CAPÍTULO 4 CRIAÇÃO DE UM AMBIENTE...
92
CAPÍTULO 4 CRIAÇÃO DE UM AMBIENTE HIDROINFORMÁTICO PARA APLICAÇÃO EM ZONAS COSTEIRAS
Transcript of CAPÍTULO 4 CRIAÇÃO DE UM AMBIENTE...
CAPÍTULO 4
CRIAÇÃO DE UM AMBIENTE HIDROINFORMÁTICO PARA
APLICAÇÃO EM ZONAS COSTEIRAS


4.2 Ambiente hidroinformático
125
CAPÍTULO 4
CRIAÇÃO DE UM AMBIENTE HIDROINFORMÁTICO PARA APLICAÇÃO
EM ZONAS COSTEIRAS
4.1 Aspectos gerais
No presente capítulo procede-se à caracterização do ambiente hidroinformático criado
neste trabalho de investigação, tendo como objectivo a modelação integrada da
hidrodinâmica e da qualidade da água em zonas costeiras, apresentado-se os programas
que serviram de base ao trabalho, as principais adaptações neles efectuadas e as
inovações introduzidas, bem como os programas novos desenvolvidos. A apresentação
destes programas é feita com a descrição de exemplos de aplicação por forma a
demonstrar a sua adequabilidade na resolução de problemas de engenharia ambiental,
contemplando escalas espacio-temporais diversas, adequadas a cada um deles.
4.2 Ambiente hidroinformático
4.2.1 Generalidades
O sucesso na aplicação de um modelo numérico depende, entre outros factores, da
facilidade de integração num ambiente comum de diferentes tipos de software que
executam tarefas distintas. De facto, com a crescente acessibilidade a uma quantidade
cada vez maior de recursos hidroinformáticos, designadamente através da World Wide
Web, o desenvolvimento de um modelo adaptado a um determinado sistema natural
deverá ser precedido de uma pesquisa criteriosa, tendo em vista a inventariação e
selecção dos recursos disponíveis. Consegue-se assim, muitas vezes, uma economia
apreciável no esforço associado à construção ab initio de um modelo bem como uma

Capítulo 4
126
maior eficácia resultante da utilização de ferramentas informáticas de muito maiores
capacidades.
Procurou-se que o ambiente hidroinformático desenvolvido apresentasse uma grande
versatilidade, quer em termos de hardware (foram utilizados computadores pessoais e
estações de trabalho), quer em termos de sistemas operativos (foram utilizados meios de
cálculo com diferentes sistemas operativos: WINDOWS95, WINDOWSNT, UNIX e LINUX). A
linguagem de programação de utilização preferencial foi o FORTRAN, tendo-se também
procedido à criação de diversas ferramentas codificadas em linguagem C, C++ e Lisp.
4.2.2 Software utilizado
A modelação da hidrodinâmica de zonas costeiras, no ambiente hidroinformático
criado, é realizada recorrendo-se aos programas bidimensionais no plano horizontal
(2DH) TELEMAC2D e RMA2 e aos programas quasi-3D POM e POM-UMH. Este
último modelo integra a adaptação desenvolvida no programa POM no âmbito deste
trabalho (a extensão UMH quer significar Universidade do Minho-Hidrodinâmica) e
que consistiu na inclusão de um método de elementos finitos no cálculo do modo
externo, com o objectivo de aumentar o seu desempenho para condições de fronteira
específicas e para problemas de geometria complexa.
A modelação da qualidade da água em zonas costeiras apresenta dificuldades
decorrentes da complexidade dos processos biogeoquímicos verificados nos diferentes
ecossistemas. O desconhecimento e/ou a dificuldade da quantificação e caracterização
das relações entre os vários elementos de um ecossistema implica uma criteriosa
selecção das formulações a adoptar, por forma a representar adequadamente os
processos determinantes do comportamento de constituintes indicadores do estado da
qualidade da água.
Neste trabalho desenvolveu-se o programa PROCESSOS para simular, de forma o mais
abrangente e aberta possível, os processos biogeoquímicos mais relevantes de um
determinado sistema. Este programa pode funcionar autonomamente ou integrado em
programas hidrodinâmicos.

4.2 Ambiente hidroinformático
127
A qualidade da água de zonas costeiras é simulada, no ambiente hidroinformático
criado, através da utilização do programa PROCESSOS, dos programas bidimensionais
no plano horizontal RMA4 e RMA4-UMQ (a extensão UMQ identifica a versão
desenvolvida na Universidade do Minho para resolução de problemas de qualidade da
água) e do programa quasi-3D POM-UMQ.
A estruturação do ambiente hidroinformático criado é justificada pela necessidade de
disponibilizar ferramentas informáticas diversificadas e versáteis adequadas à resolução
de problemas bidimensionais e quasi-3D característicos de zonas costeiras.
HHIIDDRROODDIINNÂÂMMIICCAA//QQUUAALLIIDDAADDEE DDAA ÁÁGGUUAA
PPRRÉÉ EE PPÓÓSS--PPRROOCCEESSSSAAMMEENNTTOO
Figura 4.1 – Ambiente hidroinformático: software utilizado.
Nos pontos subsequentes são apresentados os detalhes do software utilizado, assim
como as características de cada um dos programas.
Se as formulações matemáticas e os correspondentes métodos numéricos utilizados no
desenvolvimento de um modelo apresentam uma importância determinante para a
fiabilidade das simulações efectuadas, a capacidade de organização e visualização da
grande quantidade de dados e de resultados obtidos é também de importância primordial
para uma correcta interpretação e análise dos cenários estabelecidos. Por outro lado, a
preparação de dados para um determinado modelo é, sem dúvida, uma das tarefas que

Capítulo 4
128
requer mais arte e engenho por parte do modelador. Assim, considerou-se pertinente a
utilização simultânea de diversos programas para a realização das tarefas de pré e
pós-processamento e criaram-se metodologias, quer de geração condicionada de malhas
não estruturadas, quer de integração da informação em Sistemas de Informação
Geográfica (SIG).
As tarefas de preparação de dados e a apresentação de resultados foram realizadas na
sua maioria com o programa Surface Modelling System (SMS) (BOSS SMS, 1996). Este
programa permite efectuar a preparação de dados, a geração de malhas para diversos
programas de cálculo da hidrodinâmica e a representação espacial de campos escalares e
vectoriais. Permite ainda definir novas variáveis, para todo o domínio, calculadas a
partir de outras variáveis existentes.
A criação de SIG é realizada recorrendo-se ao software ARCVIEW (ESRI, 1996), sendo
a digitalização da informação necessária à implementação dos modelos efectuada
através de técnicas usuais, utilizando-se o programa AUTOCAD.
Na metodologia apresentada para a geração condicionada de malhas não estruturadas foi
utilizado o programa de geração de malhas triangulares TRIANGLE (Shewchuk, 1997).
As observações das elevações da superfície livre oceânica com recurso a instrumentos
de medição colocados a bordo de satélites, como foi referido no Capítulo 2, constituem
a base para a quantificação (com um erro reduzido) das elevações a impor nas fronteiras
abertas de um determinado modelo. O programa SR95 (JPL, 1996) utiliza a informação
das observações atrás referidas para quantificar as elevações da superfície oceânica em
qualquer ponto do planeta durante o período de 1960 a 2020.
Os programas GRIDGEN e CSLICE, desenvolvidos em linguagem de programação
MATLAB, são produtos expressamente desenvolvidos para a realização de tarefas de pré
e pós-processamento de apoio ao programa POM. O primeiro permite realizar a geração
de malhas de diferenças finitas e o segundo destina-se à apresentação de resultados.
A grande quantidade de informação associada a um modelo numérico necessita de ser
organizada e estruturada de forma a permitir um acesso rápido e eficaz, quando

4.2 Ambiente hidroinformático
129
necessário. As ferramentas de gestão de bases de dados são o meio mais adequado para
a organização e gestão de dados, tendo sido utilizado o programa Microsof ACCESS.
A integração e a troca de informação entre os diferentes programas obrigou à criação de
um conjunto significativo de ferramentas utilitárias (interfaces) que permitem efectuar a
leitura, a transformação e a escrita de dados de acordo com formatos pré-estabelecidos.
Na Figura 4.1 apresenta-se, de forma esquemática, o ambiente hidroinformático
construído, sendo destacados os programas criados e os que sofreram adaptações
inovadoras. No Quadro 4.1 apresenta-se uma listagem com a designação, função, autor
e sistema operativo de cada um dos programas utilizados.
Quadro 4.1 - Programas utilizados na construção do ambiente hidroinformático.
PROGRAMA FUNÇÃO AUTOR SISTEMA OPERATIVO
TELEMAC2D Hidrodinâmica – 2DH EDF1 UNIX
RMA2 Hidrodinâmica – 2DH WES-HL2 UNIX ou WINDOWS
POM Hidrodinâmica – quasi-3D G. Mellor UNIX ou WINDOWS
RMA4 Qualidade da água – 2DH WES-HL2 UNIX ou WINDOWS
RMA4-UMQ Qualidade da água – 2DH J. Pinho UNIX ou WINDOWS
POM-UMH Hidrodinâmica – quasi-3D J. Pinho UNIX ou WINDOWS
POM-UMQ Qualidade da água – quasi-3D J. Pinho UNIX ou WINDOWS
PROCESSOS Qualidade da água J. Pinho UNIX ou WINDOWS
SMS Pré e Pós-processamento Brigham Young Univ. WINDOWS
ARCVIEW Sistemas de Informação
Geográfica
ESRI3 WINDOWS
AUTOCAD Desenho assistido por computador Autodesk WINDOWS
TRIANGLE Geração de malhas triangulares J. R. Shewchuck UNIX
SR95 Previsão de marés Schrama – Ray UNIX
GRIDGEN Geração de malhas de DF Rich Signely WINDOWS
CSLICE Pós-processamento POM Rich Signely WINDOWS
1-EDF- Eléctricité De France, 2-WES-HL – Waterways Experiment Station Hydraulic Laboratory, 3-ESRI – Environmental
Systems Research Institute.

Capítulo 4
130
4.3 Modelos hidrodinâmicos
4.3.1 Programa TELEMAC2D
4.3.1.1 Características gerais
O programa TELEMAC2D aplica-se na resolução de problemas de hidráulica marítima e
fluvial que envolvam o cálculo de escoamentos com superfície livre. Este programa
resolve as equações 2.75 a 2.77 utilizando quer o método dos elementos finitos quer o
método de diferenças finitas. As variáveis dependentes consideradas são a altura de
água e as componentes horizontais da velocidade média em cada ponto do domínio
considerado.
As equações atrás referidas, escritas em termos de coordenadas cartesianas, poderão
também ser tratadas em coordenadas esféricas. As diversas parcelas são tratadas em
dois passos de tempo intermédios (EDF, 1988): no primeiro passo são tratados os
termos advectivos das variáveis consideradas e no segundo passo os restantes termos.
No primeiro passo é utilizado o método das características e no segundo passo os
cálculos são efectuados seguindo-se uma discretização espacial por um método de
elementos finitos (Formulação de Galerkin) e uma discretização temporal
semi-implícita.
Este modelo permite ainda efectuar a definição do coeficiente de viscosidade turbulenta
a partir de um modelo do tipo k-ε (k – energia cinética turbulenta, ε - dissipação
viscosa). Os métodos numéricos utilizados são compatíveis com a modelação de
escoamentos super-críticos (EDF, 1991). As malhas de discretização espacial poderão
ser compostas por elementos triangulares ou quadrangulares lineares.
4.3.1.2 Exemplo de aplicação
O programa TELEMAC2D encontra-se instalado no Departamento de Engenharia Civil
da Faculdade de Ciências e Tecnologia da Universidade de Coimbra (DEC-FCTUC). A
versão aí instalada inclui o módulo de cálculo hidrodinâmico e o pós-processador
4.3 Modelos hidrodinâmicos
131
RUBENS (EDF, 1996). Para a realização das tarefas de preparação de dados,
necessárias a uma determinada aplicação, optou-se pela utilização dos programas de
pré-processamento disponíveis no Laboratório de Hidráulica e Recursos Hídricos do
Departamento de Engenharia Civil da Universidade do Minho (LHRH-DEC-UM)
(Figura 4.1 e Quadro 4.1), sendo as simulações efectuadas remotamente. Apresenta-se
seguidamente uma breve descrição das principais fases e procedimentos da construção
de um modelo hidrodinâmico no programa TELEMAC2D, utilizando-se, a título
ilustrativo, um modelo desenvolvido para a Foz do Rio Douro.
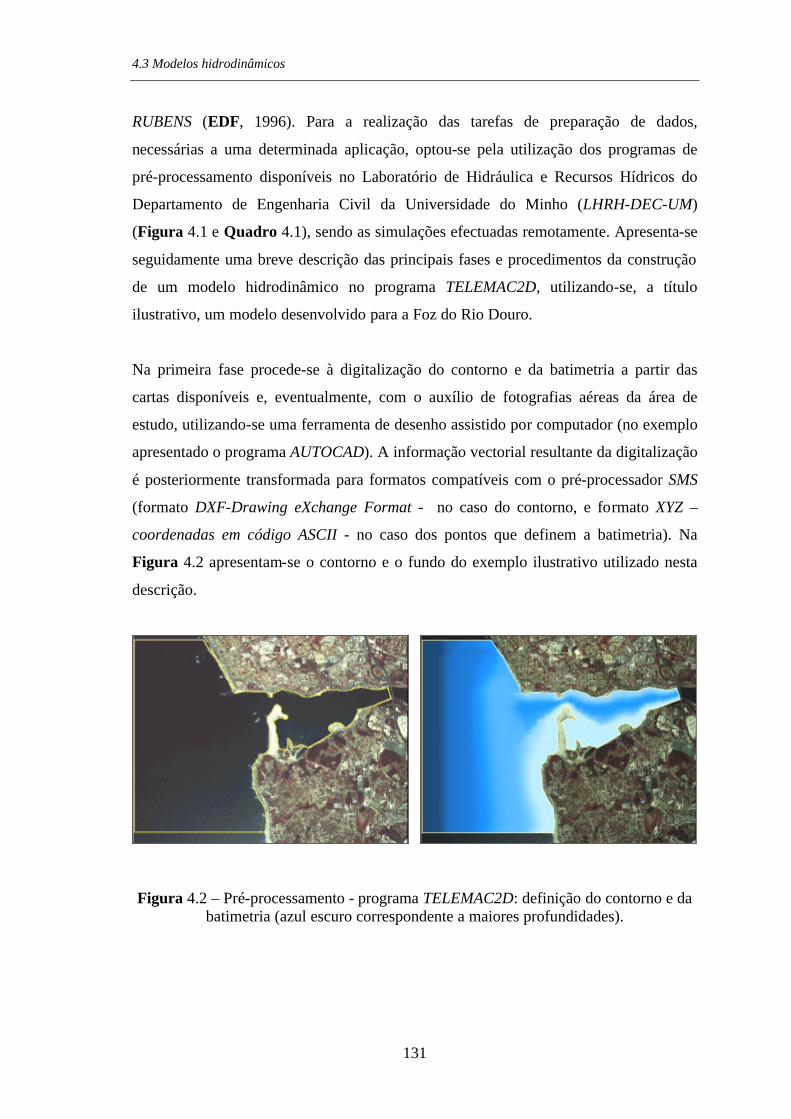
Na primeira fase procede-se à digitalização do contorno e da batimetria a partir das
cartas disponíveis e, eventualmente, com o auxílio de fotografias aéreas da área de
estudo, utilizando-se uma ferramenta de desenho assistido por computador (no exemplo
apresentado o programa AUTOCAD). A informação vectorial resultante da digitalização
é posteriormente transformada para formatos compatíveis com o pré-processador SMS
(formato DXF-Drawing eXchange Format - no caso do contorno, e formato XYZ –
coordenadas em código ASCII - no caso dos pontos que definem a batimetria). Na
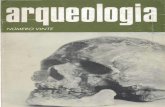
Figura 4.2 apresentam-se o contorno e o fundo do exemplo ilustrativo utilizado nesta
descrição.
Figura 4.2 – Pré-processamento - programa TELEMAC2D: definição do contorno e da batimetria (azul escuro correspondente a maiores profundidades).

Capítulo 4
132
A geração da malha de elementos finitos em que é discretizado o domínio é realizada no
programa SMS. Na Figura 4.3 apresenta-se uma malha composta por elementos
triangulares lineares.
Figura 4.3 – Pré-processamento - programa TELEMAC2D: malha de elementos finitos gerada no programa SMS.
A informação relativa à malha de elementos finitos gerada no programa SMS é
transformada para um formato de leitura do programa TELEMAC2D. O programa
utilitário em que é efectuada a transformação cria também um ficheiro com a
informação necessária à definição dos nós das fronteiras e tipo de condições fronteira a
impor nesses nós. Os valores das variáveis nas fronteiras abertas são estabelecidos
através de palavras-chave ou são programadas em subrotinas específicas. Nesta fase
estão preparados os ficheiros correspondentes à geometria, condições de fronteira e
caracterização do fundo. Resta apenas definir, com o auxílio de um processador de
texto, um ficheiro com a definição das palavras-chave, através das quais são
estabelecidos os valores de parâmetros necessários ao funcionamento do modelo,
incluindo, entre outros: os nomes dos ficheiros envolvidos, as condições iniciais, o
passo de tempo, a duração da simulação, os instantes de escrita dos resultados e as

4.3 Modelos hidrodinâmicos
133
variáveis que se pretendem analisar. Após a transferência dos ficheiros de dados do
LHRH-DEC-UM para o DEC-FCTUC procede-se à execução do programa. Finalizada a
execução, os resultados poderão ser analisados no DEC-FCTUC, utilizando-se o
pós-processador aí instalado (RUBENS), ou procedendo à conversão e transferência do
ficheiro de resultados, de forma a que seja possível o seu processamento no programa
SMS. Esta conversão é realizada por um dos programas utilitários desenvolvidos no
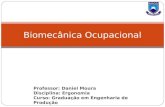
âmbito deste trabalho. Na Figura 4.4 são apresentados, a título ilustrativo, resultados do
campo de velocidades, do módulo da velocidade e de linhas de corrente num
determinado instante da simulação efectuada no programa TELEMAC2D.
Figura 4.4 – Pós-processamento – programa TELEMAC2D: a) campo de velocidades; b) módulo da velocidade; c) linhas de corrente.
c)
a)
b)

Capítulo 4
134
4.3.2 Programa RMA2
4.3.2.1 Características gerais
O programa RMA2 (WES-HL, 1996), baseado num método de elementos finitos,
permite a obtenção de soluções em regime permanente ou variável, com o
estabelecimento de condições de fronteira variáveis ao longo do tempo. As soluções são
obtidas num determinado número de instantes, nos pontos nodais da malha de
elementos finitos. Apresenta como principal limitação a impossibilidade de resolução de
escoamentos super-críticos. Esta limitação advém do método numérico empregue na
resolução das equações de continuidade e conservação da quantidade de movimento.
As Eq.s 2.75 a 2.77 são resolvidas por um método de elementos finitos, usando-se a
técnica dos resíduos pesados de Galerkin. Os elementos para a discretização espacial
poderão ser triangulares e/ou quadrangulares de seis e oito nós, respectivamente. As
funções de forma são quadráticas no caso das velocidades e lineares para a
profundidade. A integração espacial é efectuada pelo método de Gauss. As derivadas
temporais são discretizadas por uma aproximação de diferenças finitas. O método é
totalmente implícito, sendo os sistemas de equações resolvidos pelo método de
Newton-Raphson.
4.3.2.2 Exemplos de aplicação
A preparação de dados para a aplicação de modelos utilizando o programa RMA2 é
auxiliada pelo programa SMS. Este pré-processador permite a utilização directa de
informação cartográfica digitalizada através da sua importação em formato DXF, como
foi referido anteriormente. A definição do contorno e da batimetria necessários à
implementação de um determinado modelo torna-se assim muito simples no caso dessa
informação se encontrar disponível no formato indicado. As condições a impor nas
fronteiras abertas, correspondentes a simulações de regimes permanentes ou variáveis,
são introduzidas utilizando-se um interface gráfico disponível no programa SMS.

4.3 Modelos hidrodinâmicos
135
A discretização espacial de domínios de geometria complexa, torna-se mais simples no
caso de utilização conjunta de diferentes tipos de elementos. O programa RMA2
apresenta esta possibilidade permitindo, como já foi referido, a utilização simultânea de
elementos triangulares e quadrangulares numa mesma malha. Este programa permite
ainda a modelação de regiões intertidais, ou de uma forma geral, zonas ou situações
cuja hidrodinâmica implique a ocorrência de regiões que apenas se encontram
inundadas em determinados períodos de tempo (regiões normalmente designadas por
regiões cobre-descobre).
Apresentam-se a seguir dois exemplos que ilustram as diversas fases de
desenvolvimento de um modelo hidrodinâmico utilizando o programa RMA2. Em
ambos os exemplos as condições hidrodinâmicas implicam a ocorrência de regiões
cobre-descobre. O primeiro exemplo (Figura 4.5) refere-se a um trecho do Rio Este
(afluente do rio Ave), em que se procede à simulação das condições de escoamento em
situação de cheia. O domínio foi discretizado utilizando uma malha de elementos
triangulares, sendo impostas como condições de fronteira a entrada de um caudal a
montante e o nível da superfície livre a jusante.
Figura 4.5 – Pré-processamento - programa RMA2: definição do contorno, batimetria e malha de elementos finitos num trecho do Rio Este.
CONTORNO E BATIMETRIA MALHA DE ELEMENTOS FINITOS

Capítulo 4
136
O contorno apresentado delimita toda a região cuja topografia foi levantada. O facto de
a correspondente malha de elementos finitos apresentar um número de elementos
excessivo (ver resultados a seguir apresentados) não torna o cálculo desnecessariamente
dispendioso, uma vez que só os elementos inundados são considerados activos durante
as simulações efectuadas.
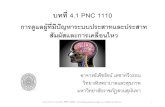
Na Figura 4.6 são apresentados, a título ilustrativo alguns dos resultados obtidos para
áreas inundadas e módulos das velocidades usando o pós-processador SMS.
Figura 4.6 – Pós-processamento – programa RMA2: áreas inundadas e módulos da velocidade para diferentes caudais de cheia num trecho do Rio Este.
Caudal de cheia 225 m3/s – Área inundada Caudal de cheia 500 m3/s – Área inundada
Caudal de cheia 225 m3/s–Velocidade (módulo) Caudal de cheia 500 m3/s–Velocidade (módulo)

4.3 Modelos hidrodinâmicos
137
No segundo exemplo, referente à foz do Rio Cávado, o domínio apresenta uma
geometria complexa, tendo a sua discretização sido realizada com uma malha composta
por elementos triangulares e quadrangulares. As condições de fronteira impostas foram
as elevações da superfície livre na fronteira oceânica e o caudal do Rio Cávado a
montante. Na Figura 4.7 apresentam-se o contorno, a batimetria e a malha utilizada.
Figura 4.7 – Pré-processamento - programa RMA2: definição do contorno, batimetria e malha de elementos finitos na zona de jusante do estuário do Rio Cávado.
Na Figura 4.8 são apresentados alguns dos resultados obtidos com o programa SMS
para a simulação hidrodinâmica efectuada. Para além da representação dos campos
escalares e vectoriais referidos nos exemplos ilustrativos, o programa SMS permite
ainda a apresentação da evolução temporal de variáveis escalares (incluindo
componentes das velocidades) sob a forma gráfica. Este programa permite também a
produção de animações, que se revelam muito úteis na análise de simulações da
hidrodinâmica em regimes variáveis.
MALHA DE ELEMENTOS FINITOS CONTORNO E BATIMETRIA

Capítulo 4
138
Figura 4.8 – Pós-processamento – programa RMA2: velocidades, superfície livre e linhas de corrente na zona de jusante do estuário do Rio Cávado.
VELOCIDADE (Enchente) VELOCIDADE (Vazante)
LINHAS DE CORRENTE ELEVAÇÃO DA SUPERFÍCIE LIVRE

4.3 Modelos hidrodinâmicos
139
4.3.3 Programa POM
4.3.3.1 Características gerais
O programa POM (Princeton Ocean Model) foi desenvolvido para a modelação de
estuários e zonas costeiras, envolvendo escalas espaciais com desenvolvimentos da
ordem de 1 a 100 km e escalas temporais com durações entre um período de maré até
algumas dezenas de dias. A descrição geral do programa é apresentada em Mellor
(1998), estando os detalhes relativos aos esquemas de diferenças finitas utilizados
contidos no seu código FORTRAN.
O programa resolve uma versão simplificada das equações 2.117 a 2.123 utilizando
coordenadas sigma na direcção vertical e coordenadas ortogonais curvilíneas na
direcção horizontal (com um arranjo do tipo Arakawa C), conforme se apresenta na
Figura 4.9. A simplificação atrás referida é efectuada na definição dos termos
correspondentes aos gradientes de pressão e nos termos correspondentes à difusão
horizontal. No programa POM, a formulação utilizada para os referidos termos
apresenta a seguinte forma:
∫
∂∂
∂∂
−∂∂
+≡0
0
2
1 σσ
σρσρ
ρ∂∂η
dxH
HxgH
xgHDP
(4.1)
∫
∂∂
∂∂
−∂∂
+≡0
0
2
2 σσ
σρσρ
ρ∂∂η
dyH
HygH
ygHDP
(4.2)
∂∂
+∂∂
∂∂
+
∂∂
∂∂
≡xv
yu
hAyx
uAh
xDF MM21
(4.3)
∂∂
∂∂
+
∂∂
+∂∂
∂∂
≡yv
Ahyx
vyu
hAx
DF MM 22 (4.4)
Capítulo 4
140
O programa inclui um sub-modelo de turbulência para o cálculo dos coeficientes de
difusão turbulenta verticais (Mellor e Yamada, 1982). Os coeficientes de difusão
turbulenta horizontais são calculados a partir da fórmula de Smagorinsky:
21
222
2
∂∂
+
∂∂
+∂∂
+
∂∂
∆∆=yv
yu
xv
xu
yxCAM (4.5)
Os valores do coeficiente de Smagorinsky, C, adoptados variam entre 0,10 e 0,20. As
vantagens de utilização desta fórmula relacionam-se com o facto de C ser adimensional
e dos coeficientes AM diminuírem à medida que aumenta a resolução e diminuem os
gradientes de velocidade.
O método de discretização temporal na direcção horizontal é explícito, enquanto que na
direcção vertical é implícito. Assim, é possível a utilização de resoluções elevadas junto
das fronteiras na direcção vertical sem qualquer restrição em termos de passo de tempo.
O algoritmo de cálculo do programa utiliza a separação de modos. O modo externo
corresponde a um modelo bidimensional, integrado na vertical, com o passo de tempo
limitado pela condição de estabilidade de Courant-Friedrich-Lewy (CFL), sendo
utilizado para o cálculo das elevações da superfície livre e das componentes horizontais
da velocidade média na vertical (associadas à propagação de ondas gravíticas
superficiais de elevada celeridade).
A formulação matemática do modelo bidimensional (2DH) é traduzida pelas equações a
seguir apresentadas, as quais assumem uma forma idêntica às das equações 2.75 a 2.77
e resultam da integração vertical das equações fundamentais da Mecânica dos Fluidos
em coordenadas sigma.
0=++y
VHx
UHt ∂
∂∂
∂∂∂η
(4.6)

4.3 Modelos hidrodinâmicos
141
( ) ( )
∫ ∫−
∂∂
∂∂
−∂∂
−
−+−+−=+−−++
0
1
0
0
2
10~
σσσ
σρ
σρ
ρ
∂∂η
∂∂
∂∂
∂∂
ddxH
xH
gH
Gwuwux
gHfVHFy
UVHxHU
tUH
xx
(4.7)
( ) ( )
∫ ∫−
∂∂
∂∂
−∂∂
−
−+−+−=+−−++
0
1
0
0
2
10~
σσσ
σρ
σρ
ρ
∂∂η
∂∂
∂∂
∂∂
ddyH
yH
gH
Gwvwvy
gHfUHFyHV
xUVH
tVH
yy
(4.8)
Os termos ( )0wu e ( )0wv correspondem às componentes das tensões induzidas pelo
vento e os termos ( )1−wu e ( )1−wv representam as tensões no fundo.
As parcelas xF~ e yF~ representam as componentes da difusão horizontal, sendo dadas
por:
∂∂
+∂∂
∂∂
+
∂∂
∂∂
=xV
yU
Ahyx
UAh
xF MMx 2~
(4.9)
∂∂
∂∂
+
∂∂
+∂∂
∂∂
=yV
Ahyx
VyU
Ahx
F MMy 2~ (4.10)
As barras representam médias verticais das respectivas variáveis.
Os termos xG e yG , normalmente designados por termos dispersivos, são quantificados
de acordo com as seguintes expressões:
xxx FyHuv
xHu
Fy
UVHxHU
G +∂
∂−
∂∂
−−∂
∂+
∂∂
=22 ~
(4.11)
yyy FyHv
xHuv
FyHV
xUVH
G +∂
∂−
∂∂
−−∂
∂+
∂∂
=22 ~
(4.12)

Capítulo 4
142
As parcelas xF e yF são calculadas a partir de expressões análogas às das equações
4.9 e 4.10, respectivamente mas envolvendo as variáveis tridimensionais u, v, e AM. No
caso dos coeficientes AM serem constantes segundo a vertical, as parcelas “F” nas Eq.s
4.11 e 4.12 anulam-se. No entanto, é considerada a variabilidade vertical da difusão
horizontal, que poderá ocorrer quando, como é o caso, os coeficientes de difusão são
quantificados a partir da expressão de Smagorinsky (Eq. 4.5).
No modo interno são calculadas as variáveis tridimensionais, sendo portanto mais
exigente em termos computacionais mas utilizando um passo de tempo menos restritivo
do que o utilizado no modo externo (limitado pela condição de estabilidade de CFL).
x
y∆x∆y
H, η(I,J)V(I,J)
U(I,J)
1
2
3
K
K+1
w(I,J,K)T,S,ρ(I,J,K)
σ = 0
σ = -1
v(I,J,K)
u(I,J,K)τx(I,J,K)
τy(I,J,K)
τbx τby
KB
Figura 4.9 – Malha de diferenças finitas e localização das variáveis – Programa POM .
Na Figura 4.10 apresenta-se um esquema que ilustra a técnica de integração temporal
utilizada nos modos externo e interno.

4.3 Modelos hidrodinâmicos
143
Considere-se que todas as variáveis são conhecidas nos instantes tn-1 e tn. Os integrais
que envolvem os termos advectivos e baroclínicos, assim como os valores das tensões
no fundo calculados no modo interno, são fornecidos ao modo externo, sendo o seu
valor mantido constante durante o intervalo de tempo tn<t<tn+1.
MODO EXTERNO
t
Ν ∆t
tn-1 tn tn+1
∆t
MODO INTERNO
Figura 4.10 – Representação do esquema de integração dos modos externo e interno do programa POM.
No modo externo prossegue-se com a integração, utilizando o passo de tempo ∆t até se
atingir o instante tn+1. No modo externo são calculadas as médias temporais (no
intervalos tn-1<t<tn e tn<t<tn+1) das componentes da velocidade média vertical. Como os
dois modos apresentam erros de truncatura diferentes, os integrais verticais das
velocidades no modo interno podem divergir ligeiramente das componentes da
velocidade média calculadas no modo externo em cálculos que envolvam longos
períodos de integração. Por esta razão, as componentes horizontais da velocidade do
modo interno são ajustadas de forma a que o seu integral vertical coincida com as
médias temporais calculadas no modo externo. Os gradientes da elevação da superfície
livre utilizados no modo interno são definidos a partir da média dos valores médios
temporais das elevações da superfície livre, calculados no modo externo durante os
intervalos tn-1<t<tn e tn<t<tn+1. Conforme se apresentará mais adiante, o procedimento
anterior permite que o passo de tempo a utilizar no modo interno seja limitado pela
condição de Courant-Friedrich-Lewy associada à celeridade baroclínica que é menos
restritiva que a correspondente condição imposta pela celeridade barotrópica. O cálculo

Capítulo 4
144
das variáveis tridimensionais (modo interno) é separado em dois passos de tempo: num
são considerados os termos relativos à advecção e à difusão horizontal e no outro é
considerada a difusão vertical. Este último é calculado com um esquema implícito,
enquanto que o primeiro é calculado de acordo com um esquema explícito.
Considerando uma equação genérica de transporte de um escalar φ , tem-se:
( ) ( )
∂∂
∂∂
++−=∂
∂σφ
σφφ
φVK
HDifAdv
tD 1
(4.13)
Adv(φ ) e Dif(φ ) representam os termos advectivos e difusivos, respectivamente.
Assim, de acordo com a metodologia referida, a solução é obtida em dois passos
distintos. No primeiro passo os termos advectivos e difusivos são diferenciados de
acordo com a expressão:
( ) ( )1111
2
~−
−−+
+−=∆
− nnnnn
DifAdvt
HHφφ
φφ
(4.14)
sendo o segundo passo, correspondente ao termo de difusão vertical, diferenciado de
acordo com:
∂
∂∂∂
=∆− +
+
+++
σφ
σφφ 1
1
111 12
~ n
Vn
nnn
KHt
HH
(4.15)
Os detalhes dos cálculos relativos à última expressão são apresentados em Mellor
(1998). Na técnica de diferenciação temporal utilizada (Leap frog) é normal que os
resultados em passos de tempo ímpares divirjam ligeiramente dos resultados
correspondentes a passos de tempo pares. Para atenuar este efeito, é aplicada uma
suavização temporal aos resultados encontrados. Essa suavização é efectuada em todos
os passos de tempo, utilizando-se a seguinte expressão:
( )11 22
−+ +−+= nnnS φφφ
αφφ
(4.16)

4.3 Modelos hidrodinâmicos
145
onde Sφ é o valor da variável após aplicação do filtro anterior. A constante α é
normalmente considerada igual a 0,05. Com o objectivo de ilustrar o efeito da aplicação
do filtro anteriormente referido apresenta-se na Figura 4.11, sob a forma de gráfico, a
solução da equação ( )21 tydtdy −+= com um valor inicial y(0)=0.5, obtida com um
esquema de diferenças finitas do tipo leap frog. São representadas, para além da solução
analítica, a solução numérica sem aplicação do filtro e a mesma solução com a
aplicação de um filtro do tipo anteriormente apresentado.
0,80
0,83
0,85
0,88
0,90
0,25 0,26 0,27 0,28 0,29 0,30
t
y
Leap frog s/ suavização Sol. analítica Leap frog c/ suavização
0,00
0,04
0,08
0,00 0,20 0,40 0,60 0,80 1,00t
Err
o ab
solu
to
Leap frog s/ suavização Leap frog c/suavização
Figura 4.11 – Soluções da equação diferencial ( )21 tydtdy −+= com um valor inicial y(0)=0.5. Efeito da aplicação de um filtro de suavização temporal: a) soluções
numéricas e solução analítica; b) erro absoluto das soluções numéricas com e sem suavização.
a)
b)

Capítulo 4
146
A condição de estabilidade de CFL das equações do modo externo traduz-se na seguinte
limitação para o passo de tempo (∆te):
21
22max
112
1−
++
≤∆yxUgh
te δδ
(4.17)
em que Umax é a velocidade máxima esperada e δx e δy são os espaçamentos (mínimos),
segundo a direcção x e y, respectivamente, na malha de diferenças finitas.
O modo interno, como já foi referido, apresenta uma limitação menos restritiva para o
passo de tempo (∆ti), definida pela seguinte expressão:
21
22max
112
1−
++
≤∆yxUc
ti δδ
(4.18)
em que c é a celeridade das ondas gravíticas internas. Em condições típicas de zonas
costeiras a relação ∆ti/∆te situa-se no intervalo 40 a 80.
Existem outros limites para o passo de tempo a utilizar no modo interno, impostos pelas
condições de difusão horizontal da quantidade de movimento, de escalares e pelos
termos de Coriolis, não sendo estes, todavia, tão restritivos como os que são obtidos
pelas expressões anteriormente apresentadas.
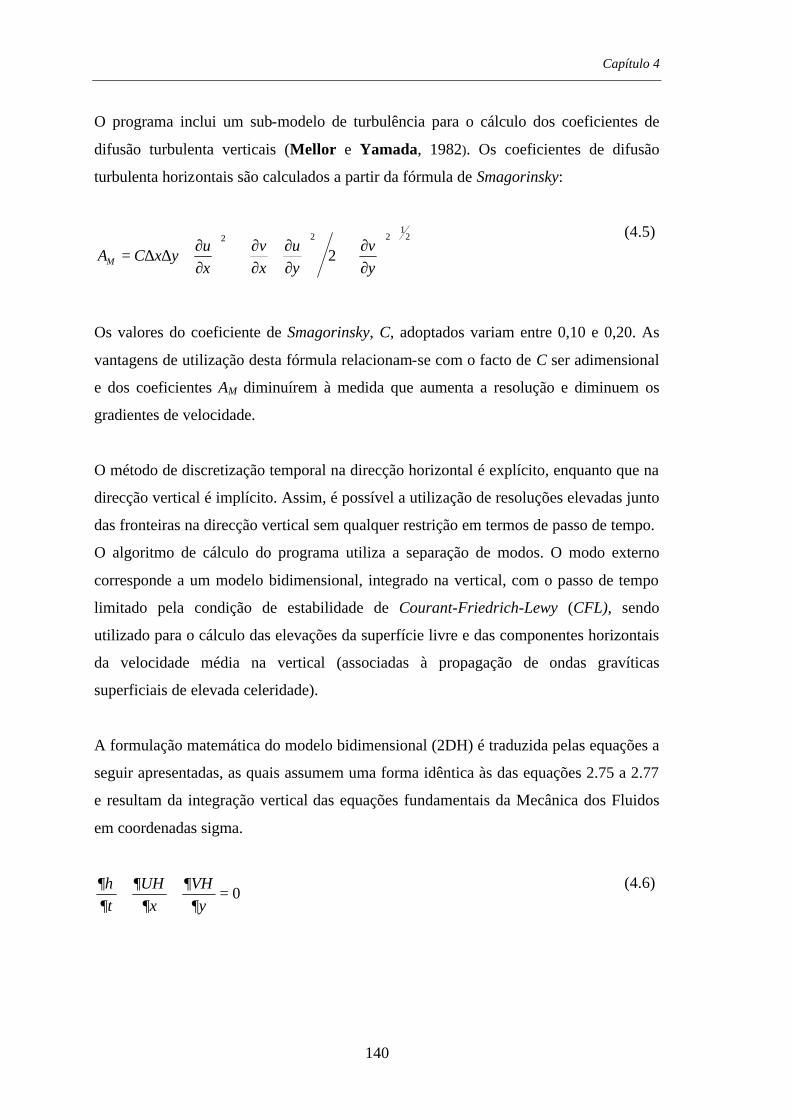
A sequência de cálculo no programa POM encontra-se representada pelo fluxograma da
Figura 4.12, onde se indicam as principais subrotinas de cálculo. No programa
principal é efectuada a inicialização de todas as variáveis e parâmetros, sendo ainda
estabelecidas as condições iniciais. Segue-se o ciclo de integração temporal
correspondente ao modo interno. Para cada um dos ciclos de integração (II=1,IEND), a
sequência dos cálculos é a seguinte:
- Na subrotina ADVCT são calculados os termos advectivos e os termos relativos à
difusão horizontal das componentes horizontais da velocidade. Os termos calculados

4.3 Modelos hidrodinâmicos
147
são integrados na vertical e posteriormente utilizados no início dos ciclos de
integração do modo externo. Estes termos são calculados em cada um dos ciclos do
modo interno e actualizados durante o ciclo de integração do modo externo. Nesta
subrotina são calculados a partir dos valores das velocidades médias (na vertical). A
actualização não necessita de ser efectuada em todos os ciclos do modo externo. A
subrotina ADVAVE, onde são calculados os termos similares no modo externo,
poderá ser chamada em intervalos de tempo (múltiplos de ∆te) previamente
definidos, mantendo-se o cálculo estável.
- Os cálculos dos integrais verticais (baroclínicos), envolvendo a massa volúmica, são
realizados na subrotina BAROPG.
- Segue-se o ciclo de integração associado ao modo externo, cuja sequência de
cálculo será apresentada mais adiante, onde se calculam as velocidades médias
(verticais) e as elevações da superfície livre, utilizando-se os valores da massa
volúmica calculada no modo interno. O número de passos de integração neste ciclo
é definido pelo quociente ∆ti/∆te (ISPLIT), que deverá ser um número inteiro.
- As componentes horizontais da velocidade obtidas no modo interno são ajustadas de
forma a que o integral vertical dessas componentes coincida com as médias
temporais das componentes da velocidade calculadas no modo externo.
- Na subrotina VERTVL é efectuada a integração da equação de continuidade, de
forma a calcular a componente vertical da velocidade em coordenadas sigma. Esta
velocidade vertical transformada é normal às superfícies definidas por coordenadas
sigma constantes. Após este cálculo são estabelecidas as condições de fronteira para
a componente vertical da velocidade, através de chamada à subrotina BCOND.
- A subrotina ADVQ calcula a Eq. 4.14 para as quantidades q2 e q2l do sub-modelo de
turbulência utilizado para a quantificação dos coeficientes de difusão verticais. Na
subrotina PROFQ é resolvida a Eq. 4.15 para as mesmas quantidades, efectuando-se

Capítulo 4
148
seguidamente a quantificação das condições de fronteira, na subrotina BCOND, para
as grandezas do modelo de turbulência.
- Os cálculos que se seguem, referentes aos escalares temperatura e salinidade, são
efectuados nas subrotinas ADVT (resolução da Eq. 4.14) e PROFT (resolução da Eq.
4.15). As condições de fronteira para as grandezas anteriores são mais uma vez
estabelecidas na subrotina BCOND.
- Finalmente, são chamadas as subrotinas ADVU e ADVV, onde se efectuam os
cálculos dos termos advectivos (incluindo ainda os termos de Coriolis e de
curvatura) e de difusão horizontal da velocidade, e as subrotinas PROFU e PROFV
onde se calculam os termos relativos à difusão vertical. Na subrotina BCOND são
definidas as condições de fronteira das componentes horizontais da velocidade no
modo interno.
O modo externo apresenta a seguinte sequência de cálculos:
- Inicia-se com o cálculo das elevações da superfície livre, sendo posteriormente
definidas as condições de fronteira relativas a esta variável, calculadas na subrotina
BCOND.
- Os termos advectivos, juntamente com os termos de difusão horizontal calculados a
partir das velocidades médias horizontais, são actualizados na subrotina ADVAVE
em intervalos de tempo múltiplos do passo de integração do modo externo, como foi
referido anteriormente.
- Segue-se o cálculo das velocidades médias horizontais e das correspondentes
médias temporais.
- O ciclo de cálculos do modo externo finaliza com a definição das condições de
fronteira relativas às velocidades médias na subrotina BCOND.
O programa é finalizado após a escrita de resultados.
4.3 Modelos hidrodinâmicos
149
ADVUADVV
PROFUPROFV
BCOND(3)
-Vel. vertical (σ)
-Cond. fronteira: w
BCOND(1)
ADVCTBAROPG
VERTVLBCOND(5)
ADVQ(Q2)ADVQ(Q2L)
PROFQBCOND(6)
ADVT(T)ADVT(S)
PROFT(T)PROFT(S)BCOND(4)
ADVAVE
BCOND(2)
INÍCIO
FIM
DEFINIÇÃO DE PARÂMETROSMALHA
CONDIÇÕES INICIAIS
CICLOMODO INTERNO
II=1, IEND
RESULTADOS
-Adv. e difusão: u e v
-Massa volúmica
CICLOMODO EXTERNO
IE=1, ISPLIT
AJUSTA u e v(Integral vertical de u e v = médiada velocidade do modo externo)
ELEVAÇÃO DA SUPERFÍCIELIVRE
VELOCIDADES U E V
MÉDIAS TEMPORAIS DEU E V
-Adv. e dif. hor.: Q2 e Q2L-Dif. vert.:Q2,Q2L-Cond. fronteira Q2 e Q2L
-Adv. e dif. hor.:T-Adv. e dif. hor.:S-Dif. vert.:T-Dif. vert.:S-Cond. front.: T,S
-Adv. e dif. hor.:u-Adv. e dif. hor.:v-Dif. vert.:u-Dif. vert.:v-Cond. front.: u,v
-Cond. fronteira: Elevação dasuperfície livre
-Adv. e difusão: U e V
-Cond. fronteira: U e V
Figura 4.12 – Fluxograma do algoritmo do programa POM (adaptado de Mellor, 1998).

Capítulo 4
150
4.3.3.2 Exemplos de aplicação
Uma das dificuldades de utilização do programa POM, em aplicações reais, prende-se
com a preparação de dados e a análise de resultados. A malha de diferenças finitas, os
parâmetros relativos a cada um dos modelos, assim como as respectivas condições de
fronteira, deverão ser directamente definidos no código FORTRAN. Existem, no
entanto, algumas ferramentas desenvolvidas em ambiente MATLAB que auxiliam a
execução das tarefas atrás mencionadas. Para a geração da malha de diferenças finitas
poderá utilizar-se o programa GRIDGEN. A sequência de preparação da malha de
diferenças finitas, para a aplicação do programa à Foz do Rio Douro, é ilustrada na
Figura 4.13. Numa primeira fase deverão ser definidas duas matrizes: uma com um
conteúdo correspondente às coordenadas dos pontos da linha de costa e a outra com as
coordenadas dos pontos que permitam definir a batimetria da região a modelar. Estes
dados são guardados num formato adequado para posterior leitura em ambiente
MATLAB (o contorno é definido pela linha azul da Figura 4.13-b) e a batimetria é
conhecida no interior do rectângulo representado na mesma figura). Seguidamente
define-se o contorno da malha e o número de divisões segundo cada uma das direcções
(Figura 4.13 - c), d)). O programa permite ainda adaptar o espaçamento de forma a
criar zonas em que a malha se apresente mais refinada (Figura 4.13 – e)). Finalmente, o
programa determina, por interpolação da batimetria fornecida, a profundidade em cada
um dos nós e define um ponteiro que indica se os pontos se localizam na água ou em
terra (Figura 4.13-f)).
A informação com a geometria da malha é guardada num ficheiro que poderá ser lida
posteriormente no programa POM. O pós-processamento de resultados poderá ser
efectuado utilizando-se duas ferramentas distintas: o programa SMS e o programa
CSLICE.
Foram desenvolvidos alguns programas utilitários para permitir efectuar a análise de
resultados através do programa SMS. Na Figura 4.14 apresentam-se alguns resultados
relativos ao modelo da Foz do Rio Douro.

4.3 Modelos hidrodinâmicos
151
Figura 4.13 – Geração de malhas de diferenças finitas – Programa GRIDGEN.
a) – Foz do Rio Douro b) – Linha de costa e batimetria
c) – Contorno da malha d) – Malha de DF
e) – Adaptação dos espaçamentos f) – Profundidades nos nós da malha

Capítulo 4
152
Velocidades – Enchente (camada superficial)
Velocidades – Vazante (camada superficial)
Velocidades – Enchente (corte vertical)
Velocidades – Vazante (corte vertical)
Figura 4.14 – Resultados do programa POM processados pelo programa SMS.
O programa CSLICE permite efectuar a representação em planta e em cortes verticais
das variáveis escalares e efectua também a representação dos campos vectoriais em
planos horizontais. Para utilização deste pós-processador, o programa POM sofreu os
desenvolvimentos necessários de forma a que os resultados sejam guardados num
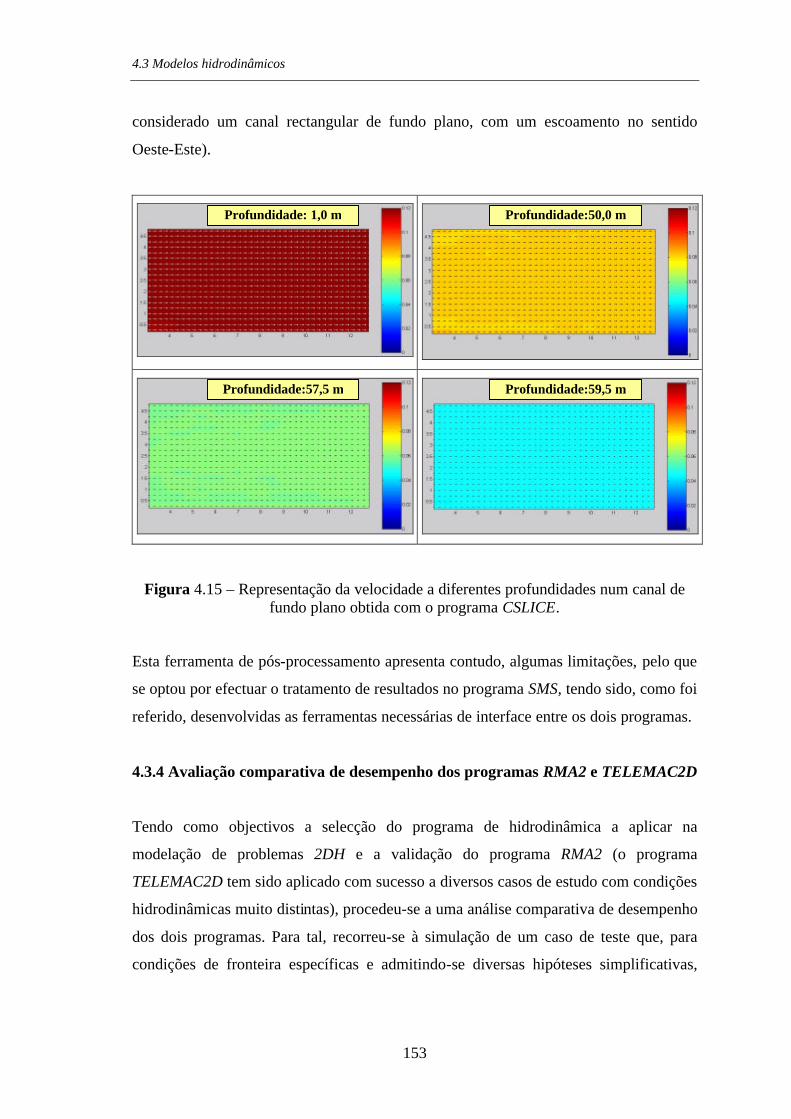
formato que permita a sua leitura no programa CSLICE. Na Figura 4.15, apresentam-se
alguns dos resultados de velocidades para diferentes profundidades num caso de teste (é
4.3 Modelos hidrodinâmicos
153
considerado um canal rectangular de fundo plano, com um escoamento no sentido
Oeste-Este).
Figura 4.15 – Representação da velocidade a diferentes profundidades num canal de fundo plano obtida com o programa CSLICE.
Esta ferramenta de pós-processamento apresenta contudo, algumas limitações, pelo que
se optou por efectuar o tratamento de resultados no programa SMS, tendo sido, como foi
referido, desenvolvidas as ferramentas necessárias de interface entre os dois programas.
4.3.4 Avaliação comparativa de desempenho dos programas RMA2 e TELEMAC2D
Tendo como objectivos a selecção do programa de hidrodinâmica a aplicar na
modelação de problemas 2DH e a validação do programa RMA2 (o programa
TELEMAC2D tem sido aplicado com sucesso a diversos casos de estudo com condições
hidrodinâmicas muito distintas), procedeu-se a uma análise comparativa de desempenho
dos dois programas. Para tal, recorreu-se à simulação de um caso de teste que, para
condições de fronteira específicas e admitindo-se diversas hipóteses simplificativas,
Profundidade: 1,0 m Profundidade:50,0 m
Profundidade:57,5 m Profundidade:59,5 m

Capítulo 4
154
apresenta uma solução analítica conhecida. Posteriormente, procede-se à comparação da
solução analítica com as soluções numéricas obtidas pelos dois programas.
4.3.4.1 Caracterização do caso de teste - bacia rectangular fechada numa extremidade
Pretendeu-se determinar as elevações e o campo de velocidades resultante numa bacia
rectangular fechada numa das extremidades e sujeita a uma elevação da superfície livre
(função periódica) na extremidade oposta, conforme se apresenta na Figura 4.16.
Planta
x=0
Nó Oeste Nó intermédio Nó Este
Alçado
Lb= 800,0 m
h=5,0 m T= 1000 s , a = 0,1 m
a
( )t cosa ωη =
Figura 4.16 - Geometria da bacia rectangular - caso de teste.
A solução analítica deste problema poderá ser obtida, desde que se verifiquem as
seguintes condições:
- A amplitude da onda seja pequena quando comparada com a profundidade;
- A profundidade seja pequena em relação ao comprimento de onda
(profundidade/comprimento de onda < 0,05);

4.3 Modelos hidrodinâmicos
155
- As acelerações verticais sejam desprezáveis e, portanto, a distribuição de
pressões possa ser considerada hidrostática;
- As forças de atrito internas e superficiais, assim como as acelerações de Coriolis
e de inércia convectivas, sejam desprezáveis.
Nestas condições, as equações da quantidade de movimento e da continuidade poderão
ser escritas da seguinte forma, admitindo que o movimento ocorre apenas segundo a
direcção x:
( )0=+
+xu
ht
h∂∂
∂η∂
(4.19)
( )0=
++
xh
gtu
∂η∂
∂∂
(4.20)
A solução analítica do sistema de equações anterior é dada por:
( )( ) ( )[ ]αωη += tkkx
cosLbcos
cosa
(4.21)
( )( ) ( )[ ]αω += tkkx
hu sin
Lbcossinac
(4.22)
com as seguintes condições:
tu 0para 0 == (4.23)
( ) Lb= para cosa xtωη = (4.24)
onde, η é a elevação da superfície livre [m];
a é a amplitude da função periódica na fronteira aberta [m];
T é o período da função periódica na fronteira aberta [s];
ω π= 2 T é a frequência angular da função periódica na fronteira aberta [s-1];
gH=c é a celeridade [m s-1];

Capítulo 4
156
k = ω c é o número de onda [m-1];
α é o atraso da função periódica [s];
h é a profundidade da água em equilíbrio [m].
4.3.4.2 Condições de simulação
Para se conseguir uma aproximação razoável entre as condições impostas para a
obtenção da solução analítica e as condições em que se obtêm as soluções numéricas,
foram considerados coeficientes de viscosidade nulos ou muito pequenos.
Adicionalmente poder-se-iam, no caso do programa TELEMAC2D, desprezar os termos
convectivos (este programa tem como opção a consideração ou não de vários conjuntos
de parcelas que figuram nas equações a resolver). Esta possibilidade não é no entanto
considerada razoável, já que não é possível linearizar simultaneamente a equação da
continuidade. Por outro lado, desta forma, são resolvidos os mesmos modelos
matemáticos pelos dois programas em análise. Salienta-se ainda o facto de a amplitude
adoptada para a função periódica da fronteira aberta ser pequena, o que diminui a
importância dos termos de aceleração convectiva do modelo global.
Uma vez que não é possível utilizar o mesmo tipo de elemento nos dois modelos optou-
se pela discretização do domínio em elementos quadrangulares de dimensões
semelhantes. A diferença na discretização implicará necessariamente a obtenção de
resultados ligeiramente diferentes.
Apresentam-se na Figura 4.17 as malhas de elementos finitos correspondentes à
discretização do domínio em análise para cada um dos programas. Os cálculos para
obtenção da solução numérica em cada um dos dois programas analisados, foram
efectuados a partir da situação de repouso (condições iniciais: cota da superfície livre
constante e velocidades nulas em todo o domínio). Nestas condições pode avaliar-se o
efeito das condições iniciais no desenvolvimento do cálculo. O período de simulação
considerado em cada um dos programas tem uma duração que permite ultrapassar a
situação transitória. O valor da amplitude considerada para a função periódica imposta
na extremidade aberta da bacia foi de 0,1 m e o período 1000 s. O passo de tempo

4.3 Modelos hidrodinâmicos
157
adoptado nos dois programas foi de 25 s (a este intervalo de tempo correspondem
valores do número de Courant inferiores a 2).
Malha de elementos finitos: Programa TELEMAC2D ELEMENTOS: 16 NÓS: 27
ELEMENTOS: 16 NÓS: 69Malha de elementos finitos: Programa RMA2
Nó Oeste Nó Intermédio Nó Este
Nó Oeste Nó Intermédio Nó Este
Figura 4.17 - Malhas de elementos finitos da bacia rectangular – caso de teste.
4.3.4.3 Análise de resultados
Os resultados obtidos para as elevações da superfície livre no nó Oeste são apresentados
na Figura 4.18. Estes resultados correspondem às elevações obtidas entre os 15 000 s e
os 20 000 s do tempo de cálculo. Pode considerar-se que a solução numérica obtida
pelos dois modelos apresenta uma aproximação razoável à solução analítica. As
assimetrias existentes revelam a influência dos termos não lineares considerados nas
equações dos modelos numéricos. Estas assimetrias são ainda mais visíveis nos
resultados que se apresentam na Figura 4.19, para os módulos das velocidades no nó
Este. Embora não seja muito significativa a diferença de resultados obtidos entre os dois
programas, o melhor desempenho revelado pelo programa RMA2 prende-se com o facto
de utilizar elementos de 8 nós. Esta diferença no tipo de funções de forma utilizadas em
cada um dos modelos implica um custo adicional em termos de tempo gasto no cálculo
(tempo de CPU), que poderá ser significativamente mais elevado no caso do programa
RMA2. Neste exemplo, com um número de elementos baixo (16), a diferença não é
muito significativa; contudo esta diferença acentuar-se-á no caso de problemas de maior
dimensão.

Capítulo 4
158
P r o g r a m a R M A 2
- 0 , 2 0
- 0 , 1 5
- 0 , 1 0
- 0 , 0 5
0 , 0 0
0 , 0 5
0 , 1 0
0 , 1 5
0 , 2 0
1 5 0 0 0 1 5 5 0 0 1 6 0 0 0 1 6 5 0 0 1 7 0 0 0 1 7 5 0 0 1 8 0 0 0 1 8 5 0 0 1 9 0 0 0 1 9 5 0 0 2 0 0 0 0
T e m p o ( s )
E l e v a ç ã o ( m )
E l e v a ç õ e s - s o l u ç ã o n u m é r i c a E l e v a ç õ e s - s o l u ç ã o a n a l í t i c a
Prog . T E L E M A C 2 D
- 0 , 2 0
- 0 , 1 5
- 0 , 1 0
- 0 , 0 5
0 , 0 0
0 , 0 5
0 , 1 0
0 , 1 5
0 , 2 0
1 5 0 0 0 1 5 5 0 0 1 6 0 0 0 1 6 5 0 0 1 7 0 0 0 1 7 5 0 0 1 8 0 0 0 1 8 5 0 0 1 9 0 0 0 1 9 5 0 0 2 0 0 0 0
Tempo ( s )
E l e v a ç ã o ( m )
E l e v a ç õ e s - s o l u ç ã o n u m é r i c a E l e v a ç õ e s - s o l u ç ã o a n a l í t i c a
Figura 4.18 – Elevações da superfície livre (Nó Oeste) – Resultados
Programa R M A 2
0 , 0 0
0 , 0 5
0 , 1 0
0 , 1 5
0 , 2 0
0 , 2 5
1 5 0 0 0 1 5 5 0 0 1 6 0 0 0 1 6 5 0 0 1 7 0 0 0 1 7 5 0 0 1 8 0 0 0 1 8 5 0 0 1 9 0 0 0 1 9 5 0 0 2 0 0 0 0
Tempo ( s )
Módulo da velocidade (m/s)
Velocidade - solução numérica Velocidade - solução analítica
Programa T E L E M A C 2 D
0 , 0 0
0 , 0 5
0 , 1 0
0 , 1 5
0 , 2 0
0 , 2 5
1 5 0 0 0 1 5 5 0 0 1 6 0 0 0 1 6 5 0 0 1 7 0 0 0 1 7 5 0 0 1 8 0 0 0 1 8 5 0 0 1 9 0 0 0 1 9 5 0 0 2 0 0 0 0
Tempo (s)
Módulo da velocidade (m/s)
Velocidade - solução numérica Velocidade - solução analítica
Figura 4.19 - Módulos das velocidades (nó Este)- Resultados

4.3 Modelos hidrodinâmicos
159
Os resultados apresentados anteriormente foram obtidos, como foi referido, impondo
como condição de fronteira a função representada pela Eq. 4.24. Trata-se portanto de
uma função dinâmica imposta em termos de elevações da superfície livre.
Procedeu-se ainda à resolução do mesmo problema por ambos os programas impondo
uma condição de fronteira em termos de velocidades, expressa pela Eq. 4.22 com x=Lb,
ou seja:
( ) ( )[ ] Lb= para )Lbtanac
xtsenkh
u αω += (4.25)
Programa RMA2
-0,20
-0,15
-0,10
-0,05
0,00
0,05
0,10
0,15
0,20
0 1000 2000 3000 4000 5000 6000Tempo (s)
Elevação(m)
Elevações - solução numérica Elevações - solução analítica
Programa TELEMAC2D
-0,20
-0,15
-0,10
-0,05
0,00
0,05
0,10
0,15
0,20
0 1000 2000 3000 4000 5000 6000Tempo (s)
Elevação (m)
Elevações - solução numérica Elevações - solução analítica
Figura 4.20 - Elevações (nó Oeste)- Resultados

Capítulo 4
160
Nas Figuras 4.20 e 4.21 apresentam-se os resultados das elevações no nó Oeste e de
módulos das velocidades no nó intermédio para um período com início no repouso e de
duração igual a 6000 s. Estes evidenciam uma rápida convergência para a solução
estacionária e uma melhor aproximação à solução analítica, quer em termos de
elevações da superfície livre quer em termos de velocidades.
Programa RMA2
0,000
0,025
0,050
0,075
0,100
0,125
0,150
0 1000 2000 3000 4000 5000 6000
Tempo (s)
Módulo da velocidade (m/s)
Velocidades - solução numérica Velocidades - solução analítica
Programa TELEMAC2D
0,000
0,025
0,050
0,075
0,100
0,125
0,150
0 1000 2000 3000 4000 5000 6000
Tempo (s)
Módulo da velocidade (m/s)
Velocidades - solução numérica Velocidades - solução analítica
Figura 4.21 - Módulos das velocidades (nó Intermédio)- Resultados

4.3 Modelos hidrodinâmicos
161
4.3.5 Desenvolvimento do módulo hidrodinâmico do programa POM
Neste ponto procede-se a uma análise de desempenho do programa POM na simulação
do caso de teste apresentado no ponto anterior e apresenta-se um desenvolvimento do
programa que consiste na inclusão da possibilidade de cálculo do modo externo pelo
método dos elementos finitos (programa RMA2). Caracterizam-se os desenvolvimentos
efectuados no programa original, avaliam-se as condições em que tal substituição se
poderá justificar e quantificam-se os custos que acarreta em termos de tempo de cálculo.
4.3.5.1 Modelos numéricos considerados na análise comparativa
Conforme se constatou através da análise efectuada no ponto anterior, num modelo
hidrodinâmico, as condições de fronteira a impor em fronteiras artificiais abertas
deverão ser preferencialmente definidas em termos das componentes da velocidade. No
entanto, na generalidade dos problemas reais, é habitual encontrarem-se apenas
disponíveis as elevações da superfície livre (podendo ser facilmente quantificadas
através da utilização de modelos desenvolvidos com base em observações efectuadas a
partir de satélites), sendo mais raros aqueles em que se dispõem simultaneamente, de
medições da velocidade. Assim, o desempenho de um determinado modelo dependerá,
entre outros factores, do desempenho do programa quando as referidas condições de
fronteira são impostas em termos de elevações da superfície livre.
Tendo como objectivo a avaliação do desempenho do modo externo do programa POM,
para as condições de fronteira impostas em termos de elevações da superfície livre (ver
Eq. 4.24), procedeu-se a uma análise comparativa correspondente ao caso de teste
caracterizado na Figura 4.16, considerando um modelo implementado no programa
POM e outro modelo numérico implementado no programa RMA2. Na implementação
do modelo no programa POM foi considerada uma malha de diferenças finitas com
espaçamento constante, segundo as duas direcções horizontais, igual a 25,0 m. A malha
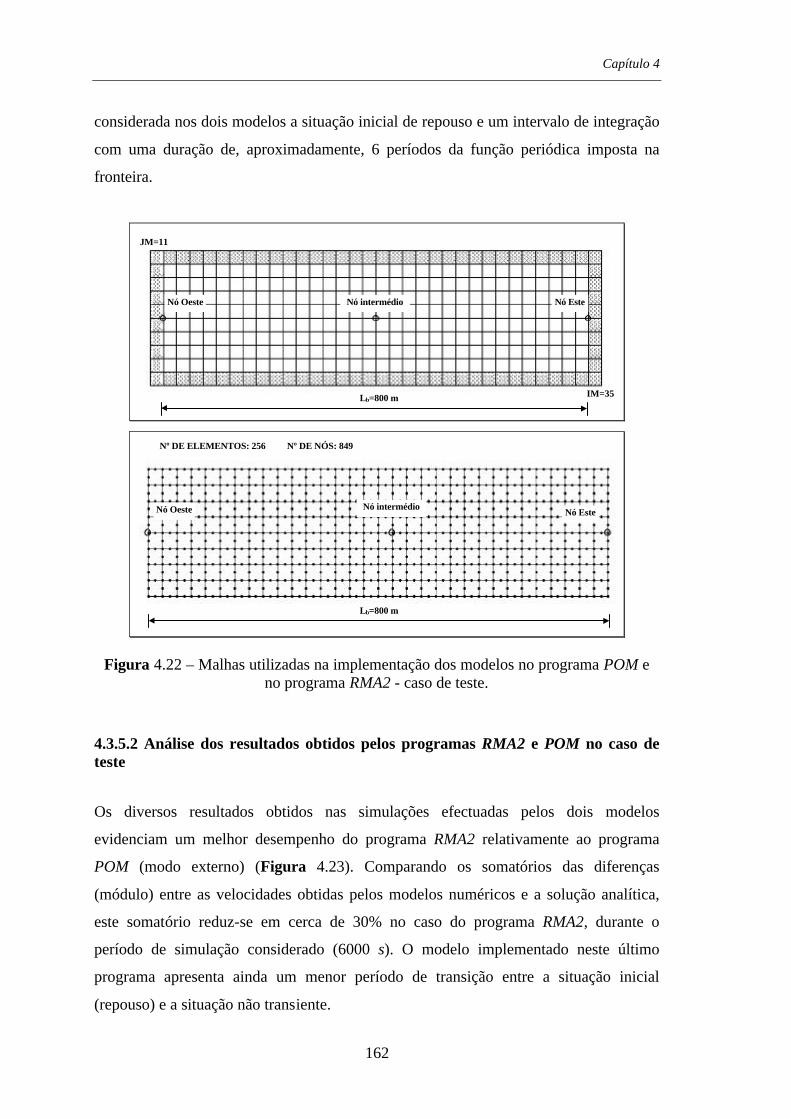
de elementos finitos utilizada no programa RMA2 é constituída por 256 elementos
quadrangulares de oito nós (Figura 4.22). As simulações foram efectuadas utilizando-se
um passo de tempo de 1,0 s no programa POM (para cumprimento da limitação de CFL,
expressa pela Eq. 4.17) e um passo de tempo de 25 s no caso do programa RMA2. Foi
Capítulo 4
162
considerada nos dois modelos a situação inicial de repouso e um intervalo de integração
com uma duração de, aproximadamente, 6 períodos da função periódica imposta na
fronteira.
IM=35
JM=11
Lb=800 m
Nó intermédio Nó EsteNó Oeste
Nº DE ELEMENTOS: 256 Nº DE NÓS: 849
Lb=800 m
Nó intermédioNó EsteNó Oeste
Figura 4.22 – Malhas utilizadas na implementação dos modelos no programa POM e no programa RMA2 - caso de teste.
4.3.5.2 Análise dos resultados obtidos pelos programas RMA2 e POM no caso de teste
Os diversos resultados obtidos nas simulações efectuadas pelos dois modelos
evidenciam um melhor desempenho do programa RMA2 relativamente ao programa
POM (modo externo) (Figura 4.23). Comparando os somatórios das diferenças
(módulo) entre as velocidades obtidas pelos modelos numéricos e a solução analítica,
este somatório reduz-se em cerca de 30% no caso do programa RMA2, durante o
período de simulação considerado (6000 s). O modelo implementado neste último
programa apresenta ainda um menor período de transição entre a situação inicial
(repouso) e a situação não transiente.

4.3 Modelos hidrodinâmicos
163
POM (modo externo) - Nó intermédio
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0 1500 3000 4500 6000
Tempo (s)
U (m/s)
Solução numérica Solução analítica
RMA2 - Nó intermédio
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0 1500 3000 4500 6000
Tempo (s)
U (m/s)
Solução numérica Solução analítica
POM (modo externo) - Nó intermédio
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0 1500 3000 4500 6000
Tempo (s)
η (m)
Solução analítica Solução numérica
RMA2 - Nó intermédio
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0 1500 3000 4500 6000
Tempo (s)
η (m)
Solução analítica Solução numérica
Figura 4.23 – Soluções numéricas e solução analítica para o nó intermédio do caso de teste.

Capítulo 4
164
Salienta-se, no entanto, que os resultados anteriores foram obtidos impondo-se como
condições de fronteira as elevações na superfície livre. Os resultados poderão ser
significativamente melhorados (como foi evidenciado pelos resultados apresentados na
análise comparativa efectuada entre os programas TELEMAC2D e RMA2, apresentada
anteriormente) em modelos em que se conheçam as leis de variação da velocidade nas
fronteiras. Na Figura 4.24 apresentam-se os resultados numéricos, para o mesmo caso
de teste, numa simulação efectuada com o modelo implementado no programa POM
(modo externo) mas em que a condição de fronteira imposta é baseada numa condição
de radiação da forma:
POM (modo externo) - Nó intermédio
-0,100
-0,075
-0,050
-0,025
0,000
0,025
0,050
0,075
0,100
0 500 1000 1500 2000
Tempo (s)
U(m/s)
Solução numérica Solução analítica
POM (modo externo) - Nó intermédio
-0,15
-0,10
-0,05
0,00
0,05
0,10
0,15
0 500 1000 1500 2000
Tempo (s)
η (m)
Solução numérica Solução analítica
Figura 4.24 – Soluções numérica e analítica para a elevação e velocidade no nó intermédio do caso de teste.

4.3 Modelos hidrodinâmicos
165
( )**,ηη UfrghhU =− (4.26)
em que ( )**,ηUfr é uma função estabelecida a partir dos valores conhecidos das
elevações e das velocidades na fronteira.
Os resultados da solução numérica apresentam-se praticamente coincidentes com os
resultados da solução analítica sendo muito mais curto o período de transição entre a
situação de repouso e a situação estável. O melhor desempenho do programa RMA2 na
determinação das componentes horizontais da velocidade média e das elevações da
superfície livre, evidenciado quer pelos resultados anteriormente apresentados quer por
outros de simulações efectuadas em diferentes modelos, motivaram o desenvolvimento
de uma versão do programa POM (denominada daqui em diante de POM-UMH) em que
a determinação das variáveis do modo externo é efectuada a partir do método de cálculo
implementado no programa RMA2.
4.3.5.3 Tempos de cálculo nos programas POM e RMA2
Antes de se proceder à caracterização dos desenvolvimentos efectuados no programa
POM, procurou-se avaliar os custos computacionais que a substituição do método de
cálculo do modo externo original pelo método dos elementos finitos apresenta em
termos de tempo de cálculo (tempo CPU). O tempo de cálculo no programa POM
dispendido na realização de uma determinada simulação depende essencialmente do
hardware utilizado e dos passos de tempo definidos no modo externo e no modo interno
(limitados superiormente pelas condições expressas pelas equações 4.17 e 4.18,
respectivamente). Os tempos de cálculo abaixo apresentados referem-se a versões dos
programas compilados num computador pessoal (PC) com um processador Pentium 500
Mhz. O passo de tempo do modo externo depende da resolução espacial horizontal da
malha de diferenças finitas, da profundidade de água e da velocidade máxima do
escoamento. No gráfico da Figura 4.25 apresentam-se diversas rectas que permitem
analisar a variação do passo de tempo do modo externo para espaçamentos da malha
entre 100 m e 1000 m, considerando-se uma velocidade máxima do escoamento de 2,0

Capítulo 4
166
m s-1. Como resulta da análise da CFL, os menores espaçamentos na malha e as regiões
de maiores profundidades obrigam à utilização de passos de tempo mais restritivos.
U max =2,0 m/s
0
10
20
30
40
50
60
70
100 250 400 550 700 850 1000
δ x =δ y (m)
t e (
s)
H=2,0 m
H=10,0 m
H=20,0 m
H=50,0 m
H=100,0 m
Figura 4.25 – Passo de tempo do modo externo do programa POM em função da resolução da malha de DF e da profundidade da água.
Fixada uma determinada resolução espacial é possível determinar o passo de tempo
máximo a utilizar no modo interno. Os valores deste passo de tempo, para valores do
espaçamento horizontal fixos, serão tanto menores quanto maiores forem os valores da
celeridade das ondas internas (c) e da velocidade máxima da corrente (Umax), conforme
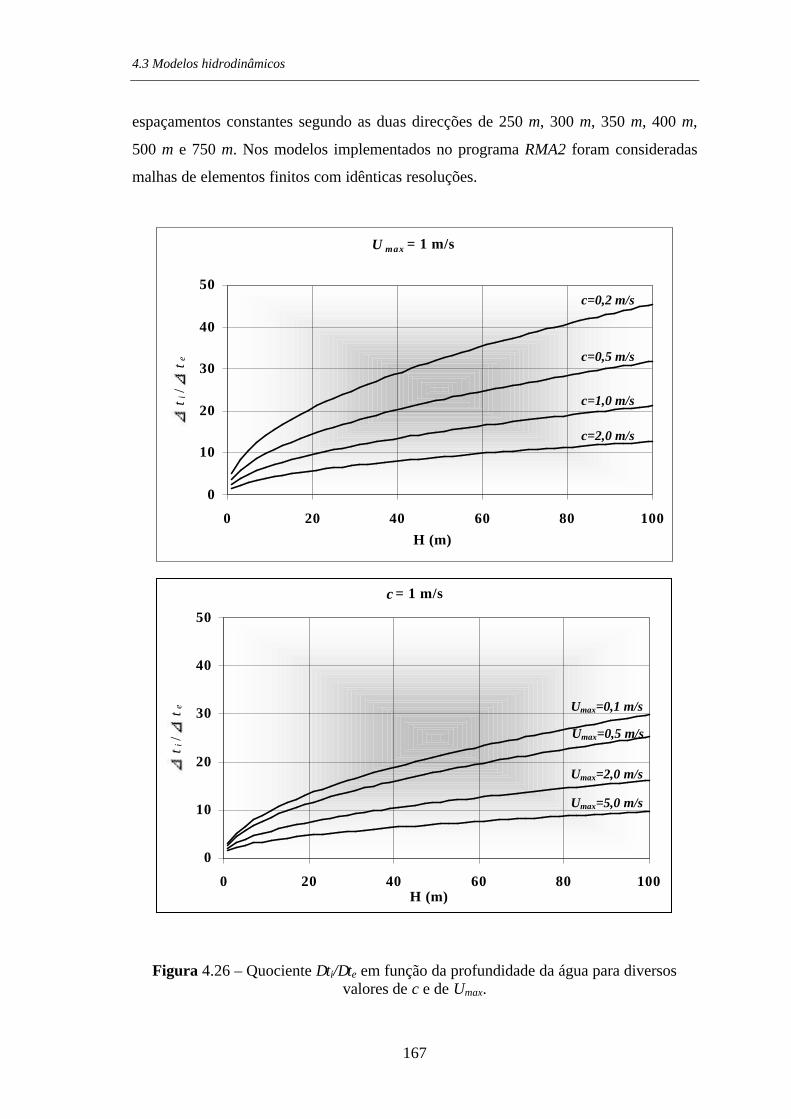
se constata pela análise dos gráficos apresentados na Figura 4.26. Nestes gráficos
representam-se as curvas de variação do quociente ∆ti/∆te com a profundidade, para
diferentes valores de Umax e c. Considera-se um espaçamento da malha igual segundo as
direcções horizontais de 250 m.
A quantificação dos tempos de cálculo foi realizada utilizando-se um caso de teste em
que é considerada uma bacia rectangular (dimensões 30 km x 10 km) com um fundo
plano apresentando uma profundidade de 20 m. Foram considerados diferentes modelos
do caso de teste em que se variou a resolução espacial (horizontal e vertical). No caso
do modo externo do programa POM consideraram-se diferentes malhas de DF com
4.3 Modelos hidrodinâmicos
167
espaçamentos constantes segundo as duas direcções de 250 m, 300 m, 350 m, 400 m,
500 m e 750 m. Nos modelos implementados no programa RMA2 foram consideradas
malhas de elementos finitos com idênticas resoluções.
U max = 1 m/s
0
10
20
30
40
50
0 20 40 60 80 100H (m)
t i/
t e
c=0,2 m/s
c=0,5 m/s
c=1,0 m/s
c=2,0 m/s
C = 1 m/s
0
10
20
30
40
50
0 20 40 60 80 100H (m)
t i/
t e Umax=0,1 m/s
Umax=0,5 m/s
Umax=2,0 m/s
Umax=5,0 m/s
c
Figura 4.26 – Quociente ∆ti/∆te em função da profundidade da água para diversos valores de c e de Umax.

Capítulo 4
168
Estabelecidas as características das malhas foram quantificados os passos de tempo ∆ti e
∆te limitados pelas condições de CFL a utilizar em cada um dos modelos. O passo de
tempo utilizado no programa RMA2 foi considerado igual a ∆ti. Embora este programa
não apresente um limite para o passo de tempo decorrente do método numérico nele
implementado (o método é implícito) no caso da sua utilização para substituição do
modo externo do programa POM, o passo de tempo deverá respeitar a condição de CFL
associada ao modo interno.
No Quadro 4.2 apresentam-se as principais características de cada um dos modelos
(espaçamentos das malhas, passos de tempo ∆ti e ∆te e número de divisões IM e JM das
malhas) e os tempos de cálculo correspondentes a um dia de integração.
Quadro 4.2 – Tempos de cálculo do programa RMA2 e do modo externo do programa POM para diferentes resoluções espaciais.
δx=δy ∆te ∆ti IM JM Tempo de cálculo Modo externo POM
Tempo de cálculo RMA2
(m) (s) (s) (min)/dia integração (min)/dia integração
250 4,0 80,0 121 41 16,0 120,0 300 6,0 120,0 101 33 7,0 48,0 350 7,5 150,0 86 29 4,0 20,5 400 9,0 180,0 76 26 2,0 12,0 500 10,0 200,0 61 21 1,4 6,0 750 15,0 300,0 41 15 0,5 2,0
O programa RMA2 revela-se mais dispendioso (como seria de esperar, dadas as
características dos métodos numéricos envolvidos), demorando de quatro a
aproximadamente oito vezes mais tempo que o modo externo do programa POM
quando o espaçamento da malha se reduz de 750 m para 250 m.
Quantificados os tempos de cálculo do modo externo do programa POM e do programa
RMA2, interessa avaliar o agravamento que a substituição em análise provoca no tempo
de cálculo do programa POM (modelos tridimensionais). Para tal, implementaram-se
diversos modelos, para o mesmo caso de teste apresentado anteriormente, com
diferentes resoluções espaciais. Nas direcções horizontais foram considerados
espaçamentos das malhas de 250 m e de 500 m. Na direcção vertical foram consideradas
4.3 Modelos hidrodinâmicos
169
cinco resoluções: 2, 4, 6, 10 e 20 camadas (correspondentes a valores de KB iguais a 3,
5, 7, 11, e 21, respectivamente).
O modo interno, mais exigente em termos de esforço computacional, apresenta tempos
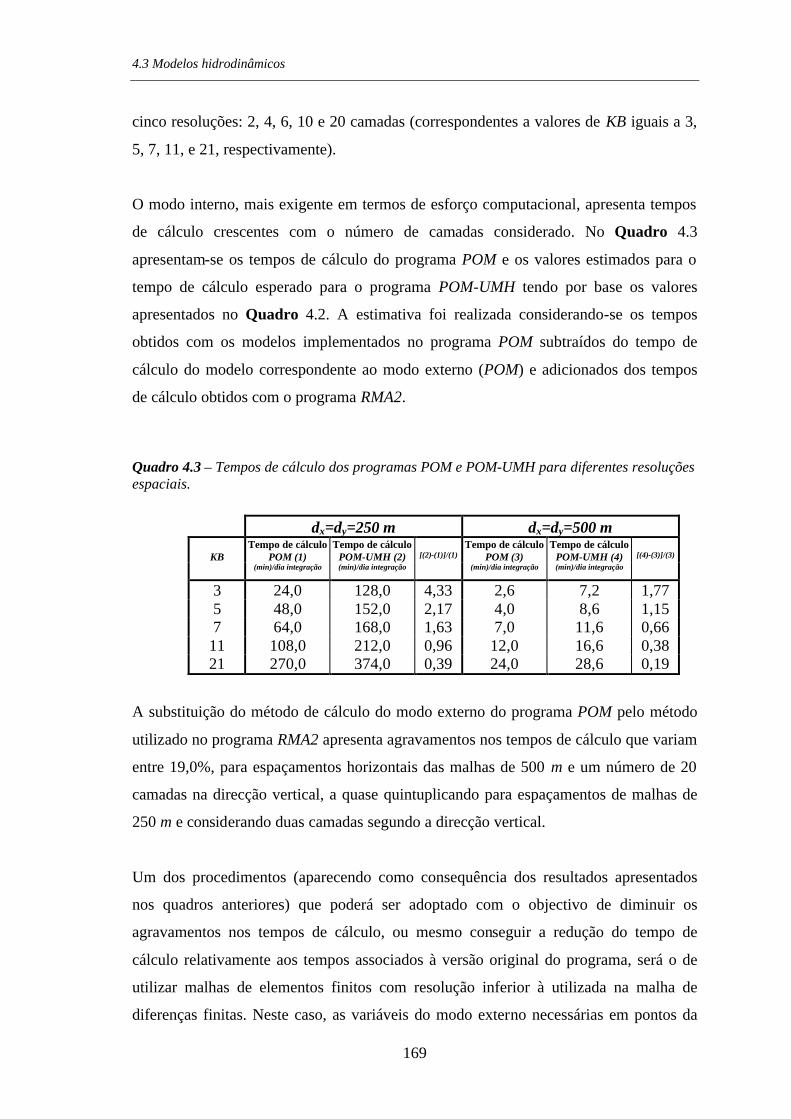
de cálculo crescentes com o número de camadas considerado. No Quadro 4.3
apresentam-se os tempos de cálculo do programa POM e os valores estimados para o
tempo de cálculo esperado para o programa POM-UMH tendo por base os valores
apresentados no Quadro 4.2. A estimativa foi realizada considerando-se os tempos
obtidos com os modelos implementados no programa POM subtraídos do tempo de
cálculo do modelo correspondente ao modo externo (POM) e adicionados dos tempos
de cálculo obtidos com o programa RMA2.
Quadro 4.3 – Tempos de cálculo dos programas POM e POM-UMH para diferentes resoluções espaciais.
δx=δy=250 m δx=δy=500 m
KB Tempo de cálculo
POM (1) Tempo de cálculo
POM-UMH (2)
[(2)-(1)]/(1) Tempo de cálculo
POM (3) Tempo de cálculo
POM-UMH (4)
[(4)-(3)]/(3)
(min)/dia integração (min)/dia integração (min)/dia integração (min)/dia integração
3 24,0 128,0 4,33 2,6 7,2 1,77 5 48,0 152,0 2,17 4,0 8,6 1,15 7 64,0 168,0 1,63 7,0 11,6 0,66
11 108,0 212,0 0,96 12,0 16,6 0,38 21 270,0 374,0 0,39 24,0 28,6 0,19
A substituição do método de cálculo do modo externo do programa POM pelo método
utilizado no programa RMA2 apresenta agravamentos nos tempos de cálculo que variam
entre 19,0%, para espaçamentos horizontais das malhas de 500 m e um número de 20
camadas na direcção vertical, a quase quintuplicando para espaçamentos de malhas de
250 m e considerando duas camadas segundo a direcção vertical.
Um dos procedimentos (aparecendo como consequência dos resultados apresentados
nos quadros anteriores) que poderá ser adoptado com o objectivo de diminuir os
agravamentos nos tempos de cálculo, ou mesmo conseguir a redução do tempo de
cálculo relativamente aos tempos associados à versão original do programa, será o de
utilizar malhas de elementos finitos com resolução inferior à utilizada na malha de
diferenças finitas. Neste caso, as variáveis do modo externo necessárias em pontos da

Capítulo 4
170
malha de diferenças finitas durante os cálculos do modo interno poderiam ser obtidas
por interpolação dos valores obtidos na malha de elementos finitos. A adopção deste
procedimento conduziria, no caso de se utilizar um espaçamento de 500 m no modo
externo, um espaçamento de 250 m no modo interno e considerando um modelo com 10
camadas (KB=11), a um tempo de cálculo no programa POM-UMH da ordem de 100
min/dia integração. Na versão do programa POM-UMH implementada optou-se, no
entanto, por considerar que as malhas utilizadas apresentam sempre resoluções
horizontais idênticas em ambas as direcções.
4.3.5.4 Programa POM-UMH
Como já foi referido anteriormente, o programa POM-UMH, corresponde a um
desenvolvimento numérico cuja formulação matemática de base é idêntica à do
programa POM, mas em que o modo externo é calculado de acordo com a metodologia
utilizada no programa RMA2. A versão do presente programa é válida para aplicações
em que os termos baroclínicos (envolvendo gradientes verticais de massa volúmica) e
os termos dispersivos (Gx e Gy) nas equações de conservação da quantidade de
movimento integradas na vertical possam ser desprezados. Na Figura 4.27 apresenta-se
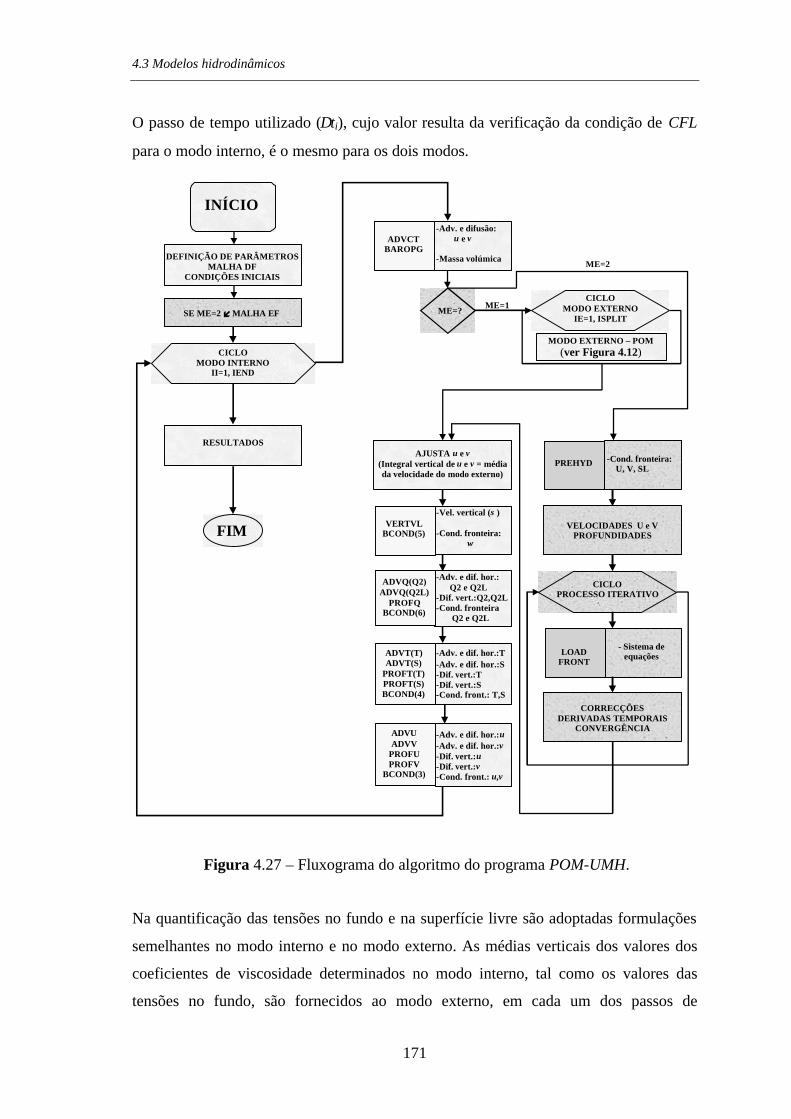
o fluxograma do programa onde se incluem as etapas fundamentais do cálculo.
Relativamente ao modo externo são consideradas as duas opções de cálculo (ME=1 ou
2). Este modo é chamado em todos os ciclos do modo interno e apresenta as seguintes
principais fases de cálculo:
- Leitura das condições impostas nas fronteiras abertas;
- Cálculo das componentes da velocidade média e das profundidades de água
para o instante corrente, segundo o método não linear de discretização
temporal adoptado, a partir dos valores calculados no instante anterior e
utilizando os valores das derivadas temporais das variáveis;
- Ciclo iterativo (método de Newton-Raphson) para a determinação das
variáveis nos nós da malha de elementos finitos. O sistema de equações é
formado e resolvido nas subrotinas LOAD e FRONT. Segue-se a aplicação
das correcções determinadas, a actualização das derivadas temporais e a
verificação do critério de convergência (definido a partir da variação da
profundidade).
4.3 Modelos hidrodinâmicos
171
O passo de tempo utilizado (∆ti), cujo valor resulta da verificação da condição de CFL
para o modo interno, é o mesmo para os dois modos.
PREHYD
ADVUADVV
PROFUPROFV
BCOND(3)
-Vel. vertical (σ)
-Cond. fronteira: w
ADVCTBAROPG
VERTVLBCOND(5)
ADVQ(Q2)ADVQ(Q2L)
PROFQBCOND(6)
ADVT(T)ADVT(S)
PROFT(T)PROFT(S)BCOND(4)
LOADFRONT
INÍCIO
FIM
DEFINIÇÃO DE PARÂMETROSMALHA DF
CONDIÇÕES INICIAIS
CICLOMODO INTERNO
II=1, IEND
RESULTADOS
-Adv. e difusão: u e v
-Massa volúmica
CICLOPROCESSO ITERATIVO
AJUSTA u e v(Integral vertical de u e v = médiada velocidade do modo externo)
VELOCIDADES U e VPROFUNDIDADES
-Adv. e dif. hor.: Q2 e Q2L-Dif. vert.:Q2,Q2L-Cond. fronteira Q2 e Q2L
-Adv. e dif. hor.:T-Adv. e dif. hor.:S-Dif. vert.:T-Dif. vert.:S-Cond. front.: T,S
-Adv. e dif. hor.:u-Adv. e dif. hor.:v-Dif. vert.:u-Dif. vert.:v-Cond. front.: u,v
-Cond. fronteira: U, V, SL
- Sistema deequações
SE ME=2 í MALHA EF ME=?CICLO
MODO EXTERNOIE=1, ISPLIT
ME=2
MODO EXTERNO – POM(ver Figura 4.12)
ME=1
CORRECÇÕESDERIVADAS TEMPORAIS
CONVERGÊNCIA
Figura 4.27 – Fluxograma do algoritmo do programa POM-UMH.
Na quantificação das tensões no fundo e na superfície livre são adoptadas formulações
semelhantes no modo interno e no modo externo. As médias verticais dos valores dos
coeficientes de viscosidade determinados no modo interno, tal como os valores das
tensões no fundo, são fornecidos ao modo externo, em cada um dos passos de

Capítulo 4
172
integração. A transferência dos valores das variáveis entre as duas malhas utilizadas é
efectuada, na presente versão do modelo, através da definição de ponteiros que
permitem associar a localização dos nós da malha de elementos finitos com as células
da malha de diferenças finitas.
4.3.5.5 Exemplos de aplicação
O programa POM-UMH foi verificado utilizando diversos casos de teste com condições
de fronteira bem determinadas e com geometrias simplificadas. Um dos casos de teste
desenvolvido refere-se a um escoamento com profundidade constante (5,0 m) numa
faixa de um canal de fundo plano e com uma inclinação igual a 0,1‰. Nestas
condições, a velocidade média do escoamento tridimensional deverá coincidir com a
velocidade média obtida a partir da fórmula de Manning-Strickler (considerou-se um
coeficiente de 20 m1/3 s-1). Os coeficientes de atrito no fundo foram definidos de forma a
que a superfície livre do escoamento fosse paralela ao fundo, verificando-se assim as
condições de um escoamento uniforme. Na Figura 4.28 apresenta-se o perfil vertical de
velocidade (foram consideradas 20 camadas no cálculo tridimensional) numa secção P
do domínio rectangular em planta (1000 m x 100 m) modelado com o programa
POM-UMH. Os resultados obtidos noutros pontos do domínio são semelhantes aos que
se apresentam na figura anterior. A velocidade média obtida é de 0,58 m s-1.
1000 m
100 m
i
i=0,1 ‰ KM-Strickler=20 m1/3 s-1
5 m
Planta
Perfil longitudinal
P
Profundidade (m)
-5.0
-4.5
-4.0
-3.5
-3.0
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7U (m/s)
Secção P
Figura 4.28 – Exemplo de aplicação do programa POM-UMH: canal de fundo plano.

4.3 Modelos hidrodinâmicos
173
Alguns dos modelos de sistemas reais poderão ser criados com sucesso admitindo-se a
hipótese de homogeneidade vertical. Nestes casos, um modelo bidimensional (2DH),
menos exigente em termos computacionais, poderá ser suficiente para a caracterização
das correntes na generalidade do domínio. Em zonas em que, devido à existência de
alguma singularidade, seja necessária a quantificação das três componentes da
velocidade, poderá ser construído um modelo tridimensional cujo domínio corresponda
a uma sub-região da zona a estudar.
No segundo exemplo, em que se procede à simulação do escoamento em duas bacias
ligadas por um canal, ilustram-se as potencialidades do programa POM-UMH na
construção de modelos em que seja necessária a caracterização tridimensional em
sub-regiões do domínio. Considera-se que a fronteira Oeste da bacia da esquerda
(Figura 4.29) é uma fronteira aberta, na qual são impostas as elevações da superfície
livre. Estas são quantificadas considerando que se trata de uma onda sinusoidal de
amplitude 1,0 m e com um período de 15 min.
500 1000 1500 2000 2500
N
S
W E
500
1000
1500
2000
2500
y [m]
x [m]
3000
21,0
20,0
19,0
18,0
17,0
16,0
15,0
14,0
13,0
12,0
11,0
Profundidade (m)
Figura 4.29 – Exemplo de aplicação do programa POM-UMH: bacias ligadas por um canal.
Capítulo 4
174
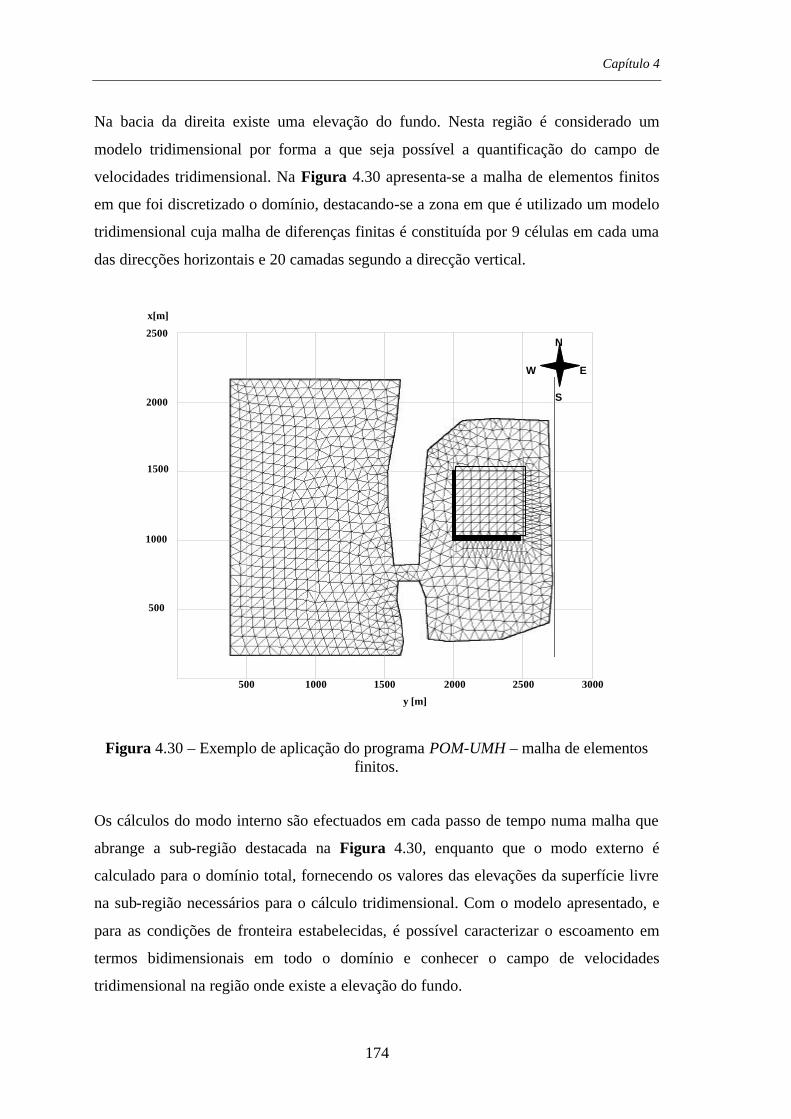
Na bacia da direita existe uma elevação do fundo. Nesta região é considerado um
modelo tridimensional por forma a que seja possível a quantificação do campo de
velocidades tridimensional. Na Figura 4.30 apresenta-se a malha de elementos finitos
em que foi discretizado o domínio, destacando-se a zona em que é utilizado um modelo
tridimensional cuja malha de diferenças finitas é constituída por 9 células em cada uma
das direcções horizontais e 20 camadas segundo a direcção vertical.
500 1000 1500 2000 2500
N
S
W E
500
1000
1500
2000
2500
y [m]
x[m]
3000
Figura 4.30 – Exemplo de aplicação do programa POM-UMH – malha de elementos finitos.
Os cálculos do modo interno são efectuados em cada passo de tempo numa malha que
abrange a sub-região destacada na Figura 4.30, enquanto que o modo externo é
calculado para o domínio total, fornecendo os valores das elevações da superfície livre
na sub-região necessários para o cálculo tridimensional. Com o modelo apresentado, e
para as condições de fronteira estabelecidas, é possível caracterizar o escoamento em
termos bidimensionais em todo o domínio e conhecer o campo de velocidades
tridimensional na região onde existe a elevação do fundo.

4.3 Modelos hidrodinâmicos
175
Na Figura 4.31 apresentam-se alguns dos resultados obtidos durante uma simulação
com uma duração de 30 minutos. Os resultados apresentados referem-se aos instantes
em que ocorrem as velocidades máximas.
500 1000 1500 2000 2500
N
S
W E
500
1000
1500
2000
2500
x [m]
y [m]
3000
1 m/s
500 1000 1500 2000 2500
N
S
W E
500
1000
1500
2000
2500
x [m]
y [m]
3000
1 m/s
2000 2500
N
S
W E
1500
0,1 m/s
1000
x [m]
y [m] KB=10
2000 2500
N
S
W E
1500
0,1 m/s
1000
x [m]
y [m] KB=10
Figura 4.31 – Exemplo de aplicação do programa POM-UMH – campos de velocidades máximas instantâneas.
Os resultados foram processados no programa SMS, depois de serem organizados em
formatos compatíveis com este programa, utilizando-se para tal diversos programas
desenvolvidos para o efeito. Nestes programas é efectuada a transformação da
componente vertical da velocidade em coordenadas sigma para coordenadas cartesianas.
Os resultados constantes da Figura 4.32 representam a projecção do campo de

Capítulo 4
176
velocidades em planos verticais (segundo alinhamentos Oeste-Este e Sul-Norte). Na
direcção vertical é aplicado um factor de escala.
2000 2500
W E
0
20x [m]
H [m] J=5
u=10 cm/s
w=1 cm/s
2000 2500
W E
0
20x [m]
H [m] J=5
u=10 cm/s
w=1 cm/s
1000 1500
S N
0
20y [m]
H [m] I=5
u=10 cm/s
w=1 cm/s
1000 1500
S N
0
20y [m]
H [m] I=5
v=10 cm/sw=1 cm/s
Figura 4.32 – Exemplo de aplicação do programa POM-UMH - campos de velocidades máximas instantâneas em planos verticais.

4.4 Modelos de qualidade da água
177
4.4 Modelos de qualidade da água
Para a modelação conjunta da hidrodinâmica e da qualidade da água em zonas costeiras
é indispensável o desenvolvimento de uma estrutura comum que permita a resolução
quer das equações que regem a física dos escoamentos nestas zonas (equação da
continuidade e equações de conservação da quantidade de movimento), quer as
equações de transporte de massa (em cada um dos processos são normalmente
seleccionadas as variáveis consideradas preponderantes, estabelecendo-se as
correspondentes equações para cada uma dessas variáveis) que permitem caracterizar a
distribuição dinâmica de variáveis indicadoras do estado de qualidade da água
(equações de advecção-difusão-reacção de substâncias dissolvidas na água). Se,
relativamente às primeiras, as formulações matemáticas conhecidas actualmente são
aceites de forma quase unânime (com excepção para os aspectos relacionados com a
modelação da turbulência), a modelação dos processos biogeoquímicos apresenta-se
muito menos consensual, dadas as simplificações efectuadas, sobretudo no que se refere
à caracterização das reacções onde não existem normalmente leis universais para a sua
definição. Assim, no estado actual de conhecimentos, o estabelecimento das leis que
regem os processos a que determinadas substâncias estarão sujeitas em meio hídrico,
deverá ser sempre questionada e se possível comprovada, com base em dados de campo
disponíveis ou através de estudos desenvolvidos propositadamente com esse fim.
Neste capítulo serão apresentados e caracterizados diferentes processos definidos tendo
em vista o estudo e análise de cenários de qualidade da água com importância para as
zonas costeiras.
Procede-se à caracterização do programa RMA4, que utiliza as soluções hidrodinâmicas
do programa RMA2, para calcular as distribuições de substâncias conservativas e do
programa PROCESSOS, que é utilizado na modelação de processos biogeoquímicos em
condições hidrodinâmicas simplificadas.
São ainda apresentados o programa RMA4-UMQ (2DH), que constituí uma nova versão
do programa RMA4 desenvolvida com o objectivo de modelar substâncias não
Capítulo 4
178
conservativas, e o programa POM-UMQ que permite a modelação física e biológica
tridimensional de sistemas costeiros.
4.4.1 Caracterização de processos para avaliação da qualidade da água
Os diferentes processos biogeoquímicos com interesse para o estudo das zonas costeiras
apresentam uma diversidade muito grande, tendo-se optado neste trabalho por definir
um quadro, o mais abrangente possível, relativo a problemas com interesse do ponto de
vista da engenharia, e que engloba quer processos simples (como por exemplo a
modelação de descargas acidentais de poluentes conservativos), quer processos de
maior complexidade, como é o caso dos modelos de produção primária nas zonas
costeiras.
4.4.1.1 Substâncias conservativas
Nos processos envolvendo substâncias conservativas considera-se apenas o transporte
de uma determinada substância no meio hídrico através de advecção e difusão.
As descargas acidentais de poluentes em zonas costeiras são infelizmente uma realidade
cada vez mais frequente. A avaliação das extensões e durações destas descargas poderá
ser efectuada recorrendo-se a um modelo em que a descarga acidental é modelada por
uma substância conservativa. A equação que permite determinar a distribuição dinâmica
da concentração da substância (designada por B) é dada, em coordenadas cartesianas,
por:
2
2
2
2
2
2
zB
AyB
xB
AzB
wyB
vxB
utB
zh ∂∂
+
∂∂
+∂∂
+∂∂
−∂∂
−∂∂
−=∂∂
(4.27)
Para além das situações de descargas acidentais, estes modelos simples têm também
interesse prático para a quantificação dos tempos de residência dos sistemas costeiros e
para a análise do efeito de diferentes condições hidrodinâmicas nas condições de
mistura desses sistemas.

4.4 Modelos de qualidade da água
179
4.4.1.2 Substâncias não conservativas
A generalidade dos elementos e substâncias nos meios marinhos apresentam reacções
com outros elementos e/ou substâncias, resultando na sua transformação (diminuição ou
aumento de concentração). Estes processos designam-se por processos de substâncias
não conservativas. A contaminação bacteriana resultante de descargas de águas
residuais domésticas em meio marinho, por exemplo, poderá ser modelada
adoptando-se um decaimento de 1ª ordem. O comportamento de muitas outras
substâncias (ou espécies) pode ser razoavelmente aproximado através da consideração
de decaimentos ou crescimentos de 1ª ordem, tais como: carência bioquímica de
oxigénio (CBO), algas, etc.. Os coeficientes (kB) das leis de 1ª ordem deverão ser
estabelecidos preferencialmente a partir dos dados de campo disponíveis ou de análises
laboratoriais. Para fazer reflectir matematicamente este comportamento, o processo
pode ser descrito pela Eq. 4.27 com a introdução do correspondente termo de
crescimento/decaimento. No caso de uma lei de variação de 1ª ordem tem-se:
BkzB
AyB
xB
AzB
wyB
vxB
utB
Bzh −∂∂
+
∂∂
+∂∂
+∂∂
−∂∂
−∂∂
−=∂∂
2
2
2
2
2
2
(4.28)
Os coeficientes de muitas das reacções em condições naturais aumentam com a
temperatura, podendo a dependência da temperatura ser considerada através de uma
equação de correcção derivada da equação de Arrhenius. Assim, uma vez que é prático
determinar os coeficientes a uma temperatura de 20 ºC, o valor dos coeficientes à
temperatura ambiente (T) poderão ser calculados a partir da seguinte expressão:
2020 −= T
BBTB kk θ (4.29)
em que Bθ é o coeficiente de temperatura do constituinte bioquímico B. Aquele
coeficiente apresenta normalmente valores constantes para cada um dos processos
considerados.

Capítulo 4
180
4.4.1.3 Oxigénio dissolvido
O oxigénio dissolvido (OD) é um dos parâmetros ambientais mais utilizado para
caracterizar a qualidade da água em sistemas hídricos. A zona costeira é frequentemente
utilizada como local preferencial para a rejeição final de águas residuais (sujeitas ou não
a tratamento). A análise do impacto provocado por estas descargas poderá ser efectuada
quantificando-se os efeitos, em termos das variações das concentrações de oxigénio
dissolvido na coluna de água, devidos à decomposição da matéria orgânica contida nos
efluentes rejeitados.
Os dois mecanismos primários que governam a distribuição da concentração de OD
num meio hídrico que recebe efluentes são: decomposição da matéria orgânica (a
matéria orgânica biodegradável presente num efluente é normalmente quantificada pela
CBO, que representa a quantidade total de oxigénio necessário para se realizar a
decomposição dessa matéria orgânica pela acção de micro-organismos aeróbios) e
rearejamento (devido essencialmente à transferência de oxigénio realizada na coluna de
água através da interface água-atmosfera, sendo tanto maior quanto maior for o deficit
relativamente à concentração de saturação – OS – e da actividade fotosintética das algas
presentes na coluna de água).
Admitindo-se que as reacções envolvidas neste processo seguem leis de 1ª ordem,
podem escrever-se as equações que definem o balanço de CBO (BCBO) e OD (BOD) na
coluna de água, onde se omite a interacção da interface água-sedimento em termos de
trocas de oxigénio:
CBOdCBO
z
CBOCBOh
CBOCBOCBOCBO
Bkz
BA
yB
xB
Az
Bw
yB
vx
Bu
tB
−∂
∂+
+
∂
∂+
∂∂
+∂
∂−
∂∂
−∂
∂−=
∂∂
2
2
2
2
2
2
(4.30)
( )ODaCBOd
ODz
ODODh
ODODODOD
BOSkBk
zB
AyB
xB
Az
Bw
yB
vx
Bu
tB
−+−
−∂
∂+
∂
∂+
∂∂
+∂
∂−
∂∂
−∂
∂−=
∂∂
2
2
2
2
2
2
(4.31)

4.4 Modelos de qualidade da água
181
em que,
kd é o coeficientes de desoxigenação [dia-1];
ka é o coeficiente de rearejamento [dia-1].
A quantificação de kd poderá ser efectuada em laboratório, existindo na literatura uma
gama de valores e expressões (que são função das características hidrocinemáticas do
sistema) permitindo a definição de um intervalo de variação para o seu valor. A
quantificação do coeficiente de rearejamento apresenta maiores dificuldades e, na
ausência de dados de campo suficientes, o recurso a expressões propostas por diversos
autores constitui uma via possível para a sua quantificação. A dependência da
temperatura poderá ser introduzida através de expressões do tipo representado pela Eq.
4.29.
4.4.1.4 Cadeia alimentar
O conhecimento das relações tróficas nos meios hídricos da zona costeira revela-se de
importância crucial para o sucesso das políticas de gestão ambiental destes sistemas. De
facto, como já foi referido no Capítulo 2, é nas zonas costeiras que crescem e se
desenvolvem a quase totalidade dos recursos biológicos dos ecossistemas marinhos. O
estudo das variações sazonais de produção primária, a influência dos factores
ambientais nos ciclos produtivos, a introdução de substâncias tóxicas na cadeia
alimentar e a influência dos regimes hidrodinâmicos nos ciclos produtivos são assuntos
que têm vindo a ser investigados e onde a modelação matemática começa a tornar-se
uma ferramenta muito valiosa.
Na Figura 4.33 apresentam-se as variáveis de um modelo de cadeia alimentar e as
correspondentes relações tróficas (representadas pelas linhas de ligação) que serão
caracterizadas de seguida.
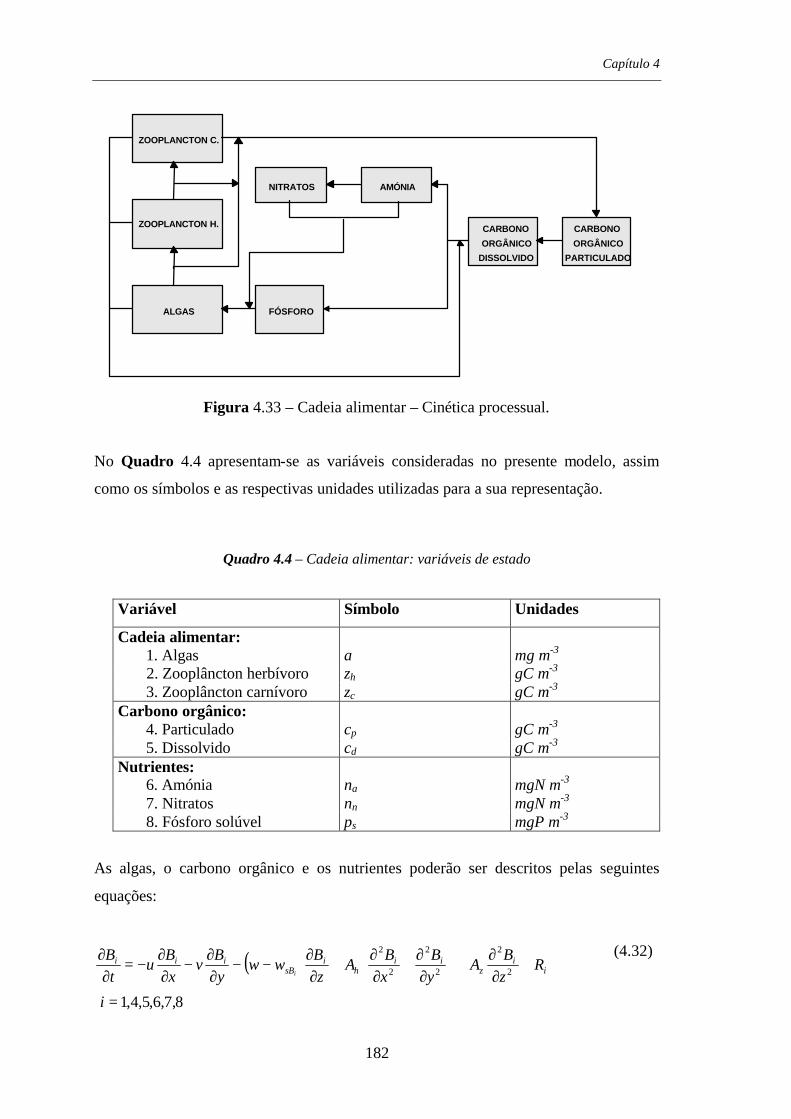
Capítulo 4
182
ZOOPLANCTON C.
ZOOPLANCTON H.
ALGAS FÓSFORO
NITRATOS AMÓNIA
CARBONO
ORGÂNICO
DISSOLVIDO
CARBONO
ORGÂNICO
PARTICULADO
Figura 4.33 – Cadeia alimentar – Cinética processual.
No Quadro 4.4 apresentam-se as variáveis consideradas no presente modelo, assim
como os símbolos e as respectivas unidades utilizadas para a sua representação.
Quadro 4.4 – Cadeia alimentar: variáveis de estado
Variável Símbolo Unidades
Cadeia alimentar: 1. Algas
a
mg m-3
2. Zooplâncton herbívoro zh gC m-3 3. Zooplâncton carnívoro zc gC m-3 Carbono orgânico: 4. Particulado
cp
gC m-3
5. Dissolvido cd gC m-3 Nutrientes: 6. Amónia
na
mgN m-3
7. Nitratos nn mgN m-3 8. Fósforo solúvel ps mgP m-3
As algas, o carbono orgânico e os nutrientes poderão ser descritos pelas seguintes
equações:
( )8,7,6,5,4,1
2
2
2
2
2
2
=
+∂∂
+
∂∂
+∂∂
+∂∂
−−∂∂
−∂∂
−=∂
∂
i
RzB
AyB
xB
AzB
wwyB
vxB
ut
Bi
iz
iih
isB
iiii
(4.32)

4.4 Modelos de qualidade da água
183
em que wsBi representa a velocidade de sedimentação da espécie biológica i. Salienta-se
que esta velocidade poderá ser considerada nula, com excepção das velocidades de
sedimentação relativas às algas e carbono orgânico particulado. As parcelas Ri, dizem
respeito às reacções (transformação de constituintes). Utiliza-se o índice i para
identificação de cada uma das variáveis utilizadas.
As algas apresentam um crescimento que é função da temperatura, da concentração de
nutrientes do meio hídrico e da radiação solar. O seu decaimento deve-se a perdas por
respiração/excreção, predação e sedimentação. Pode-se então estabelecer a seguinte
equação:
( ) ( ) ( ) azaTCaTkaIpnTkR hghrastga ,, ,,, −−= (4.33)
onde,
( )IpnTk stg ,,, é a taxa de crescimento das algas [dia-1];
( )Tkra é a taxa de respiração e excreção das algas [dia-1];
( )hgh zaTC ,, é a taxa de predação das algas, [dia-1];
nt é o azoto total inorgânico [mgN m-3];
As taxas de crescimento e de predação dependem de diversos factores ambientais. Estas
dependências poderão ser estabelecidas por relações funcionais.
No Quadro 4.5 apresentam-se as relações funcionais mais comuns utilizadas em
modelos de produção primária.

Capítulo 4
184
Quadro 4.5 – Formas funcionais mais comuns de modelos de produção primária. Todas as formas são apresentadas como processos de decaimento da variável de estado X. Os parâmetros são: k, taxa de decaimento; k2, constante de semi-saturação; Iv, constante de Ivlev; Xmin, concentração de “refúgio”.
Modelo de comportamento Função
Constante ( )XkdtdX −= ...
Linear ( )XkXdtdX −= ...
Rectilínea ( )XkXdtdX −= ... ou ( )Xk
dtdX −= ...
Michaelis-Menten
( ) XXk
kXdtdX
+
−=2
...
Sigmoid
( ) XXk
kXdtdX
+
−= 222
2
...
Ivlev { }( )( )XXIkdtdX
v−−−= exp1...
Ivlev com refúgio ( ){ }( )( )XXXIkdtdX
v minexp1... −−−−=
A dependência da taxa de crescimento de algas em relação à temperatura, intensidade de
luz e disponibilidade de nutrientes, é dada pela relação:
( ) ( )
++= −
ssp
s
tsn
tTagstg pk
pnk
nIFkIpnTk ,min,,, 20
20, θ (4.34)
em que,
kg,20 é a taxa máxima de crescimento de algas [dia–1];
θa é a factor de temperatura – algas;
F(I) é a função de dependência da intensidade de luz;

4.4 Modelos de qualidade da água
185
ksn é a constante de semi-saturação – azoto [mgN m-3];
ksp é a constante de semi-saturação – fósforo [mgP m-3].
I intensidade da luz [w m-2]
A quantificação do efeito da luz no crescimento de algas apresenta-se bastante
complicada devido à necessidade de se integrar o efeito de diferentes factores, como
sejam: a variação diurna da intensidade da luz, a atenuação da luz à medida que penetra
na coluna de água e a dependência da taxa de crescimento em relação à intensidade da
luz. Embora possa ser utilizada uma função do tipo Michaelis-Menten, a expressão de
Steele é a mais utilizada, uma vez que permite traduzir a diminuição da taxa de
crescimento quando a intensidade da luz ultrapassa o valor óptimo. Esta expressão é
definida por:
( )1+−
= sII
s
eII
IF (4.35)
em que I é a intensidade de luz e Is é a intensidade de luz óptima (intensidade de luz que
permite uma taxa máxima de crescimento de algas, normalmente determinada
experimentalmente).
A intensidade média da luz durante o dia (Ia) pode ser calculada a partir da seguinte
expressão:
=
π2
ma II (4.36)
onde Im é a intensidade máxima da luz.
A variação da intensidade de luz com a profundidade pode ser modelada pela lei de
Beer-Lambert:
( ) zkeeIzI −= 0 (4.37)
Capítulo 4
186
em que I0 é a intensidade de luz à superfície e ke é um coeficiente de extinção da luz.
Este último coeficiente pode ser relacionado com outras grandezas, como por exemplo a
concentração de algas na coluna de água:
32' 054.0 0088.0 aakk ee ++= (4.38)
A constante 'ek pode ser determinada directamente ou relacionada com outras variáveis.
Finalmente, poderemos definir a função F(I) substituindo a Eq. 4.37 na expressão de
Steele (Eq. 4.35):
( )1+−−
−
= s
zeka
eIeI
s
zka e
IeI
IF
(4.39)
Voltando novamente à Eq. 4.33, a taxa correspondente à respiração poderá sofrer uma
correcção de temperatura de acordo com uma expressão do tipo já anteriormente
utilizada para outras variáveis:
( ) 2020,
−= Trarara kTk θ (4.40)
sendo raθ o factor de temperatura para a respiração de algas.
A taxa de predação das algas apresenta uma dependência em relação à temperatura e
relativamente à concentração de algas (relação funcional do tipo Michaelis-Menten, o
que corresponde a considerar que a taxa de predação se mantém em patamar para
valores elevados de concentração de algas):
( ) hTghg
sahgh zC
aka
zaTC 20,, −
+= θ
(4.41)

4.4 Modelos de qualidade da água
187
em que ksa é a constante de semi-saturação para algas (mgChla m-3), θgh é o factor de
temperatura do zooplâncton herbívoro e Cg é a taxa de ingestão de algas pelo
zooplâncton herbívoro (L mgC-1 dia-1).
Parte das algas ingeridas é transformada em zooplâncton herbívoro. Por sua vez, o
zooplâncton herbívoro diminui devido à actividade dos seus predadores (zooplâncton
carnívoro) e por perdas por respiração e excreção. A equação de reacção é dada por:
( ) ( ) ( ) hrhhcgchghhcaz zTkzzTCazaTCaRh
, ,, −−= ε (4.42)
onde,
caa é a razão de conversão da clorofila-a das algas em carbono do
zooplâncton [gC mgChla-1];
hε é a eficiência de predação de algas;
( )cgc zTC , é a taxa de predação de zooplâncton carnívoro [dia-1].
A taxa por predação de zooplâncton carnívoro será dada por:
( ) cTgcgccgc zCzTC 20, −= θ (4.43)
em que θgc é o factor de temperatura do zooplâncton carnívoro.
Parte do zooplâncton herbívoro é transformado em zooplâncton carnívoro. Este último,
por sua vez, sofre perdas por respiração/excreção e devido à mortalidade provocada por
outros predadores da cadeia alimentar. A equação de reacção é então definida por:
( ) ( ) ( ) cdccrchcgccz zTkzTkzzTCRc
, −−= ε (4.44)
sendo krc e kdc as taxas de respiração e mortalidade respectivamente. Estas são
dependentes da temperatura ambiente, pelo que se utilizam factores de correcção de
temperatura análogos aos anteriormente apresentados.

Capítulo 4
188
O carbono orgânico particulado resulta da fracção ineficiente de predação assim como
da morte do zooplâncton carnívoro. Os sumidouros deste constituinte resultam de uma
reacção de dissolução. Assim:
( ) ( ) ( ) ( ) ( ) ( ) ppcdchcgcchghhcac cTkzTkzzTCazaTCaRp
, 1 ,, 1 −+−+−= εε (4.45)
em que kp representa a taxa de dissolução, do carbono orgânico.
O carbono orgânico dissolvido, por sua vez, é transformado por hidrólise (a uma taxa
kh):
( ) ( ) dhppc cTkcTkRd
−= (4.46)
Os nutrientes considerados na cadeia alimentar são o azoto e fósforo inorgânicos. O
primeiro é dividido em amónia e nitrato. A equação de reacção para a amónia vem:
( ) ( ) ( ) ( )( ) ( ) anstgnaam
crcnchrhncranadhncn
nTkaIpnTkaF
zTkazTkaaTkacTkaRa
,,,
−−
−+++=
(4.47)
em que kn é uma taxa de nitrificação e Fam é a fracção de azoto da quantidade de amónia
existente que é consumida pelas algas, sendo dada por:
aam
aam nk
nF
+=
(4.48)
A constante de semi-saturação de preferência da amónia é representada por kam; anc e ana
são coeficientes de conversão de azoto para carbono e clorofila, respectivamente.
As equações de reacção de nitrato e fósforo são as seguintes:
( ) ( ) aIpnTkaFnTkR stgnaamanni ),,,( 1 −−= (4.49)

4.4 Modelos de qualidade da água
189
( ) ( ) ( ) ( ) ( )aIpnTkazTkazTkaaTkacTkaR stgpacrcpchrhpcrapadhpcp ,,, −+++=
(4.50)
apc e apa são coeficientes de conversão de fósforo para carbono e clorofila-a,
respectivamente.
Utilizando as cinéticas definidas pelas equações 4.33 a 4.50, a produção primária em
zonas costeiras poderá ser modelada desde que se disponha de ferramentas que
permitam efectuar a integração do sistema de equações definido pelas referidas
equações.
4.4.2 Programa PROCESSOS
4.4.2.1 Características Gerais
Os processos definidos no ponto anterior, quando o campo de velocidades é nulo,
podem ser descritos matematicamente por um sistema de equações diferenciais
ordinárias. Existem diversos métodos numéricos para efectuar a integração de sistemas
de equações diferenciais ordinárias (Thomas, 1995), situando-se os métodos de
Runge-Kutta entre os mais eficientes. O programa PROCESSOS, desenvolvido no
âmbito deste trabalho, utiliza um método de Runge-Kutta de 4ª ordem para integrar
sistemas de equações do tipo:
( ) ( ) NiyyytRdtyd
Nii ,..,1 ,...,,, 21 ==
(4.51)
em que yi são as variáveis dependentes, t o tempo e N o número total de variáveis.
Neste programa, as derivadas temporais de cada uma das equações foram previamente
programadas em função do processo a modelar, sendo este definido pelo utilizador do
programa. O método de Runge-Kutta está implementado numa subrotina independente,
permitindo a integração de sistemas de equações diferenciais definidos de acordo com o
processo seleccionado.

Capítulo 4
190
Na Figura 4.34 apresenta-se o fluxograma do programa, estando representadas as
etapas fundamentais de cálculo.
Numa primeira fase são definidos todos os coeficientes que permitem a quantificação
dos segundos membros das equações, os valores iniciais das variáveis dependentes e o
intervalo de integração.
INÍCIO
SELECCÇÃO DO PROCESSO
DEFINIÇÃO DE PARÂMETROS
CICLO DE INTEGRAÇÃO
TINICIAL, TFINAL
RUNGE-KUTTA
RESULTADOS (TFINAL)
FIM
Figura 4.34 – Fluxograma do programa PROCESSOS.
4.4.2.2 – Exemplo de Aplicação
A título ilustrativo, apresenta-se um exemplo correspondente a uma versão simplificada
de um modelo de uma cadeia alimentar em que apenas são consideradas duas variáveis:
algas e zooplâncton (herbívoro). Este modelo corresponde a uma das diferentes versões
dos modelos gerais do tipo predador-presa e que são normalmente conhecidos por
modelos de Lotka-Volterra (Chapra, 1997). As equações de balanço de massa para as
duas variáveis são dadas por:
( ) azCakkdtda
gzrag −−= (4.52)
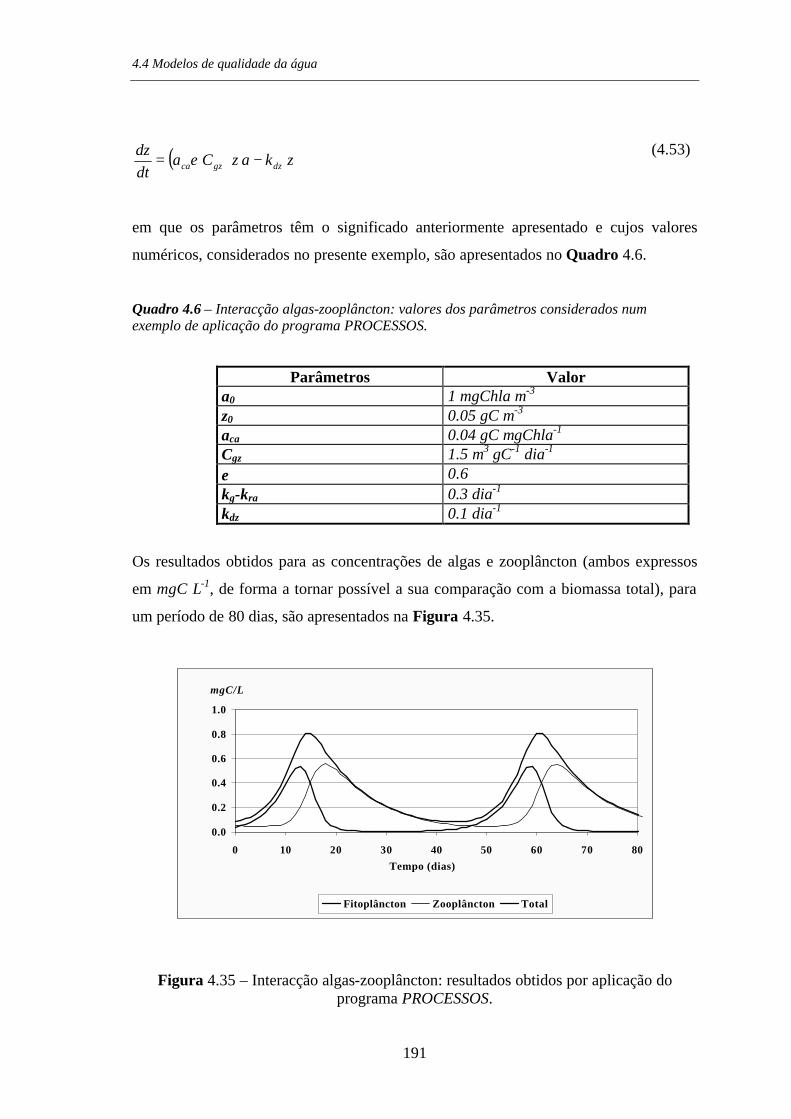
4.4 Modelos de qualidade da água
191
( ) zkazCadtdz
dzgzca −= ε (4.53)
em que os parâmetros têm o significado anteriormente apresentado e cujos valores
numéricos, considerados no presente exemplo, são apresentados no Quadro 4.6.
Quadro 4.6 – Interacção algas-zooplâncton: valores dos parâmetros considerados num exemplo de aplicação do programa PROCESSOS.
Parâmetros Valor a0 1 mgChla m-3
z0 0.05 gC m-3 aca 0.04 gC mgChla-1 Cgz 1.5 m3 gC-1 dia-1 ε 0.6 kg-kra 0.3 dia-1 kdz 0.1 dia-1
Os resultados obtidos para as concentrações de algas e zooplâncton (ambos expressos
em mgC L-1, de forma a tornar possível a sua comparação com a biomassa total), para
um período de 80 dias, são apresentados na Figura 4.35.
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50 60 70 80Tempo (dias)
mgC/L
Fitoplâncton Zooplâncton Total
Figura 4.35 – Interacção algas-zooplâncton: resultados obtidos por aplicação do programa PROCESSOS.
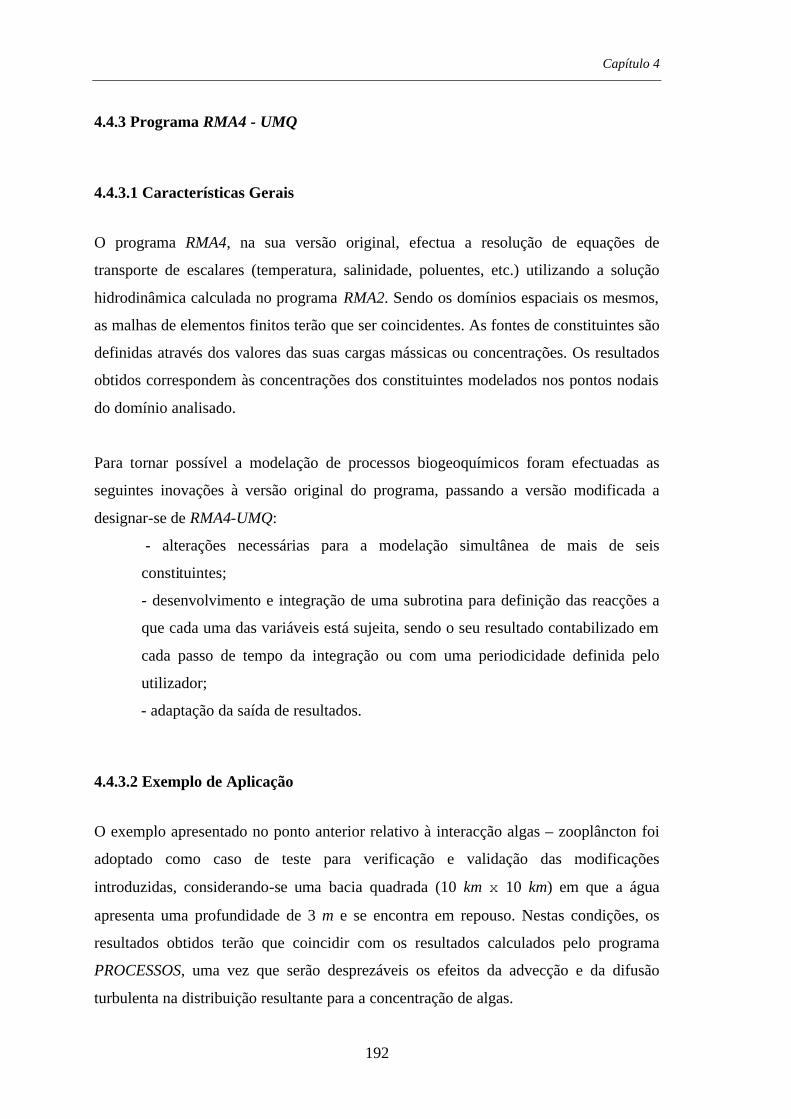
Capítulo 4
192
4.4.3 Programa RMA4 - UMQ
4.4.3.1 Características Gerais
O programa RMA4, na sua versão original, efectua a resolução de equações de
transporte de escalares (temperatura, salinidade, poluentes, etc.) utilizando a solução
hidrodinâmica calculada no programa RMA2. Sendo os domínios espaciais os mesmos,
as malhas de elementos finitos terão que ser coincidentes. As fontes de constituintes são
definidas através dos valores das suas cargas mássicas ou concentrações. Os resultados
obtidos correspondem às concentrações dos constituintes modelados nos pontos nodais
do domínio analisado.
Para tornar possível a modelação de processos biogeoquímicos foram efectuadas as
seguintes inovações à versão original do programa, passando a versão modificada a
designar-se de RMA4-UMQ:
- alterações necessárias para a modelação simultânea de mais de seis
constituintes;
- desenvolvimento e integração de uma subrotina para definição das reacções a
que cada uma das variáveis está sujeita, sendo o seu resultado contabilizado em
cada passo de tempo da integração ou com uma periodicidade definida pelo
utilizador;
- adaptação da saída de resultados.
4.4.3.2 Exemplo de Aplicação
O exemplo apresentado no ponto anterior relativo à interacção algas – zooplâncton foi
adoptado como caso de teste para verificação e validação das modificações
introduzidas, considerando-se uma bacia quadrada (10 km x 10 km) em que a água
apresenta uma profundidade de 3 m e se encontra em repouso. Nestas condições, os
resultados obtidos terão que coincidir com os resultados calculados pelo programa
PROCESSOS, uma vez que serão desprezáveis os efeitos da advecção e da difusão
turbulenta na distribuição resultante para a concentração de algas.
4.4 Modelos de qualidade da água
193
O domínio foi discretizado numa malha de 256 elementos quadrangulares de oito nós.
Na Figura 4.36 apresentam-se os resultados obtidos num dos pontos nodais ao longo do
tempo de integração, semelhantes aos obtidos para os restantes pontos do domínio e
coincidentes com os que foram obtidos no exemplo apresentado em 4.4.2.2.
0
0,1
0,2
0,3
0,4
0,5
0,6
0 500 1000 1500 2000 2500 3000 3500 4000
Tempo (horas)
Concentração (mgC/L)
Fitoplâncton Zooplâncton
Figura 4.36 – Interacção algas-zooplâncton: resultados obtidos por aplicação do programa RMA4-UMQ.
4.4.4 Programa POM-UMQ
4.4.4.1 Características Gerais
O programa POM-UMQ foi desenvolvido de forma a possibilitar a modelação conjunta
das condições hidrodinâmicas e de processos biogeoquímicos de sistemas costeiros.
Os principais desenvolvimentos consistiram na inclusão de mais uma equação de
transporte por cada uma das variáveis de estado consideradas na modelação de um
determinado processo e na criação de uma subrotina que permite a consideração das
reacções entre constituintes que foram acrescentados ao conjunto de variáveis do
modelo.

Capítulo 4
194
ADVUADVV
PROFUPROFV
BCOND(3)
-Vel. vertical (σ)
-Cond. fronteira:w
BCOND(1)
ADVCTBAROPG
VERTVLBCOND(5)
ADVQ(Q2)ADVQ(Q2L)
PROFQBCOND(6)
ADVT(T)ADVT(S)
PROFT(T)PROFT(S)BCOND(4)
ADVAVE
BCOND(2)
INÍCIO
FIM
DEFINIÇÃO DE PARÂMETROSMALHA
CONDIÇÕES INICIAIS
CICLOMODO INTERNO
II=1, IEND
RESULTADOS
-Adv. e difusão:u e v
-Massa volúmica
CICLOMODO EXTERNO
IE=1, ISPLIT
AJUSTA u e v(Integral vertical de u e v = médiada velocidade do modo externo)
ELEVAÇÃO DA SUPERFÍCIELIVRE
VELOCIDADES U E V
MÉDIAS TEMPORAIS DEU E V
-Adv. e dif. hor.: Q2 e Q2L-Dif. vert.:Q2,Q2L-Cond. fronteira Q2 e Q2L
-Adv. e dif. hor.:T-Adv. e dif. hor.:S-Dif. vert.:T-Dif. vert.:S-Cond. front.: T,S
-Adv. e dif. hor.:u-Adv. e dif. hor.:v-Dif. vert.:u-Dif. vert.:v-Cond. front.: u,v
-Cond. fronteira:Elevação da
superfície livre
-Adv. e difusão: U e V
-Cond. fronteira: U e V
QUALIDADE DA ÁGUAPARÂMETROS
CONDIÇÕES INICIAIS
ADVECÇÃO+DIFUSÃOCONSTITUINTES
CONDIÇÕES FRONTEIRA
PROCESSOS
Figura 4.37 – Algoritmo do programa POM-UMQ com indicação das inovações introduzidas no programa POM.
O método de resolução das equações relativas a cada uma das novas equações é análogo
ao que o modelo utiliza para a resolução das equações relativas ao transporte da
temperatura e salinidade. Os desenvolvimentos efectuados no algoritmo original são
apresentados na Figura 4.37.

4.4 Modelos de qualidade da água
195
4.4.4.1 Exemplo de aplicação
A zona costeira é muitas vezes utilizada como meio de rejeição final de águas residuais
produzidas por agregados populacionais litorais, permanentes ou temporários,
nomeadamente através de soluções técnicas em que se recorre à utilização de emissários
submarinos. As ferramentas de modelação matemática, conjuntamente com a realização
de campanhas de monitorização do estado de qualidade da água, poderão constituir um
elemento de análise muito útil quer na fase de projecto quer na fase de operação daquele
tipo de infra-estruturas.
No presente exemplo, tendo como objectivo mostrar as potencialidades do programa
POM-UMQ, considera-se um modelo hidrodinâmico e de qualidade da água referente a
uma zona costeira onde, através das simulações efectuadas, se pretende avaliar o
impacto da descarga de um exutor submarino (Figura 4.38). Consideram-se dois
cenários hidrodinâmicos independentes: uma corrente constante na direcção Sul-Norte
(impõe-se uma velocidade de 0,20 ms-1 na fronteira Sul) e uma maré do tipo
semi-diurno com uma amplitude de 1,5 m. O indicador escolhido para a caracterização
do estado de qualidade da água é a concentração em coliformes totais. Esta variável
apresenta um comportamento não conservativo, que poderá ser modelado por uma lei de
1ª ordem. A taxa de decaimento (kB) apresenta um intervalo de variação muito amplo (0
a 84 dia-1, segundo Thomann e Mueller, 1987). Assim, foram efectuadas simulações
para os dois cenários hidrodinâmicos considerando-se dois valores distintos para a taxa
de decaimento: 1 e 10 dia-1. Finalmente, foram considerados dois comprimentos para o
exutor: 2000 m e 2500 m. Em ambos os casos mantém-se constante o comprimento do
difusor. A descarga é simulada admitindo-se que a concentração de coliformes na zona
junto do difusor (após a diluição inicial) se mantém constante e igual a
10000 NMP/100 mL, desprezando-se o caudal das águas residuais.
Apresentam-se a seguir diversos resultados, relativos às simulações efectuadas, devendo
ser interpretados apenas do ponto de vista qualitativo, dadas as hipóteses simplificativas
consideradas na formulação do problema em análise. Pretende-se realçar as
potencialidades da aplicação do programa desenvolvido na resolução de problemas
práticos de engenharia.

Capítulo 4
196
1000 2000 3000 4000 5000
N
S
W E
2000
4000
6000
8000
10000
x [m]
y [m]
20,0
19,0
18,0
17,0
16,0
15,0
14,0
13,0
Profundidade (m)
EXUTORL= 2500 m
DIFUSOR – 500 m
EXUTORL= 2000 m
DIFUSOR – 500 m
LINHADE
COSTA
Figura 4.38 – Exemplo de aplicação do programa POM-UMQ: geometria e localização do exutor.
Os resultados apresentados nas Figuras 4.39 e 4.40 evidenciam a forte sensibilidade da
extensão afectada pela descarga ao valor definido para o coeficiente de decaimento dos
coliformes totais. A área afectada pela descarga do exutor (considerando a área no
interior da qual a concentração é igual ou superior a 2000 NMP/100 mL) duplica quando
o coeficiente de decaimento passa de 10 dia-1 para 1 dia-1. O sucesso numa determinada
aplicação da modelação matemática depende muito da quantidade e qualidade de
informação disponível sobre o problema em análise. Assim, em problemas reais, a
quantificação dos parâmetros utilizados no modelo deverá ser realizada a partir de
dados de campo ou, na impossibilidade de realização de campanhas para a sua
quantificação, os resultados apresentados deverão conter sempre análises de
sensibilidade aos valores adoptados para os parâmetros mais importantes.

4.4 Modelos de qualidade da água
197
1000 2000 3000 4000 5000
N
S
W E
2000
4000
6000
8000
10000
x [m]
y [m]
1000 2000 3000 4000 5000
2000
4000
6000
8000
10000
x [m]
y [m]
1000 2000 3000 4000 5000
2000
4000
6000
8000
10000
x [m]
y [m]
1000 2000 3000 4000 5000
2000
4000
6000
8000
10000
x [m]
y [m]
Concentração(NMP/100 mL)
2000
1800
1600
1400
1200
1000
800
600
400
0,0
200
kB=10 dia-1 kB=10 dia-1
kB=1 dia-1 kB=1 dia-1
Figura 4.39 – Exemplo de aplicação do programa POM-UMQ: resultados da concentração de coliformes totais à profundidade de 9 m, um dia após o início da descarga, considerando a acção da maré do tipo semi-diurno (amplitude 1,5 m).
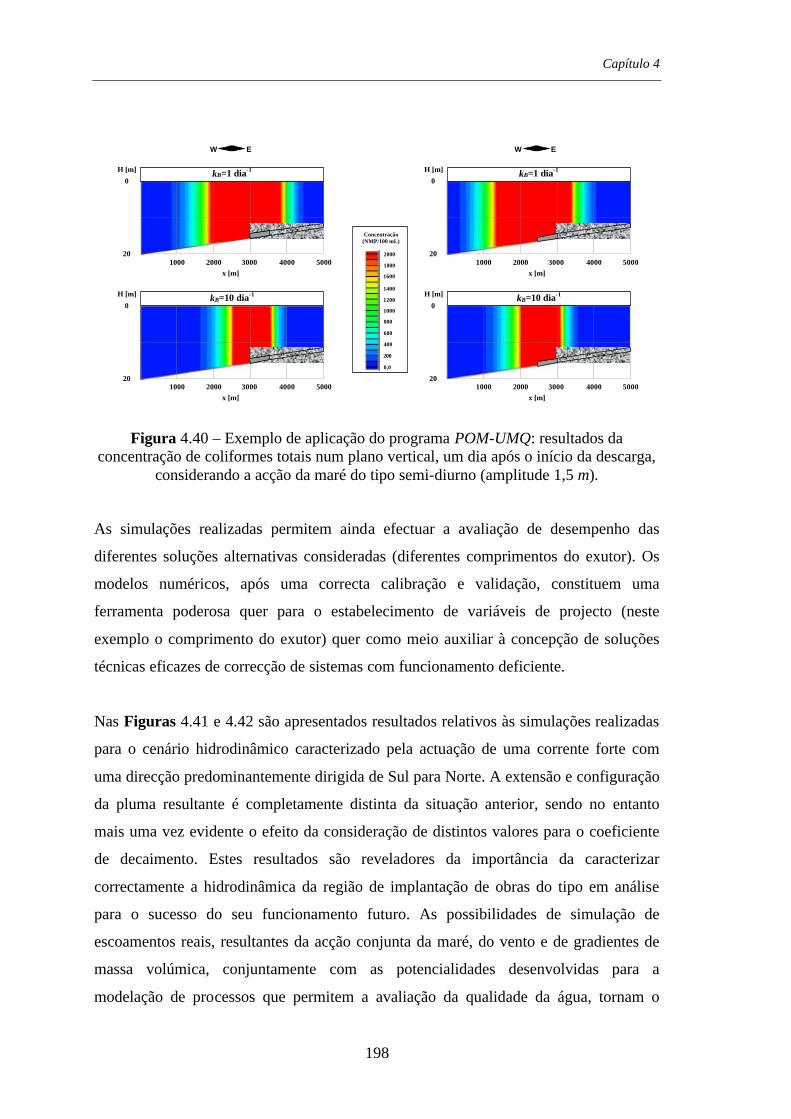
Capítulo 4
198
1000 2000 3000 4000 500020
0
x [m]
H [m]
1000 2000 3000 4000 500020
0
x [m]
H [m]
Concentração(NMP/100 mL)
2000
1800
1600
1400
1200
1000
800
600
400
0,0
200
kB=1 dia-1 kB=1 dia-1
W E
1000 2000 3000 4000 500020
0
x [m]
H [m]
1000 2000 3000 4000 500020
0
x [m]
H [m]kB=10 dia-1 kB=10 dia-1
W E
Figura 4.40 – Exemplo de aplicação do programa POM-UMQ: resultados da concentração de coliformes totais num plano vertical, um dia após o início da descarga,
considerando a acção da maré do tipo semi-diurno (amplitude 1,5 m).
As simulações realizadas permitem ainda efectuar a avaliação de desempenho das
diferentes soluções alternativas consideradas (diferentes comprimentos do exutor). Os
modelos numéricos, após uma correcta calibração e validação, constituem uma
ferramenta poderosa quer para o estabelecimento de variáveis de projecto (neste
exemplo o comprimento do exutor) quer como meio auxiliar à concepção de soluções
técnicas eficazes de correcção de sistemas com funcionamento deficiente.
Nas Figuras 4.41 e 4.42 são apresentados resultados relativos às simulações realizadas
para o cenário hidrodinâmico caracterizado pela actuação de uma corrente forte com
uma direcção predominantemente dirigida de Sul para Norte. A extensão e configuração
da pluma resultante é completamente distinta da situação anterior, sendo no entanto
mais uma vez evidente o efeito da consideração de distintos valores para o coeficiente
de decaimento. Estes resultados são reveladores da importância da caracterizar
correctamente a hidrodinâmica da região de implantação de obras do tipo em análise
para o sucesso do seu funcionamento futuro. As possibilidades de simulação de
escoamentos reais, resultantes da acção conjunta da maré, do vento e de gradientes de
massa volúmica, conjuntamente com as potencialidades desenvolvidas para a
modelação de processos que permitem a avaliação da qualidade da água, tornam o

4.4 Modelos de qualidade da água
199
programa adaptado uma ferramenta especialmente vocacionada para análises de
problemas complexos em zonas costeiras.
1000 2000 3000 4000 5000
N
S
W E
5500
7500
9500
11500
13500
x [m]
y [m]
1000 2000 3000 4000 5000
5500
7500
9500
11500
13500
x [m]
y [m]
Concentração(NMP/100 mL)
2000
1800
1600
1400
1200
1000
800
600
400
0,0
200
kB=1 dia-1 kB=10 dia-1
3500 3500
Figura 4.41 – Exemplo de aplicação do programa POM-UMQ: resultados da concentração de coliformes totais à profundidade de 9 m, seis horas após o inicio da
descarga, considerando uma corrente no sentido Sul-Norte.
5500 7500 9500 11500 13500y [m]
H [m]
Concentração(NMP/100 mL)
2000
1800
1600
1400
1200
1000
800
600
400
0,0
200
kB=1 dia-1
3500
0
10
NS
5500 7500 9500 11500 13500y [m]
H [m]
kB=10 dia-1
3500
0
10
Figura 4.42 – Exemplo de aplicação do programa POM-UMQ: resultados da concentração de coliformes totais num plano vertical, seis horas após o inicio da
descarga, considerando uma corrente no sentido Sul-Norte
Capítulo 4
200
4.5 Ferramentas de pré e pós-processamento
Para além das adaptações efectuadas nas versões originais dos programas de
hidrodinâmica e de qualidade da água necessárias à realização do pós-processamento
dos seus resultados no programa SMS, são apresentadas neste ponto metodologias
desenvolvidas para integração da informação relevante produzida pelos modelos
numéricos em Sistemas de Informação Geográfica. Complementarmente, é apresentado
um método de geração condicionada de malhas não estruturadas de elementos finitos.
4.5.1 Metodologia de criação dos Sistemas de Informação Geográfica
Os dados obtidos a partir das campanhas de amostragem e os resultados dos modelos
utilizados estão referidos, no primeiro caso, aos pontos de amostragem e, no segundo
caso, aos nós de malhas utilizadas para a discretização do domínio espacial. Assim, a
representação espacial de uma determinada variável implica a utilização de uma
transformação do tipo ponto-para-área. Esta transformação deverá ser bi-direccional
para permitir o estabelecimento, por exemplo, das condições iniciais a utilizar numa
determinada simulação (a partir da interpolação de um campo escalar obtido através das
campanhas de amostragem para a malha de elementos finitos utilizada, correspondendo
neste caso a uma transformação do tipo área-para-ponto). Existem diversos métodos de
conversão de variáveis pontuais para áreas dividindo-se em dois grandes grupos de
conversões: transformações com interpolação e transformações sem interpolação
(Bonham-Carter, 1993).
Embora existam diversos trabalhos sobre a integração de modelos dinâmicos em
ambientes de SIG (como por exemplo em estudos de análise de evolução da ocupação
do solo (Mikula et al, 1996)), neste trabalho a evolução temporal de uma determinada
variável é efectuada recorrendo-se à visualização de mapas referentes a instantes
distintos. Assim, a ferramenta de SIG utilizada não utiliza funções específicas para a
análise temporal. A metodologia de integração da informação georeferenciada, relativa
aos modelos hidrodinâmicos e de qualidade da água, ilustrada na Figura 4.43, apresenta
as seguintes fases principais:
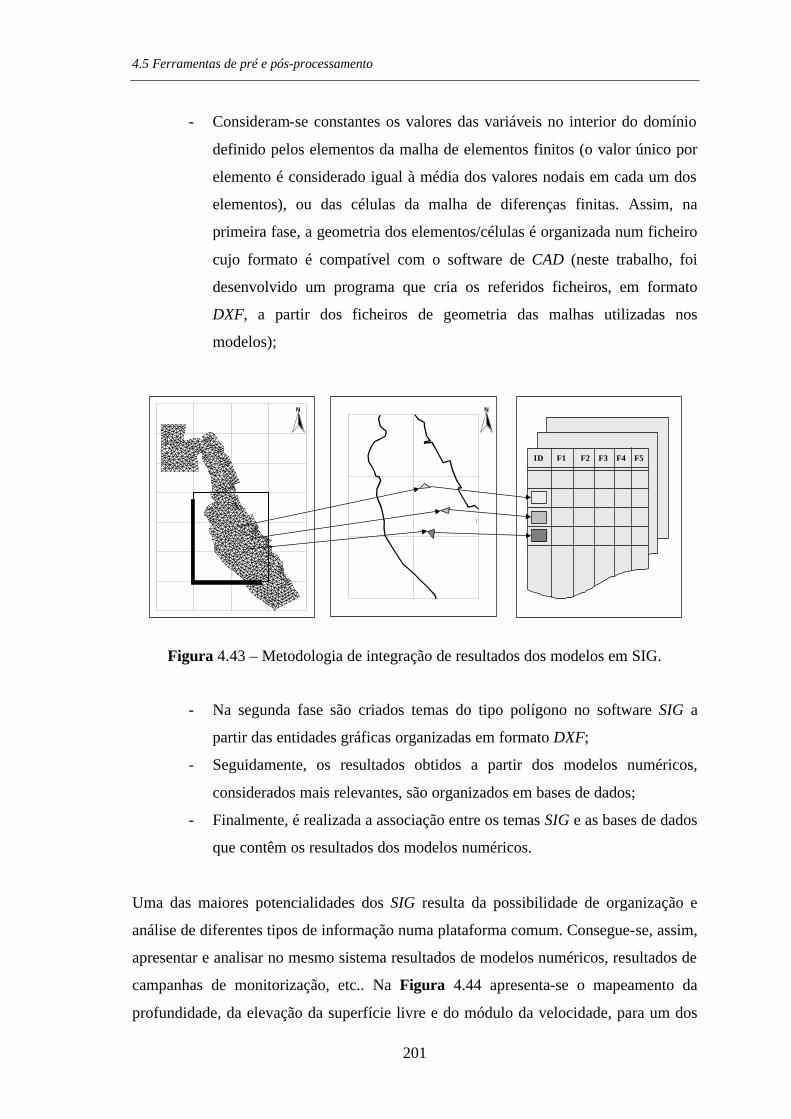
4.5 Ferramentas de pré e pós-processamento
201
- Consideram-se constantes os valores das variáveis no interior do domínio
definido pelos elementos da malha de elementos finitos (o valor único por
elemento é considerado igual à média dos valores nodais em cada um dos
elementos), ou das células da malha de diferenças finitas. Assim, na
primeira fase, a geometria dos elementos/células é organizada num ficheiro
cujo formato é compatível com o software de CAD (neste trabalho, foi
desenvolvido um programa que cria os referidos ficheiros, em formato
DXF, a partir dos ficheiros de geometria das malhas utilizadas nos
modelos);
N N
ID F1 F2 F3 F4 F5
Figura 4.43 – Metodologia de integração de resultados dos modelos em SIG.
- Na segunda fase são criados temas do tipo polígono no software SIG a
partir das entidades gráficas organizadas em formato DXF;
- Seguidamente, os resultados obtidos a partir dos modelos numéricos,
considerados mais relevantes, são organizados em bases de dados;
- Finalmente, é realizada a associação entre os temas SIG e as bases de dados
que contêm os resultados dos modelos numéricos.
Uma das maiores potencialidades dos SIG resulta da possibilidade de organização e
análise de diferentes tipos de informação numa plataforma comum. Consegue-se, assim,
apresentar e analisar no mesmo sistema resultados de modelos numéricos, resultados de
campanhas de monitorização, etc.. Na Figura 4.44 apresenta-se o mapeamento da
profundidade, da elevação da superfície livre e do módulo da velocidade, para um dos

Capítulo 4
202
instantes da simulação realizada no programa RMA2, coincidente com a enchente no
estuário do Rio Cávado. Complementarmente evidenciam-se as zonas em que,
simultaneamente, se verificam as seguintes condições: módulo da velocidade superior a
0,5 m s-1 e profundidade superior a 1,0 m.
N N
N N
Figura 4.44 – Resultados de modelos hidrodinâmicos processados e analisados em ambiente de SIG.

4.5 Ferramentas de pré e pós-processamento
203
A representação espacial de dados resultantes de campanhas de amostragem poderá ser
realizada recorrendo-se a um método (sem interpolação) baseado na definição de
polígonos de Thissen (também conhecido por diagrama de Voronoi). A cada um dos
pontos de amostragem é associada uma área de influência, conforme se apresenta na
Figura 4.45 a). Desta forma, pode-se realizar o mapeamento de qualquer parâmetro
medido (admitindo-se a hipótese simplificativa de que o valor pontual é representativo
dos valores em todo o polígono) e, utilizando as potencialidades de análise dos SIG,
proceder ao cálculo de novos parâmetros. No exemplo apresentado (Figura 4.45 b)),
estima-se o valor da massa de P1 em cada um dos dez pontos a partir dos valores das
concentrações medidas, das áreas de cada um dos polígonos e da profundidade média
(Figura 4.44) calculada pelo modelo hidrodinâmico. Os valores das massas calculadas
no SIG são apresentados no Quadro 4.7.
#þ
#þ#þ
#þ#þ
#þ
#þ
#þ
#þ
#þ
1
2
3
4
5
67
8
9
10
N
þ
1,57 – 2,30
2,30 – 4,25
4,25 – 5,01
5,01 – 7,13
7,13 – 8,59
Concentração – P1[mg/L]
Ponto de amostragem
Massa de P1[2328 kg]
a) b)
Figura 4.45 – Resultados de modelos hidrodinâmicos processados e analisados em ambiente de SIG.
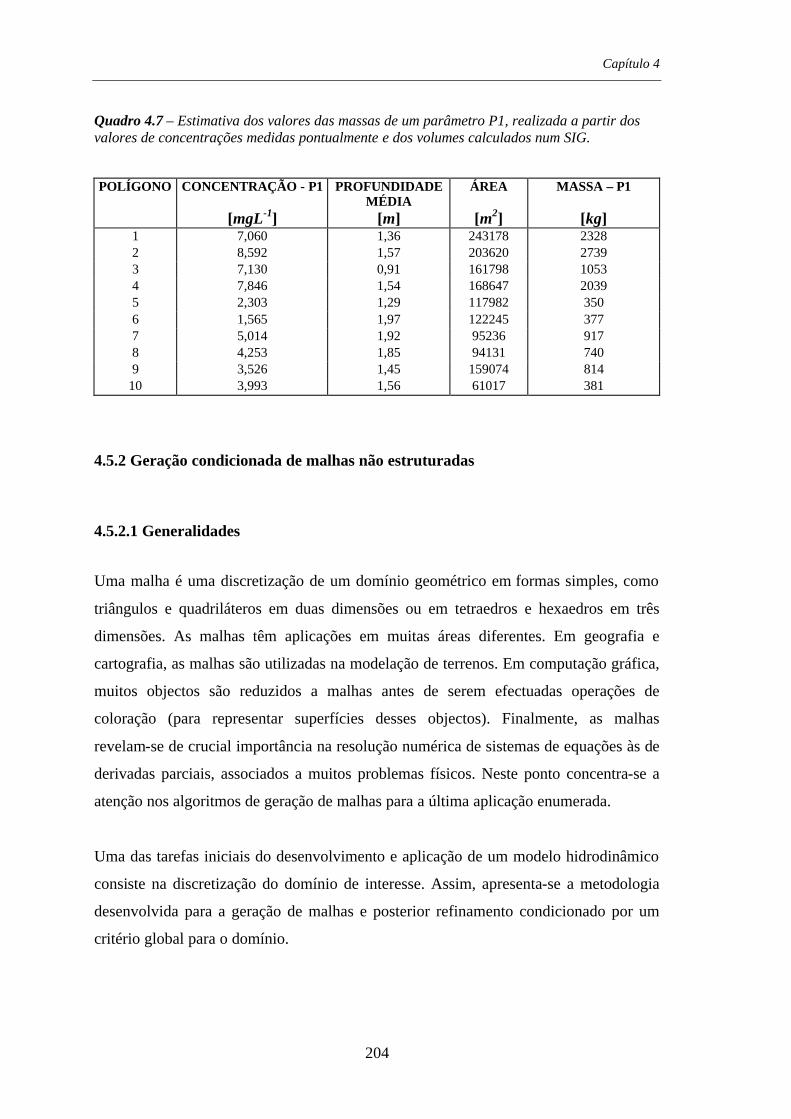
Capítulo 4
204
Quadro 4.7 – Estimativa dos valores das massas de um parâmetro P1, realizada a partir dos valores de concentrações medidas pontualmente e dos volumes calculados num SIG.
POLÍGONO CONCENTRAÇÃO - P1 PROFUNDIDADE MÉDIA
ÁREA MASSA – P1
[mgL-1] [m] [m2] [kg] 1 7,060 1,36 243178 2328 2 8,592 1,57 203620 2739 3 7,130 0,91 161798 1053 4 7,846 1,54 168647 2039 5 2,303 1,29 117982 350 6 1,565 1,97 122245 377 7 5,014 1,92 95236 917 8 4,253 1,85 94131 740 9 3,526 1,45 159074 814
10 3,993 1,56 61017 381
4.5.2 Geração condicionada de malhas não estruturadas
4.5.2.1 Generalidades
Uma malha é uma discretização de um domínio geométrico em formas simples, como
triângulos e quadriláteros em duas dimensões ou em tetraedros e hexaedros em três
dimensões. As malhas têm aplicações em muitas áreas diferentes. Em geografia e
cartografia, as malhas são utilizadas na modelação de terrenos. Em computação gráfica,
muitos objectos são reduzidos a malhas antes de serem efectuadas operações de
coloração (para representar superfícies desses objectos). Finalmente, as malhas
revelam-se de crucial importância na resolução numérica de sistemas de equações às de
derivadas parciais, associados a muitos problemas físicos. Neste ponto concentra-se a
atenção nos algoritmos de geração de malhas para a última aplicação enumerada.
Uma das tarefas iniciais do desenvolvimento e aplicação de um modelo hidrodinâmico
consiste na discretização do domínio de interesse. Assim, apresenta-se a metodologia
desenvolvida para a geração de malhas e posterior refinamento condicionado por um
critério global para o domínio.

4.5 Ferramentas de pré e pós-processamento
205
4.5.2.2 Tipos de domínios geométricos
A primeira distinção entre domínios é efectuada de acordo com a sua dimensão:
bidimensionais ou tridimensionais. Distinguem-se quatro tipos de domínios planos,
como se apresenta na Figura 4.46. Um polígono simples inclui a sua fronteira e o seu
interior. Um polígono com ilhas é basicamente um polígono simples subtraído do
interior de outros polígonos simples; a sua fronteira contém mais do que um contorno
fechado. Um domínio múltiplo é ainda mais genérico, permitindo-se neste caso a
existência de fronteiras internas. Os domínios múltiplos são utilizados na modelação de
objectos formados por mais do que um material. Domínios curvos permitem a existência
de fronteiras curvas. Tal como no primeiro tipo de domínio apresentado, os domínios
curvos poderão ou não conter ilhas e fronteiras internas.
a) b) c) d)
Figura 4.46 - Tipos de domínios bidimensionais em planta: a) polígono simples; b) polígono com ilhas; c) domínio múltiplo; d) domínio curvo.
Os domínios tridimensionais podem ser discretizados em diferentes tipos análogos aos
apresentados para os domínios bidimensionais.
4.5.2.3 Tipos de malhas
Uma malha estruturada é uma malha em que todos os vértices interiores são
topologicamente similares. De acordo com as designações da teoria de gráficos, uma
malha estruturada é um subgráfico de um gráfico periódico infinito tal como uma
grelha. Uma malha não estruturada é uma malha em que os vértices apresentam um
conjunto local arbitrário de vértices vizinhos. Uma malha estruturada por blocos ou

Capítulo 4
206
malha híbrida é formada por um número reduzido de malhas estruturadas, organizadas
numa configuração de forma não estruturada.
Geralmente, as malhas estruturadas apresentam uma forma simples de definição dos
dados que as constituem, enquanto que as malhas não estruturadas apresentam maiores
facilidades em termos de adaptabilidade (aumento/diminuição de resolução baseadas
numa malha inicial), permitindo uma melhor adaptação a domínios complexos. As
malhas híbridas conjugam as vantagens dos dois tipos de malhas anteriores, mas a sua
geração não é ainda possível através de processos totalmente automáticos. Neste ponto
discutem-se com maior profundidade as malhas não estruturadas, uma vez que é este o
tipo de malha utilizado pelos modelos hidrodinâmicos.
À divisão entre malhas bidimensionais estruturadas e não estruturadas associa-se
normalmente um outro tipo de divisão relacionado com o tipo de elemento utilizado:
malhas estruturadas utilizam normalmente quadriláteros e malhas não estruturadas
utilizam triângulos. Não existe contudo nenhuma razão para que tal aconteça. De facto,
é sempre possível subdividir os elementos por forma a converter triângulos em
quadriláteros e vive-versa (ver Figura 4.47).
a) b)
Figura 4.47 - a) triangulação de quadriláteros; b) Divisão de triângulos para formar quadriláteros
As variadas técnicas para a geração de malhas são apresentadas em extensa bibliografia,
não sendo possível ser exaustivo na explicação das respectivas particularidades.
Existem muitas publicações sobre geração de malhas estruturadas (Castillo, 1991;

4.5 Ferramentas de pré e pós-processamento
207
George et al., 1990; Mavriplis, 1996) e geração de malhas não estruturadas (Bern e
Eppstein, 1995; George, 1991; Mavriplis, 1995; Thompson e Weatherill, 1993;
Mavriplis, 1996). Existem também vários sites na WWW (Owen, 1995; Schneiders,
1995; Shewchuck, 1995; Young e MacPhedran, 1995) com informação actualizada
sobre geração de malhas.
4.5.2.4 Forma dos elementos
A forma dos elementos constituintes de uma malha condiciona fortemente o
desempenho dos métodos numéricos utilizados na resolução de um determinado
problema. Neste trabalho define-se relação de forma de um elemento como sendo a
razão entre a máxima e a mínima dimensões do elemento.
Geralmente, devem evitar-se elementos com valores elevados da relação de forma, pois
podem conduzir a matrizes mal condicionadas, piorando a velocidade e a fiabilidade das
aplicações numéricas em que são utilizados. Além disso, mesmo admitindo que o
método de resolução numérica utilizado permita obter soluções exactas, valores
elevados de relações de forma poderão conduzir a erros de interpolação.
4.5.2.5 Metodologia utilizada na geração de malhas
As malhas utilizadas na modelação (através do MEF) da hidrodinâmica de zonas
costeiras deverão seguir as seguintes regras principais: serem formadas por elementos
(triângulos ou quadriláteros) não distorcidos e os ângulos internos serem superiores a
um valor mínimo (20º é um valor limite aceitável).
Das várias técnicas de geração de malhas bidimensionais triangulares, a triangulação de
Delaunay é a mais conhecida. A triangulação de Delaunay, D, de um conjunto de
vértices, V, é um gráfico definido da seguinte forma: a duas dimensões, uma
triangulação de um conjunto de vértices V é um conjunto de triângulos T cujos vértices
coincidem com V, que não se intersectam entre si e cuja união preenche completamente
o domínio definido pela envolvente convexa do conjunto de vértices V. Diz-se que um

Capítulo 4
208
círculo é vazio se não contiver no seu interior qualquer vértice do conjunto V (no caso
dos vértices coincidirem com pontos da circunferência que limita o círculo a designação
de círculo vazio mantém-se). Considerando-se dois vértices, vu e vv, pertencentes a V, o
lado vuvv pertencerá à triangulação de Delaunay, se e só se existir um circulo vazio que
passe por vu e vv. A triangulação forçada de Delaunay de um domínio plano definido
pela sua fronteira (linha poligonal planar) é similar à triangulação de Delaunay, com a
condição adicional de que todos os segmentos da fronteira são forçados a pertencer,
como lados, à triangulação.
Existem muitos algoritmos para a realização de triangulações de Delaunay, cujo
desempenho tem sido avaliado em diversos trabalhos. Estas avaliações revelam uma
grande paridade em termos de desempenho entre três desses algoritmos: o incremental
insertion algorithm, o divide-and-conquer algorithm e o plane-sweep algorithm.
Shewchuck, 1995, desenvolveu o programa TRIANGLE que inclui aplicações dos
algoritmos anteriores e de um quarto algoritmo para refinamento de malhas triangulares
(Ruppert, 1995). Este algoritmo apresenta quatro etapas principais: numa primeira
etapa efectua a triangulação de Delaunay dos vértices da fronteira do domínio, na
segunda etapa procede à triangulação forçada de Delaunay, na terceira etapa procede à
eliminação dos triângulos pertencentes a ilhas e/ou concavidades do domínio, na quarta
fase efectua o refinamento da malha, através da inserção de vértices adicionais, até que
se verifiquem as restrições impostas para o ângulo interior mínimo e a área máxima de
cada um dos triângulos da malha.
Para além das questões geométricas (com implicações no rigor dos métodos numéricos),
no processo de geração de malhas de elementos finitos, o objectivo final do modelo
hidrodinâmico em que vão ser utilizadas deverá ser considerado de forma a que o
tratamento e análise dos resultados se possa efectuar de forma adequada. Assim, as
necessidades de resolução no domínio em análise deverão ser ponderadas tendo em
consideração a utilização final dos resultados a obter.
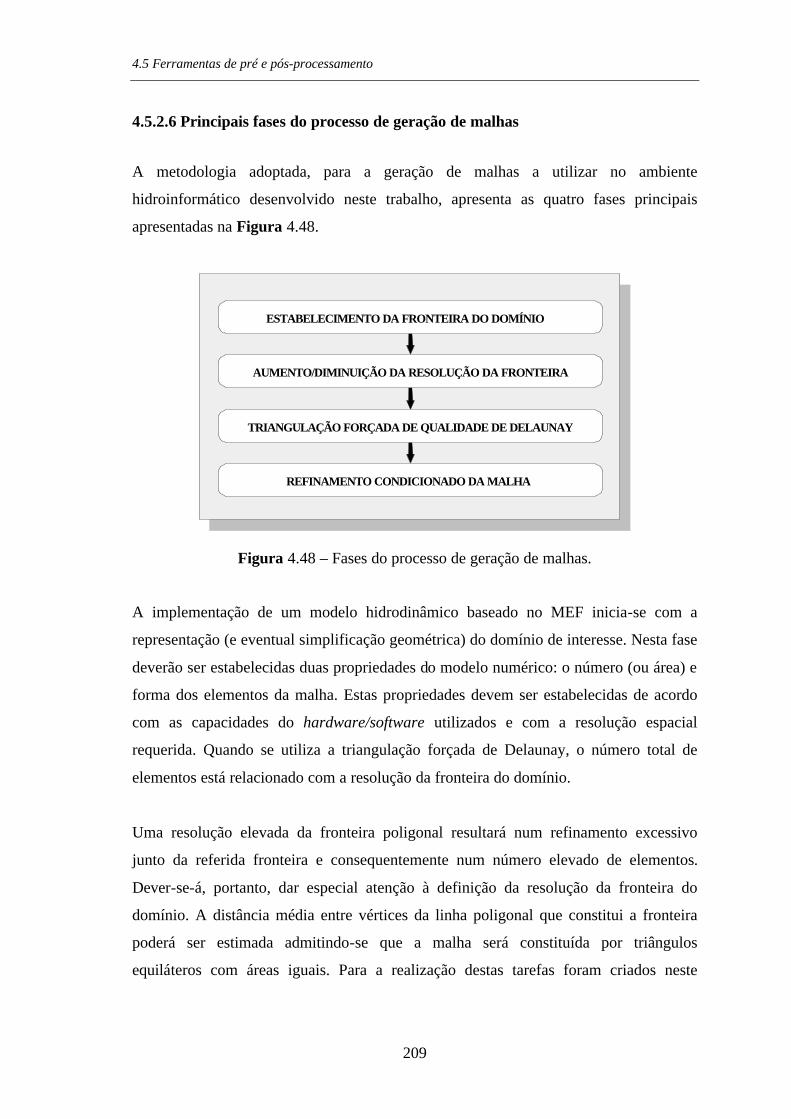
4.5 Ferramentas de pré e pós-processamento
209
4.5.2.6 Principais fases do processo de geração de malhas
A metodologia adoptada, para a geração de malhas a utilizar no ambiente
hidroinformático desenvolvido neste trabalho, apresenta as quatro fases principais
apresentadas na Figura 4.48.
ESTABELECIMENTO DA FRONTEIRA DO DOMÍNIO
AUMENTO/DIMINUIÇÃO DA RESOLUÇÃO DA FRONTEIRA
TRIANGULAÇÃO FORÇADA DE QUALIDADE DE DELAUNAY
REFINAMENTO CONDICIONADO DA MALHA
Figura 4.48 – Fases do processo de geração de malhas.
A implementação de um modelo hidrodinâmico baseado no MEF inicia-se com a
representação (e eventual simplificação geométrica) do domínio de interesse. Nesta fase
deverão ser estabelecidas duas propriedades do modelo numérico: o número (ou área) e
forma dos elementos da malha. Estas propriedades devem ser estabelecidas de acordo
com as capacidades do hardware/software utilizados e com a resolução espacial
requerida. Quando se utiliza a triangulação forçada de Delaunay, o número total de
elementos está relacionado com a resolução da fronteira do domínio.
Uma resolução elevada da fronteira poligonal resultará num refinamento excessivo
junto da referida fronteira e consequentemente num número elevado de elementos.
Dever-se-á, portanto, dar especial atenção à definição da resolução da fronteira do
domínio. A distância média entre vértices da linha poligonal que constitui a fronteira
poderá ser estimada admitindo-se que a malha será constituída por triângulos
equiláteros com áreas iguais. Para a realização destas tarefas foram criados neste
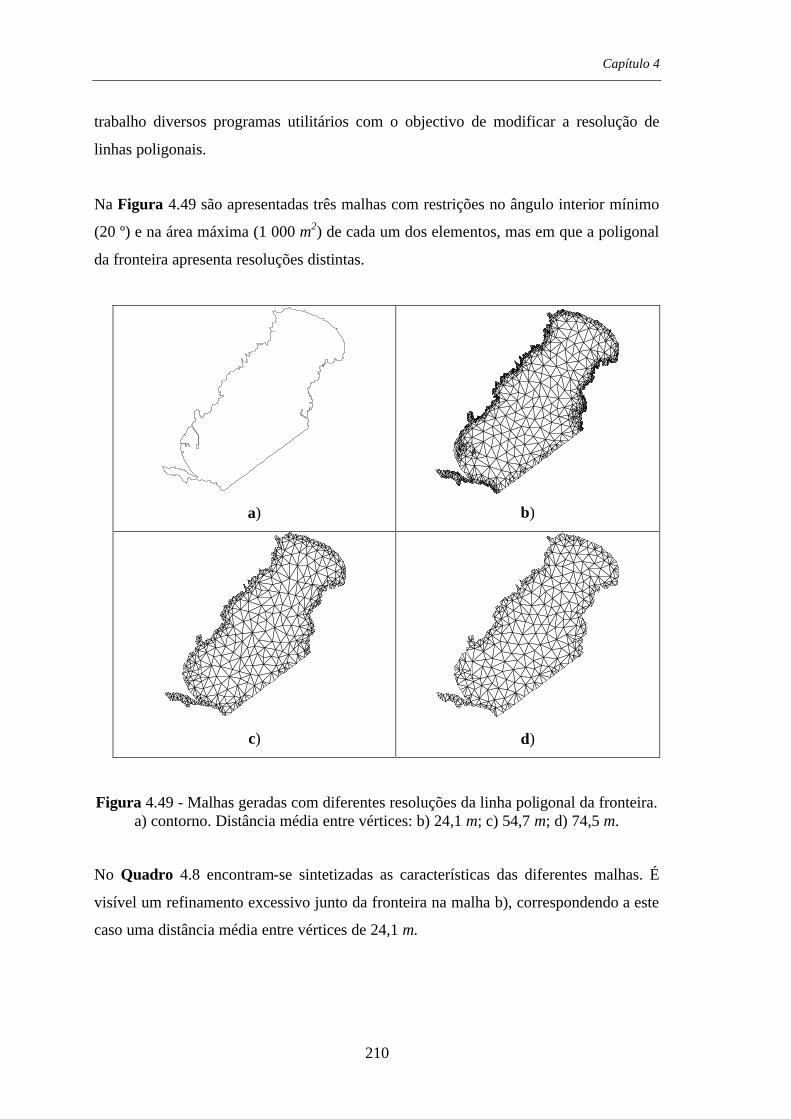
Capítulo 4
210
trabalho diversos programas utilitários com o objectivo de modificar a resolução de
linhas poligonais.
Na Figura 4.49 são apresentadas três malhas com restrições no ângulo interior mínimo
(20 º) e na área máxima (1 000 m2) de cada um dos elementos, mas em que a poligonal
da fronteira apresenta resoluções distintas.
a)
b)
c)
d)
Figura 4.49 - Malhas geradas com diferentes resoluções da linha poligonal da fronteira. a) contorno. Distância média entre vértices: b) 24,1 m; c) 54,7 m; d) 74,5 m.
No Quadro 4.8 encontram-se sintetizadas as características das diferentes malhas. É
visível um refinamento excessivo junto da fronteira na malha b), correspondendo a este
caso uma distância média entre vértices de 24,1 m.

4.5 Ferramentas de pré e pós-processamento
211
Quadro 4.8 – Características das malhas geradas com diferentes resoluções da poligonal de fronteira
Malha Distância média entre vértices [m] Nº total de elementos Nº total de pontos
b) 24,1 2635 1807
c) 54,7 996 709
d) 74,5 710 503
O procedimento geral apresentado anteriormente garante a geração de uma malha em
que quer o ângulo interior mínimo quer a área de cada um dos elementos sejam, no
primeiro caso, superiores ao valor imposto e, no segundo, inferior ao valor máximo
definido. No entanto, em muitas aplicações, a malha deverá ser gerada com variações
espaciais (refinamentos locais) do tamanho dos elementos de acordo com os gradientes
locais das variáveis a modelar.
O objectivo geral na quarta e última fase do processo de geração da malha é o de definir
uma função no domínio espacial que possa relacionar-se com o tamanho máximo dos
elementos. As técnicas de estimativa de erro (a priori ou posteriori) associadas aos
métodos numéricos utilizados tornam-se muito complexas, estando directamente
relacionadas com as técnicas específicas do MEF utilizado. Por isso, esta possibilidade
de estabelecimento da função espacial de definição do tamanho dos elementos no
domínio não foi utilizada. Em alternativa, estabeleceu-se uma metodologia simples,
envolvendo três passos:
1º passo: definição de uma função espacial de controlo do tamanho máximo
dos elementos baseada num critério geral (tal como profundidade da água,
gradientes da velocidade, gradientes de concentrações de poluentes, etc.) e
definição do novo número total de elementos;
2º passo: cálculo dos áreas máximas para cada um dos elementos da malha
inicial;
3º passo: refinamento da malha inicial utilizando as restrições de área
calculadas no 2º passo.
Na Figura 4.50 apresenta-se um exemplo ilustrativo da metodologia desenvolvida,
aplicada à geração de uma malha, para a modelação do transporte de uma substância,

Capítulo 4
212
num canal com escoamento permanente, proveniente de uma fonte pontual. Os
gradientes de concentração resultantes da distribuição da substância no canal são
utilizados para efectuar o refinamento da malha inicial.
Na Figura 4.51 apresentam-se malhas utilizáveis na modelação da hidrodinâmica e de
qualidade da água na Foz do Rio Cávado. O número total de elementos quintuplica
quando a restrição relativa ao ângulo interior mínimo de cada um dos triângulos passa
de 0º a 30º, como pode ser observado nas malhas a) a c) e no Quadro 4.9.
5.20
4.94
4.42
3.90
3.38
2.86
2.34
1.82
1.30
0.78
0.26
mg/L
a)
b)
c)
Figura 4.50 – Refinamento condicionado de uma malha – transporte de uma substância num canal com escoamento permanente: a) malha inicial; b) campo escalar
(concentração de substância); c) malha refinada de acordo com o gradiente de concentração da substância.
A malha d) da Figura 4.51 foi gerada impondo um ângulo interior mínimo de 30º e uma
área máxima de 2000 m2, resultando numa malha com 1572 elementos. Esta malha foi
utilizada no cálculo das correntes geradas pela acção da maré e do vento. De forma a
aumentar o rigor dos resultados obtidos, procedeu-se ainda à geração de uma malha
resultante do refinamento da malha d) condicionado por dois critérios distintos: no
primeiro considera-se a profundidade média, no segundo a função de controlo é definida
a partir da proximidade a um ponto fixo no interior do domínio, variando segundo uma
lei exponencial (Figura 4.52).

4.5 Ferramentas de pré e pós-processamento
213
Quadro 4.9 – Características das malhas – Consideração de diferentes restrições
Malha Distância média entre vértices [m] Nº total de elementos Nº total de pontos a) 79,2 144 147 b) 79,2 338 254 c) 79,2 738 469 d) 79,2 1572 915
a) b)
c) d)
Figura 4.51 – Malhas de elementos finitos utilizadas no estudo da Foz do Rio Cávado: a) ângulo interno mínimo: não considerado, área máxima: não considerada; b) ângulo
interno mínimo: 20º, área máxima: não considerada; c) ângulo interno mínimo: 30º, área máxima: não considerada; d) ângulo interno mínimo: 30º, área máxima: 2000 m2.

Capítulo 4
214
Figura 4.52 – Refinamento condicionado. Função de controlo do tamanho máximo dos elementos: a) batimetria; b) proximidade a um ponto fixo.
a)
b)