258570.pdf
106
Bernardo Ordoñez PROPOSTA DE CONTROLE DE OPERAÇÃO DE POÇOS COM BOMBEIO MECÂNICO ATRAVÉS DA PRESSÃO DE FUNDO FLORIANÓPOLIS 2008
-
Upload
patrick-araujo-de-jesus -
Category
Documents
-
view
27 -
download
4
Transcript of 258570.pdf
-
Bernardo Ordoez
PROPOSTA DE CONTROLE DE OPERAO DEPOOS COM BOMBEIO MECNICO ATRAVS DA
PRESSO DE FUNDO
FLORIANPOLIS2008
-
UNIVERSIDADE FEDERAL DE SANTA CATARINA
CURSO DE PS-GRADUAOEM ENGENHARIA DE AUTOMAO E SISTEMAS
PROPOSTA DE CONTROLE DE OPERAO DEPOOS COM BOMBEIO MECNICO ATRAVS DA
PRESSO DE FUNDO
Dissertao submetida Universidade Federal de Santa Catarina
como parte dos requisitos para aobteno do grau de Mestre em Engenharia
de Automao e Sistemas.
Bernardo Ordoez
Florianpolis - Junho de 2008.
-
ii
-
PROPOSTA DE CONTROLE DE OPERAO DE POOSCOM BOMBEIO MECNICO ATRAVS DA PRESSO DE
FUNDO
Bernardo Ordoez
Esta Dissertao foi julgada adequada para a obteno do ttulo de Mestre em Engenhariade Automao e Sistemas, rea de Concentrao em Controle, Automao e Sistemas, e
aprovada em sua forma final pelo Programa de Ps-Graduao em Engenharia deAutomao e Sistemas da Universidade Federal de Santa Catarina.
Orientador Ubirajara Franco Moreno
Prof. Eugnio de Bona Castelan NetoCoordenador do Programa de Ps-Graduao em Engenharia de Automao e Sistemas
Banca Examinadora:
Prof. Dr. Ubirajara Franco MorenoPresidente
Prof. Dr. Eduardo Camponogara
Prof. Dr. Valter Jnior de Souza Leite
Eng. Dr. Manuel de Almeida Barreto Filho
iii
-
iv
-
AGRADECIMENTOS
A meus pais Ana e Daniel que sempre apoiaram minha educao com bastante dedicao, e mais, no
posso pedir.
A minha irm Manuela, pelo simples lao fraternal que nos une, o que muito significa para mim.
Aos amigos e camaradas do "Sindicato do LCMI", que sempre se fez presente em eventos esportivos
(campeo do JECA 2007.2), churrascos, aniversrios, hora do caf... um prazer conviver com estaspessoas!
A meu amigo Helton pelo convvio salutar, e muitas vezes divertido. E tambm outro grande amigo
Rodrigo, pela grande receptividade na Ilha.
Aos professores e funcionrios do DAS e especialmente ao professor Ubirajara pela orientao, in-centivo e constantes conversas gerais.
A equipe do Projeto GeDIG, especialmente aos professores Eduardo e Agustinho pelo apoio e en-tusiasmo no desenvolvimento do projeto, e tambm ao colega Andrs Codas, parceiro de bombeiomecnico com muita ajuda e vontade de trabalhar.
Ao CENPES pelo auxlio financeiro, em especial os engs. Alex Teixeira e Sthener Campos.
v
-
vi
-
Resumo da Dissertao apresentada UFSC como parte dos requisitos necessrios para obteno dograu de Mestre em Engenharia de Automao e Sistemas.
PROPOSTA DE CONTROLE DE OPERAO DE POOSCOM BOMBEIO MECNICO ATRAVS DA PRESSO DE
FUNDO
Bernardo Ordoez
Junho/2008
Orientador: Ubirajara Franco Morenorea de Concentrao: Controle, Automao e SistemasPalavras-chave: Elevao Artificial, Bombeio Mecnico, Carta Dinamomtrica, Presso de Fundo eControle Gain-SchedulingNmero de Pginas: 1 + 84
Neste trabalho sobre o sistema de elevao artificial por bombeio mecnico avaliada a con-tribuio que a presso de fundo pode aportar ao sistema de controle de unidades de bombeio.Com o desenvolvimento de uma nova classe de sensores de fundo baseados em tecnologia defibra ptica e custo reduzido surge a possibilidade de aplicar novas estratgias de controle,e neste trabalho, proposto o controle VSD (Variable Speed Drive) com sintonia atravsde gain-scheduling para o controle dinmico do nvel no anular, o qual tem forte influnciasobre a produo de leo. Como proposta final utilizam-se em conjunto as informaes dacarta e presso de fundo para o controle sobre unidades de bombeio mecnico, o que possi-bilita trabalhar em um ponto timo de operao e diminuir os gastos com manuteno. Paraa simulao dos algoritmos de controle foi desenvolvido um simulador para o processo debombeio mecnico que faz parte de uma plataforma de trabalho que conta tambm com umCLP (onde esto implementados os algoritmos de controle) conectados atravs de tecnolo-gia OPC, caracterizando assim, uma situao com condies semelhantes aos campos deproduo.
vii
-
viii
-
Abstract of Dissertation presented to UFSC as a partial fulfillment of the requirements for the degreeof Master in Systems and Automation Engineering.
PROPOSAL OF SUCKER-ROD PUMPING SYSTEMSCONTROL USING BOTTOM HOLE PRESSURE
Bernardo Ordoez
June/2008
Advisor: Ubirajara Franco MorenoArea of Concentration: Control, Automation and SystemsKey words: Artificial Lifting, Sucker-Rod Pumping, Dynamometer Cards, Bottom Hole Pressure andGain-Scheduling ControlNumber of Pages: 1 + 84
In this work the sucker-rod pumping system is evaluated in order to evaluate the downholepressure contribution in the pump unit control. With the development of a new class of lowcost downhole sensors based in optical-fiber technology, new control strategies could beeapplied, and, a control framework using the downhole pressure combined with a VariableSpeed Drive (VSD) structure and gain-scheduling tunning is proposed to the dynamic levelcontrol of the annular, which has high influence on the oil production. The final proposalused the downhole pressure and dynamometer cards informations to the unit pump control,making possible to operate in the optimized operational point and to reduce the maintenancecosts. A hardware in the loop platform was developed for the controlled system simulation,composed by a process simulator (where the dynamic simulator for the sucker-rod pumpsystem is placed) and a CLP (where the control algorithms are placed) conected by OPCtechnology, which characterizes a situation with similar conditions to the production fields.
ix
-
x
-
Sumrio
1 Introduo 1
1.1 Bombeio Mecnico no Contexto GeDIg . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Motivao e Proposta de Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Trabalhos Relacionados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Organizao do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2 Elevao Artificial por Bombeio Mecnico 13
2.1 Aspectos de Operao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.1.1 Pancada de Fluido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Carta Dinamomtrica de Fundo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3 Modelagem e Simulador do Bombeio Mecnico . . . . . . . . . . . . . . . . . . . . 20
2.3.1 Descrio do Simulador . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.3.2 Dados do Poo de Produo . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.3.3 Curvas de Resposta do Simulador . . . . . . . . . . . . . . . . . . . . . . . 33
2.4 Concluso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3 Operao de Poo com Bombeio Mecnico 39
3.1 Metodologias de Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.1.1 Estratgia de Controle Pump-Off . . . . . . . . . . . . . . . . . . . . . . . 39
xi
-
3.1.2 Estratgia de Controle VSD . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.2 Controle do Sistema de Bombeio Mecnico Utilizando a CDF . . . . . . . . . . . . 41
3.2.1 Controle Pump-Off Utilizando a Carta Dinamomtrica de Fundo . . . . . . . 43
3.2.2 Controle VSD Utilizando a Carta Dinamomtrica de Fundo . . . . . . . . . 44
3.3 Simulao e Anlise dos Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.4 Concluso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4 Proposta de Operao de Poo com Bombeio Mecnico Utilizando a Presso de Fundo 53
4.1 Controle do Sistema de Bombeio Mecnico Utilizando a Presso de Fundo . . . . . . 53
4.1.1 Controle Pump-Off Utilizando a Presso de Fundo . . . . . . . . . . . . . . 54
4.1.2 Controle VSD Utilizando a Presso de Fundo . . . . . . . . . . . . . . . . . 55
4.2 Simulao e Anlise dos Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.3 Concluso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5 Proposta de Operao de Poos com Bombeio Mecnico Utilizando a Pwf e CDF 69
5.1 Caracterizao do Problema Atravs de Exemplo Ilustrativo . . . . . . . . . . . . . 70
5.2 Controle Utilizando Presso de Fundo e Carta Dinamomtrica de Fundo . . . . . . . 72
5.3 Simulao e Anlise dos Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.4 Concluso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6 Concluso 77
6.1 Perspectivas de Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
6.2 Trabalhos Desenvolvidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
xii
-
Lista de Abreviaturas
Smbolo
UB : Unidade de bombeio
CDF : Carta dinamomtrica de fundo
CDS : Carta dinamomtrica de superfcie
Pwf : Presso de fundo (Well flowing pressure)CPM : Ciclos por minuto
V SD : Velocidade de bombeio varivel (Variable Speed Drive)GeDig : Gerenciamento digital integrado de campos de petrleo e gs
RPC : Controlador de bombeio mecnico (Rod pump controller)POC : Controladores pump-off (Pump-off controllers)DTS : Sensoriamento distribudo de temperatura(Distributed temperature sensing)RGO : Razo gs-leo
BSW : Quantidade de gua no fluido (Basic sediment and water)RGL : Razo gs-lquido
EPT : Curso efetivo do pisto (Effective plunger course)MPT : Curso mximo do pisto (Maximum plunger course)
xiii
-
xiv
-
Lista de Figuras
1.1 Dinmicas variadas da produo de petrleo . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Proposta de controle do poo utilizando Pwf e CDF . . . . . . . . . . . . . . . . . . 5
2.1 Sistema de elevao artificial por bombeio mecnico . . . . . . . . . . . . . . . . . 14
2.2 Representao grfica do fenmeno da pancada de fluido . . . . . . . . . . . . . . . 17
2.3 Ciclo de bombeio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4 Carta dinamomtrica de fundo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.5 Carta dinamomtrica de fundo associada pancada de fluido . . . . . . . . . . . . . 20
2.6 Diagrama de blocos para o simulador de bombeio mecnico . . . . . . . . . . . . . 21
2.7 Sistema massa-mola-amortecedor para modelagem da coluna de hastes . . . . . . . . 23
2.8 Curva de IPR para o modelo linear . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.9 Esquema do poo de produo GeDIg CP-1316 . . . . . . . . . . . . . . . . . . . . 29
2.10 Hipteses de composio do fluido no anular do poo . . . . . . . . . . . . . . . . . 31
2.11 Plataforma de trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.12 Ensaio sobre o nvel de equilbrio do anular . . . . . . . . . . . . . . . . . . . . . . 34
2.13 Ensaio sobre o potencial da vazo de formao do reservatrio . . . . . . . . . . . . 34
2.14 Comportamento dinmico da coluna de hastes . . . . . . . . . . . . . . . . . . . . . 35
2.15 Evoluo da presso de fundo em malha aberta . . . . . . . . . . . . . . . . . . . . 36
2.16 Evoluo da velocidade de bombeio em malha aberta . . . . . . . . . . . . . . . . . 36
xv
-
2.17 Evoluo do nvel do anular em malha aberta . . . . . . . . . . . . . . . . . . . . . 36
2.18 Evoluo da vazo de formao em malha aberta . . . . . . . . . . . . . . . . . . . 37
3.1 Controle do sistema de bombeio mecnico utilizando a CDF . . . . . . . . . . . . . 42
3.2 Determinao do ponto de pump-off . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.3 Analogia entre o padro da pancada de fluido e o enchimento da cmara da bomba . 44
3.4 Diagrama de blocos para o controle pump-off utilizando a CDF . . . . . . . . . . . . 44
3.5 Algoritmo de controle pump-off utilizando a CDF . . . . . . . . . . . . . . . . . . . 45
3.6 Diagrama de blocos para controle VSD utilizando a CDF . . . . . . . . . . . . . . . 45
3.7 Algoritmo de controle VSD utilizando a CDF . . . . . . . . . . . . . . . . . . . . . 46
3.8 Evoluo da Pwf para o controle pump-off utilizando a CDF . . . . . . . . . . . . . 47
3.9 Evoluo do sinal de controle para vbombeio = 8 CPM . . . . . . . . . . . . . . . . . 47
3.10 Evoluo da Pwf para o controle VSD utilizando a CDF (70%) . . . . . . . . . . . . 48
3.11 Velocidade de bombeio para o controle VSD utilizando a CDF (70%) . . . . . . . . 49
3.12 Evoluo da Pwf para o controle VSD utilizando a CDF (95%) . . . . . . . . . . . . 49
3.13 Velocidade de bombeio para o controle VSD utilizando a CDF (95%) . . . . . . . . 50
4.1 Diagrama de blocos para o controle pump-off utilizando a Pwf . . . . . . . . . . . . 55
4.2 Algoritmo de controle pump-off utilizando a Pwf . . . . . . . . . . . . . . . . . . . 55
4.3 Diagrama de blocos para o controle VSD utilizando a Pwf . . . . . . . . . . . . . . 56
4.4 Ensaio em malha aberta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.5 Mtodos de identificao de Ziegler-Nicholls e Hagglund . . . . . . . . . . . . . . . 57
4.6 Parmetros K e para diferentes cenrios de reservatrio . . . . . . . . . . . . . . . 58
4.7 Efeito do filtro passa-baixas sobre a presso de fundo . . . . . . . . . . . . . . . . . 61
4.8 Evoluo da Pwf para vbombeio = 8 CPM - Controle pump-off . . . . . . . . . . . . . 63
xvi
-
4.9 Evoluo do sinal de controle para vbombeio = 8 CPM - Controle pump-off . . . . . . 63
4.10 Evoluo de Pwf para vbombeio = 12 CPM - Controle pump-off . . . . . . . . . . . . 64
4.11 Evoluo do sinal de controle para vbombeio = 12 CPM - Controle pump-off . . . . . 64
4.12 Evoluo da presso de fundo utilizando Pwf - Controle VSD . . . . . . . . . . . . 65
4.13 Evoluo da velocidade de bombeio utilizando Pwf - Controle VSD . . . . . . . . . 65
4.14 Comparao entre o tempo de resposta dos controles com Pwf e CDF . . . . . . . . 67
5.1 Diagrama de blocos para integrao dos controles . . . . . . . . . . . . . . . . . . . 70
5.2 Evoluo no nvel no anular - Exemplo ilustrativo . . . . . . . . . . . . . . . . . . . 71
5.3 Evoluo do enchimento da cmara da bomba de fundo - Exemplo ilustrativo . . . . 71
5.4 Diagrama de blocos com realimentao da Pwf e CDF . . . . . . . . . . . . . . . . 72
5.5 Associao entre o nvel da pancada de fluido e a nova referncia de Pwf . . . . . . 73
5.6 Variao de BSW ao longo do tempo . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.7 Comportamento do nvel no anular frente a mudanas na operao . . . . . . . . . . 75
5.8 Comportamento da Pwf frente a mudanas na operao . . . . . . . . . . . . . . . . 76
xvii
-
xviii
-
Lista de Tabelas
3.1 ndices de produo para o controle pump-off utilizando a CDF . . . . . . . . . . . . 48
3.2 ndices de produo para o controle VSD utilizando a CDF . . . . . . . . . . . . . . 49
4.1 Limites de freqncia para a velocidade de bombeio [CPM] . . . . . . . . . . . . . . 61
4.2 ndices de produo para o controle pump-off utilizando a presso de fundo . . . . . 65
4.3 ndices de produo para o controle VSD utilizando a presso de fundo . . . . . . . 66
4.4 ndices de produo para o controle VSD . . . . . . . . . . . . . . . . . . . . . . . 67
xix
-
xx
-
Captulo 1
Introduo
O sistema de bombeio mecnico um mtodo de elevao artificial utilizado em instalaes ter-
restres (termo muitas vezes denominado como onshore), e data como umas das primeiras tcnicas deelevao utilizadas na indstria do petrleo. Dado este motivo histrico, o sistema de bombeio apre-
senta um carter de desenvolvimento mecnico dos seus componentes bastante consolidado, porm,
quando atenta-se sobre as estratgias de controle e novas tecnologias de sensores de fundo, existem
alguns aspectos passveis de melhorias com o intuito de incrementar a produo e tambm diminuir
os custos relacionados manuteno do processo.
Essencialmente, o bombeio mecnico baseado em um mtodo que transforma um movimento
rotativo do motor principal (energia eltrica) em um movimento alternativo atravs da viga principal,e este por sua vez transferido para a bomba de fundo pelo conjunto de hastes na forma de um deslo-camento vertical que fornece energia mecnica ao fluido propiciando sua elevao at a superfcie.
A operao do sistema de bombeio mecnico requer o monitoramento ininterrupto do compor-
tamento da bomba de fundo, j que grande parte dos problemas relacionados ao desempenho da UBocorre sobre os elementos que constituem a bomba de fundo. Para este monitoramento do sistema as
cartas dinamomtricas de fundo constituem uma ferramenta bastante conhecida na indstria e repre-
sentam o comportamento da carga atuante na bomba de fundo vs deslocamento do pisto refletidos
na superfcie atravs da coluna de hastes.
A automatizao de poos est caracterizada pela utilizao de instrumentos e sensores que tm
o objetivo de monitorar algumas variveis de interesse referentes ao processo. No bombeio mecnico,basicamente duas medies esto disponveis mediante o uso de sensores de carga e posio, so elas:
posio e carga referidas haste polida. Estas duas variveis correspondem aos dados fornecidos para
-
1. Introduo 2
a gerao da CDS e so medidas na superfcie. A carta de fundo calculada a partir desses dados
fornecidos na superfcie utilizando modelos para o movimento dinmico da coluna de hastes. Para o
controle do sistema de bombeio importante contar com sensores de fundo, principalmente sobre a
presso no fundo do poo, j que a propagao de efeitos at a superfcie pela coluna de hastes podesofrer alteraes significativas. Sendo assim, vrios esforos foram realizados com intuito de obter
dados consistentes sobre a presso de fundo, alguns mtodos diretos como sensores e transdutores de
presso, e outros mtodos indiretos como modelos e equacionamentos matemticos [Gibbs, 1963],[Wang, 2001], [Shepherd et al., 1999].
Na indstria petrolfera existem duas principais estratgias de controle, so elas: os controles
pump-off e VSD. A primeira delas apresenta as limitaes de um controle liga e desliga (compor-tamento dinmico e erro em regime permanente), e a segunda, permite alterar a caracterstica dobombeio atravs da variao da velocidade de bombeio, definida em CPM, com a utilizao de um
inversor de freqncia. Os controladores so utilizados fundamentalmente para assegurar o enchi-
mento completo da bomba visando um mximo de produo, evitando assim, problemas causados
pelo enchimento parcial da bomba. Estes problemas podem ser a pancada de fluido e desgastes nos
componentes da bomba. O desempenho da bomba est associado ao balano volumtrico de entrada
(vazo de formao do reservatrio) e sada de fluido (vazo de produo da unidade de bombeio), etambm a problemas no funcionamento mecnico da bomba de fundo. Outro fator importante no de-
sempenho da bomba que reflete sobre o controlador, est associado ao ponto de operao relacionado
a um nvel de fluido no anular. Este ponto de operao caracterizado pelo enchimento completo da
bomba com a menor presso de fundo possvel, o que proporciona uma menor contra presso sobre
os canhoneados do reservatrio, e incrementa a vazo de formao. O nvel associado a este ponto
prximo suco da bomba.
Em maio de 2007 foram realizadas visitas tcnicas aos campos de produo de Carmpolis (SE)e Aras (BA), alm de uma participao em um curso sobre a automatizao do bombeio mecnicorealizado em Taquipe (BA), todos estes campos de produo pertencem a Petrobras. Em Carmpolisest instalado um piloto do projeto GeDIg que conta com seis poos operando com elevao artificialpor bombeio mecnico com caractersticas prprias, como a completao inteligente e painis de
controle e eltrico localizados na superfcie com equipamentos diferenciados, como o inversor de
freqncia que possibilita trabalhar com a estratgia de controle VSD. Em Carmpolis localiza-se o
maior campo de produo terrestre da Petrobras no Brasil. Em Aras, o campo de produo conta
com um sistema automatizado para o bombeio mecnico desenvolvido da unidade da Petrobras na
Bahia.
-
1.1. Bombeio Mecnico no Contexto GeDIg 3
Estas visitas contriburam bastante para o entendimento do processo geral do bombeio mecnico.
Em visitas s oficinas de manuteno constataram-se as dificuldades encontradas na operao no
fundo do poo, na qual visilmente os componentes da bomba de fundo encontravam-se danificados
dada a presena de areia, parafina e golpes mecnicos sobre os mesmos, ocasionado pela pancada de
fluido. Aspectos importantes sobre as estratgias de controle tambm foram discutidos, alm de obter
detalhes acerca das estratgias de controle atualmente empregadas, como o pump-off, em discussesficou ressaltada a importncia de medies de fundo de poo na otimizao da produo.
1.1 Bombeio Mecnico no Contexto GeDIg
A pesquisa sobre a utilizao da presso de fundo para o controle da operao de poos com
bombeio mecnico est inserida no contexto do GeDIg, que caracteriza-se por ter uma viso sistmica
do campo de produo. Dado este carter colaborativo entre os elementos do campo de produo,
pretende-se desenvolver um sistema integrado que incorpore novas medies disponveis (em espe-cial medies de fundo) e seja capaz de tomar as decises corretas conforme o cenrio avaliado,considerando as diferentes dinmicas que esto involucradas ao campo de produo, vide Figura 1.1.
MalhaRpida
MalhaLenta
CompletaoInteligente
AutomaodaElevao Artificial
OtimizaodaProduo
OtimizaodaProduo
AnlisedeRiscoEconmico
ModelagemdoReservatrio
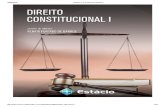
Figura 1.1: Dinmicas variadas da produo de petrleo
Na Figura 1.1 so mostrados processos que tm dinmicas diferentes e por isso, necessrio
separar e analisar cada malha de acordo com caractersticas prprias. O processo de completao in-
teligente, automao de tcnicas de elevao artificial e otimizao da produo requerem um acom-
panhamento dirio, e em alguns casos, em tempo real. A pesquisa sobre o poo operando com
bombeio mecnico utilizando a presso de fundo encaixa-se nesse contexto de tempo real. Por outro
lado, existem dinmicas mais lentas, como estudos sobre o histrico da produo, avaliao e mode-
-
1. Introduo 4
lagem do reservatrio e anlise de riscos, e por isso, possibilitam um maior tempo de estudo e anlise.
O objetivo entender o poo de produo como a unio destas dinmicas, e tomar decises avaliandotodos estes elementos.
O projeto est alinhado com o conceito de poos inteligentes (do termo ingls, smart wells), noqual existe um processo de completao, denominado inteligente, que est associado a equipamentos
de fundo que proporcionam novas medies sobre presso, temperatura e composio de fluxo. Neste
trabalho ressalta-se a importncia que a presso de fundo pode aportar ao controle. Ainda sobre o
GeDIg, cada poo de produo est inserido no contexto de campos inteligentes (do termo ingls,smart fields), que alm do prprio poo de produo, preocupa-se no controle sobre os equipamentosde superfcie e reservatrio, que leva a um objetivo final que a otimizao do funcionamento docampo de produo.
1.2 Motivao e Proposta de Trabalho
Nos poos que operam com bombeio mecnico utilizada como ferramenta principal de con-
trole e monitoramento as cartas dinamomtricas de superfcie e fundo. Dado o histrico de uso desta
ferramenta, admite-se que estas representam um correto diagnstico sobre o funcionamento dos com-
ponentes da bomba de fundo, e portanto, acerca do desempenho de bombeio. Porm, sob o contexto
de controle as cartas limitam o desempenho da produo de leo. Os motivos para tal empecilho
baseiam-se no tempo demandado por um algoritmo especfico para gerar a carta de fundo, que efe-
tivamente auxilia no controle, e tambm o custo computacional que envolve o reconhecimento de
padres de cartas, que baseado em tcnicas de inteligncia artificial.
Ainda que a gerao da carta de fundo e o reconhecimento do padro sejam realizados combastante rapidez e disponibilizem a informao da carta em tempo real, a prpria proposta que utiliza
exclusivamente a carta no controle no permite que a bomba de fundo trabalhe constantemente com
enchimento completo, e dado este motivo, acredita-se que existem possibilidades de melhoria no
controle com a adio de novas informaes sobre outras variveis envolvidas no processo.
Segundo Vazquez e Fernandes [1999], o monitoramento da presso de fundo em tempo realpermite maximizar a produo de leo, minimizar os custos operacionais e estender a vida til
dos equipamentos envolvidos diretamente no bombeio mecnico, uma vez que o comportamento
dinmico da presso de fundo afetado rapidamente por qualquer discrepncia na operao da
unidade de bombeio. Existe portanto, uma correlao entre o comportamento da presso de fundo e
a condio de operao da bomba de fundo.
-
1.2. Motivao e Proposta de Trabalho 5
O desenvolvimento de sensores de fundo com baixo custo possibilitam a adio da informao
da presso de fundo (Pwf ) ao controle do poo de bombeio mecnico para verificar possveis ganhosna produo de leo. O objetivo principal utilizar a presso de fundo para estimar o nvel de fluidono anular, e assim, trabalhar em conjunto com estas duas informaes: carta de fundo (associadaao enchimento da cmara do pisto) e presso de fundo (associada ao monitoramento do nvel noanular). A perspectiva sobre esta estratgia hbrida entre Pwf e CDF incrementar a produo deleo sem a necessidade da pancada de fluido (importante fenmeno que pode acentuar o desgaste doscomponentes da bomba de fundo), o que certamente levar a menores custos com a manuteno dosequipamentos.
ProcessodoBombeioMecnico
Controlecom Pwf
Nvel no AnularPrximo aSucodaBomba(produo)
MonitoramentosobreaPancadadeFluido(manuteno)
Controlecom aCDF
Pwf_ref Pwf
Figura 1.2: Proposta de controle do poo utilizando Pwf e CDF
Na Figura 1.2 ilustrado o cenrio descrito anteriormente, mostrando o impacto que a presso
de fundo pode causar no controle do poo de produo. A possibilidade de aliar informaes de
sensores de superfcie e fundo importante para fundamentar a investigao do bombeio mecnico
sobre os conceitos do GeDIg, envolvendo os elementos do campo de produo de forma conjuntacom o intuito de incrementar a produo do poo de petrleo.
Dado este carter investigativo do trabalho, prope-se:
Desenvolver um simulador para o bombeio mecnico com baixo custo computacional que pos-
sibilite o teste de estratgias de controle;
Desenvolver um algoritmo de controle para a operao de poo com bombeio mecnico baseado
na presso de fundo;
Consolidar uma estratgia de controle que utilize de forma conjunta dados da presso de fundoe carta dinamomtrica de fundo.
-
1. Introduo 6
1.3 Trabalhos Relacionados
As publicaes sobre o sistema de bombeio mecnico so freqentes no mbito da indstria
do petrleo, assim, elas so basicamente encontradas em peridicos e congressos relacionados a este
segmento industrial. Os artigos sobre o processo podem ser divididos em trs reas de interesse: (1)Modelagem do sistema para desenvolvimento do simulador do bombeio mecnico, (2) Operao depoos com bombeio mecnico para contextualizar as principais ferramentas e estratgias de controle
utilizadas pela indstria, e (3) Sensoriamento do poo de produo na indstria do petrleo, no qual realizada uma exposio sobre trabalhos relevantes que envolvem o desenvolvimento da tecnologia
de sensores de fundo.
Modelagem do Bombeio Mecnico
O modelo fenomenolgico do sistema de bombeio mecnico foi gradativamente melhorado
com a adio de termos relacionados dinmica do sistema, sempre com intuito de obter condies
de simulao prximas realidade encontrada em poos de produo de petrleo. O avano das
ferramentas computacionais constituiu-se em um importante fator para o refinamento das equaes
que descrevem o sistema em questo.
O Mtodo de Mill (1930s), um dos primeiros mtodos de modelagem, assume um modelosimplificado, no qual se admitem duas equaes para situaes limites de carga atuante (mxima emnima) sobre a coluna de hastes submetida apenas s aceleraes, alm de negligenciar a inrcia dofluido. A dinmica do conjunto de hastes modelada como um movimento harmnico simples em quese considera a massa da haste concentrada. Uma grande contribuio para a modelagem do sistema
apresentada em Gibbs [1963], no qual proposto um modelo matemtico para o comportamentodinmico da coluna de hastes, atravs de uma equao diferencial (equao da onda amortecida)e uma regio de condies limites. A discusso do modelo de Gibbs baseia-se em trs principais
fatores: a equao da onda, o movimento do conjunto de hastes e as condies de operao da bombade fundo.
O modelo de Gibbs alvo de estudo em Lea [1991]. Para as foras de amortecimento nashastes anteriormente atribudas empiricamente atravs de um coeficiente que utilizava a velocidade
local das hastes, modelada uma expresso para este coeficiente de amortecimento em funo da
viscosidade do fluido e dimetros do pisto, tubulao e hastes. Ainda um outro avano sobre o
comportamento dinmico do fluido encontrado em Doty e Schimidt [1983], no qual proposto ummodelo matemtico que incorpora a dinmica da coluna de fluido, incluindo as propriedades fsicas
-
1.3. Trabalhos Relacionados 7
deste, como os efeitos de inrcia e viscosidade do fluido. Essas propriedades exerceram um papel
importante no estudo do curso do pisto, mximo e mnimo de carga atuante nas hastes, potncia do
motor e carga atuante na bomba de fundo.
O importante trabalho de Snyder e Bossert [1963] trata de uma simulao completa sobre osistema do bombeio mecnico. Existiam limitaes tecnolgicas poca que limitavam a capacidade
de processamento, porm, os conceitos bsicos sobre grande parte dos fenmenos ocorridos durante
o ciclo de bombeio so de grande valia para entendimento do processo, e o acoplamento que existe
entre as variveis de processo.
Operao de Unidades de Bombeio Mecnico
Os controladores industriais esto em sua maioria associados a sistemas automatizados respon-
sveis por um gerenciamento total do poo de produo, este carter integrador foi um dos principais
impulsores da expanso do uso de controladores automticos no bombeio mecnico. Existem dois
principais tipos de controladores industriais, so eles os controladores pump-off e VSD. A escolha poruma das estratgias de controle d-se por condies de localizao dos poos, polticas empresariais,
espao fsico e viabilidade no caso dos controladores VSD, entre outros fatores que contribuem na
avaliao final, como custos iniciais de instalao e capacidade de produo do poo de petrleo.
Existe uma linha de controladores industriais, denominados RPC ou POC, que utilizam em
sua maioria o controle pump-off para determinar o tempo de desligamento da unidade de bombeio,cessando assim o movimento da bomba, monitorando as mudanas ocorridas na elaborao das res-
pectivas cartas de fundo para cada ciclo de bombeamento, ou um nmero determinado de ciclos
[Boyer et al., 2007], [Weatherford, 2007]. A razo custo/benefcio dos controladores pump-off umdos motivos da sua vasta aplicao nos poos terrestres, e tem sua utilizao aconselhada para poos
com pouca produo onde um custo inicial em equipamentos mais sofisticados para um controle mais
apurado no ser convertido em produo. Assim, dada a simplicidade de controle (liga e desliga), arelao custo/benefcio fica fortemente evidenciada.
Alguns trabalhos pioneiros com o controle VSD j indicam os benefcios que os inversores defreqncia propiciam ao controle da unidade, destacando a estabilidade que o controle proporciona
vazo de sada, mesmo com alguma presena de gs no fluido. Os custos iniciais com a instalao
de equipamentos so superados pelos ganhos em produtividade e capacidade de lidar com problemas
como a presena de areia ou partculas slidas no fluido dado a flexibilidade na velocidade de bombeio
[Collins e Autrey, 1986].
-
1. Introduo 8
Sobre o controle VSD, um importante trabalho realizado em Peterson et al. [2006], no qualexplana-se a utilizao destes controladores em um campo de produo com 100 unidades de bombeio
mecnico com intuito de melhorar o comportamento do sistema em aspectos tais como otimizao da
produo, diminuio dos custos de manuteno e utilizao racional de energia eltrica. O resultado
foi um incremento mdio de 21% da produo de fluido. O controlador tambm foi capaz de inferir
resultados sobre outras caractersticas importantes do sistema como problemas nas vlvulas de p e
passeio, parmetros eltricos do motor e o comportamento da bomba.
Existe uma grande quantidade de dados que as CDFs fornecem sobre o estado do sistema e
importante um diagnstico rpido acerca do comportamento da bomba de fundo. Nesse contexto,
tcnicas baseadas em inteligncia artificial (Sistemas Especialistas, Lgica Fuzzy, Redes Neuronais)auxiliam em tempo real o monitoramento remoto do sistema, e uma rpida resposta frente a problemas
na unidade possibilita a maximizao da produo, reduo do custo de operao mnimo e o aumento
da vida til do equipamento [Derek et al., 1988], [Vazquez e Fernandes, 1999].
Existem diversos padres de cartas identificados na literatura, cada qual associado a deter-
minadas caractersticas e efeitos que ocorrem durante o bombeamento. Alguns destes efeitos so:
pancada de fluido, interferncia de gs na produo, vazamento nas vlvulas (passeio ou p), anco-ragem deficiente da coluna de produo, ruptura da coluna de hastes e pisto preso. Porm, quando
ocorre a superposio destes efeitos, a classificao da carta dinamomtrica bastante dificultada,
j que nestes casos no existem padres com aplicao genrica. Em Corra [1998], para anlisedo poo, um conjunto de pontos significativos extrado e avaliado utilizando-se princpios de redesneurais e funes nebulosas, e como resultado, faz-se a comparao dos padres com as cartas de
fundo geradas na coluna de produo. Ainda, em Takacs [2007] proposta uma tcnica alternativapara o processamento de cartas convencionais na qual so utilizados padres associados a condies
normais para inferir as condies de bombeio.
Os controladores tm papel importante na preveno de problemas na unidade de bombeio.
Sobre esses problemas, em Muth e Walker [2001] tratada a questo da areia nos poos de produo,que produzida juntamente com hidrocarbonetos e gua. Essa areia pode acelerar o desgaste do pistoe da bomba, estes problemas so geralmente resolvidos com freqentes trabalhos de manuteno,
porm, tal processo tem alto custo j que necessrio desligar a UB e utilizar o trabalho com sonda.Outros custos operacionais relacionados ao bombeio mecnico so os reparos necessrios relaciona-
dos s hastes e tubulao e revestimento, no qual alguns poos so levados a reparos freqentemente,
tornando-se marginalmente econmicos. Este problema tem efeito acentuado pelos dias de perda de
produo [Bommer e Shrauner, 2006].
-
1.3. Trabalhos Relacionados 9
Em McCoy et al. [2003] destaca-se que um dos principais problemas de eficincia o enchi-mento incompleto da bomba, isto causado quando a capacidade da bomba excede a produo do
reservatrio, ou tambm existe uma pobre separao de gs na entrada da bomba, e assim, perde-se
um pouco de deslocamento til do pisto devido interferncia do gs. Para operaes mais eficientes
e utilizao de pouca potncia, sugere-se trabalhar com a bomba cheia de fluido. O primeiro passo
eliminar qualquer interferncia de gs na bomba, e livrar a bomba de problemas mecnicos, e assim,
o passo seguinte otimizar o deslocamento da bomba para remover todo fluido disponvel no poo
apto para elevao.
Sensoriamento do Poo de Produo na Indstria do Petrleo
O desenvolvimento de uma tecnologia de sensoriamento nos poos de produo que disponibi-
liza novas informaes sobre variveis principalmente do fundo do poo, tais como presso, tempera-
tura e fluxo est sob o contexto do GeDIg associado ao conceito de completao inteligente, mas que
tambm pode ser denominado por "poos do futuro", que entre suas vrias linhas de pesquisa, trata
o sensoriamento de fundo do poo como uma forte rea para desenvolvimento, com o objetivo detornar um poo anlogo ao que encontra-se atualmente em processo industrial qualquer em questes
de sensores [Knabe et al., 2008], [Mubarak, 2008].
O monitoramento das variveis em tempo real atravs de um gerenciamento digital do poo
de produo pode ser denominado por vrios nomes, porm, ressalta-se a importncia dos resultados
obtidos sobre a produo de leo, onde existe preocupao no desenvolvimento de recursos humanos
e tecnologia para melhorar a produo e segurana do processo atravs da correta utilizao da infor-
mao em tempo real [Cramer, 2008].
Para maiores informaes sobre o conceito de GeDIg pode-se procurar em Moiss et al. [2008].Neste trabalho est destacado o campo piloto de Carmpolis onde foi realizada a completao in-
teligente com quatro medies de temperatura e presso utilizando sensores de fibra tica [Pinto et al.,2006]. Este trabalho est baseado nos poos de Carmpolis, e como j mencionada, ainda em fase depesquisa, foi realizada uma visita tcnica ao campo de produo de Carmpolis (SE).
A tecnologia de sensores de fibra ptica na indstria possibilitou uma nova viso acerca de
sensores permanentes de fundo de poo j que existe uma medio contnua da varivel envolvida noprocesso que pode auxiliar na tomada de deciso sem a necessidade de parada do poo. A adoo
desta tecnologia conta com aceitao cada vez mais consolidada desde sua introduo em meados dos
anos 90, e conta principalmente com sensores de fundo para presso, temperatura e fluxo [Wang et al.,
-
1. Introduo 10
2008], [Smith et al., 2008] . Desde que o primeiro sensor de fibra ptica para presso e temperaturafoi instalado na Europa, 1993, foram desenvolvidos sensores com vrias caractersticas e capaci-dades, tais como: DTS, que no necessita equipamentos eltricos/eletrnicos para medio, e suporta
condies adversas com grande capacidade de transmisso de dados. Mais especificamente sobre a
medio de presso, foi instalado no Golfo do Mxico em 2000 um sensor sobre o packer de produo
e at hoje funciona e auxilia no monitoramento do reservatrio justificando plenamente sua utilizao[Drakeley e Omdal, 2008].
Outra tecnologia surgente no sensoriamento de poos de petrleo envolve os sensores sem fio,
que conta com potencial custo-benefcio para soluo de vrias aplicaes de produo e explotao.
Um sistema de comunicao capaz tambm de monitorar variveis tanto analgicas como digitais
em diversos mtodos de elevao artificial. So admitidos sistemas que avaliam o enlace de comu-
nicao em relao quantidade de pacotes perdidos em diferentes ambientes de explorao, outro
diferencial que as redes sem fio proporcionam o baixo custo aliados a sensores de baixa potncia
que disponibilizam informao de diversas variveis em diferentes pontos do processo, o que pos-
sibilita otimizar a produo e ter maior segurana sobre a evoluo do processo [Campos, 2006],[Petersen et al., 2008].
1.4 Organizao do Trabalho
A dissertao est fundamentada sob a seguinte estrutura de captulos brevemente descritos:
Captulo 1 - Introduo
Neste captulo apresentado o tema da dissertao e a motivao para o desenvolvimento
do trabalho. Ainda so discutidos alguns artigos relevantes na rea da pesquisa, e por fim
mostrada a organizao desta dissertao.
Captulo 2 - Elevao Artificial por Bombeio Mecnico
O funcionamento do sistema elevao artificial por bombeio mecnico apresentado neste
captulo, no qual se ressaltam as ferramentas e os fenmenos associados ao processo. Uma
modelagem do processo desenvolvida, o que culmina na proposta de um simulador com
objetivo especfico de testar as estratgias de controle. Ainda, uma importante discusso sobrea estimao do nvel no anular utilizando a presso de fundo tratada no captulo.
Captulo 3 - Operao de Poo com Bombeio Mecnico
-
1.4. Organizao do Trabalho 11
As estratgias de controle VSD e pump-off so abordadas destacando-se as principais carac-tersticas de cada uma. Uma emulao para o controle utilizando a carta dinamomtrica de
fundo proposta, e os resultados alcanados so mostrados e discutidos.
Captulo 4 - Proposta de Operao de Poos com Bombeio Mecnico Utilizando a Pressode Fundo
Neste captulo so tratados os principais aspectos de cada estratgia de controle baseada ex-
clusivamente na presso de fundo (Pwf ). O controle pump-off discutido sob a perspectivada presso de fundo, e uma metodologia de sntese para os controladores desenvolvida con-
siderando o controle VSD associado a uma sintonia gain scheduling. Os resultados obtidos soavaliados e comparados com os do captulo anterior.
Captulo 5 - Proposta de Operao de Poos com Bombeio Mecnico Utilizando a Pwf eCDF
No captulo proposta uma estratgia de controle hbrido baseado nos dados da presso de
fundo e carta dinamomtrica, onde a presso de fundo permite o controle de nvel dinmico no
anular, e a informao da CDF utilizada na avaliao da estimativa de nvel no anular. Por
fim, faz-se um estudo sobre a eficincia energtica que a presso de fundo aporta ao controle
da unidade de bombeio.
Captulo 6 - Concluso
Finalmente, so relatadas as concluses acerca da introduo da presso de fundo na operao
de poos com bombeio mecnico, algumas perspectivas de trabalhos futuros so apresentadas.
-
1. Introduo 12
-
Captulo 2
Elevao Artificial por BombeioMecnico
Os mtodos de elevao artificial tm como objetivo propiciar as melhores condies possveispara a extrao de petrleo, dada pela elevao de fluido do reservatrio at a superfcie. O reser-
vatrio definido como uma rocha formada por espaos vazios, que definem a porosidade da mesma,
que podem estar interconectadas ou no e tm capacidade de armazenar fluido. Em grande parte dos
poos de produo, no incio da vida produtiva do poo a presso do reservatrio suficientemente
elevada para emergir os fluidos l presentes, e portanto, denominado como poo surgente (do termoingls, flowing well). Contudo, dado que exista uma produo contnua ao longo dos anos, a pressodo reservatrio decresce impossibilitando a elevao natural do fluido devido s perdas de presso no
caminho de elevao. Neste momento da vida til do poo, faz-se necessrio a utilizao de algum
mtodo de elevao artificial, que fornecer de alguma forma energia ao fluido para sua elevao
[Takcs, 2003], [Filho, 1993].
Entre os mtodos de elevao artificial, o presente trabalho aponta na direo do bombeio
mecnico, que caracteriza-se pelo baixo custo com investimentos e manuteno, flexibilidade na
vazo e profundidade, boa eficincia energtica e possibilidade de operar com fluidos com diferentes
composies e viscosidades em uma larga faixa de temperatura [Nascimento, 2004], [Campos, 2006].
Para contextualizar as principais caractersticas da elevao artificial por bombeio mecnico,
o sistema pode ser dividido entre os equipamentos de superfcie e fundo, conforme mostrado na
Figura 2.1. A principal caracterstica deste mtodo transformar a energia eltrica entregue ao motor
principal em energia mecnica fornecida para o fluido atravs da coluna de hastes e bomba de fundo,
possibilitando assim, a elevao de fluido at a superfcie. Com o intuito de facilitar a explicao
-
2. Elevao Artificial por Bombeio Mecnico 14
sobre os elementos que constituem o sistema, os mesmos sero apresentados sob a forma de itens
com suas respectivas funcionalidades.
Motor
Contrapeso
Haste Polida
Mesa doCabrestoRedutor
Balancim
Trip
Cabea doCavaloContrapeso
ColunadeHastes
Pisto
Vlvula deP
Vlvula dePasseio
ZonaProdutora(MeioPoroso)
Camisa
Revestimento
Tubulao
ElementosdeFundo
ElementosdeSuperfcie
Figura 2.1: Sistema de elevao artificial por bombeio mecnico
Elementos de Superfcie:
- Motor: o elemento responsvel por fornecer potncia coluna de hastes atravs da energiaque recebe da rede eltrica. Uma das principais variveis envolvidas no processo relaciona-se
ao motor principal, denominado como CPM da unidade e tambm, a forma com que se define
a velocidade de bombeio;
- Redutor: Reduz a alta velocidade do motor principal para a velocidade de bombeio (CPM);
- Contrapeso: Existe uma diferena de carga exercida na coluna de hastes na sucesso dos
movimentos ascendente e descendente e este discrepante comportamento no aconselhvel
ao motor. Assim, o contrapeso utilizado para que o motor no trabalhe com um torque muito
-
2.1. Aspectos de Operao 15
diferente entre estes movimentos. Durante a subida o contrapeso auxilia o motor a levantar toda
a coluna de hastes, aliviando um pouco a carga sobre o motor; e no ciclo de descida, a coluna
hidrosttica o principal responsvel pelo movimento, porm o contrapeso agora aumenta o
torque sobre o motor, e assim, durante todo o ciclo de bombeio, o motor trabalhar com um
torque equivalente;
- Balancim (ou Viga Principal): Tem importante funo de transladar a energia eltrica rota-tiva do motor para um movimento alternativo da coluna de hastes. Constitui o denominado
"cavalinho mecnico"que caracteriza visualmente esta tcnica de elevao artificial;
- Haste Polida: Este elemento fica exposto intemprie, e por isso, tem um acabamento e
constituio diferenciados em relao as demais hastes de todo o conjunto que fica abaixo dasuperfcie. Na haste polida encontra-se acoplado o sensor de carga;
- Trip: a estrutura mecnica que suporta a viga principal. No trip est localizado o sensor deposio para o movimento da haste polida, responsvel por um dos dados da carta de superfcie.
Elementos de Fundo:
- Coluna de Hastes: O conjunto o elo mecnico entre a UB (superfcie) e a bomba de fundo.Atravs deste elo, a potncia do motor transmitida bomba de fundo pelo conjunto, dado osatritos existentes sobre este movimento, existe uma perda da potncia fornecida pelo motor na
superfcie;
- Bomba de Fundo: O diferencial de presso fornecido ao fluido para que este se eleve dire-
tamente provido pela bomba de fundo, e por isso, a bomba de fundo considerada o elemento
ativo do sistema de bombeio mecnico. A bomba de fundo possui uma parte mvel que o
pisto que est conectado diretamente ao conjunto de hastes, nele encontra-se a vlvula de pas-seio. A parte fixa da bomba denominada por camisa, e nela est localizada a vlvula de p. atravs desta vlvula que ocorre a suco do fluido para o interior da bomba.
2.1 Aspectos de Operao
Nesta subseo pretende-se introduzir alguns fenmenos que ocorrem no bombeio mecnico,
com destaque a pancada de fluido. Alguns fenmenos relacionados gerao da carta dinamomtrica
de fundo podem ser interpretados de forma qualitativa. Estes aspectos so importantes na anlise do
comportamento do sistema de bombeio mecnico.
Elasticidade das Hastes:
-
2. Elevao Artificial por Bombeio Mecnico 16
Este fenmeno ocorre devido ao carregamento e descarregamento da bomba. Durante o ciclo de
subida, conforme a cmara da bomba preenchida pelo fluido, a carga sobre a coluna de hastes
aumenta, provocando um alongamento destas. J no ciclo de descida, conforme a cmara da
bomba descarregada, a carga sobre o conjunto de hastes diminui, provocando uma contraodestas, que retornam ao seu comprimento inicial.
Foras de Acelerao:
No incio do ciclo de subida, as foras de acelerao devem ser mximas. Durante o movi-
mento ascendente estas foras diminuem (desaceleram) at zero, quando o pisto alcana ocurso mximo e pra momentaneamente para iniciar o ciclo de descida. No curso descendente
acontece o efeito oposto, as foras de acelerao vo aumentando durante a descida, at que o
pisto retorna ao ponto inicial.
Vibrao das Hastes:
Um efeito que dificulta a interpretao das cartas de superfcie a introduo de harmnicas de
amortecimento na coluna de hastes devido a variaes bruscas de carga nas hastes (situaes depancada de fluido ou at mesmo o carregamento da bomba durante o ciclo de subida do pisto).Resultado disso uma oscilao das tenses na coluna de hastes que no so bem representadas
na carta de superfcie.
2.1.1 Pancada de Fluido
Um fenmeno do processo com incidncia sobre a produo e os custos com manuteno a
pancada de fluido. Esta pancada ocorre quando o nvel no anular insuficiente para o enchimento total
da cmara do pisto durante o ciclo de subida, em A na Figura 2.2. Em uma situao normal, no incio
do ciclo descendente, a vlvula de passeio abre-se ao encontrar a cmara cheia de fluido, cuja pressopermite um descarregamento suave da bomba. Porm, dado que a cmara no foi completamente
preenchida, o pisto depara-se com uma coluna de gs, em B, cuja baixa presso no suficientepara a abertura da vlvula de passeio. Conforme o avano do pisto, em algum momento, o mesmo
encontrar a coluna de fluido no interior da cmara repentinamente, em C, o que causar uma brusca
transferncia da carga, e por conseguinte, um forte golpe mecnico sobre os componentes da bomba
de fundo.
A pancada acelera o processo de desgaste mecnico sobre os equipamentos do sistema, uma
situao limite seria a parada do poo para interveno com sonda para reparo e/ou troca dos equipa-
-
2.2. Carta Dinamomtrica de Fundo 17
PancadadeFluido
A B C
Figura 2.2: Representao grfica do fenmeno da pancada de fluido
mentos danificados. Alm da perda de produo associada ao enchimento parcial da cmara da bomba
de fundo.
2.2 Carta Dinamomtrica de Fundo
As cartas dinamomtricas de fundo constituem uma importante ferramenta para a anlise e
avaliao das condies do bombeio mecnico, nela esto representados os efeitos gerados pela carga
atuante na bomba de fundo durante um ciclo de bombeio que so registrados na superfcie, atravs
de modelos matemticos, possvel inferir o comportamento no fundo do poo mediante os dados
de superfcie. A carta de superfcie um traado da carga vs deslocamento (ambos referenciados haste polida), e nela no descreve-se o que efetivamente ocorre na parte inferior da bomba umavez que perturbaes e alteraes devido propagao dos fenmenos atravs do conjunto de hastesso incorporadas [Filho, 1993]. Entretanto, com a utilizao de alguns modelos matemticos para adinmica da coluna de hastes, possvel elaborar a carta dinamomtrica de fundo, que efetivamente,
auxilia no monitoramento da produtividade do poo e no diagnstico de problemas na operao de
bombeio. Na Figura 2.3 apresentado o comportamento das vlvulas de p e passeio durante um
ciclo de bombeio, e por definio:
Ps = Presso de Suco da Bomba (presso devido coluna de fluido no anular somada apresso devido a coluna de gs e presso na superfcie);
Pc = Presso da Cmara da Bomba de Fundo;
-
2. Elevao Artificial por Bombeio Mecnico 18
Pd = Presso de Descarga (presso devido a coluna hidrosttica da coluna de hastes somada apresso na superfcie).
Ps
Pd
Pc
Ps Ps Ps Ps Ps
PcPc
PcPcPc
Pd
Pd
PdPd
Pd
Figura 2.3: Ciclo de bombeio
Na Figura 2.4 exemplificada a gerao da carta de fundo destacando-se as foras atuantes na
bomba de fundo.
EmA, o movimento ascendente encontra-se na sua iminncia. A vlvula de passeio est aberta,
e portanto a diferena entre Pd e Pc nula, j que o fluido da cmara do pisto est em contato com acoluna de fluido. Todo o peso da coluna hidrosttica est depositado sobre a vlvula de p, e tem-se:
Pd = Pc >> Ps. Quando o pisto inicia o seu curso, o volume da cmara expande-se fazendo comque Pc diminua, e tem-se: Pd > Pc >> Ps, mesmo com o decrscimo de Pc, a contra presso que
Ps faz sobre a vlvula de p ainda no suficiente para abri-la. A diferena entre Pd e Pc aumenta
conforme o pisto continua com o seu movimento ascendente.
Em B, a contra presso exercida por Ps j suficiente para abrir a vlvula de p com umamxima diferena entre Pd e Pc, e tem-se: Pd >> Pc = Ps. Existe fluxo para o interior da cmara a
partir do momento em que Pc < Ps. O pisto sobe at seu curso mximo, em C, onde o fluxo atravs
da vlvula de p cessa e a esfera aloja-se devido a presso exercida sobre ela. A presena de gs podereduzir o curso til do pisto dado o carter de expanso do gs.
Em D, o pisto desloca-se na descendente reduzindo assim, o volume entre as vlvulas de p
e passeio, o que provoca o aumento de Pc em relao a Pd. Conforme o curso descendente do pisto,
-
2.2. Carta Dinamomtrica de Fundo 19
Pd-Pc
Pd-Ps
0
cursodopisto
Pd-Pc
Pd-Ps
0
cursodopisto
Pd-Pc
Pd-Ps
0
cursodopisto
Pd-Pc
Pd-Ps
0
cursodopisto
Pd-Pc
Pd-Ps
0
cursodopisto
A
B
E
D
C
Figura 2.4: Carta dinamomtrica de fundo
Pc torna-se maior que Pd, e existe fluxo de fluido atravs da cmara do pisto para a coluna. Neste
momento tem-se: Pd < Pc >> Ps. Finalmente em E, cessa o fluxo atravs da vlvula de passeio, e
a esfera aloja-se na sede devido a presso exercida sobre a mesma.
No traado da Figura 2.4 mostrado uma carta dinamomtrica com enchimento completo,
pode-se afirmar que um funcionamento anormal da bomba de fundo (vazamentos nas vlvulas de pou passeio, pisto preso, pancada de fluido, entre outros problemas) ocasionar um traado diferentedo mostrado na Figura 2.4 e ser identificado. Na literatura, este enchimento completo da bomba
denominado por carta cheia.
Carta Dinamomtrica de Fundo para a Pancada de Fluido
Na figura 2.5 mostrada a carta de fundo, a qual caracteriza a pancada de fluido. No ponto P ociclo de descida iniciado. Neste momento, a vlvula de passeio deveria abrir pela presso da coluna
hidrosttica que se encontra abaixo dela, transferindo a carga da coluna de hastes para a vlvula de
p. Porm, como a vlvula encontra uma regio de baixa presso, ela no consegue abrir, e parte do
-
2. Elevao Artificial por Bombeio Mecnico 20
ciclo de descida feito com a vlvula de passeio fechada, j que a presso exercida pelo gs dentroda cmara no suficiente para abri-la. Quando a vlvula de passeio encontra a coluna de fluido,ela abre provocando um aumento da presso Pc (transferncia de carga da vlvula de passeio para avlvula de p), entretanto neste momento o pisto j sofreu um deslocamento.
MPT
EPT
PontoP
Cursodopistoperdido
Figura 2.5: Carta dinamomtrica de fundo associada pancada de fluido
A Figura 2.5 permite concluir que a pancada no s provoca um prejuzo na produo de leo,j que este fenmeno diminui o curso efetivo do pisto, como tambm existe uma relao indiretaentre intensidade da pancada e enchimento da bomba, quanto menor for este, o percurso do pisto
sem encontrar o fluido ser maior, e conseqentemente a acelerao do pisto no instante do impacto
com o fluido no interior da cmara ser maior, o que ocasionar certamente um maior desgaste dos
componentes da bomba de fundo.
2.3 Modelagem e Simulador do Bombeio Mecnico
A modelagem do sistema foi desenvolvida com o principal objetivo de simular os algoritmosde controle sugeridos para o processo de elevao artificial por bombeio mecnico. Como resultado
deste estudo sobre o sistema, um simulador que representa a evoluo das principais variveis de
interesse foi desenvolvido.
No simulador esto representados os fenmenos fsicos mais importantes que caracterizam o
sistema de bombeio mecnico, dentre os quais destacam-se o efeito do nvel do anular sobre a vazo
do canhoneado (reservatrio), o fenmeno de alongamento do conjunto de hastes e a dinmica dofluido. Um importante aspecto simulado que interessa principalmente s estratgias de controle o
efeito da pancada de fluido por conseqncia do baixo nvel no anular.
Ressalta-se que muitos modelos simplificados so utilizados com intuito de um baixo custo
computacional devido a necessidade de uma simulao em escala de tempo real para acoplar o si-
mulador ao algoritmo de controle alocado no CLP (Controlador Lgico Programvel) localizado em
-
2.3. Modelagem e Simulador do Bombeio Mecnico 21
uma unidade remota junto ao poo de produo. O simulador implementado no ambiente simulinkdo Matlab c.
Os modelos apresentados a seguir foram discutidos durante a pesquisa sobre o bombeio mecnico,
e tambm em visita tcnica, em conjunto com a Petrobras, em alguns blocos existem significativascolaboraes por parte da equipe de engenheiros da Petrobras.
2.3.1 Descrio do Simulador
O simulador representa a evoluo das principais variveis de interesse no processo de bombeio,
so elas a presso de fundo, nvel do anular, posio da haste, vazo do canhoneado, conforme apre-
sentado na Figura 2.9. A descrio do modelo dividida em vrios blocos com funcionalidades eequacionamentos diferentes, so eles:
1. Bloco Motor;
2. Bloco Coluna de Hastes Flexveis;
3. Bloco Vlvulas de P e Passeio;
4. Bloco Vazo de Formao;
5. Bloco Balano de Materiais;
6. Bloco Estimao do Nvel atravs da Pwf .
Na Figura 2.6 mostrado um diagrama de blocos sobre a implementao do simulador atravs
de blocos funcionais, e pode-se analisar melhor a dependncia que existe entre as variveis do pro-
cesso.
Vlvulas dePePasseio
VazodeFormao
Motor
CPMVelocidade
Controle
BalanodeMateriais
Vazo Total
VazoProduzidaPwfNvelnoAnular
Presso AtuantenaBomba
ConjuntodeHastes
PressodePasseio
PosiodeFundo
Vlvulas
Reservatrio
VelocidadedeFundo Posio
Figura 2.6: Diagrama de blocos para o simulador de bombeio mecnico
-
2. Elevao Artificial por Bombeio Mecnico 22
1. Bloco Motor:
O movimento do conjunto de hastes aproximado com uma funo senoidal de amplitudedefinida pelo usurio e freqncia definida pela entrada CPM. Esta amplitude est associada
ao curso efetivo do pisto, que pode ser modificado mecanicamente na superfcie da unidade.
Existem vrios tamanhos para as UBs, dependendo da unidade, existem geralmente de 3 a 5posies fixas para esta variao do curso do pisto. Assim o equacionamento fica como a
seguir:
= CPM
30(2.1a)
x = A sin(t) (2.1b)
v = A cos(t) (2.1c)
a = A2 sin(t) (2.1d)
nos quais, [rad/s] a freqncia do motor, A [m] amplitude que est relacionada ao curso
do pisto, x [m] a posio da haste, v [m/s] a velocidade da haste e a [m/s2] a acelerao
da haste, estes ltimos trs dados referem-se haste polida. Observa-se que dada uma troca
de CPM na entrada obtm-se uma descontinuidade de velocidade e acelerao na sada, ainda
assim, considera-se este modelo razovel pois supe-se a dinmica do motor muito mais rpida
que as demais dinmicas envolvidas no sistema.
2. Bloco Coluna de Hastes Flexveis:
O modelo que descreve o conjunto das hastes est baseado em um modelo massa-mola-amortecedorproposto em Snyder e Bossert [1963], vide Figura 2.7.
A coluna total de hastes est subdividida em 10 sees (este nmero de sees apresenta umcomportamento aceitvel do conjunto de hastes associado a um baixo custo computacional paraa simulao dos algoritmos de controle), na qual cada uma admite um modelo com uma massaM [kg], uma constante elstica da mola K [N/m] e um amortecimento B [Ns/m]. A fora
em cada seo causada pelo deslocamento relativo das sees adjacentes, e tambm peloamortecimento. O equacionamento resultante mostrado abaixo:
-
2.3. Modelagem e Simulador do Bombeio Mecnico 23
M
2K
2K
2K
M
2K
M
2K
2K
M
2K
2K
2K
M
2K
L/10
L/10
L/10
L/10
L/10
u 0
u 1
u 2
u 3
u 9
u 10
F
Figura 2.7: Sistema massa-mola-amortecedor para modelagem da coluna de hastes
K(u0 u1)K(u1 u2)Bu1 = Mu1
K(u1 u2)K(u2 u3)Bu2 = Mu2
.
.
.[...]
K(u9 u10) F (t)Bu10 = Mu10
(2.2)
no qual u [m] o deslocamento da seo da haste. A massa M tem 1/10 do peso total da coluna
de hastes, e cada mola tem uma constate elstica 2K, igual a 20 vezes o total da constante
elstica do conjunto das hastes.
3. Bloco Vlvulas de P e Passeio:
Neste bloco est representada a vazo de sada dos canhoneados (reservatrio) como conse-qncia do movimento das hastes, a diferena de presso na vlvula de passeio e o efeito da
-
2. Elevao Artificial por Bombeio Mecnico 24
presena de gs na cmara do pisto, reproduzindo assim, o efeito da pancada de fluido. O
equacionamento dividido em duas situaes, um primeiro instante que o ciclo de subida, e
conseqentemente, um segundo instante para o ciclo de descida.
Haste com Movimento Ascendente: Admite-se que a vlvula de p est aberta e existe
fluxo de fluido para o interior da cmara, e ainda, nesta situao a vlvula de passeio
permanece sempre fechada. Quando apenas encontra-se gua e leo no fluido considera-se que a vazo para a cmara dada pela equao:
qfluido = Spistao vpistao (2.3)
no qual, qfluido [m3/s] a vazo de fluido, Spistao [m2] a seo do pisto e vpistao [m/s]
a velocidade do mesmo. Com isto supe-se que o fluido vai preenchendo o vazio que o
pisto deixa no interior da cmara. Em um segundo caso, quando existe gs adicionado ao
fluido, tambm considera-se que a vazo de gs proporcional ao movimento do pisto,
obedecendo a lei dos gases ideais, indicada no equacionamento abaixo:
qgas =Prev Spistao vpistao
R T(2.4)
no qual, qgas [mol/s] o fluxo da gs, Prev [N/m2] a presso do gs existente sobre o
nvel do anular, T [K] a temperatura mdia do gs e R a constante dos gases perfeitos.
Ainda foi modelada uma situao intermediria, quando coexistem leo, gua e gs na
suco da bomba de fundo, com o intuito de modelar o comportamento da suco de
fluido quando o nvel do anular se aproxima do nvel de suco da bomba, j que observa-se um chaveamento entre as equaes (2.3) e (2.4) que produz fortes descontinuidadesnas vazes dos fluidos. Sejam as equaes:
qfluido = Spistao vpistao (2.5a)
qgas = (1 ) Prev Spistao vpistao
R T(2.5b)
=hanular (hsb )
2 (2.5c)
-
2.3. Modelagem e Simulador do Bombeio Mecnico 25
nas quais, hanular [m] nvel de fluido no anular, hsb [m] o nvel de suco da bomba,
e so constantes de ajuste. A equao (2.5c) aproxima com uma reta a descontinuidadena vazo dos fluidos, que atravs de determina quando o ajuste tem efeito e qual sero efeito de cada vazo. A varivel tipicamente pequena e pode-se associ-la regio
em torno da suco da bomba.
A partir das situaes expostas anteriormente, a vazo produzida pela UB calculada a
partir do seguinte equacionamento:
QUB = qfluido (2.6)
no qual, a eficincia volumtrica da bomba de fundo. Esta eficincia sempre menor
que 1, devido ao vazamento de lquido em volta do pisto, a compressibilidade do fluido
e ao incompleto enchimento da cmara do pisto com o lquido da coluna do anular, este
ltimo fator tratado no trabalho mediante a varivel qfluido. A eficincia volumtrica
definida em 0, 85 para as simulaes dos algoritmos de controle.
Haste com Movimento Descendente: Admite-se que a vlvula de p est fechada e o
estado da vlvula de passeio depende da diferena de presso sobre ela. Quando na c-mara encontra-se gs, este acumula-se no topo, j que tem densidade menor. Conforme avlvula de passeio desce, estando ela inicialmente fechada, o gs comprimido segundo a
relao clssica dos gases perfeitos. Existe a compresso, at que a presso do gs iguala
a presso da coluna de leo acima da vlvula de passeio, esta permanece fechada e quando
abre supe-se que o gs inicia a fluir pela vlvula de passeio com uma presso constante
igual coluna de leo, como apresentado abaixo:
n
t=
P
RTV
t(2.7)
no qual, dn/dt [mol/s] a vazo mssica de gs, V [m3] o volume que o gs ocupa na
cmara do pisto e P a presso hidrosttica da coluna de leo. O gs flui at que a
vlvula de passeio chega a altura em que tem leo na cmara, momento em que acontece
a pancada de fluido e o leo comea a escoar segundo a seguinte relao:
qoleo = Spistao vpistao (2.8)
na qual, qoleo [m3/s] a vazo de leo.
4. Bloco Vazo de Formao:
-
2. Elevao Artificial por Bombeio Mecnico 26
No modelo admite-se que a dinmica do reservatrio est relacionada com a dinmica das
hastes atravs da presso de fundo. A vazo de produo devido ao movimento das hastes
diminui o nvel do anular (e tambm Pwf ), e com esta presso de fundo menor consegue-seum maior fluxo de fluido atravs da formao para o revestimento. A capacidade de produo
do reservatrio implementada atravs do modelo linear, que est relacionado ao ndice de
produtividade do poo (IP ), dado por:
IP =q
Pestatica Pwf(2.9)
na qual, q [m/s2] a vazo do reservatrio e Pestatica [Pa] a presso esttica do reservatrio.
A equao (2.9) representa uma curva conhecida como IPR (Inflow Performance Relationship)na qual a vazo varia linearmente com a presso de fundo, e na Figura 2.8 mostrada a curva
de IPR para este modelo linear.
IPR
P[P
a]
-P
ress
o
de
Flu
xow
f
Q[m/dia]3
Figura 2.8: Curva de IPR para o modelo linear
O poo considerado possui trs zonas produtoras que compartilham a mesma coluna de pro-
duo, porm com vlvulas independentes (vide Figura 2.9). Assim, a vazo dada pela zonaprodutora inferior influencia na presso das zonas de produo superiores, por meio da perda
de carga gerada. importante uma boa modelagem da perda de carga por atrito, j que estainfluencia diretamente na leitura dos sensores com os quais ser feita a estimao do nvel do
anular. A presso na suco, Psb [Pa], da bomba obtida pela equao:
Psb = Prev + gas g N + liq g (LN) (2.10)
na qual, Prev [Pa] a presso do revestimento, g [m/s2] acelerao da gravidade, gase liq so as massas especficas do gs e lquido respectivamente. As presses de fluxo de
fundo (Pwf ) so dadas pelas seguintes equaes, referentes s zonas de produo A, B e C,
-
2.3. Modelagem e Simulador do Bombeio Mecnico 27
respectivamente.
PwfA = Psb + fluido g (LvA L) + PatA
PwfB = PwfA + fluido g (LvB LvA) + PatB
PwfC = PwfB + fluido g (LvC LvB ) + PatC
(2.11)
Nas equaes acima tem-se que os Pat [Pa] so perdas de carga calculadas por correlaes de
escoamento multifsico e f obtido de forma simplificada pela mdia das massas especficas
do fluido e do gs ponderadas pela razo gs-lquido, como a seguir:
fluido =1
1 +RGL liq +
RGL
1 +RGL gas (2.12)
Sendo liq apenas gua, pode-se ento obter RGL a partir da RGO e do BSW pela equao
abaixo:
RGL = RGO
(1
BSW
100
)(2.13)
Sobre os modelos assumidos para a perda de carga por atrito (Patrito), descreve-se a continu-ao a equao que relaciona a perda de carga por atrito, levando em considerao as caracters-
ticas geomtricas do poo e as propriedades da mistura dos fluidos. Seja o modelo homogneo:
P
h= 2 Cf fluido
j2
D(2.14)
no qual, D [m] o dimetro do tubo de produo, fluido massa especfica do fluido, Cf o
fator de atrito segundo o modelo de Wood e ser calculado a continuao, e j a velocidade
de escoamento do fluido. Integrando a equao (2.14) no trecho de altura onde se tem o fluxo,resulta-se em:
P = 2 Cf fluido j2
DH (2.15)
na qual j [m/s] definido como:
j =ql (1 +RGL)
Acoluna(2.16)
-
2. Elevao Artificial por Bombeio Mecnico 28
em que ql [m3/s] a vazo de escoamento do lquido pela coluna de produo e Acoluna [m2]
a seo da coluna de produo. O modelo de Wood para o fator de atrito apresentado abaixo:
Cf = a+ b (Re)c (2.17)
Esta equao tende a superestimar o fator de atrito em aproximadamente 5%, comparando com
o grfico de Moody. Porm, como a coluna sofre corroso, deposio, entre outras coisas,
esta correlao atende satisfatoriamente as necessidades de equacionamento. Com a, b, c, Re
(Nmero de Reynolds) e (Viscosidade da Mistura) definidos respectivamente abaixo:
a = 0, 0235 (
D)0,225 + 0, 1325 (
D)
b = 22 (
D)0.44
c = 1, 62 (
D)0.134
Re =fluido j D
=
(1 BSW100
)oleo +
BSW100 (H20) +RGL gas
1 +RGL
(2.18)
nos quais, D [m2] o dimetro do tubo de produo, fluido a massa especfica do fluido e oleo,
(H20) e gas so as viscosidades de leo, gua e gs contidas no fluido, respectivamente. O
modelo de Wood assumido para a perda de carga por atrito e respectivas variveis envolvidas
est baseado em Saleh [2002].
5. Bloco Balano de Materiais:
Este bloco responsvel pelo balanceamento de materiais, onde a diferena entre a vazo total
(vazo que flui do reservatrio para o anular) e a vazo produzida (vazo que flui do anular paraa coluna de produo) o incremento que ocorre na altura do anular, respeitando portanto, umbalano de massa. Esta relao equacionada como abaixo:
dh
dt=qtotal qproduzida
Aanular(2.19)
E o nvel h [m] a diferena entre H [m] (profundidade do poo) e N [m] (profundidade donvel no anular estimado), conforme a Figura 2.9.
6. Estimao do nvel do anular atravs da Pwf
-
2.3. Modelagem e Simulador do Bombeio Mecnico 29
PwfA
PwfC
PwfB
Pwf
Movimento daBomba
N-Nvel do Anular
L -634,3m(SucodaBomba)
Sensor -653,3mVlvula -656,1m
Sensor -674,6mVlvula -677,2m
Sensor -690,7mVlvula -693,4m
Zona A -653,2a670,3m
ZonaC-691,0a709,5m
ZonaB-673,5a684,0m
H-645,8m(Sensor EA)
Nvel deReferncia
VlvuladePasseio
VlvuladeP
Pisto
H =650mrev
Figura 2.9: Esquema do poo de produo GeDIg CP-1316
-
2. Elevao Artificial por Bombeio Mecnico 30
Para uma proposta de controle dinmico do nvel do anular definem-se correlaes entre a
presso de fundo (Pwf ) e o nvel do anular. Esta utilizao da presso de fundo o grandediferencial em relao aos outros mtodos de controle no bombeio mecnico, e o maior em-
pecilho para a estimao do nvel atravs da Pwf a definio da composio do fluido que se
encontra no anular (partes de gua, leo e gs no fluido).Assim, de forma geral escreve-se a correlao entre Pwf e nvel do anular como a seguir, com
base na Figura 2.9.
Pwf = Prev + gas g N + liq g (H N) (2.20)
Existem vrias possibilidades para a composio do fluido. Uma primeira hiptese mais sim-
plista, considera a massa especfica do lquido como uma mdia entre as massas especficas
do leo e da gua, ponderada pelo BSW, como na equao (2.21). Vide primeira hiptese daFigura 2.10. Assim, o liq em (2.20) definido como abaixo:
liq =
(1
BSW
100
) oleo +
BSW
100 H2O (2.21)
na qual, oleo e H2O so as massas especficas do leo e gua, respectivamente. Porm, uma
melhor hiptese considerar a segregao gravitacional, admitindo que acima da suco da
bomba encontra-se apenas leo, e que o espao entre a suco da bomba e o sensor de presso
est preenchido com uma mistura entre gua e leo. A relao apresentada abaixo:
Pwf = Prev + gas g N + oleo g (LN) + (H2O+oleo) g (H L) (2.22)
Na Figura 2.10 mostrada graficamente esta hiptese que considera a segregao gravitacional.
Ressalta-se que embora no mostrado, considera-se a presena de gs no fluido no anular.
A correlao proposta em (2.22) ser utilizada nas simulaes dos algoritmos de controle.Nota-se que Pwf e a profundidade do anular (N ) so indiretamente proporcionais e sabe-seque a preocupao principal no controle o ponto mnimo do nvel no anular que pode oca-
sionar, ou no, a pancada de fluido. Isolando a varivel N em (2.22) tem-se:
N =Pwf Prev oleo g L (H2O+oleo) g (H L)
g(gas oleo)(2.23)
Ainda, com relao influncia da estimao do nvel no controle dinmico do nvel no an-
ular, neste trabalho sero utilizadas as quatro informaes de presso de fundo dos sensores
-
2.3. Modelagem e Simulador do Bombeio Mecnico 31
N-Nvel do Anular
L -SucodaBomba
leo
leo+gua
SensordePressodeFundo
SensordePressodeFundo
leo+gua
Figura 2.10: Hipteses de composio do fluido no anular do poo
disponveis nos poos do GeDIg, com o intuito de tirar a dependncia total do sensor denomi-
nado Elevao Artificial, evitando problemas caso ocorra uma falha com este sensor. Assim,as quatro estimativas de nveis so dadas a seguir, utilizando os sensores de elevao artificial,
topo (Zona A), meio (Zona B) e fundo (Zona C), respectivamente. As variveis indicadas nasequaes seguintes so definidas na Figura 2.9.
N =Pwf Prev oleo g L liq g (H L)
g(gas oleo)(2.24)
Ntopo =PwfA Prev oleo g L fluido g (LvalA L)PatA
g(gas oleo)(2.25)
Nmeio =PwfB Prev oleo g L fluido g (LvalB L)PatA PatB
g(gas oleo)(2.26)
Nfundo =PwfB Prev oleo g L fluido g (LvalC L)PatA PatB PatC
g(gas oleo)(2.27)
Com estas quatro informaes de nvel correspondentes a cada um dos sensores de fundo,
-
2. Elevao Artificial por Bombeio Mecnico 32
realiza-se uma mdia geomtrica entre estas medies, conforme equacionamento abaixo:
Nmedia = (NEA Ntopo Nmeio Nfundo)1/4 (2.28)
Com o resultado desta mdia (Nmedia) faz-se uma avaliao para detectar a informao maisafastada da mdia geomtrica, e portanto, descart-la. Logo, faz-se uma mdia aritmtica entre
as trs informaes restantes para a estimao final do nvel do anular. A varivel Nmediarepresenta a profundidade estimada de nvel no anular, para obter o nvel em relao ao fundo
do poo, faz-se:
h = H Nmedia (2.29)
no qual, h [m] o nvel de fluido referenciado ao fundo do poo e H [m] o fundo de poo
de produo. Todos os algoritmos de controle propostos utilizaro este resultado final para o
controle dinmico do nvel no anular.
2.3.2 Dados do Poo de Produo
O poo utilizado para o desenvolvimento do simulador o poo CP-1316 localizado no campode produo de Carmpolis (SE), ressaltando que um poo diferenciado por estar conectado a trszonas produtoras atravs de vlvulas on/off localizadas na coluna de produo e operadas hidrauli-camente. Cada intervalo de produo est isolado atravs de packers, e a cada um destes intervalos
conta com medies de presso e temperatura atravs de sensores de fibra ptica. Acima do packer
de produo tambm h informao sobre a presso e temperatura com a utilizao de um sensor com
mesma tecnologia de fibra ptica.
Os dados sobre o poo de produo esto divididos em revestimento e UB, e propriedades do
fluido, e so mostrados a seguir.
Revestimento e UB:
- O revestimento o 5 1/2 [pol] 15, 5 [lb/pe]. Segundo dados da tabela padronizada de reves-
timento, tem-se que o dimetro interno 4, 95 [pol].
- Dimetro nominal da coluna de produo, dcoluna = 2 7/8 [pol].
- Dimetro interno da camisa da bomba, dbomba = 2 [pol].
-
2.3. Modelagem e Simulador do Bombeio Mecnico 33
- Presso do revestimento, Prev = 1, 83 [kgf/cm2].
- Curso da haste polida, S = 62 [pol].
- Profundidade da suco da bomba, L = 634, 3 [m].
- Profundidade do sensor de elevao artificial, H = 645, 8 [m].
- Profundidade do revestimento, Hrev = 650 [m].
Propriedades dos Fluidos:
- doleo = 0, 902 oleo = 902 [kg/m3].
- dgas = 0, 620 gas = 0, 744 [kg/m3] (condies padro).
- dH2O = 1, 000 H2O = 1000 [kg/m3].
- BSW = 88,2%.
- RGO = 85 [Sm3/m3].
Condies do Reservatrio:
- Presso esttica da zona A, Prev = 5, 225171 105 [Pa].
- Presso esttica da zona B, Prev = 6, 807996 105 [Pa].
- Presso esttica da zona C, Prev = 15, 132493 105 [Pa].
- ndice de produtividade da zona A, IPA = 0, 3114935[m3
dia Pa].
- ndice de produtividade da zona B, IPB = 1, 103638 105[m3
dia Pa].
- ndice de produtividade da zona C, IPC = 1, 937927 105[m3
dia Pa].
2.3.3 Curvas de Resposta do Simulador
Nesta subseo so apresentadas as evolues das principais variveis envolvidas no processo
de elevao artificial por bombeio mecnico, e simuladas utilizando os modelos fenomenolgicos des-
critos anteriormente. Para simular o processo utilizada uma plataforma de trabalho que conta com
o simulador proposto neste captulo implementado no ambiente Simulink do MatLab e os algoritmos
de controle sero implementados em um CLP ZAP 900 (fabricado pela HI Tecnologia, a utilizaodeste CLP sugesto da Petrobras por se tratar de CLP encontrado nos poos de produo da prpria
Petrobras, isso indica um cenrio mais real nas simulaes dos algoritmos de controle). A tecnologiaOPC faz toda a comunicao entre os componentes do processo. Na Figura 2.11 apresentada a
plataforma de trabalho.
-
2. Elevao Artificial por Bombeio Mecnico 34
ServidorOPC
CLP
(AlgoritmosdeControle)
SIMULADOR(ProcessodeBombeioMecnico)
Pwf Pwf CPMCPM
Figura 2.11: Plataforma de trabalho
Na Figura 2.12 apresentado o comportamento do nvel no anular em uma situao que a UB
est desligada, este teste importante porque indica qual o nvel de equilbrio do anular no qual a
contra presso exercida pela coluna de lquido se iguala com a presso do reservatrio, e assim, no
h vazo de formao atravs dos canhoneados.
0 5000 10000 15000 20000 25000 30000 35000 400000
20
40
60
80
100
120
140
160
180
Tempo[s]
Nv
eln
oa
nu
lar
[m]
168,31
Figura 2.12: Ensaio sobre o nvel de equilbrio do anular
O comportamento da vazo de formao mostrado na Figura 2.13, na qual a vazo de for-
mao mxima quando o nvel do anular se encontra na suco da bomba, e portanto, o ponto
mximo de operao para explorao do reservatrio.
0 500 1000 1500 2000 2500 3000 3500 40000
5
10
15
20
25
30
35
Tempo[s]
Vaz
od
eF
orm
a
o[m
/d
ia]
3 26,35
Figura 2.13: Ensaio sobre o potencial da vazo de formao do reservatrio
Outras curvas de resposta do simulador so obtidas mediante um ensaio em malha aberta onde a
velocidade de bombeio variada conforme a Figura 2.16. Nas Figuras 2.14 e 2.15 os comportamentosdo conjunto de hastes e da presso de fundo so mostrados, respectivamente.
-
2.3. Modelagem e Simulador do Bombeio Mecnico 35
Posiode Topo
PosiodeFundo
CPM
Figura 2.14: Comportamento dinmico da coluna de hastes
O efeito do alongamento pode ser verificado no atraso entre o movimento no topo da haste
polida (superfcie) e no pisto (fundo). No incio do movimento ascendente no topo da haste po-lida existe primeiramente um alongamento no conjunto de hastes, e s ento, inicia-se o movimentoascendente do pisto. No movimento descendente existe um comportamento anlogo, vide Figura
2.14. Ainda sobre a dinmica das hastes, pode-se constatar que conforme aumenta-se a velocidade de
bombeio, o curso til do pisto diminui, isto ocorre dado a caractersticas de flexibilidade do conjuntode hastes, o que d um comportamento no linear ao sistema de bombeio mecnico. Outro efeito que
contribui com esse comportamento a inrcia do movimento, que causa um sobre-deslocamento ao
curso do pisto.
Na Figura 2.15 mostrado o comportamento da presso de fundo em um ensaio em malhaaberta. O sistema apresenta uma oscilao das hastes que trasmitida para a presso de fundo, dados
os sucessivos ciclos de bombeio. Na Figura 2.16 mostrado o comportamento da velocidade debombeio, que a varivel manipulada em malha aberta neste ensaio para obteno das curvas de
resposta do simulador.
Outros comportamentos interessantes para anlise do simulador so as relaes que existem
entre a evoluo do nvel no anular conforme altera-se a velocidade de, e tambm como comporta-se
a vazo que flui do reservatrio para o anular do poo de produo atravs dos canhoneados. Estes
comportamentos so mostrados nas Figuras 2.17 e 2.18, respectivamente.
Existe um comportamento anlogo entre as evolues de presso de fundo e nvel do anular. J
com relao ao comportamento da vazo atravs dos canhoneados, conclui-se que existe uma relao
inversamente proporcional com relao presso de fundo, por isso, nas estratgias de controle existe
-
2. Elevao Artificial por Bombeio Mecnico 36
0 2000 4000 6000 8000 10000 12000 140000,976
1,043
1,111
1,178
1,245
Tempo[s]
Pre
ss
od
eF
un
do
Figura 2.15: Evoluo da presso de fundo em malha aberta
0 2000 4000 6000 8000 10000 12000 140006
7
8
9
10
11
Tempo [s]
Ev
olu
o d
o CP
M
Figura 2.16: Evoluo da velocidade de bombeio em malha aberta
o objetivo de trabalhar-se com a menor presso de fundo possvel para maximizar a vazo atravs doscanhoneados. Ressalta-se que o mesmo comportamento oscilatrio que a presso de fundo apre-
senta, e mostrado na Figura 2.15, tambm ocorre sobre as variveis do nvel no anular e vazo doscanhoneados.
As curvas de resposta do simulador correspondem a uma boa aproximao do cenrio encon-
trado em um poo de produo para a evoluo das principais variveis do processo, e portanto, o
simulador cumpre seu papel para a avaliao dos controladores para as unidades de bombeio. Uma
etapa crucial para validao seria corroborar os dados com os de uma matriz de testes no poo de
produo para analisar os dados, e propor possveis mudanas na modelagem do processo.
0 2000 4000 6000 8000 10000 12000 1400015
16
17
18
19
20
21
22
23
24
Tempo[s]
Nv
eln
oA
nu
lar
[m]
Figura 2.17: Evoluo do nvel do anular em malha aberta
-
2.4. Concluso 37
0 2000 4000 6000 8000 10000 12000 1400025
25.5
26
26.5
27
27.5
28
Tempo[s]
Va
zo
de
Fo
rma
o
[m
3/s
]
Figura 2.18: Evoluo da vazo de formao em malha aberta
2.4 Concluso
Neste captulo apresentou-se um simulador que atravs de um modelo fenomenolgico con-
segue reproduzir a evoluo das principais variveis do processo, e portanto, cumpre seu objetivoprincipal de desenvolvimento que o teste de algoritmos de controle utilizando a presso de fundo. possvel a partir desta base construda, propor a incorporao de modelos matemticos mais especfi-
cos como a modelagem da dinmica do motor principal, um modelo mais completo para a coluna de
hastes e reservatrio, e assim, ter o objetivo principal de desenvolver um simulador completo para obombeio mecnico.
Uma matriz de testes no campo de produo essencial para a validao dos dados reproduzi-
dos pelo simulador e tambm de alguns modelos assumidos, por exemplo, a utilizao do modelo
linear para a curva IPR, que relaciona a vazo de formao e a presso de fundo.
A simulao dos algoritmos propostos realizada sobre uma plataforma de trabalho constituda
pelo prprio simulador e um CLP, dispositivo usado para a implementao dos algoritmos de controle.
A utilizao desta plataforma torna este processo inicial de testes mais compatvel com as condies
que se encontram nos campos de produo.
-
2. Elevao Artificial por Bombeio Mecnico 38
-
Captulo 3
Operao de Poo com BombeioMecnico
A operao e anlise do sistema de bombeio mecnico conta com uma importante e conso-
lidada ferramenta para avaliao do comportamento da bomba de fundo denominada por carta di-
namomtrica de fundo, conforme explicado no captulo anterior. As estratgias pump-off e VSD soapresentadas sob o contexto da carta dinamomtrica de fundo e para tal, define-se uma analogia entre
o reconhecimento do padro da carta e o enchimento da cmara da bomba de fundo para emular o
controle utilizando a carta de fundo.
3.1 Metodologias de Controle
Na indstria do petrleo duas metodologias de controle para operao dos sistemas de bombeio
mecnico tm ampla empregabilidade, na qual cada uma conta com caractersticas prprias. A grande
diferena entre elas que o controle VSD possibilita variar a velocidade de bombeio conforme exista
necessidade para tal, e por outro lado o controle pump-off trabalha apenas com dois estados de veloci-dade de bombeio, ligado ou desligado. A seguir so expostos os principais aspectos e caractersticas
que envolvem estes dois mtodos de controle para unidades de bombeio mecnico.
3.1.1 Estratgia de Controle Pump-Off
O pump-off um forma genrica de denominar os controles intermitentes sobre o sistema debombeio mecnico, esta estratgia est basicamente fundamentada em cinco mtodos [Westerman,
-
3. Operao de Poo com Bombeio Mecnico 40
1977]. Na literatura, destes cinco mtodos, os mais utilizados baseiam-se em sensores de vibrao,monitoramento da corrente do motor principal, e a carga atuante na bomba (dado adquirido atravsde um dinammetro, ou clula de carga, fixado haste polida). Um outro mtodo utilizar um sensorde fluxo, e pr-determinar momentos de parada do poo, atravs dos instantes de tempo em que no
existe um fluxo total [Neely e Tolbert, 1988], [Amezcua, 1980]. E por fim, existe a possibilidadede controlar o nvel do anular, e para tal, pode-se utilizar a presso de fundo como parmetro de
realimentao do controle.
Esta idia de controle intermitente baseia-se em garantir a menor presso de fundo possvel
ocasionando uma maior produo de fluido, j que a contra presso sobre os canhoneados menor.O objetivo principal levar o nvel do fluido at a suco da bomba no perodo final de operao. Omomento crtico ao analisar o nvel no anular e determinar o desligamento do poo quando a bomba
se encontra na iminncia do curso ascendente, j que um nvel insuficiente de fluido no anular dopoo ocasionar um enchimento parcial da bomba, o que certamente levar a uma pancada de fluido.
Um controle ideal, que possibilitaria controlar o nvel em uma determinada referncia exigiria
um chaveamento infinito do sinal de controle, o que em termos prticos no possvel. Assim, na
estratgia de controle pump-off se trabalha com o controle do nvel sobre uma faixa prxima ao nvelde referncia. Existem dois parmetros que devem ser ajustados conforme projeto e necessidade decontrole, so eles:
Velocidade da unidade de bombeio;