CAP ITULO 12 Projeto de controladores discretosaguinald/ensino/eel7063/servo12.pdf · resultados de...
22
CAP ´ ITULO 12 Projeto de controladores discretos 12.1 Introdu¸ c˜ ao O projeto de controladores discretos pode ser realizado por emula¸ c` ao, onde um controlador cont´ ınuo ´ e projetado, usando as mesmas t´ ecnicas vistas nos capitulos 6 e 7, e ent˜ ao discreti- zados, ou diretamente no plano Z . A primeira abordagem apresenta a vantagem de utlizar os resultados de projeto para controladores anal´ ogicos e dispensar a necessidade de um estudo mais detalhado de t´ ecnicas discretas. A desvantagem desta abordagem ´ e o fato de que o sustentador de ordem zero n˜ ao ´ e considerado no projeto e portanto, deve-se esperar uma degrada¸ c˜ ao do desem- penho. As t´ ecnicas baseadas no projeto do controlador usando diretamente o plano Z s˜ ao mais precisas, mas ao custo de uma maior complexidade. Na seq¨ uˆ encia apresentaremos as estruturas b´ asicas dos controladores discretos e ent˜ ao algumas t´ ecnicas de projeto. Duas abordagens para o projeto ser˜ ao consideradas: o projeto por emula¸ c˜ ao e o projeto diretamente do controlador discreto. 12.2 Estruturas de controladores As estruturas dos controladores discretos s˜ ao os equivalentes discretos das estruturas de con- troladores anal´ ogicos apresentados no Cap´ ıtulo 5. Assim, podemos ter controladores do tipo proporcional, proporcional-integral, proporcional-derivativo, proporcional-integral-derivativo e de avan¸ co e atraso de fase. A Tabela abaixo resume as estruturas dos controladores. Tanto a equa¸ c˜ ao diferen¸ ca quanto a fun¸ c˜ ao de transferˆ encia discreta de cada controlador s˜ ao apresentadas. Tipos de Controladores e(k) -→ C(z) u(k) -→
Transcript of CAP ITULO 12 Projeto de controladores discretosaguinald/ensino/eel7063/servo12.pdf · resultados de...

CAPITULO 12
Projeto de controladores discretos
12.1 Introducao
O projeto de controladores discretos pode ser realizado por emulacao, onde um controladorcontınuo e projetado, usando as mesmas tecnicas vistas nos capitulos 6 e 7, e entao discreti-zados, ou diretamente no plano Z. A primeira abordagem apresenta a vantagem de utlizar osresultados de projeto para controladores analogicos e dispensar a necessidade de um estudo maisdetalhado de tecnicas discretas. A desvantagem desta abordagem e o fato de que o sustentador deordem zero nao e considerado no projeto e portanto, deve-se esperar uma degradacao do desem-penho. As tecnicas baseadas no projeto do controlador usando diretamente o plano Z sao maisprecisas, mas ao custo de uma maior complexidade.
Na sequencia apresentaremos as estruturas basicas dos controladores discretos e entao algumastecnicas de projeto. Duas abordagens para o projeto serao consideradas: o projeto por emulacaoe o projeto diretamente do controlador discreto.
12.2 Estruturas de controladores
As estruturas dos controladores discretos sao os equivalentes discretos das estruturas de con-troladores analogicos apresentados no Capıtulo 5. Assim, podemos ter controladores do tipoproporcional, proporcional-integral, proporcional-derivativo, proporcional-integral-derivativo e deavanco e atraso de fase. A Tabela abaixo resume as estruturas dos controladores. Tanto a equacaodiferenca quanto a funcao de transferencia discreta de cada controlador sao apresentadas.
Tipos de Controladores
e(k)−→ C(z)u(k)−→

178 Capıtulo 12: Projeto de controladores discretos
Proporcional u(k) = Ke(k), C(z) = K
Derivativo u(k) = KP TD(e(k) − e(k − 1))
C(z) = KP TD(1 − z−1) = KPTD
z − 1
z
Integral u(k) = u(k − 1) +KP
TI
e(k)
C(z) =KP
TI
1
1 − z−1=
KP
TI
z
z − 1
Avanco/Atraso u(k + 1) = βu(k) + k(e(k − 1) − αe(k))
C(z) = K1 − αz−1
1 − βz−1
12.3 Controle Digital por Emulacao
Esta abordagem considera que o projeto de um controlador analogico ja tenha sido realizado.Este projeto segue exatamente o procedimento estudado em outros capıtulos e todo o processo deamostragem e reconstrucao do sinal nao e, portanto, considerado. O controlador analogico e entaodiscretizado usando-se algum metodo de discretizacao. Varios metodos de discretizacao podem serusados e aqui abordaremos o metodo de Euler, o metodo de Tustin, o metodo da transformacaocasada de polos-zeros e o metodo da transformacao casada de polos-zeros modificado.
12.3.1 Controle por emulacao via Euler
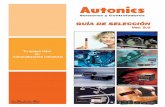
Esta tecnica consiste em fazer o projeto do controlador analogico, como vimos nos capıtulosprecedentes, e em seguida aproximar o sinal de controle obtido com C(s) atraves do metodo deEuler, usando
X ∼= X(kT + 1) − X(kT )
T(12.3.1)
T 2T ...
T/2
u(t)
u(t) com ZOHu(t)
u(t) medio com interpolaçao
kT
Figura 12.1: Aproximacao de Euler

EEL-DAS-UFSC 179
Exemplo 12.3.1Encontre a equacao recursiva correspondente a digitalizacao do controlador analogico C(s) =K0(s + a)
s + b.
Solucao: Seja e(t) o sinal de entrada do controlador e u(t) o sinal de saıda. Logo
U(s)
E(s)=
K0(s + a)
s + b: (s + b)U = K0(s + a)E
: u + bu = K0(e + ae)
Aplicando-se o metodo de Euler temos
u ∼= u(k + 1) − u(k)
Te e ∼= e(k + 1) − e(k)
T
Logo obteremos a seguinte aproximacao
u(k + 1) − u(k)
T+ b u(k) = K0(
e(k + 1) − e(k)
T+ a e(k))
que resulta na seguinte equacao recursiva
u(k + 1) = u(k) + T (−bu(k) + K0e(k + 1) − e(k)
T+ K0 a e(k))
= (1 − T b)u(k) + K0 e(k + 1) + (T K0 a − K0)e(k)
Note que u(k+1) e obtido em funcao de u(k), e(k+1) e e(k) de forma recursiva. A representacaodessa equacao recursiva em termos da funcao de transferencia discreta pode ser obtida com oauxilio da transformada Z:
Z[u(k + 1)] = z U(z) − zu(0)
Z[e(k + 1)] = zE(z) − ze(0)
Logo para condicoes iniciais nulas temos
zU(z) = (1 − T b)U(z) + K0 z E(z) + (T K0 a − K0)E(z)
E(z)−→ C(z)U(z)−→ C(z) =
K0 z + T K0 a − K0
z − 1 + T b=
U(z)
E(z)
e(t) u(kT)e(kT)
T
u(t)u(t)e(t)C(s) C(z) SOZ
Figura 12.2: Control Analogico Control Digital

180 Capıtulo 12: Projeto de controladores discretos
Area do trapezoide
e(t)
e(kT)
e(kT−T)
kT−T kT t
Figura 12.3: Integral Trapezoidal ( Area=e(kT − T ) + e(kT )
2.T )
12.3.2 Metodo de Tustin
A discretizacao obtida com o metodo de Euler pode ser interpretada como a substituicao datangente (derivada) pela secante ( variacao da funcao no intervalo de amostragem T ).
X ∼= X(kT + 1) − X(kT )
T
Outra forma de discretizacao consiste em aproximar a integral pela regra trapezoidal, comoilustrado na Figura 12.3. Desta figura
kT∫
0
e(t)dt =
kT−T∫
0
e(t)dt +
kT∫
kT−T
e(t)dt
Aproximando-sekT∫
kT−T
e(t)dt pela area do trapezio no intervalo T e definindo-se u(kT ) como a area
acumulada dos sucessivos trapezios ate o instante kT , temos a seguinte relacao recursiva
u(kT ) = u(kT − T ) +e(kT − T ) + e(kT )
2T (12.3.2)
Podemos representar a integracao pelo bloco
E(s)−→ 1
s
U(s)−→ U(s)
E(s)=
1
s
onde e(t) e o sinal cuja area queremos calcular e u(t) e a area desejada.Tomando-se a transformada Z da equacao recursiva temos
U(z) = z−1U(z) +z−1E(z) + E(z)
2T
E(z)−→ F(z)U(z)−→ U(s)
E(s)= F (z) =
T
2
1 + z−1
1 − z−1=
1
2
T
1 − z−1
1 + z−1

EEL-DAS-UFSC 181
Para o sistema abaixo terıamos a relacao
e(t)−→ a
s + a
u(t)−→ e(k)−→ a2T
1−z−1
1+z−1 + a
u(k)−→
C(s) C(z)Nota-se entao, dos dois exemplos acima que a relacao entre C(s) e C(z) com a aproximacao
bilinear e dada por C(s) = C(z) com
s =2
T
1 − z−1
1 + z−1(Tustin)
que expressa uma transformacao bilinear de s para z.
Exemplo 12.3.2Obtenha um controle digital para que o sistema abaixo tenha em malha fechada uma frequencianatural ωn = 0, 3 rad/seg e um amortecimento ξ = 0, 7
- -
6-
+r eC(s)
1
s2u y
Figura 12.4: Sistema dp exemplo
Solucao: Primeiro determinaremos um controlador analogico C(s) que atende as especi-ficacoes. Em seguida escolhemos um metodo de emulacao para implementar digitalmente o sinalde controle.
e(t) u(kT)e(kT)
T
u(t)u(t)e(t)C(s) C(z) SOZ
Figura 12.5: Implementacao Analogica Implementacao Digital
Com os metodos de projeto de controladores de avanco encontramos
C(s) = Kc
s + a
s + ba = 0, 2, b = 2, e Kc = 0, 81
−2 −0,2
−0,2
0,2
Im(s)kc=0,81
Re(s)
Polos: s = 0, 2 ± j0, 2Equacao caracterıstica: s2 +2ξωns + ω2
n = 0:ξ = 0, 7 ωn = 0, 2
√2
= 0, 282

182 Capıtulo 12: Projeto de controladores discretos
Para a implementacao digital precisamos da frequencia de amostragem. Em sistemas de con-trole a frequencia de amostragem e geralmente escolhida em torno de 20 vezes a frequencia debanda passante do sistema de malha fechada, que corresponde aproximadamente a ωn. Para oexemplo, adotaremos este fator de 20 vezes. Logo a frequencia de amostragem e ωa = (0, 3).20 = 6rad/seg ∼= 1Hz, e o perıodo de amostragem e T = 1seg. Com a aproximacao bilinear temos
U(z)
E(z)= C(z) = Kc
s + a
s + b
∣
∣
∣
∣
s=2
T
1 − z−1
1 + z−1
= Kc
21 − z−1
1 + z−1+ a
21 − z−1
1 + z−1+ b
= Kc
2 − 2z−1 + a(1 + z−1)
2 − 2z−1 + b(1 + z−1)
= Kc
2 + a + (a − 2)z−1
2 + b + (b − 2)z−1
Portanto
U(z)[2 + b + (b − 2)z−1] = kc[(2 + a) + (a − 2)z−1]E(z)
que por sua vez conduz a seguinte equacao recursiva
u(k) =2 − b
2 + bu(k − 1) +
2 + a
2 + be(k) + Kc
a − 2
2 + be(k − 1)
Note que e(k) = r(k) − y(k) e portanto podemos implementar o controlador C(s) atraves doesquema digital apresentado na Figura 12.6.
r(k)
y(k)u(k) u(t) y(t)1
s2e(k)=r(k)−y(k)
A/DT
y(k)
Eq. RecursivaSOZ
Figura 12.6: Sistema Discreto
Poderıamos ter resolvido o mesmo problema usando um outro metodo de discretizacao.
Exemplo 12.3.3Refazer o exemplo usando Euler.

EEL-DAS-UFSC 183
y(t)
t
1,4
1,2
1,0
Figura 12.7: Resposta ao Degrau
12.3.3 Metodo da transformacao casada de polos-zeros
Neste caso usa-se a relacao z = esT para mapear polos e zeros do controlador contınuo no planocomplexo.
No caso de funcoes de transferencia com maior numero de polos que zeros, adicionam-se zerosem z = −1, de modo a igualar o numero de zeros e polos do controlador discreto. Seja uma funcaode transferencia C(s) com um numero de polos maior do que de zeros. Usando-se o mapeamentoz = eTs, obtem-se C(z). Quando a frequencia ω varia de jω = 0 para jωa/2, que e a maximafrequencia possıvel no plano Z, tem-se z variando de z = e0 = 1 a z = e
ωa2
T = ejπ = −1. ComoC(s) tem zeros no infinito, que correspondem a ω → ∞, segue que C(s) tende para zero quandoω cresce. Para que o mesmo ocorra com H(z), deve-se ter zeros em z = −1.
Exemplo 12.3.4Seja um controlador analogico dado por
C(s) = 10s + 1
s + 2
e seja T = 0.1 seg o perıodo de amostragem.Usando-se o mapeamento z = esT , o zero em −1 e o polo em −2 sao mapeados em e−1×0.1 =
0.905 e e−2×0.1 = 0.819, respectivamente.A funcao de transferencia amostrada e entao
C(z) = Kd
z + 0.905
z + 0.819
onde Kd e o valor do ganho a ser determinado. Para que os ganhos em baixa frequencia sejamiguais, deve-se ter C(s = 0) = C(z = 1) e portanto
Kd
1 − 0.905
1 − 0.819=
10
2
e segue que Kd = 14.05.A funcao de transferencia amostrada e portanto
C(z) = 14.05z − 0.905
z − 0.819
No exemplo anterior a funcao de transferencia do controlador contınuo tinha o mesmo numerode polos e zeros. No exemplo seguinte o controlador contınuo apresenta dois polos e um zero.

184 Capıtulo 12: Projeto de controladores discretos
Exemplo 12.3.5Seja a funcao de transferencia
C(s) = 10s + 1
s(s + 2)
Neste caso tem-se dois polos e um zero e deve-se entao acrescentar um zero em z = −1. Afuncao de transferencia discreta e entao
C(z) = Kd
Calculando-se o ganho da funcao de transferencia discreta da mesma forma como anterior-mente, tem-se Kd = 7.025 e a funcao de transferencia discreta e
C(z) = 7.025(z + 1)(z − 0.905)
s(z − 0.819)
Metodo de transformacao casada de polos-zeros modificada
Quando a funcao de transformacao discreta tem o mesmo numero de polos e zeros, a equacaodiferenca correspondente e tal que a saıda em um instante de amostragem depende da entrada nomesmo instante. Seja, por exemplo, um controlador dado por
Y (z)
U(z)= K
z + a
z + b
A equacao diferenca correspondente e dada por
y(k) = −by(k − 1) + Ku(k) + au(k − 1)
e a saıda y(k) depende de u(k). Se o tempo de calculo for tal que a entrada atual nao possaser usada para gerar a saıda atual, deve-se manter o numero de polos maior do que o de zeros,modificando-se o metodo da transformacao casada, o qual consiste em introduzir zeros em −1,de tal modo que se tenha pelo menos um polo a mais do que um zero. No caso da funcao detransferencia
C(s) = 10s + 1
s(s + 2)
por exemplo, nao seria acrescentado nenhum zero em z = −1.
12.4 Projeto por metodos discretos
Nos metodos de emulacao as operacoes de derivada e/ou integral executadas pelo controlador saoaproximadas por operacoes algebricas com as amostras dos sinais de entrada/saıda do controladoranalogico projetado a partir do modelo analogico da planta. Nesta secao veremos como projetarum controlador discreto a partir do modelo discreto da planta. Este modelo inclui o sustentadorde ordem zero, e antes da aplicacao do metodo de projeto, deve-se obter a funcao de transferenciada planta.
A Figura 12.8 mostra o modelo discreto e a Figura 12.9 mostra o modelo discreto equivalente.

EEL-DAS-UFSC 185
e(kT)r(t)
+
r(kT) u(t) y(t)
−T
Ty(kT)
G(s)
Modelo AnalogicoControle Digital
C(z) D/A SOZ
Figura 12.8: Modelo Discreto
-
6
-
-
+r(kT)G(z)
e(kT) u(kT) y(kT)C(z)
Figura 12.9: Modelo Discreto Equivalente
F(s) f(t) f(kT) F(s) F(z)*
Tabelas ou teoremas dos residuos
f(kT)t=kT
AmostradorIdeal *
sinalamostrado(continuo)
f(kT)=f(t) δ(t)*
z=e TsL−1
Trem de impulsos de periodo T
Z[f(kT)]Sinal Discreto
L [F(s)]
A funcao de transferencia do controlador e C(z) e a funcao de transferencia da planta e dosustentador de ordem zero e calculada por
G(z) = (1 − z−1)Z[
G(s)
s
]
Pode-se usar o teorema dos resıduos, para obter esta funcao, como ilustrado na Tabela 12.4,
usando-se as seguintes formulas: F (z) =n∑
i=1
R(Pi), Pi polos distintos de F (s).
♦ R(Pi) =
[
(s − Pi)F (s)z
z − esT
]
s=Pi
(Multiplicidade 1)
♦ R(Pi) =1
(m1)!
dm−1
dsm−1
[
(s − Pi)mF (s)
z
z − esT
]
s=Pi
(Multiplicidade m).
Dois metodos de projeto serao estudados nesta secao, o projeto por lugar das raızes e o pro-jeto no domınio da frequencia. Os dois metodos seguem basicamente os mesmos princıpios jaapresentados para o caso contınuo.

186 Capıtulo 12: Projeto de controladores discretos
12.4.1 Projeto pelo lugar das raızes
O metodo de projeto pelo lugar das raızes segue os mesmos princıpios usados no caso contınuo. Oprojeto visa melhorar o desempenho em regime permanente ou o desempenho em regime transitorioou ambos.
Projeto por avanco de fase
Para melhorar o desempenho em regime transitorio usa-se um compensador de avanco de fase,dado por
C(z) =z + α
z + β
As etapas principais do projeto sao:
1. A posicao dos polos dominantes no plano s e determinada a partir dos requisitos de de-sempenho transitorio. Estes polos sao entao mapeados no plano Z, usando o mapeamentoz = esT .
2. O zero do controlador e fixado, e o polo e calculado pela condicao de pertinencia angular.
3. O ganho do controlador e calculado pela condicao de pertinencia de modulo.
4. As constantes de erro sao calculadas e em caso em que a condicao de erro for insatisfatoria,o projeto e refeito ou um compensador de atraso de fase e acrescentado.
Projeto por atraso de fase
No caso em que o erro em regime permanente for muito elevado, deve-se acrescentar um compen-sador de atraso de fase, dado por
C(z) =z + α
z + β
As etapas principais do projeto sao:
1. Determinam-se a constante de erro desejada Kdesejadoerro , a partir do erro especificado, e a cons-
tante atual de erro Kerro, onde Kerro pode ser o ganho estatico, de velocidade ou aceleracao.
2. O polo do compensador e fixado. Usualmente fixa-se este polo proximo de z = 1, quecorresponde a s = 0 no plano s.
3. Determina-se o zero do compensador fazendo-se
Kdesejadoerro
Kerro
=1 − α
1 − β
Do mesmo modo que no caso contınuo, o aumento de ganho e dado pelo ganho do controladornas baixas frequencias (s → 0 no caso contınuo e z → 1 para o caso discreto).
A seguir apresentaremos alguns exemplos do projeto pelo lugar das raızes.

EEL-DAS-UFSC 187
r(t)
y(kT)
+
r(kT) u(t)
y(t)
−T
T
e(k) u(k) y(t)1
s2C(z) SOZ
Figura 12.10: Figura para o exemplo
- -
6-
+r(kT)G(z)
e(kT) u(kT) y(kT)C(z)
Figura 12.11: Diagrama equivalente
Exemplo 12.4.1Projete um controlador para que o sistema da Figura 12.10 em malha fechada apresente um com-portamento similar a um sistema analogico com ωn
∼= 0, 3rad/seg. e ξ ∼= 0, 7.
Solucao: O diagrama discreto equivalente e apresentado na Figura 12.11 onde G(z) = (1 −z−1)Z
[
G(s)
s
]
=T 2
2
z + 1
(z − 1)2.
Escolhendo-se a frequencia de amostragem como sendo 20 vezes a frequencia da banda passantedo sistema de malha fechada temos ωs = (20)(0, 3) = 6rad/seg∼= 1Hz. Logo T = 1seg.Assim temos
G(z) =z + 1
2(z − 1)2
O lugar das raızes obtido com o controlador proporcional e mostrado na Figura 12.12.
−1 1Re(z)
Im(z)
Figura 12.12: Lugar das raızes com controlador proporcional
Note que um controlador proporcional nao consegue estabilizar o sistema. Com um controlador

188 Capıtulo 12: Projeto de controladores discretos
PD podemos diminuir as oscilacoes. A funcao de transferencia de um controlador PD e
D(z) = Kp + Kp TD(1 − z−1) = Kz − α
z
onde α =TD
1 + TD
e K = KP (1 + TD).
No plano s os polos desejados sao dados por
s2 + 2ξωns + ω2n = 0 : s2 + 2.0, 7.0, 3 + (0, 3)2 = 0
: sd = −0, 21 ± 0, 21j
No plano z os polos desejados sao dados por z = esT com s sendo os polos no plano s o queresulta em:
zd = e−0,21±0,21j = e−0,21(cos 1±sen 1j)
= 0, 79 ± 0, 17j
Com as condicoes de modulo e fase do lugar das raızes temos ∠C(z0d) + ∠G(zd) = ±π =
:0, 17
0, 79 − α= −3, 03:α = 0, 85
1 = |C(zd)||G(zd)| =:K =1
2, 77= 0, 36.
Com isso temos
C(z) = 0, 36z − 0, 85
z= 0, 36(1 − 0, 85z−1)
que resulta em la lei de controle
u(k) = 0, 36e(k) − 0, 348e(k − 1)
que e similar a encontrada num exemplo anterior de projeto via emulacao.
Normalmente nao e necessario que os polos desejados de malha fechada sejam exatamenteaqueles especificados, mas sim estejam dentro de uma regiao do plano z associada a um fator deamortecimento maior que o especificado (menor oscilacoes).
r(t) u(t)
T
y(t)1
s(s+2)
+
−C(z) SOZ
Figura 12.13: Sistema do Exemplo 12.4.2

EEL-DAS-UFSC 189
Exemplo 12.4.2 (Ogata, Discrete-time Control Systems, p. 384)Para o sistema mostrado na Figura 12.13 projetar um controlador discreto para atender aos se-guintes requisitos de projeto: amortecimentoe ξ = 0, 5 e tempo de resposta tr2%
= 2 seg. O perıodode amostragem e T = 0, 2 seg. Pede-se ainda o calculo da resposta ao degrau e o erro a rampa.
Solucao: tr2%=
4
ξωn
= 2 =:ωn = 4
Os polos desejados sao sd = 2 ± 3, 464j. Tipicamente o perıodo de amostragem e escolhido de talforma que existam pelo menos 9 amostras por ciclo de oscilacao amortecida. Conferindo no casoacima temos,
Freq. amostragem ωs =2π
T= 31, 42
Freq. oscilacoes amortecidas ωd = 3, 464.Portanto a escolha do perıodo de amostragem e satisfatoria.
Os polos dominantes no plano z sao zd = eTsd = 0, 5158 ± 0, 4281j = 0, 67∠39, 69.O modelo discreto do sistema acima e
G(z) = Z[SOZG(s)] = Z[
1 − e−Ts
sG(s)
]
= (1 − z−1)Z[
G(s)
s
]
= (1 − z−1)Z[
1
s2(s + 2)
]
=0, 01758(z + 0, 876)
(z − 1)(z − 0, 6703)
Como o ponto zd deve pertencer ao lugar das raızes, temos
−1
K= G(zd)C(zd): ± 180◦ = ∠G(zd) + ∠C(zd)
entao ∠C(zd) = 51, 26◦.Um controlador que atende a condicao de fase acima e um avanco de fase.
C(z) = Kz − α
z − β
Cancelando o polo em 0, 6703 com a escolha α = 0, 6703 temos
∠zd − α − ∠zd − β = 51, 26◦:β = 0, 2543.
O ganho K e determinado com a condicao de modulo
|G(zd)C(zd)| = 1 =:K = 12, 67
Em malha fechada temos entao
Y (z)
R(z)=
G(z)C(z)
1 + G(z)C(Z)=
0, 2227z + 0, 1951
z2 − 1, 0316z + 0, 4494= F (z)
e a resposta ao degrau unitario
R(z) =1
1 − z−1e Y (z) = F (z)
1
1 − z−1

190 Capıtulo 12: Projeto de controladores discretos
A sequencia y(kT ) pode ser obtida pela inversa da transformada Z, tabelas ou mesmo porsimulacao.
O erro de velocidade e dado por
erp = limz→1
(1 − z−11)E(z) =1
Kv
onde
Kv = limz→1
1 − z−1
TG(z)C(z) = 2, 801.
Como no caso de sistemas analogicos podemos aumentar o ganho Kv, e portanto diminuir o errode regime, introduzindo um compensador de atraso em cascata como o controlador ja projetado.Por exemplo, com
Ca(z) =z − αa
z − βa
e αa = 0, 94, βa = 0, 98 temos o novo ganho de velocidade Kv dado por
Kv = limz→1
1 − z−1
TG(z)C(z)Ca(z) = (3).(2, 801) (Ca(1) = 3)
que representa um aumento de 3 vezes no ganho Kv sem o controlador de atraso. A escolha dozero do controlador de atraso ( αa) e tipicamente proximo da unidade e deve satisfazer
1 > αa ≥ 1 − 0, 1|zd| (proximo de 1)
e o valor de βa e escolhido tal que
Ca(1) =1 − αa
1 − βa
= acrescimo desejado
controlador final; Ca(z)C(z) = kz − α
z − β
z − αa
z − βa
.
12.4.2 Projeto no domınio da frequencia
Resposta de um sistema discreto a uma entrada senoidal
Vamos considerar um sistema linear, discreto, invariante no tempo, com funcao de transferenciaG(z). O sistema e por hipotese, estavel, ou seja, todos os polos de G(z) estao no interior do cırculounitario. A entrada do sistema e um sinal senoidal u(t) = sen ωt, amostrado por um amostradorideal, resultando em u(k) = sen kωT .
Entao
U(z) = Z [sen kωT ] =zsen ωT
(z − ejωT )(z − e−jωT )
A resposta do sistema e
Y (z) = G(z)U(z) = G(z)zsen ωT
(z − ejωT )(z − e−jωT )
Fazendo-se a expansao em fracoes parciais, obtem-se
Y (z) =Az
z − ejωT+
Az
z − e−jωT+ termos devidos aos polos de G(z)

EEL-DAS-UFSC 191
onde A indica o conjugado de A.Calculando-se A, usando o procedimento de multiplicar Y (z) por z−ejωT
ze fazer z → ejωT ,
obtem-se
A =G(ejωT
2j
Portanto
A = −G(e−jωT
2j
DenotandoG(ejωT ) = Mejθ segue que G(e−jθ) = Me−jθ
A resposta do sistema e entao dada por
Y (z) =M
2j
(
ejθz
z − ejωT− e−jθz
z − e−jωT
)
+ termos devidos aos outros polos de G(z)
No regime permanente, a contribuicao dos polos do sistema para a resposta desaparece, poispor hipotese o sistema e estavel. O dois primeiros termos da expansao se combinam para fornecera resposta em regime permanente no domınio do tempo
yrp = M sen(kωT + θ)
onde M =∣
∣G(ejωT )∣
∣ e θ = ∠G(ejωT ).
Esta resposta e tambem senoidal, com a amplitude multiplicada por∣
∣G(ejωT )∣
∣ e com umdeslocamento de fase dado por θ = ∠G(ejωT ), e portanto, e analoga ao caso contınuo.
Vimos no caso contınuo que a resposta em frequencia nos permite obter informacoes sobreo comportamento do sistema, uteis tanto para a analise quanto para a sıntese de controladoresatraves de metodos frequenciais. No caso discreto pode-se usar o mapeamento z = esT , coms = jω, o que permitiria tracar a resposta em frequencia (diagrama de Bode, etc). No entantotem-se uma dificuldade. No caso discreto, as frequencias estao idealmente limitadas a ωa
2, onde ωa
e a frequencia de amostragem, para que o ¨aliasing¨ seja evitado. Assim, teriamos um diagramade Bode limitado em frequencia, e a analogia com o caso contınuo seria difıcil.
Para se manter as vantagens de trabalhar no domınio da frequencia para o caso discreto. tem-seque usar a transformacao bilinear. Esta transformacao bilinear e dada por
z =1 + T
2w
1 − T2w
onde T e o perıodo de amostragem. Desta equacao obtem-se a transformacao inversa
w =2
T
z − 1
z + 1
Uma funcao de transferencia pode entao se escrita como uma funcao racional de z e os metodosde resposta em frequencia usados.
Com esta transformacao, a faixa primaria e mapeada no cırculo unitario no plano z e por suavez este e mapeado no lado esquerdo do plano w.
No plano w pode-se definir uma frequencia fictıcia η, ou seja w = jη. Esta frequencia pode serrelacionada com a frequencia ω do plano s, usando-se os mapeamentos w = 2
Tz−1z+1
e z = esT .
w = jη =2
T
z − 1
z + 1
∣
∣
∣
∣
z=ejωT
=2
T
ej ωT2 − e−j ωT
2
ej ωT2 + e−j ωT
2
=2
Tj tg
ωT
2

192 Capıtulo 12: Projeto de controladores discretos
ou
η =2
Ttg
ωT
2
Desde que ωa = 2πT
tem-se que
η =2
Ttg
ω
ωa
π
Desta ultima equacao e facil de ver que quando ω varia de −ωa
2a 0 entao η varia de −∞ a 0,
e quando ω varia de 0 a ωa
2, entao η varia de 0 a ∞. Observa-se entao, que com a transformacao
bilinear tem-se uma frequencia fictıcia que varia ate ∞, o que retira a restricao para a construcaodo diagrama de Bode de forma analoga ao caso contınuo.
A ultima equacao pode ser escrita como
T
2= tg
ω
ωa
π
Para valores pequenos de frequencia, pode-se substituir a tangente pelo arco:
η ≈ ω
e portanto a frequencia no plano s e a frequencia fictıcia η sao aproximadamente iguais.
Diagrama de Bode
O procedimento para o tracado do diagrama de Bode para G(jη) segue o procedimento para G(jω).Existem no entanto algumas diferencas com relacao ao valor da magnitude em altas frequencias.Para uma funcao da transferencia no plano s com maior numero de polos que zeros, a assıntotapara altas frequencias tende para −∞, pois lims→∞ = 0. No entanto, quando a frequencia fictıciaη → ∞, no plano w, a frequencia no plano s tende para ωa
2. No entanto, limη→∞ |G(jη)| geralmente
e diferente de limω→ωa2|G(jω)|, e o comportamento nas altas frequencias e diferente nos dois casos.
Procedimento de projeto
O procedimento de projeto consiste nos seguintes passos:
1. Obter G(z) e entao G(w) usando a transformacao bilinear
z =1 + T
2w
1 − T2w
O perıodo de amostragem deve ser escolhido adequadamente.
2. Faz-se w = jη em G(w) e traca-se o diagrama de Bode de G(jη).
3. Usa-se o diagrama de Bode para fazer o projeto seguindo o mesmo procedimento usado parafazer o projeto no domınio da frequencia para o caso contınuo.
4. Uma vez obtida a funcao de transferencia C(w) do controlador no plano w, transforma-seesta funcao em C(z), usando-se a transformacao bilinear
w =2
T
z − 1
z + 1
ou seja,C(z) = C(w)|
w= 2T
z−1z+1

EEL-DAS-UFSC 193
Exemplo 12.4.3Para o sistema representado na Figura 12.14, projete um controlador, no domınio da frequencia,que assegure os seguintes objetivos:
• margem de fase de 60◦;
• margem de ganho de pelo menos 10db;
• constante de erro de velocidade kv = 2 seg−1;
• perıodo de amostragem T = 0, 2seg.
O perıodo de amostragem e T = 0, 2 seg.
Σ C∗1 − e−Ts
s
K
s(s + 1)
R(s) Y (s)+
−
Figura 12.14: Sistema para o Exemplo 12.4.3
O modelo discreto equivalente e:
G(z) = Z[
1 − e−Ts
s
k
s(s + 1)
]
= 0, 01873K(z + 0, 9356)
(z − 1)(z − 0, 8187)
com a transformacao bilinear
z =1 +
T
2ω
1 − T
2ω
⇐ :ω =2
T
z − 1
z + 1
temos
G(w) = G(z)
∣
∣
∣
∣
z=1 + 0, 1w
1 − 0, 1w
=
K
(
w
300, 6+ 1
)(
1 − w
10
)
w
(
w
0, 997+ 1
)
O controlador C(z) = C(w)
∣
∣
∣
∣
w=2
T
z − 1
z + 1
deve ser determinado para se atingir os requisitos de
projeto.Como G(w) ja possui um ganho a ser determinado, vamos assumir o controlador C(w) com
ganho unitario)
D(w) =1 + w/α
1 + w/β(controlador de avanco)
O ganho K e determinado para se atingir o requisito Kv = 2 de onde tiramos
Kv = limw→0
wC(w)G(w) = 2:K = 2.

194 Capıtulo 12: Projeto de controladores discretos
Usando as tecnicas de projeto para controlador de avanco no domınio da frequencia encontra-mos
C(w) =1 + w/0, 997
1 + w/3, 27
MF = ...0◦
MG = 14 db
Assim encontramos
C(z) = C(w)
∣
∣
∣
∣
w=10z − 1
z + 1
= 2, 718z − 0, 8187
z − 0, 5071
Em malha fechada ficamos com
Y (z)
R(z)=
C(z)G(z)
1 + C(z)G(z)=
0, 1018(z + 0, 9356)
(z − P1)(z − P2)
onde os polos sao dados por P1, P2 = 0, 7026 ± 0, 3296j.
12.5 Questoes de Implementacao
Esta secao discute alguns aspectos da implementacao do controle digital.
Escolha do perıodo de amostragem
Segundo o teorema da amostragem, a frequencia de amostragem deve ser pelo menos 2 vezes amaior frequencia do sinal amostrado. Pode-se entao escolher ωa = 2ωm, onde ωm indica a maiorfrequencia do sinal. No entanto, nas aplicacoes, uma taxa de amostragem bem superior e usada,para atender requisitos de estabilidade em malha fechada ou outros requisitos de projeto, comoseguimento da entrada com baixo erro. Assim usa-se ωa em torno de 8 a 10 vezes ωm. A escolhado perıodo de amostragem e um compromisso entre requisitos de desempenho do sistema emmalha fechada, que exigem uma alta taxa de amostragem, e o custo envolvido, ja que maiorestaxas de amostragem exigem computadores mais rapidos. Em situacoes praticas, a frequencia deamostragem e selecionada com base na faixa de passagem requerida da resposta e frequencia emmalha fechada ou do tempo de resposta ou tempo de subida da resposta transitoria. Uma regrapratica e amostrar de 8 a 10 vezes durante um ciclo de oscilacao, se o sistema e superamortecido.A frequencia de amostragem pode ainda ser escolhida como 8 a 10 vezes a faixa de passagemem malha fechada da resposta em frequencia (algumas vezes 5 e aceitavel, outras vezes 20 enecessario).

EEL-DAS-UFSC 195
Exercıcios
1. Considere o sistema de controle digital da Figura 4, onde a planta e de primeira ordem etem um tempo morto de 2 seg. O perıodo de amostragem e T = 1 seg. Projete um controladorPI digital, tal que os polos dominantes de malha fechada tenham um amortecimento ζ = 0.5 eo numero de amostras por ciclo de oscilacao senoidal amortecida seja 10. Determine o erro auma entrada tipo rampa unitaria. Obtenha a resposta do sistema a uma entrada do tipo degrauunitario.
Y (z)R(z)
−
+
δT
*
6
-- --- e−2s
s + 1
1 − e−Ts
sD(z)
Figura 12.15: Exercıcio 1
2. Seja o sistema da Figura 5. Projete um controlador digital tal que os polos dominantes dosistema tenham um amortecimento ζ = 0.5 e o numero de amostras por ciclo de oscilacao senoidalamortecida seja 8. O perıodo de amostragem e T = 0.2 seg. Obtenha a resposta a uma entradado tipo degrau unitario. Determine a constante de velocidade Kv.
−
+
Digital
Contr.
δT
R(z) Y (z)-
6
* - -- -1
s(s + 1)ZOH
Figura 12.16: Exercıcio 2
3. Considere o diagrama de blocos de um sistema de controle de uma antena, mostrado naFigura 6. O perıodo e T = 0.05 seg. a. Determine a margem de fase com K = 1 e D(z) = 1.b. Para reduzir o erro em regime permanente, K e aumentado para 5. Projete um controlador deatraso de fase de tal modo que a margem de fase do sistema seja 45o.c. Projete um controlador de avanco de fase, com K = 5, para que a margem de fase do sistemaseja 45o.d. Use o Scilab para para determinar a resposta no tempo do sistema nos itens b. e c. Compareos tempos de subida e a ultrapassagem para os dois sistemas.
e engrenagensMotoramplificador
digital
Controlador
Y (z)R(z)-
6
----- 20
s2 + 6sKZOHD(z)
Figura 12.17: Exercıcio 3

196 Capıtulo 12: Projeto de controladores discretos
4. A funcao de transferencia seguinte e um compensador de avanco projetado para fornecercerca de 60O de avanco em ω1 = 3 rad/s
C(s) =s + 1
0.1s + 1
Supondo que o perıodo de amostragem seja T = 0.25 seg, calcule e plote no plano z aslocalizacoes do polo e zero da implementacao digital de C(s) obtida:a. usando o metodo de Tustinb. metodo de EulerPara cada caso, calcule o avanco de fase fornecido pelo compensador em z1 = ejω1T .
5. A funcao de transferencia de uma planta e G(s) =1
(s + 0.1)(s + 3)que deve ser contro-
lada por um controlador digital, com perıodo de amostragem T = 0.1 seg, como mostrado naFigura 12.18.a. Projete um compensador digital, no plano z, usando o lugar das raızes para que a respostaa um degrau unitario apresente um tempo de subida de 1 seg e um sobressinal de 5%. Sugestao:use o zero do controlador para cancelar o polo da planta mais proximo da origem.b. Determine o tipo do sistema e o erro correspondente.c. Projete um controlador discreto de atraso de fase, que reduza o erro em regime permanentepela metade.
Dado: Z[
1
s(s + 0.1)(s + 3)
]
=z(0.00452z + 0.004076
(z − 1)(z2 − 1.731z + 0.7334)
Y (s)R(s)
−
+
6
- - --- G(s)ZOHD(z)
Figura 12.18: Exercıcio 5
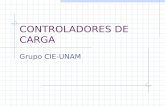
6. O sistema de controle de posicionamento de uma antena e mostrado na Figura 12.19 abaixo.O controle deve ser digital com um tempo de amostragem T = 0.1 seg.a. Projete um controlador, usando o lugar das raızes, que asssegure um fator de amortecimentoζ = 0.5. Determine o tempo de resposta a 5%. O lugar das raızes do sistema nao compensado, no plano z, assim como o lugar geometrico dos polos no plano z com amortecimento constanteigual a 0.5 sao dados na Figura 12.20.b. Supondo agora que o tempo de resposta a 5% deve ser 2 seg e deseja-se manter o mesmoamortecimento do item anterior, projete um controlador para atingir este objetivo. Sugestao: Useo zero do controlador para cancelar o polo em 0.843
Dados: Z[
1
s2(s + 1.71)
]
=0.00473 z (z + 0.945)
(z − 1)2(z − 0.843)e tr5%
≈ 3
ζωn
7. Para o sistema cujo diagram de Bode no plano w e dado na Figura 12.21:a. Projete um controlador de atraso de fase no domınio da frequencia que garanta uma margemde fase de 50◦.b. Determine o controlador discreto e a equacao recursiva do controlador, supondo que o perıodode amostragem e T = 2 seg.Obs: A frequencia esta em Hz.
A transformacao bilinear e w =2
T
z − 1
z + 1

EEL-DAS-UFSC 197
1 − e−sT
sK
2.083
s(s + 1.71)0.1R(z) Y (z)+
−
Figura 12.19: Exercıcio 6
0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2
−0.12
−0.08
−0.04
0
0.04
0.08
0.12
0.16
0.20
0.24
open loop zeroes◊
× ×
open loop poles×
Evans root locus
Real axis
Imag. axis
0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2
−0.12
−0.08
−0.04
0.00
0.04
0.08
0.12
0.16
0.20
0.24
Lugar das raizes
ζ = 0.5
Figura 12.20: Lugar das raızes para o Exercıcio 6
−310
−210
−110
010
110
210
310
−60
−40
−20
0
20
40
60
80
100
.
Magnitude
Hz
db
−310
−210
−110
010
110
210
310
−250
−230
−210
−190
−170
−150
−130
−110
−90
.
Phase
Hz
degrees
Figura 12.21: Diagrama de Bode para o Exercıcio 7