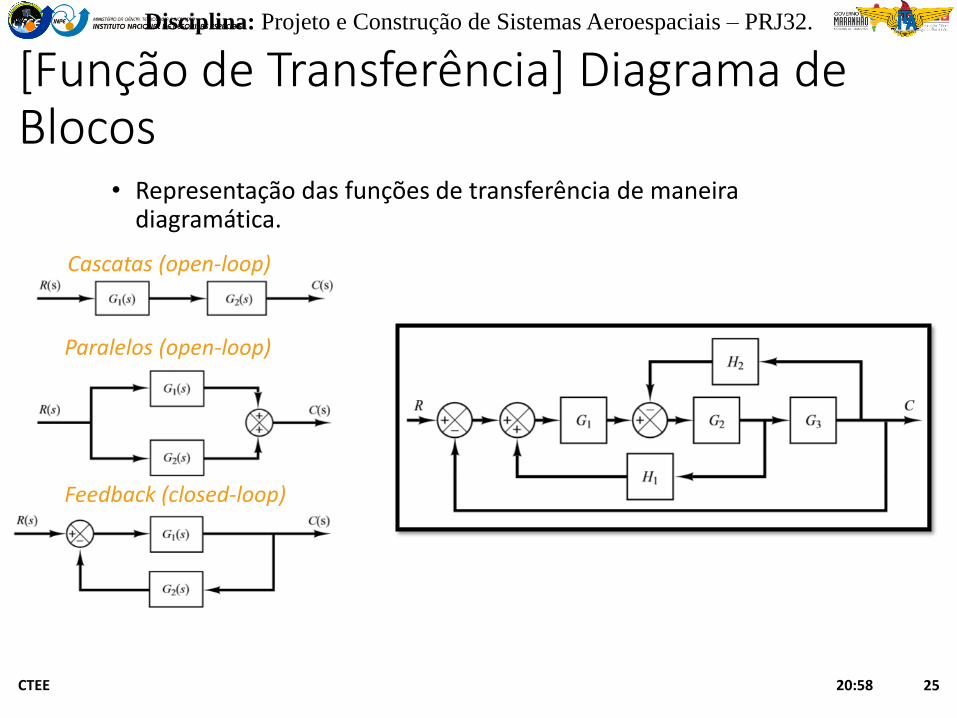
[Função de Transferência] Diagrama de Blocos
• Representação das funções de transferência de maneira diagramática.
Disciplina: Projeto e Construção de Sistemas Aeroespaciais – PRJ32.
Paralelos (open-loop)
Cascatas (open-loop)
Feedback (closed-loop)
20:58CTEE 25

PID – Proporcional-Integral-Derivativo
• P -> Compensador de ganho (constante)
• I -> Atrasa a ação da função (diminui erro no regime permanente, pode oscilar)
• D -> Adianta a ação da função (melhora estabilização, reduz acomodação no transitório)
Disciplina: Projeto e Construção de Sistemas Aeroespaciais – PRJ32.
http://www.dca.ufrn.br/~meneghet/FTP/Controle/scv20071.pdf P = força bruta
I = Ajuste fino
D = Inteligência
PI
PDPID
https://www.youtube.com/watch?v=JEpWlTl95Tw
Output = k*error
reset = reset + k/tau_i*error
Output = k*error + reset
Output = k*error + k/tau_i*
(error – lastError)
LastError =error
https://web.fe.up.pt/~cjr/Mestrado/Anexo%20A%20.pdf20:58CTEE 26
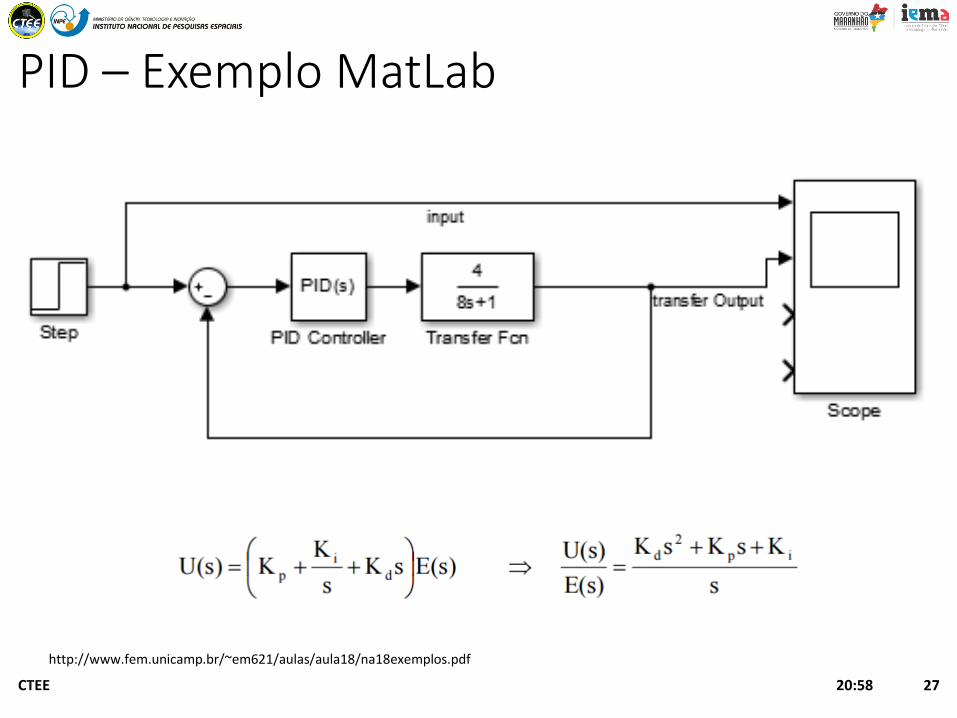
PID – Exemplo MatLab
http://www.fem.unicamp.br/~em621/aulas/aula18/na18exemplos.pdf
20:58CTEE 27
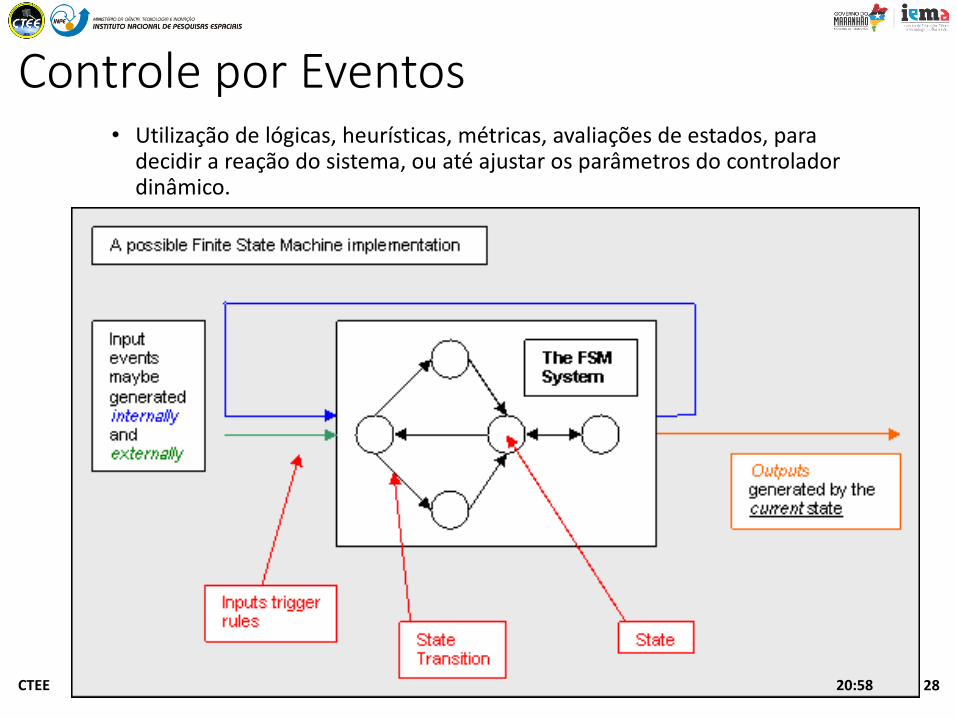
Controle por Eventos• Utilização de lógicas, heurísticas, métricas, avaliações de estados, para
decidir a reação do sistema, ou até ajustar os parâmetros do controlador dinâmico.
20:58CTEE 28

Simulações Físicas
20:58CTEE 29

Mancal de Simulação
20:58CTEE 30
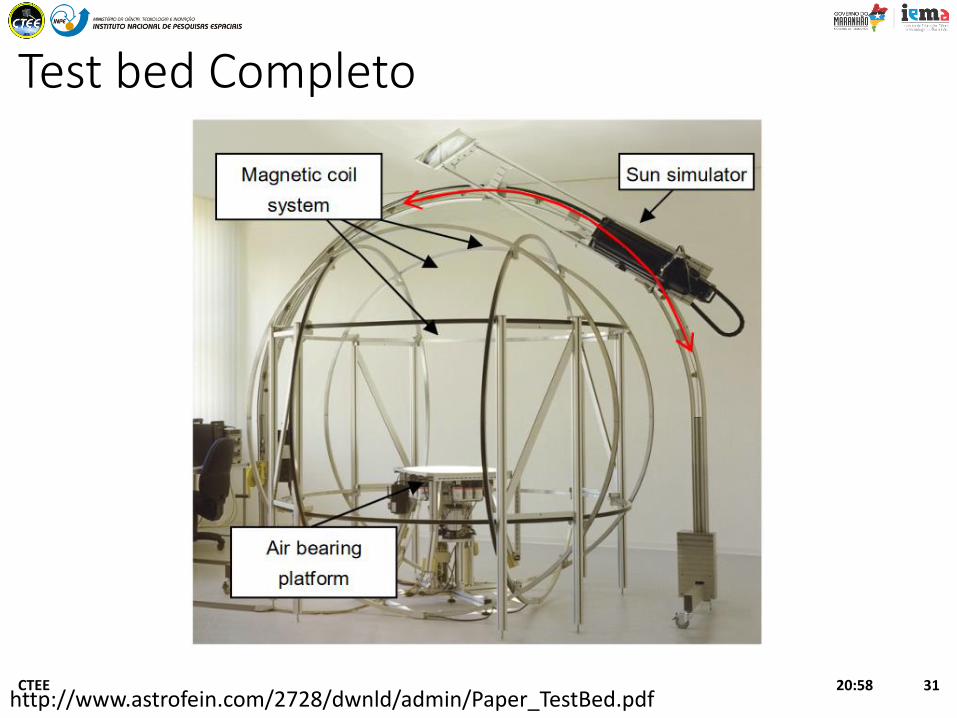
Test bed Completo
http://www.astrofein.com/2728/dwnld/admin/Paper_TestBed.pdf20:58CTEE 31
Propulsão
20:58CTEE 32

1. Determinar todas as funções da propulsão
Requisitos e Objetivos da Missão
Geometria e Orbita
Design da Propulsão
2. Determinar a velocidades inicial e
motores
3. Determinar o impulso total, nível de autonomia
para manobras
4. Listar as opções de propulsão
5. Estimar os parâmetros para cada opção
6. Balanços e documentação
Exemplos´
• Inserção em orbita• Manutenção de orbita• Controle de atitude• Controle de reentrada
Drivers´
• Posição de lançamento, Orbita e geometria desejada, Pesos e atitude final
• Transferência de orbita• Spin • Elevação de orbita• Aceleração para escapar de orbita• Manutenção de orbita• Controle de atitude
Características´
• Químicos / Elétricos• Arquiteturas / redundâncias Parâmetros
´• Potência• Força (N)• Eficiência• Massa • Propelente• Impulso Específico (s)• Tempo de queima• Volume
20:50CTEE 33