CIL044-50
14
EFEITOS DA PENALIZAÇÃO NA SOLUÇÃO ITERATIVA DE SISTEMAS DE EQUAÇÕES LINEARES Rubens M. Sydenstricker [email protected] Alvaro L.G.A. Coutinho [email protected] Marcos A.D. Martins [email protected] Núcleo de Atendimento em Computação de Alto Desempenho, COPPE/ Universidade Federal do Rio de Janeiro Caixa Postal 68516, Rio de Janeiro, RJ 21945-970, Brasil José L.D. Alves [email protected] Luiz Landau [email protected] Laboratório em Métodos Computacionais em Engenharia, COPPE/ Universidade Federal do Rio de Janeiro Caixa Postal 68506, Rio de Janeiro, RJ 21945-970, Brasil Sumário. Elementos finitos de interface têm sido aplicados em problemas de engenharia, geologia e micro-mecânica, para simular fratura e contato entre sólidos. Esses elementos, associados a algoritmos especiais, possibilitam que dois corpos inicialmente em contato sofram deslocamentos relativos de separação ou deslizamento, proporcionando uma estratégia computacional bastante simples, pois provêem os graus de liberdade adicionais necessários caso os corpos inicialmente em contato passem a ter movimentos independentes. Por outro lado, a utilização desses elementos acarreta a introdução de coeficientes penalizados no sistema de equações a partir do qual são calculadas as incógnitas nodais. A presença desses coeficientes conduz a grandes disparidades entre pivôs da matriz de rigidez da estrutura, o que pode causar problemas na solução do sistema de equações, principalmente se métodos iterativos forem utilizados. Neste trabalho, apresentamos uma técnica que permite a eliminação desses coeficientes penalizados do sistema global, através da condensação dos elementos de interface, proporcionando melhores condições para a utilização de métodos iterativos, tais como o dos gradientes conjugados. Critérios para a escolha dos graus de liberdade a condensar e condições ideais para a robustez do método são estudados, e exemplos de aplicação são apresentados. Palavras chave: Elementos finitos de interface, Sistemas de equações penalizados.
-
Upload
eniomesacasa -
Category
Documents
-
view
215 -
download
0
description
EFEITOS DA PENALIZAÇÃO
Transcript of CIL044-50

EFEITOS DA PENALIZAÇÃO NA SOLUÇÃO ITERATIVA
DE SISTEMAS DE EQUAÇÕES LINEARES Rubens M. Sydenstricker [email protected] Alvaro L.G.A. Coutinho [email protected] Marcos A.D. Martins [email protected] Núcleo de Atendimento em Computação de Alto Desempenho, COPPE/ Universidade Federal do Rio de Janeiro Caixa Postal 68516, Rio de Janeiro, RJ 21945-970, Brasil José L.D. Alves [email protected] Luiz Landau [email protected] Laboratório em Métodos Computacionais em Engenharia, COPPE/ Universidade Federal do Rio de Janeiro Caixa Postal 68506, Rio de Janeiro, RJ 21945-970, Brasil
Sumário. Elementos finitos de interface têm sido aplicados em problemas de engenharia, geologia e micro-mecânica, para simular fratura e contato entre sólidos. Esses elementos, associados a algoritmos especiais, possibilitam que dois corpos inicialmente em contato sofram deslocamentos relativos de separação ou deslizamento, proporcionando uma estratégia computacional bastante simples, pois provêem os graus de liberdade adicionais necessários caso os corpos inicialmente em contato passem a ter movimentos independentes. Por outro lado, a utilização desses elementos acarreta a introdução de coeficientes penalizados no sistema de equações a partir do qual são calculadas as incógnitas nodais. A presença desses coeficientes conduz a grandes disparidades entre pivôs da matriz de rigidez da estrutura, o que pode causar problemas na solução do sistema de equações, principalmente se métodos iterativos forem utilizados. Neste trabalho, apresentamos uma técnica que permite a eliminação desses coeficientes penalizados do sistema global, através da condensação dos elementos de interface, proporcionando melhores condições para a utilização de métodos iterativos, tais como o dos gradientes conjugados. Critérios para a escolha dos graus de liberdade a condensar e condições ideais para a robustez do método são estudados, e exemplos de aplicação são apresentados. Palavras chave: Elementos finitos de interface, Sistemas de equações penalizados.

1. INTRODUÇÃO
Métodos computacionais vêem sendo amplamente aplicados a inúmeros problemas de engenharia. Embora um significativo avanço na capacidade de processamento dos computadores tenha sido observado nos últimos anos, a ambição dos pesquisadores tem acompanhado essa evolução, e o tempo de processamento, particularmente o destinado à solução de sistema de equações, permanece como ponto de estrangulamento em diversas aplicações. Métodos iterativos de solução, tal como o dos gradientes conjugados, vem substituindo os métodos diretos inicialmente utilizados, proporcionando uma significativa diminuição no tempo de processamento. Por outro lado, esses métodos são mais suscetíveis a instabilidades decorrentes de mau condicionamento do sistema de equações, tal como ocorre quando há grande disparidade entre pivôs (Ferencz e Hughes, 1998). Este problema ocorre, por exemplo, quando elementos finitos de interface, com coeficientes de rigidez penalizados, são utilizados para simular o contato entre sólidos (Coutinho et al, 2003). Neste trabalho, discutimos a eliminação de pivôs espúrios decorrentes da utilização de interfaces em malhas de elementos finitos, através da condensação estática dos graus de liberdade a eles relacionados.
O restante deste trabalho esta organizado como se segue. Na seção 2 revisamos de forma sucinta os elementos de interface, com ênfase no aspecto da grande disparidade de pivôs que podem surgir nos elementos de espessura muito pequena ou nula. Em seguida apresentamos a aplicação das técnicas de condensação estática introduzidas por Cook et al (1989) para o caso de problemas penalizados. Na seção 4 apresentamos os exemplos numéricos e o artigo se encerra com uma discussão das nossas conclusões principais. 2. ELEMENTOS DE INTERFACE
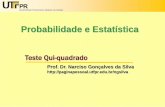
Elementos de interface são utilizados em diversas análises para simular fratura e deslocamentos relativos em corpos inicialmente em contato. A literatura cita freqüentemente os estudos publicados por Goodman et al. (1968) como a primeira aplicação desse tipo de elemento, e muitas outras propostas surgiram desde então. Esses elementos, associados a algoritmos especiais, possibilitam que dois corpos inicialmente em contato sofram deslocamentos relativos de separação ou deslizamento. A Fig. 1 apresenta exemplos de elementos sólidos conectados por elementos de interface, assim como as tensões que neles atuam.
σΝ
σΝ
τzx
τzy
a - caso 2D
t
b - caso 3D
σΝ
τxy
τxy
σΝ
t
tensõescontato
t
tensõescontato
Figura 1 – Elementos de interface para análise 2D e 3D
A figura mostra que os elementos de interface possuem uma geometria degenerada, com
uma das dimensões, a espessura t, muito menor que as demais, sendo comum à utilização de elementos de interface de espessura nula. Essa degeneração faz com que os coeficientes de rigidez dos elementos de interface sejam muito mais elevados do que aqueles verificados nos elementos de contínuo adjacentes. No caso de elementos de espessura nula, esses coeficientes

são teoricamente infinitos, e valores arbitrariamente elevados são atribuídos aos módulos de elasticidade do material que constitui a interface.
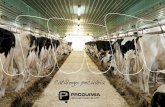
Uma breve revisão da literatura e uma discussão quanto ao comportamento mecânico de elementos de interface para análise bi e tridimensional podem ser encontradas em (Coutinho et al., 2003). Neste trabalho, por simplicidade, vamos considerar uma análise bidimens ional, utilizando o elemento proposto por Herrman (1978), que neste trabalho será denominado elemento LRH e representado pela associação de molas verticais e horizontais de mesma rigidez, como indica a Fig. 2.
C
CC
C
1
4 3
2
t
Figura 2 – Elemento LRH com C1=C2=C
A espessura t do elemento é considerada nula, e os coeficientes das molas são
teoricamente infinitos (coeficientes penalizados). Para simular o contato entre sólidos, que podem eventualmente apresentar deslocamentos independentes, adota-se uma estratégia que pode ser resumida como:
A) Se ocorrer tração no elemento de interface (separação entre os blocos) Então todos os coeficientes de rigidez do elemento são anulados (falha por tração)
B) Se as tensões de cisalhamento atingirem um valor limite (deslizamento)
Então os coeficientes das molas horizontais são anulados (falha por cisalhamento), e a tensão de cisalhamento é suposta constante e igual à tensão limite.
3. CONDENSAÇÃO ESTÁTICA DE GRAUS DE LIBERDADE PENALIZADOS 3.1 Caracterização do problema
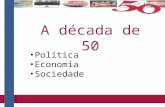
Considere a estrutura da Fig. 3, submetida ao carregamento e condições de apoio indicados. A estrutura é composta de 2 linhas com 4 elementos de membrana quadrilaterais (M1 a M8) , 1 linha de 4 elementos de interface do tipo LRH (I1 a I4) e 1 linha de 4 elemento de treliça (T1 a T4), como mostra a figura.
1 5432
T1 T4T3T2
I1 I3 I4I2
M1 M2 M3 M4
M5 M6 M7 M8
6 10987
16 20191817
11 15141312
q
Lx
y,v
x, u
Ly
t=0
iui
vi
membranas
interfacestrelicas
Figura 3 –Estrutura com 8 membranas, 4 interfaces e 4 barras (20 nós e 40 g.l.)

A matriz de rigidez da estrutura (sem prescrições de contorno) é constituída por 40 linhas
e 40 colunas. Considerando que o coeficiente de rigidez Kij é igual à força na direção do deslocamento di, quando dj = 1 e todos os demais graus de liberdade são nulos, podemos avaliar as características da matriz de rigidez da estrutura. Por exemplo, o coeficiente Ku8,u8 é igual à força que deve ser aplicada na direção do deslocamento u8, para que u8 seja igual a 1, quando todos os demais graus de liberdade são nulos. Assim, como o nó 8 está conectado apenas a elementos de membrana, a rigidez Ku8,u8 tem uma grandeza compatível com os coeficientes de membrana (não penalizados). Por outro lado, o coeficiente Ku18,u18 é penalizado pelos elementos de interface conectados ao nó 18. Assim, para que u18 seja igual a unitário, com os demais g.l. nulos, é preciso que não apenas os elementos de membrana M6 e M7 sejam deformados, como também que molas horizontais dos elementos I2 e I3 tenham seus comprimentos variados em 1 unidade. Então, o coeficiente Ku18,u18 tem uma grandeza compatível com a rigidez de elementos de interface (penalizada). Fica, portanto, caracterizado que a matriz de rigidez da estrutura apresenta grandes disparidades entre os coeficientes da diagonal principal (pivôs). 3.2 Eliminação de pivôs espúrios através da técnica de condensação estática
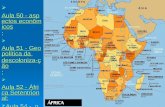
Considere que os elementos M5 a M8, I1 a I4 e T1 a T4 sejam agrupados em um único macro-elemento, através da condensação estática dos graus de liberdade associados aos nós 16 a 20 conforme a Fig. 4a. Neste caso, a estrutura passa a ser constituída por quatro elementos de membrana e um macro-elemento, como mostra a Fig. 4b.
T1 T4T3T2
I1 I3 I4I2
M5 M6 M7 M8
6 10987
16 20191817
11 15141312
y,v
x, u
1 5432
M1 M2 M3 M4
6 10987
11 15141312
q
Lx
y,v
x, u
Ly
iui
vi
macro-elemento
a – Macro-elemento com 20 g.l. externos b - Estrutura com 15 nós e 30 g.l.
Figura 4 – Estrutura com macro-elemento
Podemos notar os nós 1 a 5 e 6 a 10 estão conectados apenas a elementos de membrana. Assim, os coeficientes associados aos seus graus de liberdade têm grandeza compatível com rigidez de membrana (não penalizados). Por outro lado, os nós 11 a 15 estão conectados aos elementos de interface, e os coeficientes de rigidez a eles associados dependem das características dos coeficientes de rigidez do macro-elemento. Considere que, no macro-elemento da Fig. 4a, seja aplicada uma força na direção de v12 com os demais deslocamentos externos prescritos (vinculados), como indica a Fig. 5a. Se o deslocamento vertical do nó 12 for unitário, então a força aplicada é igual ao coeficiente Kv12,v12, e as reações de apoio verificadas na direção dos demais graus de liberdade são os demais coeficientes de rigidez associados a essa configuração (Kui,v12 e Kvi,v12; i≠12). Podemos notar que os elementos de treliça não são solicitados e, portanto, não interferem nos coeficientes de rigidez. Notamos também que os elementos de I1 e I2 são comprimidos. Contudo, os elementos de interface não transferem esforços para os nós 16, 18, 11 ou 13 (veja as Fig. 2 e 4a) e, para que o nó interno

17 se desloque para cima, basta que os elementos de membrana M5 e M6 se deformem. Portanto, a força aplicada na direção de v12 tem grandeza compatível com coeficientes de rigidez de membrana. Assim, o pivô Kv12,v12 ,assim como os demais coeficientes associados a esta configuração, não são penalizados pela presença dos elementos de interface.
I1 I3 I4I2
M5 M6 M7 M8
6 10987
16 20191817
11 15141312
y,v
x, u
Fy12
I1 I3 I4I2
M5 M6 M7 M8
6 10987
16 20191817
11 15141312
y,v
x, u
Fx12
a – Configuração v12 = 1, demais g.l. nulos b – Configuração u12 = 1, demais g.l. nulos
Figura 5 - Configurações deformadas para o macro-elemento
A mesma análise para a configuração u12=1 (Fig. 5b) permite afirmar que o pivô Ku12,u12, assim como os demais coeficientes associados a essa configuração, não são penalizados pela rigidez excessiva dos elementos de interface. Fica então caracterizado que nenhum efeito dos coeficientes penalizados das interfaces é levado para a matriz de rigidez da estrutura na qual o macro-elemento será inserido (Fig. 4b). 3.3 – Determinação da matriz de rigidez do macro-elemento (condensação estática)
A técnica de condensação estática é bastante simples, de fácil implementação (veja, por exemplo, Cook et al., 1989) e as principais equações envolvidas serão reproduzimos a seguir. Devemos observar que, no estudo que expusemos anteriormente, os nós 16 e 20 (nós de contorno do macro-elemento, veja a Fig. 4a) foram condensados enquanto que, de modo geral, a técnica é aplicada apenas a nós fisicamente internos ao macro elemento. Neste trabalho, nos referimos a nós internos como sendo os nós condensados, e nós externos como nós não condensados. Observações quanto à condensação de graus de liberdade de periferia serão consideradas posteriormente.
Imagine que o sistema de equações [K]{d}={R} de uma sub-estrutura (macro-elemento) seja particionado como:
=
}{}{
}{}{
][][][][
c
r
c
r
cccr
rcrr
RR
dd
KKKK
(1)
onde {dr} contem os graus de liberdade que serão retidos (externos), {dc} contem os graus de liberdade que serão condensados (internos), {Rr} contém as forças externas aplicadas na direção dos g.l. retidos e {Rc} as forças nodais aplicadas na direção do g.l. a condensar. Da partição inferior da Eq. (1), podemos escrever o vetor {dc} como:
( )}{}]{[]-[K}{d -1ccc crcr RdK −= (2)
e da partição superior obtemos:

}{}]{[}]{[ rcrcrrr RdKdK =+ (3)
Substituindo a Eq. (2) em (3) encontramos:
( ) }{]][[}{}{ ][]][[][ 11cccrcrrcrccrcrr RKKRdKKKK −− −=− (4)
A Eq. (4) pode ser escrita como:
}{}]{[ macrormacro RdK = (5) onde [Kmacro] e {Rmacro } são respectivamente a matriz de rigidez e o vetor de forças da sub-estrutura (macro-elemento) dados por: ][]][[][][ 1 rKKcKKK cccrrrmacro
−−= (6) }{]][[}{}{ 1
cccrcrmacro RKKRR −−= (7)
Nas Eq. (6) e (7), notamos a presença da inversa da matriz [Kcc], o que indica a presença de um sistema de equações, cujas características são de interesse. Para o macro-elemento representado na Fig. 4a, os vetores {dr} e {dc} são dados por:
]}ˆ{ }ˆ{ }ˆ{ }ˆ{ }ˆ{ }ˆ{ }ˆ{ }ˆ{ }ˆ{ }ˆ[{}{ T
15T
14T
13T
12T
11T
10T
9T
8T
7T
620 ddddddddddd Tr = (8)
]}ˆ{ }ˆ{ }ˆ{ }ˆ{ }ˆ[{}{ T
20T
19T
18T
17T
1610 dddddd Tc = (9)
onde ]v̂ ˆ[}ˆ{ ii
Ti ud = é o vetor de graus de liberdade do nó i.
O centro de nosso interesse são os coeficientes da diagonal da matriz 10x10][ ccK (pivôs Ku16,u16 a Kv20,v20). Analisando a Fig. 4a, notamos de para que o deslocamento u16 seja unitário, com todos os demais g.l. nulos, é preciso que o elemento de membrana M5 seja deformado, assim como a mola horizontal esquerda do elemento I1. Portanto, o pivô Ku16,u16 sofre influência de M5 e I1, como indicamos na Fig. 6.
20
20
19
19
18
18
17
17
16
16
M8I4
M8I4
8743
8743
76326
76326
652165
6521
5M5I1
5M5I1
20201919181817171616
v̂
ˆv̂ˆv̂ˆv̂
ˆv̂
ˆ
0000
][
v̂ ˆ v̂ ˆ v̂ ˆ v̂ ˆ v̂ ˆ
u
u
u
u
u
K
uuuuu
MMII
MMII
MMIIM
MMIIM
MMIIMM
MMII
M
M
cc
=
+
+
+++
+++
+++
+++
++++
+++
+
+
Figura 6 – Coeficientes da matriz [Kcc] O pivô Ku17,u17 pode ser avaliado ponderando-se que o deslocamento horizontal do nó 17 é resistido pelos elementos M5, M6, I1 e I2. Dessa forma, podemos avaliar todos os

coeficientes da diagonal de [Kcc], como apresentamos na Fig. 6. Observamos que todos os pivôs foram penalizados pela rigidez excessiva dos elementos de interface, ou seja, não há grande disparidade entre eles. Na figura, indicamos também os elementos que podem contribuir para os coeficientes de rigidez relativos ao deslocamento u17 (terceira coluna de [Kcc]). Notamos a presença de termos não penalizados fora da diagonal. 3.4 Considerações quanto à abrangência da técnica proposta
Graus de liberdade prescritos. Imagine que na estrutura da Fig. 3, os nós 16 e 20 tenham os deslocamentos horizontais prescritos (vinculados a aparelhos de apoio). Neste caso, podemos não condensar os graus de liberdade u16 e u20 e o macro elemento passaria a ter 12 nós e 22 graus de liberdade, como mostra a Fig. 7.
T1 T4T3T2
I1 I3 I4I2
M5 M6 M7 M8
6 10987
16 20191817
11 15141312
y,v
x, u
v6
u6
v7
u7
v8
u8
v9
u9
v10
u10
v11
u11
v12
u12
v13
u13
v14
u14
v15
u20
u15
u16
Figura 7 – macro-elemento com 22 graus de liberdade externos Aplicando o mesmo raciocínio utilizado nas seções 3.2 e 3.3, concluímos que todos os
pivôs da nova matriz [Kcc]8x8 permanecem penalizados, garantindo a homogeneidade da diagonal. Concluímos também que os pivôs Ku16,u16, Ku20,u20 da estrutura serão penalizados pelos coeficientes de interface associados aos deslocamento u16 e u20 (elementos I1 e I4). Contudo, como esses graus de liberdade estão prescritos, as linhas e colunas a eles correspondentes serão eliminadas do sistema de equações globais, livrando-o desses coeficientes espúrios. Note que os deslocamentos v16 e v20 permanecem sendo condensado, o que garante a inexistência pivôs penalizados após as prescrições de apoio. Assim, graus de liberdade de elementos de interface podem ser prescritos, sem alterar o bom condicionamento do sistema resultante.
Seleção dos graus de liberdade a condensar. Nas condensações consideradas até aqui, apenas uma linha de elementos de membrana foi incluída no macro-elemento. Imagine agora que toda a estrutura da Fig. 3 constitua um macro-elemento, através da condensação dos g.l. associados aos nós 6 a 10 e 16 a 20. Neste caso, a matriz de rigidez externa do macro-elemento permanece tendo apenas coeficientes característicos de membrana e treliça, e o sistema global da estrutura à qual o macro-elemento for conectado não será penalizado pela presença dos elementos de interface. Por outro lado, na matriz [Kcc]20x20, surgem termos não penalizados, tais como Ku8,u8, visto que o nó 8 está conectado apenas a elementos de membrana. Assim, a matriz [Kcc] passa a ter pivôs penalizados e não penalizados. Estes últimos constituindo elementos espúrios, que podem causar problemas nas operações de condensação e recuperação dos g.l. condensados. Portanto, ao envolvermos a interface em um macro-elemento, é conveniente que não mais de uma linha de elementos de membrana seja disposta em cada lado da interface.

Conforme comentamos anteriormente, os graus de liberdade condensados são invisíveis para a estrutura global, e não podem estar em contato com qualquer elemento externo. Por exemplo, se à aresta 6-11 da estrutura da Fig. 3 (ou macro-elemento da Fig. 4a) for conectado um elemento quadrilateral, então estará sendo introduzida uma incompatibilidade (descontinuidade) entre os deslocamentos u16 e v16 (internos do macro-elemento/estrutura) e aqueles fornecidos pelo campo de deslocamento do elemento externo. Se o elemento externo for corretamente conectado aos nós 6 e 16, a condensação pode adaptar-se, como exemplifica a Fig. 8. Na Fig. 8a, indicamos que dois novos elementos de membrana (NM1 e NM2) foram adicionados à estrutura da Fig. 3, e na Fig. 8b apresentamos o macro-elemento correspondente. Observe que os coeficientes de rigidez penalizados das interfaces não são transferidos para o sistema de equações global, enquanto que os pivôs da matriz [Kcc] permanecem uniformemente penalizados.
1 5432
T1 T4T3T2
I1 I3 I4I2
M1 M2 M3 M4
M5 M6 M7 M8
6 10987
16 20191817
11 15141312
Lx
y,v
x, u
Ly
t=0
iui
v i
N1
N2
N3
NM1
NM2
T1 T4T3T2
I1 I3 I4I2
M5 M6 M7 M8
6 10987
16 20191817
11 15141312
y,v
x, u
N3
N2
NM2
a – estrutura com 23 nós e 46 g.l. b – macro-elemento com 24 g.l. externos
Figura 8 – Estrutura com 10 membranas, 4 interfaces e 4 barras Falha de elementos de interface. Conforme discutimos na seção 2, elementos de interface estão sujeitos a singularidades, ou seja, podem ter coeficientes de rigidez anulados em caso de falha por tração ou cisalhamento. Devemos notar que a falha de elementos de interface pode até conduzir a uma singularidade do macro-elemento (se for generalizada), mas não produzirá coeficientes penalizados na sua matriz de rigidez e, portanto, não afeta a consistência do sistema de equações global. Por outro lado, a falha de interfaces resulta na perda da uniformidade da diagonal da matriz [Kcc] (veja a Fig. 6). Considere, por exemplo, que no macro-elemento da Fig. 4a, o elemento I2 tenha sofrido deslizamento e o elemento I1 tenha sofrido separação. Neste caso os deslocamentos u16, v16 e u17 podem ser considerados como g.l. externos, e o macro-elemento tem a forma indicada na Figura 9.
I1 I3 I4I2
M5 M6 M7 M86 10987
16 20191817
11 15141312
v6
u6
v7
u7
v8
u8
v9
u9
v10
u10
v11u11
v12u12
v13u13
v14u14
v15u15
u17v16
u16
Figura 9 – Macro elemento com 12 nós e 23 g.l. externos Notamos que os pivôs Ku16,u16, Kv16,v16 e Kuu17,u17 (não penalizados) passam a pertencer à matriz de rigidez externa do macro-elemento [Kmacro ]23x23 , enquanto que a diagonal de [Kcc] passa a

ser constituída pelos pivôs Kv17,v17, Ku18,u18, Kv18,v18, Ku19,u19, Kv19,v19, Ku20,u20, Kv20,v20 (todos penalizados). Portanto, parece-nos possível estabelecer uma estratégia de adaptatividade do macro-elemento, de forma que a diagonal de [Kcc] se mantenha uniforme. Uma estratégia mais simples consiste em adotar um método direto de solução para realizar as operações de condensação de graus de liberdade, e contar com a robustez do método para suportar a presença de eventuais pivôs espúrios, enquanto que o sistema global de equações (livre de penalizações) pode ser resolvido utilizando métodos iterativos. 4. EXEMPLO NUMÉRICO 4.1. Descrição do problema
Nesta seção, vamos considerar a estrutura da Fig. 3, submetida ao carregamento e condições de contorno indicados, adotando os dados fornecidos na Tabela 1. A malha foi gerada de forma regular, ou seja, elementos de mesma natureza têm a mesma geometria.
Tabela 1 – Dados de carregamento, geometria e materiais
Geometria Carga Materiais Membranas treliças interfaces
Lx = 6,00m Ly = 1,00m t = 0,00m tz = 1,00m
q =10,00KN/m
E= 2.000,00 KN/m2 ν = 0,00 (estado plano de def.)
E = 20.000,00 KN/m2 A = 0,10 m2
DI11 = DI22 = D
(unidades em KN/m2)
Note que as propriedades elásticas do elemento de interface utilizado foram dadas em
função do parâmetro D, característico de elemento contínuo, tendo a transformação sido realizada conforme Coutinho et al. (2003)1 ou seja:
1111 75,0
21 DI
DIC ==
l ; 22
22 75,02
2 DIDI
C ==l
onde l é o comprimento do elemento de interface (no problema em estudo 5,1=l m). Na Tabela 2, apresentamos uma estimativa de rigidez para cada tipo de elemento. A estimativa é feita em função das matrizes ][ membK , ][ .intK e ][ .trelK , cujos coeficientes têm módulo igual ou inferior a 1. A tabela mostra que os coeficientes de interface têm mesma ordem de grandeza que os demais elementos para D em torno de 103.
Tabela 2 – Estimativa da rigidez dos elementos (valores em KN/m2)
Membrana Interface Treliça ][ 10 x 1,2][ 3
membmemb KK = ][ 75,0 ][ .intint KDK = ][ 10 x 1,3 ][ .3
. treltrel KK = Duas configurações foram consideradas: estrutura plena, sem graus de liberdade condensados (sistema global com 31 equações – Fig. 3) e estrutura com macro elemento, obtido pela condensação dos graus de liberdade penalizados (sistema global com 21 equações – Fig. 4b).
1 Pode-se demostrar que essa relação estabelece equivalência entre os comportamentos do elemento LRH e aquele proposto por Goodman et al. (1968) para o caso de cargas uniformes

A incidência dos elementos foi numerada como indica a Fig. 10, e os graus de liberdade não prescritos foram numerados seqüencialmente, de forma que, para as duas configurações, os deslocamentos livres dos nós 1,6,11, e 5,10,15 correspondem aos seguintes pivôs:
Kv1,v1 = K1,1 ; Kv5,v5 = K8,8
Kv6,v6 = K9,9 ; Kv10,v10 = K16,16 Ku11,u11 = K17,17 ; Ku15,u15 = K21,21
1
43
2
membrana
1
43
2
interface
1 2
treliçaX
Y
Figura 10 – Incidência dos elementos Na Fig. 11a esquematizamos a sub-estrutura que foi condensada, e na Fig. 11b indicamos
o macro-elemento correspondente. Também indicamos a numeração local das equações adotada.
T1 T4T3T2
I1 I3 I4I2
M5 M6 M7 M8
1 5432
6 10987
11 15141312
x, u
1 3 5 7 9
2 4 6 8 10
11
12
13
1415
1617
18
19
20
21
22
23
24
25
26
27
28
29
30
y,v
1 5432
6 10987
y,v
x, u
21
43
87
65
109
1211
1615
1413
1817
2019
a) sub-estrutura com 15 nós e 30 g.l. b) macro-elemento com 10 nós e 20 g.l.
Figura 11 – Condensação estática: numeração local de nós e deslocamentos
Na Fig.12, representamos a matriz de rigidez da sub-estrutura da Fig. 11a, particionada como indicado na Eq. (1). No lado esquerdo da figura, as matrizes [Krr], [Krc] e [Kcr] também foram particionadas, sendo que, na partição referente à matriz [Krr], observamos duas matrizes nulas na diagonal secundária, revelando a ausência de elementos que conectem os nós 1-5 aos nós 6-10 (numeração local, conforme a Figura 11a). Ainda, como os nós 1-5 estão conectados apenas a elementos de membrana, não há coeficientes penalizados nas matrizes [Krra], [Krca], [Kcra]. Por outro lado, os nós 6 a 15 estão conectados a elementos de interface, o que acarreta a presença de elementos penalizados nas matrizes [Krrb], [Krcb], [Kcrb] e [Kcc] que, na Fig. 12, estão salientadas em negrito.
[KSE]30x30 =
1 2120 30 1
202130
][Krc20x10
Krr ][20x20=
1
2021
30
[Krra]10x10
[Krrb]10x10
[Kcc]10x10
[Krca]10x10
[Krcb]10x10
[Kcra]10x10 [Kcrb]10x10
[ 0 ]10x10
[ 0 ]10x10
1 2120 3010 11
} }} nós 11 a 15nós 6 a 10nós 1 a 5
}}}
nós1 a 5
nós6 a 10
nós11 a 15
} }nós 11 a 15nós 1 a 10
][Kcc10x1010x20
Kcr][
Figura 12 – Particionamento da matriz de rigidez da sub-estrutura com 15 nós e 30 g.l.

Para as duas configurações adotadas, o sistema global de equações foi resolvido utilizando-se um método direto (eliminação de Gauss, com armazenamento por altura efetiva de coluna) , e as rotinas para condensação dos nós internos são aquelas fornecida fornecidas por Cook et. Al. (1989). O valor do parâmetro de rigidez das interfaces (DI11 = DI22=D, veja a Tabela 1), foram variados até que houvesse falha na obtenção das incógnitas nodais. Devido ao carregamento e do material considerado (coeficiente de Poisson nulo), os deslocamentos horizontais são nulos, e as respostas analíticas para deslocamentos verticais são facilmente obtidas, e estão reproduzidas na Tabela 3. O problema também foi resolvido para ?=0.25, tendo levado a conclusões semelhantes, e os resultados não serão apresentados.
Tabela 3 – Deslocamentos verticais (respostas analíticas)
Nós 1 a 5 6 a 10 16 a 20 v (m) -5x10-3 - 10/D -2.5x10-3 - 10/ D - 10/ D
4.2 Resultados iniciais Consideramos inicialmente a estrutura plena, com 20 nós e 31 equações, como representa a Fig. 3. Os deslocamentos mantiveram-se estáveis e coerentes até D=1019, com excelente concordância com os resultados teóricos. Na Tabela 4, apresentamos os deslocamentos verticais dos nós livres para D=1010 e D=1019 , enquanto que os deslocamentos horizontais se mantiveram insignificantes (da ordem de 10-19), como esperado. Para D=1020, a rotina de solução é interrompida, indicando a equação 17 (deslocamento horizontal do nó 11) com pivô negativo (Ku11,u11= -141,5436). Note que os resultados indicam que o método direto suportou uma relação Pivopenalizado /Pivonão penalizado da ordem de 1016 (veja a Tabela 2), o que pode ser considerado satisfatório. Observe também que, pela numeração nodal adotada (veja a Fig. 3), o pivô negativo indicado corresponde ao primeiro grau de liberdade conectado a um elemento de interface. Todos os resultados foram apresentados neste trabalho foram obtidos em um PC Pentium III 500.
Tabela 4 – Deslocamentos verticais para estrutura plena (20 nós e 31 equações)
Nós D=1010 D=1019 1 a 5 -0.500000100E-02 -0.500000000E-02 5 a 10 -0.250000100E-02 -0.250000000E-02 16 a 20 -0.100000000E-08 -0.100000000E-17
O comportamento observado para a estrutura condensada (21 equações globais, Fig. 4b) é muito semelhante: deslocamentos horizontais da ordem de 10-19 e deslocamentos verticais idênticos aos verificados para a estrutura plena (Tabela 4). Para D=1020, a rotina de condensação opera normalmente, mas a solução do sistema global de equações falha, apontando o mesmo pivô negativo (Ku11,u11). 4.3 Análise dos resultados iniciais A matriz de rigidez do macro-elemento que resulta da condensação da sub-estrutura da Fig. 11a é obtida a partir da Eq. 6 e, como discutimos na seção 3.2, possui apenas coeficientes suaves (não penalizados). Na Figura 12, as matrizes [Krr], [Krc] e [Kcr] foram particionadas, e

as sub-matrizes que possuem termos penalizados foram salientadas em negrito. Na Fig. 13, representamos a matriz de rigidez do macro-elemento da Fig. 11b, com uma partição 2x2 (sub-matrizes [Krra*], [Krrb*] e [Krrc*] e [Krrd*]), dada em termos das sub-matrizes indicadas na Fig. 12.
=[Kmacro] 20x20=[Krra*]10x10
[Krrb*]10x10
[Krrc*]10x10
[Krrd*]10x10
-[Krra][Krrb][ 0 ]
[ 0 ][Krca] [Kcc] [Kcra]
-1 [Krca][Kcc]-1[Kcrb]
[Krcb][Kcc] [Krca]-1 [Krcb] [Kcrb][Kcc]-1=
Figura 13 – Matriz de rigidez condensada
Na Fig. 13, notamos a presença da matriz [Kcc] invertida. Conforme discutimos na seção 3.3 (veja a Figura 6), a matriz [Kcc] é composta de pivôs penalizados e, fora da diagonal, de elementos suaves ou nulos. Assim, [Kcc] pode ser escrita como: ][ ][ cccc KK α= (10) onde a é um número penalizado e ][ ccK possui a diagonal da ordem de uma unidade e os demais termos são nulos ou quase nulos. Portanto, a inversa de [Kcc] é dada por uma matriz suave ( 1][ −
ccK ) dividida por um número penalizado (a) . Assim, espera-se que o produto [Krca][Kcc]-1[Kcra], indicado na partição 1-1 do último termo da Figura 13 resulte em uma matriz aproximadamente nula. As matrizes [Krcb] e [Kcrb] também são penalizadas, podendo ser escritas de forma semelhante à indicada na Eq. (10). De forma análoga, espera-se que os produtos [Krca][Kcc]-1[Kcrb] e [Krcb][Kcc]-1[Kcra] resultem em matrizes suaves. Por outro lado, na partição 2-2 notamos que a inversa de [Kcc] é pré e pós multiplicadas por matrizes penalizadas (produto [Krcb][Kcc]-1[Kcrb]) e a matriz resultante é penalizada, podendo ser escrita na forma da Eq. 10. Assim, na partição 2-2 do último termo da Fig. 13, aguardamos uma matriz penalizada. Na Fig. 14, resumimos essas conclusões, indicando as sub-matrizes penalizadas em negrito.
=[Kmacro] 20x20=[Krra*]10x10
[Krrb*]10x10
[Krrc*]10x10
[Krrd*]10x10
-[Krra]
[Krrb][ 0 ]
[ 0 ]
[Krrc]
[Krrb]
[ 0 ]~ ~[Krrd]~ ~
Figura 14 –Análise da matriz de rigidez condensada
Observando a Fig. 14, concluímos que não há dificuldades para que a matriz [Krra
*] seja
suave, visto que á dada pela diferença entre a matriz [Krra] (suave) e a matriz ~
]0[ (quase-
nula). De forma semelhante, para que [Krrc*] seja suave e não nula, basta que a matriz
~][ crrK
seja suave. Por outro lado, a matriz [Krrb*] é dada pela diferença de duas matrizes com

elementos penalizados, e para que seja suave e não nula, uma grande precisão na
representação de [Krrb] e ~
][ brrK é necessária. Esses efeitos foram observados em nossa análise. Na diagonal principal da matriz
][ macroK (Fig. 14), a sub-matriz [Krra*] comportou-se de forma bastante estável, não
apresentando alterações na diagonal principal quando D foi variado de 1010 a 1020, enquanto que uma clara degeneração dos pivôs da sub-matriz [Krrb
*] foi observada, como mostram as Tabelas 5 e 6. Observamos também que a estabilidade da matriz [Krrc
*], que apresentou alterações insignificantes quando o parâmetro de rigidez de interface (D) foi variado de 1010 a 1020.
Tabela 5 - Pivôs da matriz [Krra
*]10x10 para D=1010, D=1019 e D=1020
Krra*
1,1 Krra*
2,2 Krra*
3,3 Krra*
4,4 Krra*
5,5 Krra*
6,6 Krra*
7,7 Krra*
8,8 Krra*
9,9 Krra*
10,10
1222.22 2111.11 2444.44 4222.22 2444.44 4222.22 2444.44 4222.22 1222.22 2111.11
Tabela 6 - Pivôs da matriz [Krrb*]10x10
D Krra
*1,1 Krra
*2,2 Krra
* 3,3 Krra
*4,4 Krra
*5,5 Krra
*6,6 Krra
*7,7 Krra
*8,8 Krra
*9,9 Krra
*10,10
1010 2555.55 2111.11 5111.11 4222.22 5111.11 4222.22 5111.11 4222.22 2555.55 2111.11
1019 1856.50 1665.50 5761.00 3331.00 5761.00 3331.00 5761.00 3331.00 1856.50 1665.50
1020 0.00000 -0.83E-15 -0.18E-14 -0.11E-13 -0.93E-15 -0.56E-14 -0.93E-15 -0.56E-14 -0.93E-15 -0.65E-14
4.4 Recuperação dos pivôs de [Krrb
*]
Os coeficientes de uma coluna j da matriz de rigidez de uma estrutura correspondem às forças nodais que sobre ele estão aplicadas na configuração dj = 1 e demais deslocamentos nulos. Portanto, devem estar em equilíbrio (no exemplo em estudo, dispomos de três equações de equilíbrio por coluna, duas referentes a translações (equilíbrio de forças) e uma relativa rotação em torno do eixo z). Assim, utilizando as equações de equilíbrio de forças, podemos facilmente obter os pivôs da matriz [Krrb
*] obtidos em função dos demais coeficientes de [Kmacro].
Adotando a técnica acima descrita, recuperamos os pivôs [Krrb*], e resolvemos o
problema com resultados exatos de deslocamentos até D=10300 (para 10350 o programa acusa erro na leitura do dado). Na Tabela 7 apresentamos a matriz [Krrb
*] inicialmente obtida para D= 10300. Podemos observar a forte degradação sofrida pela diagonal. Na Tabela 8 apresentamos os pivôs obtidos após a recuperação da diagonal principal. Note que pivôs retornaram aos mesmos níveis observados para D=1010 (veja a Tabelas 6).
Tabela 7 – Matriz [Krrb
*]10x10 sem tratamento para D=10300
1 2 3 4 5 6 7 8 9 10
0.00 0.25E+03 -0.11E+04 -0.25E+03 0.00 0.00 0.00 0.00 0.00 0.00 0.25E+03 -0.83-295 0.25E+03 0.89E+03 0.00 0.00 0.00 0.00 0.00 0.00
-0.11E+04 0.25E+03 -0.19-294 -0.20-294 -0.11E+04 -0.25E+03 0.00 0.00 0.00 0.00 -0.25E+03 0.89E+03 -0.20-294 -0.11-293 0.25E+03 0.89E+03 0.00 0.00 0.00 0.00
0.00 0.00 -0.11E+04 0.25E+03 -0.93-295 -0.10-294 -0.11E+04 -0.25E+03 0.00 0.00 0.00 0.00 -0.25E+03 0.89E+03 -0.10-294 -0.57-294 0.25E+03 0.89E+03 0.00 0.00 0.00 0.00 0.00 0.00 -0.11E+04 0.25E+03 -0.93-295 -0.10-294 -0.11E+04 -0.25E+03 0.00 0.00 0.00 0.00 -0.25E+03 0.89E+03 -0.10-294 -0.57-294 0.25E+03 0.89E+03 0.00 0.00 0.00 0.00 0.00 0.00 -0.11E+04 0.25E+03 -0.93-295 -0.25E+03 0.00 0.00 0.00 0.00 0.00 0.00 -0.25E+03 0.89E+03 -0.25E+03 -0.65-294

Tabela 8 - Pivôs da matriz [Krrb
*]10x10 D=10300 após recuperação
Krrb*
1,1 Krrb*
2,2 Krrb*
3,3 Krrb*
4,4 Krrb*
5,5 Krrb*
6,6 Krrb*
7,7 Krrb*
8,8 Krrb*
9,9 Krrb*
10,10
0.26E+04 0.21E+04 0.51E+04 0.42E+04 0.51E+04 0.42E+04 0.51E+04 0.42E+04 0.26E+04 0.21E+04
5. Conclusões
Neste trabalho utilizamos a técnica de condensação estática para eliminar os efeitos de penalização decorrentes da utilização de elementos finitos de interface. Os resultados indicam que, se as interfaces forem convenientemente envolvidos por elementos não penalizados, então o sistema global de equações estará livre de elementos espúrios, proporcionando melhores condições para a utilização de métodos iterativos de solução. Condições ideais para que as operações e condensação sejam realizadas com robustez também foram discutidas. Os resultados numéricos indicam relações de equilíbrio entre os coeficientes de rigidez do macro-elementos que resulta da condensação estática podem ser úteis na recuperação de pivôs degenerados. No exemplo em estudo, essa técnica, associada a um esquema adequado de condensação, proporcionou condições para o problema fosse resolvido com precisão para interfaces com valores de rigidez surpreendentemente elevados. Agradecimentos Este trabalho é parcialmente apoiado pelo projeto CNPq 522692/95-8 e pelo Projeto MCT/FINEP/PADCT em Modelagem de Bacias Sedimentares. REFERÊNCIAS Cook, R. D., Malkus, D. S., Plesha, M.E. 1989, Concepts and applications of the finite
element method, 3a ed., John Wiley & Sons, New York. Coutinho, A. L. G. A., Martins, M. A. D., Sydenstricker, R. M., Alves, J. L. D. e Landau, L.,
2003, Simple zero thickness kinematically consistent interface elements, Computers and Geotechnics, 30, pp. 347-374
Goodman, R. E., Taylor, R. L., Brekke, T. L., 1968, A model for the mechanics of jointed rock., ASCE J Soil Mech. Fdns. Div. ,99, pp. 637 –59.
Ferencz, R.M. Hughes, T.J.R., 1998, Iterative Finite Element Solutions in Nonlinear Solid Mechanics, Handbook of Numerical Analysis, Vol VI, Edited by P.G. Ciarlet and J.L. Lions, Elsevier Science.
Herrmann, L.R., 1978, Finite element analysis of contact problems, J. Eng. Mech. (ASCE), 104, pp. 1043 –59.