






Línguas
Páginas
Legal


1
IMPACTO DO CONTROLE DE POTÊNCIA ATIVA DE AEROGERADORES NO SUPORTE
À FREQUÊNCIA DO SISTEMA
João Gabriel Barbosa Fernandes
Orientador: Prof. Dr. Mauricio Campos Passaro Instituto de Sistemas Elétricos e Energia (ISEE)
Resumo – Diversos problemas têm surgido com o
aumento da penetração de energias renováveis no
sistema elétrico, um deles é a diminuição da inércia do
sistema, que leva a maiores excursões da frequência
após distúrbios na rede. O controle de potência ativa
presente em modernos modelos de aerogeradores
surgiu como uma solução para o problema. O presente
trabalho faz uma análise desse novo tipo de controle em
um sistema fictício, e mostra sua eficácia na
manutenção da frequência para configurações com
diferentes níveis de penetração eólica.
Palavras-Chave: Aerogeradores, Controle de Potência
Ativa, Excursões da Frequência, Inércia.
I – INTRODUÇÃO
O aumento da geração de energia elétrica, bem como o
desenvolvimento do setor elétrico brasileiro como um
todo, é vital para o crescimento econômico e social do pais.
Pensando nisso juntamente a preocupação com a
sustentabilidade de processos, levaram a um aumento
significativo do incentivo a geração de energia a partir de
fontes renováveis como, eólica, solar, das marés entre
outras.
Dentre essas a eólica vem despontando como a mais
promissora, por apresentar menores custos de implantação
e operação. Porém a intermitência dos ventos gera uma
série de problemas de qualidade de energia e operação
desses geradores, fazendo-se necessário o estudo de tal
tecnologia com a finalidade do melhor entendimento
desses problemas e proposição de soluções para os
mesmos [1].
Um dos problemas apresentados na operação de
aerogeradores é a sua característica dinâmica para
manutenção da frequência. Devido a intermitência dos
ventos a maioria das turbinas eólicas são de velocidade
variável, logo dispõem de dispositivos eletrônicos para se
conectarem à rede, desacoplando a parte mecânica das
turbinas da rede elétrica. Isto faz com que essas turbinas
não sejam sensíveis a variações na frequência do sistema
e, portanto, não gerem nenhum tipo de suporte a mesma.
Porém com o aumento significativo da participação da
geração eólica em sistemas elétricos de todo o mundo,
estão sendo desenvolvidos novos controladores capazes de
fazer com que a turbina eólica gere uma resposta tanto de
potência reativa como de potência ativa [2].
Neste trabalho será apresentado um estudo do impacto de
um controlador de potência ativa de aerogeradores na
restauração da frequência de um sistema após um grande
distúrbio.
II – REFERENCIAL TEÓRICO
A seguir será apresentado o referencial teórico no qual o
estudo é baseado, evidenciando os principais tipos de
tecnologias existentes para turbinas e geradores usados na
geração de energia eólica, e apresentando os conceitos de
estabilidade de frequência e controle de potência ativa.
II.1 – Tipos de Turbinas
As turbinas eólicas têm como papel converter a energia
cinética do vento em energia mecânica, os principais
elementos da turbina responsáveis por essa conversão são
as pás, eixos de baixa e alta velocidade, caixa de
engrenagens, cubo, gerador e torre de sustentação da
turbina. Como mostrado na figura 1.
II.1.1 – Turbinas de Velocidade Fixa
Turbinas de velocidade fixa são assim chamadas pois
independente da velocidade do vento elas operam a uma
velocidade constante determinada pela frequência do
sistema ao qual são conectadas, caixa de engrenagens e
gerador utilizado. Normalmente são equipadas com um
TRABALHO FINAL DE GRADUAÇÃO
NOVEMBRO/2016
UNIVERSIDADE FEDERAL DE ITAJUBÁ
ENGENHARIA ELÉTRICA

2
gerador de indução tipo gaiola de esquilo conectado
diretamente a rede elétrica e banco de capacitores para
realizar a compensação reativa. Elas são projetadas para
atingirem a máxima geração a uma velocidade específica,
porém com o objetivo de aumentar a eficiência da turbina
alguns geradores operam em duas configurações
diferentes, uma para baixas e outra para médias e altas
velocidades. Apesar de ser robusta, mais barata e mais
simples, turbinas de velocidade fixa apresentam elevado
stress mecânico, baixa eficiência e controle limitado da
qualidade de energia (flutuações na velocidade do vento
geram flutuações na potência gerada aumentando perdas
de energia) [3].
II.1.2 – Turbinas de Velocidade Variável
Turbinas de velocidade variável tem se tornado a
tecnologia mais utilizada nos últimos anos, elas são
projetadas para atingir a máxima eficiência aerodinâmica
para diversas velocidades. Todas as variações na
velocidade do vento são absorvidas através da variação da
velocidade do gerador, logo ao contrário das turbinas de
velocidade fixa elas possuem torque constante. São
geralmente equipadas com geradores síncronos ou de
indução duplamente alimentados, e conectadas à rede
através de conversores eletrônicos de potência, que
controlam a velocidade do gerador. As principais
vantagens dessa tecnologia são a grande eficiência,
pequeno stress mecânico e boa qualidade de energia, em
contrapartida produz harmônicos devido aos conversores
eletrônicos, requer maior manutenção devido ao aumento
de componentes, e é uma tecnologia mais cara [3].
II.1.3 – Turbinas com Controle por Estol
Controle por estol é o tipo de controle mais simples,
robusto e barato da potência gerada pela turbina. É um
controle passivo onde as pás são parafusadas no cubo com
um ângulo fixo, o design aerodinâmico deste tipo de
turbina leva o rotor ao stall (perda de energia) quando a
velocidade do vento atinge certo limite. A principal
vantagem desse tipo de controle são as baixas flutuações
de potência para altas velocidade do vento. Os pontos
fracos são a baixa eficiência para baixas velocidades e falta
de suporte de potência para distúrbios na rede [4].
II.1.4 – Turbinas com Controle de Passo
Controle de passo ou pitch control é um tipo de controle
ativo onde é alterado o ângulo das pás em relação a
incidência dos ventos a fim de aumentar ou diminuir a
potência gerada pela turbina para uma baixa ou alta
velocidade do vento. A principal vantagem desta
tecnologia é um bom controle de potência, que para altas
velocidades do vento significa manter a potência perto da
potência nominal do gerador. Como desvantagem há
grandes flutuações de potência quando a velocidade do
vento é alta [4].
II.1.5 – Turbinas com Controle Ativo por Estol
Active stall control é o controle onde o stall é controlado
de maneira ativa. Para baixas velocidades do vento esse
controle age como o controle de passo, maximizando a
potência gerada. Para altas velocidades ele altera o ângulo
de suas pás atuando de maneira contrária ao controle de
passo, limitando a potência gerada de maneira mais suave,
sem grandes flutuações de potência. Esse tipo de controle
ainda é capaz de oferecer suporte de potência ativa em caso
de distúrbios na rede [4].
II.2 – Tipos de Geradores
A seguir são apresentados os principais tipos de geradores
eólicos encontrados no mercado, classificados de acordo
com o controle de velocidade e controle de potência que
possuem.
II.2.1 – Gerador de Indução, Rotor Gaiola
Gerador de indução rotor a gaiola é um gerador robusto e
barato, usado em turbinas de velocidade fixa e conectado
diretamente a rede elétrica através do transformador.
Apresentam grandes flutuações de tensão em redes fracas
devido a falta de controles de velocidade, e absorvem
elevada potência reativa da rede, necessitando de um
capacitor para que haja a compensação de reativo. Um
soft-starter também pode ser aplicado para que a conexão
do aerogerador seja feita de forma suavizada [2].
II.2.2 – Gerador de Indução com Controle de Resistência
Externa do Rotor
Gerador de indução com controle de resistência externa do
rotor é usado em turbinas de velocidade variável, assim
como o rotor gaiola é conectado diretamente a rede e
apresenta banco de capacitores e soft-starter. O diferencial
deste gerador é a adição de uma resistência variável
externa do rotor que é controlada por um conversor
presente no eixo do gerador. Logo através da variação da
resistência do rotor é possível o controle do
escorregamento, e por conseguinte, o controle da potência
gerada. Tipicamente a variação da velocidade em relação
a síncrona é de 0% a +10% [2].
Fig. 1 - Componentes básicos de uma turbina eólica
(SPERA, 1998).
3
II.2.3 – Gerador de Indução Duplamente Alimentado
(DFIG)
O gerador de indução duplamente alimentado é encontrado
em turbinas de velocidade variável e apresenta um
conversor parcial de frequência no circuito do rotor que
realiza a compensação reativa e a conexão suavizada do
gerador no sistema. Possui um controle de velocidade
mais robusto, tendo uma variação de velocidade em
relação a síncrona de -40% a +30%. Seu ponto negativo é
o uso de anéis que geram grande manutenção [2].
II.2.4 – Gerador Síncrono com Conversor Pleno
Gerador síncrono com conversor pleno é aplicado em
turbinas de velocidade variável e conectado a rede através
de um conversor pleno de frequência (Full converter), o
conversor realiza a compensação reativa e a conexão
suavizada ao sistema. O gerador pode usar um controle de
campo com excitação elétrica [4], [5].
II.3 – Estabilidade de Frequência
Estabilidade de sistemas de potência pode ser definida
como a propriedade de um sistema que permite que este
permaneça em estado de equilíbrio e que volte a um estado
aceitável de equilíbrio após um distúrbio (KUNDUR,
1994).
Na avaliação da estabilidade de um sistema o importante é
se atentar a resposta do mesmo para pequenos e grandes
distúrbios, como a perda de um grande gerador, de um
grande bloco de carga, ou de um elo que interliga
subsistemas. Pequenos distúrbios ocorrem
frequentemente, e o sistema se ajusta a todo momento de
modo a controlá-los e atender toda a carga de maneira
satisfatória. Grandes distúrbios são mais raros e
dependendo das condições do sistema no qual ocorrem e
do local, causam sérios danos, podendo levar ao
desligamento de milhões de clientes [6].
A fim de facilitar os estudos de estabilidade de sistemas de
potência é feita a classificação de estabilidade em algumas
categorias. Nesse documento iremos analisar a
estabilidade de frequência do sistema para grandes
perturbações. Estabilidade de frequência refere-se à
habilidade do sistema de manter a frequência de regime
permanente para distúrbios que resultam em um
desbalanço entre geração e carga [4].
II.4 – Controle de Potência Ativa
A frequência de um sistema é dependente do balanço de
potência ativa, logo a variação na demanda de potência
ativa em um ponto é sentida por todo o sistema através da
variação na frequência, uma vez que o sistema é
interligado e a frequência comum a todos os pontos.
Portando existe a necessidade de que este desbalanço seja
absorvido pelos geradores elétricos presentes no sistema,
mantendo a frequência em níveis aceitáveis.
Máquinas rotacionais possuem uma energia inercial
armazenada em suas massas, em caso de um desbalanço
entre carga e geração, como a perda de um grande gerador,
máquinas síncronas inerentemente aumentam sua potência
gerada ao transformar essa energia inercial armazenada em
energia elétrica. O aumento na geração de energia e
consequentemente o suporte na manutenção da frequência
é chamado de resposta de inercia.
A resposta de inércia ajuda na redução da taxa de
decréscimo da frequência, porém para mantê-la em níveis
aceitáveis é necessário o suporte de todos os geradores
com a presença de reguladores de velocidade. O
desbalanço entre geração e carga é refletido como uma
mudança no torque elétrico do gerador, isto causa um
desequilíbrio entre o torque mecânico e o toque elétrico,
levando a variações na velocidade do rotor. Este suporte
na frequência é chamado de controle primário [3], os
geradores responsáveis pelo controle primário atuam de 1
a 30s após o desequilíbrio.
Esses são controles rápidos que atuam automaticamente
mantendo a frequência do sistema em níveis aceitáveis.
Para que a frequência volte para seu valor nominal são
necessários controles suplementares comandados a partir
de um centro de operação do sistema.
A grande maioria das turbinas eólicas utilizadas hoje em
dia são de velocidade variável por possuírem um melhor
rendimento frente a turbinas de velocidade fixa. Entretanto
turbinas de velocidade variável fazem uso de conversores
eletrônicos capazes de transformar a potência gerada em
diferentes velocidades em potência na velocidade
síncrona. O uso desses conversores desacopla o sistema
mecânico da turbina do sistema elétrico ao qual ela está
conectada, fazendo com que a turbina não seja sensível as
variações de frequência do sistema e, portanto, não gere
nenhum suporte a mesma em caso de desequilíbrios.
Devido a esse desacoplamento, o aumento da participação
de turbinas eólicas provoca a diminuição da inércia do
sistema, deixando-o mais “fraco”, e assim, mais
susceptível a variações de frequência frente a distúrbios na
rede.
Com algumas alterações no sistema de controle os
geradores de indução duplamente alimentados (DFIG)
usados em turbinas eólicas podem oferecer um suporte na
frequência muito similar ao apresentado pelos geradores
síncronos, tanto na resposta de inercia como no controle
primário [7]. Embora aerogeradores possuam baixa
energia rotacional, um parque formado por um grande
número de turbinas eólicas pode contribuir de forma
significativa no controle de potência ativa.
II.5 – Controle Primário do DFIG
O controle de potência ativa (Active Power Control –
APC) do aerogerador utilizado no estudo tem como
principal objetivo atuar em uma das seguintes condições,

4
manutenção da máxima geração de potência do
aerogerador, ou manter uma reserva operativa gerando
menos potência do que é possível e responder a excursões
de frequência do sistema.
Em condições normais de operação, com frequência do
sistema nominal, o controle de potência ativa ou está
forçando a máxima geração possível pelo aerogerador,
atuando sem restrições para uma dada velocidade vento,
ou está mantendo uma reserva operativa fazendo com que
seja gerada menos potência do que é possível, através da
alteração do ângulo das pás. (ex: potência gerada é igual a
95% da capacidade total)
Em resposta a excursões de frequência, o APC aciona um
novo modo de controle que calcula a potência gerada como
uma função da frequência do sistema. Para isso o controle
requer uma geração de potência maior que o usual para
eventos de subfrequência e uma geração de potência
menor que a usual para eventos de sobrefrequência. Logo
o aerogerador irá gerar mais potência para eventos em que
há perda de outras gerações ou menos potência para
eventos em que há perda de carga, promovendo o balanço
carga-geração.
Em resposta a excursões de frequência a potência
disponível passa por um filtro e é multiplicada por um fator
interpolado apropriado a fim de se definir um montante
(pset) de potência a ser gerada, como mostrado na figura
2. Apesar de não serem impostos limites operativos para
as variações de frequência, a planta eólica é limitada pela
máxima potência das máquinas e pela potência disponível
para uma dada velocidade do vento.
Figura 2 - Emulador do Controle de Potência Ativa
II.6 – Controle de Inércia do DFIG
Distúrbios no sistema que são causados por perda de
geração normalmente resultam em transitórios de queda da
frequência do sistema. A taxa de queda da frequência, o
menor valor que ela atinge e o tempo que a frequência leva
para voltar ao valor normal são afetados pelas
características dinâmicas dos geradores conectados a rede.
O comportamento da frequência do sistema nos primeiros
segundos que seguem a perda de um grande bloco de
geração é determinado pela resposta inercial dos geradores
conectados ao sistema. Geradores síncronos convencionais
inerentemente contribuem com uma energia inercial
armazenada, reduzindo assim a velocidade com que a
frequência cai e permitindo que controles de velocidade
mais lentos estabilizem a frequência do sistema.
Hoje em dia são poucos os aerogeradores com um controle
capaz de gerar uma resposta inercial para variações na
frequência [4], porém alguns controles já são capazes de
ajudar na manutenção da frequência após grandes eventos
de desbalanço carga-geração, similar a resposta de
geradores síncronos convencionais. Este controle é
assimétrico, ou seja, só responde a grandes eventos de
queda de frequência, resposta a eventos de sobrefrequência
são geradas pelo controle de potência ativa (APC), como
mostrado na figura 3. Rápidos controles suplementares
adicionados aos controles eletrônicos e mecânicos do
aerogerador usam a inércia do rotor para criar uma resposta
a grandes eventos de subfrequência, fazendo com que a
turbina eólica gere de 5% a 10% mais potência durante
vários segundos. Isto ajuda o sistema, dando tempo para
que outras gerações contribuam para o equilíbrio carga-
geração.
Figura 3 - Filosofia de controle de sub e
sobrefrequência.
A potência gerada pela turbina do aerogerador não é
somente limitada pelo vento disponível, mas também pelos
componentes físicos da turbina eólica. Os mais críticos são
as disposições aeromecânicas, dimensão e número de pás,
e os limites de velocidade. A energia inercial é extraída
reduzindo-se a velocidade da turbina, porém ao reduzir a
velocidade da turbina é reduzido também o torque
mecânico no eixo, aumentando ainda mais a queda na
velocidade da turbina causada pelo aumento no torque
elétrico do gerador. Essa realimentação positiva tende a
levar ao limite de redução da velocidade da turbina,
correspondente a um travamento aerodinâmico, o que
precisa ser evitado. O controle de inércia deve criar uma
margem acima deste travamento, de modo que a turbina
permaneça em operação, logo a energia inercial entregue é
limitada quando a velocidade inicial do rotor é baixa. Por
fim a energia inercial extraída da turbina precisa ser

5
recuperada, após o aumento inicial na potência elétrica esta
precisa temporariamente ficar abaixo da potência
mecânica, permitindo que a energia se recupere ao acelerar
o rotor.
A filosofia do controle de inércia é valida apenas para
grandes eventos de subfrequência, observando as
variações de frequência nos terminais de cada máquina
individualmente e aumentando temporariamente a
geração. O erro de frequência é simplesmente a variação
em relação a frequência nominal, um erro positivo
significa que a frequência do sistema está baixa e potência
extra é necessária. O controle faz com que nenhuma
potência extra seja gerada enquanto o erro de frequência
não atinja um valor mínimo, garantindo que a resposta
inercial só atenda a grandes decréscimos de frequência,
onde é importante a manutenção da estabilidade do
sistema. Pequenas perturbações caracterizadas por
operações normais da rede não são sentidas pelo controle.
O controle é representado de forma mais detalhada na
figura a seguir.
Figura 4 - Modelo do Controle de Inércia
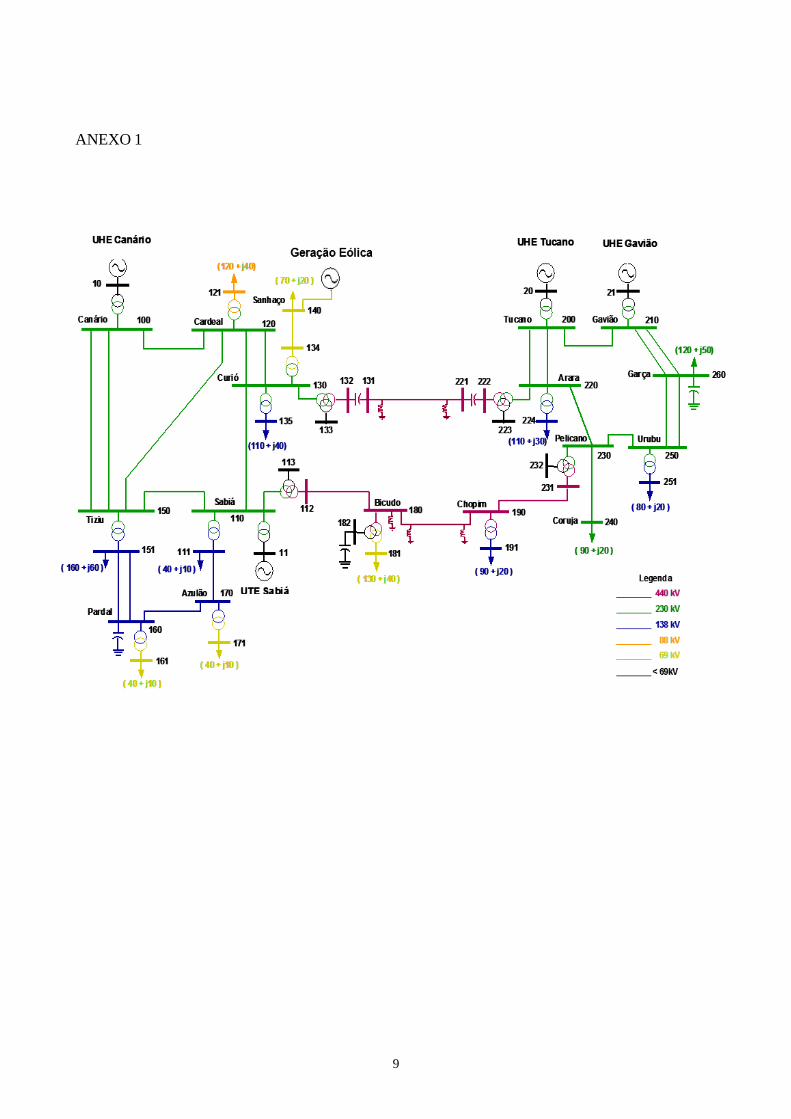
III – METODOLOGIA
Para a realização do estudo foram utilizados os softwares
ANAREDE e ANATEM, desenvolvidos pelo CEPEL
(Centro de Pesquisas de Energia Elétrica). O sistema
elétrico utilizado foi o sistema teste Brazilian Birds do tipo
hidrotérmico, composto por três centrais hidroelétricas
(Canário, Tucano e Gavião) e uma central termoelétrica
(Sabiá), foi considerada a inserção de uma geração eólica
na barra número 140 conforme figura presente no ANEXO
1. O modelo matemático da dinâmica da central eólica foi
representado através de um código definido pelo usuário
(CDU), codificação própria do programa ANATEM, cada
unidade geradora da central eólica tem a capacidade de 2,3
MW.
O sistema Brazilian Birds é composto de duas áreas,
denominadas áreas A e B, interligadas através de linhas de
transmissão em 440 kV. A área A é composta das barras
de Canário, Cardeal, Sanhaço, Curió, Tiziu, Sabiá,
Pardal,Azulão, Bicudo e Chopim. A área B é composta das
barras de Tucano, Gavião, Garça, Urubu, Arara, Pelicano
e Coruja. O intercâmbio ocorre da área B para a área A e é
em torno de 230 MW. O patamar de carga escolhido foi de
carga pesada, os dados das cargas do sistema são
mostrados na tabela a seguir.
TABELA 1 - DADOS DE CARGAS (CARGA PESADA)
Foram realizadas diferentes simulações, de modo que em
cada simulação foi alterado o ganho (kwi) do controle de
potência ativa da planta eólica. A primeira simulação foi
feita com o controle desativado, ou seja, a potência gerada
pela planta eólica permaneceu constante, não gerando
contribuição na manutenção da frequência alguma para a
variação de frequência causada pelo distúrbio. Nas
simulações seguintes o controle foi ativado e os ganhos
alterados para 10, 40, 100 e 200 respectivamente.
A simulação do distúrbio foi feita no programa ANATEM
através do comando RMGR (Remoção de Gerador) em
que foram retiradas duas máquinas da fonte Gavião, corte
de aproximadamente 150 MW. O distúrbio foi aplicado
com 0,2s, a simulação teve tempo total de 30s.
A seguir serão apresentadas as premissas adotadas e a
descrição detalhada dos cenários de simulação utilizados
no estudo.
III.1 – Premissas
Para a realização do estudo de forma satisfatória e
obtenção de resultados consistentes algumas premissas
foram adotadas, são elas:
- Velocidade do vento constante
- Ângulo das pás fixo
O objetivo do estudo é analisar como o controle de
potência ativa do aerogerador afeta as excursões de
frequência do sistema, logo a velocidade do vento e o
ângulo das pás são fatores determinantes no quanto de
potência extra poderá ser gerada pela turbina. Se
adotarmos velocidades do vento muito grandes ou muito
pequenas, em que a potência gerada pela turbina cai muito,
o suporte do aerogerador será insignificante, levando a
obtenção de resultados irrelevantes para o estudo.
III.2 – Cenário 1, 10% de geração eólica
No primeiro cenário de simulações a fonte de energia
eólica corresponde a cerca de 10% da geração total do
sistema, apresentando 135,7 MW de potência gerada por
59 unidades geradoras. Outras 3 fontes hidráulicas e uma
térmica complementam a geração total do sistema, como
mostrado na tabela 1.

6
TABELA 2 - DADOS DE GERAÇÕES CENÁRIO 1
Fonte Área Nº de
Máquinas Potência Gerada
Canário 1 3 300 MW
Sabiá 1 2 150 MW
Eólica 1 59 135,7 MW
Tucano 2 4 480 MW
Gavião 2 4 300 MW
III.3 – Cenário 2, 20% de geração eólica No segundo cenário de simulações a participação da
energia eólica foi aumentada para cerca de 20% da geração
total do sistema, com cerca de 273,7 MW representado por
119 unidades geradoras, o panorama das gerações no
cenário 2 é mostrado a seguir na tabela 2.
TABELA 3 - DADOS DE GERAÇÕES CENÁRIO 2
Fonte Área Nº de
Máquinas Potência Gerada
Canário 1 2 175,5 MW
Sabiá 1 2 150 MW
Eólica 1 119 273,7 MW
Tucano 2 4 470 MW
Gavião 2 4 300 MW
IV – RESULTADOS E DISCUSSÃO
A seguir são apresentados e discutidos os resultados
obtidos das simulações. Primeiramente será feita uma
análise do desempenho do controle de potência ativa,
verificando como o sistema reagiu para diferentes ganhos
dentro de um mesmo cenário. Posteriormente é analisado
o impacto da inserção de aerogeradores na rede, que à
princípio, diminui a inércia no sistema, com e sem o
controle de potência ativa nas excursões de frequência para
o distúrbio analisado. Para isso serão avaliados os
resultados com o mesmo ganho, mas em cenários
diferentes.
As figuras 5 e 6 evidenciam como a potência adicional
gerada pela planta eólica alivia a queda da frequência do
sistema. O menor valor de frequência verificado para a
simulação com o controlador desabilitado (curva em
vermelho) é 58,62Hz (2,3% de queda), enquanto o menor
valor verificado para simulações com o controlador
ativado e ganho igual ou superior que 40 é de 59,04Hz
(1,6% de queda), isso representa uma redução de 40% na
queda da frequência do sistema para grandes perturbações.
É possível observar que para um ganho igual ou maior que
40 a potência adicional gerada pela turbina não ultrapassa
um determinado valor, isto acontece, pois, o controlador
consegue gerar no máximo 10% a mais da potência
nominal da turbina eólica. Portando a partir do ganho kwi
igual a 40 a turbina atinge esse limite de 10%, que
determina o menor valor atingido pela frequência após a
perturbação, e após alguns segundos volta ao valor
nominal de potência gerada. A medida que aumentamos o
ganho do controlador para um valor maior que 40, quando
a potência gerada atinge seu limite, o que se vê é um
prolongamento no tempo em que a máxima potência é
gerada. Para determinados valores de ganho a potência
permanece por um tempo maior no seu valor máximo,
fazendo com que a frequência do sistema permaneça por
menos de 30s abaixo de 59,5Hz, cumprindo assim com as
normas de qualidade de energia determinadas no módulo
8 do PRODIST [8], que especifica que a frequência do
sistema não deve permanecer abaixo de 59,5 Hz ou acima
de 60,5 Hz por mais de 30s. Ganhos menores ou a ausência
do controlador levariam a medidas como o corte de carga
para a manutenção da frequência dentro de valores
aceitáveis.
Figura 5 – Potência de saída da planta eólica para o
ganho em 0 (vermelho), 10 (azul), 40 (verde), 100
(preto), 200 (rosa) no cenário 2.
Figura 6 - Frequência do sistema para o ganho em 0
(vermelho), 10 (azul), 40 (verde), 100 (preto), 200
(rosa) no cenário 2.
As figuras 7 e 8 demonstram a influência da falta de inércia
de turbinas eólicas convencionais na excursão da
frequência para grandes distúrbios, e como o controle de
potência ativa dessas turbinas pode corrigir esse problema.
Na figura 7 ambas estão com o controle de potência ativa
desativado, porém no cenário 2 (curva azul) como a
participação de energia eólica no sistema é maior, a inércia
do sistema é menor, tornando-o mais fraco e mais sensível
a problemas na rede. Isto faz com que a frequência atinja
valores menores para perdas de geração no sistema,
quando comparado com o cenário 1 (curva vermelha) onde
a participação de geração eólica é menor.

7
Figura 7 - Frequência do sistema com controle de
potência ativa desativado nos cenários 1 (vermelho) e
2 (azul).
Figura 8 - Frequência do sistema com ganho kwi
setado em 10 nos cenários 1 (vermelho) e 2 (azul).
A figura 8 mostra como a frequência do sistema reage para
o valor do ganho kwi igual a 10 nos cenários 1 (curva
vermelha) e 2 (curva azul). É possível observar que por
possuir uma participação maior de geração eólica, o
cenário 2 consegue oferecer um suporte maior, uma vez
que a quantidade de potência extra que pode ser gerada
varia de acordo com a potência nominal da planta eólica.
Logo ao oferecer um suporte de potência ativa maior, o
menor valor de frequência atingido pelo sistema no cenário
2 torna-se maior, ou seja, menos crítico do que o menor
valor de frequência atingido pelo sistema no cenário 1.
A tabela seguir resume os principais dados obtidos das
simulações.
TABELA 4 - DADOS DAS SIMULAÇÕES
V – CONCLUSÃO
A avaliação dos impactos do controle de potência ativa de
aerogeradores na frequência do sistema envolve aspectos
específicos em função do tipo de gerador e turbina usados.
Foi possível concluir que o controle de potência ativa de
aerogeradores oferece suporte à manutenção da frequência
do sistema após distúrbios na rede. A rápida resposta no
aumento da geração através dos controles eletrônicos
integrados à turbina eólica faz com que a frequência do
sistema se mantenha em níveis aceitáveis, dando tempo
para que máquinas síncronas mais lentas aumentem sua
geração de potência ativa e assumam o desbalanço gerado.
Pode-se concluir também que o controle de potência ativa
de aerogeradores permite o aumento da penetração de
energias renováveis na rede, uma vez que grandes
excursões da frequência são um fator limitante para esta
tecnologia, principalmente em sistema com baixa inércia.
Trabalhos futuros a serem realizados podem considerar os
efeitos de intermitência que foram desprezados, novas
configurações do sistema elétrico e ainda estudar o
impacto do controle de potência reativa oferecido por
controles de aerogeradores.
VI - REFERÊNCIAS
[1] SPERA, D. A. Wind Turbine Technology. New
York, USA: ASME PRESS, 1998
[2] ACKERMANN, T. Wind Power in Power Systems.
England: John Wiley and Sons, 2005.
[3] HANSEN, Anca D. et al. Dynamic wind turbine mod-
els in power system simulation tool DIgSILENT. Roskild:
Risø National Laboratory, 2003.
[4] HILBIG, Tchiarles Coutinho. APLICAÇÃO DE
AEROGERADORES DO TIPO INDUÇÃO
DUPLAMENTE ALIMENTADO NO CONTROLE DA
FREQÜÊNCIA DE SISTEMAS ELÉTRICOS. 103 f.
Dissertação (Mestrado) - Curso de Engenharia Elétrica,
PontifÍcia Universidade CatÓlica do Rio Grande do Sul,
Porto Alegre, 2006.
[5] RAMOS, Álvaro; TAVARES, Carmem; SENA,
Dêibson de. Impacto da geração distribuída eólica nos
sistemas de distribuição e transmissão. O Setor
Elétrico. Disponível em:
<http://www.osetoreletrico.com.br/web/documentos/fasci
culos/Ed75_fasc_renovaveis_cap3.pdf>. Acesso em: 18
out. 2016.
[6] KUNDUR, P. Power System Stability and Control.
New York: McGraw-Hill, 1994.
[7] Silva, Kleber Freire da. Controle e integração de
centrais eólicas à rede elétrica com geradores de indução
duplamente alimentados. São Paulo, 2006.
[8] AGENCIA NACIONAL DE ENERGIA ELÉTRICA –
ANEEL: “Procedimentos de Distribuição de Energia
Elérica no Sistema Elétrico Nacional – PRODIST, Módulo
8 – Qualidade da Energia Elétrica”

8
VII - BIOGRAFIA
João Gabriel Barbosa Fernandes
Nasceu em Piranguinho (MG), em 1993. Estudou na
mesma cidade até completar o ensino médio. Em 2011
ingressou na Universidade Federal de Itjubá – UNIFEI no
curso de engenharia elétrica. Estudou durante um ano na
Queen’s University of Belfast na Irlanda do Norte. Fez
estágio na distribuidora de energia CPFL – Companhia
Paulista de Força e Luz.
9
ANEXO 1

10
Top Related