






Línguas
Páginas
Legal


UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
E INFORMÁTICA INDUSTRIAL - CPGEI
NIKOLAS LIBERT
SISTEMA DE MEDIÇÃO CAPACITIVO PARA DETERMINAÇÃO
DA FRAÇÃO DE VAZIO EM ESCOAMENTOS BIFÁSICOS
DISSERTAÇÃO
CURITIBA 2013

NIKOLAS LIBERT
SISTEMA DE MEDIÇÃO CAPACITIVO PARA DETERMINAÇÃO DE FRAÇÃO DE VAZIO EM ESCOAMENTOS BIFÁSICOS
Dissertação de mestrado apresentada ao Programa de Pós-Graduação em Engenharia Elétrica e Informática Industrial da Universidade Tecnológica Federal do Paraná como requisito parcial para obtenção do grau de “Mestre em Ciências” – Área de Concentração: Engenharia de Automação e Sistemas. Orientador: Prof. Dr. Marco José da Silva
CURITIBA 2013

Dados Internacionais de Catalogação na Publicação L695 Libert, Nikolas Sistema de medição capacitivo para determinação de fração de vazio em escoamentos
bifásicos / Nikolas Libert. – 2013. 115 p. : il. ; 30 cm
Orientador: Marco José da Silva. Dissertação (Mestrado) – Universidade Tecnológica Federal do Paraná. Programa de Pós-
graduação em Engenharia Elétrica e Informática Industrial. Curitiba, 2013. Bibliografia: p. 103-109.
1. Escoamento bifásico – Medição. 2. Capacitadores. 3. Detectores. 4. Software –
Desenvolvimento. 5. Método dos elementos finitos. 6. Simulação (Computadores). 7. Engenharia elétrica – Dissertações. I. Silva, Marco José da, orient. II. Universidade Tecnológica Federal do Paraná. Programa de Pós-graduação em Engenharia Elétrica e Informática Industrial. III. Título.
CDD (22. ed.) 621.3
Biblioteca Central da UTFPR, Campus Curitiba

A folha de aprovação assinada encontra-se na Coordenação do Programa

Dedico esta dissertação a Don Ramón pelos bons serviços prestados à vizinhança.
AGRADECIMENTOS
Agradeço inicialmente ao professor Marco José da Silva pela orientação e oportunidade para realização do mestrado.
Aos professores Rigoberto Eleazar Melgarejo Morales e Raul Henrique Erthal pelo espaço e ajuda no laboratório de ciências térmicas (LACIT) da UTFPR.
Aos ex-colegas Reinaldo Cardoso Neto e Wytila Chagas Sieczkowski por
terem participado junto do projeto que deu origem a este trabalho (e terem desistido do mestrado a tempo de eu entrar em seu lugar).
A meus colegas pela ajuda direta ou indireta: Leonardo Lipinski, e os
amendoins muito bem vindos, Eduardo Nunes dos Santos, e sua caixa de componentes, Fernando Castillo e Tiago Piovesan Vendruscolo.
Ao pessoal do LACIT e da mecânica, pela ajuda: Eduardo Drosczaka,
Cristiane Cozin, Ernani Kopp, Fábio Pfaffenzeller, Mateus Weigert, Rafael Fabricio Alves, Reinaldo Sérgio G. Justiniano e Tomas.
Ao pessoal do laboratório de sistemas de controle avançado (LASCA) pela
ajuda com o microcontrolador, com a pilha TCP/IP, ou simplesmente pelos conselhos: César Yutaka Ofuchi, Fábio Rizental Coutinho e Rafael Daciuk.
Agradeço à Coordenação de Aperfeiçoamento de Pessoal de Nível Superior,
CAPES, pela bolsa concedida durante o desenvolvimento deste trabalho. Por fim, à minha família e meus pais, Valdir Libert e Carmem Sipert Libert,
pelo apoio, e a Deus, pela vida (já que acredito que Ele seja indiferente com relação ao trabalho em si).

Nas metrópoles milimetradas, cortadas de ordenadas e abscissas, vivem homens do século atômico, enlatados nos arranha-céus, selados pelos regulamentos, catalogados. Polimultiplurimáquinas estiram os nossos nervos nos giros da exatidão. No campo vibrante de circuitos e painéis, tecniscravos apascentam rebanhos sagrados de monstros eletrônicos.
(KOLODY, Helena, 1966)

RESUMO
LIBERT, Nikolas. Sistema de Medição Capacitivo para Determinação da Fração de Vazio em Escoamentos Bifásicos. 115 f. Dissertação – Programa de Pós-Graduação em Engenharia Elétrica e Informática Industrial, Universidade Tecnológica Federal do Paraná. Curitiba, 2013. Além de estarem presentes na natureza, os escoamentos bifásicos possuem ampla aplicação industrial, sendo encontrados nas áreas química, nuclear, de geração de energia, petrolífera e espacial, onde escoamentos do tipo gás-líquido são os mais comuns. Eles são caracterizados pelo fluxo de duas substâncias imiscíveis, denominadas fases, em um sistema. A caracterização e o estudo destes escoamentos são importantes tanto na realização de projetos, quanto no monitoramento e controle de plantas onde eles ocorrem. Um dos parâmetros utilizados na caracterização é a fração de vazio, que indica a proporção de gás em escoamentos gás-líquido. As fases de um escoamento possuem diferentes propriedades elétricas, como condutividade e permissividade. Dessa forma, caso placas condutoras sejam dispostas ao redor de uma tubulação, pode ser formado um capacitor cuja capacitância dependa das características da mistura que escoa. O objetivo desta dissertação é o desenvolvimento de um sensor capacitivo não invasivo para determinação de fração de vazio em escoamentos bifásicos. Este trabalho apresenta a montagem dos eletrodos, o desenvolvimento de um hardware para detecção de variações na capacitância dos eletrodos e o desenvolvimento de um software para leitura das medições do hardware. A resposta do sensor desenvolvido não depende apenas da proporção volumétrica das fases em seu interior, mas também do padrão de escoamento, ou seja, da forma como elas estão distribuídas. Devido a isso, a resposta do sensor foi avaliada para diversos padrões de escoamento através de simulações do campo elétrico pelo método dos elementos finitos. Com base nos resultados das simulações e nas medidas da eletrônica desenvolvida, valores de fração de vazio foram obtidos para escoamentos ar-água em bancadas de teste. Resultados obtidos mostram o bom desempenho do sistema capacitivo desenvolvido, o qual pode ser aplicado em estudos aprofundados do escoamento bifásico. Palavras-chave: Sensor capacitivo. Escoamento bifásico. Fração de vazio.

ABSTRACT
LIBERT, Nikolas. Capacitive Measurement System for Void Fraction Determination in Two-phase Flow. 115 p. Dissertação – Programa de Pós-Graduação em Engenharia Elétrica e Informática Industrial, Universidade Tecnológica Federal do Paraná. Curitiba, 2013. Two-phase flows are not only present in environmental phenomena such as clouds, but are found widespread in industrial applications. Such flows may be described as the stream of two immiscible substances, called phases, in a pipe or vessel. Most usual type of flow is gas-liquid flow and it can be found in chemical, nuclear, power generation, petroleum, and space industry. The study and characterization of such flows are important both in the realization of projects as in the monitoring and control of the facilities in which they occur. An important parameter in flow characterization is the void fraction, which indicates the volumetric amount of gas in gas-liquid flows. The gaseous and liquid phases in a flow usually present different electric properties, such as conductivity and permittivity. If electrodes are arranged around a pipe, they may form a capacitor whose capacitance depend upon the flowing mixture properties and their spatial distribution. The main goal of this work is to develop a non-invasive capacitive probe for void fraction determination in two-phase flow. It describes the assembly of the electrodes, the development of hardware for capacitance measurement, and the development of software that provides access to the measurement data obtained by the hardware. The response of capacitive sensors depends not only on void fraction values, but also on the flow pattern, that is, on the way that phases are distributed inside the pipe. Due to this fact, electric field simulations of the sensor’s response at different flow patterns were performed. Based on the results of the simulations and on the measurement results, void fraction values for air-water flow at controlled conditions was calculated and comparatively evaluated. The results obtained show the good performance of developed capacitive probe which may now be deployed in two-phase flow studies. Keywords: Capacitive sensor. Two-phase flow. Void fraction.

LISTA DE FIGURAS
Figura 1 – Padrões de escoamento gás-liquido em dutos verticais e horizontais. ....... 23 Figura 2 – Exemplo de mapa de fluxo de Taitel e Dukler. ........................................ 24 Figura 3 – Representação esquemática de um amplificador operacional. ................... 30 Figura 4 – Representação do módulo do ganho em malha aberta de um amplificador
operacional. ............................................................................................... 31 Figura 5 – Amplificado operacional com adição de componentes passivos.
Amplificador inversor. .............................................................................. 32 Figura 6 – Modelo elétrico simplificado de um sensor capacitivo de placas côncavas. 39 Figura 7 – Representação esquemática e corte da seção transversal de eletrodo de
placas côncavas. ........................................................................................ 41 Figura 8 – Eletrodo de placas côncavas orientado de duas formas diferentes em
relação ao escoamento. .............................................................................. 41 Figura 9 – Geometria do Eletrodo em Anel. .............................................................. 42 Figura 10 – Corte da seção transversal e representação esquemática de eletrodo
helicoidal. .................................................................................................. 43 Figura 11 – Capacitâncias parasitas em um sensor capacitivo. .................................. 44 Figura 12 – Circuito de carga e descarga. .................................................................. 45 Figura 13 – Circuito de medição baseado em corrente alternada. .............................. 45 Figura 14 – Diagrama esquemático do sistema de medição. ...................................... 47 Figura 15 – Geometria dos eletrodos utilizados. ........................................................ 48 Figura 16 – Foto e diagrama de montagem dos eletrodos. ......................................... 49 Figura 17 – Diagrama simplificado do hardware........................................................ 50 Figura 18 – Foto do sistema eletrônico desenvolvido. ................................................ 50 Figura 19 – Diagrama do módulo de excitação. ......................................................... 51 Figura 20 – Diagrama do módulo de recepção. .......................................................... 52 Figura 21 – Amplificador de transimpedância. .......................................................... 53 Figura 22 – Amplificador subtrator. .......................................................................... 53 Figura 23 – Demodulador e seus filtros de entrada e saída. ....................................... 55 Figura 24 – Captura de tela da interface gráfica desenvolvida. ................................. 56 Figura 25 – Eletrodo de placas paralelas (a) e seu circuito elétrico equivalente (b). . 59 Figura 26 – Circuito elétrico equivalente da célula de placas paralelas para fluido não
isolante. .................................................................................................... 60 Figura 27 – Eletrodo de placas paralelas preenchido com ar e água (a) e circuito
equivalente que não é mais válido (b). ...................................................... 61 Figura 28 – Ângulos entre os eletrodos e diagrama com dimensões do modelo
utilizado nas simulações ............................................................................ 62 Figura 29 – Curva de convergência para escolha do comprimento do universo. ........ 63 Figura 30 – Curva de convergência para escolha do diâmetro do universo. ............... 63 Figura 31 – Curva de convergência para escolha do tamanho dos elementos da malha.
................................................................................................................. 64 Figura 32 – Representação dos eletrodos da sonda capacitiva ................................... 64 Figura 33 – Representação simplificada de um escoamento estratificado. ................. 65 Figura 34 – Módulo e fase da admitância da sonda capacitiva para diferentes frações
de vazio em escoamento estratificado. Frequência de 5 MHz. ................... 66 Figura 35 – Representação simplificada de um escoamento anular. ........................... 66

Figura 36 – Módulo e fase da admitância da sonda capacitiva para diferentes frações de vazio em escoamento anular. Frequência de 5 MHz. ............................ 67
Figura 37 – Ilustração do modelo utilizado na simulação do escoamento de bolhas dispersas. .................................................................................................. 68
Figura 38 – Capacitância da sonda capacitiva para diferentes frações de vazio em escoamento de bolhas dispersas. ............................................................... 68
Figura 39 – Comparativo no escoamento de bolhas dispersas entre as capacitâncias encontradas pela relação de Maxwell e pela simulação com bolhas posicionadas aleatoriamente. ..................................................................... 70
Figura 40 – Módulo e fase da admitância da sonda capacitiva para diferentes frações de vazio em escoamento de bolhas dispersas com modelo de Maxwell. Frequência de 5 MHz. ............................................................................... 70
Figura 41 – Representação dos segmentos que compõe os escoamentos em golfadas. 71 Figura 42 – Módulo e fase da admitância da sonda capacitiva para diferentes frações
de vazio nos escoamentos estratificados com e sem filme de líquido. Frequência de 5 MHz. ............................................................................... 72
Figura 43 – Admitância absoluta normalizada para diversos níveis de água (a) e representação do modelo da resposta espacial (b). .................................... 74
Figura 44 – Admitância absoluta normalizada para diversos níveis de água com eletrodo de blindagem de 80 mm. ............................................................. 74
Figura 45 – Amplificador de transimpedância com capacitâncias parasitas. .............. 75 Figura 46 - Amplificador de transimpedância com impedâncias de entrada
representadas por circuito equivalente de Thévenin. ................................ 75 Figura 47 – Tensões teóricas na saída do circuito em função da fração de vazio para
diferentes padrões de escoamento. ............................................................ 76 Figura 48 – Variação da tensão de saída em relação ao percentual de fração de vazio
para padrões de escoamento simulados. .................................................... 77 Figura 49 – Diferença percentual entre respostas normalizadas para modelo ideal e
não-ideal. .................................................................................................. 78 Figura 50 – Módulo e fase da admitância da sonda capacitiva para diferentes padrões
de escoamento. .......................................................................................... 79 Figura 51 – Tempos de subida e de descida do sistema. ............................................ 82 Figura 52 – Representação esquemática da bancada de testes estáticos para
escoamento estratificado. .......................................................................... 83 Figura 53 – Comparativo entre admitâncias absolutas e pontos medidos para
escoamento estratificado em bancada estática. ......................................... 84 Figura 54 – Comparativo entre saídas do escoamento estratificado para simulações e
bancada de testes estática. ........................................................................ 84 Figura 55 – Curvaturas no menisco de líquido para diferentes frações de vazio em
escoamento estratificado. .......................................................................... 85 Figura 56 – Representação esquemática da bancada de testes vertical. ..................... 87 Figura 57 – Mapa de fluxo de Taitel e Dukler para a bancada de testes vertical. ..... 88 Figura 58 – Fotos do escoamento para cada ponto medido na bancada vertical. ...... 88 Figura 59 – Valores das frações de vazio médias para sensor capacitivo e sensor wire-
mesh. Escoamento Vertical. ...................................................................... 89 Figura 60 – Diferença na fração de vazio média do sensor capacitivo em relação ao
wire-mesh. Escoamento Vertical. .............................................................. 89 Figura 61 – Distorções nas medições quando as bolhas são menores que a resolução
espacial. .................................................................................................... 90 Figura 62 – Frações de vazio calculadas pelos sensores wire-mesh e capacitivo para os

pontos V7, V9 e V13 durante 5 segundos. ................................................ 90 Figura 63 – Representação Esquemática da Bancada de Testes Horizontal. ............. 91 Figura 64 – Mapa de fluxo de Taitel e Dukler para a bancada de testes horizontal. . 92 Figura 65 – Fotos do escoamento para cada ponto medido na bancada horizontal. .. 92 Figura 66 – Curva de ajuste para bolhas alongadas obtida a partir de média
ponderada. ................................................................................................ 94 Figura 67 – Curva de ajuste para escoamento vertical obtida a partir de média
ponderada. ................................................................................................ 95 Figura 68 – Diferenças entre frações de vazio médias obtidas com sensor wire-mesh e
sensor desenvolvido para diferentes valores de . .................................... 95 Figura 69 – Valores da fração de vazio média para sensor capacitivo e wire-mesh.
Escoamento Horizontal. ............................................................................ 96 Figura 70 – Diferença da fração de vazio média do sensor capacitivo em relação ao
wire-mesh. Escoamento Horizontal. .......................................................... 96 Figura 71 – Relação entre a velocidade média das bolhas e o fator de descolamento
que minimiza o desvio entre os sensores de referência e desenvolvido. ...... 97

LISTA DE SIGLAS
AD Analógico Digital CA Corrente Alternada CC Corrente Contínua CI Circuito Integrado DDS Direct Digital Synthesizer EVA Etil Vinil Acetato FEM Finite Elements Method IHM Interface Homem Máquina PVC Polyvinyl Chloride SPI Serial Peripheral Interface mC Microcontrolador

LISTA DE SÍMBOLOS
Fração de vazio Constante dielétrica Permissividade relativa complexa
0 Permissividade elétrica do vácuo
Coeficiente de descolamento das bolhas alongadas Densidade de carga elétrica Resistividade
Condutividade Frequência angular
VA Ganho de tensão em malha aberta 0VA Ganho CC em malha aberta
VMFA Ganho de tensão em malha fechada B Densidade de fluxo magnético B
Susceptância elétrica c Velocidade da luz
PAC Soma das capacitâncias parasitas paralelas na entrada dos eletrodos PBC Soma das capacitâncias parasitas paralelas na saída dos eletrodos
E
Intensidade de campo elétrico D
Campo de deslocamento elétrico G Condutância elétrica H
Intensidade de campo magnético j Unidade imaginária J
Densidade de corrente
GJ Velocidade superficial do gás LJ Velocidade superficial do líquido
R Resistência elétrica V
Alimentação positiva do amplificador operacional V
Alimentação negativa do amplificador operacional
DDSV Tensão gerada pelo DDS EV Tensão de entrada nos circuitos NV Entrada inversora do amplificador operacional
PV Entrada não inversora do amplificador operacional SV Tensão de saída nos circuitos SV Tensão de saída do amplificador operacional X Reatância elétrica Y Admitância elétrica Z Impedância elétrica
DDSZ Impedância de saída do sinal gerado pelo DDS
SUMÁRIO
1 INTRODUÇÃO ..................................................................................................... 15 1.1 MOTIVAÇÕES E JUSTIFICATIVA .................................................................. 15 1.2 OBJETIVOS E METODOLOGIA ...................................................................... 16 1.3 APRESENTAÇÃO DO DOCUMENTO ............................................................. 17 2 FUNDAMENTAÇÃO TEÓRICA .......................................................................... 19 2.1 ESCOAMENTOS BIFÁSICOS............................................................................ 19 2.1.1 Fração de Vazio ............................................................................................... 19 2.1.2 Velocidade Superficial ...................................................................................... 21 2.1.3 Padrões de Escoamento .................................................................................... 22 2.1.4 Mapas De Fluxo ............................................................................................... 23 2.2 MEDIÇÃO DE IMPEDÂNCIA ........................................................................... 25 2.2.1 Impedância Elétrica .......................................................................................... 25 2.2.2 Permissividade Complexa ................................................................................. 26 2.2.3 Modelo Quase Estático do Campo Elétrico ...................................................... 27 2.2.4 Amplificadores Operacionais ............................................................................ 30 2.3 TÉCNICAS DE MEDIÇÃO DE FRAÇÃO DE VAZIO ...................................... 33 2.3.1 Ultrassom ......................................................................................................... 33 2.3.2 Raios x ............................................................................................................. 34 2.3.3 Raios g ............................................................................................................. 34 2.3.4 Micro-ondas ...................................................................................................... 35 2.3.5 Métodos Óticos ................................................................................................. 36 2.3.6 Impedância Elétrica .......................................................................................... 37 2.3.7 Considerações ................................................................................................... 38 2.4 SENSORES CAPACITIVOS ............................................................................... 39 2.4.1 Modelo Simplificado ......................................................................................... 39 2.4.2 Arranjos de Eletrodos ....................................................................................... 40 2.4.3 Circuitos para Medição .................................................................................... 43 2.4.4 Considerações ................................................................................................... 46 3 DESENVOLVIMENTO DO SENSOR ................................................................... 47 3.1 DESCRIÇÃO DO SISTEMA............................................................................... 47 3.2 ELETRODOS ...................................................................................................... 48 3.3 HARDWARE ...................................................................................................... 49 3.3.1 Módulo de Excitação ........................................................................................ 50 3.3.2 Módulo de Recepção ......................................................................................... 51 3.3.3 Módulo Microcontrolado .................................................................................. 55 3.4 SOFTWARE ....................................................................................................... 56 3.5 CONSIDERAÇÕES ............................................................................................. 57 4 SIMULAÇÕES ....................................................................................................... 59 4.1 MODELO EQUIVALENTE DOS ELETRODOS ................................................ 59 4.2 MALHA E GEOMETRIA DO MODELO SIMULADO ...................................... 62 4.3 ESCOAMENTO ESTRATIFICADO .................................................................. 65 4.4 ESCOAMENTO ANULAR ................................................................................. 66 4.5 BOLHAS DISPERSAS ........................................................................................ 67 4.6 ESCOAMENTO INTERMITENTE .................................................................... 71 4.7 RESOLUÇÃO ESPACIAL .................................................................................. 73

4.8 RESPOSTA TEÓRICA DO CIRCUITO ............................................................ 75 4.9 RESULTADO GERAL ........................................................................................ 78 4.10 CONSIDERAÇÕES ........................................................................................ 80 5 TESTES E RESULTADOS .................................................................................... 81 5.1 TEMPO DE RESPOSTA DO CIRCUITO.......................................................... 81 5.2 TESTE ESTÁTICO ............................................................................................ 82 5.3 TESTES DINÂMICOS ........................................................................................ 85 5.3.1 Escoamento Vertical ......................................................................................... 86 5.3.2 Escoamento Horizontal ..................................................................................... 91 5.4 CONSIDERAÇÕES ............................................................................................. 97 6 CONSIDERAÇÕES FINAIS .................................................................................. 99 6.1 TRABALHOS FUTUROS ................................................................................. 100 REFERÊNCIAS ...................................................................................................... 103 APÊNDICE A – SÉRIES TEMPORAIS (ESCOAMENTO VERTICAL)............... 111 APÊNDICE B – SÉRIES TEMPORAIS (ESCOAMENTO HORIZONTAL) ......... 113
15
1 INTRODUÇÃO
1.1 MOTIVAÇÕES E JUSTIFICATIVA
Escoamentos bifásicos podem ser definidos como uma mistura de duas fases
em movimento. Nestes escoamentos as fases consistem de dois materiais que podem
estar respectivamente nos estados gasoso-sólido, gasoso-líquido, líquido-sólido ou
líquido-líquido. Do ponto de vista industrial, os escoamentos do tipo gás-líquido são
os mais comuns. Uma característica dos escoamentos bifásicos é a existência de uma
ou mais interfaces ou descontinuidades entre as fases, logo, no caso líquido-líquido as
fases devem ser constituídas de fluidos diferentes e imiscíveis (ISHII; HIBIKI, 2011).
Estes escoamentos existem em diversas indústrias, dentre as quais podem ser
citadas as químicas, nucleares, de energia geotérmica, petrolífera e espacial. Além
disso, tais escoamentos podem ser encontrados em sistemas de transferência de calor,
em dispositivos eletrônicos, como cristais líquidos, em fenômenos meteorológicos,
como na formação de gelo e na dinâmica das nuvens, e em sistemas biológicos, como
no sistema cardiovascular.
Na indústria química e de processos, os escoamentos bifásicos estão presentes
em reatores, caldeiras, condensadores, evaporadores e plantas de destilação. Já na
indústria petrolífera, eles ocorrem tanto na extração como no transporte por
tubulações, sendo a boa compreensão e o monitoramento dos escoamentos
fundamental para o projeto e o aprimoramento operacional das instalações. Em
reatores nucleares, o processo de resfriamento do núcleo gera um escoamento de água
e vapor cujo domínio é importante para que seja garantida a segurança de operação
da usina, sem que haja alagamento ou fusão do núcleo. Já na geração de energia
geotérmica, a prevenção de golfadas num escoamento de água e vapor é essencial para
o bom funcionamento da planta (SHOHAM, 2006).
A forma como as fases se encontram num dado escoamento pode gerar
diferentes interfaces na mistura e o formato e comportamento de tais interfaces
permite a classificação do escoamento em diferentes categorias denominadas padrões
de escoamento (FALCONE; HEWITT; ALIMONTI, 2009). Pode-se afirmar que
assim como os escoamentos monofásicos são classificados pelo regime de escoamento
(laminar, de transição ou turbulento), os escoamentos bifásicos o são por estes
padrões. Dois fatores relevantes para a existência de um dado padrão de escoamento

16
são a concentração da área interfacial e a proporção volumétrica entre as fases (ISHII;
HIBIKI, 2011).
Estudos avançados sobre escoamentos multifásicos são imprescindíveis para
que projetos de engenharia com eles relacionados possam ser otimizados e ter seus
custos reduzidos. É comum que estes estudos se baseiem na observação de
escoamentos gerados em ambiente controlado. Nestes casos existe a necessidade de
utilização de plantas de teste piloto, onde situações existentes na indústria são
recriadas e parâmetros de interesse ligados ao escoamento são registrados por
sensores. Nem sempre os sistemas de medição utilizados na indústria possuem a
flexibilidade exigida para operação em bancadas experimentais. Logo, além de
possuírem um papel importante no controle e monitoramento dos processos
industriais onde os escoamentos multifásicos ocorrem, os sistemas de medição de
escoamentos multifásicos são fundamentais para validação de modelos matemáticos
na área de pesquisa.
1.2 OBJETIVOS E METODOLOGIA
O objetivo principal deste trabalho é desenvolver um sensor capacitivo de
placas côncavas para auxílio na caracterização de escoamentos bifásicos. Este sensor
deve ser capaz de fornecer uma estimativa da fração volumétrica de cada fase no
escoamento assim como informações temporais que reflitam sua dinâmica. Diferentes
materiais possuem diferentes propriedades elétricas, como permissividade e
condutividade. Ou seja, é possível que as fases de um escoamento bifásico sejam
distinguidas por meio de suas características elétricas.
Os objetivos intermediários para que o desenvolvimento do sistema seja
possível são: (i) simular a resposta do sensor para diferentes frações volumétricas de
fase e padrões de escoamento, (ii) desenvolver um hardware com velocidade e
sensibilidade suficientes para detecção de variações no escoamento, (iii) desenvolver
um software com uma interface gráfica para comunicação com o hardware e
aquisição de dados, assim como (iv) integrar as informações das simulações com os
dados que venham a ser adquiridos pelo software, possibilitando a estimativa da
fração das fases no escoamento.
O projeto, as simulações e os testes do sistema serão realizados para
escoamentos do tipo ar-água. Além disso, todo o trabalho será realizado para uma
17
tubulação de acrílico de meia polegada.
1.3 APRESENTAÇÃO DO DOCUMENTO
Antes que seja feita qualquer introdução sobre sensores capacitivos, é
necessário que algumas informações básicas sobre escoamentos bifásicos sejam
expostas. Isso será realizado no início do capítulo 2 , com a apresentação do conceito
de padrão de escoamento e outros termos relacionados, como fração de vazio. Ainda
neste capítulo, serão mostradas algumas noções de eletrônica e eletromagnetismo
necessárias para a compreensão do desenvolvimento do sensor. Posteriormente, será
feita uma revisão bibliográfica sobre as principais técnicas de medição de fração de
fase para escoamentos bifásicos. Por fim, com base em informações da literatura, o
funcionamento e as características de alguns tipos de sensores capacitivos serão
apresentados.
O capítulo 3 se destina a descrever o desenvolvimento do sensor. Inicialmente
os eletrodos utilizados são mostrados. Posteriormente, o funcionamento do hardware
do sistema é detalhado e suas características e limitações apresentadas. Também é
feito um breve relato sobre o software desenvolvido.
Os dados de saída do sistema de medição precisam ser interpretados para
obtenção de uma estimativa de fração de fase. A fim de possibilitar esta
interpretação, a resposta dos eletrodos utilizados deve ser conhecida. No capítulo 4 as
respostas dos eletrodos em função do padrão de escoamento são obtidas por meio de
simulações pelo método dos elementos finitos. Por fim, a resposta do hardware é
calculada com base nos dados das simulações.
O sistema foi testado em bancadas estáticas e dinâmicas. Os resultados se
encontram no capítulo 5 . Nos testes estáticos, a saída foi comparada com valores
teóricos esperados. Já nos testes dinâmicos, foram gerados escoamentos ar-água
horizontais e verticais e a saída foi comparada com um medidor de referência (sensor
wire-mesh). Considerações finais sobre os resultados e possíveis melhorias podem ser
vistas no capítulo 6 .

18

19
2 FUNDAMENTAÇÃO TEÓRICA
No desenvolvimento de sensores para escoamentos bifásicos o estudo de
conceitos de diversas áreas é necessário. A revisão de alguns destes conceitos,
envolvendo escoamentos bifásicos, eletrônica e técnicas de medição, será apresentada
a seguir.
2.1 ESCOAMENTOS BIFÁSICOS
2.1.1 Fração de Vazio
Os modelos de escoamento bifásico utilizados para predição de transição de
padrão de escoamento e cálculo de queda de pressão ou transferência de calor
dependem da fração de vazio. Esta dependência pode ser direta, ou indireta, uma vez
que vários parâmetros, como densidade e viscosidade da mistura, são calculados a
partir dela. Devido a isso, este é um dos parâmetros mais importantes na
caracterização de escoamentos bifásicos (THOME, 2007a, p. 17–1).
A fração de vazio pode ser interpretada como a fração volumétrica ocupada
pelo gás numa mistura em um dado instante de tempo (CROWE; MICHAELIDES,
2006). No entanto, Bertola (2003) fornece uma definição mais generalista ao afirmar
que a fração de vazio é um indicador adimensional da fração que a fase gasosa ocupa
em um domínio espacial ou temporal. Segundo ele, num dado instante de tempo t , o
interior de um duto pode ser representado por um conjunto de pontos P ,
pertencentes ao domínio geométrico tridimensional onde se encontra o duto. Este
conjunto de pontos, com posições representadas por x , pode ser dividido nos
subconjuntos GP e LP , que representam as regiões preenchidas por gás e líquido,
respectivamente. Com base nisso, pode ser definida a função densidade de gás
( , )GF tx , dada por
1,
( , )0,
GG
G
se PF t
se P
xx
x . (2.1)
20
Caso seja feita a média temporal ou espacial da equação (2.1), podem ser
obtidas as quatro definições de fração de vazio descritas a seguir.
Fração de vazio local. A fração de vazio local para um ponto x é obtida por
meio da média temporal da função densidade de gás durante um intervalo de tempo
T . Ela pode ser calculada por (2.2) e representa a fração de tempo em que existe a
presença de gás em um ponto qualquer x do escoamento.
1
( ) ( , )GT
F t dtT
x x (2.2)
Fração de vazio unidimensional. Também conhecida como fração de vazio de
corda (THOME, 2007a), representa a fração de gás que existe ao longo de uma linha
de comprimento L . Seu cálculo é dado por (2.3). Na prática, pode-se dizer que
sensores de raio x ou óticos com feixes de emissão estreitos medem uma fração de
vazio que se aproxima da unidimensional.
11
( ) ( , )GL
t F t dlL
x (2.3)
Fração de vazio bidimensional. A média da função densidade de gás em uma
superfície de área A da origem a fração de vazio bidimensional, representada por
21
( ) ( , )GA
t F t dAA
x . (2.4)
Fração de vazio tridimensional. Corresponde à fração volumétrica ocupada
pelo gás no instante t , sendo calculada pela equação (2.5) numa região de volume V .
31
( ) ( , )GV
t F t dVV
x (2.5)
Fração de vazio com média espacial e temporal. É possível também que se
realize a média espacial e temporal da função densidade de gás simultaneamente.
Neste caso não há diferença na ordem de realização das operações de média, existindo

21
três possíveis definições de fração de vazio:
1
2
3
1 1 1 1( , ) ( , )
1 1 1 1( , ) ( , )
1 1 1 1( , ) ( , )
G GL T T L
G GA T T A
G GV T T V
F t dt dL F t dL dtL T T L
F t dt dA F t dA dtA T T A
F t dt dV F t dV dtV T T V
x x
x x
x x
. (2.6)
A fração de vazio de dupla média é importante para este trabalho, pois na
prática ela é medida pela maioria dos sensores. Isso ocorre porque os sensores
possuem um tempo mínimo de aquisição, que limita sua velocidade de resposta e
corresponde ao período T de realização da média. A partir de agora, sempre que o
termo fração de vazio ou o símbolo forem empregados, eles estarão se referindo ao
elemento 3 da equação (2.6).
Outro conceito muito utilizado é o de fração de líquido ou holdup. Ele é
análogo à fração de vazio, sendo que ao invés do uso da função densidade de gás é
utilizada a função densidade de líquido. Esta função tem valor unitário para pontos
pertencentes ao conjunto LP e nulo para os demais. Em escoamentos gás-liquido, a
soma das frações de vazio e de líquido é sempre unitária.
Quando o período T de aquisição dos sensores é pequeno em relação à
duração das oscilações num escoamento, o valor da fração de vazio depende do
instante em que a média temporal é realizada. Assim, a realização de várias medições
em instantes de tempo separados por intervalos de amostragem AT T dará origem
a uma sequência de valores de fração de vazio. Caso a sequência seja organizada por
ordem de realização das medidas, cada elemento que a compõe terá alguma relação
com os elementos vizinhos. Assim, ela receberá o nome de série temporal de frações
de vazio. Séries temporais possuem a característica de perderem o significado quando
a ordem de seus elementos é alterada.
2.1.2 Velocidade Superficial
A velocidade superficial de uma fase pode ser definida pela equação (2.7),

22
onde kq é a vazão volumétrica da fase k (dada em 3m s ) e A é a área da seção
transversal do tubo. A partir de agora, as velocidades superficiais da fase líquida e
gasosa serão representadas por LJ e GJ , respectivamente.
kk
qJ
A (2.7)
A velocidade superficial é um parâmetro muito utilizado na descrição das
condições de operação dos sistemas bifásicos e pode ser interpretada como a
velocidade que uma fase teria caso ela fluísse sozinha no interior do duto, mantendo-
se a vazão constante (SHOHAM, 2006).
2.1.3 Padrões de Escoamento
À forma como duas fases se distribuem num escoamento em um duto dá-se o
nome de padrão de escoamento. Cada possível padrão está ligado a uma distribuição
espacial distinta das interfaces entre as fases, o que implica em características de
escoamento diferentes (como distribuição de velocidades). Três fatores definem a
existência de um dado padrão de escoamento em um sistema bifásico. Um deles é a
vazão de cada fase, que é um parâmetro operacional do sistema. Há também um fator
geométrico, que envolve as características de construção do duto e sua inclinação. E
por fim, a ocorrência de um dado padrão de escoamento também é determinada pelas
características físicas dos fluidos, como densidade, tensão superficial e viscosidade
(SHOHAM, 2006).
Devido à subjetividade e aos diferentes níveis de detalhamento que podem ser
desejados na definição dos padrões de escoamento, não existe um grupo unificado de
padrões que seja utilizado por todos autores. Na Figura 1, estão ilustrados alguns
padrões citados por Oliemans e Pots (2006).
No escoamento de bolhas dispersas, existe uma grande quantidade de bolhas
espalhadas numa fase líquida contínua. Já o escoamento em golfadas, é caracterizado
pela passagem de grandes bolhas, ou golfadas, seguidas por um pistão de líquido,
onde pode haver pequenas bolhas dispersas. Em tubos verticais, para altas
velocidades de escoamento, estas golfadas podem se quebrar dando origem ao
escoamento agitado, um escoamento instável onde o líquido se move de forma

23
aleatória. No escoamento anular existe um núcleo gasoso que é envolto por uma
camada de líquido. Esta camada fica em contato com as paredes do tubo, podendo
haver gotículas no núcleo gasoso assim como bolhas na camada líquida. Por fim, o
escoamento estratificado, que ocorre apenas em dutos horizontais, é caracterizado
pela separação gravitacional do líquido e do gás, que fluem pela parte inferior e
superior do tubo, respectivamente. Devido à ação da gravidade, quando existe a
presença de bolhas nos escoamentos horizontais, estas tendem a se acumular na parte
superior do duto (FALCONE; HEWITT; ALIMONTI, 2009, p. 6).
Para o escoamento de bolhas dispersas, a velocidade do gás é muito próxima da
velocidade do líquido. Conforme indicado pelas setas na Figura 1, à medida que a
vazão de gás aumenta, o padrão de escoamento é alterado até que se torne do tipo
anular.
2.1.4 Mapas De Fluxo
Mapas de fluxo consistem de um diagrama de dois eixos que indicam as
fronteiras de transição entre os possíveis padrões de escoamento em um duto
(THOME, 2007b, p. 12–4). Deste modo, por meio deles é possível que se faça uma
Figura 1 – Padrões de escoamento gás-liquido em dutos verticais e horizontais.
Fonte: Adaptado de Oliemans e Pots (2006, p. 2)

24
predição do padrão de escoamento com base nas condições de operação do sistema.
Isso faz com que eles sejam fundamentais quando se deseja utilizar modelos de queda
de pressão que dependam do tipo de padrão de escoamento (CHENG; RIBATSKI;
THOME, 2008).
Os mapas de fluxo podem ser classificados em empíricos ou semiteóricos e
teóricos, sendo que a vantagem dos últimos é que eles costumam ser mais
generalistas, funcionando para diferentes condições de operação.
Um mapa de fluxo semiteórico que mostrou bons resultados para diversas
condições de operação é o mapa de Taitel e Dukler. Este mapa tenta prever o padrão
de escoamento usando um balanço de momento, sendo seus eixos formados por
parâmetros adimensionais. Com a definição das condições operacionais do sistema,
como características dos fluidos, diâmetro do tubo, temperatura e pressão, as curvas
do mapa de fluxo podem ser obtidas. Além disso, os parâmetros adimensionais dos
eixos vertical e horizontal, que são de difícil interpretação, podem ser convertidos nas
velocidades superficiais de líquido e gás (TAITEL; DUKLER, 1976, p. 53).
Um exemplo de mapa de fluxo de Taitel e Dukler para escoamento horizontal
pode ser visto na Figura 2. As linhas de fronteira entre dois padrões de escoamento
diferentes são apenas uma aproximação, nem sempre condizendo com o que é
observado experimentalmente. Além disso, a mudança de um padrão de escoamento
Figura 2 – Exemplo de mapa de fluxo de Taitel e Dukler.
Válido para tubulação horizontal de 26 mm de diâmetro interno com escoamento ar-água.
0,001
0,01
0,1
1
10
0,001 0,01 0,1 1 10 100
J L [m
/s]
JG [m/s]
Golfadas
Estratificado Liso
Estratificado
Ondulado
Anular
Bolhas Dispersas

25
para outro não ocorre de forma abrupta, existindo uma faixa de transição na região
das linhas.
2.2 MEDIÇÃO DE IMPEDÂNCIA
2.2.1 Impedância Elétrica
A impedância elétrica descreve a relação entre tensão e corrente em
dispositivos ou circuitos elétricos. Caso um sinal de tensão ( ) cos( )vv t V t ,
com amplitude V , fase v e frequência angular 2 f , seja aplicado a um circuito,
surgirá uma corrente ( ) cos( )ii t I t , de amplitude I e fase i . Para uma dada
frequência , os sinais de tensão e corrente podem ser representados na forma
fasorial por vjV e V e ijI e I , onde j é a unidade imaginária 1 e os
termos em negrito indicam variáveis complexas. Aplicando-se a lei de Ohm na forma
fasorial é possível, especificamente para a frequência , a definição da impedância
pela equação (2.8). Esta equação poderá ser aplicada a cada par tensão-corrente de
uma determinada frequência. Ou seja, a impedância é uma grandeza dependente da
frequência.
( ) [ ]v i zj jV
e Z eI
V
ZI
(2.8)
Como a impedância Z é uma grandeza complexa, pode ser escrita na forma
R jX Z , onde a parte real é chamada de resistência e a parte imaginária de
reatância. Outro conceito muito utilizado é o de admitância elétrica, que corresponde
ao inverso da impedância, como pode ser visto na equação (2.9). Nesse caso, G é
chamado de condutância e B de susceptância (O’MALLEY, 1993, p. 371-377).
1
[ ]G jB S YZ
(2.9)
Os termos R e G representam as perdas do material ou circuito, enquanto
os termos X e B representam a energia reativa que o circuito armazena a cada ciclo.
26
Quando a fase z da impedância for igual a zero, o circuito será puramente resistivo,
ou seja, X e B serão nulos. Já quando z for igual a / 2 ou / 2 , o circuito
será puramente indutivo ou capacitivo, respectivamente. Nestes casos, R e G serão
nulos.
2.2.2 Permissividade Complexa
A impedância de um material dielétrico é determinada por sua geometria e
suas propriedades elétricas, podendo ser descrita pela equação (2.10). Nessa equação,
2 f é a frequência angular, gk é uma constante geométrica, 0 8,85 pF m é a
permissividade do vácuo e é a permissividade relativa complexa do material.
0
1
gjwk Z
(2.10)
Embora a impedância elétrica seja capaz de descrever a resposta de sensores
resistivos e capacitivos, quando se deseja caracterizar os materiais no interior dos
mesmos, a permissividade relativa complexa deve ser utilizada. Sua vantagem é a
capacidade de descrição dos materiais sem influência da geometria do sensor (DA
SILVA, 2008, p. 35).
A permissividade relativa complexa pode ser representada pela equação
(2.11), onde Re e Im são, respectivamente, as partes real e imaginária oposta de .
O termo Re é muitas vezes chamado de constante dielétrica e Im , de fator de
perda. Enquanto Re representa a capacidade do material de armazenar energia, Im
representa as perdas do mesmo.
Re Imj (2.11)
A permissividade relativa complexa é um parâmetro dependente da
frequência, obedecendo a efeitos de polarização e mecanismos dielétricos pertencentes
a cada material. Para diversos fluidos, dentre os quais estão incluídos a água e o ar
(DA SILVA, 2008, p. 40), em frequências de até algumas dezenas de mega-hertz, a
dependência da permissividade complexa com a frequência pode ser expressa pela

27
equação (2.12). Os símbolos e são, respectivamente, a constante dielétrica e a
condutividade do fluido.
0
j
(2.12)
Para um fluido de condutividade e constante dielétrica , a admitância
pode ser obtida por meio de (2.12) e do inverso de (2.10), sendo expressa por
0 00
1g g gj k j k j k j C
R
Y . (2.13)
Como pode ser observado em (2.13), a admitância Y corresponde à
associação em paralelo de um resistor de resistência 1 / ( )gR k com um capacitor
de capacitância 0gC k (HALLIDAY; RESNICK; WALKER, 2009, p. 114 e 149).
Ou seja, fica evidente que a impedância de um fluido pode ser representada pela
associação de um resistor e um capacitor em paralelo.
2.2.3 Modelo Quase Estático do Campo Elétrico
A seguir será apresentado um resumo sobre os modelos eletroestático e quase
estático do campo elétrico, que foram utilizados nas simulações por elementos finitos.
O comportamento de campos elétricos e magnéticos na matéria é descrito pelas
quatro equações de Maxwell, que estão apresentadas abaixo na sua forma diferencial
(VAZ, 2006, p. 156). Na ordem em que aparecem, as equações (2.14) a (2.17) também
podem ser referenciadas como: lei de Maxwell-Ampère, lei de Faraday, e leis elétrica e
magnética de Gauss.
,, ,
D r tH r t J r t
t
(2.14)
,,
B r tE r t
t
(2.15)

28
, ,D r t r t
(2.16)
, 0B r t
(2.17)
As grandezas eletromagnéticas presentes nas equações de Maxwell são:
E
Intensidade de campo elétrico (V/m)
D
Campo de deslocamento elétrico ou densidade de fluxo elétrico (C/m²)
H
Intensidade de campo magnético (A/m)
B
Densidade de fluxo magnético (T)
J
Densidade de corrente (A/m²)
Densidade de carga elétrica (C/m³)
A partir das leis de Ampère (2.14) e de Gauss (2.16) é possível a obtenção da
equação (2.18), chamada de lei de conservação da carga (HAUS; MELCHER, 1989, p.
1.27).
,, 0
r tJ r t
t
(2.18)
Há uma interdependência entre as equações de Ampère (2.14) e Faraday
(2.15), uma vez que o campo de deslocamento elétrico D
é função do campo elétrico
E
, e a densidade de fluxo B
é função da intensidade de campo magnético H
. Isso
faz com que exista um acoplamento entre os campos elétrico e magnético que é
responsável pela existência das ondas eletromagnéticas. Caso o período de oscilação
de um campo magnético ou elétrico seja muito superior ao tempo que uma onda
eletromagnética leva para percorrer uma região de interesse, o acoplamento entre os
campos pode ser desconsiderado, dando origem aos modelos quase estáticos. Neste
caso, o campo elétrico pode ser descrito pelo caso elétrico da lei de Gauss em
conjunto com uma versão simplificada da lei de Faraday (HAUS; MELCHER, 1989,
p. 3.11). As duas leis foram reescritas nas equações (2.19) e (2.20). A partir de agora,
os símbolos das variáveis representarão fasores. Logo, a indicação da dependência
temporal foi removida das equações. A equação (2.18) na forma fasorial foi escrita em
(2.21).

29
D r r
(2.19)
0E r
(2.20)
0J r j r
(2.21)
De acordo com (2.20), no caso quase estático, o campo elétrico é irrotacional.
Campos vetoriais irrotacionais podem ser representados por campos escalares. Isso é
feito com o campo elétrico por meio da equação (2.22), onde V é o potencial elétrico,
dado em volts (HAUS; MELCHER, 1989, p. 4.5).
E r V r
(2.22)
As densidades de fluxo elétrico e de corrente podem ser escritas em função do
campo elétrico por meio de relações constitutivas. Para meios eletricamente lineares e
isotrópicos, a densidade de fluxo pode ser representada por (2.23), onde r
é a
constante dielétrica do meio. Já a densidade de corrente, pode ser determinada por
(2.24), onde r
é a condutividade do meio.
0D r r E r
(2.23)
J r r E r
(2.24)
Em dielétricos lineares e sem perdas, as equações (2.22), (2.23) e (2.19)
podem ser agrupadas dando origem à (2.25), que é uma forma da equação de Poisson.
Esta é a equação que descreve o modelo eletroestático. Por ser linear, ela permite a
aplicação do teorema da superposição.
0 r V r r
(2.25)
Para meios com perdas, ao invés do modelo eletrostático, deve ser utilizado o
modelo elétrico quase estático. Para obtenção da equação que o representa, a
densidade de carga de (2.19) e as relações constitutivas de (2.23) e (2.24) são
substituídas em (2.21). Após a representação do campo elétrico por (2.22), obtém-se

30
(2.26). Dividindo-se os dois lados de (2.26) por j , obtém-se (2.27). É interessante
notar que a equação (2.27) equivale à (2.25) quando 0r
e a constante dielétrica
é substituída pela permissividade relativa complexa, definida em (2.12).
0 0r j r V r
(2.26)
0 0r
r j V r
(2.27)
Como todas as simulações serão realizadas para escoamentos do tipo ar-água,
e a condutividade da água só é desprezível quando a mesma é deionizada, o modelo
elétrico quase estático será utilizado sempre que possível. O modelo eletrostático será
utilizado apenas nos casos onde os recursos computacionais forem um limitante.
2.2.4 Amplificadores Operacionais
Amplificadores operacionais são componentes integrados que terão um papel
fundamental no circuito de medição da capacitância dos eletrodos. Devido a isso, é
importante a demonstração de alguns conceitos sobre seu funcionamento.
Figura 3 – Representação esquemática de um amplificador operacional.
Na Figura 3 pode ser visto o símbolo de um amplificador operacional, que
possui duas entradas de alta impedância, NV e PV (também chamadas de entrada
inversora e não inversora), e uma saída, SV . Além disso, por serem componentes
ativos, os amplificadores necessitam de dois sinais de alimentação que são ligados aos
pinos V e V . O sinal de saída SV (em malha aberta) é dado pela equação (2.28),
onde VA é o ganho em malha aberta do amplificador. Para baixas frequências, o
V
V
SVNV
PV

31
ganho VA costuma ser da ordem de centenas de milhares de vezes, no entanto, a
partir de uma dada frequência, ele diminui.
( )S P N VV V V A (2.28)
A dependência do ganho VA com a frequência pode ser modelada pela
equação (2.29), sendo 0VA o ganho para baixas frequências e c a frequência de
corte, onde o módulo do ganho é reduzido de um fator de 2 . Uma ilustração da
relação do ganho em malha aberta com a frequência é dada pela Figura 4. Quando
c , o decréscimo do ganho é proporcional ao aumento da frequência. Já quando
c , o ganho pode ser aproximado por 0VA (PERTENCE JR, 2012, p. 21)
0
1
VV
c
AA
j
(2.29)
Figura 4 – Representação do módulo do ganho em malha aberta de um amplificador operacional.
Eixos em escala logarítmica.
Amplificadores operacionais são normalmente operados em malha fechada.
Dessa forma, por meio da adição de alguns componentes passivos podem ser obtidos
circuitos com um ganho ajustável. Isso é mostrado na Figura 5, onde FZ e SZ são as
impedâncias de componentes passivos, como capacitores, resistores, ou mesmo
eletrodos.
|Av|
Frequência
AV0
1 wc UGBW
frequência de ganho unitário
ganho de baixa frequência
frequência de corte
wc=UGBW/AV0
w

32
Figura 5 – Amplificado operacional com adição de componentes passivos. Amplificador inversor.
Devido à alta impedância das entradas NV e PV , a corrente drenada pelas
mesmas pode ser desconsiderada. Dessa forma, as corrente que fluem através de SZ e
FZ devem ser iguais. Ou seja, / /E N S N S FV V Z V V Z . Com base nisso e na
equação (2.28), o ganho resultante do circuito (ganho em malha fechada) é dado por:
S F VVMF
E F S S V
V Z AA
V Z Z Z A
. (2.30)
Quando S V F SZ A Z Z , o ganho em malha fechada pode ser reduzido
para
FVMF
S
ZA
Z . (2.31)
Além disso, a equação (2.28) pode ser reescrita como
( ) 0SP N
V
VV V
A . (2.32)
Na prática, a tensão de saída SV do amplificador é limitada por sua tensão
de alimentação, sendo muito pequena em relação ao ganho em malha aberta VA .
Devido a isso, as tensões nas entradas inversora e não inversora são aproximadamente
iguais. Como no circuito da Figura 5 a entrada PV está aterrada, pode-se dizer que
existe um terra virtual na entrada NV , uma vez que sua tensão será nula sem que
haja conexão direta com o conector de terra. Este circuito servirá de base no
desenvolvimento do sensor capacitivo e o conceito de terra virtual lhe dará imunidade
à interferência de capacitâncias parasitas.
FZ
SZEV NV
PVSV

33
2.3 TÉCNICAS DE MEDIÇÃO DE FRAÇÃO DE VAZIO
Na medição de fração de vazio em escoamentos bifásicos é comum o uso de
separadores de fase, para que cada fase seja medida isoladamente. Como a separação
das fases é um processo lento, o uso de separadores não permite a visualização de
alguns fenômenos dinâmicos do escoamento. Além disso, separadores bifásicos
industriais podem ter massa superior a cinco toneladas e ocupar volumes da ordem de
trinta mil litros (ROSS; STOBIE, 2010). Como alternativa a eles, surgiram técnicas
de medição baseadas em ultrassom, raios x, raios g, micro-ondas, métodos óticos e
impedância elétrica, que vêm sendo desenvolvidas para uso industrial ou acadêmico.
Uma breve revisão de cada uma dessas técnicas será realizada a seguir.
2.3.1 Ultrassom
Quando uma onda ultrassônica atinge uma interface entre dois materiais
diferentes pode ocorrer a reflexão, transmissão, difração e espalhamento da onda. A
ocorrência de cada um destes fenômenos está relacionada com características físicas
dos materiais que formam a interface, como densidade e módulo de elasticidade. Além
disso, a velocidade de propagação e a atenuação da onda dependem do meio onde ela
se propaga (HOYLE, 1996). Estes fatores podem ser explorados no desenvolvimento
de medidores ultrassônicos.
Dispondo-se vários transdutores de ultrassom ao redor de um duto, é possível
a obtenção de imagens tomográficas de sua seção transversal e consequentemente da
fração de vazio. Hoyle (1996) fez uma revisão sobre técnicas de tomografia
ultrassônica. Como na prática as ondas se dispersam devido a interfaces irregulares e
reflexões múltiplas, a qualidade das imagens obtidas é inferior a de tomógrafos
baseados em raios x. A resolução espacial dos sistemas de ultrassom é dada pelo
comprimento da onda utilizada. Para um transdutor de 1 MHz, considerando-se que a
onda se propaga dentro da água, o comprimento será de aproximadamente 1,5 mm.
Além disso, a frequência de amostragem é limitada pelo tempo de trânsito da onda no
fluido.
Em escoamentos de bolhas dispersas, utilizando-se um único emissor, as
intensidades das ondas transmitidas, refletidas e dispersas podem ser medidas e

34
correlacionadas com a fração de vazio. Uma das principais vantagens dos sensores de
ultrassom é que os mesmos podem ser utilizados de forma não invasiva. No entanto,
como a reflexão em interfaces gás-líquido é quase completa, as aplicações não
invasivas se restringem a situações onde a fase gasosa esteja dispersa em uma fase
líquida contínua (ASHER, 1983) e a fração de vazio seja inferior a 20 % (WARSITO
et al., 1999). Além disso, os sensores de ultrassom para medição de fração de vazio
precisam ser ajustados empiricamente.
2.3.2 Raios x
Inicialmente os sistemas de tomografia computadorizada baseados em raios x
foram desenvolvidos para aplicações na área médica, onde não havia um compromisso
com a velocidade de medição, que era limitada pela movimentação mecânica dos
emissores. Devido a isso, nos sistemas convencionais era possível apenas a medição da
média temporal da fração de vazio na seção transversal do escoamento (HAMPEL et
al., 2005). Esta limitação pode ser superada com o uso de diversos emissores e
receptores estacionários, permitindo amostragens de até 2000 imagens por segundo
(HORI et al., 2000). Outra técnica, que utiliza uma única fonte de elétrons e um
defletor para controle eletrônico da direção de emissão da radiação, é capaz de medir
até 10000 quadros por segundo (BIEBERLE et al., 2010).
Os tomógrafos por raios x possuem resoluções espaciais da ordem de 1 mm².
Apesar de suas vantagens, os sistemas de raios x são limitados pela necessidade de
cuidados especiais devido ao uso de radiação ionizante e possuem custo elevado.
2.3.3 Raios g
Sempre que um feixe de raios g atravessa algum material, ele é atenuado.
Para feixes de baixa energia, essa atenuação depende do número atômico dos
elementos sobre os quais há incidência dos raios. Por outro lado, para feixes de alta
energia, essa atenuação é aproximadamente proporcional à densidade da região
atravessada. Como o último caso é o mais comum, a medida da atenuação de raios g

35
é muitas vezes chamada de densitometria g (THORN; JOHANSEN; HJERTAKER,
2013, p. 8). A medição simultânea da radiação g em dois níveis de energia distintos
permite que essa técnica seja utilizada em escoamentos trifásicos (HOFFMANN;
JOHNSON, 2011).
Uma das principais diferenças entre medições com raios x e raios g está na
energia da radiação, que costuma ser maior no segundo caso. Isso possibilita que os
raios g penetrem materiais com maior facilidade e sejam utilizados em locais
impróprios para os raios x, como em dutos de espessuras ou diâmetros elevados
(IAEA, 2008, p. 5). Além da radiação g ser ionizante, ela requer o uso de
radioisótopos, que são materiais de uso restrito em alguns países, sendo essa uma
desvantagem desta técnica em relação à técnica de raios x, que podem ser gerados por
filamentos de tungstênio (THORN; JOHANSEN; HJERTAKER, 2013, p. 14). Além
disso, os emissores de radiação g não podem ser desligados eletricamente como os de
raios x.
A radiação g pode ser utilizada tanto para medições da fração de vazio média
da seção transversal do escoamento, como de uma corda qualquer (FALCONE;
HEWITT; ALIMONTI, 2009, p. 61, 66). Além disso, a fração de vazio local pode ser
obtida por meio de métodos tomográficos, com resoluções da ordem de 4 mm²
(BIEBERLE et al., 2013). O tempo de aquisição dos medidores por radiação g é
elevado, sendo que o tomógrafo g mais rápido que foi encontrado atinge taxas de até
30 quadros por segundo (JOHANSEN et al., 1996).
2.3.4 Micro-ondas
Micro-ondas são radiações eletromagnéticas situadas numa faixa de
frequências abaixo das ondas de infravermelho, definida por alguns autores entre
300 MHz e 300 GHz. Os sensores de micro-ondas utilizados para caracterização de
escoamentos podem ser classificados em dois tipos, os de ressonância e os de
transmissão (NYFORS; VAINIKAINEN, 1994).
Nos sensores de transmissão, uma onda emitida por uma antena transmissora
é detectada por uma antena receptora após atravessar o escoamento, sendo atenuada
e sofrendo mudança de fase. A atenuação e a mudança de fase estão relacionadas com
a permissividade elétrica equivalente da mistura que compõe o escoamento, donde

36
pode ser obtida uma estimativa da fração de vazio. Uma dificuldade nestes sensores é
a reflexão de ondas dentro da tubulação, que pode interferir nos resultados
(WALDSCHMIDT, 2008, p. 96).
Caso parte de uma tubulação seja envolvida por um material condutor, pode
ser formada uma cavidade ressonante. Micro-ondas podem ser inseridas nesta
cavidade por meio de uma antena. Dependendo das dimensões da cavidade e da
permissividade elétrica do fluido no interior da mesma, as ondas poderão entrar ou
não em ressonância, o que é detectável por outra antena. Este é o princípio de
funcionamento dos sensores de ressonância (WYLIE; SHAW; AL-SHAMMA’A,
2006a). Fazendo uma varredura em frequência do sinal injetado, são obtidas respostas
que por indicarem a permissividade da mistura, representam a fração de vazio no
escoamento (WYLIE; SHAW; AL-SHAMMA’A, 2006b). Uma das dificuldades deste
método é que as respostas variam com a salinidade da água (BO; NYFORS, 2002).
Além disso, o padrão de escoamento interfere nos resultados (SCUSSIATO, 2010, p.
55, 89).
O desenvolvimento de tomógrafos baseados em micro-ondas é possível, porém
limitado pelos custos e dificuldades da operação em altas frequências. Além disso, a
reconstrução das imagens costuma ser demorada (WU et al., 2009).
2.3.5 Métodos Óticos
Medidores óticos podem fazer uso de luz visível, infravermelha, ou
ultravioleta e serão divididos em dois grupos principais: os baseados na absorção e os
baseados na refração da luz, embora outros princípios físicos também possam ser
explorados, como fluorescência, espalhamento Raman e espectroscopia
(SCHLEICHER et al., 2008).
Por meio de fibras óticas ou hastes de vidro, podem ser desenvolvidas sondas
intrusivas para medição de fração de vazio local. Um feixe de radiação é transmitido
por fibras óticas até atingir uma terminação de vidro, colocada em contato com o
escoamento. De acordo com a lei de Snell, dependendo dos índices de refração do
vidro e do fluido, poderá haver ou não reflexão total dos raios que incidem sobre a
interface. A luz refletida retorna até um fotodetector (JONES; DELHAYE, 1976). Ou
seja, as fases são identificadas pela reflexão ou não da luz na interface entre a sonda e
o fluido. Resoluções de 50 µm podem ser obtidas (BOYER; DUQUENNE; WILD,

37
2003, p. 3197).
Instalando-se janelas em tubulações, podem ser desenvolvidos sistemas não
intrusivos, onde a fração de vazio é estimada com base na atenuação de radiação
transmitida através do escoamento (fases diferentes absorvem a luz de forma
diferente). A desvantagem destes sistemas é que para determinados valores de fração
de vazio a absorção pode ser total ou o desvio da luz pode ser muito grande,
aumentando os erros de medição. Em escoamentos água-óleo, sensores baseados em
infravermelho podem atingir erros absolutos de apenas 1,5 %, desde que a fração de
água seja de pelo menos 80 %. Fora deste limite, os erros podem chegar a 20 %
(FALCONE; HEWITT; ALIMONTI, 2009, p. 97).
Sensores óticos também podem ser empregados no desenvolvimento de
tomógrafos. Já foram desenvolvidos sistemas com resoluções temporais e espaciais de
cerca de 4500 quadros por segundo e 2 mm (SCHLEICHER et al., 2008). No entanto,
os tomógrafos óticos também são limitados para uso em baixas frações de
vazio (15 %).
O escoamento também pode ser analisado por meio de câmeras de alta
velocidade. Alguns modelos comerciais possuem taxas de aquisição de até 12500
quadros por segundo com resoluções de um megapixel (PHOTRON, 2013),
permitindo a visualização de rápidas oscilações. Além disso, parâmetros
característicos do escoamento podem ser extraídos das filmagens por meio de técnicas
de processamento digital de imagens (DO AMARAL et al., 2013).
2.3.6 Impedância Elétrica
Caso existam diferenças entre as permissividades ou condutividades das fases
de um escoamento, é possível a medição da fração de vazio por meio de sensores de
impedância. Os mesmos podem ser classificados em capacitivos, quando sensíveis a
variações na constante dielétrica, ou resistivos, quando sensíveis à condutividade. A
principal desvantagem dos sensores resistivos é sua maior sensibilidade a variações
nas características iônicas dos escoamentos (SHU; WEINBERGER; LEE, 1982). A
medição da impedância é feita por meio de eletrodos, que podem ser invasivos ou não.
Os primeiros medidores baseados em impedância surgiram a mais de 40 anos,
sendo suas principais vantagens o baixo custo e a alta velocidade de medição
(FALCONE; HEWITT; ALIMONTI, 2009, p. 54-56). Uma dificuldade é a

38
dependência da resposta destes sensores com variações no padrão de escoamento.
Junto com os sensores baseados em raios g, os sensores de impedância são os mais
utilizados comercialmente (THORN; JOHANSEN; HJERTAKER, 2013, p. 9).
Embora precisem estar em contato com o escoamento, os sensores resistivos
podem fazer uso de eletrodos colocados na parede interna do tubo, sendo
praticamente não intrusivos. Testes com eletrodos em anel apresentaram boa
linearidade para diversos padrões de escoamento (SHI; DONG; TAN, 2009). Estudos
comparativos (FOSSA, 1998) e de aprimoramento geométrico dos principais tipos de
eletrodo existentes já foram realizados (DEVIA; FOSSA, 2003).
Medições de fração de vazio locais podem ser realizadas por meio de sondas
agulha, consistindo de dois condutores que tem suas extremidades colocadas em
contato com o escoamento. O diâmetro destas sondas pode chegar a 12 µm (BOYER;
DUQUENNE; WILD, 2003, p. 3197). A inserção de dois fios paralelos atravessando a
seção transversal da tubulação dá origem a outro tipo de sensor invasivo. O sensor de
fios paralelos permite a obtenção da altura de líquido dentro do duto e possui uma
resposta linear, sendo útil em regimes de escoamento anular (MIYA;
WOODMANSEE; HANRATTY, 1971).
Os sensores de impedância do tipo capacitivo podem ser não intrusivos.
Diversos tipos de eletrodos foram desenvolvidos buscando-se o aumento na
sensibilidade dos mesmos (CHUN; SUNG, 1986). Dispondo-se vários eletrodos ao
redor do duto é possível a obtenção de imagens tomográficas do escoamento (YANG
et al., 2011). No entanto, a resolução deste tipo de tomógrafo é limitada, pois os
sinais medidos são funções não lineares da distribuição de fração de vazio no
escoamento (BOYER; DUQUENNE; WILD, 2003, p. 11). Outro tipo de tomógrafo
(invasivo, porém pouco intrusivo), pode ser obtido inserindo duas malhas de
condutores paralelos na seção transversal de um tubo, em planos ligeiramente
separados. Este tipo de sensor, denominado wire-mesh, possibilita a medição com
resoluções da ordem de 2 mm (DA SILVA, 2008, p. 67).
2.3.7 Considerações
Foram apresentadas algumas das principais técnicas para medição de fração
de vazio. Embora os resultados das técnicas baseadas em raios x e raios g sejam
muito bons, o uso de radiação ionizante e os altos custos são um empecilho para que
39
elas sejam estudadas e utilizadas. Dentre as técnicas mais simples, as baseadas em
ultrassom e em sensores óticos possuem maiores restrições quanto à faixa de fração de
vazio em que podem ser aplicadas. Tanto a técnica de impedância elétrica quanto a
de micro-ondas medem a fração de vazio com base na permissividade elétrica do
escoamento. Por ser baseada em frequências abaixo da faixa de micro-ondas, a técnica
de impedância possui como vantagens a simplicidade e o custo reduzido. Dentro dos
sensores de impedância optou-se por um sensor capacitivo, pela possibilidade de um
projeto não invasivo.
2.4 SENSORES CAPACITIVOS
A seguir será apresentada uma revisão sobre sensores capacitivos não
intrusivos utilizados para medição de fração de vazio em dutos. Primeiramente, será
apresentada uma breve explicação sobre o funcionamento dos sensores capacitivos por
meio de um modelo elétrico simplificado. Posteriormente, serão vistos os principais
arranjos de eletrodo existentes e suas vantagens. Por fim, serão mostrados alguns
circuitos eletrônicos que podem ser utilizados.
2.4.1 Modelo Simplificado
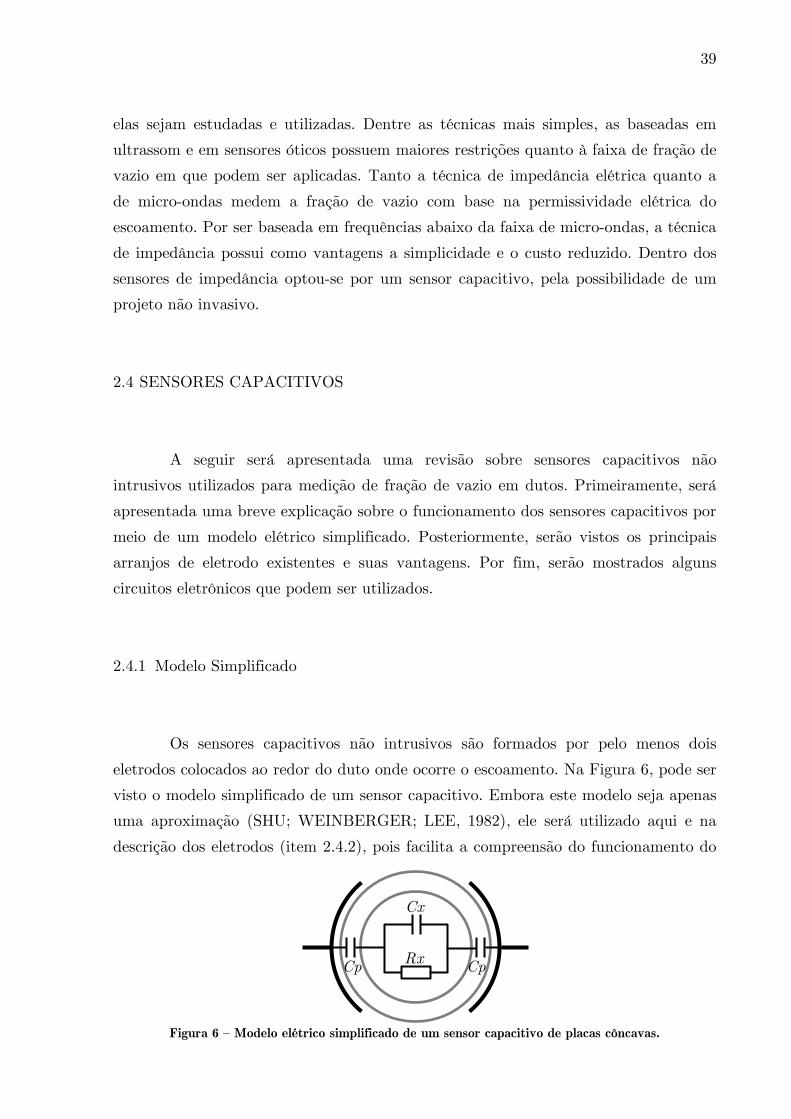
Os sensores capacitivos não intrusivos são formados por pelo menos dois
eletrodos colocados ao redor do duto onde ocorre o escoamento. Na Figura 6, pode ser
visto o modelo simplificado de um sensor capacitivo. Embora este modelo seja apenas
uma aproximação (SHU; WEINBERGER; LEE, 1982), ele será utilizado aqui e na
descrição dos eletrodos (item 2.4.2), pois facilita a compreensão do funcionamento do
Figura 6 – Modelo elétrico simplificado de um sensor capacitivo de placas côncavas.
Cx
RxCp Cp

40
sensor. Além disso, este é um modelo amplamente empregado (CHUN; SUNG, 1986;
DEMORI et al., 2010; ISMAIL; AHMED, 2008; THORN; JOHANSEN;
HJERTAKER, 2013) que pode fornecer bons resultados (SHU; WEINBERGER;
LEE, 1982).
Com base na Figura 6, a impedância entre os dois eletrodos será dada pelo
circuito equivalente composto por Cp , Cx e Rx . Neste circuito, Cp corresponde à
capacitância da parede do tubo (que deve ser constituído de material não condutivo),
enquanto Cx e Rx são a capacitância e a resistência equivalentes do fluido.
Caso o fluido seja não condutivo, a resistência Rx terá valor próximo a
infinito, podendo ser ignorada. Assim, a capacitância do sensor equivalerá à
capacitância do fluido em série com as capacitâncias da parede.
Na prática, quando há uma fase contínua de água, essa simplificação não
pode ser feita. No entanto, a impedância de Cx decresce com a frequência. Assim,
caso seja aplicado um sinal de alta frequência nos eletrodos, a impedância de Cx
poderá ser muito menor que a resistência Rx . Nesta condição, a simplificação volta a
ser válida.
Existe um limite para o aumento da frequência de medição, que é dado pelo
circuito eletrônico utilizado. Assim, para valores de condutividade do fluido muito
altos, a resistência Rx poderá se comportar como um curto-circuito, impedindo a
medição da capacitância Cx .
2.4.2 Arranjos de Eletrodos
Diversos tipos de eletrodos para sensores capacitivos já foram desenvolvidos
(GREGORY; MATTAR, 1973). Serão apresentados aqui apenas os arranjos de placas
côncavas, em anel e helicoidais.
Eletrodo de placas côncavas. São constituídos de duas placas condutivas
semicilíndricas posicionadas uma de frente para a outra ao redor do duto, na seção de
medição. Uma representação esquemática é dada pela Figura 7.
Quanto maior for o ângulo e o comprimento l do eletrodo, maior será a
área das placas, e consequentemente, a sensibilidade do sensor (ISMAIL; AHMED,
2008). No entanto, quando a se aproximar de 180°, mais intenso o campo elétrico
será na região onde os eletrodos estão mais próximos um do outro, piorando a

41
uniformidade da resposta espacial (STRAZZA et al., 2011). Além disso, um aumento
no comprimento do sensor limita o tamanho das oscilações ou bolhas que ele será
capaz de detectar.
Figura 7 – Representação esquemática e corte da seção transversal de eletrodo de placas côncavas.
Na Figura 8 pode ser visto o circuito elétrico equivalente do sensor para dois
escoamentos estratificados onde as fases são não condutivas, com o eletrodo orientado
de formas diferentes em relação ao escoamento. Na primeira representação, a
capacitância do fluido pode ser dada pela soma das capacitâncias 1C e 2C , que estão
em paralelo. Já no segundo caso, 1C e 2C estão em série e a capacitância equivalente
é dada por 1 2 1 2/ ( )C C C C . Isso mostra o quanto este tipo de eletrodo é sensível a
variações na distribuição das fases e consequentemente, no padrão de escoamento.
Figura 8 – Eletrodo de placas côncavas orientado de duas formas diferentes em relação ao escoamento.
A resposta deste tipo de eletrodo não é linear. Isso fica claro se for observada
a existência da capacitância Cp da parede do tubo em série com a capacitância do
fluido. Além disso, as extremidades dos dois eletrodos ficam mais próximas umas das
outras do que o centro. Para escoamentos estratificados, a resposta dos eletrodos pode
ser linearizada por meio de alterações em seu perfil. Isso é possível com a redução da
largura dos eletrodos na região onde eles estão mais próximos e o campo elétrico é
mais intenso (TEYSSEDOU; TYE, 1999).
1C
2C
2C1CpC pCpC pC

42
Eletrodo em Anel. Dois anéis podem ser utilizados como eletrodos quando
colocados em seções próximas de um duto não condutivo. Isso está ilustrado na
Figura 9. Com o uso dos eletrodos em anel, o campo elétrico assume uma distribuição
axial dentro do escoamento, sendo mais intenso nas bordas do tubo do que em seu
centro (ISMAIL; AHMED, 2008). De acordo com Ahmed e Ismail, quanto menor a
distância d entre os dois anéis, maior a sensibilidade, o que possibilita uma maior
resolução espacial em relação ao eletrodo de placas côncavas. No entanto, não foram
encontrados estudos sobre os efeitos de alterações na largura dos eletrodos e sobre a
relação da distância d com a homogeneidade do campo elétrico.
Figura 9 – Geometria do Eletrodo em Anel.
Devido à disposição axial do campo elétrico no interior da tubulação, num
possível circuito equivalente deste tipo de sensor, a capacitância do tubo ficaria em
paralelo com a capacitância do fluido. Essa é uma vantagem que faz com que este
tipo de sensor tenha uma resposta mais linear. Em testes estáticos comparando
eletrodos em anel e de placas côncavas, para escoamento estratificado, isso fica
evidente (CHUN; SUNG, 1986).
Eletrodo Helicoidal. Uma opção para a redução da dependência da resposta
dos sensores capacitivos com o padrão de escoamento é o uso de eletrodos helicoidais
(THORN; JOHANSEN; HJERTAKER, 2013, p. 9). A Figura 10 mostra a
representação esquemática de um eletrodo deste tipo. Ele é formado por dois
condutores em forma de helicoide que são dispostos no tubo de modo que na seção
transversal do mesmo, um esteja de frente pro outro.
A distância d representa o passo da espiral. Quanto maior o passo, menor
será o ângulo a, na seção transversal do eletrodo. Para minimização de efeitos de
borda, os eletrodos podem ser separados por outros dois eletrodos de guarda.
(GERAETS; BORST, 1988). Simulações mostram as melhorias do uso de eletrodos de
guarda na sensibilidade espacial deste tipo de sensor (YE et al., 2011). Para que a
sensibilidade dos eletrodos helicoidais seja equiparável a de outros tipos de eletrodos,
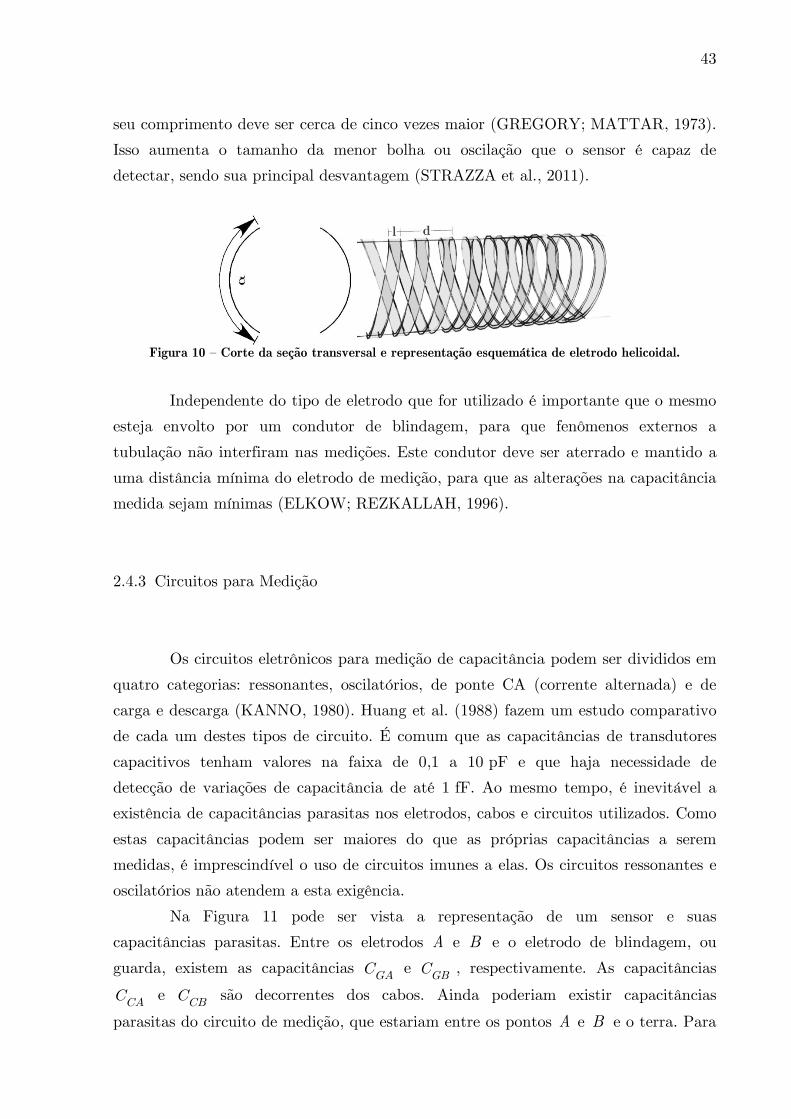
43
seu comprimento deve ser cerca de cinco vezes maior (GREGORY; MATTAR, 1973).
Isso aumenta o tamanho da menor bolha ou oscilação que o sensor é capaz de
detectar, sendo sua principal desvantagem (STRAZZA et al., 2011).
Figura 10 – Corte da seção transversal e representação esquemática de eletrodo helicoidal.
Independente do tipo de eletrodo que for utilizado é importante que o mesmo
esteja envolto por um condutor de blindagem, para que fenômenos externos a
tubulação não interfiram nas medições. Este condutor deve ser aterrado e mantido a
uma distância mínima do eletrodo de medição, para que as alterações na capacitância
medida sejam mínimas (ELKOW; REZKALLAH, 1996).
2.4.3 Circuitos para Medição
Os circuitos eletrônicos para medição de capacitância podem ser divididos em
quatro categorias: ressonantes, oscilatórios, de ponte CA (corrente alternada) e de
carga e descarga (KANNO, 1980). Huang et al. (1988) fazem um estudo comparativo
de cada um destes tipos de circuito. É comum que as capacitâncias de transdutores
capacitivos tenham valores na faixa de 0,1 a 10 pF e que haja necessidade de
detecção de variações de capacitância de até 1 fF. Ao mesmo tempo, é inevitável a
existência de capacitâncias parasitas nos eletrodos, cabos e circuitos utilizados. Como
estas capacitâncias podem ser maiores do que as próprias capacitâncias a serem
medidas, é imprescindível o uso de circuitos imunes a elas. Os circuitos ressonantes e
oscilatórios não atendem a esta exigência.
Na Figura 11 pode ser vista a representação de um sensor e suas
capacitâncias parasitas. Entre os eletrodos A e B e o eletrodo de blindagem, ou
guarda, existem as capacitâncias GAC e GBC , respectivamente. As capacitâncias
CAC e CBC são decorrentes dos cabos. Ainda poderiam existir capacitâncias
parasitas do circuito de medição, que estariam entre os pontos A e B e o terra. Para

44
simplificação, todas as capacitâncias indesejáveis do ponto A e do ponto B serão
representadas, respectivamente, por PAC e PBC .
Figura 11 – Capacitâncias parasitas em um sensor capacitivo.
Yang (1996) fez um comparativo entre os circuitos baseados em carga e
descarga e em corrente alternada. A principal vantagem de ambos os circuitos é a
alta imunidade a capacitâncias parasitas. Os mesmos serão apresentados a seguir.
Circuito de Carga e Descarga. O ciclo de funcionamento do circuito
apresentado na Figura 12 se dá em duas fases. Na primeira fase, as chaves 1Ch e 2Ch
são fechadas, de forma que flui uma corrente por SC e pela resistência de
realimentação R do amplificador operacional 1. No final deste período, SC estará
carregado com o valor da tensão de alimentação V . Na outra fase, apenas as chaves
3Ch e 4Ch são mantidas fechadas. Dessa forma, SC descarregará, fluindo uma
corrente reversa pelo resistor de realimentação do amplificador 2.
A saída dos amplificadores 1 e 2 será igual ao produto de sua resistência de
realimentação pela corrente passando por ela. Logo, durante a carga do capacitor,
surgiria um pico negativo na saída 1V , e durante a descarga, um pico igual e positivo
na saída 2V . Devido aos capacitores nas entradas dos operacionais, estes picos são
filtrados e a saída SV será um sinal de baixa frequência proporcional à capacitância
SC e a frequência de chaveamento utilizada (YANG, 1996).
Neste circuito, a capacitância parasita PAC estará sempre ligada diretamente
na tensão de alimentação ou aterrada, não interferindo nas medições. Já a
capacitância PBC estará sempre conectada ao terra virtual de um dos dois
amplificadores operacionais. Logo, este circuito pode ser considerado imune a
capacitâncias parasitas. Uma desvantagem do mesmo é o erro de injeção de carga
proveniente das chaves analógicas. A topologia diferencial reduz, mas não elimina
A BSC
GAC GBC
CAC
CBC
CAC GAC GBC CBC
SC
A B

45
este problema. Na análise feita por Yang (1996), o fluido é considerado não
condutivo. Quando isso não for verdade, o eletrodo deixa de ser representado apenas
pela capacitância SC e o funcionamento do circuito fica comprometido.
Figura 12 – Circuito de carga e descarga.
Circuito Baseado em Corrente Alternada. O circuito da Figura 13 é formado
por um amplificador cujo ganho depende da capacitância a ser medida, sendo um
exemplo de circuito baseado em corrente alternada. Conforme visto na seção 2.4.1,
para frequências da ordem de mega-hertz e fluidos de baixa condutividade, os
eletrodos tem comportamento puramente capacitivo. Assim, a representação dada
pela Figura 13 é válida apenas para um sinal EV nesta faixa de frequências, onde o
eletrodo é representado por SC e suas capacitâncias parasitas. A capacitância PAC ,
em conjunto com a impedância interna da fonte EV , formará um filtro passa-baixa.
No entanto, para uma fonte com impedância da ordem de dezenas de ohms, a
frequência de corte será muito alta (centenas de mega-hertz), não interferindo no
sinal de entrada EV . Já a capacitância PBC , pode ser desconsiderada por estar ligada
ao terra virtual do amplificador operacional. Ou seja, caso o amplificador operacional
possa ser considerado ideal na frequência utilizada para medição, o circuito é imune a
capacitâncias parasitas.
Figura 13 – Circuito de medição baseado em corrente alternada.
1
2
Ch1 e Ch2 fechadas Ch3 e Ch4 fechadas
1Ch
3Ch
SC
PACPBC 2Ch
4Ch C
C
R
R
2V
1VSV
V
f: 1 a 10 MHz
EV
SC
PAC PBC
FR
FC
SV

46
Com base na equação (2.31), a saída SV deste circuito pode ser dada por
(considerando-se as simplificações que eliminam PAC e PBC )
1
1 1
F
F F F S FS E E E
S F F
S
R
Z j C R j C RV V V V
Z j C Rj C
. (2.33)
O resistor FR é necessário para evitar problemas de deriva de saída do
amplificador operacional (PEYTON; WALSH, 1993). Para 1F FC R (por
exemplo, 2 5 4,7 1 147,7 1M p M ) a equação (2.33) é reduzida a
SS E
F
CV V
C . (2.34)
Assim, comparando-se as amplitudes dos sinais de entrada e de saída, pode
ser obtida a capacitância do eletrodo. Uma análise mais completa deste circuito,
considerando casos onde o eletrodo não seja considerado puramente capacitivo, será
apresentada no desenvolvimento deste trabalho.
2.4.4 Considerações
Inicialmente, foram apresentadas algumas características dos sensores
capacitivos, dentre as quais se destaca a dificuldade de medição quando a principal
fase do escoamento possui alta condutividade. Também foi visto que o problema da
condutividade pode ser mitigado, até certo limite, com o uso de altas frequências nas
medições. Dentre os três tipos de eletrodos estudados, a resposta do helicoidal é
menos dependente do padrão de escoamento. No entanto, sua construção é mais
complexa e as respostas espaciais dos eletrodos em anel e de placas côncavas são
melhores. Dentre os circuitos apresentados, o de carga e descarga possui maior
complexidade devido ao efeito de injeção de carga das chaves analógicas.

47
3 DESENVOLVIMENTO DO SENSOR
Nesta seção será apresentado o desenvolvimento do sistema de medição para
auxílio na análise de escoamentos bifásicos e determinação de fração de vazio.
Inicialmente, será feita uma introdução sobre os módulos que compõe o sistema.
Posteriormente, cada módulo será descrito individualmente.
3.1 DESCRIÇÃO DO SISTEMA
Conforme demonstrado no diagrama da Figura 14, o sistema pode ser
dividido em três partes: o conjunto de eletrodos, colocados ao redor do duto; o
hardware, que detectará as variações na capacitância dos eletrodos; e uma interface
homem máquina (IHM), através da qual o sensor será acessado remotamente por
meio de uma conexão ethernet.
Figura 14 – Diagrama esquemático do sistema de medição.
Foram utilizados eletrodos de placas côncavas, como será descrito na próxima
seção (3.2). O hardware é responsável por gerar um sinal senoidal de excitação, que é
enviado para um dos eletrodos, e medir o sinal resultante, recebido pelo outro
eletrodo. O sinal medido é condicionado e amostrado por um microcontrolador ARM
Cortex-M3. O microcontrolador gerencia alguns parâmetros do circuito e transmite as
medidas por uma interface ethernet. A IHM foi desenvolvida em Java e permite a
Eletrodos Hardware
IHM
mC
Firmware

48
aquisição, assim como visualização em tempo real das medições. Por meio dela
configurações do sensor também podem ser alteradas.
O sistema opera com uma taxa de aquisição de 1 kHz. Além disso, a
frequência do sinal de excitação dos eletrodos pode ser alterada digitalmente numa
faixa entre 100 kHz e 7 MHz.
3.2 ELETRODOS
O sensor desenvolvido foi baseado numa variação de um eletrodo de placas
côncavas apresentada por Hammer (1996). O sensor de placas côncavas convencional
é formado por dois eletrodos iguais e de seção transversal semicircular, um de
excitação e outro de recepção. Como pode ser visto na Figura 15, na mudança
proposta por Hammer (1996) é incluído um eletrodo de guarda de cada lado do
eletrodo de recepção. Eletricamente, os eletrodos de guarda e de recepção serão
mantidos num mesmo potencial. No entanto, a medição será feita apenas no eletrodo
de recepção. Dessa forma a capacitância medida será um pouco menor, mas terá
menos influência do efeito de borda, que ocorre principalmente na região dos
eletrodos de guarda.
Figura 15 – Geometria dos eletrodos utilizados.
O comprimento dos eletrodos de excitação, recepção e guarda deve ser
escolhido com parcimônia, devido ao compromisso entre resolução espacial e
sensibilidade. Neste caso, o comprimento escolhido é igual ao diâmetro externo da
tubulação (32 mm). A decisão baseia-se numa sugestão de Canière et al. (2007). Além
dos eletrodos já mencionados, também foi utilizado um eletrodo de blindagem, para

49
redução de interferências do meio externo. O mesmo possui 40 mm de comprimento e
diâmetro de 42 mm.
Para a montagem do sensor foi utilizada uma fita autoadesiva de cobre. A
fita foi posicionada em uma estrutura feita com etil vinil acetato (EVA) e um tubo de
policloreto de vinila (PVC) de 35 mm de diâmetro interno. Na Figura 16 podem ser
vistos uma foto e um diagrama com as camadas que compõe a estrutura dos
eletrodos. O modo de montagem utilizado permite que o sensor seja tirado e colocado
em qualquer região do tubo com facilidade.
Figura 16 – Foto e diagrama de montagem dos eletrodos.
A conexão com os eletrodos é feita por dois cabos coaxiais. Os eletrodos de
guarda e de blindagem foram conectados às malhas de terra. Já os eletrodos de
excitação e recepção foram conectados ao condutor principal de cada cabo. Uma fita
de velcro foi colada na carcaça do sensor para facilitar a fixação.
3.3 HARDWARE
O hardware do sistema de medição pode ser dividido em três partes: os
módulos microcontrolado, de excitação e de recepção. Cada um dos três módulos será
descrito detalhadamente nas próximas seções. Um diagrama simplificado do hardware
é apresentado na Figura 17. Como pode ser observado, o sistema foi projetado
prevendo futuras medições com dois conjuntos de eletrodos simultaneamente. Na
Figura 18 pode ser vista uma foto da placa de circuito impresso desenvolvida.
Eletrodos
EVA PVC
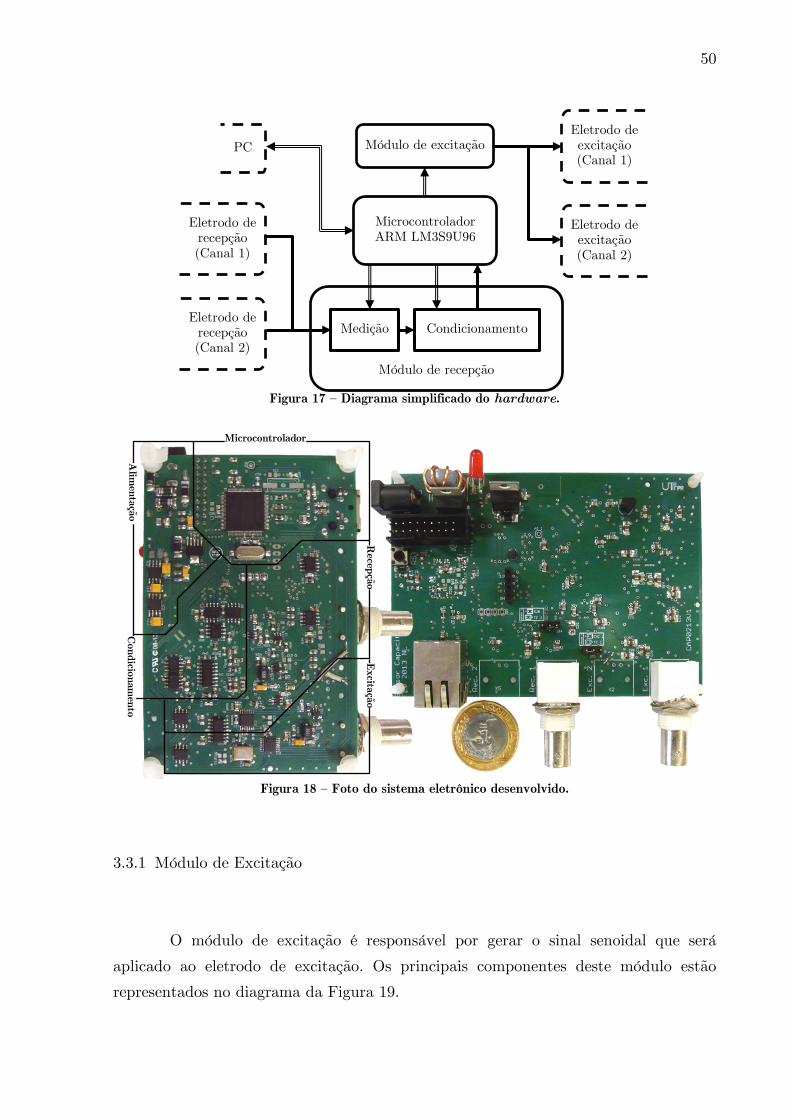
50
Figura 17 – Diagrama simplificado do hardware.
Figura 18 – Foto do sistema eletrônico desenvolvido.
3.3.1 Módulo de Excitação
O módulo de excitação é responsável por gerar o sinal senoidal que será
aplicado ao eletrodo de excitação. Os principais componentes deste módulo estão
representados no diagrama da Figura 19.
Microcontrolador ARM LM3S9U96
Módulo de excitação Eletrodo de excitação (Canal 1)
Eletrodo de excitação (Canal 2)
Módulo de recepção
Medição Condicionamento
Eletrodo de recepção (Canal 1)
Eletrodo de recepção (Canal 2)
PC
Alim
entação C
ondicionamento
Microcontrolador Excitação
Recepção

51
Figura 19 – Diagrama do módulo de excitação.
O sinal senoidal é gerado por meio de um sintetizador digital direto (DDS).
Este componente possui uma tabela da função seno em sua memória interna. Pontos
dessa tabela são acessados sequencialmente e convertidos em um sinal analógico. A
memória não é acessada de forma contígua, mas obedecendo a saltos determinados
pelo usuário. Alterando-se o passo de acesso à tabela, altera-se a frequência do sinal
analógico de saída. O alinhamento de acesso à memória determina a fase do sinal de
saída. O DDS utilizado (AD9832 da Analog Devices) opera com uma frequência de
25 MHz e gera a saída analógica por meio de um conversor digital analógico interno
de 10 bits. A configuração da frequência do sinal gerado é feita pelo microcontrolador,
por meio de uma interface serial do tipo SPI.
A saída do DDS não é uma senóide pura, possuindo uma componente de
corrente contínua (CC) e outra de 25 MHz proveniente da conversão digital
analógica. Devido a isso, a saída passa por um filtro passa-alta de 250 Hz e por um
filtro PI com frequência de corte em 10 MHz. Após o filtro, o sinal ainda é ligado a
um amplificador com baixa impedância de saída.
A amplitude do sinal gerado pelo DDS pode ser configurada por meio de uma
tensão de referência que é gerada através de um potenciômetro digital. O
potenciômetro utilizado possui resolução de 8 bits e é programado pelo
microcontrolador. A amplitude máxima do sinal de excitação é de 9 Vpp.
3.3.2 Módulo de Recepção
O módulo de recepção é responsável por converter a capacitância dos
eletrodos em um sinal de tensão que possa ser amostrado pelo microcontrolador. Uma
representação esquemática é dada pela Figura 20. Um componente fundamental é o
Microcontrolador ARM LM3S9U96
Potenciômetro Digital
DDS Sintetizador
Digital Filtros
Eletrodo de excitação (Canal 1)
Eletrodo de excitação (Canal 2)
Ganho
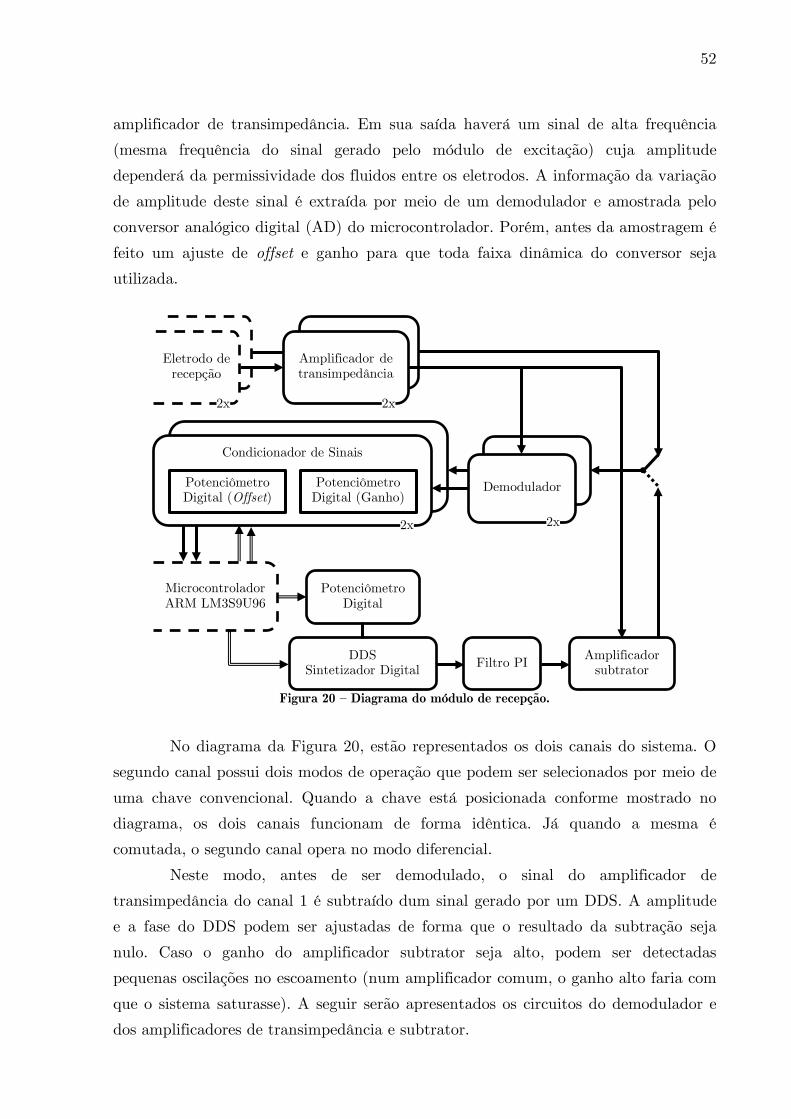
52
amplificador de transimpedância. Em sua saída haverá um sinal de alta frequência
(mesma frequência do sinal gerado pelo módulo de excitação) cuja amplitude
dependerá da permissividade dos fluidos entre os eletrodos. A informação da variação
de amplitude deste sinal é extraída por meio de um demodulador e amostrada pelo
conversor analógico digital (AD) do microcontrolador. Porém, antes da amostragem é
feito um ajuste de offset e ganho para que toda faixa dinâmica do conversor seja
utilizada.
Figura 20 – Diagrama do módulo de recepção.
No diagrama da Figura 20, estão representados os dois canais do sistema. O
segundo canal possui dois modos de operação que podem ser selecionados por meio de
uma chave convencional. Quando a chave está posicionada conforme mostrado no
diagrama, os dois canais funcionam de forma idêntica. Já quando a mesma é
comutada, o segundo canal opera no modo diferencial.
Neste modo, antes de ser demodulado, o sinal do amplificador de
transimpedância do canal 1 é subtraído dum sinal gerado por um DDS. A amplitude
e a fase do DDS podem ser ajustadas de forma que o resultado da subtração seja
nulo. Caso o ganho do amplificador subtrator seja alto, podem ser detectadas
pequenas oscilações no escoamento (num amplificador comum, o ganho alto faria com
que o sistema saturasse). A seguir serão apresentados os circuitos do demodulador e
dos amplificadores de transimpedância e subtrator.
Microcontrolador ARM LM3S9U96
Potenciômetro Digital
DDS Sintetizador Digital Filtro PI
Eletrodo de recepção
Demodulador
Condicionador de Sinais
Potenciômetro Digital (Ganho)
Potenciômetro Digital (Offset)
2x 2x
2x
Amplificador subtrator
Amplificador de transimpedância
2x

53
Amplificador de transimpedância. O circuito de medição utilizado já havia
sido apresentado na seção 2.4.3 e pode ser visto na Figura 21. Embora possa ser
alterado, o sinal de excitação foi fixado em 5 MHz (gerado pelo módulo de excitação)
e o fluido foi representado por sua impedância SZ . O valor dos componentes FC e
FR é respectivamente de 3,9 pF e 1 M. Foi utilizado o amplificador operacional
OPA656, com 230 MHz de banda de ganho unitário.
Figura 21 – Amplificador de transimpedância.
Amplificador subtrator. Na Figura 22 pode ser visto o circuito do
amplificador subtrator. O sinal SV é a tensão de saída do amplificador de
transimpedância e DDSV é uma tensão de fase e amplitude ajustáveis. As resistências
2R e 1R valem respectivamente 1 k e 330 . Considerando que o circuito é ideal, a
saída DifV será dada por
2
1Dif S DDS
RV V V
R . (3.1)
Figura 22 – Amplificador subtrator.
De forma simplificada (com base na equação (2.31)), a tensão SV pode ser
dada por
F SS E E
S F
Z YV V V
Z Y , (3.2)
5 MHz OPA656
SZEV
FC
FR
SV
OPA830
1R
2R
DifV
2R1RSV
DDSV

54
onde SY e FY são respectivamente as admitâncias do sensor e do elo de
realimentação formado por FC e FR .
Para uma dada admitância de referência *SY do sensor, a tensão do DDS
pode ser ajustada de forma a ser igual à tensão de saída do amplificador de
transimpedância. Dessa forma, a tensão DifV será
*
*2 2 2
1 1 1
S S EDif S DDS E E S S
F F F
R Y Y R V RV V V V V Y Y
R Y Y R Y R
. (3.3)
Assim, como todos os termos à direita dos parênteses na equação (3.3) são
constantes, fica claro que com o uso do amplificador subtrator estará sendo medida a
diferença da admitância do sensor em relação a uma admitância de referência.
Demodulador. Como demodulador foi utilizado o circuito integrado (CI)
LTC5507 da Linear Technology. Este CI é baseado em um detector de pico e opera
na faixa de 100 kHz a 1 GHz. O sinal de menor frequência de portadora que o
detector é capaz de demodular depende do valor de um capacitor de carga. Para
capacitâncias muito pequenas, o sinal de saída apresentará ondulações. Por outro
lado, para capacitâncias muito altas o circuito fica lento, o que restringe a largura da
banda base. Escolheu-se o maior capacitor possível (22 nF) que permitisse a detecção
de oscilações de até 1 kHz no escoamento.
O LTC5507 possui um circuito interno de compressão de ganho. Devido a
isso, a razão entre as variações das tensões de saída e entrada muda de acordo com a
faixa de tensão dos sinais na entrada do detector de pico. São definidas três faixas de
operação: de 0 mV a 60 mV, entre 60 mV e 140 mV, e acima de 140 mV. Cada faixa
terá sua curva de resposta correspondente.
Um esquema com os circuitos de entrada e saída do demodulador é dado na
Figura 23. Para reduzir ondulações no sinal de saída, principalmente quando o sinal
de excitação é de baixa frequência (100 kHz), foi adicionado um filtro na saída do
demodulador, com frequência de corte de aproximadamente 10 kHz. Na entrada do
mesmo foi inserido um filtro passa-faixa com frequências de corte de
aproximadamente 50 kHz e 10 MHz, para eliminar possíveis ruídos que estejam fora
da faixa de frequência do sinal esperado.

55
Figura 23 – Demodulador e seus filtros de entrada e saída.
3.3.3 Módulo Microcontrolado
O módulo microcontrolado é responsável pela amostragem das medidas,
comunicação com a IHM e programação dos DDSs e potenciômetros digitais. Foi
utilizado o microcontrolador LM3S9U96 da Texas Instruments. Trata-se de um
microcontrolador de 32 bits baseado no processador ARM Cortex-M3.
Todos os potenciômetros e DDSs são acessados pelo microcontrolador por
meio de um barramento serial SPI. O microcontrolador possui dois conversores AD
independentes de 12 bits. Cada conversor pode adquirir até um milhão de amostras
por segundo. Além disso, os conversores possuem circuito de realização de média por
hardware com até 64 amostras. Esta opção foi habilitada, de forma que poderiam ser
obtidas no máximo 15625 medidas por segundo. No entanto, foi utilizada uma taxa
de 1000 amostras por segundo, conforme havia sido definido no projeto do
demodulador.
O LM3S9U96 possui ainda um controlador ethernet, com as camadas de
acesso ao meio e física implementadas por hardware. A interface ethernet foi utilizada
na comunicação do sistema com um computador. Para que isso fosse possível a pilha
TCP/IP LwIP foi adicionada ao firmware do microcontrolador. LwIP (DUNKELS,
2001) é uma implementação da pilha TCP/IP que foi desenvolvida especialmente
para uso em sistemas embarcados. Uma vantagem do padrão ethernet é a isolação
galvânica entre as interfaces de rede. Com isso não existe a necessidade de que o
sensor e o computador utilizado para acessá-lo compartilhem o mesmo aterramento.
O firmware foi escrito em linguagem C por meio do ambiente de
desenvolvimento Eclipse. Além disso, o mesmo foi implementado utilizando-se o
sistema operacional em tempo real FreeRTOS. Atualmente as medidas são enviadas
diretamente para um computador sem qualquer processamento, não havendo
demanda para o uso de um sistema operacional em tempo real. No entanto, espera-se
LTC5507
130
Filtro passa baixa
Filtro passa alta
Filtro passa baixa
10 22 nF
1,5 nF 100 nF
150 SVEV

56
que em trabalhos futuros seu uso facilite o processamento embarcado das medições. O
software que recebe as medidas será apresentado a seguir.
3.4 SOFTWARE
Foi desenvolvido um software para que o sensor pudesse ser acessado pelo
usuário. O mesmo foi escrito em linguagem Java utilizando-se o ambiente de
desenvolvimento Eclipse.
A interface gráfica possibilita o armazenamento em um computador e a
visualização em tempo real das medidas. Além disso, algumas funcionalidades básicas
para configuração do sensor foram criadas. Podem ser alteradas as fases e amplitudes
dos DDSs, a taxa de amostragem, assim como os ganhos e os offsets dos
condicionadores dos sinais dos ADs. Uma captura de tela da interface desenvolvida
pode ser vista na Figura 24.
Figura 24 – Captura de tela da interface gráfica desenvolvida.
57
3.5 CONSIDERAÇÕES
Nesta seção o sistema de medição desenvolvido foi apresentado. Inicialmente
foi feita uma descrição dos eletrodos utilizados. Posteriormente os principais
componentes que compõe o circuito eletrônico foram vistos, ficando claro que o
sistema pode operar com frequências de excitação na faixa de 100 kHz a 7 MHz e com
taxas de aquisição de até 1000 amostras por segundo. Esta taxa pode ser aumentada
em pelo menos 10 vezes, desde que se diminua o valor do capacitor de carga do
demodulador. No entanto, esta diminuição acarreta no aumento da ondulação do
sinal demodulado, principalmente para frequências de excitação mais baixas. O uso
de um microcontrolador de 32 bits e de um sistema operacional em tempo real
possibilitará o processamento embarcado das medições no futuro. Atualmente as
medidas são transmitidas diretamente a um computador por meio de uma interface
ethernet. No computador, os dados são armazenados para que sejam processados
posteriormente. Embora o processamento embarcado seja indispensável em aplicações
industriais onde nem sempre se dispõe de uma interface de comunicação rápida como
a ethernet, na área acadêmica, a amostragem dos dados sem qualquer processamento,
para análise posterior, facilita os estudos. A resposta esperada do sensor desenvolvido
será apresentada na próxima seção.

58

59
4 SIMULAÇÕES
A resposta de sondas capacitivas utilizadas em medição de escoamentos não
depende apenas da razão volumétrica entre as fases que se encontram na região de
medição, mas também de suas distribuições espaciais (STRIZZOLO; CONVERTI,
1993, p. 726). Este fato implica na necessidade de caracterização do sensor para cada
possível padrão de escoamento. Devido a isso, por meio do método dos elementos
finitos (FEM), as curvas de resposta do sensor desenvolvido foram obtidas para os
padrões anular, estratificado, de bolhas dispersas e de golfadas. Posteriormente, a
resposta do circuito foi analisada com base nos valores obtidos.
4.1 MODELO EQUIVALENTE DOS ELETRODOS
Na Figura 25 (a) pode ser vista uma célula de medição capacitiva que, devido
a sua geometria simplificada, será utilizada nas explicações desta seção. A célula é
formada por eletrodos de placas paralelas, que estão dispostos em contato com uma
parede de constante dielétrica igual a 4. Na região entre as paredes há um espaço
onde é inserido o fluido a ser medido. Considerando-se que a célula seja utilizada
apenas com fluidos não condutivos, ela pode ser representada eletricamente pelo
circuito da Figura 25 (b), onde Cp é a capacitância das paredes e Cx , a capacitância
do fluido. Dessa forma, a capacitância Cc da célula será dada por
2
Cp CxCc
Cp Cx
. (4.1)
Figura 25 – Eletrodo de placas paralelas (a) e seu circuito elétrico equivalente (b).
1 m 0,5 m 0,5 m
1 m
e=4 e=4 e=1 (ar)
ou e=80 (água)
Parede Parede Fluido
CxCp
(a)
(b)
Cp
A B
A B

60
Com base na equação (4.1), pode-se calcular os valores de Cp e Cx por meio
de
2 Cc Cx
CpCx Cc
e 2
Cc CpCx
Cp Cc
. (4.2)(4.3)
Quando a célula é cheia com uma substância pura, a capacitância Cx pode
ser representada por
0 x gCx k , (4.4)
onde gk é uma constante geométrica e x é a constante dielétrica da substância.
Caso sejam feitas medidas de referência com a célula cheia de ar ou de água
deionizada, sua capacitância será, respectivamente, igual a arCc ou águaCc e as
capacitâncias do fluido, com base na equação (4.4), serão dadas por
0ar ar gCx k e 0água água gCx k . (4.5)(4.6)
Dessa forma, com base nas equações (4.3), (4.5), (4.6) e nas duas medidas de
referência, a capacitância da parede pode ser calculada por meio de
2 ar água ar água
ar água água ar
Cc CcCp
Cc Cc
. (4.7)
Para fluidos não isolantes, haverá uma resistência Rx em paralelo com Cx ,
como representado no circuito equivalente da Figura 26. A impedância da célula em
uma dada frequência poderia ser obtida por meio de simulações por FEM para
diversos padrões de escoamento e frações de vazio. Conhecendo-se a capacitância da
parede, os valores de Rx e Cx poderiam ser calculados com base nas impedâncias
das simulações. Assim, o circuito da Figura 26, com os valores dos componentes
Figura 26 – Circuito elétrico equivalente da célula de placas paralelas para fluido não isolante.
Cx
Rx
Cp Cp
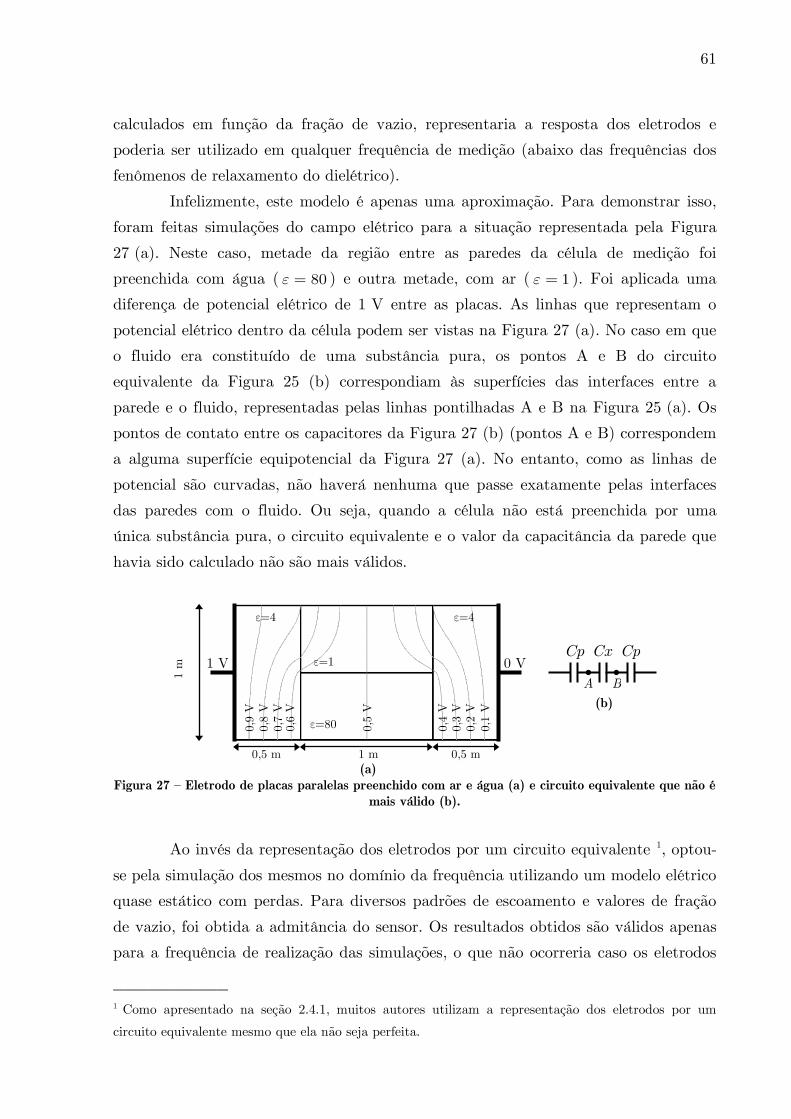
61
calculados em função da fração de vazio, representaria a resposta dos eletrodos e
poderia ser utilizado em qualquer frequência de medição (abaixo das frequências dos
fenômenos de relaxamento do dielétrico).
Infelizmente, este modelo é apenas uma aproximação. Para demonstrar isso,
foram feitas simulações do campo elétrico para a situação representada pela Figura
27 (a). Neste caso, metade da região entre as paredes da célula de medição foi
preenchida com água ( 80 ) e outra metade, com ar ( 1 ). Foi aplicada uma
diferença de potencial elétrico de 1 V entre as placas. As linhas que representam o
potencial elétrico dentro da célula podem ser vistas na Figura 27 (a). No caso em que
o fluido era constituído de uma substância pura, os pontos A e B do circuito
equivalente da Figura 25 (b) correspondiam às superfícies das interfaces entre a
parede e o fluido, representadas pelas linhas pontilhadas A e B na Figura 25 (a). Os
pontos de contato entre os capacitores da Figura 27 (b) (pontos A e B) correspondem
a alguma superfície equipotencial da Figura 27 (a). No entanto, como as linhas de
potencial são curvadas, não haverá nenhuma que passe exatamente pelas interfaces
das paredes com o fluido. Ou seja, quando a célula não está preenchida por uma
única substância pura, o circuito equivalente e o valor da capacitância da parede que
havia sido calculado não são mais válidos.
Figura 27 – Eletrodo de placas paralelas preenchido com ar e água (a) e circuito equivalente que não é
mais válido (b).
Ao invés da representação dos eletrodos por um circuito equivalente 1, optou-
se pela simulação dos mesmos no domínio da frequência utilizando um modelo elétrico
quase estático com perdas. Para diversos padrões de escoamento e valores de fração
de vazio, foi obtida a admitância do sensor. Os resultados obtidos são válidos apenas
para a frequência de realização das simulações, o que não ocorreria caso os eletrodos
1 Como apresentado na seção 2.4.1, muitos autores utilizam a representação dos eletrodos por um
circuito equivalente mesmo que ela não seja perfeita.
0,9
V
0,8
V
0,7
V
0,5
V
0,4
V
0,3
V
0,2
V
0,1
V
1 V 0 V
e=4 e=4
e=1
e=80
1 m 0,5 m 0,5 m
1 m CxCp
(b)
Cp
A B
(a)
0,6
V

62
pudessem ser representados pelo circuito equivalente. Trabalhou-se com uma
frequência de 5 MHz.
4.2 MALHA E GEOMETRIA DO MODELO SIMULADO
Considerando-se que na prática a frequência f do sinal aplicado ao eletrodo de
excitação não excederá 10 MHz, o período 1 /T f de variação do campo elétrico
será sempre superior a 100 ns. A variação temporal do campo elétrico gera uma onda
eletromagnética e caso existam as condições necessárias para que esta onda se
propague, sua velocidade de propagação será igual a 83 10c m/s. Como o
comprimento l do sensor é da ordem de 30 mm, o tempo para propagação da onda
pelo sensor será de 3 830 10 / 3 10 100pT ps. Como pT T , o acoplamento
entre os campos magnético e elétrico pode ser desconsiderado (HAUS; MELCHER,
1989, p. 3.11). Isso justifica o uso do modelo elétrico quase estático.
Nas simulações por elementos finitos, o domínio de avaliação do campo elétrico
deve ser limitado. Os limites do universo foram definidos por um cilindro de 55 mm
de altura e 65 mm de raio, como pode ser visto na Figura 28. Quando possível, o
plano de simetria horizontal do sensor foi utilizado para simplificar as simulações.
Como condição de contorno, foi estabelecida a não existência de campo de
deslocamento elétrico penetrando nas paredes do cilindro. Sabe-se que isso não ocorre
na prática e que as partes do tubo não abrangidas pelo modelo também irão interferir
nas medidas do sensor. Logo, as dimensões do universo devem ser escolhidas com
cuidado, minimizando os erros sem comprometer o custo computacional.
Para determinação da altura do cilindro que representa o universo, foram
Figura 28 – Ângulos entre os eletrodos e diagrama com dimensões do modelo utilizado nas simulações

63
feitas diversas simulações com a mesma variando de 25 a 80 mm e com o tubo cheio
de água. Os módulos das admitâncias para cada caso em relação à situação de maior
comprimento estão apresentados na Figura 29. No gráfico, o ponto marcado por um
quadrado indica o caso fixado como referência (valor de 100 %). Os outros pontos são
dados em relação a este. Pode ser observada a convergência da admitância com o
aumento do comprimento. Foi escolhido o ponto de menor comprimento com variação
de admitância inferior a 0,5 %. Este ponto corresponde a uma altura de 55 mm,
conforme indicado no gráfico e visto na Figura 28. O mesmo procedimento foi
repetido para o diâmetro do universo e a curva de convergência resultante se
encontra na Figura 30.
Figura 29 – Curva de convergência para escolha do comprimento do universo.
Figura 30 – Curva de convergência para escolha do diâmetro do universo.
30 40 50 60 70 80
100
102
104
106
(55; 100,4)
Comprimento do Universo (mm)
Adm
itân
cia
Abs
olut
a P
erce
ntua
l (%
)
40 60 80 100 120 140 16098
100
102
104
(130; 99,75)
Diâmetro do Universo (mm)
Adm
itân
cia
Abs
olut
a P
erce
ntua
l (%
)

64
Utilizou-se uma malha fixa em todas as simulações. Na região interna do
tubo, o tamanho dos elementos foi limitado pelas variações mínimas no escoamento
que seriam simuladas. Com a malha pronta, cada elemento teve um valor de
permissividade e condutividade atribuído de acordo com sua localização espacial. Na
região dos eletrodos de recepção, também foi aplicada uma restrição no tamanho
máximo dos elementos. Variações nesta restrição geraram a curva de convergência da
Figura 31. Utilizando-se o mesmo critério da decisão das dimensões do universo, foi
selecionada a malha de 1,89 milhões de elementos.
Figura 31 – Curva de convergência para escolha do tamanho dos elementos da malha.
Na Figura 32 estão indicados os eletrodos do modelo. Como condição de
fronteira, definiu-se como nulo o potencial elétrico dos eletrodos de recepção, guarda e
blindagem. Para o eletrodo de excitação foi definido um potencial de 1 V com
frequência de 5 MHz. Após as simulações, foi calculada a integral da densidade de
corrente no eletrodo de recepção, que equivale numericamente à admitância do sensor
(devido à diferença de potencial unitária).
Figura 32 – Representação dos eletrodos da sonda capacitiva
0 1 2 3 4
x 106
100
102
104
106
108
110
(1,89 106; 100,5)
Número de Elementos da Malha
Adm
itân
cia
em R
elaç
ão à
Mel
hor
Mal
ha (
%)

65
Ao domínio do universo atribuiu-se a permissividade relativa do vácuo.
Considerou-se que o tubo era feito de acrílico, com permissividade relativa igual a
quatro. Em todas as simulações o fluido era formado por fases de ar e de água, com
permissividade relativa igual a 80. À água atribui-se um valor de condutividade de
50 µS/cm, enquanto que para os materiais não condutivos (ar e acrílico) foi utilizado
um valor de 10-11 µS/cm. As simulações para cada padrão de escoamento serão
apresentadas a seguir.
4.3 ESCOAMENTO ESTRATIFICADO
Como esquematizado na Figura 33, o escoamento estratificado pode ser
caracterizado pela altura h da fase líquida. As simulações foram realizadas
iterativamente, alterando-se sempre o valor de h , de forma que a fração de vazio
variasse de 0 % a 100 % em intervalos de 5 %. A variação da admitância em relação
à fração de vazio para o escoamento estratificado pode ser vista na Figura 34. Como
a admitância é uma variável complexa, foi representada por seu módulo e fase.
Figura 33 – Representação simplificada de um escoamento estratificado.
Por meio de uma regressão pelo método dos mínimos quadrados, foi obtido
um polinômio de terceiro grau que representa os pontos da Figura 34. O coeficiente
de determinação é de 0,999 e o polinômio está apresentado na equação (4.8). As
frações de vazio devem ser dadas em valores percentuais (0 a 100).
6 3 4 2
2
6,48 146,02 10 7,41 200,87 10
6,57 195,54 10 6,02 158,18 [ ]
j j
j j S
EY
(4.8)

66
Figura 34 – Módulo e fase da admitância da sonda capacitiva para diferentes frações de vazio em
escoamento estratificado. Frequência de 5 MHz.
4.4 ESCOAMENTO ANULAR
No modelo representado pela Figura 35, o fluido é formado por um núcleo
gasoso que é concêntrico com o tubo e está envolto por uma fase líquida. Variou-se o
diâmetro do núcleo gasoso DAr para obtenção de diferentes valores de fração de
vazio numa faixa entre 60 % e 100 % em intervalos de 5 %. Os valores da admitância
do sensor para as diferentes frações de vazio foram apresentados na Figura 36.
Figura 35 – Representação simplificada de um escoamento anular.
Um polinômio de segundo grau que representa os pontos da Figura 36 foi
obtido pelo método dos mínimos quadrados com coeficiente de determinação de 0,998.
O mesmo está escrito na equação (4.9). O polinômio é válido para frações de vazio
entre 60 % e 100 %.
2 21,04 3,61 10 1,46 3,42 41,20 35,42 [ ]j j j S AY (4.9)
0 20 40 60 80 100
10
30
50
70
90
110
130
150
Mód
ulo
da A
dmit
ânci
a (µ
S)
Fração de Vazio (%)
0 20 40 60 80 100
87,5
88
88,5
89
89,5
90
90,5
91
Fas
e da
Adm
itân
cia
(Gra
us)
Módulo
Fase
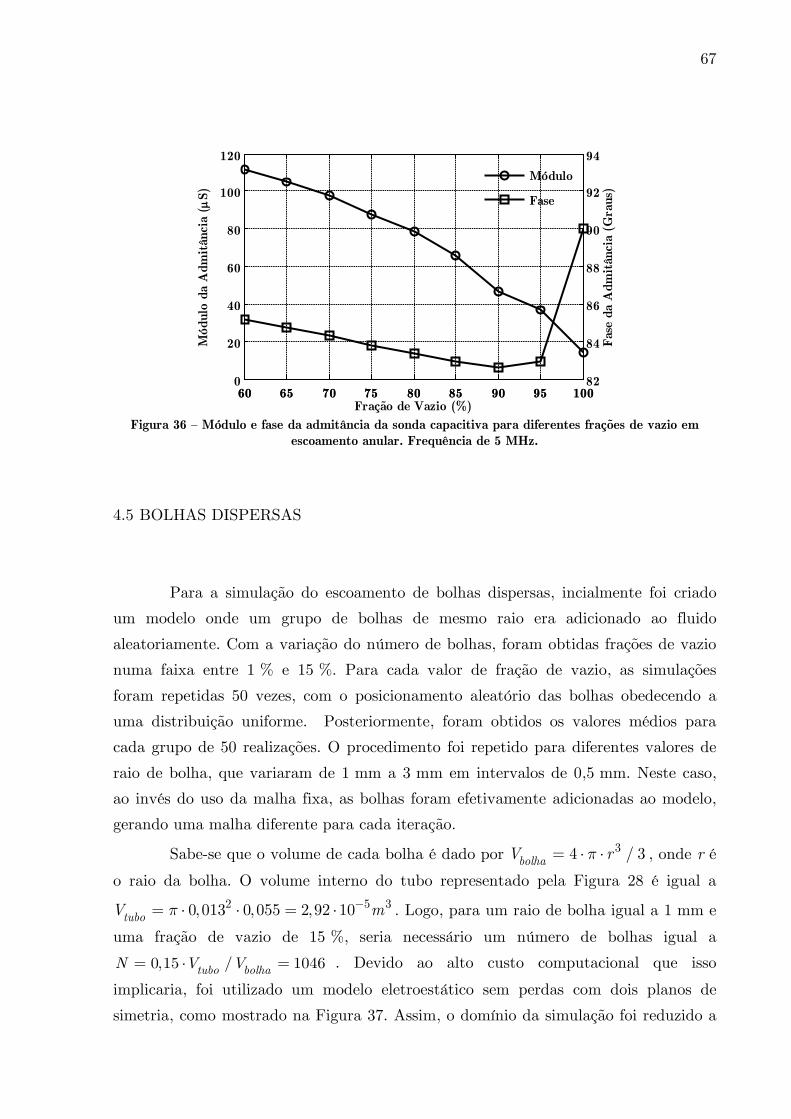
67
Figura 36 – Módulo e fase da admitância da sonda capacitiva para diferentes frações de vazio em
escoamento anular. Frequência de 5 MHz.
4.5 BOLHAS DISPERSAS
Para a simulação do escoamento de bolhas dispersas, incialmente foi criado
um modelo onde um grupo de bolhas de mesmo raio era adicionado ao fluido
aleatoriamente. Com a variação do número de bolhas, foram obtidas frações de vazio
numa faixa entre 1 % e 15 %. Para cada valor de fração de vazio, as simulações
foram repetidas 50 vezes, com o posicionamento aleatório das bolhas obedecendo a
uma distribuição uniforme. Posteriormente, foram obtidos os valores médios para
cada grupo de 50 realizações. O procedimento foi repetido para diferentes valores de
raio de bolha, que variaram de 1 mm a 3 mm em intervalos de 0,5 mm. Neste caso,
ao invés do uso da malha fixa, as bolhas foram efetivamente adicionadas ao modelo,
gerando uma malha diferente para cada iteração.
Sabe-se que o volume de cada bolha é dado por 34 / 3bolhaV r , onde r é
o raio da bolha. O volume interno do tubo representado pela Figura 28 é igual a 2 5 30,013 0,055 2,92 10tuboV m . Logo, para um raio de bolha igual a 1 mm e
uma fração de vazio de 15 %, seria necessário um número de bolhas igual a
0,15 / 1046tubo bolhaN V V . Devido ao alto custo computacional que isso
implicaria, foi utilizado um modelo eletroestático sem perdas com dois planos de
simetria, como mostrado na Figura 37. Assim, o domínio da simulação foi reduzido a
60 65 70 75 80 85 90 95 1000
20
40
60
80
100
120
Mód
ulo
da A
dmit
ânci
a ( µ
S)
Fração de Vazio (%)
60 65 70 75 80 85 90 95 10082
84
86
88
90
92
94
Fas
e da
Adm
itân
cia
(Gra
us)
Módulo
Fase
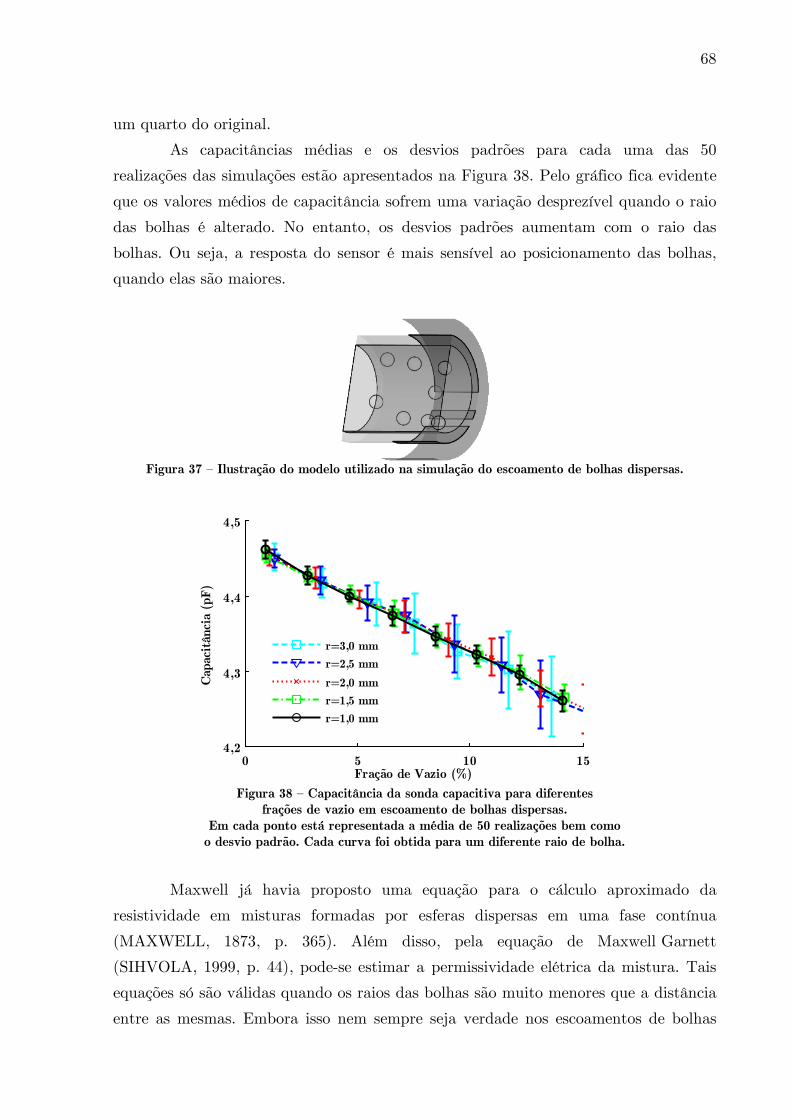
68
um quarto do original.
As capacitâncias médias e os desvios padrões para cada uma das 50
realizações das simulações estão apresentados na Figura 38. Pelo gráfico fica evidente
que os valores médios de capacitância sofrem uma variação desprezível quando o raio
das bolhas é alterado. No entanto, os desvios padrões aumentam com o raio das
bolhas. Ou seja, a resposta do sensor é mais sensível ao posicionamento das bolhas,
quando elas são maiores.
Figura 37 – Ilustração do modelo utilizado na simulação do escoamento de bolhas dispersas.
Figura 38 – Capacitância da sonda capacitiva para diferentes
frações de vazio em escoamento de bolhas dispersas. Em cada ponto está representada a média de 50 realizações bem como
o desvio padrão. Cada curva foi obtida para um diferente raio de bolha.
Maxwell já havia proposto uma equação para o cálculo aproximado da
resistividade em misturas formadas por esferas dispersas em uma fase contínua
(MAXWELL, 1873, p. 365). Além disso, pela equação de Maxwell Garnett
(SIHVOLA, 1999, p. 44), pode-se estimar a permissividade elétrica da mistura. Tais
equações só são válidas quando os raios das bolhas são muito menores que a distância
entre as mesmas. Embora isso nem sempre seja verdade nos escoamentos de bolhas
0 5 10 154,2
4,3
4,4
4,5
Fração de Vazio (%)
Cap
acit
ânci
a (p
F)
r=3,0 mmr=2,5 mm
r=2,0 mmr=1,5 mmr=1,0 mm
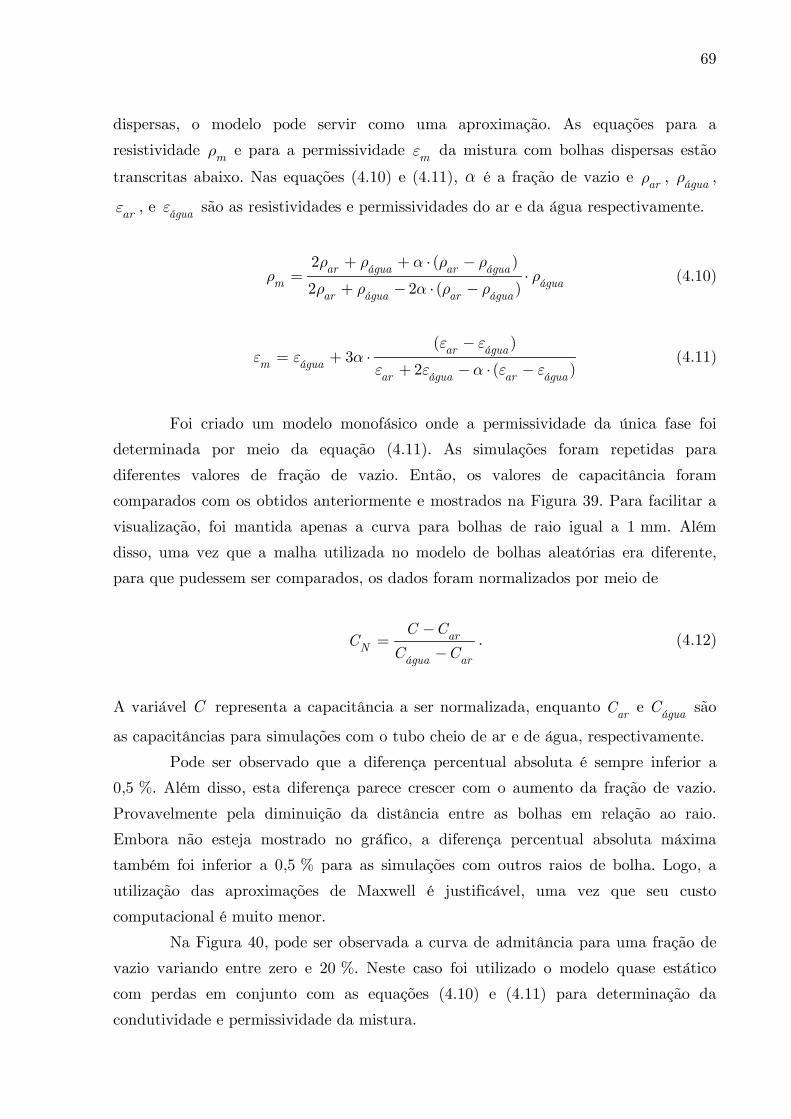
69
dispersas, o modelo pode servir como uma aproximação. As equações para a
resistividade m e para a permissividade m da mistura com bolhas dispersas estão
transcritas abaixo. Nas equações (4.10) e (4.11), é a fração de vazio e ar , água ,
ar , e água são as resistividades e permissividades do ar e da água respectivamente.
2 ( )
2 2 ( )ar água ar água
m águaar água ar água
(4.10)
( )
32 ( )
ar águam água
ar água ar água
(4.11)
Foi criado um modelo monofásico onde a permissividade da única fase foi
determinada por meio da equação (4.11). As simulações foram repetidas para
diferentes valores de fração de vazio. Então, os valores de capacitância foram
comparados com os obtidos anteriormente e mostrados na Figura 39. Para facilitar a
visualização, foi mantida apenas a curva para bolhas de raio igual a 1 mm. Além
disso, uma vez que a malha utilizada no modelo de bolhas aleatórias era diferente,
para que pudessem ser comparados, os dados foram normalizados por meio de
arN
água ar
C CC
C C
. (4.12)
A variável C representa a capacitância a ser normalizada, enquanto arC e águaC são
as capacitâncias para simulações com o tubo cheio de ar e de água, respectivamente.
Pode ser observado que a diferença percentual absoluta é sempre inferior a
0,5 %. Além disso, esta diferença parece crescer com o aumento da fração de vazio.
Provavelmente pela diminuição da distância entre as bolhas em relação ao raio.
Embora não esteja mostrado no gráfico, a diferença percentual absoluta máxima
também foi inferior a 0,5 % para as simulações com outros raios de bolha. Logo, a
utilização das aproximações de Maxwell é justificável, uma vez que seu custo
computacional é muito menor.
Na Figura 40, pode ser observada a curva de admitância para uma fração de
vazio variando entre zero e 20 %. Neste caso foi utilizado o modelo quase estático
com perdas em conjunto com as equações (4.10) e (4.11) para determinação da
condutividade e permissividade da mistura.

70
Figura 39 – Comparativo no escoamento de bolhas dispersas entre as capacitâncias encontradas pela
relação de Maxwell e pela simulação com bolhas posicionadas aleatoriamente. Também está representada a diferença percentual absoluta entre os dois métodos.
Figura 40 – Módulo e fase da admitância da sonda capacitiva para diferentes frações de vazio em
escoamento de bolhas dispersas com modelo de Maxwell. Frequência de 5 MHz.
O polinômio de segundo grau da equação (4.13), que representa os pontos da
Figura 40, foi obtido com coeficiente de determinação unitário. Os valores de entrada
do polinômio devem estar entre 0 % e 20 %.
4 2 22,09 35,71 10 5,44 37,47 10 5,72 155,03 [ ]j j j S BDY (4.13)
2 4 6 8 10 12 14
95
96
97
98
99
100
Cap
acit
ânci
a N
orm
aliz
ada
(%)
Fração de Vazio (%)
2 4 6 8 10 12 14
0,05
0,15
0,25
0,35
0,45
0,55
Difer
ença
Per
cent
ual A
bsol
uta
(%)Relação de Maxwell
Bolhas Aleatórias (r=1.0 mm)
Diferença Percentual
0 5 10 15 20146
147
148
149
150
151
152
153
154
155
156
Mód
ulo
da A
dmit
ânci
a (µ
S)
Fração de Vazio (%)
0 5 10 15 20
87,25
87,5
87,75
88
88,25
Fas
e da
Adm
itân
cia
(Gra
us)
Módulo
Fase

71
4.6 ESCOAMENTO INTERMITENTE
Os escoamentos em golfadas são classificados como intermitentes, uma vez
que ocorrem variações bruscas na forma como as fases se distribuem no interior do
duto. Estas variações permitem que o escoamento seja segmentado de acordo com
suas características locais, como está ilustrado na Figura 41 para casos verticais (a) e
horizontais (b). Existem dois tipos de segmentos, um formado por um pistão líquido
que pode conter bolhas dispersas e outro formado por uma bolha alongada. No
momento da medição é necessária a identificação de cada segmento, pois cada
distribuição das fases exige o uso de uma curva específica para cálculo da fração de
vazio.
(a)
(b)
(c)
Figura 41 – Representação dos segmentos que compõe os escoamentos em golfadas. Escoamento em golfadas vertical (a) e horizontal (b). Modelo da bolha excêntrica que ocorre no
escoamento horizontal (c).
Do ponto de vista do sensor capacitivo, para escoamentos verticais, o
segmento do pistão líquido pode ser interpretado como um escoamento de bolhas
dispersas. Já para a região das bolhas alongadas, a resposta obtida para o escoamento
anular pode ser utilizada. Este e aquele casos ocorrem respectivamente para altos e
baixos valores de fração de vazio. Dessa forma, a fração de vazio pode ser utilizada
como parâmetro para seleção da curva a ser utilizada.
Anu
lar
Bol
has
Dis
pers
as
Bolha Excêntrica Bolhas Dispersas
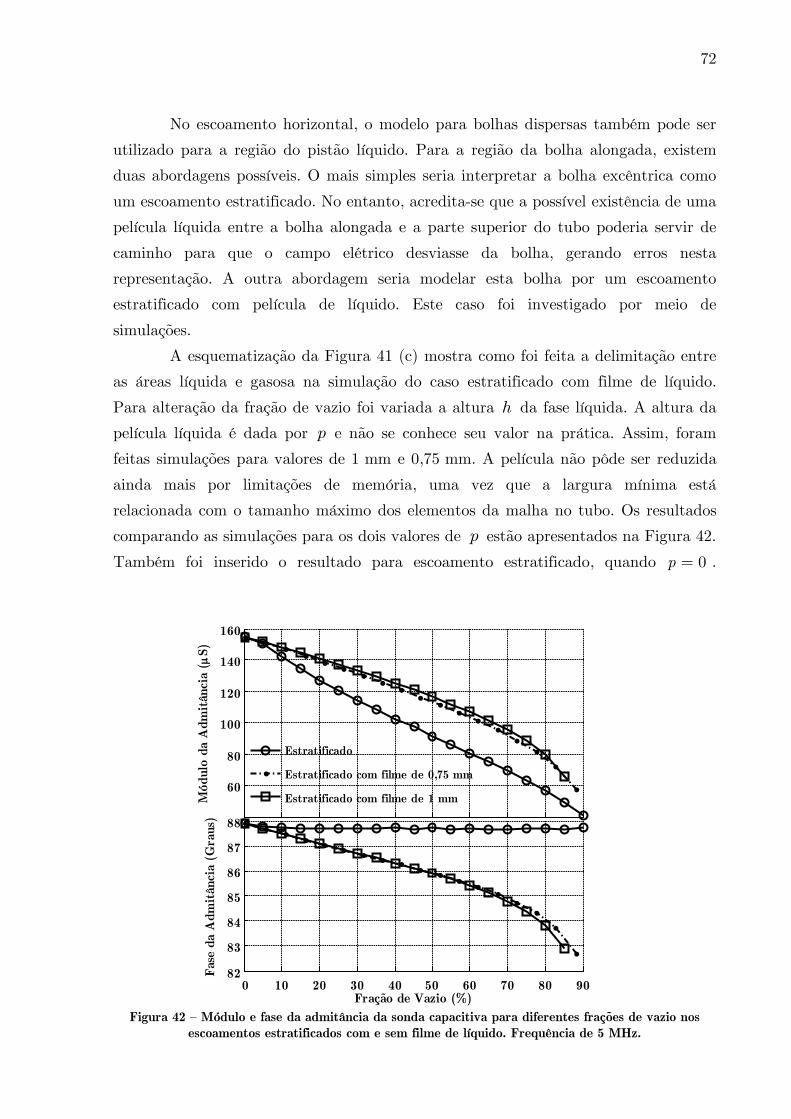
72
No escoamento horizontal, o modelo para bolhas dispersas também pode ser
utilizado para a região do pistão líquido. Para a região da bolha alongada, existem
duas abordagens possíveis. O mais simples seria interpretar a bolha excêntrica como
um escoamento estratificado. No entanto, acredita-se que a possível existência de uma
película líquida entre a bolha alongada e a parte superior do tubo poderia servir de
caminho para que o campo elétrico desviasse da bolha, gerando erros nesta
representação. A outra abordagem seria modelar esta bolha por um escoamento
estratificado com película de líquido. Este caso foi investigado por meio de
simulações.
A esquematização da Figura 41 (c) mostra como foi feita a delimitação entre
as áreas líquida e gasosa na simulação do caso estratificado com filme de líquido.
Para alteração da fração de vazio foi variada a altura h da fase líquida. A altura da
película líquida é dada por p e não se conhece seu valor na prática. Assim, foram
feitas simulações para valores de 1 mm e 0,75 mm. A película não pôde ser reduzida
ainda mais por limitações de memória, uma vez que a largura mínima está
relacionada com o tamanho máximo dos elementos da malha no tubo. Os resultados
comparando as simulações para os dois valores de p estão apresentados na Figura 42.
Também foi inserido o resultado para escoamento estratificado, quando 0p .
Figura 42 – Módulo e fase da admitância da sonda capacitiva para diferentes frações de vazio nos
escoamentos estratificados com e sem filme de líquido. Frequência de 5 MHz.
60
80
100
120
140
160
Mód
ulo
da A
dmit
ânci
a (µ
S)
0 10 20 30 40 50 60 70 80 9082
83
84
85
86
87
88
Fração de Vazio (%)
Fas
e da
Adm
itân
cia
(Gra
us)
Estratificado
Estratificado com filme de 0,75 mm
Estratificado com filme de 1 mm
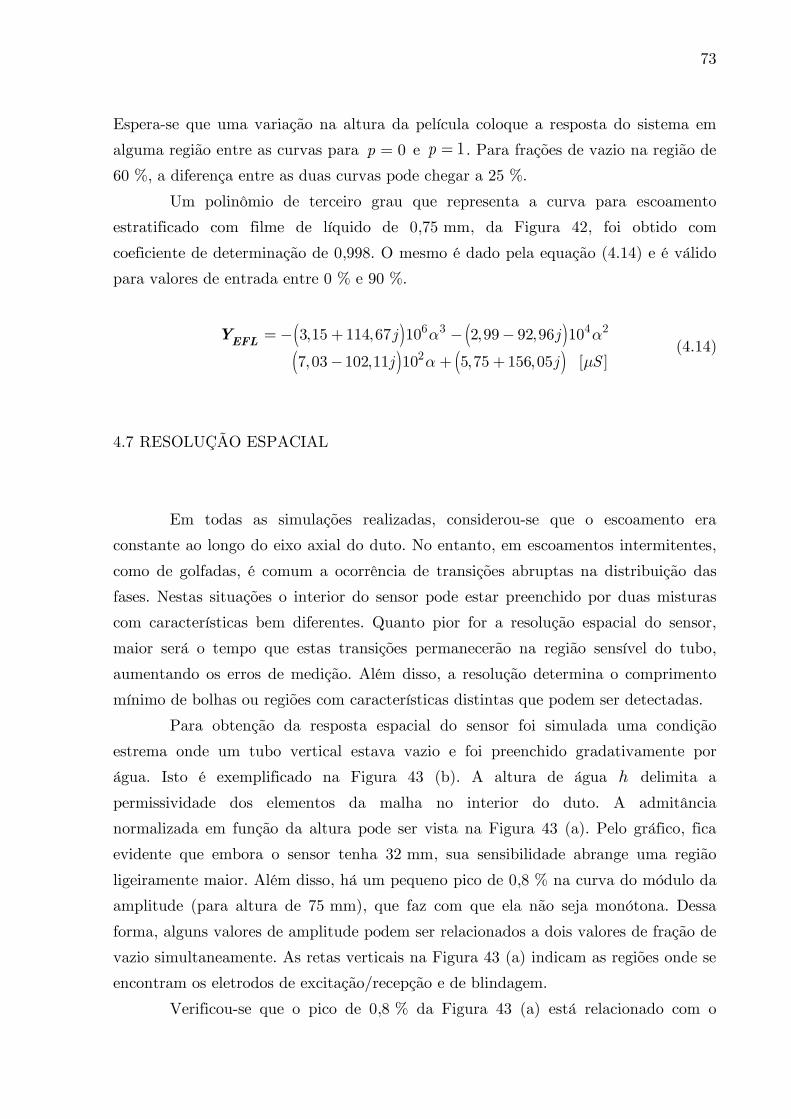
73
Espera-se que uma variação na altura da película coloque a resposta do sistema em
alguma região entre as curvas para 0p e 1p . Para frações de vazio na região de
60 %, a diferença entre as duas curvas pode chegar a 25 %.
Um polinômio de terceiro grau que representa a curva para escoamento
estratificado com filme de líquido de 0,75 mm, da Figura 42, foi obtido com
coeficiente de determinação de 0,998. O mesmo é dado pela equação (4.14) e é válido
para valores de entrada entre 0 % e 90 %.
6 3 4 2
2
3,15 114,67 10 2,99 92,96 10
7,03 102,11 10 5,75 156,05 [ ]
j j
j j S
EFLY
(4.14)
4.7 RESOLUÇÃO ESPACIAL
Em todas as simulações realizadas, considerou-se que o escoamento era
constante ao longo do eixo axial do duto. No entanto, em escoamentos intermitentes,
como de golfadas, é comum a ocorrência de transições abruptas na distribuição das
fases. Nestas situações o interior do sensor pode estar preenchido por duas misturas
com características bem diferentes. Quanto pior for a resolução espacial do sensor,
maior será o tempo que estas transições permanecerão na região sensível do tubo,
aumentando os erros de medição. Além disso, a resolução determina o comprimento
mínimo de bolhas ou regiões com características distintas que podem ser detectadas.
Para obtenção da resposta espacial do sensor foi simulada uma condição
estrema onde um tubo vertical estava vazio e foi preenchido gradativamente por
água. Isto é exemplificado na Figura 43 (b). A altura de água h delimita a
permissividade dos elementos da malha no interior do duto. A admitância
normalizada em função da altura pode ser vista na Figura 43 (a). Pelo gráfico, fica
evidente que embora o sensor tenha 32 mm, sua sensibilidade abrange uma região
ligeiramente maior. Além disso, há um pequeno pico de 0,8 % na curva do módulo da
amplitude (para altura de 75 mm), que faz com que ela não seja monótona. Dessa
forma, alguns valores de amplitude podem ser relacionados a dois valores de fração de
vazio simultaneamente. As retas verticais na Figura 43 (a) indicam as regiões onde se
encontram os eletrodos de excitação/recepção e de blindagem.
Verificou-se que o pico de 0,8 % da Figura 43 (a) está relacionado com o
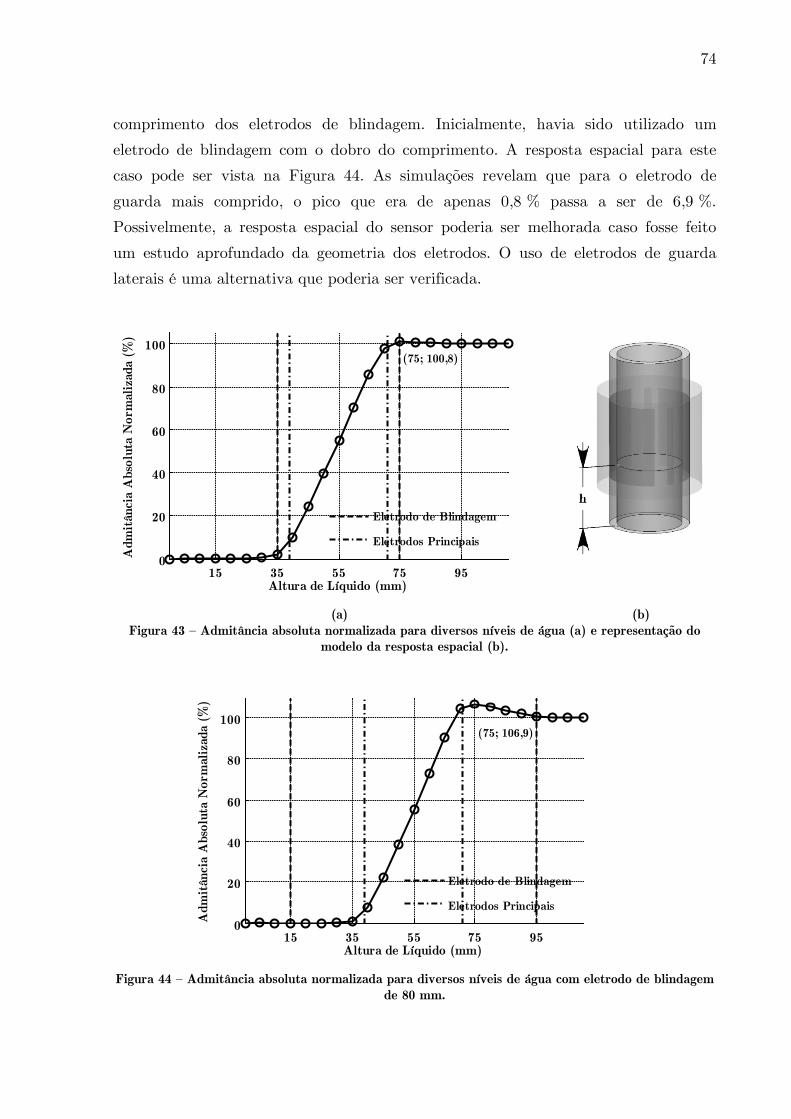
74
comprimento dos eletrodos de blindagem. Inicialmente, havia sido utilizado um
eletrodo de blindagem com o dobro do comprimento. A resposta espacial para este
caso pode ser vista na Figura 44. As simulações revelam que para o eletrodo de
guarda mais comprido, o pico que era de apenas 0,8 % passa a ser de 6,9 %.
Possivelmente, a resposta espacial do sensor poderia ser melhorada caso fosse feito
um estudo aprofundado da geometria dos eletrodos. O uso de eletrodos de guarda
laterais é uma alternativa que poderia ser verificada.
(a)
(b) Figura 43 – Admitância absoluta normalizada para diversos níveis de água (a) e representação do
modelo da resposta espacial (b).
Figura 44 – Admitância absoluta normalizada para diversos níveis de água com eletrodo de blindagem
de 80 mm.
15 35 55 75 950
20
40
60
80
100
Altura de Líquido (mm)
Adm
itân
cia
Abs
olut
a N
orm
aliz
ada
(%)
(75; 100,8)
Eletrodo de Blindagem
Eletrodos Principais
15 35 55 75 950
20
40
60
80
100
Altura de Líquido (mm)
Adm
itân
cia
Abs
olut
a N
orm
aliz
ada
(%)
(75; 106,9)
Eletrodo de Blindagem
Eletrodos Principais
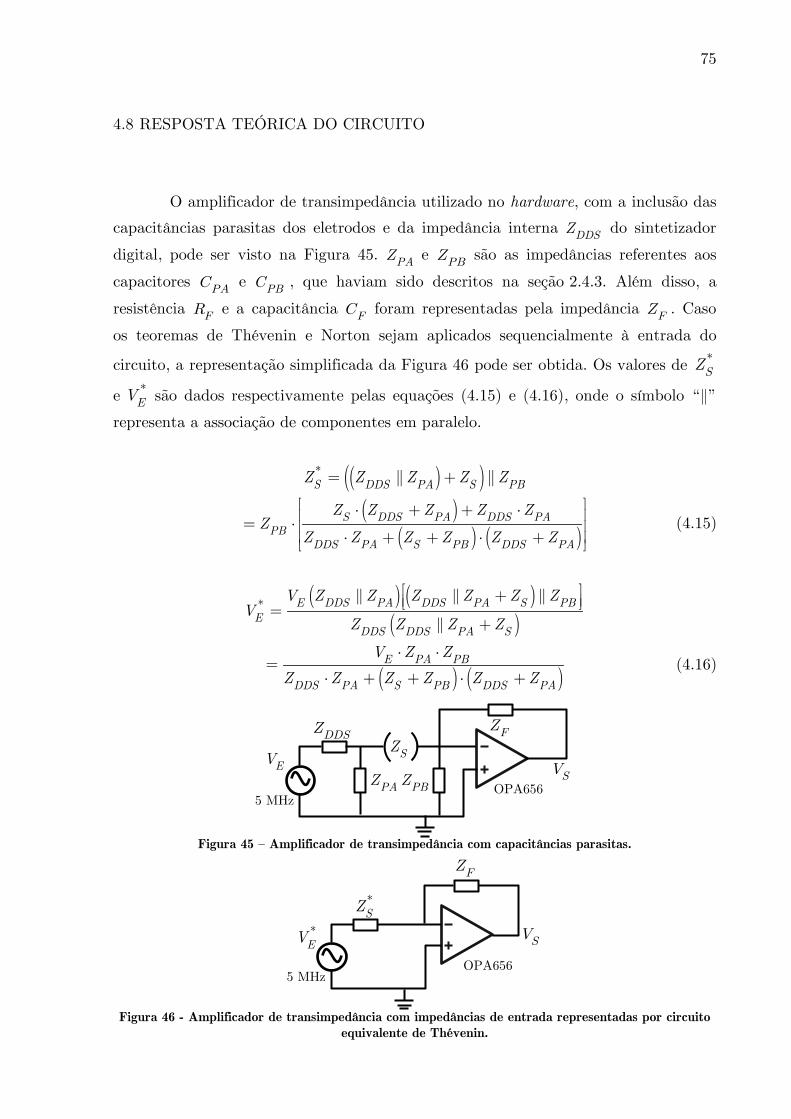
75
4.8 RESPOSTA TEÓRICA DO CIRCUITO
O amplificador de transimpedância utilizado no hardware, com a inclusão das
capacitâncias parasitas dos eletrodos e da impedância interna DDSZ do sintetizador
digital, pode ser visto na Figura 45. PAZ e PBZ são as impedâncias referentes aos
capacitores PAC e PBC , que haviam sido descritos na seção 2.4.3. Além disso, a
resistência FR e a capacitância FC foram representadas pela impedância FZ . Caso
os teoremas de Thévenin e Norton sejam aplicados sequencialmente à entrada do
circuito, a representação simplificada da Figura 46 pode ser obtida. Os valores de *SZ
e *EV são dados respectivamente pelas equações (4.15) e (4.16), onde o símbolo “”
representa a associação de componentes em paralelo.
*S DDS PA S PBZ Z Z Z Z
S DDS PA DDS PA
PBDDS PA S PB DDS PA
Z Z Z Z ZZ
Z Z Z Z Z Z
(4.15)
* E DDS PA DDS PA S PBE
DDS DDS PA S
V Z Z Z Z Z ZV
Z Z Z Z
E PA PB
DDS PA S PB DDS PA
V Z Z
Z Z Z Z Z Z
(4.16)
Figura 45 – Amplificador de transimpedância com capacitâncias parasitas.
Figura 46 - Amplificador de transimpedância com impedâncias de entrada representadas por circuito
equivalente de Thévenin.
5 MHz OPA656
DDSZ
SZFZ
PAZ PBZEV
SV
5 MHz OPA656
*SZ
*EV
FZ
SV

76
Por fim, com base na equação (2.30), a saída do circuito equivalente será:
*
* 1E F V
SF S V
V Z AV
Z Z A
. (4.17)
Figura 47 – Tensões teóricas na saída do circuito em função da fração de vazio para diferentes padrões
de escoamento. As curvas em tons mais claros são para um amplificador ideal sem capacitâncias parasitas.
Utilizando os polinômios das regressões lineares das simulações e a equação
(4.17), achou-se a saída teórica do amplificador de transimpedância em função da
fração de vazio. O ganho VA do amplificador operacional foi determinado pela
equação (2.29). Os valores das variáveis utilizadas nos cálculos foram: 7EV Vpp,
20DDSZ , 80PA PBC C pF, 1FR M, 3,9FC pF, 230UGBW MHz e 6
0 3,16 10VA . O amplificador está conectado a um demodulador, cuja saída será o
módulo do sinal de entrada multiplicado por uma constante característica do mesmo.
As saídas de tensão do circuito (levando em consideração a resposta do demodulador)
podem ser vistas na Figura 47. No mesmo gráfico, em tons mais claros, também estão
presentes curvas de tensão para um caso ideal, desconsiderando as capacitâncias
parasitas e as limitações de banda do amplificador operacional.
No caso não ideal, a variação máxima de tensão será de 2,68 V, ocupando
quase toda a faixa dinâmica de 3 V do conversor AD. Na Figura 48, ainda podem ser
vistas as variações das tensões de saída em relação às frações de vazio. O escoamento
de bolhas dispersas é o de pior sensibilidade (cerca de 8 mV para variação de 1 % na
fração de vazio).
0 20 40 60 80 1000
1
2
3
4
Ten
são
de s
aída
(V
)
Fração de Vazio (%)
Estratificado
Anular
Bolhas Dispersas
Estratificado com Filme de Líquido
Com capacitâncias parasitas
Modelo Ideal

77
Figura 48 – Variação da tensão de saída em relação ao percentual de fração de vazio para padrões de
escoamento simulados.
As tensões de saída obtidas são apenas uma aproximação, servindo como
referência de projeto. Valores práticos podem variar devido aos seguintes fatores:
tolerâncias de componentes; ruídos; não idealidades que não tenham sido modeladas;
variações na temperatura; e variações nas propriedades elétricas dos fluidos. Logo,
sempre que medidas práticas e teóricas forem comparadas, deve ser feita a
normalização da tensão com base em valores máximos e mínimos. A tensão
normalizada percentual é dada pela equação (4.18), onde V é a tensão absoluta e
maxV e minV são as tensões máxima e mínima, respectivamente.
min
max min
100 %N
V VV
V V
(4.18)
Após a normalização das respostas para os modelos ideal e não ideal, que
haviam sido mostradas na Figura 47, foram obtidas curvas muito parecidas. A
diferença percentual entre estas curvas pode ser vista na Figura 49, e é sempre
inferior a 0,3 %. Como o modelo ideal é baseado na equação (2.31), a normalização da
tensão de saída será exatamente igual à normalização do módulo da admitância. Ou
seja, o módulo normalizado dos polinômios da admitância são suficientes para
descrever o sistema e o uso do modelo ideal é muito vantajoso devido à simplicidade.
0 20 40 60 80 1000
0,02
0,04
0,06
0,08
Sens
ibilid
ade
(V/%
)
Fração de Vazio (%)
Estratificado
Anular
Bolhas Dispersas
Estratificado com Filme de Líquido
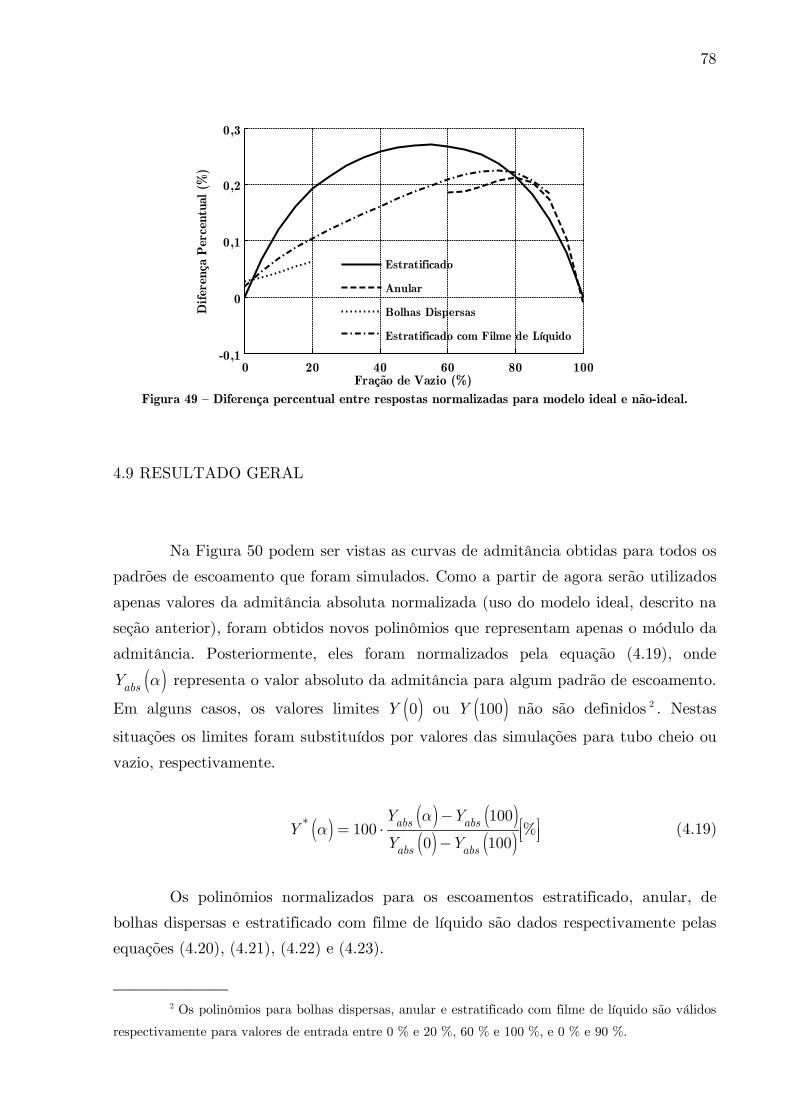
78
Figura 49 – Diferença percentual entre respostas normalizadas para modelo ideal e não-ideal.
4.9 RESULTADO GERAL
Na Figura 50 podem ser vistas as curvas de admitância obtidas para todos os
padrões de escoamento que foram simulados. Como a partir de agora serão utilizados
apenas valores da admitância absoluta normalizada (uso do modelo ideal, descrito na
seção anterior), foram obtidos novos polinômios que representam apenas o módulo da
admitância. Posteriormente, eles foram normalizados pela equação (4.19), onde
absY representa o valor absoluto da admitância para algum padrão de escoamento.
Em alguns casos, os valores limites 0Y ou 100Y não são definidos 2 . Nestas
situações os limites foram substituídos por valores das simulações para tubo cheio ou
vazio, respectivamente.
* 100100 %
0 100abs abs
abs abs
Y YY
Y Y
(4.19)
Os polinômios normalizados para os escoamentos estratificado, anular, de
bolhas dispersas e estratificado com filme de líquido são dados respectivamente pelas
equações (4.20), (4.21), (4.22) e (4.23).
2 Os polinômios para bolhas dispersas, anular e estratificado com filme de líquido são válidos
respectivamente para valores de entrada entre 0 % e 20 %, 60 % e 100 %, e 0 % e 90 %.
0 20 40 60 80 100-0,1
0
0,1
0,2
0,3
Difer
ença
Per
cent
ual (%
)
Fração de Vazio (%)
Estratificado
Anular
Bolhas Dispersas
Estratificado com Filme de Líquido

79
* 4 3 2 21,04 10 1,43 10 1,39 100 [%]EY (4.20)
* 2 22,65 10 2,54 11,21 [%]AY (4.21)
* 3 22,50 10 2,64 100 [%]BDY (4.22)
* 5 3 3 2 18,04 10 6,51 10 7,14 10 100 [%]EFLY (4.23)
* 4 3 3 2 11,07 10 4,77 10 4,09 10 100 [%]BD AY (4.24)
Figura 50 – Módulo e fase da admitância da sonda capacitiva para diferentes padrões de escoamento.
Frequência de 5 MHz.
Como pode ser visto na Figura 50, as curvas do módulo da admitância para
os escoamentos estratificado e anular possuem um formato parecido. Assim, para
escoamentos verticais, poderia ser obtido um único polinômio que descreva os dois
escoamentos. Isso foi feito, de forma que a equação (4.24) foi obtida com um
coeficiente de determinação de 0,999.
20
40
60
80
100
120
140
160
Mód
ulo
da A
dmit
ânci
a (µ
S)
0 20 40 60 80 100828384858687888990
Fração de Vazio (%)
Fas
e da
Adm
itân
cia
(Gra
us)
EstratificadoAnular
Bolhas DispersasEstratificado com Filme de Líquido

80
4.10 CONSIDERAÇÕES
Inicialmente, verificou-se a necessidade do uso de um modelo elétrico quase
estático para a caracterização dos eletrodos. Por meio deste modelo e do método dos
elementos finitos, foi obtida a admitância do sensor para diferentes frações de vazio e
padrões de escoamento. Através de regressões lineares, obtiveram-se polinômios que
permitem a estimativa do módulo da admitância para qualquer valor de fração de
vazio. No entanto, vale lembrar que os resultados obtidos são válidos apenas para a
frequência de realização das simulações (5 MHz), o que é uma limitação do modelo
quase estático.
Também foi feita uma breve análise da resolução espacial do sensor. Embora
o comprimento dos eletrodos de excitação e recepção seja de 32 mm, o sensor parece
ser sensível a uma região de aproximadamente 40 mm. Além disso, foi mostrado que
as dimensões dos eletrodos (até mesmo do de blindagem), devem ser escolhidas com
cautela. É importante que em trabalhos futuros sejam feitas simulações verificando a
influência destas dimensões na resposta espacial.
Por fim, os dados das simulações foram utilizados como entrada em um
modelo do circuito eletrônico de medição. Neste modelo, foram levadas em
consideração as capacitâncias parasitas dos cabos e eletrodos, bem como a limitação
de frequência do amplificador operacional utilizado. A resposta ainda foi comparada
com a saída obtida para um modelo ideal. Verificou-se que com a normalização dos
sinais de saída do sistema, há pouca diferença entre os casos ideal e não ideal. Além
disso, a saída normalizada ideal depende apenas dos valores absolutos das
admitâncias obtidas nas simulações, facilitando a obtenção da fração de vazio a partir
dos valores de tensão na saída do sistema.

81
5 TESTES E RESULTADOS
Nesta seção o funcionamento do sensor desenvolvido será avaliado em testes
experimentais. Inicialmente é apresentada a medição do tempo de resposta do
circuito, que deve estar em conformidade com a frequência de amostragem de 1 kHz
que havia sido especificada. Posteriormente, as respostas experimental e teórica do
sensor são comparadas através da mimetização de um escoamento estratificado em
bancada de testes estática. Também são apresentados resultados de experimentos
realizados em bancadas de escoamento vertical e horizontal com vazões de ar e água
controladas. Nestes experimentos a fração de vazio média do sensor é comparada com
valores medidos por um sensor de referência.
5.1 TEMPO DE RESPOSTA DO CIRCUITO
A resposta temporal do sistema determina a velocidade máxima que uma
estrutura diferente no escoamento pode ter sem que deixe de ser detectada. Ela é
limitada pelo circuito analógico e pela frequência de amostragem do conversor AD,
que havia sido pré-estabelecida em 1 kHz. É importante que o tempo de resposta do
circuito analógico seja compatível com este valor.
A resposta temporal do circuito analógico pode ser determinada por meio da
medição dos tempos de subida e descida do mesmo. O tempo de subida é o tempo que
a saída do circuito leva para variar de 10 % a 90 % de seu valor máximo ao ser
aplicado um degrau ascendente na entrada. Já o tempo de descida é dado para uma
variação de 90 % a 10 % com uma entrada em degrau descendente.
Para obtenção dos tempos de subida e descida, adotou-se o seguinte
procedimento: os eletrodos foram colocados em um tubo preenchido por água; ao
invés do eletrodo de excitação ser conectado à placa e consequentemente ao sinal
senoidal gerado pelo DDS, ele foi conectado a um gerador de sinais; o sinal do
gerador era uma senóide de 5 MHz modulada em amplitude por uma onda quadrada
de 500 Hz com tensões entre 0 V e 1 V; o sinal na saída do demodulador do circuito
foi medido com um osciloscópio. Dessa forma, a onda quadrada modulante funciona
como um degrau, ligando ou desligando subitamente o sinal de excitação senoidal dos
eletrodos de excitação. Foram obtidos respectivamente tempos de subida e descida de

82
54,4 ms e 496 ms, como pode ser observado na Figura 51.
Figura 51 – Tempos de subida e de descida do sistema.
A entrada é a onda quadrada que modula o sinal senoidal.
Para que uma oscilação seja detectada pelo circuito, ela deverá possuir
período superior ao dobro do maior tempo, que é de 496 ms. O inverso deste período
resulta numa frequência de 1,008 kHz, que é superior à frequência de amostragem de
1 kHz. O fato do tempo de descida ser muito superior ao tempo de subida é uma
característica intrínseca do demodulador utilizado, baseado num circuito detector de
pico.
5.2 TESTE ESTÁTICO
Para escoamento estratificado, os dados obtidos pelo método dos elementos
finitos foram comparados com medições feitas em uma bancada estática. A mesma
está representada na Figura 52. Um segmento de tubo de acrílico com 33 cm de
comprimento, 26 mm de diâmetro interno e 32 mm de diâmetro externo foi
posicionado horizontalmente sobre uma balança. Com a adição gradativa de água por
meio de um orifício na parte superior do duto, reproduziu-se a situação de
escoamento estratificado para diversos valores de frações de vazio. A fração
volumétrica de água no interior do tubo (e consequentemente a fração de vazio) pode
ser obtida facilmente pela razão entre a massa de água adicionada e a massa para
tubo cheio.
0 0,1 0,2
0
20
40
60
80
100
← →54,4µs
Ten
são
Nor
mal
izad
a (%
)
1 1,5 2
← →496µs
Tempo (ms)
EntradaSaída

83
Os testes foram realizados com água deionizada (condutividade menor que
5 mS/cm) a uma temperatura ambiente de 19 °C. Para cada nível de água, era feita
uma medição de 10 s com taxa de amostragem de 1 kHz. Os ensaios foram repetidos
cinco vezes e para cada realização foram medidos em média 15 pontos com variação
crescente do nível de água. Realizou-se ao todo 79 medições.
Os valores médios de cada um dos 79 pontos medidos, assim como os valores
absolutos da admitância que haviam sido obtidos nas simulações para escoamento
estratificado, foram normalizados para que pudessem ser comparados. A normalização
foi realizada por meio da equação (5.1), onde Y é o ponto a ser normalizado e maxY e
minY são respectivamente os valores medidos ou simulados para tubo cheio de água e
de ar. O resultado pode ser visto na Figura 53.
* 100 %min
max min
Y YY
Y Y
(5.1)
Como as frações de vazio dos pontos medidos e simulados são diferentes, não
é possível que eles sejam comparados diretamente. Assim, pelo método dos mínimos
quadrados, foi obtido um polinômio de terceiro grau que representa os 79 pontos
medidos experimentalmente e relaciona a saída do sensor com a fração de vazio. Ele
foi comparado com o polinômio das simulações para escoamento estratificado, dado
pela equação (4.20). O resultado é apresentado na Figura 54. No eixo direito do
gráfico é mostrada a diferença entre as respostas experimental e teórica. O maior
desvio foi de 3,44 %. Devido à normalização, a diferença é nula para frações de 0 % e
100 %. No entanto, pode ser observado que para baixas frações de vazio, a saída
experimental é superior à teórica e que o oposto ocorre para altas frações de vazio.
Possivelmente, este fato está relacionado com o formato do nível de líquido, que
Figura 52 – Representação esquemática da bancada de testes estáticos para escoamento estratificado.
33 cm Sensor
capacitivo
Balança

84
apresenta uma curvatura devido à tensão superficial da água. Esta curvatura não foi
considerada nas simulações por FEM.
A seção transversal do mesmo segmento de tubo utilizado nos experimentos
foi fotografada para diversos níveis de água. As fotos se encontram na Figura 55. O
contraste foi alterado para facilitar a visualização da interface ar-água. Para baixas
frações de vazio a interface se curva para cima na região das bordas, aumentando a
área molhada das paredes do tubo e possivelmente, o nível do sinal de saída do
sensor. Para altas frações de vazio, o oposto é observado.
Figura 53 – Comparativo entre admitâncias absolutas e pontos medidos para
escoamento estratificado em bancada estática.
Figura 54 – Comparativo entre saídas do escoamento estratificado para simulações e
bancada de testes estática.
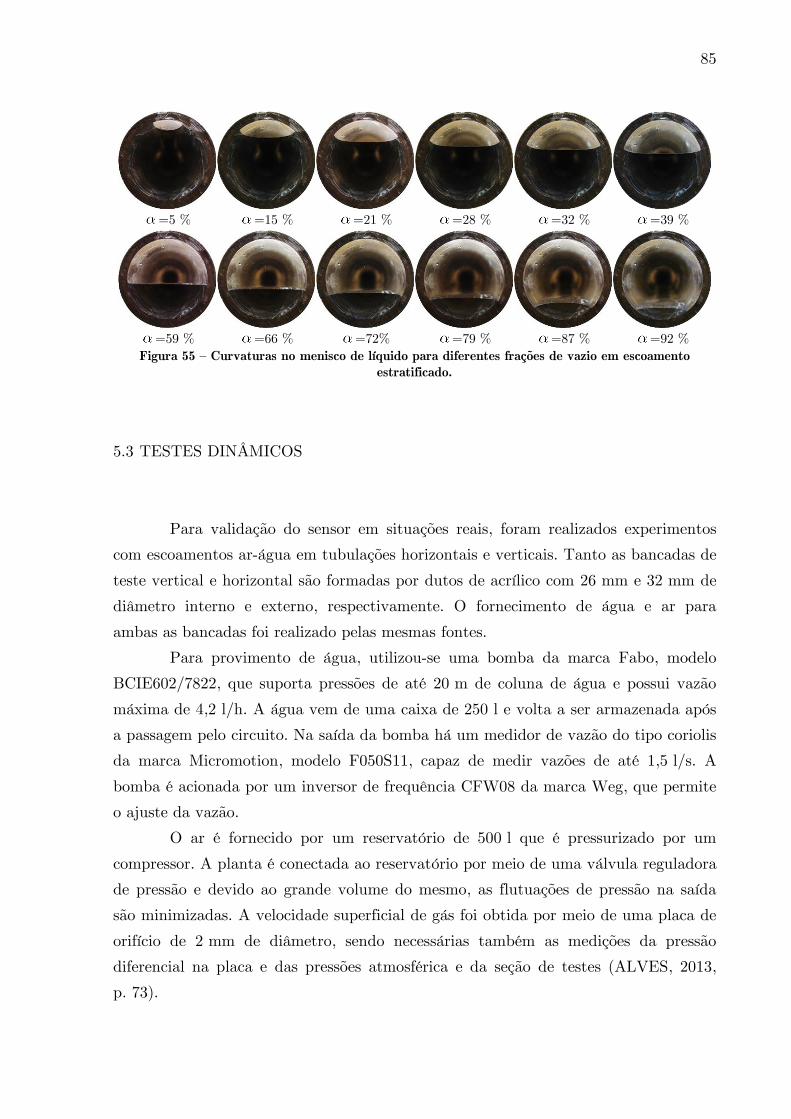
85
5.3 TESTES DINÂMICOS
Para validação do sensor em situações reais, foram realizados experimentos
com escoamentos ar-água em tubulações horizontais e verticais. Tanto as bancadas de
teste vertical e horizontal são formadas por dutos de acrílico com 26 mm e 32 mm de
diâmetro interno e externo, respectivamente. O fornecimento de água e ar para
ambas as bancadas foi realizado pelas mesmas fontes.
Para provimento de água, utilizou-se uma bomba da marca Fabo, modelo
BCIE602/7822, que suporta pressões de até 20 m de coluna de água e possui vazão
máxima de 4,2 l/h. A água vem de uma caixa de 250 l e volta a ser armazenada após
a passagem pelo circuito. Na saída da bomba há um medidor de vazão do tipo coriolis
da marca Micromotion, modelo F050S11, capaz de medir vazões de até 1,5 l/s. A
bomba é acionada por um inversor de frequência CFW08 da marca Weg, que permite
o ajuste da vazão.
O ar é fornecido por um reservatório de 500 l que é pressurizado por um
compressor. A planta é conectada ao reservatório por meio de uma válvula reguladora
de pressão e devido ao grande volume do mesmo, as flutuações de pressão na saída
são minimizadas. A velocidade superficial de gás foi obtida por meio de uma placa de
orifício de 2 mm de diâmetro, sendo necessárias também as medições da pressão
diferencial na placa e das pressões atmosférica e da seção de testes (ALVES, 2013,
p. 73).
=5 %
=15 %
=21 %
=28 %
=32 %
=39 %
=59 %
=66 %
=72%
=79 %
=87 %
=92 %
Figura 55 – Curvaturas no menisco de líquido para diferentes frações de vazio em escoamento estratificado.
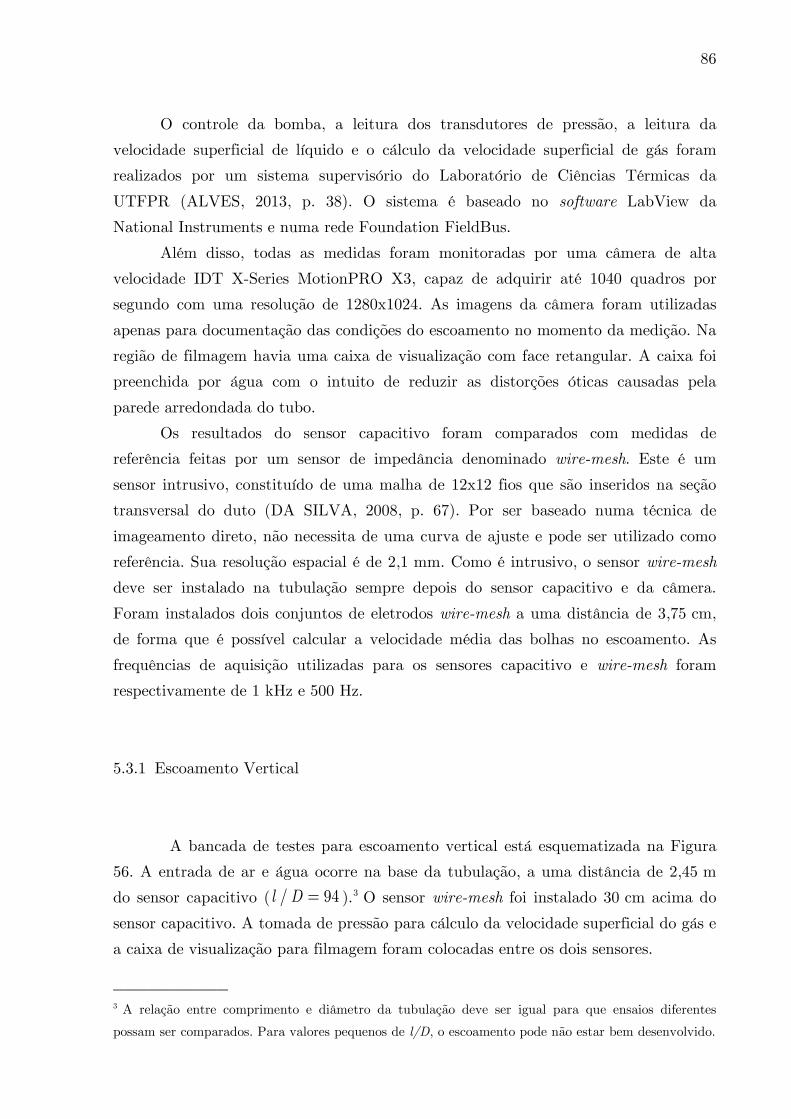
86
O controle da bomba, a leitura dos transdutores de pressão, a leitura da
velocidade superficial de líquido e o cálculo da velocidade superficial de gás foram
realizados por um sistema supervisório do Laboratório de Ciências Térmicas da
UTFPR (ALVES, 2013, p. 38). O sistema é baseado no software LabView da
National Instruments e numa rede Foundation FieldBus.
Além disso, todas as medidas foram monitoradas por uma câmera de alta
velocidade IDT X-Series MotionPRO X3, capaz de adquirir até 1040 quadros por
segundo com uma resolução de 1280x1024. As imagens da câmera foram utilizadas
apenas para documentação das condições do escoamento no momento da medição. Na
região de filmagem havia uma caixa de visualização com face retangular. A caixa foi
preenchida por água com o intuito de reduzir as distorções óticas causadas pela
parede arredondada do tubo.
Os resultados do sensor capacitivo foram comparados com medidas de
referência feitas por um sensor de impedância denominado wire-mesh. Este é um
sensor intrusivo, constituído de uma malha de 12x12 fios que são inseridos na seção
transversal do duto (DA SILVA, 2008, p. 67). Por ser baseado numa técnica de
imageamento direto, não necessita de uma curva de ajuste e pode ser utilizado como
referência. Sua resolução espacial é de 2,1 mm. Como é intrusivo, o sensor wire-mesh
deve ser instalado na tubulação sempre depois do sensor capacitivo e da câmera.
Foram instalados dois conjuntos de eletrodos wire-mesh a uma distância de 3,75 cm,
de forma que é possível calcular a velocidade média das bolhas no escoamento. As
frequências de aquisição utilizadas para os sensores capacitivo e wire-mesh foram
respectivamente de 1 kHz e 500 Hz.
5.3.1 Escoamento Vertical
A bancada de testes para escoamento vertical está esquematizada na Figura
56. A entrada de ar e água ocorre na base da tubulação, a uma distância de 2,45 m
do sensor capacitivo ( / 94l D ).3 O sensor wire-mesh foi instalado 30 cm acima do
sensor capacitivo. A tomada de pressão para cálculo da velocidade superficial do gás e
a caixa de visualização para filmagem foram colocadas entre os dois sensores.
3 A relação entre comprimento e diâmetro da tubulação deve ser igual para que ensaios diferentes
possam ser comparados. Para valores pequenos de l/D, o escoamento pode não estar bem desenvolvido.

87
Figura 56 – Representação esquemática da bancada de testes vertical.
Para facilitar a visualização, o desenho está fora de escala.
Por meio da variação das vazões de ar e água, selecionou-se 13 pontos de
medição abrangendo todos os limites da planta. Os pontos selecionados e as
respectivas médias das velocidades superficiais de gás e de líquido podem ser vistos no
mapa de fluxo da Figura 57. A partir de agora, cada ponto de medição será
referenciado pelo respectivo rótulo indicado no mapa (V1 a V13).
No decorrer dos testes, a temperatura ambiente variou entre 12,2 °C e
13,6 °C. A condutividade da água era de 69,5 µS/cm. Cada ponto foi medido
simultaneamente pelos sensores capacitivo e wire-mesh durante 20 s. Na Figura 58
podem ser vistas algumas imagens do escoamento para cada um dos 13 pontos.
Como visto na seção 4.6, para o sensor capacitivo, o escoamento vertical de
golfadas pode ser segmentado em escoamentos de bolhas dispersas e anular. Diante da
necessidade da obtenção de uma função de ajuste para determinação da fração de
vazio, optou-se pelo uso de uma única curva que descreva a resposta do sensor para
P 0,3
m2,
45 m
água
ar
0,8
m
Sensor wire-mesh
Câmera de altavelocidade
Sensorcapacitivo
Transdutor depressão
Caixa devisualização

88
os dois tipos de escoamento simultaneamente. Assim, o polinômio que havia sido
apresentado na equação (4.24) foi utilizado.
A saída normalizada do sensor capacitivo foi substituída na equação (4.24)
para obtenção dos valores de fração de vazio. Para cada medição realizada, as frações
Figura 57 – Mapa de fluxo de Taitel e Dukler para a bancada de testes vertical.
V1
V5
V2
V6
V9
V3
V7
V10
V12
V4
V8
V11
V13
Figura 58 – Fotos do escoamento para cada ponto medido na bancada vertical.

89
de vazio médias dos sensores de referência e capacitivo foram comparadas, como pode
ser visto na Figura 59.
Na Figura 60 pode ser vista a diferença entre as frações médias dos sensores
wire-mesh e capacitivo. O pior resultado foi obtido para o ponto V5. Pelas fotos do
momento dos testes, fica claro que neste ponto o escoamento era de bolhas dispersas.
Para os pontos V1, V6 e V9, os desvios foram superiores a 5 %. No caso V1 o
escoamento era de bolhas dispersas e em V6, embora existissem bolhas maiores, elas
estavam abaixo da resolução espacial do sensor. Para o ponto V9, em 57 % do tempo
haviam apenas bolhas dispersas na seção de teste, ou seja, o sensor detectou as
Figura 59 – Valores das frações de vazio médias para sensor capacitivo e sensor wire-mesh.
Escoamento Vertical.
Figura 60 – Diferença na fração de vazio média do sensor capacitivo em relação ao wire-mesh.
Escoamento Vertical.
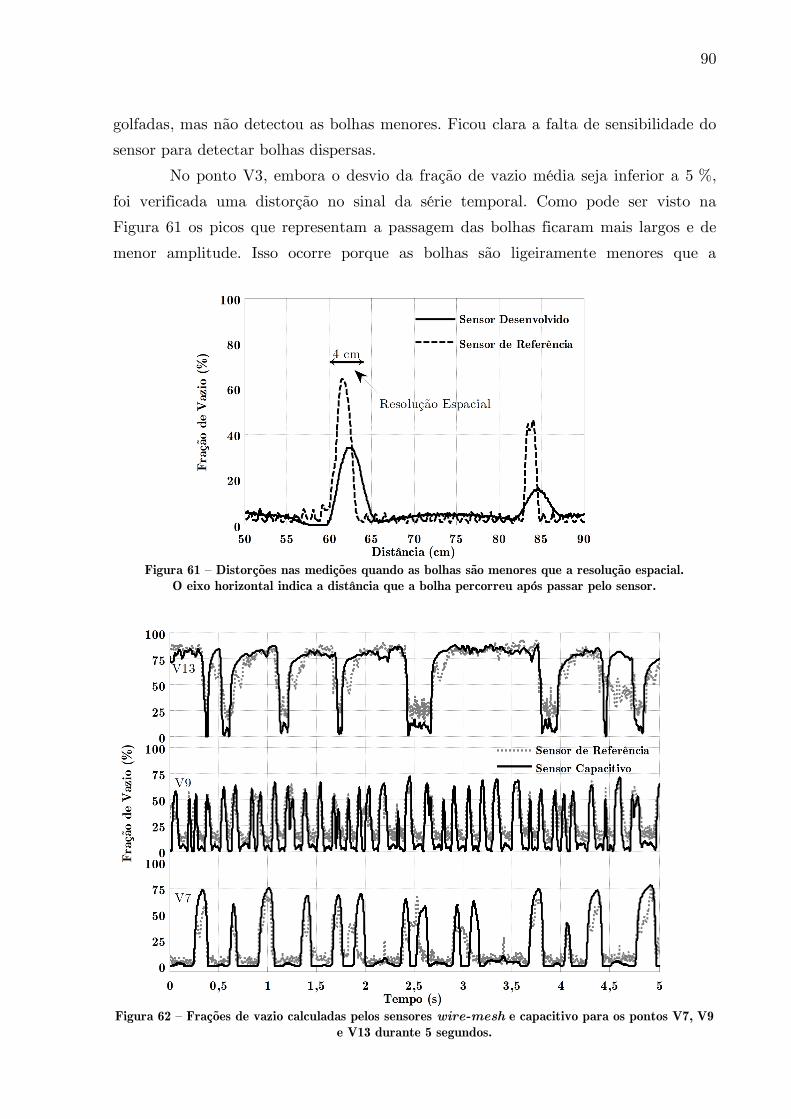
90
golfadas, mas não detectou as bolhas menores. Ficou clara a falta de sensibilidade do
sensor para detectar bolhas dispersas.
No ponto V3, embora o desvio da fração de vazio média seja inferior a 5 %,
foi verificada uma distorção no sinal da série temporal. Como pode ser visto na
Figura 61 os picos que representam a passagem das bolhas ficaram mais largos e de
menor amplitude. Isso ocorre porque as bolhas são ligeiramente menores que a
Figura 61 – Distorções nas medições quando as bolhas são menores que a resolução espacial.
O eixo horizontal indica a distância que a bolha percorreu após passar pelo sensor.
Figura 62 – Frações de vazio calculadas pelos sensores wire-mesh e capacitivo para os pontos V7, V9
e V13 durante 5 segundos.

91
resolução espacial do sensor. Para possibilitar a visualização da dimensão das bolhas
no gráfico, os dados foram convertidos do domínio temporal para o domínio espacial
com base na velocidade média das bolhas, que foi medida pelo sensor wire-mesh.
As séries temporais de 5 segundos de medição para os pontos V7, V9 e V13
estão apresentadas na Figura 62. Fica clara a capacidade do sensor desenvolvido de
detectar características dinâmicas do escoamento. Para o ponto V9, é possível
perceber que o sinal do sensor wire-mesh nunca atinge valores nulos de fração de
vazio. Isso ocorre devido à existência de bolhas dispersas. Já o sensor capacitivo, não
detecta estas bolhas. No APÊNDICE A podem ser vistos 5 segundos da série
temporal de todos os pontos medidos.
5.3.2 Escoamento Horizontal
A bancada de testes horizontal está representada na Figura 63. O sensor
capacitivo foi posicionado a 7,5 m da entrada de ar e água ( / 288l D ). O sensor de
referência foi colocado 30 cm após o sensor desenvolvido. Na seção de testes havia
ainda uma tomada de pressão para correção da velocidade superficial do gás e uma
caixa de visualização para filmagem.
Figura 63 – Representação Esquemática da Bancada de Testes Horizontal.
Para facilitar a visualização, o desenho está fora de escala.
P
0,3 m 6,9 m ar
1,1 m
Sensor wire-mesh
Câmera de alta velocidade
Sensor capacitivo
Transdutor de pressão
Caixa de visualização
água 0,3 m 0,3 m

92
Assim como nos testes de escoamento vertical, foram realizadas medições
para diversas vazões de água e ar, de forma que todos os limites da planta fossem
Figura 64 – Mapa de fluxo de Taitel e Dukler para a bancada de testes horizontal.
H1
H5
H9
H13
H2
H6
H10
H14
H3
H7
H11
H15
H4
H8
H12
H16
Figura 65 – Fotos do escoamento para cada ponto medido na bancada horizontal.
93
explorados. Cada um dos 16 pontos de medição está identificado por rótulos que vão
de H1 a H16 no mapa de fluxo da Figura 64. Imagens do escoamento para cada ponto
podem ser vistas na Figura 65.
A obtenção de uma curva de ajuste que converta a saída do sensor em valores
de fração de vazio não é tão simples como em escoamentos verticais. O escoamento
pode ser segmentado em regiões de bolhas dispersas e de bolhas alongadas. No
entanto, não é possível que os dois segmentos sejam representados por um único
polinômio, em face da grande diferença no formato das curvas para bolhas dispersas e
bolhas alongadas. Além disso, para as bolhas alongadas existem dois modelos
possíveis: o de escoamento estratificado (seção 4.3) ou estratificado com película
líquida (seção 4.6).
Olhando para a Figura 65 percebe-se que em alguns pontos como H6, H10 ou
H15, a parte frontal das golfadas está descolada da parede superior do tubo. Já nos
pontos H8, H12 e H16, este descolamento não acontece. Devido à inconstância desta
característica, optou-se pela utilização de uma curva de ajuste para bolhas alongadas
formada pela média ponderada das curvas para escoamento estratificado (caso sem
descolamento da bolha) e estratificado com película de líquido (caso com
descolamento). A curva de ajuste de bolhas alongadas é dada pela equação (5.2).
* *( ) ( ) ( ) ( ) %BA E EFLY Y fPE Y fPEFL (5.2)
Em (5.2), *EFLY e *
EY são respectivamente as funções que representam as
saídas normalizadas do sensor para os casos de escoamento estratificado com e sem
filme de líquido, dadas pelas equações (4.23) e (4.20). fPE e fPEFL são funções
utilizadas para realização da média ponderada, possuindo soma unitária e assumindo
valores entre zero e um. Como pode ser visto na parte inferior da Figura 66, para
frações de vazio abaixo de 85 %, fPEFL será igual a uma constante , que indica
quão descolada está a bolha da parede do tubo. Para valores acima de 85 %, esta
função decresce linearmente até atingir um valor nulo para =100 %. Este
decréscimo é necessário porque as simulações para o modelo estratificado com filme
de líquido não podem atingir frações de vazio de 100 % (devido ao filme de líquido, o
tubo nunca estará completamente vazio). Logo, nessa região a função geral será
representada principalmente pelo modelo estratificado comum. Na parte superior da
Figura 66 pode ser vista a função resultante da média ponderada para =0,5. A
função que representa as bolhas alongadas fica entre as outras duas funções enquanto

94
é menor que 85 %. Para maior que 85 % a função se aproxima da curva para
estratificado sem filme de líquido. Na região onde fPE e fPEFL são funções de
primeiro grau, BAY será um polinômio de quarto grau. No entanto, verificou-se que é
possível a representação de BAY por um polinômio de segundo grau sem perda
significativa de informações (coeficiente de determinação de 0,999).
Por fim, foi obtida uma função geral para o escoamento horizontal com base
na resposta do sensor para bolhas dispersas e na curva de bolhas alongadas
encontrada. Como os escoamentos de bolhas dispersas ocorrem apenas para baixas
frações de vazio, definiu-se que a curva para bolhas dispersas seria utilizada para
<20 %. Para frações entre 20 % e 35 %, as funções para bolhas dispersas e bolhas
alongadas foram interpoladas. Já para >35 %, foi utilizado o polinômio de bolhas
alongadas. A função resultante é dada por (5.3), onde BDY e BAY são
respectivamente os polinômios para bolhas dispersas e bolhas alongadas, dados pelas
equações (4.22) e (5.2). As funções fPBD e fPBA estão definidas na parte inferior da
Figura 67. Na parte superior, pode ser visto o resultado final.
( ) ( ) ( ) ( ) %Geral BD BAY Y fPBD Y fPBA (5.3)
Figura 66 – Curva de ajuste para bolhas alongadas obtida a partir de média ponderada.
Abaixo estão esquematizadas as funções que são multiplicadas pelas curvas de escoamento estratificado e estratificado com filme de líquido para obtenção da média ponderada (para l=0,75).

95
Figura 67 – Curva de ajuste para escoamento vertical obtida a partir de média ponderada.
Abaixo estão representadas as funções que são multiplicadas pelas curvas de bolhas dispersas e de bolhas alongadas (com l=0,5) para obtenção da média.
Para obtenção da fração de vazio, a saída normalizada do sensor foi aplicada
à função inversa de (5.3). Este procedimento foi repetido para todos os pontos de
medição com os seguintes valores de : 0, 0,25, 0,5, 0,75 e 1. Comparando a fração
de vazio média dos sensores de referência e desenvolvido, foram obtidos os desvios em
função de para todos os pontos. Isso está representado na Figura 68. Como pode
ser visto, para os pontos H1, H2 e H3 não há dependência do desvio com o fator de
0
50
100
Saíd
a N
orm
aliz
ada
(%)
Bolhas dispersas
Bolhas alongadas (λ = 0,5)
Média ponderada
0 20 40 60 80 1000
0,5
1
Fun
ção
Pon
dera
dora
Fração de Vazio
fPBA(α)
fPBD(α)
Figura 68 – Diferenças entre frações de vazio médias obtidas com sensor wire-mesh e sensor
desenvolvido para diferentes valores de .
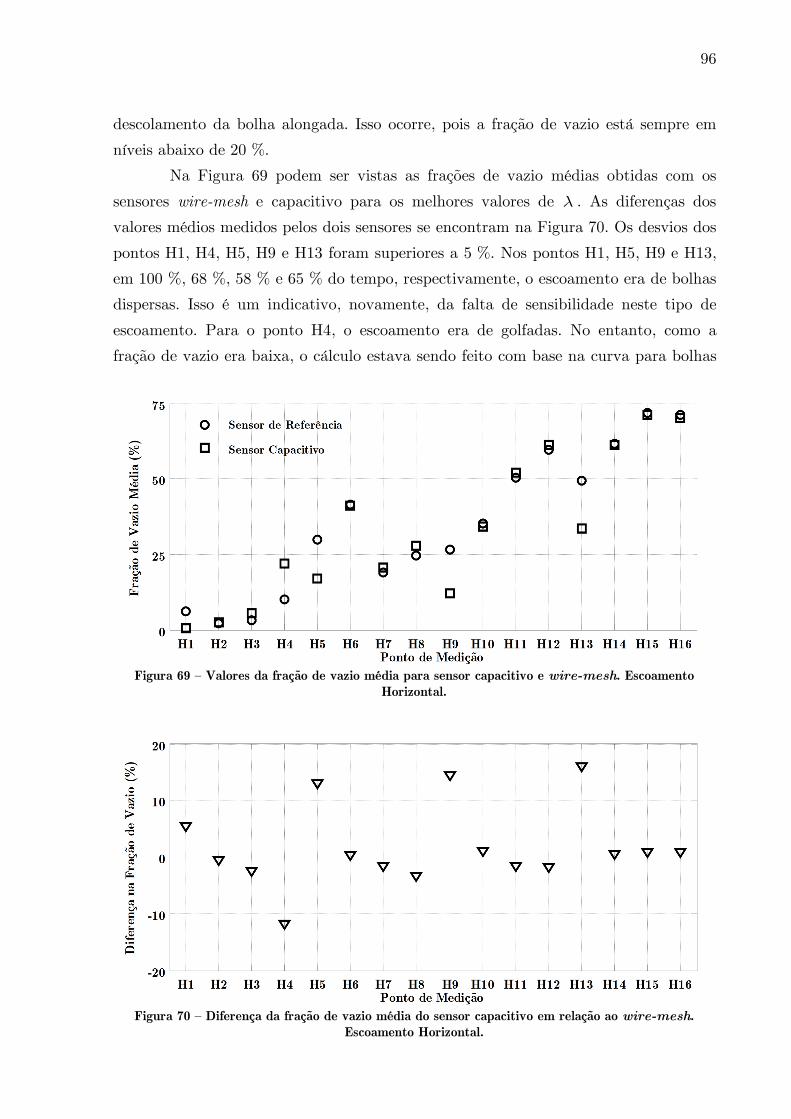
96
descolamento da bolha alongada. Isso ocorre, pois a fração de vazio está sempre em
níveis abaixo de 20 %.
Na Figura 69 podem ser vistas as frações de vazio médias obtidas com os
sensores wire-mesh e capacitivo para os melhores valores de . As diferenças dos
valores médios medidos pelos dois sensores se encontram na Figura 70. Os desvios dos
pontos H1, H4, H5, H9 e H13 foram superiores a 5 %. Nos pontos H1, H5, H9 e H13,
em 100 %, 68 %, 58 % e 65 % do tempo, respectivamente, o escoamento era de bolhas
dispersas. Isso é um indicativo, novamente, da falta de sensibilidade neste tipo de
escoamento. Para o ponto H4, o escoamento era de golfadas. No entanto, como a
fração de vazio era baixa, o cálculo estava sendo feito com base na curva para bolhas
Figura 69 – Valores da fração de vazio média para sensor capacitivo e wire-mesh. Escoamento
Horizontal.
Figura 70 – Diferença da fração de vazio média do sensor capacitivo em relação ao wire-mesh.
Escoamento Horizontal.

97
dispersas. Caso a curva de bolhas alongadas fosse utilizada (com =0), o desvio
cairia de 11,88 % para 0,5 %.
A princípio, a seleção do valor correto para o fator pode parecer inviável
na prática. No entanto, verificou-se que há uma relação entre e a velocidade média
das bolhas no escoamento. É natural que para velocidades mais altas, a região entre a
bolha alongada e a parede do tubo seja mais turbulenta, fazendo com que a espessura
da película de líquido aumente. As velocidades médias das bolhas foram medidas pelo
sensor wire-mesh e relacionadas com os valores ótimos de para cada ponto de
medição (o ponto H1 foi desconsiderado devido à ausência de golfadas). Pela
Figura 71 fica claro que um aumento da velocidade provoca um aumento do
ótimo.
Figura 71 – Relação entre a velocidade média das bolhas e o fator de descolamento que minimiza o
desvio entre os sensores de referência e desenvolvido.
As séries temporais para 5 segundos de cada ponto medido podem ser vistas
no APENDICE B. Para quase todos os pontos, as frações de vazio foram obtidas pela
equação (5.3). As únicas exceções são os pontos H2, H3 e H4, onde foi utilizada a
curva para bolhas alongadas com =0.
5.4 CONSIDERAÇÕES
As medições do tempo de subida e descida do circuito eletrônico mostraram
que o tempo de resposta do demodulador é compatível com a taxa de aquisição de
0 1 2 3 4 5 6 7
0
0,25
0,5
0,75
1
Velocidade média das bolhas (m/s)
λ ót
imo

98
1 kHz. Caso no futuro se deseje aumentar a taxa de amostragem, alterações nos
capacitores do circuito demodulador devem ser feitas.
Pelo menos para escoamentos do tipo estratificado, os testes da bancada
estática revelaram boa conformidade dos valores práticos com os teóricos, obtidos
pelo método dos elementos finitos. O desvio máximo foi de 3,4 % e acredita-se que
seja decorrente da tensão superficial da água, que fez com que a interface gás-líquido
sofresse deformações na região de contato com o tubo. Como trabalho futuro,
recomenda-se a repetição do experimento com um tubo de diâmetro maior.
Possivelmente o efeito da tensão superficial seria reduzido.
Nos ensaios para escoamento vertical e horizontal, o desvio do sensor para
medição de fração de vazio média ficou limitado a valores de 5 % quando a
quantidade de bolhas dispersas não era significativa. A falta de sensibilidade do
sensor para escoamentos de bolhas dispersas deve ser investigada. O sucesso do sensor
em escoamentos horizontais depende da medição da velocidade média das bolhas. O
hardware desenvolvido já contempla dois canais, havendo apenas necessidade de
alterações no software e no firmware para que a medição de velocidade se torne
possível. Principalmente para escoamentos horizontais, deve ser desenvolvida uma
rotina que identifique o padrão de escoamento com base na tensão normalizada de
saída do sistema, possibilitando a seleção da curva de ajuste correta. Para tanto, o
estudo da relação com o padrão de escoamento de informações estatísticas como
média, desvio padrão e histograma dos sinais de saída, é necessário.

99
6 CONSIDERAÇÕES FINAIS
A existência de escoamentos bifásicos na natureza e em diversos processos
industriais faz da compreensão de suas características um pré-requisito para o sucesso
dos projetos onde eles ocorrem. Um parâmetro importante para a caracterização
destes escoamentos é a fração de vazio. O uso de sensores de medição de fração de
vazio pode ocorrer em dois segmentos de aplicações: monitoramento de plantas onde
ocorram escoamentos bifásicos, assegurando a segurança operacional e melhoras na
produção; ou validação, em bancadas experimentais, de modelos matemáticos que
descrevem os escoamentos e consequentemente, poderão resultar em melhorias de
projetos futuros ou de operação de instalações já existentes.
Neste trabalho, foi desenvolvido um sistema de medição de fração de vazio
capacitivo e não invasivo. O sistema se baseia num arranjo de eletrodos de placas
côncavas que são instalados ao redor de um duto e operam com um sinal de excitação
senoidal de 5 MHz. Embora o trabalho tenha sido realizado para tubulações de
26 mm com escoamentos ar-água, poderia ser expandido para outras situações. A
taxa de amostragem de 1 kHz permitiu a visualização da dinâmica do escoamento. Os
dados são recebidos por uma interface ethernet e mostrados em um software
desenvolvido para o projeto.
Como a resposta deste tipo de sensor varia conforme o padrão de escoamento,
simulações foram realizadas pelo método dos elementos finitos de forma que os dados
lidos pudessem ser convertidos em valores de fração de vazio. Assim, curvas de ajuste
para escoamentos dos tipos anular, estratificado, intermitente e de bolhas dispersas
foram obtidas. Também por meio de simulações, verificou-se que o sistema possui
resolução espacial de 4 cm.
Experimentos em uma bancada de testes estática revelaram que pelo menos
para o escoamento do tipo estratificado, as respostas prática e simulada são muito
próximas, diferindo no máximo em 3,4 %. Também foram realizados ensaios em
tubulações horizontais e verticais com vazões de ar e de água controladas. As frações
de vazio médias obtidas pelo sistema foram comparadas com valores medidos por um
sensor de referência. Para escoamentos onde a quantidade de bolhas dispersas não era
significativa, obtiveram-se diferenças de até 5 %. Para os outros casos, este valor foi
de 16 %. Verificou-se ainda que para escoamentos intermitentes a curva de ajuste
utilizada é função da velocidade média das bolhas no escoamento.
Dessa forma, conclui-se que os objetivos do trabalho desenvolvido foram
100
cumpridos. O sistema possibilitou a visualização da dinâmica do escoamento e a
medição da fração de vazio dentro dos limites da técnica, com exceção do caso para
bolhas dispersas. Como principais contribuições podem ser citadas as simulações pelo
método dos elementos finitos, que permitiram a caracterização dos eletrodos de placas
côncavas e a constatação de que a velocidade média das bolhas também pode ser
utilizada nas curvas de ajuste para cálculo da fração de vazio.
6.1 TRABALHOS FUTUROS
Nos resultados experimentais o sensor pareceu não possuir sensibilidade para
escoamentos de bolhas dispersas, o que deve ser investigado com cautela. Recomenda-
se a realização de testes em tubulação vertical com injeção de ar por meio de uma
pedra porosa, de forma que o escoamento de bolhas dispersas possa ser obtido para
diferentes frações de vazio. A interferência de outros sensores que estejam na
tubulação também deve ser analisada. Isso poderia ser feito com a repetição das
simulações adicionando um eletrodo aterrado em contato com o líquido. Ainda
poderiam ser realizadas simulações que levassem em conta mudanças na distribuição
espacial das bolhas, uma vez que em escoamentos horizontais elas tendem a ficar na
parte superior do tubo.
Os eletrodos foram construídos com base em referências encontradas na
literatura, sem que fosse feito um estudo sobre as dimensões ideais. É importante que
sua geometria seja otimizada por meio de simulações de forma a aumentar a
resolução espacial e homogeneizar a sensibilidade espacial na região de medição. O
uso de eletrodos de guarda lateral poderia minimizar os efeitos de borda e permitir o
uso de eletrodos de blindagem maiores sem a ocorrência do sobressinal apresentado
na seção 4.7. O estudo dos eletrodos também deve procurar a minimização de
interferências provocadas por outros sensores.
Nos escoamentos intermitentes a segmentação foi feita por meio de limiares
de fração de vazio. Em alguns casos isso gerou erros, como para o ponto H4
apresentado na seção 5.3.2, onde a fração de vazio de um escoamento estratificado foi
calculada pela curva de ajuste de bolhas dispersas. É importante que dados
estatísticos como desvio padrão e histograma da saída do sensor também sejam
utilizados na identificação do padrão escoamento e seleção da curva de ajuste a ser
utilizada. A velocidade média das bolhas mostrou ser um parâmetro importante para

101
cálculo da fração de vazio. Logo, o software e o firmware devem ser atualizados para
fornecerem suporte à medição simultânea com dois canais, possibilitando o cálculo da
velocidade. Todo processamento para cálculo de fração de vazio foi feito em um
computador após as medições. Alterações no firmware poderiam ser realizadas para
que isso fosse realizado pelo microcontrolador em tempo real.
Por fim, todos os experimentos e simulações poderiam ser repetidos para
outros valores de condutividade de água, variadas frequências de excitação, diversos
fluidos e tubulações com diâmetros diferentes. É esperado que o uso de uma
tubulação de diâmetro maior reduza os desvios dos testes da bancada estática
horizontal, pois o efeito da distorção no menisco de água seria menor.

102

103
REFERÊNCIAS
ALVES, Rafael F. Estudo Experimental da Influência da Pressão no Escoamento Bifásico Gás-Líquido em Golfadas em Dutos Horizontais. 2013. 92 p. TCC - UTFPR, Curitiba, 2013.
DO AMARAL, Carlos E. F.; ALVES, Rafael F.; DA SILVA, Marco J.; ARRUDA, Lúcia V. R.; DORINI, Leyza; MORALES, Rigoberto E. M.; PIPA, Daniel R. Image processing techniques for high-speed videometry in horizontal two-phase slug flows. Flow Measurement and Instrumentation, 2013.
ASHER, Ray C. Ultrasonic sensors in the chemical and process industries. Journal of Physics E: Scientific Instruments, v. 16, n. 10, p. 959–963, 1983.
BERTOLA, Volfango. Two-phase flow measurement techniques. In: V. Bertola (Ed.). Modelling and Experimentation in Two-Phase Flow. Wien: Springer-Verlag Wien, 2003.
BIEBERLE, André; HÄRTING, Hans-Ulrich; RABHA, Swapna; SCHUBERT, Markus; HAMPEL, Uwe. Gamma-Ray Computed Tomography for Imaging of Multiphase Flows. Chemie Ingenieur Technik, v. 85, n. 7, p. 1002–1011, 2013.
BIEBERLE, Martina; FISCHER, Frank; SCHLEICHER, Eckhard; MENZ, Hans-Jürgen; MAYER, Hans-Georg; HAMPEL, Uwe. Ultrafast Cross-Sectional Imaging of Gas-Particle Flow in a Fluidized Bed. AIChE Journal, v. 56, n. 8, p. 2221–2225, 2010.
BO, Oystein L.; NYFORS, Ebbe. Application of microwave spectroscopy for the detection of water fraction and water salinity in water/oil/gas pipe flow. Journal of Non-Crystaline Solids, v. 305, p. 345–353, 2002.
BOYER, Christophe; DUQUENNE, Anne-Marie; WILD, Gabriel. Measuring Techniques in Gas—Liquid and Gas—Liquid—Solid Reactors. ChemInform, v. 34, n. 7, p. 3185 – 3215, 2003.
CANIÈRE, Hugo; T’JOEN, Christophe; WILLOCKX, Arnout; PAEPE, Michel De; CHRISTIANS, Marcel; ROOYEN, Eugene Van; LIEBENBERG, Leon; MEYER, Josua P. Horizontal two-phase flow characterization for small diameter tubes with a

104
capacitance sensor. Measurement Science and Technology, v. 18, n. 9, p. 2898–2906, 2007.
CHENG, Lixin; RIBATSKI, Gherhardt; THOME, John R. Two-Phase Flow Patterns and Flow-Pattern Maps: Fundamentals and Applications. Applied Mechanics Reviews, v. 61, n. 5, 2008.
CHUN, Moon-hyun; SUNG, Chang-kyung. Parametric Effects on the Void Fraction Measurement by Capacitance Transducers. International Journal of Multiphase Flow, v. 12, n. 4, p. 627–640, 1986.
CROWE, Clayton T.; MICHAELIDES, Efstathios E. Basic Concepts and Definitions. In: C. T. Crowe (Ed.). Multiphase Flow Handbook. Boca Raton: CRC Press, 2006.
DEMORI, Marco; FERRARI, Vittorio; STRAZZA, Domenico; POESIO, Pietro. A capacitive sensor system for the analysis of two-phase flows of oil and conductive water. Sensors and Actuators A: Physical, v. 163, n. 1, p. 172–179, 2010. Elsevier B.V.
DEVIA, Francesco; FOSSA, Marco. Design and optimisation of impedance probes for void fraction measurements. Flow Measurement and Instrumentation, v. 14, n. 4-5, p. 139–149, 2003.
DUNKELS, Adam. Design and Implementation of the lwIP TCP/IP Stack. 2001. Swedish Institute of Computer Science.
ELKOW, Kenneth J.; REZKALLAH, Kamiel S. Void fraction measurements in gas - liquid flows using capacitance sensors. Measurement Science and Technology, v. 7, n. 8, p. 1153–1163, 1996.
FALCONE, Gioia; HEWITT, Geoffrey F.; ALIMONTI, Claudio. Multiphase Flow Metering: Principles and Applications. 1 st. ed. Elsevier B.V., 2009.
FOSSA, Marco. Design and performance of a conductance probe for measuring the liquid fraction in two-phase gas-liquid flows. Flow Measurement and Instrumentation, v. 9, n. 2, p. 103–109, 1998.

105
GERAETS, J. J. M.; BORST, J. C. A Capacitance Sensor for Two-Phase Void Fraction Measurement and Flow Pattern Identification. International Journal of Multiphase Flow, v. 14, n. 3, p. 305–320, 1988.
GREGORY, Garry A.; MATTAR, Louis. An In-Situ Volume Fraction Sensor for Two-Phase Flows of Non-Electrolytes. The Journal of Canadian Petroleum Technology, v. 12, n. 2, 1973.
HALLIDAY, David; RESNICK, Robert; WALKER, Jearl. Fundamentos de Física, Volume 3: Eletromagnetismo. 8. ed. Rio de Janeiro: LTC, 2009.
HAMMER, Erling A. Advanced Experimental Techniques. In: C. T. Crowe (Ed.). Multiphase Flow Handbook. Boca Raton: CRC Press, 1996.
HAMPEL, Uwe; SPECK, Martina; KOCH, Dieter; MENZ, Hans-Jürgen; MAYER, Hans-Georg; FIETZ, Jürgen; HOPPE, Dietrich; SCHLEICHER, Eckhard; ZIPPE, Cornelius; PRASSER, Horst-Michael. Experimental ultra fast X-ray computed tomography with a linearly scanned electron beam source. Flow Measurement and Instrumentation, v. 16, n. 2-3, p. 65–72, 2005.
HAUS, Hermann A.; MELCHER, James R. Electromagnetic Fields and Energy. Massachusetts: MIT OpenCourseWare, 1989.
HOFFMANN, Rainer; JOHNSON, G. William. Measuring phase distribution in high pressure three-phase flow using gamma densitometry. Flow Measurement and Instrumentation, v. 22, n. 5, p. 351–359, 2011. Elsevier Ltd.
HORI, Keiichi; FUJIMOTO, Tetsuro; KAWANISHI, Kohei; NISHIKAWA, Hideo. Development of an ultrafast X-ray computed tomography scanner system: Application for measurement of instantaneous void distribution of gas-liquid two-phase flow. Heat Transfer-Asian Research, v. 29, n. 3, p. 155–165, 2000.
HOYLE, Brian S. Process tomography using ultrasonic sensors. Measurement Science and Technology, v. 7, n. 3, p. 272–280, 1996.
HUANG, Songming M.; STOTT, A. Les; GREEN, Robert G.; BECK, Maurice S. Electronic transducers for industrial measurement of low value capacitances. Journal of Physics E: Scientific Instruments, v. 21, p. 242–250, 1988.
106
IAEA. Industrial Process Gamma Tomography. Vienna, Austria, 2008.
ISHII, Mamoru; HIBIKI, Takashi. Thermo-Fluid Dynamics of Two-Phase Flow. 2 nd. ed. New York: Springer, 2011.
ISMAIL, Basel; AHMED, Wael. Innovative Techniques For Two-Phase Flow Measurements. Recent Patents on Electrical Engineeringe, v. 1, n. 1, p. 1–13, 2008.
JOHANSEN, G. A.; FRØYSTEIN, T.; HJERTAKER, B. T.; OLSEN, Ø. A dual sensor flow imaging tomographic system. Measurement Science and Technology, v. 7, n. 3, p. 297–307, 1996.
JONES, Owen C.; DELHAYE, Jean-Marc. Transient and statistical measurement techniques for two-phase flows: a critical review. International Journal of Multiphase Flow, v. 3, n. 2, p. 89–116, 1976.
KANNO, Masato. Measurements and Applications of Small Capacitances. Oyo Buturi, v. 49, n. 9, 1980. Oyo Buturi, Japan.
MAXWELL, James C. A Treatise on Electricity and Magnetism. 1 st. ed. Oxford: Clarendon Press, 1873.
MIYA, Masayoshi; WOODMANSEE, Donald E.; HANRATTY, Thomas J. A model for roll waves in gas-liquid flow. Chemical Engineering Science, v. 26, n. 11, p. 1915–1931, 1971.
NYFORS, Ebbe; VAINIKAINEN, Petri. Industrial Microwave Sensors. In: INTERNATIONAL MICROWAVE CONFERENCE, 10., 1994, Ksiaz Castle, Poland. Proceedings... Ksiaz Castle, Poland: Telecommunications Research Institute, 1994. p. 45–54.
O’MALLEY, John. Análise de Circuitos. 2. ed. São Paulo: Makron Books, 1993.
OLIEMANS, René V. A.; POTS, Bert F. M. Gas-Liquid Transport in Ducts. In: C. T. Crowe (Ed.). Multiphase Flow Handbook. Boca Raton: CRC Press, 2006.
PERTENCE JR, Antonio. Eletrônica Analógica: Amplificadores Operacionais e Filtros Ativos. 7. ed. Porto Alegre: Tekne, 2012.

107
PEYTON, Anthony; WALSH, Vincent. Analog Electronics with Op-amps: A Source Book of Practical Circuits. New York: Cambridge University Press, 1993.
PHOTRON. Fastcam SA-X2: high performance high-speed camera system - datasheet. San Diego, CA, 2013.
ROSS, Amy; STOBIE, Gordon. Well Testing - An Evaluation of Test Separators and Multiphase Flow Meters. In: INTERNATIONAL NORTH SEA FLOW MEASUREMET WORKSHOP, 28, 2010, St. Andrews, UK. Proceedings... St. Andrews, UK: TUV NEL, 2010. p. 244–265.
SCHLEICHER, E.; DA SILVA, M. J.; THIELE, S.; LI, A.; WOLLRAB, E.; HAMPEL, U. Design of an optical tomograph for the investigation of single- and two-phase pipe flows. Measurement Science and Technology, v. 19, n. 9, 2008.
SCUSSIATO, Eduardo. Medidor de Fração de Água para Escoamento Bifásico (Água e Óleo) Utilizando Técnicas de Micro-ondas e Cavidades Ressonantes. 2010. Dissertação - UFSC, 2010.
SHI, Yanyan; DONG, Feng; TAN, Chao. Conductance probe for the measurement of liquid volume fraction and axial velocity in gas-liquid two phase flow. In: NTERNATIONAL CONFERENCE ON ELECTRONIC MEASUREMENT & INSTRUMENTS, 9, 2009. Proceedings... Ieee, 2009. p. 2–826–2–831.
SHOHAM, Ovadia. Mechanistic Modeling of Gas-Liquid Two-Phase Flow in Pipes. 1 st. ed. Richardson, EUA: Society of Petroleum Engineers, 2006.
SHU, Ming T.; WEINBERGER, Charles B.; LEE, Young H. A Simple Capacitance Sensor for Void Fraction Measurement in Two-Phase Flow. Industrial and Engineering Chemistry Fundamentals, v. 21, n. 2, p. 175–181, 1982.
SIHVOLA, Ari H. Electromagnetic Mixing Formulas and Applications. London: The Institution of Electrical Engineers, 1999.
DA SILVA, Marco J. Impedance Sensors for Fast Multiphase Flow Measurement and Imaging. 2008. 154 f. Tese - Technische Universität Dresden, 2008.
108
STRAZZA, Domenico; DEMORI, Marco; FERRARI, Vittorio; POESIO, Pietro. Capacitance sensor for hold-up measurement in high-viscous-oil/conductive-water core annular flows. Flow Measurement and Instrumentation 2011.
STRIZZOLO, Cristina N.; CONVERTI, José. Capacitance sensors for measurement of phase volume fraction in two-phase pipelines. IEEE Transactions on Instrumentation and Measurement, v. 42, n. 3, p. 726–729, 1993.
TAITEL, Yemada; DUKLER, Abe E. A Model for Predicting Flow Regime Transitions in Horizontal and Near Horizontal Gas-Liquid Flow. AIChE Journal, v. 22, n. 1, p. 47–55, 1976.
TEYSSEDOU, Alberto; TYE, Peter. A capacitive two-phase flow slug detection system. Review of Scientific Instruments, v. 70, n. 10, p. 3942, 1999.
THOME, John R. Void Fractions in Two-Phase Flows. In: J. R. Thome (Ed.). Engineering Data Book III. 1 st, ed. Lausanne: Wolverine Tube, 2007a.
THOME, John R. Two-Phase Flow Patterns. In: J. R. Thome (Ed.). Engineering Data Book III. 1 st. ed. Lausanne: Wolverine Tube, 2007b.
THORN, Richard; JOHANSEN, Geir A.; HJERTAKER, Bjørn T. Three-phase flow measurement in the petroleum industry. Measurement Science and Technology, v. 24, n. 1, 2013.
VAZ, Cenalo. Electromagnetic Theory. 1 st. ed. Cincinnati: University of Cincinnati, 2006.
WALDSCHMIDT, Dayson R. Desenvolvimento de um Medidor de Fração de Água Utilizando Tecnologia de Microondas. 2008. 131 f. Dissertação - UFSC, 2008.
WARSITO; OHKAWA, M.; KAWATA, N.; UCHIDA, S. Cross-sectional distributions of gas and solid holdups in slurry bubble column investigated by ultrasonic computed tomography. Chemical Engineering Science, v. 54, 1999.
WU, Zhipeng; MCCANN, Hugh; DAVIS, Lionel E.; HU, Jin-Lin; FONTES, Adolfo; XIE, Cheng-Gang. Microwave-tomographic system for oil- and gas-multiphase-flow imaging. Measurement Science and Technology, v. 20, n. 10, 2009.

109
WYLIE, Stephen R.; SHAW, Andrew; AL-SHAMMA’A, Ahmed I. Real-Time Measurements of Oil, Gas and Water Contents Using an EM Wave Sensor for Oil-Marine-Environment Industries. In: EUROPEAN MICROWAVE CONFERENCE, 36, 2006a, Manchester, UK. Proceedings... Manchester, UK: EuMA, 2006. p. 451–454.
WYLIE, Stephen R.; SHAW, Andrew; AL-SHAMMA’A, Ahmed I. RF sensor for multiphase flow measurement through an oil pipeline. Measurement Science and Technology, v. 17, n. 8, p. 2141–2149, 2006b.
YANG, Wuqiang; LI, Yi; WU, Zhipeng; TSAMAKIS, Dimitrios; LEARMONTH, David; XIE, Cheng-Gang; HUANG, Songming; LENN, Chris; CUTLER, Annette. Multiphase flow measurement by electrical capacitance tomography. In: IEEE INTERNATIONAL CONFERENCE ON IMAGING SYSTEMS AND TECHNIQUES, 2011, Penang. Proceedings... Penang: Ieee, 2011. p. 108–111.
YANG, Wuqiang Q. Hardware Design of Electrical Capacitance Tomography Systems. Measurement Science and Technology, v. 7, p. 225–232, 1996.
YE, Jiamin; PENG, Lihui; WANG, Weirong; ZHOU, Wenxing. Helical Capacitance Sensor-Based Gas Fraction Measurement of Gas – Liquid Two-Phase Flow in Vertical Tube With Small Diameter. IEEE Sensors Journal, v. 11, n. 8, p. 1704–1710, 2011.

110

111
APÊNDICE A – SÉRIES TEMPORAIS (ESCOAMENTO VERTICAL)

112
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5 50
25
50
75
1000
25
50
75
1000
25
50
75
1000
25
50
75
1000
25
50
75
1000
25
50
75
100
V8
V9
V10
V11
V12
V13
Tempo (s)
Fra
ção
de V
azio
(%
)
Sensor de Referência
Sensor Capacitivo

113
APÊNDICE B – SÉRIES TEMPORAIS (ESCOAMENTO HORIZONTAL)
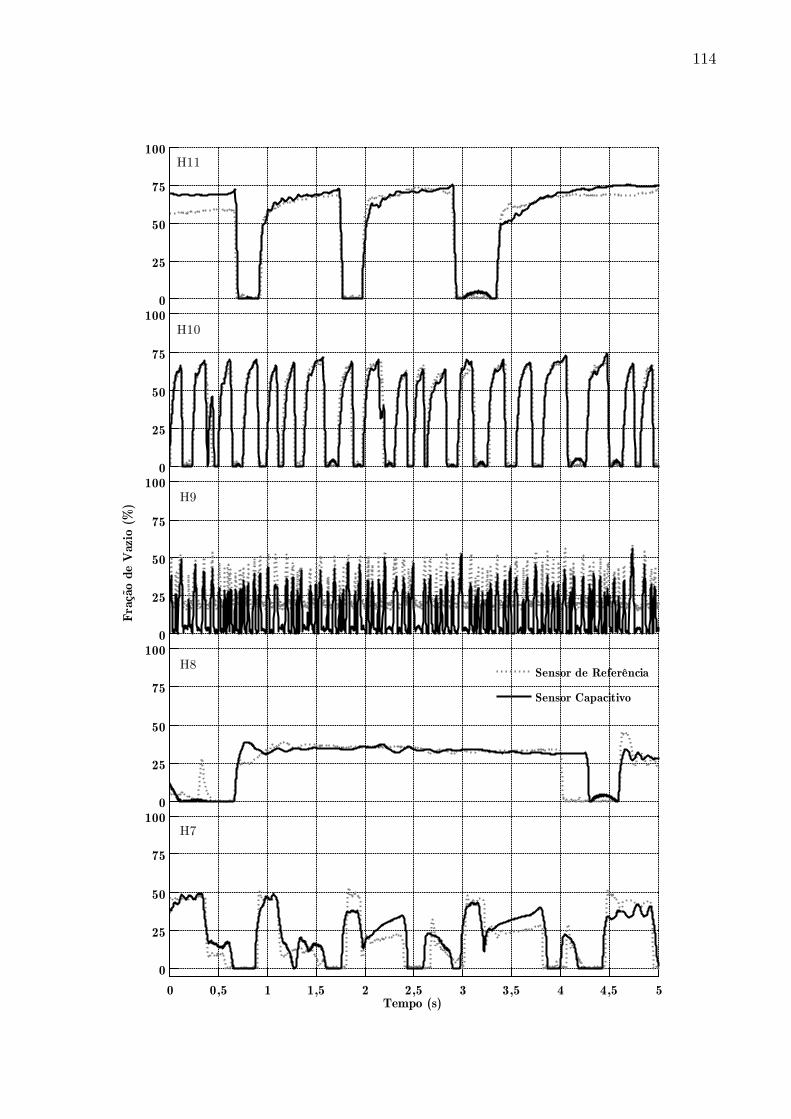
114
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5
0
25
50
75
1000
25
50
75
1000
25
50
75
1000
25
50
75
1000
25
50
75
100
H7
H8
H9
H10
H11
Tempo (s)
Fra
ção
de V
azio
(%
)
Sensor de Referência
Sensor Capacitivo

115
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5
0
25
50
75
1000
25
50
75
1000
25
50
75
1000
25
50
75
1000
25
50
75
100
H12
H13
H14
H15
H16
Tempo (s)
Fra
ção
de V
azio
(%
)
Sensor de Referência
Sensor Capacitivo
Top Related